WO2017208498A1 - 非接触給電システム及び非接触電力伝送システム - Google Patents
非接触給電システム及び非接触電力伝送システム Download PDFInfo
- Publication number
- WO2017208498A1 WO2017208498A1 PCT/JP2017/003764 JP2017003764W WO2017208498A1 WO 2017208498 A1 WO2017208498 A1 WO 2017208498A1 JP 2017003764 W JP2017003764 W JP 2017003764W WO 2017208498 A1 WO2017208498 A1 WO 2017208498A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- primary
- power
- control circuit
- measurement value
- target value
- Prior art date
Links
Images



Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/10—Circuit arrangements or systems for wireless supply or distribution of electric power using inductive coupling
- H02J50/12—Circuit arrangements or systems for wireless supply or distribution of electric power using inductive coupling of the resonant type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60M—POWER SUPPLY LINES, AND DEVICES ALONG RAILS, FOR ELECTRICALLY- PROPELLED VEHICLES
- B60M7/00—Power lines or rails specially adapted for electrically-propelled vehicles of special types, e.g. suspension tramway, ropeway, underground railway
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/10—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles characterised by the energy transfer between the charging station and the vehicle
- B60L53/12—Inductive energy transfer
- B60L53/122—Circuits or methods for driving the primary coil, e.g. supplying electric power to the coil
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/30—Constructional details of charging stations
- B60L53/35—Means for automatic or assisted adjustment of the relative position of charging devices and vehicles
- B60L53/38—Means for automatic or assisted adjustment of the relative position of charging devices and vehicles specially adapted for charging by inductive energy transfer
- B60L53/39—Means for automatic or assisted adjustment of the relative position of charging devices and vehicles specially adapted for charging by inductive energy transfer with position-responsive activation of primary coils
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/80—Circuit arrangements or systems for wireless supply or distribution of electric power involving the exchange of data, concerning supply or distribution of electric power, between transmitting devices and receiving devices
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/00032—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries characterised by data exchange
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/00032—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries characterised by data exchange
- H02J7/00034—Charger exchanging data with an electronic device, i.e. telephone, whose internal battery is under charge
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J2207/00—Indexing scheme relating to details of circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J2207/20—Charging or discharging characterised by the power electronics converter
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/12—Electric charging stations
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/14—Plug-in electric vehicles
Definitions
- the present invention generally relates to a non-contact power supply system and a non-contact power transmission system, and more particularly to a non-contact power supply system and a non-contact power transmission system that perform non-contact power transmission to a power supply target.
- the power supply apparatus includes a power transmission unit, a first acquisition unit, a control unit, a second acquisition unit, and a correction unit.
- the power transmission unit is disposed opposite to the power reception unit of the power receiving side device with a space therebetween.
- a 1st acquisition means acquires the 1st characteristic value which concerns on the electric power supplied to a power transmission part with a 1st period.
- the control means controls the electric power based on the first characteristic value so that the electric power supplied to the power transmission unit approaches the first command value.
- a 2nd acquisition means acquires the 2nd command value transmitted from a power receiving side apparatus, and the 2nd characteristic value concerning electric power received by the power receiving part for every 2nd period. Then, the correcting unit corrects the first command value based on the second command value and the second characteristic value.
- the first command value (primary target value) is corrected based only on the second command value (secondary target value) and the second characteristic value (secondary measurement value). For this reason, the conventional example has a problem that it is difficult to quickly bring the secondary measurement value close to the secondary target value.
- the present invention has been made in view of the above points, and an object of the present invention is to provide a non-contact power feeding system and a non-contact power transmission system in which a secondary measurement value can be easily brought close to a secondary target value.
- the contactless power supply system includes a primary circuit and a primary control circuit.
- the primary circuit supplies primary power to the feeding coil.
- the primary control circuit controls the primary circuit.
- the primary control circuit is configured to acquire a primary measurement value that is a measurement value of the primary power.
- the primary control circuit performs secondary control on a secondary measurement value that is a measurement value of secondary power received by a receiving coil that is electromagnetically coupled to the power supply coil, and a secondary target value that is a target value of the secondary power.
- the primary control circuit is configured to repeatedly execute a control process and an update process alternately.
- the control process is a process of controlling the primary circuit so that the primary measurement value matches a primary target value that is a target value of the primary power.
- the update process is a process for updating the primary target value.
- the update process includes a process of calculating the primary target value based on the transmission efficiency determined by the primary measurement value and the secondary measurement value and the secondary target value.
- a non-contact power transmission system includes the above-described non-contact power feeding system, a power feeding coil, a power receiving coil, and a secondary control circuit.
- the primary power is supplied to the feeding coil.
- the power receiving coil is electromagnetically coupled to the power feeding coil.
- the secondary control circuit is configured to acquire a secondary measurement value that is a measurement value of secondary power supplied to the power receiving coil.
- the secondary control circuit is configured to transmit the secondary measurement value and a secondary target value that is a target value of the secondary power to the primary control circuit.
- FIG. 1A is a block diagram of a contactless power feeding system and a contactless power transmission system according to Embodiment 1 of the present invention.
- FIG. 1B is a flowchart showing the operation of the above non-contact power feeding system.
- FIG. 2 is a schematic diagram of an application example of the above non-contact power feeding system.
- FIG. 3A is an explanatory diagram of a specific example of the operation of the above non-contact power feeding system.
- FIG. 3B is an explanatory diagram of a specific example of the operation of the contactless power feeding system of the comparative example.
- FIG. 4 is a flowchart showing the operation of the non-contact power feeding system according to the second embodiment of the present invention.
- FIG. 5 is an explanatory diagram of the operation of the above non-contact power feeding system.
- FIG. 6A is an explanatory diagram of control when it is considered that the transmission efficiency cannot be calculated correctly.
- FIG. 6B is an explanatory diagram of control in the above non-contact power feeding system.
- the non-contact electric power feeding system 2 which concerns on Embodiment 1 of this invention is provided with the primary circuit 21 and the primary control circuit 22, as shown to FIG. 1A.
- the primary circuit 21 supplies primary power to the feeding coil 31.
- the primary control circuit 22 controls the primary circuit 21.
- the primary control circuit 22 is configured to acquire a primary measurement value that is a measurement value of primary power.
- the primary control circuit 22 performs secondary control on a secondary measurement value that is a measurement value of the secondary power received by the power receiving coil 41 that is electromagnetically coupled to the power supply coil 31 and a secondary target value that is a target value of the secondary power. It is configured to obtain from the circuit 5.
- the primary control circuit 22 is configured to repeatedly execute a control process and an update process alternately.
- the control process is a process of controlling the primary circuit 21 so that the primary measurement value matches the primary target value that is the target value of the primary power.
- the update process is a process for updating the primary target value.
- the update process includes a process of calculating the primary target value based on the transmission efficiency determined by the primary measurement value and the secondary measurement value and the secondary target value.
- the non-contact power transmission system 1 of the present embodiment includes a non-contact power feeding system 2, a power feeding coil 31, a power receiving coil 41, and a secondary control circuit 5, as shown in FIG. 1A.
- Primary power is supplied to the feeding coil 31.
- the power receiving coil 41 is electromagnetically coupled to the power feeding coil 31.
- the secondary control circuit 5 is configured to acquire a secondary measurement value that is a measurement value of the secondary power supplied to the power receiving coil 41.
- the secondary control circuit 5 is configured to transmit the secondary measurement value and the secondary target value that is the target value of the secondary power to the primary control circuit 22.
- the non-contact power feeding system 2 and the non-contact power transmission system 1 of the present embodiment will be described in detail with reference to FIGS. 1A to 3.
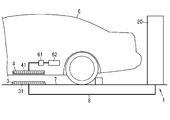
- the non-contact power transmission system 1 of the present embodiment includes a main unit 20 (see FIG. 2), a power feeding unit 3 having a power feeding coil 31, a power receiving unit 4 having a power receiving coil 41, and two And a next control circuit 5.
- the power receiving unit 4 is configured such that output power is supplied from the main unit 20 in a contactless manner.
- the output power is power that is supplied from the power supply coil 31 to the power reception coil 41 in a non-contact manner when an AC voltage is applied from the main unit 20 to the power supply coil 31.
- the vehicle 6 is an electric vehicle that travels using, for example, electrical energy stored in the storage battery 62.
- an electric vehicle that travels by the driving force generated by the electric motor will be described as an example of the electric vehicle. May be.
- the main unit 20 receives electric power supplied from a commercial power supply (system power supply) or a power generation facility such as a solar power generation facility, and supplies output power to the power receiving unit 4 in a contactless manner.
- a commercial power supply system power supply
- a power generation facility such as a solar power generation facility
- the main unit 20 may be supplied with DC power from a DC power source.
- the main unit 20 is a charging stand installed in a parking lot such as a commercial facility, a public facility, or an apartment house.
- the power supply unit 3 is installed on an installation surface 7 such as a parking lot floor or ground.
- the main unit 20 is electrically connected to the power supply unit 3 by a cable 8 wired in the ground.
- the main unit 20 supplies output power to the power receiving unit 4 of the vehicle 6 parked on the power supply unit 3 in a non-contact manner.
- the power receiving coil 41 of the power receiving unit 4 is located above the power feeding coil 31 and is electromagnetically coupled to the power feeding coil 31 (at least one of electric field coupling and magnetic field coupling).
- the power supply coil 31 is not limited to be installed so as to be exposed from the installation surface 7, and may be installed so as to be embedded in the installation surface 7. That is, the power supply unit 3 may be installed so as to be embedded in the installation surface 7.
- the main unit 20 is configured, for example, by housing a primary circuit 21, a primary control circuit 22, and a measurement unit (primary measurement unit) 23 in a housing.
- the primary circuit 21 and the primary control circuit 22 constitute a non-contact power feeding system 2. That is, the non-contact power feeding system 2 of this embodiment includes a primary circuit 21 and a primary control circuit 22.
- the primary circuit 21 includes a PFC (Power Factor Correction) circuit 211 and an inverter circuit 212.
- the PFC circuit 211 converts the AC voltage supplied from the commercial power supply AC ⁇ b> 1 into a DC voltage, and supplies the converted DC voltage to the inverter circuit 212.
- the inverter circuit 212 converts the DC voltage supplied from the PFC circuit 211 into an AC voltage, and supplies the converted AC voltage to the power supply coil 31. That is, the primary circuit 21 receives AC power supplied from the commercial power supply AC ⁇ b> 1 and applies an AC voltage to the power feeding coil 31 in accordance with the control of the primary control circuit 22. In other words, the primary circuit 21 supplies power to the power supply unit 3 (power supply coil 31) in accordance with the control of the primary control circuit 22.
- the measuring unit 23 has a function of measuring the input voltage of the inverter circuit 212 and the input current of the inverter circuit 212. Moreover, the measurement part 23 has a function which calculates electric power based on the measured voltage and electric current. That is, the measuring unit 23 has a function of measuring the power input to the inverter circuit 212. In general, since the power loss due to the PFC circuit 211 is smaller than the power input to the PFC circuit 211, the power input to the PFC circuit 211 is substantially equal to the power input to the inverter circuit 212.
- the measurement unit 23 since the measurement unit 23 has a function of measuring the power input to the inverter circuit 212, the power input to the PFC circuit 211, that is, the power input to the non-contact power feeding system 2 is measured. It can be said that it has the function to do. Moreover, since the measurement part 23 has the function to measure the electric power input into the non-contact electric power feeding system 2, it has the function to measure the primary electric power which the primary circuit 21 supplies to the feed coil 31 substantially. It can be said that it has. That is, the measurement unit 23 can be said to be a primary measurement unit that measures primary power. Note that the function of measuring the primary power can be realized by a known technique, and thus the description thereof is omitted here.
- the measured value of the primary power is given to the primary control circuit 22. That is, the primary control circuit 22 is configured to acquire a measured value of primary power.
- the “measured value of primary power” is simply referred to as “primary measured value”.
- the measurement unit 23 is provided separately from the primary control circuit 22, but may be included in the primary control circuit 22.
- the primary control circuit 22 includes, for example, a microcomputer as a main component.
- the microcomputer realizes a function as the primary control circuit 22 by executing a program recorded in the memory by a CPU (Central Processing Unit).
- the program may be recorded in advance in a memory of a microcomputer, may be provided by being recorded on a recording medium such as a memory card, or may be provided through an electric communication line.
- the primary control circuit 22 is configured to control the primary circuit 21. Specifically, the primary control circuit 22 controls the primary circuit 21 so that an AC voltage is applied to the power feeding coil 31, thereby feeding power from the power feeding coil 31 to the power receiving coil 41 in a non-contact manner. That is, the primary control circuit 22 controls power feeding from the power feeding coil 31 provided on the primary side to the power receiving coil 41 provided on the secondary side and electromagnetically coupled to the power feeding coil 31.
- the primary control circuit 22 is configured to repeatedly execute the power control process and the update process alternately.
- the power control process is a process of controlling the primary circuit 21 so that the primary measurement value matches the primary target value that is the primary power target value.
- the update process is a process for updating the primary target value. That is, the primary control circuit 22 is configured to feedback control the primary power while periodically updating the primary target value.
- the primary control circuit 22 includes a communication unit 221.
- the communication unit 221 uses, for example, a communication standard such as a wireless LAN (Local Area Network) or Bluetooth (registered trademark) with Wi-Fi (registered trademark) authentication, and a communication unit 51 of the secondary control circuit 5 described later. Are configured to perform wireless communication.
- the communication between the communication unit 221 and the communication unit 51 may be wireless communication using a communication standard other than the above.
- the power supply unit 3 includes a power supply coil 31 and a pair of capacitors 32 and 33 as shown in FIG. 1A.
- the power feeding coil 31 is a so-called circular (spiral type) coil configured by winding a conducting wire in a spiral shape in a plan view, for example.
- the feeding coil 31 constitutes a resonance circuit together with a pair of capacitors 32 and 33.
- the power receiving unit 4 includes a power receiving coil 41 that is electromagnetically coupled to the power feeding coil 31, a pair of capacitors 42 and 43, a rectifying and smoothing circuit 44, and a measuring unit (secondary measuring unit) 45.
- a charging device 61 and a storage battery 62 are electrically connected to the output end of the power receiving unit 4.
- the power receiving coil 41 is, for example, a circular type coil similar to the power feeding coil 31.
- the power receiving coil 41 constitutes a resonance circuit together with a pair of capacitors 42 and 43.
- the rectifying / smoothing circuit 44 rectifies and smoothes the AC voltage generated between both ends of the power receiving coil 41.
- the rectifying / smoothing circuit 44 outputs a DC voltage obtained by rectification / smoothing to the charging device 61 and the storage battery 62.
- the measuring unit 45 has a function of measuring the output voltage of the rectifying / smoothing circuit 44 and the output current of the rectifying / smoothing circuit 44. Moreover, the measurement part 45 has a function which calculates electric power based on the measured voltage and electric current. That is, the measuring unit 45 has a function of measuring the power output from the rectifying and smoothing circuit 44. In other words, the measurement unit 45 has a function of measuring the power output from the power reception unit 4. Moreover, since the measurement part 45 has the function to measure the electric power which the receiving unit 4 outputs, it can be said that it has the function to measure the secondary electric power which the receiving coil 41 receives substantially. That is, the measurement unit 45 can be said to be a secondary measurement unit that measures secondary power.
- the function of measuring the secondary power can be realized by a known technique, and thus the description thereof is omitted here.
- the measured value of the secondary power is given to the secondary control circuit 5. That is, the secondary control circuit 5 is configured to acquire a measurement value of the secondary power.
- the “measurement value of secondary power” is simply referred to as “secondary measurement value”.
- the secondary control circuit 5 is a control circuit mounted on a vehicle 6 such as an ECU (Electronic Control Unit).
- the secondary control circuit 5 acquires the state of charge (State of Charge: SOC) of the storage battery 62 via the charging device 61 and determines a secondary target value that is a target value of the secondary power. Then, the secondary control circuit 5 transmits the secondary measurement value acquired from the measurement unit 45 and the secondary target value to the primary control circuit 22 via the communication unit 51 and the communication unit 221.
- the primary control circuit 22 is configured to acquire the secondary measurement value and the secondary target value from the secondary control circuit 5.
- the secondary control circuit 5 transmits the secondary measurement value and the secondary target value to the primary control circuit 22 at a predetermined transmission interval.
- the non-contact power transmission system 1 employs a magnetic resonance method (magnetic resonance method) that transmits power by resonating a resonance circuit including the power feeding coil 31 and a resonance circuit including the power receiving coil 41. ing. For this reason, the non-contact power transmission system 1 of the present embodiment can transmit the output power of the main unit 20 to the power receiving unit 4 with high efficiency even when the power feeding coil 31 and the power receiving coil 41 are relatively separated from each other. .
- the transmission method of the output power from the main unit 20 to the power receiving unit 4 is not limited to the magnetic field resonance method, and may be, for example, an electromagnetic induction method, a microwave transmission method, or the like.
- the primary control circuit 22 when receiving a command from the vehicle 6 to instruct the start of power supply, the primary control circuit 22 performs preprocessing for calculating a primary target value (step S11).
- the preprocessing is executed before the execution of the first control process after the power supply from the power supply coil 31 to the power reception coil 41 is started.
- the primary control circuit 22 acquires the secondary target value transmitted from the secondary control circuit 5. Then, the primary control circuit 22 calculates a primary target value based on the secondary target value and the transmission efficiency.
- the transmission efficiency is the ratio of the power (secondary power) received by the power receiving coil 41 to the power (primary power) output from the power feeding coil 31. For example, if the primary power and the secondary power are the same magnitude, the transmission efficiency is 100%. If the secondary power is half the primary power, the transmission efficiency is 50%.
- the primary control circuit 22 calculates the primary target value using the initial value as the transmission efficiency.
- the initial value is a constant preset in the primary control circuit 22.
- the initial value is preferably the maximum value (for example, 95%) allowed by the non-contact power feeding system 2 in the transmission efficiency.
- the initial value is preferably as close as possible to 100%. In this embodiment, it is assumed that the initial value is 100%.
- the primary control circuit 22 executes the control process after executing the pre-process (step S12). That is, the primary control circuit 22 controls the primary circuit 21 so that the primary measurement value matches the primary target value calculated in the preprocessing.
- the control process is executed, electric power starts to be supplied from the power feeding coil 31 to the power receiving coil 41 in a non-contact manner. Then, since the measurement part 45 comes to measure the electric power which the power receiving unit 4 outputs, the secondary control circuit 5 will acquire a secondary measurement value. Therefore, after the first control process after the start of power supply, the primary control circuit 22 acquires a secondary measurement value from the secondary control circuit 5 in addition to the secondary target value.
- the primary control circuit 22 executes the update process after executing the control process.
- the primary control circuit 22 calculates the transmission efficiency using the primary measurement value acquired from the measurement unit 23 and the secondary measurement value acquired from the secondary control circuit 5 (step S13).
- the primary measurement value is “P1” and the secondary measurement value is “P2”
- the primary control circuit 22 calculates a primary target value using the calculated transmission efficiency and the secondary target value acquired from the secondary control circuit 5 (step S14).
- the primary target value calculation method in the update process is the same as the primary target value calculation method in the preprocessing, except that the transmission efficiency is not the initial value but the calculated transmission efficiency. That is, the primary control circuit 22 updates the primary target value by executing the processes of steps S13 and S14.
- the primary control circuit 22 executes the update process and then executes the control process again (step S12). That is, the primary control circuit 22 repeatedly executes the control process (step S12) and the update process (steps S13 and S14) alternately using the updated primary target value.
- the update process is executed using the secondary measurement value and the secondary target value acquired from the secondary control circuit 5. Therefore, the interval for executing the update process depends on the transmission interval of the secondary measurement value and the secondary target value transmitted intermittently from the secondary control circuit 5. In the present embodiment, the interval for executing the update process is, for example, several hundred ms. In this way, the primary control circuit 22 makes the secondary measurement value coincide with the secondary target value by increasing or decreasing the primary power while updating the primary target value according to the secondary target value and the secondary measurement value. To work.
- the primary control circuit 22 monitors changes in the primary measurement values in the control process. When the primary measurement value fluctuates and deviates from a predetermined range (for example, ⁇ 5%) having the primary target value as the median value, the primary control circuit 22 determines that it is abnormal and stops the power supply. The circuit 21 is controlled. Further, the primary control circuit 22 also controls the primary circuit 21 so as to stop the power supply by determining that it is abnormal even when the primary measurement value exceeds the rated power (for example, 3.7 kW).
- a predetermined range for example, ⁇ 5%
- the control process is a process that can be executed without acquiring the secondary measurement value and the secondary target value from the secondary control circuit 5 as in the update process. Therefore, the interval at which the update process is performed depends on the transmission interval of the secondary measurement value and the secondary target value, whereas the interval at which the control process is performed is faster than the update process without depending on the transmission interval.
- Can be The primary control circuit 22 monitors the change in the primary measurement value at an interval shorter than the transmission interval in such a relatively high-speed control process.
- the non-contact electric power feeding system 2 of this embodiment is the fluctuation
- the fluctuation of the coupling coefficient between the power feeding coil 31 and the power receiving coil 41 can occur, for example, when the vehicle 6 moves during power feeding.
- the following problems may occur in the non-contact power supply system (hereinafter referred to as “comparative example non-contact power supply system”) as in the conventional example described in the background art section. It is assumed that the contactless power feeding system of the comparative example is different from the primary control circuit 22 only in the configuration of the primary control circuit, and other configurations are the same as the contactless power feeding system 2 of the present embodiment.
- the primary control circuit performs a correction process of correcting the primary target value based on the difference between the secondary measurement value and the secondary target value in the process of controlling the primary power.
- the relationship between the primary measurement value and the secondary measurement value that is, transmission efficiency
- the transmission efficiency is unknown, there is an index of how much the primary target value should be corrected in order to match the secondary measurement value with the secondary target value. Absent.
- the primary control circuit needs to repeat the above correction process many times in order to make the secondary measurement value coincide with the secondary target value, and the secondary power is supplied to the storage battery 62. There is a problem that it takes time to supply stably.
- the primary control circuit 22 calculates the transmission efficiency using the primary measurement value and the secondary measurement value in the update process, and uses the calculated transmission efficiency as a primary target.
- the value is corrected. That is, in the non-contact power feeding system 2 of the present embodiment, the transmission efficiency is used as an index of how much the primary target value should be corrected in order to make the secondary measurement value coincide with the secondary target value. For this reason, in the non-contact electric power feeding system 2 of this embodiment, it is not necessary to repeat correction
- the vertical axis represents power (unit: “kW”)
- the horizontal axis represents time (unit: “ms”).
- the solid line represents the primary target value
- the alternate long and short dash line represents the secondary target value.
- a white bar graph represents a primary measurement value
- a bar graph hatched with dots represents a secondary measurement value confirmed by the primary control circuit 22.
- the secondary target value is 3 kW.
- the primary control circuit 22 (and the primary control circuit of the comparative example) obtains the secondary power and the secondary target value from the secondary control circuit 5 (and the secondary control circuit of the comparative example) every 500 ms. Have acquired. That is, the primary control circuit 22 and the primary control circuit of the comparative example execute update processing and correction processing every 500 ms.
- the primary control circuit first acquires the secondary measurement value and the secondary target value 500 ms after starting the power supply first.
- the first correction process is executed to increase the primary target value.
- the primary control circuit performs the second acquisition of the secondary measurement value and the secondary target value 1000 ms after the start of power feeding, but since the secondary measurement value has not reached the secondary target value, A second correction process is executed to increase the primary target value.
- a secondary measurement value reaches
- the primary control circuit executes the correction process without calculating the transmission efficiency, so the primary target value must be increased step by step every time the correction process is executed. I don't get it.
- the primary control circuit 22 first acquires the secondary measurement value and the secondary target value 500 ms after starting the power feeding first. Thus, the first update process is executed to increase the primary target value. Next, the primary control circuit 22 performs the second acquisition of the secondary measurement value and the secondary target value 1000 ms after the start of power supply. At this point, the secondary measurement value has already reached the secondary target value. is doing. As described above, in the contactless power feeding system 2 of the present embodiment, the primary control circuit 22 calculates the transmission efficiency and executes the update process, so that the secondary measurement value is obtained only by executing one update process. It is possible to increase to the next target value.
- the time required for the secondary measurement value to reach the secondary target value after the start of power supply is 2000 ms in the non-contact power supply system of the comparative example, whereas in the non-contact state of this embodiment In the contact power supply system 2, it is 1000 ms.
- the non-contact electric power feeding system 2 of this embodiment compared with the non-contact electric power feeding system of a comparative example, since a secondary measured value can be closely approached to a secondary target value, it is secondary to the storage battery 62.
- the time required to stably supply power is short.
- the primary control circuit 22 uses the initial value as the transmission efficiency before the first control process after the power feeding from the power feeding coil 31 to the power receiving coil 41 is started.
- a pre-process for calculating the target value is executed. That is, in the non-contact power feeding system 2 of the present embodiment, the primary control circuit 22 performs preprocessing before repeating the update processing and the control processing alternately.
- the primary target value is the secondary target value at the start of power feeding.
- a secondary measured value can be brought close to a secondary target value more safely.
- the primary control circuit 22 executes the preprocess.
- Embodiment 2 a non-contact power feeding system 2 according to Embodiment 2 of the present invention will be described with reference to FIGS.
- the contactless power supply system 2 of the present embodiment is common to the contactless power supply system 2 of the first embodiment because the primary control circuit 22 is different from the primary control circuit 22 of the contactless power supply system 2 of the first embodiment.
- the description of the configuration to be omitted is omitted.
- the primary control circuit 22 has a predetermined value before the primary target value is updated after the primary measurement value reaches the primary target value. During the period, the primary circuit 21 is controlled so that the primary measurement value becomes the primary target value (a constant magnitude) before the update.
- the process in which the primary control circuit 22 controls the primary circuit 21 so that the primary measurement value has a constant magnitude for a predetermined period is referred to as “constant power control process”.
- the primary control circuit 22 is configured to repeatedly execute a control process, a constant power control process, and an update process in order after executing pre-processing and starting power supply. Yes.
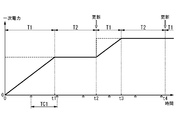
- the vertical axis represents primary power (unit: “kW”, for example), and the horizontal axis represents time (unit: “ms”, for example).
- the solid line represents the primary measurement value
- the broken line represents the primary target value.
- white triangle marks on the horizontal axis represent the timing at which the primary control circuit 22 acquires the secondary measurement value and the secondary target value from the secondary control circuit 5.
- the interval between adjacent triangle marks corresponds to the transmission interval between the secondary measurement value and the secondary target value transmitted intermittently from the secondary control circuit 5.
- this interval is referred to as “transmission interval TC1”.
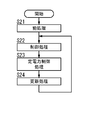
- the primary control circuit 22 executes preprocessing for calculating a primary target value, as in the first embodiment (step S21).
- the primary control circuit 22 executes the control processing as in the first embodiment (step S22).
- the execution period of the control process is referred to as “first period T1”. That is, the primary control circuit 22 controls the primary circuit 21 so that the primary measurement value matches the primary target value calculated in the preprocessing.
- the primary measurement value has reached the primary target value by the control process in the first period T1 from time 0 to time t1.
- the primary control circuit 22 performs secondary control on the secondary measurement value in addition to the secondary target value. Obtained from the circuit 5.
- the primary control circuit 22 executes the constant power control process after executing the control process and before executing the update process (step S23).
- the execution period of the constant power control process is referred to as “second period T2”. That is, before executing the update process, the primary control circuit 22 controls the primary circuit 21 so that the primary measurement value becomes the primary target value before the update for a predetermined period.
- the primary measurement value is maintained at a constant magnitude (primary target value before update) in the second period T2 from time t1 to time t2.
- the second period T2 (that is, the execution period of the constant power control process) is longer than the transmission interval TC1.
- the primary control circuit 22 executes the update process in the same manner as in the first embodiment after executing the constant power control process (step S24).
- the primary target value is updated by the update process.
- the update process is continuously executed at time t2 when the constant power control process ends, and the primary target value is updated to a value larger than before. Since the time required for executing the update process is very short compared to the first period T1 and the second period T2, the execution period of the update process is not shown in FIG.
- the primary control circuit 22 executes the update process and then executes the control process again (step S22). That is, the primary control circuit 22 repeatedly executes the control process (step S22), the constant power control process (step S23), and the update process (step S24) sequentially.
- the control process is executed in the first period T1 from time t2 to time t3, and the constant power control process is executed in the second period T2 from time t3 to time t4. Yes.
- the control process, the constant power control process, and the update process are sequentially repeated after time t4.
- the control process and the constant power are performed. In any of the processes, the primary measurement value is controlled to be constant at the primary target value.
- the primary control circuit 22 monitors changes in the primary measurement value in each of the control process and the constant power control process.
- the primary measurement value fluctuates and deviates from a predetermined range (for example, ⁇ 5%) having the primary target value as the median value
- the primary control circuit 22 determines that it is abnormal and stops the power supply.
- the circuit 21 is controlled. Further, the primary control circuit 22 also controls the primary circuit 21 so as to stop the power supply by determining that it is abnormal even when the primary measurement value exceeds the rated power (for example, 3.7 kW).
- the primary control circuit 22 acquires the primary measurement value, and calculates the transmission efficiency using the acquired primary measurement value and the secondary measurement value transmitted from the secondary control circuit 5.
- the secondary measurement value is transmitted from the secondary control circuit 5 to the primary control circuit 22 at every transmission interval TC1. That is, there is a possibility that the primary control circuit 22 acquires the secondary measurement value with a delay of the transmission interval TC1 at the maximum from the time when the secondary control circuit 5 acquires the secondary measurement value.
- the secondary power used in the update process is acquired at a time before the acquisition time of the primary measurement value. Therefore, in the update process, if the transmission efficiency is calculated using the primary measurement value and the secondary measurement value that are different from each other, the accurate transmission efficiency cannot be calculated. As a result, the accurate primary target value is calculated. It may not be possible.
- the primary control circuit 22 controls the primary circuit 21, for example, as shown in FIG. 6A, the secondary measurement value becomes the secondary target value in a transient period until the secondary measurement value matches the secondary target value. There are cases where it takes time for the secondary power to become stable because it fluctuates without being fixed. In the example shown in FIG.
- the secondary power fluctuates by sequentially executing the control process and the update process from time t10, and the secondary measurement value gradually matches the secondary target value and is stable at time t11.
- the solid line represents the secondary measurement value
- the alternate long and short dash line represents the secondary target value.
- the primary control circuit 22 is configured to execute the constant power control process before executing the update process.
- the constant power control process is a process for controlling the primary circuit 21 so that the primary measurement value has a constant magnitude for a predetermined period.
- the magnitude of the primary measurement value is the same no matter what time the primary measurement value is acquired. For example, in the example shown in FIG. 5, the primary measurement value acquired at time t2 when the update process is executed is equal to the primary measurement value acquired at time t1 prior to time t2.
- the primary control circuit 22 acquires the secondary measurement value from the secondary control circuit 5 during the second period T2, it transmits using the primary measurement value and the secondary measurement value acquired at substantially the same time. It is possible to calculate the efficiency. Even if the secondary measurement value cannot be acquired in the second period T2, the time point at which the primary measurement value is substantially acquired and the time point at which the secondary measurement value is acquired, compared to the case where the constant power control process is not executed. Can be brought close to each other.
- the primary control circuit 22 can easily calculate the accurate transmission efficiency as compared with the case where the constant power control process is not executed, and as a result, calculates the accurate primary target value. Easy to do.
- a secondary measurement value can be made to correspond with a secondary target value rapidly, for example, as shown to FIG. 6B. Therefore, the time until the secondary power becomes stable can be shortened.
- the secondary measurement value coincides with the secondary target value at time t12 before time t11 by sequentially executing the control process, the constant power control process, and the update process from time t10. stable.
- the solid line represents the secondary measurement value
- the alternate long and short dash line represents the secondary target value.
- the primary control circuit 22 is configured to acquire the secondary measurement value from the secondary control circuit 5 in the execution period of the constant power control process (second period T2). Has been. For this reason, in this embodiment, since the primary control circuit 22 can calculate transmission efficiency using the primary measurement value and the secondary measurement value acquired at substantially the same time, it is easy to calculate the correct transmission efficiency.
- the execution period of the constant power control process (second period T2) is longer than the transmission interval TC1 of the secondary power transmitted from the secondary control circuit 5. .
- the primary control circuit 22 can acquire the secondary measurement value at least once in the second period T2.
- the primary control circuit 22 may execute the update process using the latest secondary measurement value among the plurality of secondary measurement values. preferable. Whether or not the primary control circuit 22 is configured to acquire the secondary measurement value in the second period T2 is arbitrary.
- the primary control circuit 22 is configured to execute the constant power control process after executing the control process. For this reason, in the non-contact electric power feeding system 2 of this embodiment, when a primary target value is updated, it is possible to make a primary measured value correspond with a primary target value rapidly. Note that whether or not the primary control circuit 22 executes the constant power control process after the execution of the control process is arbitrary. For example, the primary control circuit 22 may execute a constant power control process before executing the control process.
- the primary control circuit 22 is configured to monitor a change in the primary measurement value during the execution period of the constant power control process (second period T2). For this reason, in the non-contact power feeding system 2 of the present embodiment, even when the constant power control process is executed, the primary power varies due to, for example, load variation or coupling coefficient variation between the feeding coil 31 and the receiving coil 41. , Can respond promptly. Note that whether or not the primary control circuit 22 monitors the change in the primary measurement value during the execution period of the constant power control process is arbitrary.
- the primary control circuit 22 uses the process of calculating the transmission efficiency from the primary measurement value and the secondary measurement value, the transmission efficiency, and the secondary target value in the update process.
- the process of calculating the primary target value is executed, other processes may be executed.
- the primary control circuit 22 performs a process of directly calculating the primary target value from the primary measurement value, the secondary measurement value, and the secondary target value without interposing the process of calculating the transmission efficiency. May be.
- This process is also a process of calculating the primary target value based on the transmission efficiency determined by the primary measurement value and the secondary measurement value and the secondary target value.
- the primary circuit 21 may include a power correction circuit.
- the power correction circuit is provided between the inverter circuit 212 and the capacitor 32 (or the capacitor 33), for example, and is configured to correct the magnitude of the primary power output from the feeding coil 31.
- the power correction circuit includes, for example, a capacitor and a plurality of switch elements.
- the power correction circuit is configured to adjust the charging voltage of the capacitor to the feeding coil 31 by controlling a plurality of switch elements.
- the primary control circuit 22 can feedback control the primary power not only by controlling the PFC circuit 211 and the inverter circuit 212 but also by controlling a plurality of switch elements of the power correction circuit.
- the non-contact power feeding system 2 of the first and second embodiments only needs to include the primary circuit 21 and the primary control circuit 22. That is, the non-contact power feeding system 2 according to the first and second embodiments may not include the power feeding unit 3, and further does not include secondary devices such as the power receiving unit 4 and the secondary control circuit 5. May be.
- the non-contact power feeding system (2) includes a primary circuit (21) and a primary control circuit (22).
- the primary circuit (21) supplies primary power to the feeding coil (31).
- the primary control circuit (22) controls the primary circuit (21).
- the primary control circuit (22) is configured to acquire a primary measurement value that is a measurement value of the primary power.
- the primary control circuit (22) includes a secondary measurement value that is a measurement value of the secondary power received by the power receiving coil (41) that is electromagnetically coupled to the power supply coil (31), and a secondary target that is a target value of the secondary power. Values are obtained from the secondary control circuit (5).
- the primary control circuit (22) is configured to repeatedly and repeatedly execute a control process and an update process.
- the control process is a process of controlling the primary circuit (21) so that the primary measurement value matches the primary target value that is the target value of the primary power.
- the update process is a process for updating the primary target value.
- the update process includes a process of calculating the primary target value based on the transmission efficiency determined by the primary measurement value and the secondary measurement value and the secondary target value.
- the primary control circuit (22) starts power feeding from the power feeding coil (31) to the power receiving coil (41).
- the preprocess is executed.
- the preprocessing is processing for calculating the primary target value using the initial value as the transmission efficiency.
- the primary control circuit (22) performs the constant power control process before executing the update process. Is configured to run.
- the constant power control process is a process of controlling the primary circuit (21) so that the primary measurement value has a constant magnitude for a predetermined period.
- a primary control circuit (22) is a secondary control circuit (5) in the execution period of a constant power control process. Is configured to obtain a secondary measurement value.
- the execution period of a constant power control process is 2 transmitted intermittently from a secondary control circuit (5). It is longer than the transmission interval (TC1) of the next measurement value.
- the primary control circuit (22) performs the constant power control after executing the control process. It is configured to perform processing.
- the primary control circuit (22) performs the primary control during the constant power control processing execution period. It is configured to monitor changes in measurement values.
- the contactless power feeding system (2) further includes a primary measurement unit (23) that measures primary power in any of the first to seventh aspects.
- the primary control circuit (22) is configured to acquire a primary measurement value from the primary measurement unit (23).
- the contactless power transmission system (1) includes a contactless power feeding system (2) according to any one of the first to eighth aspects, a power feeding coil (31), and a power receiving coil. (41) and a secondary control circuit (5).
- Primary power is supplied to the feeding coil (31).
- the power receiving coil (41) is electromagnetically coupled to the power feeding coil (31).
- the secondary control circuit (5) is configured to acquire a secondary measurement value that is a measurement value of the secondary power supplied to the power receiving coil (41).
- the secondary control circuit (5) is configured to transmit the secondary measurement value and the secondary target value, which is the target value of the secondary power, to the primary control circuit (22).
- the non-contact power transmission system (1) further includes a secondary measurement unit 45 for measuring secondary power in the ninth aspect.
- the secondary control circuit (5) is configured to acquire a secondary measurement value from the secondary measurement unit (45).
- the non-contact power feeding system (2) and the non-contact power transmission system (1) can easily bring the secondary measurement value close to the secondary target value quickly.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Computer Networks & Wireless Communication (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
- Current-Collector Devices For Electrically Propelled Vehicles (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
本発明の課題は、二次電力を速やかに二次目標値に近づけることにある。非接触給電システム(2)は、給電コイル(31)に一次電力を供給する一次回路(21)と、一次回路(21)を制御する一次制御回路(22)とを備える。一次制御回路(22)は、受電コイル(41)が受ける二次電力の二次計測値と、二次目標値とを二次制御回路(5)から取得する。一次制御回路(22)は、制御処理と、更新処理とを交互に繰り返し実行する。制御処理は、一次目標値に一次計測値が一致するように一次回路(21)を制御する処理である。更新処理は、一次目標値を更新する処理である。そして、更新処理は、一次計測値及び二次計測値で定まる伝達効率と、二次目標値とに基づいて一次目標値を算出する処理を含む。
Description
本発明は、一般に非接触給電システム及び非接触電力伝送システムに関し、より詳細には、給電対象に非接触で電力の伝送を行う非接触給電システム及び非接触電力伝送システムに関する。
従来、受電側装置に対して非接触で電力を供給可能な給電装置が知られており、たとえば特許文献1に開示されている。この給電装置は、送電部と、第1取得手段と、制御手段と、第2取得手段と、補正手段とを備える。
送電部は、受電側装置の受電部と空間を隔てて対向配置される。第1取得手段は、送電部に供給される電力に係る第1特性値を、第1周期で取得する。制御手段は、第1特性値に基づいて、送電部に供給される電力が第1指令値に近づくように電力を制御する。第2取得手段は、受電側装置から送信される第2指令値と、受電部で受電された電力に係る第2特性値とを、第2周期ごとに取得する。そして、補正手段は、第2指令値及び第2特性値に基づいて、第1指令値を補正する。
しかしながら、上記従来例では、第2指令値(二次目標値)及び第2特性値(二次計測値)のみに基づいて第1指令値(一次目標値)を補正している。このため、従来例では、二次計測値を速やかに二次目標値に近づけ難いという問題があった。
本発明は、上記の点に鑑みてなされており、二次計測値を速やかに二次目標値に近づけ易い非接触給電システム及び非接触電力伝送システムを提供することを目的とする。
本発明の一態様に係る非接触給電システムは、一次回路と、一次制御回路とを備える。前記一次回路は、給電コイルに一次電力を供給する。前記一次制御回路は、前記一次回路を制御する。前記一次制御回路は、前記一次電力の計測値である一次計測値を取得するように構成される。前記一次制御回路は、前記給電コイルに電磁結合される受電コイルが受ける二次電力の計測値である二次計測値と、前記二次電力の目標値である二次目標値とを二次制御回路から取得するように構成される。前記一次制御回路は、制御処理と、更新処理とを交互に繰り返し実行するように構成される。前記制御処理は、前記一次電力の目標値である一次目標値に前記一次計測値が一致するように前記一次回路を制御する処理である。前記更新処理は、前記一次目標値を更新する処理である。前記更新処理は、前記一次計測値及び前記二次計測値で定まる伝達効率と、前記二次目標値とに基づいて前記一次目標値を算出する処理を含む。
本発明の一態様に係る非接触電力伝送システムは、上記の非接触給電システムと、給電コイルと、受電コイルと、二次制御回路とを備える。前記給電コイルは、前記一次電力が供給される。前記受電コイルは、前記給電コイルに電磁結合される。前記二次制御回路は、前記受電コイルに供給される二次電力の計測値である二次計測値を取得するように構成される。前記二次制御回路は、前記二次計測値と、前記二次電力の目標値である二次目標値とを前記一次制御回路に送信するように構成されている。
以下、本発明の実施形態1,2に係る非接触給電システム及び非接触電力伝送システムについて説明する。ただし、以下に説明する構成は、本発明の一例に過ぎず、本発明は、下記の構成に限定されることはなく、下記の構成以外であっても、本発明に係る技術的思想を逸脱しない範囲であれば、設計等に応じて種々の変更が可能である。
(実施形態1)
本発明の実施形態1に係る非接触給電システム2は、図1Aに示すように、一次回路21と、一次制御回路22とを備えている。一次回路21は、給電コイル31に一次電力を供給する。一次制御回路22は、一次回路21を制御する。一次制御回路22は、一次電力の計測値である一次計測値を取得するように構成されている。一次制御回路22は、給電コイル31に電磁結合される受電コイル41が受ける二次電力の計測値である二次計測値と、二次電力の目標値である二次目標値とを二次制御回路5から取得するように構成されている。
本発明の実施形態1に係る非接触給電システム2は、図1Aに示すように、一次回路21と、一次制御回路22とを備えている。一次回路21は、給電コイル31に一次電力を供給する。一次制御回路22は、一次回路21を制御する。一次制御回路22は、一次電力の計測値である一次計測値を取得するように構成されている。一次制御回路22は、給電コイル31に電磁結合される受電コイル41が受ける二次電力の計測値である二次計測値と、二次電力の目標値である二次目標値とを二次制御回路5から取得するように構成されている。
図1Bに示すように、一次制御回路22は、制御処理と、更新処理とを交互に繰り返し実行するように構成されている。制御処理は、一次電力の目標値である一次目標値に一次計測値が一致するように一次回路21を制御する処理である。更新処理は、一次目標値を更新する処理である。そして、更新処理は、一次計測値及び二次計測値で定まる伝達効率と、二次目標値とに基づいて一次目標値を算出する処理を含んでいる。
また、本実施形態の非接触電力伝送システム1は、図1Aに示すように、非接触給電システム2と、給電コイル31と、受電コイル41と、二次制御回路5とを備えている。給電コイル31には、一次電力が供給される。受電コイル41は、給電コイル31に電磁結合される。二次制御回路5は、受電コイル41に供給される二次電力の計測値である二次計測値を取得するように構成されている。そして、二次制御回路5は、二次計測値と、二次電力の目標値である二次目標値とを一次制御回路22に送信するように構成されている。
以下、本実施形態の非接触給電システム2及び非接触電力伝送システム1について図1A~図3を用いて詳細に説明する。本実施形態の非接触電力伝送システム1は、図1Aに示すように、本体ユニット20(図2参照)と、給電コイル31を有する給電ユニット3と、受電コイル41を有する受電ユニット4と、二次制御回路5とを備えている。受電ユニット4は、本体ユニット20から非接触で出力電力が供給されるように構成されている。出力電力は、本体ユニット20から給電コイル31に交流電圧が印加されることにより、給電コイル31から受電コイル41に非接触で供給される電力である。
本実施形態では、受電ユニット4が車両6に搭載されている場合を例に説明する。また、車両6に搭載されている充電装置61及び蓄電池(バッテリ)62が負荷である場合を例にして説明する。ここで、車両6は、たとえば蓄電池62に蓄積された電気エネルギーを用いて走行する電動車両である。なお、ここでは、電動機で生じる駆動力によって走行する電気自動車を電動車両の例として説明するが、電動車両は電気自動車に限らず、たとえばハイブリッド電気自動車や二輪車(電動バイク)、電動自転車などであってもよい。
本体ユニット20は、商用電源(系統電源)や、太陽光発電設備などの発電設備から供給される電力を受けて、出力電力を受電ユニット4に非接触で供給する。本実施形態では、本体ユニット20に商用電源AC1から交流電力が供給される場合を例に説明する。なお、本体ユニット20には、直流電源から直流電力が供給されてもよい。
本体ユニット20は、たとえば商業施設や公共施設、あるいは集合住宅などの駐車場に設置される充電スタンドである。給電ユニット3は、駐車場の床あるいは地面などの設置面7に設置される。また、本体ユニット20は、地中に配線されたケーブル8により、給電ユニット3に電気的に接続されている。
本体ユニット20は、給電ユニット3上に駐車された車両6の受電ユニット4に対して非接触で出力電力を供給する。このとき、受電ユニット4の受電コイル41は、給電コイル31の上方に位置することで、給電コイル31と電磁結合(電界結合と磁界結合との少なくとも一方)されている。なお、給電コイル31は、設置面7から露出するように設置される構成に限らず、設置面7に埋め込まれるように設置されていてもよい。つまり、給電ユニット3は、設置面7に埋め込まれるように設置されていてもよい。
本体ユニット20は、図1Aに示すように、たとえば筐体に、一次回路21と、一次制御回路22と、計測部(一次計測部)23とを収納して構成されている。一次回路21と一次制御回路22とは、非接触給電システム2を構成している。つまり、本実施形態の非接触給電システム2は、一次回路21と、一次制御回路22とを備えている。
一次回路21は、PFC(Power Factor Correction)回路211と、インバータ回路212とを備えて構成されている。PFC回路211は、商用電源AC1から供給される交流電圧を直流電圧に変換し、変換した直流電圧をインバータ回路212に供給する。インバータ回路212は、PFC回路211から供給される直流電圧を交流電圧に変換し、変換した交流電圧を給電コイル31に供給する。つまり、一次回路21は、商用電源AC1から供給される交流電力を受けて、一次制御回路22の制御に応じて、給電コイル31に交流電圧を印加する。言い換えれば、一次回路21は、一次制御回路22の制御に応じて、給電ユニット3(給電コイル31)に電力を供給する。
計測部23は、インバータ回路212の入力電圧と、インバータ回路212の入力電流とを計測する機能を有している。また、計測部23は、計測した電圧及び電流に基づいて電力を演算する機能を有している。つまり、計測部23は、インバータ回路212に入力される電力を計測する機能を有している。そして、通常、PFC回路211による電力損失は、PFC回路211に入力される電力に比べて小さいので、PFC回路211に入力される電力は、インバータ回路212に入力される電力と略等しい。このため、計測部23は、インバータ回路212に入力される電力を計測する機能を有していることから、PFC回路211に入力される電力、つまり非接触給電システム2に入力される電力を計測する機能を有しているといえる。また、計測部23は、非接触給電システム2に入力される電力を計測する機能を有していることから、実質的に、一次回路21が給電コイル31に供給する一次電力を計測する機能を有しているといえる。つまり、計測部23は、一次電力を計測する一次計測部といえる。なお、一次電力を計測する機能は、既知の技術で実現可能であるため、ここでは説明を省略する。一次電力の計測値は、一次制御回路22に与えられる。つまり、一次制御回路22は、一次電力の計測値を取得するように構成されている。以下では、「一次電力の計測値」を単に「一次計測値」という。なお、本実施形態では、計測部23は一次制御回路22と別体に設けられているが、一次制御回路22に含まれていてもよい。
一次制御回路22は、たとえばマイコン(マイクロコンピュータ)を主構成として備えている。マイコンは、そのメモリに記録されているプログラムをCPU(Central Processing Unit)で実行することにより、一次制御回路22としての機能を実現する。プログラムは、予めマイコンのメモリに記録されていてもよいし、メモリカードのような記録媒体に記録されて提供されたり、電気通信回線を通して提供されたりしてもよい。
一次制御回路22は、一次回路21を制御するように構成されている。具体的には、一次制御回路22は、給電コイル31に交流電圧が印加されるように一次回路21を制御することで、給電コイル31から受電コイル41に非接触で給電させる。つまり、一次制御回路22は、一次側に設けられた給電コイル31から、二次側に設けられて給電コイル31に電磁結合される受電コイル41への給電を制御する。
本実施形態では、一次制御回路22は、電力制御処理と、更新処理とを交互に繰り返し実行するように構成されている。電力制御処理は、一次電力の目標値である一次目標値に、一次計測値が一致するように一次回路21を制御する処理である。更新処理は、一次目標値を更新する処理である。つまり、一次制御回路22は、一次目標値を定期的に更新しながら、一次電力をフィードバック制御するように構成されている。
また、一次制御回路22は、通信部221を備えている。通信部221は、たとえばWi-Fi(登録商標)認証を得た無線LAN(Local Area Network)やBluetooth(登録商標)などの通信規格を用いて、後述する二次制御回路5の通信部51との間で無線通信を行うように構成されている。通信部221と通信部51との間の通信は、上記以外の通信規格を用いた無線通信であってもよい。
給電ユニット3は、図1Aに示すように、給電コイル31と、一対のコンデンサ32,33とを備えている。給電コイル31は、たとえば平面視において導線が渦巻き状に巻かれて構成される、いわゆるサーキュラー型(スパイラル型)のコイルである。給電コイル31は、一対のコンデンサ32,33と共に共振回路を構成している。
受電ユニット4は、図1Aに示すように、給電コイル31に電磁結合される受電コイル41と、一対のコンデンサ42,43と、整流平滑回路44と、計測部(二次計測部)45とを備えている。受電ユニット4の出力端には、充電装置61及び蓄電池62が電気的に接続されている。受電コイル41は、たとえば給電コイル31と同様にサーキュラー型のコイルである。受電コイル41は、一対のコンデンサ42,43と共に共振回路を構成している。整流平滑回路44は、受電コイル41の両端間に発生する交流電圧を整流・平滑する。そして、整流平滑回路44は、整流・平滑により得られる直流電圧を充電装置61及び蓄電池62に出力する。
計測部45は、整流平滑回路44の出力電圧と、整流平滑回路44の出力電流とを計測する機能を有している。また、計測部45は、計測した電圧及び電流に基づいて電力を演算する機能を有している。つまり、計測部45は、整流平滑回路44から出力される電力を計測する機能を有している。言い換えれば、計測部45は、受電ユニット4が出力する電力を計測する機能を有している。また、計測部45は、受電ユニット4が出力する電力を計測する機能を有していることから、実質的に、受電コイル41の受ける二次電力を計測する機能を有しているといえる。つまり、計測部45は、二次電力を計測する二次計測部といえる。なお、二次電力を計測する機能は、既知の技術で実現可能であるため、ここでは説明を省略する。二次電力の計測値は、二次制御回路5に与えられる。つまり、二次制御回路5は、二次電力の計測値を取得するように構成されている。以下では、「二次電力の計測値」を単に「二次計測値」という。
二次制御回路5は、たとえばECU(Electronic Control Unit)等の車両6に搭載された制御回路である。二次制御回路5は、充電装置61を介して蓄電池62の充電状態(State of Charge:SOC)を取得し、二次電力の目標値である二次目標値を決定する。そして、二次制御回路5は、計測部45から取得した二次計測値、及び二次目標値を通信部51、通信部221を介して一次制御回路22に送信する。言い換えれば、一次制御回路22は、二次計測値及び二次目標値を二次制御回路5から取得するように構成されている。本実施形態では、二次制御回路5は、所定の送信間隔で、二次計測値及び二次目標値を一次制御回路22に送信する。
本実施形態の非接触電力伝送システム1は、給電コイル31を含む共振回路と、受電コイル41を含む共振回路とを共鳴させることにより電力の伝送を行う磁界共鳴方式(磁気共鳴方式)を採用している。このため、本実施形態の非接触電力伝送システム1は、給電コイル31と受電コイル41が比較的離れた状態でも、本体ユニット20の出力電力を受電ユニット4に対して高効率で伝送可能である。本体ユニット20から受電ユニット4への出力電力の伝送方式は、磁界共鳴方式に限らず、たとえば電磁誘導方式、マイクロ波伝送方式などであってもよい。
<動作>
以下、本実施形態の非接触給電システム2の動作について図1Bを用いて説明する。まず、一次制御回路22は、給電の開始を指示する指令を車両6から受けたときに、一次目標値を算出する前処理を実行する(ステップS11)。前処理は、給電コイル31から受電コイル41への給電を開始した後の最初の制御処理の実行前に実行される。前処理において、一次制御回路22は、二次制御回路5から送信される二次目標値を取得する。そして、一次制御回路22は、二次目標値及び伝達効率に基づいて、一次目標値を算出する。
以下、本実施形態の非接触給電システム2の動作について図1Bを用いて説明する。まず、一次制御回路22は、給電の開始を指示する指令を車両6から受けたときに、一次目標値を算出する前処理を実行する(ステップS11)。前処理は、給電コイル31から受電コイル41への給電を開始した後の最初の制御処理の実行前に実行される。前処理において、一次制御回路22は、二次制御回路5から送信される二次目標値を取得する。そして、一次制御回路22は、二次目標値及び伝達効率に基づいて、一次目標値を算出する。
ここで、伝達効率は、給電コイル31が出力する電力(一次電力)に対する受電コイル41の受ける電力(二次電力)の比率である。たとえば、一次電力と二次電力とが同じ大きさであれば、伝達効率は100%である。また、二次電力の大きさが一次電力の大きさの半分であれば、伝達効率は50%である。
一次目標値を「CP1」、二次目標値を「CP2」、伝達効率を「η」とすると、一次目標値は、二次目標値及び伝達効率を用いて、「CP1=CP2/η」で表される。前処理においては、一次制御回路22は、初期値を伝達効率として一次目標値を算出する。初期値は、一次制御回路22に予め設定されている定数である。初期値は、伝達効率のうち非接触給電システム2が許容する最大値(たとえば、95%)であるのが好ましい。さらには、初期値は100%に極力近い値であるのが好ましい。本実施形態では、初期値が100%であると仮定する。
一次制御回路22は、前処理を実行した後に、制御処理を実行する(ステップS12)。つまり、一次制御回路22は、一次計測値が、前処理において算出した一次目標値に一致するように、一次回路21を制御する。制御処理が実行されると、給電コイル31から受電コイル41へと非接触で電力が供給され始める。すると、計測部45が、受電ユニット4の出力する電力を計測するようになることから、二次制御回路5は、二次計測値を取得するようになる。したがって、給電を開始した後の最初の制御処理以降では、一次制御回路22は、二次目標値に加えて二次計測値を二次制御回路5から取得するようになる。
一次制御回路22は、制御処理を実行した後に、更新処理を実行する。まず、一次制御回路22は、計測部23から取得した一次計測値と、二次制御回路5から取得した二次計測値とを用いて伝達効率を算出する(ステップS13)。一次計測値を「P1」、二次計測値を「P2」とすると、伝達効率は、一次計測値及び二次計測値を用いて、「η=P2/P1」で表される。次に、一次制御回路22は、算出した伝達効率と、二次制御回路5から取得した二次目標値とを用いて、一次目標値を算出する(ステップS14)。更新処理における一次目標値の算出方法は、伝達効率が初期値ではなく算出した伝達効率である点を除き、前処理における一次目標値の算出方法と同様である。つまり、一次制御回路22は、ステップS13,S14の処理を実行することにより、一次目標値を更新する。
そして、一次制御回路22は、更新処理を実行した後に、制御処理を再度実行する(ステップS12)。つまり、一次制御回路22は、更新後の一次目標値を用いて、制御処理(ステップS12)と、更新処理(ステップS13,S14)とを交互に繰り返し実行する。更新処理は、二次制御回路5から取得した二次計測値及び二次目標値を用いて実行される。したがって、更新処理を実行する間隔は、二次制御回路5から間欠的に送信される二次計測値及び二次目標値の送信間隔に依拠する。本実施形態では、更新処理を実行する間隔は、たとえば数百msである。このようにして、一次制御回路22は、二次目標値及び二次計測値に応じて一次目標値を更新しながら一次電力を増減させることにより、二次計測値を二次目標値に一致させるように動作する。
また、本実施形態では、一次制御回路22は、制御処理において一次計測値の変化を監視している。そして、一次制御回路22は、一次計測値が変動して一次目標値を中央値とする所定の範囲(たとえば、±5%)から逸脱した場合、異常と判断して給電を停止するように一次回路21を制御する。また、一次制御回路22は、一次計測値が定格電力(たとえば、3.7kW)を上回る場合も、異常と判断して給電を停止するように一次回路21を制御する。
制御処理は、更新処理のように二次計測値及び二次目標値を二次制御回路5から取得せずとも実行可能な処理である。したがって、更新処理を実行する間隔が二次計測値及び二次目標値の送信間隔に依拠するのに対して、制御処理を実行する間隔は、送信間隔に依拠せずに、更新処理よりも高速化できる。そして、一次制御回路22は、このような比較的高速な制御処理において、送信間隔よりも短い間隔で一次計測値の変化を監視している。このため、本実施形態の非接触給電システム2は、たとえば負荷(ここでは、充電装置61及び蓄電池62)の変動や、給電コイル31と受電コイル41との結合係数の変動などによる一次電力の変動に、速やかに対応することができる。給電コイル31と受電コイル41との結合係数の変動は、たとえば給電中において車両6が移動した場合に起こり得る。
ここで、背景技術の欄で説明した従来例のような非接触給電システム(以下、「比較例の非接触給電システム」という)では、以下のような問題が生じ得る。なお、比較例の非接触給電システムは、一次制御回路の構成が一次制御回路22と異なるだけであり、他の構成は本実施形態の非接触給電システム2と同じ構成であると仮定する。
比較例の非接触給電システムでは、一次制御回路は、一次電力を制御する処理において、二次計測値と二次目標値との差分に基づいて一次目標値を補正する補正処理を行う。しかしながら、補正処理においては、一次計測値と二次計測値との関係(つまり、伝達効率)が考慮されていない。このため、比較例の非接触給電システムでは、伝達効率が不明であることから、二次計測値を二次目標値に一致させるために一次目標値をどの程度補正すべきかの指標が存在していない。したがって、比較例の非接触給電システムでは、一次制御回路は、二次計測値を二次目標値に一致させるために上記の補正処理を何度も繰り返す必要があり、蓄電池62に二次電力を安定的に供給するまでに時間を要するという問題がある。
そこで、本実施形態の非接触給電システム2では、一次制御回路22は、更新処理において、一次計測値と二次計測値とを用いて伝達効率を算出し、算出した伝達効率を用いて一次目標値を補正している。つまり、本実施形態の非接触給電システム2では、二次計測値を二次目標値に一致させるために一次目標値をどの程度補正すべきかの指標として、伝達効率を用いている。このため、本実施形態の非接触給電システム2では、比較例の非接触給電システムのように何度も補正処理を繰り返す必要がなく、蓄電池62に二次電力を安定的に供給するまでに要する時間が短い。つまり、本実施形態の非接触給電システム2では、二次計測値を速やかに二次目標値に近づけ易い。
以下、本実施形態の非接触給電システム2と、比較例の非接触給電システムとの動作の差異について、図3A、図3Bに示す具体例を挙げて説明する。図3A、図3Bの各々において、縦軸は電力(単位は「kW」)、横軸は時間(単位は「ms」)を表している。また、図3A、図3Bの各々において、実線は一次目標値、一点鎖線は二次目標値を表している。さらに、図3A、図3Bの各々において、白抜きの棒グラフは一次計測値を、ドットでハッチングされた棒グラフは、一次制御回路22にて確認される二次計測値を表している。
この具体例では、二次目標値は3kWである。また、この具体例では、一次制御回路22(及び比較例の一次制御回路)は、500msごとに二次制御回路5(及び比較例の二次制御回路)から二次電力及び二次目標値を取得している。つまり、一次制御回路22及び比較例の一次制御回路は、それぞれ500msごとに更新処理及び補正処理を実行している。
比較例の非接触給電システムでは、一次制御回路は、図3Bに示すように、まず給電を開始してから500ms後に二次計測値及び二次目標値の1回目の取得を行うことで、1回目の補正処理を実行して一次目標値を増大させる。次に、一次制御回路は、給電を開始してから1000ms後に二次計測値及び二次目標値の2回目の取得を行うが、二次計測値が二次目標値に到達していないため、2回目の補正処理を実行して一次目標値を増大させる。そして、比較例の非接触給電システムでは、3回目の補正処理の実行後に、漸く二次計測値が二次目標値に到達する。このように、比較例の非接触給電システムでは、一次制御回路が伝達効率を算出せずに補正処理を実行するために、補正処理を実行するごとに一次目標値を段階的に増大せざるを得ない。
本実施形態の非接触給電システム2では、一次制御回路22は、図3Aに示すように、まず給電を開始してから500ms後に二次計測値及び二次目標値の1回目の取得を行うことで、1回目の更新処理を実行して一次目標値を増大させる。次に、一次制御回路22は、給電を開始してから1000ms後に二次計測値及び二次目標値の2回目の取得を行うが、この時点で既に二次計測値が二次目標値に到達している。このように、本実施形態の非接触給電システム2では、一次制御回路22が伝達効率を算出して更新処理を実行するために、1回の更新処理を実行するだけで二次計測値を二次目標値まで増大させることが可能である。
上記具体例において、給電を開始してから二次計測値が二次目標値に到達するまでに要する時間は、比較例の非接触給電システムでは2000msであるのに対して、本実施形態の非接触給電システム2では1000msである。このように、本実施形態の非接触給電システム2では、比較例の非接触給電システムと比較して、二次計測値を速やかに二次目標値に近づけることができるので、蓄電池62に二次電力を安定的に供給するまでに要する時間が短い。
また、本実施形態の非接触給電システム2では、一次制御回路22は、給電コイル31から受電コイル41への給電を開始した後の最初の制御処理の実行前において、初期値を伝達効率として一次目標値を算出する前処理を実行するように構成されている。つまり、本実施形態の非接触給電システム2では、一次制御回路22は、更新処理と制御処理とを交互に繰り返す前に、前処理を実行している。図3Aに示す具体例では、一次制御回路22が初期値を伝達効率(100%)として前処理を実行しているため、給電の開始時点で一次目標値が二次目標値となっている。このため、本実施形態の非接触給電システム2では、前処理を実行しない場合と比較して、より安全に二次計測値を二次目標値に近づけることができる。なお、給電開始後の最初の制御処理において、一次制御回路22が前処理を実行するか否かは任意である。
(実施形態2)
以下、本発明の実施形態2に係る非接触給電システム2について図4~図6を用いて説明する。ただし、本実施形態の非接触給電システム2は、一次制御回路22が実施形態1の非接触給電システム2の一次制御回路22と異なるだけであるので、実施形態1の非接触給電システム2と共通する構成については説明を省略する。
以下、本発明の実施形態2に係る非接触給電システム2について図4~図6を用いて説明する。ただし、本実施形態の非接触給電システム2は、一次制御回路22が実施形態1の非接触給電システム2の一次制御回路22と異なるだけであるので、実施形態1の非接触給電システム2と共通する構成については説明を省略する。
本実施形態の非接触給電システム2では、図4、図5に示すように、一次制御回路22は、一次計測値が一次目標値に到達した後、一次目標値を更新する前に、所定の期間、一次計測値が更新前の一次目標値(一定の大きさ)となるように一次回路21を制御している。以下、一次計測値が所定の期間、一定の大きさとなるように一次制御回路22が一次回路21を制御する処理を「定電力制御処理」という。本実施形態の非接触給電システム2では、一次制御回路22は、前処理を実行して給電を開始した後に、制御処理、定電力制御処理、及び更新処理を順次繰り返し実行するように構成されている。
<動作>
以下、本実施形態の非接触給電システム2の動作について図4、図5を用いて説明する。図5において、縦軸は一次電力(単位は、たとえば「kW」)、横軸は時間(単位は、たとえば「ms」)を表している。また、図5において、実線は一次計測値、破線は一次目標値を表している。さらに、図5において、横軸に記している白抜きの三角印は、一次制御回路22が二次制御回路5から二次計測値及び二次目標値を取得するタイミングを表している。図5において、隣り合う三角印の間隔は、二次制御回路5から間欠的に送信される二次計測値及び二次目標値の送信間隔に相当する。以下では、この間隔を「送信間隔TC1」という。
以下、本実施形態の非接触給電システム2の動作について図4、図5を用いて説明する。図5において、縦軸は一次電力(単位は、たとえば「kW」)、横軸は時間(単位は、たとえば「ms」)を表している。また、図5において、実線は一次計測値、破線は一次目標値を表している。さらに、図5において、横軸に記している白抜きの三角印は、一次制御回路22が二次制御回路5から二次計測値及び二次目標値を取得するタイミングを表している。図5において、隣り合う三角印の間隔は、二次制御回路5から間欠的に送信される二次計測値及び二次目標値の送信間隔に相当する。以下では、この間隔を「送信間隔TC1」という。
まず、一次制御回路22は、給電の開始を指示する指令を車両6から受けたときに、実施形態1と同様に、一次目標値を算出する前処理を実行する(ステップS21)。次に、一次制御回路22は、前処理を実行した後に、実施形態1と同様に制御処理を実行する(ステップS22)。以下では、制御処理の実行期間を「第1期間T1」という。つまり、一次制御回路22は、一次計測値が、前処理において算出した一次目標値に一致するように、一次回路21を制御する。図5に示す例では、時刻0から時刻t1までの第1期間T1における制御処理により、一次計測値が一次目標値に到達している。
そして、制御処理が実行されると、給電コイル31から受電コイル41へと非接触で電力が供給され始めるので、一次制御回路22は、二次目標値に加えて二次計測値を二次制御回路5から取得するようになる。
一次制御回路22は、制御処理を実行した後、更新処理を実行する前に、定電力制御処理を実行する(ステップS23)。以下で、定電力制御処理の実行期間を「第2期間T2」という。つまり、一次制御回路22は、更新処理を実行する前に、所定期間、一次計測値が更新前の一次目標値となるように一次回路21を制御する。図5に示す例では、時刻t1から時刻t2までの第2期間T2において、一次計測値が一定の大きさ(更新前の一次目標値)に維持されている。本実施形態では、第2期間T2(つまり、定電力制御処理の実行期間)は、送信間隔TC1よりも長くなっている。
一次制御回路22は、定電力制御処理を実行した後に、実施形態1と同様に更新処理を実行する(ステップS24)。更新処理により、一次目標値が更新される。図5に示す例では、定電力制御処理が終了する時刻t2において、引き続き更新処理が実行され、一次目標値が従前よりも大きい値に更新されている。なお、更新処理の実行に要する時間は、第1期間T1や第2期間T2と比較して非常に短いため、図5では更新処理の実行期間の図示を省略している。
そして、一次制御回路22は、更新処理を実行した後に、制御処理を再度実行する(ステップS22)。つまり、一次制御回路22は、制御処理(ステップS22)と、定電力制御処理(ステップS23)と、更新処理(ステップS24)とを順次繰り返し実行する。図5に示す例では、更新処理の後、時刻t2から時刻t3までの第1期間T1で制御処理が実行され、時刻t3から時刻t4までの第2期間T2で定電力制御処理が実行されている。図5に示す例では、時刻t4以降も制御処理、定電力制御処理、及び更新処理が順次繰り返されるが、既に二次計測値が二次目標値に到達しているため、制御処理及び定電力処理のいずれにおいても、一次計測値が一次目標値で一定となるように制御されている。
また、本実施形態では、一次制御回路22は、制御処理及び定電力制御処理の各々において一次計測値の変化を監視している。そして、一次制御回路22は、一次計測値が変動して一次目標値を中央値とする所定の範囲(たとえば、±5%)から逸脱した場合、異常と判断して給電を停止するように一次回路21を制御する。また、一次制御回路22は、一次計測値が定格電力(たとえば、3.7kW)を上回る場合も、異常と判断して給電を停止するように一次回路21を制御する。
ここで、本実施形態の非接触給電システム2において、一次制御回路22が定電力制御処理を実行しない場合について説明する。更新処理において、一次制御回路22は、一次計測値を取得し、取得した一次計測値と、二次制御回路5から送信される二次計測値とを用いて伝達効率を算出する。しかしながら、二次計測値は、送信間隔TC1ごとに二次制御回路5から一次制御回路22へ送信される。つまり、一次制御回路22は、二次制御回路5が二次計測値を取得した時点から最大、送信間隔TC1だけ遅れて二次計測値を取得する可能性がある。
このため、更新処理において用いられる二次電力は、一次計測値の取得時点よりも前の時点で取得されている。したがって、更新処理において、取得時点が互いに異なる一次計測値及び二次計測値を用いて伝達効率を算出すると、正確な伝達効率を算出することができず、結果として正確な一次目標値を算出することができない可能性がある。そして、この場合、一次制御回路22が一次回路21を制御すると、たとえば図6Aに示すように、二次計測値が二次目標値に一致するまでの過渡期間において二次計測値が二次目標値に定まらずに変動し、二次電力が安定するまでに時間を要する場合がある。図6Aに示す例では、時刻t10から制御処理及び更新処理を順次実行することで、二次電力が変動し、時刻t11において漸く二次計測値が二次目標値に一致して安定している。なお、図6Aにおいて、実線は二次計測値、一点鎖線は二次目標値を表している。
そこで、本実施形態の非接触給電システム2では、一次制御回路22は、更新処理を実行する前に、定電力制御処理を実行するように構成されている。定電力制御処理は、所定の期間、一次計測値が一定の大きさとなるように一次回路21を制御する処理である。このため、本実施形態では、定電力制御処理を実行する第2期間T2においては、どの時点で一次計測値を取得しても、一次計測値の大きさは同じである。たとえば、図5に示す例では、更新処理を実行する時刻t2で取得した一次計測値は、時刻t2よりも前の時刻t1で取得した一次計測値に等しい。つまり、一次制御回路22は、第2期間T2の間に二次制御回路5から二次計測値を取得すれば、実質的に同じ時点で取得した一次計測値及び二次計測値を用いて伝達効率を算出することが可能である。なお、仮に第2期間T2において二次計測値を取得できなくとも、定電力制御処理を実行しない場合と比較して、実質的に一次計測値を取得する時点と二次計測値を取得する時点とを近づけることが可能である。
したがって、本実施形態の非接触給電システム2では、一次制御回路22は、定電力制御処理を実行しない場合と比較して、正確な伝達効率を算出し易く、結果として正確な一次目標値を算出し易い。そして、本実施形態の非接触給電システム2では、一次制御回路22が一次回路21を制御すると、たとえば図6Bに示すように、二次計測値を速やかに二次目標値に一致させることができるので、二次電力が安定するまでの時間を短縮することができる。図6Bに示す例では、時刻t10から制御処理、定電力制御処理、及び更新処理を順次実行することで、時刻t11よりも前の時刻t12において二次計測値が二次目標値に一致して安定している。なお、図6Bにおいて、実線は二次計測値、一点鎖線は二次目標値を表している。
また、本実施形態の非接触給電システム2では、一次制御回路22は、定電力制御処理の実行期間(第2期間T2)において、二次制御回路5から二次計測値を取得するように構成されている。このため、本実施形態では、一次制御回路22は、実質的に同じ時点で取得した一次計測値及び二次計測値を用いて伝達効率を算出できるので、正しい伝達効率を算出し易い。
特に、本実施形態の非接触給電システム2では、定電力制御処理の実行期間(第2期間T2)は、二次制御回路5から送信される二次電力の送信間隔TC1よりも長くなっている。このため、本実施形態では、一次制御回路22は、第2期間T2において少なくとも1回以上、二次計測値を取得することが可能である。たとえば、第2期間T2において複数回、二次計測値を取得した場合は、一次制御回路22は、複数の二次計測値のうち最新の二次計測値を用いて更新処理を実行することが好ましい。なお、一次制御回路22を、第2期間T2において二次計測値を取得するように構成するか否かは任意である。
また、本実施形態の非接触給電システム2では、一次制御回路22は、制御処理を実行した後に、定電力制御処理を実行するように構成されている。このため、本実施形態の非接触給電システム2では、一次目標値が更新されると、速やかに一次計測値を一次目標値に一致させることが可能である。なお、一次制御回路22が、制御処理の実行後に定電力制御処理を実行するか否かは任意である。たとえば、一次制御回路22は、制御処理を実行する前に、定電力制御処理を実行してもよい。
また、本実施形態の非接触給電システム2では、一次制御回路22は、定電力制御処理の実行期間(第2期間T2)において、一次計測値の変化を監視するように構成されている。このため、本実施形態の非接触給電システム2では、定電力制御処理の実行時においても、たとえば負荷の変動や、給電コイル31と受電コイル41との結合係数の変動などによる一次電力の変動に、速やかに対応することができる。なお、一次制御回路22が定電力制御処理の実行期間において一次計測値の変化を監視するか否かは任意である。
ところで、実施形態1,2の非接触給電システム2では、一次制御回路22は、更新処理において、一次計測値及び二次計測値から伝達効率を算出する処理と、伝達効率及び二次目標値から一次目標値を算出する処理とを実行しているが、他の処理を実行してもよい。たとえば、一次制御回路22は、更新処理において、伝達効率を算出する処理を挟まずに、一次計測値、二次計測値、及び二次目標値から一次目標値を直接的に算出する処理を実行してもよい。この処理も、一次計測値及び二次計測値で定まる伝達効率と、二次目標値とに基づいて一次目標値を算出する処理といえる。
また、実施形態1,2の非接触給電システム2において、一次回路21は、電力補正回路を備えていてもよい。電力補正回路は、たとえばインバータ回路212とコンデンサ32(又はコンデンサ33)との間に設けられ、給電コイル31の出力する一次電力の大きさを補正するように構成される。電力補正回路は、たとえばコンデンサと、複数のスイッチ素子とで構成される。そして、電力補正回路は、複数のスイッチ素子が制御されることにより、コンデンサの充電電圧を給電コイル31に加減するように構成される。この場合、一次制御回路22は、PFC回路211やインバータ回路212を制御するだけでなく、電力補正回路の複数のスイッチ素子を制御することによっても、一次電力をフィードバック制御することが可能である。
また、実施形態1,2の非接触給電システム2は、いずれも一次回路21と、一次制御回路22とを備えていればよい。つまり、実施形態1,2の非接触給電システム2は、いずれも給電ユニット3を備えていなくてもよく、更には受電ユニット4や二次制御回路5等の二次側の機器を備えていなくてもよい。
以上述べた実施形態から明らかなように、本発明の第1の態様に係る非接触給電システム(2)は、一次回路(21)と、一次制御回路(22)とを備える。一次回路(21)は、給電コイル(31)に一次電力を供給する。一次制御回路(22)は、一次回路(21)を制御する。一次制御回路(22)は、一次電力の計測値である一次計測値を取得するように構成される。一次制御回路(22)は、給電コイル(31)に電磁結合される受電コイル(41)が受ける二次電力の計測値である二次計測値と、二次電力の目標値である二次目標値とを二次制御回路(5)から取得するように構成される。一次制御回路(22)は、制御処理と、更新処理とを交互に繰り返し実行するように構成される。制御処理は、一次電力の目標値である一次目標値に一次計測値が一致するように一次回路(21)を制御する処理である。更新処理は、一次目標値を更新する処理である。更新処理は、一次計測値及び二次計測値で定まる伝達効率と、二次目標値とに基づいて一次目標値を算出する処理を含む。
また、本発明の第2の態様に係る非接触給電システム(2)では、第1の態様において、一次制御回路(22)は、給電コイル(31)から受電コイル(41)への給電を開始した後の最初の制御処理の実行前において、前処理を実行するように構成されている。前処理は、初期値を伝達効率として一次目標値を算出する処理である。
また、本発明の第3の態様に係る非接触給電システム(2)では、第1又は第2の態様において、一次制御回路(22)は、更新処理を実行する前に、定電力制御処理を実行するように構成されている。定電力制御処理は、所定の期間、一次計測値が一定の大きさとなるように一次回路(21)を制御する処理である。
また、本発明の第4の態様に係る非接触給電システム(2)では、第3の態様において、一次制御回路(22)は、定電力制御処理の実行期間において、二次制御回路(5)から二次計測値を取得するように構成されている。
また、本発明の第5の態様に係る非接触給電システム(2)では、第4の態様において、定電力制御処理の実行期間は、二次制御回路(5)から間欠的に送信される二次計測値の送信間隔(TC1)よりも長い。
また、本発明の第6の態様に係る非接触給電システム(2)では、第3~第5のいずれかの態様において、一次制御回路(22)は、制御処理を実行した後に、定電力制御処理を実行するように構成されている。
また、本発明の第7の態様に係る非接触給電システム(2)では、第3~第6のいずれかの態様において、一次制御回路(22)は、定電力制御処理の実行期間において、一次計測値の変化を監視するように構成されている。
また、本発明の第8の態様に係る非接触給電システム(2)は、第1~第7のいずれかの態様において、一次電力を計測する一次計測部(23)を更に備える。一次制御回路(22)は、一次計測部(23)から一次計測値を取得するように構成されている。
また、本発明の第9の態様に係る非接触電力伝送システム(1)は、第1~第8のいずれかの態様の非接触給電システム(2)と、給電コイル(31)と、受電コイル(41)と、二次制御回路(5)とを備える。給電コイル(31)には、一次電力が供給される。受電コイル(41)は、給電コイル(31)に電磁結合される。二次制御回路(5)は、受電コイル(41)に供給される二次電力の計測値である二次計測値を取得するように構成される。そして、二次制御回路(5)は、二次計測値と、二次電力の目標値である二次目標値とを一次制御回路(22)に送信するように構成されている。
また、本発明の第10の態様に係る非接触電力伝送システム(1)は、第9の態様において、二次電力を計測する二次計測部45を更に備える。二次制御回路(5)は、二次計測部(45)から二次計測値を取得するように構成されている。
非接触給電システム(2)及び非接触電力伝送システム(1)は、二次計測値を速やかに二次目標値に近づけ易い。
1 非接触電力伝送システム
2 非接触給電システム
21 一次回路
22 一次制御回路
23 計測部(一次計測部)
31 給電コイル
41 受電コイル
45 計測部(二次計測部)
5 二次制御回路
TC1 送信間隔
2 非接触給電システム
21 一次回路
22 一次制御回路
23 計測部(一次計測部)
31 給電コイル
41 受電コイル
45 計測部(二次計測部)
5 二次制御回路
TC1 送信間隔
Claims (10)
- 給電コイルに一次電力を供給する一次回路と、
前記一次回路を制御する一次制御回路とを備え、
前記一次制御回路は、前記一次電力の計測値である一次計測値を取得するように構成され、
前記一次制御回路は、前記給電コイルに電磁結合される受電コイルが受ける二次電力の計測値である二次計測値と、前記二次電力の目標値である二次目標値とを二次制御回路から取得するように構成され、
前記一次制御回路は、
前記一次電力の目標値である一次目標値に、前記一次計測値が一致するように前記一次回路を制御する制御処理と、
前記一次目標値を更新する更新処理とを交互に繰り返し実行するように構成され、
前記更新処理は、
前記一次計測値及び前記二次計測値で定まる伝達効率と、前記二次目標値とに基づいて前記一次目標値を算出する処理を含むことを特徴とする非接触給電システム。 - 前記一次制御回路は、前記給電コイルから前記受電コイルへの給電を開始した後の最初の前記制御処理の実行前において、初期値を前記伝達効率として前記一次目標値を算出する前処理を実行するように構成されていることを特徴とする請求項1記載の非接触給電システム。
- 前記一次制御回路は、前記更新処理を実行する前に、所定の期間、前記一次計測値が一定の大きさとなるように前記一次回路を制御する定電力制御処理を実行するように構成されていることを特徴とする請求項1又は2記載の非接触給電システム。
- 前記一次制御回路は、前記定電力制御処理の実行期間において、前記二次制御回路から前記二次計測値を取得するように構成されていることを特徴とする請求項3記載の非接触給電システム。
- 前記定電力制御処理の実行期間は、前記二次制御回路から間欠的に送信される前記二次計測値の送信間隔よりも長いことを特徴とする請求項4記載の非接触給電システム。
- 前記一次制御回路は、前記制御処理を実行した後に、前記定電力制御処理を実行するように構成されていることを特徴とする請求項3乃至5のいずれか1項に記載の非接触給電システム。
- 前記一次制御回路は、前記定電力制御処理の実行期間において、前記一次計測値の変化を監視するように構成されていることを特徴とする請求項3乃至6のいずれか1項に記載の非接触給電システム。
- 前記一次電力を計測する一次計測部を更に備え、
前記一次制御回路は、前記一次計測部から前記一次計測値を取得するように構成されていることを特徴とする請求項1乃至7のいずれか1項に記載の非接触給電システム。 - 請求項1乃至8のいずれか1項に記載の非接触給電システムと、
前記一次電力が供給される給電コイルと、
前記給電コイルに電磁結合される受電コイルと、
前記受電コイルに供給される二次電力の計測値である二次計測値を取得するように構成される二次制御回路とを備え、
前記二次制御回路は、前記二次計測値と、前記二次電力の目標値である二次目標値とを前記一次制御回路に送信するように構成されていることを特徴とする非接触電力伝送システム。 - 前記二次電力を計測する二次計測部を更に備え、
前記二次制御回路は、前記二次計測部から前記二次計測値を取得するように構成されていることを特徴とする請求項9記載の非接触電力伝送システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17806060.4A EP3467996B1 (en) | 2016-05-30 | 2017-02-02 | Contactless power supply system and contactless power transmission system |
| JP2018520348A JP6778906B2 (ja) | 2016-05-30 | 2017-02-02 | 非接触給電システム及び非接触電力伝送システム |
| US16/305,659 US11128181B2 (en) | 2016-05-30 | 2017-02-02 | Contactless power feeding system and contactless power transfer system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016107869 | 2016-05-30 | ||
| JP2016-107869 | 2016-05-30 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017208498A1 true WO2017208498A1 (ja) | 2017-12-07 |
Family
ID=60478331
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/003764 WO2017208498A1 (ja) | 2016-05-30 | 2017-02-02 | 非接触給電システム及び非接触電力伝送システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11128181B2 (ja) |
| EP (1) | EP3467996B1 (ja) |
| JP (1) | JP6778906B2 (ja) |
| WO (1) | WO2017208498A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113572276A (zh) * | 2021-08-02 | 2021-10-29 | 鲁东大学 | 基于线圈结构进行无线充电对位及信息传递的系统与方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013192326A (ja) * | 2012-03-13 | 2013-09-26 | Nissan Motor Co Ltd | 非接触給電装置 |
| JP2014103751A (ja) * | 2012-11-19 | 2014-06-05 | Toshiba Corp | 無線電力伝送制御装置、送電装置、受電装置および無線電力伝送システム |
| JP2014176173A (ja) * | 2013-03-07 | 2014-09-22 | Fujitsu Ltd | 電力伝送装置、受電装置、及び、送電装置 |
| JP2015089221A (ja) | 2013-10-30 | 2015-05-07 | パイオニア株式会社 | 給電装置及び方法、並びにコンピュータプログラム |
| WO2015177860A1 (ja) * | 2014-05-20 | 2015-11-26 | 富士通株式会社 | 無線電力伝送制御方法および無線電力伝送システム |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101947980B1 (ko) * | 2012-09-12 | 2019-02-14 | 삼성전자주식회사 | 무선 전력 전송 장치 및 방법, 무선 전력 수신 장치 |
| US9608465B2 (en) * | 2014-04-18 | 2017-03-28 | Qualcomm Incorporated | Devices, systems, and method for power control of dynamic electric vehicle charging systems |
| WO2016135864A1 (ja) * | 2015-02-24 | 2016-09-01 | 富士通株式会社 | 送電器、無線電力伝送システムおよび受電器の位置情報算出方法 |
-
2017
- 2017-02-02 WO PCT/JP2017/003764 patent/WO2017208498A1/ja unknown
- 2017-02-02 JP JP2018520348A patent/JP6778906B2/ja active Active
- 2017-02-02 US US16/305,659 patent/US11128181B2/en active Active
- 2017-02-02 EP EP17806060.4A patent/EP3467996B1/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013192326A (ja) * | 2012-03-13 | 2013-09-26 | Nissan Motor Co Ltd | 非接触給電装置 |
| JP2014103751A (ja) * | 2012-11-19 | 2014-06-05 | Toshiba Corp | 無線電力伝送制御装置、送電装置、受電装置および無線電力伝送システム |
| JP2014176173A (ja) * | 2013-03-07 | 2014-09-22 | Fujitsu Ltd | 電力伝送装置、受電装置、及び、送電装置 |
| JP2015089221A (ja) | 2013-10-30 | 2015-05-07 | パイオニア株式会社 | 給電装置及び方法、並びにコンピュータプログラム |
| WO2015177860A1 (ja) * | 2014-05-20 | 2015-11-26 | 富士通株式会社 | 無線電力伝送制御方法および無線電力伝送システム |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113572276A (zh) * | 2021-08-02 | 2021-10-29 | 鲁东大学 | 基于线圈结构进行无线充电对位及信息传递的系统与方法 |
| CN113572276B (zh) * | 2021-08-02 | 2024-01-26 | 鲁东大学 | 基于线圈结构进行无线充电对位及信息传递的系统与方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3467996B1 (en) | 2021-01-20 |
| JPWO2017208498A1 (ja) | 2019-04-04 |
| US20200328618A1 (en) | 2020-10-15 |
| EP3467996A1 (en) | 2019-04-10 |
| EP3467996A4 (en) | 2019-04-10 |
| US11128181B2 (en) | 2021-09-21 |
| JP6778906B2 (ja) | 2020-11-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6394632B2 (ja) | ワイヤレス電力伝送システム | |
| US20140103711A1 (en) | Contactless power receiving device, vehicle equipped with the same, contactless power transmitting device, and contactless power transfer system | |
| US20160355095A1 (en) | Wireless Power Supply System and Power Transmission Device | |
| US20160141919A1 (en) | Power feed device, power reception device and power feed method | |
| JP5696681B2 (ja) | 電力伝送システム並びにその送電装置及び受電装置 | |
| US9738170B2 (en) | Wireless power supply system and power transmission device | |
| JP6191403B2 (ja) | パワーコンディショナ、太陽電池システム、および異常判定方法 | |
| JP2013158188A (ja) | 電力伝送システム | |
| CN112585857A (zh) | 电力变换装置 | |
| WO2015004778A1 (ja) | 電力伝送システム | |
| JP2014124019A (ja) | ワイヤレス電力伝送システム | |
| JP6111625B2 (ja) | ワイヤレス電力伝送装置 | |
| WO2017208498A1 (ja) | 非接触給電システム及び非接触電力伝送システム | |
| KR102396628B1 (ko) | 무접촉 에너지 전송을 위한 전송 시스템 | |
| JP5772687B2 (ja) | 電力伝送システム、その送電装置及び受電装置、並びに充電設備及び電気自動車 | |
| JP2016220293A (ja) | 非接触送電装置 | |
| JP6702541B2 (ja) | 無線電力伝送装置、送電装置および受電装置 | |
| JP7021007B2 (ja) | 非接触受電装置 | |
| JP2019213267A (ja) | 非接触送電装置 | |
| JP2016220316A (ja) | 非接触電力伝送装置及び受電機器 | |
| JP2016092959A (ja) | 送電機器及び非接触電力伝送装置 | |
| WO2016006470A1 (ja) | 送電機器及び非接触電力伝送装置 | |
| US11945317B2 (en) | Inductive power transfer system for derating a battery charging profile of electric vehicle batteries and control method thereof | |
| JP6615575B2 (ja) | 給電システム | |
| WO2014080671A1 (ja) | 非接触送電システム及び受電装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| ENP | Entry into the national phase |
Ref document number: 2018520348 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17806060 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2017806060 Country of ref document: EP Effective date: 20190102 |