WO2012057592A2 - System and method for monitoring railroad facilities using a railway vehicle - Google Patents
System and method for monitoring railroad facilities using a railway vehicle Download PDFInfo
- Publication number
- WO2012057592A2 WO2012057592A2 PCT/KR2011/008232 KR2011008232W WO2012057592A2 WO 2012057592 A2 WO2012057592 A2 WO 2012057592A2 KR 2011008232 W KR2011008232 W KR 2011008232W WO 2012057592 A2 WO2012057592 A2 WO 2012057592A2
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- information
- unit
- image
- vehicle
- data
- Prior art date
Links
- 238000012544 monitoring process Methods 0.000 title claims abstract description 29
- 238000000034 method Methods 0.000 title claims description 21
- 238000007689 inspection Methods 0.000 claims abstract description 19
- 238000004364 calculation method Methods 0.000 claims description 26
- 230000007547 defect Effects 0.000 claims description 14
- 230000001133 acceleration Effects 0.000 claims description 7
- 238000001514 detection method Methods 0.000 claims description 7
- 238000005259 measurement Methods 0.000 claims description 7
- 238000005286 illumination Methods 0.000 claims description 5
- 238000013480 data collection Methods 0.000 claims description 4
- 238000003745 diagnosis Methods 0.000 claims description 2
- 230000002950 deficient Effects 0.000 claims 1
- 238000010586 diagram Methods 0.000 description 5
- 238000004458 analytical method Methods 0.000 description 4
- 238000012423 maintenance Methods 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 239000012212 insulator Substances 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 208000025174 PANDAS Diseases 0.000 description 1
- 208000021155 Paediatric autoimmune neuropsychiatric disorders associated with streptococcal infection Diseases 0.000 description 1
- 240000000220 Panda oleosa Species 0.000 description 1
- 235000016496 Panda oleosa Nutrition 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- 230000000740 bleeding effect Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000003203 everyday effect Effects 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 230000014509 gene expression Effects 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L23/00—Control, warning or like safety means along the route or between vehicles or trains
- B61L23/04—Control, warning or like safety means along the route or between vehicles or trains for monitoring the mechanical state of the route
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61K—AUXILIARY EQUIPMENT SPECIALLY ADAPTED FOR RAILWAYS, NOT OTHERWISE PROVIDED FOR
- B61K9/00—Railway vehicle profile gauges; Detecting or indicating overheating of components; Apparatus on locomotives or cars to indicate bad track sections; General design of track recording vehicles
- B61K9/08—Measuring installations for surveying permanent way
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/0081—On-board diagnosis or maintenance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L23/00—Control, warning or like safety means along the route or between vehicles or trains
- B61L23/04—Control, warning or like safety means along the route or between vehicles or trains for monitoring the mechanical state of the route
- B61L23/041—Obstacle detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L23/00—Control, warning or like safety means along the route or between vehicles or trains
- B61L23/04—Control, warning or like safety means along the route or between vehicles or trains for monitoring the mechanical state of the route
- B61L23/042—Track changes detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L27/00—Central railway traffic control systems; Trackside control; Communication systems specially adapted therefor
- B61L27/50—Trackside diagnosis or maintenance, e.g. software upgrades
- B61L27/53—Trackside diagnosis or maintenance, e.g. software upgrades for trackside elements or systems, e.g. trackside supervision of trackside control system conditions
Definitions
- the present invention relates to a railroad facility monitoring system using a railroad vehicle, comprising a surveillance camera mounted on a tracked vehicle to acquire and store images of railroad tracks, tram lines and other structures, and to generate noise and vibration sensors.
- the present invention relates to a railroad facility monitoring system and method using a tracked vehicle for remotely monitoring the acquired noise and vibration data, and transmitting and storing each acquired data to a center system and transmitting the data to a terminal of a situation room.
- Korean Utility Model Registration Application No. 10-2002-0017365 discloses a crack detection and image processing apparatus for concrete structures, which may occur in tunnels such as subways or roads, as well as leaking points and corrosion. By detecting and processing the back light, the processed image is displayed through the in-house computer system so that the crack of the tunnel can be easily determined.
- Korean Patent Registration No. 10-0898061 discloses a hybrid tunnel scanning device, which includes a laser and an image at the same time, and analyzes the contents of the data in real time from the laser scanning data, Lining damage and facilities), and derive the coordinate values of the corresponding location, based on the coordinate value, the hybrid tunnel scanning device capable of more accurate and efficient scanning by taking a local image and data acquired Providing.
- the hybrid tunnel scanning system is composed of a laser scanner, an image acquisition device, an image acquisition device driver and a self-propelled bogie, the laser scanner lining the tunnel And it is mounted to the front of the moving direction of the self-propelled bogie as primarily for performing the scanning of the inside of the tunnel, such as facilities.
- measurement data detected by the laser scanner is transmitted to the laser scanner controller while the self-propelled bogie moves the tunnel in the axial direction, and the laser scanner controller acquires the measured measurement.
- the characteristics and coordinates of the photographing location are extracted from the data, the abnormalities or the additional observation points are determined, and the coordinate values are transmitted to the image acquisition apparatus driving control unit.
- the image acquisition device driving control unit transfers the coordinate values received through the laser scanner control unit to the image acquisition device, the image acquisition device captures the coordinates thereof and acquires the image data, and the image acquisition device control unit acquires the local image. do.
- the data measured by the laser scanner is used for facility management for virtual engineering by the laser scanner control unit, and the image processing and analysis through the image acquisition device control is implemented as a comprehensive tunnel maintenance system.
- the defect portion and the additional photographing part are captured by the image capturing device through the image capturing apparatus, thereby obtaining image data, thereby enabling faster and more accurate in the tunnel.
- Scanning is possible, and the image can have a three-dimensional coordinate value by combining laser scanning and image scanning, and thus various expressions can be provided, thereby providing a hybrid tunnel scanning apparatus that can be implemented as a comprehensive tunnel maintenance system.
- the hybrid tunnel scanning apparatus can only diagnose defects such as deformation or cracks in the structure of the tunnel wall mainly by scanning data obtained by performing laser scanning first and second image scanning. There was a problem in diagnosing a state of a tram line or track.
- the present invention stores the images obtained through the tunnel structure monitoring camera, the tramline monitoring camera and the track monitoring camera mounted on the tracked vehicle, and transmits to the server unit to store and transmit them to the terminal room terminal remotely to each facility
- the purpose of the present invention is to provide a railroad facility inspection system using tracked vehicles to search and inspect the vehicle.
- Another object of the present invention is equipped with a noise / vibration information collecting device on the track vehicle and transmitted to the server unit along with the image information, and obtained through the vibration, noise and tilt sensor of the track vehicle for analyzing the riding comfort of the track vehicle as well as the image. To provide the corrected information.
- Another object of the present invention is to provide a tunnel structure monitoring camera, a catenary surveillance camera, a track monitoring camera mounted on a single track vehicle, as well as a track, vibration and noise sensor of each track structure, tram line and track. It is not only possible to acquire image information and vibration, noise and tilt data of a track vehicle at the same time, but also to store and provide the image information and track vehicle vibration, noise and tilt data in synchronization with the position information by position information calculation. There is this.
- Another object of the present invention is to determine that the image is obtained from the vibration sensor and the noise sensor and the vibration / noise data obtained from the same position more than the reference value set in the same position to determine the alarm position and alert.
- the railroad facility inspection system using a track vehicle includes an information acquisition device for acquiring information while mounting and moving a sensor unit and a surveillance camera unit on a track vehicle, and storing data wirelessly transmitted from the information acquisition device in a database.
- a railway facility inspection system using a track vehicle comprising a server unit for transmitting to a situation room terminal for searching, editing, and diagnosing data obtained while moving a track vehicle, the information acquisition device comprising: an illumination unit driven in synchronization with a shutter of the surveillance camera unit; A sensor unit for obtaining vibration and noise information of the tracked vehicle; A location information calculation unit for counting and providing driving location information of the track vehicle; And a controller configured to control driving of the lighting unit, and to wirelessly transmit the image information obtained from the surveillance camera unit, the vibration and noise information obtained from the sensor unit, and the position information obtained through the location information calculator to the server unit.
- the server unit comprises: an image storage server configured to store image information transmitted from the information acquisition device in the database in synchronization with distance information together with noise and vibration data; An image search server for searching and editing images stored in the database; A file server that manages meta information on data stored in the database and enables the situation room terminal to search and edit the data; And a DB management server for managing a database of the image data stored in the database.
- Railroad facility information acquisition process using a tracked vehicle to achieve another object of the present invention is obtained by mounting and moving the information acquisition device including a camera unit, a lighting unit, a sensor unit, a location information calculation unit consisting of a plurality of surveillance cameras on the tracked vehicle.
- each image photographed by each surveillance camera by the information acquisition device A first step of acquiring the noise and vibration data acquired by the sensor unit and the distance information from the position information calculating unit and transmitting the noise and vibration data to the server unit to store in a database; A second step of calculating, by the server unit, an acquisition position of each image, noise and vibration data by synchronizing each image, noise and vibration data stored in a database with the position information; And a third step of transmitting each image, noise, and vibration data stored in synchronization with the location information in the database to the situation terminal.
- the information acquisition device After collecting the noise and vibration data obtained from the noise and vibration sensor mounted on the track vehicle through the information acquisition device, calculating the acquisition position of the noise and vibration data in synchronization with the position information; And determining that the image, noise, and vibration data are determined as a defect section when a predetermined reference value or more is obtained.
- the railroad facility inspection system using the track vehicle according to the present invention stores the separate specific images obtained through the tunnel structure monitoring camera, the tramline monitoring camera and the track monitoring camera mounted on one tracked vehicle, and transmits them to the server unit. Since it is stored and sent to the situation terminal, tunnel structures, tram lines and tracks can be checked and analyzed remotely.
- the present invention has the effect that can analyze the riding comfort of the vehicle by the information collected through the noise / vibration, tilt information collection sensor to the tracked vehicle.
- FIG. 2 is an overall configuration diagram of a railway facility inspection system using a track vehicle according to an embodiment of the present invention
- Figure 3a, 3b is an overall configuration of the railroad facility inspection system using a tracked vehicle according to another embodiment of the present invention
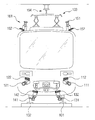
- FIGS. 4 and 5 are front and side views of the tracked vehicle equipped with each surveillance camera according to an embodiment of the present invention.
- 6A to 6C are diagrams illustrating an embodiment of an image acquired through each surveillance camera and an image collected through a noise / vibration sensor.
- FIG. 7 is a graph illustrating an embodiment of an image and a noise / vibration signal collected through an image and a noise / vibration sensor acquired through each surveillance camera.
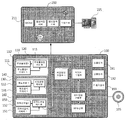
- FIG. 2 is a block diagram of a railroad facility inspection system using a tracked vehicle according to an embodiment of the present invention
- the information acquisition device 100 is mounted on the tracked vehicle to obtain the railroad facility image and noise, vibration data and the information It is composed of a server unit 200 for transmitting the image, noise and vibration data from the acquisition apparatus 100 to the situation room terminal 221 to receive, store and analyze the radio transmission.
- the information acquiring device 100 includes a camera unit 111 for acquiring railway facilities mounted on a track vehicle, an illumination unit 112 driven in synchronization with a shutter of the camera unit 111, and the track vehicle.
- Sensor unit 190 for acquiring vibration and noise information
- tacommeter 186 for counting and providing driving position information of the tracked vehicle, and driving control of the lighting unit 112, and image information obtained from the camera unit.
- controller 170 for wirelessly transmitting the vibration and noise information obtained from the sensor unit and the position information obtained through the position information calculation unit to the server unit.
- the server unit 200 stores the image information transmitted from the information acquisition device 100 in the database 210 in synchronization with the location information along with the noise and vibration data, and the database ( Image search server 213 for searching and editing the image stored in the 210, and the file server for managing the meta information about the data stored in the database 210, the situation terminal 221 to search and edit ( 214 and a DB management server 211 for database management for the image, noise, vibration data stored in the database 210.
- Figure 3a is a block diagram of a railroad facility inspection system using a track vehicle according to another embodiment of the present invention
- the information acquisition device 100 is mounted on the left and right of the front of the track vehicle to monitor the left and right environment of the tunnel
- Left and right structure image acquisition devices 110 and 120 for acquiring an image
- left and right track image acquisition devices 130 mounted on the front left and right sides of a tracked vehicle, respectively, to acquire images of left and right tracks.
- 140 and left and right tramline image acquisition devices 150 and 160 for acquiring left and right images of a tramline, respectively, and are mounted inside a tracked vehicle to acquire noise, vibration and tilt data of a vehicle while driving.
- Noise sensor 191, vibration sensor 192 and inclination sensor 193, location information calculation unit 180 for obtaining location information when the track vehicle is running, and each of the sensors 191 to 193 and location information calculation
- a data collector 173 for collecting each data from the unit 180; Group receives the respective data from the data acquisition unit 173, the location information is composed of location information the vehicle information storage unit 171 (172) for storing in synchronism with each of the acquired data according to the calculation section 180.
- the position information calculation unit 180 is composed of a tachometer for measuring the number of revolutions of the wheel 105 or an acceleration sensor for measuring the driving acceleration of the tracked vehicle.
- the left and right structure image obtaining apparatuses 110 and 120 illuminate according to the shutter speeds of the structure monitoring cameras 111 and 121 and the structure monitoring cameras 111 and 121 for acquiring an image of the structure.
- the left and right track image acquisition devices 130 and 140 are mounted on the front left and right sides of the tracked vehicle, and the left and right track track cameras 131 which acquire images of the left and right tracks 101 and 102. 141, each of the track lights 132 and 142 that irradiate lights according to the shutter speeds of the track cameras 131 and 141, and the track lights 132 and 142 of the tracks. It consists of a track lighting control unit 133 for controlling to drive in synchronization with the shutter speed of the monitoring cameras (131, 141).
- the left and right tramline image acquisition devices 150 and 160 monitor left and right tramline which acquires images of the tramline 104 on the left and right sides of the roof of the tracked vehicle on which the upper pantagraph 103 of the tracked vehicle is installed.
- It is composed of a catenary light control unit 153 for controlling to drive in synchronization with the shutter speed of each of the catenary cameras (151, 161).
- the server unit 200 is a database 210 for receiving and storing the vehicle information obtained by the information acquisition device 100 via a wireless Internet or a local area wireless communication network, and a database for each data stored in the database 210.
- DB server 211 for establishing and managing the image
- image storage server 212 for storing the image and the ride comfort analysis data of the database 210
- image search server for searching the image
- ride comfort analysis data of the database 210 123 a file server 124 that manages meta information about data stored in the database 210 and enables the situation terminal 221 to be searchable and editable.
- the track vehicle using the track such as a train, subway or train
- the front and surrounding environment image, the track image and the tram line image supplied with power the vehicle vibration, noise for analyzing the riding comfort And acquire and store data of the detected tilt.
- 4 and 5 are mounted on the front and top of the track vehicle according to an embodiment of the present invention is a mounting view of the surveillance camera and lighting device for image acquisition, two structure surveillance cameras on the front left and right center height of the track vehicle Mounting the 111 and 121 and each of the structure lights 112 and 122, while driving the track vehicle, to obtain an image of the surrounding environment in front of the track vehicle.
- the front image obtained from the surveillance camera of one of the left or right structure surveillance cameras 111 and 121 is transmitted to the server unit 200 in real time through a wireless LAN or a WiBro network and displayed on the situation room monitor for real-time monitoring. To be done.
- a structure video obtained by installing a separate video camera on one side of the front or rear side of the tracked vehicle is transferred to the operation room through the WiBro network. It transmits remotely, so that the vehicle can be monitored in real time while driving.
- FIG. 6A illustrates an image obtained by the structure surveillance cameras 111 and 121.
- the vehicle information storage unit 171 may be obtained by obtaining an entire front image including a front environment of a tunnel, a wall, a ceiling, a tramline, and a track. ).
- the structure lighting control unit 113 controls the lighting according to the shutter speed during high-speed shutter speed shooting to obtain a clear shot image during high-speed operation, and selects the best shooting position and the shooting angle for monitoring the key point.
- the underground tunnel section is dark because there is no lighting, so it is necessary to secure enough lighting brightness for high-speed camera image acquisition.It depends on the lighting projection method, the type of lighting used, or the angle of projection. It should be adjusted.
- each of the surveillance cameras 111 and 121 should be set to adjust the angle through the camera test in order to ensure a clear image of the upper and left and right portions of the tunnel, and the illumination of sufficient brightness for shooting in the far distance must be provided. .
- FIG. 6B illustrates an image obtained by the track monitoring cameras 131 and 141, and two track monitoring cameras 131 and 141 and respective track lightings to the left and right of the front lower end of the track vehicle.
- 132 and 142 are mounted to acquire left and right track 101 and 102 images.
- the trajectory monitoring image adjusts the photographing angle and the focus of the camera to obtain the intermediate distance image, not the far image as in the structure image of FIG. 6A.
- FIG. 6C illustrates an example of a tramline image obtained by the tramline surveillance cameras 151 and 161.
- the tramline surveillance cameras 151 and 161 mounted on one side of the left and right sides of the panda graph 103 and each of The left and right images of the tramline are acquired by driving the tramline lights 152 and 162.
- the tramline surveillance cameras 151 and 161 should acquire a clear image for monitoring the power supply line and insulator portion of the tramline 104, insulator clips and bolts, and the tramline surveillance cameras 151 and 161 are tracked vehicles. Since it is installed on the roof surface of the tram line 104 to be photographed, the camera focus and lighting must be adjusted for close range shooting.
- Each of the surveillance cameras 111 to 161 uses a high-speed special imaging camera and must obtain a real-time image from a train operating at a high speed, and must continuously capture a still image rather than a video to obtain a clear image.
- a clear still image is obtained at a high shutter speed of 1/2000 second or more.
- a sufficient amount of light is required. In other words, bright lighting is required, and the flash type lighting is brighter than the regular scanning method, so that the flash type lighting is driven in synchronization with the shutter speed of the camera.
- the tracked vehicle travels 25 meters per second at 90 km / h. Assuming the camera's shooting angle is 2 m, more than 13 frames per second are required. Therefore, in order to acquire a clear still image, an image acquisition of 15 FPS or more is obtained.
- each of the illumination and lighting control unit 112, 113, 132, 133, 152, 153 of each image acquisition device (110 ⁇ 160) is the brightness of 1 / 2500sec or more It must be guaranteed, it must support hardware trigger synchronization, and it must support 100SPS (Spot Per Sec).
- each sensor data obtained from the sensors 191 to 193 mounted on one side of the lower seat of the tracked vehicle is transmitted to the vehicle information storage unit 171 through the data collection unit 173 and stored.
- the data collector 173 stores the distance and location information converted by the location information calculator 180 in the vehicle information storage unit 171 and 172 at the same time.
- the position information calculation unit 180 is equipped with a tachometer 186 on one side of the wheel 105 of the vehicle to convert the distance information and position information according to the rotation speed of the wheel.
- Another embodiment of the position information calculation unit 180 provides the driving acceleration of the vehicle measured using a three-axis acceleration sensor such as a gyro sensor converted into distance and position information.
- a three-axis acceleration sensor such as a gyro sensor converted into distance and position information.
- the location information calculation unit 180 starts the distance measurement when starting from each station, and ends the distance measurement when stopping at the next stop. That is, by repeating this for each station, the distance and position information between stations of the tracked vehicle are calculated and stored.
- the RF receiver 181 is mounted on the tracked vehicle, and the RF receiver 181 receives the RF signal from the RF transmitter (not shown) provided in each station, and thus the position information calculator 180. Reset the measuring position of to start the re-measurement.
- the actual position coordinate (latitude and longitude) information of each station is stored in the vehicle information storage units 171 and 172.
- the RF signal is received from the RF receiver 181 whenever passing through each station to recognize the actual position coordinate information of the current station.
- the location information calculation unit 180 recalculates the distance data based on the recognized actual location coordinate information, thereby obtaining a more accurate location.
- the position information of the tracked vehicle is transmitted and stored in the data collection unit 173, and the position information of the tracked vehicle is synchronized with the image data when the tracked vehicle moves between stations, so that the position of acquiring each image data can be determined.
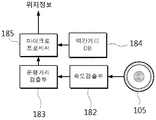
- 3B is a block diagram of a location information calculation unit according to another embodiment of the present invention, wherein the location information calculation unit 180 receives a rotation pulse from a sensor installed in a wheel 105 of a tracked vehicle to detect a speed thereof.
- the driving unit 173 receives a driving distance input from the driving distance detecting unit 183 and the driving distance detecting unit 183 that calculates the driving distance of the tracked vehicle based on the signal output from the speed detecting unit, and the reverse distance information.
- the microprocessor 185 calculates the position information of the tracked vehicle based on the reverse distance data input from the stored reverse distance database 184 and outputs the position information of the track vehicle to the data collection unit 173.
- the position information calculation unit 180 configured as described above is configured to generate a speed and speed by the rotation speed input from the rotation detection sensor (not shown) installed on the wheel 105 by the speed detection unit 173 and the travel distance detection unit 183. Calculate the distance traveled.
- the travel distance calculated by the travel distance detection unit 183 receives the distance information between the stations from the station distance database 184 in the microprocessor 185 and calculates the distance and position information when the track vehicle starts again to collect the data.
- the image data is stored in the vehicle information storage units 171 and 172 through the unit 173.
- the vehicle information storage units 171 and 172 not only provide the structure, track, and tramline image data to the position data input from the position information calculation unit 180, but also the noise, vibration, and slope data (not shown in the drawing). Synchronize time) so that each data location can be identified.
- the three-axis acceleration sensor of the X, Y, Z axis configured in one embodiment of the vibration sensor 193 is obtained by the vibration data in real time, so as to display in the track position area when providing the track status data matching the time domain and time table Vibration and noise data can be displayed in the frequency domain in real time.
- the vehicle information storage unit 171 and 172 wirelessly transmit the acquired and stored vehicle information to the server unit 200 through the control unit 170 or by configuring a removable storage device to separate from the vehicle every day or at regular intervals, and Direct connection to the database 210 of the server unit 200 to be stored.
- the vehicle information storage unit 171, 172 is required to obtain a still image of at least 15 FPS for the left, right image of the structure, track, the tram line, so that a large amount of image data is stored at least two or more vehicle information
- the storage unit 171 and 172 may be configured to not only distribute the load of the real-time video storage but also to easily replace the storage device.
- the server unit 200 supports a high-speed network to store, search, and edit images transmitted from the vehicle information storage units 171 and 172 of each track vehicle in the database 210, and a file server 214. Provided to the situation room terminal 221 through.
- the database 210 is a large storage device, and supports read / write performance of up to 2GB / s.
- the image storage server 212 provides a gateway server function for storing the image obtained from the tracked vehicle in the database 210.
- the image search server 213 is a server that performs a function of searching and editing an image stored in the database 210, and the file server 214 manages meta information about data stored in the database 210.
- the situation room terminal 221 performs a gateway function to enable the search for the image data stored in the database 210
- the DB server 211 manages a database for the image data stored in the database 210 Perform
- the situation room terminal 221 is displayed through the server unit 200.
- the situation terminal 221 displays each video signal and noise / vibration signal on a monitor, extracts an image and noise / vibration signal that are expected to cause a defect, and calculates and alerts to a defect occurrence position.
- each of the image signals CH01 to CH06 acquired from the surveillance cameras 111 to 161 are each composed of a series of similar images, each of which is a high-speed photographed structure, track, and tramline image data.
- the average value of is calculated and set as the reference image, and when it deviates from the reference image signal, it is extracted as an image that is expected to cause defects.
- the expected position of the extracted defect occurrence image is synchronized with the position information, and the position data is calculated by the position information, thereby accurately calculating the position of the image where the defect occurrence is expected.
- each signal obtained from the noise, the vibration sensor 191, 192 or the tilt sensor 193 is extracted with the noise or vibration data filtering the white noise and the vehicle's own vibration as shown in the CH08, CH09 signal of FIG. If the extracted noise or vibration data is larger than the reference value set as the average value, it is determined that a defect is generated at the corresponding position.
- the noise and vibration signals determine that a major defect has occurred at the corresponding position and alert through the situation terminal 221.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Train Traffic Observation, Control, And Security (AREA)
Abstract
The present invention relates to a system for monitoring railroad facilities using a railway vehicle. The system for monitoring railroad facilities comprises an information-acquiring device which is formed by mounting a monitoring camera on a railway vehicle, which acquires and saves images of tunnel structures, rail lines, and electric vehicle lines while mobile, and which saves noise and vibration data collected by a sensor unit mounted on the railway vehicle; and a server unit which receives data collected by the information-acquiring device, saves the received data in a database, and provides a terminal of a control center with images and data saved in the database for inspection of the images and data. According to the present invention, tunnel structures, rail lines and electric vehicle lines can be inspected and analyzed from a remote location.
Description
본 발명은 철도 차량을 이용한 철도시설물 감시 시스템에 관한 것으로, 궤도차량에 감시카메라를 장착하여 철도궤도, 전차선 및 기타 구조물에 대한 영상을 획득 및 저장하고, 소음 및 진동센서를 장착하여 차량운행시 발생되는 소음 및 진동데이터를 획득 및 저장한 후, 획득된 각 데이터를 센터시스템에 전송 및 저장하고, 상황실 단말기로 전송하여 원격 모니터링하도록 하는 궤도차량을 이용한 철도시설물 감시시스템 및 방법에 관한 것이다.The present invention relates to a railroad facility monitoring system using a railroad vehicle, comprising a surveillance camera mounted on a tracked vehicle to acquire and store images of railroad tracks, tram lines and other structures, and to generate noise and vibration sensors. The present invention relates to a railroad facility monitoring system and method using a tracked vehicle for remotely monitoring the acquired noise and vibration data, and transmitting and storing each acquired data to a center system and transmitting the data to a terminal of a situation room.
최근 지하철 또는 일반 차량의 도로 터널등이 노후됨에 따라 구조물들의 결함이 많이 발생하여 신속한 유지보수가 필요하다. 특히 일반 철도 또는 지하철과 같은 도시철도의 경우 한번에 많은 승객이 탑승 이용하는 운송수단이기 때문에 차량 또는 구조물 등의 시설물의 결함 발생은 곧 대형 사고로 이어지기 쉽기 때문에 주기적으로, 신속하고 정확한 구조물의 상태 점검 및 안전진단을 필요로 하고 있다.As the road tunnels of subways or general vehicles are deteriorated in recent years, there are many defects in structures, and therefore, rapid maintenance is required. In particular, in the case of urban railways such as general railways or subways, since a large number of passengers ride and ride at a time, defects in facilities such as vehicles or structures are likely to lead to large-scale accidents. Safety diagnosis is required.
이를 위해 일반적으로 사용하더 관리자들이 차량이 운행되지 않는 시간을 이용하여 직접 이동하면서 육안으로 확인관찰 뿐만 아니라, 보다 빨리 많은 구간의 구조물들을 점검 및 안전진단을 위해서는 첨단기술이 절실히 필요한 실정이다.In order to do this, managers generally use the time when the vehicle is not running, and not only visual observation and observation, but also advanced technology is needed to inspect and check the safety of many sections faster.
종래기술에 따른 국내 실용신안등록출원 10-2002-0017365는 콘크리트 구조물의 크랙검출 및 영상처리장치를 개시하고 있으며, 이는 지하철이나 도로 등의 터널에 발생할 수 있는 크랙은 물론 누수 발생개소와 부식 발생 상황 등을 검출 및 처리하여 사내의 컴퓨터 시스템을 통하여 처리화상을 디스플레이하여 터널의 크랙등을 용이하게 판단할 수 있도록 하고 있다.Korean Utility Model Registration Application No. 10-2002-0017365 according to the prior art discloses a crack detection and image processing apparatus for concrete structures, which may occur in tunnels such as subways or roads, as well as leaking points and corrosion. By detecting and processing the back light, the processed image is displayed through the in-house computer system so that the crack of the tunnel can be easily determined.
또한, 종래기술에 따른 국내특허등록 10-0898061호는 하이브리드 터널 스캐닝장치를 개시하고 있으며, 레이저와 영상을 동시에 포함하고, 레이저 스캐닝 데이터로부터 실시간으로 데이터의 내용을 분석처리하고, 터널내의 이상부(라이닝 손상부 및 시설물)를 검측하고, 해당위치의 좌표값을 도출하면, 상기 좌표값을 바탕으로 해당위치에 국부적인 영상을 촬영 및 데이터를 획득하여 보다 정확하고 효율적인 스캐닝이 가능한 하이브리드 터널 스캐닝 장치를 제공하고 있다.In addition, Korean Patent Registration No. 10-0898061 according to the prior art discloses a hybrid tunnel scanning device, which includes a laser and an image at the same time, and analyzes the contents of the data in real time from the laser scanning data, Lining damage and facilities), and derive the coordinate values of the corresponding location, based on the coordinate value, the hybrid tunnel scanning device capable of more accurate and efficient scanning by taking a local image and data acquired Providing.
도 1은 종래기술에 따른 하이브리드 터널 스캐너에 의한 영상데이터 획득과정의 순서도로서, 하이브리드 터널 스캐닝 시스템은 레이저 스캐너, 영상취득장치, 영상 취득장치 구동부 및 자주식 대차로 구성되며, 상기 레이저 스캐너는 터널의 라이닝 및 시설물 등 터널내부에 대한 스캐닝을 일차적으로 수행하기 위한 것으로서 자주식 대차의 이동방향 전방부에 장착된다.1 is a flow chart of the image data acquisition process by a hybrid tunnel scanner according to the prior art, the hybrid tunnel scanning system is composed of a laser scanner, an image acquisition device, an image acquisition device driver and a self-propelled bogie, the laser scanner lining the tunnel And it is mounted to the front of the moving direction of the self-propelled bogie as primarily for performing the scanning of the inside of the tunnel, such as facilities.
이와 같이 장착된 하이브리드 터널스캐너는 도 1에 도시된 바와 같이, 자주식 대차가 터널을 축방향으로 이동하면서 레이저 스캐너에 의해 검출된 측정데이터는 레이저 스캐너 제어부로 전송되고, 상기 레이저 스캐너 제어부는 획득된 측정데이터를 통해 촬영개소 특성 및 좌표를 추출하고, 이상부 또는 추가관찰 요부를 판별하여 이에 대한 좌표값을 영상 취득장치 구동 제어부로 전송한다. 상기 영상 취득장치 구동제어부는 레이저 스캐너 제어부를 통해 받은 좌표값을 영상 취득장치로 전달하고, 영상 취득장치는 이에 대한 좌표를 영상촬영을 하고 영상데이터를 획득하고, 영상 취득장치 제어부는 국부영상을 획득한다.As shown in FIG. 1, in the hybrid tunnel scanner mounted as described above, measurement data detected by the laser scanner is transmitted to the laser scanner controller while the self-propelled bogie moves the tunnel in the axial direction, and the laser scanner controller acquires the measured measurement. The characteristics and coordinates of the photographing location are extracted from the data, the abnormalities or the additional observation points are determined, and the coordinate values are transmitted to the image acquisition apparatus driving control unit. The image acquisition device driving control unit transfers the coordinate values received through the laser scanner control unit to the image acquisition device, the image acquisition device captures the coordinates thereof and acquires the image data, and the image acquisition device control unit acquires the local image. do.
또한, 레이저 스캐너에 의해 측정된 데이터는 레이저 스캐너 제어부에 의해 가상공학을 위한 시설물 관리에 사용되고, 상기 영상 취득장치 제어부를 통해 이미지 처리 및 분석을 하여 종합터널 유지 관리 시스템으로 구현된다.In addition, the data measured by the laser scanner is used for facility management for virtual engineering by the laser scanner control unit, and the image processing and analysis through the image acquisition device control is implemented as a comprehensive tunnel maintenance system.
이와 같이 구성된 종래기술에 따른 레이저 스캐닝에 의하여 터널 내부를 일차적으로 스캐닝하고, 이에 따라 추출 데이터를 통해 결함부위 및 추가 촬영요부를 영상 촬영장치를 통해 촬영하여 영상 데이터를 획득함으로써, 보다 빠르고 정확한 터널 내의 스캐닝이 가능하고, 레이저 스캐닝과 영상 스캐닝의 접목으로 영상이 3차원 좌표값을 가질 수 있어 다양한 표현이 가능하여 종합 터널유지관리 시스템으로 구현될 수 있는 하이브리드 터널 스캐닝 장치를 제공하는 효과를 갖는다.By scanning the inside of the tunnel by laser scanning according to the prior art configured as described above, accordingly, the defect portion and the additional photographing part are captured by the image capturing device through the image capturing apparatus, thereby obtaining image data, thereby enabling faster and more accurate in the tunnel. Scanning is possible, and the image can have a three-dimensional coordinate value by combining laser scanning and image scanning, and thus various expressions can be provided, thereby providing a hybrid tunnel scanning apparatus that can be implemented as a comprehensive tunnel maintenance system.
그러나, 종래기술에 따른 하이브리드 터널 스캐닝장치는 1차로 레이저 스캐닝한 후 2차로 영상 스캐닝을 하여 각각의 획득된 스캐닝 데이터에 의해 주로 터널 벽면의 구조물의 변형 또는 크랙등의 결함을 진단할 수 있을 뿐, 전차선이나, 궤도의 상태를 진단하는데 어려움이 있는 문제점이 있었다.However, the hybrid tunnel scanning apparatus according to the related art can only diagnose defects such as deformation or cracks in the structure of the tunnel wall mainly by scanning data obtained by performing laser scanning first and second image scanning. There was a problem in diagnosing a state of a tram line or track.
또한, 종래기술에 따른 영상 스캐닝장치에 의해 차량의 전차선 또는 궤도를 촬영할 경우 전차선 영상은 판타그라프와의 접촉에 의해 마모된 상태이므로 다른 영역보다 빛의 반사정도가 심하여 정확한 영상을 획득하는데 어려움이 있으며, 궤도영상 또한 궤도바퀴와의 마찰로 인해 다른 영역의 반사광과 달라 정확한 영상을 획득하지 못하는 문제점이 있었다.In addition, when photographing the tramline or track of the vehicle by the image scanning apparatus according to the prior art, since the tramline image is worn out by contact with the fantagraph, it is difficult to obtain an accurate image because the degree of light reflection is greater than that of other areas. Also, due to the friction with the track wheel, the track image may not be able to obtain an accurate image unlike the reflected light in other areas.
따라서, 본 발명은 궤도차량에 장착된 터널구조물 감시용 카메라, 전차선감시용 카메라 및 궤도감시용 카메라를 통해 획득된 영상을 저장하고, 서버부로 전송하여 이를 저장 및 상황실 단말기로 전송하여 원격으로 각 시설물을 검색 및 점검하도록 하는 궤도차량을 이용한 철도시설물 점검시스템을 제공하는데 그 목적이 있다.Therefore, the present invention stores the images obtained through the tunnel structure monitoring camera, the tramline monitoring camera and the track monitoring camera mounted on the tracked vehicle, and transmits to the server unit to store and transmit them to the terminal room terminal remotely to each facility The purpose of the present invention is to provide a railroad facility inspection system using tracked vehicles to search and inspect the vehicle.
본 발명의 다른 목적은 궤도차량에 소음/진동정보 수집장치를 장착하여 상기 영상정보와 함께 서버부로 전송하여 영상뿐만 아니라, 궤도차량의 승차감 분석을 위한 궤도차량의 진동, 소음 및 기울기센서를 통해 획득된 정보를 제공하도록 하는데 있다.Another object of the present invention is equipped with a noise / vibration information collecting device on the track vehicle and transmitted to the server unit along with the image information, and obtained through the vibration, noise and tilt sensor of the track vehicle for analyzing the riding comfort of the track vehicle as well as the image. To provide the corrected information.
본 발명의 다른 목적은 한대의 궤도차량에 장착된 터널구조물 감시용 카메라, 전차선감시용 카메라, 궤도 감시용카메라 뿐만 아니라, 궤도차량의 진동, 소음 및 기울기 센서를 통해 각 터널구조물, 전차선 및 궤도의 영상정보 및 궤도차량의 진동, 소음 및 기울기 데이터를 동시에 획득이 가능할 뿐만 아니라, 상기 영상정보 및 궤도차량 진동,소음 및 기울기 데이터를 위치정보산출에 의한 위치정보에 동기시켜 저장 및 제공하도록 하는데 그 목적이 있다.Another object of the present invention is to provide a tunnel structure monitoring camera, a catenary surveillance camera, a track monitoring camera mounted on a single track vehicle, as well as a track, vibration and noise sensor of each track structure, tram line and track. It is not only possible to acquire image information and vibration, noise and tilt data of a track vehicle at the same time, but also to store and provide the image information and track vehicle vibration, noise and tilt data in synchronization with the position information by position information calculation. There is this.
본 발명의 다른 목적은 획득된 각 카메라의 영상과 진동센서 및 소음센서로부터 획득 진동/소음데이터가 동일한 위치에서 설정된 기준값 이상의 신호가 추출될 경우 결함위치로 판단하여 경보하도록 하는데 그 목적이 있다.Another object of the present invention is to determine that the image is obtained from the vibration sensor and the noise sensor and the vibration / noise data obtained from the same position more than the reference value set in the same position to determine the alarm position and alert.
본 발명에 따른 궤도차량을 이용한 철도시설물 점검시스템은 궤도차량에 센서부 및 감시카메라부를 장착하고 이동하면서 정보를 획득하는 정보획득장치와, 상기 정보획득장치에서 무선전송된 데이터를 데이터베이스에 저장하고, 상황실단말기로 전송하여 궤도차량 이동중 획득된 데이터를 검색, 편집 및 진단하도록 하는 서버부로 구성된 궤도차량을 이용한 철도시설물 점검시스템에 있어서, 상기 정보획득장치는 상기 감시카메라부의 셔터에 동기되어 구동하는 조명부; 상기 궤도차량의 진동 및 소음 정보를 획득하는 센서부; 상기 궤도차량의 운행 위치정보를 카운트하여 제공하는 위치정보산출부; 및 상기 조명부를 구동제어하고, 상기 감시카메라부로부터 획득된 영상정보와 상기 센서부로부터 획득된 진동 및 소음정보와, 상기 위치정보산출부를 통해 획득된 위치정보를 상기 서버부로 무선전송하는 제어부;로 구성되고, 상기 서버부는 상기 정보획득장치로부터 전송된 영상정보를 소음,진동데이터와 함께 거리정보에 동기시켜 상기 데이터베이스에 저장하는 영상저장서버; 상기 데이터베이스에 저장된 영상을 검색하고 편집하는 영상검색서버; 상기 데이터베이스에 저장된 데이터에 대한 메타정보를 관리하고, 상기 상황실 단말기가 검색 및 편집 가능하도록 하는 파일서버; 및 상기 데이터베이스에 저장된 영상데이터에 대한 데이터베이스 관리를 위한 DB관리서버;를 포함하여 구성된 것을 특징으로 한다.The railroad facility inspection system using a track vehicle according to the present invention includes an information acquisition device for acquiring information while mounting and moving a sensor unit and a surveillance camera unit on a track vehicle, and storing data wirelessly transmitted from the information acquisition device in a database. A railway facility inspection system using a track vehicle comprising a server unit for transmitting to a situation room terminal for searching, editing, and diagnosing data obtained while moving a track vehicle, the information acquisition device comprising: an illumination unit driven in synchronization with a shutter of the surveillance camera unit; A sensor unit for obtaining vibration and noise information of the tracked vehicle; A location information calculation unit for counting and providing driving location information of the track vehicle; And a controller configured to control driving of the lighting unit, and to wirelessly transmit the image information obtained from the surveillance camera unit, the vibration and noise information obtained from the sensor unit, and the position information obtained through the location information calculator to the server unit. The server unit comprises: an image storage server configured to store image information transmitted from the information acquisition device in the database in synchronization with distance information together with noise and vibration data; An image search server for searching and editing images stored in the database; A file server that manages meta information on data stored in the database and enables the situation room terminal to search and edit the data; And a DB management server for managing a database of the image data stored in the database.
본 발명의 다른 목적을 달성하기 위한 궤도차량을 이용한 철도시설물 정보획득과정은 궤도차량에 다수의 감시카메라로 구성된 카메라부, 조명부, 센서부, 위치정보산출부를 포함한 정보획득장치를 장착하고 이동하면서 획득된 각 영상데이터, 소음 및 진동데이터, 위치정보를 서버부로 전송하여 철도시설물을 점검하도록 하는 궤도차량을 이용한 철도시설물 감시방법에 있어서, 상기 정보획득장치에 의해 각 감시카메라에서 촬영한 각 영상과, 상기 센서부에서 획득된 소음 및 진동데이터와, 상기 위치정보산출부로부터의 거리정보를 획득하여 상기 서버부로 전송하여 데이터베이스에 저장하는 제1단계; 상기 서버부는 데이터베이스에 저장된 각 영상, 소음 및 진동데이터를 상기 위치정보에 동기시켜 상기 각 영상, 소음 및 진동데이터의 획득 위치를 산출하는 제2단계; 및 상기 데이터베이스에 위치정보에 동기되어 저장된 각 영상,소음 및 진동데이터를 상황실단말기로 전송하여 디스플레이하는 제3단계;를 포함하여 이루어진 것을 특징으로 한다.Railroad facility information acquisition process using a tracked vehicle to achieve another object of the present invention is obtained by mounting and moving the information acquisition device including a camera unit, a lighting unit, a sensor unit, a location information calculation unit consisting of a plurality of surveillance cameras on the tracked vehicle. In the railroad facility monitoring method using a tracked vehicle to transmit the respective image data, noise and vibration data, and location information to the server unit to check the railroad facility, each image photographed by each surveillance camera by the information acquisition device, A first step of acquiring the noise and vibration data acquired by the sensor unit and the distance information from the position information calculating unit and transmitting the noise and vibration data to the server unit to store in a database; A second step of calculating, by the server unit, an acquisition position of each image, noise and vibration data by synchronizing each image, noise and vibration data stored in a database with the position information; And a third step of transmitting each image, noise, and vibration data stored in synchronization with the location information in the database to the situation terminal.
여기서, 상기 정보획득장치를 통해 궤도차량에 장착된 소음 및 진동센서로부터 획득된 소음 및 진동데이터를 수집한 후, 상기 위치정보에 동기시켜 상기 소음 및 진동데이터의 획득 위치를 산출하는 단계; 및 상기 영상, 소음 및 진동데이터가 설정된 기준값 이상이 획득될 경우 결함구간으로 판단하는 단계;를 더 포함하여 이루어진 것을 특징으로 한다.Here, after collecting the noise and vibration data obtained from the noise and vibration sensor mounted on the track vehicle through the information acquisition device, calculating the acquisition position of the noise and vibration data in synchronization with the position information; And determining that the image, noise, and vibration data are determined as a defect section when a predetermined reference value or more is obtained.
본 발명에 따른 궤도차량을 이용한 철도시설물 점검시스템은 한대의 궤도 차량에 장착된 터널구조물 감시카메라, 전차선 감시카메라 및 궤도 감시카메라를 통해 각각 획득된 별도의 구체적인 영상을 저장하고, 서버부로 전송하여 이를 저장하여 상황실단말기로 전송하므로, 터널구조물, 전차선 및 궤도를 원격으로 점검 및 분석할 수 있는 효과가 있다.The railroad facility inspection system using the track vehicle according to the present invention stores the separate specific images obtained through the tunnel structure monitoring camera, the tramline monitoring camera and the track monitoring camera mounted on one tracked vehicle, and transmits them to the server unit. Since it is stored and sent to the situation terminal, tunnel structures, tram lines and tracks can be checked and analyzed remotely.
또한 본 발명은 궤도차량에 소음/진동, 기울기 정보 수집센서를 통해 수집된 각 정보에 의해 차량의 승차감을 분석할 수 있는 효과가 있다.In addition, the present invention has the effect that can analyze the riding comfort of the vehicle by the information collected through the noise / vibration, tilt information collection sensor to the tracked vehicle.
또한, 철도 시설물의 각 영상 및 승차감 분석을 위한 각 센서 데이터를 동시에 획득이 가능할 뿐만 아니라, 위치정보산출부의 거리정보에 동기시켜 저장 및 제공하므로 획득된 영상정보 및 각 센서데이터의 실제 위치를 쉽게 판별할 수 있는 효과가 있다.In addition, it is possible not only to simultaneously acquire each image of the railroad facilities and each sensor data for the passenger comfort analysis, but also store and provide them in synchronization with the distance information of the location information calculation unit, thereby easily determining the acquired image information and the actual position of each sensor data. It can work.
도 1은 종래기술에 따른 하이브리드 터널 스캐닝장치의 동작 순서도이고,1 is an operation flowchart of a hybrid tunnel scanning apparatus according to the prior art,
도 2는 본 발명의 실시예에 따른 궤도차량을 이용한 철도시설물 점검시스템의 전체 구성도이고,2 is an overall configuration diagram of a railway facility inspection system using a track vehicle according to an embodiment of the present invention,
도 3a, 3b는 본 발명의 다른 실시예에 따른 궤도차량을 이용한 철도시설물 점검시스템의 전체 구성도이고,Figure 3a, 3b is an overall configuration of the railroad facility inspection system using a tracked vehicle according to another embodiment of the present invention,
도 4, 도 5는 본 발명의 일 실시예에 따른 각 감시카메라를 탑재한 궤도차량의 정면 및 측면 예시도이고,4 and 5 are front and side views of the tracked vehicle equipped with each surveillance camera according to an embodiment of the present invention,
도 6a 내지 도 6c는 각 감시카메라를 통해 획득된 영상 및 소음/진동센서를 통해 수집된 영상의 실시예를 보인 도이고,6A to 6C are diagrams illustrating an embodiment of an image acquired through each surveillance camera and an image collected through a noise / vibration sensor.
도 7은 각 감시카메라를 통해 획득된 영상 및 소음/진동센서를 통해 수집된 영상 및 소음/진동 신호의 실시예를 보인 그래프이다.FIG. 7 is a graph illustrating an embodiment of an image and a noise / vibration signal collected through an image and a noise / vibration sensor acquired through each surveillance camera.
본 발명의 실시예에 따른 궤도차량을 이용한 철도시설물 점검시스템에 대하여 첨부된 도 2 내지 도 7을 참조하여 상세히 설명하면 다음과 같다.The railroad facility inspection system using the tracked vehicle according to the embodiment of the present invention will be described in detail with reference to FIGS. 2 to 7.
도 2는 본 발명의 실시예에 따른 궤도차량을 이용한 철도시설물 점검시스템의 블록 구성도로서, 궤도차량에 장착되어 철도시설물 영상 및 소음,진동데이터를 획득하는 정보획득장치(100)와, 상기 정보획득장치(100)로부터 영상,소음 및 진동데이터를 무선 전송받아 저장하고, 분석하기 위하여 상황실단말기(221)로 전송하는 서버부(200)로 구성된다.Figure 2 is a block diagram of a railroad facility inspection system using a tracked vehicle according to an embodiment of the present invention, the information acquisition device 100 is mounted on the tracked vehicle to obtain the railroad facility image and noise, vibration data and the information It is composed of a server unit 200 for transmitting the image, noise and vibration data from the acquisition apparatus 100 to the situation room terminal 221 to receive, store and analyze the radio transmission.
상기 정보획득장치(100)는 궤도차량에 장착되어 운행 중인 철도시설물의 획득하는 카메라부(111)와, 상기 카메라부(111)의 셔터에 동기되어 구동하는 조명부(112)와, 상기 궤도차량의 진동 및 소음 정보를 획득하는 센서부(190)와, 상기 궤도차량의 운행 위치정보를 카운트하여 제공하는 타코메타(186)와, 상기 조명부(112)를 구동제어하고, 상기 카메라부로부터 획득된 영상정보와 상기 센서부로부터 획득된 진동 및 소음정보와, 상기 위치정보산출부를 통해 획득된 위치정보를 상기 서버부로 무선전송하는 제어부(170)로 구성된다.The information acquiring device 100 includes a camera unit 111 for acquiring railway facilities mounted on a track vehicle, an illumination unit 112 driven in synchronization with a shutter of the camera unit 111, and the track vehicle. Sensor unit 190 for acquiring vibration and noise information, tacommeter 186 for counting and providing driving position information of the tracked vehicle, and driving control of the lighting unit 112, and image information obtained from the camera unit. And a controller 170 for wirelessly transmitting the vibration and noise information obtained from the sensor unit and the position information obtained through the position information calculation unit to the server unit.
상기 서버부(200)는 상기 정보획득장치(100)로부터 전송된 영상정보를 소음,진동데이터와 함께 위치정보에 동기시켜 상기 데이터베이스(210)에 저장하는 영상저장서버(212)와, 상기 데이터베이스(210)에 저장된 영상을 검색하고 편집하는 영상검색서버(213)와, 상기 데이터베이스(210)에 저장된 데이터에 대한 메타정보를 관리하고, 상기 상황실단말기(221)가 검색 및 편집 가능하도록 하는 파일서버(214)와, 상기 데이터베이스(210)에 저장된 영상, 소음, 진동 데이터에 대한 데이터베이스 관리를 위한 DB관리서버(211)로 구성된다.The server unit 200 stores the image information transmitted from the information acquisition device 100 in the database 210 in synchronization with the location information along with the noise and vibration data, and the database ( Image search server 213 for searching and editing the image stored in the 210, and the file server for managing the meta information about the data stored in the database 210, the situation terminal 221 to search and edit ( 214 and a DB management server 211 for database management for the image, noise, vibration data stored in the database 210.
도 3a는 본 발명의 다른 실시예에 따른 궤도차량을 이용한 철도시설물 점검시스템의 블록 구성도로서, 정보획득장치(100)는 궤도차량의 전면의 좌, 우측에 장착되어 터널의 좌, 우측 환경 감시 영상을 획득하는 좌, 우측 구조물 영상획득장치(110)(120)와, 궤도차량의 전면 좌, 우측에 각각 장착되어 좌, 우측 궤도의 영상을 획득하는 좌, 우측 궤도영상 획득장치(130)(140)와, 전차선의 좌, 우측 영상을 각각 획득하는 좌, 우측 전차선 영상획득장치(150)(160)와, 궤도차량의 실내에 장착되어 주행 중 차량의 소음, 진동 및 기울기 데이터를 각각 획득하는 소음센서(191), 진동센서(192) 및 기울기센서(193)와, 상기 궤도차량 운행시 위치정보를 획득하는 위치정보산출부(180)과, 상기 각 센서(191~193) 및 위치정보산출부(180)로부터 각 데이터를 수집하는 데이터수집부(173)와, 상기 데이터수집부(173)로부터 각 데이터를 입력받고, 상기 위치정보산출부(180)의 위치정보에 맞게 각 수집 데이터를 동기시켜 저장하는 차량정보저장부(171)(172)로 구성된다.Figure 3a is a block diagram of a railroad facility inspection system using a track vehicle according to another embodiment of the present invention, the information acquisition device 100 is mounted on the left and right of the front of the track vehicle to monitor the left and right environment of the tunnel Left and right structure image acquisition devices 110 and 120 for acquiring an image, and left and right track image acquisition devices 130 mounted on the front left and right sides of a tracked vehicle, respectively, to acquire images of left and right tracks. 140 and left and right tramline image acquisition devices 150 and 160 for acquiring left and right images of a tramline, respectively, and are mounted inside a tracked vehicle to acquire noise, vibration and tilt data of a vehicle while driving. Noise sensor 191, vibration sensor 192 and inclination sensor 193, location information calculation unit 180 for obtaining location information when the track vehicle is running, and each of the sensors 191 to 193 and location information calculation A data collector 173 for collecting each data from the unit 180; Group receives the respective data from the data acquisition unit 173, the location information is composed of location information the vehicle information storage unit 171 (172) for storing in synchronism with each of the acquired data according to the calculation section 180. The
여기서, 상기 위치정보산출부(180)는 바퀴(105)의 의 회전수를 측정하는 타코메타 또는 궤도차량의 주행 가속도를 측정하는 가속도센서로 구성된다.Here, the position information calculation unit 180 is composed of a tachometer for measuring the number of revolutions of the wheel 105 or an acceleration sensor for measuring the driving acceleration of the tracked vehicle.
또한, 상기 차량의 정보획득장치(100)의 구체적인 구성에 대하여 도 4, 5를 참조하여 보다 상세히 설명하면 다음과 같다.In addition, a detailed configuration of the information acquisition apparatus 100 of the vehicle will be described in detail with reference to FIGS. 4 and 5 as follows.
상기 좌, 우측 구조물영상 획득장치(110)(120)는 구조물의 영상을 획득하는 각각의 구조물 감시카메라(111)(121)와, 상기 구조물 감시카메라(111)(121)의 셔터스피드에 맞춰 조명을 조사하는 좌, 우 구조물조명(112)(122)와, 상기 감시카메라(111)(121)의 셔터스피드에 상기 각 구조물 조명(112)(122)을 동기 구동시키는 구조물조명제어부(113)로 구성된다.The left and right structure image obtaining apparatuses 110 and 120 illuminate according to the shutter speeds of the structure monitoring cameras 111 and 121 and the structure monitoring cameras 111 and 121 for acquiring an image of the structure. Left and right structure lighting (112, 122) for irradiating the structure and the lighting control unit 113 for synchronously driving each of the structure lighting (112, 122) to the shutter speed of the monitoring camera (111, 121). It is composed.
상기 좌, 우측 궤도 영상획득장치(130)(140)는 궤도차량의 전면 좌, 우측에 장착되어, 좌, 우측 궤도(101)(102)의 영상을 획득하는 좌, 우측 궤도 감시카메라(131)(141)와, 상기 각 궤도 감시카메라(131)(141)의 셔터 스피드에 맞춰 조명을 조사하는 각각의 궤도조명(132)(142)과, 상기 궤도조명(132)(142)을 상기 각 궤도 감시카메라(131)(141)의 셔터 스피드에 동기되어 구동하도록 제어하는 궤도조명 제어부(133)로 구성된다.The left and right track image acquisition devices 130 and 140 are mounted on the front left and right sides of the tracked vehicle, and the left and right track track cameras 131 which acquire images of the left and right tracks 101 and 102. 141, each of the track lights 132 and 142 that irradiate lights according to the shutter speeds of the track cameras 131 and 141, and the track lights 132 and 142 of the tracks. It consists of a track lighting control unit 133 for controlling to drive in synchronization with the shutter speed of the monitoring cameras (131, 141).
상기 좌, 우측 전차선 영상획득장치(150)(160)는 궤도차량의 상부 판타그라프(103)가 설치된 궤도차량의 지붕면 좌, 우측에 전차선(104)의 영상을 각각 획득하는 좌, 우측 전차선 감시카메라(151)(152)와, 상기 전차선 감시카메라(151)(161)가 명확한 영상을 획득하도록 조명을 조사하는 각각의 전차선조명(152)(162)과, 상기 전차선조명(152)(162)을 상기 각 전차선 감시카메라(151)(161)의 셔터 스피드에 동기되어 구동하도록 제어하는 전차선조명 제어부(153)로 구성된다.The left and right tramline image acquisition devices 150 and 160 monitor left and right tramline which acquires images of the tramline 104 on the left and right sides of the roof of the tracked vehicle on which the upper pantagraph 103 of the tracked vehicle is installed. Camera 151, 152, each of the tramline lights 152 and 162 that illuminates the tramline surveillance cameras 151 and 161 to obtain a clear image, and the tramline lights 152 and 162. It is composed of a catenary light control unit 153 for controlling to drive in synchronization with the shutter speed of each of the catenary cameras (151, 161).
상기 서버부(200)는 상기 정보획득장치(100)에서 획득 저장된 차량 정보를 무선인터넷 또는 근거리 무선통신망을 통해 전송받아 저장하는 데이터베이스(210)와, 상기 데이터베이스(210)에 저장된 각 데이터에 대하여 데이터베이스를 구축 관리하는 DB서버(211)와, 상기 데이터베이스(210)의 영상 및 승차감 분석데이터를 저장하는 영상저장서버(212)와, 상기 데이터베이스(210)의 영상, 승차감 분석데이터를 검색하는 영상검색서버(123)와, 상기 데이터베이스(210)에 저장된 데이터에 대한 메타정보를 관리하고, 상기 상황실단말기(221)가 검색 및 편집 가능하도록 하는 파일서버(124)로 구성된다. The server unit 200 is a database 210 for receiving and storing the vehicle information obtained by the information acquisition device 100 via a wireless Internet or a local area wireless communication network, and a database for each data stored in the database 210. DB server 211 for establishing and managing the image, image storage server 212 for storing the image and the ride comfort analysis data of the database 210, image search server for searching the image, ride comfort analysis data of the database 210 123 and a file server 124 that manages meta information about data stored in the database 210 and enables the situation terminal 221 to be searchable and editable.
이와 같이 구성된 본 발명에 따른 궤도차량을 이용한 철도시설물 점검시스템의 작용에 대하여 상세히 설명하면 다음과 같다.Referring to the operation of the railway facility inspection system using the tracked vehicle according to the present invention configured as described above in detail as follows.
먼저, 본 발명은 전철, 지하철 또는 기차 등 궤도를 이용한 궤도차량이 운행되는데 있어서, 전방 및 주변 환경 영상, 궤도영상과 전원을 공급받는 전차선 영상을 획득하고, 승차감을 분석하기 위한 차량의 진동, 소음 및 기울기를 감지한 데이터를 획득하여 저장한다.First, in the present invention, when the track vehicle using the track, such as a train, subway or train, the front and surrounding environment image, the track image and the tram line image supplied with power, the vehicle vibration, noise for analyzing the riding comfort And acquire and store data of the detected tilt.
도 4, 5는 본 발명의 실시예에 따른 궤도차량의 전면과 상부에 장착되어 영상획득을 위한 감시카메라 및 조명장치의 장착도로서, 궤도차량의 전면 좌, 우측 중앙높이에 2대의 구조물 감시카메라(111)(121)와 각각의 구조물조명(112)(122)을 장착하고, 궤도차량을 운행하면서, 궤도차량 전방 주변환경의 영상을 획득한다.4 and 5 are mounted on the front and top of the track vehicle according to an embodiment of the present invention is a mounting view of the surveillance camera and lighting device for image acquisition, two structure surveillance cameras on the front left and right center height of the track vehicle Mounting the 111 and 121 and each of the structure lights 112 and 122, while driving the track vehicle, to obtain an image of the surrounding environment in front of the track vehicle.
여기서, 상기 좌측 또는 우측 구조물 감시카메라(111)(121) 중 하나의 감시카메라에서 획득된 전방 영상은 무선랜 또는 와이브로 네트워크를 통해 실시간으로 서버부(200)로 전송하여 상황실 모니터로 디스플레이 함으로 실시간 감시가 이루어지도록 한다.Here, the front image obtained from the surveillance camera of one of the left or right structure surveillance cameras 111 and 121 is transmitted to the server unit 200 in real time through a wireless LAN or a WiBro network and displayed on the situation room monitor for real-time monitoring. To be done.
상기 실시간 전방 영상획득 및 전송을 위한 다른 실시예로 상기 각 영상획득장치(110~160) 외에 궤도차량의 전면 또는 후면 일측에 별도의 동영상 카메라를 장착하여 획득된 구조물 동영상을 와이브로 네트워크를 통하여 상황실에 전송하므로, 원격으로 차량 운행중 실시간으로 감시하도록 한다.As another embodiment for the real-time front image acquisition and transmission, in addition to the respective image acquisition apparatuses 110 to 160, a structure video obtained by installing a separate video camera on one side of the front or rear side of the tracked vehicle is transferred to the operation room through the WiBro network. It transmits remotely, so that the vehicle can be monitored in real time while driving.
도 6a는 구조물 감시카메라(111)(121)에 의해 획득된 영상의 일실시예로서, 터널의 정면 환경, 벽면, 천정, 전차선, 궤도를 포함한 전체적인 전면 영상을 획득하여 상기 차량정보저장부(171)에 저장한다.FIG. 6A illustrates an image obtained by the structure surveillance cameras 111 and 121. The vehicle information storage unit 171 may be obtained by obtaining an entire front image including a front environment of a tunnel, a wall, a ceiling, a tramline, and a track. ).
상기 구조물 조명제어부(113)는 고속운행 중 선명한 촬영영상을 획득하기 위한 고속 셔터 스피드 촬영시 셔터 스피드에 맞춰 조명을 제어하며, 중점관리 포인트의 감시를 위한 최상의 촬영 위치 선정 및 촬영각도를 선정한다. 지하터널 구간은 조명이 없어 어둡기 때문에 고속 카메라 영상확보를 위한 충분한 조명 밝기를 확보해야 하며, 이를 위해 조명 투사방법, 사용 조명의 종류 또는 투사각도 등에 따라 달라지므로, 최적의 영상을 얻기 위해 적절히 선택 및 조절하여야 한다.The structure lighting control unit 113 controls the lighting according to the shutter speed during high-speed shutter speed shooting to obtain a clear shot image during high-speed operation, and selects the best shooting position and the shooting angle for monitoring the key point. The underground tunnel section is dark because there is no lighting, so it is necessary to secure enough lighting brightness for high-speed camera image acquisition.It depends on the lighting projection method, the type of lighting used, or the angle of projection. It should be adjusted.
또한, 상기 각 감시카메라(111)(121)는 터널 상부 및 좌우 부분의 선명한 영상을 확보하기 위하여 카메라 테스트를 통해 각도를 조절 설정해야하며, 먼거리 전면의 촬영을 위해 충분한 밝기의 조명이 제공되어야 한다.In addition, each of the surveillance cameras 111 and 121 should be set to adjust the angle through the camera test in order to ensure a clear image of the upper and left and right portions of the tunnel, and the illumination of sufficient brightness for shooting in the far distance must be provided. .
도 6b는 궤도 감시카메라(131)(141)에 의해 획득된 영상의 일 실시예로서, 상기 궤도차량의 전면 하단부 좌, 우측에 2대의 궤도 감시카메라(131)(141) 및 각각의 궤도조명(132)(142)을 장착하여 좌, 우측 궤도(101)(102) 영상을 획득한다.FIG. 6B illustrates an image obtained by the track monitoring cameras 131 and 141, and two track monitoring cameras 131 and 141 and respective track lightings to the left and right of the front lower end of the track vehicle. 132 and 142 are mounted to acquire left and right track 101 and 102 images.
이때, 좌, 우측 궤도(101)(102)의 고정핀, 궤도 받침대 등의 선명한 영상을 획득하도록 조명 및 카메라 각도를 적절히 조절해야 한다. 상기 궤도 감시 영상은 도 6a의 구조물 영상과 같이 원거리 영상이 아니라, 중간거리 영상을 획득하도록 카메라의 촬영각도 및 초점 등을 조절한다.At this time, the lighting and the camera angle should be appropriately adjusted so as to obtain a clear image of the fixing pins, track pedestals, etc. of the left and right tracks 101 and 102. The trajectory monitoring image adjusts the photographing angle and the focus of the camera to obtain the intermediate distance image, not the far image as in the structure image of FIG. 6A.
도 6c는 전차선 감시카메라(151)(161)에 의해 획득된 전차선 영상의 일 실시예로, 판다그라프(103)의 주변 좌, 우 일측에 장착된 전차선 감시카메라(151)(161) 및 각각의 전차선조명(152)(162)의 구동에 의해 전차선의 좌, 우측 영상을 획득한다.FIG. 6C illustrates an example of a tramline image obtained by the tramline surveillance cameras 151 and 161. The tramline surveillance cameras 151 and 161 mounted on one side of the left and right sides of the panda graph 103 and each of The left and right images of the tramline are acquired by driving the tramline lights 152 and 162.
상기 전차선 감시카메라(151)(161)은 전차선(104)의 전원공급선 및 애자부분과, 애자클립 및 볼트 감시를 위한 선명한 영상을 획득해야 하며, 상기 전차선 감시카메라(151)(161)은 궤도차량의 지붕면에 설치되어 전차선(104)를 촬영해야 하므로 카메라 초점 및 조명을 가까운 거리 촬영에 맞도록 조절해야 한다.The tramline surveillance cameras 151 and 161 should acquire a clear image for monitoring the power supply line and insulator portion of the tramline 104, insulator clips and bolts, and the tramline surveillance cameras 151 and 161 are tracked vehicles. Since it is installed on the roof surface of the tram line 104 to be photographed, the camera focus and lighting must be adjusted for close range shooting.
상기 각 감시카메라(111~161)는 고속특수 촬상 방식 카메라를 사용하며 고속으로 운행중인 열차에서 실시간 영상을 얻어야 하는데, 선명한 영상확보를 위해 동영상 보다는 정지영상을 연속적으로 촬영해야 한다.Each of the surveillance cameras 111 to 161 uses a high-speed special imaging camera and must obtain a real-time image from a train operating at a high speed, and must continuously capture a still image rather than a video to obtain a clear image.
고속 이동하면서 촬영함으로 인한 화면 번짐현상을 방지하기 위해 첫째, 1/2000초 이상의 고속 셔터 스피드로 선명한 정지영상을 획득하도록 한다. 둘째, 충분한 광량의 조명이 필요하다. 즉, 밝은 조명이 필요하며, 플래쉬 방식의 조명이 상시 주사방식보다 밝음로 카메라의 셔터스피드에 동기되어 구동하는 플래쉬 방식의 조명으로 구성한다. 셋째, 궤도차량은 시속 90km에서 초당 25미터를 이동하는데, 카메라의 촬영앵글의 크기를 2m로 가정한다면 초당 13프레임 이상의 영상이 필요하다. 따라서 선명한 정지영상을 획득하기 위해서는 15FPS(Frame Per Second) 이상의 영상획득을 하게 된다.In order to prevent screen bleeding caused by shooting while moving at high speed, first, a clear still image is obtained at a high shutter speed of 1/2000 second or more. Second, a sufficient amount of light is required. In other words, bright lighting is required, and the flash type lighting is brighter than the regular scanning method, so that the flash type lighting is driven in synchronization with the shutter speed of the camera. Third, the tracked vehicle travels 25 meters per second at 90 km / h. Assuming the camera's shooting angle is 2 m, more than 13 frames per second are required. Therefore, in order to acquire a clear still image, an image acquisition of 15 FPS or more is obtained.
즉, 본 발명의 실시예에 따른 각 영상획득장치(110~160)의 각 조명 및 조명제어부(112)(113)(132)(133)(152)(153)는 1/2500sec 이상의 촬영 밝기를 보장해야 하며, 하드웨어 점멸식(Trigger) 동기화를 지원해야 하며, 100SPS(Spot Per Sec)를 지원해야 한다.That is, each of the illumination and lighting control unit 112, 113, 132, 133, 152, 153 of each image acquisition device (110 ~ 160) according to an embodiment of the present invention is the brightness of 1 / 2500sec or more It must be guaranteed, it must support hardware trigger synchronization, and it must support 100SPS (Spot Per Sec).
한편, 궤도차량의 좌석 하단 일측에 장착된 각 센서(191~193)로부터 획득된 각 감지 데이터를 상기 데이터수집부(173)를 통해 차량정보저장부(171)로 전송하여 저장하도록 한다.On the other hand, each sensor data obtained from the sensors 191 to 193 mounted on one side of the lower seat of the tracked vehicle is transmitted to the vehicle information storage unit 171 through the data collection unit 173 and stored.
이때, 상기 데이터수집부(173)는 상기 위치정보산출부(180)에 의해 환산된 거리 및 위치정보도 동시에 상기 차량정보저장부(171)(172)에 저장시킨다.In this case, the data collector 173 stores the distance and location information converted by the location information calculator 180 in the vehicle information storage unit 171 and 172 at the same time.
여기서, 위치정보산출부(180)는 차량의 바퀴(105) 일 측에 타코메타(186)를 장착하여 바퀴의 회전수에 따라 거리 및 위치정보로 환산하여 제공하도록 한다.Here, the position information calculation unit 180 is equipped with a tachometer 186 on one side of the wheel 105 of the vehicle to convert the distance information and position information according to the rotation speed of the wheel.
상기 위치정보산출부(180)의 다른 실시예는 자이로센서 등의 3축 가속도센서를 이용하여 측정된 차량의 주행 가속도를 거리와 위치정보로 환산하여 제공한다.Another embodiment of the position information calculation unit 180 provides the driving acceleration of the vehicle measured using a three-axis acceleration sensor such as a gyro sensor converted into distance and position information.
또한, 위치정보산출부(180)는 각 역에서 출발할 때 거리측정을 시작하고, 다음 정차역에 정차할 때 거리측정을 종료한다. 즉, 이를 각 역마다 반복함으로, 궤도차량의 각 역간 이동거리 및 위치정보를 산출하여 저장하게 된다.In addition, the location information calculation unit 180 starts the distance measurement when starting from each station, and ends the distance measurement when stopping at the next stop. That is, by repeating this for each station, the distance and position information between stations of the tracked vehicle are calculated and stored.
이를 위해, 궤도차량에 RF수신부(181)를 장착하고, RF수신부(181)는 각 역에 구비된 RF송신부(도면에 미도시)로부터의 RF신호가 수신됨에 따라 상기 위치정보산출부(180)의 측정위치를 초기화하여 재측정을 시작하도록 한다.To this end, the RF receiver 181 is mounted on the tracked vehicle, and the RF receiver 181 receives the RF signal from the RF transmitter (not shown) provided in each station, and thus the position information calculator 180. Reset the measuring position of to start the re-measurement.
상기 위치정보산출부(180)와 RF수신부(181)를 이용한 거리측정의 다른 실시예로, 상기 차량정보저장부(171)(172)에 각 역의 실제 위치좌표(위도,경도)정보를 저장하고, 각 역을 통과할 때마다 상기 RF수신부(181)로부터 RF신호를 수신하게 되어 현재 역의 실제 위치좌표정보를 인식한다. 상기 위치정보산출부(180)는 상기 인식된 실제 위치좌표정보를 기점으로 거리데이터를 재산출하므로, 보다 정확한 위치를 획득하게 된다.In another embodiment of the distance measurement using the position information calculation unit 180 and the RF receiver 181, the actual position coordinate (latitude and longitude) information of each station is stored in the vehicle information storage units 171 and 172. In addition, the RF signal is received from the RF receiver 181 whenever passing through each station to recognize the actual position coordinate information of the current station. The location information calculation unit 180 recalculates the distance data based on the recognized actual location coordinate information, thereby obtaining a more accurate location.
이와 같이 궤도차량의 위치정보는 상기 데이터수집부(173)에 전송 및 저장되고, 각 역 사이의 궤도차량의 이동시 위치정보와 상기 영상데이터에 동기시킴으로 각 영상데이터의 획득위치를 파악할 수 있도록 한다.In this way, the position information of the tracked vehicle is transmitted and stored in the data collection unit 173, and the position information of the tracked vehicle is synchronized with the image data when the tracked vehicle moves between stations, so that the position of acquiring each image data can be determined.
도 3b는 본 발명의 다른 실시예에 따른 위치정보산출부의 블록구성도로서, 상기 위치정보산출부(180)는 궤도차량의 바퀴(105)에 설치된 센서로부터 회전 펄스를 입력받아 속도를 검출하는 속도검출부(173)와, 상기 속도검출부에서 출력된 신호를 토대로 궤도차량의 운행거리를 산출하는 운행거리검출부(183)와, 상기 운행거리검출부(183)로부터 입력된 운행거리를 입력받고, 역간거리정보가 저장된 역간거리데이터베이스(184)로부터 입력된 역간거리 데이터를 토대로 궤도차량의 위치정보를 산출하여 상기 데이터수집부(173)로 출력하는 마이크로프로세서(185)로 구성된다.3B is a block diagram of a location information calculation unit according to another embodiment of the present invention, wherein the location information calculation unit 180 receives a rotation pulse from a sensor installed in a wheel 105 of a tracked vehicle to detect a speed thereof. The driving unit 173 receives a driving distance input from the driving distance detecting unit 183 and the driving distance detecting unit 183 that calculates the driving distance of the tracked vehicle based on the signal output from the speed detecting unit, and the reverse distance information. The microprocessor 185 calculates the position information of the tracked vehicle based on the reverse distance data input from the stored reverse distance database 184 and outputs the position information of the track vehicle to the data collection unit 173.
이와 같이 구성된 위치정보산출부(180)는 상기 속도검출부(173) 및 운행거리검출부(183)에 의해 바퀴(105)에 설치된 회전감지센서(도면에 미도시)로부터 입력된 회전수에 의해 속도 및 운행거리를 산출하게 된다.The position information calculation unit 180 configured as described above is configured to generate a speed and speed by the rotation speed input from the rotation detection sensor (not shown) installed on the wheel 105 by the speed detection unit 173 and the travel distance detection unit 183. Calculate the distance traveled.
상기 운행거리 검출부(183)에서 산출된 운행거리는 상기 마이크로프로세서(185)에서 역간거리데이터베이스(184)로부터 역간 거리정보를 입력받아 궤도차량이 출발할 때 다시 운행거리 및 위치정보를 산출하여 상기 데이터수집부(173)를 통해 상기 영상데이터와 함께 차량정보저장부(171)(172)에 저장한다.The travel distance calculated by the travel distance detection unit 183 receives the distance information between the stations from the station distance database 184 in the microprocessor 185 and calculates the distance and position information when the track vehicle starts again to collect the data. The image data is stored in the vehicle information storage units 171 and 172 through the unit 173.
상기, 차량정보저장부(171)(172)는 상기 위치정보산출부(180)으로부터 입력된 위치데이터에 상기 각 구조물, 궤도, 전차선 영상데이터 뿐만 아니라, 각 소음, 진동, 기울기 데이터(도면에 미도시)를 동기시켜 각 데이터의 위치를 파악할 수 있도록 한다.The vehicle information storage units 171 and 172 not only provide the structure, track, and tramline image data to the position data input from the position information calculation unit 180, but also the noise, vibration, and slope data (not shown in the drawing). Synchronize time) so that each data location can be identified.
상기 진동센서(193)의 일 실시예로 구성된 X,Y,Z축의 3축 가속도센서는 진동데이터 실시간으로 획득하여, 시간영역과 시간테이블과 매칭되는 선로현황 데이터 제공시 선로위치 영역으로 디스플레이 되도록 하며, 진동데이터 및 소음데이터는 실시간으로 주파수 영역에서 디스플레이 되도록 한다.The three-axis acceleration sensor of the X, Y, Z axis configured in one embodiment of the vibration sensor 193 is obtained by the vibration data in real time, so as to display in the track position area when providing the track status data matching the time domain and time table Vibration and noise data can be displayed in the frequency domain in real time.
상기 차량정보저장부(171)(172)는 획득 저장된 차량정보를 제어부(170)을 통해 서버부(200)로 무선전송하거나, 착탈식 저장장치로 구성하여 매일 또는 일정 주기로 차량에서 분리한 후, 상기 서버부(200)의 데이터베이스(210)로 직접 연결하여 저장하도록 한다.The vehicle information storage unit 171 and 172 wirelessly transmit the acquired and stored vehicle information to the server unit 200 through the control unit 170 or by configuring a removable storage device to separate from the vehicle every day or at regular intervals, and Direct connection to the database 210 of the server unit 200 to be stored.
또한, 상기 차량정보저장부(171)(172)는 구조물, 궤도, 전차선의 좌, 우 각 영상을 최소한 15FPS 이상의 정지영상을 획득해야 하므로 많은 양의 영상데이터를 저장하게 되므로 적어도 2개 이상의 차량정보저장부(171)(172)로 구성하여 실시간 영상 저장의 부하를 분산하도록 할 뿐만 아니라, 저장장치의 교체도 용이하도록 한다.In addition, the vehicle information storage unit 171, 172 is required to obtain a still image of at least 15 FPS for the left, right image of the structure, track, the tram line, so that a large amount of image data is stored at least two or more vehicle information The storage unit 171 and 172 may be configured to not only distribute the load of the real-time video storage but also to easily replace the storage device.
상기 서버부(200)는 각 궤도차량의 차량정보저장부(171)(172)로부터 전송된 영상을 데이터베이스(210)에 저장하고, 검색 및 편집할 수 있도록 고속 네트워크를 지원하고, 파일서버(214)를 통해 상황실 단말기(221)로 제공한다.The server unit 200 supports a high-speed network to store, search, and edit images transmitted from the vehicle information storage units 171 and 172 of each track vehicle in the database 210, and a file server 214. Provided to the situation room terminal 221 through.
여기서, 데이터베이스(210)는 대용량의 저장장치로, 최대 2GB/s의 읽기/쓰기 성능을 지원하도록 한다. 영상저장서버(212)는 궤도차량에서 획득된 영상을 상기 데이터베이스(210)에 저장하는 게이트웨이 서버기능을 제공한다. 상기 영상검색서버(213)는 상기 데이터베이스(210)에 저장된 영상을 검색하고 편집하는 기능을 수행하는 서버이고, 상기 파일서버(214)는 상기 데이터베이스(210)에서 저장하는 데이터에 대한 메타정보를 관리하며, 상황실 단말기(221)가 상기 데이터베이스(210)에 저장된 영상 데이터에 대한 검색이 가능하도록 하는 게이트웨이 기능을 수행하며, 상기 DB서버(211)는 상기 데이터베이스(210)에 저장된 영상 데이터에 대한 데이터베이스 관리를 수행한다.Here, the database 210 is a large storage device, and supports read / write performance of up to 2GB / s. The image storage server 212 provides a gateway server function for storing the image obtained from the tracked vehicle in the database 210. The image search server 213 is a server that performs a function of searching and editing an image stored in the database 210, and the file server 214 manages meta information about data stored in the database 210. And, the situation room terminal 221 performs a gateway function to enable the search for the image data stored in the database 210, the DB server 211 manages a database for the image data stored in the database 210 Perform
도 7은 각 감시카메라, 소음센서 및 진동센서를 통해 수집된 신호의 그래프 표시도로서, 이는 각 감시카메라(111~161), 소음센서 및 진동센서(191)(192)에 의해 수집된 데이터를 상기 서버부(200)를 통해 상황실단말기(221)에 표시한다.7 is a graph showing a signal collected through each surveillance camera, a noise sensor and a vibration sensor, which shows the data collected by each surveillance camera (111 ~ 161), noise sensor and vibration sensor (191) (192). The situation room terminal 221 is displayed through the server unit 200.
상기 상황실단말기(221)에서는 각 영상신호, 소음/진동신호를 모니터에 표시하고, 결함발생이 예상되는 영상 및 소음/진동신호를 추출하고, 결함발생 위치까지 산출하여 경보한다.The situation terminal 221 displays each video signal and noise / vibration signal on a monitor, extracts an image and noise / vibration signal that are expected to cause a defect, and calculates and alerts to a defect occurrence position.
보다 상세하게는, 상기 각 감시카메라(111~161)로부터 획득된 각 영상신호(CH01~CH06)는 고속촬영한 각 구조물, 궤도, 전차선 영상데이터는 각각 유사한 일련의 유사한 영상으로 이루어지는데, 각 영상의 평균값을 산출하여 기준영상으로 설정하고, 기준 영상신호에서 벗어날 경우 결함발생이 예상되는 영상으로 추출하게 된다.In more detail, each of the image signals CH01 to CH06 acquired from the surveillance cameras 111 to 161 are each composed of a series of similar images, each of which is a high-speed photographed structure, track, and tramline image data. The average value of is calculated and set as the reference image, and when it deviates from the reference image signal, it is extracted as an image that is expected to cause defects.
상기 추출된 결함발생 영상의 예상 위치는 상기 위치정보에 동기시키고, 위치정보에 의해 위치데이터를 산출하여, 결함발생이 예상되는 영상의 위치를 정확히 산출하게 된다.The expected position of the extracted defect occurrence image is synchronized with the position information, and the position data is calculated by the position information, thereby accurately calculating the position of the image where the defect occurrence is expected.
또한, 상기 소음, 진동센서(191)(192) 또는 기울기센서(193)으로부터 획득된 각 신호는 백색소음 및 차량자체 진동 등을 필터링한 소음 또는 진동데이터를 도 7의 CH08, CH09신호와 같이 추출하고, 추출된 소음 또는 진동데이터가 평균값으로 설정된 기준값보다 클 경우, 해당 위치에 결함이 발생된 것으로 판단한다.In addition, each signal obtained from the noise, the vibration sensor 191, 192 or the tilt sensor 193 is extracted with the noise or vibration data filtering the white noise and the vehicle's own vibration as shown in the CH08, CH09 signal of FIG. If the extracted noise or vibration data is larger than the reference value set as the average value, it is determined that a defect is generated at the corresponding position.
만약, 상기 소음 및 진동신호가 동일한 위치(A)에서 결함발생 신호가 추출될 경우에는 해당 위치에서 주요 결함이 발생된 것으로 판단하여 상기 상황실단말기(221)를 통해 경보한다.If a defect occurrence signal is extracted at the same position (A), the noise and vibration signals determine that a major defect has occurred at the corresponding position and alert through the situation terminal 221.
그리고, 상기에서 본 발명의 특정한 실시 예가 설명 및 도시되었지만 본 발명의 궤도차량을 이용한 철도시설물 점검시스템은 당업자에 의해 다양하게 변형되어 실시될 수 있음은 자명한 일이다.In addition, although specific embodiments of the present invention have been described and illustrated above, it is obvious that the railway facility inspection system using the track vehicle of the present invention may be variously modified and implemented by those skilled in the art.
그러나, 이와 같은 변형된 실시예들은 본 발명의 기술적 사상이나 범위로부터 개별적으로 이해되어져서는 안되며, 이와 같은 변형된 실시 예들은 본 발명의 첨부된 특허청구범위 내에 포함된다 해야 할 것이다.However, such modified embodiments should not be understood individually from the spirit or scope of the present invention, such modified embodiments will be included within the appended claims of the present invention.
Claims (14)
- 궤도차량에 센서부 및 감시카메라부를 장착하고 이동하면서 정보를 획득하는 정보획득장치와, 상기 정보획득장치에서 무선전송된 데이터를 데이터베이스에 저장하고, 상황실단말기로 전송하여 궤도차량 이동중 획득된 데이터를 검색, 편집 및 진단하도록 하는 서버부로 구성된 궤도차량을 이용한 철도시설물 점검시스템에 있어서,An information acquisition device for acquiring information while mounting and moving a sensor unit and a surveillance camera unit on the track vehicle, and storing the data wirelessly transmitted from the information acquisition unit in a database, and transmitting the data to a situation terminal to retrieve data acquired during the movement of the track vehicle. In the railroad facility inspection system using a track vehicle composed of a server unit for editing, editing and diagnosis,상기 정보획득장치는,The information acquisition device,상기 감시카메라부의 셔터에 동기되어 구동하는 조명부;An illumination unit driven in synchronization with the shutter of the surveillance camera unit;상기 궤도차량의 진동 및 소음 정보를 획득하는 센서부;A sensor unit for obtaining vibration and noise information of the tracked vehicle;상기 궤도차량의 운행 위치정보를 카운트하여 제공하는 위치정보산출부; 및A location information calculation unit for counting and providing driving location information of the track vehicle; And상기 조명부를 구동제어하고, 상기 감시카메라부로부터 획득된 영상정보와 상기 센서부로부터 획득된 진동 및 소음정보와, 상기 위치정보산출부를 통해 획득된 위치정보를 상기 서버부로 무선전송하는 제어부;로 구성되고,A control unit for driving control of the lighting unit, and wirelessly transmitting the image information obtained from the surveillance camera unit, the vibration and noise information obtained from the sensor unit, and the position information obtained through the position information calculating unit to the server unit. Become,상기 서버부는,The server unit,상기 정보획득장치로부터 전송된 영상정보를 소음,진동데이터와 함께 거리정보에 동기시켜 상기 데이터베이스에 저장하는 영상저장서버;An image storage server for storing the image information transmitted from the information acquisition device in the database in synchronization with distance information together with noise and vibration data;상기 데이터베이스에 저장된 영상을 검색하고 편집하는 영상검색서버;An image search server for searching and editing images stored in the database;상기 데이터베이스에 저장된 데이터에 대한 메타정보를 관리하고, 상기 상황실단말기가 검색 및 편집 가능하도록 하는 파일서버; 및A file server that manages meta information about data stored in the database, and enables the situation terminal to be searched and edited; And상기 데이터베이스에 저장된 영상데이터에 대한 데이터베이스 관리를 위한 DB관리서버;를 포함하여 구성된 것을 특징으로 하는 궤도차량을 이용한 철도시설물 점검시스템.And a DB management server for managing a database of the image data stored in the database.
- 제 1 항에 있어서, 상기 카메라부는,The method of claim 1, wherein the camera unit,상기 궤도차량의 전방 좌, 우측에 장착되어 전방 구조물 및 운행환경 영상을 획득하는 한 쌍의 구조물감시카메라;A pair of structure monitoring cameras mounted on the front left and right sides of the track vehicle to obtain images of the front structure and the driving environment;상기 궤도차량의 전면 하단 좌, 우측에 장착되어 궤도의 좌, 우 영상을 획득하는 한 쌍의 궤도감시카메라;A pair of track monitoring cameras mounted on the lower left and right sides of the front of the track vehicle to obtain left and right images of the track;상기 궤도차량의 상부 좌, 우측에 장착되어 구동전력을 공급받는 판타그라프와 접촉하는 전차선의 영상을 획득하는 한 쌍의 전차선감시카메라;를 포함하여 구성된 것을 특징으로 하는 궤도차량을 이용한 철도시설물 점검시스템.Railroad facility inspection system using a tracked vehicle, characterized in that it comprises a; a pair of frontline surveillance cameras are mounted on the upper left, right of the tracked vehicle to obtain an image of the front line in contact with the fantagraph supplied with driving power. .
- 제 2 항에 있어서,The method of claim 2,상기 정보획득장치의 각 감시카메라는 15FPS 내지 30FPS의 정지영상을 획득하는 것을 특징으로 하는 것을 특징으로 하는 궤도차량을 이용한 철도시설물 점검시스템.Each surveillance camera of the information acquisition device is a railway facility inspection system using a tracked vehicle, characterized in that to obtain a still image of 15FPS to 30FPS.
- 제 1 항에 있어서,The method of claim 1,상기 정보획득장치에 부가하여 동영상 네트워크 카메라를 차량의 전면 또는 후면 일측에 장착하여 획득된 동영상 데이터를 실시간으로 무선랜 또는 와이브로(Wibro) 네트워크를 통해 상황실단말기로 전송하는 것을 특징으로 하는 궤도차량을 이용한 철도시설물 점검시스템.In addition to the information acquisition device, a video network camera is mounted on one side of the front or rear side of the vehicle, and the video data obtained by using a tracked vehicle is transmitted to a situation terminal through a wireless LAN or Wibro network in real time. Railroad facility inspection system.
- 제 1 항에 있어서,The method of claim 1,상기 위치정보산출부는 바퀴 일측에 장착되어 바퀴의 회전수에 따라 운행거리를 산출하는 타코메타인 것을 특징으로 하는 궤도차량을 이용한 철도시설물 점검시스템.The location information calculation unit is installed on one side of the wheel railroad facility inspection system using a tracked vehicle, characterized in that the tachometer calculates the travel distance according to the number of revolutions of the wheel.
- 제 1 항에 있어서,The method of claim 1,상기 위치정보산출부는 상기 궤도차량의 주행 가속도를 측정하여 거리 및 위치정보로 환산하도록 하는 가속도센서인 것을 특징으로 하는 궤도차량을 이용한 철도시설물 점검시스템.The position information calculation unit is a railroad facility inspection system using a tracked vehicle, characterized in that the acceleration sensor for measuring the driving acceleration of the tracked vehicle to convert the distance and position information.
- 제 1 항에 있어서,The method of claim 1,상기 위치정보산출부는 궤도차량의 바퀴에 설치된 센서로부터 회전 펄스를 입력받아 속도를 검출하는 속도검출부;The position information calculation unit may include a speed detection unit detecting a speed by receiving a rotation pulse from a sensor installed at a wheel of the track vehicle;상기 속도검출부에서 출력된 신호를 토대로 궤도차량의 운행거리를 산출하는 운행거리검출부;A driving distance detecting unit calculating a driving distance of the track vehicle based on the signal output from the speed detecting unit;상기 운행거리검출부로부터 입력된 운행거리를 입력받고, 역간거리정보가 저장된 역간거리 데이터베이스로부터 입력된 역간거리 데이터를 토대로 궤도차량의 위치정보를 산출하여 상기 데이터수집부로 출력하는 마이크로프로세서;로 구성된 것을 특징으로 하는 궤도차량을 이용한 철도시설물 점검시스템.A microprocessor which receives the driving distance input from the driving distance detection unit, calculates position information of the tracked vehicle based on the distance data obtained from the station distance database storing station distance information, and outputs the position information of the track vehicle to the data collection unit; Railroad facility inspection system using tracked vehicles.
- 제 5 항 내지 제 7 항중 어느 한 항에 있어서,The method according to any one of claims 5 to 7,상기 위치정보산출부는 각 출발역에서 다음 정차역까지의 거리 및 위치데이터를 산출 및 저장하되,The location information calculation unit calculates and stores the distance and location data from each departure station to the next stop,각 출발역에서 거리 및 위치데이터를 초기화하기 위하여 상기 위치정보산출부에 부가된 RF수신부 및 출발역에 장착된 RF송신부를 더 포함하여 구성된 것을 특징으로 하는 궤도차량을 이용한 철도시설물 점검시스템.And an RF receiver attached to the position information calculation unit and an RF transmitter attached to the departure station for initializing distance and position data at each departure station.
- 궤도차량에 다수의 감시카메라로 구성된 카메라부, 조명부, 센서부, 위치정보산출부를 포함한 정보획득장치를 장착하고 이동하면서 획득된 각 영상데이터, 소음 및 진동데이터, 위치정보를 서버부로 전송하여 철도시설물을 점검하도록 하는 궤도차량을 이용한 철도시설물 감시방법에 있어서,The railroad facility transmits each image data, noise and vibration data, and location information acquired while moving by equipping the track vehicle with an information acquisition device including a camera unit, lighting unit, sensor unit, and position information calculation unit composed of a plurality of surveillance cameras. In the railroad facility monitoring method using a tracked vehicle to check the상기 정보획득장치에 의해 각 감시카메라에서 촬영한 각 영상과, 상기 센서부에서 획득된 소음 및 진동데이터와, 상기 위치정보산출부로부터의 거리정보를 획득하여 상기 서버부로 전송하여 데이터베이스에 저장하는 제1단계;Obtaining each image photographed by each surveillance camera by the information acquisition device, noise and vibration data obtained by the sensor unit, and distance information from the location information calculating unit, and transmitting the image information to the server unit and storing the image information in the database; Stage 1;상기 서버부는 데이터베이스에 저장된 각 영상, 소음 및 진동데이터를 상기 위치정보에 동기시켜 상기 각 영상, 소음 및 진동데이터의 획득 위치를 산출하는 제2단계; 및A second step of calculating, by the server unit, an acquisition position of each image, noise and vibration data by synchronizing each image, noise and vibration data stored in a database with the position information; And상기 데이터베이스에 위치정보에 동기되어 저장된 각 영상,소음 및 진동데이터를 상황실단말기로 전송하여 디스플레이하는 제3단계;를 포함하여 이루어진 것을 특징으로 하는 궤도차량을 이용한 철도시설물 정보획득방법.And transmitting and displaying each image, noise, and vibration data stored in synchronization with the location information in the database to a situation terminal, and displaying the facility information.
- 제 9 항에 있어서, 상기 카메라부를 통해 획득된 영상이 설정된 기준값에서 벗어난 경우 결함위치로 판단하는 단계를 더 포함하여 이루어진 것을 특징으로 하는 궤도차량을 이용한 철도시설물 정보획득방법.10. The method of claim 9, further comprising determining a defect position when an image acquired by the camera unit deviates from a set reference value.
- 제 9 항 또는 제 10 항에 있어서, 상기 각 획득된 영상은 상기 15FPS 내지 30FPS의 정지영상인 것을 특징으로 하는 궤도차량을 이용한 철도시설물 정보획득방법.The method of claim 9 or 10, wherein each of the acquired images is a still image of 15 FPS to 30 FPS.
- 제 9 항에 있어서, 상기 획득된 소음 또는 진동 데이터가 동일한 위치에서 각각 기준값 이상으로 추출될 경우, 해당 위치에 결함이 있는 것으로 판단하는 것을 특징으로 하는 궤도차량을 이용한 철도시설물 정보획득방법.10. The method of claim 9, wherein when the obtained noise or vibration data is extracted at a same position or more than a reference value, it is determined that a corresponding position is defective.
- 제 9 항에 있어서, 상기 제 1 단계에서 상기 위치정보산출부로부터의 거리정보는 각 출발역에서 다음 역까지 거리정보를 획득하되, 출발역에서 거리정보를 초기화하여 적산하는 것을 특징으로 하는 궤도차량을 이용한 철도시설물 정보획득방법.10. The method of claim 9, wherein in the first step, the distance information from the location information calculation unit obtains distance information from each departure station to the next station, and initializes and integrates distance information at the departure station. How to Obtain Information on Railroad Facilities.
- 제 9 항 또는 제 13 항에 있어서, 상기 제 1 단계에서 상기 위치정보산출부로부터의 거리정보는 각 출발역의 위치좌표정보를 저장하거나, 해당 출발역으로부터 입력받은 위치좌표정보를 인식하고, 해당 위치좌표로부터 거리측정을 시작하는 것을 특징으로 하는 궤도차량을 이용한 철도시설물 정보획득방법.The method of claim 9 or 13, wherein the distance information from the location information calculating unit in the first step stores the position coordinate information of each departure station, or recognizes the position coordinate information received from the corresponding departure station, A method for obtaining railroad facility information using a tracked vehicle, characterized in that to start a distance measurement from the vehicle.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2010-0106605 | 2010-10-29 | ||
| KR1020100106605A KR101111569B1 (en) | 2010-07-08 | 2010-10-29 | Railroad facility monitoring system and method using tracked vehicle |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| WO2012057592A2 true WO2012057592A2 (en) | 2012-05-03 |
| WO2012057592A3 WO2012057592A3 (en) | 2012-07-05 |
Family
ID=45997568
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/KR2011/008232 WO2012057592A2 (en) | 2010-10-29 | 2011-10-31 | System and method for monitoring railroad facilities using a railway vehicle |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2012057592A2 (en) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103558814A (en) * | 2013-09-10 | 2014-02-05 | 昆山新金福精密电子有限公司 | Water supply measurement and control system |
| WO2017034531A1 (en) * | 2015-08-21 | 2017-03-02 | Hewlett Packard Enterprise Development Lp | Digital context-aware data collection |
| CN106774022A (en) * | 2017-02-20 | 2017-05-31 | 四川隧唐科技股份有限公司 | A kind of vehicular multidimensional tunneling data acquisition system and its collaboration working method |
| CN107628064A (en) * | 2017-10-17 | 2018-01-26 | 青藏铁路公司 | A kind of special purpose railroad vehicle safety monitoring device and method |
| CN108657223A (en) * | 2018-07-23 | 2018-10-16 | 中国安全生产科学研究院 | A kind of urban track traffic automatic tour inspection system and tunnel deformation detecting method |
| CN110986833A (en) * | 2019-12-25 | 2020-04-10 | 苏州伟信奥图智能科技有限公司 | Method and device for measuring straightness of track |
| CN111027903A (en) * | 2019-12-03 | 2020-04-17 | 中铁第一勘察设计院集团有限公司 | Non-bestriding track asset standing book investigation method based on high-precision vehicle-mounted mobile measurement system |
| CN112339791A (en) * | 2020-10-31 | 2021-02-09 | 六安德玛机械设备有限公司 | Rail fixity detection device and method for rail car in tunnel |
| CN113715868A (en) * | 2021-06-17 | 2021-11-30 | 上海应用技术大学 | Remote track detection system based on time-space coupling |
| CN114701543A (en) * | 2022-04-27 | 2022-07-05 | 中铁第四勘察设计院集团有限公司 | High-precision equipment limit detection early warning system and method based on big data |
| CN118850135A (en) * | 2024-07-08 | 2024-10-29 | 四川文理学院 | Track crack monitoring method and system based on multi-sensor application |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20080103820A (en) * | 2007-05-25 | 2008-11-28 | 한국철도기술연구원 | Hybrid tunnel scanning device |
| KR20090056086A (en) * | 2007-11-29 | 2009-06-03 | 한국건설기술연구원 | Railway facility safety monitoring system and method |
| KR20100021327A (en) * | 2008-08-14 | 2010-02-24 | 한국철도공사 | Track distortion measuring and monitoring system |
| KR20100027711A (en) * | 2008-09-03 | 2010-03-11 | 투아이시스(주) | Contact wire measurement system in electric railway using stereo vision method |
-
2011
- 2011-10-31 WO PCT/KR2011/008232 patent/WO2012057592A2/en active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20080103820A (en) * | 2007-05-25 | 2008-11-28 | 한국철도기술연구원 | Hybrid tunnel scanning device |
| KR20090056086A (en) * | 2007-11-29 | 2009-06-03 | 한국건설기술연구원 | Railway facility safety monitoring system and method |
| KR20100021327A (en) * | 2008-08-14 | 2010-02-24 | 한국철도공사 | Track distortion measuring and monitoring system |
| KR20100027711A (en) * | 2008-09-03 | 2010-03-11 | 투아이시스(주) | Contact wire measurement system in electric railway using stereo vision method |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103558814A (en) * | 2013-09-10 | 2014-02-05 | 昆山新金福精密电子有限公司 | Water supply measurement and control system |
| WO2017034531A1 (en) * | 2015-08-21 | 2017-03-02 | Hewlett Packard Enterprise Development Lp | Digital context-aware data collection |
| US20180251141A1 (en) * | 2015-08-21 | 2018-09-06 | Ent. Services Development Corporation Lp | Digital context-aware data collection |
| CN106774022A (en) * | 2017-02-20 | 2017-05-31 | 四川隧唐科技股份有限公司 | A kind of vehicular multidimensional tunneling data acquisition system and its collaboration working method |
| CN106774022B (en) * | 2017-02-20 | 2023-12-05 | 四川隧唐科技股份有限公司 | Vehicle-mounted multi-dimensional tunnel data acquisition system and cooperative working method thereof |
| CN107628064A (en) * | 2017-10-17 | 2018-01-26 | 青藏铁路公司 | A kind of special purpose railroad vehicle safety monitoring device and method |
| CN108657223B (en) * | 2018-07-23 | 2023-06-06 | 中国安全生产科学研究院 | An urban rail transit automatic inspection system and tunnel deformation detection method |
| CN108657223A (en) * | 2018-07-23 | 2018-10-16 | 中国安全生产科学研究院 | A kind of urban track traffic automatic tour inspection system and tunnel deformation detecting method |
| CN111027903A (en) * | 2019-12-03 | 2020-04-17 | 中铁第一勘察设计院集团有限公司 | Non-bestriding track asset standing book investigation method based on high-precision vehicle-mounted mobile measurement system |
| CN111027903B (en) * | 2019-12-03 | 2023-05-12 | 中铁第一勘察设计院集团有限公司 | Ballastless track asset ledger investigation method based on high-precision vehicle-mounted mobile measurement system |
| CN110986833A (en) * | 2019-12-25 | 2020-04-10 | 苏州伟信奥图智能科技有限公司 | Method and device for measuring straightness of track |
| CN112339791A (en) * | 2020-10-31 | 2021-02-09 | 六安德玛机械设备有限公司 | Rail fixity detection device and method for rail car in tunnel |
| CN113715868A (en) * | 2021-06-17 | 2021-11-30 | 上海应用技术大学 | Remote track detection system based on time-space coupling |
| CN114701543A (en) * | 2022-04-27 | 2022-07-05 | 中铁第四勘察设计院集团有限公司 | High-precision equipment limit detection early warning system and method based on big data |
| CN114701543B (en) * | 2022-04-27 | 2023-10-17 | 中铁第四勘察设计院集团有限公司 | High-precision equipment limit detection early warning system and method based on big data |
| CN118850135A (en) * | 2024-07-08 | 2024-10-29 | 四川文理学院 | Track crack monitoring method and system based on multi-sensor application |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2012057592A3 (en) | 2012-07-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101111569B1 (en) | Railroad facility monitoring system and method using tracked vehicle | |
| WO2012057592A2 (en) | System and method for monitoring railroad facilities using a railway vehicle | |
| CN209070035U (en) | A kind of rail traffic electricity car overhead contact line comprehensive detection device | |
| CN200964120Y (en) | High speed vehicle mounted orbital image recognition system | |
| CN102759347B (en) | Online in-process quality control device and method for high-speed rail contact networks and composed high-speed rail contact network detection system thereof | |
| CN110161043A (en) | A kind of subway tunnel structure synthetic detection vehicle | |
| CN110487816A (en) | A kind of tunnel inspection image collecting device and tunnel cruising inspection system | |
| CN202098297U (en) | Automatic inspecting device of key overhead contact network components | |
| CN106049210A (en) | Intelligent rail state detection platform | |
| CN111413353A (en) | Tunnel lining disease comprehensive detection vehicle | |
| JP2018522526A (en) | System and method for video inspection of pantographs along an imaginary contact line | |
| KR101701160B1 (en) | Cantilever defect inspection system | |
| CN105115605A (en) | Track train infrared detection system and detection method | |
| CN203246483U (en) | Intelligent detection system for moving state of locomotive walking part | |
| CN102129775A (en) | Method and system for obtaining evidence by capturing vehicles at traffic crossing under panoramic video detection | |
| CN103729908A (en) | Intelligent inspection device of railway tunnel and application method thereof | |
| CN106679723A (en) | Highway tunnel detection vehicle system | |
| CN210720194U (en) | Tunnel inspection image acquisition device and tunnel inspection system | |
| CN113011252B (en) | Rail foreign matter intrusion detection system and method | |
| CN101424529A (en) | Train scanning system | |
| JP3544703B2 (en) | Tour inspection apparatus and display method for tour inspection | |
| CN211335993U (en) | 360-degree fault image detection system for metro vehicle | |
| KR20220143473A (en) | Mobile rail facility inspection system | |
| CN219038190U (en) | Cable temperature detection device used in tunnel | |
| CN208239314U (en) | Train regular inspection system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 11836684 Country of ref document: EP Kind code of ref document: A2 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 11836684 Country of ref document: EP Kind code of ref document: A2 |