US7515141B2 - Coordinate input apparatus, control method therefor, and program - Google Patents
Coordinate input apparatus, control method therefor, and program Download PDFInfo
- Publication number
- US7515141B2 US7515141B2 US11/398,936 US39893606A US7515141B2 US 7515141 B2 US7515141 B2 US 7515141B2 US 39893606 A US39893606 A US 39893606A US 7515141 B2 US7515141 B2 US 7515141B2
- Authority
- US
- United States
- Prior art keywords
- shadows
- unit
- angle
- sensor unit
- optical
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related, expires
Links
Images


























Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/042—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means
- G06F3/0421—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means by interrupting or reflecting a light beam, e.g. optical touch-screen
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/0416—Control or interface arrangements specially adapted for digitisers
- G06F3/04166—Details of scanning methods, e.g. sampling time, grouping of sub areas or time sharing with display driving
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/042—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means
- G06F3/0421—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means by interrupting or reflecting a light beam, e.g. optical touch-screen
- G06F3/0423—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means by interrupting or reflecting a light beam, e.g. optical touch-screen using sweeping light beams, e.g. using rotating or vibrating mirror
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B5/00—Optical elements other than lenses
- G02B5/12—Reflex reflectors
- G02B5/122—Reflex reflectors cube corner, trihedral or triple reflector type
- G02B5/124—Reflex reflectors cube corner, trihedral or triple reflector type plural reflecting elements forming part of a unitary plate or sheet
Definitions
- the present invention relates to a coordinate input apparatus configured to detect a pointed position on a coordinate input region, a control method adapted to control the coordinate input apparatus, and a program adapted to perform the control method.
- coordinate input apparatuses used to input coordinates designated by pointers (for example, a dedicated inputting pen, and a finger) to control computers connected thereto and to write characters, graphics, and so on.
- touch panels have been proposed or become commercially available as the coordinate input apparatuses of this kind.
- the touch panels are widely used because operations of terminals, such as a personal computer, can easily be directed on the screen without using special instruments.
- U.S. Pat. No. 4,507,557 discusses a coordinate input method using light and also discusses the following configuration. That is, a retroreflecting sheet is provided outside a coordinate input region. Illumination units configured to illuminate objects with light, and light-receiving units configured to receive light are disposed at corner ends of the coordinate input region. The angle between a shielding object, such as a finger, which shields light in the coordinate input region, and each of the light receiving units is detected by using the illumination unit and the light receiving unit. According to results of the detection, the pointed position of the shielding object is determined.
- Japanese Patent Application Laid-Open Nos. 2000-105671 and 2001-142642 discuss coordinate input apparatuses each of which has a retroreflecting member configured around a coordinate input region, and which detects the coordinates of a part (light-shielded part), at which retroreflected light is shielded.
- the apparatus discussed in Japanese Patent Application Laid-Open No. 2000-105671 detects a peak of the intensity of light received by the light-receiving unit, which peak appears at a position corresponding to a light-shielded part and is caused by a shielding object, by performing a computing operation, such as a differentiation, on waveforms.
- this apparatus detects the angle of the light-shielded part with respect to the light-receiving unit. Then, this apparatus calculates the coordinates of the shielding object according to a detection result.
- the apparatus discussed in Japanese Patent Application Laid-Open No. 2001-142642 detects one end and the other end of a light-shielded part by comparison with a specific level pattern, and then detects the center of these coordinates.
- Japanese Patent Application Laid-Open Nos. 2002-055770 and 2003-303046, and Japanese Patent Registration No. 2896183 discuss techniques of detecting angles of a plurality of light-shielded parts by each single light-receiving sensor, calculating several input coordinate candidates from a combination of the angles detected by each of the sensors, and further detecting actual inputted coordinates from the input coordinate candidates that have resulted from a contemporaneously input of a plurality of coordinates.
- the coordinates of four points are calculated at a maximum as input coordinate candidates.
- two points, the coordinates of which are actually inputted are determined, so that the coordinates of the two points are outputted. That is, this determination is to discriminate actual input coordinates from false input coordinates among a plurality of input coordinate candidates, and to subsequently determine final input coordinates.
- this determination is referred to as “true or false determination.”
- first and second sensors are provided at both ends of one side of a conventional coordinate input region to be spaced apart by a distance sufficient to precisely calculate coordinates of a pointed position within the coordinate input region.
- a third sensor is provided at a position between the first and second sensors to also be spaced apart from the first and second sensors by a distance sufficient to precisely calculate coordinates of a pointed position within the coordinate input region.
- angle information from the third sensor which information differs from angle information from each of the first and second sensors, the true or false determination is made on a plurality of pieces of angle information, which are detected by the first and second sensors.
- a method of disposing a plurality of sensor units around a coordinate input region at predetermined intervals and causing the plurality of sensor units to observe substantially the same direction and substantially the same region has been discussed to reduce the chance of, even when a plurality of light-shielded shadows overlap, one of the shadows from being detected to be completely hidden in the other shadow. Also, a method of detecting, when a plurality of shadows overlap, a direction, in which each of the shadows is present, by observing one of end portions of each of the shadows has been discussed.
- the coordinate input apparatuses according to the aforementioned light shielding methods essentially can detect four coordinate candidate points that include two real images and two virtual images, for example, in a case where two input operations are concurrently performed, regardless of the configurations of the apparatuses.
- the methods discussed in Japanese Patent Application Laid-Open No. 2003-303046 and Japanese Patent Registration No. 2896183 have drawbacks in that the field of view of the third sensor is insufficient to stably perform a true or false determination, that it can be difficult due to constraints on the apparatus to install the third sensor by sufficiently securing the field of view to always perform a true or false determination without an error, and that in a case where a fourth sensor is additionally provided to supplement the field of view that the third sensor does not sufficiently assure, an operation of matching detection values obtained by the sensors is complicated.
- the apparatus can detect erroneous coordinates of a position that can be difficult unlikely in normal conditions.
- An exemplary embodiment is directed to a coordinate input apparatus capable of detecting a plurality of concurrently inputted coordinates with good accuracy, to a control method adapted to control the coordinate input apparatus, and a program adapted to implement the control method.
- a coordinate input apparatus which is configured to detect a position pointed on a coordinate input region, includes first and second sensor units, each associated with one end of an edge of the coordinate input region, where the first and second sensor units each have at least two optical units, wherein the at least two optical units includes a light projecting unit configured to project light onto the coordinate input region and a light receiving unit configured to receive incoming light, a detection unit configured to detect angle information representing directions of shadows, which are areas light-shielded by pointing performed by two pointing means, according to a light amount distribution, which is obtained from the optical units of the first and second sensor units, on the region including the shadows, and a calculation unit configured to calculate coordinates of positions pointed by the two pointing means by using 1) a combination of pieces of angle information on the shadows detected by a combination of the optical units of the different sensor units, and 2) a combination of pieces of angle information on the shadows detected by a combination of the optical units of a same sensor unit.
- a method of controlling a coordinate input apparatus configured to detect a position pointed on a coordinate input region by using first and second sensor units, each associated with one end of an edge of one side of the coordinate input region, wherein the first and second sensor units each have at least two optical units, wherein the at least two optical units including a light projecting unit configured to project light onto the coordinate input region and a light receiving unit configured to receive incoming light, includes a detection step of detecting angle information representing directions of shadows, which are areas light-shielded by pointing performed by two pointing means, according to a light amount distribution, which is obtained from the optical units of the first and second sensor units, on the region including the shadows, and a calculation step of calculating coordinates of positions pointed by the two pointing means by using 1) a combination of pieces of angle information on the shadows detected by a combination of the optical units of the different sensor units and 2) a combination of pieces of angle information on the shadows detected by a combination of the optical units of a same sensor unit
- program configured to implement control of a coordinate input apparatus configured to detect a position pointed on a coordinate input region by using first and second sensor units.
- the first and second sensor units are provided in the vicinity of an associated end of both ends of one side of the coordinate input region and has two optical units including a light projecting unit configured to project light onto the coordinate input region.
- a light receiving unit configured to receive incoming light
- a program code configured to perform a detection step of detecting angle information representing directions of shadows, which are areas light-shielded by pointing performed by two pointing means, according to a light amount distribution.
- the light amount is obtained from the optical units of the first and second sensor units, on the region including the shadows, using a program code configured to perform a calculation step of calculating coordinates of positions pointed by the two pointing means by using 1) a combination of pieces of angle information on the shadows detected by a combination of the optical units of the different sensor units and 2) a combination of pieces of angle information on the shadows detected by a combination of the optical units of a same sensor unit.
- At least one exemplary embodiment is directed to a coordinate input apparatus capable of detecting a plurality of concurrently inputted coordinates with good accuracy, and also provides a control method adapted to control the coordinate input apparatus, and a program adapted to implement the control method.
- FIG. 1 is a view illustrating the external appearance of a coordinate input apparatus according to a first exemplary embodiment of the present invention
- FIG. 2 is a view illustrating a configuration of a sensor unit according to the first exemplary embodiment in detail
- FIG. 3A is a view illustrating an optical configuration of a sensor unit according to the first exemplary embodiment
- FIG. 3B is a view illustrating an optical configuration of a sensor unit according to the first exemplary embodiment
- FIG. 3C is a view illustrating an optical configuration of a sensor unit according to the first exemplary embodiment
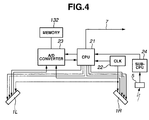
- FIG. 4 is a view illustrating a configuration of a control/arithmetic unit according to the first exemplary embodiment in detail
- FIG. 5 is an explanatory view illustrating an optical configuration of the coordinate input apparatus according to the first exemplary embodiment
- FIG. 6 is a flowchart illustrating a coordinate calculation process performed by the coordinate input apparatus according to the first exemplary embodiment
- FIG. 7 is an explanatory view illustrating a coordinate calculation method according to the first exemplary embodiment
- FIGS. 8A and 8B are graphs illustrating light intensity distributions obtained from sensor units by performing input operations illustrated in FIG. 7 ;
- FIG. 9 is an explanatory view illustrating a coordinate calculation method according to the first exemplary embodiment
- FIG. 10 is an explanatory view illustrating a coordinate calculation method according to the first exemplary embodiment
- FIG. 11 is an explanatory view illustrating a coordinate calculation method according to the first exemplary embodiment
- FIG. 12 is an explanatory view illustrating a coordinate calculation method according to the first exemplary embodiment
- FIGS. 13A and 13B are graphs illustrating light intensity distributions obtained from sensor units by performing input operations illustrated in FIGS. 11 and 12 ;
- FIG. 14 is an explanatory view illustrating a coordinate calculation method according to the first exemplary embodiment
- FIG. 15 is an explanatory view illustrating a coordinate calculation method according to the first exemplary embodiment
- FIG. 16 is an explanatory view illustrating a coordinate calculation method according to the first exemplary embodiment
- FIG. 17 is an explanatory view illustrating a coordinate calculation method according to the first exemplary embodiment
- FIGS. 18A and 18B are graphs illustrating light intensity distributions obtained from sensor units by performing input operations illustrated in FIGS. 14 and 15 ;
- FIG. 19 is an explanatory view illustrating a coordinate calculation method according to the first exemplary embodiment
- FIG. 20 is an explanatory view illustrating a coordinate calculation method according to the first exemplary embodiment
- FIG. 21 is an explanatory view illustrating a coordinate calculation method according to the first exemplary embodiment
- FIG. 22 is a flowchart illustrating a coordinate calculation process in a detection state [ 2 ] of the first exemplary embodiment in detail;
- FIG. 23 is a flowchart illustrating a coordinate calculation process in a detection state [ 2 ] of a second exemplary embodiment of the present invention in detail;
- FIG. 24 is an explanatory view illustrating a coordinate calculation method according to the second exemplary embodiment.
- FIG. 25 is an explanatory view illustrating a coordinate calculation method according to the second exemplary embodiment.
- any specific values, for example an angular range of view are not limited by the values in the examples. Thus, other examples of the exemplary embodiments could have different values.
- FIG. 1 is a view illustrating the external appearance of a coordinate input apparatus according to a first exemplary embodiment of the present invention.
- reference numerals 1 L and 1 R designate sensor units, each of which has a light projecting unit and a light receiving unit.
- the sensor units 1 L and 1 R are disposed along a line generally parallel to an X-axis of a coordinate input effective region 3 serving as a coordinate input surface, as illustrated in this figure.
- the sensor units 1 L and 1 R are also disposed at the positions symmetrical with respect to a Y-axis, and are spaced apart by a predetermined distance.
- the sensor units 1 L and 1 R are connected to a control/arithmetic unit 2 , and are adapted to receive control signals from the control/arithmetic unit 2 , and to transmit detection signals to the control/arithmetic unit 2 .
- Reference numeral 4 designates a retroreflecting member, which can have a retroreflecting surface that reflects incoming light to an arrival direction.
- the retroreflecting member 4 is provided on each of three outer sides of the coordinate input effective region 3 , as illustrated in FIG. 1 .
- Each of the retroreflecting members 4 retroreflects light rays projected from the left sensor unit 1 L and the right sensor unit 1 R within a range of an angle of substantially 90° toward the sensor units 1 L and 1 R, respectively.
- each of the retroreflecting members 4 microscopically has a three-dimensional structure.
- a retroreflecting tape of the bead type, or a retroreflecting tape adapted to cause retroreflection by regularly arranging corner cubes by machining can be the retroreflecting member 4 .
- Light retroreflected by the retroreflecting members 4 is one-dimensionally detected by the sensor units 1 L and 1 R, and data representing the light amount distribution of the reflected light is transmitted to the control/arithmetic unit 2 .
- the coordinate input effective region 3 can be utilized as an interactive input device when formed as the screen of a display device, such as a PDP, a rear projector, or an LCD panel.
- a display device such as a PDP, a rear projector, or an LCD panel.
- a pointing unit such as a finger, or a pointer
- light projected from the light-projecting units is shielded, so that a light-shielded part is formed.
- the light-receiving units of the sensor units 1 L and 1 R cannot detect light coming from that light-shielded part, that is, light reflected by the retroreflection. Consequently, a direction, the light coming from which cannot be detected, can be determined.
- the pointing means in the exemplary embodiments can be any type of device for pointing a coordinate input and/or can be a finger (a person's finger).
- the control/arithmetic unit 2 detects a plurality of light-shielded ranges of a part, on which the input positioning performed by the pointer according to changes in light amount detected by the left sensor unit 1 L and the right sensor unit 1 R. Then, the control/arithmetic unit 2 calculates directions (or angles) of the end portions of the light-shielded ranges corresponding to the sensor units 1 L and 1 R according to pieces of end portion information, which pieces correspond to the light-shielded ranges.
- a pen signal receiving unit 5 receives a pen signal outputted from the pointer.
- control/arithmetic unit 2 determines data obtained from the light-shielded ranges, which are used in the coordinate calculations, according to the numbers of the detected light-shielded ranges. Also, the control/arithmetic unit 2 geometrically calculates a coordinate value indicating the light-shielded position of the pointer on the coordinate input effective region 3 according to the calculated directions (or angles), and information on the distance between the sensor units 1 L and 1 R.
- the control/arithmetic unit 2 outputs coordinate values to an external apparatus, such as a host computer, connected to the display device through an interface 7 (for example, a USB interface, or an IEEE1394 interface).
- operations of the external terminal for example, operations of drawing a line on the screen, and of operating an icon displayed on the screen of the display device are enabled by the pointer.
- each of the sensor units 1 L and 1 R roughly includes a light-projecting unit and a light-receiving unit.
- FIG. 2 is a view illustrating the detailed configuration of the sensor unit according to the first exemplary embodiment of the present invention.
- reference numerals 101 A and 101 B designate infrared LEDs adapted to emit infrared light.
- the infrared LEDs 101 A and 101 B project light to the retroreflecting members 4 by using light-projecting lenses 102 A and 102 B within a range of an angle of substantially 90 degrees.
- the light-projecting unit in each of the sensor units 1 L and 1 R is implemented by the infrared LEDs 101 A and 101 B and the light-projecting lenses 102 A and 102 B.
- each of the sensor units 1 L and 1 R includes two light-projecting units.
- infrared light rays projected by the light-projecting units are retroreflected by the retroreflecting members 4 in the arrival directions.
- the light-receiving units in the sensor units 1 L and 1 R detect the retroreflected light rays.
- Each of the light-receiving units has a one-dimensional line CCD 104 provided with a shield member 105 adapted to limit the field of view of light rays and to serve as an electrical shield. Also, each of the light-receiving units has light-receiving lenses 106 A and 106 B (for instance, f ⁇ -lenses) serving as a condenser optical system, diaphragms 108 A and 108 B adapted to substantially limit an incident direction of incident light, and infrared filters 107 A and 107 B adapted to reduce unnecessary light (disturbance light), such as visible light, from being incident thereupon.
- light-receiving lenses 106 A and 106 B for instance, f ⁇ -lenses
- diaphragms 108 A and 108 B adapted to substantially limit an incident direction of incident light
- infrared filters 107 A and 107 B adapted to reduce unnecessary light (disturbance light), such as visible light, from being incident thereupon.
- each of the sensor units 1 L and 1 R can include two light-receiving units.
- Members 103 and 109 are adapted to respectively serve as an upper hood 103 and lower hood 109 , on which optical components forming the light-projecting units and light-receiving units are provided, and are also adapted to reduce light projected by the light-projecting units from directly being incident upon the light-receiving units, or cutting off external light.
- the diaphragms 108 A and 108 B are integrally molded on the lower hood 109 in the first exemplary embodiment, the diaphragms 108 A and 108 B can be formed as separate components. Also, positioning units adapted to align the diaphragms 108 A and 108 B and the light-receiving lenses 106 A and 106 B can be provided at the side on the upper hood 103 , so that a configuration adapted to facilitate the alignment of the light-receiving units with the light-projecting centers of the light-projecting units (that is, a configuration in which all principal optical components are disposed only on the upper hood 103 ) can also be implemented.
- FIG. 3A is a view illustrating an assembled state of the sensor unit 1 L or 1 R shown in FIG. 2 , which is viewed from the front direction (that is, a direction perpendicular to the coordinate input surface).
- the two light-projecting units in the sensor unit 1 L or 1 R are disposed to be spaced apart from each other by a predetermined distance d so that directions of principal rays are substantially parallel to each other, and are also disposed to project light within the range of an angle of substantially 90 degrees by using the light-projecting lenses 102 A and 102 B.
- FIG. 3B is a cross-sectional view illustrating the sensor unit 1 L or 1 R of a portion indicated by thick arrows in FIG. 3A .
- Light, 102 L, emitted by the infrared LED 101 A or 101 B is projected by using the light-projecting lens 102 A or 102 B to the retroreflecting members 4 as a light beam, whose direction can be limited in some cases to which is substantially parallel to the coordinate input surface.
- FIG. 3C is a view illustrating the state in which the infrared LEDs 101 A and 101 B, the light-projecting lenses 102 A and 102 B, and the upper hood 103 in FIG. 3A are removed when viewed from the front direction (that is, a direction perpendicular to the coordinate input surface).
- the light-projecting units and light-receiving units are disposed (see FIG. 3B ) to be stacked in the direction perpendicular to the coordinate input effective region 3 serving as the coordinate input surface.
- the light-projecting units and light-receiving units are configured so that the emission center of each light-projecting unit coincides with a reference position (corresponding to a reference point position used to measure an angle, and the position of the diaphragm 108 A or 108 B in the first exemplary embodiment, that is, the intersection of light rays in FIG. 3C ) of each light-receiving unit, when viewed from the front direction (a direction perpendicular to the coordinate input surface).
- the two light-projecting units are provided to be spaced apart from each other by the predetermined distance d so that the directions of principal rays are substantially parallel to each other. Consequently, the two light-receiving units are also provided to be spaced apart from each other by the predetermined distance, in this non limiting example d the same amount, so that the optical axes (that is, the optical symmetric axes) are substantially parallel to each other.
- This light is focused and imaged on the surface of the detection element 110 of the line CCD 104 through the infrared filter 107 A or 107 B, the diaphragm 108 A or 108 B, and the light-receiving lens 106 A or 106 B.
- an output signal of the line CCD 104 represents a light amount distribution corresponding to an angle of incidence of reflected light. Therefore, the pixel number of each of the pixels of the line CCD 104 is represented by angle information.
- the distance L between the light-projecting unit and the light-receiving unit shown in FIG. 3B is assumed to have a value sufficiently smaller than the distance from the light-projecting unit to the retroreflecting member 4 . Thus, even when the distance L is provided therebetween, sufficient retroreflected light can be detected by each of the light-receiving units.
- the sensor unit 1 L or 1 R adopts an arrangement having at least two light-projecting units and two light-receiving units for respectively detecting light projected by these light-projecting units (in the first exemplary embodiment, two pairs of light-projecting units and light-receiving units)
- the left-side portion of the detection element 110 linearly arranged on the line CCD 104 which is a part of the light-receiving units, is used as a focusing region of the first light-receiving unit.
- the right-side portion of the detection element 110 is used as a focusing region of the second light-receiving unit.
- Line CCDs can be individually provided to the light-receiving units.
- the control/arithmetic unit 2 and each of the sensor units 1 L and 1 R exchange mainly CCD control signals for the line CCD 104 in the light-receiving units, CCD clock signals and output signals, and drive signals for the infrared LEDs 101 A and 101 B in the light-projecting units.
- control/arithmetic unit 2 The configuration of the control/arithmetic unit 2 is described below by referring to FIG. 4 .
- FIG. 4 is a block view illustrating the configuration of the control/arithmetic unit 2 according to the first exemplary embodiment of the present invention in detail.
- the CCD control signals are outputted from an arithmetic control circuit (CPU) 21 including a one-chip microcomputer thereby to set the shutter timing of the line CCD 104 , and to control an operation of outputting data.
- CPU arithmetic control circuit
- the arithmetic control circuit (e.g., CPU) 21 operates in response to clock signals from a clock generation circuit (CLK) 22 .
- the CCD clock signals are transmitted from the clock generation circuit (CLK) 22 to the sensor units 1 L and 1 R, and are also inputted to the arithmetic control circuit 21 to achieve various control operations in synchronization with the line CCDs 104 in the sensor units.
- the LED drive signals used to drive the infrared LEDs 101 A and 101 B in the light-projecting units are supplied from the arithmetic control circuit 21 to the infrared LEDs 101 A and 101 B in the light-projecting units of the associated sensor units 1 L and 1 R through an LED drive circuit (not shown).
- Detection signals outputted from the line CCDs 104 in the light-receiving units of the sensor units 1 L and 1 R are inputted to an A/D converter 23 and are converted into digital values under the control of the arithmetic control circuit 21 .
- the converted digital values are stored in a memory 132 , and are used to calculate angles of the pointers. Coordinate values are calculated from the calculated angles, and are outputted to an external terminal through the serial interface 7 (for example, a USB interface, an IEEE1394 interface, or an RS232C interface and any other interface as known by one of ordinary skill in the relevant art).
- a pen signal receiver 5 adapted to receive a pen signal from the pen outputs a digital signal generated by demodulating the pen signal. Then, the digital signal is inputted to a sub-CPU 24 serving as a pen signal detection circuit that analyzes the pen signal, and outputs a result of analysis to the arithmetic control circuit 21 .
- FIG. 5 is an explanatory view illustrating the optical configuration of the coordinate input apparatus according to the first exemplary embodiment of the present invention.
- FIG. 5 illustrates, the configuration of the left sensor unit 1 L.
- the right sensor unit 1 R has substantially the same features as those of the left sensor unit 1 L, except that it is symmetric to the left sensor unit 1 L with respect to the Y-axis in FIG. 5 , and the description thereof is omitted.
- the sensor unit 1 L has a pair of light-projecting units and a pair of light-receiving units.
- the optical axes thereof (that is, the optically symmetric axes respectively corresponding to light rays 151 and 161 ) are disposed to substantially be parallel to each other, and to be spaced apart from each other by the predetermined distance d.
- the sensor unit 1 L is disposed so that a sensor surface thereof is inclined to one side of the coordinate input effective region 3 by an angle ⁇ s .
- the light-projecting range of one light-projecting unit (or the detection angle range of one light-receiving unit) in the sensor unit 1 L is defined by light rays 152 and 153 , and that of the other light-projecting unit is defined by light rays 162 and 163 .
- the sensor unit 1 R has two pairs of optical units that correspond to a pair of light-projecting units and a pair of light-receiving units (that is, optical units R 1 and R 2 ).
- the effective visual field range of two optical units (that is, the light-projecting unit and the light-receiving unit) defined by the light rays 152 and 153 or the light rays 162 and 163 is substantially 90 degrees for the non-limiting example.
- the effective visual field range can vary for example it can be set to be 100 degrees. However, in a case where the effective visual field range is set and designed to be wider, the optical distortion of optical components (for instance, lenses) forming the optical units becomes larger and can make it less useful for forming an inexpensive optical system.
- the two light-receiving units in the sensor unit 1 L can detect the light-shielded position of the pointer (a light-shielding object) in the region 171 .
- this setting can cause a problem in that, for example, a housing frame determined by the relation between a housing 172 of the coordinate input apparatus, which incorporates the components, and the coordinate input region 171 becomes large.
- the size of the coordinate input apparatus becomes large, as compared with an operable region.
- at least one exemplary embodiment reduces not only the size of the sensor unit 1 L or 1 R but the predetermined distance d between the two pairs of optical units (that is, the light-projecting units and the light-receiving units), which is defined by the light rays 151 and 161 .
- the effective field of view of one light-receiving unit in the sensor unit 1 L ( 1 R) can include the entire coordinate input effective region 3 . Also, a region defined by a region 173 shown in FIG. 5 of the other light-receiving unit is set to be outside the effective visual field.
- the distance d is set so that a projected component of the distance d, as viewed from the direction of the pointer, that is, the value of d*cos ( ⁇ L - ⁇ S ) is substantially equal to a radius of the pointer when the pointer is placed at the left or right end portion or the top portion of the coordinate input effective region 3 .
- ⁇ L is an angle measured from a left vertical line passing through L 1 to the point of interest (see FIG. 19 ).
- the apparatus is configured so that the pointer existing in the region 173 shown in FIG. 5 is prevented from being completely included in an area defined between the light rays 151 and 161 shown in FIG. 5 .
- the first exemplary embodiment can acquire data representing light intensity distributions obtained from the optical units L 1 , L 2 , R 2 , and R 1 shown in FIG. 5 . Then, the first exemplary embodiment calculates the number of shadows and the positions (or angles) of the shadows, which are obtained by the optical units, according to the light intensity distributions. Also, the first exemplary embodiment sequentially selects four combinations (L 1 , R 1 ), (L 1 , R 2 ), (L 2 , R 1 ), and (L 2 , R 2 ) of the optical unit L 1 or L 2 of the sensor unit 1 L and the optical unit R 1 or R 2 of the sensor unit 1 R.
- the first exemplary embodiment determines coordinate candidate points respectively corresponding to the combinations of the optical units and also determines the situation of overlaps among the coordinate candidate points. Then, the first exemplary embodiment selects an appropriate combination of the optical units thereamong. Consequently, the first exemplary embodiment determines actual input points from the coordinate candidate points (that is, performs what is called a true or false determination). Finally, the first exemplary embodiment determines two input coordinates.
- the four combinations (L 1 , R 1 ), (L 1 , R 2 ), (L 2 , R 1 ), and (L 2 , R 2 ) of the optical units are referred to as the “LR-optical unit combinations” or the “LR-combinations.”
- FIG. 6 is a flowchart illustrating the coordinate calculation process performed by the coordinate input apparatus according to the first exemplary embodiment.
- step S 1 data representing the light intensity distributions in the optical units L 1 , L 2 , R 1 , and R 2 is acquired.
- steps S 2 to S 5 data representing light intensity distributions corresponding to the LR-combinations is sequentially selected from the acquired data representing the light intensity distributions. Then, a coordinate candidate point determination process is performed on the selected data representing the light intensity distributions.
- the combinations of the numbers of shadows, which correspond to the LR-combinations can be determined in steps S 2 to S 5 .
- Condition B ( 2 - 1 ) in which one of the optical units of one of the sensor units detects two shadows, and in which one of the optical units of the other sensor unit detects only one overlapping shadow.
- the shadow associated with the input pointing can be detected by a substantial portion of the optical units other than the one of the optical units.
- the first exemplary embodiment determines which of the conditions A to D each of the LR-combinations of the optical units corresponds to. According to results of this determination, the first exemplary embodiment then determines a detection state of each of the optical units of the sensor units 1 L and 1 R, in which shadows are detected, among the following detection states.
- the first exemplary embodiment determines in steps S 6 to S 8 , S 10 and S 11 a detection state of each of the optical units, in which the number of shadows is detected. Subsequently, the first exemplary embodiment performs coordinate calculation in steps S 13 to S 16 according to the following coordinate calculation methods preliminarily defined corresponding to the determined detection states, respectively. Subsequently, the first exemplary embodiment outputs results of the coordinate calculation in step S 17 . Meanwhile, if no detection state is determined, the first exemplary embodiment determines in step S 9 or S 12 that the detection of coordinates can be difficult. Then, the process is finished.
- the detection states [ 1 ] to [ 4 ] can be determined in this descending priority order. For example, in a case where the LR-combinations meet the detection states [ 3 ] and [ 4 ], the detection state [ 3 ] can be chosen to be determined.
- coordinate calculation can be performed by using the optical unites of any of the LR-combinations.
- coordinate calculation is conducted by performing a coordinate calculation process ( 1 ), which will be described later, and by using the optical units of the LR-combination (L 1 , R 1 ).
- the three patterns are defined as detection states [ 2 ]- 1 , [ 2 ]- 2 , and [ 2 ]- 3 .
- the optical units R 1 and R 2 of the sensor unit 1 R observe shading waveforms (or light intensity distributions) each having valleys respectively corresponding to two shadows, which are shown in FIGS. 8A and 8B .
- the waveforms detected by the optical units R 1 and R 2 of the sensor unit 1 R are compared with each other.
- a direction of a straight line (P 12 -P 21 ) determined by these two points is relatively closer to a direction, in which the optical unit R 1 is placed, than a direction in which the optical unit R 2 is placed. That is, two shadows observed by the optical unit R 1 are closer to each other than those observed by the optical unit R 2 .
- the distance between the observed two shadows corresponds to what is called a parallax.
- the two shadows detected from the waveform observed by the optical unit R 1 seem to be closer to each other than those detected from the waveform observed by the optical unit R 2 .
- the two shadows detected from the waveform observed by the optical unit R 2 seem to be closer to each other than those detected from the waveform observed by the optical unit R 1 .
- the true or false determination performed on the four coordinate candidate points shown in FIG. 7 can be achieved by determining which of the waveforms respectively observed by the optical units R 1 and R 2 corresponds to a smaller distance between the two shadows.
- the true or false determination can be achieved by determining which of the two optical units of each of the sensor units observes two shadows formed closer to each other.
- the true or false determination can be performed on the four coordinate candidate points by using the sensor unit 1 L.
- two shadows observed by the optical unit R 1 are not necessarily formed closer to each other than those observed by the optical unit R 2 .
- the true or false determination can be performed on the four coordinate candidate points by using the sensor unit 1 R.
- two shadows observed by the optical unit L 2 are not necessarily formed closer to each other than those observed by the optical unit L 1 .
- the true or false determination can be achieved by using the sensor unit 1 L. Also, the true or false determination can be achieved by using the sensor unit 1 R.
- the true or false determination can be achieved by using the sensor unit 1 L. Conversely, the true or false determination can be difficult when the sensor unit 1 R is used.
- the true or false determination can be difficult when the sensor unit 1 L is used. Conversely, the true or false determination can be achieved by using the sensor unit 1 R.
- important prerequisites for the true or false determination according to at least one exemplary embodiment are that the larger the angle ⁇ L at the side of the sensor unit 1 L of the candidate point becomes, the candidate point is placed closer to the sensor unit 1 R, among the four coordinate candidate points, and that similarly, the larger the angle ⁇ R at the side of the sensor unit 1 R of the candidate point becomes, the candidate point is placed closer to the sensor unit 1 L.
- L 1 and R 1 denote the approximate positions of the sensor units 1 L and 1 R, respectively (however, reference numerals L 1 and R 1 can designate the positions of the optical units L 2 and R 2 , or can denote the positions of midpoints of the two optical units of the sensor units).
- the distances among the four coordinate candidate points P 11 , P 12 , P 21 , and P 22 and the sensor units 1 L and 1 R shown in FIG. 7 should meet the following inequalities.
- L1-P22 ⁇ L1-P11 (11) L1-P12 ⁇ L1-P21 (12)
- the true or false determination can be achieved in both of the case of using the sensor unit 1 L and the case of using the sensor unit 1 R.
- the true or false determination can be achieved in the case of using the sensor unit 1 L.
- the true or false determination can be achieved in the case of using the sensor unit 1 R.
- both of the inequalities (11) and (12) are satisfied.
- the true or false determination can be achieved in the case of using the sensor unit 1 L.
- the inequality (14) is not satisfied.
- the true or false determination cannot be performed in the case of using the sensor unit 1 R.
- both of the inequalities (13) and (14) are satisfied.
- the true or false determination can be achieved in the case of using the sensor unit 1 R.
- the inequality (11) is not satisfied.
- the true or false determination cannot be performed in the case of using the sensor unit 1 L.
- the sensor unit to be used in the true or false determination is selected according to whether each of the inequalities (11) to (14) is satisfied.
- the coordinate input apparatus can achieve the true or false determination without errors by inhibiting the sensor unit, the position of which does not satisfy at least one of the inequalities (11) to (14), from being selected.
- the coordinates of the points P 11 and P 12 , or the points P 12 and P 21 are calculated by performing a coordinate calculation process ( 1 ), which will be described later, by using the optical units of the combination selected according to the true or false determination.
- the coordinates of the actual input point can be determined as follows.
- T and U denote the one of the optical units and the other optical unit of the same sensor unit, respectively.
- two coordinates that is, the coordinates of the points P 11 and P 22 ) determined by shadows of two combinations, which are respectively detected by the two optical units belonging to the different sensor units and which respectively correspond to an angle near to and an angle far from a direction of the other sensor unit, are regarded as two actual input coordinates.
- two coordinates that is, the coordinates of the points P 12 and P 21 ) determined by shadows of two combinations, which are respectively detected by the two optical units belonging to the different sensor units and which respectively correspond to a combination of an angle near to and an angle far from a direction of the other sensor unit and a combination of an angle far from and an angle near to the direction of the other sensor unit, are regarded as two actual input coordinates.
- the coordinates of the points P 11 , P 12 , P 21 , and P 22 are calculated by performing a coordinate calculation process ( 2 ), which will be described later, by using the optical units of the combination (L 1 , R 2 ).
- the coordinates of the points PP 1 and PP 2 are calculated by performing a coordinate calculation process ( 1 ), which will be described later, by using the optical units of the combination (L 1 , R 1 ).
- the candidate points P 12 and P 21 can be determined as two input points according to actual input data.
- the candidate points PP 1 and PP 2 can be determined according to a coordinate calculation process ( 2 ), which will be described later, by using the optical units of the combination (L 1 , R 2 ). Also, as illustrated in FIG. 15 , the candidate points PP 1 and PP 2 can be determined according to the coordinate calculation process ( 1 ), which will be described later, by using the optical units of the combination (L 1 , R 1 ).
- angles indicating directions of two virtual shadows that overlap are estimated from the overlapping shadows. According to the angles, the coordinates are calculated by a method related to that in the case where two shadows are detected.
- four coordinate candidate points are calculated by using a state detected by the optical unit R 2 shown in FIG. 14 .
- the four coordinate candidate points P 11 , P 12 , P 21 , and P 22 can be established by the combination of the optical units L 1 and R 2 . Then, the true or false determination is performed on these coordinate candidate points.
- the overlapping rate of shadows corresponding to the optical unit R 1 becomes larger.
- the overlapping rate of shadows corresponding to the optical unit R 1 becomes smaller.
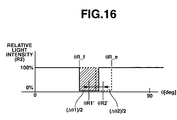
- the overlapping rate of shadows corresponding to the optical unit R 1 is higher, as illustrated in FIG. 18A . That is, the value of the width ⁇ R 1 _fe is observed to be relatively smaller than the observed value of the width ⁇ R 2 _fe.
- the overlapping rate of shadows corresponding to the optical unit R 2 is higher, as illustrated in FIG. 18B . That is, the value of the width ⁇ R 2 _fe is observed to be relatively smaller than the observed value of the width ⁇ R 1 _fe.
- the true or false determination is achieved in the state [ 4 ] according to which of the values of the widths ⁇ R 1 _fe and ⁇ R 2 _fe, that is, the values of ⁇ R_fe, which respectively correspond to the optical units R 1 and R 2 , is smaller.
- Results of coordinate calculation in the case of one input point or two input points, which are obtained according to one of the aforementioned coordinate calculation methods [ 1 ] to [ 4 ], are outputted to an external terminal through a serial interface 7 and are displayed as a motion or a trajectory of a cursor in an output unit, such as an image display device.
- Optical units provided at the outwardly left side and the outwardly right side of the coordinate input effective region 3 in the sensor units 1 L and 1 R, as viewed in FIG. 19 are the optical units L 1 and R 1 , respectively.
- Optical units provided at the inwardly left side and the inwardly right side of the coordinate input effective region 3 in the sensor units 1 L and 1 R, as viewed in FIG. 19 are the optical units L 2 and R 2 , respectively.
- Angle data obtained from each of the optical units is defined so that an angle in a downward Y-axis direction of an associated sensor unit is set to be 0, and that the angle increases in inward directions in a left-right symmetric manner.
- P(L 1 ), P(L 2 ), P(R 1 ), and P(R 2 ) designate the coordinates of the positions of the optical units, respectively.
- a point O is set to be an origin. Also, the following functions X t and Y t adapted to determine an X-direction and a Y-direction, as illustrated in FIG. 19 , are defined.
- the coordinates of the point P 1 (X, Y) are obtained as follows by setting the point O shown in FIG. 19 as an origin.
- X DLR*X t ( ⁇ L ⁇ 45 , ⁇ R ⁇ 45) (19)
- Y DLR*Y t ( ⁇ L ⁇ 45 , ⁇ R ⁇ 45) (20)
- P′ designate a position pointed by the pointer.
- S′ denote an intersection of a straight line (P(L 1 )-P(R 1 )) and a straight line (P(L 2 )-P′).
- the coordinates can similarly be calculated by changing the sign of the aforementioned X-component.
- the coordinates can be calculated corresponding to a substantial portion of the LR-combinations in the first exemplary embodiment.
- the first exemplary embodiments determines the optical unit that detects the shadows, which are observed to be closer to each other than the shadows detected by the other of the two optical units of both or one of the sensor units. As illustrated in FIG. 8A , the first exemplary embodiment assumes the following parameters as the parameter indicating the degree of closeness of two shadows:
- ⁇ R_MIDDLE a first angle corresponding to the distance between the substantial middles of the shadows
- ⁇ R_INSIDE a second angle corresponding to the distance between the inner ends of the shadows
- the true or false determination using these four kinds of parameters is used in the coordinate calculation process in the aforementioned detection state [ 2 ].
- FIG. 22 is a flowchart illustrating the coordinate calculation process in the detection state [ 2 ] of the first exemplary embodiment in detail.
- FIG. 22 or FIG. 23 showing a second exemplary embodiment are defined as follows.
- Total_kj a comprehensive true or false determination.
- Unit_kj a true or false determination by using one of the selected sensor units.
- CR a true or false determination using input points P 11 and P 22 as actual coordinates.
- Min( ⁇ cnt(*)) a minimum value of ⁇ cnt(*) in all of the optical units
- step S 101 it is determined whether the true or false determination using the sensor unit 1 L can be achieved.
- step S 101 it is determined whether the inequalities (11) and (12) (L 1 -P 22 ⁇ L 1 -P 11 and L 1 -P 12 ⁇ L 1 -P 21 ) are satisfied.
- step S 102 it is determined which of the optical units L 1 and L 2 of the sensor unit 1 L observes shadows to be relatively closer to each other than shadows observed by the other optical unit.
- this determination is according to the magnitude of the angle (the smaller the magnitude of the angle is, the closer to each other the shadows become).
- the magnitude of the angle is represented by the expression ⁇ L_* (“*” is one of “OUTSIDE”, “INSIDE” and “MIDDLE”).
- the degree of closeness of the two shadows is determined according to one of ⁇ L_OUTSIDE, ⁇ L_INSIDE, ⁇ L_MIDDLE, ( ⁇ L_INSIDE/ ⁇ L_MIDDLE), and ( ⁇ L_INSIDE/ ⁇ L_OUTSIDE).
- step S 102 If ⁇ L 1 _*> ⁇ L 2 _* (YES in step S 102 ), the process advances to step S 103 .
- steps S 106 to S 110 which correspond to steps S 101 to S 105 , are performed.
- step S 106 it is determined whether the inequalities (13) and (14) (R 1 -P 21 ⁇ R 1 -P 12 and R 1 -P 22 ⁇ RL-P 1 ) are satisfied.
- step S 107 it is determined whether the following inequality ⁇ R 1 _*> ⁇ R 2 _* is satisfied.
- step S 111 a comprehensive true or false determination, that is a final true or false determination is performed according to results of the determination on which the true or false determination using the sensor unit 1 L or 1 R can be achieved.
- St, CR, or NG is determined as a value representing a result of the comprehensive true or false determination Total_kj according to values of Lkj and Rkj, which are results of the true or false determination by using the sensor unit 1 L and the true or false determination by using the sensor unit 1 R and are shown in step S 111 in the flowchart.
- the sensor units are configured in the vicinities of both ends of one side of the coordinate input effective region.
- the two optical units adapted to detect angles corresponding to angle information which represents the directions of shadows or images generated by causing the pointer to enter the coordinate input effective region, are disposed apart from each other by a predetermined parallax (or distance).
- the coordinates of the positions of the pointers in a case, in which the pointers concurrently enter the coordinate input effective region are calculated by using the combination of pieces of angle information on angles of shadows detected by the two optical units of the different sensor units and the combination of pieces of angle information on angles of shadows detected by the two optical units of the same sensor unit.
- the sensor unit to be used to perform a true or false determination is determined according to predetermined conditions (or the relation in distance among the coordinate candidate points).
- the true or false determination is performed by using results of the detection by the two optical units of the selected sensor unit and by also using the parallax.
- a second exemplary embodiment is an application of the first exemplary embodiment.
- the sensor unit to be used to perform the true or false determination is selected according to the inequalities (11) to (14). Then, the coordinate calculation process is performed by using the selected sensor unit.
- the four coordinate candidate points constitute a flat rectangle.
- An angle detected by one of the sensor units 1 L and 1 R is close to zero (that is, the coordinate candidate points are close to the left side or the right side of the coordinate input effective region 3 , as viewed in this figure).
- the true or false determination using the sensor unit 1 L is achieved. However, the true or false determination using the sensor unit 1 R is not performed. Conversely, in a case where the two shadows detected by the sensor unit 1 R are closer to each other, as compared with shadows detected by the sensor unit 1 L, the true or false determination by using the sensor unit 1 R is achieved. However, the true or false determination using the sensor unit 1 L is not performed.
- the four coordinate candidate points are concentrated in the vicinity of a central part of the top side of the coordinate input effective region 3 .
- the angles detected by the sensor units 1 L and 1 R are relatively close to 90 degrees.
- the points P 11 and P 22 do not satisfy the inequalities (11) to (14).
- the point P 22 is positioned far from the sensor unit 1 L, as compared with the point 11 .
- the true or false determination using the sensor unit 1 L cannot be achieved.
- the true or false determination using the sensor unit 1 R can be achieved. It is geometrically obvious that the points P 11 and P 22 do not simultaneously satisfy the inequalities (11) and (13) and that the points P 11 and P 22 satisfy one of the inequalities (11) and (13) at all times.
- FIG. 23 is a flowchart illustrating the coordinate calculation process in the detection state [ 2 ] of the second exemplary embodiment in detail.
- step S 201 it is determined whether the true or false determination using the sensor unit 1 L can be achieved.
- step S 201 If the inequality ⁇ L 1 _*> ⁇ L 2 _* is satisfied (YES in step S 201 ), the process advances to step S 202 .
- steps S 204 to S 206 which correspond to steps S 201 to S 203 , are performed.
- step S 204 it is determined whether the inequality ( ⁇ R 1 _*> ⁇ R 2 _*) is satisfied, instead of whether the inequalities (13) and (14) (R 1 -P 21 ⁇ R 1 -P 12 and R 1 -P 22 ⁇ R 1 -P 11 ) are satisfied.
- step S 207 a comprehensive true or false determination, that is a final true or false determination is performed according to results of the determination on which the true or false determination using the sensor unit 1 L or 1 R can be achieved.
- ST, CR, or NG is determined as a value representing a result of the comprehensive true or false determination Total_kj according to values of Lkj and Rkj, which are results of the true or false determination by using the sensor unit 1 L and the true or false determination by using the sensor unit 1 R and are shown in step S 207 in the flowchart.
- step S 207 if it is determined in step S 207 that the result of the true or false determination using the sensor unit 1 L is the same as the result of the true or false determination using the sensor unit 1 R, the result of the true or false determination is settled. This is the state (the detection state [ 2 ]- 1 ) shown in FIG. 7 .
- one of the true or false determination using the sensor unit 1 L and the true or false determination using the sensor unit 1 R is erroneous. That is, this is the state shown in FIG. 9 or 10 (that is, the detection state [ 2 ]- 2 or ( 2 )- 3 .
- a process subsequent to step S 208 is performed.
- ⁇ cnt(*) is defined as follows.
- ⁇ cnt ( L 1) ( ⁇ L 1 ⁇ aP 11 + ⁇ L 1 ⁇ aP 22)/2
- ⁇ cnt ( L 2) ( ⁇ L 2 ⁇ aP 11 + ⁇ L 2 ⁇ aP 22)/2
- ⁇ cnt ( R 1) ( ⁇ R 1 ⁇ aP 11 + ⁇ L 1 ⁇ aP 22)/2
- ⁇ cnt ( R 2) ( ⁇ R 2 ⁇ aP 11 + ⁇ L 1 ⁇ aP 22)/2
- Suffixes L 1 , L 2 , R 1 , and R 2 added to ⁇ indicate that angles E are respectively detected by the optical units L 1 , L 2 , R 1 , and R 2 .
- aP 11 and aP 22 represent angles respectively associated with the coordinate candidate points P 11 and P 22 .
- an angle designated by aP 22 is larger than an angle indicated by aP 11 (that is, the direction of aP 22 is closer to the top side of the coordinate input effective region 3 ).
- step S 208 the angles ⁇ cnt(*) corresponding to the optical units L 1 , L 2 , R 1 , and R 2 are calculated.
- step S 209 a minimum value Min( ⁇ cnt(*)) of ⁇ cnt(*) is selected.
- step S 210 it is determined whether Min( ⁇ cnt(*)) is less than a predetermined angle ⁇ A (for example, 45 degrees). If Min( ⁇ cnt(*)) is less than the predetermined angle A (YES in step S 210 ), the state is deduced to be the detection state [ 2 ]- 2 . Then, the process proceeds to step S 212 .
- step S 212 a determination is performed to select the sensor unit whose optical units detect the shadows which are closer to each other than shadows detected by the other sensor unit.
- the optical unit is selected by comparing ⁇ L with ⁇ R.
- step S 213 the true or false determination using the optical unit selected by the determination in step S 212 is definitely determined. Thereafter, the process proceeds to step S 216 or S 217 according to a result of the comprehensive true or false determination.
- step S 210 determines whether Min( ⁇ cnt(*)) is equal to or more than the predetermined angle ⁇ A (NO in step S 210 ). If it is determined in step S 210 that Min( ⁇ cnt(*)) is equal to or more than the predetermined angle ⁇ A (NO in step S 210 ), the process advances to step S 211 , wherein it is determined whether Min( ⁇ cnt(*)) is equal to or more than the predetermined angle ⁇ B (for example, 60 degrees). If it is determined that Min( ⁇ cnt(*)) is larger than the predetermined angle ⁇ B, the state is deduced to be the detection state [ 2 ]- 3 . Then, the process advances to step S 214 .
- step S 214 the sensor unit satisfying the inequality (11) or (13) (Distance Unit_kj ⁇ P 22 >Distance Unit_kj-P 11 ) is selected.
- step S 215 the true or false determination using the optical unit selected by the determination in step S 214 is definitely determined as a final comprehensive true or false determination. Thereafter, according to a result of the comprehensive true or false determination, the process proceeds to step S 216 or S 217 .
- step S 211 determines whether Min( ⁇ cnt(*)) is less than the predetermined angle ⁇ B (NO in step S 211 ), that is, ⁇ A ⁇ Min( ⁇ cnt(*)) ⁇ B. If it is determined in step S 218 that the true or false determination can be difficult. Consequently, it is definitely determined that the detection of the coordinates can be difficult.
- the sensor unit to be used to perform the true or false determination is selected according to a predetermined condition (that is, the predetermined relation between the angle and the coordinate candidate point) in the apparatus according to the first exemplary embodiment in a case where shadows associated with two input points do not overlap even when observed from any of the optical units. Then, the true or false determination is performed by using the result of the detection by the two optical units of the selected sensor unit and also using the parallax.
- a predetermined condition that is, the predetermined relation between the angle and the coordinate candidate point
- the methods of performing the true or false determination which is performed in a case where essentially, shadows do not overlap in the light intensity distribution observed by the selected sensor unit have been described.
- a true or false determination method performed in a case, in which shadows are essentially observed to overlap on the light intensity distribution observed by the selected sensor unit is described.
- Condition B 1 ( 2 - 1 ) in which one of the optical units of one of the sensor units detects two shadows, and in which one of the optical units of the other sensor unit detects only one overlapping shadow.
- the third exemplary embodiment determines which of the conditions A, B 1 , C 1 , and D each of the LR-combinations of the optical units corresponds to. According to results of this determination, the third exemplary embodiment then determines a detection state of each of the optical units of the sensor units 1 L and 1 R, in which shadows are detected, among the following detection states.
- the detection states in which the number of shadows is detected, are related to those in the first exemplary embodiment, the coordinate calculation methods respectively corresponding to the detection states [ 1 ] to [ 4 ] differ from those in the first exemplary embodiment.
- the differences between the third exemplary embodiment and the first exemplary embodiment are described hereinbelow.
- the coordinate calculation methods [ 1 ] and [ 3 ] are performed, similarly to the first exemplary embodiment.
- the coordinate calculation method [ 2 ] according to the third exemplary embodiment which method differs from the coordinate calculation method [ 2 ] according to the first exemplary embodiment, is performed.
- the coordinate calculation method [ 2 ] according to the third exemplary embodiment is described.
- the candidate points P 11 , P 12 , P 21 , and P 22 can be determined according to the aforementioned coordinate calculation process ( 1 ) using the optical units of the combination (L 1 , R 1 ).
- the candidate points P′ 11 , P′ 12 , P′ 21 , and P′ 22 can be determined according to the aforementioned coordinate calculation process ( 2 ) using the optical units of the combination (L 2 , R 1 ).
- the values of the coordinates of the four candidate points obtained corresponding to the LR-combination (L 1 , R 1 ) are compared with those of the coordinates of the four candidate points obtained corresponding to the LR-combination (L 2 , R 1 ).
- the coordinate candidate points based on actually inputted coordinates which respectively correspond to both of the LR-combinations, have the same coordinates in principle.
- the coordinate candidate points, which are not based on the actually inputted coordinates (what are called the coordinate candidate points forming a virtual image) and respectively correspond to both of the LR-combinations, have different coordinates due to the influence of offset of the positions of the optical units.
- the coordinate values of the coordinate candidate points which are found by the comparison among the four coordinate candidate points obtained by using the LR-combinations to substantially be equal to compared values, can be determined as those of true two input points.
- the candidate points P 11 (P′ 11 ) and P 22 (P′ 22 ) are determined as the two input points actually inputted.
- the candidate points PP 1 and PP 2 can be determined according to the aforementioned coordinate calculation process ( 2 ) by using the optical units of the combination (L 1 , R 2 ). Also, as illustrated in FIG. 15 , the candidate points P 11 and P 22 can be determined according to the aforementioned coordinate calculation process ( 1 ) by using the optical units of the combination (L 1 , R 1 ).
- the two input coordinates actually inputted can approximately be determined by using the optical units of either of the LR-combinations.
- the overlapping shadows can be arranged approximately linearly in the direction of an angle ( ⁇ R_c) corresponding to a straight line passing through the centers of the overlapping shadows.
- the direction of the overlapping shadows is that of the angle ⁇ R_c corresponding to each of the optical units R 1 and R 2 shown in FIGS. 14 , 15 , 18 A and 18 B.
- the coordinates can more accurately be calculated by employing the angle OR_c obtained from the light intensity distribution of the optical unit R 1 , instead of employing the angle OR_c obtained from the light intensity distribution of the optical unit R 2 .
- the overlapping rate corresponding to the light intensity distribution of the optical unit R 2 is compared with that corresponding to the light intensity distribution of the optical unit R 1 , as illustrated in FIG. 18A , the light intensity distribution of the optical unit corresponding to a smaller one of the widths ⁇ R 1 _fe and ⁇ R 2 _fe of the overlapping shadows is employed as the light intensity distribution corresponding to a larger overlapping rate.
- V denote one of the optical units of one of the sensor units, which detects overlapping shadows that are associated with two inputs contemporaneously performed and that have a higher overlapping rate, a compared with shadows detected by the other optical unit. Then, two coordinates determined by an angle determined by the center of the overlapping shadows, which is detected by the optical unit V, and an angle of each of two shadows detected by one of the two optical units of the other sensor unit can be determined as two input coordinates.
- the coordinates of two points PP 1 and PP 2 can be calculated according to either of the combinations (L 1 , R 2 ) and (L 1 , R 1 ) of the optical units.
- the candidate points PP 1 and PP 2 shown in FIG. 15 can be determined as the actual two input points.
- Results of coordinate calculation in the case of one input point or two input points, which are obtained according to one of the aforementioned coordinate calculation methods [ 1 ] to [ 4 ], are outputted to an external terminal through the serial interface 7 and are displayed as a motion or a trajectory of a cursor in an output unit, such as an image display device.
- the third exemplary embodiment accuracy of the true or false determination is deteriorated.
- the accuracy of the true or false determination can be enhanced by utilizing the overlapping condition of the shadows. Consequently, regardless of whether detected shadows overlap, the true or false determination can stably be performed.
- a coordinate calculation operation of the coordinate input apparatus can be stabilized and assured.
- a coordinate input apparatus can be configured so that coordinate calculation is performed by selecting one of the coordinate calculation method [ 1 ] according to the first exemplary embodiment and the coordinate calculation method [ 4 ] according to the third exemplary embodiment in accordance with a purpose and a use.
- a coordinate input apparatus can be configured so that coordinate calculation is performed by selecting one of the coordinate calculation method [ 2 ] according to the first exemplary embodiment and the coordinate calculation method [ 2 ] according to the third exemplary embodiment according to a purpose and a use.
- the coordinate calculation method [ 4 ] according to the first exemplary embodiment is more generally described as follows.
- Shadows respectively associated with concurrently inputted two points are detected by both of two optical units (for instance, optical units R 1 and R 2 ) of a first sensor unit (for example, a sensor unit 1 R) to overlap with each other.
- T designates the optical unit adapted to detect the overlapping shadows having the overlapping rate that is higher than the overlapping rate of shadows detected by the other optical unit.
- U denotes the latter optical unit.
- an optical unit T (the optical unit R 2 in this case) is placed near to the other sensor unit, that is, a second sensor unit (for example, a sensor unit 1 L), two coordinates determined by a first combination of angles (a) and (b), which are defined below, and a second combination of angles (c) and (d), which are defined below, are calculated as actual input coordinates.
- a second sensor unit for example, a sensor unit 1 L
- the angle (a) is defined to correspond to one end portion of shadows detected by the optical unit T or U to overlap with each other, which portion is nearer to the direction of the second sensor unit than the other end portion of the shadows.
- the angle (b) is defined to correspond to the shadow that is detected by one of the optical units (for example, the optical units L 1 and L 2 ) and that is nearer to the second sensor unit than the other optical unit.
- the angle (c) is defined to correspond to one end portion of shadows detected by the optical unit T or U to overlap with each other, which portion is farther away from the direction of the second sensor unit than the other end portion of the shadows.
- the angle (d) is defined to correspond to the shadow that is detected by one of the optical units (for example, the optical units L 1 and L 2 ) and that is farther from the direction of the second sensor unit than the other optical unit.
- an optical unit T (the optical unit R 1 in this case) is placed far from the other sensor unit, that is, a second sensor unit (for example, a sensor unit 1 L), two coordinates determined by a third combination of angles (e) and (f), which are defined below, and a fourth combination of angles (g) and (h), which are defined below, are calculated as actual input coordinates.
- the angle (e) is defined to correspond to one end portion of shadows detected by the optical unit T or U to overlap with each other, which portion is nearer to the direction of the second sensor unit than the other end portion of the shadows.
- the angle (f) is defined to correspond to the shadow that is detected by one of the optical units (for example, the optical units L 1 and L 2 ) and that is nearer to the second sensor unit than the other optical unit.
- the angle (g) is defined to correspond to one end portion of shadows detected by the optical unit T or U to overlap with each other, which portion is farther away from the direction of the second sensor unit than the other end portion of the shadows.
- the angle (h) is defined to correspond to the shadow that is detected by one of the optical units (for example, the optical units L 1 and L 2 ) and that is farther away from the direction of the second sensor unit than the other optical unit.
- the present invention can be embodied as, for example, a system, an apparatus, a method, a program, or a storage medium. Practically, the present invention can be applied to a system including a plurality of devices, and to an apparatus constituted by a single device.
- Exemplary embodiments can also be implemented by supplying a software program (in the embodiment, a program corresponding to each of flowcharts illustrated in the figures), which implements the functions of the aforementioned exemplary embodiments, directly or remotely to a system or an apparatus, and reading and executing the supplied program code by a computer of the system or the apparatus.
- a software program in the embodiment, a program corresponding to each of flowcharts illustrated in the figures
- the program code installed in the computer also implements at least one exemplary embodiment. That is, exemplary embodiments also cover a computer program used to implement the functions according to at least one exemplary embodiment.
- the system or the apparatus has the functions of the program
- the program can have any form, such as an object code, a program executed by an interpreter, or script data supplied to an operating system.
- Example of storage media used to supply the program are a floppy (registered trademark) disk, a hard disk, an optical disk, a magneto-optical disk, a CD-ROM, a CD-R, a CD-RW, a magnetic tape, a non-volatile memory card, a ROM, and a DVD (a DVD-ROM and a DVD-R).
- a client computer is connected to a website on the Internet using a browser of the client computer.
- a computer program itself according to at least one exemplary embodiment or a compressed file of the program having an automatic installing function is downloaded to a recording medium, such as a hard disk.
- the program according to at least one exemplary embodiment is supplied by dividing the program code, which constitutes the program, into a plurality of files and by then downloading the files from different home pages. That is, at least one exemplary embodiment covers a WWW server adapted to download, to a plurality of users, the program files implementing the functions according to at least one exemplary embodiment by a computer.
- the functions according to at least one exemplary embodiment can be implemented by encrypting the program according to at least one exemplary embodiment, then storing the encrypted program on a storage medium, such as a CD-ROM, subsequently distributing the storage medium to users, then causing users, who meet predetermined requirements to download decryption key information from a website through the Internet, and subsequently causing the users to decrypt the encrypted program by using the key information, thereby to install the program in a computer.
- the functions according to the exemplary embodiments can be implemented by executing a program read by the computer.
- an operating system running on the computer can perform all or a part of actual processing, so that the functions of the aforementioned exemplary embodiments can be implemented by this processing.
- a CPU mounted on the function expansion board or the function expansion unit performs all or a part of the actual processing, so that the functions of the aforementioned exemplary embodiments can be implemented by this processing.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
Description
L1-P22<L1-P11 (11)
L1-P12<L1-P21 (12)
R1-P22<R1-P11 (13)
R1-P21<R1-P12 (14)
θR1′=θR — f+Δθ1/2 (15)
θR2′=θR — e−Δθ2/2 (16)
X t(θL−45,θR−45)=(tan(θL−45)−tan(θR−45))/[2*(1−tan(θL−45)*tan(θR−45))] (17)
Y t(θL−45,θR−45)=(−1)*[(1−tan(θL−45))*(1−tan(θR−45))/(2*(1−tan(θL−45)*tan(θR−45)))−0.5] (18)
X=DLR*X t(θL−45,θR−45) (19)
Y=DLR*Y t(θL−45,θR−45) (20)
(O′→P′)x=(DLR−ΔD)*X t(θL−45,θR−45) (21)
(O′→P′)y=(DLR−ΔD)*Y t(θL−45,θR−45) (22)
ΔD=S x +S y*tan(θL) (23)
Incidentally, S x =d*cos(θS),S y =d*sin(θS) (24)
(O′→O′)x =ΔD/2 (25)
(O′→O′)y=(−1)*ΔD/2 (26)
(O″→P″)x=(DLR−2*S x)*X t(θL−45,θR−45) (27)
(O″→P″)y=(DLR−2*S x)*Y t(θL−45,θR−45) (28)
(O→O″)x=0 (29)
(O→O″)y=(−1)*(S x +S y) (30)
θcnt(L1)=(θL1−aP11+θL1−aP22)/2
θcnt(L2)=(θL2−aP11+θL2−aP22)/2
θcnt(R1)=(θR1−aP11+θL1−aP22)/2
θcnt(R2)=(θR2−aP11+θL1−aP22)/2
Claims (17)
Distance (Ps-P2)<Distance (Ps-P1); and
Distance (Ps-P3)<Distance (Ps-P4).
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005-118980 | 2005-04-15 | ||
| JP2005118980A JP4455391B2 (en) | 2005-04-15 | 2005-04-15 | Coordinate input device, control method therefor, and program |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| US20060232830A1 US20060232830A1 (en) | 2006-10-19 |
| US7515141B2 true US7515141B2 (en) | 2009-04-07 |
Family
ID=37108212
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US11/398,936 Expired - Fee Related US7515141B2 (en) | 2005-04-15 | 2006-04-05 | Coordinate input apparatus, control method therefor, and program |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7515141B2 (en) |
| JP (1) | JP4455391B2 (en) |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20090213094A1 (en) * | 2008-01-07 | 2009-08-27 | Next Holdings Limited | Optical Position Sensing System and Optical Position Sensor Assembly |
| US20100045811A1 (en) * | 2007-02-23 | 2010-02-25 | Sony Corporation | Image pickup apparatus, display-and-image-pickup apparatus and image pickup processing apparatus |
| US7751671B1 (en) * | 2009-03-25 | 2010-07-06 | Next Holdings Limited | Optical touchscreens comprising removably connected optical members |
| US20100302207A1 (en) * | 2009-05-27 | 2010-12-02 | Lan-Rong Dung | Optical Touch Control Method and Apparatus Thereof |
| US20100321340A1 (en) * | 2009-06-18 | 2010-12-23 | Quanta Computer, Inc. | System and Method of Distinguishing Multiple Touch Points |
| US20110018822A1 (en) * | 2009-07-21 | 2011-01-27 | Pixart Imaging Inc. | Gesture recognition method and touch system incorporating the same |
| US20110050649A1 (en) * | 2009-09-01 | 2011-03-03 | John David Newton | Determining the Location of Touch Points in a Position Detection System |
| US20110109565A1 (en) * | 2010-02-04 | 2011-05-12 | Hong Kong Applied Science And Technology Research Institute Co. Ltd. | Cordinate locating method, coordinate locating device, and display apparatus comprising the coordinate locating device |
| US20110170253A1 (en) * | 2010-01-13 | 2011-07-14 | Smart Technologies Ulc | Housing assembly for imaging assembly and fabrication method therefor |
| US20110176082A1 (en) * | 2010-01-18 | 2011-07-21 | Matthew Allard | Mounting Members For Touch Sensitive Displays |
| US8115753B2 (en) | 2007-04-11 | 2012-02-14 | Next Holdings Limited | Touch screen system with hover and click input methods |
| US8149221B2 (en) | 2004-05-07 | 2012-04-03 | Next Holdings Limited | Touch panel display system with illumination and detection provided from a single edge |
| US8289299B2 (en) | 2003-02-14 | 2012-10-16 | Next Holdings Limited | Touch screen signal processing |
| US20130038577A1 (en) * | 2011-08-11 | 2013-02-14 | Yu-Yen Chen | Optical touch device and coordinate detection method thereof |
| US8384693B2 (en) | 2007-08-30 | 2013-02-26 | Next Holdings Limited | Low profile touch panel systems |
| US8432377B2 (en) | 2007-08-30 | 2013-04-30 | Next Holdings Limited | Optical touchscreen with improved illumination |
| US8456447B2 (en) | 2003-02-14 | 2013-06-04 | Next Holdings Limited | Touch screen signal processing |
| US8508508B2 (en) | 2003-02-14 | 2013-08-13 | Next Holdings Limited | Touch screen signal processing with single-point calibration |
| US20140146019A1 (en) * | 2012-11-29 | 2014-05-29 | Pixart Imaging Inc. | Positioning module, optical touch system and method of calculating a coordinate of a touch medium |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7506612B2 (en) * | 2005-11-12 | 2009-03-24 | Duard W. Enoch, III | Multifunction aquarium cleaning device |
| US20120075254A1 (en) * | 2008-01-07 | 2012-03-29 | Simon James Bridger | Touch System Having An Uninterrupted Light Source |
| US20120306816A1 (en) * | 2011-06-06 | 2012-12-06 | Simon James Bridger | Simplified Optical Position Sensing Assembly |
| US20090219256A1 (en) * | 2008-02-11 | 2009-09-03 | John David Newton | Systems and Methods for Resolving Multitouch Scenarios for Optical Touchscreens |
| WO2010039663A2 (en) * | 2008-10-02 | 2010-04-08 | Next Holdings, Inc. | Stereo optical sensors for resolving multi-touch in a touch detection system |
| US8913034B2 (en) * | 2009-05-25 | 2014-12-16 | Pixart Imaging Inc. | Connector of connecting light sensor and substrate and method of fabricating light sensor |
| JP2012529113A (en) * | 2009-06-01 | 2012-11-15 | スリーエム イノベイティブ プロパティズ カンパニー | Infrared retroreflective device used for high aspect ratio optical touch panel, method of manufacturing the same, and high aspect ratio touch panel using such device |
| US9274650B2 (en) * | 2009-11-16 | 2016-03-01 | Pixart Imaging Inc. | Optical touch device and related image detecting component and locating method |
| TWI494823B (en) * | 2009-11-16 | 2015-08-01 | Pixart Imaging Inc | Locating method of optical touch device and optical touch device |
| CN102129326B (en) * | 2010-01-19 | 2015-03-25 | 原相科技股份有限公司 | Positioning method of optical touch device and optical touch device |
| CN102200860B (en) * | 2010-03-23 | 2014-02-05 | 北京汇冠新技术股份有限公司 | Touch positioning method, touch positioning device and touch system |
| KR101706778B1 (en) * | 2010-07-19 | 2017-02-27 | 엘지이노텍 주식회사 | Optical touch screen |
| KR20120012572A (en) * | 2010-08-02 | 2012-02-10 | 엘지이노텍 주식회사 | Optical touch screen |
| TWI428804B (en) * | 2010-10-20 | 2014-03-01 | Pixart Imaging Inc | Optical screen touch system and method thereof |
| CN102681728B (en) * | 2011-03-07 | 2015-03-04 | 联想(北京)有限公司 | Touch device and input method |
| CN102819356B (en) * | 2011-06-07 | 2017-05-10 | 上海科斗电子科技有限公司 | Optical touch screen system |
| CN102819355B (en) * | 2011-06-07 | 2017-05-31 | 上海科斗电子科技有限公司 | A touch screen system with an optical signal receiver in front of the touch panel |
| KR101968552B1 (en) * | 2011-11-18 | 2019-04-15 | 삼성디스플레이 주식회사 | Touch display apparatus and method of determining touch position using the same |
| CN104182086B (en) * | 2013-05-22 | 2017-04-26 | 原相科技股份有限公司 | Optical touch control device as well as relevant image detecting module and positioning method thereof |
| US9367177B2 (en) * | 2013-06-27 | 2016-06-14 | Hong Kong Applied Science and Technology Research Institute Company Limited | Method and system for determining true touch points on input touch panel using sensing modules |
| JP5970099B1 (en) * | 2015-03-19 | 2016-08-17 | 株式会社Pfu | Image reading device |
| KR101822400B1 (en) | 2015-08-31 | 2018-01-26 | 주식회사 에이에프오 | Optical touch screen apparatus and sensing method |
| TWI612445B (en) * | 2015-09-21 | 2018-01-21 | 緯創資通股份有限公司 | Optical touch apparatus and a method for determining a touch position |
| CN107544713A (en) * | 2017-08-31 | 2018-01-05 | 美的智慧家居科技有限公司 | Capacitance plate control method, device and terminal device |
| KR102019888B1 (en) * | 2019-04-05 | 2019-11-05 | 삼성디스플레이 주식회사 | Touch display apparatus and method of determining touch position using the same |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4507557A (en) | 1983-04-01 | 1985-03-26 | Siemens Corporate Research & Support, Inc. | Non-contact X,Y digitizer using two dynamic ram imagers |
| JPH03244017A (en) | 1990-02-22 | 1991-10-30 | Wacom Co Ltd | Simultaneous input device for optical system plural two-dimensional coordinates |
| JP2000105671A (en) | 1998-05-11 | 2000-04-11 | Ricoh Co Ltd | Coordinate input / detection device and electronic blackboard system |
| JP2001142642A (en) | 1999-09-03 | 2001-05-25 | Ricoh Co Ltd | Coordinate input device |
| JP2002055770A (en) | 2000-08-09 | 2002-02-20 | Ricoh Co Ltd | Coordinate input device |
| JP2003303046A (en) | 2002-04-11 | 2003-10-24 | Ricoh Elemex Corp | Optical coordinate detection device |
| US20050200613A1 (en) * | 2004-03-11 | 2005-09-15 | Katsuyuki Kobayashi | Coordinate input apparatus, its control method, and program |
| US20060232792A1 (en) * | 2005-04-15 | 2006-10-19 | Canon Kabushiki Kaisha | Coordinate input apparatus, control method thereof, and program |
| US20060232568A1 (en) * | 2005-04-15 | 2006-10-19 | Canon Kabushiki Kaisha | Coordinate input apparatus, control method thereof, and program |
-
2005
- 2005-04-15 JP JP2005118980A patent/JP4455391B2/en not_active Expired - Fee Related
-
2006
- 2006-04-05 US US11/398,936 patent/US7515141B2/en not_active Expired - Fee Related
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4507557A (en) | 1983-04-01 | 1985-03-26 | Siemens Corporate Research & Support, Inc. | Non-contact X,Y digitizer using two dynamic ram imagers |
| JPH03244017A (en) | 1990-02-22 | 1991-10-30 | Wacom Co Ltd | Simultaneous input device for optical system plural two-dimensional coordinates |
| JP2000105671A (en) | 1998-05-11 | 2000-04-11 | Ricoh Co Ltd | Coordinate input / detection device and electronic blackboard system |
| US6429856B1 (en) | 1998-05-11 | 2002-08-06 | Ricoh Company, Ltd. | Coordinate position inputting/detecting device, a method for inputting/detecting the coordinate position, and a display board system |
| US6608619B2 (en) | 1998-05-11 | 2003-08-19 | Ricoh Company, Ltd. | Coordinate position inputting/detecting device, a method for inputting/detecting the coordinate position, and a display board system |
| JP2001142642A (en) | 1999-09-03 | 2001-05-25 | Ricoh Co Ltd | Coordinate input device |
| US6570103B1 (en) | 1999-09-03 | 2003-05-27 | Ricoh Company, Ltd. | Method and apparatus for coordinate inputting capable of effectively using a laser ray |
| JP2002055770A (en) | 2000-08-09 | 2002-02-20 | Ricoh Co Ltd | Coordinate input device |
| JP2003303046A (en) | 2002-04-11 | 2003-10-24 | Ricoh Elemex Corp | Optical coordinate detection device |
| US20050200613A1 (en) * | 2004-03-11 | 2005-09-15 | Katsuyuki Kobayashi | Coordinate input apparatus, its control method, and program |
| US20060232792A1 (en) * | 2005-04-15 | 2006-10-19 | Canon Kabushiki Kaisha | Coordinate input apparatus, control method thereof, and program |
| US20060232568A1 (en) * | 2005-04-15 | 2006-10-19 | Canon Kabushiki Kaisha | Coordinate input apparatus, control method thereof, and program |
Cited By (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8456447B2 (en) | 2003-02-14 | 2013-06-04 | Next Holdings Limited | Touch screen signal processing |
| US8508508B2 (en) | 2003-02-14 | 2013-08-13 | Next Holdings Limited | Touch screen signal processing with single-point calibration |
| US8466885B2 (en) | 2003-02-14 | 2013-06-18 | Next Holdings Limited | Touch screen signal processing |
| US8289299B2 (en) | 2003-02-14 | 2012-10-16 | Next Holdings Limited | Touch screen signal processing |
| US8149221B2 (en) | 2004-05-07 | 2012-04-03 | Next Holdings Limited | Touch panel display system with illumination and detection provided from a single edge |
| US20100045811A1 (en) * | 2007-02-23 | 2010-02-25 | Sony Corporation | Image pickup apparatus, display-and-image-pickup apparatus and image pickup processing apparatus |
| US8319749B2 (en) * | 2007-02-23 | 2012-11-27 | Sony Corporation | Image pickup apparatus, display-and-image-pickup apparatus and image pickup processing apparatus |
| US8115753B2 (en) | 2007-04-11 | 2012-02-14 | Next Holdings Limited | Touch screen system with hover and click input methods |
| US8432377B2 (en) | 2007-08-30 | 2013-04-30 | Next Holdings Limited | Optical touchscreen with improved illumination |
| US8384693B2 (en) | 2007-08-30 | 2013-02-26 | Next Holdings Limited | Low profile touch panel systems |
| US8405637B2 (en) * | 2008-01-07 | 2013-03-26 | Next Holdings Limited | Optical position sensing system and optical position sensor assembly with convex imaging window |
| US8405636B2 (en) * | 2008-01-07 | 2013-03-26 | Next Holdings Limited | Optical position sensing system and optical position sensor assembly |
| US20090237376A1 (en) * | 2008-01-07 | 2009-09-24 | Next Holdings Limited | Optical Position Sensing System and Optical Position Sensor Assembly with Convex Imaging Window |
| US20090213094A1 (en) * | 2008-01-07 | 2009-08-27 | Next Holdings Limited | Optical Position Sensing System and Optical Position Sensor Assembly |
| US7751671B1 (en) * | 2009-03-25 | 2010-07-06 | Next Holdings Limited | Optical touchscreens comprising removably connected optical members |
| US20100302207A1 (en) * | 2009-05-27 | 2010-12-02 | Lan-Rong Dung | Optical Touch Control Method and Apparatus Thereof |
| US8525814B2 (en) * | 2009-06-18 | 2013-09-03 | Quanta Computer Inc. | System and method of distinguishing multiple touch points applied to an optical touch system |
| US20100321340A1 (en) * | 2009-06-18 | 2010-12-23 | Quanta Computer, Inc. | System and Method of Distinguishing Multiple Touch Points |
| US20110018822A1 (en) * | 2009-07-21 | 2011-01-27 | Pixart Imaging Inc. | Gesture recognition method and touch system incorporating the same |
| TWI501121B (en) * | 2009-07-21 | 2015-09-21 | Pixart Imaging Inc | Gesture recognition method and touch system incorporating the same |
| US20110050649A1 (en) * | 2009-09-01 | 2011-03-03 | John David Newton | Determining the Location of Touch Points in a Position Detection System |
| US7932899B2 (en) * | 2009-09-01 | 2011-04-26 | Next Holdings Limited | Determining the location of touch points in a position detection system |
| US20110170253A1 (en) * | 2010-01-13 | 2011-07-14 | Smart Technologies Ulc | Housing assembly for imaging assembly and fabrication method therefor |
| US20110176082A1 (en) * | 2010-01-18 | 2011-07-21 | Matthew Allard | Mounting Members For Touch Sensitive Displays |
| US20110109565A1 (en) * | 2010-02-04 | 2011-05-12 | Hong Kong Applied Science And Technology Research Institute Co. Ltd. | Cordinate locating method, coordinate locating device, and display apparatus comprising the coordinate locating device |
| US8937612B2 (en) * | 2010-02-04 | 2015-01-20 | Hong Kong Applied Science And Technology Research Institute Co. Ltd. | Coordinate locating method, coordinate locating device, and display apparatus comprising the coordinate locating device |
| US20130038577A1 (en) * | 2011-08-11 | 2013-02-14 | Yu-Yen Chen | Optical touch device and coordinate detection method thereof |
| US20140146019A1 (en) * | 2012-11-29 | 2014-05-29 | Pixart Imaging Inc. | Positioning module, optical touch system and method of calculating a coordinate of a touch medium |
| US9213448B2 (en) * | 2012-11-29 | 2015-12-15 | Pixart Imaging Inc. | Positioning module, optical touch system and method of calculating a coordinate of a touch medium |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006301744A (en) | 2006-11-02 |
| JP4455391B2 (en) | 2010-04-21 |
| US20060232830A1 (en) | 2006-10-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7515141B2 (en) | Coordinate input apparatus, control method therefor, and program | |
| US7432914B2 (en) | Coordinate input apparatus, its control method, and program | |
| US7589715B2 (en) | Coordinate input apparatus, control method thereof, and program | |
| US7538894B2 (en) | Coordinate input apparatus, control method thereof, and program | |
| US8780083B2 (en) | Coordinate input apparatus, control method thereof, and program | |
| US7443387B2 (en) | Coordinate input apparatus, its control method, and program | |
| US5484966A (en) | Sensing stylus position using single 1-D image sensor | |
| US8957864B2 (en) | Coordinate input apparatus and method | |
| US20110115904A1 (en) | Object-detecting system | |
| CN101807131B (en) | Detection module and optical detection system including the detection module | |
| JP4590295B2 (en) | Coordinate input device, control method therefor, and program | |
| JP4484796B2 (en) | Coordinate input device | |
| JP2006146816A (en) | Coordinate input method and apparatus | |
| JP4590296B2 (en) | Coordinate input device | |
| JP5865053B2 (en) | Coordinate input device, control method of coordinate input device, and program | |
| JP2006251877A (en) | Coordinate input device | |
| JP2006251878A (en) | Coordinate input device, coordinate input control method, and coordinate input program | |
| JP2007072508A (en) | Coordinate input device, control method therefor, and program | |
| Seko et al. | Simultaneous 3D position sensing by means of large scale spherical aberration of lens and Hough transform technique |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| AS | Assignment |
Owner name: CANON KABUSHIKI KAISHA KAISHA, JAPAN Free format text: ASSIGNMENT OF ASSIGNORS INTEREST;ASSIGNOR:KOBAYASHI, KIWAMU;REEL/FRAME:017771/0872 Effective date: 20060324 |
|
| FEPP | Fee payment procedure |
Free format text: PAYOR NUMBER ASSIGNED (ORIGINAL EVENT CODE: ASPN); ENTITY STATUS OF PATENT OWNER: LARGE ENTITY |
|
| FPAY | Fee payment |
Year of fee payment: 4 |
|
| REMI | Maintenance fee reminder mailed | ||
| LAPS | Lapse for failure to pay maintenance fees | ||
| STCH | Information on status: patent discontinuation |
Free format text: PATENT EXPIRED DUE TO NONPAYMENT OF MAINTENANCE FEES UNDER 37 CFR 1.362 |
|
| STCH | Information on status: patent discontinuation |
Free format text: PATENT EXPIRED DUE TO NONPAYMENT OF MAINTENANCE FEES UNDER 37 CFR 1.362 |
|
| FP | Lapsed due to failure to pay maintenance fee |
Effective date: 20170407 |