WO2011122168A1 - Image encoder apparatus, image decoder apparatus, image encoder apparatus control method, image decoder apparatus control method, control programs and recording medium - Google Patents
Image encoder apparatus, image decoder apparatus, image encoder apparatus control method, image decoder apparatus control method, control programs and recording medium Download PDFInfo
- Publication number
- WO2011122168A1 WO2011122168A1 PCT/JP2011/053727 JP2011053727W WO2011122168A1 WO 2011122168 A1 WO2011122168 A1 WO 2011122168A1 JP 2011053727 W JP2011053727 W JP 2011053727W WO 2011122168 A1 WO2011122168 A1 WO 2011122168A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- image
- depth value
- encoding
- depth
- value
- Prior art date
Links
Images







Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/597—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding specially adapted for multi-view video sequence encoding
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/11—Region-based segmentation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/194—Segmentation; Edge detection involving foreground-background segmentation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/10—Processing, recording or transmission of stereoscopic or multi-view image signals
- H04N13/106—Processing image signals
- H04N13/128—Adjusting depth or disparity
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/10—Processing, recording or transmission of stereoscopic or multi-view image signals
- H04N13/194—Transmission of image signals
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10028—Range image; Depth image; 3D point clouds
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/115—Selection of the code volume for a coding unit prior to coding
Definitions
- the present invention relates to an image encoding device, an image decoding device, a control method for an image encoding device, a control method for an image decoding device, a program, and a recording medium that encode a depth image indicating a depth value of the image.
- multi-viewpoint images images from a plurality of viewpoints
- video expression using a plurality of viewpoint images include stereoscopic image display and arbitrary viewpoint image display.
- FIG. 6 is an explanatory diagram showing an overview of stereoscopic image display.
- the two images 501 and 502 with parallax are viewed by the observer in the observer's brain 503 by viewing the image 501 with the left eye and the image 502 with the right eye. It feels as if the objects 504 and 505 in 502 exist three-dimensionally.
- the arbitrary viewpoint image display is to create and display a subject image at an arbitrary viewpoint from a plurality of viewpoint images having different viewpoints and the distance between the camera and the subject in each viewpoint image.
- FIG. 7 is an explanatory diagram showing an overview of arbitrary viewpoint image display.
- images 601v, 602v, and 603v having different viewpoints and depth images 601d, 602d, and 603d that indicate the distance between the camera and the subject in each viewpoint image.
- Images in the example shown in FIG. 7, viewpoint images 604v and 605v
- Non-Patent Document 1 describes a method of generating a viewpoint image (arbitrary viewpoint image) at an arbitrary viewpoint.
- the method described in Non-Patent Document 1 generates an arbitrary viewpoint image using two viewpoint images and depth images corresponding to them. Specifically, (1) the depth image is projected onto the virtual viewpoint, (2) the projected depth image is smoothed, and (3) the pixel value of the actual image is mapped to the smoothed depth image. (4) A method of repairing a pixel at a remaining position by using surrounding pixels. As described above, by using the viewpoint images of the two viewpoints and the depth image thereof, it is possible to generate an image from an arbitrary viewpoint near the viewpoints.
- FIG. 8 is a diagram for explaining a principle that leads to improvement of stereoscopic display by an arbitrary viewpoint image generation technique. As shown in FIG. 8, it is assumed that subjects 704 and 705 are photographed by two cameras 701 and 702 that are installed at a distance of 706 to obtain viewpoint images 701v and 702v.
- the interval 706 is larger than the interval between the left and right eyes of a human (generally about 65 mm), even if the viewpoint image 701v is viewed with the left eye and the viewpoint image 702v is viewed with the right eye, the blurred stereoscopic image Or an image that cannot be seen as a solid at all.
- a viewpoint image 703v in which a subject is viewed at a viewpoint position 703 that is separated from the camera 701 by the same distance 707 as the distance between the left and right eyes of a human is created, and an appropriate stereoscopic image is obtained by using the viewpoint image 701v and the viewpoint image 703v. Can be observed.
- the distance between the two cameras 701 and 702 is too small compared to the distance between the left and right eyes of the human, it corresponds to the distance between the left and right eyes of the human from the point of the camera 701 or the camera 702.
- Patent Document 1 when transmitting depth information, a transmission amount is preferentially assigned to frequency components with high perceptual sensitivity according to temporal and spatial frequency characteristics with respect to visual depth changes. Techniques for encoding depth values are disclosed.
- Patent Document 1 when compressing the information amount of depth information, a viewpoint image generated by using the depth information quality (that is, using the depth information) by assigning a code amount by paying attention to the sensitivity of human depth perception. Quality), while reducing the amount of information.
- Patent Document 1 analyzes the time frequency characteristics and the spatial frequency characteristics of the depth information in order to encode the depth information, the amount of processing increases compared to the method of encoding the depth information as it is. , Processing time will be delayed. In particular, in order to obtain time-frequency characteristics, it is necessary to analyze depth information over a plurality of frames, and a delay of several frames or more is necessarily generated in the processing.
- the present invention has been made in view of the above problems, and an object of the present invention is to realize an image encoding device or the like that encodes a depth value by a simple process with little delay.
- an image encoding device is an image encoding device that encodes a depth value for each unit region in an original image, and a depth value acquisition unit that acquires the depth value.
- Depth value distribution creating means for counting the number of appearances of the depth value obtained by the depth value obtaining means in the image and creating a depth value distribution that is a distribution of the number of appearances for each depth value; and the depth value distribution creating means Based on the shape of the depth value distribution created by the dividing means for dividing the range of the depth value from the minimum value to the maximum value into a plurality of depth values in the depth value distribution, and the depth value included in each section divided by the dividing means
- a code allocating unit that allocates a different code for each section, and the original image is encoded by encoding the depth value with a code allocated by the code allocating unit.
- an output means for outputting the encoded image output from the encoding means and the number of codes used for encoding the encoded image in
- a control method for an image encoding device is a control method for an image encoding device that encodes a depth value for each unit region in an original image, the depth value acquiring step for acquiring the depth value, and The depth value distribution creating step for counting the number of appearances of the depth value obtained in the depth value obtaining step in the image and creating a depth value distribution that is a distribution of the number of appearances for each depth value, and the depth value distribution creating step Based on the shape of the depth value distribution created in step 1, the division step for dividing the range of the depth value in the depth value distribution from the minimum value to the maximum value into a plurality of divisions, and the depth value included in each section divided in the division step On the other hand, a code allocation step in which a different code is assigned to each section, and the depth value is encoded with the code allocated in the code allocation step. Corresponds to the encoding step of encoding the original image and outputting the encoded image, the encoded image output in the encoding step, and the
- the range between the minimum value and the maximum value of the depth value is divided, and the depth value included in each divided section A different code is assigned to each section, and the original image is encoded.
- the depth value can be encoded while maintaining the shape characteristic of the distribution of the number of occurrences of the depth value in one original image, so that the image feature can be maintained.
- the original image can be encoded by a simple process.
- the encoded depth value is determined for the image as in the case of encoding the depth value using a plurality of images. It is possible to prevent delay.
- the dividing unit uses the number of local maximum values of the number of appearances in the depth value distribution created by the depth value distribution creating unit, and is greater than or equal to the minimum value of the depth value in the depth value distribution. It is preferable to determine the number to divide the range below the value.
- the number of divisions of the range from the minimum value of the depth value to the maximum value is determined using the maximum number of occurrences in the depth value distribution. Since the number of local maximum values characterizes the shape of the depth value distribution, by determining the number to be divided using the number of local maximum values, the shape of the distribution of depth values after encoding is encoded. It can be approximated to the shape of the distribution of depth values before conversion.
- the number of divisions of the range between the minimum value and the maximum value of the depth value using the number of local maximum values for example, the number obtained by adding the number of local maximum values and the number between local maximum values is divided. It is mentioned to make it the number to do. As a result, it is possible to represent the maximum value and the depth value therebetween, and it is possible to encode the depth value while maintaining the shape of the distribution of the appearance number of the depth value.
- the assigning means assigns different codes to the maximum value and the minimum value of the depth value in a range of the depth value in the depth value distribution that is not less than the minimum value and not more than the maximum value, A different code may be assigned to each section obtained by dividing the remaining range excluding the maximum value and the minimum value.
- different codes are assigned to the maximum value and the minimum value of the depth value, and different codes are assigned to each section obtained by dividing the remaining range excluding the maximum value and the minimum value. Therefore, the number of appearances of the maximum value and the minimum value of the depth value does not change before and after encoding.
- the maximum value and the minimum value of the depth value indicate the farthest subject and the closest subject in the image. Therefore, since the number of occurrences of the maximum value and the minimum value of the depth value does not change by encoding, the area occupied by the farthest subject and the nearest subject in the image can be kept unchanged, and the image characteristics are not impaired. Can be encoded.
- the dividing unit has a maximum value of the number of occurrences of the depth value as a starting point in a range of the depth value distribution in the depth value distribution that is not less than the minimum value and not more than the maximum value.
- the inclination of the depth value distribution may be obtained, and a predetermined range with a large inclination of the depth value distribution may be divided more than a predetermined range with a small inclination of the depth value distribution.
- the dividing unit obtains the inclination for each predetermined range in the depth value distribution, and divides the predetermined range with the large inclination more than the predetermined range with the small inclination, so that the appearance of the depth value
- the number of codes to be assigned can be increased for a range in which the number is changing rapidly, and the number of codes to be assigned can be reduced for a range in which the number of occurrences of depth values has not changed much.
- encoding can be performed with a smaller number of codes without impairing the perspective of the image.
- the original image is a moving image
- the output means includes the number of codes used for encoding the encoded image output from the encoding means, and the encoded image. A difference from the number of codes of the code used for encoding the encoded image output by the encoding means immediately before the output may be output.
- the output unit includes the number of codes used for encoding the encoded image output from the encoding unit and the encoded image output from the encoding unit immediately before the encoded image.
- the difference from the code number of the code used for encoding is output.
- the information indicating the difference has a smaller information amount than the information indicating the number of codes. Therefore, it is possible to output information indicating the number of codes used for encoding the encoded image with a smaller amount of information.
- an image decoding apparatus acquires an encoded image obtained by encoding an original image and a code number that is the number of codes used for encoding the encoded image. And a conversion ratio that is a ratio between the number of codes acquired by the acquisition unit and the number of gradations for expressing the depth value of the original image, and the calculated conversion ratio of the encoded image acquired by the acquisition unit And decoding means for decoding the encoded image by multiplying the depth value.
- control method of the image decoding device includes an acquisition step of acquiring an encoded image obtained by encoding an original image and a code number that is the number of codes used for encoding the encoded image; A conversion ratio that is a ratio between the number of codes acquired in the acquisition step and the number of gradations for expressing the depth value of the original image is obtained, and the obtained conversion ratio is used as the depth value of the encoded image acquired in the acquisition step. And a decoding step of decoding the encoded image by multiplication.
- the encoded image for the depth value of the encoded image, conversion that is a ratio between the number of codes encoded in the encoded image and the number of gradations for expressing the depth value of the original image Since the depth value of the encoded image is decoded by multiplying by the ratio, the encoded image can be decoded to the original image of the depth value expressed by the number of gradations to be expressed.
- the image encoding device and the image decoding device may be realized by a computer.
- An apparatus control program, an image decoding apparatus control program for realizing the image decoding apparatus by a computer, and a computer-readable recording medium on which at least one of them is recorded also fall within the scope of the present invention.
- the image coding apparatus uses the depth value acquisition unit that acquires the depth value for each unit region in the original image, and the appearance number of the depth value acquired by the depth value acquisition unit in the image.
- a depth value distribution creating unit that counts and creates a depth value distribution that is a distribution of the number of appearances for each depth value, and a depth value in the depth value distribution based on the shape of the depth value distribution created by the depth value distribution creating unit.
- a dividing unit that divides a range between the minimum value and the maximum value into a plurality of values, a code allocating unit that assigns a different code to each of the depth values included in each section divided by the dividing unit, and the code allocating unit Encoding the depth value with the code assigned by the encoding means for encoding the original image and outputting the encoded image; and the encoded image output by the encoding means A configuration that includes an output means for outputting in association with the number code and the number of codes used in coding the coded image.
- the image encoding device control method includes a depth value acquisition step of acquiring a depth value for each unit region in the original image, and the number of appearances of the depth value acquired in the depth value acquisition step in the image.
- a depth value distribution creating step for counting and creating a depth value distribution that is a distribution of the number of appearances for each depth value, and a depth value in the depth value distribution based on the shape of the depth value distribution created in the depth value distribution creating step.
- a division step for dividing a range from the minimum value to the maximum value into a plurality, a code assignment step for assigning a different code for each section to the depth value included in each section divided in the division step, and the code assignment step An encoding step of encoding the original image by encoding the depth value with the code assigned in step 1 and outputting the encoded image; , The method comprising the coded image output by the encoding step, an output step of outputting in association the number of codes and the number of codes used in coding the coded image.
- the depth value can be encoded while maintaining the shape characteristic of the distribution of the number of occurrences of the depth value in one original image, so that the image feature can be maintained. Further, since the distribution of the number of appearances of depth values is divided and a code is assigned to each divided section, the original image can be encoded by a simple process.
- the encoded depth value is determined for the image as in the case of encoding the depth value using a plurality of images. There is an effect that the delay can be prevented.
- the image decoding apparatus includes an acquisition unit that acquires an encoded image obtained by encoding an original image, and a code number that is the number of codes used for encoding the encoded image, and the acquisition unit includes: By obtaining a conversion ratio that is a ratio between the acquired number of codes and the number of gradations for expressing the depth value of the original image, and multiplying the obtained conversion ratio by the depth value of the encoded image acquired by the acquisition means And a decoding means for decoding the encoded image.
- control method of the image decoding device includes an acquisition step of acquiring an encoded image obtained by encoding an original image and a code number that is the number of codes used for encoding the encoded image; A conversion ratio that is a ratio between the number of codes acquired in the acquisition step and the number of gradations for expressing the depth value of the original image is obtained, and the obtained conversion ratio is used as the depth value of the encoded image acquired by the acquisition unit. And a decoding step of decoding the encoded image by multiplication.
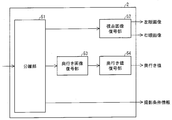
- FIG. 1 illustrates an embodiment of the present invention and is a block diagram illustrating a main configuration of an image encoding device. It is a figure for demonstrating the process in the depth value analysis part of the said image coding apparatus. It is a flowchart which shows the flow of a process of the said image coding apparatus. 1, showing an embodiment of the present invention, is a block diagram illustrating a main configuration of an image decoding device. FIG. It is a figure for demonstrating the restoration method of the depth value in the depth value decoding part of the said image decoding apparatus. It is explanatory drawing which shows the outline
- FIGS. 1 to 5 An embodiment of the present invention will be described with reference to FIGS. 1 to 5 as follows.
- FIG. 1 is a block diagram showing a main configuration of an image encoding device 1 according to the present embodiment.
- the image encoding device 1 is a device that performs encoding processing on a plurality of viewpoint images (for example, an image for the right eye and an image for the left eye) and a corresponding depth value to reduce the amount of information and transmits the image.
- the right-eye image is an image assumed to be viewed by the observer with the right eye
- the left-eye image is an image assumed to be viewed by the observer with the left eye.
- the image encoding device 1 includes a depth value encoding unit 10, a viewpoint image acquisition unit 11, a viewpoint image encoding unit 12, a depth calculation unit 13, a depth image encoding unit 16, and acquisition of shooting condition information.
- the configuration includes a unit 17 and a multiplexing unit 18.
- the depth value encoding unit 10 includes a depth value analysis unit (depth value acquisition unit, depth value distribution generation unit, division unit, code allocation unit) 14 and a depth value conversion unit (encoding unit, output unit) 15. It is a configuration.
- the viewpoint image acquisition unit 11 acquires viewpoint images such as a right eye image and a left eye image, and transmits the viewpoint images to the viewpoint image encoding unit 12 and the depth calculation unit 13. Note that the viewpoint image acquired by the viewpoint image acquisition unit 11 may be a moving image or a still image.
- the viewpoint image encoding unit 12 compresses and encodes the acquired viewpoint image based on a predetermined encoding method.
- the encoding method include JPEG (Joint ⁇ Photographic Experts Group) and JPEG2000 if the viewpoint image is a still image. If the viewpoint image is a moving image, MPEG (Moving Picture Experts Group) -2, MPEG-4, AVC (Advanced Video Coding) / H. H.264 or the like can be cited.
- the depth calculation unit 13 calculates a depth value from the right eye image and the left eye image acquired from the viewpoint image acquisition unit 11. Then, the calculated depth value is transmitted to the depth value encoding unit 10.
- the depth value calculated by the depth calculation unit 13 is expressed as a depth image (original image) having 8-bit luminance information. Note that the number of bits representing the depth value is not limited to 8 bits.
- the movement amount of each corresponding pixel is obtained using block matching for the right-eye image and the left-eye image, and the depth value is calculated from the obtained movement amount.
- a method can be mentioned.
- the depth value does not have to be calculated for each pixel, but may be calculated with a plurality of pixels as one unit.
- the depth value may be measured using a distance measuring camera.
- a distance measurement camera is a camera that can measure the distance to a subject, for example, by irradiating an infrared ray toward the subject and measuring the time until the ray is reflected back. The distance from the camera to the subject is estimated.
- the depth image is an image in which the distance (depth value) between the camera and the subject is configured by luminance information for each unit region (for example, pixel).
- the depth value encoding unit 10 encodes the depth value acquired from the depth calculation unit 13. Specifically, the depth value analysis unit 14 analyzes the distribution state of the luminance value that is the acquired depth value, and divides the range of the minimum value and maximum value of the analyzed depth value distribution into a plurality of values. A different code is assigned to each divided section. Then, the depth value included in each divided section and the code assigned to each section are transmitted to the depth value conversion unit 15. Details of the depth value analysis will be described later.
- the depth value conversion unit 15 encodes the depth value included in each section with the assigned code from the acquired depth value included in each section and the assigned code. Then, the encoded depth value that is the depth value after encoding and the depth depth information that is the information indicating the number of codes that are assigned are transmitted to the depth image encoding unit 16. Specifically, when the encoded depth value is represented by 3 bits, the depth depth information is “3”, and the number of codes that is the number of assigned code types is the number of gradations that can be represented by 3 bits. “8”. Details of the encoding of the depth value and the depth depth information will be described later.
- the depth image encoding unit 16 compresses and encodes the acquired encoded depth value.
- the encoded depth value can be expressed as an image because the luminance value is encoded. Therefore, the depth image encoding unit 16 can further compress and encode the encoded depth value by an encoding method similar to the encoding method in the viewpoint image encoding unit 12 described above.
- the viewpoint image acquired by the viewpoint image acquisition unit 11 is a moving image
- the following encoding method may be employed.
- the viewpoint image is a moving image
- the depth value changes in units of frames, and therefore depth depth information indicating the number of codes assigned to the depth values also changes in units of frames. Therefore, the difference between the depth and depth information in the immediately preceding frame is taken and encoded.
- the code amount can be further reduced by generating an optimum code such as a Huffman code based on this property.
- the imaging condition information acquisition unit 17 acquires the imaging condition information of the viewpoint image and transmits it to the multiplexing unit 18.
- the imaging condition information includes the distance between the camera that has captured the right-eye image and the camera that has captured the left-eye image, the imaging direction (angle) of each camera, the focal length of each camera, and the like.
- the multiplexing unit 18 multiplexes the encoded viewpoint image acquired from the viewpoint image encoding unit 12, the encoded depth value and depth depth information acquired from the depth image encoding unit 16, and shooting condition information. To an external decoding device.
- FIG. 2 is a diagram for explaining processing in the depth value analysis unit 14.
- the depth value is determined for each subject in the viewpoint image.
- the viewpoint image is composed of luminance information of 8 bits for each pixel and two kinds of color difference information of 8 bits for each pixel.
- the depth image is composed of 8-bit luminance information for each pixel.
- the depth value analysis unit 14 counts the number of appearances for each luminance value indicating the depth value in the depth image of FIG.
- the depth value distribution which is the result of counting, is the depth information in which the horizontal axis is the depth value and the vertical axis is the number of appearances. It can be expressed as a diagram (histogram) shown.
- FIG. 2C it can be seen that the distribution of depth values is distributed with the number of appearances biased to a specific value. Therefore, even if the depth value originally expressed by 8 bits (256 gradations) is expressed by gradations smaller than 256 gradations, the feature of the shape of the depth value distribution can be maintained. Therefore, the depth value analysis unit 14 determines gradations less than 256 gradations that can maintain the shape characteristics of the depth value distribution, and divides the depth value distribution into the number of gradations. A different code is assigned to each divided section.
- the region between them is expressed in three gradations corresponding to the number of maximum values. It is determined that the depth value can be expressed with 5 gradations including gradations. Then, 3 is determined as the minimum number of bits that can represent five gradations as the number of bits that represent the depth value. The determined bit number is used as depth / depth information. Then, the depth value distribution is divided so that the depth value can be expressed with 8 gradations that the determined number of bits 3 can take.
- the range of the minimum value 0 to the maximum value 255 of the depth value expressed in 8 bits is equally divided into 8 sections that are the number of gradations that can be expressed in 3 bits, and the minimum value 0 that can be expressed in 3 bits. To the maximum value 7 in order.
- the depth value conversion unit 15 encodes the depth value into the assigned code.
- the depth image in which the number of bits representing the depth value is reduced has a rough intermediate gradation, but the foreground person 201, the middle-distance house 202, and the distant mountain range 203, which are the main parts of the image, are empty.
- the relationship between the depth values of the respective areas 204 the relationship before reducing the number of bits can be maintained. Therefore, the perspective distortion in the image can be reduced.
- a method other than dividing the 256 gradations equally into 8 may be used. For example, a minimum value 0 and a maximum value 7 of 3 bits are assigned as codes to a minimum value 0 and a maximum value 255 of depth values expressed in 8 bits. Then, the remaining range of depth values 1 to 254 are equally divided, and the remaining values 1 to 6 of 3 bits are assigned as codes in ascending order. According to this method, the depth value before conversion is particularly concentrated on the minimum and maximum values, or the frequency of appearance of the minimum and maximum values is extremely different from the frequency of appearance of adjacent depth values. Thus, by using only separate codes for the minimum value and the maximum value, the perspective relationship with the adjacent sections can be accurately maintained, and the perspective distortion in the image can be further suppressed.
- the depth values 0 to 255 or 1 to 254 expressed in 8 bits are not evenly assigned to the 3-bit values, but more in areas where the change in appearance frequency is large according to the distribution of depth values. May be assigned.
- the slope of the histogram is calculated for each fixed section starting from the local maximum value, and many values are assigned to sections with a large slope, that is, sections with a large change in depth value, and are assigned to sections with a small slope, that is, sections with a small change in depth value. Assigns fewer values.
- the depth value converting unit 15 can express the depth value expressed in 8 bits as 3 bits, and the information amount per depth value can be reduced by 5 bits. Then, the depth value conversion unit 15 transmits the depth value obtained by reducing the number of bits and the depth depth information indicating the number of bits after the reduction.
- the image encoding device 1 is connected to a recording device or a network control device not shown in FIG. 1, and the encoded data multiplexed by the multiplexing unit 18 is a magnetic disk, an optical disk, or a semiconductor memory. It may be stored in a recording medium such as, or may be transmitted to a remote receiving device via a network.
- FIG. 3 is a flowchart showing a process flow of the image encoding device 1.
- the viewpoint image acquisition unit 11 acquires a viewpoint image (S1).
- the depth calculation unit 13 calculates the depth value of the viewpoint image acquired by the viewpoint image acquisition unit 11 (S2, depth value acquisition step).
- the depth value analysis unit 14 analyzes the depth value calculated by the depth calculation unit 13 and obtains a distribution of depth values (S3, depth value distribution creation step).
- the number of bits representing the depth value is determined from the distribution of depth values (S4, division step, code allocation step).
- the depth value conversion unit 15 converts the depth value so as to be expressed by the number of bits determined by the depth value analysis unit 14 (S5, encoding step, output step).
- the depth image encoding unit 16 further compresses and encodes the converted depth value and the like (S6), and the multiplexing unit 18 encodes the encoded depth value, the encoded viewpoint image that is encoded separately,
- the imaging condition information is multiplexed (S7) and transmitted to other devices.
- the process of the image coding apparatus 1 is complete
- FIG. 4 is a block diagram illustrating a main configuration of the image decoding device 2.
- the image decoding device 2 performs a decoding process on the encoded data transmitted from the image encoding device 1 via a recording medium or a network (not shown), depth information corresponding to a plurality of viewpoint images and viewpoint images, This is a device for restoring shooting condition information and the like.
- the separation unit 51 acquires encoded data and separates it into encoded data of viewpoint images, encoded data of depth values, and shooting condition information. Then, the encoded data of the separated viewpoint image is transmitted to the viewpoint image decoding unit 52, and the encoded data of the depth value is transmitted to the depth image decoding unit 53.
- the viewpoint image decoding unit 52 decodes the acquired encoded data of the viewpoint image based on a corresponding method, and transmits the decoded viewpoint images (right-eye image and left-eye image).
- the depth image decoding unit 53 decodes the encoded data of the acquired depth value and transmits the depth value and the depth depth information to the depth value decoding unit 54.
- Depth value decoding unit (acquisition means, decoding means) 54 uses the acquired depth depth information to decode (restore) the acquired depth value into a depth value before conversion.
- decoding in the depth value decoding unit 54 is referred to as restoration in order to distinguish it from decoding in the depth image decoding unit 53. Details of the restoration will be described later.
- the depth value decoding unit 54 adds the depth image to the depth / depth information in the immediately preceding frame.
- the difference value decoded by the decoding unit 53 may be added to obtain depth / depth information of the current frame.
- FIG. 5 is a diagram for explaining a depth value restoration method in the depth value decoding unit 54.
- the depth value is expressed by 8 bits, and when expressed as an image, the depth value is as shown in FIG.
- the number of bits to be expressed is reduced to 3 bits and restored so as to be expressed again with 8 bits, it is restored using the reduced number of bits.
- the depth value represented by 3 bits is restored by multiplying each depth value by the number of gradations 32 that can be represented by 5 bits, so that the depth value represented by 3 bits can be represented by 8 bits.
- the 8-bit minimum value 0 and the maximum value 255 are assigned to the minimum value 0 and the maximum value 7 of the depth value, and the 8-bit minimum value is assigned to the remaining depth values 1 to 6 expressed in 3 bits.
- 254 gradations excluding the maximum value may be equally restored by multiplying by 42, which is a quotient of 254/6.
- the image represented by the restored depth value has a medium gradation, that is, the resolution of expression is rough.
- the main part of the image almost reproduces the perspective before the bit number reduction. can do. Therefore, the perspective distortion in the image can be reduced.
- the restored depth value can be used to generate an image of an arbitrary viewpoint from a plurality of viewpoint images, or to adjust a stereoscopic effect when displayed as a stereoscopic image.
- the depth value corresponding to the viewpoint image is encoded so as to reduce the expression resolution, while the expression resolution of the viewpoint image is maintained and encoded.
- the depth value can be encoded and the amount of data can be reduced without affecting the quality of the image itself.
- the image encoding apparatus is an image encoding apparatus that encodes a depth value for each unit region in an original image, and includes a depth value acquisition unit that acquires the depth value, and the depth.
- a depth value distribution creating unit that counts the number of appearances of the depth value acquired by the value acquisition unit in the image and creates a depth value distribution, which is a distribution of the number of appearances for each depth value, and the depth value distribution creating unit Based on the shape of the depth value distribution, a dividing unit that divides a range between the minimum value and the maximum value of the depth value in the depth value distribution into a plurality of sections, and for the depth value included in each section divided by the dividing unit, A code allocating unit for allocating a different code for each code, and a code for encoding the original image by encoding the depth value with the code allocated by the code allocating unit and outputting the encoded image.
- a control method for an image encoding device is a control method for an image encoding device that encodes a depth value for each unit region in an original image, the depth value acquiring step for acquiring the depth value, and The depth value distribution creating step for counting the number of appearances of the depth value obtained in the depth value obtaining step in the image and creating a depth value distribution that is a distribution of the number of appearances for each depth value, and the depth value distribution creating step Based on the shape of the depth value distribution created in step 1, the division step for dividing the range of the depth value in the depth value distribution from the minimum value to the maximum value into a plurality of divisions, and the depth value included in each section divided in the division step On the other hand, a code allocation step in which a different code is assigned to each section, and the depth value is encoded with the code allocated in the code allocation step. Corresponds to the encoding step of encoding the original image and outputting the encoded image, the encoded image output in the encoding step, and the
- the range between the minimum value and the maximum value of the depth value is divided, and the depth value included in each divided section A different code is assigned to each section, and the original image is encoded.
- the depth value can be encoded while maintaining the shape characteristic of the distribution of the number of occurrences of the depth value in one original image, so that the image feature can be maintained.
- the original image can be encoded by a simple process.
- the encoded depth value is determined for the image as in the case of encoding the depth value using a plurality of images. It is possible to prevent delay.
- the dividing unit uses the number of local maximum values of the number of appearances in the depth value distribution created by the depth value distribution creating unit, and is greater than or equal to the minimum value of the depth value in the depth value distribution. It is preferable to determine the number to divide the range below the value.
- the number of divisions of the range from the minimum value of the depth value to the maximum value is determined using the maximum number of occurrences in the depth value distribution. Since the number of local maximum values characterizes the shape of the depth value distribution, by determining the number to be divided using the number of local maximum values, the shape of the distribution of depth values after encoding is encoded. It can be approximated to the shape of the distribution of depth values before conversion.
- the assigning means assigns different codes to the maximum value and the minimum value of the depth value in a range of the depth value in the depth value distribution that is not less than the minimum value and not more than the maximum value, A different code may be assigned to each section obtained by dividing the remaining range excluding the maximum value and the minimum value.
- different codes are assigned to the maximum value and the minimum value of the depth value, and different codes are assigned to each section obtained by dividing the remaining range excluding the maximum value and the minimum value. Therefore, the number of appearances of the maximum value and the minimum value of the depth value does not change before and after encoding.
- the maximum value and the minimum value of the depth value indicate the farthest subject and the closest subject in the image. Therefore, since the number of occurrences of the maximum value and the minimum value of the depth value does not change by encoding, the area occupied by the farthest subject and the nearest subject in the image can be kept unchanged, and the image characteristics are not impaired. Can be encoded.
- the dividing unit has a maximum value of the number of occurrences of the depth value as a starting point in a range of the depth value distribution in the depth value distribution that is not less than the minimum value and not more than the maximum value.
- the inclination of the depth value distribution may be obtained, and a predetermined range with a large inclination of the depth value distribution may be divided more than a predetermined range with a small inclination of the depth value distribution.
- the dividing unit obtains the inclination for each predetermined range in the depth value distribution, and divides the predetermined range with the large inclination more than the predetermined range with the small inclination, so that the appearance of the depth value
- the number of codes to be assigned can be increased for a range in which the number is changing rapidly, and the number of codes to be assigned can be reduced for a range in which the number of occurrences of depth values has not changed much.
- encoding can be performed with a smaller number of codes without impairing the perspective of the image.
- the original image is a moving image
- the output means includes the number of codes used for encoding the encoded image output from the encoding means, and the encoded image. A difference from the number of codes of the code used for encoding the encoded image output by the encoding means immediately before the output may be output.
- the output unit includes the number of codes used for encoding the encoded image output from the encoding unit and the encoded image output from the encoding unit immediately before the encoded image.
- the difference from the code number of the code used for encoding is output.
- the information indicating the difference has a smaller information amount than the information indicating the number of codes. Therefore, it is possible to output information indicating the number of codes used for encoding the encoded image with a smaller amount of information.
- an image decoding apparatus acquires an encoded image obtained by encoding an original image and a code number that is the number of codes used for encoding the encoded image. And a conversion ratio that is a ratio between the number of codes acquired by the acquisition unit and the number of gradations for expressing the depth value of the original image, and the calculated conversion ratio of the encoded image acquired by the acquisition unit And decoding means for decoding the encoded image by multiplying the depth value.
- control method of the image decoding device includes an acquisition step of acquiring an encoded image obtained by encoding an original image and a code number that is the number of codes used for encoding the encoded image; A conversion ratio that is a ratio between the number of codes acquired in the acquisition step and the number of gradations for expressing the depth value of the original image is obtained, and the obtained conversion ratio is used as the depth value of the encoded image acquired in the acquisition step. And a decoding step of decoding the encoded image by multiplication.
- the encoded image for the depth value of the encoded image, conversion that is a ratio between the number of codes encoded in the encoded image and the number of gradations for expressing the depth value of the original image Since the depth value of the encoded image is decoded by multiplying by the ratio, the encoded image can be decoded to the original image of the depth value expressed by the number of gradations to be expressed.
- the image encoding device and the image decoding device may be realized by a computer.
- An apparatus control program, an image decoding apparatus control program for realizing the image decoding apparatus by a computer, and a computer-readable recording medium on which at least one of them is recorded also fall within the scope of the present invention.
- each block of the image encoding device 1 and the image decoding device 2 particularly the viewpoint image acquisition unit 11, the viewpoint image encoding unit 12, the depth calculation unit 13, the depth value analysis unit 14, the depth value conversion unit 15, the depth image
- the encoding unit 16, the imaging condition information acquisition unit 17, the multiplexing unit 18, the separation unit 51, the viewpoint image decoding unit 52, the depth image decoding unit 53, and the depth value decoding unit 54 are formed on an integrated circuit (IC chip). It may be realized in hardware by a logic circuit that has been implemented, or may be realized in software using a CPU (central processing unit).
- the image encoding device 1 and the image decoding device 2 include a CPU that executes instructions of a control program that realizes each function, a ROM (read only memory) that stores the program, and a RAM (random) that expands the program. access memory), a storage device (recording medium) such as a memory for storing the program and various data.
- An object of the present invention is to enable a computer to read program codes (execution format program, intermediate code program, source program) of control programs for the image encoding device 1 and the image decoding device 2, which are software that realizes the functions described above. Is supplied to the image encoding device 1 and the image decoding device 2, and the computer (or CPU or MPU (microprocessor unit)) reads and executes the program code recorded on the recording medium. Can also be achieved.
- the recording medium examples include tapes such as a magnetic tape and a cassette tape, a magnetic disk such as a floppy (registered trademark) disk / hard disk, a CD-ROM (compact disk-read-only memory) / MO (magneto-optical) / Discs including optical discs such as MD (Mini Disc) / DVD (digital versatile disc) / CD-R (CD Recordable), IC cards (including memory cards) / optical cards, mask ROM / EPROM (erasable) Programmable read-only memory) / EEPROM (electrically erasable and programmable read-only memory) / semiconductor memory such as flash ROM, or logic circuits such as PLD (Programmable logic device) and FPGA (Field Programmable Gate Array) be able to.
- a magnetic disk such as a floppy (registered trademark) disk / hard disk
- the image encoding device 1 and the image decoding device 2 may be configured to be connectable to a communication network, and the program code may be supplied via the communication network.
- the communication network is not particularly limited as long as it can transmit the program code.
- Internet intranet, extranet, LAN (local area network), ISDN (integrated area services digital area), VAN (value-added area network), CATV (community area antenna television) communication network, virtual area private network (virtual area private network), A telephone line network, a mobile communication network, a satellite communication network, etc. can be used.
- the transmission medium constituting the communication network may be any medium that can transmit the program code, and is not limited to a specific configuration or type.
- IEEE institute of electrical and electronic engineers 1394, USB, power line carrier, cable TV line, telephone line, ADSL (asynchronous digital subscriber loop) line, etc. wired such as IrDA (infrared data association) or remote control , Bluetooth (registered trademark), IEEE802.11 wireless, HDR (high data rate), NFC (Near field communication), DLNA (Digital Living Network Alliance), mobile phone network, satellite line, terrestrial digital network, etc.
- IrDA infrared data association
- Bluetooth registered trademark
- IEEE802.11 wireless wireless
- HDR high data rate
- NFC Near field communication
- DLNA Digital Living Network Alliance
- mobile phone network satellite line, terrestrial digital network, etc.
- the present invention can also be realized in the form of a computer data signal embedded in a carrier wave in which the program code is embodied by electronic transmission.
- Depth values corresponding to viewpoint images can be compressed with simple processing with little delay, so devices that send image data to devices that process images using depth values, such as stereoscopic images and images at arbitrary viewpoints, are created It is suitable for an apparatus that transmits image data to an apparatus that performs such processing.
Abstract
There are included a depth value analyzing unit (14) that acquires a depth value for each of a plurality of unit areas in an original image, counts the number of occurrences of the acquired depth values in the original image, creates a depth value distribution that is a distribution of the number of occurrences for each depth value, divides, based on the shape of the created depth value distribution, the range from the minimum value to the maximum value of the depth values in the depth value distribution into a plurality of sections, and assigns, to the depth values included in the divisional sections, codes that are different on a section-by-section basis; and a depth value converting unit (15) that uses the codes, which are assigned by the depth value analyzing unit (14), to encode the depth values, thereby encoding the original image and that outputs the encoded image with the encoded image being associated with a number of codes that is the number of codes used for the encoding of the encoded image. In this way, the depth values can be encoded only from one original image, so that the depth values can be encoded with less delay and by use of a simple process.
Description
本発明は、画像の奥行き値を示す奥行き画像を符号化する画像符号化装置、画像復号装置、画像符号化装置の制御方法、画像復号装置の制御方法、プログラムおよび記録媒体に関するものである。
The present invention relates to an image encoding device, an image decoding device, a control method for an image encoding device, a control method for an image decoding device, a program, and a recording medium that encode a depth image indicating a depth value of the image.
近年、複数の視点からの画像(複数視点画像)を用いることにより、1視点方向からの画像である単一視点画像のみでは得ることのできない臨場感の高い映像表現が実現されている。複数視点画像を用いた映像表現としては、例えば、立体画像表示や任意視点画像表示が挙げられる。
Recently, by using images from a plurality of viewpoints (multi-viewpoint images), a highly realistic video expression that cannot be obtained only by a single viewpoint image that is an image from one viewpoint direction has been realized. Examples of video expression using a plurality of viewpoint images include stereoscopic image display and arbitrary viewpoint image display.
立体画像表示は、視差のある2つの画像を用い、観察者が右眼で一方の画像を左眼で他方の画像を見ることにより、それぞれの画像は平面画像であるにもかかわらず、観察者の脳内ではあたかも立体的な三次元空間を見ているような感覚を与えるものである。具体的に図6を用いて説明する。図6は、立体画像表示の概要を示す説明図である。図6に示すように、視差のある2つ画像501、502に対し、観察者は左眼で画像501を、右眼で画像502を見ることにより、観察者の脳内503では、画像501、502内の物体504、505が立体的に存在しているように感じられる。
Stereoscopic image display uses two images with parallax, and the observer views one image with the right eye and the other image with the left eye, so that each image is a planar image, but the observer In the brain, it gives the feeling of looking at a three-dimensional space. This will be specifically described with reference to FIG. FIG. 6 is an explanatory diagram showing an overview of stereoscopic image display. As shown in FIG. 6, the two images 501 and 502 with parallax are viewed by the observer in the observer's brain 503 by viewing the image 501 with the left eye and the image 502 with the right eye. It feels as if the objects 504 and 505 in 502 exist three-dimensionally.
また、任意視点画像表示は、視点の異なる複数の視点画像およびそれぞれの視点画像におけるカメラと被写体との距離から、任意の視点における被写体の画像を作成し、表示するものである。具体的に図7を用いて説明する。図7は、任意視点画像表示の概要を示す説明図である。図7に示すように、視点の異なる複数の視点画像601v、602v、603vと、それぞれの視点画像におけるカメラと被写体との距離を示す奥行き画像601d、602d、603dとから、任意の視点における被写体の画像(図7に示す例では、視点画像604v、605v)を作成し、表示する。これにより、撮影していない視点からの被写体の画像を表示させることができる。
Also, the arbitrary viewpoint image display is to create and display a subject image at an arbitrary viewpoint from a plurality of viewpoint images having different viewpoints and the distance between the camera and the subject in each viewpoint image. This will be specifically described with reference to FIG. FIG. 7 is an explanatory diagram showing an overview of arbitrary viewpoint image display. As shown in FIG. 7, from a plurality of viewpoint images 601v, 602v, and 603v having different viewpoints and depth images 601d, 602d, and 603d that indicate the distance between the camera and the subject in each viewpoint image, Images (in the example shown in FIG. 7, viewpoint images 604v and 605v) are created and displayed. Thereby, it is possible to display an image of a subject from a viewpoint that has not been shot.
非特許文献1に、任意の視点における視点画像(任意視点画像)を生成する方法が記載されている。非特許文献1に記載の方法は、2つの視点画像、およびこれらに対応する奥行き画像を利用して任意視点画像を生成するものである。具体的には、(1)仮想視点に対して奥行き画像を投影し、(2)投影した奥行き画像を平滑化し、(3)平滑化した奥行き画像に対して、実画像の画素値をマッピングし、(4)残った位置の画素を周囲の画素を利用して修復する、という方法である。このように、2視点の視点画像とその奥行き画像を利用することで、それら視点の近傍にある任意視点からの画像を生成することが可能となる。
Non-Patent Document 1 describes a method of generating a viewpoint image (arbitrary viewpoint image) at an arbitrary viewpoint. The method described in Non-Patent Document 1 generates an arbitrary viewpoint image using two viewpoint images and depth images corresponding to them. Specifically, (1) the depth image is projected onto the virtual viewpoint, (2) the projected depth image is smoothed, and (3) the pixel value of the actual image is mapped to the smoothed depth image. (4) A method of repairing a pixel at a remaining position by using surrounding pixels. As described above, by using the viewpoint images of the two viewpoints and the depth image thereof, it is possible to generate an image from an arbitrary viewpoint near the viewpoints.
また、任意視点画像の生成技術を用いることにより、上述した立体画像表示の改善につながる。図8を用いて説明する。図8は、任意視点画像の生成技術により立体表示の改善につながる原理を説明するための図である。図8に示すように、間隔706だけ離れて設置されている2つのカメラ701、702で被写体704、705を撮影し、視点画像701v、702vを得たとする。そして、間隔706が人間の左右の眼の間隔(一般的に約65mm)よりも大きい場合、視点画像701vを左の眼で、視点画像702vを右の眼で見たとしても、ぼやけた立体画像となるか、あるいは全く立体としては見えない画像となってしまう。
Also, the use of a technique for generating an arbitrary viewpoint image leads to improvement of the above-described stereoscopic image display. This will be described with reference to FIG. FIG. 8 is a diagram for explaining a principle that leads to improvement of stereoscopic display by an arbitrary viewpoint image generation technique. As shown in FIG. 8, it is assumed that subjects 704 and 705 are photographed by two cameras 701 and 702 that are installed at a distance of 706 to obtain viewpoint images 701v and 702v. When the interval 706 is larger than the interval between the left and right eyes of a human (generally about 65 mm), even if the viewpoint image 701v is viewed with the left eye and the viewpoint image 702v is viewed with the right eye, the blurred stereoscopic image Or an image that cannot be seen as a solid at all.
そこで、カメラ701から人間の左右の眼の間隔と同じ間隔707だけ離れた視点位置703において被写体をみた視点画像703vを作成し、視点画像701vと視点画像703vとを用いることで、適正な立体画像として観察することが可能となる。
Therefore, a viewpoint image 703v in which a subject is viewed at a viewpoint position 703 that is separated from the camera 701 by the same distance 707 as the distance between the left and right eyes of a human is created, and an appropriate stereoscopic image is obtained by using the viewpoint image 701v and the viewpoint image 703v. Can be observed.
また、2つのカメラ701、702の間隔が、人間の左右の眼の間隔と比較して狭すぎる場合であっても、カメラ701、またはカメラ702の地点から人間の左右の眼の間隔に相当する地点における視点画像を生成することにより、十分な立体感が得られる立体画像を観察することが可能になる。
Further, even when the distance between the two cameras 701 and 702 is too small compared to the distance between the left and right eyes of the human, it corresponds to the distance between the left and right eyes of the human from the point of the camera 701 or the camera 702. By generating a viewpoint image at a point, it is possible to observe a stereoscopic image that provides a sufficient stereoscopic effect.
さらに、上述した原理を用いることで、任意視点からの立体画像を観察することや、任意視点における立体画像の観察時の立体感を調整することが可能となる。
Furthermore, by using the above-described principle, it is possible to observe a stereoscopic image from an arbitrary viewpoint and adjust the stereoscopic effect when observing the stereoscopic image from an arbitrary viewpoint.
以上のように、複数の視点画像および対応する奥行き画像(奥行き情報)を利用すれば、画像表示の表現機能を向上させることができる。しかしながら、奥行き画像を必要とするため、記録・伝送時のデータ量が増えるという問題が生じる。
As described above, if a plurality of viewpoint images and corresponding depth images (depth information) are used, the expression function of image display can be improved. However, since a depth image is required, there arises a problem that the amount of data during recording and transmission increases.
この問題を解決するため、特許文献1では、奥行き情報を伝送するときに、視覚の奥行き変化に対する時間および空間周波数特性に従い、知覚感度の高い周波数成分に対して優先的に伝送量を割り当てるように奥行き値を符号化する技術が開示されている。特許文献1では、奥行き情報の情報量を圧縮するときに、人の奥行き知覚の感度に着目して符号量を割り当てることによって、奥行き情報の品質(すなわち奥行き情報を利用して生成される視点画像の品質)を保ちつつ、情報量の削減を可能にしている。
In order to solve this problem, in Patent Document 1, when transmitting depth information, a transmission amount is preferentially assigned to frequency components with high perceptual sensitivity according to temporal and spatial frequency characteristics with respect to visual depth changes. Techniques for encoding depth values are disclosed. In Patent Document 1, when compressing the information amount of depth information, a viewpoint image generated by using the depth information quality (that is, using the depth information) by assigning a code amount by paying attention to the sensitivity of human depth perception. Quality), while reducing the amount of information.
しかしながら、上記特許文献1の方法では、奥行き情報を符号化するために、奥行き情報の時間周波数特性および空間周波数特性を分析するため、奥行き情報をそのまま符号化する方法に比べて処理量が増加し、処理時間が遅延してしまう。特に、時間周波数特性を得るためには、複数のフレームにわたって奥行き情報を分析する必要があり、必ず処理に数フレーム以上の遅延が生じてしまう。
However, since the method of Patent Document 1 analyzes the time frequency characteristics and the spatial frequency characteristics of the depth information in order to encode the depth information, the amount of processing increases compared to the method of encoding the depth information as it is. , Processing time will be delayed. In particular, in order to obtain time-frequency characteristics, it is necessary to analyze depth information over a plurality of frames, and a delay of several frames or more is necessarily generated in the processing.
そして、数フレーム以上の遅延が生じてしまうため、リアルタイムに符号化・復号するようなアプリケーションには適用することができない。
And, since a delay of several frames or more occurs, it cannot be applied to an application that encodes and decodes in real time.
本発明は、上記の問題点に鑑みてなされたものであり、その目的は、奥行き値を、遅延が少なく、簡便な処理で符号化する画像符号化装置等を実現することにある。
The present invention has been made in view of the above problems, and an object of the present invention is to realize an image encoding device or the like that encodes a depth value by a simple process with little delay.
上記課題を解決するために、本発明に係る画像符号化装置は、元画像における単位領域毎の奥行き値を符号化する画像符号化装置であって、上記奥行き値を取得する奥行き値取得手段と、上記奥行き値取得手段が取得した奥行き値の上記画像における出現数を計数し、奥行き値毎の出現数の分布である奥行き値分布を作成する奥行き値分布作成手段と、上記奥行き値分布作成手段が作成した奥行き値分布の形状に基づいて、奥行き値分布における奥行き値の最小値以上最大値以下の範囲を複数に分割する分割手段と、上記分割手段が分割した各区間に含まれる奥行き値に対し、区間毎に異なる符号を割り当てる符号割当手段と、上記符号割当手段が割り当てた符号で上記奥行き値を符号化することによって上記元画像を符号化し、符号化画像を出力する符号化手段と、上記符号化手段が出力した符号化画像と、該符号化画像の符号化に用いた符号の数である符号数とを対応付けて出力する出力手段と、を備えていることを特徴としている。
In order to solve the above problem, an image encoding device according to the present invention is an image encoding device that encodes a depth value for each unit region in an original image, and a depth value acquisition unit that acquires the depth value. Depth value distribution creating means for counting the number of appearances of the depth value obtained by the depth value obtaining means in the image and creating a depth value distribution that is a distribution of the number of appearances for each depth value; and the depth value distribution creating means Based on the shape of the depth value distribution created by the dividing means for dividing the range of the depth value from the minimum value to the maximum value into a plurality of depth values in the depth value distribution, and the depth value included in each section divided by the dividing means On the other hand, a code allocating unit that allocates a different code for each section, and the original image is encoded by encoding the depth value with a code allocated by the code allocating unit. And an output means for outputting the encoded image output from the encoding means and the number of codes used for encoding the encoded image in association with each other. It is characterized by having.
また、本発明に係る画像符号化装置の制御方法は、元画像における単位領域毎の奥行き値を符号化する画像符号化装置の制御方法であって、上記奥行き値を取得する奥行き値取得ステップと、上記奥行き値取得ステップで取得した奥行き値の上記画像における出現数を計数し、奥行き値毎の出現数の分布である奥行き値分布を作成する奥行き値分布作成ステップと、上記奥行き値分布作成ステップで作成した奥行き値分布の形状に基づいて、奥行き値分布における奥行き値の最小値以上最大値以下の範囲を複数に分割する分割ステップと、上記分割ステップで分割した各区間に含まれる奥行き値に対し、区間毎に異なる符号を割り当てる符号割当ステップと、上記符号割当ステップで割り当てた符号で上記奥行き値を符号化することによって上記元画像を符号化し、符号化画像を出力する符号化ステップと、上記符号化ステップで出力した符号化画像と、該符号化画像の符号化に用いた符号の数である符号数とを対応付けて出力する出力ステップと、を含むことを特徴としている。
Further, a control method for an image encoding device according to the present invention is a control method for an image encoding device that encodes a depth value for each unit region in an original image, the depth value acquiring step for acquiring the depth value, and The depth value distribution creating step for counting the number of appearances of the depth value obtained in the depth value obtaining step in the image and creating a depth value distribution that is a distribution of the number of appearances for each depth value, and the depth value distribution creating step Based on the shape of the depth value distribution created in step 1, the division step for dividing the range of the depth value in the depth value distribution from the minimum value to the maximum value into a plurality of divisions, and the depth value included in each section divided in the division step On the other hand, a code allocation step in which a different code is assigned to each section, and the depth value is encoded with the code allocated in the code allocation step. Corresponds to the encoding step of encoding the original image and outputting the encoded image, the encoded image output in the encoding step, and the code number that is the number of codes used for encoding the encoded image And an output step for outputting.
上記の構成または方法によれば、元画像における奥行き値毎の出現数の分布の形状に基づいて、奥行き値の最小値以上最大値以下の範囲を分割し、分割した各区間に含まれる奥行き値に対し区間毎に異なる符号を割り当てて、上記元画像を符号化する。
According to the above configuration or method, based on the shape of the distribution of the number of appearances for each depth value in the original image, the range between the minimum value and the maximum value of the depth value is divided, and the depth value included in each divided section A different code is assigned to each section, and the original image is encoded.
これにより、1枚の元画像における奥行き値の出現数の分布の形状の特徴を維持したまま奥行き値を符号化することができるので、画像の特徴を維持することができる。また、奥行き値の出現数の分布を分割し、分割した各区間に符号を割り当てて符号化するので、簡便な処理で元画像の符号化を行うことができる。
Thus, the depth value can be encoded while maintaining the shape characteristic of the distribution of the number of occurrences of the depth value in one original image, so that the image feature can be maintained. In addition, since the distribution of the number of appearances of the depth value is divided and a code is assigned to each divided section, the original image can be encoded by a simple process.
また、1枚の元画像のみから、奥行き値を符号化することができるので、画像を複数枚用いて奥行き値の符号化を行う場合のように、画像に対して、符号化した奥行き値が遅延してしまうことを防止することができる。
In addition, since the depth value can be encoded from only one original image, the encoded depth value is determined for the image as in the case of encoding the depth value using a plurality of images. It is possible to prevent delay.
本発明に係る画像符号化装置では、上記分割手段は、上記奥行き値分布作成手段が作成した奥行き値分布における出現数の極大値の個数を用いて、奥行き値分布における奥行き値の最小値以上最大値以下の範囲を分割する個数を決定するものであることが好ましい。
In the image encoding device according to the present invention, the dividing unit uses the number of local maximum values of the number of appearances in the depth value distribution created by the depth value distribution creating unit, and is greater than or equal to the minimum value of the depth value in the depth value distribution. It is preferable to determine the number to divide the range below the value.
上記の構成によれば、奥行き値分布における出現数の極大値の個数を用いて、奥行き値の最小値以上最大値以下の範囲を分割する個数を決定する。そして、極大値の個数は、奥行き値分布の形状を特徴づけるものであるので、極大値の個数を用いて分割する個数を決定することにより、符号化後の奥行き値の分布の形状を、符号化前の奥行き値の分布の形状と近似したものとすることができる。
According to the above configuration, the number of divisions of the range from the minimum value of the depth value to the maximum value is determined using the maximum number of occurrences in the depth value distribution. Since the number of local maximum values characterizes the shape of the depth value distribution, by determining the number to be divided using the number of local maximum values, the shape of the distribution of depth values after encoding is encoded. It can be approximated to the shape of the distribution of depth values before conversion.
これにより、奥行き値分布の形状の特徴を損なうことなく、奥行き値を符号化することができる。
This makes it possible to encode the depth value without impairing the shape characteristics of the depth value distribution.
極大値の個数を用いて、奥行き値の最小値以上最大値以下の範囲を分割する個数を決定する方法としては、例えば、極大値の個数と、極大値間の個数とを加算した数を分割する個数とすることが挙げられる。これにより、極大値およびその間の奥行き値を表現することが可能となり、奥行き値の出現数の分布の形状を維持したまま奥行き値の符号化が可能となる。
As a method of determining the number of divisions of the range between the minimum value and the maximum value of the depth value using the number of local maximum values, for example, the number obtained by adding the number of local maximum values and the number between local maximum values is divided. It is mentioned to make it the number to do. As a result, it is possible to represent the maximum value and the depth value therebetween, and it is possible to encode the depth value while maintaining the shape of the distribution of the appearance number of the depth value.
本発明に係る画像符号化装置では、上記割当手段は、奥行き値分布における奥行き値の最小値以上最大値以下の範囲のうち、該奥行き値の最大値と最小値とに異なる符号を割り当てるとともに、該最大値と該最小値とを除いた残りの範囲を分割した区間毎に異なる符号を割り当てるものであってもよい。
In the image encoding device according to the present invention, the assigning means assigns different codes to the maximum value and the minimum value of the depth value in a range of the depth value in the depth value distribution that is not less than the minimum value and not more than the maximum value, A different code may be assigned to each section obtained by dividing the remaining range excluding the maximum value and the minimum value.
上記の構成によれば、奥行き値の最大値と最小値とに異なる符号が割り当てられるとともに、該最大値と該最小値とを除いた残りの範囲を分割した区間毎に異なる符号が割り当てられる。よって、符号化の前後において、奥行き値の最大値と最小値との出現数は変わらない。そして、奥行き値の最大値と最小値とは、画像における最も遠い被写体と最も近い被写体を示すものである。したがって、奥行き値の最大値と最小値との出現数が符号化によって変化しないので、画像における最も遠い被写体と最も近い被写体とが画像において占める領域を変化させないことができ、画像の特徴を損なわずに符号化を行うことができる。
According to the above configuration, different codes are assigned to the maximum value and the minimum value of the depth value, and different codes are assigned to each section obtained by dividing the remaining range excluding the maximum value and the minimum value. Therefore, the number of appearances of the maximum value and the minimum value of the depth value does not change before and after encoding. The maximum value and the minimum value of the depth value indicate the farthest subject and the closest subject in the image. Therefore, since the number of occurrences of the maximum value and the minimum value of the depth value does not change by encoding, the area occupied by the farthest subject and the nearest subject in the image can be kept unchanged, and the image characteristics are not impaired. Can be encoded.
本発明に係る画像符号化装置では、上記分割手段は、上記奥行き値分布における奥行き値の最小値以上最大値以下の範囲において、上記奥行き値の出現数の極大値を起点として所定の範囲毎に上記奥行き値分布の傾きを求め、奥行き値分布の傾きの大きい所定の範囲を奥行き値分布の傾きの小さい所定の範囲よりも多く分割するものであってもよい。
In the image encoding device according to the present invention, the dividing unit has a maximum value of the number of occurrences of the depth value as a starting point in a range of the depth value distribution in the depth value distribution that is not less than the minimum value and not more than the maximum value. The inclination of the depth value distribution may be obtained, and a predetermined range with a large inclination of the depth value distribution may be divided more than a predetermined range with a small inclination of the depth value distribution.
そして、奥行き値分布において傾きが大きいとは、奥行き値の出現数が急激に変化していることを示している。よって、上記の構成によれば、分割手段は、奥行き値分布における所定の範囲毎の傾きを求め、傾きが大きい所定の範囲を傾きが小さい所定の範囲よりも多く分割するので、奥行き値の出現数が急激に変化している範囲については、割り当てる符号を多くし、奥行き値の出現数があまり変化していない範囲については、割り当てる符号を少なくすることができる。これにより、より少ない符号数で画像の遠近感を損なわずに符号化することができる。
Further, a large inclination in the depth value distribution indicates that the number of appearances of the depth value is changing rapidly. Therefore, according to the above configuration, the dividing unit obtains the inclination for each predetermined range in the depth value distribution, and divides the predetermined range with the large inclination more than the predetermined range with the small inclination, so that the appearance of the depth value The number of codes to be assigned can be increased for a range in which the number is changing rapidly, and the number of codes to be assigned can be reduced for a range in which the number of occurrences of depth values has not changed much. Thus, encoding can be performed with a smaller number of codes without impairing the perspective of the image.
本発明に係る画像符号化装置では、上記元画像は動画像であり、上記出力手段は、上記符号化手段が出力した符号化画像の符号化に用いた符号の符号数と、該符号化画像の直前に上記符号化手段が出力した符号化画像の符号化に用いた符号の符号数との差分を出力するものであってもよい。
In the image encoding device according to the present invention, the original image is a moving image, and the output means includes the number of codes used for encoding the encoded image output from the encoding means, and the encoded image. A difference from the number of codes of the code used for encoding the encoded image output by the encoding means immediately before the output may be output.
上記の構成によれば、出力手段は、符号化手段が出力した符号化画像の符号化に用いた符号の符号数と、該符号化画像の直前に上記符号化手段が出力した符号化画像の符号化に用いた符号の符号数との差分を出力する。そして、差分を示す情報は、符号の数を示す情報よりも情報量が少ない。よって、より少ない情報量で符号化画像の符号化に用いた符号数を示す情報を出力することができる。
According to the above configuration, the output unit includes the number of codes used for encoding the encoded image output from the encoding unit and the encoded image output from the encoding unit immediately before the encoded image. The difference from the code number of the code used for encoding is output. The information indicating the difference has a smaller information amount than the information indicating the number of codes. Therefore, it is possible to output information indicating the number of codes used for encoding the encoded image with a smaller amount of information.
上記課題を解決するために、本発明に係る画像復号装置は、元画像を符号化した符号化画像および該符号化画像の符号化に用いられた符号の数である符号数を取得する取得手段と、上記取得手段が取得した符号数と、元画像の奥行き値を表現するための階調数との比である変換比を求め、求めた変換比を上記取得手段が取得した符号化画像の奥行き値に乗ずることによって符号化画像を復号する復号手段と、を備えていることを特徴としている。
In order to solve the above problems, an image decoding apparatus according to the present invention acquires an encoded image obtained by encoding an original image and a code number that is the number of codes used for encoding the encoded image. And a conversion ratio that is a ratio between the number of codes acquired by the acquisition unit and the number of gradations for expressing the depth value of the original image, and the calculated conversion ratio of the encoded image acquired by the acquisition unit And decoding means for decoding the encoded image by multiplying the depth value.
また、本発明に係る画像復号装置の制御方法は、元画像を符号化した符号化画像および該符号化画像の符号化に用いられた符号の数である符号数を取得する取得ステップと、上記取得ステップで取得した符号数と、元画像の奥行き値を表現するための階調数との比である変換比を求め、求めた変換比を上記取得ステップで取得した符号化画像の奥行き値に乗ずることによって符号化画像を復号する復号ステップと、を含むことを特徴としている。
In addition, the control method of the image decoding device according to the present invention includes an acquisition step of acquiring an encoded image obtained by encoding an original image and a code number that is the number of codes used for encoding the encoded image; A conversion ratio that is a ratio between the number of codes acquired in the acquisition step and the number of gradations for expressing the depth value of the original image is obtained, and the obtained conversion ratio is used as the depth value of the encoded image acquired in the acquisition step. And a decoding step of decoding the encoded image by multiplication.
上記の構成または方法によれば、符号化画像の奥行き値に対し、該符号化画像が符号化された符号の数と元画像の奥行き値を表現するための階調数との比である変換比を乗ずることにより符号化画像の奥行き値を復号するので、表現すべき階調数で表現された奥行き値の元画像に符号化画像を復号することができる。
According to the above configuration or method, for the depth value of the encoded image, conversion that is a ratio between the number of codes encoded in the encoded image and the number of gradations for expressing the depth value of the original image Since the depth value of the encoded image is decoded by multiplying by the ratio, the encoded image can be decoded to the original image of the depth value expressed by the number of gradations to be expressed.
なお、上記画像符号化装置および画像復号装置は、コンピュータによって実現してもよく、この場合には、コンピュータを上記各手段として動作させることにより上記画像符号化装置をコンピュータにて実現させる画像符号化装置の制御プログラム、上記画像復号装置をコンピュータにて実現させる画像復号装置の制御プログラム、およびこれらの少なくともいずれか一方を記録したコンピュータ読み取り可能な記録媒体も、本発明の範疇に入る。
Note that the image encoding device and the image decoding device may be realized by a computer. In this case, the image encoding device that causes the image encoding device to be realized by the computer by causing the computer to operate as the respective means. An apparatus control program, an image decoding apparatus control program for realizing the image decoding apparatus by a computer, and a computer-readable recording medium on which at least one of them is recorded also fall within the scope of the present invention.
以上のように、本発明に係る画像符号化装置は、元画像における単位領域毎の奥行き値を取得する奥行き値取得手段と、上記奥行き値取得手段が取得した奥行き値の上記画像における出現数を計数し、奥行き値毎の出現数の分布である奥行き値分布を作成する奥行き値分布作成手段と、上記奥行き値分布作成手段が作成した奥行き値分布の形状に基づいて、奥行き値分布における奥行き値の最小値以上最大値以下の範囲を複数に分割する分割手段と、上記分割手段が分割した各区間に含まれる奥行き値に対し、区間毎に異なる符号を割り当てる符号割当手段と、上記符号割当手段が割り当てた符号で上記奥行き値を符号化することによって上記元画像を符号化し、符号化画像を出力する符号化手段と、上記符号化手段が出力した符号化画像と、該符号化画像の符号化に用いた符号の数である符号数とを対応付けて出力する出力手段と、を備えている構成である。
As described above, the image coding apparatus according to the present invention uses the depth value acquisition unit that acquires the depth value for each unit region in the original image, and the appearance number of the depth value acquired by the depth value acquisition unit in the image. A depth value distribution creating unit that counts and creates a depth value distribution that is a distribution of the number of appearances for each depth value, and a depth value in the depth value distribution based on the shape of the depth value distribution created by the depth value distribution creating unit. A dividing unit that divides a range between the minimum value and the maximum value into a plurality of values, a code allocating unit that assigns a different code to each of the depth values included in each section divided by the dividing unit, and the code allocating unit Encoding the depth value with the code assigned by the encoding means for encoding the original image and outputting the encoded image; and the encoded image output by the encoding means A configuration that includes an output means for outputting in association with the number code and the number of codes used in coding the coded image.
また、本発明に係る画像符号化装置の制御方法は、元画像における単位領域毎の奥行き値を取得する奥行き値取得ステップと、上記奥行き値取得ステップで取得した奥行き値の上記画像における出現数を計数し、奥行き値毎の出現数の分布である奥行き値分布を作成する奥行き値分布作成ステップと、上記奥行き値分布作成ステップで作成した奥行き値分布の形状に基づいて、奥行き値分布における奥行き値の最小値以上最大値以下の範囲を複数に分割する分割ステップと、上記分割ステップで分割した各区間に含まれる奥行き値に対し、区間毎に異なる符号を割り当てる符号割当ステップと、上記符号割当ステップで割り当てた符号で上記奥行き値を符号化することによって上記元画像を符号化し、符号化画像を出力する符号化ステップと、上記符号化ステップで出力した符号化画像と、該符号化画像の符号化に用いた符号の数である符号数とを対応付けて出力する出力ステップと、を含む方法である。
The image encoding device control method according to the present invention includes a depth value acquisition step of acquiring a depth value for each unit region in the original image, and the number of appearances of the depth value acquired in the depth value acquisition step in the image. A depth value distribution creating step for counting and creating a depth value distribution that is a distribution of the number of appearances for each depth value, and a depth value in the depth value distribution based on the shape of the depth value distribution created in the depth value distribution creating step. A division step for dividing a range from the minimum value to the maximum value into a plurality, a code assignment step for assigning a different code for each section to the depth value included in each section divided in the division step, and the code assignment step An encoding step of encoding the original image by encoding the depth value with the code assigned in step 1 and outputting the encoded image; , The method comprising the coded image output by the encoding step, an output step of outputting in association the number of codes and the number of codes used in coding the coded image.
これにより、1枚の元画像における奥行き値の出現数の分布の形状の特徴を維持したまま奥行き値を符号化することができるので、画像の特徴を維持することができる。また、奥行き値の出現数の分布を分割し、分割した各区間に符号を割り当てて符号化するので、簡便な処理で元画像の符号化を行うことができるという効果を奏する。
Thus, the depth value can be encoded while maintaining the shape characteristic of the distribution of the number of occurrences of the depth value in one original image, so that the image feature can be maintained. Further, since the distribution of the number of appearances of depth values is divided and a code is assigned to each divided section, the original image can be encoded by a simple process.
また、1枚の元画像のみから、奥行き値を符号化することができるので、画像を複数枚用いて奥行き値の符号化を行う場合のように、画像に対して、符号化した奥行き値が遅延してしまうことを防止することができるという効果を奏する。
In addition, since the depth value can be encoded from only one original image, the encoded depth value is determined for the image as in the case of encoding the depth value using a plurality of images. There is an effect that the delay can be prevented.
また、本発明に係る画像復号装置は、元画像を符号化した符号化画像および該符号化画像の符号化に用いられた符号の数である符号数を取得する取得手段と、上記取得手段が取得した符号数と、元画像の奥行き値を表現するための階調数との比である変換比を求め、求めた変換比を上記取得手段が取得した符号化画像の奥行き値に乗ずることによって符号化画像を復号する復号手段と、を備えている構成である。
The image decoding apparatus according to the present invention includes an acquisition unit that acquires an encoded image obtained by encoding an original image, and a code number that is the number of codes used for encoding the encoded image, and the acquisition unit includes: By obtaining a conversion ratio that is a ratio between the acquired number of codes and the number of gradations for expressing the depth value of the original image, and multiplying the obtained conversion ratio by the depth value of the encoded image acquired by the acquisition means And a decoding means for decoding the encoded image.
また、本発明に係る画像復号装置の制御方法は、元画像を符号化した符号化画像および該符号化画像の符号化に用いられた符号の数である符号数を取得する取得ステップと、上記取得ステップで取得した符号数と、元画像の奥行き値を表現するための階調数との比である変換比を求め、求めた変換比を上記取得手段が取得した符号化画像の奥行き値に乗ずることによって符号化画像を復号する復号ステップと、を含む方法である。
In addition, the control method of the image decoding device according to the present invention includes an acquisition step of acquiring an encoded image obtained by encoding an original image and a code number that is the number of codes used for encoding the encoded image; A conversion ratio that is a ratio between the number of codes acquired in the acquisition step and the number of gradations for expressing the depth value of the original image is obtained, and the obtained conversion ratio is used as the depth value of the encoded image acquired by the acquisition unit. And a decoding step of decoding the encoded image by multiplication.
これにより、表現すべき階調数で表現された奥行き値の元画像に符号化画像を復号することができるという効果を奏する。
This produces an effect that the encoded image can be decoded into the original image of the depth value expressed by the number of gradations to be expressed.
本発明のさらに他の目的、特徴、および優れた点は、以下に示す記載によって十分に分かるであろう。また、本発明の利点は、添付図面を参照した次の説明で明白になるであろう。
Further objects, features, and excellent points of the present invention will be fully understood from the following description. The advantages of the present invention will become apparent from the following description with reference to the accompanying drawings.
以下、実施例により、本発明をさらに詳細に説明するが、本発明はこれらにより何ら限定されるものではない。
Hereinafter, the present invention will be described in more detail with reference to examples, but the present invention is not limited thereto.
本発明の一実施の形態について図1から図5に基づいて説明すれば、以下のとおりである。
An embodiment of the present invention will be described with reference to FIGS. 1 to 5 as follows.
(画像符号化装置の構成)
図1は、本実施の形態に係る画像符号化装置1の要部構成を示すブロック図である。画像符号化装置1は、複数の視点画像(例えば、右眼用画像および左眼用画像)および対応する奥行き値に対し、符号化処理を施して情報量を削減し、送信する装置である。なお、右眼用画像とは、観察者が右眼で見ることを想定している画像であり、左眼用画像とは、観察者が左眼で見ることを想定している画像である。観察者が、右眼用画像と左眼用画像とを同時に見ることで、画像に表示されている被写体を立体的に見ることができるものである。 (Configuration of image encoding device)
FIG. 1 is a block diagram showing a main configuration of an image encoding device 1 according to the present embodiment. The image encoding device 1 is a device that performs encoding processing on a plurality of viewpoint images (for example, an image for the right eye and an image for the left eye) and a corresponding depth value to reduce the amount of information and transmits the image. The right-eye image is an image assumed to be viewed by the observer with the right eye, and the left-eye image is an image assumed to be viewed by the observer with the left eye. By observing the right-eye image and the left-eye image at the same time, the observer can view the subject displayed in the image in three dimensions.
図1は、本実施の形態に係る画像符号化装置1の要部構成を示すブロック図である。画像符号化装置1は、複数の視点画像(例えば、右眼用画像および左眼用画像)および対応する奥行き値に対し、符号化処理を施して情報量を削減し、送信する装置である。なお、右眼用画像とは、観察者が右眼で見ることを想定している画像であり、左眼用画像とは、観察者が左眼で見ることを想定している画像である。観察者が、右眼用画像と左眼用画像とを同時に見ることで、画像に表示されている被写体を立体的に見ることができるものである。 (Configuration of image encoding device)
FIG. 1 is a block diagram showing a main configuration of an image encoding device 1 according to the present embodiment. The image encoding device 1 is a device that performs encoding processing on a plurality of viewpoint images (for example, an image for the right eye and an image for the left eye) and a corresponding depth value to reduce the amount of information and transmits the image. The right-eye image is an image assumed to be viewed by the observer with the right eye, and the left-eye image is an image assumed to be viewed by the observer with the left eye. By observing the right-eye image and the left-eye image at the same time, the observer can view the subject displayed in the image in three dimensions.
図1に示すように、画像符号化装置1は、奥行き値符号化部10、視点画像取得部11、視点画像符号化部12、奥行き算出部13、奥行き画像符号化部16、撮影条件情報取得部17、および多重化部18を含む構成である。また、奥行き値符号化部10は、奥行き値分析部(奥行き値取得手段、奥行き値分布作成手段、分割手段、符号割当手段)14および奥行き値変換部(符号化手段、出力手段)15を含む構成である。
As shown in FIG. 1, the image encoding device 1 includes a depth value encoding unit 10, a viewpoint image acquisition unit 11, a viewpoint image encoding unit 12, a depth calculation unit 13, a depth image encoding unit 16, and acquisition of shooting condition information. The configuration includes a unit 17 and a multiplexing unit 18. The depth value encoding unit 10 includes a depth value analysis unit (depth value acquisition unit, depth value distribution generation unit, division unit, code allocation unit) 14 and a depth value conversion unit (encoding unit, output unit) 15. It is a configuration.
視点画像取得部11は、右眼用画像および左眼用画像等の視点画像を取得し、視点画像符号化部12および奥行き算出部13へ送信するものである。なお、視点画像取得部11が取得する視点画像は動画像であってもよいし、静止画像であってもよい。
The viewpoint image acquisition unit 11 acquires viewpoint images such as a right eye image and a left eye image, and transmits the viewpoint images to the viewpoint image encoding unit 12 and the depth calculation unit 13. Note that the viewpoint image acquired by the viewpoint image acquisition unit 11 may be a moving image or a still image.
視点画像符号化部12は、取得した視点画像を所定の符号化方式に基づいて圧縮符号化するものである。符号化方式としては、視点画像が静止画像であればJPEG(Joint Photographic Experts Group)やJPEG2000などの方式を挙げることができる。また、視点画像が動画像であればMPEG(Moving Picture Experts Group)-2、MPEG-4、AVC(Advanced Video Coding)/H.264などの方式を挙げることができる。
The viewpoint image encoding unit 12 compresses and encodes the acquired viewpoint image based on a predetermined encoding method. Examples of the encoding method include JPEG (Joint 画像 Photographic Experts Group) and JPEG2000 if the viewpoint image is a still image. If the viewpoint image is a moving image, MPEG (Moving Picture Experts Group) -2, MPEG-4, AVC (Advanced Video Coding) / H. H.264 or the like can be cited.
奥行き算出部13は、視点画像取得部11から取得した右眼用画像および左眼用画像から、奥行き値を算出するものである。そして、算出した奥行き値を奥行き値符号化部10へ送信する。なお、本実施の形態では、奥行き算出部13が算出した奥行き値は、8ビットの輝度情報をもつ奥行き画像(元画像)として表現されている。なお、奥行き値を表現するビット数は8ビットに限られるものではない。
The depth calculation unit 13 calculates a depth value from the right eye image and the left eye image acquired from the viewpoint image acquisition unit 11. Then, the calculated depth value is transmitted to the depth value encoding unit 10. In the present embodiment, the depth value calculated by the depth calculation unit 13 is expressed as a depth image (original image) having 8-bit luminance information. Note that the number of bits representing the depth value is not limited to 8 bits.
奥行き値を算出する方法としては、右眼用画像と左眼用画像とについて、ブロックマッチングを使って対応する各画素(単位領域)の移動量を求め、求めた移動量から奥行き値を算出する方法を挙げることができる。なお、奥行き値は、画素ごとに算出しなければならないものではなく、複数の画素を一単位として算出するものであってもよい。
As a method of calculating the depth value, the movement amount of each corresponding pixel (unit region) is obtained using block matching for the right-eye image and the left-eye image, and the depth value is calculated from the obtained movement amount. A method can be mentioned. The depth value does not have to be calculated for each pixel, but may be calculated with a plurality of pixels as one unit.
また、奥行き値を、距離測定カメラを用いて測定する構成であってもよい。距離測定カメラとは、被写体までの距離を測定することのできるカメラであり、例えば、赤外光線を被写体に向けて照射し、その光線が反射して戻ってくるまでの時間を測定することによって、カメラから被写体までの距離を推定するものである。測定に際し、赤外光線を平面的に密な状態で照射し、その反射光を、赤外光線を検出できる撮像デバイスで受けることにより、画像を撮影するのと同等の解像度の距離画像すなわち奥行き画像を得ることができる。ここで、奥行き画像とは、単位領域(例えば画素)ごとに、カメラと被写体との距離(奥行き値)を輝度情報によって構成した画像である。
Further, the depth value may be measured using a distance measuring camera. A distance measurement camera is a camera that can measure the distance to a subject, for example, by irradiating an infrared ray toward the subject and measuring the time until the ray is reflected back. The distance from the camera to the subject is estimated. When measuring, irradiate infrared rays in a dense plane, and receive the reflected light with an imaging device that can detect infrared rays. Can be obtained. Here, the depth image is an image in which the distance (depth value) between the camera and the subject is configured by luminance information for each unit region (for example, pixel).
奥行き値符号化部10は、奥行き算出部13から取得した奥行き値を符号化するものである。具体的には、奥行き値分析部14が、取得した奥行き値である輝度値の分布状態を分析し、分析した奥行き値分布の奥行き値の最小値と最大値との範囲を複数に分割して、分割した各区間に異なる符号を割り当てるものである。そして、分割した各区間に含まれる奥行き値と各区間に割り当てられた符号とを奥行き値変換部15へ送信する。奥行き値の分析の詳細については後述する。
The depth value encoding unit 10 encodes the depth value acquired from the depth calculation unit 13. Specifically, the depth value analysis unit 14 analyzes the distribution state of the luminance value that is the acquired depth value, and divides the range of the minimum value and maximum value of the analyzed depth value distribution into a plurality of values. A different code is assigned to each divided section. Then, the depth value included in each divided section and the code assigned to each section are transmitted to the depth value conversion unit 15. Details of the depth value analysis will be described later.
奥行き値変換部15は、取得した各区間に含まれる奥行き値と割り当てられた符号とから、各区間に含まれる奥行き値を割り当てられた符号で符号化するものである。そして、符号化後の奥行き値である符号化奥行き値と割り当てた符号の種類の数である符号数を示す情報である奥行き深度情報とを奥行き画像符号化部16へ送信する。具体的には、符号化奥行き値が3ビットで表現されている場合、奥行き深度情報は「3」、割り当てた符号の種類の数である符号数は、3ビットで表現できる階調数である「8」となる。なお、奥行き値の符号化、および奥行き深度情報の詳細については後述する。
The depth value conversion unit 15 encodes the depth value included in each section with the assigned code from the acquired depth value included in each section and the assigned code. Then, the encoded depth value that is the depth value after encoding and the depth depth information that is the information indicating the number of codes that are assigned are transmitted to the depth image encoding unit 16. Specifically, when the encoded depth value is represented by 3 bits, the depth depth information is “3”, and the number of codes that is the number of assigned code types is the number of gradations that can be represented by 3 bits. “8”. Details of the encoding of the depth value and the depth depth information will be described later.
奥行き画像符号化部16は、取得した符号化奥行き値を圧縮符号化するものである。符号化奥行き値は、輝度値が符号化されたものであるので画像として表現することができる。よって、奥行き画像符号化部16は、上述した視点画像符号化部12における符号化方式と同様の符号化方式により、符号化奥行き値をさらに圧縮符号化することができる。
The depth image encoding unit 16 compresses and encodes the acquired encoded depth value. The encoded depth value can be expressed as an image because the luminance value is encoded. Therefore, the depth image encoding unit 16 can further compress and encode the encoded depth value by an encoding method similar to the encoding method in the viewpoint image encoding unit 12 described above.
なお、視点画像取得部11で取得した視点画像が動画像の場合は、次のような符号化方式を採用してもよい。視点画像が動画像の場合、奥行き値はフレーム単位で変化するため、奥行き値に割り当てる符号の数を示す奥行き深度情報もフレーム単位で変化する。そこで、直前のフレームにおける奥行き深度情報との差分をとり、これを符号化する構成である。
Note that when the viewpoint image acquired by the viewpoint image acquisition unit 11 is a moving image, the following encoding method may be employed. When the viewpoint image is a moving image, the depth value changes in units of frames, and therefore depth depth information indicating the number of codes assigned to the depth values also changes in units of frames. Therefore, the difference between the depth and depth information in the immediately preceding frame is taken and encoded.
また、時間的に隣接したフレーム間の奥行き深度情報は急激に変化する可能性が低く、差分の値は、小さいほど出現頻度が高くなると考えられる。よって、この性質に基づいてハフマン符号などで最適な符号を生成することにより、さらに符号量を削減することができる。
Also, the depth / depth information between temporally adjacent frames is unlikely to change abruptly, and the smaller the difference value, the higher the appearance frequency. Therefore, the code amount can be further reduced by generating an optimum code such as a Huffman code based on this property.
撮影条件情報取得部17は、視点画像の撮影条件情報を取得し多重化部18へ送信するものである。撮影条件情報とは、右眼用画像を撮影したカメラと左眼用画像を撮影したカメラとの距離、各カメラの撮影方向(角度)、各カメラの焦点距離等である。
The imaging condition information acquisition unit 17 acquires the imaging condition information of the viewpoint image and transmits it to the multiplexing unit 18. The imaging condition information includes the distance between the camera that has captured the right-eye image and the camera that has captured the left-eye image, the imaging direction (angle) of each camera, the focal length of each camera, and the like.
多重化部18は、視点画像符号化部12から取得した符号化された視点画像、奥行き画像符号化部16から取得した符号化された奥行き値と奥行き深度情報、および撮影条件情報を多重化して、外部の復号装置へ送信する。
The multiplexing unit 18 multiplexes the encoded viewpoint image acquired from the viewpoint image encoding unit 12, the encoded depth value and depth depth information acquired from the depth image encoding unit 16, and shooting condition information. To an external decoding device.
(奥行き値分析部14、および奥行き値変換部15における処理)
次に、図2を用いて奥行き値分析部14における処理について説明する。図2は、奥行き値分析部14における処理を説明するための図である。 (Processing in the depthvalue analysis unit 14 and the depth value conversion unit 15)
Next, the process in the depthvalue analysis part 14 is demonstrated using FIG. FIG. 2 is a diagram for explaining processing in the depth value analysis unit 14.
次に、図2を用いて奥行き値分析部14における処理について説明する。図2は、奥行き値分析部14における処理を説明するための図である。 (Processing in the depth
Next, the process in the depth
図2(a)に示すような、近景に人物201、中遠景に家屋202、遠景に山並み203と空204を含むような視点画像があった場合、その奥行き値は、視点画像内の各被写体に対するカメラからの距離を輝度情報として表現した奥行き画像(図2(b))として表すことができる。通常、視点画像は各画素8ビットの輝度情報と、各画素8ビットの2種類の色差情報とで構成されている。また、奥行き画像は各画素8ビットの輝度情報で構成されている。
As shown in FIG. 2A, when there is a viewpoint image including a person 201 in the foreground, a house 202 in the middle distance, and a mountain range 203 and the sky 204 in the distance, the depth value is determined for each subject in the viewpoint image. Can be expressed as a depth image (FIG. 2B) expressing the distance from the camera as luminance information. Usually, the viewpoint image is composed of luminance information of 8 bits for each pixel and two kinds of color difference information of 8 bits for each pixel. The depth image is composed of 8-bit luminance information for each pixel.
そして、奥行き値分析部14は、図2(b)の奥行き画像について、奥行き値を示す輝度値ごとの出現数をカウントする。そして、カウントした結果である奥行き値分布は、図2(c)に示すような、横軸を奥行き値を輝度値で示した奥行き情報、縦軸を出現数とした、奥行き値の出現数を示す図(ヒストグラム)として表現することができる。そして、図2(c)から明らかなように、奥行き値の分布は、特定の値に出現数が偏って分布していることが分かる。よって、もともとは8ビット(256階調)で表現されている奥行き値を、256階調よりも少ない階調で表現しても、奥行き値の分布の形状の特徴は維持することができる。そこで、奥行き値分析部14は、奥行き値の分布の形状の特徴を維持できる、256階調よりも少ない階調を決定し、該階調数に奥行き値の分布を分割する。そして、分割した各区間にそれぞれ異なる符号を割り当てる。
Then, the depth value analysis unit 14 counts the number of appearances for each luminance value indicating the depth value in the depth image of FIG. As shown in FIG. 2C, the depth value distribution, which is the result of counting, is the depth information in which the horizontal axis is the depth value and the vertical axis is the number of appearances. It can be expressed as a diagram (histogram) shown. As is apparent from FIG. 2C, it can be seen that the distribution of depth values is distributed with the number of appearances biased to a specific value. Therefore, even if the depth value originally expressed by 8 bits (256 gradations) is expressed by gradations smaller than 256 gradations, the feature of the shape of the depth value distribution can be maintained. Therefore, the depth value analysis unit 14 determines gradations less than 256 gradations that can maintain the shape characteristics of the depth value distribution, and divides the depth value distribution into the number of gradations. A different code is assigned to each divided section.
より詳細に説明すると、図2(c)に示すように奥行き分布が3つの極大値を有している場合、極大値の数に相当する3階調に、それらの間の領域を表現する2階調を加えた5階調で、奥行き値を表現できると判定する。そして、5階調を表現できる最小ビット数として3を、奥行き値を表すビット数として決定する。そして、この決定したビット数を奥行き深度情報とする。そして、決定したビット数3がとり得る8階調で奥行き値を表現できるように、奥行き値分布を分割する。具体的には、8ビットで表現される奥行き値の最小値0から最大値255の範囲を、3ビットで表せる階調数である8つの区間に均等に分割し、3ビットで表せる最小値0から最大値7を順に割り当てる。
More specifically, in the case where the depth distribution has three maximum values as shown in FIG. 2C, the region between them is expressed in three gradations corresponding to the number of maximum values. It is determined that the depth value can be expressed with 5 gradations including gradations. Then, 3 is determined as the minimum number of bits that can represent five gradations as the number of bits that represent the depth value. The determined bit number is used as depth / depth information. Then, the depth value distribution is divided so that the depth value can be expressed with 8 gradations that the determined number of bits 3 can take. Specifically, the range of the minimum value 0 to the maximum value 255 of the depth value expressed in 8 bits is equally divided into 8 sections that are the number of gradations that can be expressed in 3 bits, and the minimum value 0 that can be expressed in 3 bits. To the maximum value 7 in order.
そして、奥行き値変換部15は、割り当てられた符号に奥行き値を符号化する。
The depth value conversion unit 15 encodes the depth value into the assigned code.
このように奥行き値を表現するビット数を削減した奥行き画像は、中間の階調が粗くなるが、画像の主要部分である近景の人物201、中遠景の家屋202、および遠景の山並み203と空204の各領域の奥行き値の関係については、ビット数を削減する前の関係を維持することができる。よって、画像内の遠近感の歪みを小さく抑えることができる。
In this way, the depth image in which the number of bits representing the depth value is reduced has a rough intermediate gradation, but the foreground person 201, the middle-distance house 202, and the distant mountain range 203, which are the main parts of the image, are empty. As for the relationship between the depth values of the respective areas 204, the relationship before reducing the number of bits can be maintained. Therefore, the perspective distortion in the image can be reduced.
なお、上記のように256階調を8階調に変換する際には、256階調を均等に8分割する以外の方法でもよい。例えば、8ビットで表現される奥行き値の最小値0と最大値255とに、3ビットの最小値0と最大値7とを符号として割り当てる。そして、残りの範囲の奥行き値である1~254を均等に分割して、小さい方から順に、3ビットの残りの値1~6を符号として割り当てる。この方法に従うと、変換前の奥行き値が最小値と最大値に特に集中するケースや、最小値と最大値の出現頻度が、隣接するそれぞれの奥行き値の出現頻度と極端に差があるケースなどで、最小値と最大値のみ別符号とすることで、それらの隣接区間との遠近関係を精度よく保持することができ、画像内の遠近感の歪みをより小さく抑えることが可能になる。
In addition, when converting 256 gradations to 8 gradations as described above, a method other than dividing the 256 gradations equally into 8 may be used. For example, a minimum value 0 and a maximum value 7 of 3 bits are assigned as codes to a minimum value 0 and a maximum value 255 of depth values expressed in 8 bits. Then, the remaining range of depth values 1 to 254 are equally divided, and the remaining values 1 to 6 of 3 bits are assigned as codes in ascending order. According to this method, the depth value before conversion is particularly concentrated on the minimum and maximum values, or the frequency of appearance of the minimum and maximum values is extremely different from the frequency of appearance of adjacent depth values. Thus, by using only separate codes for the minimum value and the maximum value, the perspective relationship with the adjacent sections can be accurately maintained, and the perspective distortion in the image can be further suppressed.
また、上記のように、8ビットで表現される奥行き値の0~255または1~254を均等に3ビットの値に割り当てるのではなく、奥行き値の分布に従って出現頻度の変化の大きい領域により多くの値を割り当てるものであってもよい。
In addition, as described above, the depth values 0 to 255 or 1 to 254 expressed in 8 bits are not evenly assigned to the 3-bit values, but more in areas where the change in appearance frequency is large according to the distribution of depth values. May be assigned.
例えば、極大値を起点として一定区間ごとにヒストグラムの傾きを求め、傾きの大きな区間すなわち奥行き値の変化の大きい区間には多くの値を割り当て、傾きの小さい区間すなわち奥行き値の変化の小さい区間には少ない値を割り当てる。このような割り当て方法により、表現できる奥行きの階調数を減らしても、奥行き値の変化の表現精度をあまり損なわずに、画像内の遠近感を再現することが可能になる。
For example, the slope of the histogram is calculated for each fixed section starting from the local maximum value, and many values are assigned to sections with a large slope, that is, sections with a large change in depth value, and are assigned to sections with a small slope, that is, sections with a small change in depth value. Assigns fewer values. With such an allocation method, it is possible to reproduce the perspective in the image without reducing the accuracy of expressing the change in depth value, even if the number of depth gradations that can be expressed is reduced.
以上の処理により、奥行き値変換部15において、8ビットで表現されている奥行き値を3ビットで表現することが可能となり、奥行き値1つあたりの情報量を5ビット削減することができる。そして、奥行き値変換部15は、ビット数を削減した奥行き値と、削減後のビット数を示す奥行き深度情報とを送信する。
By the above processing, the depth value converting unit 15 can express the depth value expressed in 8 bits as 3 bits, and the information amount per depth value can be reduced by 5 bits. Then, the depth value conversion unit 15 transmits the depth value obtained by reducing the number of bits and the depth depth information indicating the number of bits after the reduction.
なお、画像符号化装置1は、図1には図示していない記録装置やネットワーク制御装置と接続しており、多重化部18で多重化された符号化データ等は磁気ディスク、光ディスク、半導体メモリなどの記録メディアに蓄積されるものであってもよいし、また、ネットワーク経由で遠隔地の受信装置に送信されるものであってもよい。
The image encoding device 1 is connected to a recording device or a network control device not shown in FIG. 1, and the encoded data multiplexed by the multiplexing unit 18 is a magnetic disk, an optical disk, or a semiconductor memory. It may be stored in a recording medium such as, or may be transmitted to a remote receiving device via a network.
(画像符号化装置の処理の流れ)
次に図3を用いて、画像符号化装置1の処理の流れを説明する。図3は、画像符号化装置1の処理の流れを示すフローチャートである。 (Processing flow of image encoding device)
Next, a processing flow of the image encoding device 1 will be described with reference to FIG. FIG. 3 is a flowchart showing a process flow of the image encoding device 1.
次に図3を用いて、画像符号化装置1の処理の流れを説明する。図3は、画像符号化装置1の処理の流れを示すフローチャートである。 (Processing flow of image encoding device)
Next, a processing flow of the image encoding device 1 will be described with reference to FIG. FIG. 3 is a flowchart showing a process flow of the image encoding device 1.
図3に示すように、まず、視点画像取得部11が視点画像を取得する(S1)。次に、奥行き算出部13は、視点画像取得部11が取得した視点画像の奥行き値を算出する(S2、奥行き値取得ステップ)。そして、奥行き値分析部14は、奥行き算出部13が算出した奥行き値を分析し、奥行き値の分布を求める(S3、奥行き値分布作成ステップ)。そして、奥行き値の分布から、奥行き値を表現するビット数を決定する(S4、分割ステップ、符号割当ステップ)。その後、奥行き値変換部15は、奥行き値を、奥行き値分析部14が決定したビット数で表現するように変換する(S5、符号化ステップ、出力ステップ)。
As shown in FIG. 3, first, the viewpoint image acquisition unit 11 acquires a viewpoint image (S1). Next, the depth calculation unit 13 calculates the depth value of the viewpoint image acquired by the viewpoint image acquisition unit 11 (S2, depth value acquisition step). Then, the depth value analysis unit 14 analyzes the depth value calculated by the depth calculation unit 13 and obtains a distribution of depth values (S3, depth value distribution creation step). Then, the number of bits representing the depth value is determined from the distribution of depth values (S4, division step, code allocation step). Thereafter, the depth value conversion unit 15 converts the depth value so as to be expressed by the number of bits determined by the depth value analysis unit 14 (S5, encoding step, output step).
その後、奥行き画像符号化部16は、変換された奥行き値等をさらに圧縮符号化し(S6)、多重化部18が、符号化された符号化奥行き値、別途符号化された符号化視点画像、撮影条件情報を多重化して(S7)、他の装置等へ送信する。以上で、画像符号化装置1の処理が終了する。
Thereafter, the depth image encoding unit 16 further compresses and encodes the converted depth value and the like (S6), and the multiplexing unit 18 encodes the encoded depth value, the encoded viewpoint image that is encoded separately, The imaging condition information is multiplexed (S7) and transmitted to other devices. Above, the process of the image coding apparatus 1 is complete | finished.
(画像復号装置の構成)
次に、本実施の形態に係る画像復号装置2について、図4を用いて説明する。図4は、画像復号装置2の要部構成を示すブロック図である。画像復号装置2は、図示しない記録メディアやネットワークなどを介して画像符号化装置1から送信された符号化データに対して、復号処理を施し、複数の視点画像および視点画像に対応する奥行き情報、撮影条件情報等を復元するための装置である。 (Configuration of image decoding device)
Next, the image decoding apparatus 2 according to the present embodiment will be described with reference to FIG. FIG. 4 is a block diagram illustrating a main configuration of the image decoding device 2. The image decoding device 2 performs a decoding process on the encoded data transmitted from the image encoding device 1 via a recording medium or a network (not shown), depth information corresponding to a plurality of viewpoint images and viewpoint images, This is a device for restoring shooting condition information and the like.
次に、本実施の形態に係る画像復号装置2について、図4を用いて説明する。図4は、画像復号装置2の要部構成を示すブロック図である。画像復号装置2は、図示しない記録メディアやネットワークなどを介して画像符号化装置1から送信された符号化データに対して、復号処理を施し、複数の視点画像および視点画像に対応する奥行き情報、撮影条件情報等を復元するための装置である。 (Configuration of image decoding device)
Next, the image decoding apparatus 2 according to the present embodiment will be described with reference to FIG. FIG. 4 is a block diagram illustrating a main configuration of the image decoding device 2. The image decoding device 2 performs a decoding process on the encoded data transmitted from the image encoding device 1 via a recording medium or a network (not shown), depth information corresponding to a plurality of viewpoint images and viewpoint images, This is a device for restoring shooting condition information and the like.
分離部51は、符号化データを取得して、視点画像の符号化データ、奥行き値の符号化データ、および撮影条件情報とに分離するものである。そして、分離した視点画像の符号化データを視点画像復号部52へ、奥行き値の符号化データを奥行き画像復号部53へ送信する。
The separation unit 51 acquires encoded data and separates it into encoded data of viewpoint images, encoded data of depth values, and shooting condition information. Then, the encoded data of the separated viewpoint image is transmitted to the viewpoint image decoding unit 52, and the encoded data of the depth value is transmitted to the depth image decoding unit 53.
視点画像復号部52は、取得した視点画像の符号化データを、対応する方式に基づいて復号し、復号した視点画像(右眼用画像、左眼用画像)を送信するものである。
The viewpoint image decoding unit 52 decodes the acquired encoded data of the viewpoint image based on a corresponding method, and transmits the decoded viewpoint images (right-eye image and left-eye image).
奥行き画像復号部53は、取得した奥行き値の符号化データを復号し、奥行き値と奥行き深度情報とを奥行き値復号部54へ送信するものである。
The depth image decoding unit 53 decodes the encoded data of the acquired depth value and transmits the depth value and the depth depth information to the depth value decoding unit 54.
奥行き値復号部(取得手段、復号手段)54は、取得した奥行き深度情報を用いて、取得した奥行き値を変換前の奥行き値に復号(復元)するものである。なお、本実施の形態では、奥行き値復号部54における復号を、奥行き画像復号部53における復号と区別するため復元と呼ぶ。復元の詳細については後述する。
Depth value decoding unit (acquisition means, decoding means) 54 uses the acquired depth depth information to decode (restore) the acquired depth value into a depth value before conversion. In the present embodiment, decoding in the depth value decoding unit 54 is referred to as restoration in order to distinguish it from decoding in the depth image decoding unit 53. Details of the restoration will be described later.
なお、視点画像が動画像であり、奥行き深度情報が直前のフレームにおける奥行き深度情報との差分として表現されている場合は、奥行き値復号部54は、直前のフレームにおける奥行き深度情報に、奥行き画像復号部53において復号した差分値を加算して、今回のフレームの奥行き深度情報を得ればよい。
When the viewpoint image is a moving image and the depth / depth information is expressed as a difference from the depth / depth information in the immediately preceding frame, the depth value decoding unit 54 adds the depth image to the depth / depth information in the immediately preceding frame. The difference value decoded by the decoding unit 53 may be added to obtain depth / depth information of the current frame.
(奥行き値復号部54における処理)
次に、奥行き値復号部54における奥行き値の復号(復元)方法について、図5を用いて説明する。図5は、奥行き値復号部54における奥行き値の復元方法を説明するための図である。元々、奥行き値は8ビットで表現されており、画像として表現すれば図5(a)のようになる。これを、表現するビット数を3ビットに削減し、再び8ビットで表現するように復元する場合、削減したビット数を用いて復元する。具体的には、3ビットで表現される奥行き値を8ビットで表現できるように、削減したビット数である5ビットで表現できる階調数32を各奥行き値に対し乗じて復元する。 (Processing in Depth Value Decoding Unit 54)
Next, a depth value decoding (restoring) method in the depthvalue decoding unit 54 will be described with reference to FIG. FIG. 5 is a diagram for explaining a depth value restoration method in the depth value decoding unit 54. Originally, the depth value is expressed by 8 bits, and when expressed as an image, the depth value is as shown in FIG. When the number of bits to be expressed is reduced to 3 bits and restored so as to be expressed again with 8 bits, it is restored using the reduced number of bits. Specifically, the depth value represented by 3 bits is restored by multiplying each depth value by the number of gradations 32 that can be represented by 5 bits, so that the depth value represented by 3 bits can be represented by 8 bits.
次に、奥行き値復号部54における奥行き値の復号(復元)方法について、図5を用いて説明する。図5は、奥行き値復号部54における奥行き値の復元方法を説明するための図である。元々、奥行き値は8ビットで表現されており、画像として表現すれば図5(a)のようになる。これを、表現するビット数を3ビットに削減し、再び8ビットで表現するように復元する場合、削減したビット数を用いて復元する。具体的には、3ビットで表現される奥行き値を8ビットで表現できるように、削減したビット数である5ビットで表現できる階調数32を各奥行き値に対し乗じて復元する。 (Processing in Depth Value Decoding Unit 54)
Next, a depth value decoding (restoring) method in the depth
なお、奥行き値の最小値0と最大値7とに、8ビットの最小値0と最大値255とを割り当て、3ビットで表現される残りの奥行き値1~6に対し、8ビットの最小値と最大値を除く254階調が均等に対応するように、254÷6の商である42を乗じて復元するものであってもよい。
The 8-bit minimum value 0 and the maximum value 255 are assigned to the minimum value 0 and the maximum value 7 of the depth value, and the 8-bit minimum value is assigned to the remaining depth values 1 to 6 expressed in 3 bits. And 254 gradations excluding the maximum value may be equally restored by multiplying by 42, which is a quotient of 254/6.
これにより、3ビットで表現されていた奥行き情報を8ビットで表現することができる。
This makes it possible to express the depth information that was expressed in 3 bits in 8 bits.
復元された奥行き値が示す画像は、図5(b)に示すように、中間の階調すなわち表現分解能が粗くはなるが、画像の主要部分については、ビット数削減前の遠近感をほぼ再現することができる。よって、画像内の遠近感の歪みを小さく抑えることができる。
As shown in FIG. 5B, the image represented by the restored depth value has a medium gradation, that is, the resolution of expression is rough. However, the main part of the image almost reproduces the perspective before the bit number reduction. can do. Therefore, the perspective distortion in the image can be reduced.
そして、復元された奥行き値は、複数の視点画像から任意視点の画像を生成したり、立体画像として表示するときの立体感の調整などに利用することができる。
The restored depth value can be used to generate an image of an arbitrary viewpoint from a plurality of viewpoint images, or to adjust a stereoscopic effect when displayed as a stereoscopic image.
以上のように、本実施の形態によれば、視点画像に対応する奥行き値のみ、その表現分解能を削減するように符号化する一方、視点画像の表現分解能は維持して符号化するため、視点画像そのものの品質に影響を及ぼすことなく、奥行き値を符号化しデータ量を削減することができる。
As described above, according to the present embodiment, only the depth value corresponding to the viewpoint image is encoded so as to reduce the expression resolution, while the expression resolution of the viewpoint image is maintained and encoded. The depth value can be encoded and the amount of data can be reduced without affecting the quality of the image itself.
(その他)
以上のように、本発明に係る画像符号化装置は、元画像における単位領域毎の奥行き値を符号化する画像符号化装置であって、上記奥行き値を取得する奥行き値取得手段と、上記奥行き値取得手段が取得した奥行き値の上記画像における出現数を計数し、奥行き値毎の出現数の分布である奥行き値分布を作成する奥行き値分布作成手段と、上記奥行き値分布作成手段が作成した奥行き値分布の形状に基づいて、奥行き値分布における奥行き値の最小値以上最大値以下の範囲を複数に分割する分割手段と、上記分割手段が分割した各区間に含まれる奥行き値に対し、区間毎に異なる符号を割り当てる符号割当手段と、上記符号割当手段が割り当てた符号で上記奥行き値を符号化することによって上記元画像を符号化し、符号化画像を出力する符号化手段と、上記符号化手段が出力した符号化画像と、該符号化画像の符号化に用いた符号の数である符号数とを対応付けて出力する出力手段と、を備えていることを特徴としている。 (Other)
As described above, the image encoding apparatus according to the present invention is an image encoding apparatus that encodes a depth value for each unit region in an original image, and includes a depth value acquisition unit that acquires the depth value, and the depth. A depth value distribution creating unit that counts the number of appearances of the depth value acquired by the value acquisition unit in the image and creates a depth value distribution, which is a distribution of the number of appearances for each depth value, and the depth value distribution creating unit Based on the shape of the depth value distribution, a dividing unit that divides a range between the minimum value and the maximum value of the depth value in the depth value distribution into a plurality of sections, and for the depth value included in each section divided by the dividing unit, A code allocating unit for allocating a different code for each code, and a code for encoding the original image by encoding the depth value with the code allocated by the code allocating unit and outputting the encoded image. Encoding means, and output means for outputting the encoded image output from the encoding means and the number of codes used for encoding the encoded image in association with each other. It is a feature.
以上のように、本発明に係る画像符号化装置は、元画像における単位領域毎の奥行き値を符号化する画像符号化装置であって、上記奥行き値を取得する奥行き値取得手段と、上記奥行き値取得手段が取得した奥行き値の上記画像における出現数を計数し、奥行き値毎の出現数の分布である奥行き値分布を作成する奥行き値分布作成手段と、上記奥行き値分布作成手段が作成した奥行き値分布の形状に基づいて、奥行き値分布における奥行き値の最小値以上最大値以下の範囲を複数に分割する分割手段と、上記分割手段が分割した各区間に含まれる奥行き値に対し、区間毎に異なる符号を割り当てる符号割当手段と、上記符号割当手段が割り当てた符号で上記奥行き値を符号化することによって上記元画像を符号化し、符号化画像を出力する符号化手段と、上記符号化手段が出力した符号化画像と、該符号化画像の符号化に用いた符号の数である符号数とを対応付けて出力する出力手段と、を備えていることを特徴としている。 (Other)
As described above, the image encoding apparatus according to the present invention is an image encoding apparatus that encodes a depth value for each unit region in an original image, and includes a depth value acquisition unit that acquires the depth value, and the depth. A depth value distribution creating unit that counts the number of appearances of the depth value acquired by the value acquisition unit in the image and creates a depth value distribution, which is a distribution of the number of appearances for each depth value, and the depth value distribution creating unit Based on the shape of the depth value distribution, a dividing unit that divides a range between the minimum value and the maximum value of the depth value in the depth value distribution into a plurality of sections, and for the depth value included in each section divided by the dividing unit, A code allocating unit for allocating a different code for each code, and a code for encoding the original image by encoding the depth value with the code allocated by the code allocating unit and outputting the encoded image. Encoding means, and output means for outputting the encoded image output from the encoding means and the number of codes used for encoding the encoded image in association with each other. It is a feature.
また、本発明に係る画像符号化装置の制御方法は、元画像における単位領域毎の奥行き値を符号化する画像符号化装置の制御方法であって、上記奥行き値を取得する奥行き値取得ステップと、上記奥行き値取得ステップで取得した奥行き値の上記画像における出現数を計数し、奥行き値毎の出現数の分布である奥行き値分布を作成する奥行き値分布作成ステップと、上記奥行き値分布作成ステップで作成した奥行き値分布の形状に基づいて、奥行き値分布における奥行き値の最小値以上最大値以下の範囲を複数に分割する分割ステップと、上記分割ステップで分割した各区間に含まれる奥行き値に対し、区間毎に異なる符号を割り当てる符号割当ステップと、上記符号割当ステップで割り当てた符号で上記奥行き値を符号化することによって上記元画像を符号化し、符号化画像を出力する符号化ステップと、上記符号化ステップで出力した符号化画像と、該符号化画像の符号化に用いた符号の数である符号数とを対応付けて出力する出力ステップと、を含むことを特徴としている。
Further, a control method for an image encoding device according to the present invention is a control method for an image encoding device that encodes a depth value for each unit region in an original image, the depth value acquiring step for acquiring the depth value, and The depth value distribution creating step for counting the number of appearances of the depth value obtained in the depth value obtaining step in the image and creating a depth value distribution that is a distribution of the number of appearances for each depth value, and the depth value distribution creating step Based on the shape of the depth value distribution created in step 1, the division step for dividing the range of the depth value in the depth value distribution from the minimum value to the maximum value into a plurality of divisions, and the depth value included in each section divided in the division step On the other hand, a code allocation step in which a different code is assigned to each section, and the depth value is encoded with the code allocated in the code allocation step. Corresponds to the encoding step of encoding the original image and outputting the encoded image, the encoded image output in the encoding step, and the code number that is the number of codes used for encoding the encoded image And an output step for outputting.
上記の構成または方法によれば、元画像における奥行き値毎の出現数の分布の形状に基づいて、奥行き値の最小値以上最大値以下の範囲を分割し、分割した各区間に含まれる奥行き値に対し区間毎に異なる符号を割り当てて、上記元画像を符号化する。
According to the above configuration or method, based on the shape of the distribution of the number of appearances for each depth value in the original image, the range between the minimum value and the maximum value of the depth value is divided, and the depth value included in each divided section A different code is assigned to each section, and the original image is encoded.
これにより、1枚の元画像における奥行き値の出現数の分布の形状の特徴を維持したまま奥行き値を符号化することができるので、画像の特徴を維持することができる。また、奥行き値の出現数の分布を分割し、分割した各区間に符号を割り当てて符号化するので、簡便な処理で元画像の符号化を行うことができる。
Thus, the depth value can be encoded while maintaining the shape characteristic of the distribution of the number of occurrences of the depth value in one original image, so that the image feature can be maintained. In addition, since the distribution of the number of appearances of the depth value is divided and a code is assigned to each divided section, the original image can be encoded by a simple process.
また、1枚の元画像のみから、奥行き値を符号化することができるので、画像を複数枚用いて奥行き値の符号化を行う場合のように、画像に対して、符号化した奥行き値が遅延してしまうことを防止することができる。
In addition, since the depth value can be encoded from only one original image, the encoded depth value is determined for the image as in the case of encoding the depth value using a plurality of images. It is possible to prevent delay.
本発明に係る画像符号化装置では、上記分割手段は、上記奥行き値分布作成手段が作成した奥行き値分布における出現数の極大値の個数を用いて、奥行き値分布における奥行き値の最小値以上最大値以下の範囲を分割する個数を決定するものであることが好ましい。
In the image encoding device according to the present invention, the dividing unit uses the number of local maximum values of the number of appearances in the depth value distribution created by the depth value distribution creating unit, and is greater than or equal to the minimum value of the depth value in the depth value distribution. It is preferable to determine the number to divide the range below the value.
上記の構成によれば、奥行き値分布における出現数の極大値の個数を用いて、奥行き値の最小値以上最大値以下の範囲を分割する個数を決定する。そして、極大値の個数は、奥行き値分布の形状を特徴づけるものであるので、極大値の個数を用いて分割する個数を決定することにより、符号化後の奥行き値の分布の形状を、符号化前の奥行き値の分布の形状と近似したものとすることができる。
According to the above configuration, the number of divisions of the range from the minimum value of the depth value to the maximum value is determined using the maximum number of occurrences in the depth value distribution. Since the number of local maximum values characterizes the shape of the depth value distribution, by determining the number to be divided using the number of local maximum values, the shape of the distribution of depth values after encoding is encoded. It can be approximated to the shape of the distribution of depth values before conversion.
これにより、奥行き値分布の形状の特徴を損なうことなく、奥行き値を符号化することができる。
This makes it possible to encode the depth value without impairing the shape characteristics of the depth value distribution.
そして、極大値の個数を用いて、奥行き値の最小値以上最大値以下の範囲を分割する個数を決定する方法としては、例えば、極大値の個数と、極大値間の個数とを加算した数を分割する個数とすることが挙げられる。これにより、極大値およびその間の奥行き値を表現することが可能となり、奥行き値の出現数の分布の形状を維持したまま奥行き値の符号化が可能となる。
Then, as a method of determining the number of divisions of the range from the minimum value of the depth value to the maximum value using the number of local maximum values, for example, the number obtained by adding the number of local maximum values and the number between local maximum values Is the number to be divided. As a result, it is possible to represent the maximum value and the depth value therebetween, and it is possible to encode the depth value while maintaining the shape of the distribution of the appearance number of the depth value.
本発明に係る画像符号化装置では、上記割当手段は、奥行き値分布における奥行き値の最小値以上最大値以下の範囲のうち、該奥行き値の最大値と最小値とに異なる符号を割り当てるとともに、該最大値と該最小値とを除いた残りの範囲を分割した区間毎に異なる符号を割り当てるものであってもよい。
In the image encoding device according to the present invention, the assigning means assigns different codes to the maximum value and the minimum value of the depth value in a range of the depth value in the depth value distribution that is not less than the minimum value and not more than the maximum value, A different code may be assigned to each section obtained by dividing the remaining range excluding the maximum value and the minimum value.
上記の構成によれば、奥行き値の最大値と最小値とに異なる符号が割り当てられるとともに、該最大値と該最小値とを除いた残りの範囲を分割した区間毎に異なる符号が割り当てられる。よって、符号化の前後において、奥行き値の最大値と最小値との出現数は変わらない。そして、奥行き値の最大値と最小値とは、画像における最も遠い被写体と最も近い被写体を示すものである。したがって、奥行き値の最大値と最小値との出現数が符号化によって変化しないので、画像における最も遠い被写体と最も近い被写体とが画像において占める領域を変化させないことができ、画像の特徴を損なわずに符号化を行うことができる。
According to the above configuration, different codes are assigned to the maximum value and the minimum value of the depth value, and different codes are assigned to each section obtained by dividing the remaining range excluding the maximum value and the minimum value. Therefore, the number of appearances of the maximum value and the minimum value of the depth value does not change before and after encoding. The maximum value and the minimum value of the depth value indicate the farthest subject and the closest subject in the image. Therefore, since the number of occurrences of the maximum value and the minimum value of the depth value does not change by encoding, the area occupied by the farthest subject and the nearest subject in the image can be kept unchanged, and the image characteristics are not impaired. Can be encoded.
本発明に係る画像符号化装置では、上記分割手段は、上記奥行き値分布における奥行き値の最小値以上最大値以下の範囲において、上記奥行き値の出現数の極大値を起点として所定の範囲毎に上記奥行き値分布の傾きを求め、奥行き値分布の傾きの大きい所定の範囲を奥行き値分布の傾きの小さい所定の範囲よりも多く分割するものであってもよい。
In the image encoding device according to the present invention, the dividing unit has a maximum value of the number of occurrences of the depth value as a starting point in a range of the depth value distribution in the depth value distribution that is not less than the minimum value and not more than the maximum value. The inclination of the depth value distribution may be obtained, and a predetermined range with a large inclination of the depth value distribution may be divided more than a predetermined range with a small inclination of the depth value distribution.
そして、奥行き値分布において傾きが大きいとは、奥行き値の出現数が急激に変化していることを示している。よって、上記の構成によれば、分割手段は、奥行き値分布における所定の範囲毎の傾きを求め、傾きが大きい所定の範囲を傾きが小さい所定の範囲よりも多く分割するので、奥行き値の出現数が急激に変化している範囲については、割り当てる符号を多くし、奥行き値の出現数があまり変化していない範囲については、割り当てる符号を少なくすることができる。これにより、より少ない符号数で画像の遠近感を損なわずに符号化することができる。
Further, a large inclination in the depth value distribution indicates that the number of appearances of the depth value is changing rapidly. Therefore, according to the above configuration, the dividing unit obtains the inclination for each predetermined range in the depth value distribution, and divides the predetermined range with the large inclination more than the predetermined range with the small inclination, so that the appearance of the depth value The number of codes to be assigned can be increased for a range in which the number is changing rapidly, and the number of codes to be assigned can be reduced for a range in which the number of occurrences of depth values has not changed much. Thus, encoding can be performed with a smaller number of codes without impairing the perspective of the image.
本発明に係る画像符号化装置では、上記元画像は動画像であり、上記出力手段は、上記符号化手段が出力した符号化画像の符号化に用いた符号の符号数と、該符号化画像の直前に上記符号化手段が出力した符号化画像の符号化に用いた符号の符号数との差分を出力するものであってもよい。
In the image encoding device according to the present invention, the original image is a moving image, and the output means includes the number of codes used for encoding the encoded image output from the encoding means, and the encoded image. A difference from the number of codes of the code used for encoding the encoded image output by the encoding means immediately before the output may be output.
上記の構成によれば、出力手段は、符号化手段が出力した符号化画像の符号化に用いた符号の符号数と、該符号化画像の直前に上記符号化手段が出力した符号化画像の符号化に用いた符号の符号数との差分を出力する。そして、差分を示す情報は、符号の数を示す情報よりも情報量が少ない。よって、より少ない情報量で符号化画像の符号化に用いた符号数を示す情報を出力することができる。
According to the above configuration, the output unit includes the number of codes used for encoding the encoded image output from the encoding unit and the encoded image output from the encoding unit immediately before the encoded image. The difference from the code number of the code used for encoding is output. The information indicating the difference has a smaller information amount than the information indicating the number of codes. Therefore, it is possible to output information indicating the number of codes used for encoding the encoded image with a smaller amount of information.
上記課題を解決するために、本発明に係る画像復号装置は、元画像を符号化した符号化画像および該符号化画像の符号化に用いられた符号の数である符号数を取得する取得手段と、上記取得手段が取得した符号数と、元画像の奥行き値を表現するための階調数との比である変換比を求め、求めた変換比を上記取得手段が取得した符号化画像の奥行き値に乗ずることによって符号化画像を復号する復号手段と、を備えていることを特徴としている。
In order to solve the above problems, an image decoding apparatus according to the present invention acquires an encoded image obtained by encoding an original image and a code number that is the number of codes used for encoding the encoded image. And a conversion ratio that is a ratio between the number of codes acquired by the acquisition unit and the number of gradations for expressing the depth value of the original image, and the calculated conversion ratio of the encoded image acquired by the acquisition unit And decoding means for decoding the encoded image by multiplying the depth value.
また、本発明に係る画像復号装置の制御方法は、元画像を符号化した符号化画像および該符号化画像の符号化に用いられた符号の数である符号数を取得する取得ステップと、上記取得ステップで取得した符号数と、元画像の奥行き値を表現するための階調数との比である変換比を求め、求めた変換比を上記取得ステップで取得した符号化画像の奥行き値に乗ずることによって符号化画像を復号する復号ステップと、を含むことを特徴としている。
In addition, the control method of the image decoding device according to the present invention includes an acquisition step of acquiring an encoded image obtained by encoding an original image and a code number that is the number of codes used for encoding the encoded image; A conversion ratio that is a ratio between the number of codes acquired in the acquisition step and the number of gradations for expressing the depth value of the original image is obtained, and the obtained conversion ratio is used as the depth value of the encoded image acquired in the acquisition step. And a decoding step of decoding the encoded image by multiplication.
上記の構成または方法によれば、符号化画像の奥行き値に対し、該符号化画像が符号化された符号の数と元画像の奥行き値を表現するための階調数との比である変換比を乗ずることにより符号化画像の奥行き値を復号するので、表現すべき階調数で表現された奥行き値の元画像に符号化画像を復号することができる。
According to the above configuration or method, for the depth value of the encoded image, conversion that is a ratio between the number of codes encoded in the encoded image and the number of gradations for expressing the depth value of the original image Since the depth value of the encoded image is decoded by multiplying by the ratio, the encoded image can be decoded to the original image of the depth value expressed by the number of gradations to be expressed.
なお、上記画像符号化装置および画像復号装置は、コンピュータによって実現してもよく、この場合には、コンピュータを上記各手段として動作させることにより上記画像符号化装置をコンピュータにて実現させる画像符号化装置の制御プログラム、上記画像復号装置をコンピュータにて実現させる画像復号装置の制御プログラム、およびこれらの少なくともいずれか一方を記録したコンピュータ読み取り可能な記録媒体も、本発明の範疇に入る。
Note that the image encoding device and the image decoding device may be realized by a computer. In this case, the image encoding device that causes the image encoding device to be realized by the computer by causing the computer to operate as the respective means. An apparatus control program, an image decoding apparatus control program for realizing the image decoding apparatus by a computer, and a computer-readable recording medium on which at least one of them is recorded also fall within the scope of the present invention.
以上、本発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこれらの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も本発明の適用範囲に含まれる。
Although the embodiments of the present invention have been described in detail with reference to the drawings, the specific configuration is not limited to these embodiments, and the design and the like within the scope not departing from the gist of the present invention are also included. Included in scope.
本発明は上述した実施の形態に限定されるものではなく、請求項に示した範囲で種々の変更が可能である。すなわち、請求項に示した範囲で適宜変更した技術的手段を組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
The present invention is not limited to the above-described embodiment, and various modifications can be made within the scope of the claims. That is, embodiments obtained by combining technical means appropriately changed within the scope of the claims are also included in the technical scope of the present invention.
また、発明の詳細な説明の項においてなされた具体的な実施態様または実施例は、あくまでも、本発明の技術内容を明らかにするものであって、そのような具体例にのみ限定して狭義に解釈されるべきものではなく、本発明の精神と特許請求事項との範囲内で、いろいろと変更して実施することができるものである。
The specific embodiments or examples made in the detailed description of the invention are intended to clarify the technical contents of the present invention, and are limited to such specific examples in a narrow sense. It should not be construed and can be implemented with various modifications within the spirit and scope of the present invention.
最後に、画像符号化装置1および画像復号装置2の各ブロック、特に視点画像取得部11、視点画像符号化部12、奥行き算出部13、奥行き値分析部14、奥行き値変換部15、奥行き画像符号化部16、撮影条件情報取得部17、多重化部18、分離部51、視点画像復号部52、奥行き画像復号部53、および奥行き値復号部54は、集積回路(ICチップ)上に形成された論理回路によってハードウェア的に実現してもよいし、CPU(central processing unit)を用いてソフトウェア的に実現してもよい。
Finally, each block of the image encoding device 1 and the image decoding device 2, particularly the viewpoint image acquisition unit 11, the viewpoint image encoding unit 12, the depth calculation unit 13, the depth value analysis unit 14, the depth value conversion unit 15, the depth image The encoding unit 16, the imaging condition information acquisition unit 17, the multiplexing unit 18, the separation unit 51, the viewpoint image decoding unit 52, the depth image decoding unit 53, and the depth value decoding unit 54 are formed on an integrated circuit (IC chip). It may be realized in hardware by a logic circuit that has been implemented, or may be realized in software using a CPU (central processing unit).
後者の場合、画像符号化装置1および画像復号装置2は、各機能を実現する制御プログラムの命令を実行するCPU、上記プログラムを格納したROM(read only memory)、上記プログラムを展開するRAM(random access memory)、上記プログラムおよび各種データを格納するメモリ等の記憶装置(記録媒体)などを備えている。そして、本発明の目的は、上述した機能を実現するソフトウェアである画像符号化装置1および画像復号装置2の制御プログラムのプログラムコード(実行形式プログラム、中間コードプログラム、ソースプログラム)をコンピュータで読み取り可能に記録した記録媒体を、上記の画像符号化装置1および画像復号装置2に供給し、そのコンピュータ(またはCPUやMPU(microprocessor unit))が記録媒体に記録されているプログラムコードを読み出し実行することによっても、達成可能である。
In the latter case, the image encoding device 1 and the image decoding device 2 include a CPU that executes instructions of a control program that realizes each function, a ROM (read only memory) that stores the program, and a RAM (random) that expands the program. access memory), a storage device (recording medium) such as a memory for storing the program and various data. An object of the present invention is to enable a computer to read program codes (execution format program, intermediate code program, source program) of control programs for the image encoding device 1 and the image decoding device 2, which are software that realizes the functions described above. Is supplied to the image encoding device 1 and the image decoding device 2, and the computer (or CPU or MPU (microprocessor unit)) reads and executes the program code recorded on the recording medium. Can also be achieved.
上記記録媒体としては、例えば、磁気テープやカセットテープ等のテープ類、フロッピー(登録商標)ディスク/ハードディスク等の磁気ディスクやCD-ROM(compact disc read-only memory)/MO(magneto-optical)/MD(Mini Disc)/DVD(digital versatile disk)/CD-R(CD Recordable)等の光ディスクを含むディスク類、ICカード(メモリカードを含む)/光カード等のカード類、マスクROM/EPROM(erasable programmable read-only memory)/EEPROM(electrically erasable and programmable read-only memory)/フラッシュROM等の半導体メモリ類、あるいはPLD(Programmable logic device)やFPGA(Field Programmable Gate Array)等の論理回路類などを用いることができる。
Examples of the recording medium include tapes such as a magnetic tape and a cassette tape, a magnetic disk such as a floppy (registered trademark) disk / hard disk, a CD-ROM (compact disk-read-only memory) / MO (magneto-optical) / Discs including optical discs such as MD (Mini Disc) / DVD (digital versatile disc) / CD-R (CD Recordable), IC cards (including memory cards) / optical cards, mask ROM / EPROM (erasable) Programmable read-only memory) / EEPROM (electrically erasable and programmable read-only memory) / semiconductor memory such as flash ROM, or logic circuits such as PLD (Programmable logic device) and FPGA (Field Programmable Gate Array) be able to.
また、画像符号化装置1および画像復号装置2を通信ネットワークと接続可能に構成し、上記プログラムコードを通信ネットワークを介して供給してもよい。この通信ネットワークは、プログラムコードを伝送可能であればよく、特に限定されない。例えば、インターネット、イントラネット、エキストラネット、LAN(local area network)、ISDN(integrated services digital network)、VAN(value-added network)、CATV(community antenna television)通信網、仮想専用網(virtual private network)、電話回線網、移動体通信網、衛星通信網等が利用可能である。また、この通信ネットワークを構成する伝送媒体も、プログラムコードを伝送可能な媒体であればよく、特定の構成または種類のものに限定されない。例えば、IEEE(institute of electrical and electronic engineers)1394、USB、電力線搬送、ケーブルTV回線、電話線、ADSL(asynchronous digital subscriber loop)回線等の有線でも、IrDA(infrared data association)やリモコンのような赤外線、Bluetooth(登録商標)、IEEE802.11無線、HDR(high data rate)、NFC(Near Field Communication)、DLNA(Digital Living Network Alliance)、携帯電話網、衛星回線、地上波デジタル網等の無線でも利用可能である。なお、本発明は、上記プログラムコードが電子的な伝送で具現化された、搬送波に埋め込まれたコンピュータデータ信号の形態でも実現され得る。
Further, the image encoding device 1 and the image decoding device 2 may be configured to be connectable to a communication network, and the program code may be supplied via the communication network. The communication network is not particularly limited as long as it can transmit the program code. For example, Internet, intranet, extranet, LAN (local area network), ISDN (integrated area services digital area), VAN (value-added area network), CATV (community area antenna television) communication network, virtual area private network (virtual area private network), A telephone line network, a mobile communication network, a satellite communication network, etc. can be used. The transmission medium constituting the communication network may be any medium that can transmit the program code, and is not limited to a specific configuration or type. For example, IEEE (institute of electrical and electronic engineers) 1394, USB, power line carrier, cable TV line, telephone line, ADSL (asynchronous digital subscriber loop) line, etc. wired such as IrDA (infrared data association) or remote control , Bluetooth (registered trademark), IEEE802.11 wireless, HDR (high data rate), NFC (Near field communication), DLNA (Digital Living Network Alliance), mobile phone network, satellite line, terrestrial digital network, etc. Is possible. The present invention can also be realized in the form of a computer data signal embedded in a carrier wave in which the program code is embodied by electronic transmission.
視点画像に対応する奥行き値を、遅延が少なく簡便な処理で圧縮できるので、奥行き値を用いて画像を処理する装置に画像データを送信する装置、例えば、立体画像や任意の視点における画像を作成する装置に画像データを送信する装置に好適である。
Depth values corresponding to viewpoint images can be compressed with simple processing with little delay, so devices that send image data to devices that process images using depth values, such as stereoscopic images and images at arbitrary viewpoints, are created It is suitable for an apparatus that transmits image data to an apparatus that performs such processing.
1 画像符号化装置
2 画像復号装置
14 奥行き値分析部(奥行き値取得手段、奥行き値分布作成手段、分割手段、符号割当手段)
15 奥行き値変換部(符号化手段、出力手段)
54 奥行き値復号部(取得手段、復号手段) DESCRIPTION OF SYMBOLS 1 Image coding apparatus 2Image decoding apparatus 14 Depth value analysis part (Depth value acquisition means, Depth value distribution creation means, Dividing means, Code allocation means)
15 Depth value converter (encoding means, output means)
54 Depth value decoding unit (acquisition means, decoding means)
2 画像復号装置
14 奥行き値分析部(奥行き値取得手段、奥行き値分布作成手段、分割手段、符号割当手段)
15 奥行き値変換部(符号化手段、出力手段)
54 奥行き値復号部(取得手段、復号手段) DESCRIPTION OF SYMBOLS 1 Image coding apparatus 2
15 Depth value converter (encoding means, output means)
54 Depth value decoding unit (acquisition means, decoding means)
Claims (12)
- 元画像における単位領域毎の奥行き値を符号化する画像符号化装置であって、
上記奥行き値を取得する奥行き値取得手段と、
上記奥行き値取得手段が取得した奥行き値の上記元画像における出現数を計数し、奥行き値毎の出現数の分布である奥行き値分布を作成する奥行き値分布作成手段と、
上記奥行き値分布作成手段が作成した奥行き値分布の形状に基づいて、奥行き値分布における奥行き値の最小値以上最大値以下の範囲を複数に分割する分割手段と、
上記分割手段が分割した各区間に含まれる奥行き値に対し、区間毎に異なる符号を割り当てる符号割当手段と、
上記符号割当手段が割り当てた符号で上記奥行き値を符号化することによって上記元画像を符号化し、符号化画像を出力する符号化手段と、
上記符号化手段が出力した符号化画像と、該符号化画像の符号化に用いた符号の数である符号数とを対応付けて出力する出力手段と、を備えていることを特徴とする画像符号化装置。 An image encoding device for encoding a depth value for each unit area in an original image,
Depth value acquisition means for acquiring the depth value;
A depth value distribution creating unit that counts the number of appearances of the depth value acquired by the depth value acquisition unit in the original image and creates a depth value distribution that is a distribution of the number of appearances for each depth value;
A dividing unit that divides the range of the depth value in the depth value distribution from the minimum value to the maximum value into a plurality of ranges based on the shape of the depth value distribution created by the depth value distribution creating unit;
Code assigning means for assigning a different code for each section to the depth value included in each section divided by the dividing means;
Encoding means for encoding the original image by encoding the depth value with a code assigned by the code assigning means, and outputting an encoded image;
An image comprising: an encoded image output by the encoding means; and an output means for outputting the number of codes, which is the number of codes used for encoding the encoded image, in association with each other Encoding device. - 上記分割手段は、上記奥行き値分布作成手段が作成した奥行き値分布における出現数の極大値の個数を用いて、奥行き値分布における奥行き値の最小値以上最大値以下の範囲を分割する個数を決定することを特徴とする請求項1に記載の画像符号化装置。 The dividing means determines the number to divide a range from the minimum value of the depth value to the maximum value in the depth value distribution using the maximum number of occurrences in the depth value distribution created by the depth value distribution creating means. The image coding apparatus according to claim 1, wherein:
- 上記極大値の個数が2以上の場合、上記分割手段は、該極大値の個数と該極大値の個数から1を減じた数との和の数から、奥行き値分布における奥行き値の最小値以上最大値以下の範囲を分割する個数を決定することを特徴とする請求項2に記載の画像符号化装置。 When the number of local maximum values is 2 or more, the dividing means calculates the sum of the number of local maximum values and the number obtained by subtracting 1 from the number of local maximum values, so that it is equal to or greater than the minimum value of depth values in the depth value distribution. The image coding apparatus according to claim 2, wherein the number of divisions of a range below the maximum value is determined.
- 上記割当手段は、奥行き値分布における奥行き値の最小値以上最大値以下の範囲のうち、該奥行き値の最大値と最小値とに異なる符号を割り当てるとともに、該最大値と該最小値とを除いた残りの範囲を分割した区間毎に異なる符号を割り当てることを特徴とする請求項1~3のいずれか1項に記載の画像符号化装置。 The assigning means assigns different codes to the maximum value and the minimum value of the depth value, and excludes the maximum value and the minimum value in a range of the depth value distribution from the minimum value to the maximum value. The image encoding device according to any one of claims 1 to 3, wherein a different code is assigned to each section obtained by dividing the remaining range.
- 上記分割手段は、上記奥行き値分布における奥行き値の最小値以上最大値以下の範囲において、上記奥行き値の出現数の極大値を起点として所定の範囲毎に上記奥行き値分布の傾きを求め、奥行き値分布の傾きの大きい所定の範囲を奥行き値分布の傾きの小さい所定の範囲よりも多く分割することを特徴とする請求項1に記載の画像符号化装置。 The dividing means obtains the slope of the depth value distribution for each predetermined range starting from the maximum value of the number of occurrences of the depth value in the range of the depth value minimum value to the maximum value in the depth value distribution. 2. The image coding apparatus according to claim 1, wherein a predetermined range having a large slope of the value distribution is divided more than a predetermined range having a small slope of the depth value distribution.
- 上記元画像は動画像であり、
上記出力手段は、上記符号化手段が出力した符号化画像の符号化に用いた符号の符号数と、該符号化画像の直前に上記符号化手段が出力した符号化画像の符号化に用いた符号の符号数との差分を出力することを特徴とする請求項1~5のいずれか1項に記載の画像符号化装置。 The original image is a moving image,
The output means is used for encoding the number of codes used for encoding the encoded image output by the encoding means and the encoded image output by the encoding means immediately before the encoded image. 6. The image coding apparatus according to claim 1, wherein a difference between the number of codes and the number of codes is output. - 元画像を符号化した符号化画像および該符号化画像の符号化に用いられた符号の数である符号数を取得する取得手段と、
上記取得手段が取得した符号数と、元画像の奥行き値を表現するための階調数との比である変換比を求め、求めた変換比を上記取得手段が取得した符号化画像の奥行き値に乗ずることによって符号化画像を復号する復号手段と、を備えていることを特徴とする画像復号装置。 Obtaining means for obtaining an encoded image obtained by encoding an original image and a code number which is the number of codes used for encoding the encoded image;
A conversion ratio, which is a ratio between the number of codes acquired by the acquisition unit and the number of gradations for expressing the depth value of the original image, is obtained, and the obtained conversion ratio is the depth value of the encoded image acquired by the acquisition unit. An image decoding apparatus comprising: decoding means for decoding an encoded image by multiplying by. - 請求項1~6のいずれか1項に記載の画像符号化装置を動作させる画像符号化装置制御プログラムであって、コンピュータを上記の各手段として機能させるための画像符号化装置制御プログラム。 An image encoding device control program for operating the image encoding device according to any one of claims 1 to 6, wherein the image encoding device control program causes a computer to function as each of the above means.
- 請求項7に記載の画像復号装置を動作させる画像復号装置制御プログラムであって、コンピュータを上記の各手段として機能させるための画像復号装置制御プログラム。 An image decoding device control program for operating the image decoding device according to claim 7, wherein the image decoding device control program causes a computer to function as each of the above-described means.
- 請求項8に記載の画像符号化装置制御プログラムおよび請求項9に記載の画像復号装置制御プログラムの少なくともいずれか一方を記録したコンピュータ読み取り可能な記録媒体。 A computer-readable recording medium on which at least one of the image encoding device control program according to claim 8 and the image decoding device control program according to claim 9 is recorded.
- 元画像における単位領域毎の奥行き値を符号化する画像符号化装置の制御方法であって、
上記奥行き値を取得する奥行き値取得ステップと、
上記奥行き値取得ステップで取得した奥行き値の上記画像における出現数を計数し、奥行き値毎の出現数の分布である奥行き値分布を作成する奥行き値分布作成ステップと、
上記奥行き値分布作成ステップで作成した奥行き値分布の形状に基づいて、奥行き値分布における奥行き値の最小値以上最大値以下の範囲を複数に分割する分割ステップと、
上記分割ステップで分割した各区間に含まれる奥行き値に対し、区間毎に異なる符号を割り当てる符号割当ステップと、
上記符号割当ステップで割り当てた符号で上記奥行き値を符号化することによって上記元画像を符号化し、符号化画像を出力する符号化ステップと、
上記符号化ステップで出力した符号化画像と、該符号化画像の符号化に用いた符号の数である符号数とを対応付けて出力する出力ステップと、を含むことを特徴とする画像符号化装置の制御方法。 A control method of an image encoding device for encoding a depth value for each unit area in an original image,
A depth value acquiring step for acquiring the depth value;
A depth value distribution creating step for counting the number of appearances of the depth value obtained in the depth value obtaining step in the image and creating a depth value distribution that is a distribution of the number of appearances for each depth value;
A dividing step of dividing a range of the depth value in the depth value distribution from the minimum value to the maximum value into a plurality based on the shape of the depth value distribution created in the depth value distribution creating step;
A code assigning step for assigning a different code for each section to the depth value included in each section divided in the dividing step;
An encoding step of encoding the original image by encoding the depth value with the code allocated in the code allocation step and outputting an encoded image;
An image encoding comprising: an encoded image output in the encoding step; and an output step of outputting the code number, which is the number of codes used for encoding the encoded image, in association with each other Control method of the device. - 元画像を符号化した符号化画像および該符号化画像の符号化に用いられた符号の数である符号数を取得する取得ステップと、
上記取得ステップで取得した符号数と、元画像の奥行き値を表現するための階調数との比である変換比を求め、求めた変換比を上記取得ステップで取得した符号化画像の奥行き値に乗ずることによって符号化画像を復号する復号ステップと、を含むことを特徴とする画像復号装置の制御方法。 An acquisition step of acquiring an encoded image obtained by encoding an original image and a code number that is the number of codes used for encoding the encoded image;
A conversion ratio that is a ratio between the number of codes acquired in the acquisition step and the number of gradations for expressing the depth value of the original image is obtained, and the obtained conversion ratio is obtained as the depth value of the encoded image obtained in the acquisition step. And a decoding step of decoding the encoded image by multiplying by a control method for an image decoding apparatus.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010-075137 | 2010-03-29 | ||
| JP2010075137A JP4860763B2 (en) | 2010-03-29 | 2010-03-29 | Image encoding apparatus, image encoding apparatus control method, control program, and recording medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2011122168A1 true WO2011122168A1 (en) | 2011-10-06 |
Family
ID=44711901
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2011/053727 WO2011122168A1 (en) | 2010-03-29 | 2011-02-21 | Image encoder apparatus, image decoder apparatus, image encoder apparatus control method, image decoder apparatus control method, control programs and recording medium |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP4860763B2 (en) |
| WO (1) | WO2011122168A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102510514A (en) * | 2011-12-29 | 2012-06-20 | Tcl集团股份有限公司 | Image processing method suitable for three-dimensional stereo display equipment |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5959911B2 (en) * | 2012-04-17 | 2016-08-02 | キヤノン株式会社 | Quantization apparatus and control method thereof |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002366963A (en) * | 2001-06-12 | 2002-12-20 | Ricoh Co Ltd | Method and device for processing image, imaging device and computer program |
| WO2004071102A1 (en) * | 2003-01-20 | 2004-08-19 | Sanyo Electric Co,. Ltd. | Three-dimensional video providing method and three-dimensional video display device |
| JP2005535203A (en) * | 2002-07-31 | 2005-11-17 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | Method and apparatus for encoding digital video signals |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09106458A (en) * | 1995-10-12 | 1997-04-22 | Dainippon Printing Co Ltd | Image processing method |
| JP2002342037A (en) * | 2001-05-22 | 2002-11-29 | Fujitsu Ltd | Disk device |
| JP2004318204A (en) * | 2003-04-10 | 2004-11-11 | Sony Corp | Image processing device, image processing method, and photographing device |
-
2010
- 2010-03-29 JP JP2010075137A patent/JP4860763B2/en not_active Expired - Fee Related
-
2011
- 2011-02-21 WO PCT/JP2011/053727 patent/WO2011122168A1/en active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002366963A (en) * | 2001-06-12 | 2002-12-20 | Ricoh Co Ltd | Method and device for processing image, imaging device and computer program |
| JP2005535203A (en) * | 2002-07-31 | 2005-11-17 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | Method and apparatus for encoding digital video signals |
| WO2004071102A1 (en) * | 2003-01-20 | 2004-08-19 | Sanyo Electric Co,. Ltd. | Three-dimensional video providing method and three-dimensional video display device |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102510514A (en) * | 2011-12-29 | 2012-06-20 | Tcl集团股份有限公司 | Image processing method suitable for three-dimensional stereo display equipment |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4860763B2 (en) | 2012-01-25 |
| JP2011211351A (en) | 2011-10-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101768857B1 (en) | Generation of high dynamic range images from low dynamic range images in multi-view video coding | |
| US8488870B2 (en) | Multi-resolution, multi-window disparity estimation in 3D video processing | |
| JP6027034B2 (en) | 3D image error improving method and apparatus | |
| CN112219398B (en) | Method and apparatus for depth coding and decoding | |
| JP7277372B2 (en) | 3D model encoding device, 3D model decoding device, 3D model encoding method, and 3D model decoding method | |
| JP5763184B2 (en) | Calculation of parallax for 3D images | |
| CN102549507B (en) | Selecting viewpoints for generating additional views in 3D video | |
| US20230068178A1 (en) | A method, an apparatus and a computer program product for volumetric video encoding and decoding | |
| US20100215251A1 (en) | Method and device for processing a depth-map | |
| JP2013527646A5 (en) | ||
| KR20090007384A (en) | Efficient encoding of multiple views | |
| JP7105062B2 (en) | Image processing device, content processing device, content processing system, and image processing method | |
| US20220217400A1 (en) | Method, an apparatus and a computer program product for volumetric video encoding and decoding | |
| JP4806088B1 (en) | Image conversion apparatus, image conversion apparatus control method, image conversion apparatus control program, and recording medium | |
| JP4860763B2 (en) | Image encoding apparatus, image encoding apparatus control method, control program, and recording medium | |
| JP2020120322A (en) | Distance image coding device and program of the same, and distance image decoding device and program of the same | |
| JP4764516B1 (en) | Multi-view image encoding device | |
| WO2021053261A1 (en) | A method, an apparatus and a computer program product for video encoding and video decoding | |
| WO2019185983A1 (en) | A method, an apparatus and a computer program product for encoding and decoding digital volumetric video | |
| WO2012060168A1 (en) | Encoder apparatus, decoder apparatus, encoding method, decoding method, program, recording medium, and encoded data | |
| Mantiuk et al. | Perception-inspired high dynamic range video coding and compression | |
| WO2012060179A1 (en) | Encoder apparatus, decoder apparatus, encoding method, decoding method, program, recording medium, and data structure of encoded data | |
| JP2023543048A (en) | How to encode and decode multi-view video |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 11762408 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 11762408 Country of ref document: EP Kind code of ref document: A1 |