WO2016175188A1 - Planetary roller drive-type inscribed planetary gear reduction device - Google Patents
Planetary roller drive-type inscribed planetary gear reduction device Download PDFInfo
- Publication number
- WO2016175188A1 WO2016175188A1 PCT/JP2016/062988 JP2016062988W WO2016175188A1 WO 2016175188 A1 WO2016175188 A1 WO 2016175188A1 JP 2016062988 W JP2016062988 W JP 2016062988W WO 2016175188 A1 WO2016175188 A1 WO 2016175188A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- planetary
- gear
- planetary gear
- planetary roller
- inscribed
- Prior art date
Links
Images












Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H1/00—Toothed gearings for conveying rotary motion
- F16H1/28—Toothed gearings for conveying rotary motion with gears having orbital motion
- F16H1/32—Toothed gearings for conveying rotary motion with gears having orbital motion in which the central axis of the gearing lies inside the periphery of an orbital gear
Definitions
- the present invention uses a planetary roller in place of the eccentric body to transmit power from an eccentric body connected to the input shaft of the inscribed planetary gear speed reducer to the planetary gear.
- the planetary gear can be used as a pressurizing mechanism for the planetary roller while facilitating power transmission from the planetary roller, and the inscribed planetary gear reduction device and the planetary roller are integrated in a small size and
- the present invention relates to a quiet, planetary roller drive type inscribed planetary gear reduction device.
- a communication robot using a relatively small pan head that operates to follow a target for the purpose of voice recording or image recognition, or a stuffed toy that can be held by hand.
- a radio control model or the like requires a quiet, low-vibration actuator that is smaller and lighter, and a reduction gear used for these needs to be low-vibration, low-noise, small and lightweight. Has been.
- spur gears and planetary gears used for such small motor speed reducers for relatively small actuators have the disadvantage of high noise, and when using worm wheels instead of these, The noise is small, but the size is large.
- a planetary gear speed reducer equipped with a planetary gear mechanism may be used as a speed reducer used for a small motor as described above.
- the planetary gear speed reducer for example, as shown in FIG. 14 (A), an internal gear S, a planetary gear P, and a drive shaft C are used, and an output is extracted from the output shaft O.
- a cycloid speed reducer such as “Cyclo Speed Reducer (registered trademark)”.
- the cycloid reduction gear is driven by an eccentric body E connected to a drive shaft C from a motor serving as a drive source (not shown), and the peripheral body driven by the eccentric body E.
- a curved plate P having an external gear
- a frame member S ′ having an external pin Sp functioning as a fixed internal gear that circumscribes the curved plate P
- an internal pin Op inserted through the curved plate P.
- the output shaft O is the main component.
- the eccentric body E is a cam provided eccentrically with respect to the drive shaft C, and a part of the cam circumscribes an eccentric in-vivo contact PH provided at the center of the curved plate P, and
- the curved plate P is revolved within the frame of the fixed internal gear constituted by the outer pin Sp by rotating around the axis of the drive shaft C inside the eccentric body-inscribed portion PH by the drive shaft C. Only the rotation component of the curved plate P by the inner pin Op provided on the output shaft O through the inner pin inscribed portions Ph arranged at equal intervals from the center of the curved plate P. Is extracted to the transmission shaft Os to reduce the rotational speed from the drive shaft and adjust the torque.
- Patent Document 1 Japanese Patent No. 2739071
- an eccentric body such as a cam is directly driven by a motor by a driving force of a small motor or the like, thereby driving a curved plate.
- Patent Document 2 Japanese Patent Laid-Open No. 6-341501
- Patent Document 2 requires a pressurizing mechanism, and the pressurizing mechanism is complicated. Therefore, a small motor or the like is used as a drive source. It has become difficult to apply to the reducer that does.
- Patent Document 2 the invention described in Patent Document 2 is configured so that a pressure contact force for friction drive transmission is generated by elastic deformation of the inner roller 28 having two groove-shaped cross sections.
- the inner roller 28 of the above-mentioned patent document 2 has a bearing 26 between the casing 11 and the cover 25. It is provided in contact with the end face so as to be clamped together with the bearing stand 27 to be supported.
- the roller 28 is mounted by attaching the cover 25 to the casing 11 with the fastening bolt 24, and the inner roller 28 sandwiched between the cover 25 and the casing 11 is pushed in the axial direction.
- the width of the roller 28 is elastically pressed and its inner peripheral surface reduces its radius while forming a crowning deformation.
- Patent Document 2 For a reduction gear that uses a relatively small motor as a drive source. There has been a problem in realizing a reduction gear that can be used in a reduction gear for a small motor having a diameter of about 10 to 20 mm and is quiet, small, and low in cost with a reduction ratio of about 50 to 200.
- the present invention is intended to solve the above-described problems, and relates to a reduction gear (speed reduction device) using the above inscribed planetary gear, and is smaller, lighter, and lower in vibration and noise than in the past. It is an object of the present invention to provide an inscribed planetary gear reduction device with low cost.
- the present invention is provided such that an input shaft connected to a driving source and rotating around an axis, and an outer peripheral surface of the input shaft and a part of the rotating surface are in contact with each other.
- a planetary roller having a rotating shaft parallel to the axis of the input shaft and facing the same direction, a disk-shaped transmission plate formed perpendicular to the input shaft, and an outer edge of the transmission plate from the drive source
- An outer ring formed parallel to the input shaft on the side, and the transmission plate has a plurality of through holes formed at equal intervals so as to surround the center of the transmission plate, Part of the rotating surface of the planetary roller is inscribed on the inner surface, and meshes with a planetary gear having an inner gear formed on the outer surface of the outer ring and an inner gear formed on the outer surface of the outer ring of the planetary gear.
- An output shaft comprising a transmission plate in which a plurality of pins that are partially inscribed in each of the holes and a transmission shaft that is erected on a side opposite to the side on which the pins of the transmission plate are erected,
- the planetary roller drive type inscribed planetary gear speed reduction device is provided.
- the rotating surface of the planetary roller is made of an elastic body, or a part of the outer gear of the frame member facing the inner gear is a shaft of the drive source.
- a rotatable pin having a rotation axis parallel to the center, or by forming the tooth profile of the internal gear on the outer surface of the planetary gear by either an involute tooth profile or a cycloid tooth profile. Can be achieved more effectively.
- the eccentric body required for the conventional inscribed planetary gear reduction device is configured as a planetary roller, both quietness and miniaturization are achieved, and the number of parts is further reduced. It is also possible to decrease.
- the planetary roller mechanism requires a preload according to the output torque, but this mechanism acts on the planetary roller according to the output torque, so when the input / output torque is small, the preload is small and large.
- the preload also increases. For this reason, when the input / output torque is small, the loss caused by the deformation of the planetary roller due to the preload is small, and when the input / output torque is large, the preload is large and a large torque can be transmitted.
- the magnitude of the preload per output torque can be adjusted by the design of the planetary gear.
- an inscribed planetary gear reduction device that is smaller, lighter, and lower in cost, lower in vibration and lower in noise than in the past.
- FIG. 7E is a top view showing another configuration example of the counterweight
- 5F is a top view showing another configuration example of the planetary roller unit.
- (A) is a top view of the planetary gear
- (B) is a side sectional view taken along line AA of (A).
- (A) is a top view of the frame member
- (B) is a side view thereof
- (C) is a top view showing another configuration example of the external gear of the frame member.
- (A) is a top view of the output shaft
- (B) is a side view thereof
- (C) is a bottom view thereof
- (D) is a perspective view thereof.
- (A) is a cross-sectional view of the cross section taken along the line AA shown in FIG.
- FIG. 10 is a diagram showing a planetary gear in the configuration example shown in FIG.
- FIG. 10 is a diagram showing an output shaft in the configuration example shown in FIG. 9, wherein (A) is a perspective view, (B) is a top view, (C) is a side view, and (D) is AA in FIG. It is sectional drawing in a line.
- A) is a mechanism figure of the conventional planetary gear mechanism
- B) is a perspective view of the conventional cycloid reduction mechanism.
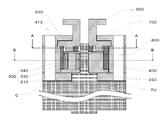
- FIG. 1 is a perspective view showing main components according to an embodiment of the present invention. In the above embodiment of the present invention, these components are combined as shown in the side cross section in FIG. 2 and function as a speed reducer.
- the input shaft C connected to the drive source PU and rotating around the axis is in contact with the side surface of the input shaft C.
- the output shaft 600 for output is a main component.
- the planetary roller 300 is configured as a part of the planetary roller unit 350 in this embodiment, and the planetary roller unit 350 is generally shown in a top view in FIG. It has a form based on a substantially circular plate as shown in a side view in FIG. Note that FIG. 3B also shows a side cross section (portion where hatching is displayed) of a part of the planetary roller 300 as viewed from the AA direction in FIG.
- the planetary roller unit 350 includes a base material 351 made of a disk-shaped engineering plastic or the like, and a planetary roller 300 and a counterweight 353 arranged on the plate surface of the base material 351.
- a through hole 355 through which the input shaft C from the drive source PU passes through the plate surface of the base 351 vertically is provided at the center of the base 351.
- the planetary roller 300 and the counterweight 353 are The through hole 355 is arranged such that its center of gravity is substantially the position of the contrast when viewed from above.
- the diameter of the disk-shaped base material 351 is smaller than the diameter of a circle formed by the inner surface of the outer ring 430 of the planetary gear 400 described later.
- the planetary roller 300 has a generally cylindrical shape with a central axis 310 standing on the plate surface of the base material 351 as a main axis, and is rotatable around the central axis 310.
- a central axis 310 standing on the plate surface of the base material 351 as a main axis, and is rotatable around the central axis 310.
- a ring body 330 made of a metal material such as duralumin
- a contact band 340 made of an elastic body such as an elastomer such as urethane rubber provided around the ring body 330.
- the central axis 310 is located at a position away from the center of the plate surface of the base material 351, and is input to the through hole 355 at the center of the base material 351 in a direction perpendicular to the plate surface of the base material 351.
- the rotating surface of the planetary roller 300 that is parallel to the direction of the axis of the input shaft C and faces the same direction is the outer edge of the contact band 340.
- the main shaft of the central shaft 310 has the erected portion from the base material 351 as a fulcrum. It is desirable to have a certain degree of elasticity in the vertical direction from the main axis toward the upper end.
- the counterweight 353 is erected on the same surface of the base 351 as the planetary roller 300, and surrounds the half side surface of the input shaft C at the string portion with the through hole 355 as the center. It is formed in a semicircular shape so as not to cause interference such as contact with the planetary gear 400 described later, and is basically made of the same material as the base material 351.
- the planetary roller unit 350 configured as described above passes the input shaft C through the through-hole 355, and a contact band 340 constituting a part of the outer surface of the inserted input shaft C and the rotation surface of the planetary roller 300.
- a contact band 340 constituting a part of the outer surface of the inserted input shaft C and the rotation surface of the planetary roller 300.
- the planetary gear 400 is powered by bringing the side surface opposite to the input shaft C of the contact band 340 constituting the rotating surface of the planetary roller 300 into contact with the inner side surface of the outer ring 430 of the planetary gear 400 described later. Can be transmitted.
- the planetary roller unit 350 is composed of the plate surface of the disk-shaped base material 351 and the planetary roller 300 and the counterweight 353 arranged on the plate surface.
- the planetary roller unit 350 is not limited to the above-described configuration, and any configuration is possible as long as the planetary roller 300 can be rotated in contact with the outer surface of the input shaft C.
- the present invention is not limited to those based on the disk shape as described above.
- the planetary roller 300 basically includes the central shaft 310, the ring body 330, and the contact zone 340 as described above.
- the configuration of the planetary roller 300 is not limited thereto, and power can be transmitted from the input shaft C.
- the shaft center of the central shaft 310 has a certain degree of elasticity with a contact portion with the base material 351 as a fulcrum. If so, there is no particular limitation. Therefore, for example, as shown in FIG.
- the ring body 330 and the contact band 340 are integrally formed from an elastic part 370 such as an elastomer made of rubber or the like, or the center shaft 310 and the ring
- an elastic part 370 such as an elastomer made of rubber or the like
- another configuration is adopted in consideration of the frictional force and force transmission efficiency of the planetary roller, such as providing a contact band support ring 390 as shown in FIG. Is also possible.
- the counterweight 353 is intended to suppress vibration by adjusting the mass balance around the input shaft C when the planetary roller 300 is rotated in contact with the outer surface of the input shaft C. Is. Therefore, if the above purpose is achieved, the configuration is not limited to the above form.
- the configuration is not limited to the above form.
- it is configured as an annular ring surrounding the periphery of the through hole 355, and the common center of gravity of the counterweight 353 and the planetary rotor 300 is near the center of the through hole 355 in a top view. You may comprise as follows.
- the present invention is assumed to be used exclusively as a speed reducer using a small drive source, when the planetary roller 300 can be reduced in weight using a small electric motor or the like as the drive source, In some cases, the counterweight 353 is not necessarily provided.
- the base shaft 351 of the planetary roller unit 350 has a substantially fan shape without providing the counterweight 353, and the input shaft
- the planetary roller 300 may be held around C.
- the input shaft C that makes the side surface contact the planetary roller 300 is generally made of metal. Therefore, in order to improve the power transmission efficiency of the contact portion with the planetary roller 300, the portion where the input shaft C is in contact with the planetary roller 300 is subjected to surface treatment such as coating or the portion of the input shaft C. It is also possible to increase the frictional force from the input shaft C to the planetary roller 300 by attaching a thin film made of an elastic body around the shaft.
- the planetary gear 400 includes a top view in FIG. 4 (A) and a side sectional view as seen from the direction AA in FIG. 4 (A).
- a transmission plate 410 which is a circular flat plate
- an outer ring 430 having an internal gear 433 on the outer side is provided so as to surround the periphery. It is comprised by the annular
- the side not sealed with the transmission plate 410 among the above-described annular components is arranged so as to come to the input shaft C side (drive source PU side) when combined with other components. Established.
- the outer diameter of the circular flat plate constituting the transmission plate 410 is formed in consideration of the size of the circumference formed by the external gear 533 formed on the frame member 500 described later. This is because when the diameter of the transmission plate 410 of the planetary gear 400 is made too large so that the eccentricity with respect to the center of the circumference formed by the external gear 533 formed on the frame member 500 is reduced, the planetary gear 400 is used. This is because the planetary motion of can not be. Therefore, the diameter of the circular flat plate that constitutes the transmission plate 410 is such that the planetary gear 400 sequentially moves in planetary motion while meshing with the external gear 533 formed on the frame member 500 by the movement of the planetary roller 300. Is adjusted to the possible range.
- a circular central through hole 415 (not essential) is provided at the center of the transmission plate 410 when viewed from the top surface that vertically penetrates the plate surface of the transmission plate 410, and further surrounds the periphery thereof.
- a plurality of circular inner pin inscribed portions 413 that are circular as viewed from above are provided on the circumference of the transmission plate 410 so as to vertically pass through the plate surface at equal intervals.
- the inner pin inscribed portion 413 is an inner pin provided on an output shaft 600 (to be described later) when the planetary gear 400 performs a planetary motion (rotation) within a frame of an outer gear 533 of the frame 500 (to be described later).
- the object is to circulate the inner peripheral surface of the inner pin inscribed portion 413, which is the circular through hole, while contacting a part of the pin 610. Therefore, the size of the circle constituting the inner pin inscribed portion 413 is determined in consideration of the rotation area of the planetary gear 400 in the frame 500, the size of the inner pin 610, and the like.
- the inner surface of the outer ring 430 is formed as a smooth surface having an appropriate friction coefficient so that the outer peripheral surface of the planetary roller 300 can be contacted and rotated to transmit power.
- the diameter of the circle formed by the inner surface of the outer ring 430 is a radius of the input shaft C so that the planetary roller 300 can be rotated along the inner surface while considering the outer diameter of the transmission plate 410. It is formed to be slightly larger than the size Rr in which Rc and the diameter of the planetary roller 300 are combined.
- an internal gear 433 is formed on the outer surface of the outer ring 430 along the circumferential direction of the outer ring 430.
- the tooth profile is not particularly limited as long as it can mesh with an external gear 533 of the frame 500 described later. Therefore, it may be an involute tooth profile or a cycloid tooth profile, or a tooth profile belonging to these systems but having an adjusted dislocation coefficient or any other tooth profile, or a combination thereof.
- the side surface of the rotation surface of the planetary roller 300 described above is inscribed in the inner surface of the outer ring 430 that configures the planetary gear 400, and further, the outer ring An inner gear 433 formed on the outer surface of the outer ring 430 and an outer gear 533 of the frame 500 described later mesh with each other on the outer surface side of the portion inscribed with the planetary roller 300. Therefore, if the power transmission from the planetary roller 300 to the planetary gear 400 is performed in this way, the form of the internal gear 433 formed on the planetary gear 400 and the external gear 533 of the frame 500 is not particularly limited. Not provided.
- the inner surface of the planetary gear 400 is pressed against the planetary roller 300, so that the internal gear 433 of the planetary gear 400 is one of the external gears 533 of the frame 500.
- the planetary gear 400 sequentially rotates in the outer gear 533 by the rotation of the planetary roller 300, the cycloid is brought into contact with the other portion while meshing only with the portion.
- a deceleration mechanism can be configured.
- the tooth pattern of the external gear 533 is composed of a similar curve that meshes with the above curve, and the number of teeth of the external gear 533 is n + 1 so that a large speed reduction is achieved while suppressing the interference of the tooth tips. It is also possible to obtain a ratio.
- the frame body 500 and the planetary gear 400 are also formed in a relatively small size, and the slipperiness of an elastomer such as plastic made of these materials is often good.
- the tooth profile is determined in consideration of the characteristics of equipment and materials used.
- the frame member 500 has a large through hole at the center as a whole as shown in a top view in FIG. 5 (A) and a side view in FIG. 5 (B).
- 530 and the small through-hole 550 adjacent to it are formed in the shape of a flat plate, and the material thereof is formed of engineering plastic or the like, similar to the base material 351 constituting the planetary roller unit 350.
- An outer gear 533 is formed on the inner peripheral surface of the large through-hole 530 in the central portion, and the planetary gear 400 moves while rotating in a substantially circumference formed by the outer gear 533. It has become.
- the two small through holes 550 provided adjacent to the large through hole 530 are for inserting screws (not shown) for fixing the frame member 500 to the drive source PU. Therefore, in the present embodiment, as illustrated in FIG. 1, each component of the present embodiment is accommodated between a later-described fixing plate 700 and the driving source PU, and the through-hole 550 is accommodated in the fixing plate 700.
- the components of the present invention can be functionally accommodated by inserting the screws in the direction of the drive source PU from the upper surface of the through-hole 750 provided in the same manner as above and screwing the screws to the drive source PU. Is possible.
- the external gear 533 formed on the inner peripheral surface of the large through hole 530 is formed so as to mesh with the internal gear 433 formed on the outer ring 430 of the planetary gear 400.
- the tooth profile of the external gear 533 is not particularly limited for the same reason as described above with respect to the internal gear 433, and therefore may be an involute tooth profile, a cycloid tooth profile, or another tooth profile.
- the number of teeth of the external gear 533 is at least one more than that of the internal gear 433 formed on the outer ring 430 of the planetary gear 400. As will be described later, the number of teeth of the planetary roller 300 and the input shaft C is increased. By considering the aperture ratio and the like together, it is possible to obtain a reduction ratio according to the difference.
- the outer gear 533 is not limited to the form in which the inner peripheral surface of the through hole 530 is formed as the involute tooth shape, the cycloid tooth shape, or other tooth shapes as described above, and a top view of a portion corresponding to FIG.
- a plurality of rollers (pins) 533R having a rotation axis parallel to the axis of the input shaft C and facing the same direction with respect to the contact portion of the inner surface of the external gear 533 with the planetary gear 400.
- You may comprise by. And especially when it is set as such a form, when using this invention for a cycloid reduction mechanism, the internal gear 433 formed in the said planetary gear 400 and the external gear 533 formed in the frame member 500 mesh. It is possible to reduce the resistance caused by the interference and tooth tip interference.
- the planetary gear 400 is sequentially meshed with the outer gear 533 along the inner side of the outer gear 533 that is formed in a substantially circumferential shape. It is possible to revolve while rotating, thereby facilitating extraction of output from the output shaft 600 described later.
- the output shaft 600 includes a top view in FIG. 6A, a side view in FIG. 6B, a bottom view in FIG. 6C, and a bottom view in FIG.
- a disc-shaped transmission plate 610, a plurality of cylindrical inner pins 630 erected from the transmission plate 610, and the inner pins 630 of the transmission plate 610 are erected.
- the transmission shaft is erected from the center of the opposite side of the plate surface, and the material thereof is formed of engineering plastic or the like, similar to the base material 351 and the frame member 500 constituting the planetary roller unit 350. Has been.
- the plurality of inner pins 630 are provided in the same number as the plurality of inner pin inscribed portions 413 provided on the planetary gear 400, and the inner pins 630 are centered on the center of the transmission plate 610. Are provided at equal intervals on the circumference. Further, the inner pin 630 basically has a cylindrical shape, and the length of the cylindrical portion of the cylindrical shape constituting the inner pin 630 is such that the output shaft 600 is connected to the planet as shown in FIG. When combined from above the gear 400, it is formed in such a length that it can be inscribed in the inner pin inscribed portion 413 formed on the planetary gear 400, and its diameter is in the inner pin provided in the planetary gear 400. It is formed to such an extent that it can circulate along the inner periphery of the contact portion 413.
- the transmission shaft 650 of the output shaft 600 is erected on the plate surface opposite to the side where the inner pin 630 is provided from the center of the shape of the disk forming the transmission plate 610,
- the shaft center of the transmission shaft 650 is arranged on an extension line concentric with the shaft center of the input shaft C when the components of the present invention are combined as shown in FIG.
- the output shaft 600 is configured as described above, so that the rotation and revolution motions of the planetary gear 400 are performed along the inner periphery of the inner pin inscribed portion 413 provided on the planetary gear 400. It is possible to take out only the rotation component by the inner pin 630 rotating around, and as a result, take out the output of the adjusted rotation speed and torque on the same axis as the input shaft C by the transmission shaft 650. Is possible.
- the output shaft 600 is for the purpose of extracting only the rotation motion from the planetary motion of the planetary gear 400, so that the output shaft 600 is not limited to the above as long as it has the same function. It is also possible.
- the fixing plate 700 and the spacer 790 are provided as described in FIG.
- the fixing plate 700 functionally accommodates each component of the present invention, and a through hole 730 is provided at the center and another through hole 750 is provided on the outer peripheral side of the through hole 730. It has a flat plate shape as a whole. And the material is comprised from engineering plastics etc. similarly to the said frame member 500 grade
- the transmission shaft 650 of the shaft 600 is configured to be inserted, but the transmission plate 610 of the output shaft 600 is configured not to be inserted.
- the spacer 790 is disposed between the upper surface side of the planetary roller unit 350 having the planetary roller 300 and the planetary gear 400 so that the two components can be smoothly moved. It is formed in a circular flat plate shape having a through hole in the center for assisting proper movement. However, in the above embodiment, the spacer 790 is disposed between the upper surface side of the planetary roller unit 350 and the planetary gear 400 as described above. You may arrange
- the spacer 790 is not necessarily an essential component of the present invention, the spacer 790 is omitted in consideration of the degree and size of the output of the drive source PU or the slipperiness (lubricity) of the engineering plastic used as a material. It is also possible.
- the drive source PU is not limited to this, and depending on the type of mechanical device such as an actuator that uses the speed reducer. Any selection is possible.
- the present invention provides a planetary roller drive type planetary gear speed reduction device that can realize a reduction in size because the preloading mechanism required for the conventional planetary roller mechanism can be omitted.
- the planetary roller mechanism requires a preload corresponding to the output torque.
- the preload corresponding to the output torque acts on the planetary roller.
- the preload decreases and increases, the preload increases.
- the magnitude of the preload per output torque can be adjusted by the design of the planetary gear.
- the planetary roller 300 that rotates in contact with the outer peripheral surface of the input shaft C and the outer periphery of the planetary roller 300 are described.
- a planetary gear 400 having an outer ring 430 rotating with a part of the surface inscribed therein, and an inner gear 433 formed on the outer surface of the outer ring 430 of the planetary gear 400 mesh with the planetary gear 400 along the inner circumference.
- Frame member 500 having an external gear 533 capable of performing planetary motion, and an output shaft 600 that can output only the rotational component extracted from the planetary motion of the planetary gear 400.
- the power transmitted as the rotation of the input shaft C from the drive source PU is provided inside the frame member 500 from the planetary roller 300 via the inner surface of the outer ring 430 of the planetary gear 400.
- the inner pin 630 provided on the output shaft 600 is converted into the planetary movement of the planetary gear 400 within the frame of the outer gear 533 and provided on the inner periphery of the inner pin inscribed portion 413 provided on the planetary gear 400.
- FIG. 7A is a cross-sectional view of the portion taken along the line AA in the side cross-sectional view shown in FIG. 2
- FIG. 3 is a cross-sectional view of a portion taken along line BB in the side cross-sectional view shown in FIG.
- FIG. 7B in order to facilitate understanding of the present invention, only the planetary gear 400 and the input shaft C are hatched, and the other parts are not shown.
- the radial force (arrow A in the figure) generated in the planetary gear 400 is used as a preload.
- the inner surface of the outer ring 430 of the planetary gear 400 is used as the outer roller of the planetary roller mechanism.
- the planetary roller 300 presses the planetary gear 400 against the external gear 533 formed inside the frame member 500 as shown in FIG. Accordingly, a radial force (arrow A in FIG. 7A) is generated, and this force is applied to the planetary roller 300 as indicated by arrow B in FIG. 7B.
- the reduction ratio by the planetary roller is such that the radius of the input shaft C is Rc and the rotation of the planetary roller 300 from the axis of the input shaft C is as shown in FIG.
- Rp the distance to the portion where the side surface of the planetary gear 400 contacts the inner surface of the outer ring 430 of the planetary gear 400 (where the contact portion does not slip)
- Rp the distance to the portion where the side surface of the planetary gear 400 contacts the inner surface of the outer ring 430 of the planetary gear 400 (where the contact portion does not slip)
- the reduction ratio between the planetary gear 400 and the frame member 500 is such that the number of teeth of the internal gear 433 formed on the outer ring 430 of the planetary gear 400 is Zc, as shown in FIG. Assuming that the number of teeth of 533 is Zd, it is as follows.
- n [(Rp / Rc) +1] ⁇ [Zc by (reduction ratio by the planetary roller) ⁇ (reduction ratio by the planetary gear 400 and the frame member 500). / (Zd-Zc)] is obtained.
- a small electric motor is used.
- n a reduction ratio n of approximately 119 is obtained.
- the above embodiment of the present invention shows an example of the configuration example of the present invention, and the present invention is not limited to the above example, and is within the scope equivalent to the basic components of the present invention. Naturally, modifications that can be implemented by a trader are also included in the present invention.
- the internal gear 433 formed on the planetary gear 400 and the external gear 533 formed on the frame 500 are partially engaged with each other, but are not in contact with each other.
- the planetary gear 800 is formed with an epitrochoid curve or the like as shown in FIGS. 8 (A) and 8 (B).
- FIG. 9 is a perspective view schematically showing different configuration examples of the planetary gear, the output shaft, and the frame member constituting the present invention as described above, and FIG. 10 shows a state in which these are combined. It is a sectional side view. Further, FIG. 9 shows a state in which some components are removed for easy understanding.
- FIG. 9 is a perspective view in FIG. 11 (A), a top view in FIG. 11 (B), a side view in FIG. 11 (C), and a line AA in FIG.
- a planetary gear 940 showing a sectional view, a perspective view in FIG. 12A, a top view in FIG. 12B, a frame member 950 as shown in a side view in FIG. 12C, and a perspective view in FIG. (B) is a top view, (C) is a side view, and (D) is a cross-sectional view taken along the line AA of FIG. is there.
- an outer ring 943 having gears with different numbers of teeth in two upper and lower stages composed of an upper stage 943U and a lower stage 943D on the outer surface of the planetary gear 940 shown in FIG. 11, which is a component of the present invention.
- the external gear 953 of the frame member 950 shown in FIG. 12 and the output shaft 960 in FIG. 13 are formed.
- the basic configuration of the planetary roller 300 of the present invention and the inner side surface of the planetary gear 940 have the same configuration as the above-described embodiment.
- the lower stage 943 ⁇ / b> D of the outer ring 943 of the planetary gear 940 corresponds to the frame member 950. It meshes with the inside of the external gear 953 formed inside and rotates within the circumference formed by the external gear 953. Then, the portion of the upper stage 943U of the outer ring 943 of the planetary gear 940 also rotates.
- the side surface of the upper stage 943U is an output shaft separately formed inside the transmission plate 961 constituting the output shaft 960.
- the gear 963 is engaged with the gear 963, whereby the output shaft 960 can extract the rotation component of the movement of the planetary gear 940 and obtain an output from the transmission shaft 965.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Retarders (AREA)
- Friction Gearing (AREA)
Abstract
[Problem] To provide a small-sized, lightweight, and inexpensive inscribed planetary gear reduction device that has lower levels of vibration and noise than in the prior art. [Solution] This inscribed planetary gear reduction device is configured from: a planetary roller (300) that turns while in contact with the outer peripheral surface of an input shaft (C); a planetary gear (400) having an outer ring (430) that turns with the outer periphery of the planetary roller (300) inscribed thereon; a frame member (500) having a fixed outer gear (533) capable of meshing with an inner gear (433) formed in the outside surface of the outer ring (430) and allowing the planetary gear (400) to move in planetary motion along the inner periphery; and an output shaft (600) capable of extracting and outputting only the revolution component from the motion of the planetary gear (400).
Description
本発明は、内接式遊星歯車減速装置の入力軸に接続される偏心体から遊星歯車への動力の伝達を、前記偏心体に代えて遊星ローラを用いると共に、前記遊星歯車の形態を、前記遊星ローラからの動力伝達を容易にすると同時に前記遊星歯車を前記遊星ローラへの与圧機構として利用できるようにして、前記内接式遊星歯車減速装置と前記遊星ローラとを一体化した、小型かつ静粛な、遊星ローラ駆動型内接式遊星歯車減速装置に関するものである。
The present invention uses a planetary roller in place of the eccentric body to transmit power from an eccentric body connected to the input shaft of the inscribed planetary gear speed reducer to the planetary gear. The planetary gear can be used as a pressurizing mechanism for the planetary roller while facilitating power transmission from the planetary roller, and the inscribed planetary gear reduction device and the planetary roller are integrated in a small size and The present invention relates to a quiet, planetary roller drive type inscribed planetary gear reduction device.
従来から、モータ等の駆動源の主軸の回転を通して駆動力が伝達される機械装置では、上記駆動源からの動力に対して、減速機や変速機などを接続し、上記機械装置の特性に適合するように、上記駆動源からの主軸の回転数やトルクの調整等を行うことが一般的である。
Conventionally, in a mechanical device in which driving force is transmitted through the rotation of the main shaft of a driving source such as a motor, a speed reducer, a transmission, etc. are connected to the power from the driving source to meet the characteristics of the mechanical device. Thus, it is common to adjust the rotational speed and torque of the main shaft from the drive source.
そして、そうした機械装置のうち、例えば、音声収録や画像認識等を目的として対象に追従するために動作する比較的小型の雲台や、手持ち可能な程度の大きさのぬいぐるみなどを用いたコミュニケーションロボット、或いは、ラジオコントロールの模型等では、静粛で低振動であり、更に小型軽量なアクチュエータが求められており、これらに使用される減速機も、低振動かつ低騒音で小型軽量なものが必要とされている。
Among such mechanical devices, for example, a communication robot using a relatively small pan head that operates to follow a target for the purpose of voice recording or image recognition, or a stuffed toy that can be held by hand. Or, a radio control model or the like requires a quiet, low-vibration actuator that is smaller and lighter, and a reduction gear used for these needs to be low-vibration, low-noise, small and lightweight. Has been.
しかし、このような比較的小型なアクチュエータ用の小型モータ用減速機に用いられている平歯車や遊星歯車等は、騒音が大きいという欠点があり、これらに代えてウォームホイールを用いた場合には、騒音は小さくなるが、サイズが大きくなるという欠点があった。
However, spur gears and planetary gears used for such small motor speed reducers for relatively small actuators have the disadvantage of high noise, and when using worm wheels instead of these, The noise is small, but the size is large.
また、上記の様な小型モータ等に用いられる減速機として遊星歯車機構を備えた遊星歯車減速機が用いられる場合が有る。上記遊星歯車減速機としては、例えば、図14(A)に示したような、内噛歯車Sと遊星歯車Pと駆動軸Cとからなり、出力軸Oから出力を取り出す、S-P-C式の減速機構などが知られており、こうした遊星歯車機構を備えた減速機の一つとして、例えば、サイクロイド減速機(商品名として「サイクロ減速機(登録商標)」等)などがある。
Also, a planetary gear speed reducer equipped with a planetary gear mechanism may be used as a speed reducer used for a small motor as described above. As the planetary gear speed reducer, for example, as shown in FIG. 14 (A), an internal gear S, a planetary gear P, and a drive shaft C are used, and an output is extracted from the output shaft O. As one of the speed reducers equipped with such a planetary gear mechanism, there is, for example, a cycloid speed reducer (such as “Cyclo Speed Reducer (registered trademark)”).
上記サイクロイド減速機は、図14(B)に示したように、例えば、駆動源(図示しない)となるモータからの駆動軸Cに接続される偏心体Eと、上記偏心体Eにより駆動し周縁に外噛歯車を有する曲線板Pと、上記曲線板Pが外接する固定内噛歯車として機能する外ピンSpを有する枠部材S’と、前記曲線板Pに挿通される内ピンOpが備えられた出力軸Oとを主要構成要素としている。
As shown in FIG. 14B, the cycloid reduction gear is driven by an eccentric body E connected to a drive shaft C from a motor serving as a drive source (not shown), and the peripheral body driven by the eccentric body E. A curved plate P having an external gear, a frame member S ′ having an external pin Sp functioning as a fixed internal gear that circumscribes the curved plate P, and an internal pin Op inserted through the curved plate P. The output shaft O is the main component.
そして、上記偏心体Eは、上記駆動軸Cに偏心して設けられたカムであり、上記カムの一部が上記曲線板Pの中心部に設けられた偏心体内接部PHに外接して、上記駆動軸Cによって上記偏心体内接部PHの内側で上記駆動軸Cの軸心を中心に回動することにより上記曲線板Pを上記外ピンSpにより構成される固定内噛歯車の枠内で公転と自転とを行わせ、上記曲線板Pの中心から等間隔に配列された内ピン内接部Phを介して、上記出力軸Oに設けられた内ピンOpにより上記曲線板Pの自転成分のみを伝達軸Osに取り出すことにより、駆動軸からの回転数の減速とトルクとの調整を行っている。そして、こうした減速機の一例として、特許第2739071号公報(特許文献1)などが開示されている。
The eccentric body E is a cam provided eccentrically with respect to the drive shaft C, and a part of the cam circumscribes an eccentric in-vivo contact PH provided at the center of the curved plate P, and The curved plate P is revolved within the frame of the fixed internal gear constituted by the outer pin Sp by rotating around the axis of the drive shaft C inside the eccentric body-inscribed portion PH by the drive shaft C. Only the rotation component of the curved plate P by the inner pin Op provided on the output shaft O through the inner pin inscribed portions Ph arranged at equal intervals from the center of the curved plate P. Is extracted to the transmission shaft Os to reduce the rotational speed from the drive shaft and adjust the torque. As an example of such a reduction gear, Japanese Patent No. 2739071 (Patent Document 1) is disclosed.
このようにして用いられるサイクロイド減速機では、上記のように、小型モータなどの駆動力により、カムなどの偏心体を直接モータで駆動し、これにより曲線板を駆動している。
In the cycloid reducer used in this way, as described above, an eccentric body such as a cam is directly driven by a motor by a driving force of a small motor or the like, thereby driving a curved plate.
しかし、上記のような従来のサイクロイド減速機では、上記偏心体により上記曲線板を直接駆動するために、上記小型モータなどの駆動力が小さい場合には、上記曲線板が始動しにくく、また、こうした偏心体の回転数が高くなると振動と騒音とが大きくなるという課題があった。
However, in the conventional cycloid reducer as described above, since the curved plate is directly driven by the eccentric body, when the driving force of the small motor or the like is small, the curved plate is difficult to start, When the rotational speed of such an eccentric body is increased, there is a problem that vibration and noise increase.
そのため、こうした課題を解決するために、例えば、特開平6-341501号公報(特許文献2)に示された遊星ローラ減速装置などが開示されている。
Therefore, in order to solve such a problem, for example, a planetary roller reduction device disclosed in Japanese Patent Laid-Open No. 6-341501 (Patent Document 2) is disclosed.
上記特許文献2に開示された技術では、上記偏心体の代わりに、入力軸と軸心を共通とする太陽ローラを用いている。そのため、上記太陽ローラの周囲に複数の遊星ローラを配する機構とすることで、始動の問題を解決できる可能性があり、また、上記遊星ローラを用いることにより、上記太陽ローラ周りに遊星歯車機構を配設する場合よりも、騒音の問題を解決できる可能性がある。
In the technique disclosed in Patent Document 2, a sun roller having a common input shaft and shaft center is used instead of the eccentric body. Therefore, there is a possibility that the problem of starting can be solved by using a mechanism in which a plurality of planetary rollers are arranged around the sun roller, and a planetary gear mechanism around the sun roller by using the planetary roller. There is a possibility that the problem of noise can be solved rather than the case where the antenna is provided.
しかし、一般的に、上記特許文献2に開示されているような、従来の遊星ローラ機構は、与圧機構が必要となり、上記与圧機構は複雑化しているため、小型モータ等を駆動源とする減速機に適用することが難しくなっている。
However, in general, the conventional planetary roller mechanism as disclosed in Patent Document 2 requires a pressurizing mechanism, and the pressurizing mechanism is complicated. Therefore, a small motor or the like is used as a drive source. It has become difficult to apply to the reducer that does.
すなわち、上記遊星ローラ機構では、上記遊星ローラを太陽ローラ等に予め接触させて、摩擦により接線力を伝達させることにより、上記ローラを相互に回動させる機構となっているため、上記与圧機構が必須の構成要素となっている。
That is, in the planetary roller mechanism, since the planetary roller is brought into contact with the sun roller or the like in advance and the tangential force is transmitted by friction, the rollers are rotated with each other. Is an essential component.
そして、例えば、上記特許文献2に記載された発明では、2個の溝形断面をなす内ローラ28の弾性変形によって摩擦駆動伝達のための圧接力が発生するように構成されている。
For example, the invention described in Patent Document 2 is configured so that a pressure contact force for friction drive transmission is generated by elastic deformation of the inner roller 28 having two groove-shaped cross sections.
更に具体的には、上記特許文献2の上記内ローラ28は、上記特許文献2の図1及び第14段落乃至第15段落の記載を参照すると、ケーシング11とカバー25との間に軸受26を支える軸受台27と共に挟圧されるように端面を接して設けられている。そして、上記ローラ28は、締付ボルト24によってカバー25がケーシング11に取り付けられることで装着され、このカバー25とケーシング11との間に挟持された内ローラ28は軸方向に押され、この内ローラ28の幅は弾性的に押し締められてその内周面はクラウニング変形を形成しながら半径を縮小する。これによって、遊星ローラ21との接触点ではクラウニング変形に対応したローラ圧接力が発生し、摩擦による駆動力の伝達を行うことが可能となって、入力軸12側から出力軸13側へ動力が伝達されるようになっている。
More specifically, referring to FIG. 1 and the description of the 14th to 15th paragraphs of the above-mentioned patent document 2, the inner roller 28 of the above-mentioned patent document 2 has a bearing 26 between the casing 11 and the cover 25. It is provided in contact with the end face so as to be clamped together with the bearing stand 27 to be supported. The roller 28 is mounted by attaching the cover 25 to the casing 11 with the fastening bolt 24, and the inner roller 28 sandwiched between the cover 25 and the casing 11 is pushed in the axial direction. The width of the roller 28 is elastically pressed and its inner peripheral surface reduces its radius while forming a crowning deformation. As a result, a roller pressing force corresponding to the crowning deformation is generated at the contact point with the planetary roller 21, and it becomes possible to transmit the driving force by friction, and the power is transferred from the input shaft 12 side to the output shaft 13 side. It is to be transmitted.
そのため、上記特許文献2に開示された技術では、上記のように圧接力を発生させ調整するための機構が複雑化しており、それに応じて部品点数も多くなり高コスト化している他、点検と調整も必要とされる。
For this reason, in the technique disclosed in Patent Document 2, the mechanism for generating and adjusting the pressure contact force is complicated as described above, and the number of parts is accordingly increased and the cost is increased. Adjustment is also required.
したがって、上記特許文献2に記載されたような構成を比較的小型のモータを駆動源とする減速機に対して用いることは困難であり、特に小型軽量のアクチュエータに使用されるような、例えば、直径10~20mm程度の小型モータ用減速機で利用可能で、減速比50~200程度の静粛、小型、低コストである減速機を実現することには課題があった。
Therefore, it is difficult to use the configuration described in Patent Document 2 for a reduction gear that uses a relatively small motor as a drive source. There has been a problem in realizing a reduction gear that can be used in a reduction gear for a small motor having a diameter of about 10 to 20 mm and is quiet, small, and low in cost with a reduction ratio of about 50 to 200.
そこで、本発明は上記のような課題の解決を目的としたものであり、上記内接式遊星歯車を用いる減速機(減速装置)に関し、従来よりも、低振動かつ低騒音で小型軽量かつ低コストの内接式遊星歯車減速装置を提供することを目的とする。
Accordingly, the present invention is intended to solve the above-described problems, and relates to a reduction gear (speed reduction device) using the above inscribed planetary gear, and is smaller, lighter, and lower in vibration and noise than in the past. It is an object of the present invention to provide an inscribed planetary gear reduction device with low cost.
上記課題を解決するために、本発明は、駆動源に接続され、軸心を中心に回転する入力軸と、前記入力軸の外周面と回転面の一部が相互に接するように設けた、前記入力軸の軸心と平行で同一の方向を向いた回転軸を有する遊星ローラと、前記入力軸に対して垂直に形成された円板状の伝動板と前記伝動板の外縁から前記駆動源側に前記入力軸に対して平行に形成された外輪とからなり、前記伝動板には、前記伝動板の中心を取り囲むように等間隔に形成された複数の貫通孔を有し、前記外輪の内側面に前記遊星ローラの回転面の一部が内接し、前記外輪の外側面に内歯車が形成された遊星歯車と、前記遊星歯車の前記外輪の外側面に形成された内歯車と噛合する外歯車を有する枠部材と、前記遊星歯車の前記伝動板に形成された複数の貫通孔のそれぞれに一部で内接する複数のピンが立設された伝達板と前記伝達板の前記ピンが立設された側とは反対側に立設された伝達軸とからなる出力軸と、により構成されることを特徴とする遊星ローラ駆動型内接式遊星歯車減速装置を提供する。
In order to solve the above problems, the present invention is provided such that an input shaft connected to a driving source and rotating around an axis, and an outer peripheral surface of the input shaft and a part of the rotating surface are in contact with each other. A planetary roller having a rotating shaft parallel to the axis of the input shaft and facing the same direction, a disk-shaped transmission plate formed perpendicular to the input shaft, and an outer edge of the transmission plate from the drive source An outer ring formed parallel to the input shaft on the side, and the transmission plate has a plurality of through holes formed at equal intervals so as to surround the center of the transmission plate, Part of the rotating surface of the planetary roller is inscribed on the inner surface, and meshes with a planetary gear having an inner gear formed on the outer surface of the outer ring and an inner gear formed on the outer surface of the outer ring of the planetary gear. A frame member having an external gear, and a plurality of through holes formed on the transmission plate of the planetary gear. An output shaft comprising a transmission plate in which a plurality of pins that are partially inscribed in each of the holes and a transmission shaft that is erected on a side opposite to the side on which the pins of the transmission plate are erected, The planetary roller drive type inscribed planetary gear speed reduction device is provided.
また、上記課題の解決は、前記遊星ローラの回転面は弾性体により構成されることにより、或いは、前記枠部材の外歯車の前記内歯車に面した側の一部は、前記駆動源の軸心と平行な回転軸を有する回転可能なピンにより形成されることにより、或いは、前記遊星歯車の外側面に形成される内歯車の歯形はインボリュート歯形又はサイクロイド歯形のいずれかにより形成されることにより、更に効果的に達成される。
Further, the solution to the above problem is that the rotating surface of the planetary roller is made of an elastic body, or a part of the outer gear of the frame member facing the inner gear is a shaft of the drive source. By being formed by a rotatable pin having a rotation axis parallel to the center, or by forming the tooth profile of the internal gear on the outer surface of the planetary gear by either an involute tooth profile or a cycloid tooth profile. Can be achieved more effectively.
上記の様な構成からなる本発明では、従来の内接式遊星歯車減速装置に必要とされていた偏心体を遊星ローラとして構成したため、静粛化と小型化とを両立し、更に、部品点数を減少することも可能となっている。
In the present invention configured as described above, since the eccentric body required for the conventional inscribed planetary gear reduction device is configured as a planetary roller, both quietness and miniaturization are achieved, and the number of parts is further reduced. It is also possible to decrease.
また、上記遊星ローラへの与圧機構が小型化を阻んでいたところ、上記のように構成した遊星歯車が発生する半径方向の力が与圧機構として働くことを発見したため、与圧機構を省略することが可能となり、更に一層の小型化を実現することが可能となっている。
In addition, when the pressurizing mechanism to the planetary roller was hindering the miniaturization, it was discovered that the radial force generated by the planetary gear configured as described above works as the pressurizing mechanism, so the pressurizing mechanism was omitted. It is possible to achieve further miniaturization.
すなわち、遊星ローラ機構には、出力トルクに応じた予圧が必要だが、本機構では出力トルクに応じた予圧が遊星ローラに働くため、入出力トルクが小さい場合には、予圧が小さくなり、大きい場合には、予圧も大きくなる。このため、入出力トルクが小さい場合には予圧による上記遊星ローラの変形により生じる損失が小さく、入出力トルクが大きい場合には予圧も大きくなり大トルクの伝達が可能になる。そして、出力トルクあたりの予圧の大きさは、遊星歯車の設計により調節することが可能である。
In other words, the planetary roller mechanism requires a preload according to the output torque, but this mechanism acts on the planetary roller according to the output torque, so when the input / output torque is small, the preload is small and large. The preload also increases. For this reason, when the input / output torque is small, the loss caused by the deformation of the planetary roller due to the preload is small, and when the input / output torque is large, the preload is large and a large torque can be transmitted. The magnitude of the preload per output torque can be adjusted by the design of the planetary gear.
そのため、本発明によれば、従来よりも、低振動かつ低騒音で小型軽量かつ低コストの内接式遊星歯車減速装置を提供することが可能である。
Therefore, according to the present invention, it is possible to provide an inscribed planetary gear reduction device that is smaller, lighter, and lower in cost, lower in vibration and lower in noise than in the past.
以下に、本発明の実施形態について、図面に基づいて説明する。なお、上記図面においては、同一又は類似する構造又は機能を有する部材については、同一又は類似する番号を付している場合が有り、共通の部材や要素については一部の表示や説明を省略する場合が有る。また、各構成要素や各構成要素間の大きさの比率などについても、実際のものと表示が異なる場合が有る。
Hereinafter, embodiments of the present invention will be described with reference to the drawings. In the above drawings, members having the same or similar structure or function may be given the same or similar numbers, and some of the common members and elements are not shown or described. There are cases. In addition, the display of the constituent elements and the ratio of the sizes between the constituent elements may be different from the actual ones.
図1は、本発明の実施形態に係る主要な構成要素を示した斜視図である。本発明の上記実施形態では、これらの構成要素が、図2に側断面で示したように組み合わされて、減速装置として機能する。
FIG. 1 is a perspective view showing main components according to an embodiment of the present invention. In the above embodiment of the present invention, these components are combined as shown in the side cross section in FIG. 2 and function as a speed reducer.
上記図1及び図2で示したように、本発明の上記実施形態では、駆動源PUに接続され軸心を中心に回転する入力軸Cと、上記入力軸Cに対して側面を接触して回動する遊星ローラ300と、上記遊星ローラ300が外輪430の内側面で回動することにより駆動し、上記外輪430の外側面に内歯車433が形成された遊星歯車400と、上記遊星歯車400の内歯車433が内側で内接するように形成された外歯車533を有する枠部材500と、上記枠部材500の内側で行われる遊星歯車400の自転と公転による回動から自転成分のみを取り出して出力する出力軸600とを主要な構成要素としている。
As shown in FIG. 1 and FIG. 2, in the above embodiment of the present invention, the input shaft C connected to the drive source PU and rotating around the axis is in contact with the side surface of the input shaft C. The planetary roller 300 that rotates, the planetary roller 300 that is driven by rotating on the inner surface of the outer ring 430, and the planetary gear 400 that has an inner gear 433 formed on the outer surface of the outer ring 430, and the planetary gear 400 Only the rotation component is extracted from the rotation of the frame member 500 having the external gear 533 formed so that the internal gear 433 is inscribed inside, and the planetary gear 400 performed inside the frame member 500. The output shaft 600 for output is a main component.
上記構成要素のうち、遊星ローラ300は、本実施形態では、遊星ローラユニット350の一部に構成されており、上記遊星ローラユニット350は、全体的には、図3(A)に上面図と図3(B)に側面図とを示したような略円板を基本とした形態を有している。なお、図3(B)においては遊星ローラ300の一部について、図3(A)のA―A方向から見た部分の側断面(ハッチングを表示した部分)も示している。
Among the above components, the planetary roller 300 is configured as a part of the planetary roller unit 350 in this embodiment, and the planetary roller unit 350 is generally shown in a top view in FIG. It has a form based on a substantially circular plate as shown in a side view in FIG. Note that FIG. 3B also shows a side cross section (portion where hatching is displayed) of a part of the planetary roller 300 as viewed from the AA direction in FIG.
そして、上記遊星ローラユニット350は、円板形状のエンジニアリングプラスチック等からなる基材351と、上記基材351の板面上に配置された遊星ローラ300及びカウンターウェイト353とから構成されており、上記基材351の中心部には、上記駆動源PUからの入力軸Cが上記基材351の板面を垂直に挿通する貫通孔355が設けられていて、上記遊星ローラ300とカウンターウェイト353とは、上記貫通孔355に対して、上面から見た場合に、その重心が概ね対照の位置になるように配置されている。なお、ここで、上記円板形状の基材351の直径は、後述する遊星歯車400の外輪430の内側面が形成する円の直径よりも小さく形成されている。
The planetary roller unit 350 includes a base material 351 made of a disk-shaped engineering plastic or the like, and a planetary roller 300 and a counterweight 353 arranged on the plate surface of the base material 351. A through hole 355 through which the input shaft C from the drive source PU passes through the plate surface of the base 351 vertically is provided at the center of the base 351. The planetary roller 300 and the counterweight 353 are The through hole 355 is arranged such that its center of gravity is substantially the position of the contrast when viewed from above. Here, the diameter of the disk-shaped base material 351 is smaller than the diameter of a circle formed by the inner surface of the outer ring 430 of the planetary gear 400 described later.
また、上記遊星ローラ300は、上記基材351の板面上に立設された中心軸310を主軸とした、全体的には円筒形状を有しており、上記中心軸310を中心に回転可能に設けられたジュラルミン等の金属材料からなる環体330と、更に上記環体330の周囲に設けられたウレタンゴム等のエラストマーなどの弾性体からなる接触帯340とから形成されている。そして、上記中心軸310は、上記基材351の板面の中心から離間した位置にあって、上記基材351の中心の貫通孔355に、上記基材351の板面に垂直な方向に入力軸Cを挿通した場合に、上記入力軸Cの軸線の方向と平行で同一の方向を向くように形成されていて、上記接触帯340の外縁である上記遊星ローラ300の回転面が、その側面の一部で上記入力軸Cの外周面と相互に接触して、上記入力軸Cの回転が伝達できるように形成されている。さらに、本発明では、後述するように、上記遊星ローラ300に遊びを持たせることが望ましいため、上記中心軸310の主軸が、基材351からの立設部分を支点として、上記中心軸310の上端方向にかけて、上記主軸から垂直方向に、ある程度の弾性を有していることが望ましい。
The planetary roller 300 has a generally cylindrical shape with a central axis 310 standing on the plate surface of the base material 351 as a main axis, and is rotatable around the central axis 310. Are formed from a ring body 330 made of a metal material such as duralumin, and a contact band 340 made of an elastic body such as an elastomer such as urethane rubber provided around the ring body 330. The central axis 310 is located at a position away from the center of the plate surface of the base material 351, and is input to the through hole 355 at the center of the base material 351 in a direction perpendicular to the plate surface of the base material 351. When the shaft C is inserted, the rotating surface of the planetary roller 300 that is parallel to the direction of the axis of the input shaft C and faces the same direction is the outer edge of the contact band 340. Are partly in contact with the outer peripheral surface of the input shaft C so that the rotation of the input shaft C can be transmitted. Further, in the present invention, as described later, since it is desirable to allow the planetary roller 300 to have play, the main shaft of the central shaft 310 has the erected portion from the base material 351 as a fulcrum. It is desirable to have a certain degree of elasticity in the vertical direction from the main axis toward the upper end.
また、上記カウンターウェイト353は、上記基材351の上記遊星ローラ300と同じ側の板面上に立設され、上記貫通孔355を中心として弦の部分で上記入力軸Cの半側面を取り囲むような半円形状に、後述する遊星歯車400と接触などの干渉が生じないように形成されており、基本的には上記基材351と同様の素材により構成されている。
The counterweight 353 is erected on the same surface of the base 351 as the planetary roller 300, and surrounds the half side surface of the input shaft C at the string portion with the through hole 355 as the center. It is formed in a semicircular shape so as not to cause interference such as contact with the planetary gear 400 described later, and is basically made of the same material as the base material 351.
上記のように構成される遊星ローラユニット350は、貫通孔355に入力軸Cを挿通し、挿通した上記入力軸Cの外側面の一部と上記遊星ローラ300の回転面を構成する接触帯340の一部が相互に接触するように構成している。そのため、上記入力軸Cが軸心を中心に回転した場合に、上記遊星ローラ300が上記接触帯340を介して上記遊星ローラ300の中心軸の中心が上記入力軸Cの周囲を公転しつつ自転することになる。したがって、上記遊星ローラ300の回転面を構成する接触帯340の上記入力軸Cとは反対側の側面を、後述する遊星歯車400の外輪430の内側面側に接触させて上記遊星歯車400に動力を伝達することが可能である。
The planetary roller unit 350 configured as described above passes the input shaft C through the through-hole 355, and a contact band 340 constituting a part of the outer surface of the inserted input shaft C and the rotation surface of the planetary roller 300. Are configured so that a part of them touch each other. Therefore, when the input shaft C rotates around the axis, the planetary roller 300 rotates while the center of the center axis of the planetary roller 300 revolves around the input shaft C via the contact band 340. Will do. Accordingly, the planetary gear 400 is powered by bringing the side surface opposite to the input shaft C of the contact band 340 constituting the rotating surface of the planetary roller 300 into contact with the inner side surface of the outer ring 430 of the planetary gear 400 described later. Can be transmitted.
なお、上記遊星ローラユニット350は、上記実施形態では、円板形状の基材351の板面とその板面上に配設された、遊星ローラ300とカウンターウェイト353とから構成されている。しかし、上記遊星ローラユニット350は、上記のような形態に限らず、上記遊星ローラ300を上記入力軸Cの外側面と接触させて回動させることが可能なものであれば、どのような形態のものでも良く、上記のように円板形状をベースとするものに限らない。
In the above embodiment, the planetary roller unit 350 is composed of the plate surface of the disk-shaped base material 351 and the planetary roller 300 and the counterweight 353 arranged on the plate surface. However, the planetary roller unit 350 is not limited to the above-described configuration, and any configuration is possible as long as the planetary roller 300 can be rotated in contact with the outer surface of the input shaft C. However, the present invention is not limited to those based on the disk shape as described above.
また、上記遊星ローラ300は、基本的には、上記のように中心軸310と環体330と接触帯340とから構成している。しかし、上記遊星ローラ300の形態は、これに限らず、上記入力軸Cからの動力伝達が可能であり、上記中心軸310の軸心が基材351との接触部分を支点としてある程度の弾性を有していれば、特に限定を設けるものではない。そのため、例えば、図3(C)に示すように、上記環体330と接触帯340とを一体として、ゴム等を素材としたエラストマーなどの弾性部品370から形成したり、上記中心軸310と環体330とに代えて、図3(D)に示すような接触帯支持環390を設けたりするなど、上記遊星ローラの摩擦力や力の伝達効率を考慮しつつ、他の構成を採用することも可能である。
Further, the planetary roller 300 basically includes the central shaft 310, the ring body 330, and the contact zone 340 as described above. However, the configuration of the planetary roller 300 is not limited thereto, and power can be transmitted from the input shaft C. The shaft center of the central shaft 310 has a certain degree of elasticity with a contact portion with the base material 351 as a fulcrum. If so, there is no particular limitation. Therefore, for example, as shown in FIG. 3C, the ring body 330 and the contact band 340 are integrally formed from an elastic part 370 such as an elastomer made of rubber or the like, or the center shaft 310 and the ring In place of the body 330, another configuration is adopted in consideration of the frictional force and force transmission efficiency of the planetary roller, such as providing a contact band support ring 390 as shown in FIG. Is also possible.
また、上記カウンターウェイト353は、上記遊星ローラ300を上記入力軸Cの外側面と接触させて回動させた場合の前記入力軸C廻りの質量バランスを調整して振動を抑えることを目的とするものである。そのため、上記の目的が達せられれば、上記のような形態に限られず、例えば、図3(E)に上面図を示したように、上記カウンターウェイト353を、上面視で、上記遊星ローラ300が形成された部分を除いて貫通孔355の周囲を取り巻く円環のように構成して、上記カウンターウェイト353と上記遊星ロータ300との共通の重心が上面視で上記貫通孔355の中心近傍になるように構成しても良い。
In addition, the counterweight 353 is intended to suppress vibration by adjusting the mass balance around the input shaft C when the planetary roller 300 is rotated in contact with the outer surface of the input shaft C. Is. Therefore, if the above purpose is achieved, the configuration is not limited to the above form. For example, as shown in the top view in FIG. Except for the formed portion, it is configured as an annular ring surrounding the periphery of the through hole 355, and the common center of gravity of the counterweight 353 and the planetary rotor 300 is near the center of the through hole 355 in a top view. You may comprise as follows.
ただし、本発明は、もっぱら小型の駆動源を用いた減速機として使用されることを想定しているため、駆動源として小型電気モータなどを用い、上記遊星ローラ300を軽量化できる場合には、必ずしも上記カウンターウェイト353を設けなくて良い場合もある。
However, since the present invention is assumed to be used exclusively as a speed reducer using a small drive source, when the planetary roller 300 can be reduced in weight using a small electric motor or the like as the drive source, In some cases, the counterweight 353 is not necessarily provided.
そのため、例えば、図3(F)に上面図を示したように、上記カウンターウェイト353を設けずに、上記遊星ローラユニット350の基材351を略扇形の形状にするなどして、上記入力軸Cの廻りに上記遊星ローラ300を保持するような構成としても良い。
Therefore, for example, as shown in the top view in FIG. 3 (F), the base shaft 351 of the planetary roller unit 350 has a substantially fan shape without providing the counterweight 353, and the input shaft The planetary roller 300 may be held around C.
なお、上記遊星ローラ300に側面を接触させる入力軸Cは、一般的には金属から構成されている。そこで、上記遊星ローラ300との接触部分の動力伝達効率を向上させるために、上記入力軸Cが上記遊星ローラ300に接触する部分について、コーティングなどの表面処理を行なったり、上記入力軸Cの部分の軸の周りに弾性体からなる薄膜を貼着させたりなどする事で、上記入力軸Cからの上記遊星ローラ300への摩擦力を高める構成とすることも可能である。
In addition, the input shaft C that makes the side surface contact the planetary roller 300 is generally made of metal. Therefore, in order to improve the power transmission efficiency of the contact portion with the planetary roller 300, the portion where the input shaft C is in contact with the planetary roller 300 is subjected to surface treatment such as coating or the portion of the input shaft C. It is also possible to increase the frictional force from the input shaft C to the planetary roller 300 by attaching a thin film made of an elastic body around the shaft.
次に、本発明の上記構成要素のうち遊星歯車400は、図4(A)に上面図と、図4(B)に上記図(A)中のA-A方向から見た側断面図とを示したように、全体としては片側を円形状の平板である伝動板410で封止し、その周囲を取り囲むように外側面に内歯車433を備えた外輪430が立設された、片面を上記平板で封止した円環状に構成されており、その材質には、ジュラルミン等の金属材料が用いられている。なお、上記の円環状の構成部分のうち伝動板410で封止されていない側は、他の構成要素と組み合わされた場合には、入力軸C側(駆動源PU側)に来るように配設される。
Next, among the above-described components of the present invention, the planetary gear 400 includes a top view in FIG. 4 (A) and a side sectional view as seen from the direction AA in FIG. 4 (A). As a whole, one side is sealed with a transmission plate 410, which is a circular flat plate, and an outer ring 430 having an internal gear 433 on the outer side is provided so as to surround the periphery. It is comprised by the annular | circular shape sealed with the said flat plate, and metal materials, such as duralumin, are used for the material. In addition, the side not sealed with the transmission plate 410 among the above-described annular components is arranged so as to come to the input shaft C side (drive source PU side) when combined with other components. Established.
そして、上記伝動板410を構成する円形状の平板の円の外径は、後述する枠部材500に形成された外歯車533の形成する円周の大きさを考慮して形成される。これは上記遊星歯車400の上記伝動板410の直径をあまり大きくして、上記枠部材500に形成された外歯車533の形成する円周の中心に対する偏心を少なくした場合には、上記遊星歯車400の遊星運動が出来なくなるためである。そのため、上記伝動板410を構成する円形状の平板の円の直径は、上記遊星歯車400が上記遊星ローラ300の動きにより、上記枠部材500に形成された外歯車533に噛合しつつ順次遊星運動が可能な範囲に調整して構成されている。
And, the outer diameter of the circular flat plate constituting the transmission plate 410 is formed in consideration of the size of the circumference formed by the external gear 533 formed on the frame member 500 described later. This is because when the diameter of the transmission plate 410 of the planetary gear 400 is made too large so that the eccentricity with respect to the center of the circumference formed by the external gear 533 formed on the frame member 500 is reduced, the planetary gear 400 is used. This is because the planetary motion of can not be. Therefore, the diameter of the circular flat plate that constitutes the transmission plate 410 is such that the planetary gear 400 sequentially moves in planetary motion while meshing with the external gear 533 formed on the frame member 500 by the movement of the planetary roller 300. Is adjusted to the possible range.
また、上記伝動板410の中心部には、上記伝動板410の板面を垂直に貫通する上面から見て円形の中央貫通孔415(必須では無い)が設けられており、更にその周囲を取り巻く円周上に等間隔に、上面から見て円形の複数の内ピン内接部413が同様に伝動板410の板面を垂直に貫通して設けられている。
In addition, a circular central through hole 415 (not essential) is provided at the center of the transmission plate 410 when viewed from the top surface that vertically penetrates the plate surface of the transmission plate 410, and further surrounds the periphery thereof. Similarly, a plurality of circular inner pin inscribed portions 413 that are circular as viewed from above are provided on the circumference of the transmission plate 410 so as to vertically pass through the plate surface at equal intervals.
ここで上記内ピン内接部413は、上記遊星歯車400が、後述する枠体500の外歯車533の枠内で遊星運動(回動)する際に、後述する出力軸600に設けられた内ピン610の一部を接触させながら上記円形の貫通孔である内ピン内接部413の内周面を周回させることを目的とするものである。そのため、上記内ピン内接部413を構成する円の大きさは、上記枠体500内での上記遊星歯車400の回動領域と上記内ピン610の大きさ等を考慮して決定される。
Here, the inner pin inscribed portion 413 is an inner pin provided on an output shaft 600 (to be described later) when the planetary gear 400 performs a planetary motion (rotation) within a frame of an outer gear 533 of the frame 500 (to be described later). The object is to circulate the inner peripheral surface of the inner pin inscribed portion 413, which is the circular through hole, while contacting a part of the pin 610. Therefore, the size of the circle constituting the inner pin inscribed portion 413 is determined in consideration of the rotation area of the planetary gear 400 in the frame 500, the size of the inner pin 610, and the like.
また、上記外輪430の内側面は、上記遊星ローラ300の外周面を接触して回動させて動力の伝達が可能なように、適当な摩擦係数を有する平滑面に形成されている。そして、上記外輪430の内側面が形成する円の直径は、伝動板410の外径を考慮しつつ、上記遊星ローラ300を上記内側面に沿って回動できるように、上記入力軸Cの半径Rcと、上記遊星ローラ300の直径とを合わせた大きさRrよりもわずかに大きく形成される。
Also, the inner surface of the outer ring 430 is formed as a smooth surface having an appropriate friction coefficient so that the outer peripheral surface of the planetary roller 300 can be contacted and rotated to transmit power. The diameter of the circle formed by the inner surface of the outer ring 430 is a radius of the input shaft C so that the planetary roller 300 can be rotated along the inner surface while considering the outer diameter of the transmission plate 410. It is formed to be slightly larger than the size Rr in which Rc and the diameter of the planetary roller 300 are combined.
その一方、上記外輪430の外側面には上記外輪430の円周方向に沿って内歯車433が構成されている。そして、その歯形は、後述する枠体500の外歯車533と噛合可能なものであれば、特に限定を設けるものではない。そのため、インボリュート歯形又はサイクロイド歯形、若しくは、これらの系統に属するが転位係数を調整した歯形乃至その他の何れの歯形またはこれらの組み合わせであっても構わない。
On the other hand, an internal gear 433 is formed on the outer surface of the outer ring 430 along the circumferential direction of the outer ring 430. The tooth profile is not particularly limited as long as it can mesh with an external gear 533 of the frame 500 described later. Therefore, it may be an involute tooth profile or a cycloid tooth profile, or a tooth profile belonging to these systems but having an adjusted dislocation coefficient or any other tooth profile, or a combination thereof.
すなわち、本発明においては、上記のように構成される遊星歯車400は、上述した遊星ローラ300の回転面の側面が上記遊星歯車400を構成する外輪430の内側面に内接し、更に、上記外輪430が上記遊星ローラ300と内接する部分の外側面側で、上記外輪430の外側面に形成された内歯車433と後述する枠体500の外歯車533とが噛み合うように構成されている。そのため、このように遊星ローラ300から遊星歯車400への動力伝達が行われるものであれば、上記遊星歯車400に形成される内歯車433と枠体500の外歯車533の形態には特に限定を設けるものではない。
That is, in the present invention, in the planetary gear 400 configured as described above, the side surface of the rotation surface of the planetary roller 300 described above is inscribed in the inner surface of the outer ring 430 that configures the planetary gear 400, and further, the outer ring An inner gear 433 formed on the outer surface of the outer ring 430 and an outer gear 533 of the frame 500 described later mesh with each other on the outer surface side of the portion inscribed with the planetary roller 300. Therefore, if the power transmission from the planetary roller 300 to the planetary gear 400 is performed in this way, the form of the internal gear 433 formed on the planetary gear 400 and the external gear 533 of the frame 500 is not particularly limited. Not provided.
したがって、例えば、上記内歯車433にインボリュート歯形を用いて、上記遊星歯車400の内側面が遊星ローラ300に押圧されることにより、上記遊星歯車400の内歯車433が上記枠体500の外歯車533の一部とのみ噛合いつつその他では接触せず、上記噛合い箇所が上記遊星ローラ300の回動と共に順次上記外歯車533内を移動していくようにした場合には、広義の内接式遊星歯車機構を構成する事が可能である。そして、このようにインボリュート歯形を用いた場合であっても、例えば、特開2007-24072号公報(特許文献3)に開示されたように適宜転位係数等を調整して、上記内歯車433と外歯車533との歯数差を1として、大きな減速比を得ることも可能である。
Therefore, for example, by using an involute tooth profile for the internal gear 433, the inner surface of the planetary gear 400 is pressed against the planetary roller 300, so that the internal gear 433 of the planetary gear 400 is moved to the outer gear 533 of the frame 500. In the case where the meshing part is moved in the external gear 533 sequentially with the rotation of the planetary roller 300, but in a broad sense, it is inscribed in a broad sense. It is possible to construct a planetary gear mechanism. Even when the involute tooth profile is used as described above, for example, as disclosed in Japanese Patent Application Laid-Open No. 2007-24072 (Patent Document 3), the dislocation coefficient and the like are adjusted as appropriate, and the internal gear 433 It is also possible to obtain a large reduction ratio by setting the difference in the number of teeth from the external gear 533 to 1.
また、例えば、上記内歯車433にサイクロイド歯形を用いて、上記遊星歯車400の内側面が遊星ローラ300に押圧されて、上記遊星歯車400の内歯車433が上記枠体500の外歯車533の一部とのみ噛合いつつもその他の部分でも接触を生じており、上記遊星ローラ300の回動により、上記遊星歯車400が順次上記外歯車533内を遊星運動していくようにした場合には、サイクロイド減速機構を構成する事が可能である。
Further, for example, using a cycloid tooth profile for the internal gear 433, the inner surface of the planetary gear 400 is pressed against the planetary roller 300, so that the internal gear 433 of the planetary gear 400 is one of the external gears 533 of the frame 500. When the planetary gear 400 sequentially rotates in the outer gear 533 by the rotation of the planetary roller 300, the cycloid is brought into contact with the other portion while meshing only with the portion. A deceleration mechanism can be configured.
また、例えば、上記内歯車433にエピトロコイド平行曲線による歯先の凸部分を幾分削った歯形として、エピトロコイド平行曲線の半径rを角度θに応じてr’=r-k(1-cos(nθ))、(但し、kは削る量を調節する係数、nは歯数、θは角度)とした曲線を用いても良い。そして、この場合には、外歯車533の歯型を上記曲線と噛合する同様の曲線から構成すると共に、上記外歯車533の歯数をn+1として、歯先の干渉を抑制しつつ大きな減速比を得ることも可能である。
Further, for example, assuming that the internal gear 433 has a tooth profile obtained by slightly cutting the convex portion of the tooth tip due to the epitrochoid parallel curve, the radius r of the epitrochoid parallel curve is set to r ′ = rk (1-cos) according to the angle θ. (Nθ)), where k is a coefficient for adjusting the amount to be cut, n is the number of teeth, and θ is an angle. In this case, the tooth pattern of the external gear 533 is composed of a similar curve that meshes with the above curve, and the number of teeth of the external gear 533 is n + 1 so that a large speed reduction is achieved while suppressing the interference of the tooth tips. It is also possible to obtain a ratio.
但し、本発明が用いられるような小型の減速機では、上記枠体500や遊星歯車400も比較的小型に形成され、これらの材料とされるプラスチック等のエラストマーのすべり性も良い場合が多いため、上記歯形は、使用される機器や材質の特性を考慮して決定される。
However, in a small speed reducer in which the present invention is used, the frame body 500 and the planetary gear 400 are also formed in a relatively small size, and the slipperiness of an elastomer such as plastic made of these materials is often good. The tooth profile is determined in consideration of the characteristics of equipment and materials used.
次に、本発明の上記構成要素のうち枠部材500は、図5(A)に上面図と、図5(B)に側面図とを示したように、全体としては中央部に大きな貫通孔530とそれに隣接する小さな貫通孔550のある平板状に形成されており、その材質は、上記遊星ローラユニット350を構成する基材351と同様にエンジニアリングプラスチック等で形成されている。
Next, among the above-described components of the present invention, the frame member 500 has a large through hole at the center as a whole as shown in a top view in FIG. 5 (A) and a side view in FIG. 5 (B). 530 and the small through-hole 550 adjacent to it are formed in the shape of a flat plate, and the material thereof is formed of engineering plastic or the like, similar to the base material 351 constituting the planetary roller unit 350.
そして、上記中央部の大きな貫通孔530の内周面には外歯車533が形成されており、上記外歯車533の構成する略円周内を上記遊星歯車400が回動しながら移動する構成となっている。なお、上記大きな貫通孔530に隣接して設けられた2つの小さな貫通孔550は、上記枠部材500を駆動源PUに固定するための(図示しない)ネジを嵌挿するためのものである。そのため、本実施形態では、上記図1に示したように、後述する固定板700と上記駆動源PUとの間に本実施形態の各構成要素を収容し、上記固定板700に上記貫通孔550と同様に設けられた貫通孔750の上面から上記ネジを上記駆動源PU方向に嵌挿して、上記駆動源PUにネジ止めすることにより、本発明の各構成要素を機能的に収容することが可能である。
An outer gear 533 is formed on the inner peripheral surface of the large through-hole 530 in the central portion, and the planetary gear 400 moves while rotating in a substantially circumference formed by the outer gear 533. It has become. The two small through holes 550 provided adjacent to the large through hole 530 are for inserting screws (not shown) for fixing the frame member 500 to the drive source PU. Therefore, in the present embodiment, as illustrated in FIG. 1, each component of the present embodiment is accommodated between a later-described fixing plate 700 and the driving source PU, and the through-hole 550 is accommodated in the fixing plate 700. The components of the present invention can be functionally accommodated by inserting the screws in the direction of the drive source PU from the upper surface of the through-hole 750 provided in the same manner as above and screwing the screws to the drive source PU. Is possible.
また、上記大きな貫通孔530の内周面に形成された外歯車533は、上記遊星歯車400の外輪430に形成された内歯車433と噛合するように形成されている。そして、上記外歯車533の歯形は、上記内歯車433について上述したと同様の理由により、特に限定を設けるものではないため、インボリュート歯形又はサイクロイド歯形若しくはその他の歯形であっても構わない。また、上記外歯車533の歯数は、上記遊星歯車400の外輪430に形成された内歯車433と少なくとも1以上多く形成されており、後述するように、上記遊星ローラ300と入力軸Cとの口径比などを合わせて考慮することにより、その差異に応じた減速比を得ることが可能である。
Further, the external gear 533 formed on the inner peripheral surface of the large through hole 530 is formed so as to mesh with the internal gear 433 formed on the outer ring 430 of the planetary gear 400. The tooth profile of the external gear 533 is not particularly limited for the same reason as described above with respect to the internal gear 433, and therefore may be an involute tooth profile, a cycloid tooth profile, or another tooth profile. The number of teeth of the external gear 533 is at least one more than that of the internal gear 433 formed on the outer ring 430 of the planetary gear 400. As will be described later, the number of teeth of the planetary roller 300 and the input shaft C is increased. By considering the aperture ratio and the like together, it is possible to obtain a reduction ratio according to the difference.
なお、上記外歯車533については、上記のように貫通孔530の内周面を上記インボリュート歯形又はサイクロイド歯形若しくはその他の歯形として形成する形態に限らず、図5(C)に該当部分の上面図を示したように、上記外歯車533の内面の上記遊星歯車400との接触部分に関して、上記入力軸Cの軸心と平行で同一の方向を向いた回転軸を有する複数のローラ(ピン)533Rにより構成しても良い。そして、特にこのような形態とした場合には、本発明をサイクロイド減速機構に利用する場合に、上記遊星歯車400に形成された内歯車433と枠部材500に形成された外歯車533とが噛合する際の抵抗や歯先の干渉による抵抗を減少させることが可能である。
Note that the outer gear 533 is not limited to the form in which the inner peripheral surface of the through hole 530 is formed as the involute tooth shape, the cycloid tooth shape, or other tooth shapes as described above, and a top view of a portion corresponding to FIG. As shown, a plurality of rollers (pins) 533R having a rotation axis parallel to the axis of the input shaft C and facing the same direction with respect to the contact portion of the inner surface of the external gear 533 with the planetary gear 400. You may comprise by. And especially when it is set as such a form, when using this invention for a cycloid reduction mechanism, the internal gear 433 formed in the said planetary gear 400 and the external gear 533 formed in the frame member 500 mesh. It is possible to reduce the resistance caused by the interference and tooth tip interference.
本発明では、上記枠部材500を上記のように構成することにより、上記外歯車533によって略円周状に構成される上記外歯車533の内側に沿って、上記遊星歯車400を噛合させながら順次自転させつつ公転させることが可能であり、これにより、後述する出力軸600からの出力の取り出しを容易化している。
In the present invention, by configuring the frame member 500 as described above, the planetary gear 400 is sequentially meshed with the outer gear 533 along the inner side of the outer gear 533 that is formed in a substantially circumferential shape. It is possible to revolve while rotating, thereby facilitating extraction of output from the output shaft 600 described later.
次に、本発明の上記構成要素のうち出力軸600は、図6(A)に上面図、図6(B)に側面図、図6(C)に底面図及び、図6(D)にその斜視図を示したように、円板形状の伝達板610と、上記伝達板610から立設した円筒形状からなる複数の内ピン630と、上記伝達板610の上記内ピン630が立設された側とは反対側の板面中央から立設した伝達軸とから形成されており、その材質は、上記遊星ローラユニット350を構成する基材351や枠部材500と同様にエンジニアリングプラスチック等で形成されている。
Next, among the above components of the present invention, the output shaft 600 includes a top view in FIG. 6A, a side view in FIG. 6B, a bottom view in FIG. 6C, and a bottom view in FIG. As shown in the perspective view, a disc-shaped transmission plate 610, a plurality of cylindrical inner pins 630 erected from the transmission plate 610, and the inner pins 630 of the transmission plate 610 are erected. The transmission shaft is erected from the center of the opposite side of the plate surface, and the material thereof is formed of engineering plastic or the like, similar to the base material 351 and the frame member 500 constituting the planetary roller unit 350. Has been.
そして、上記複数の内ピン630は、上記遊星歯車400に設けられた複数の内ピン内接部413と同一の個数が設けられており、上記内ピン630は上記伝達板610の中心を中心とする円周上に等間隔に設けられている。また、上記内ピン630は基本的には円筒形状を有しており、これを構成する上記円筒形状の円筒部分の長さは、上記出力軸600を上記図1に示したように、上記遊星歯車400上から組み合わせた場合に、上記遊星歯車400上に形成された内ピン内接部413に内接できるような長さに形成し、その直径は上記遊星歯車400に設けられた内ピン内接部413の内周に沿って周回できる程度に形成される。
The plurality of inner pins 630 are provided in the same number as the plurality of inner pin inscribed portions 413 provided on the planetary gear 400, and the inner pins 630 are centered on the center of the transmission plate 610. Are provided at equal intervals on the circumference. Further, the inner pin 630 basically has a cylindrical shape, and the length of the cylindrical portion of the cylindrical shape constituting the inner pin 630 is such that the output shaft 600 is connected to the planet as shown in FIG. When combined from above the gear 400, it is formed in such a length that it can be inscribed in the inner pin inscribed portion 413 formed on the planetary gear 400, and its diameter is in the inner pin provided in the planetary gear 400. It is formed to such an extent that it can circulate along the inner periphery of the contact portion 413.
また、上記出力軸600の伝達軸650は、上記伝達板610を形成する円板の形状の中心から上記内ピン630の設けられた側とは反対側の板面上に立設されており、上記伝達軸650の軸心は、上記図1に示したように、本発明の各構成要素を組み合わせた場合には、上記入力軸Cの軸心と同心の延長線上に配置される。
Further, the transmission shaft 650 of the output shaft 600 is erected on the plate surface opposite to the side where the inner pin 630 is provided from the center of the shape of the disk forming the transmission plate 610, The shaft center of the transmission shaft 650 is arranged on an extension line concentric with the shaft center of the input shaft C when the components of the present invention are combined as shown in FIG.
そのため、本発明では上記出力軸600を上記のように構成する事により、上記遊星歯車400の行う自転と公転運動から、上記遊星歯車400に設けられた内ピン内接部413の内周に沿って周回する上記内ピン630によって、自転成分のみを取り出すことが可能であり、その結果として、上記伝達軸650により、入力軸Cと同軸上において、調整された回転数とトルクの出力を取り出すことが可能である。なお、本発明では、上記出力軸600は、上記遊星歯車400の遊星運動のうちから自転運動のみを取り出す目的のものであるため、同様の機能を有する物であれば、上記に限らない形態によることも可能である。
Therefore, in the present invention, the output shaft 600 is configured as described above, so that the rotation and revolution motions of the planetary gear 400 are performed along the inner periphery of the inner pin inscribed portion 413 provided on the planetary gear 400. It is possible to take out only the rotation component by the inner pin 630 rotating around, and as a result, take out the output of the adjusted rotation speed and torque on the same axis as the input shaft C by the transmission shaft 650. Is possible. In the present invention, the output shaft 600 is for the purpose of extracting only the rotation motion from the planetary motion of the planetary gear 400, so that the output shaft 600 is not limited to the above as long as it has the same function. It is also possible.
なお、本発明の上記実施形態では、上記図1に記載したように、固定板700とスペーサ790とを備えている。
In the above embodiment of the present invention, the fixing plate 700 and the spacer 790 are provided as described in FIG.
このうち上記固定板700は上述したように、本発明の各構成要素を機能的に収容するものであり、中央に貫通孔730と上記貫通孔730の外周側に別の貫通孔750を設けた全体として平板形状の形態を有している。そして、その材質は、上記枠部材500などと同様にエンジニアリングプラスチック等から構成されている。また、上記貫通孔750は、上述したように、他の構成要素を上記枠部材500との間に収容するためのネジを挿通するものであるが、その一方、上記貫通孔730は、上記出力軸600の伝達軸650を挿通できるように構成されているが、上記出力軸600の伝達板610は挿通できないように構成されている。
Among them, as described above, the fixing plate 700 functionally accommodates each component of the present invention, and a through hole 730 is provided at the center and another through hole 750 is provided on the outer peripheral side of the through hole 730. It has a flat plate shape as a whole. And the material is comprised from engineering plastics etc. similarly to the said frame member 500 grade | etc.,. Further, as described above, the through-hole 750 is for inserting a screw for accommodating other components between the frame member 500 and the through-hole 730, while the through-hole 730 is used for the output. The transmission shaft 650 of the shaft 600 is configured to be inserted, but the transmission plate 610 of the output shaft 600 is configured not to be inserted.
また、上記スペーサ790は図1及び図2に示したように、上記遊星ローラ300を有する遊星ローラユニット350の上面側と上記遊星歯車400との間に配設され、上記2つの構成要素の円滑な運動を補助するための、中央に貫通孔を設けた円形の平板形状に形成されたものである。但し、上記実施例では、上記スペーサ790は上述のように上記遊星ローラユニット350の上面側と上記遊星歯車400との間に配設されているが、これに限らず、上記遊星ローラユニット350の下側と駆動源PUとの間に加えて配設しても良い。但し、上記スペーサ790は必ずしも本発明の必須の構成要素ではないため、上記駆動源PUの出力の程度や大きさ或いは、素材とするエンジニアリングプラスチックなどのすべり性(潤滑性)を考慮して省略することも可能である。
Further, as shown in FIGS. 1 and 2, the spacer 790 is disposed between the upper surface side of the planetary roller unit 350 having the planetary roller 300 and the planetary gear 400 so that the two components can be smoothly moved. It is formed in a circular flat plate shape having a through hole in the center for assisting proper movement. However, in the above embodiment, the spacer 790 is disposed between the upper surface side of the planetary roller unit 350 and the planetary gear 400 as described above. You may arrange | position in addition between a lower side and drive source PU. However, since the spacer 790 is not necessarily an essential component of the present invention, the spacer 790 is omitted in consideration of the degree and size of the output of the drive source PU or the slipperiness (lubricity) of the engineering plastic used as a material. It is also possible.
また、本実施形態では、駆動源PUとして比較的小型の電気モータを使用しているが、上記駆動源PUはこれに限られず、本減速装置を使用するアクチュエータなどの機械装置の種類に応じて任意に選択が可能である。
In this embodiment, a relatively small electric motor is used as the drive source PU. However, the drive source PU is not limited to this, and depending on the type of mechanical device such as an actuator that uses the speed reducer. Any selection is possible.
次に、本発明の上記実施形態による作用について説明する。
Next, the operation of the above embodiment of the present invention will be described.
本発明は、従来の遊星ローラ機構に必要であった予圧機構を省略できるため、小型化を実現することが可能となった、遊星ローラ駆動型遊星歯車減速装置を提供している。
The present invention provides a planetary roller drive type planetary gear speed reduction device that can realize a reduction in size because the preloading mechanism required for the conventional planetary roller mechanism can be omitted.
すなわち、遊星ローラ機構には、出力トルクに応じた予圧が必要であるところ、本減速装置に用いている機構では出力トルクに応じた予圧が遊星ローラに働くため、入出力トルクが小さい場合には、予圧が小さくなり、大きい場合には、予圧も大きくなる。このため、入出力トルクが小さい場合には予圧による遊星ローラの変形により生じる損失が小さく、入出力トルクが大きい場合には予圧も大きくなり大トルクの伝達が可能になっている。そして、出力トルクあたりの予圧の大きさは、遊星歯車の設計により調節することが可能である。
In other words, the planetary roller mechanism requires a preload corresponding to the output torque. However, in the mechanism used in the speed reducer, the preload corresponding to the output torque acts on the planetary roller. When the preload decreases and increases, the preload increases. For this reason, when the input / output torque is small, the loss caused by the deformation of the planetary roller due to the preload is small, and when the input / output torque is large, the preload is large and a large torque can be transmitted. The magnitude of the preload per output torque can be adjusted by the design of the planetary gear.
これを更に具体的にみると、本発明は、上述の図1、図2等で示したように、入力軸Cの外周面と接して回動する遊星ローラ300と、上記遊星ローラ300の外周面の一部が内接して回動する外輪430を有する遊星歯車400と、上記遊星歯車400の外輪430の外側面に形成された内歯車433と噛合して上記遊星歯車400が内周に沿って遊星運動をすることが可能な外歯車533を有する枠部材500と、上記遊星歯車400の遊星運動から自転成分のみを取り出して出力が可能な出力軸600とから構成されている。
More specifically, in the present invention, as shown in FIGS. 1 and 2 and the like, the planetary roller 300 that rotates in contact with the outer peripheral surface of the input shaft C and the outer periphery of the planetary roller 300 are described. A planetary gear 400 having an outer ring 430 rotating with a part of the surface inscribed therein, and an inner gear 433 formed on the outer surface of the outer ring 430 of the planetary gear 400 mesh with the planetary gear 400 along the inner circumference. Frame member 500 having an external gear 533 capable of performing planetary motion, and an output shaft 600 that can output only the rotational component extracted from the planetary motion of the planetary gear 400.
そのため、本発明では、駆動源PUから入力軸Cの回転として伝達された動力は、上記遊星ローラ300から、上記遊星歯車400の外輪430の内側面を介して、上記枠部材500の内側に設けられた外歯車533の枠内における上記遊星歯車400の遊星運動に変換され、上記遊星歯車400に設けられた内ピン内接部413の内周に上記出力軸600に設けられた内ピン630が内接して上記出力軸600の伝達軸650軸心を中心に回転することにより上記遊星歯車400の遊星運動から自転成分のみを取り出して、上記出力軸600の伝達軸650を回転させることを通じて、上記出力軸600から減速した回転動力として取り出すことが可能である。
Therefore, in the present invention, the power transmitted as the rotation of the input shaft C from the drive source PU is provided inside the frame member 500 from the planetary roller 300 via the inner surface of the outer ring 430 of the planetary gear 400. The inner pin 630 provided on the output shaft 600 is converted into the planetary movement of the planetary gear 400 within the frame of the outer gear 533 and provided on the inner periphery of the inner pin inscribed portion 413 provided on the planetary gear 400. By rotating only the rotation component from the planetary motion of the planetary gear 400 by inscribed and rotating around the transmission shaft 650 center of the output shaft 600, and rotating the transmission shaft 650 of the output shaft 600, the above-mentioned It can be taken out from the output shaft 600 as decelerated rotational power.
そして、上記のような本発明の構成において、上記遊星ローラ300と遊星歯車400と枠部材500との接触状態は図7で示したように、遊星ローラ300の回転面の側面が遊星歯車400を構成する外輪430の内側面に押圧されるように接触し、更に、上記外輪430が上記遊星ローラ300押圧して接触している部分の外側面側で、上記外輪430の外側面に形成された内歯車433と枠体500の内側に形成された外歯車533とが噛合するようになっている。なお、ここで図7(A)は、上記図2に示した側断面図の内、A-A線の部分を上面側から見た場合の断面図であり、図7(B)は、同じく上記図2に示した側断面図の内、B-B線の部分を上面側から見た場合の断面図である。なお、同図7(B)では、本発明の理解を容易にするために、上記遊星歯車400と入力軸Cの部分のみにハッチングを表示し、他の部分については表示を省略している。
In the configuration of the present invention as described above, the planetary roller 300, the planetary gear 400, and the frame member 500 are in contact with each other as shown in FIG. The outer ring 430 is formed on the outer surface of the outer ring 430 on the outer surface side of the portion where the outer ring 430 is pressed and in contact with the planetary roller 300. The internal gear 433 and the external gear 533 formed inside the frame body 500 are meshed with each other. Here, FIG. 7A is a cross-sectional view of the portion taken along the line AA in the side cross-sectional view shown in FIG. 2, and FIG. FIG. 3 is a cross-sectional view of a portion taken along line BB in the side cross-sectional view shown in FIG. In FIG. 7B, in order to facilitate understanding of the present invention, only the planetary gear 400 and the input shaft C are hatched, and the other parts are not shown.
上記図7(A)に示したように、本発明の遊星ローラ駆動型内接式遊星歯車減速装置では、遊星歯車400に発生する半径方向力(図中矢印A)を予圧として利用するため、遊星歯車400の外輪430の内側面を遊星ローラ機構の外ローラとしている。そして、このように構成する事により、図7(B)に示すように遊星ローラ300が遊星歯車400を枠部材500の内側に形成した外歯車533に押し付けるため、遊星歯車400には出力トルクに応じて半径方向力(図7(A)図中の矢印A)が生じ、この力が遊星ローラ300に、上記図7Bの矢印Bのように加わることになる。そして、遊星ローラ300の中心軸310に遊びを持たせることで、この力(図中矢印B)は太陽ローラとして機能する入力軸Cにも加わり、本発明を構成する遊星ローラ機構に必要な予圧として働くようになっている。
As shown in FIG. 7A, in the planetary roller drive type inscribed planetary gear speed reduction device of the present invention, the radial force (arrow A in the figure) generated in the planetary gear 400 is used as a preload. The inner surface of the outer ring 430 of the planetary gear 400 is used as the outer roller of the planetary roller mechanism. With this configuration, the planetary roller 300 presses the planetary gear 400 against the external gear 533 formed inside the frame member 500 as shown in FIG. Accordingly, a radial force (arrow A in FIG. 7A) is generated, and this force is applied to the planetary roller 300 as indicated by arrow B in FIG. 7B. Then, by providing play to the center shaft 310 of the planetary roller 300, this force (arrow B in the figure) is also applied to the input shaft C functioning as a sun roller, and the preload required for the planetary roller mechanism constituting the present invention. To work as.
また、本発明による減速比のうち、遊星ローラによる減速比は、上記図7(B)で示したように、入力軸Cの半径をRc、前記入力軸Cの軸心から遊星ローラ300の回転面の側面が上記遊星歯車400の外輪430の内側面側に接触する部分(ここで上記接触部分は滑らない)までの距離をRp(=上述のRr)とすると、一般的な遊星歯車の式に基づいて、[(Rp/Rc)+1]となる。
Of the reduction ratios according to the present invention, the reduction ratio by the planetary roller is such that the radius of the input shaft C is Rc and the rotation of the planetary roller 300 from the axis of the input shaft C is as shown in FIG. When the distance to the portion where the side surface of the planetary gear 400 contacts the inner surface of the outer ring 430 of the planetary gear 400 (where the contact portion does not slip) is Rp (= Rr described above), a general planetary gear equation [(Rp / Rc) +1] based on the above.
また、遊星歯車400と枠部材500による減速比は、図7(A)に示すように、遊星歯車400の外輪430に形成された内歯車433の歯数をZcとし、枠部材500の外歯車533の歯数をZdとすると、次のようになる。
The reduction ratio between the planetary gear 400 and the frame member 500 is such that the number of teeth of the internal gear 433 formed on the outer ring 430 of the planetary gear 400 is Zc, as shown in FIG. Assuming that the number of teeth of 533 is Zd, it is as follows.
すなわち、遊星歯車400の上記内歯車433が上記枠部材500の外歯車533と噛合った状態で上記外歯車533内を一周公転させると上記外歯車533の歯数Zdだけ歯が噛んで元の状態に戻ることから、元の位置では、Zd-Zcだけずれた歯が噛みあうことになるため、1回の公転に対し自転は[(Zd-Zc)/Zc]となる。そのため、遊星歯車400と枠部材500による減速比は、[1:[(Zd-Zc)/Zc]]から、[Zc/(Zd-Zc)]となる。
That is, when the internal gear 433 of the planetary gear 400 meshes with the external gear 533 of the frame member 500 and revolves around the external gear 533 once, the number of teeth Zd of the external gear 533 is engaged, and the original gears are engaged. Since returning to the state, at the original position, teeth shifted by Zd-Zc are engaged with each other, so the rotation is [(Zd-Zc) / Zc] for one revolution. Therefore, the reduction ratio between the planetary gear 400 and the frame member 500 is changed from [1: [(Zd−Zc) / Zc]] to [Zc / (Zd−Zc)].
以上の事から、本発明による減速比nとしては、(上記遊星ローラによる減速比)×(遊星歯車400と枠部材500による減速比)により、n=[(Rp/Rc)+1]×[Zc/(Zd-Zc)]が得られる。
From the above, the reduction ratio n according to the present invention is n = [(Rp / Rc) +1] × [Zc by (reduction ratio by the planetary roller) × (reduction ratio by the planetary gear 400 and the frame member 500). / (Zd-Zc)] is obtained.
なお、本発明の実施例では、小型の電動モータを使用して、例えば、上記各数値が、Rc=0.75mm、Rp=3.95mm、Zc=19、Zd=20の各数値のものを使用して、減速比nがおよそ119のものを得ている。
In the embodiment of the present invention, a small electric motor is used. For example, the above numerical values are Rc = 0.75 mm, Rp = 3.95 mm, Zc = 19, and Zd = 20. In use, a reduction ratio n of approximately 119 is obtained.
以上のように、本発明によれば、従来よりも、低振動かつ低騒音で小型軽量かつ低コストの内接式遊星歯車減速装置を提供することが可能である。
As described above, according to the present invention, it is possible to provide an inscribed planetary gear reduction device that is smaller, lighter, and lower in cost, lower in vibration and lower in noise than in the past.
なお、本発明の上記実施形態は本発明の構成例の一例を示したものであり、本発明は上記の例に限定されるものではなく、本発明の基本的構成要素と均等の範囲で当業者が実施可能な変形例も当然に本発明に含まれる。
The above embodiment of the present invention shows an example of the configuration example of the present invention, and the present invention is not limited to the above example, and is within the scope equivalent to the basic components of the present invention. Naturally, modifications that can be implemented by a trader are also included in the present invention.
そのため、例えば、上述の図7で示したような、遊星歯車400に形成された内歯車433と枠体500に形成された外歯車533とが一部で噛合しながらも他の部分では接触せずに上記遊星歯車400が上記枠体500内で順次遊星運動を行うようなものとは異なり、図8(A)、(B)で示したような、遊星歯車800にエピトロコイド曲線等で形成された内歯車833と枠体500に形成された外歯車533とが一部で噛合しかつ他の部分でも接触しながら上記遊星歯車800が上記枠体500内で遊星運動を行う、サイクロイド型の減速装置を構成するものであっても良い。
Therefore, for example, as shown in FIG. 7 described above, the internal gear 433 formed on the planetary gear 400 and the external gear 533 formed on the frame 500 are partially engaged with each other, but are not in contact with each other. Unlike the case where the planetary gear 400 sequentially performs planetary motion in the frame 500, the planetary gear 800 is formed with an epitrochoid curve or the like as shown in FIGS. 8 (A) and 8 (B). A cycloid type of which the planetary gear 800 performs planetary motion in the frame 500 while the internal gear 833 and the external gear 533 formed in the frame 500 are partially engaged with each other and in contact with other portions. It may constitute a reduction gear.
また、例えば、図9~図13に示したような、変形例を用いることも可能である。なお、ここで上記図9は、上記のように、本発明を構成する遊星歯車、出力軸及び枠部材の異なる構成例の概略を示す斜視図であり、図10はこれらを組み合わせた状態を示す側断面図である。また、上記図9では理解を容易にするために、一部の構成要素を外した状態を示している。
Also, for example, modifications as shown in FIGS. 9 to 13 can be used. Here, FIG. 9 is a perspective view schematically showing different configuration examples of the planetary gear, the output shaft, and the frame member constituting the present invention as described above, and FIG. 10 shows a state in which these are combined. It is a sectional side view. Further, FIG. 9 shows a state in which some components are removed for easy understanding.
上記図9に示した例は、図11(A)に斜視図、同(B)に上面図、同(C)に側面図、同(D)に同図(B)のA-A線における断面図を示した遊星歯車940と、図12(A)に斜視図、同(B)に上面図、同(C)に側面図したような枠部材950と、図13(A)に斜視図、同(B)に上面図、同(C)に側面図、同(D)に同図(B)のA-A線における断面図を示したように出力軸960とが用いられたものである。
The example shown in FIG. 9 is a perspective view in FIG. 11 (A), a top view in FIG. 11 (B), a side view in FIG. 11 (C), and a line AA in FIG. A planetary gear 940 showing a sectional view, a perspective view in FIG. 12A, a top view in FIG. 12B, a frame member 950 as shown in a side view in FIG. 12C, and a perspective view in FIG. (B) is a top view, (C) is a side view, and (D) is a cross-sectional view taken along the line AA of FIG. is there.
そして、上記図9に示した例では、本発明の構成要素である図11に示す遊星歯車940の外側面に、上段943Uと下段943Dからなる上下2段の異なる歯数の歯車を有する外輪943を構成し、これに合わせて、図12に示す枠部材950の外歯車953と図13における出力軸960とを形成したものである。なお、ここで示した異なる構成例900においても、上記本発明の遊星ローラ300の基本形態と上記遊星歯車940の内側面とは、上述した実施形態と同様の構成を有している。
In the example shown in FIG. 9, an outer ring 943 having gears with different numbers of teeth in two upper and lower stages composed of an upper stage 943U and a lower stage 943D on the outer surface of the planetary gear 940 shown in FIG. 11, which is a component of the present invention. In accordance with this, the external gear 953 of the frame member 950 shown in FIG. 12 and the output shaft 960 in FIG. 13 are formed. Also in the different configuration example 900 shown here, the basic configuration of the planetary roller 300 of the present invention and the inner side surface of the planetary gear 940 have the same configuration as the above-described embodiment.
上記図9に示した構成例900では、上記遊星ローラ300が遊星歯車940の内側面で回動すると、それに応じて、上記遊星歯車940の外輪943のうち下段943Dの部分が、上記枠部材950内に形成された外歯車953の内側と噛合って上記外歯車953が形成する円周内を回動する。そうすると、上記遊星歯車940の外輪943のうち上段943Uの部分も回動することになるが、上記上段943Uの側面は、上記出力軸960を構成する伝達板961の内側に別途形成された出力軸歯車963と噛合い、それによって、上記出力軸960が上記遊星歯車940の運動のうち自転成分を取り出して、伝達軸965から出力を得ることが可能である。
In the configuration example 900 shown in FIG. 9, when the planetary roller 300 rotates on the inner surface of the planetary gear 940, the lower stage 943 </ b> D of the outer ring 943 of the planetary gear 940 corresponds to the frame member 950. It meshes with the inside of the external gear 953 formed inside and rotates within the circumference formed by the external gear 953. Then, the portion of the upper stage 943U of the outer ring 943 of the planetary gear 940 also rotates. The side surface of the upper stage 943U is an output shaft separately formed inside the transmission plate 961 constituting the output shaft 960. The gear 963 is engaged with the gear 963, whereby the output shaft 960 can extract the rotation component of the movement of the planetary gear 940 and obtain an output from the transmission shaft 965.
そのため、本発明では、例えば、上記のような構成によっても、低振動かつ低騒音で小型軽量かつ低コストの内接式遊星歯車減速装置を提供することが可能である。
Therefore, in the present invention, for example, even with the above-described configuration, it is possible to provide a low-vibration, low-noise, small, lightweight, and low-cost internal planetary gear reduction device.
300 遊星ローラ
310 中心軸
330 環体
340 接触帯
350 遊星ローラユニット
351 基材
355 貫通孔
353 カウンターウェイト
370 弾性部品
390 接触帯支持環
400 800 940 遊星歯車
410 伝動板
413 内ピン内接部
415 中央貫通孔
430 943 外輪
433 833 内歯車
500 950枠部材
530 550 貫通孔
533 953 外歯車
600 960 出力軸
610 伝達板
630 内ピン
650 965 伝達軸
700 固定板
730 750 貫通孔
790 スペーサ
900 異なる構成例
943U 上段歯車
943D 下段歯車
S 内噛歯車
P 遊星歯車
C 駆動軸(入力軸)
O 出力軸
E 偏心体
S’ 枠部材
Sp 外ピン
P 曲線板
PH 偏心体内接部
Ph 内ピン内接部
Os 伝達軸
Op 内ピン
PU 駆動源
Rc 入力軸Cの半径
Rp 入力軸Cの軸心から遊星ローラと枠部材との接触面までの半径
Zc 遊星歯車の内歯車数
Zd 枠部材の外歯車数 300Planetary roller 310 Central shaft 330 Ring body 340 Contact zone 350 Planetary roller unit 351 Base material 355 Through hole 353 Counterweight 370 Elastic band 390 Contact zone support ring 400 800 940 Planetary gear 410 Transmission plate 413 Inner pin inscribed portion 415 Center through Hole 430 943 Outer ring 433 833 Internal gear 500 950 Frame member 530 550 Through hole 533 953 External gear 600 960 Output shaft 610 Transmission plate 630 Inner pin 650 965 Transmission shaft 700 Fixing plate 730 750 Through hole 790 Spacer 900 Different configuration example 943U Upper gear 943D Lower gear
S internal gear P planetary gear C drive shaft (input shaft)
O Output shaft E Eccentric body S 'Frame member Sp Outer pin P Curved plate PH Eccentric body inscribed portion Ph Inner pin inscribed portion Os Transmission shaft Op Inner pin PU Drive source Rc Radius of input shaft C Rp From axis of input shaft C Radius Zc to contact surface between planetary roller and frame member Number of planetary gears Zd Number of external gears of frame member
310 中心軸
330 環体
340 接触帯
350 遊星ローラユニット
351 基材
355 貫通孔
353 カウンターウェイト
370 弾性部品
390 接触帯支持環
400 800 940 遊星歯車
410 伝動板
413 内ピン内接部
415 中央貫通孔
430 943 外輪
433 833 内歯車
500 950枠部材
530 550 貫通孔
533 953 外歯車
600 960 出力軸
610 伝達板
630 内ピン
650 965 伝達軸
700 固定板
730 750 貫通孔
790 スペーサ
900 異なる構成例
943U 上段歯車
943D 下段歯車
S 内噛歯車
P 遊星歯車
C 駆動軸(入力軸)
O 出力軸
E 偏心体
S’ 枠部材
Sp 外ピン
P 曲線板
PH 偏心体内接部
Ph 内ピン内接部
Os 伝達軸
Op 内ピン
PU 駆動源
Rc 入力軸Cの半径
Rp 入力軸Cの軸心から遊星ローラと枠部材との接触面までの半径
Zc 遊星歯車の内歯車数
Zd 枠部材の外歯車数 300
S internal gear P planetary gear C drive shaft (input shaft)
O Output shaft E Eccentric body S 'Frame member Sp Outer pin P Curved plate PH Eccentric body inscribed portion Ph Inner pin inscribed portion Os Transmission shaft Op Inner pin PU Drive source Rc Radius of input shaft C Rp From axis of input shaft C Radius Zc to contact surface between planetary roller and frame member Number of planetary gears Zd Number of external gears of frame member
Claims (4)
- 駆動源に接続され、軸心を中心に回転する入力軸と、
前記入力軸の外周面と回転面の一部が相互に接するように設けた、前記入力軸の軸心と平行で同一の方向を向いた回転軸を有する遊星ローラと、
前記入力軸に対して垂直に形成された円板状の伝動板と前記伝動板の外縁から前記駆動源側に前記入力軸に対して平行に形成された外輪とからなり、前記伝動板には、前記伝動板の中心を取り囲むように等間隔に形成された複数の貫通孔を有し、前記外輪の内側面に前記遊星ローラの回転面の一部が内接し、前記外輪の外側面に内歯車が形成された遊星歯車と、
前記遊星歯車の前記外輪の外側面に形成された内歯車と噛合する外歯車を有する枠部材と、
前記遊星歯車の前記伝動板に形成された複数の貫通孔のそれぞれに一部で内接する複数のピンが立設された伝達板と前記伝達板の前記ピンが立設された側とは反対側に立設された伝達軸とからなる出力軸と、
により構成されることを特徴とする遊星ローラ駆動型内接式遊星歯車減速装置。 An input shaft connected to a drive source and rotating about an axis;
A planetary roller having a rotation axis parallel to the axis of the input shaft and oriented in the same direction, provided so that an outer peripheral surface of the input shaft and a part of the rotation surface are in contact with each other;
It consists of a disc-shaped transmission plate formed perpendicular to the input shaft and an outer ring formed in parallel to the input shaft from the outer edge of the transmission plate to the drive source side. A plurality of through holes formed at equal intervals so as to surround the center of the transmission plate, a part of the rotating surface of the planetary roller is inscribed inside the outer surface of the outer ring, and an inner surface is formed on the outer surface of the outer ring. A planetary gear formed with gears;
A frame member having an external gear meshing with an internal gear formed on the outer surface of the outer ring of the planetary gear;
A transmission plate in which a plurality of pins that are partially inscribed in each of a plurality of through holes formed in the transmission plate of the planetary gear and a side opposite to the side on which the pins of the transmission plate are erected An output shaft comprising a transmission shaft erected on the
A planetary roller drive type inscribed planetary gear reduction device comprising: - 前記遊星ローラの回転面は弾性体により構成される請求項1に記載の遊星ローラ駆動型内接式遊星歯車減速装置。 The planetary roller drive type inscribed planetary gear reduction device according to claim 1, wherein the rotating surface of the planetary roller is constituted by an elastic body.
- 前記枠部材の外歯車の前記内歯車に面した側の一部は、前記駆動源の軸心と平行な回転軸を有する回転可能なピンにより形成される請求項1又は2に記載の遊星ローラ駆動型内接式遊星歯車減速装置。 The planetary roller according to claim 1 or 2, wherein a part of the outer gear of the frame member facing the internal gear is formed by a rotatable pin having a rotation axis parallel to the axis of the drive source. Driven inscribed planetary gear speed reducer.
- 前記遊星歯車の外側面に形成される内歯車の歯形はインボリュート歯形又はサイクロイド歯形のいずれかにより形成される請求項1乃至3のいずれか1項に記載の遊星ローラ駆動型内接式遊星歯車減速装置。 The planetary roller drive type inscribed planetary gear reduction according to any one of claims 1 to 3, wherein a tooth profile of an internal gear formed on an outer surface of the planetary gear is an involute tooth profile or a cycloid tooth profile. apparatus.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201680037193.5A CN107850188B (en) | 2015-04-30 | 2016-04-26 | Planetary roller driving type internal connection type planetary gear speed reducer |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015093212A JP6463212B2 (en) | 2015-04-30 | 2015-04-30 | Planetary roller drive type inscribed planetary gear reduction device |
| JP2015-093212 | 2015-04-30 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016175188A1 true WO2016175188A1 (en) | 2016-11-03 |
Family
ID=57198474
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/062988 WO2016175188A1 (en) | 2015-04-30 | 2016-04-26 | Planetary roller drive-type inscribed planetary gear reduction device |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP6463212B2 (en) |
| CN (1) | CN107850188B (en) |
| WO (1) | WO2016175188A1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3354615A1 (en) * | 2017-01-31 | 2018-08-01 | thyssenkrupp Elevator AG | Driving system for driving a conveyer band of a conveyer apparatus |
| WO2022179068A1 (en) * | 2021-02-26 | 2022-09-01 | 美的集团股份有限公司 | Internally engaged planetary gear device and robot joint device |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7463265B2 (en) * | 2020-07-29 | 2024-04-08 | 美的集団股▲フン▼有限公司 | Internally meshing planetary gear device and actuator |
| JP2022057875A (en) * | 2020-09-30 | 2022-04-11 | 日本電産株式会社 | Speed reduction device |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63135046U (en) * | 1987-02-26 | 1988-09-05 | ||
| JP2003532029A (en) * | 2000-04-27 | 2003-10-28 | セジン−アイジービー カンパニー リミテッド | Internal planetary gear transmission |
| JP2013253667A (en) * | 2012-06-08 | 2013-12-19 | Jtekt Corp | Gear device |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2739071B2 (en) * | 1990-02-21 | 1998-04-08 | 住友重機械工業株式会社 | Inner mesh planetary gearbox |
| JPH06341501A (en) * | 1993-06-03 | 1994-12-13 | Mitsubishi Heavy Ind Ltd | Planetary roller reduction gear |
| JP4888993B2 (en) * | 2005-07-12 | 2012-02-29 | 株式会社コエックス | Inscribed planetary gear mechanism (involute reduction mechanism) |
| DE102009042585A1 (en) * | 2008-12-15 | 2010-06-17 | Sew-Eurodrive Gmbh & Co. Kg | Casting, planet carrier, hollow shaft and planetary gear |
| JP5445216B2 (en) * | 2009-06-30 | 2014-03-19 | 株式会社ジェイテクト | Planetary gear mechanism |
| CN204239628U (en) * | 2014-06-27 | 2015-04-01 | 浙江伊诺环保科技有限公司 | Cycloidal planetary gear speed reducer |
-
2015
- 2015-04-30 JP JP2015093212A patent/JP6463212B2/en not_active Expired - Fee Related
-
2016
- 2016-04-26 CN CN201680037193.5A patent/CN107850188B/en active Active
- 2016-04-26 WO PCT/JP2016/062988 patent/WO2016175188A1/en active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63135046U (en) * | 1987-02-26 | 1988-09-05 | ||
| JP2003532029A (en) * | 2000-04-27 | 2003-10-28 | セジン−アイジービー カンパニー リミテッド | Internal planetary gear transmission |
| JP2013253667A (en) * | 2012-06-08 | 2013-12-19 | Jtekt Corp | Gear device |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3354615A1 (en) * | 2017-01-31 | 2018-08-01 | thyssenkrupp Elevator AG | Driving system for driving a conveyer band of a conveyer apparatus |
| WO2018141687A1 (en) * | 2017-01-31 | 2018-08-09 | Thyssenkrupp Elevator Ag | Driving system for driving a conveyer band of a conveyer apparatus |
| CN110234591A (en) * | 2017-01-31 | 2019-09-13 | 蒂森克虏伯电梯股份公司 | The drive system driven for the conveyer belt to conveying equipment |
| CN110234591B (en) * | 2017-01-31 | 2021-11-02 | 蒂森克虏伯电梯股份公司 | Drive system for driving a conveyor belt of a conveyor system |
| WO2022179068A1 (en) * | 2021-02-26 | 2022-09-01 | 美的集团股份有限公司 | Internally engaged planetary gear device and robot joint device |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107850188B (en) | 2020-02-11 |
| JP2016211614A (en) | 2016-12-15 |
| JP6463212B2 (en) | 2019-01-30 |
| CN107850188A (en) | 2018-03-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2016175188A1 (en) | Planetary roller drive-type inscribed planetary gear reduction device | |
| KR200487440Y1 (en) | Cup-type strain wave gearing unit | |
| JP3186812U (en) | Variable speed transmission bearing | |
| KR200450505Y1 (en) | Gear reducer | |
| KR101606863B1 (en) | Robotic disc for coupling Precision reducer | |
| JP2017203546A (en) | Driving device | |
| US11525502B2 (en) | Circular wave drive | |
| JP2021006740A (en) | Circular wave drive | |
| US9322464B2 (en) | Hollow drive gear reduction mechanism | |
| US10247288B2 (en) | Circular wave drive | |
| JP2013245801A (en) | Internal gear reducer utilizing planetary motion | |
| JP2016008633A (en) | Inscription gear type speed reducer | |
| JP5951420B2 (en) | Actuator | |
| US11603908B2 (en) | Speed reducer and eccentric gear of the same | |
| JP2005308131A (en) | Cup type wave gear device | |
| RU185563U1 (en) | ELECTROMECHANICAL DRIVE | |
| JP6762516B2 (en) | Combined speed change module | |
| KR20210101984A (en) | Plate harmonic reducer | |
| JP2016186313A (en) | Power transmission device | |
| TW201111666A (en) | Cycloidal gear device | |
| TWM573804U (en) | An encentric speed-reduced device | |
| CN213270922U (en) | Gear device and geared motor | |
| JP2003194158A (en) | Reduction gear adopting marvelous gear mechanism | |
| RU2722890C2 (en) | Electromechanical drive | |
| CN118775504A (en) | Harmonic differential type small tooth difference speed reducer |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16786465 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 16786465 Country of ref document: EP Kind code of ref document: A1 |