WO2017017835A1 - Mouse device - Google Patents
Mouse device Download PDFInfo
- Publication number
- WO2017017835A1 WO2017017835A1 PCT/JP2015/071621 JP2015071621W WO2017017835A1 WO 2017017835 A1 WO2017017835 A1 WO 2017017835A1 JP 2015071621 W JP2015071621 W JP 2015071621W WO 2017017835 A1 WO2017017835 A1 WO 2017017835A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- mouse device
- amplitude
- unit
- plate
- drive signal
- Prior art date
Links
Images

























Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0354—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of 2D relative movements between the device, or an operating part thereof, and a plane or surface, e.g. 2D mice, trackballs, pens or pucks
Definitions
- the present invention relates to a mouse device.
- a tactile feedback type mouse device in which an actuator is arranged at the bottom of a casing to generate vibration in the casing.
- the actuator is disposed on the wall portion at the bottom of the casing inside the casing.
- the actuator is a linear electromagnetic actuator and has a fixed portion fixed to the housing, a movable portion, and an inertia weight attached to the upper end of the movable portion.
- the actuator vibrates in the thickness direction (Z-axis direction) of the bottom of the housing (see, for example, Patent Document 1).
- an object is to provide a mouse device that can provide a good tactile sensation.
- a mouse device includes a plate having a contact surface that is in contact with the surface of an object, a housing that exposes the contact surface to hold the plate, and is touched by a user's hand, and the contact surface
- a vibration element that generates vibrations
- a pressure detection unit that detects a pressing force that the plate is pressed by a reaction from the object
- a vibration signal that generates a natural vibration of an ultrasonic band on the contact surface.
- a drive control unit that sets an amplitude of the drive signal in accordance with the pressing force detected by the press detection unit, and the amplitude is used to increase the pressing force. Increased accordingly.
- a mouse device that can provide a good tactile sensation can be provided.
- FIG. 1 is a perspective view of a computer system including a mouse device according to an embodiment. It is a block diagram explaining the structure of the principal part in the main-body part of a computer system. It is a figure which shows the internal structure of the main-body part of PC of embodiment. It is a figure which shows the structure of the mouse device of embodiment. It is a figure explaining the 1st operation example of the mouse device of an embodiment.
- FIG. 10 shows a vibration pattern of a vibration element corresponding to the first operation example shown in FIG. 9. It is a figure which shows the data stored in memory. It is a flowchart which shows the process which an amplitude data output part performs. It is a figure explaining the 2nd operation example of the mouse device of an embodiment. The vibration pattern of the vibration element corresponding to the 2nd operation example shown in FIG. 13 is shown. It is a figure which shows the data stored in memory. It is a flowchart which shows the process which an amplitude data output part performs. It is a figure explaining the 3rd operation example of the mouse device of an embodiment. It is a figure explaining the 3rd operation example of the mouse device of an embodiment. FIG.
- FIG. 18 is a diagram illustrating a vibration pattern of a vibration element corresponding to the third operation example illustrated in FIG. 17. It is a figure which shows the data stored in memory. It is a flowchart which shows the process which an amplitude data output part performs. It is a figure explaining the 4th example of operation of mouse device 100 of an embodiment. The vibration pattern of the vibration element 140 corresponding to the 4th operation example shown in FIG. 22 is shown. This data represents the relationship between the pressing force and the amplification factor. It is a flowchart showing the process which the control part of a mouse
- FIG. 1 It is a figure which shows the main-body part of the computer system of the 2nd modification of embodiment. It is a figure which shows the mouse device of the 3rd modification of embodiment. It is a figure which shows the structure of the mouse device of the 3rd modification of embodiment. It is a figure which shows an electric current detection part. It is a figure which shows the relationship between the presence or absence of a press, and the voltage and electric current of a drive signal. An example of the data of the table format used when a pressing force calculation part calculates pressing force using ratio Ip / Vp is shown. It is a flowchart showing the process which the control part of the mouse device of the 3rd modification of embodiment performs.
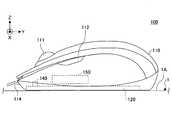
- FIG. 1 is a side view showing a mouse device 100 according to an embodiment.
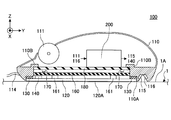
- FIG. 2 is a cross-sectional view of the mouse device 100 shown in FIG.
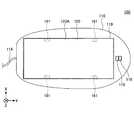
- FIG. 3 is a bottom view of the mouse device shown in FIG.
- FIG. 2 is a cross section parallel to the YZ plane passing through the center of the width in the X-axis direction of the mouse device 100 in FIG.
- the mouse device 100 includes a housing 110, a wheel 111, a left button 112, a cable 114, an LED (Light Emitting Diode) 115, a sensor 116, a plate 120, a double-sided tape 130, and a vibration element 140.
- a housing 110 a wheel 111, a left button 112, a cable 114, an LED (Light Emitting Diode) 115, a sensor 116, a plate 120, a double-sided tape 130, and a vibration element 140.
- the mouse device 100 further includes a contact sensor 150, a support plate 160, a pressure sensor 170, a substrate 180, and a control device 200.
- the mouse device 100 is a pointing device that is connected to an information processing device such as a PC (Personal Computer) and operates the position of a pointer displayed on a PC monitor.
- the mouse device 100 is an example of an input device.
- the mouse device 100 is disposed on the surface 1A of the object 1 such as a desk or a table.
- the surface 1A is a flat surface parallel to the XY plane in the XYZ coordinate system shown in FIGS.
- the user operates the position of the pointer by moving the mouse device 100 with respect to the surface 1A.
- the surface 1A may not be flat, and may not be a horizontal plane.
- the housing 110 is a mouse-type housing, and has an opening 110A in which the plate 120 is disposed on the surface (see FIG. 3) on the Z-axis negative direction side.
- the housing 110 holds a plate 120 disposed in the opening 110A, and the plate 120 is exposed on the surface of the housing 110 on the Z axis negative direction side.
- a wheel 111 is provided on the surface of the casing 110 on the positive side in the Z axis, and a left button 112 is provided on a side surface on the positive side in the X axis. Further, a contact sensor 150 is provided on the back side (inside the casing 110) of the side surface of the casing 110 on the X axis positive direction side. Further, an LED 115 and a sensor 116 are provided on the Y axis positive direction side of the plate 120 on the surface of the housing 110 on the Z axis negative direction side.
- a support plate 160, a pressure sensor 170, a substrate 180, and a control device 200 are provided inside the housing 110 inside the housing 110.
- the housing 110 has an engaging portion 110B inside, and the substrate 180 is fixed in a state of being engaged with the inside of the housing 110 by the engaging portion 110B.
- the drive control unit included in the control device 200 drives the vibration element 140 with a drive signal that causes the natural vibration of the ultrasonic band.
- the drive control of the vibration element 140 by the drive control unit of the control device 200 will be described later with reference to FIGS.
- the casing 110 has a shape that fits in the palm of the user except on the side where the opening 110A is formed.
- the wheel 111 is an operation unit used when scrolling up and down an image displayed on a PC monitor, for example.
- the left button 112 is a button that is pressed when performing selection or determination, for example.
- the mouse device 100 may have a right button provided on the side surface on the X axis negative direction side.
- the right button is, for example, a button that is pressed when displaying a menu on the monitor.
- the cable 114 is a cable for connecting the mouse device 100 to a PC, and has, for example, a USB (Universal Serial Bus) connector at the tip.
- USB Universal Serial Bus
- the LED 115 and the sensor 116 are an example of a movement detection unit that detects a movement direction and a movement amount of the mouse device 100.
- the sensor 116 is, for example, an image sensor, and detects the moving direction and moving amount of the mouse device 100 by reading a pattern on the surface of an object irradiated with laser light from the LED 115.
- the plate 120 is bonded to the housing 110 with a double-sided tape 130 so as to be exposed to the surface on the Z-axis negative direction side from an opening 110A provided on the surface on the Z-axis negative direction side of the housing 110. Since the plate 120 is located on the bottom surface of the mouse device 100, it can be handled as a bottom plate or a bottom panel.
- the plate 120 is a thin flat plate member that is rectangular in plan view, and is made of metal, resin, ceramic, or the like.
- a surface 120 ⁇ / b> A (surface on the negative Z-axis direction side) 120 ⁇ / b> A of the plate 120 is a surface that contacts the surface 1 ⁇ / b> A of the object 1.
- the vibration element 140 is bonded to the surface on the Z axis positive direction side, and four sides in the XY plan view are bonded to the casing 110 by the double-sided tape 130.
- the double-sided tape 130 only needs to be able to bond the four sides of the plate 120 to the housing 110, and does not need to be rectangular in a plan view.
- another panel or a protective film may be provided on the surface 120A of the plate 120.
- the surface 120A of the plate 120 comes into contact with the surface 1A of the object 1 via another panel or a protective film.
- the plate 120 vibrates when the vibration element 140 is driven in a state where the vibration element 140 is bonded to the surface on the positive side of the Z axis.
- the plate 120 is vibrated at the natural vibration frequency of the plate 120 to generate a standing wave in the plate 120.
- the vibration element 140 since the vibration element 140 is bonded to the plate 120, it is actually preferable to determine the natural vibration frequency in consideration of the weight of the vibration element 140 and the like.
- the vibration element 140 is bonded along the short side extending in the X-axis direction on the Y-axis negative direction side of the surface of the plate 120 on the Z-axis positive direction side.
- the vibration element 140 may be an element that can generate vibrations in an ultrasonic band.
- an element including a piezoelectric element such as a piezoelectric element can be used.
- a piezoelectric element is an element that vibrates in a three-dimensional direction.
- the vibration element 140 is driven by a drive signal output from the drive control unit of the control device 200.
- the amplitude (intensity) and frequency of vibration generated by the vibration element 140 are set by the drive signal. Further, on / off of the vibration element 140 is controlled by a drive signal.
- an ultrasonic band means a frequency band about 20 kHz or more, for example.
- the frequency at which the vibration element 140 vibrates is equal to the vibration frequency of the plate 120, so that the vibration element 140 is driven by a drive signal so as to vibrate at the natural frequency of the plate 120. .
- the contact sensor 150 is provided on the back side (inside the casing 110) of the side surface of the casing 110 on the X axis positive direction side, and is a sensor that detects the contact of the user's right thumb.
- a capacitance-type proximity sensor that detects a change in capacitance accompanying the approach of a human body can be used.
- the contact sensor 150 is an example of a contact detection unit.
- the support plate 160 is a flat member having four projecting portions 161. As shown in FIG. 3, two of the four protrusions 161 are disposed along the long side extending in the Y-axis direction at the end of the plate 120 on the X-axis positive direction side. The remaining two of the four protrusions 161 are disposed along the long side extending in the Y-axis direction at the end of the plate 120 on the X-axis negative direction side.
- Such a support plate 160 is made of metal or an insulator such as resin.
- the four projecting portions 161 may be formed integrally with the flat plate-like portion of the support plate 160, or may be attached to the flat plate-like portion.
- the ends of the four protrusions 161 on the negative side in the Z-axis direction are fixed to the surface of the plate 120 on the positive side in the Z-axis direction by, for example, bonding or screwing.
- the position of the protruding portion 161 in the Y-axis direction is matched with the position of the node of the natural vibration (standing wave) generated in the plate 120.
- a natural vibration (standing wave) is generated on the plate 120 so that the antinodes and nodes are aligned in the Y-axis direction.
- the position of the protrusion 161 in the Y-axis direction is made to coincide with the position of the node.
- the position of the protruding portion 161 in the Y-axis direction may be different from the position of the node.
- the pressing sensor 170 contacts the surface of the support plate 160 on the positive side of the Z axis.
- the support plate 160 is provided to avoid the vibration element 140 on the Z-axis positive direction side of the plate 120 and to transmit the stress that the plate 120 receives in the Z-axis positive direction to the pressure sensor 170. For this reason, the height of the protrusion 161 in the Z-axis direction is higher than the height (thickness) of the vibration element 140 in the Z-axis direction.
- the press sensor 170 is attached to the surface of the substrate 180 on the Z axis negative direction side.
- the pressure sensor 170 is provided to detect a change in force with which the user presses the mouse device 100 against the surface 1 ⁇ / b> A of the object 1.
- the pressing sensor 170 may be a sensor that is directly or indirectly connected to the plate 120 and outputs a voltage or current corresponding to the pressing force that the plate 120 receives from the object 1.
- a strain gauge type pressure sensor or a pressure sensor using a piezoelectric element such as a piezoelectric element may be used.
- the substrate 180 to which the pressure sensor 170 is attached is fixed to the housing 110 by the engaging portion 110B, when the user presses the mouse device 100 against the surface 1A of the object 1 in the negative Z-axis direction, the plate 120 Presses the support plate 160 in the positive Z-axis direction, and the press sensor 170 is pressed between the support plate 160 and the substrate 180.
- the pressure sensor 170 detects the pressing force that the plate 120 is pressed by the reaction from the surface 1A of the object 1 when the user presses the mouse device 100 against the surface 1A of the object 1 in the negative Z-axis direction. To do.
- the press sensor 170 is an example of a press detection unit.
- the substrate 180 is fixed to the housing 110 in a state of being engaged with an engaging portion 110B inside the housing 110.
- substrate 180 should just be fixed to the engaging part 110B by the double-sided tape, the adhesive agent, screwing, etc., for example.
- a pressure sensor 170 is fixed to the surface of the substrate 180 on the negative side of the Z axis.
- the substrate 180 is fixed to the housing 110 so that the plate 120 and the support plate 160 do not move due to a reaction force received from the object 1 when the user presses the mouse device 100 against the surface 1A of the object 1 in the negative Z-axis direction. Has been.
- the control device 200 is mounted on the surface of the substrate 180 on the Z axis positive direction side.
- the substrate 180 is, for example, an FR-4 (Flame Retardant type 4) standard wiring substrate.
- the drive control unit of the control device 200 drives the vibration element 140 to move the plate 120. Vibrate at ultrasonic frequency.
- the frequency of this ultrasonic band is a resonance frequency of a resonance system including the plate 120 and the vibration element 140 and causes the plate 120 to generate a standing wave.
- the mouse device 100 provides a tactile sensation to the user through the housing 110 by generating a standing wave in the ultrasonic band.
- the vibration element 140 when the vibration element 140 is driven in this way, if the user changes the force with which the mouse device 100 is pressed against the surface 1A of the object 1 in the negative direction of the Z-axis, the mouse device 100 is moved by the user's hand.
- the amplitude of the drive signal that drives the vibration element 140 is changed so that the tactile sensation provided to the sound is constant.
- the mouse device 100 drives the vibration element 140 so that the tactile sensation provided to the user's hand is constant.
- the amplitude of the drive signal to be increased is increased.
- the mouse device 100 generates a drive signal for driving the vibration element 140 so that the tactile sensation provided to the user's hand is constant. Decrease the amplitude. Note that the control of the amplitude of the drive signal with respect to such a pressing force will be described later with reference to FIGS.
- the pressing force applied to the plate 120 from the object 1 is detected by the pressing sensor 170 using the support plate 160 and the substrate 180.
- the pressing force applied to the plate 120 is detected by the pressing sensor 170.
- the structure which supports the plate 120 and the press sensor 170 may be what kind of structure.
- FIG. 4 is a diagram showing a wave front formed in parallel to the short side of the plate 120 among standing waves generated in the plate 120 by the natural vibration of the ultrasonic band
- FIG. B is a perspective view. 4A and 4B, XYZ coordinates similar to those in FIGS. 1 and 2 are defined. In FIGS. 4A and 4B, the amplitude of the standing wave is exaggerated for ease of understanding. In FIGS. 4A and 4B, the vibration element 140 is omitted.
- the natural frequency (resonance) of the plate 120 is obtained.
- the frequency f is expressed by the following equations (1) and (2). Since the standing wave has the same waveform in units of 1 ⁇ 2 period, the number of periods k takes values in increments of 0.5, which are 0.5, 1, 1.5, 2.
- 4A and 4B are waveforms when the number of periods k is 5, as an example.
- the cycle number k is 5.
- the natural frequency f is 33.5 [kHz].
- a drive signal having a frequency of 33.5 [kHz] may be used.
- the plate 120 is a flat plate-like member, when the vibration element 140 (see FIGS. 1 and 2) is driven to generate the natural vibration of the ultrasonic band, the plate 120 is shown in FIGS. In this way, a standing wave is generated on the surface.
- one vibration element 140 is bonded along the short side extending in the X-axis direction on the Y-axis negative direction side on the surface of the plate 120 on the Z-axis positive direction side.
- Two vibration elements 140 may be used.
- another vibration element 140 is bonded to the surface on the Z-axis positive direction side of the plate 120 along the short side extending in the X-axis direction on the Y-axis positive direction side.
- the two vibration elements 140 may be arranged so as to be axially symmetric with respect to a center line parallel to the two short sides of the plate 120.
- the two vibration elements 140 when the two vibration elements 140 are driven, they may be driven with the same phase when the number of periods k is an integer, and with opposite phases when the number of periods k is a decimal (a number including an integer part and a decimal part). It can be driven by.
- the position of the protrusion 161 of the support plate 160 in the Y-axis direction may be matched with the position of the natural vibration (standing wave) node generated on the plate 120 as shown in FIG.
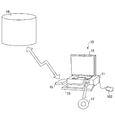
- FIG. 5 is a perspective view of a computer system including the mouse device 100 of the embodiment.
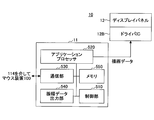
- a computer system 10 shown in FIG. 5 includes a main body 11, a display panel 12, a keyboard 13, a mouse device 100, and a modem 15.
- the main body 11, the display panel 12, and the keyboard 13 are handled as a PC.
- the main unit 11 includes a CPU (Central Processing Unit), an HDD (Hard Disk Drive), a disk drive, and the like.
- the display panel 12 displays various images and the like according to instructions from the main body unit 11.
- the display panel 12 may be a liquid crystal monitor, for example.
- the keyboard 13 is an input unit for inputting various information to the computer system 10.
- the mouse device 100 is an input unit that designates an arbitrary position such as a pointer displayed on the display panel 12.
- the modem 15 accesses an external database or the like and downloads a program or the like stored in another computer system.
- An application program for using the mouse device 100 is stored in a portable recording medium such as the disk 17 or downloaded from the recording medium 16 of another computer system using a communication device such as the modem 15, and the computer system 10. To be compiled.
- the application program for using the mouse device 100 may be stored in a computer-readable recording medium such as the disk 17.
- the computer-readable recording medium is limited to a portable recording medium such as a disk 17, an IC card memory, a magnetic disk such as a floppy (registered trademark) disk, a magneto-optical disk, a CD-ROM, or a USB (Universal Serial Bus) memory. It is not something.
- the computer-readable recording medium includes various recording media accessible by a computer system connected via a communication device such as a modem 15 or a LAN.
- FIG. 6 is a block diagram illustrating a configuration of a main part in the main body 11 of the computer system 10.
- the main body 11 includes a CPU 21 connected by a bus 20, a memory unit 22 including a RAM or a ROM, a disk drive 23 for the disk 17, and a hard disk drive (HDD) 24.
- the display panel 12, the keyboard 13, and the mouse device 100 are connected to the CPU 21 via the bus 20, but these may be directly connected to the CPU 21.
- the display panel 12 may be connected to the CPU 21 via a known graphic interface (not shown) that processes input / output image data.
- computer system 10 is not limited to the configuration shown in FIGS. 5 and 6, and various well-known elements may be added or alternatively used.
- FIG. 7 is a diagram illustrating an internal configuration of the main body 11 of the PC according to the embodiment.
- the main body unit 11 includes a control unit 510, an application processor 520, a communication unit 530, an amplitude data output unit 540, and a memory 550. Further, a display panel 12 and a driver IC 12B are connected to the main body 11.
- the control unit 510, the application processor 520, and the amplitude data output unit 540 represent functional blocks realized by a CPU (Central Processing Unit) chip included in the main body unit 11.
- CPU Central Processing Unit
- the display panel 12, the mouse device 100, and the modem 15 are omitted.
- the driver IC 12B, the control unit 510, the application processor 520, the communication unit 530, the amplitude data output unit 540, and the memory 550 will be described.
- the driver IC 12B is connected to the display panel 12, inputs the drawing data output from the application processor 520 to the display panel 12, and causes the display panel 12 to display an image based on the drawing data. As a result, a GUI operation unit or an image based on the drawing data is displayed on the display panel 12.
- the control unit 510 is a control unit that controls all processes executed by the main body unit 11. Here, in particular, a method of obtaining the position of the pointer displayed on the display panel 12 among the functions of the control unit 510 will be described.
- the control unit 510 obtains the position of the pointer displayed on the display panel 12 based on the data representing the movement amount and movement direction of the mouse device 100 input from the mouse device 100 via the communication unit 530.
- Control unit 510 is an example of a pointer control unit.
- the position of the symbol in the text displayed on the display panel 12 is specified by, for example, an OS (Operating System) installed in the PC.
- OS Operating System
- the symbol is a generic name including characters, numbers, pictograms, emoticons, and other symbols.
- the characters are characters used for writing hiragana, katakana, kanji, alphabets, and other languages.
- the position of the symbol for which the hyperlink is set is specified by the OS installed in the PC.
- a symbol for which a hyperlink is set is an example of a predetermined symbol.
- the OS determines whether the pointer is touching a symbol for which a hyperlink is set. When the pointer touches a symbol for which a hyperlink is set, the OS outputs a signal indicating that the pointer is touched.
- Application processor 520 performs processing for executing various applications of main unit 11.
- the communication unit 530 is an interface connected to the cable 114 when the main body unit 11 and the mouse device 100 are connected by the cable 114.
- the communication unit 530 is a communication unit for near field communication such as Bluetooth (registered trademark), for example.
- the amplitude data output unit 540 generates amplitude data representing the amplitude value of the drive signal used for driving the vibration element 140.
- the amplitude value is set according to the degree of temporal change in the position of the pointer operated by the mouse device 100.
- the amplitude data output from the amplitude data output unit 540 is data that becomes a drive signal for driving the vibration element 140 of the mouse device 100.
- the amplitude data output unit 540 is an example of a drive signal output unit.
- the drive control device 300 vibrates the plate 120 in order to change the dynamic friction force applied to the plate 120 when the mouse device 100 moves along the surface 1A of the object 1. Since the dynamic friction force is generated when the plate 120 is moving, the amplitude data output unit 540 is used to vibrate the vibration element 140 when the moving speed of the mouse device 100 exceeds a predetermined threshold speed. Outputs amplitude data.
- the amplitude value represented by the amplitude data output from the amplitude data output unit 540 is zero when the moving speed is less than the predetermined threshold speed, and is predetermined according to the moving speed when the moving speed is equal to or higher than the predetermined threshold speed. Is set to the amplitude value.
- the amplitude data output unit 540 outputs amplitude data when the control unit 510 touches a predetermined symbol that should generate vibration or is within a predetermined area.
- the amplitude data output unit 540 outputs the amplitude data of the vibration pattern assigned to the hyperlink. Output.
- the amplitude data output unit 540 outputs amplitude data of the vibration pattern assigned to the GUI operation unit or the like when the pointer is inside the display area such as the GUI operation unit or the like.
- the position on the display panel 12 such as a GUI operation unit to be displayed on the display panel 12 and an area for displaying other images is specified by area data representing the area.
- the area data exists for areas representing all GUI operation units and the like displayed on the display panel 12 in all applications.
- the amplitude data output unit 540 determines whether or not the position of the pointer input from the control unit 510 is within a predetermined region where vibration is to be generated, using the region data.
- Data that associates data representing the type of application, area data representing a GUI operation unit or the like on which an operation input is performed, and pattern data representing a vibration pattern is stored in the memory 550.
- the amplitude data output unit 540 outputs the amplitude data generated as described above to the mouse device 100 via the communication unit 530.
- the vibration element 140 is driven by a drive signal based on the amplitude data.
- the memory 550 stores data and programs necessary for the application processor 520 to execute the application, data and programs necessary for the communication processing by the communication unit 530, and the like.
- FIG. 8 is a diagram illustrating a configuration of the mouse device 100 according to the embodiment.
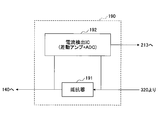
- the mouse device 100 includes a vibration element 140, an amplifier 141, a contact sensor 150, a press sensor 170, and a control device 200.
- the control device 200 includes a main control unit 210, a movement detection unit 220, a communication unit 230, a drive control unit 240, a memory 250, a switch 260, a sine wave generator 310, and an amplitude modulator 320.
- the other components of the mouse device 100 are omitted.
- the main control unit 210, the movement detection unit 220, and the drive control unit 240 are realized by, for example, an IC chip.
- the main control unit 210, the movement detection unit 220, and the drive control unit 240 may be configured with one IC chip, or may be configured with different IC chips.
- the main control unit 210 and the drive control unit 240 are examples of the control unit of the control device 200.
- the amplifier 141 is disposed between the amplitude modulator 320 and the vibration element 140 and drives the vibration element 140 by amplifying the drive signal output from the amplitude modulator 320.
- the main control unit 210 transmits data representing the movement direction and movement amount of the mouse device 100 detected by the movement detection unit 220 to the main body unit 11 via the communication unit 230. Further, the main control unit 210 transmits data representing the operation amount of the wheel 111 to the main body unit 11 via the communication unit 230.
- the main control unit 210 includes a contact determination unit 211 and a calculation unit 212.
- the contact determination unit 211 determines whether the user has touched the mouse device 100 based on the voltage value output from the contact sensor 150.
- the calculation unit 212 obtains a pressing force based on a signal representing the pressing force output from the pressing sensor 170, and determines an amplification factor for amplifying the amplitude value of the drive signal.
- the calculation unit 212 amplifies the amplitude data transmitted from the computer system 10 with the amplification factor, and outputs the amplified amplitude data to the drive control unit 240.
- the calculation unit 212 is an example of an amplification unit.
- the main control unit 210 controls the lighting of the LED 115. In addition, the main control unit 210 switches on / off the power source in response to an operation for switching on / off of the mouse device 100 input to the switch 260.
- the movement detection unit 220 detects the movement direction and movement amount of the mouse device 100 based on the data input from the sensor 116.
- the movement detection unit 220 analyzes the image input from the sensor 116 and detects the movement direction and movement amount of the mouse device 100.
- the communication unit 230 includes the main body unit 11 and the mouse. When the apparatus 100 is connected with the cable 114, the interface is connected to the cable 114. Further, when the main body unit 11 and the mouse device 100 are connected by wireless communication, the communication unit 230 is a communication unit for short-range communication such as Bluetooth, for example.
- the communication unit 230 transmits data representing the operation amount of the wheel 111 output from the main control unit 210 to the main body unit 11.
- the communication unit 230 transmits data representing the movement direction and the movement amount detected by the movement detection unit 220 to the main body unit 11.
- the communication unit 230 transmits the drive signal transmitted from the main body unit 11 to the drive control unit 240.
- the drive control unit 240 drives the vibration element 140 using the drive signal transmitted from the main body unit 11.
- the drive signal is data in which amplitude data for modulating the amplitude of the sine wave signal of the ultrasonic band input from the sine wave generator 310 is arranged in time series.
- the amplitude data is data in which data representing the amplitude of the modulated drive signal is arranged in time series.
- the memory 250 stores amplification factor data representing the amplification factor used when amplifying the amplitude value of the drive signal.
- the amplification factor data is read from the memory 250 when the main control unit 210 determines the amplification factor.
- the main control unit 210 determines the pressing force based on the output signal of the pressing sensor 170, and determines the amplification factor according to the pressing force.
- the switch 260 is a switch for performing an operation of switching the mouse device 100 on / off.
- the main control unit 210 switches the power on / off in accordance with an operation for switching on / off of the mouse device 100 input to the switch 260.
- the sine wave generator 310 generates a sine wave necessary for generating a drive signal for vibrating the plate 120 at the natural frequency. For example, when the plate 120 is vibrated at a natural frequency f of 33.5 [kHz], the frequency of the sine wave is 33.5 [kHz].
- the sine wave generator 310 inputs an ultrasonic band sine wave signal to the amplitude modulator 320.
- the amplitude modulator 320 modulates the amplitude of the sine wave signal input from the sine wave generator 310 using the amplitude data input from the drive control unit 240 to generate a drive signal.
- the amplitude modulator 320 modulates only the amplitude of the sine wave signal in the ultrasonic band input from the sine wave generator 310, and generates the drive signal without modulating the frequency and phase.
- the drive signal output by the amplitude modulator 320 is an ultrasonic band sine wave signal obtained by modulating only the amplitude of the ultrasonic band sine wave signal input from the sine wave generator 310. Note that when the amplitude data is zero, the amplitude of the drive signal is zero. This is equivalent to the amplitude modulator 320 not outputting a drive signal.
- the plate 120 drives the vibration element 140 by changing the amplitude of the drive signal in a single natural vibration mode in which the frequency of the drive signal is fixed. That is, in the mouse device 100, the plate 120 drives the vibration element 140 by changing the amplitude of the drive signal in a single natural vibration mode without changing the natural vibration mode.
- FIG. 9 is a diagram illustrating a first operation example of the mouse device 100 according to the embodiment.
- FIG. 10 shows a vibration pattern of the vibration element 140 corresponding to the first operation example shown in FIG.
- FIG. 9 shows text displayed on the display panel 12. A hyperlink is set in a part of the text.
- the text shown in FIG. 9 is quoted from the English version of Wikipedia (Olympic Games (May 26, 2015, 2:10 UTC) Wikipedia: The Free Encyclopedia. Retrieved from http://en.wikipedia.org/wiki / Olympic_Games).
- FIG. 9 a word for which no hyperlink is set is shown in black, and a word for which a hyperlink is set is shown in gray.
- the pointer 12A moves in the image displayed on the display panel 12 when the user moves the mouse device 100 on the surface 1A of the object 1 (see FIGS. 1 and 2).
- the pointer 12A touches “Ancient” of the word “Ancient Olympic Games” for which a hyperlink is set. More specifically, as indicated by an upward arrow, the pointer 12A approaches from the lower side of “Ancient” and starts to touch at time t11.
- the vibration pattern of the drive signal for driving the vibration element 140 changes from zero to A1 at time t11 as shown in FIG. 10, and a very short time has elapsed.
- This is a vibration pattern in which the amplitude becomes zero at time t12.
- the vibration pattern shown in FIG. 10 is represented by, for example, data in which data representing amplitudes are arranged in time series. That is, the vibration pattern shown in FIG. 10 is given by an envelope of a plurality of amplitude data representing amplitudes arranged in time series.
- the vibration element 140 When the vibration element 140 is driven with the vibration pattern as shown in FIG. 10, the natural vibration of the ultrasonic band is generated on the plate 120 at the time t11, and the natural vibration of the ultrasonic band is not generated at the time t12.
- the user who operates the mouse device 100 has a feeling that the mouse device 100 becomes slippery with respect to the surface 1A due to the decrease in the dynamic friction force at time t11, and the mouse device 100 is moved to the surface at time t12 due to the increase in the dynamic friction force. Get a feel that is less slippery than 1A.
- the mouse device 100 becomes slippery with respect to the surface 1A, and vibration does not occur at time t12 immediately after time t11. Then, the increase in the dynamic friction force makes it difficult for the mouse device 100 to slide with respect to the surface 1A.
- the mouse device 100 easily slides on the surface 1A for a moment, and immediately thereafter (time t12), the mouse device 100 slips on the surface 1A.
- time t12 the mouse device 100 slips on the surface 1A.
- the user's hand is provided with a tactile sensation as if the mouse device 100 hit the projection. Thereby, the user can perceive with tactile sensation that the pointer 12A has reached the word for which the hyperlink is set.
- the amplitude data output unit 540 of the main body 11 (see FIG. 5) of the computer system 10 transmits the amplitude data stored in the memory 550 to the mouse device 100. Then, the drive control unit 240 of the mouse device 100 outputs the amplitude data to the amplitude modulator 320, and the amplitude modulator 320 amplitude-modulates the ultrasonic band sine wave signal output from the sine wave generator 310 with the amplitude data. Thus, a drive signal is generated, and the vibration element 140 is driven by the drive signal.
- time t12 represents the timing at which the driving of the vibrating element 140 is turned off after the vibrating element 140 is driven at time t11. That is, the vibration element 140 is turned on during a period from time t11 to time t12.
- the period during which the vibration element 140 is turned on may be set as appropriate according to the application. For this reason, the timing of the time t12 with respect to the time t11 is determined by the period during which the vibration element 140 is turned on.
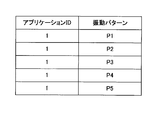
- FIG. 11 is a diagram showing data stored in the memory 550.
- the data stored in the memory 550 is data in which data representing the type of application is associated with pattern data representing a vibration pattern.
- ⁇ Shows application ID (Identification) as data indicating the type of application.
- P1 to P5 are shown as pattern data representing the vibration pattern.
- the pattern data representing the vibration pattern includes data representing the amplitude, and represents, for example, the vibration pattern shown in FIG.
- the application represented by the application ID includes any application that can be used on a smartphone terminal or a tablet computer.
- FIG. 12 is a flowchart showing processing executed by the amplitude data output unit 540.
- the process shown in FIG. 12 can be executed by installing an application program for using the mouse device 100 in the computer system 10 main body 11 (see FIG. 7).
- the OS (Operating System) of the main body 11 executes control for driving the main body 11 at every predetermined control cycle. For this reason, the amplitude data output unit 540 performs calculation every predetermined control period.
- the OS of the main body 11 determines whether or not the pointer 12A touches a word for which a hyperlink is set.
- the OS outputs a signal (hyperlink contact signal) indicating that the pointer is touched.
- Such processing is executed by the control unit 510 of the main body unit 11.
- Control unit 510 inputs a hyperlink contact signal to amplitude data output unit 540.
- the amplitude data output unit 540 starts the process when the main unit 11 is turned on.
- the amplitude data output unit 540 determines whether a hyperlink contact signal is input (step S1).
- the amplitude data output unit 540 determines that the hyperlink contact signal is input in step S1 (S1: YES)
- the amplitude data output unit 540 reads the amplitude data from the memory 550 and sets the amplitude value (step S2A).
- the amplitude data output unit 540 outputs the amplitude data in which the amplitude value is set in step S2A (step S3).
- amplitude data is transmitted from the amplitude data output unit 540 to the mouse device 100, and the amplitude modulator 320 modulates the amplitude of the sine wave output from the sine wave generator 310 to generate a drive signal, and the vibration element 140 is driven.
- step S1 determines whether hyperlink contact signal is input (S1: NO)
- the amplitude data output unit 540 sets the amplitude value to zero (step S2B).
- the amplitude data output unit 540 outputs amplitude data having an amplitude value of zero, and the amplitude modulator 320 generates a drive signal in which the amplitude of the sine wave output from the sine wave generator 310 is modulated to zero. . For this reason, in this case, the vibration element 140 is not driven.
- the pointer 12A touches a word for which a hyperlink is set
- the user's hand is provided with a tactile sensation as if the mouse device 100 hit the projection.
- the user can perceive with tactile sensation that the pointer 12A has reached the word for which the hyperlink is set.
- the pointer 12A can be set to any word other than the word for which the hyperlink is set.
- the vibration element 140 may be driven when the angle reaches.
- FIG. 13 is a diagram illustrating a second operation example of the mouse device 100 according to the embodiment.
- FIG. 14 shows a vibration pattern of the vibration element 140 corresponding to the second operation example shown in FIG.
- FIG. 13 shows icons displayed on the display panel 12.
- the pointer 12A passes through the icon 12C. More specifically, as indicated by a right-pointing arrow, it is assumed that the pointer 12A starts approaching and touching from the left side of the icon 12C at time t21 and finishes touching the icon 12C at time t22.
- the vibration pattern of the drive signal for driving the vibration element 140 changes from zero to B1 at time t21 and zero at time t22, as shown in FIG.
- the vibration pattern becomes
- the vibration element 140 When the vibration element 140 is driven in this way, the natural vibration of the ultrasonic band is generated on the plate 120 at the time t21, and the natural vibration of the ultrasonic band is not generated at the time t22.
- the mouse device 100 becomes slippery with respect to the surface 1A, and when the pointer 12A goes out of the display area of the icon 12C at time t22. As the dynamic friction force increases, the mouse device 100 is less likely to slip with respect to the surface 1A.
- the mouse device 100 becomes slippery with respect to the surface 1A, and a tactile sensation that makes the mouse device 100 slippery is provided to the user's hand. . Thereby, the user can perceive with tactile sensation that the pointer 12A has entered the display area of the icon 12C.
- the mouse device 100 is easily slipped with respect to the surface 1A, and a tactile sensation that makes the mouse device 100 slippery is provided to the user's hand. . Thereby, the user can perceive by touch that the pointer 12A is in the display area of the icon 12C.
- the mouse device 100 is difficult to slide with respect to the surface 1A, so that the mouse device 100 hits the protrusion on the user's hand. A tactile sensation is provided. As a result, the user can perceive the tactile sensation that the pointer 12A has moved away from the display area of the icon 12C.
- the amplitude data output unit 540 of the main body 11 (see FIG. 5) of the computer system 10 transmits the amplitude data stored in the memory 550 to the mouse device 100. Then, the drive control unit 240 of the mouse device 100 inputs the amplitude data to the amplitude modulator 320, and the amplitude modulator 320 generates a drive signal by amplitude-modulating the sine wave signal of the ultrasonic band with the amplitude data. The vibration element 140 is driven by this drive signal. As described above, drive control of the vibration element 140 is realized.
- FIG. 15 is a diagram showing data stored in the memory 550.
- the data stored in the memory 550 is data in which data representing the type of application, area data representing the display area of the icon 12C, and pattern data representing the vibration pattern are associated with each other.
- the area data exists for all GUI operation units displayed on the display panel 12, an area for displaying an image, or an area representing the entire page.
- ⁇ Shows the application ID as data indicating the type of application.
- equations f1 to f5 representing the coordinate values of the area in which the GUI operation unit or the like where the operation input is performed are displayed are shown.
- Q1 to Q5 are shown as pattern data representing the vibration pattern.
- the pattern data representing the vibration pattern includes data representing the amplitude, and represents, for example, the vibration pattern shown in FIG.
- the application represented by the application ID includes any application that can be used on a smartphone terminal or a tablet computer.
- FIG. 16 is a flowchart showing processing executed by the amplitude data output unit 540.
- the OS (Operating System) of the main body 11 executes control for driving the main body 11 at every predetermined control cycle. For this reason, the amplitude data output unit 540 performs calculation every predetermined control period.
- the OS of the main body 11 determines whether the pointer 12A is touching the display area of the icon 12C. When the pointer 12A touches the display area of the icon 12C, the OS outputs a signal indicating that the pointer 12A is touching (icon contact signal). Such processing is executed by the control unit 510 of the main body unit 11. Control unit 510 inputs an icon contact signal to amplitude data output unit 540.
- the amplitude data output unit 540 starts the process when the main unit 11 is turned on.
- the amplitude data output unit 540 acquires position data indicating the current position of the pointer 12A and area data associated with the current application type (step S21).
- the amplitude data output unit 540 determines whether or not the current position of the pointer 12A is within the region represented by any region data (step S22).
- the amplitude data output unit 540 determines in step S22 that the current position of the pointer 12A is within the region represented by any of the region data (S22: YES), the amplitude data output unit 540 reads the amplitude data from the memory 550 and determines the amplitude. A value is set (step S23A).
- the amplitude data included in the vibration pattern associated with the area data of the icon 12C is read and the amplitude value is set. .
- the amplitude data output unit 540 outputs the amplitude data set with the amplitude value in step S23A (step S24).
- the amplitude data is transmitted from the amplitude data output unit 540 to the mouse device 100, and the amplitude modulator 320 modulates the amplitude of the sine wave output from the sine wave generator 310 to generate a drive signal.
- the vibration element 140 is driven.
- step S22 if it is determined in step S22 that the current position of the pointer 12A is not within the region represented by any of the region data (S22: NO), the amplitude data output unit 540 sets the amplitude value to zero. (Step S23B).
- the amplitude data output unit 540 outputs amplitude data whose amplitude value is zero in step S24, and the amplitude modulator 320 is a drive signal obtained by modulating the amplitude of the sine wave output from the sine wave generator 310 to zero. Is generated. In this case, the vibration element 140 is not driven.
- the pointer 12A goes out of the display area of the icon 12C
- the user's hand is provided with a tactile sensation as if the mouse device 100 hit the projection, so that the user can move the pointer 12A to the icon 12C. It can be perceived by touch that the user has left the display area.
- the vibration element 140 may be driven according to the positional relationship with the pointer 12A.
- FIGS. 17 and 18 are diagrams illustrating a third operation example of the mouse device 100 according to the embodiment.
- FIG. 19 is a diagram showing a vibration pattern of the vibration element 140 corresponding to the third operation example shown in FIG.
- FIG. 17 illustrates a case where the image on the display panel 12 is scrolled.
- the image on the display panel 12 can be scrolled by moving the scroll bar 12D shown in FIG. 17 up and down.
- the mouse is drawn like a circle. A case where the image on the display panel 12 is scrolled by operating the device 100 will be described.
- the mouse device 100 When the mouse device 100 is operated to draw a circle as shown in FIG. 18 while pressing the Ctrl key, the image on the display panel 12 can be scrolled.
- the mouse device 100 when the mouse device 100 is operated so that the pointer 12A draws a circle clockwise as shown in FIG. 18 while pressing the Ctrl key, the image on the display panel 12 can be scrolled upward.
- the pointer 12A starts to move in a clockwise circle at time t31 while the Ctrl key is pressed, and stops at time t32.
- the vibration pattern of the drive signal for driving the vibration element 140 is as shown in FIG.
- the amplitude changes from zero to C1, and immediately after that, the amplitude becomes zero.
- the vibration element 140 is driven with the amplitude C2 ( ⁇ C1).
- the vibration element 140 When the vibration element 140 is driven in this way, the plate 120 is subjected to a natural vibration of the ultrasonic band at the time t31 when the scroll operation is started, and reaches a predetermined operation amount until the scroll operation is finished at the time t32. Each time it reaches, the vibration element 140 is driven with the amplitude C2 ( ⁇ C1).
- the mouse device 100 becomes slippery from the slippery state with respect to the surface 1A.
- the user's hand is provided with a tactile sensation as if the mouse device 100 hit the projection.
- the user can perceive that the scrolling has started by tactile sensation.
- the vibration element 140 is driven with the amplitude C2 every time the operation amount reaches a predetermined amount. Since the amplitude C2 is smaller than the amplitude C1, every time the operation amount reaches a predetermined amount, the user's hand is provided with a tactile sensation as if the mouse device 100 hit a small protrusion. Thereby, the user can perceive with tactile sensation that the operation amount of the scroll operation has reached a predetermined amount.
- FIG. 18 illustrates the case where the image on the display panel 12 can be scrolled upward by moving the pointer 12A clockwise, the pointer 12A draws a circle counterclockwise while pressing the Ctrl key.
- the mouse device 100 is operated as described above, the image on the display panel 12 can be scrolled downward.
- the amplitude data output unit 540 of the main body 11 (see FIG. 5) of the computer system 10 transmits the amplitude data stored in the memory 550 to the mouse device 100. Then, the drive control unit 240 of the mouse device 100 outputs the amplitude data to the amplitude modulator 320, and the amplitude modulator 320 generates a drive signal using the amplitude data, whereby the drive control of the vibration element 140 is realized. .
- FIG. 20 is a diagram showing data stored in the memory 550.
- the data stored in the memory 550 is data in which data representing the type of application, operation amount data representing a predetermined operation amount, and pattern data representing a vibration pattern are associated with each other.
- the operation amount data is data representing a predetermined operation amount that generates a vibration having an amplitude C2 shown in FIG.
- ⁇ Shows the application ID as data indicating the type of application.
- equations S1 to S5 representing a predetermined operation amount for generating the vibration with the amplitude C2 are shown.
- R1 to R5 are shown as pattern data representing the vibration pattern.
- the pattern data representing the vibration pattern includes data representing the amplitude, and represents, for example, the vibration pattern having the amplitudes C1 and C2 illustrated in FIG.
- FIG. 21 is a flowchart showing processing executed by the amplitude data output unit 540.
- the OS (Operating System) of the main body 11 executes control for driving the main body 11 at every predetermined control cycle. For this reason, the amplitude data output unit 540 performs calculation every predetermined control period.
- the amplitude data output unit 540 starts the process when the main unit 11 is turned on.
- the amplitude data output unit 540 determines whether or not the Ctrl key is pressed (step S31). This is because if the mouse device 100 is operated so that the pointer 12A draws a circle while the Ctrl key is pressed, the image on the display panel 12 can be scrolled upward or downward. Note that the process of step S31 is repeatedly executed until it is determined that the Ctrl key is pressed.
- step S32 determines whether scrolling has started. Whether or not scrolling has started can be determined based on whether or not the position of the pointer 12A has moved. Note that the process of step S32 is repeatedly executed until it is determined that scrolling has started.
- the amplitude data output unit 540 sets the amplitude value at the start of scrolling (step S33). For example, the amplitude C1 shown in FIG. 19 is set.
- the amplitude data output unit 540 outputs the amplitude data set with the amplitude value in step S33 (step S34).
- amplitude data is transmitted from the amplitude data output unit 540 to the mouse device 100, and the amplitude modulator 320 modulates the amplitude of the sine wave output from the sine wave generator 310 to generate a drive signal, and the vibration element 140 is driven.
- the vibration element 140 is driven with the amplitude C1 shown in FIG.
- the amplitude data output unit 540 determines whether or not the operation amount of the scroll operation has reached a predetermined operation amount (step S35).
- the predetermined operation amount is determined in advance by operation amount data shown in FIG.
- the amplitude data output unit 540 reads the amplitude data from the memory 550 and sets the amplitude value (step S36A).
- the amplitude data included in the vibration pattern associated with the application ID is read and the amplitude value is Is set.
- the amplitude data output unit 540 outputs the amplitude data for which the amplitude value is set in step S36A (step S37).
- amplitude data is transmitted from the amplitude data output unit 540 to the mouse device 100, and the amplitude modulator 320 modulates the amplitude of the sine wave output from the sine wave generator 310 to generate a drive signal, and the vibration element 140 is driven.
- step S35 determines whether the predetermined operation amount has been reached (S35: NO). If it is determined in step S35 that the predetermined operation amount has not been reached (S35: NO), the amplitude data output unit 540 sets the amplitude value to zero (step S36B).
- the amplitude data output unit 540 outputs amplitude data having an amplitude value of zero, and the amplitude modulator 320 generates a drive signal in which the amplitude of the sine wave output from the sine wave generator 310 is modulated to zero. . For this reason, in this case, the vibration element 140 is not driven.
- step S38 the amplitude data output unit 540 determines whether or not the scroll operation is completed. The scrolling operation ends when the position of the pointer 12A has not moved.
- step S38 If the amplitude data output unit 540 determines that the scroll operation has not ended (S38: NO), the flow returns to step S35.
- the vibration element 140 is driven with a large amplitude, and immediately after that, the vibration element 140 is turned off, so that the mouse device 100 becomes slippery from the slippery state with respect to the surface 1A.
- a tactile sensation as if the mouse device 100 hit a relatively large protrusion is provided to the user's hand.
- the user can perceive that the scrolling has started by tactile sensation.
- the vibration element 140 is driven with a small amplitude every time the operation amount reaches the predetermined amount. Therefore, every time the operation amount reaches the predetermined amount, the user's hand holds the mouse device. A tactile sensation such that 100 hits a relatively small protrusion is provided. Thereby, the user can perceive with tactile sensation that the operation amount of the scroll operation has reached a predetermined amount.
- the amplitude C1 and the amplitude C2 are not limited to the case where the amplitude C1 is larger than the amplitude C2, as described above, and the amplitude C1 and the amplitude C2 may be equal, or the amplitude C2 may be larger than the amplitude C1. .
- the scroll operation when the scroll operation is performed by operating the mouse device 100 so as to draw a circle with the Ctrl key pressed, the scroll operation is started and a predetermined operation is performed.
- the mode in which the vibration element 140 is driven when the amount is reached has been described.
- the vibration element 140 may be driven to provide a tactile sensation every time the amount of movement of the scroll bar 12D reaches a predetermined amount.
- the mode in which the vibration element 140 is switched on / off when the mouse device 100 is used to perform a scroll operation has been described.
- the vibration element 140 is switched on / off during an operation other than the scroll operation. You may do it.
- control processing performed by the mouse device 100 will be described with reference to FIGS. 22 to 25.
- the mouse device 100 when the main body 11 (see FIG. 5) outputs amplitude data in accordance with the position of the pointer 12A and the temporal change degree of the position, the mouse device 100 is pressed against the object 1 by the user. Based on the output signal of the pressure sensor 170, the amplitude data is amplified and the vibration element 140 is driven as described below.
- FIG. 22 is a diagram illustrating a fourth operation example of the mouse device 100 according to the embodiment.
- FIG. 23 shows a vibration pattern of the vibration element 140 corresponding to the fourth operation example shown in FIG.
- the vibration pattern of the vibration element 140 is a pattern represented by arranging the amplitude data of the drive signal for driving the vibration element 140 in time series.
- the fourth operation example shown in FIG. 22 is an operation example when the pointer 12A passes the icon 12C as in the second operation example shown in FIG. It is an operation example in the case where the amplitude data is amplified based on the output signal of the pressure sensor 170 when pressed.
- the pointer 12A starts to approach from the left side of the icon 12C and touches the mouse device 100 at time t42, and at time t43, the user presses the mouse device 100. It is assumed that the pressing force is further weakened and the user has finished touching the icon 12C at time t44.
- the force with which the user presses the mouse device 100 from time t41 to time t42 is constant, and the force with which the user presses the mouse device 100 from time t42 to time t43 is constant, from time t43 to time t44.
- the force with which the user presses the mouse device 100 is constant.
- the force with which the mouse device 100 is pressed from time t42 to time t43 is 2/3 of the force with which the mouse device 100 is pressed from time t41 to time t42, and from time t43 to time t44.
- the force with which the mouse device 100 is pressed is 1/3 of the force with which the mouse device 100 is pressed from time t41 to time t42.
- the vibration pattern of the drive signal for driving the vibration element 140 is as shown in FIG.
- the vibration pattern changes from zero to B3 at time t41, decreases from B3 to B2 at time t42, decreases from B2 to B1 at time t43, and becomes zero at time t44.
- the vibration element 140 When the vibration element 140 is driven in this way, the natural vibration of the ultrasonic band is generated on the plate 120 at the time t41, and the amplitude of the natural vibration is gradually reduced at the times t42 and t43. The natural vibration of the sonic band is not generated.
- the dynamic friction force decreases when the pressing force decreases, so the user presses the mouse device 100.
- the tactile sensation perceived by the hand is lightened.
- the tactile sensation that the user perceives with the hand that presses the mouse device 100 changes when the force that presses the mouse device 100 changes in this way, the tactile sensation that the user perceives with the hand may not be good.
- the mouse device 100 detects the pressing force applied to the mouse device 100 based on the output signal of the pressing sensor 170, and the tactile sensation perceived by the user with a hand is constant even when the pressing force changes.
- the amplitude value of the drive signal is amplified.
- the amplification factor is increased so that the tactile sensation perceived by the user is constant, and the amplitude value of the drive signal is increased.
- the pressing force applied to the mouse device 100 is reduced, the amplification factor is reduced so that the tactile sensation perceived by the user is constant, and the amplitude value of the drive signal is reduced.
- the amplitude data output from the main body 11 (see FIG. 5) is amplified using the amplification factor according to the pressing force applied to the mouse device 100.
- the amplitude data output from the main body 11 is set by the main body 11 in accordance with the position of the pointer 12A and the temporal change in position.
- FIGS. 22 and 23 the operation example in the case where the pressing force decreases stepwise has been described. On the contrary, when the pressing force increases stepwise, the tactile sensation that the user perceives with his / her hand. Since the amplification factor increases stepwise so that becomes constant, the amplitude data output from the main body 11 is amplified so as to increase stepwise.
- the amplification factor used when the mouse device 100 amplifies the drive signal may be a value of 1 or more or a value smaller than 1.
- the amplitude of the drive signal after amplification is equal to or greater than the amplitude of the drive signal before amplification.
- the amplitude of the drive signal after amplification is smaller than the amplitude of the drive signal before amplification.
- the amplitude of the drive signal used for driving the vibration element 140 may be changed as shown in FIG.
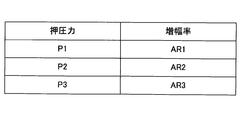
- FIG. 24 shows data representing the relationship between the pressing force and the amplification factor. Such data is stored in the memory 250 of the control device 200 of the mouse device 100.
- the pressing force data P1, P2, and P3 representing the pressing force are associated with the amplification factor data AR1, AR2, and AR3 representing the amplification factor, respectively.
- the pressing force data P1, P2, and P3 represent three levels of pressing force values obtained by classifying the pressing force detected by the pressing sensor 170 into three ranges, and P1 ⁇ P2 ⁇ P3. It is.
- the amplification factor values represented by the amplification factor data AR1, AR2, and AR3 satisfy AR1 ⁇ AR2 ⁇ AR3, and when the pressing force changes stepwise as P1, P2, and P3, the user manually The value is set so that the perceived tactile sensation is constant.
- the amplification factor is set so that a constant tactile sensation can be provided to the user's hand even if the pressing force changes to any one of P1, P2, and P3. More specifically, when the pressing force is P1, the vibration element 140 is driven with a drive signal obtained by amplifying the amplitude data with the amplification factor data AR1, and when the pressing force is P2, the amplitude data with the amplification factor data AR2. When the vibration element 140 is driven by the drive signal amplified by the driving signal, and when the pressing force is P3, the vibration element 140 is driven by the drive signal obtained by amplifying the amplitude data by the amplification factor data AR3. The amplification factor is set so that a constant tactile sensation can be provided to the hand.
- the vibration element is driven by the drive signal whose amplitude data is amplified by the amplification factor.
- the amplitude of the natural vibration of the ultrasonic band of the vibration element 140 is made constant.
- Making the amplitude of the natural vibration of the ultrasonic band of the vibration element 140 constant with respect to the change in the pressing force is realized by making the current value flowing through the vibration element 140 constant with respect to the change in the pressing force.
- the amplification factor that makes the tactile sensation perceived by the user's hand constant even when the pressing force changes can be set by performing an experiment in which the vibrating element 140 is vibrated while applying the pressing force to the mouse device 100, for example. Good. Moreover, you may obtain
- the pressing force data P1, P2, and P3 are values obtained by classifying the pressing forces detected by the pressing sensor 170 into three ranges and digitizing them. For this reason, strictly speaking, the minimum pressing force classified into the range of the pressing force data P1 and the maximum pressing force classified into the range of the pressing force data P1 provide a tactile sensation provided to the user's hand. There may be differences. The same applies to the pressing force data P2 and P3.
- providing a constant tactile sensation to the user's hand by classifying the pressing force into a plurality of ranges and setting an amplification factor for each range is a certain tactile sensation provided to the user's hand. It is to be within the range.
- FIG. 25 is a flowchart showing processing executed by the main control unit 210 of the mouse device 100.
- the main control unit 210 starts processing when the power of the mouse device 100 is turned on (start).
- the main control unit 210 determines whether or not the user's hand has touched the mouse device 100 (step S41). More specifically, the contact determination unit 211 determines whether the thumb of the right hand of the user has touched the mouse device 100 based on the voltage value output from the contact sensor 150. The process of step S41 is repeatedly executed until it is determined that the user's hand has touched the mouse device 100 (S41: YES).
- the main control unit 210 determines that the user's hand has touched the mouse device 100 (S41: YES)
- the main control unit 210 detects the pressing force applied to the mouse device 100 (step S42). More specifically, the calculation unit 212 calculates the pressing force based on a signal representing the pressing force output from the pressing sensor 170.
- the main control unit 210 obtains an amplification factor corresponding to the pressing force obtained in step S42 (step S43). More specifically, the calculation unit 212 obtains the amplification factor corresponding to the pressing force obtained in step S42 from the data shown in FIG.
- the main control unit 210 determines whether amplitude data is input from the computer system 10 (step S44). For example, as described with reference to FIGS. 9 to 21, when the pointer 12 ⁇ / b> A operated by the mouse device 100 is inside a predetermined area or the like that drives the vibration element 140, the computer system 10 starts the mouse device. This is because amplitude data is input to 100.
- the main control unit 210 determines that the amplitude data is input (S44: YES)
- the main control unit 210 amplifies the amplitude data with the amplification factor, and outputs the amplified amplitude data to the drive control unit 240 (step S45). More specifically, the calculation unit 212 amplifies the amplitude data input from the computer system 10 using the amplification factor obtained in step S43. As a result, the amplified amplitude data is output from the drive control unit 240, and the vibration element 140 is driven.
- the main control part 210 returns a flow to step S42, after finishing the process of step S45.
- Step S44 if the main control unit 210 determines that the amplitude data is not input (S44: NO), the flow proceeds to step S46. In this case, the vibration element 140 is not driven. In Step S44 after the vibration element 140 is driven in Step S45 and the flow is returned to Step S42, if it is determined that no amplitude data is input (S44: NO), the computer system 10 Since the amplitude data is not input, the vibration element 140 is not driven.
- the main control unit 210 determines whether or not the user's hand has touched the mouse device 100 (step S46). This is to determine whether or not to continue the process.
- the main control unit 210 determines that the user's hand has touched the mouse device 100 (S46: YES)
- the main control unit 210 returns the flow to step S42. This is because the pressing force is detected again to obtain the amplification factor.
- the main control unit 210 ends the flow (end). This is because the mouse device 100 is not operated.
- the main control unit 210 calculates the pressing force from the output signal of the pressing sensor 170 by executing the above-described control process, calculates the amplification factor corresponding to the pressing force, and is input from the computer system 10. Amplify the amplitude data. Then, the amplitude data amplified by the main control unit 210 is output from the drive control unit 240, and the vibration element 140 is driven.
- the mouse device 100 becomes slippery with respect to the surface 1A.
- the amplification factor corresponding to the pressing force is set based on the data representing the relationship between the pressing force and the amplification factor shown in FIG.
- the amplitude of the vibration is kept constant, and the ease of sliding with respect to the surface 1A of the mouse device 100 is kept constant. This is because, even when the pressing force is reduced, the amplification factor is lowered to provide a constant tactile sensation to the user's hand, so that the vibration amplitude of the vibration element 140 is kept constant.
- the amplification factor corresponding to the pressing force is set based on the data representing the relationship between the pressing force and the amplification factor shown in FIG.
- the amplitude of the vibration of the mouse device 100 is kept constant, and the ease of sliding with respect to the surface 1A of the mouse device 100 is kept constant. This is because, even when the pressing force is reduced, the amplification factor is lowered to provide a constant tactile sensation to the user's hand, so that the vibration amplitude of the vibration element 140 is kept constant.
- the mouse device 100 is less likely to slip with respect to the surface 1A due to an increase in dynamic friction force.
- the mouse device 100 becomes slippery with respect to the surface 1A, and a tactile sensation that makes the mouse device 100 slippery is provided to the user's hand. . Thereby, the user can perceive with tactile sensation that the pointer 12A has entered the display area of the icon 12C.
- the force for pressing the mouse device 100 changes when the pointer 12A is within the display area of the icon 12C, it corresponds to the pressing force based on the data representing the relationship between the pressing force and the amplification factor shown in FIG. Since the amplification factor is set, the slipperiness with respect to the surface 1A of the mouse device 100 is kept constant.
- the mouse device 100 is kept slippery with respect to the surface 1A, and even if the force for pressing the mouse device 100 changes, the user's hand has a tactile sensation that makes the mouse device 100 slippery. And a certain tactile sensation is provided. Thereby, the user can perceive that the pointer 12A is in the display area of the icon 12C with a tactile sensation, and a good tactile sensation is provided to the user's hand even if the pressing force changes.
- the mouse device 100 is difficult to slide with respect to the surface 1A, so that the mouse device 100 hits the protrusion on the user's hand.
- a tactile sensation is provided.
- the user can perceive the tactile sensation that the pointer 12A has moved away from the display area of the icon 12C.
- the tactile sensation is provided to the user in the same manner as in the operation example shown in FIG.
- the amplitude data output unit 540 of the main body 11 (see FIG. 5) of the computer system 10 sends the amplitude data corresponding to the position of the pointer 12A and the degree of change from the memory 550. Read out and transmit to the mouse device 100.
- the main control unit 210 of the mouse device 100 detects the pressing force according to the output signal of the pressing sensor 170, and the main control unit 210 reads the amplification factor according to the pressing force from the memory 250. Then, the main control unit 210 amplifies the amplitude data transmitted from the computer system 10 and outputs the amplified amplitude data to the drive control unit 240.
- the drive controller 240 inputs the amplitude data to the amplitude modulator 320, and the amplitude modulator 320 generates a drive signal by amplitude-modulating the sine wave signal of the ultrasonic band with the amplitude data.
- the vibration element 140 is driven by this drive signal. As described above, drive control of the vibration element 140 is realized.
- the amplification pressure data AR1, AR2 are obtained by dividing the pressures detected by the pressure sensor 170 into three ranges and digitizing the three levels of pressure values P1, P2, P3, respectively.
- the form in which AR3 is associated has been described.
- the pressing force may be classified into two or more stages and may be classified into more stages than three stages.
- an amplification factor is obtained using a mathematical formula that increases the amplification factor as the pressing force increases, and the amplitude data of the drive signal is amplified with the obtained amplification factor. May be.
- the mouse device 100 since the mouse device 100 according to the embodiment generates the natural vibration of the ultrasonic band on the plate 120 according to the position of the pointer 12A and the degree of movement of the position, it is favorable for the user by using the squeeze effect. A tactile sensation can be provided.
- the amplification factor corresponding to the pressing force is based on the data representing the relationship between the pressing force and the amplification factor shown in FIG. Since it is set, the ease of sliding with respect to the surface 1A of the mouse device 100 is kept constant.
- the user's hand is provided with a tactile sensation that makes the mouse device 100 slippery and provides a certain tactile sensation. Therefore, even if the pressing force changes, a good tactile sensation is provided to the user's hand.
- the mouse device 100 that can provide a good tactile sensation.
- amplitude data is generated on the main body 11 side using the data stored in the memory 550, the amplitude data is transmitted to the mouse device 100, and the mouse device 100 amplifies the amplitude data using the amplification factor.
- the vibration element 140 is driven by the amplified drive signal.
- the vibration element 140 may be driven based on the moving direction and the moving amount detected by the movement detecting unit 220 by the mouse device 100.
- the main body 11 does not have to be involved in the drive control of the vibration element 140.
- the vibration element 140 may be driven in a predetermined pattern when the mouse device 100 moves in a specific movement direction, or the vibration element 140 may be driven in a predetermined pattern when the mouse device 100 moves by a specific movement amount. It may be driven by.
- the amplification factor corresponding to the pressing force applied to the mouse device 100 is obtained, the amplitude data input from the main body 11 to the mouse device 100 is amplified using the amplification factor, and the vibration element is obtained using the amplified drive signal.
- the mode of driving 140 has been described.
- amplitude data corresponding to the pressing force applied to the mouse device 100 may be prepared in the memory 550 of the main body 11. More specifically, a plurality of types of vibration pattern data shown in FIGS. 11, 15, and 20 having different amplitude data according to the level of the pressing force are prepared, and the pressing force applied to the mouse device 100 is set to the main body. The vibration pattern of amplitude data corresponding to the pressing force may be output to the mouse device 100. In this case, the main control unit 210 of the mouse device 100 does not have to amplify the amplitude data input from the main body unit 11.
- the same data as the table format data shown in FIGS. 11, 15, and 20 is stored in the memory 250 of the mouse device 100, and amplitude data is generated on the mouse device 100 side.
- FIG. 9 is used for explanation.
- an identifier is assigned to a word for which a hyperlink is set.
- an identifier assigned by the OS can be used.
- FIG. 26 is a diagram illustrating data stored in the memory 250 according to the first modification of the embodiment.
- the data stored in the memory 250 is data in which data representing the type of application, link ID, and pattern data representing a vibration pattern are associated with each other.
- the link ID is an identifier assigned to a word for which a hyperlink is set.
- the link ID is output by the control unit 510 as an example of an identifier output unit.
- the amplitude data output unit 540 of the main body unit 11 transmits the link ID of the hyperlink touched by the pointer 12A to the mouse device 100, and the drive control unit 240 refers to the data (FIG. 26) stored in the memory 250, and the application ID The vibration pattern corresponding to the link ID is read out. Then, the amplitude data included in the vibration pattern is output to the amplitude modulator 320. As a result, the vibration element 140 is driven by the drive signal output from the amplitude modulator 320.
- table format data including vibration patterns may be stored in the memory 250 of the mouse device 100.
- the driving method of the vibration element 140 is the same as in the first operation example described above, according to the first modification, it is possible to provide the mouse device 100 that can provide a good tactile sensation.
- FIG. 27 is a diagram illustrating a main body 11A of a computer system 10A according to a second modification of the embodiment.
- the main body 11A has a configuration in which the amplitude data output unit 540 is removed from the main body 11 shown in FIG.
- the main body 11A is used in combination with the mouse device 100 of the first modification.
- the main unit 11A transmits the hyperlink contact signal and the coordinates of the pointer 12A to the mouse device 100. Then, the mouse device 100 drives the vibration element 140 by executing the process shown in FIG. 12 based on the hyperlink contact signal. In addition, the mouse device 100 executes the process shown in FIG. 16 using the coordinates of the pointer 12A. Further, the mouse device 100 executes the process shown in FIG. 21 using the coordinates of the pointer 12A.
- the driving method of the vibration element 140 is the same as that of the first modified example described above, according to the second modified example, it is possible to provide the mouse device 100 that can provide a good tactile sensation.
- FIG. 28 is a diagram illustrating a mouse device 100A according to a third modification of the embodiment.
- the mouse device 100A has a configuration in which the support plate 160 and the pressure sensor 170 are removed from the mouse device 100 shown in FIGS.
- the mouse device 100 ⁇ / b> A includes a current detection unit that detects a current flowing through the vibration element 140 instead of the press sensor 170.
- FIG. 29 is a diagram illustrating a configuration of a mouse device 100A according to a third modification of the embodiment.
- the mouse device 100A includes a vibration element 140, an amplifier 141, a contact sensor 150, a current detection unit 190, and a control device 200A.
- the control device 200A includes a main control unit 210A, a movement detection unit 220, a communication unit 230, a drive control unit 240, a memory 250, a switch 260, a sine wave generator 310, and an amplitude modulator 320.
- the main control unit 210A and the drive control unit 240 are examples of the control unit of the control device 200A.
- the main control unit 210A includes a contact determination unit 211, a calculation unit 212, a phase correction unit 213, an amplitude ratio calculation unit 214, and a pressing force calculation unit 215.
- the main control unit 210A adds a phase correction unit 213, an amplitude ratio calculation unit 214, and a pressing force calculation unit 215 to the main control unit 210 shown in FIG. 31, and the calculation unit 212 is calculated by the pressing force calculation unit 215.
- the amplitude data is amplified using an amplification factor corresponding to the pressing force.
- the current detection unit 190 detects the voltage across the resistor using, for example, a resistor inserted in series in the wiring connecting the amplitude modulator 320 and the amplifier 141, and uses the voltage across the resistor as the resistance value of the resistor. Any sensor may be used as long as the current value is obtained by dividing by.
- the phase correction unit 213 detects the voltage waveform of the drive signal output from the amplitude modulator 320. In the mouse device 100A, when the pressing force applied to the plate 120 is obtained, the voltage / current ratio of the drive signal is used. A phase correction unit 213 is provided to match the phase of the voltage and current when determining the ratio of the voltage and current of the drive signal.
- the phase correction unit 213 detects the voltage of the drive signal, corrects the phase of the voltage, and matches the phase of the current of the drive signal.
- the drive signal input from the amplitude modulator 320 to the phase correction unit 213 is a very small amount of current among the drive signals output from the amplitude modulator 320, and the drive signal input from the amplitude modulator 320 to the amplifier 141. Does not affect the signal.
- the phase correction unit 213 includes, for example, an A / D (Analog-to-Digital) converter that digitally converts the voltage of the drive signal, and a buffer that shifts the phase of the voltage of the digitally converted drive signal. Correct.
- the phase correction unit 213 corrects the phase of the voltage waveform of the drive signal and outputs the voltage waveform of the drive signal with the phase corrected.
- phase correction unit 213 corrects the phase of the voltage of the drive signal is that the vibration element 140 is a capacitive element, and thus there may be a phase difference between the voltage and current of the drive signal.
- the correction amount by which the phase correction unit 213 corrects the phase of the voltage of the drive signal may be obtained in advance through experiments and / or simulations. Note that when the phase difference between the voltage and current of the drive signal does not occur, the main control unit 210 may not include the phase correction unit 213. Here, a mode in which the phase correction unit 213 corrects the phase of the voltage of the drive signal will be described. However, the phase correction unit 213 is provided between the current detection unit 190 and the amplitude ratio calculation unit 214, and the phase correction unit 213 may correct the phase of the current of the drive signal to match the phase of the voltage of the drive signal.
- the amplitude ratio calculation unit 214 includes an A / D converter that digitally converts the current data input from the current detection unit 190.
- the current data input from the current detection unit 190 is an analog value.
- the amplitude ratio calculation unit 214 calculates a ratio between the current represented by the digitally converted current data and the voltage of the drive signal whose phase is corrected by the phase correction unit 213, and outputs the ratio to the pressing force calculation unit 215.
- the amplitude ratio calculation unit 214 calculates the ratio between the current waveform of the current represented by the digitally converted current data and the voltage waveform of the voltage of the drive signal whose phase has been corrected. More specifically, the amplitude ratio calculation unit 214 divides the current waveform of the current represented by the digitally converted current data by the voltage waveform of the voltage of the drive signal whose phase has been corrected, to thereby calculate the current and voltage. Calculate the ratio.
- the ratio calculated by the amplitude ratio calculation unit 214 is an example of a first ratio.
- the pressing force calculation unit 215 calculates the pressing force applied to the plate 120 using the ratio calculated by the amplitude ratio calculation unit 214.
- the pressing force calculation unit 215 subtracts the ratio calculated by the amplitude ratio calculation unit 214 from the ratio between the current and voltage of the drive signal when the plate 120 is not pressed, and subtracts a predetermined coefficient from the value obtained by subtraction. To calculate the pressing force.
- the pressing force calculated by the pressing force calculation unit 215 is an example of the pressing degree.
- the ratio between the current and voltage of the drive signal in a state where the plate 120 is not pressed is an example of the second ratio. A specific method for calculating the pressing force and the predetermined coefficient will be described later.
- FIG. 30 is a diagram illustrating the current detection unit 190.
- the current detection unit 190 includes a resistor 191 and a current detection IC (Integrated Circuit) 192.
- the resistor 191 is inserted in series with the wiring connecting the amplitude modulator 320 and the amplifier 141.
- the current detection IC 192 has a differential amplifier and (Analog to Digital Converter), detects the voltage across the resistor 191, and divides the voltage across the resistor 191 to obtain the current value. Data representing the obtained current value is transmitted to the amplitude ratio calculation unit 214.
- FIG. 31 is a diagram showing the relationship between the presence or absence of pressing and the voltage and current of the drive signal.
- a mouse device 100A shown in cross section in (A1) and (B1) of FIG. 31 includes a current detection unit 190 that detects the current of the drive signal, a drive control unit 240, a sine wave generator 310, and an amplitude modulator 320.
- (A1) in FIG. 31 is a case where there is no pressing, and the user's hand is only touching the mouse device 100A and is not pressing the mouse device 100A.
- FIG. 31 (B1) shows a case where there is a press, and the user's hand presses the mouse device 100A in the negative Z-axis direction.
- the waveform shown on the plate 120 of the mouse device 100A shown in cross section schematically shows the natural vibration of the ultrasonic band.
- the amplitude of the natural vibration of the ultrasonic band generated on the plate 120 of the mouse device 100A is smaller than that without the pressure, as shown in FIG. This is because it is pressed by the user's hand.
- the voltage Vp2 of the drive signal at this time is equal to the voltage Vp1 in the case of no pressing as shown in (B2) of FIG. 31, but the current Ip2 of the drive signal is as shown in (B3) of FIG.
- the current is smaller than the current Ip1 when no pressure is applied, and the amplitude becomes smaller.
- the current flowing through the vibration element 140 is substantially proportional to the vibration amplitude of the vibration element 140.
- the amplitude of the vibration of the vibration element 140 decreases when the plate 120 is pressed and the natural vibration amplitude of the ultrasonic band decreases. This means that it becomes smaller.
- FIG. 32 shows an example of table format data used when the pressing force calculation unit 215 calculates the pressing force using the ratio Ip / Vp.
- the ratio difference (Ip0 / Vp0 ⁇ Ip / Vp) obtained by subtracting the ratio Ip / Vp when the pressing force is applied from the ratio Ip0 / Vp0 when the pressing force is 0 g (zero gram), the pressing conversion coefficient PF, Is the data associated with.
- the ratio difference (Ip0 / Vp0 ⁇ Ip / Vp) obtained by subtracting the ratio Ip / Vp when the pressing force is applied from the ratio Ip0 / Vp0 when the pressing force is 0 g (zero gram) is used as follows. For reasons like this. That is, if a difference in which the ratio Ip / Vp is changed by applying the pressing force is obtained on the basis of the ratio Ip0 / Vp0 when the pressing force is 0 g, the ratio Ip / Vp corresponding to the pressing force applied to the plate 120 is obtained. This is because the change can be obtained.
- the pressing force Fm can be obtained by the following equation (3).
- Fm PF ⁇ (Ip0 / Vp0 ⁇ Ip / Vp) (3) That is, the pressing conversion coefficient PF is a coefficient for obtaining the pressing force Fm from the ratio difference (Ip0 / Vp0 ⁇ Ip / Vp).
- the pressing conversion coefficient PF is set to a constant value (25).
- the value of the pressing conversion coefficient PF may be set to an optimum value according to the dimension of the plate 120 and / or the value of Young's modulus.
- data indicating the ratio Ip0 / Vp0 when the pressing force is 0 g (zero gram) may be stored in the memory 250.
- the calculation unit 212 obtains the amplification factor corresponding to the pressing force calculated by the pressing force calculation unit 215 as described above from the data representing the relationship between the pressing force and the amplification factor shown in FIG. 24, and amplifies the amplitude data. do it.
- FIG. 33 is a flowchart showing processing executed by the main control unit 210A of the mouse device 100A.
- the main control unit 210A starts processing when the power of the mouse device 100A is turned on (start).
- the main control unit 210A determines whether or not the user's hand has contacted the mouse device 100A (step S51). More specifically, the contact determination unit 211 determines whether or not the thumb of the right hand of the user touches the mouse device 100A based on the voltage value output from the contact sensor 150. Note that the process of step S51 is repeatedly executed until it is determined that the user's hand has contacted the mouse device 100A (S51: YES).
- the main control unit 210A determines that the user's hand has contacted the mouse device 100A (S51: YES)
- the main control unit 210A drives the vibration element 140 (step S52). This is because the pressing force is detected from the current flowing through the vibration element 140.
- the vibration element 140 since the vibration element 140 is driven to detect the pressing force, for example, the amplitude data of the drive signal may be the minimum amplitude necessary for detecting the pressing force. The minimum amplitude data may be such that little touch is provided to the user's hand.
- Such amplitude data may be stored in the memory 250 as a default value for detecting the pressing force, and the main control unit 210A may read it from the memory 250 in step S52.
- the main control unit 210A detects the pressing force from the current flowing through the vibration element 140 (step S53). Specifically, first, the phase correction unit 213 corrects the phase of the voltage waveform of the drive signal, and outputs the voltage waveform of the drive signal with the phase corrected. Next, the amplitude ratio calculation unit 214 calculates a ratio between the current represented by the digitally converted current data and the voltage of the drive signal whose phase is corrected by the phase correction unit 213. Then, the pressing force calculation unit 215 calculates the pressing force applied to the plate 120 using the ratio calculated by the amplitude ratio calculation unit 214.
- the main control unit 210A sets the amplitude data to zero and sets the vibration element 140 after detecting the pressing force from the current flowing through the vibration element 140 in step S53 and before proceeding to the process of step S54. It may be in a non-driven state (off state).
- the main control unit 210A obtains an amplification factor corresponding to the pressing force obtained in step S53 (step S54). More specifically, the calculation unit 212 obtains the amplification factor corresponding to the pressing force obtained in step S53 from the data shown in FIG.
- the main control unit 210A determines whether amplitude data is input from the computer system 10 (step S55). For example, as described with reference to FIGS. 9 to 21, when the pointer 12 ⁇ / b> A operated by the mouse device 100 ⁇ / b> A is inside a predetermined area or the like that drives the vibration element 140, the computer system 10 starts the mouse device. This is because the amplitude data is input to 100A.
- the main control unit 210A determines that the amplitude data is input (S55: YES)
- the main control unit 210A amplifies the amplitude data with the amplification factor, and outputs the amplified amplitude data to the drive control unit 240 (step S56). More specifically, the calculation unit 212 amplifies the amplitude data input from the computer system 10 using the amplification factor obtained in step S54. As a result, the amplified amplitude data is output from the drive control unit 240, and the vibration element 140 is driven by the amplified amplitude data.
- Main control part 210A will return a flow to Step S52, after finishing processing of Step S56.
- step S55 if the main control unit 210A determines that amplitude data is not input (S55: NO), the flow proceeds to step S57. In this case, the vibration element 140 is not driven. In step S55 after the vibration element 140 is driven in step S56 and the flow is returned to step S52, if it is determined that no amplitude data is input (S55: NO), the computer system 10 Since the amplitude data is not input, the vibration element 140 is not driven.
- the main control unit 210A determines whether or not the user's hand has contacted the mouse device 100A (step S57). This is to determine whether or not to continue the process.
- step S52 the flow returns to step S52. This is because the pressing force is detected again to obtain the amplification factor.
- the main control unit 210A ends the flow (end). This is because the mouse device 100A is not operated.
- the main control unit 210 ⁇ / b> A obtains the pressing force from the current value of the vibration element 140 by executing the above-described control processing, obtains the amplification factor corresponding to the pressing force, and is input from the computer system 10. Amplify the amplitude data.
- the amplitude data amplified by the main control unit 210A is output from the drive control unit 240, and the vibration element 140 is driven.
- the mouse device 100 that can provide a good tactile sensation is provided, similarly to the mouse device 100 of the embodiment (see FIGS. 1 to 25). Can do.
- the mouse device 100A according to the third modified example of the embodiment does not include the pressing sensor 170, and can determine the pressing force applied to the plate 120 based on the current flowing through the vibration element 140. Compared to the mouse device 100 (see FIGS. 1 to 25), the number of parts can be reduced.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- User Interface Of Digital Computer (AREA)
- Position Input By Displaying (AREA)
Abstract
The purpose of the present invention is to provide a mouse device which is capable of providing a desirable tactile sensation. Provided is a mouse device, comprising: a plate, further comprising a contact face which makes contact with a surface of an object; a casing which retains the plate and exposes the contact face, and which a user touches with a hand; an oscillation element which causes the contact face to emit oscillations; a pressure detection unit which detects a pressure by which the plate is pressed by a reaction from the object; and a drive control unit which drives the oscillation element with a drive signal which causes the contact face to emit ultrasonic characteristic oscillations, and which sets the amplitude of the drive signal according to the pressure which is detected by the pressure detection unit. The amplitude is increased according to an increase in the pressure.
Description
本発明は、マウス装置に関する。
The present invention relates to a mouse device.
従来より、筐体の底部にアクチュエータを配置し、筐体に振動を発生させる、触感フィードバック型のマウス装置がある。アクチュエータは、筐体の内部で、筐体の底部の壁部に配置されている。アクチュエータは、リニア電磁アクチュエータであり、筐体に固定される固定部と、可動部と、可動部の上端に取り付けられる慣性おもりとを有する。アクチュエータは、筐体の底部の厚さ方向(Z軸方向)に振動する(例えば、特許文献1参照)。
Conventionally, there is a tactile feedback type mouse device in which an actuator is arranged at the bottom of a casing to generate vibration in the casing. The actuator is disposed on the wall portion at the bottom of the casing inside the casing. The actuator is a linear electromagnetic actuator and has a fixed portion fixed to the housing, a movable portion, and an inertia weight attached to the upper end of the movable portion. The actuator vibrates in the thickness direction (Z-axis direction) of the bottom of the housing (see, for example, Patent Document 1).
ところで、従来のマウス装置は、上述のようなリニア電磁アクチュエータで筐体の全体を振動させているため、触感が良好ではない。
By the way, since the conventional mouse device vibrates the whole case with the linear electromagnetic actuator as described above, the tactile sensation is not good.
そこで、良好な触感を提供できるマウス装置を提供することを目的とする。
Therefore, an object is to provide a mouse device that can provide a good tactile sensation.
本発明の実施の形態のマウス装置は、物体の表面に接する接触面を有するプレートと、前記接触面を表出させて前記プレートを保持し、利用者が手で触れる筐体と、前記接触面に振動を発生させる振動素子と、前記プレートが前記物体からの反作用によって押圧される押圧力を検出する押圧検出部と、前記接触面に超音波帯の固有振動を発生させる駆動信号で前記振動素子を駆動する駆動制御部であって、前記押圧検出部によって検出される前記押圧力に応じて前記駆動信号の振幅を設定する、駆動制御部とを含み、前記振幅は、前記押圧力の増大に応じて増大される。
A mouse device according to an embodiment of the present invention includes a plate having a contact surface that is in contact with the surface of an object, a housing that exposes the contact surface to hold the plate, and is touched by a user's hand, and the contact surface A vibration element that generates vibrations, a pressure detection unit that detects a pressing force that the plate is pressed by a reaction from the object, and a vibration signal that generates a natural vibration of an ultrasonic band on the contact surface. A drive control unit that sets an amplitude of the drive signal in accordance with the pressing force detected by the press detection unit, and the amplitude is used to increase the pressing force. Increased accordingly.
良好な触感を提供できるマウス装置を提供することができる。
A mouse device that can provide a good tactile sensation can be provided.
以下、本発明のマウス装置を適用した実施の形態について説明する。
Hereinafter, an embodiment to which the mouse device of the present invention is applied will be described.
<実施の形態>
図1は、実施の形態のマウス装置100を示す側面図である。図2は、図1に示すマウス装置100の断面図である。図3は、図1に示すマウス装置の底面図である。 <Embodiment>
FIG. 1 is a side view showing amouse device 100 according to an embodiment. FIG. 2 is a cross-sectional view of the mouse device 100 shown in FIG. FIG. 3 is a bottom view of the mouse device shown in FIG.
図1は、実施の形態のマウス装置100を示す側面図である。図2は、図1に示すマウス装置100の断面図である。図3は、図1に示すマウス装置の底面図である。 <Embodiment>
FIG. 1 is a side view showing a
以下では、図1乃至図3に示す直交座標系であるXYZ座標系を用いて説明する。図2は、図1におけるマウス装置100のX軸方向の幅の中心を通るYZ平面に平行な断面である。
Hereinafter, description will be made using the XYZ coordinate system which is the orthogonal coordinate system shown in FIGS. FIG. 2 is a cross section parallel to the YZ plane passing through the center of the width in the X-axis direction of the mouse device 100 in FIG.
マウス装置100は、筐体110、ホイール111、左ボタン112、ケーブル114、LED(Light Emitting Diode)115、センサ116、プレート120、両面テープ130、及び振動素子140を含む。
The mouse device 100 includes a housing 110, a wheel 111, a left button 112, a cable 114, an LED (Light Emitting Diode) 115, a sensor 116, a plate 120, a double-sided tape 130, and a vibration element 140.
マウス装置100は、さらに、接触センサ150、支持板160、押圧センサ170、基板180、及び及び制御装置200を含む。
The mouse device 100 further includes a contact sensor 150, a support plate 160, a pressure sensor 170, a substrate 180, and a control device 200.
マウス装置100は、PC(Personal Computer)のような情報処理装置に接続され、PCのモニタに表示されるポインタの位置を操作するポインティングデバイスである。また、マウス装置100は、入力装置の一例である。
The mouse device 100 is a pointing device that is connected to an information processing device such as a PC (Personal Computer) and operates the position of a pointer displayed on a PC monitor. The mouse device 100 is an example of an input device.
マウス装置100は、デスク又はテーブル等の物体1の表面1Aに配置される。表面1Aは、図1及び図2に示すXYZ座標系におけるXY平面に平行な平坦面である。利用者は、表面1Aに対してマウス装置100を移動することにより、ポインタの位置を操作する。なお、表面1Aは平坦ではなくてもよく、また、水平面ではなくてもよい。
The mouse device 100 is disposed on the surface 1A of the object 1 such as a desk or a table. The surface 1A is a flat surface parallel to the XY plane in the XYZ coordinate system shown in FIGS. The user operates the position of the pointer by moving the mouse device 100 with respect to the surface 1A. Note that the surface 1A may not be flat, and may not be a horizontal plane.
筐体110は、マウス型の筐体であり、Z軸負方向側の面(図3参照)側に、プレート120を配設する開口部110Aを有する。筐体110は、開口部110Aに配設されるプレート120を保持し、プレート120は筐体110のZ軸負方向側の面に表出している。
The housing 110 is a mouse-type housing, and has an opening 110A in which the plate 120 is disposed on the surface (see FIG. 3) on the Z-axis negative direction side. The housing 110 holds a plate 120 disposed in the opening 110A, and the plate 120 is exposed on the surface of the housing 110 on the Z axis negative direction side.
筐体110のZ軸正方向側の面には、ホイール111が設けられており、X軸正方向側の側面には、左ボタン112が設けられている。また、筐体110のX軸正方向側の側面の裏側(筐体110の内部)には、接触センサ150が設けられている。また、筐体110のZ軸負方向側の面のプレート120のY軸正方向側には、LED115とセンサ116が設けられている。
A wheel 111 is provided on the surface of the casing 110 on the positive side in the Z axis, and a left button 112 is provided on a side surface on the positive side in the X axis. Further, a contact sensor 150 is provided on the back side (inside the casing 110) of the side surface of the casing 110 on the X axis positive direction side. Further, an LED 115 and a sensor 116 are provided on the Y axis positive direction side of the plate 120 on the surface of the housing 110 on the Z axis negative direction side.
また、筐体110の内部では、プレート120のZ軸正方向側に支持板160、押圧センサ170、基板180、及び制御装置200が設けられている。筐体110は、内部に係合部110Bを有し、基板180は係合部110Bによって筐体110の内部に係合した状態で固定されている。
Also, inside the housing 110, a support plate 160, a pressure sensor 170, a substrate 180, and a control device 200 are provided on the positive side of the plate 120 in the Z-axis positive direction. The housing 110 has an engaging portion 110B inside, and the substrate 180 is fixed in a state of being engaged with the inside of the housing 110 by the engaging portion 110B.
制御装置200に含まれる駆動制御部は、振動素子140を超音波帯の固有振動が生じる駆動信号で駆動する。制御装置200の駆動制御部による振動素子140の駆動制御については、図10乃至図21を用いて後述する。
The drive control unit included in the control device 200 drives the vibration element 140 with a drive signal that causes the natural vibration of the ultrasonic band. The drive control of the vibration element 140 by the drive control unit of the control device 200 will be described later with reference to FIGS.
筐体110は、開口部110Aが形成される側以外では、利用者の手のひらに収まるような形状を有する。
The casing 110 has a shape that fits in the palm of the user except on the side where the opening 110A is formed.
ホイール111は、マウス装置100がPCに接続される場合は、例えば、PCのモニタに表示される画像等を上下にスクロールする際に用いる操作部である。
When the mouse device 100 is connected to a PC, the wheel 111 is an operation unit used when scrolling up and down an image displayed on a PC monitor, for example.
左ボタン112は、例えば、選択又は決定を行う際に押すボタンである。なお、図1及び図2には示さないが、マウス装置100は、X軸負方向側の側面に設けられる右ボタンを有していてもよい。右ボタンは、例えば、モニタにメニューを表示させる際に押すボタンである。
The left button 112 is a button that is pressed when performing selection or determination, for example. Although not shown in FIGS. 1 and 2, the mouse device 100 may have a right button provided on the side surface on the X axis negative direction side. The right button is, for example, a button that is pressed when displaying a menu on the monitor.
ケーブル114は、マウス装置100をPCに接続するケーブルであり、先端には、例えば、USB(Universal Serial Bus)コネクタを有する。
The cable 114 is a cable for connecting the mouse device 100 to a PC, and has, for example, a USB (Universal Serial Bus) connector at the tip.
LED115とセンサ116は、マウス装置100の移動方向と移動量を検出する移動検出部の一例である。センサ116は、例えば、イメージセンサであり、LED115からレーザ光が照射される物体の表面の模様等を読み取ることにより、マウス装置100の移動方向と移動量を検出する。
The LED 115 and the sensor 116 are an example of a movement detection unit that detects a movement direction and a movement amount of the mouse device 100. The sensor 116 is, for example, an image sensor, and detects the moving direction and moving amount of the mouse device 100 by reading a pattern on the surface of an object irradiated with laser light from the LED 115.
プレート120は、筐体110のZ軸負方向側の面に設けられる開口部110AからZ軸負方向側の面に表出するように、両面テープ130によって筐体110に接着されている。プレート120は、マウス装置100の底面に位置するため、ボトムプレート又はボトムパネルとして取り扱うこともできる。
The plate 120 is bonded to the housing 110 with a double-sided tape 130 so as to be exposed to the surface on the Z-axis negative direction side from an opening 110A provided on the surface on the Z-axis negative direction side of the housing 110. Since the plate 120 is located on the bottom surface of the mouse device 100, it can be handled as a bottom plate or a bottom panel.
プレート120は、平面視で長方形の薄い平板状の部材であり、金属、樹脂、又はセラミック等で作製される。プレート120の表面(Z軸負方向側の面)120Aは、物体1の表面1Aに当接する面である。
The plate 120 is a thin flat plate member that is rectangular in plan view, and is made of metal, resin, ceramic, or the like. A surface 120 </ b> A (surface on the negative Z-axis direction side) 120 </ b> A of the plate 120 is a surface that contacts the surface 1 </ b> A of the object 1.
プレート120は、Z軸正方向側の面に振動素子140が接着され、XY平面視における四辺が両面テープ130によって筐体110に接着されている。なお、両面テープ130は、プレート120の四辺を筐体110に接着できればよく、平面視で矩形環状である必要はない。
In the plate 120, the vibration element 140 is bonded to the surface on the Z axis positive direction side, and four sides in the XY plan view are bonded to the casing 110 by the double-sided tape 130. The double-sided tape 130 only needs to be able to bond the four sides of the plate 120 to the housing 110, and does not need to be rectangular in a plan view.
なお、プレート120の表面120Aに、さらに別なパネル又は保護膜等が設けられていてもよい。このような場合には、プレート120の表面120Aは、さらに別なパネル又は保護膜等を介して物体1の表面1Aに接触することになる。
In addition, another panel or a protective film may be provided on the surface 120A of the plate 120. In such a case, the surface 120A of the plate 120 comes into contact with the surface 1A of the object 1 via another panel or a protective film.
プレート120は、Z軸正方向側の面に振動素子140が接着された状態で、振動素子140が駆動されることによって振動する。実施の形態では、プレート120の固有振動周波数でプレート120を振動させて、プレート120に定在波を生じさせる。ただし、プレート120には振動素子140が接着されているため、実際には、振動素子140の重さ等を考慮した上で、固有振動周波数を決めることが好ましい。
The plate 120 vibrates when the vibration element 140 is driven in a state where the vibration element 140 is bonded to the surface on the positive side of the Z axis. In the embodiment, the plate 120 is vibrated at the natural vibration frequency of the plate 120 to generate a standing wave in the plate 120. However, since the vibration element 140 is bonded to the plate 120, it is actually preferable to determine the natural vibration frequency in consideration of the weight of the vibration element 140 and the like.
振動素子140は、プレート120のZ軸正方向側の面において、Y軸負方向側において、X軸方向に伸延する短辺に沿って接着されている。振動素子140は、超音波帯の振動を発生できる素子であればよく、例えば、ピエゾ素子のような圧電素子を含むものを用いることができる。圧電素子は、3次元方向に振動する素子である。
The vibration element 140 is bonded along the short side extending in the X-axis direction on the Y-axis negative direction side of the surface of the plate 120 on the Z-axis positive direction side. The vibration element 140 may be an element that can generate vibrations in an ultrasonic band. For example, an element including a piezoelectric element such as a piezoelectric element can be used. A piezoelectric element is an element that vibrates in a three-dimensional direction.
振動素子140は、制御装置200の駆動制御部から出力される駆動信号によって駆動される。振動素子140が発生する振動の振幅(強度)及び周波数は駆動信号によって設定される。また、振動素子140のオン/オフは駆動信号によって制御される。
The vibration element 140 is driven by a drive signal output from the drive control unit of the control device 200. The amplitude (intensity) and frequency of vibration generated by the vibration element 140 are set by the drive signal. Further, on / off of the vibration element 140 is controlled by a drive signal.
なお、超音波帯とは、例えば、約20kHz以上の周波数帯をいう。実施の形態のマウス装置100では、振動素子140が振動する周波数は、プレート120の振動数と等しくなるため、振動素子140は、プレート120の固有振動数で振動するように駆動信号によって駆動される。
In addition, an ultrasonic band means a frequency band about 20 kHz or more, for example. In the mouse device 100 of the embodiment, the frequency at which the vibration element 140 vibrates is equal to the vibration frequency of the plate 120, so that the vibration element 140 is driven by a drive signal so as to vibrate at the natural frequency of the plate 120. .
接触センサ150は、筐体110のX軸正方向側の側面の裏側(筐体110の内部)に設けられており、利用者の右手の親指の接触を検出するセンサである。接触センサ150は、例えば、人体の接近に伴う静電容量の変化を検出する静電容量型の近接センサを用いることができる。接触センサ150は、接触検出部の一例である。
The contact sensor 150 is provided on the back side (inside the casing 110) of the side surface of the casing 110 on the X axis positive direction side, and is a sensor that detects the contact of the user's right thumb. As the contact sensor 150, for example, a capacitance-type proximity sensor that detects a change in capacitance accompanying the approach of a human body can be used. The contact sensor 150 is an example of a contact detection unit.
支持板160は、4つの突出部161を有する平板状の部材である。図3に示すように、4つの突出部161のうちの2つは、プレート120のX軸正方向側の端部において、Y軸方向に伸延する長辺に沿って配設されている。また、4つの突出部161のうちの残りの2つは、プレート120のX軸負方向側の端部において、Y軸方向に伸延する長辺に沿って配設されている。
The support plate 160 is a flat member having four projecting portions 161. As shown in FIG. 3, two of the four protrusions 161 are disposed along the long side extending in the Y-axis direction at the end of the plate 120 on the X-axis positive direction side. The remaining two of the four protrusions 161 are disposed along the long side extending in the Y-axis direction at the end of the plate 120 on the X-axis negative direction side.
このような支持板160は、金属製又は樹脂等の絶縁体製である。4つの突出部161は、支持板160の平板状の部分と一体的に形成されていてもよく、平板状の部分に取り付けられていてもよい。4つの突出部161のZ軸負方向側の端部は、プレート120のZ軸正方向側の表面に、例えば、接着又はねじ止め等によって固定されている。
Such a support plate 160 is made of metal or an insulator such as resin. The four projecting portions 161 may be formed integrally with the flat plate-like portion of the support plate 160, or may be attached to the flat plate-like portion. The ends of the four protrusions 161 on the negative side in the Z-axis direction are fixed to the surface of the plate 120 on the positive side in the Z-axis direction by, for example, bonding or screwing.
ここでは、一例として、4つの突出部161のZ軸負方向側の端部がプレート120のZ軸正方向側の表面に固定されている形態について説明する。しかしながら、支持板160の突出部161がプレート120に対して押圧された状態で、支持板160とプレート120の位置関係が固定されていれば、4つの突出部161のZ軸負方向側の端部は、プレート120に固定されていなくてもよい。
Here, as an example, a description will be given of a form in which the ends of the four projecting portions 161 on the Z-axis negative direction side are fixed to the surface of the plate 120 on the Z-axis positive direction side. However, if the positional relationship between the support plate 160 and the plate 120 is fixed in a state where the protrusion 161 of the support plate 160 is pressed against the plate 120, the end of the four protrusions 161 on the negative side of the Z axis The part may not be fixed to the plate 120.
突出部161のY軸方向における位置は、プレート120に生じる固有振動(定在波)の節の位置に一致させてある。プレート120には、Y軸方向に腹と節が並ぶように固有振動(定在波)を発生させる。プレート120に発生させる定在波への影響を最小限に留め、定在波の振幅をより大きくするために、突出部161のY軸方向における位置を節の位置に一致させている。なお、定在波への影響を考慮する必要がない場合には、突出部161のY軸方向における位置は、節の位置と異なっていてもよい。
The position of the protruding portion 161 in the Y-axis direction is matched with the position of the node of the natural vibration (standing wave) generated in the plate 120. A natural vibration (standing wave) is generated on the plate 120 so that the antinodes and nodes are aligned in the Y-axis direction. In order to minimize the influence on the standing wave generated in the plate 120 and increase the amplitude of the standing wave, the position of the protrusion 161 in the Y-axis direction is made to coincide with the position of the node. When it is not necessary to consider the influence on the standing wave, the position of the protruding portion 161 in the Y-axis direction may be different from the position of the node.
支持板160のZ軸正方向側の面には、押圧センサ170が接触する。支持板160は、プレート120のZ軸正方向側で振動素子140を避け、プレート120がZ軸正方向に受ける応力を押圧センサ170に伝達するために設けられている。このため、突出部161のZ軸方向の高さは、振動素子140のZ軸方向の高さ(厚さ)よりも高い。
The pressing sensor 170 contacts the surface of the support plate 160 on the positive side of the Z axis. The support plate 160 is provided to avoid the vibration element 140 on the Z-axis positive direction side of the plate 120 and to transmit the stress that the plate 120 receives in the Z-axis positive direction to the pressure sensor 170. For this reason, the height of the protrusion 161 in the Z-axis direction is higher than the height (thickness) of the vibration element 140 in the Z-axis direction.
押圧センサ170は、基板180のZ軸負方向側の面に取り付けられている。押圧センサ170は、利用者がマウス装置100を物体1の表面1Aに押圧する力の変化を検出するために設けられている。
The press sensor 170 is attached to the surface of the substrate 180 on the Z axis negative direction side. The pressure sensor 170 is provided to detect a change in force with which the user presses the mouse device 100 against the surface 1 </ b> A of the object 1.
押圧センサ170は、プレート120に直接的又は間接的に接続され、プレート120が物体1から受ける押圧力に応じた電圧又は電流を出力するセンサであればよい。押圧センサ170としては、例えば、歪みゲージ式の圧力センサ、又は、ピエゾ素子のような圧電素子を用いた圧力センサを用いればよい。
The pressing sensor 170 may be a sensor that is directly or indirectly connected to the plate 120 and outputs a voltage or current corresponding to the pressing force that the plate 120 receives from the object 1. As the pressure sensor 170, for example, a strain gauge type pressure sensor or a pressure sensor using a piezoelectric element such as a piezoelectric element may be used.
押圧センサ170が取り付けられている基板180は、係合部110Bによって筐体110に固定されているため、利用者がマウス装置100を物体1の表面1AにZ軸負方向に押圧すると、プレート120が支持板160をZ軸正方向に押圧し、押圧センサ170は、支持板160と基板180との間で押圧される。
Since the substrate 180 to which the pressure sensor 170 is attached is fixed to the housing 110 by the engaging portion 110B, when the user presses the mouse device 100 against the surface 1A of the object 1 in the negative Z-axis direction, the plate 120 Presses the support plate 160 in the positive Z-axis direction, and the press sensor 170 is pressed between the support plate 160 and the substrate 180.
押圧センサ170は、このように利用者がマウス装置100を物体1の表面1AにZ軸負方向に押圧する際に、プレート120が物体1の表面1Aからの反作用によって押圧される押圧力を検出する。押圧センサ170は、押圧検出部の一例である。
The pressure sensor 170 detects the pressing force that the plate 120 is pressed by the reaction from the surface 1A of the object 1 when the user presses the mouse device 100 against the surface 1A of the object 1 in the negative Z-axis direction. To do. The press sensor 170 is an example of a press detection unit.
基板180は、筐体110の内部にある係合部110Bに係合した状態で筐体110に固定されている。基板180は、例えば、両面テープ、接着剤、ねじ止め等によって係合部110Bに固定されていればよい。
The substrate 180 is fixed to the housing 110 in a state of being engaged with an engaging portion 110B inside the housing 110. The board | substrate 180 should just be fixed to the engaging part 110B by the double-sided tape, the adhesive agent, screwing, etc., for example.
基板180のZ軸負方向側の面には、押圧センサ170が固定されている。基板180は、利用者がマウス装置100を物体1の表面1AにZ軸負方向に押圧することによってプレート120及び支持板160が物体1から受ける反力によって移動しないように、筐体110に固定されている。
A pressure sensor 170 is fixed to the surface of the substrate 180 on the negative side of the Z axis. The substrate 180 is fixed to the housing 110 so that the plate 120 and the support plate 160 do not move due to a reaction force received from the object 1 when the user presses the mouse device 100 against the surface 1A of the object 1 in the negative Z-axis direction. Has been.
基板180のZ軸正方向側の面には、制御装置200が実装される。基板180は、例えば、FR-4(Flame Retardant type 4)規格の配線基板である。
The control device 200 is mounted on the surface of the substrate 180 on the Z axis positive direction side. The substrate 180 is, for example, an FR-4 (Flame Retardant type 4) standard wiring substrate.
以上のような構成のマウス装置100は、ポインタがモニタに表示される所定の記号又は所定のGUI操作部等に触れると、制御装置200の駆動制御部が振動素子140を駆動し、プレート120を超音波帯の周波数で振動させる。この超音波帯の周波数は、プレート120と振動素子140とを含む共振系の共振周波数であり、プレート120に定在波を発生させる。
In the mouse device 100 configured as described above, when the pointer touches a predetermined symbol displayed on the monitor, a predetermined GUI operation unit, or the like, the drive control unit of the control device 200 drives the vibration element 140 to move the plate 120. Vibrate at ultrasonic frequency. The frequency of this ultrasonic band is a resonance frequency of a resonance system including the plate 120 and the vibration element 140 and causes the plate 120 to generate a standing wave.
マウス装置100は、超音波帯の定在波を発生させることにより、筐体110を通じて利用者に触感を提供する。
The mouse device 100 provides a tactile sensation to the user through the housing 110 by generating a standing wave in the ultrasonic band.
また、このように振動素子140が駆動されるときに、利用者がマウス装置100を物体1の表面1AにZ軸負方向に押圧する力を変化させると、マウス装置100は、利用者の手に提供される触感が一定になるように、振動素子140を駆動する駆動信号の振幅を変化させる。
In addition, when the vibration element 140 is driven in this way, if the user changes the force with which the mouse device 100 is pressed against the surface 1A of the object 1 in the negative direction of the Z-axis, the mouse device 100 is moved by the user's hand. The amplitude of the drive signal that drives the vibration element 140 is changed so that the tactile sensation provided to the sound is constant.
より具体的には、利用者がマウス装置100を物体1に押圧する力を増大させると、マウス装置100は、利用者の手に提供される触感が一定になるように、振動素子140を駆動する駆動信号の振幅を増大させる。また、利用者がマウス装置100を物体1に押圧する力を減少させると、マウス装置100は、利用者の手に提供される触感が一定になるように、振動素子140を駆動する駆動信号の振幅を減少させる。なお、このような押圧力に対する駆動信号の振幅の制御については、図22乃至図25を用いて後述する。
More specifically, when the user increases the force with which the mouse device 100 is pressed against the object 1, the mouse device 100 drives the vibration element 140 so that the tactile sensation provided to the user's hand is constant. The amplitude of the drive signal to be increased is increased. In addition, when the user presses the mouse device 100 against the object 1, the mouse device 100 generates a drive signal for driving the vibration element 140 so that the tactile sensation provided to the user's hand is constant. Decrease the amplitude. Note that the control of the amplitude of the drive signal with respect to such a pressing force will be described later with reference to FIGS.
また、ここでは、物体1からプレート120に掛かる押圧力を、支持板160と基板180を利用して押圧センサ170で検出する形態について説明するが、プレート120に掛かる押圧力を押圧センサ170で検出できるのであれば、プレート120と押圧センサ170を支える構成は、どのような構成であってもよい。
In addition, here, a description will be given of a mode in which the pressing force applied to the plate 120 from the object 1 is detected by the pressing sensor 170 using the support plate 160 and the substrate 180. However, the pressing force applied to the plate 120 is detected by the pressing sensor 170. As long as it can do, the structure which supports the plate 120 and the press sensor 170 may be what kind of structure.
次に、図4を用いて、プレート120に発生させる定在波について説明する。
Next, the standing wave generated in the plate 120 will be described with reference to FIG.
図4は、超音波帯の固有振動によってプレート120に生じる定在波のうち、プレート120の短辺に平行に形成される波頭を示す図であり、図4の(A)は側面図、(B)は斜視図である。図4の(A)、(B)では、図1及び図2と同様のXYZ座標を定義する。なお、図4の(A)、(B)では、理解しやすさのために、定在波の振幅を誇張して示す。また、図4の(A)、(B)では振動素子140を省略する。
FIG. 4 is a diagram showing a wave front formed in parallel to the short side of the plate 120 among standing waves generated in the plate 120 by the natural vibration of the ultrasonic band, and FIG. B) is a perspective view. 4A and 4B, XYZ coordinates similar to those in FIGS. 1 and 2 are defined. In FIGS. 4A and 4B, the amplitude of the standing wave is exaggerated for ease of understanding. In FIGS. 4A and 4B, the vibration element 140 is omitted.
プレート120のヤング率E、密度ρ、ポアソン比δ、長辺寸法l、厚さtと、長辺方向に存在する定在波の周期数kとを用いると、プレート120の固有振動数(共振周波数)fは次式(1)、(2)で表される。定在波は1/2周期単位で同じ波形を有するため、周期数kは、0.5刻みの値を取り、0.5、1、1.5、2・・・となる。
Using the Young's modulus E, density ρ, Poisson's ratio δ, long side dimension l, thickness t of the plate 120 and the standing wave period k existing in the long side direction, the natural frequency (resonance) of the plate 120 is obtained. The frequency f is expressed by the following equations (1) and (2). Since the standing wave has the same waveform in units of ½ period, the number of periods k takes values in increments of 0.5, which are 0.5, 1, 1.5, 2.

図4の(A)、(B)に示す定在波は、一例として、周期数kが5の場合の波形である。例えば、プレート120として、長辺の長さlが70mm、短辺の長さが40mm、厚さtが0.7mmのアルミニウム製の板状部材を用いる場合には、周期数kが5の場合に、固有振動数fは33.5[kHz]となる。この場合は、周波数が33.5[kHz]の駆動信号を用いればよい。
4A and 4B are waveforms when the number of periods k is 5, as an example. For example, in the case where an aluminum plate member having a long side length l of 70 mm, a short side length of 40 mm, and a thickness t of 0.7 mm is used as the plate 120, the cycle number k is 5. In addition, the natural frequency f is 33.5 [kHz]. In this case, a drive signal having a frequency of 33.5 [kHz] may be used.
プレート120は、平板状の部材であるが、振動素子140(図1及び図2参照)を駆動して超音波帯の固有振動を発生させると、図4の(A)、(B)に示すように撓むことにより、表面に定在波が生じる。
Although the plate 120 is a flat plate-like member, when the vibration element 140 (see FIGS. 1 and 2) is driven to generate the natural vibration of the ultrasonic band, the plate 120 is shown in FIGS. In this way, a standing wave is generated on the surface.
なお、ここでは、1つの振動素子140がプレート120のZ軸正方向側の面において、Y軸負方向側において、X軸方向に伸延する短辺に沿って接着される形態について説明するが、振動素子140を2つ用いてもよい。2つの振動素子140を用いる場合は、もう1つの振動素子140をプレート120のZ軸正方向側の面において、Y軸正方向側において、X軸方向に伸延する短辺に沿って接着すればよい。この場合に、2つの振動素子140は、プレート120の2つの短辺に平行な中心線を対称軸として、軸対称になるように配設すればよい。
Here, a description will be given of a form in which one vibration element 140 is bonded along the short side extending in the X-axis direction on the Y-axis negative direction side on the surface of the plate 120 on the Z-axis positive direction side. Two vibration elements 140 may be used. When two vibration elements 140 are used, another vibration element 140 is bonded to the surface on the Z-axis positive direction side of the plate 120 along the short side extending in the X-axis direction on the Y-axis positive direction side. Good. In this case, the two vibration elements 140 may be arranged so as to be axially symmetric with respect to a center line parallel to the two short sides of the plate 120.
また、2つの振動素子140を駆動する場合は、周期数kが整数の場合は同一位相で駆動すればよく、周期数kが小数(整数部と小数部とを含む数)の場合は逆位相で駆動すればよい。
In addition, when the two vibration elements 140 are driven, they may be driven with the same phase when the number of periods k is an integer, and with opposite phases when the number of periods k is a decimal (a number including an integer part and a decimal part). It can be driven by.
また、支持板160の突出部161のY軸方向における位置は、プレート120に図4に示すように生じる固有振動(定在波)の節の位置に一致させればよい。
Further, the position of the protrusion 161 of the support plate 160 in the Y-axis direction may be matched with the position of the natural vibration (standing wave) node generated on the plate 120 as shown in FIG.
図5は、実施の形態のマウス装置100を含むコンピュータシステムの斜視図である。図5に示すコンピュータシステム10は、本体部11、ディスプレイパネル12、キーボード13、マウス装置100、及びモデム15を含む。ここでは、本体部11、ディスプレイパネル12、及びキーボード13をPCとして取り扱う。
FIG. 5 is a perspective view of a computer system including the mouse device 100 of the embodiment. A computer system 10 shown in FIG. 5 includes a main body 11, a display panel 12, a keyboard 13, a mouse device 100, and a modem 15. Here, the main body 11, the display panel 12, and the keyboard 13 are handled as a PC.
本体部11は、CPU(Central Processing Unit:中央演算装置)、HDD(Hard Disk Drive:ハードディスクドライブ)、及びディスクドライブ等を内蔵する。ディスプレイパネル12は、本体部11からの指示により様々な画像等を表示する。ディスプレイパネル12は、例えば、液晶モニタであればよい。キーボード13は、コンピュータシステム10に種々の情報を入力するための入力部である。マウス装置100は、ディスプレイパネル12に表示されるポインタ等の任意の位置を指定する入力部である。モデム15は、外部のデータベース等にアクセスして他のコンピュータシステムに記憶されているプログラム等をダウンロードする。
The main unit 11 includes a CPU (Central Processing Unit), an HDD (Hard Disk Drive), a disk drive, and the like. The display panel 12 displays various images and the like according to instructions from the main body unit 11. The display panel 12 may be a liquid crystal monitor, for example. The keyboard 13 is an input unit for inputting various information to the computer system 10. The mouse device 100 is an input unit that designates an arbitrary position such as a pointer displayed on the display panel 12. The modem 15 accesses an external database or the like and downloads a program or the like stored in another computer system.
マウス装置100を利用するためのアプリケーションプログラムは、ディスク17等の可搬型記録媒体に格納されるか、モデム15等の通信装置を使って他のコンピュータシステムの記録媒体16からダウンロードされ、コンピュータシステム10に入力されてコンパイルされる。
An application program for using the mouse device 100 is stored in a portable recording medium such as the disk 17 or downloaded from the recording medium 16 of another computer system using a communication device such as the modem 15, and the computer system 10. To be compiled.
マウス装置100を利用するためのアプリケーションプログラムは、例えばディスク17等のコンピュータ読み取り可能な記録媒体に格納されていてもよい。コンピュータ読み取り可能な記録媒体は、ディスク17、ICカードメモリ、フロッピー(登録商標)ディスク等の磁気ディスク、光磁気ディスク、CD-ROM、USB(Universal Serial Bus)メモリ等の可搬型記録媒体に限定されるものではない。コンピュータ読み取り可能な記録媒体は、モデム15又はLAN等の通信装置を介して接続されるコンピュータシステムでアクセス可能な各種記録媒体を含む。
The application program for using the mouse device 100 may be stored in a computer-readable recording medium such as the disk 17. The computer-readable recording medium is limited to a portable recording medium such as a disk 17, an IC card memory, a magnetic disk such as a floppy (registered trademark) disk, a magneto-optical disk, a CD-ROM, or a USB (Universal Serial Bus) memory. It is not something. The computer-readable recording medium includes various recording media accessible by a computer system connected via a communication device such as a modem 15 or a LAN.
図6は、コンピュータシステム10の本体部11内の要部の構成を説明するブロック図である。本体部11は、バス20によって接続されたCPU21、RAM又はROM等を含むメモリ部22、ディスク17用のディスクドライブ23、及びハードディスクドライブ(HDD)24を含む。実施の形態では、ディスプレイパネル12、キーボード13、及びマウス装置100は、バス20を介してCPU21に接続されているが、これらはCPU21に直接的に接続されていてもよい。また、ディスプレイパネル12は、入出力画像データの処理を行う周知のグラフィックインタフェース(図示せず)を介してCPU21に接続されていてもよい。
FIG. 6 is a block diagram illustrating a configuration of a main part in the main body 11 of the computer system 10. The main body 11 includes a CPU 21 connected by a bus 20, a memory unit 22 including a RAM or a ROM, a disk drive 23 for the disk 17, and a hard disk drive (HDD) 24. In the embodiment, the display panel 12, the keyboard 13, and the mouse device 100 are connected to the CPU 21 via the bus 20, but these may be directly connected to the CPU 21. The display panel 12 may be connected to the CPU 21 via a known graphic interface (not shown) that processes input / output image data.
なお、コンピュータシステム10は、図5及び図6に示す構成のものに限定されず、各種周知の要素を付加してもよく、又は代替的に用いてもよい。
Note that the computer system 10 is not limited to the configuration shown in FIGS. 5 and 6, and various well-known elements may be added or alternatively used.
図7は、実施の形態のPCの本体部11の内部構成を示す図である。
FIG. 7 is a diagram illustrating an internal configuration of the main body 11 of the PC according to the embodiment.
本体部11は、制御部510、アプリケーションプロセッサ520、通信部530、振幅データ出力部540、及びメモリ550を含む。また、本体部11には、ディスプレイパネル12及びドライバIC12Bが接続されている。制御部510、アプリケーションプロセッサ520、及び振幅データ出力部540は、本体部11に含まれるCPU(Central Processing Unit)チップによって実現される機能ブロックを表したものである。
The main body unit 11 includes a control unit 510, an application processor 520, a communication unit 530, an amplitude data output unit 540, and a memory 550. Further, a display panel 12 and a driver IC 12B are connected to the main body 11. The control unit 510, the application processor 520, and the amplitude data output unit 540 represent functional blocks realized by a CPU (Central Processing Unit) chip included in the main body unit 11.
図7では、ディスプレイパネル12、マウス装置100、及びモデム15(図5参照)を省略する。また、ここでは、ドライバIC12B、制御部510、アプリケーションプロセッサ520、通信部530、振幅データ出力部540、及びメモリ550について説明する。
In FIG. 7, the display panel 12, the mouse device 100, and the modem 15 (see FIG. 5) are omitted. Here, the driver IC 12B, the control unit 510, the application processor 520, the communication unit 530, the amplitude data output unit 540, and the memory 550 will be described.
ドライバIC12Bは、ディスプレイパネル12に接続されており、アプリケーションプロセッサ520から出力される描画データをディスプレイパネル12に入力し、描画データに基づく画像をディスプレイパネル12に表示させる。これにより、ディスプレイパネル12には、描画データに基づくGUI操作部又は画像等が表示される。
The driver IC 12B is connected to the display panel 12, inputs the drawing data output from the application processor 520 to the display panel 12, and causes the display panel 12 to display an image based on the drawing data. As a result, a GUI operation unit or an image based on the drawing data is displayed on the display panel 12.
制御部510は、本体部11が実行するすべての処理を統括する制御部である。ここでは、特に、制御部510の機能のうち、ディスプレイパネル12に表示するポインタの位置の求め方について説明する。
The control unit 510 is a control unit that controls all processes executed by the main body unit 11. Here, in particular, a method of obtaining the position of the pointer displayed on the display panel 12 among the functions of the control unit 510 will be described.
制御部510は、通信部530を介してマウス装置100から入力されるマウス装置100の移動量と移動方向を表すデータに基づき、ディスプレイパネル12に表示されるポインタの位置を求める。制御部510は、ポインタ制御部の一例である。
The control unit 510 obtains the position of the pointer displayed on the display panel 12 based on the data representing the movement amount and movement direction of the mouse device 100 input from the mouse device 100 via the communication unit 530. Control unit 510 is an example of a pointer control unit.
ここで、ディスプレイパネル12に表示されるテキストの中の記号の位置は、例えば、PCにインストールされているOS(Operating System)によって特定される。ここで、記号とは、記号とは、文字、数字、絵文字、顔文字、その他の記号を含む総称である。また、文字は、平仮名、カタカナ、漢字、アルファベット、及びその他の言語の表記に用いる文字である。
Here, the position of the symbol in the text displayed on the display panel 12 is specified by, for example, an OS (Operating System) installed in the PC. Here, the symbol is a generic name including characters, numbers, pictograms, emoticons, and other symbols. The characters are characters used for writing hiragana, katakana, kanji, alphabets, and other languages.
また、ディスプレイパネル12に表示されるテキストの中の記号のうち、ハイパーリンクが設定されている記号の位置は、PCにインストールされているOSによって特定される。ハイパーリンクが設定されている記号は、所定の記号の一例である。
In addition, among the symbols in the text displayed on the display panel 12, the position of the symbol for which the hyperlink is set is specified by the OS installed in the PC. A symbol for which a hyperlink is set is an example of a predetermined symbol.
また、OSは、ポインタが、ハイパーリンクが設定されている記号に触れているかどうかを判定する。OSは、ポインタが、ハイパーリンクが設定されている記号に触れている場合には、触れていることを表す信号を出力する。
Also, the OS determines whether the pointer is touching a symbol for which a hyperlink is set. When the pointer touches a symbol for which a hyperlink is set, the OS outputs a signal indicating that the pointer is touched.
このようなOSは、本体部11にインストールされており、制御部510が実行するものとする。
It is assumed that such an OS is installed in the main body unit 11 and executed by the control unit 510.
アプリケーションプロセッサ520は、本体部11の種々のアプリケーションを実行する処理を行う。
Application processor 520 performs processing for executing various applications of main unit 11.
通信部530は、本体部11とマウス装置100とがケーブル114で接続される場合には、ケーブル114に接続されるインターフェイスである。また、本体部11とマウス装置100とが無線通信によって接続される場合には、通信部530は、例えば、Bluetooth(登録商標)等の近距離通信用の通信部である。
The communication unit 530 is an interface connected to the cable 114 when the main body unit 11 and the mouse device 100 are connected by the cable 114. When the main body unit 11 and the mouse device 100 are connected by wireless communication, the communication unit 530 is a communication unit for near field communication such as Bluetooth (registered trademark), for example.
振幅データ出力部540は、振動素子140の駆動に用いる駆動信号の振幅値を表す振幅データを生成する。振幅値は、マウス装置100によって操作されるポインタの位置の時間的変化度合に応じて設定される。振幅データ出力部540が出力する振幅データは、マウス装置100の振動素子140を駆動する駆動信号になるデータである。振幅データ出力部540は、駆動信号出力部の一例である。
The amplitude data output unit 540 generates amplitude data representing the amplitude value of the drive signal used for driving the vibration element 140. The amplitude value is set according to the degree of temporal change in the position of the pointer operated by the mouse device 100. The amplitude data output from the amplitude data output unit 540 is data that becomes a drive signal for driving the vibration element 140 of the mouse device 100. The amplitude data output unit 540 is an example of a drive signal output unit.
また、実施の形態の駆動制御装置300は、マウス装置100が物体1の表面1Aに沿って移動したときに、プレート120に掛かる動摩擦力を変化させるためにプレート120を振動させる。動摩擦力は、プレート120が移動しているときに発生するため、振幅データ出力部540は、マウス装置100の移動速度が所定の閾値速度以上になったときに、振動素子140を振動させるための振幅データを出力する。
Further, the drive control device 300 according to the embodiment vibrates the plate 120 in order to change the dynamic friction force applied to the plate 120 when the mouse device 100 moves along the surface 1A of the object 1. Since the dynamic friction force is generated when the plate 120 is moving, the amplitude data output unit 540 is used to vibrate the vibration element 140 when the moving speed of the mouse device 100 exceeds a predetermined threshold speed. Outputs amplitude data.
従って、振幅データ出力部540が出力する振幅データが表す振幅値は、移動速度が所定の閾値速度未満のときはゼロであり、移動速度が所定の閾値速度以上になると、移動速度に応じて所定の振幅値に設定される。
Therefore, the amplitude value represented by the amplitude data output from the amplitude data output unit 540 is zero when the moving speed is less than the predetermined threshold speed, and is predetermined according to the moving speed when the moving speed is equal to or higher than the predetermined threshold speed. Is set to the amplitude value.
また、振幅データ出力部540は、制御部510によって、ポインタが、振動を発生させるべき所定の記号に触れたとき、又は、所定の領域内にあるときに、振幅データを出力する。
Also, the amplitude data output unit 540 outputs amplitude data when the control unit 510 touches a predetermined symbol that should generate vibration or is within a predetermined area.
振幅データ出力部540は、制御部510からハイパーリンクが設定されている記号にポインタが触れていることを表す信号が出力されると、ハイパーリンクに対して割り当てられている振動パターンの振幅データを出力する。
When the control unit 510 outputs a signal indicating that the pointer is touching the symbol for which the hyperlink is set, the amplitude data output unit 540 outputs the amplitude data of the vibration pattern assigned to the hyperlink. Output.
また、振幅データ出力部540は、ポインタがGUI操作部等の表示領域の内部にあるときには、GUI操作部等に対して割り当てられている振動パターンの振幅データを出力する。
Also, the amplitude data output unit 540 outputs amplitude data of the vibration pattern assigned to the GUI operation unit or the like when the pointer is inside the display area such as the GUI operation unit or the like.
ここで、ディスプレイパネル12に表示するGUI操作部及びその他の画像を表示する領域等のディスプレイパネル12上における位置は、当該領域を表す領域データによって特定される。領域データは、すべてのアプリケーションにおいて、ディスプレイパネル12に表示されるすべてのGUI操作部等を表す領域について存在する。
Here, the position on the display panel 12 such as a GUI operation unit to be displayed on the display panel 12 and an area for displaying other images is specified by area data representing the area. The area data exists for areas representing all GUI operation units and the like displayed on the display panel 12 in all applications.
振幅データ出力部540は、領域データを用いて、制御部510から入力されるポインタの位置が、振動を発生させるべき所定の領域の内部にあるか否かを判定する。
The amplitude data output unit 540 determines whether or not the position of the pointer input from the control unit 510 is within a predetermined region where vibration is to be generated, using the region data.
アプリケーションの種類を表すデータと、操作入力が行われるGUI操作部等を表す領域データと、振動パターンを表すパターンデータとを関連付けたデータは、メモリ550に格納されている。
Data that associates data representing the type of application, area data representing a GUI operation unit or the like on which an operation input is performed, and pattern data representing a vibration pattern is stored in the memory 550.
振幅データ出力部540は、上述のようにして生成する振幅データを通信部530を介して、マウス装置100に出力する。この結果、マウス装置100では、振幅データに基づく駆動信号によって振動素子140が駆動される。
The amplitude data output unit 540 outputs the amplitude data generated as described above to the mouse device 100 via the communication unit 530. As a result, in the mouse device 100, the vibration element 140 is driven by a drive signal based on the amplitude data.
また、メモリ550は、アプリケーションプロセッサ520がアプリケーションの実行に必要とするデータ及びプログラム、及び、通信部530が通信処理に必要とするデータ及びプログラム等を格納する。
Further, the memory 550 stores data and programs necessary for the application processor 520 to execute the application, data and programs necessary for the communication processing by the communication unit 530, and the like.
図8は、実施の形態のマウス装置100の構成を示す図である。
FIG. 8 is a diagram illustrating a configuration of the mouse device 100 according to the embodiment.
マウス装置100は、振動素子140、アンプ141、接触センサ150、押圧センサ170、及び制御装置200を含む。制御装置200は、主制御部210、移動検出部220、通信部230、駆動制御部240、メモリ250、スイッチ260、正弦波発生器310、及び振幅変調器320を有する。図8では、これら以外のマウス装置100の構成要素については省略する。
The mouse device 100 includes a vibration element 140, an amplifier 141, a contact sensor 150, a press sensor 170, and a control device 200. The control device 200 includes a main control unit 210, a movement detection unit 220, a communication unit 230, a drive control unit 240, a memory 250, a switch 260, a sine wave generator 310, and an amplitude modulator 320. In FIG. 8, the other components of the mouse device 100 are omitted.
主制御部210、移動検出部220、駆動制御部240は、例えば、ICチップで実現される。なお、主制御部210、移動検出部220、駆動制御部240は、1つのICチップで構築されていてもよいし、それぞれが別のICチップで構築されていてもよい。なお、主制御部210と駆動制御部240は、制御装置200の制御部の一例である。
The main control unit 210, the movement detection unit 220, and the drive control unit 240 are realized by, for example, an IC chip. The main control unit 210, the movement detection unit 220, and the drive control unit 240 may be configured with one IC chip, or may be configured with different IC chips. The main control unit 210 and the drive control unit 240 are examples of the control unit of the control device 200.
アンプ141は、振幅変調器320と振動素子140との間に配設されており、振幅変調器320から出力される駆動信号を増幅して振動素子140を駆動する。
The amplifier 141 is disposed between the amplitude modulator 320 and the vibration element 140 and drives the vibration element 140 by amplifying the drive signal output from the amplitude modulator 320.
主制御部210は、移動検出部220によって検出されるマウス装置100の移動方向及び移動量を表すデータを通信部230を介して本体部11に伝送する。また、主制御部210は、ホイール111の操作量を表すデータを通信部230を介して本体部11に伝送する。
The main control unit 210 transmits data representing the movement direction and movement amount of the mouse device 100 detected by the movement detection unit 220 to the main body unit 11 via the communication unit 230. Further, the main control unit 210 transmits data representing the operation amount of the wheel 111 to the main body unit 11 via the communication unit 230.
また、主制御部210は、接触判定部211と演算部212を有する。接触判定部211は、接触センサ150が出力する電圧値に基づいて、利用者がマウス装置100に触れたかどうかを判定する。
The main control unit 210 includes a contact determination unit 211 and a calculation unit 212. The contact determination unit 211 determines whether the user has touched the mouse device 100 based on the voltage value output from the contact sensor 150.
演算部212は、押圧センサ170が出力する押圧力を表す信号に基づいて押圧力を求め、駆動信号の振幅値を増幅する増幅率を決定する。演算部212は、コンピュータシステム10から伝送される振幅データを増幅率で増幅し、増幅した振幅データを駆動制御部240に出力する。演算部212は、増幅部の一例である。
The calculation unit 212 obtains a pressing force based on a signal representing the pressing force output from the pressing sensor 170, and determines an amplification factor for amplifying the amplitude value of the drive signal. The calculation unit 212 amplifies the amplitude data transmitted from the computer system 10 with the amplification factor, and outputs the amplified amplitude data to the drive control unit 240. The calculation unit 212 is an example of an amplification unit.
また、主制御部210は、LED115の点灯を制御する。また、主制御部210は、スイッチ260に入力されるマウス装置100のオン/オフを切り替える操作に応じて、電源のオン/オフを切り替える。
The main control unit 210 controls the lighting of the LED 115. In addition, the main control unit 210 switches on / off the power source in response to an operation for switching on / off of the mouse device 100 input to the switch 260.
移動検出部220は、センサ116から入力されるデータに基づき、マウス装置100の移動方向及び移動量を検出する。センサ116としてイメージセンサを用いる場合には、移動検出部220は、センサ116から入力される画像を解析し、マウス装置100の移動方向及び移動量を検出する
通信部230は、本体部11とマウス装置100とがケーブル114で接続される場合には、ケーブル114に接続されるインターフェイスである。また、本体部11とマウス装置100とが無線通信によって接続される場合には、通信部230は、例えば、Bluetooth等の近距離通信用の通信部である。 Themovement detection unit 220 detects the movement direction and movement amount of the mouse device 100 based on the data input from the sensor 116. When an image sensor is used as the sensor 116, the movement detection unit 220 analyzes the image input from the sensor 116 and detects the movement direction and movement amount of the mouse device 100. The communication unit 230 includes the main body unit 11 and the mouse. When the apparatus 100 is connected with the cable 114, the interface is connected to the cable 114. Further, when the main body unit 11 and the mouse device 100 are connected by wireless communication, the communication unit 230 is a communication unit for short-range communication such as Bluetooth, for example.
通信部230は、本体部11とマウス装置100とがケーブル114で接続される場合には、ケーブル114に接続されるインターフェイスである。また、本体部11とマウス装置100とが無線通信によって接続される場合には、通信部230は、例えば、Bluetooth等の近距離通信用の通信部である。 The
通信部230は、主制御部210が出力するホイール111の操作量を表すデータを本体部11に伝送する。通信部230は、移動検出部220によって検出される移動方向及び移動量を表すデータを本体部11に伝送する。また、通信部230は、本体部11から伝送される駆動信号を駆動制御部240に伝送する。
The communication unit 230 transmits data representing the operation amount of the wheel 111 output from the main control unit 210 to the main body unit 11. The communication unit 230 transmits data representing the movement direction and the movement amount detected by the movement detection unit 220 to the main body unit 11. The communication unit 230 transmits the drive signal transmitted from the main body unit 11 to the drive control unit 240.
駆動制御部240は、本体部11から伝送される駆動信号を用いて振動素子140を駆動する。駆動信号は、正弦波発生器310から入力される超音波帯の正弦波信号の振幅を変調する振幅データが時系列的に並べられたデータである。振幅データは、変調後の駆動信号の振幅を表すデータを時系列的に並べたデータである。
The drive control unit 240 drives the vibration element 140 using the drive signal transmitted from the main body unit 11. The drive signal is data in which amplitude data for modulating the amplitude of the sine wave signal of the ultrasonic band input from the sine wave generator 310 is arranged in time series. The amplitude data is data in which data representing the amplitude of the modulated drive signal is arranged in time series.
メモリ250は、駆動信号の振幅値を増幅する際に用いる増幅率を表す増幅率データを格納する。増幅率データは、主制御部210が増幅率を決定する際にメモリ250から読み出される。主制御部210は、押圧センサ170の出力信号に基づいて押圧力を判定し、押圧力に応じて増幅率を決定する。
The memory 250 stores amplification factor data representing the amplification factor used when amplifying the amplitude value of the drive signal. The amplification factor data is read from the memory 250 when the main control unit 210 determines the amplification factor. The main control unit 210 determines the pressing force based on the output signal of the pressing sensor 170, and determines the amplification factor according to the pressing force.
スイッチ260は、マウス装置100のオン/オフを切り替える操作を行うスイッチである。スイッチ260が操作されると、主制御部210は、スイッチ260に入力されるマウス装置100のオン/オフを切り替える操作に応じて、電源のオン/オフを切り替える。
The switch 260 is a switch for performing an operation of switching the mouse device 100 on / off. When the switch 260 is operated, the main control unit 210 switches the power on / off in accordance with an operation for switching on / off of the mouse device 100 input to the switch 260.
正弦波発生器310は、プレート120を固有振動数で振動させるための駆動信号を生成するのに必要な正弦波を発生させる。例えば、プレート120を33.5[kHz]の固有振動数fで振動させる場合は、正弦波の周波数は、33.5[kHz]となる。正弦波発生器310は、超音波帯の正弦波信号を振幅変調器320に入力する。
The sine wave generator 310 generates a sine wave necessary for generating a drive signal for vibrating the plate 120 at the natural frequency. For example, when the plate 120 is vibrated at a natural frequency f of 33.5 [kHz], the frequency of the sine wave is 33.5 [kHz]. The sine wave generator 310 inputs an ultrasonic band sine wave signal to the amplitude modulator 320.
振幅変調器320は、駆動制御部240から入力される振幅データを用いて、正弦波発生器310から入力される正弦波信号の振幅を変調して駆動信号を生成する。振幅変調器320は、正弦波発生器310から入力される超音波帯の正弦波信号の振幅のみを変調し、周波数及び位相は変調せずに、駆動信号を生成する。
The amplitude modulator 320 modulates the amplitude of the sine wave signal input from the sine wave generator 310 using the amplitude data input from the drive control unit 240 to generate a drive signal. The amplitude modulator 320 modulates only the amplitude of the sine wave signal in the ultrasonic band input from the sine wave generator 310, and generates the drive signal without modulating the frequency and phase.
このため、振幅変調器320が出力する駆動信号は、正弦波発生器310から入力される超音波帯の正弦波信号の振幅のみを変調した超音波帯の正弦波信号である。なお、振幅データがゼロの場合は、駆動信号の振幅はゼロになる。これは、振幅変調器320が駆動信号を出力しないことと等しい。
Therefore, the drive signal output by the amplitude modulator 320 is an ultrasonic band sine wave signal obtained by modulating only the amplitude of the ultrasonic band sine wave signal input from the sine wave generator 310. Note that when the amplitude data is zero, the amplitude of the drive signal is zero. This is equivalent to the amplitude modulator 320 not outputting a drive signal.
プレート120は、駆動信号の周波数を固定した単一の固有振動モードで、駆動信号の振幅を変更することによって振動素子140を駆動する。すなわち、マウス装置100では、プレート120は、固有振動モードを変えることなく、単一の固有振動モードで、駆動信号の振幅を変更することによって振動素子140を駆動する。
The plate 120 drives the vibration element 140 by changing the amplitude of the drive signal in a single natural vibration mode in which the frequency of the drive signal is fixed. That is, in the mouse device 100, the plate 120 drives the vibration element 140 by changing the amplitude of the drive signal in a single natural vibration mode without changing the natural vibration mode.
次に、図9乃至図21を用いて、ディスプレイパネル12(図5及び図7参照)に表示されるポインタがマウス装置100によって操作される際に、ポインタの位置及び位置の時間的変化度合に応じて、本体部11(図5参照)から出力される振幅データに応じて振動素子140が駆動される動作例について説明する。
Next, referring to FIGS. 9 to 21, when the pointer displayed on the display panel 12 (see FIGS. 5 and 7) is operated by the mouse device 100, the position of the pointer and the degree of temporal change of the position are determined. Accordingly, an operation example in which the vibration element 140 is driven in accordance with the amplitude data output from the main body 11 (see FIG. 5) will be described.
なお、ここでは、利用者がマウス装置100を押圧する力は一定であり、押圧センサ170の出力に応じて駆動信号の増幅は行われないこととする。
Here, it is assumed that the force with which the user presses the mouse device 100 is constant, and the drive signal is not amplified according to the output of the press sensor 170.
図9は、実施の形態のマウス装置100の第1の動作例を説明する図である。図10は、図9に示す第1の動作例に対応する振動素子140の振動パターンを示す。
FIG. 9 is a diagram illustrating a first operation example of the mouse device 100 according to the embodiment. FIG. 10 shows a vibration pattern of the vibration element 140 corresponding to the first operation example shown in FIG.
図9には、ディスプレイパネル12に表示されるテキストを示す。テキストの一部には、ハイパーリンクが設定されている。なお、図9に示すテキストは、英語版ウィキペディアからの引用である(Olympic Games (May 26, 2015, 2:10 UTC) Wikipedia: The Free Encyclopedia. Retrieved from http://en.wikipedia.org/wiki/Olympic_Games)。
FIG. 9 shows text displayed on the display panel 12. A hyperlink is set in a part of the text. The text shown in FIG. 9 is quoted from the English version of Wikipedia (Olympic Games (May 26, 2015, 2:10 UTC) Wikipedia: The Free Encyclopedia. Retrieved from http://en.wikipedia.org/wiki / Olympic_Games).
図9では、ハイパーリンクが設定されていない単語を黒で示し、ハイパーリンクが設定されている単語をグレーで示す。ポインタ12Aは、利用者がマウス装置100を物体1の表面1A(図1及び図2参照)で移動させることにより、ディスプレイパネル12に表示される画像の中で移動する。
In FIG. 9, a word for which no hyperlink is set is shown in black, and a word for which a hyperlink is set is shown in gray. The pointer 12A moves in the image displayed on the display panel 12 when the user moves the mouse device 100 on the surface 1A of the object 1 (see FIGS. 1 and 2).
例えば、ハイパーリンクが設定されている単語"Ancient Olympic Games"の"Ancient"にポインタ12Aが触れたとする。より具体的には、上向きの矢印で示すように、時刻t11でポインタ12Aが"Ancient"の下側から接近して触れ始める。
For example, assume that the pointer 12A touches “Ancient” of the word “Ancient Olympic Games” for which a hyperlink is set. More specifically, as indicated by an upward arrow, the pointer 12A approaches from the lower side of “Ancient” and starts to touch at time t11.
このようにポインタ12Aが操作された場合には、振動素子140を駆動する駆動信号の振動パターンは、図10に示すように、時刻t11で振幅がゼロからA1になり、ごく短い時間が経過した時刻t12で振幅がゼロになる振動パターンである。
When the pointer 12A is operated in this way, the vibration pattern of the drive signal for driving the vibration element 140 changes from zero to A1 at time t11 as shown in FIG. 10, and a very short time has elapsed. This is a vibration pattern in which the amplitude becomes zero at time t12.
なお、図10に示す振動パターンは、例えば、振幅を表すデータを時系列的に並べたデータによって表される。すなわち、図10に示す振動パターンは、時系列的に配列される振幅を表す複数の振幅データの包絡線によって与えられる。
Note that the vibration pattern shown in FIG. 10 is represented by, for example, data in which data representing amplitudes are arranged in time series. That is, the vibration pattern shown in FIG. 10 is given by an envelope of a plurality of amplitude data representing amplitudes arranged in time series.
図10に示すような振動パターンで振動素子140が駆動されると、プレート120には、時刻t11で超音波帯の固有振動が発生し、時刻t12で超音波帯の固有振動が発生しなくなる。
When the vibration element 140 is driven with the vibration pattern as shown in FIG. 10, the natural vibration of the ultrasonic band is generated on the plate 120 at the time t11, and the natural vibration of the ultrasonic band is not generated at the time t12.
プレート120に超音波帯の固有振動が発生すると、スクイーズ効果によってプレート120と物体1の表面1A(図1及び図2参照)との間に空気層が介在し、表面1Aに対するプレート120の動摩擦係数が低下する。
When natural vibration of the ultrasonic band is generated in the plate 120, an air layer is interposed between the plate 120 and the surface 1A of the object 1 (see FIGS. 1 and 2) due to the squeeze effect, and the dynamic friction coefficient of the plate 120 with respect to the surface 1A. Decreases.
また、プレート120に超音波帯の固有振動が発生している状態から、超音波帯の固有振動が発生しない状態に切り替わると、空気層がなくなるため、表面1Aに対するプレート120の動摩擦係数が増大する。
Further, when switching from the state in which the natural vibration of the ultrasonic band is generated in the plate 120 to the state in which the natural vibration of the ultrasonic band is not generated, the air layer disappears, and thus the dynamic friction coefficient of the plate 120 with respect to the surface 1A increases. .
従って、マウス装置100を操作する利用者は、時刻t11では動摩擦力の低下によってマウス装置100が表面1Aに対して滑りやすくなる感触を得て、時刻t12では動摩擦力の増大によってマウス装置100が表面1Aに対して滑りにくくなる感触を得る。
Accordingly, the user who operates the mouse device 100 has a feeling that the mouse device 100 becomes slippery with respect to the surface 1A due to the decrease in the dynamic friction force at time t11, and the mouse device 100 is moved to the surface at time t12 due to the increase in the dynamic friction force. Get a feel that is less slippery than 1A.
このため、時刻t11において、ハイパーリンクが設定されている単語にポインタ12Aが接触するときに、マウス装置100が表面1Aに対して滑りやすくなり、時刻t11の直後の時刻t12で振動が発生しなくなると、動摩擦力の増大により、マウス装置100が表面1Aに対して滑りにくくなる。
For this reason, when the pointer 12A comes into contact with a word for which a hyperlink is set at time t11, the mouse device 100 becomes slippery with respect to the surface 1A, and vibration does not occur at time t12 immediately after time t11. Then, the increase in the dynamic friction force makes it difficult for the mouse device 100 to slide with respect to the surface 1A.
従って、ハイパーリンクが設定されている単語にポインタ12Aが接触するときは、マウス装置100が表面1Aに対して一瞬滑りやすくなり、その直後(時刻t12)にマウス装置100が表面1Aに対して滑りにくくなることによって、利用者の手には、マウス装置100が突起物に当たったような触感が提供される。これにより、利用者はポインタ12Aがハイパーリンクが設定されている単語に到達したことを触感で知覚できる。
Therefore, when the pointer 12A comes into contact with a word for which a hyperlink is set, the mouse device 100 easily slides on the surface 1A for a moment, and immediately thereafter (time t12), the mouse device 100 slips on the surface 1A. By becoming difficult, the user's hand is provided with a tactile sensation as if the mouse device 100 hit the projection. Thereby, the user can perceive with tactile sensation that the pointer 12A has reached the word for which the hyperlink is set.
以上のような振動素子140の駆動制御は、コンピュータシステム10の本体部11(図5参照)の振幅データ出力部540がメモリ550に格納される振幅データをマウス装置100に伝送する。そして、マウス装置100の駆動制御部240が振幅データを振幅変調器320に出力し、正弦波発生器310から出力される超音波帯の正弦波信号を振幅変調器320が振幅データで振幅変調することによって駆動信号を生成し、駆動信号によって振動素子140が駆動される。
In the drive control of the vibration element 140 as described above, the amplitude data output unit 540 of the main body 11 (see FIG. 5) of the computer system 10 transmits the amplitude data stored in the memory 550 to the mouse device 100. Then, the drive control unit 240 of the mouse device 100 outputs the amplitude data to the amplitude modulator 320, and the amplitude modulator 320 amplitude-modulates the ultrasonic band sine wave signal output from the sine wave generator 310 with the amplitude data. Thus, a drive signal is generated, and the vibration element 140 is driven by the drive signal.
なお、時刻t12は、時刻t11で振動素子140を駆動した後に、振動素子140の駆動をオフにするタイミングを表す。すなわち、振動素子140は、時刻t11から時刻t12の期間の間にわたってオンにされる。このように振動素子140をオンにする期間は、用途等に応じて適宜設定すればよい。このため、時刻t11に対する時刻t12のタイミングは、振動素子140をオンにする期間によって決定される。
Note that time t12 represents the timing at which the driving of the vibrating element 140 is turned off after the vibrating element 140 is driven at time t11. That is, the vibration element 140 is turned on during a period from time t11 to time t12. Thus, the period during which the vibration element 140 is turned on may be set as appropriate according to the application. For this reason, the timing of the time t12 with respect to the time t11 is determined by the period during which the vibration element 140 is turned on.
次に、図11及び図12を用いて、振幅データと振幅データ出力部540の制御処理について説明する。
Next, the control process of the amplitude data and the amplitude data output unit 540 will be described with reference to FIGS.
図11は、メモリ550に格納されるデータを示す図である。
FIG. 11 is a diagram showing data stored in the memory 550.
メモリ550に格納されるデータは、アプリケーションの種類を表すデータと、振動パターンを表すパターンデータとを関連付けたデータである。
The data stored in the memory 550 is data in which data representing the type of application is associated with pattern data representing a vibration pattern.
アプリケーションの種類を表すデータとして、アプリケーションID(Identification)を示す。また、振動パターンを表すパターンデータとして、P1~P5を示す。振動パターンを表すパターンデータは、振幅を表すデータを含んでおり、例えば、図10に示す振動パターンを表す。
· Shows application ID (Identification) as data indicating the type of application. P1 to P5 are shown as pattern data representing the vibration pattern. The pattern data representing the vibration pattern includes data representing the amplitude, and represents, for example, the vibration pattern shown in FIG.
なお、アプリケーションIDで表されるアプリケーションは、スマートフォン端末機、又は、タブレット型コンピュータで利用可能なあらゆるアプリケーションを含む。
Note that the application represented by the application ID includes any application that can be used on a smartphone terminal or a tablet computer.
図12は、振幅データ出力部540が実行する処理を示すフローチャートである。図12に示す処理は、コンピュータシステム10本体部11(図7参照)に、マウス装置100を利用するためのアプリケーションプログラムをインストールすることによって実行可能になる。
FIG. 12 is a flowchart showing processing executed by the amplitude data output unit 540. The process shown in FIG. 12 can be executed by installing an application program for using the mouse device 100 in the computer system 10 main body 11 (see FIG. 7).
本体部11のOS(Operating System)は、所定の制御周期毎に本体部11を駆動するための制御を実行する。このため、振幅データ出力部540は、所定の制御周期毎に演算を行う。
The OS (Operating System) of the main body 11 executes control for driving the main body 11 at every predetermined control cycle. For this reason, the amplitude data output unit 540 performs calculation every predetermined control period.
また、本体部11のOSは、ポインタ12Aが、ハイパーリンクが設定されている単語に触れているかどうかを判定する。OSは、ポインタ12Aが、ハイパーリンクが設定されている単語に触れている場合には、触れていることを表す信号(ハイパーリンク接触信号)を出力する。このような処理は、本体部11の制御部510が実行する。制御部510は、ハイパーリンク接触信号を振幅データ出力部540に入力する。
Also, the OS of the main body 11 determines whether or not the pointer 12A touches a word for which a hyperlink is set. When the pointer 12A touches a word for which a hyperlink is set, the OS outputs a signal (hyperlink contact signal) indicating that the pointer is touched. Such processing is executed by the control unit 510 of the main body unit 11. Control unit 510 inputs a hyperlink contact signal to amplitude data output unit 540.
振幅データ出力部540は、本体部11の電源がオンにされることにより、処理をスタートさせる。
The amplitude data output unit 540 starts the process when the main unit 11 is turned on.
振幅データ出力部540は、ハイパーリンク接触信号が入力されているかどうかを判定する(ステップS1)。
The amplitude data output unit 540 determines whether a hyperlink contact signal is input (step S1).
振幅データ出力部540は、ステップS1でハイパーリンク接触信号が入力されている(S1:YES)と判定した場合は、メモリ550から振幅データを読み出して、振幅値を設定する(ステップS2A)。
When the amplitude data output unit 540 determines that the hyperlink contact signal is input in step S1 (S1: YES), the amplitude data output unit 540 reads the amplitude data from the memory 550 and sets the amplitude value (step S2A).
振幅データ出力部540は、ステップS2Aで振幅値を設定した振幅データを出力する(ステップS3)。これにより、振幅データ出力部540からマウス装置100に振幅データが伝送され、振幅変調器320は、正弦波発生器310から出力される正弦波の振幅を変調して駆動信号を生成し、振動素子140を駆動する。
The amplitude data output unit 540 outputs the amplitude data in which the amplitude value is set in step S2A (step S3). As a result, amplitude data is transmitted from the amplitude data output unit 540 to the mouse device 100, and the amplitude modulator 320 modulates the amplitude of the sine wave output from the sine wave generator 310 to generate a drive signal, and the vibration element 140 is driven.
一方、ステップS1でハイパーリンク接触信号が入力されていない(S1:NO)ないと判定した場合は、振幅データ出力部540は、振幅値をゼロに設定する(ステップS2B)。
On the other hand, if it is determined in step S1 that no hyperlink contact signal is input (S1: NO), the amplitude data output unit 540 sets the amplitude value to zero (step S2B).
この結果、振幅データ出力部540は、振幅値がゼロの振幅データを出力し、振幅変調器320は、正弦波発生器310から出力される正弦波の振幅をゼロに変調した駆動信号を生成する。このため、この場合は、振動素子140は駆動されない。
As a result, the amplitude data output unit 540 outputs amplitude data having an amplitude value of zero, and the amplitude modulator 320 generates a drive signal in which the amplitude of the sine wave output from the sine wave generator 310 is modulated to zero. . For this reason, in this case, the vibration element 140 is not driven.
以上より、ハイパーリンクが設定されている単語にポインタ12Aが接触すると、利用者の手には、マウス装置100が突起物に当たったような触感が提供される。これにより、利用者はポインタ12Aがハイパーリンクが設定されている単語に到達したことを触感で知覚できる。
From the above, when the pointer 12A touches a word for which a hyperlink is set, the user's hand is provided with a tactile sensation as if the mouse device 100 hit the projection. Thereby, the user can perceive with tactile sensation that the pointer 12A has reached the word for which the hyperlink is set.
なお、ここでは、ポインタ12Aがハイパーリンクが設定されている単語に到達したときに振動素子140を駆動する動作例について説明したが、ハイパーリンクが設定されている単語以外の任意の単語にポインタ12Aが到達したときに振動素子140を駆動するようにしてもよい。
Here, an example of the operation of driving the vibration element 140 when the pointer 12A reaches the word for which the hyperlink is set has been described. However, the pointer 12A can be set to any word other than the word for which the hyperlink is set. The vibration element 140 may be driven when the angle reaches.
図13は、実施の形態のマウス装置100の第2の動作例を説明する図である。図14は、図13に示す第2の動作例に対応する振動素子140の振動パターンを示す。
FIG. 13 is a diagram illustrating a second operation example of the mouse device 100 according to the embodiment. FIG. 14 shows a vibration pattern of the vibration element 140 corresponding to the second operation example shown in FIG.
図13には、ディスプレイパネル12に表示されるアイコンを示す。
FIG. 13 shows icons displayed on the display panel 12.
例えば、アイコン12Cをポインタ12Aが通過する場合について説明する。より具体的には、右向きの矢印で示すように、時刻t21でポインタ12Aがアイコン12Cの左側から接近して触れ始め、時刻t22でアイコン12Cを触れ終わったとする。
For example, the case where the pointer 12A passes through the icon 12C will be described. More specifically, as indicated by a right-pointing arrow, it is assumed that the pointer 12A starts approaching and touching from the left side of the icon 12C at time t21 and finishes touching the icon 12C at time t22.
このようにポインタ12Aが操作された場合には、振動素子140を駆動する駆動信号の振動パターンは、図14に示すように、時刻t21で振幅がゼロからB1になり、時刻t22で振幅がゼロになる振動パターンになる。
When the pointer 12A is thus operated, the vibration pattern of the drive signal for driving the vibration element 140 changes from zero to B1 at time t21 and zero at time t22, as shown in FIG. The vibration pattern becomes
このように振動素子140が駆動されると、プレート120には、時刻t21で超音波帯の固有振動が発生し、時刻t22で超音波帯の固有振動が発生しなくなる。
When the vibration element 140 is driven in this way, the natural vibration of the ultrasonic band is generated on the plate 120 at the time t21, and the natural vibration of the ultrasonic band is not generated at the time t22.
プレート120に超音波帯の固有振動が発生すると、スクイーズ効果によってプレート120と物体1の表面1A(図1及び図2参照)との間に空気層が介在し、表面1Aに対するプレート120の動摩擦係数が低下する。
When natural vibration of the ultrasonic band is generated in the plate 120, an air layer is interposed between the plate 120 and the surface 1A of the object 1 (see FIGS. 1 and 2) due to the squeeze effect, and the dynamic friction coefficient of the plate 120 with respect to the surface 1A. Decreases.
また、プレート120に超音波帯の固有振動が発生している状態から、超音波帯の固有振動が発生しない状態に切り替わると、空気層がなくなるため、表面1Aに対するプレート120の動摩擦係数が増大する。
Further, when switching from the state in which the natural vibration of the ultrasonic band is generated in the plate 120 to the state in which the natural vibration of the ultrasonic band is not generated, the air layer disappears, and thus the dynamic friction coefficient of the plate 120 with respect to the surface 1A increases. .
このため、時刻t21において、ポインタ12Aがアイコン12Cの表示領域に入るときに、マウス装置100が表面1Aに対して滑りやすくなり、時刻t22において、ポインタ12Aがアイコン12Cの表示領域から外に出ると、動摩擦力の増大により、マウス装置100が表面1Aに対して滑りにくくなる。
For this reason, when the pointer 12A enters the display area of the icon 12C at time t21, the mouse device 100 becomes slippery with respect to the surface 1A, and when the pointer 12A goes out of the display area of the icon 12C at time t22. As the dynamic friction force increases, the mouse device 100 is less likely to slip with respect to the surface 1A.
従って、ポインタ12Aがアイコン12Cの表示領域内に入るときは、マウス装置100が表面1Aに対して滑りやすくなり、利用者の手には、マウス装置100が滑りやすくなるような触感が提供される。これにより、利用者はポインタ12Aがアイコン12Cの表示領域に入ったことを触感で知覚できる。
Therefore, when the pointer 12A enters the display area of the icon 12C, the mouse device 100 becomes slippery with respect to the surface 1A, and a tactile sensation that makes the mouse device 100 slippery is provided to the user's hand. . Thereby, the user can perceive with tactile sensation that the pointer 12A has entered the display area of the icon 12C.
また、ポインタ12Aがアイコン12Cの表示領域内にあるときも、マウス装置100が表面1Aに対して滑りやすくなり、利用者の手には、マウス装置100が滑りやすくなるような触感が提供される。これにより、利用者はポインタ12Aがアイコン12Cの表示領域にあることを触感で知覚できる。
Further, even when the pointer 12A is within the display area of the icon 12C, the mouse device 100 is easily slipped with respect to the surface 1A, and a tactile sensation that makes the mouse device 100 slippery is provided to the user's hand. . Thereby, the user can perceive by touch that the pointer 12A is in the display area of the icon 12C.
また、ポインタ12Aがアイコン12Cの表示領域から外に出るときは、マウス装置100が表面1Aに対して滑りにくくなることによって、利用者の手には、マウス装置100が突起物に当たったような触感が提供される。これにより、利用者はポインタ12Aがアイコン12Cの表示領域から離れたことを触感で知覚できる。
Further, when the pointer 12A goes out of the display area of the icon 12C, the mouse device 100 is difficult to slide with respect to the surface 1A, so that the mouse device 100 hits the protrusion on the user's hand. A tactile sensation is provided. As a result, the user can perceive the tactile sensation that the pointer 12A has moved away from the display area of the icon 12C.
以上のような振動素子140の駆動制御では、コンピュータシステム10の本体部11(図5参照)の振幅データ出力部540がメモリ550に格納される振幅データをマウス装置100に伝送する。そして、マウス装置100の駆動制御部240が振幅データを振幅変調器320に入力し、振幅変調器320が超音波帯の正弦波信号を振幅データで振幅変調することにより、駆動信号を生成する。この駆動信号によって振動素子140が駆動される。以上のようにして、振動素子140の駆動制御が実現される。
In the drive control of the vibration element 140 as described above, the amplitude data output unit 540 of the main body 11 (see FIG. 5) of the computer system 10 transmits the amplitude data stored in the memory 550 to the mouse device 100. Then, the drive control unit 240 of the mouse device 100 inputs the amplitude data to the amplitude modulator 320, and the amplitude modulator 320 generates a drive signal by amplitude-modulating the sine wave signal of the ultrasonic band with the amplitude data. The vibration element 140 is driven by this drive signal. As described above, drive control of the vibration element 140 is realized.
次に、図15及び図16を用いて、振幅データと振幅データ出力部540の制御処理について説明する。
Next, the control processing of the amplitude data and the amplitude data output unit 540 will be described with reference to FIGS. 15 and 16.
図15は、メモリ550に格納されるデータを示す図である。
FIG. 15 is a diagram showing data stored in the memory 550.
メモリ550に格納されるデータは、アプリケーションの種類を表すデータと、アイコン12Cの表示領域を表す領域データと、振動パターンを表すパターンデータとを関連付けたデータである。領域データは、すべてのアプリケーションにおいて、ディスプレイパネル12に表示されるすべてのGUI操作部、画像を表示する領域、又は、ページ全体を表す領域について存在する。
The data stored in the memory 550 is data in which data representing the type of application, area data representing the display area of the icon 12C, and pattern data representing the vibration pattern are associated with each other. In all applications, the area data exists for all GUI operation units displayed on the display panel 12, an area for displaying an image, or an area representing the entire page.
アプリケーションの種類を表すデータとして、アプリケーションIDを示す。領域データとして、操作入力が行われるGUI操作部等が表示される領域の座標値を表す式f1~f5を示す。また、振動パターンを表すパターンデータとして、Q1~Q5を示す。振動パターンを表すパターンデータは、振幅を表すデータを含んでおり、例えば、図14に示す振動パターンを表す。
· Shows the application ID as data indicating the type of application. As the area data, equations f1 to f5 representing the coordinate values of the area in which the GUI operation unit or the like where the operation input is performed are displayed are shown. Further, Q1 to Q5 are shown as pattern data representing the vibration pattern. The pattern data representing the vibration pattern includes data representing the amplitude, and represents, for example, the vibration pattern shown in FIG.
なお、アプリケーションIDで表されるアプリケーションは、スマートフォン端末機、又は、タブレット型コンピュータで利用可能なあらゆるアプリケーションを含む。
Note that the application represented by the application ID includes any application that can be used on a smartphone terminal or a tablet computer.
図16は、振幅データ出力部540が実行する処理を示すフローチャートである。
FIG. 16 is a flowchart showing processing executed by the amplitude data output unit 540.
本体部11のOS(Operating System)は、所定の制御周期毎に本体部11を駆動するための制御を実行する。このため、振幅データ出力部540は、所定の制御周期毎に演算を行う。
The OS (Operating System) of the main body 11 executes control for driving the main body 11 at every predetermined control cycle. For this reason, the amplitude data output unit 540 performs calculation every predetermined control period.
また、本体部11のOSは、ポインタ12Aが、アイコン12Cの表示領域がに触れているかどうかを判定する。OSは、ポインタ12Aが、アイコン12Cの表示領域に触れている場合には、触れていることを表す信号(アイコン接触信号)を出力する。このような処理は、本体部11の制御部510が実行する。制御部510は、アイコン接触信号を振幅データ出力部540に入力する。
Further, the OS of the main body 11 determines whether the pointer 12A is touching the display area of the icon 12C. When the pointer 12A touches the display area of the icon 12C, the OS outputs a signal indicating that the pointer 12A is touching (icon contact signal). Such processing is executed by the control unit 510 of the main body unit 11. Control unit 510 inputs an icon contact signal to amplitude data output unit 540.
振幅データ出力部540は、本体部11の電源がオンにされることにより、処理をスタートさせる。
The amplitude data output unit 540 starts the process when the main unit 11 is turned on.
振幅データ出力部540は、現在のポインタ12Aの位置を表す位置データと、現在のアプリケーションの種類に関連付けられた領域データを取得する(ステップS21)。
The amplitude data output unit 540 acquires position data indicating the current position of the pointer 12A and area data associated with the current application type (step S21).
振幅データ出力部540は、現在のポインタ12Aの位置が、いずれかの領域データが表す領域内であるかどうかを判定する(ステップS22)。
The amplitude data output unit 540 determines whether or not the current position of the pointer 12A is within the region represented by any region data (step S22).
振幅データ出力部540は、ステップS22で現在のポインタ12Aの位置が、いずれかの領域データが表す領域内である(S22:YES)と判定した場合は、メモリ550から振幅データを読み出して、振幅値を設定する(ステップS23A)。
If the amplitude data output unit 540 determines in step S22 that the current position of the pointer 12A is within the region represented by any of the region data (S22: YES), the amplitude data output unit 540 reads the amplitude data from the memory 550 and determines the amplitude. A value is set (step S23A).
ここで、例えば、現在のポインタ12Aの位置がアイコン12Cの表示領域に入っていたとすると、アイコン12Cの領域データに関連付けられた振動パターンに含まれる振幅データが読み出され、振幅値が設定される。
Here, for example, if the current position of the pointer 12A is within the display area of the icon 12C, the amplitude data included in the vibration pattern associated with the area data of the icon 12C is read and the amplitude value is set. .
振幅データ出力部540は、ステップS23Aで振幅値を設定した振幅データを出力する(ステップS24)。これにより、振幅データ出力部540からマウス装置100に振幅データが伝送され、振幅変調器320は、正弦波発生器310から出力される正弦波の振幅を変調して駆動信号を生成し、駆動信号によって振動素子140が駆動される。
The amplitude data output unit 540 outputs the amplitude data set with the amplitude value in step S23A (step S24). As a result, the amplitude data is transmitted from the amplitude data output unit 540 to the mouse device 100, and the amplitude modulator 320 modulates the amplitude of the sine wave output from the sine wave generator 310 to generate a drive signal. Thus, the vibration element 140 is driven.
一方、ステップS22で現在のポインタ12Aの位置が、いずれかの領域データが表す領域内ではない(S22:NO)ないと判定した場合は、振幅データ出力部540は、振幅値をゼロに設定する(ステップS23B)。
On the other hand, if it is determined in step S22 that the current position of the pointer 12A is not within the region represented by any of the region data (S22: NO), the amplitude data output unit 540 sets the amplitude value to zero. (Step S23B).
この結果、振幅データ出力部540は、ステップS24で振幅値がゼロの振幅データを出力し、振幅変調器320は、正弦波発生器310から出力される正弦波の振幅をゼロに変調した駆動信号を生成する。この場合は、振動素子140は駆動されない。
As a result, the amplitude data output unit 540 outputs amplitude data whose amplitude value is zero in step S24, and the amplitude modulator 320 is a drive signal obtained by modulating the amplitude of the sine wave output from the sine wave generator 310 to zero. Is generated. In this case, the vibration element 140 is not driven.
以上より、ポインタ12Aがアイコン12Cの表示領域内に入るときは、利用者の手には、マウス装置100が滑りやすくなるような触感が提供され、利用者はポインタ12Aがアイコン12Cの表示領域に入ったことを触感で知覚できる。
As described above, when the pointer 12A enters the display area of the icon 12C, a tactile sensation that makes the mouse device 100 slip easily is provided to the user's hand, and the user moves the pointer 12A into the display area of the icon 12C. You can perceive that you have entered.
また、ポインタ12Aがアイコン12Cの表示領域内にあるときも、マウス装置100が滑りやすくなるような触感が提供されるため、利用者はポインタ12Aがアイコン12Cの表示領域にあることを触感で知覚できる。
Further, even when the pointer 12A is within the display area of the icon 12C, a tactile sensation that makes the mouse device 100 slippery is provided, so that the user perceives that the pointer 12A is in the display area of the icon 12C. it can.
また、ポインタ12Aがアイコン12Cの表示領域から外に出るときは、利用者の手には、マウス装置100が突起物に当たったような触感が提供されるため、利用者はポインタ12Aがアイコン12Cの表示領域から離れたことを触感で知覚できる。
Further, when the pointer 12A goes out of the display area of the icon 12C, the user's hand is provided with a tactile sensation as if the mouse device 100 hit the projection, so that the user can move the pointer 12A to the icon 12C. It can be perceived by touch that the user has left the display area.
なお、第2動作例では、ポインタ12Aがアイコンの表示領域に入ったとき、又は、出たときに振動素子140のオン/オフを切り替える形態について説明したが、アイコン以外の様々なGUI操作部とポインタ12Aとの位置関係に応じて振動素子140を駆動してもよい。
In the second operation example, the mode in which the vibration element 140 is switched on / off when the pointer 12A enters or exits the icon display area has been described. The vibration element 140 may be driven according to the positional relationship with the pointer 12A.
図17及び図18は、実施の形態のマウス装置100の第3の動作例を説明する図である。図19は、図17に示す第3の動作例に対応する振動素子140の振動パターンを示す図である。
FIGS. 17 and 18 are diagrams illustrating a third operation example of the mouse device 100 according to the embodiment. FIG. 19 is a diagram showing a vibration pattern of the vibration element 140 corresponding to the third operation example shown in FIG.
図17では、ディスプレイパネル12の画像をスクロールする場合について説明する。
FIG. 17 illustrates a case where the image on the display panel 12 is scrolled.
図17に示すスクロールバー12Dを上下に移動させることによってディスプレイパネル12の画像をスクロールすることができるが、ここでは、キーボード13(図5参照)のCtrlキーを押しながら、円を描くようにマウス装置100を操作することによってディスプレイパネル12の画像をスクロールする場合について説明する。
The image on the display panel 12 can be scrolled by moving the scroll bar 12D shown in FIG. 17 up and down. Here, while holding down the Ctrl key of the keyboard 13 (see FIG. 5), the mouse is drawn like a circle. A case where the image on the display panel 12 is scrolled by operating the device 100 will be described.
Ctrlキーを押しながら、図18に示すように円を描くようにマウス装置100を操作すると、ディスプレイパネル12の画像をスクロールすることができる。
When the mouse device 100 is operated to draw a circle as shown in FIG. 18 while pressing the Ctrl key, the image on the display panel 12 can be scrolled.
例えば、Ctrlキーを押しながら、ポインタ12Aが図18に示すように時計回りに円を描くようにマウス装置100を操作すると、ディスプレイパネル12の画像を上方向にスクロールできることとする。
For example, when the mouse device 100 is operated so that the pointer 12A draws a circle clockwise as shown in FIG. 18 while pressing the Ctrl key, the image on the display panel 12 can be scrolled upward.
Ctrlキーが押された状態で、時刻t31でポインタ12Aが時計回りに円を描くように移動し始め、時刻t32で停止したとする。
Suppose that the pointer 12A starts to move in a clockwise circle at time t31 while the Ctrl key is pressed, and stops at time t32.
このようにポインタ12Aが操作された場合には、振動素子140を駆動する駆動信号の振動パターンは、図19に示すようになる。時刻t31で振幅がゼロからC1になり、直後に振幅がゼロになり、その後、所定の操作量に到達する度に、振幅C2(<C1)で振動素子140が駆動される。
When the pointer 12A is operated in this way, the vibration pattern of the drive signal for driving the vibration element 140 is as shown in FIG. At time t31, the amplitude changes from zero to C1, and immediately after that, the amplitude becomes zero. Then, every time a predetermined operation amount is reached, the vibration element 140 is driven with the amplitude C2 (<C1).
このように振動素子140が駆動されると、プレート120には、スクロール操作を開始した時刻t31で超音波帯の固有振動が発生し、時刻t32でスクロール操作が終了するまで、所定の操作量に到達する度に、振幅C2(<C1)で振動素子140が駆動されることになる。
When the vibration element 140 is driven in this way, the plate 120 is subjected to a natural vibration of the ultrasonic band at the time t31 when the scroll operation is started, and reaches a predetermined operation amount until the scroll operation is finished at the time t32. Each time it reaches, the vibration element 140 is driven with the amplitude C2 (<C1).
スクロール操作を開始した時刻t31に振幅C1で振動素子140が駆動され、その直後に振動素子140がオフにされると、マウス装置100が表面1Aに対して滑りやすい状態から滑りにくい状態になることにより、利用者の手には、マウス装置100が突起物に当たったような触感が提供される。これにより、利用者はスクロールが開始されたことを触感で知覚できる。
When the vibration element 140 is driven with the amplitude C1 at the time t31 when the scroll operation is started and the vibration element 140 is turned off immediately after that, the mouse device 100 becomes slippery from the slippery state with respect to the surface 1A. Thus, the user's hand is provided with a tactile sensation as if the mouse device 100 hit the projection. As a result, the user can perceive that the scrolling has started by tactile sensation.
また、スクロール操作を続けると、操作量が所定量に到達する度に振幅C2で振動素子140が駆動される。振幅C2は、振幅C1よりも小さいので、操作量が所定量に到達する度に、利用者の手には、マウス装置100が小さな突起物に当たったような触感が提供される。これにより、利用者はスクロール操作の操作量が所定量に到達したことを触感で知覚できる。
If the scroll operation is continued, the vibration element 140 is driven with the amplitude C2 every time the operation amount reaches a predetermined amount. Since the amplitude C2 is smaller than the amplitude C1, every time the operation amount reaches a predetermined amount, the user's hand is provided with a tactile sensation as if the mouse device 100 hit a small protrusion. Thereby, the user can perceive with tactile sensation that the operation amount of the scroll operation has reached a predetermined amount.
なお、図18には時計回りにポインタ12Aを移動させることにより、ディスプレイパネル12の画像を上方向にスクロールできる場合について説明したが、Ctrlキーを押しながら、ポインタ12Aが反時計回りに円を描くようにマウス装置100を操作すると、ディスプレイパネル12の画像を下方向にスクロールできることとする。
Although FIG. 18 illustrates the case where the image on the display panel 12 can be scrolled upward by moving the pointer 12A clockwise, the pointer 12A draws a circle counterclockwise while pressing the Ctrl key. When the mouse device 100 is operated as described above, the image on the display panel 12 can be scrolled downward.
以上のような振動素子140の駆動制御では、コンピュータシステム10の本体部11(図5参照)の振幅データ出力部540がメモリ550に格納される振幅データをマウス装置100に伝送する。そして、マウス装置100の駆動制御部240が振幅データを振幅変調器320に出力し、振幅変調器320が振幅データを用いて駆動信号を生成することによって、振動素子140の駆動制御が実現される。
In the drive control of the vibration element 140 as described above, the amplitude data output unit 540 of the main body 11 (see FIG. 5) of the computer system 10 transmits the amplitude data stored in the memory 550 to the mouse device 100. Then, the drive control unit 240 of the mouse device 100 outputs the amplitude data to the amplitude modulator 320, and the amplitude modulator 320 generates a drive signal using the amplitude data, whereby the drive control of the vibration element 140 is realized. .
次に、図20及び図21を用いて、振幅データと振幅データ出力部540の制御処理について説明する。
Next, the control processing of the amplitude data and the amplitude data output unit 540 will be described with reference to FIGS.
図20は、メモリ550に格納されるデータを示す図である。
FIG. 20 is a diagram showing data stored in the memory 550.
メモリ550に格納されるデータは、アプリケーションの種類を表すデータと、所定の操作量を表す操作量データと、振動パターンを表すパターンデータとを関連付けたデータである。操作量データは、図19に示す振幅C2の振動を発生させる所定の操作量を表すデータである。
The data stored in the memory 550 is data in which data representing the type of application, operation amount data representing a predetermined operation amount, and pattern data representing a vibration pattern are associated with each other. The operation amount data is data representing a predetermined operation amount that generates a vibration having an amplitude C2 shown in FIG.
アプリケーションの種類を表すデータとして、アプリケーションIDを示す。操作量データとして、振幅C2の振動を発生させる所定の操作量を表す式S1~S5を示す。また、振動パターンを表すパターンデータとして、R1~R5を示す。振動パターンを表すパターンデータは、振幅を表すデータを含んでおり、例えば、図19に示す振幅C1とC2の振動パターンを表す。
· Shows the application ID as data indicating the type of application. As the operation amount data, equations S1 to S5 representing a predetermined operation amount for generating the vibration with the amplitude C2 are shown. In addition, R1 to R5 are shown as pattern data representing the vibration pattern. The pattern data representing the vibration pattern includes data representing the amplitude, and represents, for example, the vibration pattern having the amplitudes C1 and C2 illustrated in FIG.
図21は、振幅データ出力部540が実行する処理を示すフローチャートである。
FIG. 21 is a flowchart showing processing executed by the amplitude data output unit 540.
本体部11のOS(Operating System)は、所定の制御周期毎に本体部11を駆動するための制御を実行する。このため、振幅データ出力部540は、所定の制御周期毎に演算を行う。
The OS (Operating System) of the main body 11 executes control for driving the main body 11 at every predetermined control cycle. For this reason, the amplitude data output unit 540 performs calculation every predetermined control period.
振幅データ出力部540は、本体部11の電源がオンにされることにより、処理をスタートさせる。
The amplitude data output unit 540 starts the process when the main unit 11 is turned on.
振幅データ出力部540は、Ctrlキーが押されているかどうかを判定する(ステップS31)。Ctrlキーが押されている状態でポインタ12Aが円を描くようにマウス装置100が操作されると、ディスプレイパネル12の画像を上方向又は下方向にスクロールできるからである。なお、ステップS31の処理は、Ctrlキーが押されていると判定するまで繰り返し実行される。
The amplitude data output unit 540 determines whether or not the Ctrl key is pressed (step S31). This is because if the mouse device 100 is operated so that the pointer 12A draws a circle while the Ctrl key is pressed, the image on the display panel 12 can be scrolled upward or downward. Note that the process of step S31 is repeatedly executed until it is determined that the Ctrl key is pressed.
振幅データ出力部540は、Ctrlキーが押されている(S31:YES)と判定すると、スクロールが開始されたかどうかを判定する(ステップS32)。スクロールが開始されたかどうかは、ポインタ12Aの位置が移動したかどうかで判定すればよい。なお、ステップS32の処理は、スクロールが開始されたと判定するまで繰り返し実行される。
When the amplitude data output unit 540 determines that the Ctrl key is pressed (S31: YES), the amplitude data output unit 540 determines whether scrolling has started (step S32). Whether or not scrolling has started can be determined based on whether or not the position of the pointer 12A has moved. Note that the process of step S32 is repeatedly executed until it is determined that scrolling has started.
振幅データ出力部540は、スクロール開始時の振幅値を設定する(ステップS33)。例えば、図19に示す振幅C1が設定される。
The amplitude data output unit 540 sets the amplitude value at the start of scrolling (step S33). For example, the amplitude C1 shown in FIG. 19 is set.
振幅データ出力部540は、ステップS33で振幅値を設定した振幅データを出力する(ステップS34)。これにより、振幅データ出力部540からマウス装置100に振幅データが伝送され、振幅変調器320は、正弦波発生器310から出力される正弦波の振幅を変調して駆動信号を生成し、振動素子140を駆動する。例えば、図19に示す振幅C1で振動素子140が駆動される。
The amplitude data output unit 540 outputs the amplitude data set with the amplitude value in step S33 (step S34). As a result, amplitude data is transmitted from the amplitude data output unit 540 to the mouse device 100, and the amplitude modulator 320 modulates the amplitude of the sine wave output from the sine wave generator 310 to generate a drive signal, and the vibration element 140 is driven. For example, the vibration element 140 is driven with the amplitude C1 shown in FIG.
振幅データ出力部540は、スクロール操作の操作量が所定の操作量に到達したかどうかを判定する(ステップS35)。所定の操作量は、図20に示す操作量データによって予め決定されている。
The amplitude data output unit 540 determines whether or not the operation amount of the scroll operation has reached a predetermined operation amount (step S35). The predetermined operation amount is determined in advance by operation amount data shown in FIG.
振幅データ出力部540は、所定の操作量に到達した(S35:YES)と判定した場合は、メモリ550から振幅データを読み出して、振幅値を設定する(ステップS36A)。
When it is determined that the predetermined operation amount has been reached (S35: YES), the amplitude data output unit 540 reads the amplitude data from the memory 550 and sets the amplitude value (step S36A).
ここで、例えば、スクロール操作を開始してからポインタ12Aの操作量が所定の操作量に到達していたとすると、アプリケーションIDに関連付けられた振動パターンに含まれる振幅データが読み出され、振幅値が設定される。
Here, for example, if the operation amount of the pointer 12A has reached a predetermined operation amount after the scroll operation is started, the amplitude data included in the vibration pattern associated with the application ID is read and the amplitude value is Is set.
振幅データ出力部540は、ステップS36Aで振幅値を設定した振幅データを出力する(ステップS37)。これにより、振幅データ出力部540からマウス装置100に振幅データが伝送され、振幅変調器320は、正弦波発生器310から出力される正弦波の振幅を変調して駆動信号を生成し、振動素子140を駆動する。
The amplitude data output unit 540 outputs the amplitude data for which the amplitude value is set in step S36A (step S37). As a result, amplitude data is transmitted from the amplitude data output unit 540 to the mouse device 100, and the amplitude modulator 320 modulates the amplitude of the sine wave output from the sine wave generator 310 to generate a drive signal, and the vibration element 140 is driven.
一方、ステップS35で所定の操作量に到達していない(S35:NO)と判定した場合は、振幅データ出力部540は、振幅値をゼロに設定する(ステップS36B)。
On the other hand, if it is determined in step S35 that the predetermined operation amount has not been reached (S35: NO), the amplitude data output unit 540 sets the amplitude value to zero (step S36B).
この結果、振幅データ出力部540は、振幅値がゼロの振幅データを出力し、振幅変調器320は、正弦波発生器310から出力される正弦波の振幅をゼロに変調した駆動信号を生成する。このため、この場合は、振動素子140は駆動されない。
As a result, the amplitude data output unit 540 outputs amplitude data having an amplitude value of zero, and the amplitude modulator 320 generates a drive signal in which the amplitude of the sine wave output from the sine wave generator 310 is modulated to zero. . For this reason, in this case, the vibration element 140 is not driven.
ステップS36A又はS36Bの処理が終了すると、振幅データ出力部540は、スクロール操作が終了してかどうかを判定する(ステップS38)。スクロール操作が終了するのは、ポインタ12Aの位置が移動していない場合である。
When the process of step S36A or S36B is completed, the amplitude data output unit 540 determines whether or not the scroll operation is completed (step S38). The scrolling operation ends when the position of the pointer 12A has not moved.
振幅データ出力部540は、スクロール操作が終了していない(S38:NO)と判定すると、フローをステップS35にリターンする。
If the amplitude data output unit 540 determines that the scroll operation has not ended (S38: NO), the flow returns to step S35.
一方、振幅データ出力部540は、スクロール操作が終了している(S38:YES)と判定すると、一連のフローを終了する(エンド)。
On the other hand, if the amplitude data output unit 540 determines that the scroll operation has ended (S38: YES), the series of flows ends (end).
以上より、スクロール操作を開始すると、大きな振幅で振動素子140が駆動され、その直後に振動素子140がオフにされるので、マウス装置100が表面1Aに対して滑りやすい状態から滑りにくい状態になることにより、利用者の手には、マウス装置100が比較的大きな突起物に当たったような触感が提供される。これにより、利用者はスクロールが開始されたことを触感で知覚できる。
As described above, when the scroll operation is started, the vibration element 140 is driven with a large amplitude, and immediately after that, the vibration element 140 is turned off, so that the mouse device 100 becomes slippery from the slippery state with respect to the surface 1A. Thus, a tactile sensation as if the mouse device 100 hit a relatively large protrusion is provided to the user's hand. As a result, the user can perceive that the scrolling has started by tactile sensation.
また、スクロール操作を続けると、操作量が所定量に到達する度に小さな振幅で振動素子140が駆動されるので、操作量が所定量に到達する度に、利用者の手には、マウス装置100が比較的小さな突起物に当たったような触感が提供される。これにより、利用者はスクロール操作の操作量が所定量に到達したことを触感で知覚できる。
Further, if the scroll operation is continued, the vibration element 140 is driven with a small amplitude every time the operation amount reaches the predetermined amount. Therefore, every time the operation amount reaches the predetermined amount, the user's hand holds the mouse device. A tactile sensation such that 100 hits a relatively small protrusion is provided. Thereby, the user can perceive with tactile sensation that the operation amount of the scroll operation has reached a predetermined amount.
なお、振幅C1と振幅C2は、上述したように振幅C1が振幅C2よりも大きい場合に限らず、振幅C1と振幅C2が等しくてもよく、また、振幅C1よりも振幅C2が大きくてもよい。
The amplitude C1 and the amplitude C2 are not limited to the case where the amplitude C1 is larger than the amplitude C2, as described above, and the amplitude C1 and the amplitude C2 may be equal, or the amplitude C2 may be larger than the amplitude C1. .
また、実施の形態の第3動作例では、Ctrlキーを押した状態で、円を描くようにマウス装置100を操作することによってスクロール操作を行う際に、スクロール操作の開始時と、所定の操作量に到達したときに、振動素子140を駆動する形態について説明した。しかしながら、図17に示すスクロールバー12Dをポインタ12Aで移動させる場合に、スクロールバー12Dの移動量が所定量に到達する度に、振動素子140を駆動して触感を提供してもよい。
In the third operation example of the embodiment, when the scroll operation is performed by operating the mouse device 100 so as to draw a circle with the Ctrl key pressed, the scroll operation is started and a predetermined operation is performed. The mode in which the vibration element 140 is driven when the amount is reached has been described. However, when the scroll bar 12D shown in FIG. 17 is moved by the pointer 12A, the vibration element 140 may be driven to provide a tactile sensation every time the amount of movement of the scroll bar 12D reaches a predetermined amount.
なお、第3動作例では、マウス装置100を用いてスクロール操作を行う際に振動素子140のオン/オフを切り替える形態について説明したが、スクロール操作以外の操作時に振動素子140のオン/オフを切り替えるようにしてもよい。
In the third operation example, the mode in which the vibration element 140 is switched on / off when the mouse device 100 is used to perform a scroll operation has been described. However, the vibration element 140 is switched on / off during an operation other than the scroll operation. You may do it.
次に、図22乃至図25を用いて、マウス装置100が行う制御処理について説明する。マウス装置100は、ポインタ12Aの位置及び位置の時間的変化度合に応じて本体部11(図5参照)が振幅データを出力し、マウス装置100が利用者によって物体1に対して押圧されると、押圧センサ170の出力信号に基づいて、以下で説明するように振幅データを増幅して振動素子140を駆動する。
Next, control processing performed by the mouse device 100 will be described with reference to FIGS. 22 to 25. In the mouse device 100, when the main body 11 (see FIG. 5) outputs amplitude data in accordance with the position of the pointer 12A and the temporal change degree of the position, the mouse device 100 is pressed against the object 1 by the user. Based on the output signal of the pressure sensor 170, the amplitude data is amplified and the vibration element 140 is driven as described below.
図22は、実施の形態のマウス装置100の第4の動作例を説明する図である。図23は、図22に示す第4の動作例に対応する振動素子140の振動パターンを示す。振動素子140の振動パターンは、振動素子140を駆動する駆動信号の振幅データを時系列的に並べることによって表されるパターンである。
FIG. 22 is a diagram illustrating a fourth operation example of the mouse device 100 according to the embodiment. FIG. 23 shows a vibration pattern of the vibration element 140 corresponding to the fourth operation example shown in FIG. The vibration pattern of the vibration element 140 is a pattern represented by arranging the amplitude data of the drive signal for driving the vibration element 140 in time series.
図22に示す第4の動作例は、図13に示す第2の動作例と同様にポインタ12Aがアイコン12Cを通過する場合の動作例であり、利用者によってマウス装置100が物体1に対して押圧されて、押圧センサ170の出力信号に基づいて振幅データが増幅される場合の動作例である。
The fourth operation example shown in FIG. 22 is an operation example when the pointer 12A passes the icon 12C as in the second operation example shown in FIG. It is an operation example in the case where the amplitude data is amplified based on the output signal of the pressure sensor 170 when pressed.
図22に示すように、時刻t41でポインタ12Aがアイコン12Cの左側から接近して触れ始め、時刻t42で利用者がマウス装置100を押圧する力が弱まり、時刻t43で利用者がマウス装置100を押圧する力がさらに弱まり、時刻t44でアイコン12Cを触れ終わったとする。
As shown in FIG. 22, at time t41, the pointer 12A starts to approach from the left side of the icon 12C and touches the mouse device 100 at time t42, and at time t43, the user presses the mouse device 100. It is assumed that the pressing force is further weakened and the user has finished touching the icon 12C at time t44.
なお、時刻t41から時刻t42まで利用者がマウス装置100を押圧する力は一定であり、時刻t42から時刻t43まで利用者がマウス装置100を押圧する力は一定であり、時刻t43から時刻t44まで利用者がマウス装置100を押圧する力は、一定である。
Note that the force with which the user presses the mouse device 100 from time t41 to time t42 is constant, and the force with which the user presses the mouse device 100 from time t42 to time t43 is constant, from time t43 to time t44. The force with which the user presses the mouse device 100 is constant.
また、一例として、時刻t42から時刻t43までにマウス装置100が押圧される力は、時刻t41から時刻t42までにマウス装置100が押圧される力の2/3であり、時刻t43から時刻t44までにマウス装置100が押圧される力は、時刻t41から時刻t42までにマウス装置100が押圧される力の1/3であることとする。
As an example, the force with which the mouse device 100 is pressed from time t42 to time t43 is 2/3 of the force with which the mouse device 100 is pressed from time t41 to time t42, and from time t43 to time t44. The force with which the mouse device 100 is pressed is 1/3 of the force with which the mouse device 100 is pressed from time t41 to time t42.
このようにマウス装置100によってポインタ12Aが操作された場合には、振動素子140を駆動する駆動信号の振動パターンは、図23に示す通りである。時刻t41で振幅がゼロからB3になり、時刻t42で振幅がB3からB2に低下し、時刻t43で振幅がB2からB1に低下し、時刻t44で振幅がゼロになる振動パターンになる。
In this way, when the pointer 12A is operated by the mouse device 100, the vibration pattern of the drive signal for driving the vibration element 140 is as shown in FIG. The vibration pattern changes from zero to B3 at time t41, decreases from B3 to B2 at time t42, decreases from B2 to B1 at time t43, and becomes zero at time t44.
このように振動素子140が駆動されると、プレート120には、時刻t41で超音波帯の固有振動が発生し、時刻t42及びt43で段階的に固有振動の振幅が小さくなり、時刻t44で超音波帯の固有振動が発生しなくなる。
When the vibration element 140 is driven in this way, the natural vibration of the ultrasonic band is generated on the plate 120 at the time t41, and the amplitude of the natural vibration is gradually reduced at the times t42 and t43. The natural vibration of the sonic band is not generated.
利用者がマウス装置100を押圧する力が減少したときに、駆動信号の振幅が一定であると、押圧する力が減少したときに動摩擦力が低下するため、利用者がマウス装置100を押圧する手で知覚する触感が軽くなる。
When the force with which the user presses the mouse device 100 decreases, if the amplitude of the drive signal is constant, the dynamic friction force decreases when the pressing force decreases, so the user presses the mouse device 100. The tactile sensation perceived by the hand is lightened.
これとは逆に、利用者がマウス装置100を押圧する力が増大したときに、駆動信号の振幅が一定であると、押圧する力が増大したときに動摩擦力が増大するため、利用者がマウス装置100を押圧する手で知覚する触感が重くなる。
On the contrary, when the force with which the user presses the mouse device 100 increases, if the amplitude of the drive signal is constant, the dynamic friction force increases when the pressing force increases. The tactile sensation perceived by the hand pressing the mouse device 100 becomes heavy.
すなわち、利用者がマウス装置100を押圧する力が変化するときに、駆動信号の振幅が一定であると、押圧する力が変化したときに動摩擦力が変化するため、利用者がマウス装置100を押圧する手で知覚する触感が変化する。
That is, when the force with which the user presses the mouse device 100 changes, if the amplitude of the drive signal is constant, the dynamic frictional force changes when the pressing force changes. The tactile sensation perceived by the pressing hand changes.
このようにマウス装置100を押圧する力が変化するときに、利用者がマウス装置100を押圧する手で知覚する触感が変化すると、利用者が手で知覚する触感が良好ではなくなる場合がある。
If the tactile sensation that the user perceives with the hand that presses the mouse device 100 changes when the force that presses the mouse device 100 changes in this way, the tactile sensation that the user perceives with the hand may not be good.
そこで、実施の形態のマウス装置100は、押圧センサ170の出力信号に基づいてマウス装置100に掛かる押圧力を検出し、押圧力が変化しても、利用者が手で知覚する触感が一定になるように、駆動信号の振幅値を増幅する。
Therefore, the mouse device 100 according to the embodiment detects the pressing force applied to the mouse device 100 based on the output signal of the pressing sensor 170, and the tactile sensation perceived by the user with a hand is constant even when the pressing force changes. Thus, the amplitude value of the drive signal is amplified.
すなわち、マウス装置100に掛かる押圧力が増大すれば、利用者が手で知覚する触感が一定になるように増幅率を増大して、駆動信号の振幅値を増大させる。これとは逆に、マウス装置100に掛かる押圧力が低下すれば、利用者が手で知覚する触感が一定になるように増幅率を低減して、駆動信号の振幅値を低下させる。
That is, if the pressing force applied to the mouse device 100 is increased, the amplification factor is increased so that the tactile sensation perceived by the user is constant, and the amplitude value of the drive signal is increased. On the contrary, if the pressing force applied to the mouse device 100 is reduced, the amplification factor is reduced so that the tactile sensation perceived by the user is constant, and the amplitude value of the drive signal is reduced.
このように、マウス装置100に掛かる押圧力に応じた増幅率を用いて、本体部11(図5参照)が出力する振幅データを増幅する。本体部11が出力する振幅データは、ポインタ12Aの位置及び位置の時間的変化度合に応じて本体部11が設定するものである。
Thus, the amplitude data output from the main body 11 (see FIG. 5) is amplified using the amplification factor according to the pressing force applied to the mouse device 100. The amplitude data output from the main body 11 is set by the main body 11 in accordance with the position of the pointer 12A and the temporal change in position.
なお、図22及び図23では、押圧力が段階的に低下する場合の動作例について説明したが、これとは逆に押圧力が段階的に増大する場合は、利用者が手で知覚する触感が一定になるように増幅率が段階的に増大するため、本体部11が出力する振幅データが段階的に増大するように増幅される。
In FIGS. 22 and 23, the operation example in the case where the pressing force decreases stepwise has been described. On the contrary, when the pressing force increases stepwise, the tactile sensation that the user perceives with his / her hand. Since the amplification factor increases stepwise so that becomes constant, the amplitude data output from the main body 11 is amplified so as to increase stepwise.
また、マウス装置100が駆動信号を振幅する際に用いる増幅率は、1以上の値であっても、1より小さな値であってもよい。増幅率が1以上である場合は、増幅後の駆動信号の振幅は、増幅前の駆動信号の振幅以上になる。一方、増幅率が1よりも小さな値である場合は、増幅後の駆動信号の振幅は、増幅前の駆動信号の振幅よりも小さくなる。
Also, the amplification factor used when the mouse device 100 amplifies the drive signal may be a value of 1 or more or a value smaller than 1. When the amplification factor is 1 or more, the amplitude of the drive signal after amplification is equal to or greater than the amplitude of the drive signal before amplification. On the other hand, when the amplification factor is smaller than 1, the amplitude of the drive signal after amplification is smaller than the amplitude of the drive signal before amplification.
マウス装置100が駆動信号を振幅することにより、図23に示すように、振動素子140の駆動に用いられる駆動信号の振幅が変化すればよい。
When the mouse apparatus 100 amplifies the drive signal, the amplitude of the drive signal used for driving the vibration element 140 may be changed as shown in FIG.
図24は、押圧力と増幅率の関係を表すデータである。このようなデータは、マウス装置100の制御装置200のメモリ250に格納される。
FIG. 24 shows data representing the relationship between the pressing force and the amplification factor. Such data is stored in the memory 250 of the control device 200 of the mouse device 100.
図24に示すデータでは、押圧力を表す押圧力データP1、P2、P3と、増幅率を表す増幅率データAR1、AR2、AR3とがそれぞれ関連付けられている。ここで、押圧力データP1、P2、P3は、それぞれ、押圧センサ170で検出される押圧力を3つの範囲に分類してデジタル化した3段階の押圧力の値を表し、P1<P2<P3である。
In the data shown in FIG. 24, the pressing force data P1, P2, and P3 representing the pressing force are associated with the amplification factor data AR1, AR2, and AR3 representing the amplification factor, respectively. Here, the pressing force data P1, P2, and P3 represent three levels of pressing force values obtained by classifying the pressing force detected by the pressing sensor 170 into three ranges, and P1 <P2 <P3. It is.
また、増幅率データAR1、AR2、AR3が表す増幅率の値は、AR1<AR2<AR3を満たし、かつ、押圧力がP1、P2、P3と段階的に変化した場合に、利用者が手で知覚する触感が一定になるように値が設定されている。
Further, the amplification factor values represented by the amplification factor data AR1, AR2, and AR3 satisfy AR1 <AR2 <AR3, and when the pressing force changes stepwise as P1, P2, and P3, the user manually The value is set so that the perceived tactile sensation is constant.
増幅率データAR1、AR2、AR3は、押圧力がP1、P2、P3のいずれかに変化しても、利用者の手に一定の触感を提供できるように、増幅率が設定されている。より具体的には、押圧力がP1の場合に増幅率データAR1で振幅データが増幅された駆動信号で振動素子140を駆動する場合と、押圧力がP2の場合に増幅率データAR2で振幅データが増幅された駆動信号で振動素子140を駆動する場合と、押圧力がP3の場合に増幅率データAR3で振幅データが増幅された駆動信号で振動素子140を駆動する場合とで、利用者の手に一定の触感を提供できるように、増幅率が設定されている。
In the amplification factor data AR1, AR2, AR3, the amplification factor is set so that a constant tactile sensation can be provided to the user's hand even if the pressing force changes to any one of P1, P2, and P3. More specifically, when the pressing force is P1, the vibration element 140 is driven with a drive signal obtained by amplifying the amplitude data with the amplification factor data AR1, and when the pressing force is P2, the amplitude data with the amplification factor data AR2. When the vibration element 140 is driven by the drive signal amplified by the driving signal, and when the pressing force is P3, the vibration element 140 is driven by the drive signal obtained by amplifying the amplitude data by the amplification factor data AR3. The amplification factor is set so that a constant tactile sensation can be provided to the hand.
ここで、押圧力が変化しても利用者が手で知覚する触感が一定になるようにすることは、押圧力が変化しても、増幅率によって振幅データが増幅された駆動信号で振動素子140を駆動することにより、振動素子140の超音波帯の固有振動の振幅を一定にすることによって実現される。押圧力の変化に対して、振動素子140の超音波帯の固有振動の振幅を一定にすることは、押圧力の変化に対して、振動素子140に流れる電流値を一定にすることで実現される。
Here, even if the pressing force changes, the tactile sensation perceived by the user's hand is constant. Even if the pressing force changes, the vibration element is driven by the drive signal whose amplitude data is amplified by the amplification factor. By driving 140, the amplitude of the natural vibration of the ultrasonic band of the vibration element 140 is made constant. Making the amplitude of the natural vibration of the ultrasonic band of the vibration element 140 constant with respect to the change in the pressing force is realized by making the current value flowing through the vibration element 140 constant with respect to the change in the pressing force. The
なお、押圧力が変化しても利用者が手で知覚する触感を一定にする増幅率は、例えば、マウス装置100に押圧力を加えながら振動素子140を振動させる実験を行うことによって設定すればよい。また、実験の代わりにシミュレーション等で増幅率を求めてもよい。
Note that the amplification factor that makes the tactile sensation perceived by the user's hand constant even when the pressing force changes can be set by performing an experiment in which the vibrating element 140 is vibrated while applying the pressing force to the mouse device 100, for example. Good. Moreover, you may obtain | require an amplification factor by simulation etc. instead of experiment.
また、押圧力データP1、P2、P3は、それぞれ、押圧センサ170で検出される押圧力を3つの範囲に分類してデジタル化した値である。このため、厳密に言えば、押圧力データP1の範囲に分類される最小の押圧力と、押圧力データP1の範囲に分類される最大の押圧力とでは、利用者の手に提供される触感には差が生じる場合がある。これは、押圧力データP2、P3の場合も同様である。
Further, the pressing force data P1, P2, and P3 are values obtained by classifying the pressing forces detected by the pressing sensor 170 into three ranges and digitizing them. For this reason, strictly speaking, the minimum pressing force classified into the range of the pressing force data P1 and the maximum pressing force classified into the range of the pressing force data P1 provide a tactile sensation provided to the user's hand. There may be differences. The same applies to the pressing force data P2 and P3.
従って、押圧力を複数の範囲に分類し、範囲毎に増幅率を設定することによって、利用者の手に一定の触感を提供することは、利用者の手に提供される触感がある一定の範囲内に入るようにすることである。
Therefore, providing a constant tactile sensation to the user's hand by classifying the pressing force into a plurality of ranges and setting an amplification factor for each range is a certain tactile sensation provided to the user's hand. It is to be within the range.
次に、図25を用いて、マウス装置100の主制御部210が実行する処理について説明する。
Next, processing executed by the main control unit 210 of the mouse device 100 will be described with reference to FIG.
図25は、マウス装置100の主制御部210が実行する処理を表すフローチャートである。
FIG. 25 is a flowchart showing processing executed by the main control unit 210 of the mouse device 100.
主制御部210は、マウス装置100の電源が投入されると処理を開始する(スタート)。
The main control unit 210 starts processing when the power of the mouse device 100 is turned on (start).
主制御部210は、マウス装置100に利用者の手が接触したかどうかを判定する(ステップS41)。より具体的には、接触判定部211は、接触センサ150が出力する電圧値に基づいて、利用者の右手の親指がマウス装置100に触れたかどうかを判定する。なお、ステップS41の処理は、マウス装置100に利用者の手が接触した(S41:YES)と判定するまで繰り返し実行される。
The main control unit 210 determines whether or not the user's hand has touched the mouse device 100 (step S41). More specifically, the contact determination unit 211 determines whether the thumb of the right hand of the user has touched the mouse device 100 based on the voltage value output from the contact sensor 150. The process of step S41 is repeatedly executed until it is determined that the user's hand has touched the mouse device 100 (S41: YES).
主制御部210は、マウス装置100に利用者の手が接触した(S41:YES)と判定すると、マウス装置100に掛かる押圧力を検出する(ステップS42)。より具体的には、演算部212は、押圧センサ170が出力する押圧力を表す信号に基づいて押圧力を求める。
If the main control unit 210 determines that the user's hand has touched the mouse device 100 (S41: YES), the main control unit 210 detects the pressing force applied to the mouse device 100 (step S42). More specifically, the calculation unit 212 calculates the pressing force based on a signal representing the pressing force output from the pressing sensor 170.
次いで、主制御部210は、ステップS42で求めた押圧力に対応する増幅率を求める(ステップS43)。より具体的には、演算部212は、ステップS42で求めた押圧力に対応する増幅率を図24に示すデータから求める。
Next, the main control unit 210 obtains an amplification factor corresponding to the pressing force obtained in step S42 (step S43). More specifically, the calculation unit 212 obtains the amplification factor corresponding to the pressing force obtained in step S42 from the data shown in FIG.
次いで、主制御部210は、コンピュータシステム10から振幅データが入力されているかどうかを判定する(ステップS44)。例えば、図9乃至図21を用いて説明したように、マウス装置100によって操作されるポインタ12Aが、振動素子140を駆動する所定の領域等の内部にある場合には、コンピュータシステム10からマウス装置100に振幅データが入力されるからである。
Next, the main control unit 210 determines whether amplitude data is input from the computer system 10 (step S44). For example, as described with reference to FIGS. 9 to 21, when the pointer 12 </ b> A operated by the mouse device 100 is inside a predetermined area or the like that drives the vibration element 140, the computer system 10 starts the mouse device. This is because amplitude data is input to 100.
主制御部210は、振幅データが入力されている(S44:YES)と判定すると、振幅データを増幅率で増幅し、増幅した振幅データを駆動制御部240に出力する(ステップS45)。より具体的には、演算部212は、ステップS43で求めた増幅率を用いて、コンピュータシステム10から入力される振幅データを増幅する。この結果、増幅された振幅データが駆動制御部240から出力され、振動素子140が駆動される。
If the main control unit 210 determines that the amplitude data is input (S44: YES), the main control unit 210 amplifies the amplitude data with the amplification factor, and outputs the amplified amplitude data to the drive control unit 240 (step S45). More specifically, the calculation unit 212 amplifies the amplitude data input from the computer system 10 using the amplification factor obtained in step S43. As a result, the amplified amplitude data is output from the drive control unit 240, and the vibration element 140 is driven.
主制御部210は、ステップS45の処理を終えると、フローをステップS42にリターンする。
The main control part 210 returns a flow to step S42, after finishing the process of step S45.
一方、主制御部210は、振幅データが入力されていない(S44:NO)と判定すると、フローをステップS46に進める。この場合には、振動素子140は駆動されない。なお、ステップS45で振動素子140が駆動されてフローがステップS42にリターンされた後のステップS44において、振幅データが入力されていない(S44:NO)と判定された場合には、コンピュータシステム10から振幅データは入力されないため、振動素子140は駆動されなくなる。
On the other hand, if the main control unit 210 determines that the amplitude data is not input (S44: NO), the flow proceeds to step S46. In this case, the vibration element 140 is not driven. In Step S44 after the vibration element 140 is driven in Step S45 and the flow is returned to Step S42, if it is determined that no amplitude data is input (S44: NO), the computer system 10 Since the amplitude data is not input, the vibration element 140 is not driven.
主制御部210は、マウス装置100に利用者の手が接触したかどうかを判定する(ステップS46)。処理を継続するかどうか判定するためである。
The main control unit 210 determines whether or not the user's hand has touched the mouse device 100 (step S46). This is to determine whether or not to continue the process.
主制御部210は、マウス装置100に利用者の手が接触した(S46:YES)と判定すると、フローをステップS42にリターンする。再び押圧力を検出して増幅率を求めるためである。
If the main control unit 210 determines that the user's hand has touched the mouse device 100 (S46: YES), the main control unit 210 returns the flow to step S42. This is because the pressing force is detected again to obtain the amplification factor.
一方、主制御部210は、マウス装置100に利用者の手が接触していない(S46:NO)と判定すると、フローを終了する(エンド)。マウス装置100の操作は行われていないからである。
On the other hand, when determining that the user's hand is not in contact with the mouse device 100 (S46: NO), the main control unit 210 ends the flow (end). This is because the mouse device 100 is not operated.
以上のように、主制御部210は、上述の制御処理を実行することにより、押圧センサ170の出力信号から押圧力を求め、押圧力に対応する増幅率を求め、コンピュータシステム10から入力される振幅データを増幅する。そして、主制御部210によって増幅された振幅データが駆動制御部240から出力されて、振動素子140が駆動される。
As described above, the main control unit 210 calculates the pressing force from the output signal of the pressing sensor 170 by executing the above-described control process, calculates the amplification factor corresponding to the pressing force, and is input from the computer system 10. Amplify the amplitude data. Then, the amplitude data amplified by the main control unit 210 is output from the drive control unit 240, and the vibration element 140 is driven.
実施の形態のマウス装置100では、プレート120に超音波帯の固有振動が発生すると、スクイーズ効果によってプレート120と物体1の表面1A(図1及び図2参照)との間に空気層が介在し、表面1Aに対するプレート120の動摩擦係数が低下する。
In the mouse device 100 according to the embodiment, when the natural vibration of the ultrasonic band is generated in the plate 120, an air layer is interposed between the plate 120 and the surface 1A of the object 1 (see FIGS. 1 and 2) due to the squeeze effect. The dynamic friction coefficient of the plate 120 with respect to the surface 1A decreases.
また、プレート120に超音波帯の固有振動が発生している状態から、超音波帯の固有振動が発生しない状態に切り替わると、空気層がなくなるため、表面1Aに対するプレート120の動摩擦係数が増大する。
Further, when switching from the state in which the natural vibration of the ultrasonic band is generated in the plate 120 to the state in which the natural vibration of the ultrasonic band is not generated, the air layer disappears, and thus the dynamic friction coefficient of the plate 120 with respect to the surface 1A increases. .
このため、例えば、図22に示す動作例では、時刻t41において、ポインタ12Aがアイコン12Cの表示領域に入るときに、マウス装置100が表面1Aに対して滑りやすくなる。また、時刻t42でマウス装置100を押圧する力が弱まると、図24に示す押圧力と増幅率の関係を表すデータに基づいて押圧力に対応する増幅率が設定されるため、振動素子140の振動の振幅は一定に保たれ、マウス装置100の表面1Aに対する滑りやすさは一定に保持される。押圧力が低下しても、利用者の手に一定の触感を提供するために増幅率が低下するため、振動素子140の振動の振幅は一定に保たれるからである。
For this reason, for example, in the operation example shown in FIG. 22, when the pointer 12A enters the display area of the icon 12C at the time t41, the mouse device 100 becomes slippery with respect to the surface 1A. Further, when the force that presses the mouse device 100 is weakened at time t42, the amplification factor corresponding to the pressing force is set based on the data representing the relationship between the pressing force and the amplification factor shown in FIG. The amplitude of the vibration is kept constant, and the ease of sliding with respect to the surface 1A of the mouse device 100 is kept constant. This is because, even when the pressing force is reduced, the amplification factor is lowered to provide a constant tactile sensation to the user's hand, so that the vibration amplitude of the vibration element 140 is kept constant.
また、時刻t43でマウス装置100を押圧する力がさらに弱まると、図24に示す押圧力と増幅率の関係を表すデータに基づいて押圧力に対応する増幅率が設定されるため、振動素子140の振動の振幅は一定に保たれ、マウス装置100の表面1Aに対する滑りやすさは一定に保持される。押圧力が低下しても、利用者の手に一定の触感を提供するために増幅率が低下するため、振動素子140の振動の振幅は一定に保たれるからである。
Further, when the force that presses the mouse device 100 further weakens at time t43, the amplification factor corresponding to the pressing force is set based on the data representing the relationship between the pressing force and the amplification factor shown in FIG. The amplitude of the vibration of the mouse device 100 is kept constant, and the ease of sliding with respect to the surface 1A of the mouse device 100 is kept constant. This is because, even when the pressing force is reduced, the amplification factor is lowered to provide a constant tactile sensation to the user's hand, so that the vibration amplitude of the vibration element 140 is kept constant.
そして、時刻t44において、ポインタ12Aがアイコン12Cの表示領域から外に出ると、動摩擦力の増大により、マウス装置100が表面1Aに対して滑りにくくなる。
At time t44, when the pointer 12A moves out of the display area of the icon 12C, the mouse device 100 is less likely to slip with respect to the surface 1A due to an increase in dynamic friction force.
従って、ポインタ12Aがアイコン12Cの表示領域内に入るときは、マウス装置100が表面1Aに対して滑りやすくなり、利用者の手には、マウス装置100が滑りやすくなるような触感が提供される。これにより、利用者はポインタ12Aがアイコン12Cの表示領域に入ったことを触感で知覚できる。
Therefore, when the pointer 12A enters the display area of the icon 12C, the mouse device 100 becomes slippery with respect to the surface 1A, and a tactile sensation that makes the mouse device 100 slippery is provided to the user's hand. . Thereby, the user can perceive with tactile sensation that the pointer 12A has entered the display area of the icon 12C.
また、ポインタ12Aがアイコン12Cの表示領域内にあるときにマウス装置100を押圧する力が変化しても、図24に示す押圧力と増幅率の関係を表すデータに基づいて押圧力に対応する増幅率が設定されるため、マウス装置100の表面1Aに対する滑りやすさは一定に保持される。
Further, even if the force for pressing the mouse device 100 changes when the pointer 12A is within the display area of the icon 12C, it corresponds to the pressing force based on the data representing the relationship between the pressing force and the amplification factor shown in FIG. Since the amplification factor is set, the slipperiness with respect to the surface 1A of the mouse device 100 is kept constant.
このため、マウス装置100が表面1Aに対して滑りやすい状態が保持され、マウス装置100を押圧する力が変化しても、利用者の手には、マウス装置100が滑りやすくなるような触感であって、一定の触感が提供される。これにより、利用者はポインタ12Aがアイコン12Cの表示領域にあることを触感で知覚でき、かつ、押圧力が変化しても利用者の手には良好な触感が提供される。
Therefore, the mouse device 100 is kept slippery with respect to the surface 1A, and even if the force for pressing the mouse device 100 changes, the user's hand has a tactile sensation that makes the mouse device 100 slippery. And a certain tactile sensation is provided. Thereby, the user can perceive that the pointer 12A is in the display area of the icon 12C with a tactile sensation, and a good tactile sensation is provided to the user's hand even if the pressing force changes.
また、ポインタ12Aがアイコン12Cの表示領域から外に出るときは、マウス装置100が表面1Aに対して滑りにくくなることによって、利用者の手には、マウス装置100が突起物に当たったような触感が提供される。これにより、利用者はポインタ12Aがアイコン12Cの表示領域から離れたことを触感で知覚できる。なお、このような触感が利用者に提供されるのは、図22に示す動作例以外でも同様である。
Further, when the pointer 12A goes out of the display area of the icon 12C, the mouse device 100 is difficult to slide with respect to the surface 1A, so that the mouse device 100 hits the protrusion on the user's hand. A tactile sensation is provided. As a result, the user can perceive the tactile sensation that the pointer 12A has moved away from the display area of the icon 12C. The tactile sensation is provided to the user in the same manner as in the operation example shown in FIG.
以上のような振動素子140の駆動制御では、コンピュータシステム10の本体部11(図5参照)の振幅データ出力部540が、ポインタ12Aの位置及び位置の変化度合に応じた振幅データをメモリ550から読み出して、マウス装置100に伝送する。
In the drive control of the vibration element 140 as described above, the amplitude data output unit 540 of the main body 11 (see FIG. 5) of the computer system 10 sends the amplitude data corresponding to the position of the pointer 12A and the degree of change from the memory 550. Read out and transmit to the mouse device 100.
そして、マウス装置100の主制御部210が押圧センサ170の出力信号に応じて押圧力を検出し、主制御部210が押圧力に応じた増幅率をメモリ250から読み出す。そして、主制御部210がコンピュータシステム10から伝送される振幅データを増幅し、増幅した振幅データを駆動制御部240に出力する。
Then, the main control unit 210 of the mouse device 100 detects the pressing force according to the output signal of the pressing sensor 170, and the main control unit 210 reads the amplification factor according to the pressing force from the memory 250. Then, the main control unit 210 amplifies the amplitude data transmitted from the computer system 10 and outputs the amplified amplitude data to the drive control unit 240.
そして、さらに、駆動制御部240が振幅データを振幅変調器320に入力し、振幅変調器320が超音波帯の正弦波信号を振幅データで振幅変調することにより、駆動信号を生成する。この駆動信号によって振動素子140が駆動される。以上のようにして、振動素子140の駆動制御が実現される。
Further, the drive controller 240 inputs the amplitude data to the amplitude modulator 320, and the amplitude modulator 320 generates a drive signal by amplitude-modulating the sine wave signal of the ultrasonic band with the amplitude data. The vibration element 140 is driven by this drive signal. As described above, drive control of the vibration element 140 is realized.
なお、ここでは、図13に示す第2の動作例に、押圧力に応じた増幅率で駆動信号の振幅データを増幅する形態について説明したが、図9に示す第1の動作例、及び、図17に示す第3の動作例についても、同様に適用することができる。
In addition, although the form which amplifies the amplitude data of a drive signal with the gain according to a pressing force was demonstrated to the 2nd operation example shown in FIG. 13 here, the 1st operation example shown in FIG. The third operation example shown in FIG. 17 can be similarly applied.
また、以上では、一例として、押圧センサ170で検出される押圧力を3つの範囲に分類してデジタル化した3段階の押圧力の値P1、P2、P3に、それぞれ、増幅率データAR1、AR2、AR3を関連付けた形態について説明した。しかしながら、押圧力は、2段階以上に分類されていればよく、3段階よりも多い段階に分類されていてもよい。
Further, in the above, as an example, the amplification pressure data AR1, AR2 are obtained by dividing the pressures detected by the pressure sensor 170 into three ranges and digitizing the three levels of pressure values P1, P2, P3, respectively. The form in which AR3 is associated has been described. However, the pressing force may be classified into two or more stages and may be classified into more stages than three stages.
また、押圧センサ170で検出される押圧力をパラメータとして、押圧力の増大に応じて増幅率が増大するような数式を用いて増幅率を求め、求めた増幅率で駆動信号の振幅データを増幅してもよい。
Further, using the pressing force detected by the pressing sensor 170 as a parameter, an amplification factor is obtained using a mathematical formula that increases the amplification factor as the pressing force increases, and the amplitude data of the drive signal is amplified with the obtained amplification factor. May be.
以上、実施の形態のマウス装置100は、ポインタ12Aの位置及び位置の移動度合に応じて、プレート120に超音波帯の固有振動を発生させるので、スクイーズ効果を利用して、利用者に良好な触感を提供することができる。
As described above, since the mouse device 100 according to the embodiment generates the natural vibration of the ultrasonic band on the plate 120 according to the position of the pointer 12A and the degree of movement of the position, it is favorable for the user by using the squeeze effect. A tactile sensation can be provided.
スクイーズ効果により、プレート120と物体1の表面1Aとの間にごく薄い空気層が介在するため、マウス装置100を表面1Aに対して移動させると、動摩擦力が低下する。
Due to the squeeze effect, a very thin air layer is interposed between the plate 120 and the surface 1A of the object 1, so that the dynamic friction force is reduced when the mouse device 100 is moved relative to the surface 1A.
このように動摩擦力が低下した状態から、振動素子140をオフにすると、プレート120と物体1の表面1Aとの間に空気層が介在しなくなるため、マウス装置100は表面1Aに対して滑りにくくなり、マウス装置100が凸部に当たったような触感を利用者に提供することができる。
When the vibration element 140 is turned off from the state in which the dynamic friction force is reduced in this way, an air layer is not interposed between the plate 120 and the surface 1A of the object 1, so that the mouse device 100 is difficult to slip with respect to the surface 1A. Thus, it is possible to provide the user with a tactile sensation as if the mouse device 100 hit the convex portion.
また、振動素子140が駆動されているときにマウス装置100を押圧する力が変化しても、図24に示す押圧力と増幅率の関係を表すデータに基づいて押圧力に対応する増幅率が設定されるため、マウス装置100の表面1Aに対する滑りやすさは一定に保持される。
Further, even if the force for pressing the mouse device 100 changes when the vibration element 140 is driven, the amplification factor corresponding to the pressing force is based on the data representing the relationship between the pressing force and the amplification factor shown in FIG. Since it is set, the ease of sliding with respect to the surface 1A of the mouse device 100 is kept constant.
このため、マウス装置100を押圧する力が変化しても、利用者の手には、マウス装置100が滑りやすくなるような触感であって、一定の触感が提供される。従って、押圧力が変化しても利用者の手には良好な触感が提供される。
For this reason, even if the force with which the mouse device 100 is pressed changes, the user's hand is provided with a tactile sensation that makes the mouse device 100 slippery and provides a certain tactile sensation. Therefore, even if the pressing force changes, a good tactile sensation is provided to the user's hand.
以上のように、実施の形態によれば、良好な触感を提供できるマウス装置100を提供することができる。
As described above, according to the embodiment, it is possible to provide the mouse device 100 that can provide a good tactile sensation.
なお、以上では、メモリ550に格納したデータを用いて、本体部11側で振幅データを生成し、振幅データをマウス装置100に伝送し、マウス装置100が振幅データを増幅率を用いて増幅し、増幅された駆動信号で振動素子140を駆動する形態について説明した。
In the above, amplitude data is generated on the main body 11 side using the data stored in the memory 550, the amplitude data is transmitted to the mouse device 100, and the mouse device 100 amplifies the amplitude data using the amplification factor. In the above description, the vibration element 140 is driven by the amplified drive signal.
しかしながら、マウス装置100が移動検出部220で検出する移動方向及び移動量に基づいて、振動素子140を駆動するようにしてもよい。この場合は、本体部11は振動素子140の駆動制御に関与しなくてよい。例えば、特定の移動方向にマウス装置100が移動した場合に振動素子140を所定のパターンで駆動してもよいし、特定の移動量だけマウス装置100が移動した場合に振動素子140を所定のパターンで駆動してもよい。
However, the vibration element 140 may be driven based on the moving direction and the moving amount detected by the movement detecting unit 220 by the mouse device 100. In this case, the main body 11 does not have to be involved in the drive control of the vibration element 140. For example, the vibration element 140 may be driven in a predetermined pattern when the mouse device 100 moves in a specific movement direction, or the vibration element 140 may be driven in a predetermined pattern when the mouse device 100 moves by a specific movement amount. It may be driven by.
また、以上では、マウス装置100に掛かる押圧力に応じた増幅率を求め、本体部11からマウス装置100に入力される振幅データを増幅率を用いて増幅し、増幅された駆動信号で振動素子140を駆動する形態について説明した。
Further, in the above, the amplification factor corresponding to the pressing force applied to the mouse device 100 is obtained, the amplitude data input from the main body 11 to the mouse device 100 is amplified using the amplification factor, and the vibration element is obtained using the amplified drive signal. The mode of driving 140 has been described.
しかしながら、本体部11のメモリ550に、マウス装置100に掛かる押圧力に応じた振幅データを用意しておいてもよい。より具体的には、押圧力のレベルに応じて振幅データが異なる複数種類の図11、図15、及び図20に示す振動パターンのデータを用意しておき、マウス装置100に掛かる押圧力を本体部11に伝送し、本体部11が押圧力に応じた振幅データの振動パターンをマウス装置100に出力してもよい。この場合は、マウス装置100の主制御部210が本体部11から入力される振幅データを増幅しなくてよくなる。
However, amplitude data corresponding to the pressing force applied to the mouse device 100 may be prepared in the memory 550 of the main body 11. More specifically, a plurality of types of vibration pattern data shown in FIGS. 11, 15, and 20 having different amplitude data according to the level of the pressing force are prepared, and the pressing force applied to the mouse device 100 is set to the main body. The vibration pattern of amplitude data corresponding to the pressing force may be output to the mouse device 100. In this case, the main control unit 210 of the mouse device 100 does not have to amplify the amplitude data input from the main body unit 11.
ここで、図26を用いて、実施の形態の第1変形例について説明する。
Here, a first modification of the embodiment will be described with reference to FIG.
第1変形例では、マウス装置100のメモリ250に、図11、図15、及び図20に示すテーブル形式のデータと同様のデータを格納し、マウス装置100側で振幅データを生成する。
In the first modified example, the same data as the table format data shown in FIGS. 11, 15, and 20 is stored in the memory 250 of the mouse device 100, and amplitude data is generated on the mouse device 100 side.
ここでは、図9を援用して説明する。第1変形例では、ハイパーリンクが設定されている単語に、識別子が割り当てられている。このような識別子は、例えば、OSが割り当てるものを用いることができる。
Here, FIG. 9 is used for explanation. In the first modification, an identifier is assigned to a word for which a hyperlink is set. As such an identifier, for example, an identifier assigned by the OS can be used.
図26は、実施の形態の第1変形例のメモリ250に格納されるデータを示す図である。
FIG. 26 is a diagram illustrating data stored in the memory 250 according to the first modification of the embodiment.
メモリ250に格納されるデータは、アプリケーションの種類を表すデータと、リンクIDと、振動パターンを表すパターンデータとを関連付けたデータである。リンクIDは、ハイパーリンクが設定されている単語に割り当てられている識別子である。リンクIDは、識別子出力部の一例としての制御部510が出力する。
The data stored in the memory 250 is data in which data representing the type of application, link ID, and pattern data representing a vibration pattern are associated with each other. The link ID is an identifier assigned to a word for which a hyperlink is set. The link ID is output by the control unit 510 as an example of an identifier output unit.
本体部11の振幅データ出力部540がポインタ12Aが接触したハイパーリンクのリンクIDをマウス装置100に伝送し、駆動制御部240がメモリ250に格納されるデータ(図26)を参照し、アプリケーションIDとリンクIDに対応する振動パターンを読み出す。そして、振動パターンに含まれる振幅データを振幅変調器320に出力する。この結果、振幅変調器320から出力される駆動信号によって振動素子140が駆動される。
The amplitude data output unit 540 of the main body unit 11 transmits the link ID of the hyperlink touched by the pointer 12A to the mouse device 100, and the drive control unit 240 refers to the data (FIG. 26) stored in the memory 250, and the application ID The vibration pattern corresponding to the link ID is read out. Then, the amplitude data included in the vibration pattern is output to the amplitude modulator 320. As a result, the vibration element 140 is driven by the drive signal output from the amplitude modulator 320.
このように、振動パターンを含むテーブル形式のデータをマウス装置100のメモリ250に格納して置いてもよい。
In this way, table format data including vibration patterns may be stored in the memory 250 of the mouse device 100.
振動素子140の駆動方法は、上述した第1動作例と同様であるため、第1変形例によれば、良好な触感を提供できるマウス装置100を提供することができる。
Since the driving method of the vibration element 140 is the same as in the first operation example described above, according to the first modification, it is possible to provide the mouse device 100 that can provide a good tactile sensation.
また、以下で説明する実施の形態の第2変形例のようにしてもよい。
Also, a second modification of the embodiment described below may be used.
図27は、実施の形態の第2変形例のコンピュータシステム10Aの本体部11Aを示す図である。本体部11Aは、図7に示す本体部11から、振幅データ出力部540を取り除いた構成を有する。また、本体部11Aは、第1変形例のマウス装置100と組み合わせて用いる。
FIG. 27 is a diagram illustrating a main body 11A of a computer system 10A according to a second modification of the embodiment. The main body 11A has a configuration in which the amplitude data output unit 540 is removed from the main body 11 shown in FIG. The main body 11A is used in combination with the mouse device 100 of the first modification.
第2変形例では、本体部11Aは、ハイパーリンク接触信号と、ポインタ12Aの座標をマウス装置100に伝送する。そして、マウス装置100は、ハイパーリンク接触信号に基づいて、図12に示す処理を実行することにより、振動素子140を駆動する。また、マウス装置100は、ポインタ12Aの座標を用いて、図16に示す処理を実行する。また、マウス装置100は、ポインタ12Aの座標を用いて、図21に示す処理を実行する。
In the second modification, the main unit 11A transmits the hyperlink contact signal and the coordinates of the pointer 12A to the mouse device 100. Then, the mouse device 100 drives the vibration element 140 by executing the process shown in FIG. 12 based on the hyperlink contact signal. In addition, the mouse device 100 executes the process shown in FIG. 16 using the coordinates of the pointer 12A. Further, the mouse device 100 executes the process shown in FIG. 21 using the coordinates of the pointer 12A.
振動素子140の駆動方法は、上述した第1変形例と同様であるため、第2変形例によれば、良好な触感を提供できるマウス装置100を提供することができる。
Since the driving method of the vibration element 140 is the same as that of the first modified example described above, according to the second modified example, it is possible to provide the mouse device 100 that can provide a good tactile sensation.
図28は、実施の形態の第3変形例のマウス装置100Aを示す図である。
FIG. 28 is a diagram illustrating a mouse device 100A according to a third modification of the embodiment.
マウス装置100Aは、図1乃至図3に示すマウス装置100から、支持板160と押圧センサ170を取り除いた構成を有する。マウス装置100Aは、押圧センサ170の代わりに、振動素子140に流れる電流を検出する電流検出部を含む。
The mouse device 100A has a configuration in which the support plate 160 and the pressure sensor 170 are removed from the mouse device 100 shown in FIGS. The mouse device 100 </ b> A includes a current detection unit that detects a current flowing through the vibration element 140 instead of the press sensor 170.
図29は、実施の形態の第3変形例のマウス装置100Aの構成を示す図である。
FIG. 29 is a diagram illustrating a configuration of a mouse device 100A according to a third modification of the embodiment.
マウス装置100Aは、振動素子140、アンプ141、接触センサ150、電流検出部190、及び制御装置200Aを含む。制御装置200Aは、主制御部210A、移動検出部220、通信部230、駆動制御部240、メモリ250、スイッチ260、正弦波発生器310、及び振幅変調器320を有する。なお、主制御部210Aと駆動制御部240は、制御装置200Aの制御部の一例である。
The mouse device 100A includes a vibration element 140, an amplifier 141, a contact sensor 150, a current detection unit 190, and a control device 200A. The control device 200A includes a main control unit 210A, a movement detection unit 220, a communication unit 230, a drive control unit 240, a memory 250, a switch 260, a sine wave generator 310, and an amplitude modulator 320. The main control unit 210A and the drive control unit 240 are examples of the control unit of the control device 200A.
主制御部210Aは、接触判定部211、演算部212、位相補正部213、振幅比算出部214、及び押圧力算出部215を有する。主制御部210Aは、図31に示す主制御部210に、位相補正部213、振幅比算出部214、及び押圧力算出部215を追加し、演算部212が、押圧力算出部215によって算出される押圧力に応じた増幅率を用いて、振幅データを増幅するようにしたものである。
The main control unit 210A includes a contact determination unit 211, a calculation unit 212, a phase correction unit 213, an amplitude ratio calculation unit 214, and a pressing force calculation unit 215. The main control unit 210A adds a phase correction unit 213, an amplitude ratio calculation unit 214, and a pressing force calculation unit 215 to the main control unit 210 shown in FIG. 31, and the calculation unit 212 is calculated by the pressing force calculation unit 215. The amplitude data is amplified using an amplification factor corresponding to the pressing force.
電流検出部190は、例えば、振幅変調器320とアンプ141を接続する配線に直列に挿入される抵抗器を用いて、抵抗器の両端間電圧を検出し、両端間電圧を抵抗器の抵抗値で除算して電流値を求めるセンサであればよい。
The current detection unit 190 detects the voltage across the resistor using, for example, a resistor inserted in series in the wiring connecting the amplitude modulator 320 and the amplifier 141, and uses the voltage across the resistor as the resistance value of the resistor. Any sensor may be used as long as the current value is obtained by dividing by.
位相補正部213は、振幅変調器320から出力される駆動信号の電圧波形を検出する。マウス装置100Aでは、プレート120に掛かるの押圧力を求める際に、駆動信号の電圧と電流の比を用いる。駆動信号の電圧と電流の比を求める際に、電圧と電流の位相を合わせるために位相補正部213を設けている。
The phase correction unit 213 detects the voltage waveform of the drive signal output from the amplitude modulator 320. In the mouse device 100A, when the pressing force applied to the plate 120 is obtained, the voltage / current ratio of the drive signal is used. A phase correction unit 213 is provided to match the phase of the voltage and current when determining the ratio of the voltage and current of the drive signal.
このため、位相補正部213は、駆動信号の電圧を検出して電圧の位相を補正し、駆動信号の電流の位相に合わせる。振幅変調器320から位相補正部213に入力される駆動信号は、振幅変調器320から出力される駆動信号のうちのごく微小な電流量であり、振幅変調器320からアンプ141に入力される駆動信号に影響を与えることはない。
For this reason, the phase correction unit 213 detects the voltage of the drive signal, corrects the phase of the voltage, and matches the phase of the current of the drive signal. The drive signal input from the amplitude modulator 320 to the phase correction unit 213 is a very small amount of current among the drive signals output from the amplitude modulator 320, and the drive signal input from the amplitude modulator 320 to the amplifier 141. Does not affect the signal.
位相補正部213は、例えば、駆動信号の電圧をデジタル変換するA/D(Analog to Digital)コンバータと、デジタル変換した駆動信号の電圧の位相をシフトするバッファとを含み、駆動信号の電圧の位相を補正する。位相補正部213は、駆動信号の電圧波形の位相を補正し、位相が補正された駆動信号の電圧波形を出力する。
The phase correction unit 213 includes, for example, an A / D (Analog-to-Digital) converter that digitally converts the voltage of the drive signal, and a buffer that shifts the phase of the voltage of the digitally converted drive signal. Correct. The phase correction unit 213 corrects the phase of the voltage waveform of the drive signal and outputs the voltage waveform of the drive signal with the phase corrected.
位相補正部213が駆動信号の電圧の位相を補正するのは、振動素子140が容量型の素子であることから、駆動信号の電圧と電流に位相差が生じる場合があるからである。
The reason why the phase correction unit 213 corrects the phase of the voltage of the drive signal is that the vibration element 140 is a capacitive element, and thus there may be a phase difference between the voltage and current of the drive signal.
位相補正部213が駆動信号の電圧の位相を補正する補正量は、実験及び/又はシミュレーション等で予め求めておけばよい。なお、駆動信号の電圧と電流と位相差が生じない場合には、主制御部210は、位相補正部213を含まなくてもよい。また、ここでは、位相補正部213が駆動信号の電圧の位相を補正する形態について説明するが、位相補正部213を電流検出部190と振幅比算出部214との間に設けて、位相補正部213が駆動信号の電流の位相を補正して、駆動信号の電圧の位相に合わせるようにしてもよい。
The correction amount by which the phase correction unit 213 corrects the phase of the voltage of the drive signal may be obtained in advance through experiments and / or simulations. Note that when the phase difference between the voltage and current of the drive signal does not occur, the main control unit 210 may not include the phase correction unit 213. Here, a mode in which the phase correction unit 213 corrects the phase of the voltage of the drive signal will be described. However, the phase correction unit 213 is provided between the current detection unit 190 and the amplitude ratio calculation unit 214, and the phase correction unit 213 may correct the phase of the current of the drive signal to match the phase of the voltage of the drive signal.
振幅比算出部214は、電流検出部190から入力される電流データをデジタル変換するA/Dコンバータを含む。電流検出部190から入力される電流データは、アナログ値である。
The amplitude ratio calculation unit 214 includes an A / D converter that digitally converts the current data input from the current detection unit 190. The current data input from the current detection unit 190 is an analog value.
振幅比算出部214は、デジタル変換された電流データが表す電流と、位相補正部213によって位相が補正された駆動信号の電圧との比を算出し、押圧力算出部215に出力する。
The amplitude ratio calculation unit 214 calculates a ratio between the current represented by the digitally converted current data and the voltage of the drive signal whose phase is corrected by the phase correction unit 213, and outputs the ratio to the pressing force calculation unit 215.
振幅比算出部214は、デジタル変換された電流データが表す電流の電流波形と、位相が補正された駆動信号の電圧の電圧波形との比を算出する。より具体的には、振幅比算出部214は、デジタル変換された電流データが表す電流の電流波形を、位相が補正された駆動信号の電圧の電圧波形で除算することにより、電流と電圧との比を算出する。なお、振幅比算出部214が算出する比は、第1の比の一例である。
The amplitude ratio calculation unit 214 calculates the ratio between the current waveform of the current represented by the digitally converted current data and the voltage waveform of the voltage of the drive signal whose phase has been corrected. More specifically, the amplitude ratio calculation unit 214 divides the current waveform of the current represented by the digitally converted current data by the voltage waveform of the voltage of the drive signal whose phase has been corrected, to thereby calculate the current and voltage. Calculate the ratio. The ratio calculated by the amplitude ratio calculation unit 214 is an example of a first ratio.
押圧力算出部215は、振幅比算出部214によって算出される比を用いて、プレート120に掛かる押圧力を算出する。押圧力算出部215は、プレート120が押圧されていない状態における駆動信号の電流と電圧との比から、振幅比算出部214によって算出される比を減算し、減算して得る値に所定の係数を乗算することによって押圧力を算出する。
The pressing force calculation unit 215 calculates the pressing force applied to the plate 120 using the ratio calculated by the amplitude ratio calculation unit 214. The pressing force calculation unit 215 subtracts the ratio calculated by the amplitude ratio calculation unit 214 from the ratio between the current and voltage of the drive signal when the plate 120 is not pressed, and subtracts a predetermined coefficient from the value obtained by subtraction. To calculate the pressing force.
押圧力算出部215によって算出される押圧力は、押圧度合の一例である。プレート120が押圧されていない状態における駆動信号の電流と電圧との比は、第2の比の一例である。なお、押圧力の具体的な算出方法と、所定の係数とについては、後述する。
The pressing force calculated by the pressing force calculation unit 215 is an example of the pressing degree. The ratio between the current and voltage of the drive signal in a state where the plate 120 is not pressed is an example of the second ratio. A specific method for calculating the pressing force and the predetermined coefficient will be described later.
図30は、電流検出部190を示す図である。
FIG. 30 is a diagram illustrating the current detection unit 190.
電流検出部190は、抵抗器191と、電流検出IC(Integrated Circuit)192とを有する。抵抗器191は、振幅変調器320とアンプ141を接続する配線に直列に挿入されている。電流検出IC192は、差動アンプと(Analog to Digital Converter)とを有し、抵抗器191の両端間電圧を検出し、両端間電圧を抵抗器191の抵抗値で除算して電流値を求める。求めた電流値を表すデータは、振幅比算出部214に伝送される。
The current detection unit 190 includes a resistor 191 and a current detection IC (Integrated Circuit) 192. The resistor 191 is inserted in series with the wiring connecting the amplitude modulator 320 and the amplifier 141. The current detection IC 192 has a differential amplifier and (Analog to Digital Converter), detects the voltage across the resistor 191, and divides the voltage across the resistor 191 to obtain the current value. Data representing the obtained current value is transmitted to the amplitude ratio calculation unit 214.
図31は、押圧の有無と駆動信号の電圧及び電流との関係を示す図である。
FIG. 31 is a diagram showing the relationship between the presence or absence of pressing and the voltage and current of the drive signal.
図31の(A1)と(B1)に断面で示すマウス装置100Aには、駆動信号の電流を検出する電流検出部190と、駆動制御部240、正弦波発生器310、及び振幅変調器320を纏めた交流源とを示す。図31の(A1)は押圧無しの場合であり、利用者の手はマウス装置100Aに触れているだけで、マウス装置100Aを押圧していない。図31の(B1)は押圧有りの場合であり、利用者の手はマウス装置100AをZ軸負方向に押圧している。なお、断面で示すマウス装置100Aのプレート120に示す波形は、超音波帯の固有振動を模式的に示している。
A mouse device 100A shown in cross section in (A1) and (B1) of FIG. 31 includes a current detection unit 190 that detects the current of the drive signal, a drive control unit 240, a sine wave generator 310, and an amplitude modulator 320. A summary of the AC sources. (A1) in FIG. 31 is a case where there is no pressing, and the user's hand is only touching the mouse device 100A and is not pressing the mouse device 100A. FIG. 31 (B1) shows a case where there is a press, and the user's hand presses the mouse device 100A in the negative Z-axis direction. The waveform shown on the plate 120 of the mouse device 100A shown in cross section schematically shows the natural vibration of the ultrasonic band.
押圧無しの場合には、図31の(A1)に示すように、マウス装置100Aのプレート120には、設計値通りの振幅の超音波帯の固有振動が発生する。このときの駆動信号の電圧Vp1と電流Ip1は、図31の(A2)と(A3)に示す通りである。
When there is no pressing, as shown in (A1) of FIG. 31, the natural vibration of the ultrasonic band having the amplitude as the design value is generated on the plate 120 of the mouse device 100A. The voltage Vp1 and current Ip1 of the drive signal at this time are as shown in (A2) and (A3) of FIG.
これに対して、押圧有りの場合には、図31の(B1)に示すように、マウス装置100Aのプレート120に生じる超音波帯の固有振動の振幅は、押圧無しの場合よりも小さくなる。利用者の手によって押圧されているからである。
On the other hand, when the pressure is applied, the amplitude of the natural vibration of the ultrasonic band generated on the plate 120 of the mouse device 100A is smaller than that without the pressure, as shown in FIG. This is because it is pressed by the user's hand.
このときの駆動信号の電圧Vp2は、図31の(B2)に示すように、押圧無しの場合の電圧Vp1と等しいが、駆動信号の電流Ip2は、図31の(B3)に示すように、押圧無しの場合の電流Ip1よりも減少し、振幅が小さくなる。
The voltage Vp2 of the drive signal at this time is equal to the voltage Vp1 in the case of no pressing as shown in (B2) of FIG. 31, but the current Ip2 of the drive signal is as shown in (B3) of FIG. The current is smaller than the current Ip1 when no pressure is applied, and the amplitude becomes smaller.
振動素子140に流れる電流は、振動素子140の振動の振幅に略比例しており、プレート120が押圧されて超音波帯の固有振動の振幅が小さくなることは、振動素子140の振動の振幅が小さくなることを意味するからである。
The current flowing through the vibration element 140 is substantially proportional to the vibration amplitude of the vibration element 140. The amplitude of the vibration of the vibration element 140 decreases when the plate 120 is pressed and the natural vibration amplitude of the ultrasonic band decreases. This means that it becomes smaller.
図32は、押圧力算出部215が比Ip/Vpを用いて押圧力を算出する場合に用いるテーブル形式のデータの一例を示す。押圧力が0g(ゼログラム)である場合の比Ip0/Vp0から、押圧力が掛かったときの比Ip/Vpを減算した比の差分(Ip0/Vp0-Ip/Vp)と、押圧変換係数PFとを関連付けたデータである。
FIG. 32 shows an example of table format data used when the pressing force calculation unit 215 calculates the pressing force using the ratio Ip / Vp. The ratio difference (Ip0 / Vp0−Ip / Vp) obtained by subtracting the ratio Ip / Vp when the pressing force is applied from the ratio Ip0 / Vp0 when the pressing force is 0 g (zero gram), the pressing conversion coefficient PF, Is the data associated with.
押圧力が0g(ゼログラム)である場合の比Ip0/Vp0から、押圧力が掛かったときの比Ip/Vpを減算した比の差分(Ip0/Vp0-Ip/Vp)を用いるのは、次のような理由による。すなわち、押圧力が0gのときの比Ip0/Vp0を基準にして、押圧力が掛かることによって比Ip/Vpが変化した差分を求めれば、プレート120に掛かる押圧力に対応する比Ip/Vpの変化分を求めることができるからである。
The ratio difference (Ip0 / Vp0−Ip / Vp) obtained by subtracting the ratio Ip / Vp when the pressing force is applied from the ratio Ip0 / Vp0 when the pressing force is 0 g (zero gram) is used as follows. For reasons like this. That is, if a difference in which the ratio Ip / Vp is changed by applying the pressing force is obtained on the basis of the ratio Ip0 / Vp0 when the pressing force is 0 g, the ratio Ip / Vp corresponding to the pressing force applied to the plate 120 is obtained. This is because the change can be obtained.
押圧変換係数PFを用いると、押圧力Fmは次式(3)で求めることができる。
Fm=PF×(Ip0/Vp0-Ip/Vp) (3)
すなわち、押圧変換係数PFは、比の差分(Ip0/Vp0-Ip/Vp)から押圧力Fmを求めるための係数である。 When the pressing conversion coefficient PF is used, the pressing force Fm can be obtained by the following equation (3).
Fm = PF × (Ip0 / Vp0−Ip / Vp) (3)
That is, the pressing conversion coefficient PF is a coefficient for obtaining the pressing force Fm from the ratio difference (Ip0 / Vp0−Ip / Vp).
Fm=PF×(Ip0/Vp0-Ip/Vp) (3)
すなわち、押圧変換係数PFは、比の差分(Ip0/Vp0-Ip/Vp)から押圧力Fmを求めるための係数である。 When the pressing conversion coefficient PF is used, the pressing force Fm can be obtained by the following equation (3).
Fm = PF × (Ip0 / Vp0−Ip / Vp) (3)
That is, the pressing conversion coefficient PF is a coefficient for obtaining the pressing force Fm from the ratio difference (Ip0 / Vp0−Ip / Vp).
図32に示す押圧変換係数PFは、押圧力に対してプレート120が線形的に変形する場合の値である。このため、比の差分(Ip0/Vp0-Ip/Vp)が増大しても、押圧変換係数PFは一定値(25)に設定されている。押圧変換係数PFの値は、プレート120の寸法及び/又はヤング率等の値に応じて、最適な値に設定すればよい。
32 is a value when the plate 120 is linearly deformed with respect to the pressing force. For this reason, even if the ratio difference (Ip0 / Vp0−Ip / Vp) increases, the pressing conversion coefficient PF is set to a constant value (25). The value of the pressing conversion coefficient PF may be set to an optimum value according to the dimension of the plate 120 and / or the value of Young's modulus.
なお、押圧力が0g(ゼログラム)である場合の比Ip0/Vp0を表すデータもメモリ250に格納しておけばよい。
Note that data indicating the ratio Ip0 / Vp0 when the pressing force is 0 g (zero gram) may be stored in the memory 250.
演算部212は、上述のようにして押圧力算出部215によって算出される押圧力に応じた増幅率を、図24に示す押圧力と増幅率の関係を表すデータから求めて、振幅データを増幅すればよい。
The calculation unit 212 obtains the amplification factor corresponding to the pressing force calculated by the pressing force calculation unit 215 as described above from the data representing the relationship between the pressing force and the amplification factor shown in FIG. 24, and amplifies the amplitude data. do it.
次に、図33を用いて、マウス装置100Aの主制御部210Aが実行する処理について説明する。
Next, processing executed by the main control unit 210A of the mouse device 100A will be described with reference to FIG.
図33は、マウス装置100Aの主制御部210Aが実行する処理を表すフローチャートである。
FIG. 33 is a flowchart showing processing executed by the main control unit 210A of the mouse device 100A.
主制御部210Aは、マウス装置100Aの電源が投入されると処理を開始する(スタート)。
The main control unit 210A starts processing when the power of the mouse device 100A is turned on (start).
主制御部210Aは、マウス装置100Aに利用者の手が接触したかどうかを判定する(ステップS51)。より具体的には、接触判定部211は、接触センサ150が出力する電圧値に基づいて、利用者の右手の親指がマウス装置100Aに触れたかどうかを判定する。なお、ステップS51の処理は、マウス装置100Aに利用者の手が接触した(S51:YES)と判定するまで繰り返し実行される。
The main control unit 210A determines whether or not the user's hand has contacted the mouse device 100A (step S51). More specifically, the contact determination unit 211 determines whether or not the thumb of the right hand of the user touches the mouse device 100A based on the voltage value output from the contact sensor 150. Note that the process of step S51 is repeatedly executed until it is determined that the user's hand has contacted the mouse device 100A (S51: YES).
主制御部210Aは、マウス装置100Aに利用者の手が接触した(S51:YES)と判定すると、振動素子140を駆動する(ステップS52)。振動素子140に流れる電流から押圧力を検出するためである。なお、ここでは、押圧力を検出するために振動素子140を駆動するため、例えば、駆動信号の振幅データは、押圧力の検出に必要な最小限の振幅でよい。最小限の振幅データは、利用者の手に触感が殆ど提供されない程度であってよい。
If the main control unit 210A determines that the user's hand has contacted the mouse device 100A (S51: YES), the main control unit 210A drives the vibration element 140 (step S52). This is because the pressing force is detected from the current flowing through the vibration element 140. Here, since the vibration element 140 is driven to detect the pressing force, for example, the amplitude data of the drive signal may be the minimum amplitude necessary for detecting the pressing force. The minimum amplitude data may be such that little touch is provided to the user's hand.
このような振幅データは、押圧力を検出するためのデフォルトの値として、メモリ250に格納しておき、ステップS52で主制御部210Aがメモリ250から読み出せばよい。
Such amplitude data may be stored in the memory 250 as a default value for detecting the pressing force, and the main control unit 210A may read it from the memory 250 in step S52.
主制御部210Aは、振動素子140に流れる電流から押圧力を検出する(ステップS53)。具体的には、まず、位相補正部213が、駆動信号の電圧波形の位相を補正し、位相が補正された駆動信号の電圧波形を出力する。次に、振幅比算出部214が、デジタル変換された電流データが表す電流と、位相補正部213によって位相が補正された駆動信号の電圧との比を算出する。そして、押圧力算出部215が、振幅比算出部214によって算出される比を用いて、プレート120に掛かる押圧力を算出する。
The main control unit 210A detects the pressing force from the current flowing through the vibration element 140 (step S53). Specifically, first, the phase correction unit 213 corrects the phase of the voltage waveform of the drive signal, and outputs the voltage waveform of the drive signal with the phase corrected. Next, the amplitude ratio calculation unit 214 calculates a ratio between the current represented by the digitally converted current data and the voltage of the drive signal whose phase is corrected by the phase correction unit 213. Then, the pressing force calculation unit 215 calculates the pressing force applied to the plate 120 using the ratio calculated by the amplitude ratio calculation unit 214.
なお、主制御部210Aは、ステップS53で振動素子140に流れる電流から押圧力を検出した後であって、ステップS54の処理に進行する前に、振幅データをゼロに設定して振動素子140を駆動しない状態(オフの状態)にしてもよい。
Note that the main control unit 210A sets the amplitude data to zero and sets the vibration element 140 after detecting the pressing force from the current flowing through the vibration element 140 in step S53 and before proceeding to the process of step S54. It may be in a non-driven state (off state).
次いで、主制御部210Aは、ステップS53で求めた押圧力に対応する増幅率を求める(ステップS54)。より具体的には、演算部212は、ステップS53で求めた押圧力に対応する増幅率を図24に示すデータから求める。
Next, the main control unit 210A obtains an amplification factor corresponding to the pressing force obtained in step S53 (step S54). More specifically, the calculation unit 212 obtains the amplification factor corresponding to the pressing force obtained in step S53 from the data shown in FIG.
次いで、主制御部210Aは、コンピュータシステム10から振幅データが入力されているかどうかを判定する(ステップS55)。例えば、図9乃至図21を用いて説明したように、マウス装置100Aによって操作されるポインタ12Aが、振動素子140を駆動する所定の領域等の内部にある場合には、コンピュータシステム10からマウス装置100Aに振幅データが入力されるからである。
Next, the main control unit 210A determines whether amplitude data is input from the computer system 10 (step S55). For example, as described with reference to FIGS. 9 to 21, when the pointer 12 </ b> A operated by the mouse device 100 </ b> A is inside a predetermined area or the like that drives the vibration element 140, the computer system 10 starts the mouse device. This is because the amplitude data is input to 100A.
主制御部210Aは、振幅データが入力されている(S55:YES)と判定すると、振幅データを増幅率で増幅し、増幅した振幅データを駆動制御部240に出力する(ステップS56)。より具体的には、演算部212は、ステップS54で求めた増幅率を用いて、コンピュータシステム10から入力される振幅データを増幅する。この結果、増幅された振幅データが駆動制御部240から出力され、増幅された振幅データによって振動素子140が駆動される。
If the main control unit 210A determines that the amplitude data is input (S55: YES), the main control unit 210A amplifies the amplitude data with the amplification factor, and outputs the amplified amplitude data to the drive control unit 240 (step S56). More specifically, the calculation unit 212 amplifies the amplitude data input from the computer system 10 using the amplification factor obtained in step S54. As a result, the amplified amplitude data is output from the drive control unit 240, and the vibration element 140 is driven by the amplified amplitude data.
主制御部210Aは、ステップS56の処理を終えると、フローをステップS52にリターンする。
Main control part 210A will return a flow to Step S52, after finishing processing of Step S56.
一方、主制御部210Aは、振幅データが入力されていない(S55:NO)と判定すると、フローをステップS57に進める。この場合には、振動素子140は駆動されない。なお、ステップS56で振動素子140が駆動されてフローがステップS52にリターンされた後のステップS55において、振幅データが入力されていない(S55:NO)と判定された場合には、コンピュータシステム10から振幅データは入力されないため、振動素子140は駆動されなくなる。
On the other hand, if the main control unit 210A determines that amplitude data is not input (S55: NO), the flow proceeds to step S57. In this case, the vibration element 140 is not driven. In step S55 after the vibration element 140 is driven in step S56 and the flow is returned to step S52, if it is determined that no amplitude data is input (S55: NO), the computer system 10 Since the amplitude data is not input, the vibration element 140 is not driven.
主制御部210Aは、マウス装置100Aに利用者の手が接触したかどうかを判定する(ステップS57)。処理を継続するかどうか判定するためである。
The main control unit 210A determines whether or not the user's hand has contacted the mouse device 100A (step S57). This is to determine whether or not to continue the process.
主制御部210Aは、マウス装置100Aに利用者の手が接触した(S57:YES)と判定すると、フローをステップS52にリターンする。再び押圧力を検出して増幅率を求めるためである。
If the main control unit 210A determines that the user's hand has touched the mouse device 100A (S57: YES), the flow returns to step S52. This is because the pressing force is detected again to obtain the amplification factor.
一方、主制御部210Aは、マウス装置100Aに利用者の手が接触していない(S57:NO)と判定すると、フローを終了する(エンド)。マウス装置100Aの操作は行われていないからである。
On the other hand, when determining that the user's hand is not in contact with the mouse device 100A (S57: NO), the main control unit 210A ends the flow (end). This is because the mouse device 100A is not operated.
以上のように、主制御部210Aは、上述の制御処理を実行することにより、振動素子140の電流値から押圧力を求め、押圧力に対応する増幅率を求め、コンピュータシステム10から入力される振幅データを増幅する。そして、主制御部210Aによって増幅された振幅データが駆動制御部240から出力されて、振動素子140が駆動される。
As described above, the main control unit 210 </ b> A obtains the pressing force from the current value of the vibration element 140 by executing the above-described control processing, obtains the amplification factor corresponding to the pressing force, and is input from the computer system 10. Amplify the amplitude data. The amplitude data amplified by the main control unit 210A is output from the drive control unit 240, and the vibration element 140 is driven.
以上、実施の形態の第3変形例のマウス装置100Aによれば、実施の形態のマウス装置100(図1乃至図25参照)と同様に、良好な触感を提供できるマウス装置100を提供することができる。
As described above, according to the mouse device 100A of the third modified example of the embodiment, the mouse device 100 that can provide a good tactile sensation is provided, similarly to the mouse device 100 of the embodiment (see FIGS. 1 to 25). Can do.
また、実施の形態の第3変形例のマウス装置100Aは、押圧センサ170を含まずに、振動素子140に流れる電流に基づいて、プレート120に掛かる押圧力を求めることができるので、実施の形態のマウス装置100(図1乃至図25参照)に比べて部品点数を削減することができる。
Further, the mouse device 100A according to the third modified example of the embodiment does not include the pressing sensor 170, and can determine the pressing force applied to the plate 120 based on the current flowing through the vibration element 140. Compared to the mouse device 100 (see FIGS. 1 to 25), the number of parts can be reduced.
以上、本発明の例示的な実施の形態のマウス装置について説明したが、本発明は、具体的に開示された実施の形態に限定されるものではなく、特許請求の範囲から逸脱することなく、種々の変形や変更が可能である。
The mouse device according to the exemplary embodiment of the present invention has been described above. However, the present invention is not limited to the specifically disclosed embodiment, and does not depart from the scope of the claims. Various modifications and changes are possible.
100 マウス装置
110 筐体
111 ホイール
112 左ボタン
114 ケーブル
115 LED
116 センサ
120 プレート
130 両面テープ
140 振動素子
150 接触センサ
160 支持板
170 押圧センサ
180 基板
200、200A 制御装置
210、210A 主制御部
211 接触判定部
212 演算部
213 位相補正部
214 振幅比算出部
215 押圧力算出部
220 移動検出部
230 通信部
240 駆動制御部
250 メモリ
310 正弦波発生器
320 振幅変調器
10 コンピュータシステム
11 本体部
12 ディスプレイパネル
13 キーボード
15 モデム
510 制御部
520 アプリケーションプロセッサ
530 通信部
540 振幅データ出力部
550 メモリ 100Mouse device 110 Case 111 Wheel 112 Left button 114 Cable 115 LED
DESCRIPTION OFSYMBOLS 116 Sensor 120 Plate 130 Double-sided tape 140 Vibration element 150 Contact sensor 160 Support plate 170 Press sensor 180 Substrate 200, 200A Control device 210, 210A Main control part 211 Contact determination part 212 Calculation part 213 Phase correction part 214 Amplitude ratio calculation part 215 Press Pressure calculation unit 220 Movement detection unit 230 Communication unit 240 Drive control unit 250 Memory 310 Sine wave generator 320 Amplitude modulator 10 Computer system 11 Main body unit 12 Display panel 13 Keyboard 15 Modem 510 Control unit 520 Application processor 530 Communication unit 540 Amplitude data Output unit 550 memory
110 筐体
111 ホイール
112 左ボタン
114 ケーブル
115 LED
116 センサ
120 プレート
130 両面テープ
140 振動素子
150 接触センサ
160 支持板
170 押圧センサ
180 基板
200、200A 制御装置
210、210A 主制御部
211 接触判定部
212 演算部
213 位相補正部
214 振幅比算出部
215 押圧力算出部
220 移動検出部
230 通信部
240 駆動制御部
250 メモリ
310 正弦波発生器
320 振幅変調器
10 コンピュータシステム
11 本体部
12 ディスプレイパネル
13 キーボード
15 モデム
510 制御部
520 アプリケーションプロセッサ
530 通信部
540 振幅データ出力部
550 メモリ 100
DESCRIPTION OF
Claims (11)
- 物体の表面に接する接触面を有するプレートと、
前記接触面を表出させて前記プレートを保持し、利用者が手で触れる筐体と、
前記接触面に振動を発生させる振動素子と、
前記プレートが前記物体から押圧される押圧力を検出する押圧検出部と、
前記接触面に超音波帯の固有振動を発生させる駆動信号で前記振動素子を駆動する制御部であって、前記押圧検出部によって検出される前記押圧力に応じて前記駆動信号の振幅を設定する、制御部と
を含み、
前記振幅は、前記押圧力の増大に応じて増大される、マウス装置。 A plate having a contact surface in contact with the surface of the object;
A housing that exposes the contact surface to hold the plate and is touched by a user;
A vibration element for generating vibration on the contact surface;
A pressure detection unit that detects a pressing force with which the plate is pressed from the object;
A control unit that drives the vibration element with a drive signal that generates a natural vibration of an ultrasonic band on the contact surface, and sets an amplitude of the drive signal according to the pressing force detected by the press detection unit. Including a control unit and
The mouse device, wherein the amplitude is increased in response to an increase in the pressing force. - 前記制御部は、前記押圧力に応じて前記駆動信号の振幅を増幅する増幅部を有し、
前記制御部は、前記増幅部で振幅が増幅された駆動信号で前記振動素子を駆動する、請求項1記載のマウス装置。 The control unit has an amplification unit that amplifies the amplitude of the drive signal in accordance with the pressing force,
The mouse device according to claim 1, wherein the control unit drives the vibration element with a drive signal whose amplitude is amplified by the amplification unit. - 前記押圧力と、前記押圧力に応じて前記増幅部が前記駆動信号の振幅を増幅する増幅率とを関連付けた増幅率データを格納する格納部をさらに含み、
前記増幅部は、前記増幅率データから前記押圧力に応じて読み出した増幅率で前記駆動信号の振幅を増幅する、請求項2記載のマウス装置。 A storage unit that stores amplification factor data that associates the pressing force and an amplification factor by which the amplification unit amplifies the amplitude of the drive signal according to the pressing force;
The mouse device according to claim 2, wherein the amplification unit amplifies the amplitude of the drive signal with an amplification factor read out from the amplification factor data according to the pressing force. - 前記筐体の表面又は内部に配設され、利用者の手が前記筐体に触れたかどうかを検出する接触検出部をさらに含み、
前記押圧検出部は、前記接触検出部によって利用者の手が前記筐体に触れたことが検出されると、前記押圧力を検出する、請求項1乃至3のいずれか一項記載のマウス装置。 A contact detection unit that is disposed on or inside the housing and detects whether a user's hand has touched the housing;
The mouse device according to any one of claims 1 to 3, wherein the pressing detection unit detects the pressing force when the contact detection unit detects that a user's hand has touched the housing. . - 前記押圧検出部は、前記プレートに直接的又は間接的に接続され、前記プレートが前記物体から受ける押圧力に応じた電圧又は電流を出力するセンサである、請求項1乃至4のいずれか一項記載のマウス装置。 The said press detection part is a sensor which outputs the voltage or electric current according to the pressing force which the said plate receives from the said object directly or indirectly connected to the said plate. The mouse device described.
- 前記押圧検出部は、
前記制御部から前記振動素子に供給される電流量を検出する電流検出部と、
前記電流検出部によって検出される電流量と、前記駆動信号の電圧値との第1の比に基づいて、前記プレートが前記物体から押圧されているかどうかを判定する押圧判定部と
を有する、請求項1乃至4のいずれか一項記載のマウス装置。 The pressure detection unit
A current detection unit that detects an amount of current supplied from the control unit to the vibration element;
A pressure determination unit that determines whether or not the plate is pressed from the object based on a first ratio between a current amount detected by the current detection unit and a voltage value of the drive signal. Item 5. The mouse device according to any one of Items 1 to 4. - 前記押圧判定部は、前記電流量の基準値と、前記電圧値の基準値との比である第2の比と、前記第1の比との差分に基づいて、前記プレートが押圧される度合を求め、前記度合が第1閾値以上の場合に、前記プレートが前記物体から押圧されていると判定する、請求項6記載のマウス装置。 The pressing determination unit is configured to determine a degree to which the plate is pressed based on a difference between a first ratio and a second ratio that is a ratio between a reference value of the current amount and a reference value of the voltage value. The mouse device according to claim 6, wherein the plate is determined to be pressed from the object when the degree is equal to or greater than a first threshold value.
- 前記押圧判定部は、前記度合が前記第1閾値以上の状態から、前記第1閾値よりも低い第2閾値以下になると、押圧が終了したと判定する、請求項7記載のマウス装置。 The mouse device according to claim 7, wherein the pressing determination unit determines that the pressing is finished when the degree is equal to or lower than the first threshold and is equal to or lower than a second threshold lower than the first threshold.
- 前記押圧判定部は、前記プレートが前記物体からの押圧されることに伴う前記電流量の減少に基づく前記第1の比の変化に基づいて、前記プレートが押圧されているかどうかを判定する、請求項6乃至8のいずれか一項記載のマウス装置。 The pressing determination unit determines whether the plate is pressed based on a change in the first ratio based on a decrease in the amount of current accompanying the pressing of the plate from the object. Item 9. The mouse device according to any one of Items 6 to 8.
- 前記電流検出部によって検出される電流の位相、又は、前記駆動信号の電圧の位相を補正することにより、前記電流の位相と前記電圧の位相とを合わせる位相補正部をさらに含み、
前記押圧判定部は、前記位相補正部によって位相が補正される前記電流の電流量又は前記電圧の電圧値を用いて得られる前記第1の比に基づいて、前記プレートが前記物体から押圧されているかどうかを判定する、請求項6乃至9のいずれか一項記載のマウス装置。 A phase correction unit that adjusts the phase of the current and the phase of the voltage by correcting the phase of the current detected by the current detection unit or the phase of the voltage of the drive signal;
The pressing determination unit is configured such that the plate is pressed from the object based on the first ratio obtained by using a current amount of the current whose phase is corrected by the phase correction unit or a voltage value of the voltage. The mouse device according to claim 6, wherein it is determined whether or not the mouse device is present. - 前記プレート又は前記筐体に配設され、前記表面に対する前記プレート及び前記筐体の移動方向及び移動量を検出する移動検出部をさらに含み、
前記マウス装置は、表示部と、前記移動検出部によって検出される前記移動方向及び前記移動量に基づいて前記表示部に表示されるポインタの位置を求めるポインタ制御部と、前記ポインタの位置及び当該位置の時間的変化度合に応じて前記固有振動の強度が変化する振動パターンの前記駆動信号を出力する駆動信号出力部とを含む情報処理装置に有線又は無線で接続されており、
前記制御部は、前記駆動信号出力部から出力される前記駆動信号で前記振動素子を駆動する、請求項1乃至10のいずれか一項記載のマウス装置。 A movement detection unit disposed on the plate or the housing and detecting a movement direction and a movement amount of the plate and the housing with respect to the surface;
The mouse device includes: a display unit; a pointer control unit that obtains a position of a pointer displayed on the display unit based on the movement direction and the movement amount detected by the movement detection unit; a position of the pointer; Wired or wirelessly connected to an information processing apparatus including a drive signal output unit that outputs the drive signal of a vibration pattern in which the intensity of the natural vibration changes according to the degree of temporal change in position,
The mouse device according to claim 1, wherein the control unit drives the vibration element by the drive signal output from the drive signal output unit.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/071621 WO2017017835A1 (en) | 2015-07-30 | 2015-07-30 | Mouse device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/071621 WO2017017835A1 (en) | 2015-07-30 | 2015-07-30 | Mouse device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017017835A1 true WO2017017835A1 (en) | 2017-02-02 |
Family
ID=57884541
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/071621 WO2017017835A1 (en) | 2015-07-30 | 2015-07-30 | Mouse device |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2017017835A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018206052A (en) * | 2017-06-05 | 2018-12-27 | 株式会社村田製作所 | mouse |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005520233A (en) * | 2002-03-13 | 2005-07-07 | ウェルベルゲン ベヘール ビー.ヴイ. | System for providing an input signal, apparatus for use in the system, and computer input apparatus |
| JP2005332063A (en) * | 2004-05-18 | 2005-12-02 | Sony Corp | Input device with tactile function, information inputting method, and electronic device |
| JP2009294844A (en) * | 2008-06-04 | 2009-12-17 | Saitama Univ | Mouse and mouse pad |
| WO2015045059A1 (en) * | 2013-09-26 | 2015-04-02 | 富士通株式会社 | Drive control apparatus, electronic device, and drive control method |
-
2015
- 2015-07-30 WO PCT/JP2015/071621 patent/WO2017017835A1/en active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005520233A (en) * | 2002-03-13 | 2005-07-07 | ウェルベルゲン ベヘール ビー.ヴイ. | System for providing an input signal, apparatus for use in the system, and computer input apparatus |
| JP2005332063A (en) * | 2004-05-18 | 2005-12-02 | Sony Corp | Input device with tactile function, information inputting method, and electronic device |
| JP2009294844A (en) * | 2008-06-04 | 2009-12-17 | Saitama Univ | Mouse and mouse pad |
| WO2015045059A1 (en) * | 2013-09-26 | 2015-04-02 | 富士通株式会社 | Drive control apparatus, electronic device, and drive control method |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018206052A (en) * | 2017-06-05 | 2018-12-27 | 株式会社村田製作所 | mouse |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101516926B1 (en) | Drive controlling apparatus, electronic device and drive controlling method | |
| WO2010067577A1 (en) | Input device | |
| WO2013186846A1 (en) | Program and electronic device | |
| WO2015121956A1 (en) | Electronic device, and drive control method | |
| JP2004272690A (en) | Coordinate input device, and driving device | |
| WO2015121955A1 (en) | Electronic device, input device, and drive control method | |
| JP2017111462A (en) | Feeling presentation device and feeling presentation method | |
| JP6731866B2 (en) | Control device, input system and control method | |
| WO2015121958A1 (en) | Electronic device, input device, and drive control method for electronic device | |
| US10656716B2 (en) | Control device, input system, and control method | |
| JP6891971B2 (en) | Drive control device, electronic device, and drive control method | |
| US11086435B2 (en) | Drive control device, electronic device, and drive control method | |
| JP6205043B1 (en) | Keyboard, information processing apparatus, feedback method, and program | |
| US10664056B2 (en) | Control device, input system and control method | |
| JP6528086B2 (en) | Electronics | |
| JP6123850B2 (en) | Drive control apparatus, electronic device, and drive control method | |
| WO2017017835A1 (en) | Mouse device | |
| JP2016207128A (en) | Input device, and electronic apparatus | |
| JP6477305B2 (en) | Electronic device and press detection program | |
| JP2018128742A (en) | Control device, input system, and control method | |
| JP6784297B2 (en) | Electronics | |
| JP5841872B2 (en) | Electronics | |
| WO2016092644A1 (en) | Electronic device and drive control method | |
| JP2006079135A (en) | Tactile sense presentation device | |
| JP2010282665A (en) | Input device and method for controlling the same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15899668 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 15899668 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |