明 細 書
データ圧縮伸張方法、プログラム及び装置
技術分野
[0001] 本発明は、画像データや音声データ等の種々の情報を含むデータの圧縮'伸張処 理等に用いられるデータ圧縮装置、データ伸張装置等の電子機器、これらのデータ 圧縮装置及びデータ伸張装置の少なくとも一方を含む電子機器やシステム、更には 、これらの電子機器やシステムを用いたデータ圧縮方法、データ伸張方法、及びこれ らの電子機器やシステムを制御するためのデータ圧縮プログラム及びデータ伸張プ ログラムに関する。
背景技術
[0002] 静止画像を圧縮する画像圧縮技術の国際標準として JPEG (Joint Photographic Ex pert Group)がある。 JPEGアルゴリズムは、大きく 2つの圧縮方式に分けられる。第 1 の方式は離散コサイン変換(DCT: Discrete Cosine Transform)を基本とした方式で あり、第 2の方式は 2次元空間で差動 PCM (DPCM : Differential PCM)を行う空間関 数 (Spatial)方式である。
[0003] DCT方式は量子化を含むため一般には完全に元の画像は再現されな 、非可逆 符号ィ匕であるが、少ないビット数においても十分な復号画像品質を得ることができ、 本アルゴリズムの基本となる方式である。一方、空間関数方式は、圧縮率は小さいが 元の画像を完全に再現する可逆符号ィヒであり、この特性を実現するために標準方式 として付加された方式である。 DCT方式は更に必須機能であるベースライン ·プロセ ス(Baseline System)とオプション機能である拡張 DCTプロセス(Extended System)の 2つに分類される。ベースライン'プロセスは、 DCT方式を実現するすべての符号器 Z復号器が持たなければならない最小限の機能で、適応型離散コサイン変換 (AD CT: Adaptive Discrete Cosine Transform Coding)方式を基礎としたアルゴリズムであ る。ベースライン'プロセスにおける画像圧縮では画像データを 8 X 8ピクセル単位の ブロックで処理をする。
[0004] この様に、現在,多くの標準的なデジタル画像の圧縮形式は,ブロック単位の DCT
に基づいている。これらの方法はコサイン級数近似を基礎とするため,圧縮効率は本 質的に DCT係数の収束速度に依存する。一般に, DCT係数の収束が緩慢な場合 に圧縮効率は悪くなる。又,低符号ィ匕レート(ビットレート)時には DCT係数の量子化 誤差が大きくなり,ブロック歪など,再構成画像の劣化現象が無視出来なくなる。 発明の開示
[0005] 本発明は,従来の装置構成に対して簡単な構成を付加するだけで,ブロック単位 の DCTに基づくデジタル画像圧縮形式における圧縮効率の向上,及びブロック歪の 除去を実現することが可能な電子機器、データ圧縮方法、データ伸張方法、データ 圧縮プログラム及びデータ伸張プログラムを提供することを目的とする。
本発明の第 1の態様は、入力情報を、複数のブロック領域に等分割して、入力情報 のデータを圧縮するデータ圧縮方法に関する。即ち、第 1の態様に係るデータ圧縮 方法は、(a)複数のブロック領域中の対象ブロック領域と、この対象ブロック領域に隣 接するブロック領域におけるそれぞれの入力信号の DCT係数を計算するステップ;( b)入力信号の DCT係数から、対象ブロック領域と、隣接するブロック領域とのブロッ ク境界において、入力信号のブロック境界における傾きを相殺する傾き相殺関数の DCT係数を計算するステップ;(c)入力信号の DCT係数と、傾き相殺関数の DCT 係数の残差を計算するステップ; (d)残差の量子化及び符号化を行!ヽ圧縮データを 得るステップとを含むデータ圧縮方法であることを要旨とする。
[0006] 本発明の第 2の態様は、入力情報が複数のブロック領域に等分割され、ブロック領 域毎に入力情報のデータが圧縮された圧縮データを伸張し、入力情報を復元する データ伸張方法に関する。即ち、第 2の態様に係るデータ伸張方法は、(a)圧縮デ ータに対し逆符号化及び逆量子化を行 ヽ、逆量子化された DCT係数をブロック領 域毎に得るステップ;(b)対象ブロック領域と、この対象ブロック領域に隣接するブロッ ク領域とのブロック境界にぉ 、て、対象ブロック領域における入力信号の傾きを相殺 する傾き相殺関数の DCT係数を、逆量子化された DCT係数カゝら計算するステップ; (c)逆量子化された DCT係数に傾き相殺関数の DCT係数をカ卩え、入力信号の DC T係数を近似的に復元するステップ; (d)近似的に復元された入力信号の DCT係数 から、入力信号をブロック領域毎に得るステップ;(e)ブロック領域毎の入力信号を互
いに貼り合わせ、入力情報を復元するステップとを含むデータ伸張方法であることを 要旨とする。
[0007] 本発明の第 3の態様は、入力情報が複数のブロック領域に等分割され、ブロック領 域毎に入力情報のデータが圧縮された圧縮データを伸張し、入力情報を推定する データ伸張方法に関する。即ち、第 3の態様に係るデータ伸張方法は、(a)圧縮デ ータに対し逆符号化及び逆量子化を行 ヽ、逆量子化された DCT係数をブロック領 域毎に得るステップ;(b)対象ブロック領域と、この対象ブロック領域に隣接するブロッ ク領域とのブロック境界にぉ 、て、対象ブロック領域における入力信号の傾きを相殺 する傾き相殺関数の DCT係数を、逆量子化された DCT係数カゝら計算するステップ; (c)傾き相殺関数の DCT係数力 量子化誤差を計算するステップ;(d)この量子化 誤差を用いて、逆量子化された DCT係数を補正し、入力信号の DCT係数を近似的 に推定するステップ;(e)近似的に推定された入力信号の DCT係数から、入力信号 をブロック領域毎に得るステップ;(f)ブロック領域毎の入力信号を互いに貼り合わせ
、入力情報を推定するステップとを含むデータ伸張方法であることを要旨とする。
[0008] 本発明の第 4の態様は、入力情報が複数のブロック領域に等分割され、ブロック領 域毎に入力情報のデータが圧縮された圧縮データを伸張し、入力情報を推定する データ伸張方法に関する。即ち、第 4の態様に係るデータ伸張方法は、(a)圧縮デ ータに対し逆符号化及び逆量子化を行 ヽ、逆量子化された DCT係数をブロック領 域毎に得るステップ;(b)対象ブロック領域と、この対象ブロック領域に隣接するブロッ ク領域とのブロック境界にぉ 、て、対象ブロック領域における入力信号の傾きを相殺 する傾き相殺関数の DCT係数を、逆量子化された DCT係数カゝら計算するステップ; (c)傾き相殺関数の DCT係数力 量子化誤差を計算するステップ;(d)ブロック歪み を軽減する 2次曲面を隣接するブロック領域に加え、 2次曲面の DCT係数を計算す るステップ;(e)量子化誤差と 2次曲面の DCT係数を用いて、逆量子化された DCT 係数を補正し、入力信号の DCT係数を近似的に推定するステップ;(f)近似的に推 定された入力信号の DCT係数から、入力信号をブロック領域毎に得るステップ;(g) ブロック領域毎の入力信号を互いに貼り合わせ、入力情報を推定するステップとを含 むデータ伸張方法であることを要旨とする。
本発明の第 5の態様は、入力情報を、複数のブロック領域に等分割して、入力情報 のデータを圧縮する電子機器に関する。即ち、第 5の態様に係る電子機器は、(a)複 数のブロック領域中の対象ブロック領域と、この対象ブロック領域に隣接するブロック 領域におけるそれぞれの入力信号の DCT係数を計算する入力信号の DCT係数計 算モジュール;(b)入力信号の DCT係数から、対象ブロック領域と、隣接するブロック 領域とのブロック境界にぉ 、て、入力信号のブロック境界における傾きを相殺する傾 き相殺関数の DCT係数を計算する相殺関数 DCT係数計算モジュール;(c)入力信 号の DCT係数と、傾き相殺関数の DCT係数の残差を計算する残差計算モジュール ; (d)残差の量子化を行い圧縮データを得る量子化回路;(e)圧縮データを符号化す る符号ィ匕回路とを備える電子機器であることを要旨とする。
本発明の第 6の態様は、入力情報が複数のブロック領域に等分割され、ブロック領 域毎に入力情報のデータが圧縮された圧縮データを伸張し、入力情報を復元する 電子機器に関する。即ち、第 5の態様に係る電子機器は、(a)圧縮データを逆符号 化する逆符号ィ匕回路;(b)逆符号化された圧縮データを逆量子化し、逆量子化され た DCT係数をブロック領域毎に得る逆量子化回路;(c)逆量子化された DCT係数を 、対象ブロック領域と、この対象ブロック領域に隣接するブロック領域に入力する DC T係数入力モジュール;(d)対象ブロック領域と、この対象ブロック領域に隣接するブ ロック領域とのブロック境界〖こお 、て、対象ブロック領域における入力信号の傾きを 相殺する傾き相殺関数の DCT係数を、逆量子化された DCT係数から計算する相殺 関数 DCT係数計算モジュール;(e)逆量子化された DCT係数に傾き相殺関数の D CT係数を加え、入力信号の DCT係数を近似的に復元する入力信号の DCT係数 近似'復元モジュール;(f)近似的に復元された入力信号の DCT係数から、入力信 号をブロック領域毎に得て、ブロック領域毎に入力信号を互いに貼り合わせ、入力情 報を復元するブロック貼り合わせ回路とを備える電子機器であることを要旨とする。 本発明の第 7の態様は、入力情報が複数のブロック領域に等分割され、ブロック領 域毎に入力情報のデータが圧縮された圧縮データを伸張し、入力情報を推定する 電子機器に関する。即ち、第 5の態様に係る電子機器は、(a)圧縮データを逆符号 化する逆符号ィ匕回路;(b)逆符号化された圧縮データを逆量子化し、逆量子化され
た DCT係数をブロック領域毎に得る逆量子化回路;(c)逆量子化された DCT係数を 、対象ブロック領域と、この対象ブロック領域に隣接するブロック領域に入力する DC T係数入力モジュール;(d)対象ブロック領域と、この対象ブロック領域に隣接するブ ロック領域とのブロック境界〖こお 、て、対象ブロック領域における入力信号の傾きを 相殺する傾き相殺関数の DCT係数を、逆量子化された DCT係数から計算する相殺 関数 DCT係数計算モジュール;(e)傾き相殺関数の DCT係数力 量子化誤差を計 算する量子化誤差計算モジュール;(f)この量子化誤差を用いて、逆量子化された D CT係数を補正し、入力信号の DCT係数を近似的に推定する量子化誤差補正モジ ユール;(g)近似的に推定された入力信号の DCT係数から、入力信号をブロック領 域毎に得て、ブロック領域毎に入力信号を互いに貼り合わせ、入力情報を推定する ブロック貼り合わせ回路とを備える電子機器であることを要旨とする。
本発明の第 8の態様は、入力情報が複数のブロック領域に等分割され、ブロック領 域毎に入力情報のデータが圧縮された圧縮データを伸張し、入力情報を推定する 電子機器に関する。即ち、第 5の態様に係る電子機器は、(a)圧縮データを逆符号 化する逆符号ィ匕回路;(b)逆符号化された圧縮データを逆量子化し、逆量子化され た DCT係数をブロック領域毎に得る逆量子化回路;(c)逆量子化された DCT係数を 、対象ブロック領域と、この対象ブロック領域に隣接するブロック領域に入力する DC T係数入力モジュール;(d)対象ブロック領域と、この対象ブロック領域に隣接するブ ロック領域とのブロック境界〖こお 、て、対象ブロック領域における入力信号の傾きを 相殺する傾き相殺関数の DCT係数を、逆量子化された DCT係数から計算する相殺 関数 DCT係数計算モジュール;(e)傾き相殺関数の DCT係数力 量子化誤差を計 算する量子化誤差計算モジュール;(f)ブロック歪みを軽減する 2次曲面を隣接する ブロック領域にカ卩え、 2次曲面の DCT係数を計算する 2次曲面 DCT係数計算モジュ ール;(g)量子化誤差と 2次曲面の DCT係数を用いて、逆量子化された DCT係数を 補正し、入力信号の DCT係数を近似的に推定する 2次曲面量子化誤差補正モジュ ール;(h)近似的に推定された入力信号の DCT係数から、入力信号をブロック領域 毎に得るモジュール;(i)近似的に推定された入力信号の DCT係数から、入力信号 をブロック領域毎に得て、ブロック領域毎に入力信号を互いに貼り合わせ、入力情報
を推定するブロック貼り合わせ回路とを備える電子機器であることを要旨とする。
[0011] 本発明の第 9の態様は、(a)入力情報を記憶する第 1の記憶装置;(b)この第 1の記 憶装置から読み出した入力情報を、複数のブロック領域に等分割するブロック分割 回路;(c)複数のブロック領域中の対象ブロック領域と、この対象ブロック領域に隣接 するブロック領域におけるそれぞれの入力信号の DCT係数を計算する入力信号の DCT係数計算モジュール;(d)入力信号の DCT係数から、対象ブロック領域と、隣 接するブロック領域とのブロック境界にぉ 、て、入力信号のブロック境界における傾き を相殺する傾き相殺関数の DCT係数を計算する相殺関数 DCT係数計算モジユー ル;(e)入力信号の DCT係数と、傾き相殺関数の DCT係数の残差を計算する残差 計算モジュール;(f)残差の量子化を行い圧縮データを得る量子化回路;(g)圧縮デ ータを符号ィ匕する符号ィ匕回路;(h)符号化された圧縮データを格納する第 2の記憶 装置;(i)この第 2の記憶装置から読み出した圧縮データを逆符号化する逆符号化回 路; G)逆符号化された圧縮データを逆量子化し、逆量子化された DCT係数をブロッ ク領域毎に得る逆量子化回路;(k)逆量子化された DCT係数を、対象ブロック領域と 、この対象ブロック領域に隣接するブロック領域に入力する DCT係数入力モジユー ル;(1)対象ブロック領域と、この対象ブロック領域に隣接するブロック領域とのブロッ ク境界にぉ 、て、対象ブロック領域における入力信号の傾きを相殺する傾き相殺関 数の DCT係数を、逆量子化された DCT係数から計算する相殺関数 DCT係数計算 モジュール;(m)逆量子化された DCT係数に傾き相殺関数の DCT係数をカ卩え、入 力信号の DCT係数を近似的に復元する入力信号の DCT係数近似 ·復元モジユー ル;(n)近似的に復元された入力信号の DCT係数から、入力信号をブロック領域毎 に得て、ブロック領域毎に入力信号を互いに貼り合わせ、入力情報を復元するブロッ ク貼り合わせ回路とを備える電子機器であることを要旨とする。
[0012] 本発明の第 10の態様は、入力情報を、複数のブロック領域に等分割して、入力情 報のデータを圧縮するエンコーダに、(a)複数のブロック領域中の対象ブロック領域 と、この対象ブロック領域に隣接するブロック領域におけるそれぞれの入力信号の D CT係数を計算する命令;(b)入力信号の DCT係数から、対象ブロック領域と、隣接 するブロック領域とのブロック境界において、入力信号のブロック境界における傾きを
相殺する傾き相殺関数の DCT係数を計算する命令;(c)入力信号の DCT係数と、 傾き相殺関数の DCT係数の残差を計算する命令; (d)残差の量子化及び符号化を 行い圧縮データを得る命令とを含む一連の命令を実行させるためのデータ圧縮プロ グラムであることを要旨とする。
[0013] 本発明の第 11の態様は、入力情報が複数のブロック領域に等分割され、ブロック 領域毎に入力情報のデータが圧縮された圧縮データを伸張し、入力情報を復元す るデコーダに、(a)圧縮データに対し逆符号ィ匕及び逆量子化を行い、逆量子化され た DCT係数をブロック領域毎に得る命令;(b)対象ブロック領域と、この対象ブロック 領域に隣接するブロック領域とのブロック境界にぉ 、て、対象ブロック領域における 入力信号の傾きを相殺する傾き相殺関数の DCT係数を、逆量子化された DCT係数 から計算する命令;(c)逆量子化された DCT係数に傾き相殺関数の DCT係数をカロ え、入力信号の DCT係数を近似的に復元する命令;(d)近似的に復元された入力 信号の DCT係数から、入力信号をブロック領域毎に得る命令;(e)ブロック領域毎の 入力信号を互いに貼り合わせ、入力情報を復元する命令とを含む一連の命令を実 行させるためのデータ伸張プログラムであることを要旨とする。
[0014] 本発明の第 12の態様は、入力情報が複数のブロック領域に等分割され、ブロック 領域毎に入力情報のデータが圧縮された圧縮データを伸張し、入力情報を推定す るデコーダに、(a)圧縮データに対し逆符号ィ匕及び逆量子化を行い、逆量子化され た DCT係数をブロック領域毎に得る命令;(b)対象ブロック領域と、この対象ブロック 領域に隣接するブロック領域とのブロック境界にぉ 、て、対象ブロック領域における 入力信号の傾きを相殺する傾き相殺関数の DCT係数を、逆量子化された DCT係数 から計算する命令;(c)傾き相殺関数の DCT係数から量子化誤差を計算する命令; ( d)この量子化誤差を用いて、逆量子化された DCT係数を補正し、入力信号の DCT 係数を近似的に推定する命令;(e)近似的に推定された入力信号の DCT係数から、 入力信号をブロック領域毎に得る命令;(f)ブロック領域毎の入力信号を互いに貼り 合わせ、入力情報を推定する命令とを含む一連の命令を実行させるためのデータ伸 張プログラムであることを要旨とする。
[0015] 本発明の第 13の態様は、入力情報が複数のブロック領域に等分割され、ブロック
領域毎に入力情報のデータが圧縮された圧縮データを伸張し、入力情報を推定す るデコーダに、(a)圧縮データに対し逆符号ィ匕及び逆量子化を行い、逆量子化され た DCT係数をブロック領域毎に得る命令;(b)対象ブロック領域と、この対象ブロック 領域に隣接するブロック領域とのブロック境界にぉ 、て、対象ブロック領域における 入力信号の傾きを相殺する傾き相殺関数の DCT係数を、逆量子化された DCT係数 から計算する命令;(c)傾き相殺関数の DCT係数から量子化誤差を計算する命令; ( d)ブロック歪みを軽減する 2次曲面を隣接するブロック領域に加え、 2次曲面の DCT 係数を計算する命令;(e)量子化誤差と 2次曲面の DCT係数を用いて、逆量子化さ れた DCT係数を補正し、入力信号の DCT係数を近似的に推定する命令;(f)近似 的に推定された入力信号の DCT係数から、入力信号をブロック領域毎に得る命令;
(g)ブロック領域毎の入力信号を互いに貼り合わせ、入力情報を推定する命令とを含 む一連の命令を実行させるためのデータ伸張プログラムであることを要旨とする。 図面の簡単な説明
[図 1]図 1は、本発明の第 1の実施の形態に係るデータ圧縮 ·伸張システムの概略を 説明するブロック図である。
[図 2]図 2は、本発明の第 1の実施の形態に係るデータ圧縮'伸張システムの PHLC T回路の論理的構成を説明するブロック図である。
[図 3]図 3は、本発明の第 1〜第 3の実施の形態に係るデータ圧縮'伸張システムに お!、て、ブロック分割回路が 1画面の画像データを 1ブロック単位に分割した状態を 模式的に説明する図である。
[図 4]図 4は、図 3に示した 1ブロック単位が 8 X 8 (より一般的には N X N)画素(ピクセ ル)からなることを説明する図である。
[図 5]図 5 (a)は、本発明の第 1の実施の形態に係るデータ圧縮 ·伸張システムの数学 的基礎として、本来離散的な多値情報である入力信号を、説明の都合上、連続的な 入力信号関数 f(x)として模式的に示す図である。図 5 (b)は、本発明の第 1の実施の 形態に係るデータ圧縮 ·伸張システムの数学的基礎として、入力信号関数 f(x)の傾き を相殺する「傾き相殺関数」 u(x)を模式的に示す図である。図 5 (c)は、残差 v(x)=f(x )—u(x)が、破線で示した 2次元ブロック領域 Ωの X方向の境界において、その傾き(1
次導関数)がゼロになることを模式的に示す図である。図 5 (d)は、残差 v(x)=f(x)— u (X)の傾きが、破線で示した 2次元ブロック領域 Ωの X方向の境界においてゼロになる ことにより、隣接する 2次元ブロック領域 Ωにおいて、残差 V(x)=f(X)—u(x)が、連続 することを模式的に示す図である。
[図 6]図 6 (a)は、図 3に示した 8 X 8画素力 なる 2次元ブロック領域 Ωの内の、第 1行 及び第 1列の成分となる画素を右上がりの斜線のハッチングで示した図である。図 6 ( b)は、図 3に示した 8 X 8画素力もなる 2次元ブロック領域 Ωの内の、 k -k >0成分と
1 2 なる画素を右上がりの斜線のハッチングで示した図である。
[図 7]図 7は、互いに隣接する 2次元ブロック領域 及び Ω13において、それぞれの入 力信号関数 fa及び fbに対し、座標 Xに沿った方向での傾き相殺関数 u(x)を探索する 様子を示す模式図である。
[図 8]図 8は、本発明の第 1の実施の形態に係るデータ圧縮 ·伸張システムにおける P HLCT回路を用いたデータ圧縮方法を説明するためのフローチャートである。
[図 9]図 9 (a)〜(f)は、図 8のフローチャートに対応して、本発明の第 1の実施の形態 に係るデータ圧縮方法を、 5つのデータブロックでより具体的に説明する模式図であ る。
[図 10]図 10は、本発明の第 1の実施の形態に係るデータ圧縮'伸張システムの逆 P
HLCT(IPHLCT)回路の論理的構成を説明するブロック図である。
[図 11]図 11は、本発明の第 1の実施の形態に係るデータ圧縮'伸張システムにおけ る IPHLCT回路を用いたデータ伸張方法を説明するためのフローチャートである。
[図 12]図 12 (a)〜(e)は、図 11のフローチャートに対応して、本発明の第 1の実施の 形態に係るデータ伸張方法を、 5つのデータブロックでより具体的に説明する模式図 である。
[図 13]図 13は、本発明の第 2の実施の形態に係るデータ圧縮'伸張システムの概略 を説明するブロック図である。
[図 14]図 14は、本発明の第 2の実施の形態に係るデータ圧縮'伸張システムの部分 モード PHLCT(PPHLCT)回路の論理的構成を説明するブロック図である。
[図 15]図 15は、本発明の第 2の実施の形態に係るデータ圧縮'伸張システムにおけ
る PPHLCT回路を用いたデータ伸張方法を説明するためのフローチャートである。
[図 16]図 16 (a)〜(d)は、図 15のフローチャートに対応して、本発明の第 2の実施の 形態に係るデータ伸張方法を、 5つのデータブロックでより具体的に説明する模式図 である。
[図 17]図 17は、本発明の第 2の実施の形態の変形例に係るデータ圧縮 ·伸張システ ムの部分モード PHLCT(PPHLCT)回路の論理的構成を説明するブロック図である
[図 18]図 18は、本発明の第 2の実施の形態の変形例に係るデータ圧縮 ·伸張システ ムにおける PPHLCT回路を用いたデータ伸張方法を説明するためのフローチャート である。
[図 19]図 19 (a)〜(f)は、図 18のフローチャートに対応して、本発明の第 2の実施の 形態の変形例に係るデータ伸張方法を、 5つのデータブロックでより具体的に説明す る模式図である。
圆 20]図 20 (a)は、データ圧縮'伸張システムの性能を視覚的に評価する場合に標 準的に用いられる試験用原画像レナ (Lenna)を示す図である。図 20 (b)は、データ圧 縮'伸張システムの性能を視覚的に評価する場合に標準的に用いられる試験用原画 像バーバラ (Barbara)を示す図である。
圆 21]図 21 (a)は,横軸に符号ィ匕レート (ビットレート),縦軸に原画像レナを用いた 場合の MSSIMの値を、第 1の実施の形態 (PHLCT)及び第 2の実施の形態の変形 例(PPHLCT)につ 、て、従来技術 (DCT)の場合の性能と比較して示す図である。 図 21 (b)は,横軸に符号ィ匕レート,縦軸に原画像レナを用いた場合の PSNRの値を 、第 1の実施の形態 (PHLCT)及び第 2の実施の形態の変形例(PPHLCT)につ 、 て、従来技術 (DCT)の場合の性能と比較して示す図である。
圆 22]図 22 (a)は,横軸に符号ィ匕レート (ビットレート),縦軸に原画像バーバラを用 いた場合の MSSIMの値を、第 1の実施の形態(PHLCT)及び第 2の実施の形態の 変形例(PPHLCT)につ 、て、従来技術 (DCT)の場合の性能と比較して示す図で ある。図 22 (b)は,横軸に符号ィ匕レート,縦軸に原画像バーバラを用いた場合の PS NRの値を、第 1の実施の形態 (PHLCT)及び第 2の実施の形態の変形例(PPHLC
T)につ 、て、従来技術 (DCT)の場合の性能と比較して示す図である。
[図 23]図 23 (a)は,原画像レナの場合において、横軸に PSNR,縦軸に DCT(JPE G標準方式)に対する符号化レート (圧縮レート)の削減率をとり,第 1の実施の形態( PHLCT)及び第 2の実施の形態の変形例(PPHLCT)につ 、て、従来技術 (DCT) の場合の性能と比較して示す図である。図 23 (b)は,原画像バーバラの場合におい て、横軸に PSNR,縦軸に DCTCFPEG標準方式)に対する符号化レート (圧縮レー ト)の削減率をとり,第 1の実施の形態 (PHLCT)及び第 2の実施の形態の変形例 (P PHLCT)につ 、て、従来技術 (DCT)の場合の性能と比較して示す図である。
[図 24]図 24は、符号ィ匕レート (圧縮レート) 0. 15bppにおける再構成画像の例を示 す。図 24 (a)は、原画像レナの場合において、従来技術に係る JPEG標準方式の D CTを適用した場合の再構成画像、図 24 (b)は、原画像レナの場合において、第 2の 実施の形態の変形例 (PPHLCT)を適用した場合の再構成画像、図 24 (c)は、原画 像レナの場合にぉ ヽて、第 1の実施の形態 (PHLCT)を適用した場合の再構成画像 、図 24 (d)は、原画像バーバラの場合において、通常の DCTCFPEG標準方式)を適 用した場合の再構成画像、図 24 (e)は、原画像バーバラの場合において、第 2の実 施の形態の変形例 (PPHLCT)を適用した場合の再構成画像、図 24 (f)は、原画像 バーバラの場合において、第 1の実施の形態 (PHLCT)を適用した場合の再構成画 像を示す図である。
[図 25]図 25は、符号ィ匕レート (圧縮レート) 0. 3bppにおける再構成画像の例を示す 。図 25 (a)は、原画像レナの場合において、従来技術に係る JPEG標準方式の DCT を適用した場合の PSNR= 32. 22dBにおける再構成画像、図 25 (b)は、原画像レ ナの場合にお 1、て、第 2の実施の形態の変形例(PPHLCT)を適用した場合の PSN R= 32. 36dBにおける再構成画像、図 25 (c)は、原画像レナの場合において、第 1 の実施の形態(PHLCT)を適用した場合の PSNR= 32. 801dBにおける再構成画 像、図 25 (d)は、原画像バーバラの場合において、通常の DCTCFPEG標準方式)を 適用した場合の PSNR = 25. 66dBにおける再構成画像、図 25 (e)は、原画像バー バラの場合にぉ ヽて、第 2の実施の形態の変形例(PPHLCT)を適用した場合の PS NR= 25. 70dBにおける再構成画像、図 25 (f)は、原画像バーバラの場合におい
て、第 1の実施の形態(PHLCT)を適用した場合の PSNR= 26. 06dBにおける再 構成画像を示す図である。
[図 26]図 26は、本発明の第 3の実施の形態に係るデータ圧縮'伸張システムの概略 を説明するブロック図である。
圆 27]図 27 (a)は、本発明の第 3の実施の形態に係るデータ圧縮 ·伸張システムの 導関数整合'局所コサイン変換 (DMLCT)回路の論理的構成を説明するブロック図 で、図 27 (b)は、本発明の第 3の実施の形態に係るデータ圧縮 ·伸張システムの導 関数整合 ·局所コサイン逆変換 (IDMLCT)回路の論理的構成を説明するブロック 図である。
[図 28]図 28は、本発明の第 3の実施の形態に係るデータ圧縮 ·伸張システムにおけ る DMLCT回路を用いたデータ圧縮方法を説明するためのフローチャートである。
[図 29]図 29 (a)〜(e)は、図 28のフローチャートに対応して、本発明の第 3の実施の 形態に係るデータ圧縮方法を、 3つの 1次元データブロックでより具体的に説明する 模式図である。
[図 30]図 30は、本発明の第 3の実施の形態に係るデータ圧縮 ·伸張システムにおけ る IDMLCT回路を用いたデータ伸張方法を説明するためのフローチャートである。
[図 31]図 31 (a)〜(d)は、図 30のフローチャートに対応して、本発明の第 3の実施の 形態に係るデータ伸張方法を、 3つの 1次元データブロックでより具体的に説明する 模式図である。
[図 32]図 32 (a)は、原画像レナの場合において、横軸に PSNR,縦軸に第 1の実施 の形態に係るデータ圧縮 ·伸張システム (PHLCT)及び第 3の実施の形態に係るデ ータ圧縮 ·伸張システム (DMLCT)の符号化レート (圧縮レート)の削減率を示す図 で、図 32 (b)は、原画像バーバラの場合において、横軸に PSNR,縦軸に第 1の実 施の形態に係るデータ圧縮 ·伸張システム (PHLCT)及び第 3の実施の形態に係る データ圧縮 ·伸張システム (DMLCT)の符号化レート (圧縮レート)の削減率を示す 図である。
[図 33]図 33は、本発明の他の実施の形態に係るデータ圧縮 ·伸張システムの概略を 説明するブロック図である。
[図 34]図 34は、本発明の更に他の実施の形態に係るデータ圧縮 ·伸張システムの概 略を説明するブロック図である。
発明を実施するための最良の形態
[0017] 次に、図面を参照して、本発明の第 1〜第 3の実施の形態を説明する。以下の図面 の記載において、同一又は類似の部分には同一又は類似の符号を付している。又、 以下に示す第 1〜第 3の実施の形態は、本発明の技術的思想を具体化するための 装置、方法やプログラムを例示するものであって、本発明の技術的思想は、構成部 品の材質、形状、構造、配置等を下記のものに特定するものでない。本発明の技術 的思想は、特許請求の範囲に記載された技術的範囲内において、種々の変更をカロ えることができる。
[0018] (第 1の実施の形態)
図 1に示すように、本発明の第 1の実施の形態に係るデータ圧縮 ·伸張システムは、 送信側端末 5と、送信側端末 5から送られてきた圧縮された画像情報のデータ (以下 、「圧縮データ」と言う。)を伝送する伝送路 32と、伝送路 32を介して送信側端末 5か ら送られてきた圧縮データを受信し、この圧縮データを伸張し、伸張された画像デー タを表示する受信側端末 6とを備える。伝送路 32には、 LAN, WAN,インターネット 、イントラネット等の情報ネットワーク (コンピュータネットワーク)が含まれる力 無線の 伝送路でも良い。
[0019] 送信側端末 5は、エンコーダ 1、撮像デバイス 11、信号処理回路 12、入力側フレー ムメモリ 13、送信回路 31,送信側量子化テーブル記憶装置 18,送信側ハフマン符 号テーブル記憶装置 19を備える。ここで、エンコーダ 1は、ブロック分割回路 14,多 重調和 ·局所コサイン変換 (PHLCT)回路 15、量子化回路 16、エントロピー符号ィ匕 回路 17を備える。伝送路 32が、インターネット等の情報ネットワークの場合は、送信 回路 31は、モデム (MODEM)、宅内回線終端装置 (DSU)、網制御装置 (NCU)、 通信制御装置 (CCU)、通信制御処理装置 (CCP)等のデータ回線終端装置が該当 する。一方、伝送路 32が無線伝送路であれば、送信回路 31は、アンテナ(受信アン テナ) 3に接続された低雑音増幅器、この低雑音増幅器に接続されたミキサ、ミキサ に接続された中間周波 (IF)増幅器、中間周波増幅器に接続された復調器等により
構成可能である。
[0020] 受信側端末 6は、デコーダ 2、出力側フレームメモリ 25、ディスプレイ 27、表示回路 26、受信回路 33、受信側量子化テーブル記憶装置 29,受信側ハフマン符号テー ブル記憶装置 28を備える。ここで、デコーダ 2は、エントロピー復号ィ匕回路 21、逆量 子化回路 22、逆 PHLCT(IPHLCT)回路 23、ブロック貼り合わせ回路 24を備える。 伝送路 32が、インターネット等の情報ネットワークの場合は、受信回路 33は、 MOD EM、 DSU、 NCU、 CCU、 CCP等のデータ回線終端装置が該当する。
[0021] 送信側端末 5の撮像デバイス 11は CCD等から構成され、被写体画像を撮影して 出力信号を生成する。信号処理回路 12は、撮像デバイス 11の出力信号から 1画面 ずつの画像データを生成する。信号処理回路 12の生成した 1画面ずつの画像デー タは、入力側フレームメモリ 13へ転送される。
[0022] 受信側端末 6の表示回路 26は、デコーダ 2から転送されてきた 1画面ずつの画像 データから画像信号を生成する。ディスプレイ 27は、表示回路 26の生成した画像信 号を被写体画像として表示する。
[0023] 入力側フレームメモリ 13及び出力側フレームメモリ 25は、例えば SDRAM、 DRA M、ラムバス DRAM等の書き換え可能な半導体メモリ等で構成可能であり、転送さ れてきた 1画面(1フレーム)毎の画像データを書き込んで記憶すると共に、記憶した 画像データを 1画面ずつ読み出す。
[0024] 図 1において、入力側フレームメモリ 13から読み出された 1画面ずつの画像データ は、エンコーダ 1へ転送される。エンコーダ 1においては、ブロック分割回路 14により 、 1画面の画像データ力JPEG方式の規格によって定められた 8 X 8画素の複数のブ ロックに分割され(図 4参照。)、 PHLCT回路 15において、各ブロック毎に多値画像 データの圧縮処理が行われる。即ち、 PHLCT回路 15は、図 2に示すように、入力画 像の DCT係数計算モジュール (入力信号の DCT係数計算モジュール) 151と、第 1 相殺関数 DCT係数計算モジュール 152と、第 2相殺関数 DCT係数計算モジュール 153と、残差計算モジュール 154とを備え、ブロック分割回路 14から、 1画面の画像 データを図 3に示すような 1ブロック単位で取り込み、その画像データに対して PHLC T処理を実行する(PHLCT回路 15の詳細は、後述する。 )。
[0025] 量子化回路 16は、 PHLCT回路 15から供給された残差 V=F— Uの DCT係数を、 送信側量子化テーブル記憶装置 18に格納されて ヽる量子化しき!ヽ値を参照して量 子化する。即ち、量子化回路 16では、表 2に示したような量子化しきい値で DCT係 数を除算することで、その商としての量子化係数を得る。上記の量子化しきい値とし ては、高周波成分に対しては大きい値が設定され、低周波成分に対しては小さい値 が設定される。なお、自然界の風景等の一般の画像では高周波成分は少ない。上記 により、量子化後の量子化係数は、高周波成分の多くが 0となる。送信側量子化テー ブル記憶装置 18に格納された量子化しき 、値は、圧縮データの圧縮率の画質を決 定するものである。
[0026] この様にして得られた量子化係数は、ジグザグスキャンと言われる走査順に取り出 され、エントロピー符号ィ匕回路 17に入力される。エントロピー符号ィ匕回路 17は、量子 化回路 16にて量子化された DCT係数を、送信側ハフマン符号テーブル記憶装置 1 9に格納されているハフマン符号を参照して可変長符号ィ匕することにより、圧縮デー タをブロック単位で生成する。エントロピー符号ィ匕回路 17では、ブロック左上隅の DC 成分と、それを除く AC成分に分けて符号ィ匕が行われ、 AC成分については、 0である 係数 (無効係数)の連続数であるゼロラン長と 0以外の係数 (有効係数)との組にされ 、この組をノヽフマン符号テーブルに従って符号ィ匕する。送信側ハフマン符号テープ ル記憶装置 19に格納されたノヽフマン符号は、量子化された DCT係数に対して予め 予測される出現頻度に応じて割り当てられる可変長の符号であり、出現頻度の高い ものに対して短く割り当てられる。
[0027] エントロピー符号ィ匕回路 17の生成したブロック単位の圧縮データは、送信回路 31 を介して、伝送路 32に転送される。伝送路 32を介して送信側端末 5から送られてき た圧縮データは、受信側端末 6の受信回路 33が受信する。受信回路 33を介して入 力された圧縮データは、デコーダ 2のエントロピー復号ィ匕回路 21へ転送される。
[0028] エントロピー復号ィ匕回路 21は、受信回路 33を介して転送されてきたブロック単位の 圧縮データを、受信側ハフマン符号テーブル記憶装置 28に格納されて ヽるハフマン 符号を参照して可変長復号化することにより、伸張された画像情報のデータ (以下、「 伸張データ」 t 、う)をブロック単位で生成する。受信側ハフマン符号テーブル記憶装
置 28に格納されたノ、フマン符号は、伸張データに対して予め予測される出現頻度に 応じて割り当てられる可変長の符号であり、出現頻度の高いものに対して短く割り当 てられる。逆量子化回路 22は、エントロピー復号ィ匕回路 21の生成したブロック単位 の伸張データを、受信側量子化テーブル記憶装置 29に格納されて 、る量子化しき い値を参照して逆量子化することにより、 DCT係数を生成する。受信側量子化テー ブル記憶装置 29に格納された量子化しきい値は、圧縮データを伸張した再生画像 の画質を決定するものである。
[0029] 逆 PHLCT回路 23は、図 10に示すように、残差入力モジュール 231と、第 1相殺関 数 DCT係数計算モジュール 232と、第 2相殺関数 DCT係数計算モジュール 233と、 入力画像の DCT係数近似'復元モジュール 234とを備え、逆量子化回路 22の生成 した DCT係数に対して逆 PHLCT処理を行う(逆 PHLCT回路 23の詳細は、後述す る。 ) o逆 PHLCT回路 23にて多重調和'局所コサイン逆変換が行われたブロック単 位の伸張データは、ブロック貼り合わせ回路 24で貼り合わせられ、 1画面ずつのデー タになる。
[0030] ブロック貼り合わせ回路 24で貼り合わせられた 1画面ずつのデータは、出力側フレ ームメモリ 25へ転送される。そして、出力側フレームメモリ 25は、デコーダ 2から転送 されてきた 1画面ずつの画像データを書き込んで記憶する。又、表示回路 26は、デ コーダ 2から転送されてきた 1画面ずつの画像データ力も画像信号を生成し、その画 像信号はディスプレイ 27上で被写体画像として表示する。
[0031] <多重調和 ·局所コサイン変換 (PHLCT)回路 >
PHLCT回路 15の説明の前に、図 3に示す 2次元ブロック領域 Ωにおける入力信 号関数 考える。実際の画像処理装置における入力信号関数 fは離散的な情報とし てのみ与えられるが,ここでは説明のため, x)を連続的な信号として扱う。図 3に示 す 2次元ブロック領域 Ωは、図 4に示すような 8 X 8画素(ピクセル)からなる。
[0032] 本発明の第 1の実施の形態に係るデータ圧縮 ·伸張システムでは,図 5 (a)に示す ような入力信号関数 x)に対し、入力信号関数 x)の傾きを相殺する関数 (以下にお いて「傾き相殺関数」と言う。)として、図 5 (b)に示すような関数 u(x)に着目する。図 5 ( a)〜図 5 (d)において、それぞれ 2本の縦方向の破線で、 2次元ブロック領域 Ωの X
方向の境界を示している。図 5 (c)に示すような残差 v(x) = f(x)— u(x)を用いて DCT 係数の収束性を改善する。傾き相殺関数 uについては,ポアソン方程式のノイマン境 界値問題
[数 1]
{Au― K in Ω,
u df ひ) -τ^ = ~ on o ,
άν ον
[0033] の解 uを用 、る。ただし,
[数 2]
[0034] I Ω Iはブロックの面積を表す。関数 uは,以下の定理に示すように,ブロック境界 で入力信号の傾きを相殺する C2級関数の中で,平均曲率の 2乗積分値を最小とす る関数である。即ち、『関数 pが閉領域 Ω (バー)において C2とし, M(p)を Ω (バー)に おける pの平均曲率の 2乗積分
[数 3]
M (n) := I (Δρ)2 άχ
Jn
[0035] とすると、 d Ω上でノイマン境界条件 3 p/ 3 v = 3 f/ 3 vを満足する任意の pに対し , M(u)≤M(p)が成立する』という定理を用いる。なお、本明細書では、 Ω (バー)は、 画
Ω
[0036] を意味する。
[0037] 一般の DCT係数の収束速度は漸近的に 0( II k II "2)に従うことが知られている。こ
こで, k = (kl, k2)は各ブロックにおける空間周波数インデックスである。一方,第 1の 実施J.の形態に係るデータ圧縮'伸張システムの PHLCT回路 15における処理では、 残差 Vの DCT係数の収束速度は 0( II k II— 4)に従う。
[0038] 次に、離散的に与えられた入力信号関数 fに対する第 1の実施の形態に係るデータ 圧縮 ·伸張システムにおける画像処理方法について述べる。図 4では 8 X 8の格子点 を例示したが、より一般的には、入力信号関数 x, y)のサンプリング点を単位正方形 領域
Ω = (0, I)2 = {(x, y) I 0 < X < 1, 0 < y < 1}
上の N X N格子点 (x , y)に配置する。ただし,
X = (0.5+0/N, y = (0.5+j)/N, (i,j=0,l,...,N— 1)
i j
である。領域 Ωの周囲に配置された離散点における入力信号関数 fの傾きを
[0039] とする。ただし,
fx := d Kx, y)/ d x及び
iy:= 3 Kx, y)/ d y
である。ポアソン方程式(1)のノイマン境界条件を 1次元離散コサイン級数を用いて 近似する:
[数 6]
- 組
0 < ί < 1, ί= 1,2,3,4
及び {G は Ωの境界上の離散点における fの傾き g g g (1)に対す k 0≤k≤N-l 0 1 N-l る 1次元 DCT係数である。この場合,ポアソン方程式(1)の解となる傾き相殺関数 u は,
[数 7] u(x, y) = u^lx, ) + η(^(τΊ y) + t/(3)j , y) + (4》 ( )
/— ΛΓ-Ι
T7∑ Afe {(θ^ - 1) + 》 )) ^ irkx
+ ( 1) + r'l ¾( ) cos由 } + c, (4) となる. ただし, cは適当な定数,
( ί^ if k = 0,
cosh wkt snih ττκ ι otherwise.
である。更に,解 u(x, y)の DCT係数 U 1^2=0,1,...^ 1)は次式で与ぇられる:
kl,k2
[数 8]
(5) ただし s
O
明らかに η 及び は入
k,m k,m o力信号とは無関係に計算可能である。参考に, Ν = 8, b
即ち,図 4に示した 8 X 8画素ブロ <x>ックサイズの場合の 7? の値を表 1に示す。
k,m
[表 1] o
b
(表 1 ) m = 1 m = 2 rn = 3 m = 4 m = St n¾ β m = 7 k = 0 0.0986 0.0421 0.0221 0.0126 0.0070 0.0032 k = i 0.4027 0.2000 0.0783 0.0376 0.0206 0.01M 0.0067 0.0031 k = 2 0扁 8 0.0785 0.0480 0.0171 0.0104 0.0060 0.0028 k - 3 0.0425 0.誦 0 0.0197 0.0132 0.0085 0.0051 0Λ024 k = 4 0.0229 0.021 0,0177 0,0135 0.0097 0.0066 0.0O41 0.0020 k = 5 0.0139 0.0115 0.0093 0.0071 0.0051 0.0032 0.0016 k = 6 0.0090 0.0087 0.0078 0.0066 0.0052 0.0038 0.0025 0.0012 k - 7 ο.οοβι 0.0054 0.0047 0.0038 0.0028 0.0019 0.0009
[0043] 実際に式 (5)に示す傾き相殺関数 uの DCT係数 Uを計算するためには,入力信号の 傾 g g (1)の DCT係数 G G G (1)の値が必要となるが,これら
0 1 N-1 0 1 N-1
の値につ 、ては,以下のように近似的に計算する。
[0044] 先ず,図 3に示すように,着目したブロック領域 Ωの上下左右に隣接する 4つのプロ ック領域を考える。図 3のそれぞれ領域 Ω( )において,入力データを
产 ΰ := Kx + s, y + t),
i,J i J
i, j = 0, 1,…,N— 1
と表記し,
Ω(0'0)= Ω及び
产0) =Kx, y)
i,J i J
とする。入力信号の傾き g(1), g(1), ., g (Dを次のように近似する:
0 1
り' =^∑ ),
—0 ~
,(s,t)
[0045] はそれぞれ行,列方向に対する入力信号の平均値である。更に, F(s,t) = (F t; )を kl,k2 それぞれのブロック領域 Ω( )における入力データ 〉の 2次元 DCT係数とすると, [数 10]
— ¾ゆ -¾o). fc = 0,l,... ,N
[0046] を得る.同様に,
[数 11]
2) - 一 ^( ^0) - ),
[0047] したがって,ポアソン方程式の解 u(x, y)の DCT係数 U , (kl,k2 = Ο,Ι,.,.,Ν— 1 )は
次式で与えられる:
[数 12]
¾ = ^ {(Fi¾^— FA'"Q)
+(4 - )^ (8)
[0048] 式(8)は、 PHLCT回路 15の第 2相殺関数 DCT係数計算モジュール 153及び逆 P HLCT回路 23の第 2相殺関数 DCT係数計算モジュール 233にお 、て計算する。 D C成分 U については,式 (4)に含まれる定数 cの任意性より,一般性を失うことなく
0,0
U = 0
0,0
とすることができる。
[0049] 第 1の実施の形態に係るデータ圧縮'伸張システムでは,入力画像の量子化誤差( 入力信号の量子化誤差) Fの代わりに,傾き相殺関数 uの DCT係数 U力も計算され る残差 V=F—Uを用いて圧縮効率の改善を図る。これは,圧縮後にエンコーダ 1から 伝送されるのは入力画像の量子化誤差 (入力信号の量子化誤差) Fではなく残差 V= F— Uであり,残差 Vから画像の再構成を試みることを意味する。したがって,デコー ダ 2側において残差 V=F— Uからもとの入力画像の量子化誤差 (入力信号の量子化 誤差) Fを復元することが可能となるように, PHLCT回路 15の第 1相殺関数 DCT係 数計算モジュール 152において、傾き相殺関数 uの DCT係数 Uを以下のように修正 する:
HHP -%)) } if 0 = ¾;
ki, a (9)
― ¾o) fca } if = o≠ ¾;
otherwise.
明らかに, Uと U (チルダ)の相違点は第 1行目及び第 1列目のみであり, U (チルダ) におけるこれらの値は,対象ブロック及び隣接ブロックの DC成分のみから求められる 。したがって、式 (9)は、逆 PHLCT回路 23の第 1相殺関数 DCT係数計算モジユー ル 232における計算にも用いられる。なお、本明細書では、 U (チルダ)は、
[数 14]
U を意味する。同様に、 V (チルダ)が、
[数 15]
V を意味するものとすれば、修正後の残差 V (チルダ) :=F— U (チルダ)は次式となる: [数 16]
[0053] 残差 V (チルダ): = F— U (チルダ)の計算は、 PHLCT回路 15の残差計算モジユー ル 154で行う。残差計算モジュール 154で計算された残差 V (チルダ)は、それぞれ のブロック領域毎のデータとして、量子化回路 16に伝送され、更にエントロピー符号 化回路 17及び送信回路 31を経て、伝送路 32に転送される。伝送路 32を介して送ら れてきた圧縮データは、受信側端末 6の受信回路 33を介して入力され、デコーダ 2 のエントロピー復号ィ匕回路 21へ転送され、逆量子化回路 22を経て逆 PHLCT回路 2 3に入力される。そして、逆 PHLCT回路 23では、 V (チルダ)を用いて画像を再構成 する。ここで, V (チルダ) =F を確認しておく。以下において、本明細書では、記号
0,0 0,0
の表記を簡単にするため, u及び Vの表記は,それぞれ u (チルダ)及び V (チルダ) を指しているものとする。
[0054] 送信側端末 5の送信側量子化テーブル記憶装置 18に格納された量子化テーブル を Qとし,その要素を Q (≥1)とすると, DCT係数 Fは、エンコーダ 1の量子化回路 1 k
6において、次のように量子化される:
[数 17] tfc := muad(Fk/Qh); := Qk x tfe, fc e X; (11) ただし := {k = (fc, , ¾) l = 0, 1, 2, . . . , 7 }.
[0055] エンコーダ 1の量子化回路 16において量子化された DCT係数列 {i }は,エンコーダ k
1のエントロピー符号ィ匕回路 17による符号ィ匕の後に、送信回路 31を経て、伝送路 32 に転送され、伝送路 32を伝送される。
[0056] 図 8に示すフローチャートを用いて、本発明の第 1の実施の形態に係る PHLCT回 路 15を用いたデータ圧縮方法を説明する。なお、以下に述べるデータ圧縮方法は、 一例であり、この変形例を含めて、これ以外の種々の方法により、実現可能であること は勿論である。
[0057] (a)エンコーダ 1のブロック分割回路 14を用い、ステップ S101において、入力側フ レームメモリ 13から伝送された入力画像を、図 4に示すような 8 X 8画素からなるデー タブロックに分割する。データブロックに分割された入力画像のデータは、エンコーダ 1の PHLCT回路 15に転送される。
(b) PHLCT回路 15の入力画像の DCT係数計算モジュール (入力信号の DCT係 数計算モジュール) 151は、ステップ S 111にお!/、て、図 9 (a)及び(c)に示すように、 対象となる中央のデータブロック、及び対象となるデータブロックの上下左右に隣接 する 4つのデータブロックの各々に DCT処理を適用する。これにより、それぞれのデ 一タブロックに対する入力画像の量子化誤差 (入力信号の量子化誤差) Fを計算す る。
(c) PHLCT回路 15の第 1相殺関数 DCT係数計算モジュール 152は、ステップ S1 12において、式 (9)を用い, V (=F )から傾き相殺関数 uの DCT係数 Uの第 1行
0,0 0,0 k 及び第 1列の成分を図 9 (b)に示すように、計算する(図 6 (a)のハッチングをした画素 が第 1行及び第 1列の成分に対応する。 ) o
[0058] (d) PHLCT回路 15の第 2相殺関数 DCT係数計算モジュール 153は、ステップ S 113において、図 9 (c)に示した入力画像の量子化誤差 (入力信号の量子化誤差) F に対し式 (8)を用い,傾き相殺関数 uの DCT係数 Uの k -k >0成分を図 9 (d)に示 k 1 2
すように、計算する(図 6 (b)のハッチングをした画素が k -k >0成分となる画素に対
1 2
応する。 ) o図 9 (b)に示した第 1行及び第 1列の成分、図 9 (d)に示した k -k >0成分
1 2 は、図 9 (e)に示すようにまとめられる。
(e) PHLCT回路 15の残差計算モジュール 154は、ステップ S114において、図 9 ( e)に示した傾き相殺関数 uの DCT係数 Uから、残差 V=F— Uを図 9 (f)に示すように k
計算する。図 9 (f)に示した残差 V=F—Uは、エンコーダ 1の量子化回路 16に出力さ れる。
[0059] (f)量子化回路 16は、ステップ S103において、送信側量子化テーブル記憶装置 1 8に格納されている量子化しきい値 Qを参照して、残差 V=F— Uの量子化:
k
i =round(V /Q )
k k k
を実行し、 V を Qで除した整数部分が、ジグザグスキャンと言われる走査順に {i }と
k k k して取り出される。 {i }は、エンコーダ 1のエントロピー符号ィ匕回路 17に入力される。
k
[0060] (g)エントロピー符号ィ匕回路 17は、ステップ S104において、送信側ハフマン符号 テーブル記憶装置 19に格納されているハフマン符号を参照して {i }の符号化を実行
k
する。エントロピー符号ィ匕回路 17の生成したブロック単位の圧縮データは、送信回路 31を介して、伝送路 32に転送される。
[0061] 図 8に示したフローチャートで、ステップ S 112及びステップ S 113の処理力 従来の JPEG標準方式に付加されているが,それ以外 ίお PEG標準方式と全く同一の処理 である。
[0062] 図 8に示した一連のデータ圧縮処理は、図 8と等価なアルゴリズムのプログラムによ り、図 1に示したエンコーダ 1を制御して実行出来る。このプログラムは、本発明の第 1 の実施の形態に係るエンコーダ 1を構成するコンピュータシステムのプログラム記憶 装置(図示省略)に記憶させれば良い。又、このプログラムは、コンピュータ読取り可 能な記録媒体に保存し、この記録媒体をエンコーダ 1のプログラム記憶装置に読み 込ませることにより、本発明の一連のデータ圧縮処理を実行することができる。
[0063] 即ち、本発明の第 1の実施の形態に係るデータ圧縮プログラムは、入力情報を、複 数のブロック領域に等分割して、入力情報のデータを圧縮するエンコーダ 1に、
(a)複数のブロック領域中の対象ブロック領域と、この対象ブロック領域に隣接する ブロック領域におけるそれぞれの入力信号の DCT係数 Fを計算する命令;
(b)入力信号の DCT係数 Fから、対象ブロック領域と、隣接するブロック領域とのブ ロック境界において、入力信号のブロック境界における傾きを相殺する傾き相殺関数 の DCT係数 Uを計算する命令;
(c)入力信号の DCT係数 Fと、傾き相殺関数の DCT係数 Uの残差 Vを計算する命 令; (d)残差 Vの量子化及び符号化を行 ヽ圧縮データを得る命令
とを含む一連の命令を実行させる。
[0064] ここで、「コンピュータ読取り可能な記録媒体」とは、例えばコンピュータの外部メモリ 装置、半導体メモリ、磁気ディスク、光ディスク、光磁気ディスク、磁気テープなどのプ ログラムを記録することができるような媒体などを意味する。具体的には、フレキシブ ルディスク、 CD-ROM, MOディスク、磁気テープなどが「コンピュータ読取り可能 な記録媒体」に含まれる。例えば、エンコーダ 1の本体は、フレキシブルディスク装置 (フレキシブルディスクドライブ)及び光ディスク装置 (光ディスクドライブ)を内蔵若しく は外部接続するように構成出来る。フレキシブルディスクドライブに対してはフレキシ ブルディスクを、又光ディスクドライブに対しては CD—ROMをその挿入口から挿入 し、所定の読み出し操作を行うことにより、これらの記録媒体に格納されたプログラム をエンコーダ 1を構成するプログラム記憶装置にインストールすることができる。又、所 定のドライブ装置を接続することにより、例えばゲームパック等に利用されて 、るメモ リ装置としての ROMや、磁気テープ装置としてのカセットテープを用いることもできる 。更に、インターネット等の情報処理ネットワークを介して、このプログラムをプログラム 記憶装置に格納することが可能である。
[0065] <多重調和 ·局所コサイン逆変換 (IPHLCT)回路 >
デコーダ 2側では,伝送路 32を伝送されたデータを受信回路 33を介して入力し、 デコーダ 2のエントロピー復号ィ匕回路 21で逆符号ィ匕した後、受信側量子化テーブル 記憶装置 29に格納された量子化テーブルを用いて逆量子化し、更に、逆 PHLCT 回路 23において、残差 Vの逆量子化された DCT係数残差 V Qに対して、逆 DCT(ID k
CT)を施すことによって画像を再構成する。
[0066] 図 11に示すフローチャートを用いて、本発明の第 1の実施の形態に係る逆 PHLC T回路 23を用いたデータ伸張方法を説明する。なお、以下に述べるデータ伸張方法 は、一例であり、この変形例を含めて、これ以外の種々の方法により、実現可能であ ることは勿論である。
[0067] (a)デコーダ 2のエントロピー復号ィ匕回路 21は、受信回路 33を介して転送されてき たブロック単位の圧縮データを、ステップ S201において、受信側ハフマン符号テー ブル記憶装置 28に格納されて 、るハフマン符号を参照して可変長復号ィ匕する。これ により、伸張データがブロック単位で生成される。
[0068] (b)デコーダ 2の逆量子化回路 22は、エントロピー復号ィ匕回路 21の生成したブロッ ク単位の伸張データを、ステップ S202において、受信側量子化テーブル記憶装置 2 9に格納されて 、る量子化しき!、値 Qを参照して逆量子化:
k
V Q = Q X i
k k k
することにより、残差 V=F— Uの逆量子化された量子化誤差 V Qを生成する。残差 V k
の逆量子化された量子化誤差 V Qは、逆 PHLCT回路 23の残差入力モジュール 23 k
1に転送される。
[0069] (c)逆 PHLCT回路 23の残差入力モジュール 231は、ステップ S211において、図 12 (a)及び (c)に示すように、対象となる中央のデータブロック、及び対象となるデー タブロックの上下左右に隣接する 4つのデータブロックの各々に残差 Vの逆量子化さ れた DCT係数残差 V Qを入力する。
k
(d)逆 PHLCT回路 23の第 1相殺関数 DCT係数計算モジュール 232は、ステップ S212において、式 (9)を用い, VQ (=FQ )から傾き相殺関数 uの DCT係数 U Qの
0,0 0,0 k 第 1行及び第 1列の成分を図 12 (b)に示すように、計算する。
(e)逆 PHLCT回路 23の第 2相殺関数 DCT係数計算モジュール 233は、ステップ S213では、図 12 (c)に示したように、ステップ S212で第 1相殺関数 DCT係数計算 モジュール 232によって計算された U Qの第 1行及び第 1列の成分に、 V Qの第 1行 k k 及び第 1列の成分を足しこみ、これを入力画像の量子化誤差 (入力信号の量子化誤 差) FQの第 1行及び第 1列の成分の近似とし、この入力画像の量子化誤差 (入力信 号の量子化誤差) FQに対し式 (8)を用い,傾き相殺関数 uの DCT係数 U 9の1^ -k >0 k 1 2 成分を図 12 (d)に示すように、計算する。
(f)逆 PHLCT回路 23の入力画像の DCT係数近似 ·復元モジュール 234は、ステ ップ S214において、図 12 (e)に示すように、残差 Vの逆量子化された量子化誤差 V Qに UQを加え、
F«==VQ + UQ
を近似'復元する。
[0070] (g)更に、入力画像の DCT係数近似'復元モジュール 234は、ステップ S215にお いて、 UQ+V Q〖こ対し,ブロック毎に IDCT処理を適用し、多値画像データを復元する
[0071] (h)デコーダ 2のブロック貼り合わせ回路 24は、 IDCT処理の結果得られた多値画 像データを用いて、ステップ S204において、各ブロックを図 3に示すように、貼り合わ せる。ブロック貼り合わせ回路 24で貼り合わせられた 1画面ずつのデータは、出力側 フレームメモリ 25へ転送される。
[0072] 図 11に示したフローチャートで、ステップ S211〜ステップ S214の処理が、従来の J PEG標準方式に付加されて ヽるが,それ以外〖お PEG標準方式と全く同一の処理で ある。元の JPEG標準方式に対する計算コストの増加は、主に Uあるいは UQに関す るコストであり, N X N画素データブロックあたり約 3C N2 + 4C N2と評価出来る。ここ
1 2
で, C及び Cはそれぞれ加減算,積算に要する単位コストである。
1 2
[0073] 図 11に示した一連のデータ伸張処理は、図 11と等価なアルゴリズムのプログラム により、図 1に示したデコーダ 2を制御して実行出来る。このプログラムは、本発明の デコーダ 2を構成するコンピュータシステムのプログラム記憶装置(図示省略)に記憶 させれば良い。又、このプログラムは、コンピュータ読取り可能な記録媒体に保存し、 この記録媒体をデコーダ 2のプログラム記憶装置に読み込ませることにより、本発明 の一連のデータ伸張処理を実行することができる。
[0074] 即ち、本発明の第 1の実施の形態に係るデータ伸張プログラムは、入力情報が複 数のブロック領域に等分割され、ブロック領域毎に入力情報のデータが圧縮された 圧縮データを伸張し、入力情報を復元するデコーダ 2に、
(a)圧縮データに対し逆符号ィヒ及び逆量子化を行い、逆量子化された量子化誤差 VQをブロック領域毎に得る命令;
(b)対象ブロック領域と、この対象ブロック領域に隣接するブロック領域とのブロック 境界にお 、て、対象ブロック領域における入力信号の傾きを相殺する傾き相殺関数 の DCT係数 UQを、逆量子化された量子化誤差 VQから計算する命令;
(c)逆量子化された量子化誤差 VQに傾き相殺関数の DCT係数 UQを加え、入力信 号の DCT係数 FQを近似的に復元する命令;
(d)近似的に復元された入力信号の DCT係数 FQから、入力信号をブロック領域毎 に得る命令;
(e)ブロック領域毎の入力信号を互いに貼り合わせ、入力情報を復元する命令とを 含む一連の命令を実行させる。
[0075] ここで、「コンピュータ読取り可能な記録媒体」とは、第 1の実施の形態に係るデータ 圧縮プログラムで説明したような、コンピュータの外部メモリ装置、半導体メモリ、磁気 ディスク、光ディスク、光磁気ディスク、磁気テープなどのプログラムを記録することが できるような媒体などを意味する。例えば、デコーダ 2の本体は、フレキシブルデイス ク装置 (フレキシブルディスクドライブ)及び光ディスク装置 (光ディスクドライブ)を内 蔵若しくは外部接続するように構成出来る。フレキシブルディスクドライブに対しては フレキシブルディスクを、又光ディスクドライブに対しては CD— ROMをその挿入口 から挿入し、所定の読み出し操作を行うことにより、これらの記録媒体に格納されたプ ログラムをデコーダ 2を構成するプログラム記憶装置にインストールすることができる。 更に、インターネット等の情報処理ネットワークを介して、このプログラムをプログラム 記憶装置に格納することが可能である。
[0076] (第 2の実施の形態)
図 13に示すように、本発明の第 2の実施の形態に係るデータ圧縮 ·伸張システムは 、第 1の実施の形態に係るデータ圧縮 ·伸張システムと同様に、送信側端末 5Pと、送 信側端末 5Pから送られてきた圧縮データを伝送する伝送路 32と、伝送路 32を介し て送信側端末 5Pから送られてきた圧縮データを受信し、この圧縮データを伸張し、 伸張された画像データを表示する受信側端末 6Pとを備える。
[0077] 第 2の実施の形態に係るデータ圧縮'伸張システムでは,送信側端末 5Pが、 JPEG 標準方式に従 、エンコードされた圧縮データを伝送路 32を介して、受信側端末 6P に伝送し、受信側端末 6Pにのみ多重調和'局所コサイン逆変換を適用することによ つて量子化によって失われた情報を推定する方法,即ち,デコーダ側の処理の改善 のみで再構成画像の改善を実現する「部分モード (Partial mode)」のデータ圧縮 '伸 張システムについて述べる。本明細書では、第 2の実施の形態において定義した部 分モードのデータ圧縮 ·伸張システムに対し、第 1の実施の形態に係るデータ圧縮 · 伸張システムは、送信側端末 5のエンコーダ 1で、多重調和'局所コサイン変換を行 V、、受信側端末 6のデコーダ 2で多重調和 ·局所コサイン逆変換を行うモードである
ので「フルモード(Full mode)のデータ圧縮 ·伸張システム」と定義する。
[0078] 即ち、第 2の実施の形態に係る部分モードのデータ圧縮'伸張システムの送信側端 末 5Pは、 JPEG標準方式のエンコーダ 1P、撮像デバイス 11、信号処理回路 12、入 力側フレームメモリ 13、送信回路 31,送信側量子化テーブル記憶装置 18,送信側 ハフマン符号テーブル記憶装置 19を備える。 JPEG標準方式のエンコーダ 1Pは、ブ ロック分割回路 14, JPEG標準方式の DCT回路 35、量子化回路 16、エントロピー符 号ィ匕回路 17を備える点で、第 1の実施の形態に係るデータ圧縮 ·伸張システムとは 異なる。
[0079] 一方、第 2の実施の形態に係る部分モードのデータ圧縮.伸張システムの受信側端 末 6Pは、多重調和 ·局所コサイン逆変換を適用するデコーダ 2P、出力側フレームメ モリ 25、ディスプレイ 27、表示回路 26、受信回路 33、受信側量子化テーブル記憶 装置 29,受信側ハフマン符号テーブル記憶装置 28を備える。多重調和,局所コサイ ン逆変換を適用するデコーダ 2Pは、エントロピー復号ィ匕回路 21、逆量子化回路 22 、部分モード多重調和'局所コサイン変換(PPHLCT: Partial mode PolyHarmonic L ocal Cosine Transform)回路 36a、ブロック貼り合わせ回路 24を備える。
[0080] 送信側端末 5Pの撮像デバイス 11、信号処理回路 12、入力側フレームメモリ 13及 び受信側端末 6Pの表示回路 26、ディスプレイ 27及び出力側フレームメモリ 25等は 、第 1の実施の形態に係るデータ圧縮 ·伸張システムと同様で良いので重複した説明 を省略する。
[0081] 図 13において、入力側フレームメモリ 13から読み出された 1画面ずつの画像デー タは、エンコーダ 1Pへ転送される。エンコーダ 1Pにおいては、ブロック分割回路 14 により、 1画面の画像データ力JPEG方式の規格によって定められた 8 X 8画素の複 数のブロックに分割され(図 4参照。)、 JPEG標準方式の DCT回路 35において、各 ブロック毎に多値画像データの圧縮処理が行われる。 量子化回路 16は、 DCT回 路 35から供給された入力画像 Fの DCT係数を、送信側量子化テーブル記憶装置 1 8に格納されている量子化しきい値を参照して量子化する。即ち、量子化回路 16で は、表 2に示したような量子化しきい値で DCT係数を除算することで、その商としての 量子化係数を得る。この様にして得られた量子化係数は、ジグザグスキャンと言われ
る走査順に取り出され、エントロピー符号ィ匕回路 17に入力される。エントロピー符号 化回路 17は、量子化回路 16にて量子化された入力画像 Fの DCT係数を、送信側 ハフマン符号テーブル記憶装置 19に格納されているハフマン符号を参照して可変 長符号ィ匕することにより、圧縮データをブロック単位で生成する。エントロピー符号ィ匕 回路 17の生成したブロック単位の圧縮データは、送信回路 31を介して、伝送路 32 に転送される。伝送路 32を介して送信側端末 5Pから送られてきた圧縮データは、受 信側端末 6Pの受信回路 33が受信する。受信回路 33を介して入力された圧縮デー タは、デコーダ 2Pのエントロピー復号ィ匕回路 21へ転送される。
[0082] JPEG標準方式におけるデータ圧縮は,主に,入力画像の量子化誤差 (入力信号 の量子化誤差) F の高周波成分が量子化操作を経て切り捨てられることによって実 k
現される。第 1の実施の形態に係るデータ圧縮 ·伸張システムにおける議論にあるよう に,周波数インデックス kに対する入力画像の量子化誤差 (入力信号の量子化誤差 ) F及び多重調和 ·局所コサイン変換における残差 Vの漸近的な振る舞いは次のよ k k
うに表される:
[数 18]
Fk = O Iに-2), Vfe = Oき |「4) as I网→ oo .
[0083] 即ち, || k II→∞において、入力画像の量子化誤差 (入力信号の量子化誤差) F k
U であり,傾き相殺関数 uの DCT係数 U を用いて量子化によって切り捨てられた k k
高周波帯の DCT係数 Fの推定が可能となる。実際には式 (8)及び式(9)において F k
( )の代わりに量子化後の F (s't)Qを用いて計算された U Qを用いることになるが, U Qと k k k k
U との誤差は次式で評価される:
k
[数 19]
[0084] ただし E は F
(s'
t)Qに含まれる量子化誤差に対する評価
[数 20] max \JF
[0085] である。明らかに, U Qt\Jとの誤差は, DCT係数 F (s't)Qの第 1行及び第 1列の成分 k k k
に含まれる量子化誤差にのみ依存している。以上の議論に基づき,第 2の実施の形 態に係る部分モードのデータ圧縮 ·伸張システムの基本手法を以下のように、提供す る:
[数 21] if K€ t,
Replace / by i + , (12)
[0086] ただし
[数 22] t < Q&/2 }.
[0087] 第 2の実施の形態に係る部分モードのデータ圧縮'伸張システムのデコーダ 2Pが 内蔵するエントロピー復号ィ匕回路 21は、受信回路 33を介して転送されてきたブロッ ク単位の圧縮データを、受信側ハフマン符号テーブル記憶装置 28に格納されて 、 るハフマン符号を参照して可変長復号ィ匕することにより、伸張データをブロック単位 で生成する。受信側ハフマン符号テーブル記憶装置 28に格納されたハフマン符号 は、伸張データに対して予め予測される出現頻度に応じて割り当てられる可変長の 符号であり、出現頻度の高いものに対して短く割り当てられる。逆量子化回路 22は、 エントロピー復号ィ匕回路 21の生成したブロック単位の伸張データを、受信側量子化 テーブル記憶装置 29に格納されている量子化しきい値を参照して逆量子化すること
により、 DCT係数を生成する。受信側量子化テーブル記憶装置 29に格納された量 子化しき 、値は、圧縮データを伸張した再生画像の画質を決定するものである。
[0088] デコーダ 2Pの PPHLCT回路 36aは、図 14に示すように、 DCT係数入力モジユー ル 361と、第 1相殺関数 DCT係数計算モジュール 362と、第 2相殺関数 DCT係数計 算モジュール 363と、量子化誤差計算モジュール 364と、量子化誤差補正モジユー ル 365とを備え、逆量子化回路 22の生成した DCT係数に対して多重調和 ·局所コ サイン逆変換を行う(PPHLCT回路 36aの詳細は、後述する。 ) 0 PPHLCT回路 36 aにて多重調和 ·局所コサイン逆変換が行われたブロック単位の伸張データは、ブロ ック貼り合わせ回路 24で貼り合わせられ、 1画面ずつのデータになる。
[0089] ブロック貼り合わせ回路 24で貼り合わせられた 1画面ずつのデータは、出力側フレ ームメモリ 25へ転送される。そして、出力側フレームメモリ 25は、デコーダ 2Pから転 送されてきた 1画面ずつの画像データを書き込んで記憶する。又、表示回路 26は、 デコーダ 2Pから転送されてきた 1画面ずつの画像データ力 画像信号を生成し、そ の画像信号はディスプレイ 27上で被写体画像として表示する。
[0090] 図 15に示すフローチャートを用いて、本発明の第 2の実施の形態に係る PPHLCT 回路 36aを用いたデータ伸張方法を説明する。なお、以下に述べるデータ伸張方法 は、一例であり、この変形例を含めて、これ以外の種々の方法により、実現可能であ ることは勿論である。
[0091] (a)デコーダ 2Pのエントロピー復号ィ匕回路 21は、受信回路 33を介して転送されて きたブロック単位の圧縮データを、ステップ S301において、受信側ハフマン符号テ 一ブル記憶装置 28に格納されて 、るハフマン符号を参照して可変長復号ィ匕する。こ れにより、伸張データがブロック単位で生成される。
[0092] (b)デコーダ 2Pの逆量子化回路 22は、エントロピー復号化回路 21の生成したブロ ック単位の伸張データ {i }を、ステップ S302において、受信側量子化テーブル記憶
k
装置 29に格納されて 、る量子化しき!、値 Qを参照して式(11)で示される逆量子化
k
することにより、入力画像の逆量子化後の DCT係数 F Qを生成する。入力画像の逆
k
量子化後の DCT係数 F Qは、 PPHLCT回路 36aの DCT係数入力モジュール 361
k
に転送される。
[0093] (c) PPHLCT回路 36aの DCT係数入力モジュール 361は、ステップ S311におい て、図 16 (a)に示すように、対象となる中央のデータブロック、及び対象となるデータ ブロックの上下左右に隣接する 4つのデータブロックの各々に入力画像の逆量子化 後の DCT係数 DCT係数 F Qを入力する。
k
(d) PPHLCT回路 36aの第 1相殺関数 DCT係数計算モジュール 362は、ステップ S312において、式 (9)を用い, VQ (=FQ )から傾き相殺関数 uの DCT係数 U Qの
0,0 0,0 k 第 1行及び第 1列の成分を計算する。
(e) PPHLCT回路 36aの第 2相殺関数 DCT係数計算モジュール 363は、ステップ S313〖こおいて、図 16 (a)に示した入力画像の逆量子化後の DCT係数 FQに対し式 ( 8)を用い,傾き相殺関数 uの DCT係数 U 9の1^ -k >0成分を計算する。そして、ステ k 1 2
ップ S313にお!/ヽて、計算した k -k〉0成分と、ステップ S312にお!/ヽて計算した第 1
1 2
行及び第 1列の成分とを図 16 (b)に示すように合成する。
(f) PPHLCT回路 36aの量子化誤差計算モジュール 364は、ステップ S314にお いて、式(12)を用いて量子化誤差 dを計算する。
k
(g)更に、 PPHLCT回路 36aの量子化誤差補正モジュール 365は、ステップ S31 5において、 | d I ≤Q /2ならば、図 16 (c)に示すように入力画像の逆量子化後の k k
DCT係数 F Qを F Q + dで置き換える。 | d >
k k k k I Q /2ならば、何もしないで、入力画 k
像の逆量子化後の DCT係数 F Qをそのまま採用する。
k
[0094] (h)この様にして、デコーダ 2Pの PPHLCT回路 36aは、入力画像の逆量子化後の DCT係数 FQに対し,ブロック毎に IDCTを適用し、多値画像データを推定し、ステツ プ S316において、デコーダ 2Pのブロック貼り合わせ回路 24に多値画像データを出 力する。
[0095] (i)デコーダ 2Pのブロック貼り合わせ回路 24は、 IDCT処理の結果得られた多値画 像データを用いて、ステップ S304において、各ブロックを図 3に示すように、貼り合わ せる。ブロック貼り合わせ回路 24で貼り合わせられた 1画面ずつのデータは、出力側 フレームメモリ 25へ転送される。
[0096] 第 2の実施の形態に係る部分モードのデータ圧縮'伸張システムの計算コストには ,第 1の実施の形態で説明したフルモードデータ圧縮'伸張システムと比較し,量子
化誤差 dの計算に要するコストが新たに含まれる。式(12)より,量子化誤差 dの計算 k k コストは, 1ブロックあたり 3N2回の比較処理に要するコストである。
[0097] 図 15に示した一連のデータ伸張処理は、図 15と等価なアルゴリズムのプログラム により、図 13に示したデコーダ 2Pを制御して実行出来る。このプログラムは、本発明 のデコーダ 2Pを構成するコンピュータシステムのプログラム記憶装置(図示省略)に 記憶させれば良い。又、このプログラムは、コンピュータ読取り可能な記録媒体に保 存し、この記録媒体をデコーダ 2Pのプログラム記憶装置に読み込ませることにより、 本発明の一連のデータ伸張処理を実行することができる。
[0098] 即ち、本発明の第 2の実施の形態に係るデータ伸張プログラムは、入力情報が複 数のブロック領域に等分割され、ブロック領域毎に入力情報のデータが圧縮された 圧縮データを伸張し、入力情報を推定するデコーダ 2Pに、
(a)圧縮データに対し逆符号ィヒ及び逆量子化を行い、逆量子化された量子化誤差 FQをブロック領域毎に得る命令;
(b)対象ブロック領域と、この対象ブロック領域に隣接するブロック領域とのブロック 境界にお 、て、対象ブロック領域における入力信号の傾きを相殺する傾き相殺関数 の DCT係数 UQを、逆量子化された量子化誤差 FQから計算する命令;
(c)傾き相殺関数の DCT係数 UQから量子化誤差 dを計算する命令;
(d)この量子化誤差 dを用いて、逆量子化された量子化誤差 FQを補正し、入力信号 の DCT係数のより良い近似を求める (入力信号の量子化誤差を近似的に推定する) 命令;
(e)上記の入力信号の DCT係数のより良い近似(近似的に復元された入力信号の DCT係数)から、入力信号をブロック領域毎に得る命令;
(f)ブロック領域毎の入力信号を互いに貼り合わせ、入力情報を推定する命令 とを含む一連の命令を実行させる。
[0099] ここで、「コンピュータ読取り可能な記録媒体」とは、第 1の実施の形態に係るデータ 圧縮プログラムで説明したような、コンピュータの外部メモリ装置、半導体メモリ、磁気 ディスク、光ディスク、光磁気ディスク、磁気テープなどのプログラムを記録することが できるような媒体などを意味する。例えば、デコーダ 2Pの本体は、フレキシブルデイス
ク装置 (フレキシブルディスクドライブ)及び光ディスク装置 (光ディスクドライブ)を内 蔵若しくは外部接続するように構成出来る。更に、インターネット等の情報処理ネット ワークを介して、このプログラムをプログラム記憶装置に格納することが可能である。
[0100] (第 2の実施の形態の変形例)
第 2の実施の形態の変形例に係るデータ圧縮 ·伸張システムは,図 13に示した第 2 の実施の形態に係るデータ圧縮 ·伸張システムと同様に、送信側端末 5Pが、 JPEG 標準方式に従 、エンコードされた圧縮データを伝送路 32を介して、受信側端末 6P に伝送し、受信側端末 6Pにのみ多重調和'局所コサイン逆変換を適用することによ つて量子化によって失われた情報を推定する部分モードのデータ圧縮 ·伸張システ ムである。
[0101] 図 13に示した第 2の実施の形態の変形例に係るデータ圧縮 ·伸張システムと同様 に、第 2の実施の形態の変形例に係る部分モードのデータ圧縮 ·伸張システムの受 信側端末 6Pは、多重調和 ·局所コサイン逆変換を適用するデコーダ 2P、出力側フレ ームメモリ 25、ディスプレイ 27、表示回路 26、受信回路 33、受信側量子化テーブル 記憶装置 29,受信側ハフマン符号テーブル記憶装置 28を備えるが、多重調和 ·局 所コサイン逆変換を適用するデコーダ 2Pは、ブロック歪み除去機能を有する点で、 図 13に示したデータ圧縮 ·伸張システムとは異なる。
[0102] 「ブロック歪」とは,特に低符号化レート(ビットレート)での圧縮処理を経て再構成さ れた画像のブロック境界に生じる歪であり,原画像では本来滑らかであったはずの部 分にも現れるため,非常に観測者の目に付く歪である。第 2の実施の形態の変形例 に係るデータ圧縮 ·伸張システムでは,次式の 2次曲面を各々のデータブロックに加 算し,ブロック歪を軽減する方法を提供する:
[数 23]
. )
p( y) (ay― \){y― 1)-^— (1— y — l)y--^~- )
- ( x一 \)(x— 1) (Q(1— x)— l)x (13) ただし, a = (6Λί
2)/(2ΛΓ
3 + 1)および
^ = EWf - ), 3
) = f∑ F
Q-^→^
[0103] 2次曲面 p(x, y)を隣接するデータブロックにそれぞれ加えた場合,ブロック歪は境界 平均の意味で取り除かれる。 2次曲面 pの DCT係数は,
[数 24]
0 if kt =h2 = 0;
/iV ( ΐ·, 3)―ザ S^) if h - 0 = ;
(14) /N (7fc, 1)― Ί* ^) if fc, = 0≠ ½
0 otherwise,
となる. ただし,
[0104] 即ち、第 2の実施の形態の変形例に係るデータ圧縮.伸張システムのデコーダ 2P は、図 13に示した第 2の実施の形態に係るデータ圧縮 ·伸張システムと同様に、ェン トロピー復号化回路 21、逆量子化回路 22 PPHLCT回路 36b、ブロック貼り合わせ 回路 24を備える力 PPHLCT回路 36bが、図 17に示すように、 DCT係数入力モジ ユール 361と、第 1相殺関数 DCT係数計算モジュール 362と、第 2相殺関数 DCT係
数計算モジュール 363と、量子化誤差計算モジュール 364と、 2次曲面 DCT係数計 算モジュール 366と、 2次曲面量子化誤差補正モジュール 367とを備える点で、図 1 4に示した第 2の実施の形態に係るデータ圧縮 ·伸張システムの PPHLCT回路 36a とは異なる。
[0105] 送信側端末 5Pの撮像デバイス 11、信号処理回路 12、入力側フレームメモリ 13及 び受信側端末 6Pの表示回路 26、ディスプレイ 27及び出力側フレームメモリ 25等は 、第 1及び第 2の実施の形態に係るデータ圧縮'伸張システムと同様で良いので重複 した説明を省略する。
[0106] 図 18に示すフローチャートを用いて、本発明の第 2の実施の形態の変形例に係る PPHLCT回路 36bを用いたデータ伸張方法を説明する。ステップ S301及びステツ プ S302は、図 15に示したフローチャートと同様であるので、重複した説明を省略し、 第 2の実施の形態の変形例では、図 15に示したフローチャートのステップ S303に対 応して、入力画像の逆量子化後の DCT係数 F Qを推定する処理、即ち、ステップ S3 k
02以降で、ステップ S304の直前までの処理にっ 、て説明する。
[0107] (a)第 2の実施の形態の変形例に係る PPHLCT回路 36bの DCT係数入力モジュ 一ノレ 361は、ステップ S321にお!/、て、 019 (a)に示すように、対象となる中央のデ 一タブロック、及び対象となるデータブロックの上下左右に隣接する 4つのデータブロ ックの各々に入力画像の逆量子化後の DCT係数 DCT係数 F Qを入力する。
k
(b) PPHLCT回路 36bの第 1相殺関数 DCT係数計算モジュール 232は、ステップ S322において、式 (9)を用い, VQ (=FQ )から傾き相殺関数 uの DCT係数 U。の
0,0 0,0 k 第 1行及び第 1列の成分を計算する。
(c) PPHLCT回路 36bの第 2相殺関数 DCT係数計算モジュール 233は、ステップ S323において、図 19 (a)に示した入力画像の逆量子化後の DCT係数 FQに対し式 ( 8)を用い,傾き相殺関数 uの DCT係数 U 9の1^ -k >0成分を計算する。そして、ステ k 1 2
ップ S323にお!/ヽて、計算した k -k〉0成分と、ステップ S322にお!/ヽて計算した第 1
1 2
行及び第 1列の成分とを図 19 (b)に示すように合成する。
(d) PPHLCT回路 36bの量子化誤差計算モジュール 364は、ステップ S324にお いて、式(12)を用いて量子化誤差 dを計算する。
[0108] (e) PPHLCT回路 36bの 2次曲面 DCT係数計算モジュール 366は、ステップ S32 5において、式(14)を用いて 2次曲面 pの DCT係数 Pを、図 19 (c)に示すように計算
k
する。そして、図 19 (d)に示すように、 2次曲面 DCT係数計算モジュール 366は、傾 き相殺関数 uの DCT係数 U Qに 2次曲面 pの DCT係数 Pを加算する。
k k
[0109] (f)更に、 PPHLCT回路 36bの 2次曲面量子化誤差補正モジュール 367は、ステ ップ S326において、 I d +P I ≤Q /2ならば、図 19 (e)に示すように入力画像の
k k k
逆量子化後の DCT係数 F Qを F Q+d +Pで置き換える。 /2ならば
k k k k I d +P
k k I >Q
k
、図 19 (f)に示すように、何もしないで、 U Q+Pをそのまま採用する。
k k
[0110] (g)この様にして、デコーダ 2Pの PPHLCT回路 36bは、入力画像の逆量子化後の DCT係数 FQに対し,ブロック毎に IDCTを適用し、多値画像データを推定し、ステツ プ S327において、デコーダ 2Pのブロック貼り合わせ回路 24に多値画像データを出 力する。
[0111] 第 2の実施の形態の変形例に係るデータ圧縮 ·伸張システムによって付加されるコ ストは, 2次曲面 pの DCT係数 Pの計算に要するコストであり, 1ブロックあたり O(N)で k
評価される。
図 18に示した一連のデータ伸張処理は、図 18と等価なアルゴリズムのプログラム により、図 13に示したデコーダ 2Pを制御して実行出来る。このプログラムは、本発明 のデコーダ 2Pを構成するコンピュータシステムのプログラム記憶装置(図示省略)に 記憶させれば良い。又、このプログラムは、コンピュータ読取り可能な記録媒体に保 存し、この記録媒体をデコーダ 2Pのプログラム記憶装置に読み込ませることにより、 本発明の一連のデータ伸張処理を実行することができる。
[0112] 即ち、本発明の第 2の実施の形態の変形例に係るデータ伸張プログラムは、入力 情報が複数のブロック領域に等分割され、ブロック領域毎に入力情報のデータが圧 縮された圧縮データを伸張し、入力情報を推定するデコーダ 2Pに、
(a)圧縮データに対し逆符号ィヒ及び逆量子化を行い、逆量子化された量子化誤差 FQをブロック領域毎に得る命令;
(b)対象ブロック領域と、この対象ブロック領域に隣接するブロック領域とのブロック 境界にお 、て、対象ブロック領域における入力信号の傾きを相殺する傾き相殺関数
の DCT係数 UQを、逆量子化された量子化誤差 FQから計算する命令;
(c)傾き相殺関数の DCT係数 UQから量子化誤差 dを計算する命令;
(d)ブロック歪みを軽減する 2次曲面を隣接するブロック領域に加え、 2次曲面の D CT係数 PQを計算する命令;
(e)量子化誤差 dと 2次曲面の DCT係数 PQを用いて、逆量子化された量子化誤差 FQを補正し、入力信号の DCT係数のより良い近似を求める(入力信号の DCT係数 を近似的に推定する)命令;
(f)上記の入力信号の DCT係数のより良い近似 (近似的に推定された入力信号の DCT係数)から、入力信号をブロック領域毎に得る命令;
(g)ブロック領域毎の入力信号を互いに貼り合わせ、入力情報を推定する命令 とを含む一連の命令を実行させる。
[0113] ここで、「コンピュータ読取り可能な記録媒体」とは、第 1の実施の形態に係るデータ 圧縮プログラムで説明したような、コンピュータの外部メモリ装置、半導体メモリ、磁気 ディスク、光ディスク、光磁気ディスク、磁気テープなどのプログラムを記録することが できるような媒体などを意味する。
[0114] フルモード多重調和 ·局所コサイン変換 (PHLCT)を用いた第 1の実施の形態に係 るデータ圧縮'伸張システム、及びブロック歪み除去機能を有する部分モード多重調 和 ·局所コサイン変換 (PPHLCT)を用いた第 2の実施の形態の変形例に係るデータ 圧縮'伸張システムの性能を,定量的,視覚的,両面から従来技術に係る JPEG標準 方式のデータ圧縮'伸張システムの性能と比較して評価する。定量的評価には,以 下の 2種類の指標を用 、る。
[0115] (a)ピーク信号対ノイズ比(PSNR : Peak Signal to Noise Ratio):
rPSNRjは、 2乗誤差を入力信号のピーク値で正規ィ匕することによって得られる誤 差評価指標であり,次式で定義される:
[数 25]
201og10 ( max \fQ(x, y)\/RMSE
[0116] 上式の Ωは、一枚の画像全体を表す領域, fQは再構成画像データ, RMSE (root m ean- squared error)は原画像と再構成画像の 2乗平均平方根誤差を表す。単位は(d B)であり,その値が大きいほど,良好な結果とみなす。
[0117] (b)平均構造類似(MS SIM: mean Structural SIMiliarity):
画像情報に特有の幾何学的構造,即ち,一般に,一枚の画像は有限個のオブジェ タトから構成されていることに着目し,原画像と再構成画像の局所的な類似性に重み を付加した誤差評価指標である。 MSSIMの値が大きいほど良好な結果とみなし,そ の最大値は 1である。 PSNRと比較し,より視覚的評価に近い結果を与えるものと考 えられる。
[0118] 量子化時に必要となる量子化テーブルとしては,表 2に示す JPEG形式で最も標準 的に用いられる輝度用量子化テーブルを用 ヽる。
[表 2]
(表 2 )
¾ = o ¾ = 1 fc2 = 2 fca = 3 j¾¾ = 4 k'2 = 5 ¾ = 6 fc2 = T ki = 0 16 11 10 16 24 40 51 61 ki = 1 12 12 14 19 26 58 60 55 kt = 2 14 13 16 24 40 57 ω 56 kt - 3 14 1? 22 29 51 87 go 62 kt = 4 18 22 37 56 68 109 103 77 kt = S 24 35 55 64 SI 104 113 92 fci = 6 49 64 78 87 103 121 120 101 ki = 7 72 92 95 98 112 100 103 99
[0119] 又,符号化アルゴリズムには,ハフマン符号化アルゴリズムを用いている。試験用の 原画像としては,図 20 (a)に示すレナ (Lenna)及び図 20 (b)に示すバーバラ (Barbara )を使用する。レナ及びバーバラは、画像処理システムの性能評価に標準的に用いら れる原画像である。
[0120] 図 21 (a)は,横軸に符号ィ匕レート (ビットレート),縦軸に原画像を図 20 (a)に示す レナを用いた場合の MSSIMの値を、第 1の実施の形態(PHLCT)及び第 2の実施 の形態の変形例(PPHLCT)につ 、て、従来技術 (DCT)の場合の性能と比較して 示したものである。図 21 (a)において、「PHLCT」は第 1の実施の形態に係るデータ 圧縮'伸張システム、「PPHLCT」は第 2の実施の形態の変形例に係るデータ圧縮' 伸張システム、 「DCT」は従来技術に係る JPEG標準方式のデータ圧縮 ·伸張システ ムの性能を示す。この表記は、図 21 (b)、図 22 (a)、図 22 (b)、図 23 (a)及び図 23 ( b)等でも同様である。
[0121] 図 21 (b)は,横軸に符号ィ匕レート,縦軸に原画像としてレナを用いた場合の PSNR の値を、第 1の実施の形態 (PHLCT)及び第 2の実施の形態の変形例(PPHLCT) について、従来技術 (DCT)の場合の性能と比較して示したものである。図 21 (a)及 び図 21 (b)は、原画像レナの場合の同一の符号ィ匕レート (圧縮レート)に対する再構 成画像の精度を,第 1の実施の形態 (PHLCT)、第 2の実施の形態の変形例 (PPH LCT)及び従来技術 (DCT)につ 、て、定量的に評価して 、る。
[0122] 図 22 (a)は,横軸に符号ィ匕レート,縦軸に原画像を図 20 (b)に示すバーバラを用 いた場合の MSSIMの値を、第 1の実施の形態(PHLCT)及び第 2の実施の形態の 変形例(PPHLCT)につ 、て、従来技術 (DCT)の場合の性能と比較して示したもの である。図 22 (b)は,横軸に符号ィ匕レート,縦軸に原画像としてバーバラを用いた場 合の PSNRの値を、第 1の実施の形態 (PHLCT)及び第 2の実施の形態の変形例( PPHLCT)につ 、て、従来技術 (DCT)の場合の性能と比較して示したものである。 図 22 (a)及び図 22 (b)は、原画像バーバラの場合の同一の符号ィ匕レート (圧縮レー ト)に対する再構成画像の精度を,第 1の実施の形態 (PHLCT)、第 2の実施の形態 の変形例(PPHLCT)及び従来技術 (DCT)につ 、て、定量的に評価して 、る。
[0123] 図 21 (a) ,図 21 (b) ,図 22 (a)及び図 22 (b)の結果から次の 2点が読み取れる;
(a) PHLCTを適用した場合 MSSIM及び PSNRともに、従来技術に係る JPEG標 準方式のデータ圧縮 ·伸張システム力 の改善がみられる;
(b) PPHLCTを適用した場合 PSNRの値は、従来技術に係る JPEG標準方式のデ ータ圧縮'伸張システムからほとんど改善されて 、な 、が, MSSIMにつ 、ては低符
号ィ匕レート時に、従来技術に係る JPEG標準方式のデータ圧縮 ·伸張システムからの 改善がみられる。
[0124] 次に,図 23 (a)は,原画像レナの場合において、横軸に PSNR,縦軸に DCT(JPE G標準方式)に対する符号化レート (圧縮レート)の削減率をとり,第 1の実施の形態( PHLCT)及び第 2の実施の形態の変形例(PPHLCT)につ 、て、従来技術 (DCT) の場合の性能と比較して示したものであり、図 23 (b)は,原画像バーバラの場合にお いて、横軸に PSNR,縦軸に DCTCFPEG標準方式)に対する符号化レート (圧縮レ ート)の削減率をとり,第 1の実施の形態 (PHLCT)及び第 2の実施の形態の変形例( PPHLCT)につ 、て、従来技術 (DCT)の場合の性能と比較して示したものである。
[0125] 図 23 (a)及び図 23 (b)は,再構成画像力 SPSNRの意味で等価な精度を持っため に必要な符号ィ匕レート (圧縮レート)を,第 1の実施の形態 (PHLCT)及び第 2の実 施の形態の変形例(PPHLCT)につ 、て、従来技術 (DCT)の場合の性能と比較し て示したものである。削減率が高ければ,それだけ情報が節約されたものとみなせる 。単位は%で表示している。
[0126] 更に,視覚的評価として,符号ィ匕レート (圧縮レート) 0. 15bppにおける再構成画 像を図 24 (a)〜図 24 (f)に示す。図 24 (a)は、原画像レナの場合において、従来技 術に係る JPEG標準方式の DCTを適用した場合の PSNR= 28. 70dBにおける再 構成画像、図 24 (b)は、原画像レナの場合において、第 2の実施の形態の変形例( PPHLCT)を適用した場合の PSNR= 28. 89dBにおける再構成画像、図 24 (c)は 、原画像レナの場合において、第 1の実施の形態 (PHLCT)を適用した場合の PSN R= 29. 50dBにおける再構成画像を示す。
[0127] 一方、図 24 (d)は、原画像バーバラの場合において、通常の DCTCFPEG標準方 式)を適用した場合の PSNR= 23. 58dBにおける再構成画像、図 24 (e)は、原画 像バーバラの場合にぉ ヽて、第 2の実施の形態の変形例(PPHLCT)を適用した場 合の PSNR= 23. 70dBにおける再構成画像、図 24 (f)は、原画像バーバラの場合 において、第 1の実施の形態(PHLCT)を適用した場合の PSNR= 24. OldBにお ける再構成画像を示す。
[0128] 図 24 (a)〜図 24 (f)は、図 20 (a)に示すレナ及び図 20 (b)に示すバーバラの全体
の画像を、 0. 15bppで圧縮したものである力 図 24 (a)〜図 24 (f)では、視覚的比 較の材料として,画像全体ではなく,画像内で最も観測者の注意を引く顔の周囲の みを抽出して表示している。ブロック歪の軽減などは明らかであり,視覚的評価として も第 1及び第 2の実施の形態に係るデータ圧縮'伸張システムの、従来技術に係る JP EG標準方式のデータ圧縮 ·伸張システムに対する有利な効果は確認出来る。
[0129] 又、同様な視覚的評価として,符号ィ匕レート (圧縮レート) 0. 3bppにおける再構成 画像を図 25 (a)〜図 25 (f)に示す。図 25 (a)は、原画像レナの場合において、従来 技術に係る JPEG標準方式の DCTを適用した場合の PSNR= 32. 22dBにおける 再構成画像、図 25 (b)は、原画像レナの場合において、第 2の実施の形態の変形例 (PPHLCT)を適用した場合の PSNR= 32. 36dBにおける再構成画像、図 25 (c) は、原画像レナの場合において、第 1の実施の形態 (PHLCT)を適用した場合の PS NR= 32. 801dBにおける再構成画像を示す。
[0130] 一方、図 25 (d)は、原画像バーバラの場合において、通常の DCT (JPEG標準方 式)を適用した場合の PSNR= 25. 66dBにおける再構成画像、図 25 (e)は、原画 像バーバラの場合において、第 2の実施の形態の変形例(PPHLCT)を適用した場 合の PSNR= 25. 70dBにおける再構成画像、図 25 (f)は、原画像バーバラの場合 において、第 1の実施の形態(PHLCT)を適用した場合の PSNR= 26. 06dBにお ける再構成画像を示す。
[0131] 図 25 (a)〜図 25 (f)は、図 20 (a)に示すレナ及び図 20 (b)に示すバーバラの全体 の画像を、 0. 3bppで圧縮したものである力 図 25 (a)〜図 25 (f)では、視覚的比較 の材料として,画像全体ではなく,画像内で最も観測者の注意を引く顔の周囲のみ を抽出して表示している。ブロック歪の軽減などは明らかであり,視覚的評価としても 第 1及び第 2の実施の形態に係るデータ圧縮 ·伸張システムの、従来技術に係る JPE G標準方式のデータ圧縮 ·伸張システムに対する有利な効果は確認出来る。
[0132] (第 3の実施の形態)
第 1及び第 2の実施の形態に係るデータ圧縮'伸張システムでは,ブロック境界に おける原画像の傾きを境界条件とするポアソン方程式の解を用いた画像圧縮効果の 改善方法について述べてきた。第 1及び第 2の実施の形態に係るデータ圧縮'伸張
システム方法では, DCT係数の第 1行 ·列成分のみ力 きまる境界条件下でのポアソ ン方程式の近似解を用いるため,計算コストは小さく,アルゴリズムも比較的単純であ つた o
[0133] 一方,第 3の実施の形態に係るデータ圧縮'伸張システムでは,第 1行'列成分の みならず,更に高次の成分をも利用する導関数整合'局所コサイン変換 (DMLCT: Derivative Matching Local Cosine Transform)を用いたデータ圧縮 ·伸張方法を提供 する。第 1行 '列成分のみを用いる場合と比較し,計算コストは大きく,アルゴリズムも 複雑になるが,より高い圧縮効果を実現しうることを数値実験力も確認している。
[0134] 即ち、図 26に示すように、本発明の第 3の実施の形態に係るデータ圧縮 ·伸張シス テムは、送信側端末 5dと、送信側端末 5dから送られてきた圧縮データを伝送する伝 送路 32と、伝送路 32を介して送信側端末 5dから送られてきた圧縮された圧縮デー タを受信し、この圧縮データを伸張し、伸張された画像データを表示する受信側端末 6dとを備える基本構成においては、第 1の実施の形態に係るデータ圧縮'伸張シス テムと同様である。
[0135] 送信側端末 5dは、導関数整合 ·局所コサイン変換 (DMLCT)を用いたエンコーダ ld、撮像デバイス 11、信号処理回路 12、入力側フレームメモリ 13、送信回路 31,送 信側量子化テーブル記憶装置 18,送信側ハフマン符号テーブル記憶装置 19を備 える点で、第 1の実施の形態に係るデータ圧縮 ·伸張システムとは異なる。 DMLCT を用いたエンコーダ Idは、ブロック分割回路 14, DMLCT回路 37、量子化回路 16、 エントロピー符号ィ匕回路 17を備える。
[0136] 受信側端末 6dは、導関数整合.局所コサイン逆変換 (IDMLCT)を用いたデコー ダ 2d、出力側フレームメモリ 25、ディスプレイ 27、表示回路 26、受信回路 33、受信 側量子化テーブル記憶装置 29,受信側ハフマン符号テーブル記憶装置 28を備える 点で、第 1の実施の形態に係るデータ圧縮'伸張システムとは異なる。 IDMLCTを用 いたデコーダ 2dは、エントロピー復号化回路 21、逆量子化回路 22、 IDMLCT回路 38、ブロック貼り合わせ回路 24を備える。
[0137] 送信側端末 5dの撮像デバイス 11、信号処理回路 12、入力側フレームメモリ 13及 び受信側端末 6dの表示回路 26、ディスプレイ 27及び出力側フレームメモリ 25等は
、第 1及び第 2の実施の形態に係るデータ圧縮'伸張システムと同様で良いので重複 した説明を省略する。
[0138] 図 26において、入力側フレームメモリ 13から読み出された 1画面ずつの画像デー タは、エンコーダ Idへ転送される。エンコーダ Idにおいては、ブロック分割回路 14に より、 1画面の画像データ力JPEG方式の規格によって定められた 8 X 8画素の複数 のブロックに分割され(図 4参照。)、 DMLCT回路 37において、各ブロック毎に多値 画像データの圧縮処理が行われる。即ち、 DMLCT回路 37は、図 27 (a)に示すよう に、 1次元 DMLCT計算モジュール 371とテンソル積計算モジュール 372とを備える 。そして、 1次元 DMLCT計算モジュール 371は、入力画像の DCT係数計算モジュ ール (入力信号の DCT係数計算モジュール) 711と、上限設定モジュール 712と、第 1残差計算モジュール 713と、第 2残差計算モジュール 714とを備える。 DMLCT回 路 37は、ブロック分割回路 14から、 1画面の画像データを図 3に示すような 1ブロック 単位で取り込み、その画像データに対して導関数整合 ·局所コサイン変換 (DMLCT )を実行する(DMLCT回路 37の詳細は、後述する。 ) o
[0139] 量子化回路 16は、 DMLCT回路 37から供給された残差 V=F— Uの DCT係数を、 送信側量子化テーブル記憶装置 18に格納されて ヽる量子化しき!ヽ値を参照して量 子化する。量子化回路 16で得られた量子化係数は、ジグザグスキャンと言われる走 查順に取り出され、エントロピー符号ィ匕回路 17に入力される。エントロピー符号化回 路 17は、量子化回路 16にて量子化された DCT係数を、送信側ハフマン符号テープ ル記憶装置 19に格納されているハフマン符号を参照して可変長符号ィ匕することによ り、圧縮データをブロック単位で生成する。エントロピー符号ィ匕回路 17の生成したブ ロック単位の圧縮データは、送信回路 31を介して、伝送路 32に転送される。
[0140] 伝送路 32を介して送信側端末 5dから送られてきた圧縮データは、受信側端末 6d の受信回路 33が受信する。受信回路 33を介して入力された圧縮データは、 IDML CTを用いたデコーダ 2dのエントロピー復号ィ匕回路 21へ転送される。エントロピー復 号化回路 21は、受信回路 33を介して転送されてきたブロック単位の圧縮データを、 受信側ハフマン符号テーブル記憶装置 28に格納されて!ヽるハフマン符号を参照し て可変長復号ィ匕することにより、伸張データをブロック単位で生成する。逆量子化回
路 22は、エントロピー復号ィ匕回路 21の生成したブロック単位の伸張データを、受信 側量子化テーブル記憶装置 29に格納されて ヽる量子化しき!ヽ値を参照して逆量子 化することにより、 DCT係数を生成する。
[0141] IDMLCT回路 38は、図 27 (b)に示すように、テンソル展開モジュール 381と、 1次 元 IDMLCT計算モジュール 382とを備える。 1次元 IDMLCT計算モジュール 382 は、 1次元ブロック残差入力モジュール 821と、第 1補間多項式 DCT係数計算モジュ ール 822と、第 2補間多項式 DCT係数計算モジュール 823と、入力画像の DCT係 数近似'復元モジュール 824とを備える。 IDMLCT回路 38は、逆量子化回路 22の 生成した DCT係数に対して導関数整合 ·局所コサイン逆変換 (IDMLCT)を行う(ID MLCT回路 38の詳細は、後述する。 ) o IDMLCT回路 38にて導関数整合 ·局所コ サイン逆変換が行われたブロック単位の伸張データは、ブロック貼り合わせ回路 24で 貼り合わせられ、 1画面ずつのデータになる。
[0142] ブロック貼り合わせ回路 24で貼り合わせられた 1画面ずつのデータは、出力側フレ ームメモリ 25へ転送される。そして、出力側フレームメモリ 25は、デコーダ 2dから転 送されてきた 1画面ずつの画像データを書き込んで記憶する。又、表示回路 26は、 デコーダ 2dから転送されてきた 1画面ずつの画像データから画像信号を生成し、そ の画像信号はディスプレイ 27上で被写体画像として表示する。
DMLCT回路 37及び IDMLCT回路 38を説明する前に、 DMLCT回路 37の 1次 元 DMLCT計算モジュール 371及び IDMLCT回路 38の 1次元 IDMLCT計算モジ ユール 382で処理される 1次元信号を対象としたデータ圧縮 ·伸張方法について説 明する。 2次元の信号,即ち画像圧縮については, DMLCT回路 37のテンソル積計 算モジュール 372によって、 1次元信号に関する画像圧縮方法のテンソル積が計算 され、処理される。又、 2次元の信号の画像伸張については, IDMLCT回路 38のテ ンソル展開モジュール 381によって、テンソル積が 1次元信号に関する画像圧縮方 法に展開され、処理される。
[0143] 先ず、 1次元 DMLCT計算モジュール 371及び 1次元 IDMLCT計算モジュール 3 82での処理における数学的定式ィ匕を説明するに際し、区間 [0, 1]で定義された十 分滑らかな入力信号関数 x)を考える。区間 [0, 1]における入力信号関数 χ)の 1次
元 DCT係数は,次式で与えられる:
[数 26]
[0144] 右辺の級数項を,区間 [0, 1]上の Ν個のサンプリングデータによる x)cos kxの数値 積分とみなすと,
[数 27]
Fk =■ V¾V / f(x}c TTkxdx + O (JV— 3) , = 0, 1"·. ,N— 1.
Jo
[0145] 更に k>0の場合,右辺に部分積分を適用することによって次式を得る:
'2N fldf
f sin wkxdx + O (N 3) , Jfc = 1,…, N— L
[0146] 第 1及び第 2の実施の形態に係るデータ圧縮 ·伸張システムでは,端点のみで入力 信号関数 x)の傾き相殺関数 u(x)を考え,残差 V(X)= x)— u(x)の DCT係数
[数 29]
¾ =―—— ~ ~γ~(τ) sin πΜχ. ά + Ο (JV~3) t k ~ 1 , ... ¥ iV— 1 (16)
[0147] の収束速度が 0(k—4)となることを利用して圧縮効果の改善を試みた。第 1及び第 2の 実施の形態に係るデータ圧縮'伸張方法は,端点近傍でのギプス (Gibbs)現象の回
避方法として非常に有効であつたが,一方,残差の量子化誤差 Vに対する評価式( k
16)は,残差の量子化誤差 Vの値が端点のみならず内部の dv/dxOの振る舞いにも k
大きく依存することを示して 、る。
[0148] 第 3の実施の形態に係るデータ圧縮 ·伸張システムでは,新たな u成分として,区間
[0,1]上に等間隔に設定された両端点を含む n個の拘束点
[数 30] a;„ ,' := , i = 0, . .. , n— 1,
n -
[0149] においても入力信号関数 χ)の傾きを相殺する,即ち,条件
[数 31] i = 0, . . .,n— 1. (17)
[0150] を満足する n次補間多項式
[数 32]
) =ム^ (18)
[0151] を用いる。式(18)の右辺第 2項の cは適当な定数,右辺第 1項の L(x)は潘目のラグ ランジュ (Lagrange)多項式の原始関数
[0152] である。
[0153] 第 3の実施の形態に係るデータ圧縮 ·伸張システムにおける圧縮効果は,補間多
項式 u(x)の近似精度に依存する。厳密な精度評価は困難であるが,例えば
[数 34]
½. =一^■
5ΓΚ J f d(,— (x) sin nkx dx + O (Ν~Λ' )
o ax 、 '
= s o Π(- - ( ) ) sin 十。 3) '
[0154] を満足する (χ)≡ (0, 1)が存在することは容易に導かれる。
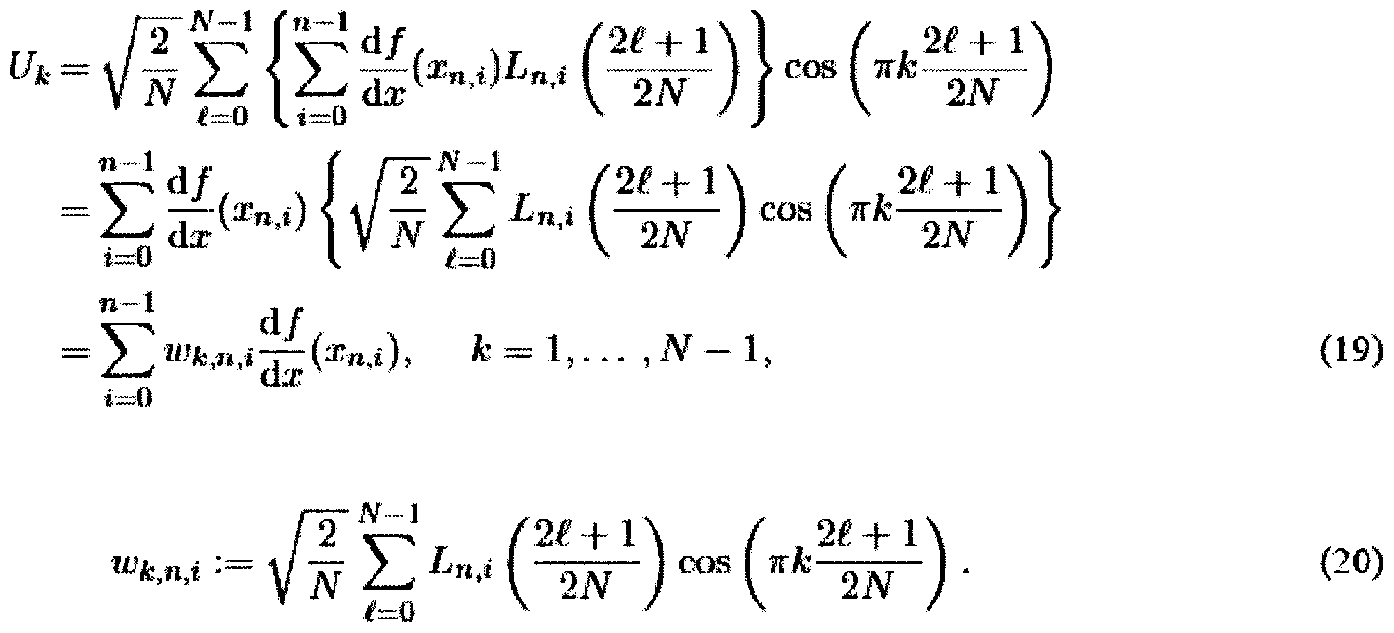
[0155] 第 1及び第 2の実施の形態に係るデータ圧縮 ·伸張システムの議論と同様に,実際 に残差の量子化誤差 Vを構成するためには,補間多項式 u(x)の DCT係数 U (k>0) k k が必要となる。関数 u(x)の定義式(18)より,補間多項式 u(x)の DCT係数 U は次式 k で与えられる:
[数 35]
ただし
[0156] 式 (20)に示した係数 w の値は,入力信号関数 x)とは無関係に計算可能である。
k,,
拘束点 X における導関数 df/dx(x )の計算に関しては,以下で述べるように,入力信 号関数 χ)の差分を適用する。先ず,入力信号関数 χ)の定義域を [0, 1]から [-1, 2] に拡張する。即ち,区間 [0, 1]だけでなくその周囲においても入力信号関数 χ)が定 義されているものとする。これに伴い X を次式で再定義する:
[数 36]
xn,i :■= r, i = -1,0, ..■ ,n― 1,
[0157] 拘束点における導関数の計算には,差分近似
[数 37]
[0159] である。上式の導出については, k=n— 1のとき
[数 39]
/ , ±1ヽ { 2i± 1\
となることからも明らかである。第 3の実施の形態に係るデータ圧縮 ·伸張システムで は,低次の DCT係数にのみ着目し,式(22)を以下のように近似する:
[0161] 即ち,式(21)の近似値として F , F 力もきまる
[数 41]
(24)
[0162] を用いる。ここで, F )及び F はそれぞれ区間 [-1, 0], [1, 2]における入力信号関
k k
数 x)の DCT係数を表す。更に式(24)を式(19)に代入することによって,補間多項 式 u(x)の DCT係数 Uに関して以下の近似式を得る:
k
[数 42]
(" - N∑ { - ) (F,― リ)
-2 sia
-1)
+
一
∑ {Kl ^ -
1》) + L + "i P ) (25) し
2(η - 1>ノ
- - 2(" ^ (i(¾)∑ ^ S5n { (i"一 1)
Μ,ϋ = (η一
[0163] 明らかに,係数 W^) , W(b) ,及び W^) は入力信号関数 x)とは無関係に計算可
k,n,j k,n,j k,n,j
能である。
[0164] 図 28に示すフローチャートを用いて、本発明の第 3の実施の形態に係る DMLCT 回路 37を用いたデータ圧縮方法を説明する。なお、以下に述べるデータ圧縮方法 は、一例であり、この変形例を含めて、これ以外の種々の方法により、実現可能であ ることは勿論である。
(a) DMLCT回路 37の 1次元 DMLCT計算モジュール 371は、ステップ S501にお いて、図 29 (a)に示すように、対象となる中央の 1次元データブロック、及び対象とな る 1次元データブロックの上下に隣接する 2つの 1次元データブロックの各々に信号 を入力する。そして、それぞれの 1次元データブロックに DCT処理を適用し、図 29 (b )に示すように、対象となる中央の 1次元データブロック、及び対象となる 1次元データ ブロックの上下に隣接する 2つの 1次元データブロックのそれぞれに対する入力画像 の量子化誤差 (入力信号の量子化誤差) Fを計算する。
[0165] (b) DMLCT回路 37の上限設定モジュール 712は、ステップ S502において、拘束 点の個数 nに上限 n (バー)を設ける。上限 n (バー)を設けるのは、経験的に,効果的 な nはそれほど大きくなく,又, nを大きくするに従って計算コストが過大となるためで ある。なお、本明細書では、 n (バー)は、
[数 43] n
[0166] を意味する。
[0167] (c) DMLCT回路 37の第 1残差計算モジュール 713は、式(25)を用いて、図 29 ( c)に示すように、補間多項式 u(x)の DCT係数 Uを求める。そして、ステップ S503に
k
おいて、
[数 44]
1* = I, . . . , η— 1 [0168] に対し、図 29 (c)に示すように、残差
[数 45]
[0169] を計算する。
[0170] (d)その後、 DMLCT回路 37の第 2残差計算モジュール 714は、ステップ S504に おいて、
[数 46] fc = IT,…, JV— 1
[0171] に対し、残差
[数 47]
[0172] を計算する。
[0173] (e) DMLCT回路 37のテンソル積計算モジュール 372は、ステップ S506において 、図 29 (e)に示すように、テンソル積により 2次元 DCTを計算する。ステップ S506に おける 2次元 DCTの計算は,入力された 2次元信号に対し,例えば、図 29 (b)のよう に、 1次元 DCTを垂直方向に適用した場合は、得られた 1次元 DCT係数に対し,更 に水平方向に 1次元 DCT処理を適用することによって実現出来る。一方、 1次元 DC Tを水平方向に適用した場合は、得られた 1次元 DCT係数に対し,更に垂直方向に 1次元 DCT処理を適用することによって実現出来る。図 29 (e)に示した残差 V=F— Uは、エンコーダ Idの量子化回路 16に出力される。
[0174] (f)量子化回路 16及びエントロピー符号化回路 17における量子化及び符号化の 処理は、第 1の実施の形態に係るデータ圧縮方法と同様であり、重複した説明を省 略する。エントロピー符号ィ匕回路 17の生成したブロック単位の圧縮データは、送信回 路 31を介して、伝送路 32に転送される。
[0175] 図 28に示した一連のデータ圧縮処理は、図 28と等価なアルゴリズムのプログラム により、図 26に示したエンコーダ Idを制御して実行出来る。このプログラムは、本発 明のェンコーダ 1 dを構成するコンピュータシステムのプログラム記憶装置(図示省略 )に記憶させれば良い。又、このプログラムは、コンピュータ読取り可能な記録媒体に 保存し、この記録媒体をエンコーダ Idのプログラム記憶装置に読み込ませることによ り、本発明の一連のデータ圧縮処理を実行することができる。ここで、「コンピュータ読 取り可能な記録媒体」とは、例えばコンピュータの外部メモリ装置、半導体メモリ、磁 気ディスク、光ディスク、光磁気ディスク、磁気テープなどのプログラムを記録すること ができるような媒体などを意味する。例えば、エンコーダ Idの本体は、フレキシブル ディスク装置 (フレキシブルディスクドライブ)及び光ディスク装置 (光ディスクドライブ) を内蔵若しくは外部接続するように構成出来る。フレキシブルディスクドライブに対し てはフレキシブルディスクを、又光ディスクドライブに対しては CD— ROMをその挿入 口から挿入し、所定の読み出し操作を行うことにより、これらの記録媒体に格納された プログラムをエンコーダ Idを構成するプログラム記憶装置にインストールすることがで きる。更に、インターネット等の情報処理ネットワークを介して、このプログラムをプログ ラム記憶装置に格納することが可能である。
[0176] 図 30に示すフローチャートを用いて、本発明の第 3の実施の形態に係る IDMLCT 回路 38を用いたデータ伸張方法を説明する。なお、以下に述べるデータ伸張方法 は、一例であり、この変形例を含めて、これ以外の種々の方法により、実現可能であ ることは勿論である。
[0177] (a)デコーダ 2dのエントロピー復号化回路 21及び逆量子化回路 22における復号 化及び逆量子化の処理は、第 1の実施の形態に係るデータ圧縮方法と同様であり、 重複した説明を省略する。残差 Vの量子化誤差 V Qは、 IDMLCT回路 38のテンソル
k
展開モジュール 381に転送される。
[0178] (b) IDMLCT回路 38のテンソル展開モジュール 381は、ステップ S601において、 図 31 (a)の 2次元のテンソル積の残差 V Qから 1次元の残差 V Qに展開される。 1次元
k k
に展開された残差 Vは、図 31 (b)に示すように、対象となる中央の 1次元データプロ
k
ック、及び対象となる 1次元データブロックの上下に隣接する 2つの 1次元データブロ
ックの各々の画素の位置に入力される。
(c) IDMLCT回路 38の第 1補間多項式 DCT係数計算モジュール 822は、式(25 )を用いて、図 31 (c)に示すように、補間多項式 u(x)の DCT係数 U (')Qを求める。 U (n
k k
)Qは,式(25)において Fを F Qで置き換えたものである。そして、ステップ S602にお
k k
いて、
[数 48] k = 1 ,… , ϊΐ— 1
[0179] に対し、図 31 (d)に示すように、順次、
[数 49] if = u^÷ 十 i
[0180] を計算する。したがって,
[数 50]
Q
η,- η—ί
[0181] と順次復元することができる。
[0182] (d)その後、 IDMLCT回路 38の第 2補間多項式 DCT係数計算モジュール 823は 、ステップ S603において、
[数 51]
[0183] に対し、
[数 52]
= + yQ
[0184] を計算する。
[0185] (e)更に、入力画像の DCT係数近似 ·復元モジュール 824は、ステップ S604にお いて、 F Q〖こ対し,ブロック毎に IDCT処理を適用し、多値画像データを復元する。
k
[0186] (f)デコーダ 2dのブロック貼り合わせ回路 24は、 IDCT処理の結果得られた多値画 像データを用いて、各ブロックを貼り合わせる。ブロック貼り合わせ回路 24で貼り合わ せられた 1画面ずつのデータは、出力側フレームメモリ 25へ転送される。
[0187] 図 30に示した一連のデータ圧縮処理は、図 30と等価なアルゴリズムのプログラム により、図 26に示したデコーダ 2dを制御して実行出来る。このプログラムは、本発明 のデコーダ 2dを構成するコンピュータシステムのプログラム記憶装置(図示省略)に 記憶させれば良い。又、このプログラムは、コンピュータ読取り可能な記録媒体に保 存し、この記録媒体をデコーダ 2dのプログラム記憶装置に読み込ませることにより、 本発明の一連のデータ圧縮処理を実行することができる。ここで、「コンピュータ読取 り可能な記録媒体」とは、例えばコンピュータの外部メモリ装置、半導体メモリ、磁気 ディスク、光ディスク、光磁気ディスク、磁気テープなどのプログラムを記録することが できるような媒体などを意味する。例えば、デコーダ 2dの本体は、フレキシブルデイス ク装置 (フレキシブルディスクドライブ)及び光ディスク装置 (光ディスクドライブ)を内 蔵若しくは外部接続するように構成出来る。フレキシブルディスクドライブに対しては フレキシブルディスクを、又光ディスクドライブに対しては CD— ROMをその挿入口 から挿入し、所定の読み出し操作を行うことにより、これらの記録媒体に格納されたプ ログラムをデコーダ 2dを構成するプログラム記憶装置にインストールすることができる
。更に、インターネット等の情報処理ネットワークを介して、このプログラムをプログラム 記憶装置に格納することが可能である。
[0188] 第 3の実施の形態に係るデータ圧縮.伸張システムの性能を,ポアソン方程式の解 を用いた場合である第 1の実施の形態に係るデータ圧縮 ·伸張システムと比較する。 図 32 (a)は、原画像レナの場合において、横軸に PSNR,縦軸に第 1の実施の形態 に係るデータ圧縮'伸張システム (PHLCT)及び第 3の実施の形態に係るデータ圧 縮 ·伸張システム (DMLCT)の符号化レート (圧縮レート)の削減率を示したものであ る。一方、図 32 (b)は、原画像バーバラの場合において、横軸に PSNR,縦軸に第 1 の実施の形態に係るデータ圧縮'伸張システム (PHLCT)及び第 3の実施の形態に 係るデータ圧縮 ·伸張システム (DMLCT)の符号化レート (圧縮レート)の削減率を 示したものである。第 3の実施の形態に係るデータ圧縮'伸張システムの拘束点の個 数 nの上限 n (バー)としては, n (バー) =2, 3, 4の 3通りについて、図 32 (a)及び図 3 2 (b)では、 DMLCT(n)と表記している。第 1の実施の形態に係るデータ圧縮'伸張 システム (PHLCT)と比較して第 3の実施の形態に係るデータ圧縮'伸張システム(D MLCT)は計算コストは大きく,アルゴリズムも複雑になるが,より高い圧縮効果を実 現しうることが確認出来る。
[0189] (その他の実施の形態)
上記のように、本発明は第 1〜第 3の実施の形態によって記載した力 この開示の 一部をなす論述及び図面は本発明を限定するものであると理解すべきではない。こ の開示力 当業者には様々な代替実施の形態、実施例及び運用技術が明らかとな ろう。
[0190] 既に述べた第 1〜第 3の実施の形態の説明においては、 JPEGアルゴリズムを用い た静止画の圧縮 ·伸張技術に関して例示したが、本発明は静止画の圧縮 ·伸張技術 に限定されるものではなぐ MPEGアルゴリズム等を用いた動画の圧縮 ·伸張技術に も適用可能であることは勿論である。更に、本発明は画像の圧縮,伸張技術に限定さ れるものではなぐハイファイオーディオ力 電話音声に至る音声データの圧縮 '伸張 技術にも適用可能である。音声データの圧縮,伸張技術においては、音声の周波数 を考慮すれば良 、ので、 1次元のデータの圧縮 ·伸張を行えば良 、。
[0191] 又、第 1〜第 3の実施の形態の説明においては、送信側端末 5, 5P, 5dと、送信側 端末 5, 5P, 5dから送られてきた圧縮データを伝送する伝送路 32と、伝送路 32を介 して送信側端末 5から送られてきた圧縮データを受信し、この圧縮データを伸張し、 伸張された画像データを表示する受信側端末 6, 6P, 6dとを備える構成で説明した 力、電子スチルカメラのように、エンコーダ 1, lp, Idとデコーダ 2, 2p, 2dとを同一の 装置内に内蔵する電子機器でも構わな 、。
[0192] 図 33に示すように、本発明の他の実施の形態に係る電子機器 (電子スチルカメラ) は、 JPEG方式を用いたエンコーダ 1、デコーダ 2、制御コア回路 3、撮像デバイス 11 、信号処理回路 12、フレームメモリ(第 1の記憶装置) 13c、ディスプレイ 27、表示回 路 26、メモリカード (第 2の記憶装置) 53、 RAM54、入出力回路 55、データノ ス 51 , 52から構成されている。例えば、エンコーダ 1、デコーダ 2、制御コア回路 3、信号 処理回路 12、フレームメモリ(第 1の記憶装置) 13c、表示回路 26、データバス 51, 5 2、 RAM54等の少なくとも一部を同一半導体チップに集積させた構造でも良い。
[0193] エンコーダ 1は、第 1の実施の形態に係るデータ圧縮'伸張システムと同様に、プロ ック分割回路 14, PHLCT回路 15、量子化回路 16、エントロピー符号ィ匕回路 17を 備え、デコーダ 2も、第 1の実施の形態に係るデータ圧縮 ·伸張システムと同様に、ェ ントロピー復号化回路 21、逆量子化回路 22、逆 PHLCT(IPHLCT)回路 23、ブロ ック貼り合わせ回路 24を備える。
[0194] 撮像デバイス 11、信号処理回路 12、フレームメモリ(第 1の記憶装置) 13c、表示回 路 26、ディスプレイ 27等は、基本的に第 1の実施の形態に係るデータ圧縮 ·伸張シ ステムと同様である力 信号処理回路 12の生成した 1画面ずつの画像データは、デ ータバス 51を介して、フレームメモリ(第 1の記憶装置) 13c又は表示回路 26の少なく ともいずれかへ転送される。表示回路 26は、データバス 51を介して転送されてきた 1 画面ずつの画像データから画像信号を生成する。ディスプレイ 27は、表示回路 26の 生成した画像信号を被写体画像として表示する。フレームメモリ(第 1の記憶装置) 13 cは書き換え可能な半導体メモリ(例えば、 SDRAM, DRAM,ラムバス DRAM等) から構成され、データバス 51を介して転送されてきた 1画面(1フレーム)毎の画像デ ータを書き込んで記憶すると共に、記憶した画像データを 1画面ずつ読み出す。フレ
ームメモリ(第 1の記憶装置) 13cから読み出された 1画面ずつの画像データは、デー タバス 51を介してエンコーダ 1へ転送される。エンコーダ 1においては、ブロック分割 回路 14により、 1画面の画像データ力JPEG方式の規格によって定められた複数の マクロブロックに分割され、その各ブロック毎に圧縮 ·伸張処理が行われる。
[0195] PHLCT回路 15の詳細な構成の図示は省略するが、第 1の実施の形態に係るデ ータ圧縮'伸張システムと同様に、入力画像の DCT係数計算モジュール (入力信号 の DCT係数計算モジュール) 151、第 1相殺関数 DCT係数計算モジュール 152、第 2相殺関数 DCT係数計算モジュール 153及び残差計算モジュール 154を備え、ブ ロック分割回路 14から、 1画面の画像データをブロック単位で取り込み、その画像デ ータに対して多重調和'局所コサイン変換 (PHLCT)を実行し、残差 V=F— Uの量 子化誤差 Vを出力する。量子化回路 16やエントロピー符号化回路 17は、第 1の実 k
施の形態に係るデータ圧縮 ·伸張システムと同様に RAM18cに記憶された量子化テ 一ブルに格納されている量子化しきい値及び RAM19cに記憶されたハフマンテー ブルに格納されて ヽるハフマン符号を参照して量子化及び符号ィ匕を行う。エントロピ 一符号ィ匕回路 17の生成したブロック単位の圧縮データは、データバス 52を介して、 メモリカード (第 2の記憶装置) 53又は入出力回路 55の少なくともいずれかへ転送さ れる。メモリカード (第 2の記憶装置) 53は電子スチルカメラに対して着脱可能に装着 されており、メモリカード (第 2の記憶装置) 53内にはフラッシュメモリ 53mが設けられ ている。フラッシュメモリ 53mは、データバス 52を介して転送されてきた 1画面ずつの 圧縮データを書き込んで記憶すると共に、記憶した圧縮データを 1画面ずつ読み出 してデータバス 52へ転送する。入出力回路 55は、データバス 52を介して転送されて きた 1画面ずつの圧縮データを、電子スチルカメラに接続された、外部ディスプレイ、 パーソナルコンピュータ、プリンタ、等の外部機器へ出力すると共に、外部機器から 入力された圧縮データをデータバス 52へ転送する。
[0196] メモリカード (第 2の記憶装置) 53から読み出された圧縮データ又は入出力回路 55 を介して入力された圧縮データは、データバス 52を介してデコーダ 2のエントロピー 復号化回路 21へ転送される。エントロピー復号ィ匕回路 21は、データバス 52を介して 転送されてきたブロック単位の圧縮データを、 RAM 19cに記憶されたハフマンテー
ブルに格納されているハフマン符号を参照して可変長復号ィ匕することにより、伸張デ ータをブロック単位で生成する。逆量子化回路 22は、エントロピー復号ィ匕回路 21の 生成したブロック単位の伸張データを、 RAM18cに記憶された量子化テーブルに格 納されている量子化しきい値を参照して逆量子化することにより、残差 V=F— Uの逆 量子化された量子化誤差 V Qを生成する。逆 PHLCT回路 23は、逆量子化回路 22
k
の生成した逆量子化された量子化誤差 V Qに対して 2次元の多重調和 ·局所コサイン
k
逆変換 (IPHLCT)を行う。逆 PHLCT回路 23にて IPHLCTが行われたブロック単 位の伸張データは、ブロック貼り合わせ回路 24で貼り合わせられ、 1画面ずつのデー タになる。ブロック貼り合わせ回路 24で貼り合わせられた 1画面ずつのデータは、デ ータバス 51を介してフレームメモリ(第 1の記憶装置) 13cへ転送される。そして、フレ ームメモリ(第 1の記憶装置) 13cは、逆 PHLCT回路 23からデータバス 51を介して 転送されてきた 1画面ずつの画像データを書き込んで記憶する。又、表示回路 26は 、デコーダ 2からデータノ ス 51を介して転送されてきた 1画面ずつの画像データから 画像信号を生成し、その画像信号はディスプレイ 27上で被写体画像として表示され る。
[0197] なお、図 33に示した電子スチルカメラの構成において、第 2の実施の形態に係るデ ータ圧縮'伸張システムと同様に、エンコーダ 1を JPEG標準方式とし、デコーダ 2に のみ多重調和 ·局所コサイン逆変換を適用して、部分モードのデータ圧縮 ·伸張シス テムとすることも可能である。
[0198] 図 34に示すように、本発明の更に他の実施の形態に係る電子スチルカメラは、導 関数整合.局所コサイン変換 (DMLCT)を用いたエンコーダ ld、導関数整合'局所 コサイン逆変換 (IDMLCT)を用いたデコーダ 2d、制御コア回路 3、撮像デバイス 11 、信号処理回路 12、フレームメモリ(第 1の記憶装置) 13c、ディスプレイ 27、表示回 路 26、メモリカード (第 2の記憶装置) 53、 RAM54、入出力回路 55、データノ ス 51 , 52から構成されている。
[0199] エンコーダ Idは、第 3の実施の形態に係るデータ圧縮 ·伸張システムと同様に、ブ ロック分割回路 14, DMLCT回路 37、量子化回路 16、エントロピー符号化回路 17 を備え、デコーダ 2dも、第 3の実施の形態に係るデータ圧縮 ·伸張システムと同様に
、エントロピー復号化回路 21、逆量子化回路 22、 IDMLCT回路 38、ブロック貼り合 わせ回路 24を備える。 DMLCT回路 37及び IDMLCT回路 38の詳細は、第 3の実 施の形態に係るデータ圧縮 ·伸張システムで説明した通りであり、それらの詳細な構 成やブロック図に示した他の構成の説明は図 33に示した電子スチルカメラの説明か ら理解可能であるので重複した説明は省略する。図 34に示すような、 DMLCT回路 37、 IDMLCT回路 38を用いた構成とすることにより、図 33に示すポアソン方程式の 解を用いた PHLCTZIPHLCT方式の場合に比し、計算コストは大きく,ァルゴリズ ムも複雑になるが,より高い圧縮効果を実現出来る。
[0200] この様に、本発明はここでは記載して 、な 、様々な実施の形態等を含むことは勿 論である。したがって、本発明の技術的範囲は上記の説明力 妥当な特許請求の範 囲に係る発明特定事項によってのみ定められるものである。
産業上の利用の可能性
[0201] 本発明の電子機器、データ圧縮方法、データ伸張方法、データ圧縮プログラム及 びデータ伸張プログラムは、画像データや音声データを含む種々の情報の圧縮 '伸 張処理技術を用いるテレビ電話、インターネット電話等の電子機器の製造業を含む インターネット 'イントラネット関連産業に利用可能である。
[0202] この他、本発明の電子機器、データ圧縮方法、データ伸張方法、データ圧縮プログ ラム及びデータ伸張プログラムは、画像データや音声データを含む種々の情報の圧 縮 ·伸張処理技術を用いる、映画や DVDなどのマルチメディア産業、更には、携帯 電話、コピー機、ファクシミリ、プリンタ等の電子機器産業に利用可能である。