WO2017104029A1 - 燃焼状態推定装置 - Google Patents
燃焼状態推定装置 Download PDFInfo
- Publication number
- WO2017104029A1 WO2017104029A1 PCT/JP2015/085256 JP2015085256W WO2017104029A1 WO 2017104029 A1 WO2017104029 A1 WO 2017104029A1 JP 2015085256 W JP2015085256 W JP 2015085256W WO 2017104029 A1 WO2017104029 A1 WO 2017104029A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- angular velocity
- rotating body
- blade
- cylinder
- combustion
- Prior art date
Links
Images








Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/14—Introducing closed-loop corrections
- F02D41/1438—Introducing closed-loop corrections using means for determining characteristics of the combustion gases; Sensors therefor
- F02D41/1444—Introducing closed-loop corrections using means for determining characteristics of the combustion gases; Sensors therefor characterised by the characteristics of the combustion gases
- F02D41/1445—Introducing closed-loop corrections using means for determining characteristics of the combustion gases; Sensors therefor characterised by the characteristics of the combustion gases the characteristics being related to the exhaust flow
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D23/00—Controlling engines characterised by their being supercharged
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F01—MACHINES OR ENGINES IN GENERAL; ENGINE PLANTS IN GENERAL; STEAM ENGINES
- F01N—GAS-FLOW SILENCERS OR EXHAUST APPARATUS FOR MACHINES OR ENGINES IN GENERAL; GAS-FLOW SILENCERS OR EXHAUST APPARATUS FOR INTERNAL COMBUSTION ENGINES
- F01N13/00—Exhaust or silencing apparatus characterised by constructional features ; Exhaust or silencing apparatus, or parts thereof, having pertinent characteristics not provided for in, or of interest apart from, groups F01N1/00 - F01N5/00, F01N9/00, F01N11/00
- F01N13/008—Mounting or arrangement of exhaust sensors in or on exhaust apparatus
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D35/00—Controlling engines, dependent on conditions exterior or interior to engines, not otherwise provided for
- F02D35/02—Controlling engines, dependent on conditions exterior or interior to engines, not otherwise provided for on interior conditions
- F02D35/023—Controlling engines, dependent on conditions exterior or interior to engines, not otherwise provided for on interior conditions by determining the cylinder pressure
- F02D35/024—Controlling engines, dependent on conditions exterior or interior to engines, not otherwise provided for on interior conditions by determining the cylinder pressure using an estimation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D45/00—Electrical control not provided for in groups F02D41/00 - F02D43/00
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F01—MACHINES OR ENGINES IN GENERAL; ENGINE PLANTS IN GENERAL; STEAM ENGINES
- F01N—GAS-FLOW SILENCERS OR EXHAUST APPARATUS FOR MACHINES OR ENGINES IN GENERAL; GAS-FLOW SILENCERS OR EXHAUST APPARATUS FOR INTERNAL COMBUSTION ENGINES
- F01N2340/00—Dimensional characteristics of the exhaust system, e.g. length, diameter or volume of the apparatus; Spatial arrangements of exhaust apparatuses
- F01N2340/02—Dimensional characteristics of the exhaust system, e.g. length, diameter or volume of the apparatus; Spatial arrangements of exhaust apparatuses characterised by the distance of the apparatus to the engine, or the distance between two exhaust treating apparatuses
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F01—MACHINES OR ENGINES IN GENERAL; ENGINE PLANTS IN GENERAL; STEAM ENGINES
- F01N—GAS-FLOW SILENCERS OR EXHAUST APPARATUS FOR MACHINES OR ENGINES IN GENERAL; GAS-FLOW SILENCERS OR EXHAUST APPARATUS FOR INTERNAL COMBUSTION ENGINES
- F01N2560/00—Exhaust systems with means for detecting or measuring exhaust gas components or characteristics
- F01N2560/07—Exhaust systems with means for detecting or measuring exhaust gas components or characteristics the means being an exhaust gas flow rate or velocity meter or sensor, intake flow meters only when exclusively used to determine exhaust gas parameters
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F01—MACHINES OR ENGINES IN GENERAL; ENGINE PLANTS IN GENERAL; STEAM ENGINES
- F01N—GAS-FLOW SILENCERS OR EXHAUST APPARATUS FOR MACHINES OR ENGINES IN GENERAL; GAS-FLOW SILENCERS OR EXHAUST APPARATUS FOR INTERNAL COMBUSTION ENGINES
- F01N2900/00—Details of electrical control or of the monitoring of the exhaust gas treating apparatus
- F01N2900/04—Methods of control or diagnosing
- F01N2900/0416—Methods of control or diagnosing using the state of a sensor, e.g. of an exhaust gas sensor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F01—MACHINES OR ENGINES IN GENERAL; ENGINE PLANTS IN GENERAL; STEAM ENGINES
- F01N—GAS-FLOW SILENCERS OR EXHAUST APPARATUS FOR MACHINES OR ENGINES IN GENERAL; GAS-FLOW SILENCERS OR EXHAUST APPARATUS FOR INTERNAL COMBUSTION ENGINES
- F01N2900/00—Details of electrical control or of the monitoring of the exhaust gas treating apparatus
- F01N2900/06—Parameters used for exhaust control or diagnosing
- F01N2900/14—Parameters used for exhaust control or diagnosing said parameters being related to the exhaust gas
- F01N2900/1411—Exhaust gas flow rate, e.g. mass flow rate or volumetric flow rate
Definitions
- the present invention relates to a combustion state estimation device.
- JP2013-68130A discloses a system in which the in-cylinder pressure of each cylinder is detected by an in-cylinder pressure sensor provided for each cylinder of the internal combustion engine.
- the present invention has been made paying attention to such problems, and an object thereof is to estimate the combustion state of a cylinder without using an in-cylinder pressure sensor.
- a combustion state estimation device is rotatably accommodated in a housing provided on an exhaust path of an engine body having a cylinder, and at least one blade is provided.
- a rotating body that is rotationally driven by the energy of the exhaust gas discharged from each cylinder of the engine body, and a passage that is provided in the housing and detects that the blade of the rotating body has passed through a predetermined position in the housing.
- the angular velocity of the rotating body is calculated based on the detection sensor and the detection result of the passage detection sensor, and at least one of the combustion energy or the combustion interval of the cylinder of the engine body is calculated based on the angular velocity of the rotating body.
- a configured arithmetic device is rotatably accommodated in a housing provided on an exhaust path of an engine body having a cylinder, and at least one blade is provided.
- the combustion state estimation device by providing the combustion state estimation device on the exhaust path, the combustion state of the cylinder such as the combustion energy and the combustion interval of the cylinder of the engine body can be estimated. Therefore, the combustion state of the cylinder can be estimated without using the in-cylinder pressure sensor.
- FIG. 1 is a schematic configuration diagram of an internal combustion engine according to an embodiment of the present invention.
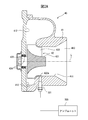
- FIG. 2A is a schematic cross-sectional view of a rotating body and a housing.
- FIG. 2B is a schematic plan view of the rotating body.
- FIG. 3 is a diagram for explaining the detection principle of an eddy current sensor as a passage detection sensor.
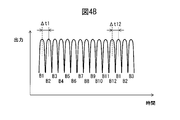
- FIG. 4A is a diagram showing a transition of an output value when an eddy current sensor is used as a passage detection sensor.
- FIG. 4B is a diagram showing a transition of an output value when an eddy current sensor is used as a passage detection sensor.
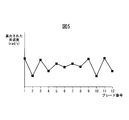
- FIG. 5 is a diagram illustrating an example of the calculation result of the angular velocity of the compressor wheel when the rotating body is rotated at a constant angular velocity.
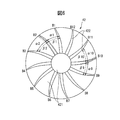
- FIG. 6 is a schematic plan view of a rotating body in which a shape error has occurred in the blade.
- FIG. 7 is a diagram showing transition of the angular velocity and kinetic energy of the rotating body in one cycle of the internal combustion engine.
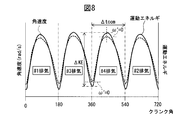
- FIG. 8 is a diagram for explaining a method for calculating the combustion energy of each cylinder and the combustion interval of each cylinder.
- FIG. 9 is a flowchart illustrating the angular velocity calculation control of the rotating body according to the embodiment of the present invention.
- FIG. 10 is a flowchart illustrating the estimation control of the combustion energy of each cylinder of the engine body according to the embodiment of the present invention.
- FIG. 11 is a flowchart for explaining the estimation control of the combustion interval of each cylinder of the engine body according to the embodiment of the present invention.
- FIG. 1 is a schematic configuration diagram of an internal combustion engine 100 according to an embodiment of the present invention.
- the internal combustion engine 100 includes an engine body 1, an intake device 20, an exhaust device 30, and an electronic control unit 200 for controlling the internal combustion engine 100.
- the internal combustion engine 100 is a so-called multi-cylinder internal combustion engine in which the engine body 1 has a plurality of cylinders 4.
- the engine body 1 burns fuel in a combustion chamber 6 formed in each cylinder 4 to generate power for driving a vehicle, for example.
- the engine body 1 has four cylinders 4.
- the number of cylinders is not particularly limited, and may be one (single cylinder), for example.
- the engine body 1 sparks and burns fuel in the combustion chamber 6, but the fuel combustion method is not particularly limited, and the fuel may be compressed and self-ignited and burned in the combustion chamber. .
- the configuration of the engine body 1 will be described.
- the engine body 1 includes a cylinder block 2 and a cylinder head 3 fixed to the upper surface of the cylinder block 2.
- a plurality of cylinders 4 are formed in the cylinder block 2. Inside the cylinder 4 is received a piston 5 that receives combustion pressure and reciprocates inside the cylinder 4. The piston 5 is connected to a crankshaft via a connecting rod, and the reciprocating motion of the piston 5 is converted into rotational motion by the crankshaft.
- a space defined by the inner wall surface of the cylinder head 3, the inner wall surface of the cylinder 4, and the piston crown surface is a combustion chamber 6.
- the cylinder head 3 has an intake port 7 that opens to one side surface of the cylinder head 3 and opens to the combustion chamber 6 of each cylinder 4, and opens to the other side surface of the cylinder head 3 and combustion chamber of each cylinder 4. 6 is formed.
- the cylinder head 3 includes an intake valve 9 for opening and closing the opening between the combustion chamber 6 and the intake port 7, an exhaust valve 10 for opening and closing the opening between the combustion chamber 6 and the exhaust port 8, and an intake valve 9.
- An intake camshaft 11 that opens and closes and an exhaust camshaft 12 that opens and closes the exhaust valve 10 are attached.
- the cylinder head 3 has a fuel injection valve 13 for injecting fuel into the combustion chamber 6, and an ignition for igniting the mixture of fuel and air injected from the fuel injection valve 13 in the combustion chamber 6.
- a plug 14 is attached.
- the fuel injection valve 13 may be attached so as to inject fuel into the intake port 7.
- the intake device 20 is a device for introducing air into the cylinder 4 through the intake port 7, and includes an air cleaner 21, an intake pipe 22, an intake manifold 23, an electronically controlled throttle valve 24, and an air flow meter. 211.
- the air cleaner 21 removes foreign matters such as sand contained in the air.
- the intake pipe 22 has one end connected to the air cleaner 21 and the other end connected to a surge tank 23 a of the intake manifold 23.
- the intake pipe 22 guides air (intake air) flowing into the intake pipe 22 via the air cleaner 21 to the surge tank 23 a of the intake manifold 23.
- the intake manifold 23 includes a surge tank 23a and a plurality of intake branch pipes 23b branched from the surge tank 23a and connected to the openings of the intake ports 7 formed on the side surface of the cylinder head.
- the air guided to the surge tank 23a is evenly distributed in each cylinder 4 through the intake branch pipe 23b.
- the throttle valve 24 is provided in the intake pipe 22.
- the throttle valve 24 is driven by a throttle actuator 25 to change the passage cross-sectional area of the intake pipe 22 continuously or stepwise.
- throttle opening By adjusting the opening of the throttle valve 24 (hereinafter referred to as “throttle opening”) by the throttle actuator 25, the amount of intake air taken into each cylinder 4 is adjusted.
- the throttle opening is detected by the throttle sensor 212.
- the air flow meter 211 is provided in the intake pipe 22 upstream of the throttle valve 24.
- the air flow meter 211 detects the flow rate of air flowing through the intake pipe 22 (hereinafter referred to as “intake amount”).
- the exhaust device 30 is a device for purifying the combustion gas (exhaust gas) generated in the combustion chamber 6 and discharging it to the outside air.
- the exhaust device 30 includes an exhaust manifold 31, an exhaust pipe 32, and an exhaust aftertreatment device 33. Prepare.
- the exhaust manifold 31 includes a plurality of exhaust branch pipes 31a connected to the openings of the exhaust ports 8 formed on the side surface of the cylinder head, and a collection pipe 31b that collects the exhaust branch pipes 31a into one. Prepare.
- the exhaust pipe 32 has one end connected to the collecting pipe 31b of the exhaust manifold 31 and the other end opened to the outside air. Exhaust gas discharged from each cylinder 4 through the exhaust port 8 to the exhaust manifold 31 flows through the exhaust pipe 32 and is discharged to the outside air.
- the exhaust aftertreatment device 33 is a device for purifying exhaust gas and discharging it to the outside air, and includes various catalysts for purifying harmful substances, filters for collecting harmful substances, and the like.
- the internal combustion engine 100 further includes a combustion state estimation device 40 for estimating the combustion state of each cylinder 4 such as the combustion energy of each cylinder 4 of the engine body 1 and the combustion interval of each cylinder 4.
- the combustion state estimation device 40 includes a housing 41 connected to the exhaust pipe 32, a rotating body 42 rotatably disposed in the housing 41, a passage detection sensor 301 attached to the housing 41, and a passage detection sensor 301.
- the angular velocity of the rotating body 42 is calculated based on the output result, and the combustion state of each cylinder 4 such as the combustion energy of each cylinder 4 of the engine body 1 and the combustion interval of each cylinder 4 is estimated based on the angular velocity of the rotating body 42.
- an amplifier unit 300 configured to be able to do this. Details of the combustion state estimation device 40 will be described later with reference to FIG.
- the electronic control unit 200 is composed of a digital computer, and includes a ROM (read only memory), a RAM (random access memory), a CPU (microprocessor), an input port and an output port which are connected to each other by a bidirectional bus.
- ROM read only memory
- RAM random access memory
- CPU microprocessor
- the electronic control unit 200 provides a signal for calculating the engine speed every time the crankshaft of the engine body 1 rotates, for example, 15 °.
- An output signal such as a crank angle sensor 213 that generates an output pulse is input via an input port.
- output signals of various sensors necessary for controlling the internal combustion engine 100 are input to the electronic control unit 200 via the input port.
- the electronic control unit 200 is electrically connected with control components such as the fuel injection valve 13, the spark plug 14, and the throttle actuator 25 through output ports.
- the electronic control unit 200 is connected to the amplifier unit 300 via a CAN (Controller (Area Network) communication line so that data can be transmitted and received with each other by CAN communication.
- CAN Controller (Area Network) communication line
- the combustion state of each cylinder 4 of the engine body 1 estimated by the amplifier unit 300 is transmitted to the electronic control unit 200.
- the electronic control unit 200 according to the present embodiment depending on the combustion state of each cylinder 4 of the engine body 1 transmitted from the amplifier unit 300, parameters related to combustion of each cylinder 4, that is, the combustion injection amount, the intake amount, and the ignition It is configured to be able to control time etc.
- FIG. 2A is a schematic cross-sectional view of the housing 41 and the rotating body 42.
- FIG. 2B is a schematic plan view of the rotating body 42.
- the rotating body 42 includes a central body 421 fixed to a shaft 423 rotatably supported by a rolling bearing 424, and a radial direction and an axial direction of the rotating body 42 from the surface of the central body 421.
- a plurality of blades 422 extending.
- the central body 421 is fixed to the shaft 423 so that its axis L is coaxial with the axis of the shaft 423.
- the rotating body 42 is disposed inside the housing 41 so that it can rotate around the axis L. Further, when the rotating body 42 rotates, the radial end portion of the blade 422 moves in the circumferential direction along the inner peripheral surface with a slight gap from the inner peripheral surface of the housing 41. Arranged inside the housing 41.
- the rotating body 42 has twelve blades 422 having the same shape and arranged at equal intervals.
- the blades 422 are numbered B1 to B12, respectively.
- the number of blades 422 is not limited to twelve, and may be more than twelve or less than twelve.
- each blade 422 is configured to extend in the radial direction and the axial direction of the rotating body 42.
- the plurality of blades 422 may have any shape such as a curved shape as long as the rotating body 42 can be rotationally driven by the exhaust gas flowing into the housing 41.
- the blades 422 are not necessarily arranged at equal intervals, and a part or all of the blades 422 may have a different shape from the other blades.
- the housing 41 has a central passage 411 extending through the center of the housing 41, and an annular passage 412 extending around the central passage 411 and into which exhaust gas flowing through the exhaust pipe flows.
- An annular passage 412 is disposed around one end (left side in the figure) of the central passage 411, and the rotating body 42 is disposed in the central passage 411 inside the annular passage 412.
- the other end (right side in the figure) of the central passage 411 is open, and constitutes an outlet 413 through which exhaust flows out. Therefore, the exhaust gas flowing through the exhaust pipe 32 flows out from the outlet 413 of the central passage 411 through the annular passage 412 and the rotating body 42.
- a passage detection sensor 301 is attached to the housing 41 in order to detect that the blade 422 has passed through a predetermined angular position (predetermined position) in the housing 41.
- the passage detection sensor 301 detects that the blade 422 has passed in front of the detection unit of the passage detection sensor 301.
- the passage detection sensor 301 is disposed on the housing 41 so as to face the radial end surface 422a of the blade 422 of the rotating body 42 and to be substantially parallel to the normal direction of the radial end surface 422a of the blade 422. It is attached.
- the output value of the passage detection sensor 301 is input to the amplifier unit 300.
- the amplifier unit 300 includes an amplifier that amplifies the output value of the passage detection sensor 301, and a CPU (microprocessor) that performs various calculations such as calculation of the angular velocity of the rotating body 42 using the output value amplified by the amplifier. It is an integrated one.
- the passage detection sensor 301 and the amplifier unit 300 are separated from each other, but the passage detection sensor 301 may be built in, and the passage detection sensor 301 and the amplifier unit 300 may be integrated.
- an eddy current sensor is used as the passage detection sensor 301.
- the eddy current sensor is a sensor that outputs a voltage value corresponding to the distance between the sensor detection unit and the metal material to be measured. The detection principle of the eddy current sensor will be briefly described below with reference to FIG.
- the eddy current sensor has a coil 301a that generates a magnetic field by an alternating excitation current at its detection unit.
- an eddy current Y is generated in the blade 422 so as to cancel the magnetic field generated by the coil 301a.
- the strength of the magnetic field X changes due to the eddy current generated in the blade 422, and as a result, the value of the current flowing through the coil 301a changes. Therefore, it is possible to detect whether or not the blade 422 has passed by detecting a change in voltage value caused by a change in the current value flowing through the coil 301a by the eddy current sensor.
- the output value of the eddy current sensor reaches a peak, the blade 422 passes in front of the detection unit of the eddy current sensor 5 (that is, a predetermined angular position in the housing 41). Can be determined.
- any sensor may be used as the passage detection sensor 301 that detects the passage of the blade 422 as long as the passage of the blade 422 can be detected.
- An example of such a sensor is an electromagnetic pickup (MPU) sensor.
- the MPU sensor is a sensor having a magnet and a detection coil in its detection unit.
- the magnetic flux penetrating the detection coil changes, and the induced electromotive force of the detection coil changes accordingly.
- the passage of the blade 422 in front of the detection unit of the MPU sensor can be detected.
- an eddy current sensor is used as the passage detection sensor 301 will be described.
- FIG. 4A and 4B are diagrams showing transition of the output value (voltage value) of the passage detection sensor 301 when an eddy current sensor is used as the passage detection sensor 301.
- FIG. 4A shows the transition of the output value when the angular speed of the rotating body 42 is relatively slow (for example, the rotational speed of the rotating body 42 is 200,000 [rpm]), and
- FIG. 4B shows the case where the angular speed of the rotating body 42 is relatively fast.
- the transition of the output value at each time (for example, the rotational speed of the rotating body 42 is 400,000 [rpm]) is shown.
- the output value increases as the distance between the detection unit of the passage detection sensor 301 and the object (blade 422 in the present embodiment) passing in front of the detection portion decreases. Therefore, when the blade 422 passes in front of the detection unit of the passage detection sensor 301, the output value of the passage detection sensor 301 increases rapidly. Therefore, the output changed into a convex shape in FIGS. 4A and 4B means that the blade 422 has passed.
- the numbers B1 to B12 in FIGS. 4A and 4B are the numbers of the blades 422 that have passed in front of the detection unit of the passage detection sensor 301.
- the output value of the passage detection sensor 301 increases and decreases rapidly as the blade 422 passes, and two adjacent blades 422 The period during which passes is kept constant at a low value.
- the passage detection sensor 301 can accurately detect that the blade 422 has passed in front of the detection unit of the passage detection sensor 301. Therefore, as an example of a method for calculating the angular velocity of the rotating body 42 using the passage detection sensor 301, an arbitrary one of the blades 422 (hereinafter referred to as “reference blade”) passes in front of the passage detection sensor 301. After that, each time each blade 422 passes in front of the passage detection sensor 301 based on the time interval until the blade passing in front of the passage detection sensor 301 next to the reference blade, A method for calculating the angular velocity is mentioned.
- the time when the output value of the passage detection sensor 301 shows a peak when the first blade B1 passes in front of the passage detection sensor 301 is time t1.
- the second blade B2, the third blade B3, and the fourth blade B4 pass in front of the passage detection sensor 301 and the output value of the passage detection sensor 301 shows a peak, times t2, t3, and t4, respectively. To do.
- the time interval ⁇ t1 from the passage of the first blade B1 through the passage detection sensor 301 to the passage of the second blade B2 is t2-t1.
- the angular interval between the first blade B1 and the second blade B2 is basically (2 ⁇ / 12) [rad].
- the instantaneous angular velocity of the rotating body 42 from when the first blade B1 passes through the passage detection sensor 301 to when the second blade B2 passes (hereinafter referred to as “instantaneous angular velocity after passing through the first blade”).
- ⁇ 1 [rad / s] is 2 ⁇ / (12 ⁇ ⁇ t1).
- the time interval ⁇ t2 from the passage of the second blade B2 to the passage of the third blade B3 in front of the passage detection sensor 301 is t3-t2, and after the passage of the third blade B3, the fourth blade B4.
- the time interval ⁇ t3 until passes is t4-t3.
- the instantaneous angular velocity ⁇ 3 of the rotating body 42 from the passage of the third blade B3 to the passage of the fourth blade B4 in front of the passage detection sensor 301 that is, the instantaneous angular velocity ⁇ 3 after passing the third blade. Is 2 ⁇ / (12 ⁇ ⁇ t3).
- the pair of adjacent blades 422 that is, the i-th blade Bi and the (i + 1) -th blade B (i + 1)
- the passage detection sensor 301 Is calculated, the instantaneous angular velocity ⁇ i after passing through the i-th blade Bi is calculated based on the time interval ⁇ ti and the angular interval between the pair of adjacent blades 422. be able to.
- the angular interval ⁇ i between adjacent pairs of blades 422 is divided by the time interval ⁇ ti that passes between these blades 422 to instantaneously pass through the i-th blade.
- a precise angular velocity ⁇ i can be calculated.
- the angular interval ⁇ i is (2 ⁇ / p), where p is the total number of blades 422. Become. Therefore, the instantaneous angular velocity ⁇ i after passing through the i-th blade can be calculated by the following equation (2).
- FIG. 5 is a diagram illustrating an example of a calculation result when the angular velocity of the rotating body 42 is calculated by the above-described calculation method when the rotating body 42 is rotated at a constant angular velocity.
- the horizontal axis represents the number of the blade 422
- the vertical axis represents the instantaneous angular velocity of the rotating body 42 after passing through the blade of the corresponding blade number.
- the rotating body 42 is rotated at a constant angular velocity. Therefore, the instantaneous angular velocity of the rotating body 42 calculated at this time should be a constant value. However, actually, as shown in FIG. 5, the calculated instantaneous angular velocity of the rotating body 42 is not necessarily constant after passing through each blade 422. For example, in the example shown in FIG. 5, the instantaneous angular velocity of the rotating body 42 after passing through the second blade is slower than the instantaneous angular velocity of the rotating body 42 after passing through the first blade.
- each blade 422 of the rotating body 42 may have a shape error due to a manufacturing error or a secular change, and this shape error causes an error when the instantaneous angular velocity of the rotating body 42 is calculated.
- the relationship between the calculated instantaneous angular velocity of the rotating body 42 and the shape error of the blade 422 will be described with reference to FIG.
- FIG. 6 is a schematic plan view of the rotating body 42 in which a shape error has occurred in the blade 422. 6 indicates the shape of the blade 422 when the blade 422 of the rotating body 42 is formed as designed.
- the second blade B2 and the tenth blade B10 have a shape error with respect to the designed blade shape. Specifically, the second blade B2 has a shape shifted to the first blade side in the circumferential direction with respect to the design shape. Further, the tenth blade B10 has a shape shifted radially outward from the design shape.
- the angle interval ⁇ between the blades changes.
- the shape of the second blade B2 is a shape shifted in the circumferential direction with respect to the designed shape.
- the actual angular interval between the first blade B1 and the second blade B2 is ⁇ 1, which is smaller than the design value ⁇ 1.
- the actual angular interval between the second blade B2 and the third blade B3 is ⁇ 2, which is larger than the design value ⁇ 2. Accordingly, the actual angular interval ⁇ 1 between the first blade B1 and the second blade B2 is smaller than the actual angular interval ⁇ 2 between the second blade B2 and the third blade B3.
- the design value is used instead of the actual angular interval between the blades. For this reason, even if the rotating body 42 rotates at a constant angular velocity, the instantaneous angular velocity ⁇ 1 of the rotating body 42 based on the time interval ⁇ t1 from the first blade B1 to the second blade B2 is increased from the second blade B2 to the second blade B2. It is calculated as being faster than the instantaneous angular velocity ⁇ 2 of the rotating body 42 based on the time interval ⁇ t2 to the three blades B3. As a result, as shown in FIG. 5, the instantaneous angular velocity after passing through the first blade B1 is calculated to be faster than the instantaneous angular velocity after passing through the second blade B2.
- the tenth blade B10 has a shape shifted outward in the circumferential direction with respect to the design shape.
- the actual angular interval between the ninth blade B9 and the tenth blade B10 is ⁇ 9 which is smaller than the design value ⁇ 9.
- the actual angular interval between the tenth blade B10 and the eleventh blade B11 is ⁇ 10 which is larger than the design value ⁇ 10.
- FIG. 6 shows an example of a shape error in which the shape of the blade 422 is totally shifted in the circumferential direction or the radial direction.
- the shape error generated in the blade 422 includes various errors other than the above-described shape errors, such as an error in the axial direction of the rotating body 42 and an error in the curved shape of the blade. If such a shape error occurs in the blade 422, the angular velocity of the rotating body 42 cannot be accurately calculated.
- the time from when the reference blade passes in front of the passage detection sensor 301 until the blade that passes in front of the passage detection sensor 301 next to the reference blade passes.
- the reference blade passes next to the passage detection sensor 301 and then the reference blade passes next.
- the angular velocity of the rotating body 42 is calculated based on the time interval until it passes in front of the detection sensor 301, that is, the time required for the rotating body 42 to make one rotation.
- the angular velocity of the body 42 can be calculated. For example, when the reference blade is the first blade B1, the actual angular interval ⁇ 1 between the first blade B1 and the second blade B2 or the ninth blade B9 and the tenth blade B10 as in the example shown in FIG. Even if the actual angle interval ⁇ 9 between the first blade B1 and the first blade B1 is different from the design values ⁇ 1 and ⁇ 9, the angle interval is always 2 ⁇ [rad]. Even if the shape of the first blade B1 itself changes, the angular interval from the first blade B1 to the first blade B1 is always constant at 2 ⁇ [rad].
- the angular velocity of the rotating body 42 can be accurately calculated without being affected by the shape error of the blade 422. it can.
- Equation (3) I is the moment of inertia of the rotating body 42, and ⁇ is the angular velocity of the rotating body 42.
- the moment of inertia I of the rotating body 42 can be obtained in advance from the shape and material of the rotating body 42 by calculation or the like. Therefore, by obtaining the angular velocity of the rotating body 42, the kinetic energy of the rotating body 42 at the time when the angular velocity is obtained can be calculated.
- the angular velocity ⁇ of the rotating body 42 is calculated by the amplifier unit 300, and the kinetic energy of the rotating body 42 is calculated by the amplifier unit 300 using Equation (3).
- the angular velocity ⁇ of the rotating body 42 can be accurately estimated without being affected by the shape error of the rotating body 42, the kinetic energy of the rotating body 42 can also be accurately calculated.
- FIG. 7 is a diagram showing the transition of the angular velocity and kinetic energy of the rotating body 42 in one cycle of the internal combustion engine 100.
- the horizontal axis in the figure indicates the crank angle of the engine body 1.
- the solid line indicates the kinetic energy of the rotating body 42
- the broken line indicates the angular velocity of the rotating body 42.
- the angular velocity of the rotating body 42 changes in accordance with the crank angle of the engine body 1.
- the exhaust valve of the first cylinder is opened and the exhaust gas flows out from the combustion chamber 6, the exhaust gas flowing into the annular passage 412 in the housing 41 increases.
- the angular velocity of the rotating body 42 increases.
- the kinetic energy of the rotating body 42 also increases.
- the angular velocity of the rotating body 42 increases and then decreases, and accordingly, the kinetic energy of the rotating body 42 also increases and decreases. Further, such angular velocity and kinetic energy similarly change in the exhaust strokes of the other cylinders 4. Accordingly, in the four-cylinder internal combustion engine 100, the angular velocity and kinetic energy of the rotating body 42 fluctuate up and down largely four times per cycle of the internal combustion engine 100. That is, the angular velocity and kinetic energy of the rotating body 42 fluctuate up and down several times during one cycle of the internal combustion engine 100 according to the number of cylinders of the internal combustion engine 100.
- the amount of increase in the kinetic energy of the rotating body 42 during the exhaust stroke of the fourth cylinder ( ⁇ KE in FIG. 7) is the exhaust discharged from the combustion chamber 6 of the fourth cylinder. Is proportional to the exhaust energy.
- the amount of increase in kinetic energy of the rotating body 42 during the exhaust strokes of the first cylinder, the third cylinder, and the second cylinder is discharged from the combustion chambers 6 of the first cylinder, the third cylinder, and the second cylinder, respectively. It is proportional to the exhaust energy of the exhaust.
- the exhaust energy of the exhaust discharged from each cylinder 4 is basically based on the combustion energy generated when the fuel is burned in the combustion chamber 6 of each cylinder 4, that is, the combustion in the combustion chamber 6 of each cylinder 4. Proportional to generated torque (combustion torque).
- the difference in combustion energy (combustion torque) between the cylinders can be detected by comparing the amount of increase in the kinetic energy of the rotating body 42 during the exhaust stroke of each cylinder 4 between the cylinders. Specifically, the difference ( ⁇ KE) between the minimum value of the kinetic energy of the rotator 42 at the start of the exhaust stroke of each cylinder 4 and the maximum value of the kinetic energy of the rotator 42 during the exhaust stroke of the cylinder 4. Based on this, the difference in combustion energy (combustion torque) between the cylinders can be detected.
- the cylinder 4 having a large difference between the minimum value and the maximum value can be determined to be a cylinder 4 having a large combustion energy (combustion torque), and the cylinder 4 having a small difference between the minimum value and the maximum value has a combustion energy (combustion). It can be determined that the cylinder 4 has a small torque.
- the time interval from the start of the exhaust stroke of the fourth cylinder to the end of the exhaust stroke ( ⁇ tcom in FIG. 7), that is, the rotating body 42 is discharged from the combustion chamber 6 of the fourth cylinder.
- the period during which the exhaust is rotated corresponds to the combustion interval from the start of the combustion stroke of the second cylinder to the end of the combustion stroke.
- the time interval from the start of the exhaust stroke of the first cylinder, the third cylinder and the second cylinder to the end of the exhaust stroke is from the start of the combustion stroke of the third cylinder, the fourth cylinder and the first cylinder, respectively. This corresponds to the combustion interval until the end.
- the control unit 200 can perform feedback control or feedforward control. Thereby, the difference of the combustion energy (combustion torque) between the cylinders and the difference of the combustion interval can be minimized.
- the combustion state of the single cylinder such as the combustion energy (combustion torque) and the combustion interval of the single cylinder is calculated as needed, for example, in a steady state (no load fluctuation).
- the electronic control unit 200 performs feedback control and feedforward control on the parameters related to combustion of each cylinder 4 such as the fuel injection amount, the intake air amount, and the ignition timing so that the combustion states coincide. Can do.
- FIG. 8 is a diagram illustrating a method for calculating the combustion energy ⁇ KE of each cylinder 4 and the combustion interval ⁇ tcom of each cylinder 4.
- the horizontal axis in the figure indicates the crank angle of the engine body 1.
- the solid line in FIG. 8 indicates the kinetic energy of the rotating body 42, and the broken line indicates the angular velocity of the rotating body 42.
- the amplifier unit 300 sets the angular velocity ⁇ as the angular velocity current value ⁇ z of the rotating body 42 and sets the differential value of the angular velocity current value ⁇ z as the angular acceleration. It is calculated as the present value ⁇ z '. Then, the amplifier unit 300 uses the angular velocity current value ⁇ z when the absolute value of the current angular acceleration current value ⁇ z ′ is equal to or less than a preset extreme value determination threshold value near 0 as the exhaust value of each cylinder 4.
- Angular velocity at the start of the stroke (hereinafter referred to as “minimum angular velocity”) ⁇ L, or angular velocity at a certain point during the exhaust stroke of each cylinder 4 at which the kinetic energy of the rotating body 42 reaches the maximum value (maximum value) (hereinafter referred to as “maximum angular velocity”).
- the angular velocity current value ⁇ z when the absolute value of the angular acceleration current value ⁇ z ′ is equal to or less than the extreme value determination threshold, whether the angular velocity current value ⁇ z is the minimum angular velocity ⁇ L or the maximum angular velocity ⁇ H. This determination can be made by determining whether or not the previous angular acceleration value ⁇ z ⁇ 1 ′ calculated immediately before is a positive value.
- the amplifier unit 300 sets the angular velocity current value ⁇ z to the minimal angular velocity ⁇ L when the absolute value of the angular acceleration current value ⁇ z ′ is equal to or less than the extreme value determination threshold.
- the previous angular acceleration value ⁇ z ⁇ 1 ′ is a positive value, that is, when the slope of the broken line in FIG. 8 is positive, it can be determined that the angular velocity ⁇ changes from rising to falling.
- the angular velocity current value omega z when the absolute value of the angular acceleration current value omega z 'is equal to or less than extremum determination threshold is set to the maximum angular velocity .omega.H.
- Equation (3) Substituting the minimal angular velocity ⁇ L and the maximum angular velocity ⁇ H set in this way into Equation (3), respectively, the minimum value of the kinetic energy of the rotating body 42 at the start of the exhaust stroke of each cylinder 4 and the exhaust of the cylinder 4 It is possible to calculate the maximum value of the kinetic energy of the rotating body 42 during the stroke. If the minimum value is subtracted from the maximum value of the kinetic energy calculated in this way, the combustion energy ⁇ KE generated when the fuel is burned in the combustion chamber 6 of each cylinder 4 can be calculated.
- the combustion interval ⁇ tcom of each cylinder 4 corresponds to the time interval from the start of the exhaust stroke of each cylinder 4 to the end of the exhaust stroke. Therefore, the combustion interval ⁇ tcom of each cylinder 4 coincides with the time from when the minimal angular velocity ⁇ L is set until the next minimal angular velocity ⁇ L is set. Therefore, the amplifier unit 300 according to the present embodiment calculates the combustion interval of each cylinder 4 by measuring the time from when the minimal angular velocity ⁇ L is set to when the minimal angular velocity ⁇ L is set next.
- the combustion interval of each cylinder 4 is measured. ⁇ tcom can also be calculated.
- step S1 the amplifier unit 300 reads the output value of the passage detection sensor 301.
- step S2 the amplifier unit 300 determines whether or not the elapsed time measurement start flag F1 is set to 0.
- the elapsed time measurement start flag F1 is a flag whose initial value is set to 0.
- the passage detection sensor 301 detects the passage of the blade 422. And 1 are set. And if the angular velocity and rotation speed of the rotary body 42 are estimated, it will return to 0 again. If the elapsed time measurement start flag F1 is set to 0, the amplifier unit 300 proceeds to the process of step S2. On the other hand, if the elapsed time measurement start flag F1 is set to 1, the amplifier unit 300 proceeds to the process of step S5.
- step S3 the amplifier unit 300 determines whether or not the passage of the blade 422 is detected.
- the blade 422 whose passage has been detected in step S3 is an arbitrary one of a plurality of blades, that is, a reference blade. If the passage of the blade 422 is detected, the amplifier unit 300 proceeds to the process of step S4. On the other hand, if the passage of the blade 422 is not detected, the amplifier unit 300 ends the current process.
- step S4 the amplifier unit 300 sets the elapsed time measurement start flag F1 to 1, and starts measuring the elapsed time t e1 after the reference blade passes in front of the detection unit of the passage detection sensor 301.
- step S5 the amplifier unit 300 calculates a material obtained by integrating the sampling cycle t Smp to the previous value of the elapsed time t e1 as elapsed time t e1. It should be noted that the initial value of the elapsed time t e is 0.
- step S6 the amplifier unit 300 determines whether or not the passage of the blade 422 is detected by the passage detection sensor 301. If the passage detection sensor 301 detects the passage of the blade 422, the amplifier unit 300 proceeds to the process of step S7. On the other hand, if the overdetection sensor 5 does not detect the passage of the blade 422, the amplifier unit 300 ends the current process.
- step S7 the amplifier unit 300 calculates the blade passage number i after the reference blade passes in front of the detection unit of the passage detection sensor 301. Specifically, the amplifier unit 300 calculates the blade passage number i by adding 1 to the previous value of the blade passage number i. Note that the initial value of the blade passage number i is 0.
- step S8 the amplifier unit 300 determines whether or not the blade 422 that has detected passage in step S6 is a reference blade. Specifically, the amplifier unit 300 determines whether or not the blade passage number i is a value obtained by multiplying the total number of blades (12 in this embodiment) by a positive integer n.
- the positive integer n is set to 1, for example, it can be determined whether or not the rotating body 42 has rotated once in step S8. If it is set to 2, for example, whether the rotating body 42 has rotated twice in step S8. It can be determined whether or not. That is, the timing for estimating the angular velocity of the rotating body 42 can be adjusted in accordance with the positive integer n, and the estimated number of angular velocity data of the rotating body 42 per unit time can be adjusted.
- the positive integer n is set to 1. However, the positive integer n may be set to a value larger than 1 in accordance with the calculation capability of the CPU of the amplifier unit 300.
- the amplifier unit 300 proceeds to the process of step S9 if the blade 422 whose passage has been detected in step S6 is the reference blade. On the other hand, the amplifier unit 300 ends the current process if the blade 422 whose passage has been detected in step S6 is not the reference blade.
- step S9 the amplifier unit 300 sets the elapsed time t e1 calculated in step S5 as the reference blade passing time t m .
- the amplifier unit 300 first detects that the reference blade has passed in front of the detection unit of the passage detection sensor 301, and then the reference unit. blade time to pass in front of the detecting portion of the passage detection sensor 301 (time the rotating body 42 is taken for one rotation) is set as a reference blade passing time t m.
- step S10 the amplifier unit 300, based on the reference blade passing time t m, to calculate the angular velocity of the rotating body 42. Specifically, the amplifier unit 300 calculates the angular velocity ⁇ of the rotating body 42 by substituting the reference blade passage time t m into the following formula (4). Note In step S10, by substituting the reference blade passing time t m the following equation (5), may be calculated together rotational speed N of the rotating body 42.
- step S11 the amplifier unit 300 returns the elapsed time t e1 , the blade passage number i, and the elapsed time measurement start flag F1 to the initial value 0.
- step S21 the amplifier unit 300 determines whether or not the angular velocity ⁇ of the rotating body 42 is newly calculated by the above-described angular velocity calculation control of the rotating body 42. If the angular velocity ⁇ of the rotating body 42 is newly calculated, the amplifier unit 300 proceeds to the process of step S22. On the other hand, the amplifier unit 300 ends the current process if the angular velocity ⁇ of the rotating body 42 is not newly calculated.
- step S22 the amplifier unit 300 reads the angular velocity ⁇ of the rotating body 42 which is newly calculated, and the reference blade passing time t m that is used in the calculation, the.
- step S23 the amplifier unit 300 determines whether there are two or more data of the angular velocity ⁇ of the rotating body 42 read so far. If there are two or more data of the angular velocity ⁇ of the rotating body 42 read so far, the amplifier unit 300 proceeds to the process of step S24. On the other hand, the amplifier unit 300 ends the current process if the data of the angular velocity ⁇ of the rotating body 42 read so far is not two or more.
- step S24 the amplifier unit 300 calculates the angular acceleration current value ⁇ z ′ of the rotating body 42.
- Amplifier unit 300 Specifically, the angular velocity omega of the newly read rotator 42 now and angular current value omega z of the rotating body 42, an angular velocity omega of the rotating body 42 is loaded before one time, the angular velocity previous value omega z-1 of the rotating body 42. Then, the amplifier unit 300 substitutes the angular velocity current value ⁇ z , the angular velocity previous value ⁇ z ⁇ 1, and the reference blade passage time t m read in step S22 into the following formula (6), and the angular acceleration current value of the rotating body 42 is calculated. The value ⁇ z ′ is calculated.
- ⁇ z ′ ( ⁇ z ⁇ z ⁇ 1 ) / t m (6)
- step S25 the amplifier unit 300 determines whether or not the absolute value of the angular acceleration current value ⁇ z ′ of the rotating body 42 is equal to or less than the extreme value determination threshold value. If the angular acceleration current value ⁇ z ′ of the rotating body 42 is equal to or less than the extreme value determination threshold, the amplifier unit 300 proceeds to the process of step S26. On the other hand, if the angular acceleration current value ⁇ z ′ of the rotating body 42 is larger than the extreme value determination threshold, the amplifier unit 300 ends the current process.
- step S26 the amplifier unit 300 determines whether or not the previous angular acceleration value ⁇ z ⁇ 1 ′ of the rotating body 42 is a negative value. If the previous angular acceleration value ⁇ z ⁇ 1 ′ of the rotating body 42 is a negative value, the amplifier unit 300 proceeds to the process of step S27. On the other hand, if the previous angular acceleration value ⁇ z ⁇ 1 ′ of the rotating body 42 is a positive value, the amplifier unit 300 proceeds to the process of step S29.
- step S27 the amplifier unit 300 sets the angular velocity present value omega z of the rotating body 42 set in step S24 as a minimum angular velocity .omega.L.
- step S28 the amplifier unit 300 sets the flag F2 to 1.
- the flag F2 is a flag whose initial value is set to 0.
- step S29 the amplifier unit 300 determines whether or not the flag F2 is set to 1. If the flag F2 is set to 1, the amplifier unit 300 proceeds to the process of step S30. On the other hand, if the flag F2 is set to 0, the current process is terminated.
- step S30 the amplifier unit 300 sets the angular velocity present value omega z of the rotating body 42 set in step S24 as a maximum angular velocity .omega.H.
- step S31 the amplifier unit 300 substitutes the minimum angular velocity ⁇ L and the maximum angular velocity ⁇ H set in step S27 and step S30 into the following equation (7) to increase the kinetic energy increase ⁇ KE of the rotating body 42, that is, the current exhaust gas.
- the combustion energy generated when the fuel is burned in the combustion chamber 6 of the cylinder 4 during the stroke is calculated.
- ⁇ KE I ⁇ ⁇ ( ⁇ H 2 ⁇ L 2 ) / 2 ⁇ (7)
- step S32 the amplifier unit 300 returns the flag F2 to the initial value 0.
- step S41 the amplifier unit 300 determines whether or not the flag F3 is set to 0.
- the flag F3 is a flag in which an initial value (a value at the start of operation of the internal combustion engine 100) is set to 0, and is set to 1 when the minimum angular velocity ⁇ L is set for the first time after the operation of the internal combustion engine 100 is started. Is set.
- the flag F3 is returned to 0 when the internal combustion engine is stopped or started. If the flag F3 is set to 0, the amplifier unit 300 proceeds to the process of step S42. On the other hand, if the flag F3 is set to 1, the amplifier unit 300 proceeds to the process of step S44.
- step S42 the amplifier unit 300 determines whether or not the minimum angular velocity ⁇ L is set for the first time after the operation of the internal combustion engine 100 is started. Specifically, after the operation of the internal combustion engine 100 is started, the amplifier unit 300 proceeds to step S27 of the above-described combustion energy estimation control and determines whether or not the minimum angular velocity ⁇ L is set. After the operation of the internal combustion engine 100 is started, the amplifier unit 300 proceeds to step S27 of the combustion energy estimation control described above for the first time, and proceeds to the process of step S43 if the minimum angular velocity ⁇ L is set. On the other hand, after the operation of the internal combustion engine 100 is started, the amplifier unit 300 does not proceed to step S27 of the above-described combustion energy estimation control, and ends the current process if the minimum angular velocity ⁇ L has not yet been set.
- step S43 the amplifier unit 300 sets the flag F3 to 1, and starts measuring the elapsed time te2 after the angular velocity of the rotating body 42 becomes the minimal angular velocity.
- step S44 the amplifier unit 300 calculates the elapsed time t e2 by multiplying the previous value of the elapsed time t e2 by the sampling period t smp . Note that the initial value of the elapsed time t e2 is zero.
- step S45 the amplifier unit 300 determines whether or not the minimum angular velocity ⁇ L has been updated. If the minimum angular velocity ⁇ L has been updated, the amplifier unit 300 proceeds to the process of step S46. On the other hand, if the minimum angular velocity ⁇ L has not been updated, the amplifier unit 300 ends the current process.
- step S46 the amplifier unit 300 calculates the elapsed time t e2 calculated in step S44 as a combustion distance Derutatcom.
- step 47 the amplifier unit 300 returns the elapsed time t e2 to the initial value 0, and again starts measuring the elapsed time t e2 after the angular velocity of the rotating body 42 becomes the minimum angular velocity.
- the combustion state estimation device 40 is rotatably accommodated in the housing 41 provided on the exhaust pipe 32 (exhaust path) of the engine body 1 having the cylinder 4 and at least one of them.
- a rotating body 42 that has a blade 422 and is rotationally driven by the energy of exhaust discharged from each cylinder 4 of the engine body 1, and is provided in the housing 41. Is detected based on the detection result of the passage detection sensor 301 and the passage detection sensor 301, and the angular velocity of the rotating body 42 is calculated, and the cylinder 4 of the engine body 1 is determined based on the angular velocity of the rotating body 42.
- An amplifier unit 300 (arithmetic unit) configured to calculate at least one of combustion energy and combustion interval.
- the combustion state estimating device 40 including the housing 41, the rotating body 42, the passage detection sensor 301, and the amplifier unit 300 is provided in the exhaust pipe 32, so At least one of the combustion energy or the combustion interval of the cylinder 4 of the main body 1 can be calculated.
- an in-cylinder pressure sensor that detects the pressure in the combustion chamber 6 is provided for each cylinder 4, and based on the detection value of the in-cylinder pressure sensor, There is a method for calculating combustion energy.
- the same number of in-cylinder pressure sensors as the number of cylinders is required. Therefore, the estimation accuracy of the combustion energy of each cylinder 4 decreases due to individual variations in each cylinder pressure sensor. Furthermore, the degree of deterioration with time may be different for each in-cylinder pressure sensor, and as a result, the estimation accuracy of the combustion energy of each cylinder 4 further decreases with the passage of time.
- each combustion state estimation device 40 is provided in the exhaust pipe 32, and the combustion energy of each cylinder 4 of the engine body 1 and the combustion interval of each cylinder 4 are changed.
- the combustion state of the cylinder can be estimated. For this reason, it is possible to accurately estimate the combustion state of each cylinder 4 while suppressing a decrease in the estimation accuracy of the combustion state of each cylinder 4 due to individual variation or aging.
- the amplifier unit 300 passes the elapsed time after any one of the blades 422 passes once through the predetermined position every time the arbitrary blade 422 passes through the predetermined position a predetermined number of times.
- the reference blade passing time is calculated, and the angular velocity of the rotating body 42 is calculated based on the reference blade passing time and the number of times any one blade 422 has passed a predetermined position during the reference blade passing time.
- the angular velocity of the rotating body 42 can be accurately calculated without being affected by the shape error of the blade 422 or aging. Therefore, the combustion energy of each cylinder 4 of the engine body 1 calculated based on the angular velocity of the rotating body 42 or the combustion interval of each cylinder 4 can be calculated with higher accuracy.
- the amplifier unit 300 calculates the angular acceleration that is a differential value of the angular velocity based on the angular velocity of the rotating body 42, and the absolute value of the angular acceleration is equal to or less than a predetermined extreme value determination threshold value. Based on the angular velocity of the rotating body 42, the combustion energy of the cylinder 4 during the exhaust stroke is calculated. More specifically, in the amplifier unit 300 according to the present embodiment, when the previous value of the angular acceleration is a negative value, the absolute value of the angular acceleration is equal to or less than a predetermined extreme value determination threshold.
- the angular velocity of the rotating body 42 when the absolute value of the angular acceleration falls below a predetermined extreme value determination threshold is set as the maximum angular velocity.
- the combustion energy of the cylinder 4 during the exhaust stroke is calculated based on the minimum angular velocity and the maximum angular velocity.
- the combustion energy of each cylinder 4 can be accurately calculated from the angular velocity of the rotating body 42 calculated by the amplifier unit 300.
- the amplifier unit 300 is configured to calculate the combustion interval of the cylinder 4 based on a period from when the minimal angular velocity is set to when the minimal angular velocity is updated.
- the combustion interval of the cylinder 4 can be accurately calculated from the angular velocity of the rotating body 42 calculated by the amplifier unit 300.
- the housing 41 of the combustion state estimation device 40 is provided upstream of the exhaust aftertreatment device 33 in the exhaust flow direction, but may be provided downstream.
- the internal combustion engine 100 is not provided with a supercharger (supercharger or turbocharger).
- the internal combustion engine provided with the supercharger is also provided with the combustion state estimation device 40, and the internal combustion engine 100 The combustion state of each cylinder may be estimated.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Analytical Chemistry (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
Description
図1は、本発明の一実施形態による内燃機関100の概略構成図である。
図2Aは、ハウジング41及び回転体42の概略断面図である。図2Bは、回転体42の概略平面図である。
このように通過検出センサ301は、通過検出センサ301の検知部の前をブレード422が通過したことを正確に検出することができる。そのため、通過検出センサ301を用いた回転体42の角速度の算出方法の一例として、通過検出センサ301の前を各ブレード422のうちの任意の1つのブレード(以下「基準ブレード」という。)が通過してから、当該基準ブレードの次に通過検出センサ301の前を通過するブレードが通過するまでの時間間隔に基づいて、通過検出センサ301の前を各ブレード422が通過するごとに回転体42の角速度を算出する方法が挙げられる。
図5は、回転体42を一定の角速度で回転させた場合に、上述の算出方法で回転体42の角速度を算出したときの算出結果の一例を示す図である。図5において、横軸がブレード422の番号であり、縦軸は対応するブレード番号のブレード通過後の瞬間的な回転体42の角速度を示す。
そこで本実施形態では、上述した算出方法のように、通過検出センサ301の前を基準ブレードが通過してから当該基準ブレードの次に通過検出センサ301の前を通過するブレードが通過するまでの時間間隔、すなわち隣り合うブレード間を通過するのに要する時間に基づいて回転体42の角速度を算出するのではなく、通過検出センサ301の前を基準ブレードが通過してから当該基準ブレードが次に通過検出センサ301の前を通過するまでの時間間隔、すなわち回転体42が1回転するのに要する時間に基づいて回転体42の角速度を算出する。
そして発明者らの鋭意研究の結果、回転体42の角速度を正確に算出することができるようになると、算出した回転体42の角速度に基づいて、機関本体1の各気筒4の燃焼状態を正確に推定できるようになることがわかった。以下、この回転体42の角速度に基づいて、機関本体1の各気筒4の燃焼状態を推定する方法について説明する。
ハウジング41の内部では回転体42が回転することになるが、この回転体42の運動エネルギKEは、下記式(3)によって算出することができる。
このように、回転体42の運動エネルギを正確に算出することができると、算出した運動エネルギに基づいて、機関本体1が複数の気筒4を有している場合であれば、各気筒4の燃焼室6で燃料を燃焼させたときに生じる燃焼エネルギや各気筒4の燃焼間隔など、各気筒4の燃焼状態を推定することができる。また、機関本体1が単気筒の場合であれば、単気筒の燃焼室で燃料を燃焼させたときに生じる燃焼エネルギや燃焼間隔など、単気筒の燃焼状態を推定することができる。以下では、機関本体1が複数の気筒4を有している場合の、回転体42の運動エネルギと各気筒4の燃焼状態との関係について説明する。
また、機関本体1が単気筒の場合であれば、単気筒の燃焼エネルギ(燃焼トルク)や燃焼間隔といった単気筒の燃焼状態を随時算出することで、たとえば定常状態(負荷変動が無い状態)において燃焼状態に差が生じたときは、燃焼状態が一致するように燃料噴射量や吸気量、点火時期などの各気筒4の燃焼に関するパラメータを、電子制御ユニット200によってフィードバック制御やフィードフォワード制御することができる。
図8は、各気筒4の燃焼エネルギΔKE及び各気筒4の燃焼間隔Δtcomの算出方法について説明する図である。図中の横軸は機関本体1のクランク角を示している。図8中の実線は回転体42の運動エネルギを、破線は回転体42の角速度をそれぞれ示している。
以下、この本実施形態による通過検出センサ301の出力値を利用した機関本体1の各気筒4の燃焼エネルギ及び各気筒4の燃焼間隔の推定制御について説明する。
N=60/tm …(5)
1 機関本体
41 ハウジング
42 回転体
422 ブレード
300 アンプユニット(演算装置)
301 通過検出センサ
Claims (5)
- 気筒を有する機関本体の排気経路上に設けられたハウジングの内部に回転自在に収容されると共に、少なくとも1つのブレードを有して当該機関本体の気筒から排出される排気のエネルギによって回転駆動される回転体と、
前記ハウジングに設けられると共に、当該ハウジング内の所定位置を前記回転体のブレードが通過したことを検出する通過検出センサと、
前記通過検出センサの検出結果に基づいて、前記回転体の角速度を算出すると共に、当該回転体の角速度に基づいて、前記機関本体の気筒の燃焼エネルギ又は燃焼間隔の少なくとも一方を算出するように構成された演算装置と、
を備える燃焼状態推定装置。 - 前記演算装置は、
前記回転体の角速度に基づいて、当該角速度の微分値である角加速度を算出し、
前記角加速度の絶対値が所定の極値判定閾値以下になったときの前記回転体の角速度に基づいて、排気行程中の気筒の燃焼エネルギを算出するように構成される、
請求項1に記載の燃焼状態推定装置。 - 前記演算装置は、
前記角加速度の前回値が負の値であれば、前記角加速度の絶対値が所定の極値判定閾値以下になったときの前記回転体の角速度を極小角速度として設定し、
前記角加速度の前回値が正の値であれば、前記角加速度の絶対値が所定の極値判定閾値以下になったときの前記回転体の角速度を極大角速度として設定し、
前記極小角速度と前記極大角速度とに基づいて、排気行程中の気筒の燃焼エネルギを算出するように構成される、
請求項2に記載の燃焼状態推定装置。 - 前記演算装置は、
前記極小角速度が設定されてから当該極小角速度が更新されるまでの期間に基づいて、気筒の燃焼間隔を算出するように構成される、
請求項3に記載の燃焼状態推定装置。 - 前記演算装置は、
前記ブレードのうちの任意の1つのブレードが前記所定位置を一度通過してからの経過時間を、当該任意の1つのブレードが当該所定位置を所定回数通過するごとに基準ブレード通過時間として算出し、
当該基準ブレード通過時間と、当該基準ブレード通過時間の間に前記任意の1つのブレードが前記所定位置を通過した回数と、に基づいて、前記回転体の角速度を算出するように構成される、
請求項1から請求項4までのいずれか1つに記載の燃焼状態推定装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017555931A JP6490239B2 (ja) | 2015-12-16 | 2015-12-16 | 燃焼状態推定装置 |
| PCT/JP2015/085256 WO2017104029A1 (ja) | 2015-12-16 | 2015-12-16 | 燃焼状態推定装置 |
| EP15910719.2A EP3392491A4 (en) | 2015-12-16 | 2015-12-16 | DEVICE FOR ESTIMATING COMBUSTION CONDITION |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/085256 WO2017104029A1 (ja) | 2015-12-16 | 2015-12-16 | 燃焼状態推定装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017104029A1 true WO2017104029A1 (ja) | 2017-06-22 |
Family
ID=59056114
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/085256 WO2017104029A1 (ja) | 2015-12-16 | 2015-12-16 | 燃焼状態推定装置 |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3392491A4 (ja) |
| JP (1) | JP6490239B2 (ja) |
| WO (1) | WO2017104029A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002098584A (ja) * | 2000-09-22 | 2002-04-05 | Mitsubishi Heavy Ind Ltd | 翼振動計測方法及びこれを用いた翼振動監視システム |
| JP2008014656A (ja) * | 2006-07-03 | 2008-01-24 | Denso Corp | 回転速度検出装置 |
| JP2012132423A (ja) * | 2010-12-24 | 2012-07-12 | Toyota Motor Corp | 内燃機関の制御装置 |
| JP2015197074A (ja) * | 2014-04-01 | 2015-11-09 | トヨタ自動車株式会社 | 内燃機関の制御装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4513779B2 (ja) * | 2006-04-26 | 2010-07-28 | トヨタ自動車株式会社 | 内燃機関の排気浄化装置 |
| IT1400362B1 (it) * | 2010-06-03 | 2013-05-31 | Magneti Marelli Spa | Metodo di determinazione della velocita' di rotazione di un compressore in un motore a combustione interna |
| DE102011110669B4 (de) * | 2011-08-19 | 2023-05-11 | Testo SE & Co. KGaA | Verfahren und Messanordnung zur Bestimmung von spezifischen und/oder absoluten Emissionswerten für NOx und/oder CO2 bei einer Verbrennungsmaschine |
| JP2014231830A (ja) * | 2013-05-02 | 2014-12-11 | 株式会社電子応用 | エンジン制御装置 |
-
2015
- 2015-12-16 JP JP2017555931A patent/JP6490239B2/ja not_active Expired - Fee Related
- 2015-12-16 EP EP15910719.2A patent/EP3392491A4/en not_active Withdrawn
- 2015-12-16 WO PCT/JP2015/085256 patent/WO2017104029A1/ja active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002098584A (ja) * | 2000-09-22 | 2002-04-05 | Mitsubishi Heavy Ind Ltd | 翼振動計測方法及びこれを用いた翼振動監視システム |
| JP2008014656A (ja) * | 2006-07-03 | 2008-01-24 | Denso Corp | 回転速度検出装置 |
| JP2012132423A (ja) * | 2010-12-24 | 2012-07-12 | Toyota Motor Corp | 内燃機関の制御装置 |
| JP2015197074A (ja) * | 2014-04-01 | 2015-11-09 | トヨタ自動車株式会社 | 内燃機関の制御装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3392491A4 * |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3392491A4 (en) | 2019-08-14 |
| JP6490239B2 (ja) | 2019-03-27 |
| JPWO2017104029A1 (ja) | 2018-07-19 |
| EP3392491A1 (en) | 2018-10-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5328757B2 (ja) | エンジン制御装置 | |
| US20110172898A1 (en) | Internal combustion engine system control device | |
| KR101251516B1 (ko) | 엔진 시스템 및 이의 신호처리 방법 | |
| JP2005291182A (ja) | 失火検出装置 | |
| JP5446759B2 (ja) | エンジンの異常検出方法及び異常検出装置 | |
| KR102080959B1 (ko) | 내연 기관의 측정된 및 추정된 내부 실린더 압력 값에 기초하여 자기 점화를 검출하기 위한 방법 및 장치 | |
| JPH0270960A (ja) | 内燃機関の制御装置 | |
| JP2012193655A (ja) | エンジンの点火時期設定装置 | |
| EP3369918B1 (en) | Control device for internal combustion engine | |
| WO2017145863A1 (ja) | 内燃機関の制御装置 | |
| JP6490239B2 (ja) | 燃焼状態推定装置 | |
| TW200404954A (en) | Engine control device | |
| JP6490240B2 (ja) | 内燃機関 | |
| EP3348956B1 (en) | Rotation speed estimation device, multi-cylinder internal combustion engine, and device for controlling multi-cylinder internal combustion engine | |
| JP5246144B2 (ja) | 内燃機関の吸入空気量算出装置、内燃機関の制御装置 | |
| JP2018115966A (ja) | 回転軸の角度検出装置、又は角度検出方法 | |
| JP7240302B2 (ja) | エンジン試験システム | |
| JP6350591B2 (ja) | 内燃機関の制御装置 | |
| WO2019130584A1 (ja) | 内燃機関、過給機、及びサージング判定機能付きセンサ | |
| WO2019043853A1 (ja) | 内燃機関 | |
| WO2016157442A1 (ja) | 角速度推定装置、エネルギ推定装置及び気筒間バラツキ推定装置 | |
| JPH0242160A (ja) | 内燃機関の吸入空気量予測装置 | |
| JP2016089708A (ja) | エンジン | |
| JP2013155638A (ja) | 筒内圧センサの劣化検出装置 | |
| JPH0726584B2 (ja) | 内燃機関の燃料噴射量制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15910719 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2017555931 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2015910719 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2015910719 Country of ref document: EP Effective date: 20180716 |