WO2014192609A1 - Moteur sans balai à rotor intérieur - Google Patents
Moteur sans balai à rotor intérieur Download PDFInfo
- Publication number
- WO2014192609A1 WO2014192609A1 PCT/JP2014/063420 JP2014063420W WO2014192609A1 WO 2014192609 A1 WO2014192609 A1 WO 2014192609A1 JP 2014063420 W JP2014063420 W JP 2014063420W WO 2014192609 A1 WO2014192609 A1 WO 2014192609A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- stator
- stator core
- brushless motor
- concave groove
- winding
- Prior art date
Links
Images


Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/46—Fastening of windings on the stator or rotor structure
- H02K3/52—Fastening salient pole windings or connections thereto
- H02K3/521—Fastening salient pole windings or connections thereto applicable to stators only
- H02K3/522—Fastening salient pole windings or connections thereto applicable to stators only for generally annular cores with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/14—Stator cores with salient poles
- H02K1/146—Stator cores with salient poles consisting of a generally annular yoke with salient poles
- H02K1/148—Sectional cores
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/22—Auxiliary parts of casings not covered by groups H02K5/06-H02K5/20, e.g. shaped to form connection boxes or terminal boxes
- H02K5/225—Terminal boxes or connection arrangements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2203/00—Specific aspects not provided for in the other groups of this subclass relating to the windings
- H02K2203/06—Machines characterised by the wiring leads, i.e. conducting wires for connecting the winding terminations
Definitions
- the present invention relates to an inner rotor type brushless motor suitable for a device using a thin and small drive source such as a robot, a small industrial device, a medical device, a model airplane, and the like.
- this brushless motor since the rotational force of the rotor can be obtained at a plurality of locations in the axial direction, a large output can be obtained even with a relatively small diameter size.
- the current value of the winding coil for each stator is smaller than when a single stator is used, it is possible to reduce the wire diameter of the winding coil or shorten the length of the winding coil. it can.
- the diameter size can be reduced to ensure a large maximum rotational speed of the rotor.
- the operation with the other winding coils is possible. For example, when applied for aircraft propulsion, the reliability can be improved.
- the prior art since it includes a plurality of stators and a plurality of winding coils corresponding to each stator, the lead wire is routed to the outside. There was a problem that it was difficult to simplify. More specifically, since there is a drive wheel (21) that rotates together with the drive shaft and the rotor between two adjacent stators, the winding coils (17, 18) of the two stators are pulled out in the same direction. It is difficult to extend in one direction and the other in the axial direction, insert the guide plates (11, 12) on both sides, pull out to the outside, and connect the lead wires pulled out in two directions to the power source.
- an inner rotor type motor having a plurality of stators arranged in the axial direction around a single drive shaft and rotor is configured, and lead wires of winding coils in the plurality of stators are arranged in the same direction on the outer diameter side.
- the present invention has been made in view of the above-described conventional circumstances, and a problem to be solved by the present invention is that it is possible to obtain a high torque with a thin multi-stage stator and to simplify the handling of the lead wire of the winding. It is an object of the present invention to provide an inner rotor type brushless motor capable of achieving the above.
- One means for solving the above problems includes a rotor having a magnet and rotatably supported, a stator core positioned around the rotor, a winding wound on an inner diameter side of the stator core, and the winding
- the inner rotor type motor having a lead wire extending from the plurality of stator cores
- the outer periphery of at least one of the plurality of stator cores is provided around the single rotor so as to be aligned in the axial direction.
- a concave groove extending in a direction intersecting with the circumferential direction is provided, and the lead wire of another stator core is arranged in the concave groove.
- the present invention is configured as described above, it is possible to obtain high torque with a thin (small diameter) configuration by a plurality of stages of stators, and to simplify the handling of the lead wires of the windings. it can.
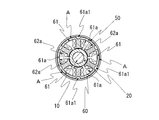
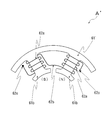
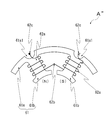
- FIG. 1 It is a longitudinal section showing an example of an inner rotor type brushless motor concerning the present invention. It is a side view of the inner rotor type brushless motor. It is sectional drawing which follows (III)-(III) of FIG. It is a side view which shows an example of a stator structural unit. It is a side view which shows the other example of a stator structural unit. It is a side view which shows the other example of a stator structural unit.
- a first feature of the present embodiment is that a rotor having a magnet and rotatably supported, a stator core positioned around the rotor, a winding wound on an inner diameter side of the stator core, and the winding
- the inner rotor type motor having a lead wire extending from the plurality of stator cores
- the outer periphery of at least one of the plurality of stator cores is provided around the single rotor so as to be aligned in the axial direction.
- a concave groove extending in a direction crossing the circumferential direction is provided, and the lead wire of the other stator core is placed in the concave groove.
- the second feature is that an inner rotor in which a plurality of salient pole portions protruding radially inward are provided on the inner circumference side of the stator core at intervals in the circumferential direction, and the winding is wound around each of the salient pole portions.
- the concave groove is provided at a position corresponding to the salient pole portion. According to this configuration, since the concave groove is provided at a position where the thickness in the radial direction is relatively large, it is possible to reduce a decrease in mechanical strength and magnetic force of the stator core due to the concave groove. Even if it is a case where it is a structure, a strength fall can be reduced.
- the concave groove penetrates the stator core in the axial direction on the outer diameter side of the salient pole part. According to this configuration, the handling of the lead wire can be improved.
- the stator core includes a plurality of independent divided cores arranged in an annular shape, and each of the divided cores has the concave groove. According to this configuration, it is possible to improve the workability when winding the winding around the salient pole part, the yield when processing the salient pole part from the raw material, and the like.
- FIG. 1 shows an example of an inner rotor type brushless motor 1 according to the present invention.
- the inner rotor type brushless motor 1 supports a rotary shaft 10 extending on a central axis, a rotor 20 fixed to the outer peripheral portion of the rotary shaft 10 so as to be integrally rotatable, and the rotary shaft 10 rotatably.
- a plurality of (two in the illustrated example) stators 60 are fixed, and the rotor 20 is rotated by the magnetic action in the stator 60 when the stator 60 is energized with the power of the brushless motor three-phase power source.
- the rotating shaft 10 is a long member formed in a solid columnar shape or a hollow cylindrical shape by a rigid material (for example, a metal material such as iron or stainless steel), and according to the illustrated example, a bearing is provided at one end side in the axial direction.
- the drive unit 11 protrudes from the bracket 40.
- the driving unit 11 may be provided on both sides in the axial direction.
- this rotating shaft 10 is rotatably supported by the bearings 30 and 30 which the both ends side of an axial direction mentions later.
- the rotor 20 has a permanent magnet fixed to the outer peripheral side of a cylindrical core made of a magnetic material, and a central portion of the core is fixed to the rotary shaft 10 so that the rotor 20 is rotatably held together with the rotary shaft 10. .
- the rotor 20 includes magnets (not shown) having a plurality of poles (for example, 2, 4, 6, 8, 12, etc.) so as to obtain a rotational force by a rotating magnetic field of the stator 60 described later. Yes.
- the bearing 30 is a ball bearing according to the illustrated example, and rotatably supports the rotating shaft 10 on both sides of the rotor 20.
- a bearing having another configuration such as a sliding bearing or a roller bearing can be used.
- a spacer 21 is annularly mounted between the rotor 20 and the bearing 30 on the outer periphery of the rotary shaft 10.
- the spacer 21 is fixed so as not to move in the axial direction with respect to the rotary shaft 10 by fixing means such as press fitting, and positions the rotary shaft 10 and the rotor 20 in the thrust direction.
- the spacer 21 is appropriately formed of a material (for example, an aluminum alloy or a rigid resin material having a relatively high wear resistance) so as to reduce the frictional resistance when sliding on the end surface of the bearing 30.
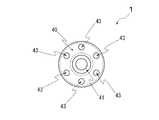
- the bearing bracket 40 is an annular member that inserts the rotary shaft 10 in the center of the bearing bracket 40 with play and holds the bearing 30 from the outer peripheral side.
- the bearing bracket 40 has an annular bearing holding recess 41 for holding the bearing 30 on the center side thereof, and a casing holding recess 42 for fitting the casing 50 in an annular shape on the outer diameter side. Furthermore, a single or a plurality of through holes 43 are provided between the bearing holding recess 41 and the casing holding recess 42 (see FIG. 2).
- the through-hole 43 is a hole for drawing a lead wire of the stator 60 described later to the outside or dissipating the heat in the casing 50.
- the through-hole 43 is formed in a circular shape and spaced in the circumferential direction. A plurality are provided. As other examples of the through-hole 43, an arc-shaped long hole or a through-hole having another shape can be used.
- the casing 50 is formed in a thin cylindrical shape from, for example, a metal material such as iron or permalloy, or a synthetic resin material, and both ends thereof are on the outer peripheral sides of the bearing brackets 40 on the left and right sides (specifically, the casing holding recesses 42).
- the ring is fitted and fixed.
- a plurality of stators 60 are arranged around the rotor 20 at a predetermined interval in the axial direction.
- Each of these stators 60 is fixed to the outer peripheral surface of the rotor 20 with an appropriate clearance, and is fixed to the inner peripheral surface of the casing 50 so that it cannot rotate and cannot move in the axial direction.
- annular spacer 60a is provided between the two adjacent stators 60, 60 to keep the distance therebetween constant.
- the annular spacer 60a is formed in a substantially annular shape (for example, a star shape having a through hole in the center) having a plurality of notches 60a1 arranged in the circumferential direction on the outer peripheral side thereof, and the end surface 60a2 in the radially outer direction is formed on the casing. 50 is press-fitted into the inner surface and fixed (see FIG. 1).
- the plurality of cutout portions 61a1 are arranged at predetermined intervals in the circumferential direction so as to correspond to the salient pole portions 61b on the inner diameter side of the stator 60, and are used as spaces for inserting windings 62a, lead wires 62c and the like to be described later. (See FIG. 1).
- Each stator 60 is formed by annularly arranging a plurality (three in the illustrated example) of independent stator constituent units A (see FIGS. 3 and 4).
- Each stator component unit A includes a split core 61 constituting a part of the stator core, a winding 62a wound around the inner diameter side of the split core 61, and the like.
- the split core 61 is formed by, for example, laminating a plurality of thin plate-like magnetic bodies such as silicon steel plates in the axial direction, and joining the steel plates by a joining means such as adhesion or doweling (fitting by unevenness).
- the split core 61 includes a split annular portion 61a formed along the inner peripheral surface of the casing 50, and a plurality of protrusions projecting radially inward from the split annular portion 61a and spaced in the circumferential direction. It is formed in a substantially fan shape having a pole portion 61b.
- the divided annular portion 61a has a shape obtained by dividing the annular member into a predetermined number (three according to the illustrated example) in the circumferential direction, and a concave groove 61a1 continuous on the outer circumferential surface in a direction intersecting the circumferential direction. A plurality.
- each concave groove 61 a 1 has a semicircular cross section, continues in a direction substantially parallel to the central axis of the stator 60, and penetrates the split core 61.
- Each concave groove 61a1 has a circumferential position that is substantially the same as the salient pole portion 61b that faces in the radially inward direction. That is, in the circumferential direction, the center position of each concave groove 61a1 and the center position of the salient pole portion 61b are substantially the same.
- the width, depth, and the like of the concave groove 61a1 are appropriately set so as to include the lead wire to be inserted.
- Each salient pole portion 61b is formed in a T-shaped cross section projecting radially inward, and a winding 62a is wound on the outer diameter side of the protruding portion on the projecting end side.
- the winding 62a is wound around each of the plurality of salient pole portions 61b.
- a connection line portion 62b connects between two windings 62a adjacent in the circumferential direction.
- lead wires 62c extend from both ends of the plurality of windings 62a.
- the plurality of windings 62a, the connecting wire portion 62b, and the lead wire 62c may be one continuous electric wire (for example, enamel-coated copper wire).
- the lead wire 62c can be a separate electric wire connected to the winding 62a.
- the two adjacent windings 62a and 62a in each stator constituent unit A are wound so as to constitute opposite poles. That is, according to an example shown in FIG. 4, the left one winding 62a is wound counterclockwise in the radially outward direction, and the right other winding 62a is clockwise in the radially outward direction. It is wound around.
- the end portion on the radially outer side of the left winding 62a is connected to the end portion on the radially inward side of the right winding 62a via the connecting wire portion 62b.
- the plurality of stator constituting units A configured as described above are gently press-fitted into the cylindrical casing 50, and the divided cores 61 and 61 adjacent in the circumferential direction are brought into contact with each other to constitute the stator 60 (see FIG. 3). .
- a plurality of (two in the illustrated example) windings 62a and 62a for each stator constituent unit A are connected to a plurality of windings 62a and 62a of another stator constituent unit A adjacent in the circumferential direction.
- they are separated and constitute separate and independent phases. That is, according to the illustrated example, the three stator constituent units A each independently constitute a U phase, a V phase, and a W phase.
- the lead wire 62c of each phase (in other words, for each stator component unit A) of the stator 60 on one side (the left side in FIG. 1) is connected to one bearing bracket 40. It is inserted through the through hole 43 and pulled out.
- the lead wires 62c of the respective phases of the stator 60 on the other side (right side in FIG. 1) are inserted into the recessed grooves 61a1 of the stator 60 on the one side (left side in FIG. 1), and further on the one bearing. It is inserted into the through hole 43 of the bracket 40 and pulled out.
- lead wires 62c are electrically connected to the same phase, and are connected to each phase of a three-phase power source for a brushless motor (not shown). That is, the plurality of stators 60 are connected in parallel to the brushless motor three-phase power source.
- each divided core 61 has a shape in which an annular ring is equally divided, it is possible to improve the yield when processing the core from raw materials, compared to the case of using an integral annular stator core.
- the plurality of windings 62a are configured to have the same phase for each stator configuration unit A, for example, compared with a case where a plurality of windings 62a having the same phase are connected across the plurality of stator configuration units A, Manufacturability can be improved and parts management can be facilitated.
- the plurality of windings 62a that form the same phase and do not extend over the plurality of divided cores 61 electrical or magnetic resistance or loss can be reduced, and motor efficiency can be improved. .
- the lead wires 62c of the plurality of stators 60 arranged in the axial direction can be guided in the same direction along the concave groove 61a1 on the outer peripheral surface of the split core 61.
- the inner rotor type brushless motor 1 is manufactured.
- the efficiency of the motor can be improved by relatively increasing the space factor of the winding 62a between the salient pole portions 61b adjacent in the circumferential direction.
- the concave groove 61a1 is provided on the base end side of the salient pole portion 61b having a relatively large radial thickness, the mechanical strength and magnetic force of the stator core due to the concave groove 61a1 can be reduced, and the slimmer Can be configured.
- groove 61a1 was provided in the linear form substantially parallel with respect to the centerline of the stator 60, as an other example, the aspect which inclined the ditch
- groove 61a1 was arrange
- groove 61a1 was arrange
- the split cores 61 and 61 adjacent in the circumferential direction are brought into contact with each other so that magnetic flux leaks from the outside to the outside and the electronic device or the like is not adversely affected.
- a structure may be employed in which a gap is formed between the split cores 61 adjacent to each other in the circumferential direction, and the lead wire 62c is inserted into the gap.
- stator 60 was connected in parallel with the three-phase power supply for brushless motors, as another example, a plurality of stators 60 may be connected in series with the three-phase power supply for brushless motors. Is possible.
- groove 61a1 was provided with respect to all the division
- adjacent windings 62a and 62a of each stator constituent unit A are configured as opposite poles
- the adjacent windings 62a and 62a are wound in opposite directions.
- adjacent windings 62 a and 62 a may be wound in the same direction so that they are excited to opposite poles. That is, in the stator component unit A ′′ shown in FIG. 6, both the left and right windings 62a are wound in the same direction (counterclockwise) toward the radially outer direction, and the left winding 62a is disposed on the radially inner side.
- the end portion is connected to the end portion on the radially inner side of the right winding 62a via the connecting wire portion 62b. Therefore, when these two continuous windings 62a and 62a are energized, the corresponding two salient pole portions 61b and 61b are opposite to each other (when one of the tips is an N pole, the other tip is an S pole). Will be excited.
- two adjacent windings 62a and 62a are configured to be independent and not continuous, and are wound in the same direction, and the two independent windings 62a and 62a are reverse in current direction. It is also possible to connect the adjacent windings 62a and 62a of the stator unit A to the opposite poles.
- the stator core is configured by the plurality of split cores 61 having the concave grooves 61a1, but as another example, the stator core is an integral annular member (not shown), It is also possible to provide a mode in which a concave groove 61a1 extending in a direction crossing the direction is provided, and the lead wire 62c is placed in the concave groove 61a1.
- Inner rotor type brushless motor 20 Rotor 60: Stator 61, 61 ': Split core (stator core) 61a: Divided annular part 61a1: Groove 61b: Salient pole part 62a: Winding 62c: Lead wire A, A ', A ": Stator component unit
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
- Insulation, Fastening Of Motor, Generator Windings (AREA)
Abstract
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE112014002642.5T DE112014002642T5 (de) | 2013-05-31 | 2014-05-21 | Bürstenloser Motor des Innenläufertyps |
| JP2015519808A JPWO2014192609A1 (ja) | 2013-05-31 | 2014-05-21 | インナーロータ型ブラシレスモータ |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013115988 | 2013-05-31 | ||
| JP2013-115988 | 2013-05-31 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2014192609A1 true WO2014192609A1 (fr) | 2014-12-04 |
Family
ID=51988642
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2014/063420 WO2014192609A1 (fr) | 2013-05-31 | 2014-05-21 | Moteur sans balai à rotor intérieur |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JPWO2014192609A1 (fr) |
| DE (1) | DE112014002642T5 (fr) |
| WO (1) | WO2014192609A1 (fr) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016178834A (ja) * | 2015-03-20 | 2016-10-06 | スズキ株式会社 | 回転電機 |
| JP2019525697A (ja) * | 2016-07-07 | 2019-09-05 | エルジー イノテック カンパニー リミテッド | ステータユニット、ステータおよびこれを含むモータ |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106712327B (zh) * | 2016-12-15 | 2019-02-19 | 广东威灵电机制造有限公司 | 电机 |
| EP3883096A1 (fr) * | 2020-03-16 | 2021-09-22 | Igor Mykolayovych Lapin | Générateur d'électricité |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57192752U (fr) * | 1981-05-29 | 1982-12-07 | ||
| JP2009136101A (ja) * | 2007-11-30 | 2009-06-18 | Mitsubishi Electric Corp | モータ及びそれを備えた冷媒圧縮機 |
| JP2009291031A (ja) * | 2008-05-30 | 2009-12-10 | Namiki Precision Jewel Co Ltd | ブラシレスモータ |
-
2014
- 2014-05-21 WO PCT/JP2014/063420 patent/WO2014192609A1/fr active Application Filing
- 2014-05-21 JP JP2015519808A patent/JPWO2014192609A1/ja active Pending
- 2014-05-21 DE DE112014002642.5T patent/DE112014002642T5/de not_active Withdrawn
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57192752U (fr) * | 1981-05-29 | 1982-12-07 | ||
| JP2009136101A (ja) * | 2007-11-30 | 2009-06-18 | Mitsubishi Electric Corp | モータ及びそれを備えた冷媒圧縮機 |
| JP2009291031A (ja) * | 2008-05-30 | 2009-12-10 | Namiki Precision Jewel Co Ltd | ブラシレスモータ |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016178834A (ja) * | 2015-03-20 | 2016-10-06 | スズキ株式会社 | 回転電機 |
| JP2019525697A (ja) * | 2016-07-07 | 2019-09-05 | エルジー イノテック カンパニー リミテッド | ステータユニット、ステータおよびこれを含むモータ |
| JP7148412B2 (ja) | 2016-07-07 | 2022-10-05 | エルジー イノテック カンパニー リミテッド | ステータユニット、ステータおよびこれを含むモータ |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112014002642T5 (de) | 2016-03-31 |
| JPWO2014192609A1 (ja) | 2017-02-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2015104893A1 (fr) | Moteur de type à entrefer axial | |
| US20170331336A1 (en) | Stator core for rotating electrical machine, rotating electrical machine, and method of manufacturing rotating electrical machine | |
| JP2002262528A5 (fr) | ||
| JP2000253635A (ja) | アキシャルギャップモータ | |
| US10931154B2 (en) | Axial-gap type motor | |
| JP2009005572A (ja) | 磁気誘導子形同期回転機およびそれを用いた自動車用過給機 | |
| WO2014192609A1 (fr) | Moteur sans balai à rotor intérieur | |
| US20150171673A1 (en) | System and method for retaining rotor structure in synchronous reluctance machine | |
| EP2568585A2 (fr) | Procédé de fabrication de machine électrique rotative et machine électrique rotative | |
| JP2006271142A (ja) | 回転機 | |
| WO2014192608A1 (fr) | Moteur sans balais à rotor interne | |
| US20190312476A1 (en) | Motor | |
| JP2005151785A (ja) | リング状の電機子コイルを有する同期発電機 | |
| JP2014073011A (ja) | 回転電機用ステータ及び回転電機 | |
| JP4415176B2 (ja) | リング状の固定子コイルを有する誘導電動機 | |
| JP4482918B2 (ja) | リング状の固定子コイルを有する永久磁石型電動機 | |
| JP2018125993A (ja) | 回転電機 | |
| JP5496159B2 (ja) | 円筒型リニアモータ及び円筒型リニアモータの固定子コイルの巻装方法 | |
| JP6745212B2 (ja) | 回転子およびリラクタンス回転電機 | |
| WO2017175461A1 (fr) | Machine électrique tournante à entrefer axial | |
| KR102697517B1 (ko) | 코깅리스 코어리스 bldc 모터 | |
| US20240313613A1 (en) | Back-yokeless magnetic-bearing-integrated motor | |
| JP2018166354A (ja) | アキシャルギャップ型モータおよびその製造方法 | |
| KR20100094603A (ko) | 교량철심 발전기 기구 | |
| WO2014203849A1 (fr) | Machine électrique rotative et procédé de fabrication de machine électrique rotative |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14804419 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2015519808 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 112014002642 Country of ref document: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 14804419 Country of ref document: EP Kind code of ref document: A1 |