WO2010103962A1 - Optical information reproduction method, optical head, and optical disc apparatus - Google Patents
Optical information reproduction method, optical head, and optical disc apparatus Download PDFInfo
- Publication number
- WO2010103962A1 WO2010103962A1 PCT/JP2010/053387 JP2010053387W WO2010103962A1 WO 2010103962 A1 WO2010103962 A1 WO 2010103962A1 JP 2010053387 W JP2010053387 W JP 2010053387W WO 2010103962 A1 WO2010103962 A1 WO 2010103962A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- optical
- light
- path length
- optical path
- length difference
- Prior art date
Links
Images














Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/004—Recording, reproducing or erasing methods; Read, write or erase circuits therefor
- G11B7/005—Reproducing
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/08—Disposition or mounting of heads or light sources relatively to record carriers
- G11B7/09—Disposition or mounting of heads or light sources relatively to record carriers with provision for moving the light beam or focus plane for the purpose of maintaining alignment of the light beam relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following
- G11B7/0941—Methods and circuits for servo gain or phase compensation during operation
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/12—Heads, e.g. forming of the optical beam spot or modulation of the optical beam
- G11B7/135—Means for guiding the beam from the source to the record carrier or from the record carrier to the detector
- G11B7/1359—Single prisms
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B2007/0003—Recording, reproducing or erasing systems characterised by the structure or type of the carrier
- G11B2007/0009—Recording, reproducing or erasing systems characterised by the structure or type of the carrier for carriers having data stored in three dimensions, e.g. volume storage
- G11B2007/0013—Recording, reproducing or erasing systems characterised by the structure or type of the carrier for carriers having data stored in three dimensions, e.g. volume storage for carriers having multiple discrete layers
Definitions
- the present invention relates to a high S / N ratio of a reproduction signal of an optical disc apparatus.
- Optical discs have reached the limit of the resolution of the optical system, resulting in the commercialization of a blue-ray disc using a blue semiconductor laser and a high NA objective lens.
- the recording layer will be multilayered in the future. It is thought to be influential.
- the reflectance from a specific recording layer must be reduced because the amount of light detected from each recording layer needs to be substantially equal.
- the optical disk needs to have a large capacity and a high dubbing speed for video and the like, the data transfer speed is also increasing, and the S / N ratio of the reproduced signal cannot be secured sufficiently. Therefore, in order to simultaneously advance the multilayering and speeding up of the recording layer in the future, it is essential to increase the S / N of the detection signal.
- Patent Document 1 and Patent Document 2 relate to increasing the S / N ratio of a reproduction signal of a magneto-optical disk, and branch light before irradiating the optical disk with light from a semiconductor laser, and reflect light that does not irradiate the optical disk from reflected light from the optical disk. Is intended to amplify the amplitude of a weak signal by increasing the amount of light that does not irradiate the optical disk.
- the original incident polarization component and the incident polarization direction caused by the polarization rotation by the magneto-optical disk Detection is performed by interfering orthogonal polarization components and amplifying the orthogonal polarization components with incident polarization. Therefore, if the original incident polarization component is increased, the signal can be increased, but the intensity of the light incident on the optical disk must be kept below a certain level in order not to erase or overwrite the data. There is.
- the light to be interfered with the signal light is separated in advance, and this is interfered with the signal light without condensing it on the disk, and the intensity of the light to be interfered for signal amplification is This makes it possible to increase the intensity regardless of the light intensity on the disk surface.
- the S / N ratio compared to the noise of the amplifier that converts the photocurrent from the photodetector into a voltage can be increased as the intensity is increased within the range allowed by the light intensity.
- Patent Document 3 relates to a high S / N ratio of a reproduction signal of an optical disk using a photochromic medium, and in the same manner as in Reference Documents 1 and 2, a signal is generated by interfering light that does not irradiate an optical disk with reflected light from the optical disk. Aiming for amplification. Also for an optical disk using a photochromic medium, the higher the incident light intensity for signal reproduction, the faster the medium is deteriorated. Therefore, similarly to the magneto-optical disk, the intensity of light applied to the recording medium is limited.
- Patent Document 1 interference light intensity is detected by causing two lights to interfere with each other. At this time, the optical path length of the reflected disk light to be interfered is made variable so as to secure the interference signal amplitude.
- Patent Document 2 Patent Document 3, and Patent Document 4, differential detection is performed in addition to interference light intensity detection. As a result, the intensity component of each light that does not contribute to the signal is canceled and the signal amplitude is doubled to achieve a high S / N ratio.
- an interference signal obtained by interference between two lights depends on a phase difference (optical path length difference) between the two lights to be interfered.
- Patent Document 1 stabilizes the optical path length difference by making a triangular prism inserted in the optical path movable in the direction of the incident optical axis.
- Patent Document 4 the entire optical interference system is caused to follow the optical disc, thereby canceling the optical path length difference caused by the surface blur caused by the rotation of the optical disc.
- the optical path length difference is stabilized by making the position of the mirror that reflects the light not hitting the optical disc movable in the optical axis direction.
- Patent Document 5 a plurality of interference signals having different interference states are generated from the optical path length difference, and an amplified signal that does not depend on the phase difference is output by generating a signal by calculating these interference signals.
- the object to be moved is made to follow about 600 ⁇ m of the current optical disc surface deviation, and the phase difference between the signal light and the reference light is fixed, that is, the light source It is necessary to perform positioning with an accuracy of about several nanometers sufficiently smaller than the wavelength.
- unevenness in the thickness of the cover layer provided on the optical disk also causes the optical path length difference to be disturbed.
- a method for controlling the optical path length corresponding to the uneven thickness is not particularly described.
- Patent Document 5 employs a method of obtaining an output that does not depend on the optical path length difference, so the above problem does not occur.
- a signal processing process for obtaining an output that does not depend on the optical path length difference non-linear computation or the like is performed. Since complicated arithmetic processing is required, the burden on the signal processing circuit increases. Also, since the output does not depend on the optical path length difference from multiple interference signals, thermal noise mixed into each interference signal is added and noise increases, or noise is mixed due to imperfect computation processing Therefore, the above arithmetic processing becomes a factor that degrades the signal quality. Furthermore, in order to obtain an output that does not depend on the optical path length difference, high accuracy is required for various parameters of the optical system, and the construction of the optical system becomes very difficult.
- a first object of the present invention is to provide an interference-type optical information signal reproduction method that can easily adjust the optical path difference between two lights, has a high signal amplification effect, and is suitable for downsizing an optical system. Is to provide.
- a second object of the present invention is to provide an optical head equipped with an interference type optical information signal detection system that can easily adjust an optical path difference between two lights, has a high signal amplification effect, and is suitable for downsizing of an optical system. Is to provide.
- a third object of the present invention is to provide an optical disc apparatus equipped with an interference type optical information signal detection system that can easily adjust an optical path difference between two lights, has a high signal amplification effect, and is suitable for downsizing of an optical system. Is to provide.
- the above-described problem is solved by performing the length adjustment in three parts: coarse adjustment of the optical path length difference, fine adjustment, and optical path length difference fixed position adjustment.
- the rough adjustment of the optical path length difference is an adjustment for canceling the optical path difference between the signal light and the reference light, which is generated based on fluctuations in the relative distance between the optical head and the optical information recording medium (for example, optical disc surface shake).
- the definition of the fine adjustment of the optical path difference and the adjustment of the optical path length difference fixed position will be described later.
- An interference type optical disc device, an optical head, and a signal reproducing method that can be manufactured in the same size as a conventional disc device, have a high signal amplification effect, and are inexpensive are realized.
- the basic embodiment of the present invention The figure showing the detail of the detector for servo detection.
- the figure which shows an optical head in case the detector which detects an interference signal is three.
- the figure which shows an optical head in case a reference light reflection means and an interference light detection optical system differ.
- the figure which shows the structure of the interference optical system and detector of the optical head of FIG. The figure which shows the structure of the detector of the optical head of FIG.
- the figure which shows an optical head in case a corner cube prism and an objective lens are mounted in a separate actuator.
- Explanatory drawing of the optical path length difference fine adjustment by a phase jump Explanatory drawing of the method of performing an optical path length fine adjustment with the combination of an optical path length zero position adjustment mechanism and an optical path length difference fine adjustment mechanism.
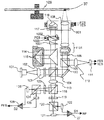
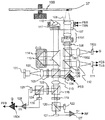
- FIG. 1 shows an example of the overall configuration of the optical disk apparatus of the present embodiment.
- the optical disk apparatus shown in FIG. 1 roughly includes disk support means including a spindle motor 77 that holds the optical disk 109, an optical head (optical pickup) 2001 that inputs / outputs various data to / from the optical disk 109, and operations of the entire optical disk apparatus.
- the microprocessor 27 on which the firmware to be controlled operates, the reproduction signal processing block 2 that performs various processes on the reproduction signal of the optical head, the memory 29 that stores various control parameters and control tables, and the optical head 2001 are mounted.
- Each optical element constituting the optical head system described below is integrally formed as an optical module.
- the optical head optical system of the present embodiment is generated by an interference optical system for guiding the light emitted from the laser light to the optical disc and reflecting it, and causing the reflected light and the reference signal to interfere to generate interference light.
- the detection optical system is configured to separate the interference light, add a phase difference to each of the separated interference lights, and detect with a plurality of detectors.
- the polarization beam splitter 104 transmits almost 100% of p-polarized light (hereinafter referred to as horizontal polarization) incident on the separation surface and reflects almost 100% of s-polarized light (hereinafter referred to as vertical polarization), that is, transmitted light and reflected light. It has a function of separating light. At this time, the intensity ratio of the transmitted light and the reflected light can be adjusted by adjusting the rotation angle of the ⁇ / 2 plate 103 around the optical axis.
- the transmitted light is incident on the special polarization beam splitter 105.
- the special polarizing beam splitter 105 has a property of transmitting 100% of horizontally polarized light, reflecting part of vertically polarized light, and partially transmitting. Therefore, the incident light is 100% transmitted, is transmitted through the ⁇ / 4 plate 106 and converted into circularly polarized light, passes through the beam expander 1101 that corrects spherical aberration, and is mounted on the two-dimensional actuator 107. Thus, the light is condensed on the recording layer on the optical disk 109.
- Reflected light from the optical disk returns to the same optical path, is converted into parallel light by the objective lens 108, and is 90 ° polarization direction from the time of first incident by passing through the ⁇ / 4 plate 106 again. Becomes the linearly polarized light rotated.
- the light is incident on the special polarization beam splitter 105, and a part of the light is transmitted and a part of the light is reflected by the above properties.
- the reflected light is incident on the detector 111 by the cylindrical lens 110.
- the detector 111 is divided into four detectors 201, 202, 203, and 204 as shown in FIG. 2.
- the detector 111 shown in FIG. 2 includes a logical operation circuit for executing the operation AB ⁇ C + D and the operation AB + CD.
- the light transmitted through the special polarization beam splitter 105 enters the polarization beam splitter 104. Then, since the polarized light is rotated 90 degrees, it is reflected and enters the condenser lens 113 (hereinafter, this reflected light is referred to as reference light).
- this reflected light is referred to as reference light.
- the light emitted from the semiconductor laser 101 and reflected by the polarization beam splitter 104 is reflected by the reflecting prism 115 mounted on the movable portion 114 and enters the corner cube prism 116 mounted on the two-dimensional actuator 107.
- the corner cube prism 116 is an element that reflects incident light in the opposite direction.
- the incident light is incident on the vertex formed by the three reflecting surfaces of the corner cube prism 116.
- the light reflected thereby returns along the same optical path and enters the polarization beam splitter 104.
- the disturbance is compensated by the polarization compensator 117 inserted in the middle of the optical path, and the return light is polarized with respect to the forward light. It is rotated 90 degrees.
- the reflected light from the corner cube prism 116 passes through the polarization beam splitter 104 and enters the condensing lens 113 coaxially with the reflected light from the optical disc being orthogonal to each other.
- interference light between the reference light and the signal light is formed by the polarization beam splitter 104.
- the signal light and the reference light are orthogonal, and the interference light is called in the sense that the net polarization state differs depending on the phase relationship between the signal light and the reference light.
- Interference (appearing as a change in intensity) occurs only after being separated by the polarization beam splitters 120 and 124 in the interference optical system described below.
- the two lights incident on the condenser lens are reflected and transmitted by the non-polarizing beam splitter 118 at a ratio of 1: 1, respectively.
- the transmitted light is transmitted through the ⁇ / 2 plate 119 and the polarization is rotated by 45 degrees, and then separated by the polarization beam splitter 120 into a horizontal polarization component and a vertical polarization component, and the separated lights are detected by the detectors 121 and 122. Detected by.
- the light reflected by the non-polarizing beam splitter 118 passes through a ⁇ / 4 plate 123 whose optical axis direction is set to 45 degrees with respect to the horizontal direction, and then is separated into a horizontal polarization component and a vertical polarization component by the polarization beam splitter 124.
- the separated lights are detected by detectors 125 and 126.
- the output signals of the detectors 121 and 122 are input to the differential circuit 127, and the differential signal D1 is output. This becomes a reproduction signal (RF).
- the output signals of the detectors 125 and 126 are input to the differential circuit 128, and the differential signal D2 is output.
- the detectors 125 and 126 have a sufficiently narrower band than the reproduction signal, and the differential signal is output in a state where the reproduction signal component is removed.
- phase error signal PES
- the piezo element 129 expands and contracts according to the driving voltage, moves the mirror 130 attached on the optical path for signal light of the interference optical system back and forth, and adjusts the optical path length of the signal light to adjust the signal light and the reference light. It has a function of adjusting the phase difference (hereinafter referred to as interference phase) (interference phase adjustment is hereinafter referred to as optical path length difference fine adjustment). That is, in the present embodiment, the piezo element 129 and the mirror 130 constitute an optical path length difference fine adjustment unit.
- the optical path length difference between the signal light and the reference light needs to be set within about the coherence length of the light source.
- the movable unit 114 moves the reflecting prism 115 in the optical axis direction of the incident light according to the layer to be read of the multilayer optical disk, the type of the disk, etc. Adjustment is performed so that the difference is sufficiently smaller than the coherence length of the light source and becomes an integral multiple of the wavelength (hereinafter, this adjustment is referred to as optical path length difference fixed position adjustment). That is, in this embodiment, the reflecting prism 115 and the movable portion 114 constitute an optical path length difference fixed position adjusting unit.
- the amount of movement of the movable unit 114 is determined by the microprocessor 27, and a predetermined amount of movement determined in advance according to the layer to be read from the multilayer optical disk, the type of the disk, etc. is instructed to the movable unit.
- the microprocessor 114 may have a function of learning a movement amount that maximizes the reproduction signal amplitude, and the movement amount set thereby may be used.
- the optical path length between the optical disk and the optical head also changes due to a change in the relative distance from the optical disk, such as surface deflection, but the change in the optical path length difference that occurs due to the change in the relative distance from the optical disk This is much larger than the change in optical path length difference caused by fluctuations in the optical system.
- Such a large change in the optical path length difference is offset by the corner cube prism 116 being integrally mounted on the actuator 107 together with the objective lens 108. More specifically, the two-dimensional actuator 107 is closed-loop controlled by the defocus signal so that the distance between the objective lens 108 and the optical disk is constant (hereinafter referred to as focus servo), and the corner cube prism 116 is integrated.
- the change in the optical path length of the signal light is equal to the change in the optical path length of the reference light, so that the optical path length difference is offset. That is, by this mechanism, the focus servo is driven to perform coarse adjustment of the optical path length difference at the same time (hereinafter, adjustment for compensating for the change in optical path length difference due to optical disc surface deflection is performed. Called).
- the fixed position adjustment, coarse adjustment, and fine adjustment of the optical path length difference are basically performed in this order. More specifically, first, the fixed position is adjusted according to the type of the disc and the layer to be read of the multilayer optical disc. Next, the focus servo is driven (this operation is the optical path length difference coarse adjustment), and finally the optical path length difference fine adjustment is performed.
- the optical path length difference adjusting means requires a stroke (typically about 1 mm) for following the surface blur of the optical disc and a positioning accuracy (about several nm) for keeping the interference phase constant.
- a stroke typically about 1 mm
- a positioning accuracy about several nm
- the burden on the adjusting mechanism is greatly improved by entrusting coarse adjustment of the stroke and fine adjustment of the positioning accuracy.
- the fine adjustment of the optical path length difference is not to fix the optical path length difference strictly to zero, but to fix the optical path length difference at a position that is an integral multiple of the wavelength.
- the interference phase is fixed to zero, but the optical path length difference is about the coherence length or more, and a situation in which sufficient signal amplitude cannot be obtained occurs.
- the optical path length difference can always be fixed near zero (range sufficiently smaller than the coherence length) at the time of fine adjustment.
- An interference signal amplitude can be obtained. That is, by separately performing these three types of optical path length difference adjustments, it is possible to realize optical path length difference adjustments with simple elements and to deal with various types of optical discs.
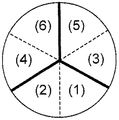
- the corner cube prism 116 is formed by cutting out a medium such as glass to form three surfaces of a cube. Incident light to the corner cube prism 116 is reflected by these three surfaces and is emitted as return light in a direction opposite to the incident light.
- a phase difference corresponding to a predetermined incident angle occurs between the p-polarized light and the s-polarized light with respect to the incident surface. For this reason, the return light is disturbed in polarization and wavefront.
- FIG. 3B is a view when the corner cube prism 116 is viewed from the direction of incident light, and different polarization disturbances occur in the regions (1), (2), (3), (4), (5), and (6) shown here. appear.
- the bold line in the figure represents the boundary line between the reflecting surfaces.
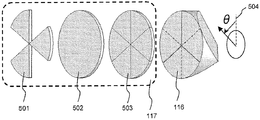
- a polarization compensation element 117 composed of a three-divided phase plate 501, a ⁇ / 4 plate 502, and a six-divided ⁇ / 2 plate 503 may be inserted.
- the ⁇ / 4 plate and the 6-divided ⁇ / 2 plate not only compensate for the polarization, but also have a function of rotating the polarization of the return light by 90 degrees with respect to the incident light.
- the three-divided phase plate generates a predetermined phase difference ⁇ p ⁇ s ( ⁇ p and ⁇ s are phases generated in horizontal polarization and vertical polarization, respectively) between horizontal polarization and vertical polarization in a specific region. It has the role of compensating for the phase difference between the region that passes through the element and the region that does not pass through, and aligning the wavefront of the return light.
- Table 1 shows set values of a three-divided phase plate, a ⁇ / 4 plate, and a six-divided ⁇ / 2 plate when the wavelength of light is 405 nm and the medium of the corner cube prism 116 is BK7.
- the angle is defined such that the vertical polarization direction 504 is 0 degree and the counterclockwise direction is positive when viewed from the incident light direction.
- Es is an electric field of signal light
- Er is an electric field of reference light
- the first component of the vector represents horizontal polarization
- the second component represents vertical polarization.
- This light is split into transmitted light and reflected light by a non-polarizing beam splitter 118, and the transmitted light passes through a ⁇ / 2 plate 119 having a fast axis in the direction of 22.5 degrees when viewed from the horizontal polarization direction. .
- Jones vector is
- the light reflected by the non-polarizing beam splitter 118 passes through a ⁇ / 4 plate 123 having a fast axis in the direction of 45 degrees as viewed from the horizontal polarization direction.
- Jones vector is
- the detection signals of the four detectors 121, 122, 125, 126 are respectively
- ⁇ is the conversion efficiency of the detector.
- ⁇ is the difference between the phase of the signal light and the phase of the reference light, that is, the interference phase. If these are respectively A1, A2, A3, A4, the differential signals D1, D2 are respectively
- the electric field Es of the signal light is amplified by the electric field Er of the reference light. Therefore, even if the Es is small due to the low reflectivity of the optical disk and the signal cannot be reproduced correctly even if the signal light is detected directly, the signal can be amplified and reproduced correctly.
- the interference phase ⁇ varies with time.
- the interference phase ⁇ is between the optical path length difference ⁇ L and the wavelength ⁇ of the light source.
- the optical path length difference In order to keep the interference phase constant, the optical path length difference must be suppressed to an accuracy sufficiently smaller than the wavelength of the light source, that is, within about 10 nanometers. As described above, the optical path length difference is adjusted to be zero by the actuator 107 and the movable portion 114. However, in the control of the actuator by a normal defocus signal, an error of several tens of nanometers is present in the focal position as a residual. In addition to the remaining (no problem when acquiring a normal reproduction signal), an extra optical path length difference occurs due to a slight tilt of the actuator during control, or an optical path length difference error due to an optical disc cover layer thickness error. Usually, an error of about several ⁇ m remains.
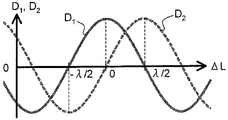
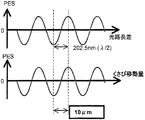
- FIG. 5 shows changes in D1 and D2 with respect to the optical path length difference.
- ⁇ L 0 at which D1 (RF signal) is maximum
- D2 is zero, which is an S-shaped curve just like a focus error signal or a track error signal.
- the interference phase can be controlled by using this signal as a phase error signal and performing closed loop control (hereinafter referred to as phase servo) so as to be always zero.
- phase servo closed loop control
- this error signal is fed back to the drive voltage 129 of the piezo element and the mirror 130 is moved in the front-rear direction to control the optical path length (interference phase).
- the optical path length difference when the optical path length difference is shifted to a positive value, the driving voltage of the piezo element increases, the mirror is pushed forward, the optical path length of the signal light is shortened, and the optical path length difference is in the negative direction. Conversely, when the optical path length difference moves in the negative direction, the optical path length difference moves in the positive direction. In this way, the interference phase can be kept at zero, and a stable amplified signal can be obtained.
- a is a signal amplification factor in the differential signal D1
- r, b1, b2, and ⁇ are constants indicating the characteristic error amount of the optical head optical system itself
- r is the differential signal D1 and the differential signal D2.
- Ratio of the maximum amplitude of each fluctuation component included in 1 b1 is a DC signal component included in the differential signal D1
- b2 is a DC signal component included in the differential signal D2
- ⁇ is the order of the differential signals D1 and D2. It is a phase difference.
- the differential signal outputs D1 and D2 of the optical head including the above error amount are expressed as shown in FIG.
- (1) in the figure represents the offset error (b2)
- D2 takes a non-zero value in the phase where D1 takes the maximum value. Therefore, if the phase servo is driven as it is, the phase is not locked to an appropriate phase, and the amplification factor of the reproduction signal decreases. .
- an offset is given to D2, so that D2 becomes zero at a position where the phase difference is zero. Note that offset and gain errors also occur in D1, but can be sufficiently removed by a signal processing system equivalent to the conventional one.
- the square of the output of this method may be treated as a reproduction signal.
- the reproduction signal output is proportional to the signal light intensity, as in the case of conventional optical disc signals such as DVD and Blu-ray disc, a conventional signal processing system can be used.
- FIG. 7 shows an example of the configuration of an optical disc apparatus when the detection optical system of the optical head is configured using three detectors.
- other components such as a signal processing circuit and a processor are the same as those of the optical disc apparatus shown in FIG.
- the phase difference between the signal light and the reference light is 0 degrees, 120 degrees, and 240 degrees on each detector, respectively.
- the light that has passed through the condenser lens 113 is divided into three light beams by non-polarizing beam splitters 701 and 702, and after passing through polarizers 703, 704, and 705 that transmit 45-degree polarized light, respectively, detectors 706, 707, 708 is detected.
- detectors 706, 707, 708 is detected.
- a phase plate 709 that generates a first phase difference between the signal light and the reference light
- the other is a second phase difference between the signal light and the reference light.
- Each of the phase plates 710 to be generated is inserted.
- the phase plate is set so that the first phase difference is 60 degrees and the second phase difference is ⁇ 60 degrees.
- the phase difference is a signed magnitude of the phase of the vertical polarization component with respect to the phase of the horizontal polarization component generated in the phase plate.
- the non-polarizing beam splitter 701 has a ratio of transmittance to reflectance of 1: 2, and the non-polarizing beam splitter 702 has the same transmittance and reflectance so that the amount of light on each detector is equal. Use things.
- the detector 708 has interference light having no phase difference between the signal light and the reference light
- the detector 706 has interference light having the first phase difference
- the detector 710 has Interfering light having a second phase difference is input.
- the intensity of the interference light having no phase difference is I1
- the intensity of the interference light having the first phase difference is I2
- the intensity of the interference light having the second phase difference is I3, I1, I2 and I3 can be expressed as follows.
- the differential signal represented by Equation 21 is a signal obtained by subtracting the interference light intensity output with a phase difference of 180 degrees from the average value of the interference light intensity output with the first phase difference and the interference light intensity output with the second phase difference.
- the differential signal represented by Equation 22 is obtained by multiplying the difference signal between the interference light intensity output having the first phase difference and the interference light intensity output having the second phase difference by ⁇ 3 / 2. is there.
- the same effect can be obtained by using D1 as the reproduction signal and D2 as the phase error signal as described above.
- the same effect can be obtained even with a smaller number of detector points. Since an error caused by an optical head assembly error or the like is superimposed on the differential signal detected by the actual optical system, the signal processing may be performed by performing the offset processing described with reference to FIG.
- FIG. 8 shows still another configuration example of the interference optical system and the detection optical system.
- the components other than the optical head are the same as those of the optical disk apparatus shown in FIG.
- a mirror 801 and a condensing lens 802 that condenses the incident light beam on the mirror are used as reference light reflecting means instead of the corner cube prism 116 and the polarization compensating element 117. It is installed. Even with such a configuration, similarly to the corner cube prism 116, it is possible to suppress the degradation of the interference signal amplitude due to the tilt of the element.
- an optical system for obtaining an interference signal includes an interference optical element 803 and a detector 804.
- the interference optical element 803 includes a non-polarization diffraction element 901, an anisotropic medium 902, and a Wollaston prism 903.
- the incident signal light is vertically polarized light and the reference light is horizontally polarized light
- the incident light is first divided into zero-order light and first-order light by the non-polarization diffraction grating 901 and is incident on the anisotropic medium 902.
- the first-order diffracted light is emitted with its direction changed in the horizontal direction with respect to the incident light.
- the optical axis of the anisotropic medium faces the traveling direction of the 0th-order light, only the 1st-order diffracted light has a delay between the signal light and the reference light, and the delay is ⁇ / 2 (the optical path length difference).
- the thickness of the medium is set so that ⁇ / 4).
- the non-polarization diffraction grating 901, the anisotropic medium 902, and the Wollaston prism 903 have the same functions as the half beam splitter 118, the ⁇ / 4 plate 123, and the polarization beam splitter 120, respectively.
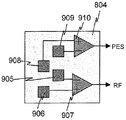
- the detector Details of the detector are as shown in FIG. 9B.
- the light receiving units 905, 906, 907, and 908 correspond to the detectors 121, 122, 125, and 126 shown in FIG. 1, respectively, and a reproduction signal and a phase error signal are obtained by the differential circuits 907 and 910, respectively.
- the differential circuits 907 and 910 are incorporated in the detector 904, and the output of the difference between the detection currents of the light receiving unit by the differential circuit is converted into a voltage signal by the transimpedance amplifier.
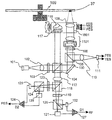
- the optical path length difference control mechanism for executing the optical path length difference fixed position adjustment may be arranged on the reference light optical path instead of the reflected light optical path of the interference optical system as shown in FIG.
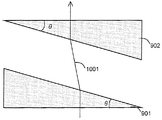
- FIG. 10 shows a configuration example in which a pair of wedge-shaped prisms 1001 and 1002 is arranged between the aberration correction element 117 mounted on the two-dimensional actuator 107 and the polarization beam splitter 104 as a control mechanism for the optical path length difference. .
- the phase error signal is fed back to the set of wedge-shaped prisms 1001 and 1002 via a servo circuit 79 (not shown), and phase control is executed.
- FIG. 10 shows a configuration example in which a pair of wedge-shaped prisms 1001 and 1002 is arranged between the aberration correction element 117 mounted on the two-dimensional actuator 107 and the polarization beam splitter 104 as a control mechanism for the optical path length difference.
- the phase error signal is fed back to the set of wedge-shaped prisms 1001 and 1002 via
- FIG. 11 shows a relative arrangement relationship between the pair of wedge-shaped prisms 1001 and 1002.
- One prism (prism 1002 in this embodiment) is mounted on the actuator 1003, and the optical path length can be controlled by moving the actuator in the optical axis direction.
- the optical path length can also be controlled by moving the actuator in a direction perpendicular to the optical axis (left and right direction with respect to the paper surface).
- the inclination angles of wedge prisms 1001 and 1002 see FIG.
- FIG. 13 and FIG. 14 show another configuration example of the optical path length difference coarse adjustment mechanism.
- the corner cube prism 116 is mounted on the same actuator as the objective lens 108 as a rough adjustment mechanism for the optical path length difference.
- the defocus signal FES detected by the detector 111 is input to both the two-dimensional actuator 107 and the actuator 1301 on which the corner cube prism 116 is mounted via the servo circuit 79, whereby the optical path length.
- a rough adjustment of the difference can be realized.
- the configuration shown in FIG. 13 can reduce the weight load on the actuator alone as compared with the configurations shown in FIGS.
- FIG. 14 shows a configuration in which the movable portion 114 and the prism mirror 115 are omitted from the configuration shown in FIG.
- the optical path length difference fixed position adjustment is executed by the actuator 1301.
- a signal obtained by adding a DC component to the defocus signal may be input, and the optical path length difference fixed position may be adjusted by changing the magnitude of the DC component.
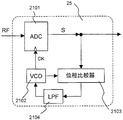
- FIG. 20 shows a specific example of the circuit block configuration of the signal processing circuit 25.
- the reproduction signal RF is digitized by the AD conversion circuit 2101 to obtain a digital signal output S.
- the digital signal output S and the output of the voltage controlled variable frequency oscillator (VCO) 2102 are phase-compared by the phase comparator 2103, and the output of the phase comparator is averaged by the low-pass filter (LPF) 2104. And fed back to the control input of the VCO.
- VCO voltage controlled variable frequency oscillator
- a phase-controlled clock output (CK) is obtained by a phase-locked loop (PLL) circuit constituted by a phase comparator 2103, a VCO 2102, and an LPF 2104, and AD conversion timing is controlled.
- the digital reproduction signal S is input to the demodulation circuit 24 and the address detection circuit 23 after appropriate digital equalization processing, and sent to the memory 29 and the microprocessor 27 as user data by the decoding circuit 26.
- the microprocessor controls the servo circuit 79 and the automatic position control means 76 according to an instruction from the host device 99, and positions the light spot 37 at an arbitrary address.
- the microprocessor 27 controls the laser driver 28 depending on whether the instruction from the host device is reproduction or recording, and causes the laser 101 to emit light with an appropriate power / waveform.
- the beam expander 1101 and the movable unit 114 are moved in the optical axis direction and fixed at a position where the signal quality is the best.
- the servo circuit 79 controls the two-dimensional actuator 107 based on the defocus signal and the track shift signal, and is focused on the recording surface of the optical disc 109 so as to follow the recording track. Further, the piezo element 801 is controlled based on the phase error signal generated from the differential circuit 128 so that the interference phase becomes zero.
- FIG. 21 is a flowchart showing an example of a procedure for controlling the movable part and the actuator.
- coarse adjustment is performed for the defocus signal, the track shift signal, the optical path length difference fixed position, and the spherical aberration correction amount (the order is arbitrary). It is only necessary to remove the electrical offset for the focus error signal and the track error signal, and the optical path length difference fixed position and the spherical aberration correction amount should be set to specific values according to the type of disk, the layer number to be reproduced, and the like. Good.
- the focus servo and the track servo are driven in this order based on the focus error signal and the track error signal.
- the optical path length difference is adjusted by driving the movable portion 114 so that the amplitude of the phase error signal is maximized (optical path length difference fixed position coarse adjustment).
- the phase servo is driven based on the phase error signal. Since the playback signal stabilized at this point can be acquired, the focus error signal offset, the track error signal offset, the optical path length difference fixed position, and the spherical aberration correction amount are respectively monitored while finally monitoring the reproduction signal quality. A position where the reproduction signal quality is the best is searched, learned and set (FES offset fine adjustment, TES offset fine adjustment, optical path length fixed position fine adjustment, spherical aberration correction fine adjustment).
- phase jump As described below, the phase error signal when the optical path length difference changes is as shown in FIG.
- the black circle in the figure is the position of phase zero, and is fixed to one of these during phase servo driving. At this time, the position of the adjacent black circle can be moved by changing the optical path length difference by an amount corresponding to the period of the position error signal PES (hereinafter referred to as phase jump).
- the control is realized by supplying a phase jump signal for generating a phase jump to a fine adjustment means (for example, the mirror 130 and the piezo element 129 in FIG. 1) of the optical path length difference.
- the phase jump signal is composed of a movement pulse for moving to a target position and a braking pulse for stopping movement near the target position, and is generated by a servo signal circuit. Therefore, since it is possible to move to an arbitrary phase zero position by the phase jump, it is only necessary to search, learn and set a place where the reproduction signal quality is the best.
- Such search operation or learning operation is executed by the memory 28, the microprocessor 27, and the servo circuit 79.
- the servo circuit 79 supplies a phase jump signal to the optical path length fixed position adjusting means or the optical path length difference fine adjusting means, and the optical path length fixed position adjusting means or the optical path length difference fine adjusting means is used for the optical head optical system according to the phase jump signal.
- the optical path length is changed by a predetermined amount.
- the phase jump signal is preset in the phase servo circuit 79 so that the optical path length difference jumps by about the wavelength of the light source. Therefore, the phase servo is driven again immediately after the phase jump is completed, and the optical path length difference is fixed at a position shifted by exactly one wavelength.
- the phase jump is not limited to one wavelength, and a phase jump signal that jumps by an integral multiple of the wavelength, such as two wavelengths, may be used.
- This embodiment is premised on reproduction of a normal optical disc such as a DVD or a Blu-ray disc, but the form is not particularly limited as long as the incident light and the modulated signal light are coherent and have the same wavelength.
- the present invention can be applied to a large capacity memory such as a hologram memory or a near field memory.
- the optical disk apparatus includes the optical disk apparatus having the function of adjusting the fluctuation of the optical path length of the optical pickup optical system and the mechanism necessary for realizing the function, and a stable amplified signal for this purpose.
- An optical pickup capable of obtaining the above is realized.
- FIG. 15 shows a configuration example of an optical disc apparatus in which the optical path length difference fixed position adjustment and the phase servo are performed by the same movable part.
- FIG. 15 shows only the optical system and actuator of the optical head, the optical disc, and the optical disc support mechanism among the components of the optical disc, and the components common to FIG. 1 are not shown.
- the reproduction signal processing block 2 the microprocessor 27, the servo circuit 79, and the like are included in the same configuration example as in FIG.
- the prism mirror 115 shown in FIG. 1 is mounted on the actuator 1501, and a predetermined DC component instructed from the microprocessor 27 to the servo circuit 79 is added to the phase error signal as a drive current of the actuator 1501.
- the position of the optical path length difference is adjusted by adjusting the value of the DC component, and the phase servo is driven using the phase error signal component.
- the magnitude of the DC component is determined to be a predetermined value in accordance with the different layers of the multilayer optical disk, the type of the optical disk, and the like, in the same way as the movement amount of the actuator 1501 given to the movable unit 114 of the first embodiment. That is, adjusting the value of the DC component plays the role of adjusting the optical path length difference fixed position, like the movement amount adjustment of the movable portion 114 in the first embodiment.
- FIG. 16 shows a configuration example of an optical disc apparatus having a function of performing phase servo by the three-dimensional actuator 1601.
- the three-dimensional actuator 1601 is an actuator capable of controlling the tilt in the optical axis direction in addition to a normal two-dimensional actuator. Since the optical path length difference between the signal light and the reference light changes due to the inclination in the optical axis direction, the phase servo is driven by feeding back the phase error signal PES to the inclination in the optical axis direction.
- the configuration and function of the optical system for generating the phase error signal PES are the same as those in FIG.
- FIG. 17 shows a configuration example of an optical disc apparatus having a function of performing rough adjustment, fixed position adjustment, and fine adjustment of the optical path length difference with the same element.
- the actuator on which the objective lens 108 and the corner cube prism 116 are mounted is constituted by a three-dimensional actuator 1601, and in addition to driving in the XYZ directions, the mounted optical element is moved with respect to the optical axis. Movable to tilt.
- the coarse adjustment operation of the optical path length is executed by the movement of the three-dimensional actuator 1601 in the Z direction, and the fixed position adjustment and the fine adjustment operation are performed by the rotation operation about the X direction or the Y direction as the rotation axis. This is executed by changing the inclination of the prism 116 with respect to the optical axis.
- the three-dimensional actuator 1601 is controlled by the servo circuit 79. As a control signal for adjusting the tilt in the optical axis direction, a phase error signal current added with a DC current for adjusting the optical path length difference fixed position as an offset is input.
- This embodiment is a configuration example in the case where the reflectance and transmittance of the non-polarizing beam splitter 118 of the optical disc apparatus of Embodiment 1 are different.
- the non-polarizing beam splitter 118 in the first embodiment is a general one (half beam splitter) having the same reflectance and transmittance. Since the differential signal D1 includes a reproduction signal component, the detectors 121 and 122 need a sufficient band for acquiring the reproduction signal. On the other hand, since the differential signal D2 needs to have the reproduction signal component cut off, the detectors 124 and 125 require a narrower band than the detectors 121 and 122.
- the detectors 124 and 125 can set the amplifier gain of the detector relatively high, and as a result, the required optical signal. Is relatively small. That is, the amplitude of the reproduction signal can be increased by setting the transmittance of the non-polarizing beam splitter 118 to be larger than the reflectance. For example, assuming that a Blu-ray disc is played back at 4 ⁇ speed, the reproduction signal needs a bandwidth of about 100 MHz and the phase error signal of about 200 kHz, so the reflectance of the non-polarizing beam splitter is set to about 1% of the transmittance. It is enough.
- the signal amplification effect can be further increased, and the performance of the optical disc apparatus can be further improved.
- FIG. 18 shows a configuration example of an optical disc apparatus having the functions of this embodiment. Since the phase error signal is obtained by removing the reproduction signal component from the detection signal, even if the light emission power of the light source is constant, the amplitude varies depending on whether it is a recorded portion or an unrecorded portion, or the depth of modulation. For this reason, in this embodiment, a part of the signal light is extracted by being reflected by a special polarizing beam splitter 1801 (equivalent to the special polarizing beam splitter 105) arranged on the optical path for generating the signal light, and collected.
- a special polarizing beam splitter 1801 equivalent to the special polarizing beam splitter 105
- An optical lens 1802 is used to guide the detector 1803 to output an average power signal G.
- the output average power signal G is input to a division circuit 1804 arranged at the subsequent stage of the differential detector 128.
- the output D2 of the differential detector 128 corresponds to a phase error signal.
- the division circuit 1804 executes arithmetic processing for dividing (normalizing) the phase error signal by the average power signal. As a result, a phase error signal having a constant amplitude independent of the state of the optical disk can be obtained, and stable phase servo driving can be performed.
- FIG. 18 the configuration example in which the optical branch and the detector for obtaining the average power signal G are newly provided has been described. However, even if the output is obtained using the output signal of the detector 111 as shown in FIG. Good. In this case, the total output A + B + C + D of the light receiving units 201, 202, 203, 204 shown in FIG. 2 (however, the reproduction signal component is dropped due to band limitation) is the average power signal G. Accordingly, in FIG. 19, in addition to the configuration of FIG. 2, the quadrant detector provided with the logic circuit element for calculating the sum A + B + C + D of the outputs of the light receiving units 201, 202, 203, 204 is It is installed as an acquisition means.
- an optical disc apparatus and an optical head capable of stable phase servo drive can be realized as compared with the configurations shown in Embodiments 1 to 5.
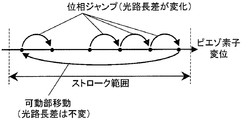
- This embodiment is a case where the optical path length difference fixed position fine adjustment in the first embodiment is performed by a combination of the piezo element 129 and the movable portion 114. Specifically, as shown in FIG. 23, the movable portion is moved when reaching the end of the stroke range of the piezo element by repeating the phase jump. Then, since closed-loop control is performed, the piezo element expands and contracts (in conjunction with the movable part) without changing the optical path length difference, so that it is possible to perform further phase jumps. It is possible to repeat the phase jump within the stroke range. That is, even when the stroke of the piezo element 129 is short, a sufficient optical path length difference adjustment range can be ensured.
- the piezoelectric element preferably has a shorter length in the expansion / contraction direction.
- the length in the expansion / contraction direction is proportional to the stroke of the piezoelectric element, the response speed and the stroke are in a trade-off relationship. Therefore, with this configuration, it is possible to secure a response speed of the piezo element by allowing a short stroke, and to contribute to an increase in the reproduction speed of the optical disc apparatus. Moreover, since it has the effect of reducing the size of the piezo element, it can contribute to the downsizing of the optical disk device, particularly the optical head unit.
- the present invention makes it possible to detect a reproduction signal of a large-capacity multilayer high-speed optical disk stably and with high quality, and a wide range of industrial applications such as a large-capacity video recorder, a hard disk data backup device, and a storage information archive device can be expected.
Landscapes
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Optical Recording Or Reproduction (AREA)
- Optical Head (AREA)
Abstract
An optical head which causes light used as reference light, not emitted onto an optical disc, to interfere with reflected light from the optical disc and obtains an amplified signal by calculation from a plurality of interference signal outputs, wherein coarse adjustment of differences in optical path length, adjustment of fixed position, and fine adjustment are carried out by separate means. Due to this, the optical head can easily and stably acquire an amplified signal and can improve the S/N ratio of a reproduction signal in cases when the signal light intensity has to be made weaker than in the past as is with multilayer optical discs which have a plurality of recording layers, and in cases when noise is increasing due to the signal reproduction rate becoming faster than in the past.
Description
本出願は、2009年3月13日に出願された日本特許出願第2009-060420号の優先権を主張し、その内容を参照することにより本出願に取り込む。
This application claims the priority of Japanese Patent Application No. 2009-060420 filed on March 13, 2009, and is incorporated herein by reference.
本発明は、光ディスク装置の再生信号の高S/N化に関する。
The present invention relates to a high S / N ratio of a reproduction signal of an optical disc apparatus.
光ディスクは、青色半導体レーザと、高NA対物レンズを用いるブルーレイディスクの製品化に至って、光学系の分解能としてはほぼ限界に達し、さらなる大容量化に向けては、今後、記録層の多層化が有力となると考えられる。このような多層光ディスクにおいては各記録層からの検出光量がほぼ同等となる必要性から、特定の記録層からの反射率は小さくせざるを得ない。ところが光ディスクは大容量化とともにビデオなどのダビング速度の高速化の必要性から、データ転送速度の高速化も続いており、そのままでは再生信号のS/N比が十分確保できなくなりつつある。したがって今後の記録層の多層化と高速化を同時に進めていくためには、検出信号の高S/N化が必須となる。
Optical discs have reached the limit of the resolution of the optical system, resulting in the commercialization of a blue-ray disc using a blue semiconductor laser and a high NA objective lens. To further increase the capacity, the recording layer will be multilayered in the future. It is thought to be influential. In such a multi-layer optical disc, the reflectance from a specific recording layer must be reduced because the amount of light detected from each recording layer needs to be substantially equal. However, since the optical disk needs to have a large capacity and a high dubbing speed for video and the like, the data transfer speed is also increasing, and the S / N ratio of the reproduced signal cannot be secured sufficiently. Therefore, in order to simultaneously advance the multilayering and speeding up of the recording layer in the future, it is essential to increase the S / N of the detection signal.
光ディスクの再生信号の高S/N化に関する技術は、たとえば特許文献1、特許文献2、特許文献3などに述べられている。特許文献1、特許文献2は光磁気ディスクの再生信号の高S/N化に関して、半導体レーザからの光を光ディスクに照射する前に分岐して、光ディスクに照射しない光を、光ディスクからの反射光と合波して干渉させることにより、微弱な信号の振幅を、光ディスクに照射しない光の光量を大きくすることによって増幅することを狙ったものである。光磁気ディスクの信号検出で従来用いられている偏光ビームスプリッタの透過光と反射光の差動検出では、本質的にはもとの入射偏光成分と光磁気ディスクによる偏光回転によって生じる入射偏光方向と直交する偏光成分を干渉させて、入射偏光で直交偏光成分を増幅して検出を行なうことになっている。したがって、もとの入射偏光成分を増大させれば信号を増大させることができるが、光ディスクに入射させる光強度は、データを消去したり上書きしたりしないようにするために、ある程度以下に抑える必要がある。
Techniques relating to increasing the S / N ratio of an optical disk reproduction signal are described in, for example, Patent Document 1, Patent Document 2, and Patent Document 3. Patent Document 1 and Patent Document 2 relate to increasing the S / N ratio of a reproduction signal of a magneto-optical disk, and branch light before irradiating the optical disk with light from a semiconductor laser, and reflect light that does not irradiate the optical disk from reflected light from the optical disk. Is intended to amplify the amplitude of a weak signal by increasing the amount of light that does not irradiate the optical disk. In the differential detection of the transmitted light and reflected light of the polarization beam splitter conventionally used in the signal detection of the magneto-optical disk, essentially the original incident polarization component and the incident polarization direction caused by the polarization rotation by the magneto-optical disk Detection is performed by interfering orthogonal polarization components and amplifying the orthogonal polarization components with incident polarization. Therefore, if the original incident polarization component is increased, the signal can be increased, but the intensity of the light incident on the optical disk must be kept below a certain level in order not to erase or overwrite the data. There is.
これに対して上記従来の技術では、予め信号光と干渉させる光を分離しておいて、これをディスクに集光せずに信号光と干渉させ、信号増幅のため干渉させる光の強度を、ディスク表面の光強度と関係なく強くできるようにしているのである。これにより原理的には光強度の許す範囲で、強度を強くすればするほど、光検出器からの光電流を電圧変換するアンプのノイズに比べたS/N比を高めることができる。特許文献3ではフォトクロミック媒体を用いた光ディスクの再生信号の高S/N化に関し、参考文献1、参考文献2と同様に、光ディスクに照射しない光を、光ディスクからの反射光と干渉させることによって信号増幅を狙っている。フォトクロミック媒体を用いた光ディスクについても、信号再生のため入射光強度が高い程媒体の劣化を早めるため、上記光磁気ディスクと同様に記録媒体に照射する光の強度に制限を伴う。
On the other hand, in the above conventional technique, the light to be interfered with the signal light is separated in advance, and this is interfered with the signal light without condensing it on the disk, and the intensity of the light to be interfered for signal amplification is This makes it possible to increase the intensity regardless of the light intensity on the disk surface. Thus, in principle, the S / N ratio compared to the noise of the amplifier that converts the photocurrent from the photodetector into a voltage can be increased as the intensity is increased within the range allowed by the light intensity. Patent Document 3 relates to a high S / N ratio of a reproduction signal of an optical disk using a photochromic medium, and in the same manner as in Reference Documents 1 and 2, a signal is generated by interfering light that does not irradiate an optical disk with reflected light from the optical disk. Aiming for amplification. Also for an optical disk using a photochromic medium, the higher the incident light intensity for signal reproduction, the faster the medium is deteriorated. Therefore, similarly to the magneto-optical disk, the intensity of light applied to the recording medium is limited.
特許文献1では、2つの光を干渉させて干渉光強度を検出している。この際、干渉させるディスク反射光の光路長を可変とし、干渉信号振幅の確保を狙っている。特許文献2、特許文献3、特許文献4では干渉光強度検出に加えて、差動検出も行っている。これにより信号に寄与しない各光の強度成分をキャンセルし、信号振幅を2倍にすることで高S/N化を図っている。
In Patent Document 1, interference light intensity is detected by causing two lights to interfere with each other. At this time, the optical path length of the reflected disk light to be interfered is made variable so as to secure the interference signal amplitude. In Patent Document 2, Patent Document 3, and Patent Document 4, differential detection is performed in addition to interference light intensity detection. As a result, the intensity component of each light that does not contribute to the signal is canceled and the signal amplitude is doubled to achieve a high S / N ratio.
一般に、2つの光の干渉により得られる干渉信号は、干渉させる二つの光の間の位相差(光路長差)に依存する。これに対し、特許文献1では光路中に挿入された三角プリズムを入射光軸方向に可動とすることで光路長差の安定化を図っている。同様に、特許文献4では干渉光学系全体を光ディスクに追従させることで、光ディスクの回転に伴う面ぶれにより発生する光路長差をキャンセルすることを図っている。また、光ディスクに当てない光を反射するミラーの位置を光軸方向に可動とすることで光路長差の安定化を図っている。光路長差を特許文献5では互いに干渉状態の異なる複数の干渉信号を生成し、それらの演算により信号を生成することで、上記位相差に依存しない増幅信号を出力することを図っている。
Generally, an interference signal obtained by interference between two lights depends on a phase difference (optical path length difference) between the two lights to be interfered. On the other hand, Patent Document 1 stabilizes the optical path length difference by making a triangular prism inserted in the optical path movable in the direction of the incident optical axis. Similarly, in Patent Document 4, the entire optical interference system is caused to follow the optical disc, thereby canceling the optical path length difference caused by the surface blur caused by the rotation of the optical disc. Further, the optical path length difference is stabilized by making the position of the mirror that reflects the light not hitting the optical disc movable in the optical axis direction. In Patent Document 5, a plurality of interference signals having different interference states are generated from the optical path length difference, and an amplified signal that does not depend on the phase difference is output by generating a signal by calculating these interference signals.
上記従来技術において、干渉信号を安定に保つには、現在の光ディスクの面ぶれ約600μmに対し、可動とする対象物を追従させ、更に信号光と参照光の位相差を固定する、すなわち光源の波長よりも十分小さい数nm程度の精度で位置決めを行う必要がある。しかし現在のアクチュエータでこの要求に見合うストロークと位置決め精度を達成することは非常に難しい。更に、光ディスクに設けられたカバー層の厚みのむらも光路長差を乱す原因となるが、上記従来技術においてこの厚みのむらに対応する光路長の制御方法については特に述べられていない。
In the above prior art, in order to keep the interference signal stable, the object to be moved is made to follow about 600 μm of the current optical disc surface deviation, and the phase difference between the signal light and the reference light is fixed, that is, the light source It is necessary to perform positioning with an accuracy of about several nanometers sufficiently smaller than the wavelength. However, it is very difficult to achieve a stroke and positioning accuracy that meet this requirement with current actuators. Furthermore, unevenness in the thickness of the cover layer provided on the optical disk also causes the optical path length difference to be disturbed. However, in the above prior art, a method for controlling the optical path length corresponding to the uneven thickness is not particularly described.
これに対し、特許文献5では光路長差に依存しない出力を得る方法を採っているため上記の問題は発生しないが、光路長差に依存しない出力を得るための信号処理過程において非線形演算などの複雑な演算処理が要求されるため、信号処理回路への負担が大きくなる。また、複数の干渉信号から光路長差に依存しない出力をするため、各干渉信号に混入する熱雑音が加算されてノイズが増加したり、演算処理の不完全性によりノイズが混入したりすることにより、上記演算処理が信号品質を劣化させる要因になる。更に、光路長差に依存しない出力を得るためには、光学系の各種パラメータに高い精度が要求され、光学系の構築が非常に困難になる。
On the other hand, Patent Document 5 employs a method of obtaining an output that does not depend on the optical path length difference, so the above problem does not occur. However, in a signal processing process for obtaining an output that does not depend on the optical path length difference, non-linear computation or the like is performed. Since complicated arithmetic processing is required, the burden on the signal processing circuit increases. Also, since the output does not depend on the optical path length difference from multiple interference signals, thermal noise mixed into each interference signal is added and noise increases, or noise is mixed due to imperfect computation processing Therefore, the above arithmetic processing becomes a factor that degrades the signal quality. Furthermore, in order to obtain an output that does not depend on the optical path length difference, high accuracy is required for various parameters of the optical system, and the construction of the optical system becomes very difficult.
上記課題に鑑み、本発明の第1の目的は、2つの光の光路差の調整が容易で、信号増幅効果が高く、光学系の小型化に適した、干渉型の光情報信号の再生方法を提供することにある。
In view of the above problems, a first object of the present invention is to provide an interference-type optical information signal reproduction method that can easily adjust the optical path difference between two lights, has a high signal amplification effect, and is suitable for downsizing an optical system. Is to provide.
本発明の第2の目的は、2つの光の光路差の調整が容易で、信号増幅効果が高く、光学系の小型化に適した、干渉型の光情報信号の検出系を備えた光ヘッドを提供することである。
A second object of the present invention is to provide an optical head equipped with an interference type optical information signal detection system that can easily adjust an optical path difference between two lights, has a high signal amplification effect, and is suitable for downsizing of an optical system. Is to provide.
本発明の第3の目的は、2つの光の光路差の調整が容易で、信号増幅効果が高く、光学系の小型化に適した、干渉型の光情報信号の検出系を備えた光ディスク装置を提供することである。
A third object of the present invention is to provide an optical disc apparatus equipped with an interference type optical information signal detection system that can easily adjust an optical path difference between two lights, has a high signal amplification effect, and is suitable for downsizing of an optical system. Is to provide.
本発明では、信号光と参照光の干渉光を複数の検出器で検出することにより再生信号を取得する方式の光ディスク装置、光ヘッドあるいは光学的情報再生方法において、光ヘッド内に形成される光路長の調整を、光路長差の粗調整、微調整および光路長差固定位置調整の3つに分けて実行することにより前述の課題を解決する。光路長差の粗調整とは、光ヘッドと光情報記録媒体との相対間隔の変動(例えば光ディスクの面ぶれなど)に基づき発生する信号光と参照光との光路差をキャンセルするための調整のことを指す。光路差の微調整および光路長差固定位置調整の定義については後述する。
According to the present invention, an optical path formed in an optical head in an optical disk apparatus, an optical head, or an optical information reproducing method of a type in which a reproduction signal is obtained by detecting interference light of signal light and reference light with a plurality of detectors. The above-described problem is solved by performing the length adjustment in three parts: coarse adjustment of the optical path length difference, fine adjustment, and optical path length difference fixed position adjustment. The rough adjustment of the optical path length difference is an adjustment for canceling the optical path difference between the signal light and the reference light, which is generated based on fluctuations in the relative distance between the optical head and the optical information recording medium (for example, optical disc surface shake). Refers to that. The definition of the fine adjustment of the optical path difference and the adjustment of the optical path length difference fixed position will be described later.
なお、以上述べた光路長の微調整、光路長差固定位置調整および光路差粗調整は、概念としては区別されるが、各調整が同一の機構で実施される形態もある。
The fine adjustment of the optical path length, the optical path length difference fixed position adjustment, and the coarse optical path difference adjustment described above are distinguished in concept, but there is a form in which each adjustment is implemented by the same mechanism.
従来のディスク装置と同等のサイズで作製可能で、信号増幅効果が高く、安価な干渉型の光ディスク装置、光ヘッドおよび信号再生方法が実現される。
An interference type optical disc device, an optical head, and a signal reproducing method that can be manufactured in the same size as a conventional disc device, have a high signal amplification effect, and are inexpensive are realized.
本発明の他の目的、特徴及び利点は添付図面に関する以下の本発明の実施例の記載から明らかになるであろう。
Other objects, features and advantages of the present invention will become apparent from the following description of embodiments of the present invention with reference to the accompanying drawings.
以下、図1を用いて本発明の実施形態を説明する。
Hereinafter, an embodiment of the present invention will be described with reference to FIG.
図1は本実施例の光ディスク装置の全体構成例を示す。図1に示す光ディスク装置は、大まかには、光ディスク109を保持するスピンドルモータ77を含むディスク支持手段、光ディスク109へ各種のデータを入出力する光ヘッド(光ピックアップ)2001、光ディスク装置全体の動作を制御するファームウェアが動作するマイクロプロセッサ27、光ヘッドの再生信号に各種の処理を行う再生信号処理ブロック2、各種制御用パラメータや制御用のテーブルなどが格納されるメモリ29、光ヘッド2001に搭載されたレーザを駆動するレーザドライバ28、光ヘッドから光ディスクに照射される光スポット37の位置制御を行うサーボ回路79、光ヘッド2001の位置を制御することなどにより光ディスク109の所定の位置に光スポット37を移動させる自動位置制御手段76などにより構成される。
次に、光ヘッド2001の内部構成およびその機能について説明する。以下に説明する光ヘッド系を構成する各光学素子は、光学モジュールとして一体形成されている。本実施例の光ヘッド光学系は、レーザ光から放出された光を光ディスクに導き反射させ、当該反射光と参照信号とを干渉させて干渉光を生成するための干渉光学系と、生成された干渉光を分離し、分離された各々の干渉光に位相差を付与して複数の検出器で検出するための検出光学系とにより構成される。 FIG. 1 shows an example of the overall configuration of the optical disk apparatus of the present embodiment. The optical disk apparatus shown in FIG. 1 roughly includes disk support means including a spindle motor 77 that holds theoptical disk 109, an optical head (optical pickup) 2001 that inputs / outputs various data to / from the optical disk 109, and operations of the entire optical disk apparatus. The microprocessor 27 on which the firmware to be controlled operates, the reproduction signal processing block 2 that performs various processes on the reproduction signal of the optical head, the memory 29 that stores various control parameters and control tables, and the optical head 2001 are mounted. A laser driver 28 that drives the laser, a servo circuit 79 that controls the position of the light spot 37 irradiated on the optical disk from the optical head, and the optical spot 37 at a predetermined position on the optical disk 109 by controlling the position of the optical head 2001. Automatic position control means 76 for moving More composed.
Next, the internal configuration and function of theoptical head 2001 will be described. Each optical element constituting the optical head system described below is integrally formed as an optical module. The optical head optical system of the present embodiment is generated by an interference optical system for guiding the light emitted from the laser light to the optical disc and reflecting it, and causing the reflected light and the reference signal to interfere to generate interference light. The detection optical system is configured to separate the interference light, add a phase difference to each of the separated interference lights, and detect with a plurality of detectors.
次に、光ヘッド2001の内部構成およびその機能について説明する。以下に説明する光ヘッド系を構成する各光学素子は、光学モジュールとして一体形成されている。本実施例の光ヘッド光学系は、レーザ光から放出された光を光ディスクに導き反射させ、当該反射光と参照信号とを干渉させて干渉光を生成するための干渉光学系と、生成された干渉光を分離し、分離された各々の干渉光に位相差を付与して複数の検出器で検出するための検出光学系とにより構成される。 FIG. 1 shows an example of the overall configuration of the optical disk apparatus of the present embodiment. The optical disk apparatus shown in FIG. 1 roughly includes disk support means including a spindle motor 77 that holds the
Next, the internal configuration and function of the
まず、干渉光学系の詳細について説明する。半導体レーザ101からの光をコリメートレンズ102によって平行光として、λ/2板103を透過させて偏光ビームスプリッタ104に入射させる。偏光ビームスプリッタ104は分離面に入射するp偏光(以後、水平偏光と呼ぶ)をほぼ100%透過し、s偏光(以後、垂直偏光と呼ぶ)をほぼ100%反射させる機能、すなわち透過光と反射光とを分離する機能を有している。このとき、λ/2板103の光軸のまわりの回転角度を調整することにより、透過光と反射光の強度比を調整することができる。透過する光は特殊偏光ビームスプリッタ105に入射する。特殊偏光ビームスプリッタ105は水平偏光を100%透過し、垂直偏光の一部を反射、一部を透過するという性質を持っている。このため入射した光は100%透過し、λ/4板106を透過して円偏光に変換され、球面収差を補正するビームエキスパンダ1101を通過し、2次元アクチュエータ107に搭載された対物レンズ108により、光ディスク109上の記録層に集光される。光ディスクからの反射光(以後、信号光と呼ぶ)は同じ光路を戻り、対物レンズ108によって平行光とされ、λ/4板106を再び通過することにより最初に入射したときとは90°偏光方向が回転した直線偏光となる。次に特殊偏光ビームスプリッタ105に入射し、上記の性質により一部が透過、一部が反射する。反射光はシリンドリカルレンズ110によって検出器111に入射する。ここで検出器111は図2のように検出器201,202,203,204の4つに分割されており、図のようにそれぞれの出力信号をA,B,C,Dとおくと、演算A-B-C+Dが焦点ずれ信号(FES)、演算A-B+C-Dがトラックずれ信号(TES)、としてそれぞれ出力され、2次元アクチュエータ107のボイスコイルモータに電流としてフィードバックされる。このため、図2に示す検出器111は、演算A-B-C+Dおよび演算A-B+C-Dを実行するための論理演算回路を備えている。
First, the details of the interference optical system will be described. Light from the semiconductor laser 101 is converted into parallel light by the collimator lens 102 and transmitted through the λ / 2 plate 103 to enter the polarization beam splitter 104. The polarization beam splitter 104 transmits almost 100% of p-polarized light (hereinafter referred to as horizontal polarization) incident on the separation surface and reflects almost 100% of s-polarized light (hereinafter referred to as vertical polarization), that is, transmitted light and reflected light. It has a function of separating light. At this time, the intensity ratio of the transmitted light and the reflected light can be adjusted by adjusting the rotation angle of the λ / 2 plate 103 around the optical axis. The transmitted light is incident on the special polarization beam splitter 105. The special polarizing beam splitter 105 has a property of transmitting 100% of horizontally polarized light, reflecting part of vertically polarized light, and partially transmitting. Therefore, the incident light is 100% transmitted, is transmitted through the λ / 4 plate 106 and converted into circularly polarized light, passes through the beam expander 1101 that corrects spherical aberration, and is mounted on the two-dimensional actuator 107. Thus, the light is condensed on the recording layer on the optical disk 109. Reflected light from the optical disk (hereinafter referred to as signal light) returns to the same optical path, is converted into parallel light by the objective lens 108, and is 90 ° polarization direction from the time of first incident by passing through the λ / 4 plate 106 again. Becomes the linearly polarized light rotated. Next, the light is incident on the special polarization beam splitter 105, and a part of the light is transmitted and a part of the light is reflected by the above properties. The reflected light is incident on the detector 111 by the cylindrical lens 110. Here, the detector 111 is divided into four detectors 201, 202, 203, and 204 as shown in FIG. 2. If the respective output signals are set as A, B, C, and D as shown in the figure, the calculation is performed. A−B−C + D is output as a defocus signal (FES), and a calculation A−B + C−D is output as a track error signal (TES), and is fed back to the voice coil motor of the two-dimensional actuator 107 as a current. For this reason, the detector 111 shown in FIG. 2 includes a logical operation circuit for executing the operation AB−C + D and the operation AB + CD.
一方、特殊偏光ビームスプリッタ105を透過した光は偏光ビームスプリッタ104に入射する。すると偏光が90度回転しているため、反射して集光レンズ113に入射する(以後、本反射光を参照光と呼ぶ)。一方、半導体レーザ101から出射し、偏光ビームスプリッタ104で反射された光は可動部114に搭載された反射プリズム115において反射し、2次元アクチュエータ107上に搭載されたコーナーキューブプリズム116に入射する。コーナーキューブプリズム116は入射した光を正反対の向きに反射させる素子である。ここで、入射光は光軸がコーナーキューブプリズム116の3つの反射面のなす頂点に入射されるようにする。これにより反射された光は同じ光路を戻り、偏光ビームスプリッタ104に入射する。ここでコーナーキューブプリズム116によって光の偏光、波面が擾乱を受けるため、光路の途中に挿入された偏光補償素子117によってそれらの擾乱が補償され、かつ往路の光に対して復路の光の偏光が90度回転するようにしている。そのためコーナーキューブプリズム116からの反射光は偏光ビームスプリッタ104を透過し、光ディスクからの反射光と互いに偏光が直交した状態で同軸となって集光レンズ113に入射する。すなわち、参照光と信号光との干渉光が偏光ビームスプリッタ104にて形成される。なお、この時点においては信号光と参照光が直交しており、信号光と参照光の位相関係によって正味の偏光状態が異なるという意味において干渉光と呼んでいるが、厳密な意味での(光の強度変化として現れる)干渉は、以下に説明する干渉光学系において偏光ビームスプリッタ120,124によって分離された後にはじめて発生する。
On the other hand, the light transmitted through the special polarization beam splitter 105 enters the polarization beam splitter 104. Then, since the polarized light is rotated 90 degrees, it is reflected and enters the condenser lens 113 (hereinafter, this reflected light is referred to as reference light). On the other hand, the light emitted from the semiconductor laser 101 and reflected by the polarization beam splitter 104 is reflected by the reflecting prism 115 mounted on the movable portion 114 and enters the corner cube prism 116 mounted on the two-dimensional actuator 107. The corner cube prism 116 is an element that reflects incident light in the opposite direction. Here, the incident light is incident on the vertex formed by the three reflecting surfaces of the corner cube prism 116. The light reflected thereby returns along the same optical path and enters the polarization beam splitter 104. Here, since the polarization and wavefront of the light are disturbed by the corner cube prism 116, the disturbance is compensated by the polarization compensator 117 inserted in the middle of the optical path, and the return light is polarized with respect to the forward light. It is rotated 90 degrees. For this reason, the reflected light from the corner cube prism 116 passes through the polarization beam splitter 104 and enters the condensing lens 113 coaxially with the reflected light from the optical disc being orthogonal to each other. That is, interference light between the reference light and the signal light is formed by the polarization beam splitter 104. At this point, the signal light and the reference light are orthogonal, and the interference light is called in the sense that the net polarization state differs depending on the phase relationship between the signal light and the reference light. Interference (appearing as a change in intensity) occurs only after being separated by the polarization beam splitters 120 and 124 in the interference optical system described below.
次に、検出光学系の詳細について説明する。集光レンズに入射した二つの光は、無偏光ビームスプリッタ118によってそれぞれ1対1の割合で反射、透過する。透過した光はλ/2板119を透過することにより偏光が45度回転した後、偏光ビームスプリッタ120によって水平偏光成分と垂直偏光成分に分離され、分離されたそれぞれの光は検出器121,122によって検出される。無偏光ビームスプリッタ118を反射した光は光軸方向が水平方向に対して45度に設定されたλ/4板123を通過した後、偏光ビームスプリッタ124によって水平偏光成分と垂直偏光成分に分離され、分離されたそれぞれの光は検出器125,126によって検出される。検出器121,122の出力信号は差動回路127に入力され、差動信号D1が出力される。これが再生信号(RF)となる。同様に、検出器125,126の出力信号は差動回路128に入力され、差動信号D2が出力される。検出器125,126は再生信号よりも十分帯域が狭く、この差動信号は再生信号成分が除かれた状態で出力される。
Next, details of the detection optical system will be described. The two lights incident on the condenser lens are reflected and transmitted by the non-polarizing beam splitter 118 at a ratio of 1: 1, respectively. The transmitted light is transmitted through the λ / 2 plate 119 and the polarization is rotated by 45 degrees, and then separated by the polarization beam splitter 120 into a horizontal polarization component and a vertical polarization component, and the separated lights are detected by the detectors 121 and 122. Detected by. The light reflected by the non-polarizing beam splitter 118 passes through a λ / 4 plate 123 whose optical axis direction is set to 45 degrees with respect to the horizontal direction, and then is separated into a horizontal polarization component and a vertical polarization component by the polarization beam splitter 124. The separated lights are detected by detectors 125 and 126. The output signals of the detectors 121 and 122 are input to the differential circuit 127, and the differential signal D1 is output. This becomes a reproduction signal (RF). Similarly, the output signals of the detectors 125 and 126 are input to the differential circuit 128, and the differential signal D2 is output. The detectors 125 and 126 have a sufficiently narrower band than the reproduction signal, and the differential signal is output in a state where the reproduction signal component is removed.
検出光学系に設けられた検出器の一方の検出信号は、位相誤差信号(PES)として、サーボ回路79を介してピエゾ素子129の駆動電圧にフィードバックされる。ピエゾ素子129は、駆動電圧に応じて伸縮し、干渉光学系の信号光用の光路上に取り付けられたミラー130を前後に動かし、信号光の光路長を調整することにより信号光と参照光の位相差(以後、干渉位相と呼ぶ)の調整を行う機能を有する(干渉位相の調整を以後、光路長差微調整と呼ぶ)。すなわち本実施例において、ピエゾ素子129とミラー130とは光路長差微調整手段を構成する。
One detection signal of the detector provided in the detection optical system is fed back to the drive voltage of the piezo element 129 via the servo circuit 79 as a phase error signal (PES). The piezo element 129 expands and contracts according to the driving voltage, moves the mirror 130 attached on the optical path for signal light of the interference optical system back and forth, and adjusts the optical path length of the signal light to adjust the signal light and the reference light. It has a function of adjusting the phase difference (hereinafter referred to as interference phase) (interference phase adjustment is hereinafter referred to as optical path length difference fine adjustment). That is, in the present embodiment, the piezo element 129 and the mirror 130 constitute an optical path length difference fine adjustment unit.
本光学系において、干渉信号出力を十分に得るためには、信号光と参照光の光路長差は光源のコヒーレンス長以内程度に設定する必要がある。このため可動部114は、多層光ディスクの読み取る層やディスクの種類などに応じて反射プリズム115を入射光の光軸方向に移動させ、後に述べる光路長差粗調整、微調整を行った後に光路長差が光源のコヒーレンス長より十分小さく、かつ波長の整数倍となるように調整する(以下、本調整を光路長差固定位置調整と呼ぶ。)。すなわち本実施例において、反射プリズム115と可動部114とは光路長差固定位置調整手段を構成する。可動部114の移動量はマイクロプロセッサ27により決定され、多層光ディスクの読み取る層やディスクの種類などに応じて予め決められた所定の移動量が可動部に指示される。あるいは、マイクロプロセッサ114が、再生信号振幅の大きさが最大となるような移動量を学習する機能を有し、これにより設定された移動量を用いても構わない。
In this optical system, in order to obtain a sufficient interference signal output, the optical path length difference between the signal light and the reference light needs to be set within about the coherence length of the light source. For this reason, the movable unit 114 moves the reflecting prism 115 in the optical axis direction of the incident light according to the layer to be read of the multilayer optical disk, the type of the disk, etc. Adjustment is performed so that the difference is sufficiently smaller than the coherence length of the light source and becomes an integral multiple of the wavelength (hereinafter, this adjustment is referred to as optical path length difference fixed position adjustment). That is, in this embodiment, the reflecting prism 115 and the movable portion 114 constitute an optical path length difference fixed position adjusting unit. The amount of movement of the movable unit 114 is determined by the microprocessor 27, and a predetermined amount of movement determined in advance according to the layer to be read from the multilayer optical disk, the type of the disk, etc. is instructed to the movable unit. Alternatively, the microprocessor 114 may have a function of learning a movement amount that maximizes the reproduction signal amplitude, and the movement amount set thereby may be used.
なお、光ディスクと光ヘッドとの間の光路長は、面ぶれなど、光ディスクとの相対距離の変化によっても変化するが、光ディスクとの相対距離の変化に基づき発生する光路長差の変化は光ヘッド光学系の揺らぎに起因して発生する光路長差の変化よりも遙かに大きい。このような光路長差の大きな変化は、コーナーキューブプリズム116が対物レンズ108とともにアクチュエータ107に一体に搭載されていることにより相殺される。より具体的には、焦点ずれ信号により2次元アクチュエータ107が、対物レンズ108と光ディスクとの間の距離が一定になるように閉ループ制御され(以後、フォーカスサーボと呼ぶ)、コーナーキューブプリズム116が一体となって動くために、信号光の光路長変化と、参照光の光路長変化が等しくなって、光路長差が相殺される、ということである。すなわち、本機構により、フォーカスサーボを駆動することで、同時に光路長差の粗調整を行っていることになる(以後、光ディスクの面ぶれによる光路長差変化を補償する調整を光路長差粗調整と呼ぶ)。
Note that the optical path length between the optical disk and the optical head also changes due to a change in the relative distance from the optical disk, such as surface deflection, but the change in the optical path length difference that occurs due to the change in the relative distance from the optical disk This is much larger than the change in optical path length difference caused by fluctuations in the optical system. Such a large change in the optical path length difference is offset by the corner cube prism 116 being integrally mounted on the actuator 107 together with the objective lens 108. More specifically, the two-dimensional actuator 107 is closed-loop controlled by the defocus signal so that the distance between the objective lens 108 and the optical disk is constant (hereinafter referred to as focus servo), and the corner cube prism 116 is integrated. Therefore, the change in the optical path length of the signal light is equal to the change in the optical path length of the reference light, so that the optical path length difference is offset. That is, by this mechanism, the focus servo is driven to perform coarse adjustment of the optical path length difference at the same time (hereinafter, adjustment for compensating for the change in optical path length difference due to optical disc surface deflection is performed. Called).
ここで、光路長差の固定位置調整、粗調整、微調整は基本的にこの順に行う。より具体的には、まず最初にディスクの種類や、多層光ディスクの読み取る層に応じて、固定位置調整を行う。次にフォーカスサーボを駆動し(この動作が光路長差粗調整になっている)、最後に光路長差微調整を行えばよい。
Here, the fixed position adjustment, coarse adjustment, and fine adjustment of the optical path length difference are basically performed in this order. More specifically, first, the fixed position is adjusted according to the type of the disc and the layer to be read of the multilayer optical disc. Next, the focus servo is driven (this operation is the optical path length difference coarse adjustment), and finally the optical path length difference fine adjustment is performed.
ここで、光路長差の調整を本発明のごとく3段階に分けず、単一の調整によって行う場合を考える。この場合、光路長差調整手段は、光ディスクの面ぶれに追従するためのストローク(典型的には1mm程度)と、干渉位相を一定に保つための位置決め精度(数nm程度)が同時に必要とされるが、一般的にこの二つの条件を満たすことは難しい。これに対して本発明においては、ストロークは粗調整、位置決め精度は微調整に委ねることにより、調整機構への負担が大幅に改善する。更に、光路長差の微調整は厳密な光路長差ゼロに固定するものではなく、光路長差を波長の整数倍の位置に固定するものである。従ってゼロ点調整を行わないと、干渉位相はゼロに固定されているが、光路長差がコヒーレンス長程度かそれ以上離れてしまい、十分な信号振幅が得られない状況が生じる。このために光ディスクの種類などにより光路長差のゼロ点調整を行うことで、微調整時に常に光路長ゼロ付近(コヒーレンス長よりも十分小さい範囲)に光路長を固定することができるため、常に十分な干渉信号振幅を得ることができる。すなわち、これら3種類の光路長差調整を別々に行うことにより、簡易な素子で光路長差調整を実現することができ、かつ様々な種類の光ディスクに対応することが可能となる。
Here, let us consider a case where the adjustment of the optical path length difference is performed by a single adjustment without dividing into three stages as in the present invention. In this case, the optical path length difference adjusting means requires a stroke (typically about 1 mm) for following the surface blur of the optical disc and a positioning accuracy (about several nm) for keeping the interference phase constant. However, it is generally difficult to satisfy these two conditions. On the other hand, in the present invention, the burden on the adjusting mechanism is greatly improved by entrusting coarse adjustment of the stroke and fine adjustment of the positioning accuracy. Further, the fine adjustment of the optical path length difference is not to fix the optical path length difference strictly to zero, but to fix the optical path length difference at a position that is an integral multiple of the wavelength. Therefore, if the zero point adjustment is not performed, the interference phase is fixed to zero, but the optical path length difference is about the coherence length or more, and a situation in which sufficient signal amplitude cannot be obtained occurs. For this reason, by adjusting the zero point of the optical path length difference depending on the type of optical disk, etc., the optical path length can always be fixed near zero (range sufficiently smaller than the coherence length) at the time of fine adjustment. An interference signal amplitude can be obtained. That is, by separately performing these three types of optical path length difference adjustments, it is possible to realize optical path length difference adjustments with simple elements and to deal with various types of optical discs.
コーナーキューブプリズム116の偏光補償について詳細に説明する。コーナーキューブプリズム116は図3Aに示すように、ガラスなどの媒質を切り出して立方体の3面を構成したものである。コーナーキューブプリズム116への入射光は、この3面によって反射され、入射光と正反対の方向に戻り光として出射される。ここで、各反射面での反射は全反射条件を満たすため、所定の入射角に応じた位相差が、入射面に対するp偏光とs偏光の間に発生する。このため戻り光は偏光と波面が乱れる。しかも光の入射する位置によって3つの反射面を反射する順番が異なることにより、偏光の乱れ方が異なる。図3Bはコーナーキューブプリズム116を入射光の方向から見たときの図であり、ここに示す(1)(2)(3)(4)(5)(6)の領域においてそれぞれ異なる偏光擾乱が発生する。但し図の太線は反射面どうしの境界線を表している。これを補正するには、図4のように3分割位相板501と、λ/4板502と、6分割λ/2板503からなる偏光補償素子117を挿入すればよい。λ/4板、6分割λ/2板は偏光の補償だけでなく、入射光に対して戻り光の偏光を90度回転させる機能も兼ねている。また、3分割位相板は特定領域の水平偏光と垂直偏光の間に所定の位相差φp-φs(φp,φsはそれぞれ水平偏光、垂直偏光に発生する位相)を発生させるもので、入射時に本素子を通過する領域と通過しない領域の間の位相差を補償し、戻り光の波面をそろえる役割を持つ。例として、光の波長が405nm、コーナーキューブプリズム116の媒質がBK7であるときの3分割位相板、λ/4板と、6分割λ/2板の設定値を表1に示す。角度の定義は図4に示すように、垂直偏光方向504を0度とし、入射光方向から見て反時計回りを正としている。

The polarization compensation of the corner cube prism 116 will be described in detail. As shown in FIG. 3A, the corner cube prism 116 is formed by cutting out a medium such as glass to form three surfaces of a cube. Incident light to the corner cube prism 116 is reflected by these three surfaces and is emitted as return light in a direction opposite to the incident light. Here, since the reflection at each reflecting surface satisfies the total reflection condition, a phase difference corresponding to a predetermined incident angle occurs between the p-polarized light and the s-polarized light with respect to the incident surface. For this reason, the return light is disturbed in polarization and wavefront. In addition, the order of reflecting the three reflecting surfaces differs depending on the position where the light is incident, so that the polarization disturbance is different. FIG. 3B is a view when the corner cube prism 116 is viewed from the direction of incident light, and different polarization disturbances occur in the regions (1), (2), (3), (4), (5), and (6) shown here. appear. However, the bold line in the figure represents the boundary line between the reflecting surfaces. In order to correct this, as shown in FIG. 4, a polarization compensation element 117 composed of a three-divided phase plate 501, a λ / 4 plate 502, and a six-divided λ / 2 plate 503 may be inserted. The λ / 4 plate and the 6-divided λ / 2 plate not only compensate for the polarization, but also have a function of rotating the polarization of the return light by 90 degrees with respect to the incident light. The three-divided phase plate generates a predetermined phase difference φp−φs (φp and φs are phases generated in horizontal polarization and vertical polarization, respectively) between horizontal polarization and vertical polarization in a specific region. It has the role of compensating for the phase difference between the region that passes through the element and the region that does not pass through, and aligning the wavefront of the return light. As an example, Table 1 shows set values of a three-divided phase plate, a λ / 4 plate, and a six-divided λ / 2 plate when the wavelength of light is 405 nm and the medium of the corner cube prism 116 is BK7. As shown in FIG. 4, the angle is defined such that the vertical polarization direction 504 is 0 degree and the counterclockwise direction is positive when viewed from the incident light direction.
次に、光の干渉によって増幅信号と位相誤差信号を得る過程を詳細に説明する。まず、光学系が理想的な状態にある場合を考える。集光レンズ113に入射する光は、水平偏光であるコーナーキューブプリズム116からの戻り光と、垂直偏光である光ディスク109からの戻り光が同軸になったものである。従って光の偏光状態をジョーンズベクトルで表すと
Next, the process of obtaining an amplified signal and a phase error signal by light interference will be described in detail. First, consider a case where the optical system is in an ideal state. The light incident on the condenser lens 113 is obtained by coaxially combining the return light from the corner cube prism 116 that is horizontally polarized light and the return light from the optical disk 109 that is vertically polarized light. Therefore, the polarization state of light can be expressed by Jones vector.

となる。ここでEsは信号光の電場、Erは参照光の電場である。また、このベクトルの第一成分は水平偏光を、第二成分は垂直偏光を表す。この光は無偏光ビームスプリッタ118によって透過光、反射光に2分割され、透過光は軸方向が水平偏光方向から見て22.5度の方向にfast軸を持つλ/2板119を通過する。このときジョーンズベクトルは
It becomes. Here, Es is an electric field of signal light, and Er is an electric field of reference light. The first component of the vector represents horizontal polarization, and the second component represents vertical polarization. This light is split into transmitted light and reflected light by a non-polarizing beam splitter 118, and the transmitted light passes through a λ / 2 plate 119 having a fast axis in the direction of 22.5 degrees when viewed from the horizontal polarization direction. . At this time Jones vector is

となる。次に偏光ビームスプリッタ120によって水平偏光成分が透過し、垂直偏光成分が反射するため、透過する光と反射する光の電場はそれぞれ
It becomes. Next, since the horizontal polarization component is transmitted by the polarization beam splitter 120 and the vertical polarization component is reflected, the electric fields of the transmitted light and the reflected light are respectively

となる。一方、無偏光ビームスプリッタ118を反射した光は、軸方向が水平偏光方向から見て45度の方向にfast軸を持つλ/4板123を通過する。このときジョーンズベクトルは
It becomes. On the other hand, the light reflected by the non-polarizing beam splitter 118 passes through a λ / 4 plate 123 having a fast axis in the direction of 45 degrees as viewed from the horizontal polarization direction. At this time Jones vector is

となる。次に偏光ビームスプリッタ124によって水平偏光成分が透過し、垂直偏光成分が反射するため、透過する光と反射する光の電場はそれぞれ
It becomes. Next, since the horizontal polarization component is transmitted by the polarization beam splitter 124 and the vertical polarization component is reflected, the electric fields of the transmitted light and the reflected light are respectively

となる。従って4つの検出器121,122,125,126の検出信号はそれぞれ、
It becomes. Therefore, the detection signals of the four detectors 121, 122, 125, 126 are respectively




となる。ηは検出器の変換効率である。Δφは信号光の位相と参照光の位相の差、すなわち干渉位相である。これらをそれぞれA1,A2,A3,A4とおくと、差動信号D1,D2はそれぞれ
It becomes. η is the conversion efficiency of the detector. Δφ is the difference between the phase of the signal light and the phase of the reference light, that is, the interference phase. If these are respectively A1, A2, A3, A4, the differential signals D1, D2 are respectively
と表される。出力D1はΔφ=0のとき、
It is expressed. When the output D1 is Δφ = 0,

となり、信号光の電場Esが参照光の電場Erによって増幅された形をしている。したがって光ディスクの反射率が低い等の理由によってEsが小さく、直接信号光を検出しても正しく信号が再生できない場合であっても、信号を増幅して正しく再生することが可能になる。
Thus, the electric field Es of the signal light is amplified by the electric field Er of the reference light. Therefore, even if the Es is small due to the low reflectivity of the optical disk and the signal cannot be reproduced correctly even if the signal light is detected directly, the signal can be amplified and reproduced correctly.
一方、干渉位相Δφは時間とともに変動する。干渉位相Δφは光路長差ΔL、光源の波長λとの間に
On the other hand, the interference phase Δφ varies with time. The interference phase Δφ is between the optical path length difference ΔL and the wavelength λ of the light source.

の関係がある。干渉位相を一定に保つには光路長差を光源の波長より十分小さな精度、すなわち10ナノメートル程度以内に抑える必要がある。前述のように光路長差はアクチュエータ107と可動部114によりゼロになるように調整されるが、通常の焦点ずれ信号によるアクチュエータの制御においては、残差として焦点位置に数10ナノメートルの誤差が残る(通常の再生信号を取得する場合は問題ない)だけでなく、制御時のアクチュエータのわずかな傾きにより余分な光路長差が発生したり、光ディスクのカバー層の厚み誤差による光路長差誤差が発生したりするため、通常は数μm程度の誤差が残ってしまう。ここで出力D2を、本誤差をキャンセルするために利用する。光路長差に対するD1,D2の変化を図5に示す。D1(RF信号)が最大となるΔL=0においてD2はゼロとなり、ちょうどフォーカス誤差信号やトラック誤差信号のようなS字カーブの形になっている。従って本信号を位相誤差信号とし、常にゼロになるように閉ループ制御(以後、位相サーボと呼ぶ)することにより干渉位相の制御が可能となる。本実施例では本誤差信号をピエゾ素子の駆動電圧129にフィードバックしてミラー130を前後方向に動かすことによって光路長(干渉位相)の制御を行っている。この場合、例えば光路長差が正の値にずれた時、ピエゾ素子の駆動電圧が増加し、ミラーが前に押し出されて信号光の光路長が短くなり、光路長差が負の方向に向かう。光路長差が負の方向に動いた場合は逆に光路長差が正の方向に向かう。このようにして干渉位相をゼロに保つことができ、安定な増幅信号を得ることができる。
There is a relationship. In order to keep the interference phase constant, the optical path length difference must be suppressed to an accuracy sufficiently smaller than the wavelength of the light source, that is, within about 10 nanometers. As described above, the optical path length difference is adjusted to be zero by the actuator 107 and the movable portion 114. However, in the control of the actuator by a normal defocus signal, an error of several tens of nanometers is present in the focal position as a residual. In addition to the remaining (no problem when acquiring a normal reproduction signal), an extra optical path length difference occurs due to a slight tilt of the actuator during control, or an optical path length difference error due to an optical disc cover layer thickness error. Usually, an error of about several μm remains. Here, the output D2 is used to cancel this error. FIG. 5 shows changes in D1 and D2 with respect to the optical path length difference. When ΔL = 0 at which D1 (RF signal) is maximum, D2 is zero, which is an S-shaped curve just like a focus error signal or a track error signal. Accordingly, the interference phase can be controlled by using this signal as a phase error signal and performing closed loop control (hereinafter referred to as phase servo) so as to be always zero. In this embodiment, this error signal is fed back to the drive voltage 129 of the piezo element and the mirror 130 is moved in the front-rear direction to control the optical path length (interference phase). In this case, for example, when the optical path length difference is shifted to a positive value, the driving voltage of the piezo element increases, the mirror is pushed forward, the optical path length of the signal light is shortened, and the optical path length difference is in the negative direction. . Conversely, when the optical path length difference moves in the negative direction, the optical path length difference moves in the positive direction. In this way, the interference phase can be kept at zero, and a stable amplified signal can be obtained.
次に、干渉信号出力が不完全な場合について説明する。実際の光ヘッドにおいては、光ヘッド組み立て誤差や部品の加工精度などに起因して、光学系の各種パラメータ、例えばハーフビームスプリッタ118の反射率、透過率、遅延量や、λ/2板119,λ/4板123の遅延量、設定角、あるいは検出器121,122,125,126の変換効率、オフセットなどには、理想的な値からの誤差が重畳する。これらの誤差がある場合、D1,D2は一般に
Next, the case where the interference signal output is incomplete will be described. In the actual optical head, various parameters of the optical system, such as reflectance, transmittance, delay amount of the half beam splitter 118, λ / 2 plate 119, An error from an ideal value is superimposed on the delay amount of the λ / 4 plate 123, the set angle, the conversion efficiency of the detectors 121, 122, 125, 126, the offset, and the like. If these errors exist, D1 and D2 are generally


の形で表される。ここで、aが差動信号D1における信号増幅率、r,b1,b2,δは、光ヘッド光学系自身の持つ特性誤差量を示す定数であり、rが差動信号D1と差動信号D2とに含まれるそれぞれの変動成分の最大振幅の比、b1が差動信号D1に含まれる直流信号成分、b2が差動信号D2に含まれる直流信号成分、δが差動信号D1とD2の位相差である。
It is expressed in the form of Here, a is a signal amplification factor in the differential signal D1, r, b1, b2, and δ are constants indicating the characteristic error amount of the optical head optical system itself, and r is the differential signal D1 and the differential signal D2. Ratio of the maximum amplitude of each fluctuation component included in 1, b1 is a DC signal component included in the differential signal D1, b2 is a DC signal component included in the differential signal D2, and δ is the order of the differential signals D1 and D2. It is a phase difference.
上記の誤差量を含んだ光ヘッドの差動信号出力D1,D2は、図6(a)のように表される。ここで、図中の(1)はオフセット誤差(b2)、(2)は位相誤差(δ)を表す。これらの誤差が存在する場合、D1が最大値を取る位相において、D2がゼロでない値を取るため、このまま位相サーボを駆動すると適切な位相にロックされず、再生信号の増幅率が低下してしまう。このような場合は、図6(b)の白矢印で表されるように、D2にオフセットを与えることにより、位相差ゼロの位置でD2がゼロになるようにすればよい。なお、D1にもオフセットやゲインの誤差が生じるが、従来と同等の信号処理系で十分取り除くことが可能である。
なお、本方式の出力(式14)の二乗を再生信号として扱っても良い。これにより、DVDやブルーレイディスクのような従来の光ディスク信号と同じく、信号光強度に比例した再生信号出力となるため、従来の信号処理系を用いることができる。 The differential signal outputs D1 and D2 of the optical head including the above error amount are expressed as shown in FIG. Here, (1) in the figure represents the offset error (b2), and (2) represents the phase error (δ). When these errors exist, D2 takes a non-zero value in the phase where D1 takes the maximum value. Therefore, if the phase servo is driven as it is, the phase is not locked to an appropriate phase, and the amplification factor of the reproduction signal decreases. . In such a case, as indicated by a white arrow in FIG. 6B, an offset is given to D2, so that D2 becomes zero at a position where the phase difference is zero. Note that offset and gain errors also occur in D1, but can be sufficiently removed by a signal processing system equivalent to the conventional one.
Note that the square of the output of this method (Formula 14) may be treated as a reproduction signal. As a result, since the reproduction signal output is proportional to the signal light intensity, as in the case of conventional optical disc signals such as DVD and Blu-ray disc, a conventional signal processing system can be used.
なお、本方式の出力(式14)の二乗を再生信号として扱っても良い。これにより、DVDやブルーレイディスクのような従来の光ディスク信号と同じく、信号光強度に比例した再生信号出力となるため、従来の信号処理系を用いることができる。 The differential signal outputs D1 and D2 of the optical head including the above error amount are expressed as shown in FIG. Here, (1) in the figure represents the offset error (b2), and (2) represents the phase error (δ). When these errors exist, D2 takes a non-zero value in the phase where D1 takes the maximum value. Therefore, if the phase servo is driven as it is, the phase is not locked to an appropriate phase, and the amplification factor of the reproduction signal decreases. . In such a case, as indicated by a white arrow in FIG. 6B, an offset is given to D2, so that D2 becomes zero at a position where the phase difference is zero. Note that offset and gain errors also occur in D1, but can be sufficiently removed by a signal processing system equivalent to the conventional one.
Note that the square of the output of this method (Formula 14) may be treated as a reproduction signal. As a result, since the reproduction signal output is proportional to the signal light intensity, as in the case of conventional optical disc signals such as DVD and Blu-ray disc, a conventional signal processing system can be used.
図1に示した光ヘッドと同等の機能は他の構成でも実現可能であり、原理的には3つ以上の検出器で、各検出器上での信号光と参照光の位相差が互いに異なるように検出を行えばよい。例として、図7に、光ヘッドの検出光学系を3つの検出器を用いて構成した場合の光ディスク装置の構成例を示す。なお、図7において、信号処理回路やプロセッサなど、他の構成要素は図1に示す光ディスク装置の構成と同一であるものとする。図7に示す光学系では、信号光と参照光の位相差が各検出器上でそれぞれ0度、120度、240度となる。集光レンズ113を通過した光は、無偏光ビームスプリッタ701,702によって3つの光束に分割され、それぞれ45度偏光を透過する偏光子703,704,705を通過したのちに検出器706,707,708によって検出される。この3つの光束のうち、ひとつには信号光と参照光の間に第1の位相差を発生させる位相板709が、もうひとつには信号光と参照光との間に第2の位相差を発生させる位相板710がそれぞれ挿入されている。なお、本実施例では、第1の位相差を60度、第2の位相差を-60度となるように位相板を設定した。
なお、ここで位相差とは、位相板において発生する水平偏光成分の位相に対する、垂直偏光成分の位相の符号付き大きさである。また、各検出器上での光量が等しくなるように、無偏光ビームスプリッタ701は透過率と反射率の比が1対2に、無偏光ビームスプリッタ702は透過率と反射率が等しくなるようなものを使用する。 Functions equivalent to those of the optical head shown in FIG. 1 can be realized by other configurations. In principle, the phase difference between the signal light and the reference light on each detector is different between three or more detectors. Detection may be performed as follows. As an example, FIG. 7 shows an example of the configuration of an optical disc apparatus when the detection optical system of the optical head is configured using three detectors. In FIG. 7, other components such as a signal processing circuit and a processor are the same as those of the optical disc apparatus shown in FIG. In the optical system shown in FIG. 7, the phase difference between the signal light and the reference light is 0 degrees, 120 degrees, and 240 degrees on each detector, respectively. The light that has passed through thecondenser lens 113 is divided into three light beams by non-polarizing beam splitters 701 and 702, and after passing through polarizers 703, 704, and 705 that transmit 45-degree polarized light, respectively, detectors 706, 707, 708 is detected. Of these three luminous fluxes, one is a phase plate 709 that generates a first phase difference between the signal light and the reference light, and the other is a second phase difference between the signal light and the reference light. Each of the phase plates 710 to be generated is inserted. In this embodiment, the phase plate is set so that the first phase difference is 60 degrees and the second phase difference is −60 degrees.
Here, the phase difference is a signed magnitude of the phase of the vertical polarization component with respect to the phase of the horizontal polarization component generated in the phase plate. Further, thenon-polarizing beam splitter 701 has a ratio of transmittance to reflectance of 1: 2, and the non-polarizing beam splitter 702 has the same transmittance and reflectance so that the amount of light on each detector is equal. Use things.
なお、ここで位相差とは、位相板において発生する水平偏光成分の位相に対する、垂直偏光成分の位相の符号付き大きさである。また、各検出器上での光量が等しくなるように、無偏光ビームスプリッタ701は透過率と反射率の比が1対2に、無偏光ビームスプリッタ702は透過率と反射率が等しくなるようなものを使用する。 Functions equivalent to those of the optical head shown in FIG. 1 can be realized by other configurations. In principle, the phase difference between the signal light and the reference light on each detector is different between three or more detectors. Detection may be performed as follows. As an example, FIG. 7 shows an example of the configuration of an optical disc apparatus when the detection optical system of the optical head is configured using three detectors. In FIG. 7, other components such as a signal processing circuit and a processor are the same as those of the optical disc apparatus shown in FIG. In the optical system shown in FIG. 7, the phase difference between the signal light and the reference light is 0 degrees, 120 degrees, and 240 degrees on each detector, respectively. The light that has passed through the
Here, the phase difference is a signed magnitude of the phase of the vertical polarization component with respect to the phase of the horizontal polarization component generated in the phase plate. Further, the
以上をまとめると、検出器708には、信号光と参照光とで位相差の無い干渉光が、検出器706には、第1の位相差を持った干渉光が、検出器710には、第2の位相差を持った干渉光がそれぞれ入力される。このとき、位相差の無い干渉光の光の強度をI1、第1の位相差を持った干渉光の強度をI2、第2の位相差を持った干渉光の強度をI3とすると、I1,I2,I3は次式のように表せる。
In summary, the detector 708 has interference light having no phase difference between the signal light and the reference light, the detector 706 has interference light having the first phase difference, and the detector 710 has Interfering light having a second phase difference is input. At this time, assuming that the intensity of the interference light having no phase difference is I1, the intensity of the interference light having the first phase difference is I2, and the intensity of the interference light having the second phase difference is I3, I1, I2 and I3 can be expressed as follows.



次に、これらの出力信号を演算回路711に入力し、以下の出力D1,D2を生成する。
Next, these output signals are input to the arithmetic circuit 711, and the following outputs D1 and D2 are generated.


式21で表される差動信号は、第1の位相差を有する干渉光と第2の位相差を有する干渉光強度出力の平均値から位相差180度の干渉光強度出力を引いた信号であり、式22で表される差動信号は、第1の位相差を有する干渉光強度出力と第2の位相差を有する干渉光強度出力との差分信号に√3/2を乗算したものである。
The differential signal represented by Equation 21 is a signal obtained by subtracting the interference light intensity output with a phase difference of 180 degrees from the average value of the interference light intensity output with the first phase difference and the interference light intensity output with the second phase difference. The differential signal represented by Equation 22 is obtained by multiplying the difference signal between the interference light intensity output having the first phase difference and the interference light intensity output having the second phase difference by √3 / 2. is there.
これらは図1に示す4つの検出器の例における差動信号D1,D2と同じ形をしている。従って上記のようにD1を再生信号、D2を位相誤差信号として用いることで同様の効果を得ることができる。このように、より少ない検出器点数でも同様の効果を得ることができる。実際の光学系で検出される差動信号には、光ヘッドの組み立て誤差などに起因する誤差が重畳するため、図6で説明したようなオフセット処理などを施して、信号処理を行えばよい。
These have the same shape as the differential signals D1 and D2 in the example of the four detectors shown in FIG. Therefore, the same effect can be obtained by using D1 as the reproduction signal and D2 as the phase error signal as described above. Thus, the same effect can be obtained even with a smaller number of detector points. Since an error caused by an optical head assembly error or the like is superimposed on the differential signal detected by the actual optical system, the signal processing may be performed by performing the offset processing described with reference to FIG.
図8には、干渉光学系と検出光学系の更に別の構成例を示す。図8においても、光ヘッド以外の構成要素は図1に示す光ディスク装置の構成と同一であり、従って説明は省略する。図8に示す光ヘッド光学系の干渉光学系では、参照光反射手段として、コーナーキューブプリズム116と偏光補償素子117の代わりに、ミラー801と当該ミラーに入射光束を集光する集光レンズ802が搭載されている。このような構成でもコーナーキューブプリズム116と同様に素子の傾きによる干渉信号振幅の劣化を抑えることができる。また、干渉信号を得るための光学系は、干渉光学素子803と検出器804によって構成されている。干渉光学素子803と検出器804の詳細を図9Aに示す。干渉光学素子803は、無偏光回折素子901と、異方性媒質902と、ウォラストンプリズム903とからなる。入射する信号光を垂直偏光、参照光を水平偏光とすると、入射光はまず無偏光回折格子901によって0次光と1次光に分割され、それぞれ異方性媒質902に入射する。1次回折光は入射光に対して水平方向に方向を変えて出射される。ここで、異方性媒質の光学軸は、0次光の進行方向を向いているため、1次回折光のみ信号光と参照光との間に遅延が生じ、遅延がπ/2(光路長差λ/4)となるように媒質の厚みが設定されている。その後これらの光束はウォラストンプリズム903に入射し、それぞれ2分割されて検出器904上に配置された4つの受光部により検出される。ウォラストンプリズム903の光線分離方向は、0次光から見て水平方向に対して±45度の方向である。このような構成において、無偏光回折格子901、異方性媒質902、ウォラストンプリズム903はそれぞれ、ハーフビームスプリッタ118、λ/4板123、偏光ビームスプリッタ120と同等の機能を持ち、図1の構成と同じように再生信号と位相誤差信号を得ることが可能である。検出器の詳細は図9Bに示すとおりである。受光部905,906,907,908は、図1に示す検出器121,122,125,126にそれぞれ対応し、差動回路907,910によりそれぞれ再生信号、位相誤差信号が得られる。差動回路907,910は検出器904に組み込まれており、受光部の検出電流の差分を差動回路によって出力したものをトランスインピーダンスアンプによって電圧信号に変換している。
FIG. 8 shows still another configuration example of the interference optical system and the detection optical system. Also in FIG. 8, the components other than the optical head are the same as those of the optical disk apparatus shown in FIG. In the interference optical system of the optical head optical system shown in FIG. 8, a mirror 801 and a condensing lens 802 that condenses the incident light beam on the mirror are used as reference light reflecting means instead of the corner cube prism 116 and the polarization compensating element 117. It is installed. Even with such a configuration, similarly to the corner cube prism 116, it is possible to suppress the degradation of the interference signal amplitude due to the tilt of the element. In addition, an optical system for obtaining an interference signal includes an interference optical element 803 and a detector 804. Details of the interference optical element 803 and the detector 804 are shown in FIG. 9A. The interference optical element 803 includes a non-polarization diffraction element 901, an anisotropic medium 902, and a Wollaston prism 903. When the incident signal light is vertically polarized light and the reference light is horizontally polarized light, the incident light is first divided into zero-order light and first-order light by the non-polarization diffraction grating 901 and is incident on the anisotropic medium 902. The first-order diffracted light is emitted with its direction changed in the horizontal direction with respect to the incident light. Here, since the optical axis of the anisotropic medium faces the traveling direction of the 0th-order light, only the 1st-order diffracted light has a delay between the signal light and the reference light, and the delay is π / 2 (the optical path length difference). The thickness of the medium is set so that λ / 4). Thereafter, these light beams enter the Wollaston prism 903 and are detected by the four light receiving units arranged on the detector 904 after being divided into two. The light separation direction of the Wollaston prism 903 is ± 45 degrees with respect to the horizontal direction when viewed from the 0th order light. In such a configuration, the non-polarization diffraction grating 901, the anisotropic medium 902, and the Wollaston prism 903 have the same functions as the half beam splitter 118, the λ / 4 plate 123, and the polarization beam splitter 120, respectively. As with the configuration, it is possible to obtain a reproduction signal and a phase error signal. Details of the detector are as shown in FIG. 9B. The light receiving units 905, 906, 907, and 908 correspond to the detectors 121, 122, 125, and 126 shown in FIG. 1, respectively, and a reproduction signal and a phase error signal are obtained by the differential circuits 907 and 910, respectively. The differential circuits 907 and 910 are incorporated in the detector 904, and the output of the difference between the detection currents of the light receiving unit by the differential circuit is converted into a voltage signal by the transimpedance amplifier.
光路長差固定位置調整を実行するための光路長差の制御機構は、図1のように干渉光学系の反射光光路上ではなく、参照光光路上に配置しても良い。図10には、光路長差の制御機構として、一対のくさび型プリズム1001,1002を2次元アクチュエータ107上に搭載された収差補正素子117と偏光ビームスプリッタ104との間に配置した構成例を示す。位相誤差信号は、図7,図8に示される構成例と同様に、図示されないサーボ回路79を介して介してくさび型プリズム1001,1002の組にフィードバックされ、位相制御が実行される。図11には、一対のくさび型プリズム1001,1002の相対的な配置関係を示す。片方のプリズム(本実施例ではプリズム1002)はアクチュエータ1003に搭載されており、アクチュエータを光軸方向に動かすことにより光路長の制御が可能である。光路長は、アクチュエータを光軸と垂直方向(紙面に対して左右の方向)に動かしても制御可能である。
例としてくさび型プリズム1001,1002の傾斜角(定義は図11参照)θ=15度、媒質BK7、光源波長λ=405nmとしたとき、位相誤差信号の最大値と最小値の間に対応する光路長差λ/2発生させるのに必要なくさび型プリズムの移動距離は10μmとなる(図12参照)。これは通常の焦点ずれ信号のS字信号の最大値、最小値間の対物レンズの移動量と同程度である。 The optical path length difference control mechanism for executing the optical path length difference fixed position adjustment may be arranged on the reference light optical path instead of the reflected light optical path of the interference optical system as shown in FIG. FIG. 10 shows a configuration example in which a pair of wedge-shaped prisms 1001 and 1002 is arranged between the aberration correction element 117 mounted on the two-dimensional actuator 107 and the polarization beam splitter 104 as a control mechanism for the optical path length difference. . Similarly to the configuration example shown in FIGS. 7 and 8, the phase error signal is fed back to the set of wedge-shaped prisms 1001 and 1002 via a servo circuit 79 (not shown), and phase control is executed. FIG. 11 shows a relative arrangement relationship between the pair of wedge-shaped prisms 1001 and 1002. One prism (prism 1002 in this embodiment) is mounted on the actuator 1003, and the optical path length can be controlled by moving the actuator in the optical axis direction. The optical path length can also be controlled by moving the actuator in a direction perpendicular to the optical axis (left and right direction with respect to the paper surface).
As an example, when the inclination angles ofwedge prisms 1001 and 1002 (see FIG. 11 for definition) θ = 15 degrees, medium BK7, and light source wavelength λ = 405 nm, the optical path corresponding to the maximum value and the minimum value of the phase error signal It is not necessary to generate the length difference λ / 2, and the movement distance of the wedge-shaped prism is 10 μm (see FIG. 12). This is about the same as the amount of movement of the objective lens between the maximum value and the minimum value of the S-shaped signal of the normal defocus signal.
例としてくさび型プリズム1001,1002の傾斜角(定義は図11参照)θ=15度、媒質BK7、光源波長λ=405nmとしたとき、位相誤差信号の最大値と最小値の間に対応する光路長差λ/2発生させるのに必要なくさび型プリズムの移動距離は10μmとなる(図12参照)。これは通常の焦点ずれ信号のS字信号の最大値、最小値間の対物レンズの移動量と同程度である。 The optical path length difference control mechanism for executing the optical path length difference fixed position adjustment may be arranged on the reference light optical path instead of the reflected light optical path of the interference optical system as shown in FIG. FIG. 10 shows a configuration example in which a pair of wedge-shaped
As an example, when the inclination angles of
図13,図14には、光路長差の粗調整機構の別の構成例について示す。図1,図7および図8に示す構成例では、光路長差の粗調整機構として、コーナーキューブプリズム116が対物レンズ108と同一のアクチュエータに搭載されている構成となっていたが、図13のようにこれらが別々のアクチュエータに搭載されていても同様の制御を行うことが可能である。この場合、検出器111で検出された焦点ずれ信号FESが、サーボ回路79を介して、2次元アクチュエータ107とコーナーキューブプリズム116が搭載されているアクチュエータ1301の両方に入力されることにより、光路長差の粗調整が実現できる。図13に示す構成は、図1,図7,図8に示す構成と比較して、アクチュエータ単体への重量負荷が軽減されるため、高速な光路長の調整動作が可能となる。図14には、図13に示す構成において、可動部114やプリズムミラー115を省略した構成を示す。この場合、光路長差固定位置調整はアクチュエータ1301で実行される。この場合、アクチュエータ1301への駆動電流として、焦点ずれ信号にDC成分を加えたものを入力し、DC成分の大きさを変化させることにより光路長差固定位置の調整を行えばよい。
FIG. 13 and FIG. 14 show another configuration example of the optical path length difference coarse adjustment mechanism. In the configuration examples shown in FIGS. 1, 7, and 8, the corner cube prism 116 is mounted on the same actuator as the objective lens 108 as a rough adjustment mechanism for the optical path length difference. Thus, even if these are mounted on separate actuators, the same control can be performed. In this case, the defocus signal FES detected by the detector 111 is input to both the two-dimensional actuator 107 and the actuator 1301 on which the corner cube prism 116 is mounted via the servo circuit 79, whereby the optical path length. A rough adjustment of the difference can be realized. The configuration shown in FIG. 13 can reduce the weight load on the actuator alone as compared with the configurations shown in FIGS. 1, 7, and 8, so that a high-speed optical path length adjustment operation can be performed. FIG. 14 shows a configuration in which the movable portion 114 and the prism mirror 115 are omitted from the configuration shown in FIG. In this case, the optical path length difference fixed position adjustment is executed by the actuator 1301. In this case, as the drive current to the actuator 1301, a signal obtained by adding a DC component to the defocus signal may be input, and the optical path length difference fixed position may be adjusted by changing the magnitude of the DC component.
以上説明した各種の信号処理や制御処理は、信号処理回路25やマイクロプロセッサ27などにより実行される。図20には、信号処理回路25の回路ブロックの構成の具体例を示す。再生信号RFはAD変換回路2101によってデジタル化され、デジタル信号出力Sが得られる。AD変換器のサンプリングのタイミングは、デジタル信号出力Sと電圧制御可変周波数発信器(VCO)2102の出力を位相比較器2103によって位相比較し、位相比較器の出力をローパスフィルタ(LPF)2104によって平均化して、VCOの制御入力へとフィードバックすることによって生成している。すなわち、位相比較器2103,VCO2102,LPF2104によって構成されたPLL(Phase-locked loop)回路によって位相制御されたクロック出力(CK)を得て、AD変換のタイミングを制御している。
デジタル再生信号Sは、適当なデジタル等化処理の後、復調回路24やアドレス検出回路23に入力され、復号回路26によって、ユーザデータとして、メモリ29やマイクロプロセッサ27に送られる。マイクロプロセッサは、上位装置99からの指示によって、サーボ回路79や自動位置制御手段76を制御し、任意のアドレスに光スポット37を位置づける。マイクロプロセッサ27は上位装置からの指示が再生か記録かによって、レーザドライバ28を制御し、レーザ101を適当なパワー/波形で発光させる。また、ビームエキスパンダ1101,可動部114を光軸方向に動かし、信号品質が最も良くなる位置に固定する。サーボ回路79は、焦点ずれ信号、トラックずれ信号に基づき2次元アクチュエータ107を制御し、光ディスク109の記録面に集光され、記録トラックを追従するようにする。また、差動回路128より生成される位相誤差信号に基づきピエゾ素子801を制御し、干渉位相がゼロになるようにする。 The various signal processing and control processing described above are executed by thesignal processing circuit 25, the microprocessor 27, and the like. FIG. 20 shows a specific example of the circuit block configuration of the signal processing circuit 25. The reproduction signal RF is digitized by the AD conversion circuit 2101 to obtain a digital signal output S. As for the sampling timing of the AD converter, the digital signal output S and the output of the voltage controlled variable frequency oscillator (VCO) 2102 are phase-compared by the phase comparator 2103, and the output of the phase comparator is averaged by the low-pass filter (LPF) 2104. And fed back to the control input of the VCO. That is, a phase-controlled clock output (CK) is obtained by a phase-locked loop (PLL) circuit constituted by a phase comparator 2103, a VCO 2102, and an LPF 2104, and AD conversion timing is controlled.
The digital reproduction signal S is input to thedemodulation circuit 24 and the address detection circuit 23 after appropriate digital equalization processing, and sent to the memory 29 and the microprocessor 27 as user data by the decoding circuit 26. The microprocessor controls the servo circuit 79 and the automatic position control means 76 according to an instruction from the host device 99, and positions the light spot 37 at an arbitrary address. The microprocessor 27 controls the laser driver 28 depending on whether the instruction from the host device is reproduction or recording, and causes the laser 101 to emit light with an appropriate power / waveform. Further, the beam expander 1101 and the movable unit 114 are moved in the optical axis direction and fixed at a position where the signal quality is the best. The servo circuit 79 controls the two-dimensional actuator 107 based on the defocus signal and the track shift signal, and is focused on the recording surface of the optical disc 109 so as to follow the recording track. Further, the piezo element 801 is controlled based on the phase error signal generated from the differential circuit 128 so that the interference phase becomes zero.
デジタル再生信号Sは、適当なデジタル等化処理の後、復調回路24やアドレス検出回路23に入力され、復号回路26によって、ユーザデータとして、メモリ29やマイクロプロセッサ27に送られる。マイクロプロセッサは、上位装置99からの指示によって、サーボ回路79や自動位置制御手段76を制御し、任意のアドレスに光スポット37を位置づける。マイクロプロセッサ27は上位装置からの指示が再生か記録かによって、レーザドライバ28を制御し、レーザ101を適当なパワー/波形で発光させる。また、ビームエキスパンダ1101,可動部114を光軸方向に動かし、信号品質が最も良くなる位置に固定する。サーボ回路79は、焦点ずれ信号、トラックずれ信号に基づき2次元アクチュエータ107を制御し、光ディスク109の記録面に集光され、記録トラックを追従するようにする。また、差動回路128より生成される位相誤差信号に基づきピエゾ素子801を制御し、干渉位相がゼロになるようにする。 The various signal processing and control processing described above are executed by the
The digital reproduction signal S is input to the
図21は可動部やアクチュエータの制御の手順の一例を示したフローチャートである。まず、焦点ずれ信号、トラックずれ信号、光路長差固定位置、球面収差補正量の粗調整を行う(順番は任意)。焦点ずれ信号、トラックずれ信号に関しては電気的なオフセットを除去すればよく、光路長差固定位置、球面収差補正量に関してはディスクの種類や再生する層番号などに応じて特定の値を設定すればよい。次に焦点ずれ信号、トラックずれ信号に基づいてフォーカスサーボ、トラックサーボをこの順に駆動する。次に位相誤差信号の振幅が最大となるよう、可動部114を駆動して光路長差の調整を行う(光路長差固定位置粗調整)。次に位相誤差信号に基づき位相サーボを駆動する。この時点で安定化された再生信号が取得できるため、最後に再生信号品質をモニタしながら、焦点ずれ信号のオフセット、トラックずれ信号のオフセット、光路長差固定位置、球面収差補正量のそれぞれについて、再生信号品質が最も良くなる位置を探索、学習して設定する(FESオフセット微調整、TESオフセット微調整、光路長固定位置微調整、球面収差補正微調整)。
FIG. 21 is a flowchart showing an example of a procedure for controlling the movable part and the actuator. First, coarse adjustment is performed for the defocus signal, the track shift signal, the optical path length difference fixed position, and the spherical aberration correction amount (the order is arbitrary). It is only necessary to remove the electrical offset for the focus error signal and the track error signal, and the optical path length difference fixed position and the spherical aberration correction amount should be set to specific values according to the type of disk, the layer number to be reproduced, and the like. Good. Next, the focus servo and the track servo are driven in this order based on the focus error signal and the track error signal. Next, the optical path length difference is adjusted by driving the movable portion 114 so that the amplitude of the phase error signal is maximized (optical path length difference fixed position coarse adjustment). Next, the phase servo is driven based on the phase error signal. Since the playback signal stabilized at this point can be acquired, the focus error signal offset, the track error signal offset, the optical path length difference fixed position, and the spherical aberration correction amount are respectively monitored while finally monitoring the reproduction signal quality. A position where the reproduction signal quality is the best is searched, learned and set (FES offset fine adjustment, TES offset fine adjustment, optical path length fixed position fine adjustment, spherical aberration correction fine adjustment).
光路長差固定位置微調整の具体的方法の一例を説明する。まず、位相誤差信号に付加するオフセット値を調整することで、干渉信号品質が最も良くなる位置を探索する。次に、以下に説明するような位相ジャンプを行う。光路長差が変化したときの位相誤差信号は図22のようになる。図の黒丸が位相ゼロの位置であり、位相サーボ駆動時はこのうちのいずれかに固定される。このとき、隣接する黒丸の位置には、光路長差を位置誤差信号PESの周期に対応する量だけ変化させる(以下、位相ジャンプと呼ぶ)ことにより移動させることができる。制御上は、光路長差の微調整手段(例えば、図1のミラー130とピエゾ素子129)に対して、位相ジャンプを発生させるための位相ジャンプ信号を供給することにより実現される。位相ジャンプ信号は目標位置に移動させるための移動パルスと、目標位置付近で移動を止める制動パルスからなり、サーボ信号回路により生成される。従って、位相ジャンプによって任意の位相ゼロの位置に移動することができるため、再生信号品質が最も良くなる場所を探索、学習して設定すればよい。
An example of a specific method of fine adjustment of the optical path length difference fixed position will be described. First, the position where the interference signal quality is the best is searched by adjusting the offset value added to the phase error signal. Next, a phase jump as described below is performed. The phase error signal when the optical path length difference changes is as shown in FIG. The black circle in the figure is the position of phase zero, and is fixed to one of these during phase servo driving. At this time, the position of the adjacent black circle can be moved by changing the optical path length difference by an amount corresponding to the period of the position error signal PES (hereinafter referred to as phase jump). The control is realized by supplying a phase jump signal for generating a phase jump to a fine adjustment means (for example, the mirror 130 and the piezo element 129 in FIG. 1) of the optical path length difference. The phase jump signal is composed of a movement pulse for moving to a target position and a braking pulse for stopping movement near the target position, and is generated by a servo signal circuit. Therefore, since it is possible to move to an arbitrary phase zero position by the phase jump, it is only necessary to search, learn and set a place where the reproduction signal quality is the best.
このような探索動作あるいは学習動作は、メモリ28、マイクロプロセッサ27およびサーボ回路79により実行される。サーボ回路79は、光路長固定位置調整手段ないし光路長差微調整手段に対し位相ジャンプ信号を供給し、光路長固定位置調整手段ないし光路長差微調整手段は位相ジャンプ信号に従って光ヘッド光学系の光路長を所定量だけ変化させる。ここで、位相ジャンプ信号は光路長差がおよそ光源の波長程度ジャンプするように予め位相サーボ回路79に設定されている。このため位相ジャンプが終了した直後に再び位相サーボが駆動され、光路長差はちょうど1波長分ずれた位置に固定される。なお、位相ジャンプは1波長分とは限らず、2波長分など、波長の整数倍だけジャンプするような位相ジャンプ信号を用いてもよい。
Such search operation or learning operation is executed by the memory 28, the microprocessor 27, and the servo circuit 79. The servo circuit 79 supplies a phase jump signal to the optical path length fixed position adjusting means or the optical path length difference fine adjusting means, and the optical path length fixed position adjusting means or the optical path length difference fine adjusting means is used for the optical head optical system according to the phase jump signal. The optical path length is changed by a predetermined amount. Here, the phase jump signal is preset in the phase servo circuit 79 so that the optical path length difference jumps by about the wavelength of the light source. Therefore, the phase servo is driven again immediately after the phase jump is completed, and the optical path length difference is fixed at a position shifted by exactly one wavelength. The phase jump is not limited to one wavelength, and a phase jump signal that jumps by an integral multiple of the wavelength, such as two wavelengths, may be used.
本実施例はDVDやブルーレイディスクのような、通常の光ディスクの再生を前提としているが、入射光と変調された信号光がコヒーレントで同一の波長であれば、特に形態は問わない。例えばホログラムメモリや、近接場メモリなどの大容量メモリにおいても本発明は適用可能である。
This embodiment is premised on reproduction of a normal optical disc such as a DVD or a Blu-ray disc, but the form is not particularly limited as long as the incident light and the modulated signal light are coherent and have the same wavelength. For example, the present invention can be applied to a large capacity memory such as a hologram memory or a near field memory.
以上、本実施例の光ディスク装置により、光ピックアップ光学系の持つ光路長の揺らぎを調整する機能を備えた光ディスク装置およびその機能を実現するために必要な機構を備え、このために安定した増幅信号を得ることが可能な光ピックアップが実現される。
As described above, the optical disk apparatus according to the present embodiment includes the optical disk apparatus having the function of adjusting the fluctuation of the optical path length of the optical pickup optical system and the mechanism necessary for realizing the function, and a stable amplified signal for this purpose. An optical pickup capable of obtaining the above is realized.
図15には、光路長差固定位置調整と位相サーボを同一の可動部によって行う形態の光ディスク装置の構成例を示す。図15では、光ディスクの構成要素のうち、光ヘッドの光学系およびアクチュエータ、光ディスクおよび光ディスク支持機構のみを示し、図1と共通な構成要素については図示を省略している。しかし実際には、再生信号処理ブロック2やマイクロプロセッサ27、あるいはサーボ回路79など、図1と同様な構成例を含んでいる。図15に示す光ディスク装置では、図1に示されるプリズムミラー115をアクチュエータ1501に搭載し、アクチュエータ1501の駆動電流として、位相誤差信号にマイクロプロセッサ27からサーボ回路79へ指示された所定のDC成分を付加したものを入力する。ここでDC成分の値を調整することにより光路長差固定位置の調整を行い、位相誤差信号成分を用いて位相サーボを駆動する。DC成分の大きさは、アクチュエータ1501の移動量が実施例1の可動部114に与えられる移動量と同様に、多層光ディスクの異なる層や光ディスクの種類などに応じて所定の値に決定さる。すなわち、DC成分の値を調整することが、実施例1における可動部114の移動量調整と同じく、光路長差固定位置を調整する役割を担っている。
FIG. 15 shows a configuration example of an optical disc apparatus in which the optical path length difference fixed position adjustment and the phase servo are performed by the same movable part. FIG. 15 shows only the optical system and actuator of the optical head, the optical disc, and the optical disc support mechanism among the components of the optical disc, and the components common to FIG. 1 are not shown. However, actually, the reproduction signal processing block 2, the microprocessor 27, the servo circuit 79, and the like are included in the same configuration example as in FIG. In the optical disk apparatus shown in FIG. 15, the prism mirror 115 shown in FIG. 1 is mounted on the actuator 1501, and a predetermined DC component instructed from the microprocessor 27 to the servo circuit 79 is added to the phase error signal as a drive current of the actuator 1501. Enter what you added. Here, the position of the optical path length difference is adjusted by adjusting the value of the DC component, and the phase servo is driven using the phase error signal component. The magnitude of the DC component is determined to be a predetermined value in accordance with the different layers of the multilayer optical disk, the type of the optical disk, and the like, in the same way as the movement amount of the actuator 1501 given to the movable unit 114 of the first embodiment. That is, adjusting the value of the DC component plays the role of adjusting the optical path length difference fixed position, like the movement amount adjustment of the movable portion 114 in the first embodiment.
このような構成とすることで、部品点数を削減し、光学系を小型に構成することが可能である。
With such a configuration, it is possible to reduce the number of parts and to make the optical system compact.
図16には、3次元アクチュエータ1601によって位相サーボを行う機能を備えた光ディスク装置の構成例を示す。図16も、図15同様、図1と共通な構成要素については図示を省略しているが、実際の制御動作を実行するための構成要素を含む。3次元アクチュエータ1601とは、通常の2次元アクチュエータに加え、光軸方向の傾きの制御が可能なアクチュエータである。この光軸方向の傾きにより、信号光と参照光の光路長差が変化する為、位相誤差信号PESを光軸方向の傾きにフィードバックして位相サーボを駆動する。なお、位相誤差信号PESを生成するための光学系の構成・機能などは、図1と同様であるので説明は省略する。
FIG. 16 shows a configuration example of an optical disc apparatus having a function of performing phase servo by the three-dimensional actuator 1601. In FIG. 16, as in FIG. 15, components common to those in FIG. 1 are omitted, but include components for executing the actual control operation. The three-dimensional actuator 1601 is an actuator capable of controlling the tilt in the optical axis direction in addition to a normal two-dimensional actuator. Since the optical path length difference between the signal light and the reference light changes due to the inclination in the optical axis direction, the phase servo is driven by feeding back the phase error signal PES to the inclination in the optical axis direction. The configuration and function of the optical system for generating the phase error signal PES are the same as those in FIG.
このような構成とすることで実施例2と同様に、光路長差調整に必要な部品点数の削減を行うことができ、光学系を小型に構成することが可能である。
By adopting such a configuration, similarly to the second embodiment, it is possible to reduce the number of parts necessary for adjusting the optical path length difference, and it is possible to make the optical system compact.
図17には、光路長差の粗調整、固定位置調整、微調整を同一の素子で行う機能を備えた光ディスク装置の構成例を示す。図17も、図15および図16と同様、図1と共通な構成要素については図示を省略している。図17に示す光ディスク装置では、対物レンズ108やコーナーキューブプリズム116を搭載するアクチュエータが3次元アクチュエータ1601により構成されており、XYZ方向への駆動の他、搭載される光学素子を光軸に対して傾けるように可動できる。光路長の粗調整動作は3次元アクチュエータ1601のZ方向への移動により実行され、固定位置調整および微調整動作は、X方向あるいはY方向を回転軸とする回転動作により、対物レンズ108やコーナーキューブプリズム116の光軸に対する傾きを変えて実行される。3次元アクチュエータ1601は、サーボ回路79で制御される。光軸方向の傾きを調整するための制御信号としては、光路長差固定位置の調整のためのDC電流をオフセットとして加えられた位相誤差信号電流が入力される。
FIG. 17 shows a configuration example of an optical disc apparatus having a function of performing rough adjustment, fixed position adjustment, and fine adjustment of the optical path length difference with the same element. In FIG. 17, as in FIGS. 15 and 16, the components common to FIG. 1 are not shown. In the optical disk apparatus shown in FIG. 17, the actuator on which the objective lens 108 and the corner cube prism 116 are mounted is constituted by a three-dimensional actuator 1601, and in addition to driving in the XYZ directions, the mounted optical element is moved with respect to the optical axis. Movable to tilt. The coarse adjustment operation of the optical path length is executed by the movement of the three-dimensional actuator 1601 in the Z direction, and the fixed position adjustment and the fine adjustment operation are performed by the rotation operation about the X direction or the Y direction as the rotation axis. This is executed by changing the inclination of the prism 116 with respect to the optical axis. The three-dimensional actuator 1601 is controlled by the servo circuit 79. As a control signal for adjusting the tilt in the optical axis direction, a phase error signal current added with a DC current for adjusting the optical path length difference fixed position as an offset is input.
このような構成とすることで実施例2、実施例3と同様に、光路長差調整に必要な部品点数の削減を行うことができ、光学系を小型に構成することが可能である。
By adopting such a configuration, it is possible to reduce the number of parts necessary for adjusting the optical path length difference and to make the optical system compact in the same manner as in the second and third embodiments.
本実施例は、実施例1の光ディスク装置の無偏光ビームスプリッタ118の反射率および透過率が異なる場合の構成例である。実施例1における無偏光ビームスプリッタ118は一般的な、反射率と透過率が等しいもの(ハーフビームスプリッタ)であった。差動信号D1には再生信号成分が含まれるため、検出器121,122は再生信号を取得するのに十分な帯域が必要である。一方差動信号D2は再生信号成分がカットされている必要があるため、検出器124,125は検出器121,122に比べて要求される帯域が狭い。一般に、検出器のアンプゲインとカットオフ周波数はトレードオフの関係にあるため、検出器124,125は相対的に検出器のアンプゲインを高く設定することができ、その結果必要とされる光信号の大きさは相対的に小さくなる。すなわち、無偏光ビームスプリッタ118の透過率を反射率よりも大きく設定することにより、再生信号の振幅を大きくすることができる。たとえばブルーレイディスクを4倍速で再生すると仮定した場合、再生信号には100MHz、位相誤差信号には200kHz程度の帯域が必要であるため、無偏光ビームスプリッタの反射率は透過率の1%程度に設定すれば十分である。
This embodiment is a configuration example in the case where the reflectance and transmittance of the non-polarizing beam splitter 118 of the optical disc apparatus of Embodiment 1 are different. The non-polarizing beam splitter 118 in the first embodiment is a general one (half beam splitter) having the same reflectance and transmittance. Since the differential signal D1 includes a reproduction signal component, the detectors 121 and 122 need a sufficient band for acquiring the reproduction signal. On the other hand, since the differential signal D2 needs to have the reproduction signal component cut off, the detectors 124 and 125 require a narrower band than the detectors 121 and 122. In general, since the detector amplifier gain and the cutoff frequency are in a trade-off relationship, the detectors 124 and 125 can set the amplifier gain of the detector relatively high, and as a result, the required optical signal. Is relatively small. That is, the amplitude of the reproduction signal can be increased by setting the transmittance of the non-polarizing beam splitter 118 to be larger than the reflectance. For example, assuming that a Blu-ray disc is played back at 4 × speed, the reproduction signal needs a bandwidth of about 100 MHz and the phase error signal of about 200 kHz, so the reflectance of the non-polarizing beam splitter is set to about 1% of the transmittance. It is enough.
本構成により、信号増幅効果をより大きくすることができ、光ディスク装置の性能を一段と向上させることが可能となる。
With this configuration, the signal amplification effect can be further increased, and the performance of the optical disc apparatus can be further improved.
本実施例では、位相誤差信号のゲインを自動調整する機能を備えた光ディスク装置について説明する。図18には、本実施例の機能を有する光ディスク装置の構成例を示す。位相誤差信号は、検出信号から再生信号成分を落としたものであるため、光源の発光パワーが一定であっても、記録部か未記録部か、あるいは変調の深さなどによって振幅が変動する。このため本実施例では信号光の一部を、信号光を生成するための光路上に配置された特殊偏光ビームスプリッタ1801(特殊偏光ビームスプリッタ105と同等のもの)で反射させることによって取り出し、集光レンズ1802を用いて検出器1803に導き、平均パワー信号Gを出力する。出力された平均パワー信号Gは、差動検出器128の後段に配置された除算回路1804に入力される。実施例1で説明したように、差動検出器128の出力D2は位相誤差信号に相当する。当該除算回路1804により、位相誤差信号を平均パワー信号で除算(規格化)する演算処理が実行される。これにより、光ディスクの状態によらない一定振幅の位相誤差信号を得ることができ、安定な位相サーボ駆動が可能となる。
In this embodiment, an optical disc apparatus having a function of automatically adjusting the gain of the phase error signal will be described. FIG. 18 shows a configuration example of an optical disc apparatus having the functions of this embodiment. Since the phase error signal is obtained by removing the reproduction signal component from the detection signal, even if the light emission power of the light source is constant, the amplitude varies depending on whether it is a recorded portion or an unrecorded portion, or the depth of modulation. For this reason, in this embodiment, a part of the signal light is extracted by being reflected by a special polarizing beam splitter 1801 (equivalent to the special polarizing beam splitter 105) arranged on the optical path for generating the signal light, and collected. An optical lens 1802 is used to guide the detector 1803 to output an average power signal G. The output average power signal G is input to a division circuit 1804 arranged at the subsequent stage of the differential detector 128. As described in the first embodiment, the output D2 of the differential detector 128 corresponds to a phase error signal. The division circuit 1804 executes arithmetic processing for dividing (normalizing) the phase error signal by the average power signal. As a result, a phase error signal having a constant amplitude independent of the state of the optical disk can be obtained, and stable phase servo driving can be performed.
図18では、平均パワー信号Gを取得するための光学的な分岐と検出器を新たに設けた構成例について説明したが、図19のように検出器111の出力信号を用いて取得してもよい。この場合、図2に示される受光部201,202,203,204の出力の総和A+B+C+D(但し、帯域制限により再生信号成分を落としたもの)が平均パワー信号Gとなる。従って、図19では、図2の構成に加えて、受光部201,202,203,204の出力の総和A+B+C+Dを算出するための論理回路素子を備えた四分割検出器が、平均パワー信号Gの取得手段として搭載される。
In FIG. 18, the configuration example in which the optical branch and the detector for obtaining the average power signal G are newly provided has been described. However, even if the output is obtained using the output signal of the detector 111 as shown in FIG. Good. In this case, the total output A + B + C + D of the light receiving units 201, 202, 203, 204 shown in FIG. 2 (however, the reproduction signal component is dropped due to band limitation) is the average power signal G. Accordingly, in FIG. 19, in addition to the configuration of FIG. 2, the quadrant detector provided with the logic circuit element for calculating the sum A + B + C + D of the outputs of the light receiving units 201, 202, 203, 204 is It is installed as an acquisition means.
以上、本実施例の構成により、実施例1から5に示す構成と比較して、安定な位相サーボ駆動が可能な光ディスク装置および光ヘッドが実現できる。
As described above, according to the configuration of the present embodiment, an optical disc apparatus and an optical head capable of stable phase servo drive can be realized as compared with the configurations shown in Embodiments 1 to 5.
本実施例は、実施例1において、光路長差固定位置微調整を、ピエゾ素子129と可動部114との組み合わせにより本調整を行う場合である。具体的には、図23のように位相ジャンプの繰り返しによりピエゾ素子のストローク範囲の端付近まで到達したときに、可動部を移動させる。すると、閉ループ制御を行っているために光路長差の変化を伴わずにピエゾ素子が(可動部と連動して)伸縮するため、更に位相ジャンプを行うことが可能となり、原理的には可動部のストローク範囲内で位相ジャンプを繰り返すことが可能となる。すなわち、ピエゾ素子129のストロークが短い場合でも十分な光路長差調整範囲を確保することができる。
This embodiment is a case where the optical path length difference fixed position fine adjustment in the first embodiment is performed by a combination of the piezo element 129 and the movable portion 114. Specifically, as shown in FIG. 23, the movable portion is moved when reaching the end of the stroke range of the piezo element by repeating the phase jump. Then, since closed-loop control is performed, the piezo element expands and contracts (in conjunction with the movable part) without changing the optical path length difference, so that it is possible to perform further phase jumps. It is possible to repeat the phase jump within the stroke range. That is, even when the stroke of the piezo element 129 is short, a sufficient optical path length difference adjustment range can be ensured.
ピエゾ素子は応答速度を十分に確保するため、伸縮方向の長さは短いほうが望ましいが、伸縮方向の長さはピエゾ素子のストロークに比例するため、応答速度とストロークがトレードオフの関係にある。従って本構成により、短いストロークを許容することでピエゾ素子の応答速度を確保し、当該光ディスク装置の再生速度の高速化に寄与することができる。また、ピエゾ素子を小型化する効果も有するため、光ディスク装置、特に光ヘッド部の小型化に寄与することができる。
In order to ensure a sufficient response speed, the piezoelectric element preferably has a shorter length in the expansion / contraction direction. However, since the length in the expansion / contraction direction is proportional to the stroke of the piezoelectric element, the response speed and the stroke are in a trade-off relationship. Therefore, with this configuration, it is possible to secure a response speed of the piezo element by allowing a short stroke, and to contribute to an increase in the reproduction speed of the optical disc apparatus. Moreover, since it has the effect of reducing the size of the piezo element, it can contribute to the downsizing of the optical disk device, particularly the optical head unit.
上記記載は実施例についてなされたが、本発明はそれに限らず、本発明の精神と添付の請求の範囲の範囲内で種々の変更および修正をすることができることは当業者に明らかである。
Although the above description has been made with reference to embodiments, the present invention is not limited thereto, and it will be apparent to those skilled in the art that various changes and modifications can be made within the spirit of the present invention and the scope of the appended claims.
本発明により、大容量多層高速光ディスクの再生信号が安定に、高品質で検出することが可能となり、大容量ビデオレコーダや、ハードディスクデータバックアップ装置、保存情報アーカイブ装置など、幅広い産業応用が期待できる。
The present invention makes it possible to detect a reproduction signal of a large-capacity multilayer high-speed optical disk stably and with high quality, and a wide range of industrial applications such as a large-capacity video recorder, a hard disk data backup device, and a storage information archive device can be expected.
2:再生信号処理ブロック、23:アドレス検出回路、24:復調回路、25:信号処理回路、26:復号回路、27:マイクロプロセッサ、28:レーザドライバ、29:メモリ、79:サーボ回路、76:自動位置制御手段、77:モータ、37:光スポット、99:上位装置、2001:光ヘッド、101:半導体レーザ、102:コリメートレンズ、103:λ/2板、104:偏光プリズム、105:特殊偏光ビームスプリッタ、106:λ/4板、107:2次元アクチュエータ、108:対物レンズ、109:光ディスク、110:集光レンズ、111:検出器、112:演算回路、113:集光レンズ、114:可動部、115:プリズムミラー、116:コーナーキューブプリズム、117:偏光補償素子、118:無偏光ハーフビームスプリッタ、119:λ/2板、120:偏光ビームスプリッタ、121,122:検出器、123:λ/4板、124:偏光ビームスプリッタ、125,126:検出器、127,128:差動回路、129:ピエゾ素子、130:ミラー、201,202,203,204:受光部、205:入射ビーム、501:3分割位相板、502:λ/4板、503:6分割波長板、504:垂直偏光方向、701,702:無偏光ビームスプリッタ、703,704,705:偏光子、706,707,708:検出器、709,710:位相板、711:演算回路、801:ミラー、802:集光レンズ、803:干渉素子、804:検出器、901:無偏光回折格子、902:異方性媒質、903:ウォラストンプリズム、905,906,908,909:受光部、907,910:差動回路1001,1002:くさび型プリズム,1003:アクチュエータ1301:アクチュエータ、1601:アクチュエータ、1801:特殊偏光ビームスプリッタ、1802:集光レンズ、1803:検出器、1804:除算回路2101:AD変換回路、2102:電圧制御発信機、2103:位相比較器、2104:ローパスフィルタ
2: reproduction signal processing block, 23: address detection circuit, 24: demodulation circuit, 25: signal processing circuit, 26: decoding circuit, 27: microprocessor, 28: laser driver, 29: memory, 79: servo circuit, 76: Automatic position control means, 77: motor, 37: light spot, 99: host device, 2001: optical head, 101: semiconductor laser, 102: collimating lens, 103: λ / 2 plate, 104: polarizing prism, 105: special polarization Beam splitter, 106: λ / 4 plate, 107: two-dimensional actuator, 108: objective lens, 109: optical disk, 110: condenser lens, 111: detector, 112: arithmetic circuit, 113: condenser lens, 114: movable 115: Prism mirror 116: Corner cube prism 117: Polarization compensator 118: Non-polarized light Half beam splitter, 119: λ / 2 plate, 120: polarization beam splitter, 121, 122: detector, 123: λ / 4 plate, 124: polarization beam splitter, 125, 126: detector, 127, 128: differential Circuit: 129: Piezo element, 130: Mirror, 201, 202, 203, 204: Light receiving unit, 205: Incident beam, 501: Three-division phase plate, 502: λ / 4 plate, 503: Six-division wavelength plate, 504: Vertical polarization direction, 701, 702: non-polarization beam splitter, 703, 704, 705: polarizer, 706, 707, 708: detector, 709, 710: phase plate, 711: arithmetic circuit, 801: mirror, 802: collection Optical lens, 803: interference element, 804: detector, 901: unpolarized diffraction grating, 902: anisotropic medium, 903: Wollaston prism, 90 , 906, 908, 909: light receiving unit, 907, 910: differential circuit 1001, 1002: wedge prism, 1003: actuator 1301: actuator, 1601: actuator, 1801: special polarization beam splitter, 1802: condenser lens, 1803 : Detector, 1804: division circuit 2101: AD converter circuit, 2102: voltage control transmitter, 2103: phase comparator, 2104: low-pass filter
Claims (18)
- 光源から出射された光束を分割し、
当該分割された光束の一方を光情報記録媒体に照射することにより得られる信号光と前記分割された光束の他方から得られる参照光とを光学的に干渉させることにより干渉光を形成し、
当該干渉光を複数の検出器に光学的な位相関係が互いに異なる状態で導き、
前記複数の検出器の出力から再生信号を取得する光学的情報再生方法であって、
前記光情報記録媒体の位置変動に伴う、前記信号光と前記参照光の光路長差の変動を打ち消す光路長差粗調整と、
前記光路長差粗調整後の光路長差の値を調整する光路長差固定位置調整と、
前記参照光と前記信号光との間の位相差を固定する光路長差微調整と、
を行うことを特徴とする光学的情報再生方法。 Split the light beam emitted from the light source,
Forming interference light by optically interfering the signal light obtained by irradiating the optical information recording medium with one of the divided light beams and the reference light obtained from the other of the divided light beams,
The interference light is guided to a plurality of detectors in a state where optical phase relationships are different from each other,
An optical information reproduction method for obtaining a reproduction signal from outputs of the plurality of detectors,
Optical path length difference rough adjustment for canceling the fluctuation of the optical path length difference between the signal light and the reference light accompanying the positional fluctuation of the optical information recording medium;
An optical path length difference fixed position adjustment for adjusting the optical path length difference value after the optical path length difference coarse adjustment;
Optical path length difference fine adjustment for fixing the phase difference between the reference light and the signal light;
An optical information reproducing method comprising: - 請求項1に記載の光学的情報再生方法において、
前記光路長差固定位置調整では、前記参照光と信号光の光路長差がゼロになるように前記参照光と信号光との光路長差が調整され、
前記光路長差微調整では、前記参照光と信号光の位相差が所定の閾値以下になるように前記光路差が調整されることを特徴とする光学的情報再生方法。 The optical information reproducing method according to claim 1,
In the optical path length difference fixed position adjustment, the optical path length difference between the reference light and the signal light is adjusted so that the optical path length difference between the reference light and the signal light becomes zero,
In the optical path length fine adjustment, the optical path difference is adjusted such that the phase difference between the reference light and the signal light is less than or equal to a predetermined threshold value. - 請求項1に記載の光学的情報再生方法において、
前記光路長固定位置調整、前記光路長差微調整および前記光路長差粗調整のいずれか2つの調整を同一の機構により行うことを特徴とする光学的情報再生方法。 The optical information reproducing method according to claim 1,
An optical information reproducing method characterized in that any two adjustments of the optical path length fixed position adjustment, the optical path length difference fine adjustment, and the optical path length difference coarse adjustment are performed by the same mechanism. - 請求項1に記載の光学的情報再生方法において、
前記光路長差粗調整と、前記光路長差固定位置調整と、前記光路長差微調整とを、同一の可動部により行うことを特徴とする光学的情報再生方法。 The optical information reproducing method according to claim 1,
An optical information reproducing method, wherein the optical path length difference coarse adjustment, the optical path length difference fixed position adjustment, and the optical path length difference fine adjustment are performed by the same movable part. - 請求項1に記載の光学的情報再生方法において、
前記光路長差微調整においては、
前記複数の検出器からの出力の一部または全部より出力から位相誤差信号を生成し、
当該位相誤差信号を光路長差変化手段に入力して閉ループ制御することにより実行されることを特徴とする光学的情報再生方法。 The optical information reproducing method according to claim 1,
In the optical path length difference fine adjustment,
A phase error signal is generated from an output from a part or all of the outputs from the plurality of detectors;
An optical information reproducing method, which is executed by inputting the phase error signal into an optical path length difference changing means and performing closed loop control. - 請求項5に記載の光学的情報再生方法において、
前記複数の検出器の個数は4つであり、
それぞれの検出器に入射される光の干渉位相が互いに90度の整数倍だけ異なり、
前記再生信号は入射する光の干渉位相が互いに180度異なる2つの検出器の差動信号であり、
前記位相誤差信号は残りの2つの検出器の間の差動信号であることを特徴とする光学的情報再生方法。 The optical information reproducing method according to claim 5, wherein
The number of the plurality of detectors is four,
The interference phase of light incident on each detector differs from each other by an integral multiple of 90 degrees,
The reproduction signal is a differential signal of two detectors in which the interference phase of incident light is different from each other by 180 degrees,
The optical information reproducing method, wherein the phase error signal is a differential signal between the remaining two detectors. - 請求項1に記載の光学的情報再生方法において、
前記光路長差の粗調整と、
前記光路長差固定位置調整と、
前記光路長差微調整をこの順番に行うことを特徴とする光学的情報再生方法。 The optical information reproducing method according to claim 1,
Coarse adjustment of the optical path length difference;
Adjusting the optical path length difference fixed position;
An optical information reproducing method comprising performing the optical path length difference fine adjustment in this order. - 請求項7に記載の光学的情報再生方法において、
前記光路長差微調整の直前、途中、直後の一部または全部に前記光路長差固定位置調整を行うことを特徴とする光学的情報再生方法。 The optical information reproducing method according to claim 7, wherein
An optical information reproducing method, wherein the optical path length difference fixed position adjustment is performed for a part or all of the optical path length difference fine adjustment immediately before, during, and immediately after the optical path length difference fine adjustment. - 請求項5に記載の光学的情報再生方法において、
位相ジャンプ信号を前記光路長差変化手段に入力し、前記閉ループ制御を行ったまま、前記光源の発光波長の整数倍だけ光路長差を可変調整することを特徴とする光学的情報再生方法。 The optical information reproducing method according to claim 5, wherein
An optical information reproducing method comprising: inputting a phase jump signal to the optical path length difference changing means, and variably adjusting the optical path length difference by an integral multiple of the emission wavelength of the light source while performing the closed loop control. - 光源から出射された光束を第1の光束および第2の光束に分割し、当該第1の光束を光情報記録媒体に照射することにより得られる信号光と、当該第2の光束から得られる参照光とを光学的に干渉させることにより干渉光を形成し、当該干渉光を複数の検出器に光学的な位相関係が互いに異なる状態で導く機能を備えた光学モジュールを備えた光ヘッドにおいて、
前記光学モジュールが、
前記光情報記録媒体の位置変動に伴う、前記信号光と前記参照光の光路長差の変動を打ち消す、光路長差の粗調整を行う第1の光路長差変化手段と、
前記光路長差の固定位置を調整する第2の光路長差変化手段と、
前記光路長差の微調整を行う第3の光路長差変化手段とを備えたことを特徴とする光ヘッド。 The light beam emitted from the light source is divided into the first light beam and the second light beam, and the signal light obtained by irradiating the optical information recording medium with the first light beam and the reference obtained from the second light beam In an optical head having an optical module having a function of forming interference light by optically interfering with light and guiding the interference light to a plurality of detectors in a state where optical phase relationships are different from each other,
The optical module is
First optical path length difference changing means for performing rough adjustment of the optical path length difference, which cancels out the fluctuation of the optical path length difference between the signal light and the reference light accompanying the positional fluctuation of the optical information recording medium;
Second optical path length difference changing means for adjusting a fixed position of the optical path length difference;
An optical head comprising: third optical path length difference changing means for finely adjusting the optical path length difference. - 請求項10に記載の光ヘッドにおいて、
前記第2の光路長差変化手段により、前記参照光と信号光の光路長差がゼロになるように前記参照光と信号光との光路長差が調整され、
前記第3の光路長差変化手段により、前記参照光と信号光の位相差が所定の閾値以下になるように前記光路差が調整されることを特徴とする光ヘッド。 The optical head according to claim 10,
The optical path length difference between the reference light and the signal light is adjusted by the second optical path length difference changing means so that the optical path length difference between the reference light and the signal light becomes zero,
The optical head is characterized in that the optical path difference is adjusted by the third optical path length difference changing means so that the phase difference between the reference light and the signal light is not more than a predetermined threshold value. - 請求項10に記載の光ヘッドにおいて、
前記第2の光路長差変化手段と、前記第3の光路長差変化手段とが同一の可動部により構成されることを特徴とする光ヘッド。 The optical head according to claim 10,
2. The optical head according to claim 1, wherein the second optical path length difference changing means and the third optical path length difference changing means are constituted by the same movable part. - 請求項10に記載の光ヘッドにおいて、
前記第1の光路長差変化手段と、前記第2の光路長差変化手段と、前記第3の光路長差変化手段とが同一の可動部により構成されることを特徴とする光ヘッド。 The optical head according to claim 10,
An optical head characterized in that the first optical path length difference changing means, the second optical path length difference changing means, and the third optical path length difference changing means are constituted by the same movable part. - 請求項10に記載の光ヘッドにおいて、
前記光学モジュールは、
前記第1の光束を前記光情報記録媒体に集光して照射し、当該光情報記録媒体から反射される反射光を受光する対物レンズと、
前記第2の光束の光路中に設けられ、前記第2の光束を参照光として反射させる参照光反射手段とを有し、
前記対物レンズと、前記参照光反射手段とが前記可動部に搭載されていることを特徴とする光ヘッド。 The optical head according to claim 10,
The optical module is
An objective lens that collects and irradiates the first light flux on the optical information recording medium and receives reflected light reflected from the optical information recording medium;
A reference light reflecting means provided in the optical path of the second light flux for reflecting the second light flux as reference light,
An optical head, wherein the objective lens and the reference light reflecting means are mounted on the movable part. - 請求項10に記載の光ヘッドにおいて、
前記複数の検出器の個数は4つであって、
それぞれの検出器に入射される光の干渉位相が互いに90度の整数倍だけ異なり、
前記再生信号は入射する光の干渉位相が互いに180度異なる2つの検出器の差動信号であり、
前記位相誤差信号は残りの2つの検出器の間の差動信号であることを特徴とする光ヘッド。 The optical head according to claim 10,
The number of the plurality of detectors is four,
The interference phase of light incident on each detector differs from each other by an integral multiple of 90 degrees,
The reproduction signal is a differential signal of two detectors in which the interference phase of incident light is different from each other by 180 degrees,
2. The optical head according to claim 1, wherein the phase error signal is a differential signal between the remaining two detectors. - 請求項15に記載の光ヘッドにおいて、
前記光学モジュールは、
無偏光光束分割素子と、
1つまたは複数の波長板と、
複数の偏光分離素子とを備えた干渉光学系を有し、
前記無偏光分割素子が光束を分割する比率が1対1でないことを特徴とする光ヘッド。 The optical head according to claim 15, wherein
The optical module is
A non-polarizing beam splitting element;
One or more wave plates;
An interference optical system including a plurality of polarization separation elements;
The optical head according to claim 1, wherein the non-polarization splitting element splits a light beam at a ratio not 1: 1. - 請求項10に記載の光ヘッドにおいて、
前記複数の検出器の出力から位置誤差信号を生成するための論理回路素子と、
前記光情報記録媒体からの戻り光の平均光量をモニタする総光量検出器と、
前記総光量検出器の出力値で前記位相誤差信号に対する規格化演算を実行する除算回路とを有することを特徴とする光ヘッド。 The optical head according to claim 10,
A logic circuit element for generating a position error signal from the outputs of the plurality of detectors;
A total light amount detector for monitoring the average light amount of the return light from the optical information recording medium;
An optical head comprising: a division circuit that performs a normalization operation on the phase error signal with an output value of the total light amount detector. - 請求項17に記載の光ヘッドにおいて、
前記総光量検出器は、焦点ずれ信号を生成する検出器であることを特徴とする光ヘッド。 The optical head according to claim 17,
The optical head according to claim 1, wherein the total light amount detector is a detector that generates a defocus signal.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009-060420 | 2009-03-13 | ||
| JP2009060420A JP5452040B2 (en) | 2009-03-13 | 2009-03-13 | Optical information reproducing method, optical head, and optical disc apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2010103962A1 true WO2010103962A1 (en) | 2010-09-16 |
Family
ID=42728252
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2010/053387 WO2010103962A1 (en) | 2009-03-13 | 2010-03-03 | Optical information reproduction method, optical head, and optical disc apparatus |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP5452040B2 (en) |
| WO (1) | WO2010103962A1 (en) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012027996A (en) * | 2010-07-28 | 2012-02-09 | Hitachi Consumer Electronics Co Ltd | Optical information recording/reproducing device and reproducing device |
| JP2012069189A (en) * | 2010-09-22 | 2012-04-05 | Sony Corp | Reproducing device, and optical path length servo control method |
| JP2012174290A (en) * | 2011-02-17 | 2012-09-10 | Hitachi Media Electoronics Co Ltd | Optical pickup and optical disk unit |
| WO2014188532A1 (en) * | 2013-05-22 | 2014-11-27 | 日立コンシューマエレクトロニクス株式会社 | Optical information reproduction device |
| WO2016120924A1 (en) * | 2015-01-30 | 2016-08-04 | ソニー株式会社 | Reproduction device and reproduction method |
| CN109089113A (en) * | 2018-10-12 | 2018-12-25 | 四川长虹电器股份有限公司 | A kind of method of the automatic carry out reproduction ratio adjustment of flat panel TV |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5309008B2 (en) | 2009-12-15 | 2013-10-09 | 日立コンシューマエレクトロニクス株式会社 | Optical information recording / reproducing apparatus and optical information reproducing apparatus |
| JP5409479B2 (en) | 2010-03-29 | 2014-02-05 | 日立コンシューマエレクトロニクス株式会社 | Optical information reproducing apparatus, optical information recording apparatus, and information recording method |
| JP5758728B2 (en) | 2011-07-26 | 2015-08-05 | 株式会社日立ハイテクノロジーズ | Charged particle beam equipment |
| JP2013033572A (en) * | 2011-08-03 | 2013-02-14 | Sony Corp | Optical pickup device and reproducing device |
| JP7017985B2 (en) | 2018-06-05 | 2022-02-09 | 株式会社日立製作所 | How to determine the system and processing conditions |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007317284A (en) * | 2006-05-25 | 2007-12-06 | Hitachi Ltd | Optical disk device |
| JP2008065961A (en) * | 2006-09-11 | 2008-03-21 | Hitachi Ltd | Optical information-detecting method, optical head, and optical disk device |
| JP2008243273A (en) * | 2007-03-27 | 2008-10-09 | Hitachi Ltd | Optical head and method for reproducing optical information recording medium |
| JP2008269680A (en) * | 2007-04-18 | 2008-11-06 | Hitachi Ltd | Optical head and optical disk device |
| JP2008310942A (en) * | 2007-02-23 | 2008-12-25 | Hitachi Ltd | Optical head and optical disk device |
| JP2009252337A (en) * | 2008-04-11 | 2009-10-29 | Hitachi Ltd | Optical head and optical disk device |
-
2009
- 2009-03-13 JP JP2009060420A patent/JP5452040B2/en not_active Expired - Fee Related
-
2010
- 2010-03-03 WO PCT/JP2010/053387 patent/WO2010103962A1/en active Application Filing
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007317284A (en) * | 2006-05-25 | 2007-12-06 | Hitachi Ltd | Optical disk device |
| JP2008065961A (en) * | 2006-09-11 | 2008-03-21 | Hitachi Ltd | Optical information-detecting method, optical head, and optical disk device |
| JP2008310942A (en) * | 2007-02-23 | 2008-12-25 | Hitachi Ltd | Optical head and optical disk device |
| JP2008243273A (en) * | 2007-03-27 | 2008-10-09 | Hitachi Ltd | Optical head and method for reproducing optical information recording medium |
| JP2008269680A (en) * | 2007-04-18 | 2008-11-06 | Hitachi Ltd | Optical head and optical disk device |
| JP2009252337A (en) * | 2008-04-11 | 2009-10-29 | Hitachi Ltd | Optical head and optical disk device |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012027996A (en) * | 2010-07-28 | 2012-02-09 | Hitachi Consumer Electronics Co Ltd | Optical information recording/reproducing device and reproducing device |
| JP2012069189A (en) * | 2010-09-22 | 2012-04-05 | Sony Corp | Reproducing device, and optical path length servo control method |
| JP2012174290A (en) * | 2011-02-17 | 2012-09-10 | Hitachi Media Electoronics Co Ltd | Optical pickup and optical disk unit |
| WO2014188532A1 (en) * | 2013-05-22 | 2014-11-27 | 日立コンシューマエレクトロニクス株式会社 | Optical information reproduction device |
| WO2016120924A1 (en) * | 2015-01-30 | 2016-08-04 | ソニー株式会社 | Reproduction device and reproduction method |
| JPWO2016120924A1 (en) * | 2015-01-30 | 2017-11-09 | ソニー株式会社 | Playback apparatus and playback method |
| US9916856B2 (en) | 2015-01-30 | 2018-03-13 | Sony Corporation | Playing apparatus and playing method |
| CN109089113A (en) * | 2018-10-12 | 2018-12-25 | 四川长虹电器股份有限公司 | A kind of method of the automatic carry out reproduction ratio adjustment of flat panel TV |
| CN109089113B (en) * | 2018-10-12 | 2019-09-10 | 四川长虹电器股份有限公司 | A kind of method of the automatic carry out reproduction ratio adjustment of flat panel TV |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010218591A (en) | 2010-09-30 |
| JP5452040B2 (en) | 2014-03-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5452040B2 (en) | Optical information reproducing method, optical head, and optical disc apparatus | |
| JP5153424B2 (en) | Optical head and optical disk apparatus | |
| JP5081763B2 (en) | Optical information detection method, optical pickup, and optical information recording / reproducing apparatus | |
| JP4861948B2 (en) | Optical head and optical disk apparatus | |
| JP4564948B2 (en) | Optical information detection method, optical head, and optical disc apparatus | |
| KR100841836B1 (en) | Optical disk device | |
| JP2008269680A (en) | Optical head and optical disk device | |
| US20120188618A1 (en) | Optical information reproducing method and optical information reproducing apparatus | |
| JP5043049B2 (en) | Optical information reproducing method and optical disc apparatus | |
| JP2007193894A (en) | Optical recording/reproducing device, optical pickup, and tracking error signal detection method | |
| US7764576B2 (en) | Optical information recording and reproducing apparatus | |
| JP2008243273A (en) | Optical head and method for reproducing optical information recording medium | |
| US20120008483A1 (en) | Optical head and optical disc apparatus | |
| JP2006323897A (en) | Optical reproducing method, waveform equalizing method, and optical recording/reproducing device | |
| JP6158339B2 (en) | Hologram reproducing apparatus and hologram reproducing method | |
| JP5780932B2 (en) | Optical information recording / reproducing apparatus, optical information recording apparatus | |
| JP2007323791A (en) | Optical information recording and reproducing apparatus | |
| JP5468033B2 (en) | Optical information reproducing apparatus and optical information recording / reproducing apparatus | |
| US20070297731A1 (en) | Optical pick-up | |
| JP2007250034A (en) | Position adjustment method for optical pickup photodetector | |
| US20110002117A1 (en) | Optical disc drive | |
| JP5778624B2 (en) | Optical information reproducing apparatus and optical information reproducing method | |
| WO2013183439A1 (en) | Optical pickup device | |
| US20170236543A1 (en) | Optical information recording/reproducing device and holographic recording/reproducing method | |
| JP2008305493A (en) | Optical information recording/playback apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 10750716 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 10750716 Country of ref document: EP Kind code of ref document: A1 |