WO2012008751A2 - 복수의 접촉 입력을 감지하는 방법 및 장치 - Google Patents
복수의 접촉 입력을 감지하는 방법 및 장치 Download PDFInfo
- Publication number
- WO2012008751A2 WO2012008751A2 PCT/KR2011/005153 KR2011005153W WO2012008751A2 WO 2012008751 A2 WO2012008751 A2 WO 2012008751A2 KR 2011005153 W KR2011005153 W KR 2011005153W WO 2012008751 A2 WO2012008751 A2 WO 2012008751A2
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- sensing
- input
- signal
- contact
- time
- Prior art date
Links
Images









Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/044—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/044—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means
- G06F3/0446—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means using a grid-like structure of electrodes in at least two directions, e.g. using row and column electrodes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/0416—Control or interface arrangements specially adapted for digitisers
- G06F3/0418—Control or interface arrangements specially adapted for digitisers for error correction or compensation, e.g. based on parallax, calibration or alignment
- G06F3/04186—Touch location disambiguation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2203/00—Indexing scheme relating to G06F3/00 - G06F3/048
- G06F2203/041—Indexing scheme relating to G06F3/041 - G06F3/045
- G06F2203/04104—Multi-touch detection in digitiser, i.e. details about the simultaneous detection of a plurality of touching locations, e.g. multiple fingers or pen and finger
Definitions
- the present invention relates to a method and apparatus for sensing a touch input of a display device, and more particularly, to a method and an apparatus for accurately determining a position of a touch input when there are two or more touch inputs.
- the touch sensing device detects a touch of a user's finger or another device and converts the touch into a suitable electric signal and outputs the same. For example, it is applied to a laptop computer and used as an input means for controlling the movement of a cursor by replacing a mouse, or as an input means for directly selecting and executing an icon or a menu displayed on a screen in combination with a display device. . It is simply used as a means of replacing buttons.
- a touch input device for example, a touch screen
- a display is excluded from an input device such as a keypad, and the only input means (at least as a main input). Increasingly, the use) is increasing.
- a device that recognizes two or more touch inputs at the same time and performs a promised operation according to its position has been introduced. For example, it is possible to recognize two or more contact inputs at the same time so that one input controls the position of the cursor and the click input is implemented by the other input.
- a method of rotating a screen by moving one input based on one input or a method of enlarging or reducing the screen according to a change in distance between two inputs may be implemented.
- the position of two or more contact inputs could not be clearly determined.
- the conventional method provides two X coordinates of the position where the contact input is considered to exist and two Y coordinates of the position where the contact input is considered to be present, respectively. Therefore, there are 4 (that is, 2 x 2) branches in the case of the coordinates (X, Y) of the touch input, and it was not possible to determine which of them is the coordinate of the true touch input.
- the position of the touch input is sensed using a sensing electrode disposed discontinuously, when two or more touch inputs are applied to one sensing electrode, it is difficult to accurately determine the position of the input.
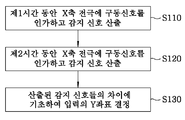
- a method for sensing a touch input in a touch input sensing device including a sensing electrode, supplying a drive signal from the input terminal of the sensing electrode for a first time; A first step of calculating a sensing signal for the touch input, a second step of supplying a driving signal from the input terminal of the sensing electrode for a second time and calculating a sensing signal for the touch input, and the first step And determining a location of the touch input based on a difference between the detected signal calculated in step 2 and the detected signal calculated in the second step, wherein the first time and the second time are different from each other.
- a method is provided.
- the sensing electrode has an input terminal formed at two ends facing each other, and the second step includes supplying a driving signal to each of the two input terminals to calculate a sensing signal.
- the touch input sensing device includes two or more first sensing electrodes extending in a first direction, wherein the first and second steps are performed for each of the first sensing electrodes, and the third step is the contact.
- the position of the first direction of the input is determined.
- the driving signal is supplied to the first direction position of the contact input with respect to a sensing electrode having a larger difference between the sensing signals calculated in the first and second steps. Determine further away from the input terminal of the first electrode.
- the touch input sensing device includes two or more second sensing electrodes extending in a second direction crossing the first direction, the method comprising: supplying a drive signal to each of the second sensing electrodes for a third time period and A fourth step of calculating a sensing signal for a touch input, a fifth step of supplying a driving signal from an input terminal of each of the second sensing electrodes for a fourth time, and calculating a sensing signal for the touch input, and the fourth And a sixth step of determining a position of the second direction of the touch input based on a difference between the detection signal calculated in the step and the detection signal calculated in the fifth step, wherein the third time and the fourth time are May differ from one another.
- the second sensing electrode may have input terminals formed at two ends facing each other, and the fifth step may include calculating driving signals by supplying driving signals to the two input terminals, respectively.
- the second electrode is supplied with the driving signal to the second direction position of the contact input with respect to the sensing electrode having a larger difference between the sensing signals calculated in the fourth and fifth steps. It is desirable to determine further away from the input.
- the first step or the second step includes calculating at least two second direction positions of the touch input from the detection signal, wherein the sixth step is one of the two or more calculated second direction positions. It is preferable to include the step of selecting.
- the fourth step or the fifth step includes calculating at least two first direction positions of the touch input from the sensing signal, and the third step selects one of the two or more calculated first direction positions. It is also preferable to include.
- the first step includes determining whether there are two or more touch inputs from the sensing signal, and wherein the second step is determined when there are two or more touch sensing electrodes in the first step. Is performed.
- the fourth step may include determining whether there are two or more touch inputs from the sensing signal, and the fifth step may determine that there are two or more touch sensing electrodes in the fourth step. Is performed in case.
- said third step determines the position of said contact input further based on a known relationship between the distance from said input and said sensing signal.
- the driving signal is applied to be transmitted in a first direction, the contact input is two or more, and the third step includes: determining the position of the second direction crossing the first direction of the contact input; It is also desirable to include calculating an area ratio between the contact inputs further based on the distance from to each of the contact inputs.
- the step of calculating the area ratio is expressed by equation And
- the area ratio between the contact inputs may be calculated based on Equation 1 , wherein I 1 is a sensing signal calculated in the first step, I 2 is a sensing signal calculated in the second step, and R is a contact input at the input terminal.
- the sensing signal when applied f 1 (x) is the sensing signal at the x position from the input terminal when the first drive signal is applied, f 2 (x) is the sensing signal at the x position from the input terminal when the second driving signal is applied
- S a and S b represent the sensitivity of the sensing signal by the touch input
- a and b represent the distance from the input terminal to the respective touch inputs.
- the driving signal may include a charge
- the sensing signal may be based on a capacitance of the sensing electrode.
- a shorter time of the first time and the second time may be a time for partially charging the capacitance formed in the sensing electrode, and a shorter time of the third time and the fourth time is formed in the sensing electrode. It may be time to partially charge the capacitance.
- the method may further include determining the number of touch inputs based on the strength of the sensing signal.
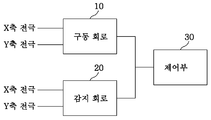
- a sensing electrode a driving circuit for applying a driving signal to the sensing electrode, a sensing circuit for calculating a sensing signal for a touch input in response to the driving signal, and the driving circuit and the sensing circuit.
- a touch input sensing device comprising a controller for controlling, wherein the controller is provided with a touch input sensing device for controlling the driving circuit and the sensing circuit to perform the above-described method.
- a controller capable of controlling a driving circuit to apply a driving signal to a sensing electrode, and controlling the sensing circuit to produce a monitoring signal in response to the driving signal
- the controller is A controller which controls the drive circuit and the sense circuit to perform the method as claimed in claim 1.
- At least one of the driving circuit and the sensing circuit is included in the controller.
- the coordinates of each contact input can be clearly determined.
- FIG. 1 illustrates a touch input sensing device in accordance with an embodiment of the present invention.
- FIG. 2 is a flowchart for explaining a touch input sensing method according to an embodiment of the present invention.
- FIG. 3 is a flowchart for explaining a touch input sensing method according to another embodiment of the present invention.
- 4A and 4B show sensing signals measured for an X-axis electrode, respectively, in accordance with one embodiment of the present invention.
- 5A and 5B show sense signals measured for a Y-axis electrode, respectively, in accordance with one embodiment of the present invention.
- FIG. 6 illustrates a touch input sensing device according to another embodiment of the present invention.
- FIG. 7 is a flowchart for explaining a touch input sensing method according to another embodiment of the present invention.
- 8A-8C illustrate sensing signals measured for an X-axis electrode in accordance with one embodiment of the present invention.
- 9A to 9C are views showing a state of a touch sensing device to which three or more inputs are applied.
- FIG. 10 is a view of a touch input sensing device for explaining a touch input sensing method according to another embodiment of the present invention.
- FIG. 11 is a flowchart for explaining a touch input sensing method according to another embodiment of the present invention.
- FIG. 12 is a diagram illustrating a configuration of a touch sensing apparatus according to an embodiment of the present invention.
- the touch sensing apparatus of the present embodiment includes a plurality of, for example, eight X-axis sensing electrodes X1 to X8 and a plurality of, for example, eight Y-axis sensing electrodes Y1 to Y8.
- the axis sensing electrodes X1-X8 extend in the Y axis
- the Y axis sensing electrodes Y1-Y8 extend in the X axis.
- each of the sensing electrodes has a shape in which a plurality of rhombic electrodes are connected to each other so as to cover the entire area of the touch sensing device while minimizing the overlapping area.
- the shape of the sensing electrodes is not limited thereto.
- the X-axis sensing electrodes X1-X8 and the Y-axis sensing electrodes Y1-Y8 may be respectively connected to the driving circuit 10 and the sensing circuit 12 of FIG. 12, for example.
- the driving circuit and the sensing circuit may be implemented in one circuit.
- a capacitive touch sensing device when a touch input is applied to a capacitor formed by an electrode, a change in capacitance occurs by contact, and the presence of the touch input on the touch screen is measured by measuring the change. Will be detected.
- the methods for sensing the change in capacitance there is a method of measuring the voltage value of the electrode while continuously supplying a driving signal, for example, a charge to the electrode.
- a driving signal for example, a charge to the electrode.
- the driving circuit applies electric charge as a driving signal to each of the electrodes X1-X8 and Y1-Y8, and the sensing circuit measures the voltage generated at each electrode according to the application of the electric charge.
- the capacitance at the electrode can be determined, and a signal representing the measured capacitance can be used as a detection signal representing the application of the contact input.
- a capacitive touch sensing device is described, but the present invention is not limited to the capacitive touch sensor, and the present invention can be applied to a touch sensing device using various parameters such as pressure, temperature, resistance, and optical characteristics. .
- a signal representing the value of each parameter can be used as the detection signal.
- the term "sense signal” refers to a signal used to indicate the strength of a touch input, and is described as the intensity of the sense signal is proportional to the touch input.
- the contact input generates a contact region between the sensing electrode and the contact object, and a capacitance change occurs in the sensing electrode according to the size of the contact region.
- the intensity of the sense signal can be used to calculate how wide a contact area the contact input forms with a particular sense electrode.
- the actual implementation may use a sense signal that is inversely proportional to the strength of the touch input, and any signal that directly or indirectly represents the strength of the touch input is included in the sense signal.
- FIG. 2 illustrating a touch input sensing method according to an embodiment of the present invention
- a method of detecting contact input when A and B are generated will be described.
- step S110 a charge is supplied to each of the X-axis sensing electrodes X1-X8 for a predetermined first time, and the strength of the sensing signal that senses a touch input is calculated.
- the sense signal can be calculated by measuring the capacitance at each electrode.
- step S120 charges are supplied to each of the X-axis sensing electrodes X1-X8 for a predetermined second time, and the strength of the sensing signal sensing the touch input is calculated.
- step S130 a sensing electrode having a touch input among Y electrodes is determined based on a difference between the strength of the sensing signal calculated in step S110 and the strength of the sensing signal calculated in step S120.
- the first time and the second time may be determined differently.
- the first time may be sufficient time for the capacitor formed in the sensing electrode to be fully charged, while the second time may be shorter than the first time.
- the second time is a time for partially charging the capacitance formed in the sensing electrode, and the first time may be a time longer than the second time. In another embodiment, the first time may be shorter than the second time.
- the X-axis sensing electrodes X1-X8 are connected to the driving circuit (for example, the driving circuit 10 of FIG. 12) at the upper end thereof in the embodiment of FIG. 1.
- the electric charge applied from the driving circuit is transferred from the upper end (ie, the end connected to the driving circuit) to the lower end (ie, the opposite end of the end connected to the driving circuit) through the electrodes X1-X8, and in the process Pass the resistance by (X1-X8).
- the charging time of the capacitor formed close to the driving circuit i.e., the capacitor with which the relatively small resistance is connected
- the charging time of the capacitor formed ie., the capacitor with the relatively large resistance
- the sensing electrode farther from the driving circuit shows a lower voltage, and accordingly, it is determined that the sensing electrode exhibits a low capacitance, that is, a weak sensing signal. .
- the charge is supplied for a sufficient time, all the capacitors can be fully charged, so the difference in the sense signal is not large.
- the sense signal measured at the X-axis electrodes indicates the position of the electrode where the contact input is present (ie, as shown in FIG. 4A). Coordinates), X3 and X6 are not significantly different.
- a large contact input is detected at X3 where the contact input A, which is a contact input close to the upper end to which the driving circuit is connected, is located.
- relatively small contact inputs are detected at X6.
- step S130 on the basis of the difference in the degree of contact input calculated in steps S110 and S120, the contact input B at the electrode having the large difference (i.e., X6) is far from the driving circuit, i.e., Y It can be determined that the coordinates are large. Therefore, even if two X coordinates X3 and X6 and two Y coordinates Y3 and Y5 are given, it can be determined that the Y coordinate of the contact input at X6 is larger.
- step S130 for the sensing electrode having a larger difference between the sensing signals calculated in steps S110 and S120, the Y direction position or coordinate of the contact input may be determined farther from the charge input terminal of the X-axis electrode. .
- step S110 it is determined whether there are two or more touch inputs from the calculated sense signal, and step S120 may be performed when it is determined in step S110 that there are two or more touch sense electrodes.
- step S110 a charge is supplied to each of the X-axis electrodes X1-X8 and a sensing signal is calculated, and it is determined therefrom that the position where there is a contact input is two or more. In one embodiment, it may be determined that there is a contact input at that location when the sense signal exceeds a predetermined threshold.
- the coordinates of the contact input cannot be determined uniquely, it is limited to the case where both the X coordinate and the Y coordinate of the determined contact input are two or more, and if only one is one, the coordinates of the contact input can be determined.
- the calculation amount and the operation time can be reduced by performing step S120 only when the contact input is determined to be 2 or more in S110.
- steps S110 to S130 may be additionally performed on the Y-axis sensing electrodes Y1-Y8, and are not performed on the X-axis sensing electrodes X1-X8, but not on the Y-axis sensing electrodes Y1-Y8. It may also be performed for.
- steps S140 charges are supplied to each of the Y-axis sensing electrodes Y1-Y8 for a third time, and the sensing signal is detected.
- the third time and the fourth time may be determined differently.
- the third time may be sufficient time for the capacitor formed in the sensing electrode to be fully charged, while the fourth time may be shorter than the third time.
- the fourth time may be a time for partially charging the capacitance formed in the sensing electrode, and the third time may be longer than the fourth time.
- the third time may be shorter than the fourth time.
- the coordinates of the contact input can be determined uniquely.
- the sensing signal measured at the Y-axis electrodes is shown in FIG.
- Y3 and Y5 there is no significant difference in Y3 and Y5
- a large contact input is detected at Y3 where the contact input A, which is a close contact input from the left side to which the driving circuit is connected, is located.
- FIG. 3 another embodiment in which the sensing signal is calculated twice for both the X-axis and Y-axis sensing electrodes has been described.
- the coordinates of the contact inputs can be determined even if two sensing signals are calculated for only one of the X-axis sensing electrode and the Y-axis sensing electrode.
- one detection signal is calculated for the Y-axis electrode to obtain two Y-axis coordinates
- two detection signals are obtained for the X-axis electrode to obtain two X-axis coordinates.
- FIG. 6 is a diagram illustrating a touch input sensing device according to another embodiment of the present invention.
- the touch sensing device of the present embodiment is substantially the same as the apparatus of FIG. 1 except that each sensing electrode is connected to the driving circuit at both ends, for example, at its upper and lower ends in FIG. 6.
- each connection point is provided to each connection point at both ends.
- the upper connection point is given the coordinates of X1 to X8 for the X-axis sensing electrode
- the lower connection point is given the coordinates of X9 to X16.
- the coordinates of Y1 to Y8 are given to the connection point on the left side to the Y-axis sensing electrode, while the coordinates of Y9 to Y16 are given to the connection point on the right side.
- the method of assigning the coordinates is not limited to the illustrated ones, and if a separate monitoring signal can be obtained at both ends of each sensing electrode and can be distinguished from them, the coordinates may be provided in any manner. It is also possible to distinguish the sensing electrodes in other ways.
- each sensing electrode is identified by the coordinates of X1-X8, and when driving at the lower end, it is identified by the coordinates of X9-X16.
- each sensing electrode is identified by the coordinates of Y1-Y8, and when driving on the right side, it is identified by the coordinates of Y9-Y16.
- step S720 charges are supplied to each of the X-axis sensing electrodes X1 to X8 for a second predetermined time on the same side as S710, and the strength of the sensing signal is calculated.
- the first time and the second time may be different from each other as in the previous embodiment.
- step S730 a charge is supplied to each of the X-axis sensing electrodes X9-X16 for a predetermined third time at the side different from step S710 to calculate the intensity of the sensing signal.
- Y is based on the difference between the strength of the sensing signal calculated in step S710 and the strength of the sensing signal calculated in step S720 and the difference between the strength of the sensing signal calculated in step S710 and the strength of the sensing signal calculated in step S730.
- the sensing electrode in which the touch input exists among the electrodes is determined (step S740). As described above, in the embodiment of FIG. 7, the detection signal is repeatedly calculated with different driving directions for the same electrode. Therefore, unlike the embodiment of Fig. 2, two pairs of data for determining the position of the contact input can be obtained, and the accuracy of the contact input position calculation can be improved.
- the sensing signals calculated in steps S710 and S720 are as shown in FIGS. 8A and 8B, respectively.
- 8A and 8B illustrate the case where the first time is sufficient time to fully charge the capacitor of the sensing electrode, and the second time is shorter than the first time.
- the sensing inputs are arranged adjacent to each other, the difference in the intensity of the sensing signal at the coordinates X2 and X3 is not large.
- a signal comparable with the sensing signal obtained in step S730 may be obtained, including step S725 of driving the sensing electrode in the same direction as step S730 before step S730. That is, it is also possible to drive the sensing electrodes twice in different directions for different times. However, if the sensing electrode is driven for a time sufficient to charge the capacitor of the sensing electrode in step S725, substantially the same sensing signal as in step S710 will be obtained, so in steps S725 and S725, the capacitors of the sensing electrode are completely removed. It would be desirable if it was driven for a period of time that could not be charged.
- step S710 it is determined whether there are two or more touch inputs from the calculated sensing signal, and steps S720 and S730 can be performed only when it is determined in step S710 that there are two or more touch sensing electrodes.
- step S710 electric charges are supplied to each of the X-axis electrodes X1-X8, and a sensing signal is calculated, from which it is determined whether the position at which there is a contact input is two or more. In one embodiment, it may be determined that there is a contact input at that location when the sense signal exceeds a predetermined threshold. Performing steps S720 and S730 only when the contact input is determined to be 2 or more in step S710 can reduce the amount of calculation and the operation time.
- steps S710 to S740 may be additionally performed for the Y-axis sensing electrode, or may be performed only for the Y-axis sensing electrode and not for the X-axis sensing electrode. That is, first, the driving is performed for the sensing electrodes Y1-Y8 for a first time, and the driving for the sensing electrodes Y1-Y8 is performed for a second time different from the first time. Further, after the driving is performed for the sensing electrodes Y9-Y16 for a third time different from the first time, the X coordinate of the contact input is determined using the sensing signal obtained by three drivings. For example, in the example of FIG. 3, it is possible to determine that the contact input of A and B, rather than C and D, is applied by grasping that the sensing input is applied near the left side in Y2.
- the method of the present invention can be used to determine the exact position of the contact input even when there are three or more contact inputs. That is, three coordinate pairs can be determined by obtaining three coordinates for each of the X-axis and the Y-axis, and also grasping the relative position of the sensing input at each coordinate based on the difference of the sensed signals calculated twice.
- additional processing may be required, which will be described with reference to FIGS. 9A to 9C.
- 9A shows a touch input sensing device to which three touch inputs are applied
- 9b and 9c show a touch input sensing device to which four touch inputs are applied.
- the number of contact inputs can be determined based on the strength of the sense signal at each sense electrode. For example, in order to grasp the characteristics of the contact input of FIG. 9B, the intensity of the detection signal measured at the Y7 position is stronger than that of the contact input shown in FIG. 9A through the second driving on the Y axis. Figure out. This makes it possible to grasp that the Y7 electrode has three contact inputs, and determine the coordinates of the four contact inputs based on the information.
- four contact inputs A, B, C, and D may be recognized using sense electrodes connected at both ends to the drive circuit as shown in FIG. 9C.
- three X coordinates (X2, X5, X7) are obtained through one drive on the X-axis sensing electrode, and two Y coordinates (Y5, Y7) through one drive on the Y-axis sensing electrode.
- the second drive from the upper end with respect to the X-axis sensing electrode can be seen that the contact input at X5 is relatively close from the upper end.
- the third drive from the bottom to the X-axis sensing electrode it can be seen that the contact input at X13 is relatively close to the bottom.
- two contact inputs A and B are applied to one sensing electrode X3. Since these contact inputs are only partially applied to the sensing electrode X3, the position of the contact input (i.e., the position of the center of the touch input) should be determined as the position between X3 and the adjacent sensing electrode, not the sensing electrode X3. Specifically, since contact input A is applied to both sensing electrodes X2 and X3 and contact input B is applied to both sensing electrodes X3 and X4, the position of contact input A is between sensing electrodes X2 and X3 and the position of contact input B. Is between the sensing electrodes X3 and X4.
- the present embodiment calculates the intensity of the sense signal by each contact input by driving the sense electrode twice for different time to calculate the sense signal.
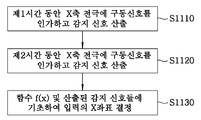
- the method of the present embodiment applies a driving signal to the sensing electrode X3 for the first time and calculates the sensing signal (step S1110).
- a driving signal is applied to the sensing electrode X3 for the second time and the sensing signal is calculated (step S1120).
- the sensing signal at the distance x from the charge input terminal when the driving signal is applied to the sensing electrode X3 for the first time is f 1 (x)
- the charge when the driving signal is applied to the sensing electrode for the second time is given by f 2 (x).
- This function f (x) is, as described above, due to the difference in the magnitude of the resistance passing as the driving signal is transmitted on the sensing electrode, the time constant changes according to the position on the electrode, and the magnitude of the sensing signal measured accordingly. Is a function representing the relation to be changed and may be calculated mathematically or determined through experiments.
- the function f (x) may be stored in advance in, for example, an internal memory of the touch sensor chip, and used to calculate the contact position.
- step S1130 it is possible to determine the strength of the detection signal generated by each contact input based on the known function f (x) and the detection signals measured in the first and second steps. Specifically, since the sensing signal I 1 calculated in the first step is the sum of the sensing signal by the touch input A and the sensing signal for the touch input B, it may be given by Equation 2 below.
- S a and S b represent the sensitivity of the detection signal by the contact inputs A and B, respectively, and are values proportional to the contact area.
- a and b are values representing distances or Y coordinates from the charge input terminals of the contact inputs A and B, respectively, and may be determined in various ways. For example, a and b may be determined by detecting a sensing signal at the Y-axis sensing electrode.
- the sensing signal I 2 calculated in the second step may be given by the following equation (3).
- the sensitivity S a and S b by the respective contact inputs can be obtained, and accordingly, it can be seen how much sensed signal each contact input generated.
- the position determined here is a position in a direction intersecting with the extending direction of the sensing electrode (that is, the Y axis direction), for example, the X coordinate of the contact input.
- the methods described above may be performed by a driving circuit and / or a sensing circuit.
- An example of the configuration of the touch input sensing device is shown in FIG. 12.
- the driving circuit 10 is connected to the X-axis sensing electrode and / or Y-axis sensing electrode, and applies a driving signal to the electrode for a predetermined time as needed.
- the driving circuit 10 may include two driving circuits respectively connected to both ends of the electrode.
- one driving circuit may be connected to both ends of the electrode to perform separate driving from both ends of the electrode.
- the sensing circuit 20 is connected to the X-axis sensing electrode and the Y-axis sensing electrode, and calculates a sensing signal for each electrode in response to the driving signal applied from the driving circuit 10.
- the driving circuit 10 and the sensing circuit 20 are controlled by the controller 30 so that the application of the driving signal and the calculation of the sensing signal can be synchronized.
- These driving circuits and sensing circuits may be separate circuits or may be integrated circuits.
- Each drive circuit and sense circuit may include one or more modules for performing the above methods, which may be implemented as software modules, hardware modules, or a combination thereof. Such drive and sense circuits may be operable to perform the method under the control of a controller.
- one or both of the above-described driving circuit and sensing circuit may be included in the controller. In this case, it is also possible for the controller to be configured in the form of an integrated circuit.
- the methods may be implemented in the form of a program, and may be performed by a computer.
Abstract
감지 전극을 포함하는 접촉 입력 감지 장치에서 접촉 입력을 감지하는 방법이 개시된다. 접촉 입력 감지 방법은 제1시간 동안 상기 감지 전극의 입력단에서 구동 신호를 공급하고 감지 신호를 산출하는 제1단계와, 제2시간 동안 상기 감지 전극의 상기 입력단에서 구동 신호를 공급하고 감지 신호를 산출하는 제2단계와, 상기 제1단계에서 산출된 감지 신호와 상기 제2단계에서 산출된 감지 신호의 차이에 기초하여 접촉 입력의 위치를 결정하는 제3단계를 포함하되, 상기 제1시간과 상기 제2시간은 서로 다른, 접촉 입력 감지 방법이 제공된다. 이로써, 2 이상의 접촉 입력이 인가된 경우에도 접촉 입력의 좌표를 정확하게 결정할 수 있다.
Description
본 발명은 디스플레이 장치의 접촉 입력을 감지하는 방법 및 장치에 관한 것으로, 구체적으로는 2 이상의 접촉 입력이 있는 경우 그 접촉 입력의 위치를 정확하게 결정할 수 있도록 하는 방법 및 장치에 관한 것이다.
접촉 감지 장치는 사용자의 손가락 또는 다른 기구의 접촉을 감지하고 이를 적합한 전기 신호로 변환하여 출력하는 장치로서, 다양한 전자기기에 적용되어 입력 장치로 사용되고 있다. 예를 들어, 랩 탑 컴퓨터에 적용되어 마우스를 대체하여 커서의 이동을 제어하기 위한 입력 수단으로 사용되거나, 디스플레이 장치와 결합되어 화면에 표시된 아이콘이나 메뉴를 직접 선택하여 실행하도록 하는 입력 수단으로 사용된다. 단순하게는 버튼을 대체하는 수단으로 사용되기도 한다. 최근에는 전자 기기의 화면이 대형화되고 기기가 소형화되는 추세에 따라, 키 패드 등의 입력 장치를 배제하고, 디스플레이와 결합된 접촉 입력 장치(예를 들어, 터치스크린)를 유일한 입력수단(적어도 주 입력수단)으로 사용하는 경우가 늘어나고 있다.
이와 같은 접촉 감지 장치의 적용이 확대되면서 단순히 하나의 접촉 입력을 받아 그 위치에 따라 동작하는 방식을 넘어, 2 이상의 접촉 입력을 동시에 인식하고 그에 따라 약속된 동작을 수행하는 장치가 등장하고 있다. 예를 들어, 2 이상의 접촉 입력을 동시에 인식하여 하나의 입력은 커서의 위치를 제어하고, 나머지 하나의 입력에 의해 클릭 입력을 구현하는 것이 가능하게 되었다. 또한, 하나의 입력을 기준으로 삼고 다른 하나의 입력의 이동에 의해 화면을 회전하는 방식이나, 두 입력 간의 거리 변화에 따라 화면을 확대/축소하는 방식을 구현하는 경우도 있다.
2 이상의 접촉 입력을 받아 이를 이용하기 위해서는 그 접촉 입력의 위치를 정확히 결정하는 것이 필수적이다. 그러나 종래에는 2 이상의 접촉 입력이 있는 경우 그 위치를 명확히 결정할 수 없었다. 예를 들어, 2 개의 접촉 입력이 있는 경우, 종래의 방법은 접촉 입력이 존재하는 것으로 생각되는 위치의 X 좌표 2개와, 접촉 입력이 존재하는 것으로 생각되는 위치의 Y 좌표 2개를 각각 제공한다. 따라서, 접촉 입력의 좌표 (X, Y) 의 경우의 수는 4 (즉, 2 x 2) 가지가 존재하며, 그 중 어느 것이 진정한 접촉 입력의 좌표인지는 판단할 수가 없었다. 뿐만 아니라, 접촉 입력의 위치가 불연속적으로 배치되는 감지 전극을 이용하여 감지되는 경우에, 하나의 감지 전극에 2 이상의 접촉 입력이 인가되면 그 입력의 위치를 정확하게 결정하는데 어려움이 있었다.
그러므로, 본 발명은 2 이상의 접촉 입력이 있는 경우에 각각의 접촉 입력의 좌표를 명확하게 결정할 수 있는 접촉 입력 감지 방법 및 장치를 제공하는 것을 목적으로 한다.
상술한 목적을 달성하기 위하여, 본 발명의 일 태양에 따르면, 감지 전극을 포함하는 접촉 입력 감지 장치에서 접촉 입력을 감지하는 방법에 있어서, 제1시간 동안 상기 감지 전극의 입력단에서 구동 신호를 공급하고 상기 접촉입력에 대한 감지 신호를 산출하는 제1단계와, 제2시간 동안 상기 감지 전극의 상기 입력단에서 구동 신호를 공급하고 상기 접촉입력에 대한 감지 신호를 산출하는 제2단계와, 상기 제1단계에서 산출된 감지 신호와 상기 제2단계에서 산출된 감지 신호의 차이에 기초하여 접촉 입력의 위치를 결정하는 제3단계를 포함하되, 상기 제1시간과 상기 제2시간은 서로 다른, 접촉 입력 감지 방법이 제공된다.
바람직하게는, 상기 감지 전극은 서로 대향하는 두 개의 단부에 각각 입력단이 형성되고, 상기 제2단계는 두 개의 입력단에 각각 구동 신호를 공급하여 감지 신호를 산출하는 단계를 포함한다.
상기 접촉 입력 감지 장치는 제1방향으로 연장하는 2 이상의 제 1 감지 전극을 포함하며, 상기 제 1 단계 및 상기 제 2 단계는 상기 제 1 감지 전극 각각에 대해 수행되고, 상기 제 3 단계는 상기 접촉 입력의 상기 제1방향의 위치를 결정하는 것이 바람직하다.
바람직하게는, 상기 제3단계는 상기 제1단계와 상기 제2단계에서 산출된 감지 신호들의 차이가 더 큰 감지 전극에 대해, 상기 접촉 입력의 상기 제1방향 위치를 상기 구동 신호가 공급된 상기 제1전극의 입력단에서 더 먼 곳으로 결정한다.
상기 접촉 입력 감지 장치는 상기 제1방향과 교차하는 제2방향으로 연장하는 2 이상의 제 2 감지 전극을 포함하고, 상기 방법은, 제 3 시간 동안 상기 제 2 감지 전극 각각에 구동 신호를 공급하고 상기 접촉입력에 대한 감지 신호를 산출하는 제4단계와, 제 4 시간 동안 상기 제 2 감지 전극 각각의 입력단에서 구동 신호를 공급하고 상기 접촉입력에 대한 감지 신호를 산출하는 제5단계와, 상기 제4단계에서 산출된 감지 신호와 상기 제5단계에서 산출된 감지 신호의 차이에 기초하여 접촉 입력의 상기 제2방향의 위치를 결정하는 제6단계를 포함하되, 상기 제 3 시간과 상기 제 4 시간은 서로 상이할 수 있다.
상기 제2감지 전극은 서로 대향하는 두 개의 단부에 각각 입력단이 형성되고, 상기 제5단계는 두 개의 입력단에 각각 구동 신호를 공급하여 감지 신호를 산출하는 단계를 포함하는 것도 바람직하다.
상기 제6단계는 상기 제4단계와 상기 제5단계에서 산출된 감지 신호들의 차이가 더 큰 감지 전극에 대해, 상기 접촉 입력의 상기 제2방향 위치를 상기 구동 신호가 공급된 상기 제2전극의 입력단에서 더 먼 곳으로 결정하는 것이 바람직하다.
또한, 상기 제1단계 또는 상기 제2단계는 상기 감지 신호로부터 접촉 입력의 제2방향 위치를 2 이상 산출하는 단계를 포함하고, 상기 제6단계는 상기 2 이상의 산출된 제2방향 위치 중 하나를 선택하는 단계를 포함하는 것이 바람직하다.
상기 제4단계 또는 제5단계는 상기 감지 신호로부터 접촉 입력의 제1방향 위치를 2 이상 산출하는 단계를 포함하고, 상기 제3단계는 상기 2 이상의 산출된 제1방향 위치 중 하나를 선택하는 단계를 포함하는 것도 바람직하다.
상기 접촉 입력은 3개 이상 존재할 수 있다.
바람직하게는, 상기 제1단계는, 상기 감지 신호로부터 2 이상의 접촉 입력이 있는지 여부를 판정하는 단계를 포함하고, 상기 제2단계는 상기 제1단계에서 2 이상의 접촉 감지 전극이 있다고 판정되는 경우에 수행된다.
또한, 바람직하게는, 상기 제4단계는, 상기 감지 신호로부터 2 이상의 접촉 입력이 있는지 여부를 판정하는 단계를 포함하고, 상기 제5단계는 상기 제4단계에서 2 이상의 접촉 감지 전극이 있다고 판정되는 경우에 수행된다.
바람직하게는, 상기 제3단계는, 상기 입력단으로부터의 거리와 상기 감지 신호 사이의 알려진 관계에 더 기초하여 상기 접촉 입력의 위치를 결정한다.
상기 구동 신호는 제1방향으로 전달되도록 인가되고, 상기 접촉 입력은 2 이상이며, 상기 제3단계는, 상기 접촉 입력의 상기 제1방향과 교차하는 제2방향의 위치를 결정하기 위해, 상기 입력단으로부터 각각의 상기 접촉 입력들까지의 거리에 더 기초하여 상기 접촉 입력들 사이의 면적비를 계산하는 단계를 포함하는 것도 바람직하다.
상기 면적비를 계산하는 단계는 수학식  및
및  에 기초하여 상기 접촉 입력들 사이의 면적비를 계산할 수 있으며, 여기서 I1은 상기 제1단계에서 산출된 감지 신호, I2는 상기 제2단계에서 산출된 감지 신호, R은 상기 입력단에 접촉 입력이 인가될 때의 감지 신호, f1(x)는 상기 제1구동신호 인가 시 입력단으로부터 x 위치에서의 감지 신호, f2(x)는 상기 제2구동신호 인가 시 입력단으로부터 x 위치에서의 감지 신호, Sa 및 Sb는 접촉 입력에 의한 감지 신호의 감도, a 및 b는 상기 입력단으로부터 각각의 상기 접촉 입력들까지의 거리를 나타낸다.
에 기초하여 상기 접촉 입력들 사이의 면적비를 계산할 수 있으며, 여기서 I1은 상기 제1단계에서 산출된 감지 신호, I2는 상기 제2단계에서 산출된 감지 신호, R은 상기 입력단에 접촉 입력이 인가될 때의 감지 신호, f1(x)는 상기 제1구동신호 인가 시 입력단으로부터 x 위치에서의 감지 신호, f2(x)는 상기 제2구동신호 인가 시 입력단으로부터 x 위치에서의 감지 신호, Sa 및 Sb는 접촉 입력에 의한 감지 신호의 감도, a 및 b는 상기 입력단으로부터 각각의 상기 접촉 입력들까지의 거리를 나타낸다.
상기 구동 신호는 전하를 포함하고, 상기 감지 신호는 상기 감지 전극의 정전 용량에 기초할 수 있다.
또한, 상기 제1시간과 상기 제2시간 중 더 짧은 시간은 상기 감지 전극에 형성된 커패시턴스를 일부만 충전하는 시간일 수 있으며, 상기 제 3 시간과 상기 제 4 시간 중 더 짧은 시간은 상기 감지 전극에 형성된 커패시턴스를 일부만 충전하는 시간일 수 있다.
상기 감지 신호의 세기에 기초하여 접촉 입력의 개수를 결정하는 단계를 더 포함할 수 있다.
본 발명의 다른 태양에 따르면, 감지 전극, 상기 감지 전극에 구동 신호를 인가하는 구동 회로, 상기 구동 신호에 응답하여 접촉 입력에 대한 감지 신호를 산출하는 감지 회로, 및 상기 구동 회로와 상기 감지 회로를 제어하는 제어기를 포함하는 접촉 입력 감지 장치에 있어서, 상기 제어기는, 상기 구동 회로 및 상기 감지 회로가 상술한 방법을 수행하도록 제어하는 접촉 입력 감지 장치가 제공된다.
본 발명의 또 다른 태양에 따르면, 구동 회로가 감지 전극에 구동 신호를 인가하도록 제어할 수 있고, 감지 회로가 상기 구동 신호에 응답하여 감시 신호를 산출하도록 제어할 수 있는 제어기에 있어서, 상기 제어기는, 상기 구동 회로 및 상기 감지 회로가 제 1 항 내지 제 14 항 중 어느 한 항에 기재된 방법을 수행하도록 제어하는, 제어기가 제공된다.
상기 구동 회로와 상기 감지 회로 중 적어도 하나가 상기 제어기에 포함되는 것도 바람직하다.
본 발명에 의하면, 2 이상의 접촉 입력이 있는 경우에도 각각의 접촉 입력의 좌표를 명확하게 결정할 수 있다.
도 1은 본 발명의 일 실시형태에 따른 접촉 입력 감지 장치를 도시하는 도면.
도 2는 본 발명의 일 실시형태에 따른 접촉 입력 감지 방법을 설명하는 흐름도.
도 3은 본 발명의 다른 실시형태에 따른 접촉 입력 감지 방법을 설명하는 흐름도.
도 4a 및 도 4b는 각기 본 발명의 일 실시형태에 따라 X축 전극에 대해 측정된 감지 신호를 도시하는 도면.
도 5a 및 도 5b는 각기 본 발명의 일 실시형태에 따라 Y축 전극에 대해 측정된 감지 신호를 도시하는 도면.
도 6은 본 발명의 다른 실시형태에 따른 접촉 입력 감지 장치를 도시하는 도면.
도 7은 본 발명의 다른 실시형태에 따른 접촉 입력 감지 방법을 설명하는 흐름도.
도 8a내지 도 8c는 본 발명의 일 실시형태에 따라 X축 전극에 대해 측정된 감지 신호를 도시하는 도면.
도 9a 내지 도 9c는 3개 이상의 입력이 인가된 접촉 감지 장치의 상태를 도시하는 도면.
도 10은 본 발명의 다른 실시형태에 따른 접촉 입력 감지 방법을 설명하기 위한 접촉 입력 감지 장치의 도면.
도 11은 본 발명의 다른 실시형태에 따른 접촉 입력 감지 방법을 설명하는 흐름도.
도 12는 본 발명의 일 실시형태에 따른 접촉 감지 장치의 구성을 도시하는 도면.
이하, 본 발명의 구체적인 실시형태를 첨부된 도면을 참조하여 설명한다.
도 1은 본 발명의 일 실시형태에 따른 디스플레이 장치에서 사용되는 접촉 감지 장치를 도시하는 도면이다. 본 실시형태의 접촉 감지 장치는 다수개, 예를 들면, 8개의 X축 감지전극(X1 내지 X8)과 다수개, 예를 들면, 8개의 Y축 감지전극(Y1 내지 Y8)을 포함하며, X축 감지전극(X1-X8)은 Y축으로 연장하고, Y축 감지전극(Y1-Y8)은 X축으로 연장한다. 본 실시형태에서, 각각의 감지전극들은 접촉 감지 장치의 전체 면적을 커버하면서도 서로 겹치는 면적을 최소화하도록 여러 개의 마름모꼴 전극이 서로 연결된 형태를 갖는다. 그러나, 감지전극들의 형태는 이에 제한되지 않는다. X축 감지전극(X1-X8) 및 Y축 감지전극(Y1-Y8)은, 예를 들면, 도 12의 구동회로(10) 및 감지회로(12)에 각기 연결될 수 있으며, 일 실시형태에서, 구동회로 및 감지회로는 하나의 회로로 구현되는 것도 가능하다.
정전용량(capacitance) 방식의 접촉 감지 장치에 있어서, 전극에 의해 형성된 커패시터(capacitor)에 접촉 입력이 인가되면 접촉에 의해 정전용량의 변화가 발생하며, 이 변화를 측정함으로써 터치스크린 상의 접촉입력의 존재를 감지하게 된다. 정전용량의 변화를 감지하는 방안 중 하나로서, 전극에 계속적으로 구동 신호, 예를 들어 전하를 공급하면서 전극의 전압 값을 측정하는 방법이 있다. 일반적으로, 일정한 전류가 공급되는 경우에 정전용량과 전압의 관계는 다음의 수학식 1로 표현될 수 있다.
수학식 1 
여기서, t는 시간, C는 정전용량, v는 전압 그리고 i는 전류를 나타낸다.
위의 식에서 볼 수 있듯이, 동일한 시간 동안 전류를 인가하였다면 정전용량이 큰 전극일수록 낮은 전압을 나타내게 된다.
따라서 본 실시형태의 접촉 감지 장치에서, 구동회로는 각각의 전극(X1-X8, Y1-Y8)에 구동 신호로서 전하를 인가하고, 감지회로는 전하 인가에 따라 각각의 전극에서 발생하는 전압을 측정하여 전극에서의 정전용량을 결정하고, 측정된 정전용량을 나타내는 신호를 접촉 입력의 인가를 나타내는 감지 신호로 사용할 수 있다.
본 실시형태에서는 정전용량 방식의 접촉 감지 장치에 대해 설명하지만, 본 발명은 정전용량 방식의 장치에 제한되는 것은 아니며, 압력, 온도, 저항, 광학 특성 등 다양한 파라미터를 이용하는 접촉 감지 장치에도 적용될 수 있다. 이 경우에는, 각각의 파라미터의 값을 나타내는 신호를 감지 신호로 사용할 수 있다.
본 명세서에서 "감지 신호"라 함은 접촉 입력의 강도를 나타내는데 쓰이는 신호를 의미하며, 감지 신호의 세기가 접촉 입력에 비례하는 것으로 설명된다. 접촉 입력에 의해 감지 전극과 접촉 물체 사이에 접촉 영역이 생성되고, 접촉 영역의 크기에 따라 감지 전극에서 정전용량 변화가 발생한다. 따라서, 감지 신호의 세기는 접촉 입력이 특정 감지 전극과 얼마나 넓은 접촉 영역을 형성하는지를 계산하는데 이용될 수 있다. 그러나, 실제 구현에서는 접촉 입력의 세기와 반비례하는 감지 신호를 사용할 수도 있으며, 접촉 입력의 세기를 직접 또는 간접적으로 나타내는 신호라면 모두 감지 신호에 포함됨을 유의하여야 한다.
이하, 본 발명의 일 실시형태에 따른 접촉 입력 감지 방법을 설명하는 도 2를 참조하여, 도 1의 실시형태의 접촉 감지 장치에 좌표 (X3, Y3) 및 (X6, Y5)에 2개의 접촉 입력 A와 B가 발생된 경우의 접촉 입력 감지 방법에 대해 설명한다.
먼저, 단계 S110에서 사전 결정된 제1시간 동안 X축 감지 전극(X1-X8) 각각에 전하를 공급하고 접촉 입력을 감지한 감지 신호의 세기를 산출한다. 상술한 바와 같이, 감지 신호는 각 전극에서의 정전용량을 측정함으로써 산출될 수 있다. 다음, 단계 S120에서 사전 결정된 제2시간 동안 X축 감지 전극(X1-X8) 각각에 전하를 공급하고 접촉 입력을 감지한 감지 신호의 세기를 산출한다. 다음, 단계 S130에서, 단계 S110에서 산출된 감지 신호의 세기와 단계 S120에서 산출된 감지 신호의 세기의 차이에 기초하여 Y전극 중 접촉 입력이 존재하는 감지 전극을 결정한다.
여기서, 제1시간과 제2시간은 서로 다르게 결정될 수 있다. 예를 들어, 제1시간은 감지 전극에 형성되는 커패시터가 완전히 충전되기에 충분한 시간인 반면, 제2시간은 제1시간에 비해 짧은 시간일 수 있다. 다른 실시형태에서, 제2시간은 감지 전극에 형성된 커패시턴스를 일부만 충전하는 시간이고, 제1시간은 제2시간보다 긴 시간일 수 있다. 또 다른 실시형태에서는, 제1시간이 제2시간보다 짧은 시간일 수도 있다.
이러한 시간의 차이는 위치에 따른 커패시터의 충전 정도의 차이를 가져온다. 예를 들어 설명하면, X축 감지 전극(X1-X8)은 그 일단, 도 1의 실시형태에서는 상단에서 구동회로(예를 들면, 도 12의 구동회로(10))와 접속된다. 따라서, 구동회로에서 인가된 전하는 전극(X1-X8)을 통해 상단(즉, 구동회로에 접속된 단부)에서 하단(즉, 구동회로에 접속된 단부의 대향 단부)으로 전달되며, 그 과정에서 전극(X1-X8)에 의한 저항을 통과한다. 간략화된 모델에서, 회로의 시정수(time constant)는  = RㆍC (여기서 R은 저항, C는 정전용량)로 주어져 저항에 비례하므로, 더 많은 저항을 통과할수록 커패시터의 충전에 필요한 시간이 길어진다.
= RㆍC (여기서 R은 저항, C는 정전용량)로 주어져 저항에 비례하므로, 더 많은 저항을 통과할수록 커패시터의 충전에 필요한 시간이 길어진다.
그러므로, 구동회로로부터 가까운 곳에서 형성된 커패시터(즉, 상대적으로 작은 저항이 연결된 커패시터)의 충전시간이 구동회로로부터 먼 곳에서 형성된 커패시터(즉, 상대적으로 큰 저항이 연결된 커패시터)의 충전시간보다 짧다.
이러한 특성을 이용하여 감지 전극에 짧은 시간 동안만 전하를 공급하면, 구동회로로부터 먼 감지 전극일수록 더 낮은 전압을 나타내게 되고, 결국 수학식 1에 따라 낮은 정전용량, 즉 약한 감지 신호를 나타내는 것으로 판단된다. 반면, 충분한 시간 동안 전하를 공급하면 모든 커패시터가 완전히 충전될 수 있으므로 감지 신호의 차이는 크지 않다.
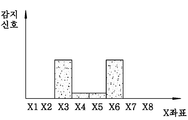
예를 들어, 커패시터가 충전되기에 충분한 시간인 제1시간 동안 전하를 공급한 경우, X축 전극들에서 측정된 감지 신호는 도 4a에 도시된 바와 같이 접촉 입력이 존재하는 전극의 위치(즉, 좌표)인 X3 및 X6에서 큰 차이가 없다. 반면, 제1시간 보다 짧은 시간인 제2시간 동안 전하를 공급한 경우, 도 4b에 도시된 바와 같이, 구동회로가 접속된 상단으로부터 가까운 접촉 입력인 접촉 입력 A가 위치한 X3에서 큰 접촉 입력이 감지된 반면, X6에서는 상대적으로 작은 접촉 입력이 감지된다.
즉, 단계 S110과 단계 S120에서 감지된 접촉 입력의 차이는, 구동회로부터 가까운 X3에서보다 구동회로부터 먼 X6에서 더 크게 나타난다. 따라서, 단계 S130에서는 단계 S110과 단계 S120에서 산출된 접촉 입력의 정도의 차이에 기초하여, 그 차이가 큰 전극(즉, X6)에서의 접촉 입력(B)이 구동회로로부터 멀다는 것, 즉 Y좌표가 크다는 것을 판정할 수 있다. 그러므로, 2개의 X좌표(X3 및 X6)와 2개의 Y좌표(Y3 및 Y5)가 주어진 경우에도, X6에서의 접촉 입력의 Y좌표가 더 크다고 결정할 수 있다. 다시 말해, 단계 S130에서는 단계 S110과 단계 S120에서 산출된 감지 신호들의 차이가 더 큰 감지 전극에 대해, 접촉 입력의 Y 방향 위치 또는 좌표를 X축 전극의 전하 입력단에서 더 먼 곳으로 결정할 수 있다는 것이다. 이로써, 2개의 접촉 입력(즉, (X3, Y3)의 입력 A와 (X6, Y5)의 입력 B)을 일의적으로 결정할 수 있게 된다.
일 실시형태에서, 단계 S110에서는 산출된 감지 신호로부터 2 이상의 접촉 입력이 있는지 여부를 판정하고, 단계 S120은 단계 S110에서 2 이상의 접촉 감지 전극이 있다고 판정되는 경우에 수행될 수 있다. 단계 S110에서는 각각의 X축 전극(X1-X8)에 전하를 공급하고 감지 신호를 산출하며, 그로부터 접촉 입력이 있는 것으로 판단되는 위치가 2 이상인지 판정한다. 일 실시형태에서, 감지 신호가 소정의 문턱값을 넘는 경우에 해당 위치에 접촉 입력이 존재하는 것으로 판정할 수 있다. 접촉 입력의 좌표를 일의적으로 결정할 수 없는 경우는 판정된 접촉 입력의 X좌표 및 Y좌표가 모두 2 이상인 경우에 한정되며, 어느 한쪽이 1개 뿐인 경우에는 접촉 입력의 좌표를 결정할 수 있으므로, 단계 S110에서 접촉 입력이 2 이상으로 판정되는 경우에만 단계 S120을 수행함으로서 계산량 및 동작 시간을 경감할 수 있게 된다.
한편, 이상의 단계 S110 내지 단계 S130은 Y축 감지 전극(Y1-Y8)에 대해서 추가적으로 수행될 수도 있고, X축 감지 전극(X1-X8)에 대해 수행되지 않고 Y축 감지 전극(Y1-Y8)에 대해서 수행될 수도 있다. Y축 감지 전극(Y1-Y8)에 대해서 단계들이 추가적으로 수행되는 경우, 도 3에 도시된 바와 같이, 단계 S140에서 제3시간 동안 Y축 감지 전극(Y1-Y8) 각각에 전하를 공급하고 감지 신호를 산출한다. 또한, 단계 S150에서는 제4 시간 동안 Y축 감지 전극(Y1-Y8) 각각의 전하 입력단에서 전하를 공급하고 감지 신호를 산출한다. 그리고, 단계 S150에서는, 단계 S130에서 산출된 감지 신호와 단계 S140에서 산출된 감지 신호의 차이에 기초하여 접촉 입력의 X축 위치(즉, 좌표)를 결정한다.
여기서도, 제3시간과 제4시간은 서로 다르게 결정될 수 있다. 예를 들어, 제3시간은 감지 전극에 형성되는 커패시터가 완전히 충전되기에 충분한 시간인 반면, 제4시간은 제3시간에 비해 짧은 시간일 수 있다. 다른 실시형태에서, 제4시간은 감지 전극에 형성된 커패시턴스를 일부만 충전하는 시간이고, 제3시간은 제4시간보다 긴 시간일 수 있다. 또 다른 실시형태에서는, 제3시간이 제4시간보다 짧은 시간일 수도 있다.
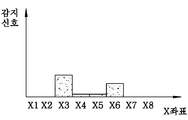
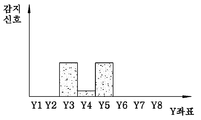
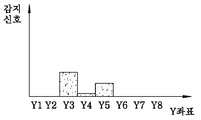
이와 같이 전하 공급 시간에 차이를 둠으로써, 접촉 입력의 좌표를 일의적으로 결정할 수 있게 된다. 예를 들어 도 1에 도시된 접촉 입력 A 및 B가 인가된 경우를 설명하면, 커패시터가 충전되기에 충분한 시간인 제3시간 동안 전하를 공급한 경우, Y축 전극들에서 측정된 감지 신호는 도 5a에 도시된 바와 같이 접촉 입력이 존재하는 좌표인 Y3 및 Y5에서 큰 차이가 없다. 반면, 제3시간 보다 짧은 시간인 제4시간 동안 전하를 공급한 경우, 도 5b에 도시된 바와 같이, 구동회로가 접속된 좌측으로부터 가까운 접촉 입력인 접촉 입력 A가 위치한 Y3에서 큰 접촉 입력이 감지된 반면, Y5에서는 상대적으로 작은 접촉 입력이 감지된다. 그러므로, 감지 신호의 변화가 큰 접촉 입력이 구동회로 접속 단으로부터 멀리 떨어져 있는 것으로 판단할 수 있고, 결국 Y5에 대응하는 접촉 입력의 X좌표가 좌측에서 멀리 떨어진 X5임을 결정할 수 있다.
도 3에서는 X축 및 Y축 감지 전극 모두에 대하여 2회씩의 감지 신호의 산출이 이루어지는 다른 실시형태를 설명하였다. 그러나, 실질적으로, 접촉 입력이 2개라면, X축 감지 전극과 Y축 감지 전극 중 어느 한쪽에 대해서만 2회의 감지 신호 산출이 이루어져도 접촉 입력의 좌표를 결정할 수 있다. 예를 들어, Y축 전극에 대해 1회 감지 신호 산출을 수행하여 2개의 Y축 좌표를 얻고, X축 전극에 대해 2회 감지 신호 산출을 수행하여 2개의 X축 좌표를 얻는 동시에 2개의 X축 좌표에 대응하는 감지 신호 중 어느 것의 Y좌표가 더 큰 지를 파악하여, 접촉 입력의 정확한 좌표를 결정할 수 있는 것이다. 따라서, 실제 구현에서는 도 2에 도시된 모든 단계가 수행될 필요는 없다. 또한, 단계들은 도 2에 도시된 것과 동일한 순서로 실행될 필요가 없다. 구현에 따라, X축 전극과 Y축 전극을 번갈아 구동하거나, 동시에 구동하는 것도 가능하다.
도 6은 본 발명의 다른 실시형태에 따른 접촉 입력 감지 장치를 도시하는 도면이다. 본 실시형태의 접촉 감지 장치는 각각의 감지 전극이 양단에서, 예를 들어, 도 6에서는 그 상단과 하단에서 모두 구동회로에 접속된다는 것을 제외하고는 도 1의 장치와 실질적으로 동일하다. 본 실시형태의 감지 전극은 양단의 접속점 각각에 별도의 좌표가 부여된다. 예를 들어, 도 6의 실시형태에서, X축 감지 전극에 대해 상단의 접속점에는 X1 내지 X8의 좌표가 부여되는 반면, 하단의 접속점에는 X9 내지 X16의 좌표가 부여된다. 또한, Y축 감지 전극에 대해 좌측의 접속점에는 Y1 내지 Y8의 좌표가 부여되는 반면, 우측의 접속점에는 Y9 내지 Y16의 좌표가 부여된다. 그러나, 좌표의 부여방식은 도시된 것에 제한되는 것이 아니고, 각 감지 전극의 양단에서 별도의 감시 신호를 얻을 수 있고 이들을 구분할 수 있다면 여하한 방식으로 좌표를 부여하여도 무방하며, 좌표를 부여하지 않고 다른 방식으로 감지 전극을 구분하는 것도 가능하다.
이하, 본 발명의 일 실시형태에 따른 접촉 입력 감지 방법을 설명하는 도 7를 참조하여, 도 6의 실시형태의 접촉 감지 장치에 (상측 및 좌측 좌표를 기준으로) 좌표 (X2, Y2) 및 (X3, Y3)에 2개의 접촉 입력 A와 B가 입력된 경우의 접촉 입력 감지 방법에 대해 설명한다. 이하의 설명에서, X축 감지 전극을 상단에서 구동하는 경우에는 각 감지 전극을 X1-X8의 좌표로 식별하고, 하단에서 구동하는 경우에는 X9-X16의 좌표로 식별한다. 동일하게, Y축 감지 전극을 좌측에서 구동하는 경우에는 각 감지 전극을 Y1-Y8의 좌표로 식별하고, 우측에서 구동하는 경우에는 Y9-Y16의 좌표로 식별한다.
먼저, 단계 S710에서 사전 결정된 제1시간 동안 X축 감지 전극(X1-X8) 각각에 전하를 공급하고 감지 신호의 세기를 산출한다. 다음, 단계 S720에서는 S710과 동일한 측에서 사전 결정된 제2시간 동안 X축 감지 전극(X1-X8) 각각에 전하를 공급하고 감지 신호의 세기를 산출한다. 여기서 제1시간과 제2시간은 서로 상이한 시간일 수 있음은 이전 실시형태에서와 같다. 다시, 단계 S730에서는, 단계 S710과 다른 측에서 사전 결정된 제3시간 동안 X축 감지 전극(X9-X16) 각각에 전하를 공급하여 감지 신호의 세기를 산출한다. 역시, 제3시간과 제1시간은 서로 상이한 시간일 수 있다. 마지막으로, 단계 S710에서 산출된 감지 신호의 세기와 단계 S720에서 산출된 감지 신호의 세기의 차이 및 단계 S710에서 산출된 감지 신호의 세기와 단계 S730에서 산출된 감지 신호의 세기의 차이에 기초하여 Y전극 중 접촉 입력이 존재하는 감지 전극을 결정한다(단계 S740). 이와 같이, 도 7의 실시형태에서는 동일한 전극에 대해 구동 방향을 달리하여 감지 신호 산출이 반복하여 이루어진다. 따라서, 도 2의 실시형태와 달리 접촉 입력의 위치를 판정하기 위한 데이터가 2쌍 얻어지게 되어, 접촉 입력 위치 산정의 정밀도를 높일 수 있다.
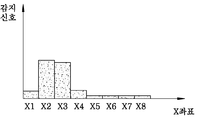
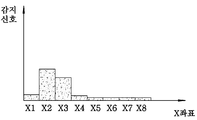
예를 들어, 도 6에 도시된 바와 같이 A, B 위치에 2개의 접촉 입력이 인가된 경우, 단계 S710 및 단계 S720에서 산출된 감지 신호는 각각 도 8a 및 8b에 도시된 바와 같다. 도 8a 및 8b는, 예시를 위해, 제1시간은 감지 전극의 커패시터를 완전히 충전하기에 충분한 시간이고, 제2시간은 제1시간보다 짧은 시간인 경우를 도시한다. 도 8b에서 알 수 있듯이, 감지 입력이 서로 인접하여 배치되어 있기 때문에, 좌표 X2와 X3에서의 감지 신호의 세기 차이가 크지 않다. 따라서, 단계 S710과 S720에서 측정된 신호의 차이만으로는 X2와 X3에서의 접촉 입력 중 어느 것이 상단에 가까운 것인지를 신뢰성 있게 식별해 내기가 어렵고, 주어진 입력이 A와 B 인지 아니면 C와 D 인지 판정하기가 어렵다. 그러나, 단계 S730 에서 다른 방향으로부터 전극을 구동하여 도 8c와 같은 감지 신호 세기 분포를 얻으면, 도 8a와 8b 사이의 감지 신호 차이 및 도 8a와 8c 사이의 감지 신호 차이를 얻을 수 있게 되고, 이들 정보를 결합하여 접촉 입력의 Y좌표를 더욱 정밀하게 결정할 수 있게 된다.
여기서, 점선으로 도시된 바와 같이, 단계 S730 전에 단계 S730에서와 동일한 방향에서 감지 전극을 구동하는 S725단계를 포함하여, 단계 S730에서 얻어지는 감지 신호와 비교할 수 있는 신호를 얻을 수도 있다. 즉, 감지 전극을 서로 다른 방향에서 상이한 시간 동안 2회씩 구동하는 것도 가능하다. 다만, 단계 S725에서 감지 전극의 커패시터를 충전하기에 충분한 시간동안 감지 전극을 구동한다면, 실질적으로 단계 S710에서와 동일한 감지 신호를 얻을 것이므로, 단계 S725는 단계 S710 및 단계 S725가 감지 전극의 커패시터를 완전히 충전하지 못하는 시간 동안 구동되는 경우에 바람직할 것이다.
일 실시형태에서, 단계 S710에서는 산출된 감지 신호로부터 2 이상의 접촉 입력이 있는지 여부를 판정하고, 단계 S720와 S730은 단계 S710에서 2 이상의 접촉 감지 전극이 있다고 판정되는 경우에만 수행될 수 있다. 단계 S710에서는 각각의 X축 전극(X1-X8)에 전하를 공급하고 감지 신호를 산출하며, 그로부터 접촉 입력이 있는 것으로 판단되는 위치가 2 이상인지 판정한다. 일 실시형태에서, 감지 신호가 소정의 문턱값을 넘는 경우에 해당 위치에 접촉 입력이 존재하는 것으로 판정할 수 있다. 단계 S710에서 접촉 입력이 2 이상으로 판정되는 경우에만 단계 S720와 S730을 수행하면 계산량 및 동작 시간을 경감할 수 있게 된다.
또한, 다른 실시형태에서, 단계 S710 내지 단계 S740은 Y축 감지 전극에 대해서 추가적으로 수행될 수도 있고, X축 감지 전극에 대해 수행되지 않고 Y축 감지 전극에 대해서만 수행될 수도 있다. 즉, 먼저 감지 전극 Y1-Y8에 대해 제1시간 동안 구동을 수행하고, 감지 전극 Y1-Y8에 대해 제1시간과 상이한 제2시간 동안 구동을 수행한다. 또한, 감지 전극 Y9-Y16에 대해 제1시간과 상이한 제3시간 동안 구동을 수행한 후, 3회 구동으로 얻어진 감지 신호를 이용하여 접촉 입력의 X좌표를 결정한다. 예를 들어, 도 3의 예에서, 감지 입력이 Y2에서 좌측에 가까운 쪽에 인가되었음을 파악함으로써, C와 D가 아니라 A와 B의 접촉 입력이 인가되었음을 판정할 수 있는 것이다.
한편, 본 발명의 방법은 접촉 입력이 3개 이상인 경우에도 정확한 접촉 입력의 위치를 파악하는데 사용할 수 있다. 즉, X축과 Y축 각각에 대해 3개의 좌표를 얻고, 또한 2회 산출된 감지 신호의 차이에 기초하여 각 좌표에서의 감지 입력의 상대적 위치를 파악함으로써 3개의 좌표쌍을 결정할 수 있는 것이다. 다만, 2 이상의 접촉입력이 동일한 X 또는 Y좌표를 갖는 경우에는 추가적인 처리가 필요할 수 있으며, 이에 대해 도 9a 내지 도 9c를 참조하여 설명한다.
도9a는 3개의 접촉 입력이 인가된 접촉 입력 감지 장치를 도시하고, 9b 및 9c는 4개의 접촉 입력이 인가된 접촉 입력 감지 장치를 도시한다.
먼저 도 9a에 도시된 바와 같이 3개의 접촉 입력(A,B,C)이 인가된 경우, 감지 전극을 1회 구동하면 3개의 X좌표 (X2, X5, X7)와 2개의 Y좌표 (Y5, Y7)를 얻을 수 있다. 이에 대해, X축 감지 전극에 대해 2회째의 구동을 통해 감지 신호의 차이를 산출하면, X5에서의 입력 B가 상대적으로 상단으로부터 가까이 위치함을 파악할 수 있으며, 그에 따라 X5에서의 입력 B의 Y좌표가 Y5임을 결정할 수 있다.
다음, 도 9b에 도시된 바와 같이 4개의 접촉 입력(A,B,C,D)이 인가되었으나, 3개의 입력(A,D,C)이 동일한 Y좌표를 갖고 2개의 입력(B,D)이 동일한 X좌표를 갖는 경우를 고려한다. 이 경우, X축 감지 전극에 대한 1회의 구동을 통해 3개의 X좌표(X2, X5, X7)를 얻고, Y축 감지 전극에 대한 1회의 구동을 통해 2개의 Y 좌표 (Y5, Y7)를 얻는다. 또한, X축 감지 전극에 대한 2회째의 구동을 통해, X5에서의 접촉 입력이 상대적으로 상단으로부터 가깝다는 것을 파악할 수 있다. 그러나, 이상의 과정을 통해서는, 도 9b의 접촉 입력들에 대해 산출된 좌표와 도 9a의 접촉 입력들에 대해 산출된 좌표가 실질적으로 동일하게 된다. 즉, 접촉 입력 D가 누락될 수 있는 것이다. 따라서, 일 실시형태에서, 각 감지 전극에서의 감지 신호의 세기에 기초하여 접촉 입력의 개수를 결정할 수 있다. 예를 들어, 도 9b의 접촉입력의 특성을 파악하기 위해, Y축에 대한 2차의 구동을 통해, Y7 위치에서 측정된 감지 신호의 강도가, 도 9a에 도시된 접촉입력의 경우보다 강하다는 것을 파악한다. 그에 의해, Y7 전극에는 3개의 접촉입력이 있음을 파악하고, 그 정보에 기초하여 4개의 접촉입력의 좌표를 결정할 수 있게 된다.
다른 실시형태에서, 도 9c에 도시된 바와 같이 양단이 구동회로에 연결된 감지 전극을 이용하여 4개의 접촉 입력(A,B,C,D)을 인식할 수 있다. 구체적으로, 먼저, X축 감지 전극에 대한 1회 구동을 통해 3개의 X좌표(X2, X5, X7)를 얻고, Y축 감지 전극에 대한 1회의 구동을 통해 2개의 Y 좌표 (Y5, Y7)를 얻는다. 또한, X축 감지 전극에 대해 상단으로부터 2회째의 구동을 하여, X5에서의 접촉 입력이 상대적으로 상단으로부터 가깝다는 것을 파악할 수 있다. 추가적으로, X축 감지 전극에 대해 하단으로부터 3회째의 구동을 하면, X13에서의 접촉 입력이 상대적으로 하단에 가깝다는 것을 파악할 수 있다. 따라서, X5 (또는 X13) 위치에 2개의 입력이 존재한다는 것을 알 수 있고, D의 접촉입력을 누락하지 않고 4개 접촉입력의 좌표를 결정할 수 있게 된다. 동일한 Y좌표를 갖는 3개의 접촉입력이 인가된 경우를 설명하였으나, 위의 실시형태는 동일한 X좌표를 갖는 3개의 접촉입력이 인가된 경우에도 동일하게 적용될 수 있으며, 다만 이 경우에는 Y축 감지 전극에 대해 3회의 구동이 이루어진다는 점이 다를 뿐이다.
또한, 본 발명의 다른 실시형태에 따르면, 상술한 원리를 적용하여, 하나의 감지 전극에 2 이상의 접촉 입력이 인가되었을 때 이들 접촉 입력의 정확한 위치를 결정하는 방법이 제공되며, 이를 도 10 및 도 11을 참조하여 설명한다.
도 10을 참조하면, 하나의 감지 전극 X3에 2 개의 접촉 입력 A와 B가 인가되어 있다. 이들 접촉 입력들은 부분적으로만 감지 전극 X3에 인가되므로, 접촉 입력의 위치(즉, 접촉 입력의 중심의 위치)는 감지 전극 X3이 아니라 X3과 인접 감지전극 사이의 위치로 결정되어야 한다. 구체적으로, 접촉 입력 A는 감지 전극 X2와 X3 모두에 인가되고, 접촉 입력 B는 감지 전극 X3와 X4 모두에 인가되므로, 접촉 입력 A의 위치는 감지 전극 X2과 X3 사이이고, 접촉 입력 B의 위치는 감지 전극 X3와 X4 사이이다. 따라서, 각각의 접촉 입력의 위치를 정확하게 결정하기 위해서는, 접촉 입력들이 어느 정도의 비율로 각 전극에 인가되었는지를 결정할 수 있어야 한다. 하지만, 감지 전극 X3에서는 접촉 입력 A와 B에 의해 발생한 감지 신호가 중첩되어 감지될 뿐이고, 각각의 접촉 입력이 발생시키는 개별 감지 신호의 강도는 파악하기 어렵다.
본 실시형태는, 상이한 시간 동안 감지 전극을 2회 구동하여 감지 신호를 산출함으로써 각각의 접촉 입력에 의한 감지 신호의 강도를 산출한다. 도 11을 참조하면, 먼저 본 실시형태의 방법은 제1시간 동안 감지 전극 X3에 구동 신호를 인가하고 감지 신호를 산출한다(단계 S1110). 또한, 제2시간 동안 감지 전극 X3에 구동 신호를 인가하고 감지 신호를 산출한다(단계 S1120).
한편, 감지 전극 X3에 제1시간 동안 구동 신호를 인가한 경우의 전하 입력단으로부터의 거리 x에서의 감지 신호는 f1(x)이고, 감지 전극에 제2시간 동안 구동 신호를 인가한 경우의 전하 입력단으로부터의 거리 x에서의 감지 신호는 f2(x)로 주어짐이 알려져 있다고 가정한다. 이러한 함수 f(x)는, 상술한 바와 같이, 구동 신호가 감지 전극 상에서 전달되면서 통과하는 저항의 크기의 차이에 기인하여 전극 상의 위치에 따라 시정수가 변화되고 또한, 그에 따라 측정되는 감지 신호의 크기가 변화되는 관계를 나타내는 함수로서, 수학적으로 산출될 수도 있고 실험을 통해 결정될 수도 있다. 함수 f(x)는, 예를 들면, 터치센서 칩의 내부 메모리 등에 미리 저장되어 접촉 위치 산출에 이용될 수 있다.
그러면, 단계 S1130에서는 상기 알려져 있는 함수 f(x)와 제1단계 및 제2단계에서 측정된 감지 신호들에 기초하여 각 접촉 입력에 의해 발생한 감지 신호의 강도를 결정할 수 있다. 구체적으로, 제1단계에서 산출된 감지 신호 I1은 접촉 입력 A에 의한 감지 신호와 접촉 입력 B에 대한 감지 신호의 합이므로, 다음 수학식 2로 주어질 수 있다.
수학식 2 
여기서, Sa와 Sb는 각각 접촉 입력 A와 B에 의한 감지 신호의 감도를 나타내며, 접촉 면적에 비례하는 값이다. 한편, a와 b는 각각 접촉 입력 A와 B의 전하 입력단으로부터의 거리 또는 Y좌표를 나타내는 값으로서, 다양한 방식으로 결정될 수 있다. 예를 들어, a와 b는 Y축 감지 전극에서 감지 신호를 검출함으로써 결정될 수도 있다.
유사하게, 제2단계에서 산출된 감지 신호 I2는 다음 수학식 3으로 주어질 수 있다.
수학식 3 
상기 수학식 2와 3을 함께 풀면, 각각의 접촉 입력에 의한 감도 Sa 및 Sb를 구할 수 있으며, 그에 따라 각 접촉 입력이 어느 정도의 감지 신호를 발생시켰는지를 알 수 있다. 결국, 감지 전극에서 접촉 입력이 발생시킨 감지 신호의 강도를 파악하여, 각각의 감지 신호의 정확한 위치를 결정할 수 있다. 여기서 결정되는 위치는 감지 전극의 연장 방향(즉, Y 축 방향)과 교차하는 방향의 위치, 예를 들어, 접촉 입력의 X좌표가 된다.
이상 설명한 방법들은, 구동 회로 및/또는 감지 회로에 의해 수행될 수 있다. 접촉 입력 감지 장치의 구성의 일례를 도 12에 도시하였다. 구동 회로(10)는 X축 감지 전극 및/또는 Y축 감지 전극에 접속되어, 필요에 따라 정해진 시간 동안 전극에 구동 신호를 인가한다. 여기서, 하나의 구동 회로를 도시하였으나, 구동 회로(10)은 전극의 양단에 각각 연결된 2개의 구동 회로를 포함할 수 있다. 또는, 하나의 구동 회로가 전극의 양단에 연결되어 전극의 양단으로부터 별도의 구동을 수행할 수도 있다. 또한, 감지 회로(20)는 X축 감지 전극 및 Y축 감지 전극에 접속되어, 구동 회로(10)에서 인가한 구동 신호에 응답하여 각각의 전극에 대한 감지 신호를 산출한다. 구동 회로(10)와 감지 회로(20)는, 구동 신호의 인가와 감지 신호의 산출이 동기화될 수 있도록 제어부(30)에 의해 제어된다. 이들 구동 회로와 감지 회로는 서로 별개의 회로일 수도 있으며, 하나로 통합된 회로일 수도 있다. 각각의 구동 회로와 감지 회로는 상기한 방법을 수행하기 위한 1 이상의 모듈을 포함할 수 있는데, 이 모듈은 소프트웨어 모듈, 하드웨어 모듈 또는 이들을 결합한 모듈로 구현될 수 있다. 이러한 구동 회로와 감지 회로는, 제어기의 제어 하에서 상기 방법을 수행하도록 동작할 수 있다. 한편, 상술한 구동 회로와 감지 회로 중 하나 또는 둘 모두가 제어기에 포함될 수 있다. 이 경우, 제어기가 집적회로의 형태로 구성되는 것도 가능하다.
또한, 상기 방법들은 프로그램의 형태로 구현되어, 컴퓨터에 의해 수행될 수 있다.
이상 본 발명의 구체적 실시형태들을 참조하여 본 발명을 설명하였으나, 이는 예시에 불과하며 본 발명의 범위를 제한하는 것이 아니다. 당업자는 본 발명의 범위를 벗어나지 않는 범위 내에서 설명된 실시형태들을 변경 또는 변형할 수 있다. 본 명세서에서 설명된 각 기능 블록들 또는 수단들은 전자 회로, 집적 회로, ASIC (Application Specific Integrated Circuit) 등 공지된 다양한 소자들로 구현될 수 있으며, 각각 별개로 구현되거나 2 이상이 하나로 통합되어 구현될 수 있다. 본 명세서 및 청구범위에서 별개인 것으로 설명된 수단 등의 구성요소는 단순히 기능상 구별된 것으로 물리적으로는 하나의 수단으로 구현될 수 있으며, 단일한 것으로 설명된 수단 등의 구성요소도 수개의 구성요소의 결합으로 이루어질 수 있다. 또한 본 명세서에서 설명된 각 방법 단계들은 본 발명의 범위를 벗어나지 않고 그 순서가 변경될 수 있고, 다른 단계가 부가될 수 있다. 뿐만 아니라, 본 명세서에서 설명된 다양한 실시형태들은 각각 독립하여서뿐만 아니라 적절하게 결합되어 구현될 수도 있다. 따라서 본 발명의 범위는 설명된 실시형태가 아니라 첨부된 청구범위 및 그 균등물에 의해 정해져야 한다.
Claims (19)
- 감지 전극을 포함하는 접촉 입력 감지 장치에서 접촉 입력을 감지하는 방법에 있어서,제1 시간 동안 상기 감지 전극의 입력단에서 구동 신호를 공급하고 상기 접촉 입력에 대한 감지 신호를 산출하는 제1단계와,제2 시간 동안 상기 감지 전극의 상기 입력단에서 구동 신호를 공급하고 상기 접촉 입력에 대한 감지 신호를 산출하는 제2단계와,제1단계에서 산출된 감지 신호와 상기 제2단계에서 산출된 감지 신호의 차이에 기초하여 상기 접촉 입력의 위치를 결정하는 제3단계를 포함하되,제1시간과 상기 제2시간은 서로 다른, 접촉 입력 감지 방법.
- 제 1 항에 있어서,상기 감지 전극은 서로 대향하는 두 개의 단부에 각각 입력단이 형성되고,상기 제2단계는 두 개의 입력단에 각각 구동 신호를 공급하여 감지 신호를 산출하는 단계를 포함하는, 접촉 입력 감지 방법.
- 제 1 항에 있어서,상기 접촉 입력 감지 장치는 제1방향으로 연장하는 2 이상의 제 1 감지 전극을 포함하며,상기 제 1 단계 및 상기 제 2 단계는 상기 제 1 감지 전극 각각에 대해 수행되고,상기 제 3 단계는 상기 접촉 입력의 상기 제1방향의 위치를 결정하는 접촉 입력 감지 방법.
- 제 1 항에 있어서,상기 제3단계는 상기 제1단계와 상기 제2단계에서 산출된 감지 신호들의 차이가 더 큰 감지 전극에 대해, 상기 접촉 입력의 상기 제1방향 위치를 상기 구동 신호가 공급된 상기 제1전극의 입력단에서 더 먼 곳으로 결정하는 접촉 입력 감지 방법.
- 제 1 항에 있어서,상기 접촉 입력 감지 장치는 상기 제1방향과 교차하는 제2방향으로 연장하는 2 이상의 제2 감지 전극을 포함하고,상기 방법은,3 시간 동안 상기 제 2 감지 전극 각각에 구동 신호를 공급하고 상기 접촉 입력에 대한 감지 신호를 산출하는 제4단계와,4 시간 동안 상기 제 2 감지 전극 각각의 입력단에서 구동 신호를 공급하고 상기 접촉 입력에 대한 감지 신호를 산출하는 제5단계와,상기 제4단계에서 산출된 감지 신호와 상기 제5단계에서 산출된 감지 신호의 차이에 기초하여 접촉 입력의 상기 제2방향의 위치를 결정하는 제6단계를 포함하되,상기 제 3 시간과 상기 제 4 시간은 서로 상이한, 접촉 입력 감지 방법.
- 제 5 항에 있어서,상기 제2감지 전극은 서로 대향하는 두 개의 단부에 각각 입력단이 형성되고,상기 제5단계는 두 개의 입력단에 각각 구동 신호를 공급하여 상기 접촉 입력에 대한 감지 신호를 산출하는 단계를 포함하는, 접촉 입력 감지 방법.
- 제 5 항에 있어서,상기 제6단계는 상기 제4단계와 상기 제5단계에서 산출된 감지 신호들의 차이가 더 큰 감지 전극에 대해, 상기 접촉 입력의 상기 제2방향 위치를 상기 구동 신호가 공급된 상기 제2전극의 입력단에서 더 먼 곳으로 결정하는 접촉 입력 감지 방법.
- 제 5 항에 있어서,상기 제1단계 또는 상기 제2단계는 상기 감지 신호로부터 접촉 입력의 제2방향 위치를 2 이상 산출하는 단계를 포함하고,상기 제6단계는 상기 2 이상의 산출된 제2방향 위치 중 하나를 선택하는 단계를 포함하는 접촉 입력 감지 방법.
- 제 5 항에 있어서,상기 제4단계 또는 제5단계는 상기 감지 신호로부터 접촉 입력의 제1방향 위치를 2 이상 산출하는 단계를 포함하고,상기 제3단계는 상기 2 이상의 산출된 제1방향 위치 중 하나를 선택하는 단계를 포함하는 접촉 입력 감지 방법.
- 제 3 항에 있어서,상기 제1단계는, 상기 감지 신호로부터 2 이상의 접촉 입력이 있는지 여부를 판정하는 단계를 포함하고,상기 제2단계는 상기 제1단계에서 2 이상의 접촉 감지 전극이 있다고 판정되는 경우에 수행되는 접촉 입력 감지 방법.
- 제 5 항에 있어서,상기 제4단계는, 상기 감지 신호로부터 2 이상의 접촉 입력이 있는지 여부를 판정하는 단계를 포함하고,상기 제5단계는 상기 제4단계에서 2 이상의 접촉 감지 전극이 있다고 판정되는 경우에 수행되는 접촉 입력 감지 방법.
- 제1항에 있어서,상기 제3단계는,상기 접촉 입력에 의해 형성되는 접촉 영역과 상기 입력단 사이의 거리와 상기 감지 신호 사이의 알려진 관계에 더 기초하여 상기 접촉 입력의 위치를 결정하는 접촉 입력 감지 방법.
- 제12항에 있어서,상기 구동 신호는 제1방향으로 전달되도록 인가되고,상기 접촉 입력은 2 이상이며,상기 제3단계는, 상기 접촉 입력의 상기 제1방향과 교차하는 제2방향의 위치를 결정하기 위해, 상기 입력단으로부터 각각의 상기 접촉 입력들까지의 거리에 더 기초하여 상기 접촉 입력들 각각에 의해 생성되는 접촉 면적을 계산하는 단계를 포함하는 접촉 입력 감지 방법.
- 제 1 항 내지 제 13 항 중 어느 한 항에 있어서,상기 구동 신호는 전하를 포함하고,상기 감지 신호는 상기 감지 전극에서 생성되는 정전 용량에 기초하는 접촉 입력 감지 방법.
- 제 14 항에 있어서,상기 제1시간과 상기 제2시간 중 더 짧은 시간은 상기 감지 전극에 형성된 커패시턴스를 일부만 충전하는 시간인 접촉 입력 감지 방법.
- 제 14 항에 있어서,상기 제 3 시간과 상기 제 4 시간 중 더 짧은 시간은 상기 감지 전극에 형성된 커패시턴스를 일부만 충전하는 시간인 접촉 입력 감지 방법.
- 제 1 항 내지 제 13 항 중 어느 한 항에 있어서,상기 감지 신호의 세기에 기초하여 접촉 입력의 개수를 결정하는 단계를 더 포함하는 접촉 입력 감지 방법.
- 감지 전극과, 상기 감지 전극에 구동 신호를 인가하는 구동 회로와, 상기 구동 신호에 응답하여 접촉 입력에 대한 감지 신호를 산출하는 감지 회로, 및 상기 구동 회로와 상기 감지 회로를 제어하는 제어기를 포함하는 접촉 입력 감지 장치에 있어서,상기 제어기는, 상기 구동 회로 및 상기 감지 회로가 제 1 항 내지 제 13 항 중 어느 한 항에 기재된 방법을 수행하도록 제어하는 접촉 입력 감지 장치.
- 구동 회로가 감지 전극에 구동 신호를 인가하도록 제어할 수 있고, 감지 회로가 상기 구동 신호에 응답하여 감시 신호를 산출하도록 제어할 수 있는 제어기에 있어서,상기 제어기는, 상기 구동 회로 및 상기 감지 회로가 제 1 항 내지 제 13 항 중 어느 한 항에 기재된 방법을 수행하도록 제어하는 제어기.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2010-0069075 | 2010-07-16 | ||
| KR1020100069075A KR101696386B1 (ko) | 2009-12-11 | 2010-07-16 | 복수의 접촉 입력을 감지하는 방법 및 장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| WO2012008751A2 true WO2012008751A2 (ko) | 2012-01-19 |
| WO2012008751A3 WO2012008751A3 (ko) | 2012-05-31 |
Family
ID=45470131
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/KR2011/005153 WO2012008751A2 (ko) | 2010-07-16 | 2011-07-13 | 복수의 접촉 입력을 감지하는 방법 및 장치 |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2012008751A2 (ko) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20090014820A (ko) * | 2007-08-07 | 2009-02-11 | 에이디반도체(주) | 다축 터치감지전극라인을 가지는 정전용량센서터치감지전극판, 이를 이용하는 터치스크린 및 터치 패드 |
| KR20090017557A (ko) * | 2006-05-02 | 2009-02-18 | 애플 인크. | 멀티포인트 터치 표면 제어기 |
| KR20090019903A (ko) * | 2006-06-09 | 2009-02-25 | 애플 인크. | 터치 스크린 액정 디스플레이 |
| KR20100004827A (ko) * | 2008-07-04 | 2010-01-13 | 안영수 | 고감도 디지탈방식의 정전용량터치패널장치 |
-
2011
- 2011-07-13 WO PCT/KR2011/005153 patent/WO2012008751A2/ko active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20090017557A (ko) * | 2006-05-02 | 2009-02-18 | 애플 인크. | 멀티포인트 터치 표면 제어기 |
| KR20090019903A (ko) * | 2006-06-09 | 2009-02-25 | 애플 인크. | 터치 스크린 액정 디스플레이 |
| KR20090014820A (ko) * | 2007-08-07 | 2009-02-11 | 에이디반도체(주) | 다축 터치감지전극라인을 가지는 정전용량센서터치감지전극판, 이를 이용하는 터치스크린 및 터치 패드 |
| KR20100004827A (ko) * | 2008-07-04 | 2010-01-13 | 안영수 | 고감도 디지탈방식의 정전용량터치패널장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2012008751A3 (ko) | 2012-05-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2009142453A2 (ko) | 복수의 접촉 입력을 감지하는 방법 및 장치 | |
| US8913017B2 (en) | Touch sensing system, electronic touch apparatus, and touch sensing method | |
| WO2011025170A2 (ko) | 입력 장치 및 입력 장치의 접촉 위치 검출 방법 | |
| CN105531655B (zh) | 翻转的单元传感器图案 | |
| CN104679358B (zh) | 一种终端 | |
| US9886116B2 (en) | Gesture and touch input detection through force sensing | |
| CN103616972B (zh) | 触控屏控制方法及终端设备 | |
| WO2014030804A1 (en) | Display device and method for controlling the same | |
| CN103443731B (zh) | 用于检测到手持式装置的接近的测量装置及方法 | |
| US20130027344A1 (en) | Apparatus Including a Touch-Sensitive Interface Including a Serpentine Electrode Pattern | |
| JP2015049895A (ja) | タッチパネルの入力信号識別方法 | |
| US9471173B2 (en) | Capacitive input sensing in the presence of a uniform conductor | |
| EP2656182A2 (en) | Method and apparatus for providing touch interface | |
| WO2014014316A1 (ko) | 터치 센싱 방법 및 장치 | |
| WO2014014240A1 (ko) | 접촉식 손가락 마우스 및 이의 동작 방법 | |
| WO2019182414A1 (ko) | 터치 입력을 압력 입력으로 결정하기 위한 조건을 변경하는 전자 장치 및 방법 | |
| WO2014104642A1 (ko) | 터치 센싱 장치 및 방법 | |
| WO2010008148A2 (ko) | 움직임을 인식하는 장치 및 방법 | |
| WO2018169209A1 (ko) | 입력 장치, 전자 시스템 및 그 제어 방법 | |
| TWI628417B (zh) | 偵測若干物體的感測器裝置及方法以及具有感測器裝置之電手持裝置 | |
| WO2010110532A2 (ko) | 터치 기능을 구비한 복합 입력장치 | |
| WO2012008751A2 (ko) | 복수의 접촉 입력을 감지하는 방법 및 장치 | |
| KR101696386B1 (ko) | 복수의 접촉 입력을 감지하는 방법 및 장치 | |
| WO2020249526A1 (en) | Touch-sensitive apparatus and method | |
| WO2016006912A1 (ko) | 정전용량 터치패널용 구동 방법 및 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 11807036 Country of ref document: EP Kind code of ref document: A2 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 11807036 Country of ref document: EP Kind code of ref document: A2 |