RU2591912C1 - Module for detecting obstacles and robot-cleaner including same - Google Patents
Module for detecting obstacles and robot-cleaner including same Download PDFInfo
- Publication number
- RU2591912C1 RU2591912C1 RU2014153133/02A RU2014153133A RU2591912C1 RU 2591912 C1 RU2591912 C1 RU 2591912C1 RU 2014153133/02 A RU2014153133/02 A RU 2014153133/02A RU 2014153133 A RU2014153133 A RU 2014153133A RU 2591912 C1 RU2591912 C1 RU 2591912C1
- Authority
- RU
- Russia
- Prior art keywords
- light
- obstacle
- obstacle detection
- detection module
- reflected
- Prior art date
Links
Images




































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/008—Manipulators for service tasks
- B25J11/0085—Cleaning
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2836—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means characterised by the parts which are controlled
- A47L9/2852—Elements for displacement of the vacuum cleaner or the accessories therefor, e.g. wheels, casters or nozzles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/021—Optical sensing devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V8/00—Prospecting or detecting by optical means
- G01V8/10—Detecting, e.g. by using light barriers
- G01V8/12—Detecting, e.g. by using light barriers using one transmitter and one receiver
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B17/00—Systems with reflecting surfaces, with or without refracting elements
- G02B17/08—Catadioptric systems
- G02B17/0856—Catadioptric systems comprising a refractive element with a reflective surface, the reflection taking place inside the element, e.g. Mangin mirrors
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B17/00—Systems with reflecting surfaces, with or without refracting elements
- G02B17/08—Catadioptric systems
- G02B17/0864—Catadioptric systems having non-imaging properties
- G02B17/0876—Catadioptric systems having non-imaging properties for light collecting, e.g. for use with a detector
- G02B17/088—Catadioptric systems having non-imaging properties for light collecting, e.g. for use with a detector specially adapted to receive light from a 360° plane or hemisphere
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B3/00—Simple or compound lenses
- G02B3/02—Simple or compound lenses with non-spherical faces
- G02B3/06—Simple or compound lenses with non-spherical faces with cylindrical or toric faces
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/04—Automatic control of the travelling movement; Automatic obstacle detection
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Optics & Photonics (AREA)
- Robotics (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Geophysics (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Electric Vacuum Cleaner (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Transforming Electric Information Into Light Information (AREA)
- Electrically Operated Instructional Devices (AREA)
- Television Receiver Circuits (AREA)
Abstract
Description
Область техникиTechnical field
Варианты реализации относятся к модулю обнаружения препятствий, способному обнаруживать находящиеся вокруг препятствия, и к роботу-уборщику, включающему в себя таковой. Embodiments relate to an obstacle detection module capable of detecting obstacles around it, and to a robot cleaner including one.
Уровень техникиState of the art
В общем случае датчик препятствий излучает световые, ультразвуковые волны, или им подобные, и обнаруживает световые или ультразвуковые волны, возвращенные после отражения от препятствия, в форме обнаруженных сигналов. Основываясь на разности по времени, разности фаз или разности интенсивностей среди обнаруженных сигналов, датчик препятствий распознает, существует ли препятствие, и определяет расстояние от датчика до препятствия. Датчик препятствий может определить расстояние от датчика до препятствия, основываясь на углах отражения отражаемых световых или ультразвуковых волн.In general, an obstacle sensor emits light, ultrasound waves, or the like, and detects light or ultrasound waves returned after reflection from an obstacle in the form of detected signals. Based on the time difference, phase difference, or intensity difference among the detected signals, the obstacle sensor detects if an obstacle exists and determines the distance from the sensor to the obstacle. The obstacle sensor can determine the distance from the sensor to the obstacle based on the reflection angles of the reflected light or ultrasonic waves.
Недавно был предложен способ обнаружения препятствий, использующий точечный источник света. Однако при использовании точечного источника света необходимо устанавливать множество излучателей света, и может образовываться зона отсутствия чувствительности несмотря на установку такого множества излучателей света. Когда точечный источник света выполняется поворотным для решения упомянутых выше проблем, необходимо использовать отдельный сервомеханизм. Кроме того, требуется определенное время для сканирования. По этой причине может происходить ухудшение эффективности.Recently, an obstacle detection method using a point light source has been proposed. However, when using a point light source, it is necessary to install a plurality of light emitters, and a zone of lack of sensitivity may be formed despite the installation of such a plurality of light emitters. When a point light source is rotated to solve the problems mentioned above, a separate servo mechanism must be used. In addition, it takes some time to scan. For this reason, performance degradation may occur.
ОписаниеDescription
Техническая проблемаTechnical problem
В аспекте одного или более вариантов осуществления обеспечены модуль обнаружения препятствий, способный обнаруживать находящиеся вокруг препятствия, путем формирования равномерно распределенного плоского света (planar light - см. определение ниже), используя широкоугольную линзу, и робот-уборщик, использующий таковой.In an aspect of one or more embodiments, an obstacle detection module is provided that is capable of detecting obstacles around it by generating uniformly distributed flat light (planar light — see definition below) using a wide angle lens and a robot cleaner using it.
Техническое решениеTechnical solution
В аспекте одного или более вариантов осуществления обеспечен робот-уборщик, который включает в себя корпус, приводное устройство для приведения в движение корпуса, модуль обнаружения препятствий для обнаружения препятствий, находящихся вокруг корпуса, и устройство управления для управления приводным устройством, основываясь на результатах, полученных модулем обнаружения препятствий, причем этот модуль обнаружения препятствий включает в себя по меньшей мере один излучатель света, включающий в себя источник света, широкоугольную линзу для преломления или отражения света, падающего от источника света, с целью рассеяния падающего света в виде плоского света и возбуждающее устройство источника света, побуждающее источник света излучать свет, и приемник света, включающий в себя отражающее зеркало для отражения отраженного света, отражаемого препятствием, с целью генерации отраженного света, оптическую линзу, отстоящую от отражающего зеркала на заданное расстояние, чтобы позволить отраженному свету проходить через оптическую линзу, датчик изображений для приема отраженного света, выходящего из оптической линзы, и генерации сигнала изображения из отраженного света, выходящего из оптической линзы, и схему обработки изображений для приема сигнала изображения и преобразования принятого сигнала изображения в сигнал изображения в форме цифрового сигнала изображения.In an aspect of one or more embodiments, a robot cleaner is provided that includes a housing, a drive device for driving the housing, an obstacle detection module for detecting obstacles surrounding the housing, and a control device for controlling the drive device based on the results obtained an obstacle detection module, wherein this obstacle detection module includes at least one light emitter including a light source, a wide-angle lens for refracting or reflecting light incident from a light source, for scattering incident light in the form of a plane light, and a light source driving device causing a light source to emit light, and a light receiver including a reflective mirror for reflecting reflected light reflected by an obstacle, the purpose of generating reflected light, an optical lens spaced a predetermined distance from the reflecting mirror to allow reflected light to pass through the optical lens, an image sensor for receiving a reflection Nogo light exiting from the optical lens and generating an image signal from the reflected light exiting from the optical lens, and an image processing circuit for receiving an image signal and converting the received image signal into an image signal in the form of a digital image signal.
Модуль обнаружения препятствий может дополнительно включать в себя контроллер обнаружения препятствий для генерации оптических сигналов управления с целью управления включением/выключением источника света и для генерации информации по обнаружению препятствий, основываясь на цифровом сигнале изображения.The obstacle detection module may further include an obstacle detection controller for generating optical control signals for controlling the on / off light source and for generating obstacle detection information based on the digital image signal.
Устройство управления может генерировать сигнал управления приводным устройством, основываясь на информации по обнаружению препятствий.The control device may generate a control signal of the drive device based on the obstacle detection information.
Устройство управления может генерировать оптические сигналы управления для управления включением/выключением источника света, может генерировать информацию по обнаружению препятствий, основываясь на цифровом сигнале изображения, или может генерировать сигнал управления приводным устройством, основываясь на информации по обнаружению препятствий. Информация по обнаружению препятствия может включать в себя по меньшей мере либо расстояние от корпуса до препятствия, либо положение препятствия, либо высоту препятствия, либо форму препятствия, либо точку падения.The control device may generate optical control signals for controlling on / off of the light source, may generate obstacle detection information based on a digital image signal, or may generate a control signal of the drive device based on the obstacle detection information. Information on detecting an obstacle may include at least either the distance from the body to the obstacle, or the position of the obstacle, or the height of the obstacle, or the shape of the obstacle, or the point of incidence.
Оптический сигнал управления для управления включением/выключением источника света может генерироваться, когда робот-уборщик поднимается с пола.An optical control signal for controlling the on / off light source can be generated when the robot cleaner rises from the floor.
Оптический сигнал управления для управления включением/выключением источника света может генерироваться, когда робот-уборщик начинает движение, и оптический сигнал управления для управления включением/выключением источника света может генерироваться, когда робот-уборщик заканчивает движение.An optical control signal for controlling on / off of the light source can be generated when the robot cleaner starts moving, and an optical control signal for controlling on / off of the light source can be generated when the robot cleaner stops moving.
В аспекте одного или более вариантов осуществления обеспечен робот-уборщик, который включает в себя корпус, приводное устройство для приведения в движение корпуса, модуль обнаружения препятствий для обнаружения препятствий, находящихся вокруг корпуса, и устройство управления для управления приводным устройством, основываясь на полученных модулем обнаружения препятствий результатах, причем этот модуль обнаружения препятствий включает в себя по меньшей мере один излучатель света, включающий в себя источник света и широкоугольную линзу для рассеяния света, падающего от источника света, в форме плоского света, и приемник света, включающий в себя датчик изображений для приема отраженного света, отражаемого препятствием, и для генерации сигнала изображения из принятого отраженного света.In an aspect of one or more embodiments, a robot cleaner is provided that includes a housing, a drive device for driving the housing, an obstacle detection module for detecting obstacles around the housing, and a control device for controlling the drive device based on the received detection module obstacle results, wherein this obstacle detection module includes at least one light emitter including a light source and a wide-angle lens y for scattering light incident from the light source in the form of a plane light, and a light detector including an image sensor for receiving reflected light reflected by the obstacle, and for generating an image signal from the received reflected light.
В аспекте одного или более вариантов осуществления обеспечен модуль обнаружения препятствий, устанавливаемый в роботе-уборщике, который включает в себя по меньшей мере один излучатель света, включающий в себя источник света, широкоугольную линзу для преломления или отражения света, падающего от источника света, с целью рассеяния падающего света в форме плоского света и устройство возбуждения источника света, побуждающее источник света излучать свет, и приемник света, включающий в себя отражающее зеркало для отражения отраженного света, отражаемого препятствием, с целью генерации отраженного света, оптическую линзу, отстоящую от отражающего зеркала на заданное расстояние, чтобы позволить отраженному свету проходить через оптическую линзу, датчик изображений для приема отраженного света, выходящего из оптической линзы, с целью генерации сигнала изображения из отраженного света, выходящего от оптической линзы, и схему обработки изображений для приема сигнала изображения и преобразования принятого сигнала изображения в сигнал изображения в форме цифрового сигнала изображения.In an aspect of one or more embodiments, an obstruction detection module is provided that is mounted in a cleaning robot that includes at least one light emitter including a light source, a wide-angle lens for refracting or reflecting light incident from a light source, for the purpose scattering incident light in the form of a flat light and a light source driving device for causing a light source to emit light, and a light receiver including a reflective mirror for reflecting reflected light reflected by an obstacle in order to generate reflected light, an optical lens spaced apart from the reflecting mirror by a predetermined distance to allow reflected light to pass through the optical lens, an image sensor for receiving reflected light coming out of the optical lens in order to generate an image signal from reflected light output from the optical lens and an image processing circuit for receiving an image signal and converting the received image signal into an image signal in the form of a digital signal from mapping.
Излучатель света может дополнительно включать в себе прорезь, расположенную перед широкоугольной линзой, для регулировки толщины плоского света.The light emitter may further include a slot located in front of the wide-angle lens to adjust the thickness of the plane light.
Оптическая линия может располагаться между отражающим зеркалом и датчиком изображений, а излучатель света может располагаться перед датчиком изображений.An optical line may be located between the reflective mirror and the image sensor, and a light emitter may be located in front of the image sensor.
По меньшей мере один излучатель света может включать в себя множество излучателей света, расположенных в разных позициях на роботе-уборщике и находящихся на одном и том же уровне от пола.At least one light emitter may include a plurality of light emitters located in different positions on the robot cleaner and located at the same level from the floor.
Множество излучателей света может рассеивать плоский свет в одновременном или последовательном порядке.Many light emitters can scatter flat light in simultaneous or sequential order.
Множество излучателей света может включать в себя от первого до третьего излучателей света, расположенных на роботе-уборщике. Приемник света может располагаться на передней стороне робота-уборщика. Первый излучатель света может располагаться перед приемником света. Второй излучатель света может быть отнесен от первого излучателя света влево на заданное расстояние. Третий излучатель света может быть отнесен от первого излучателя света вправо на заданное расстояние.A plurality of light emitters may include first to third light emitters located on the cleaning robot. The light receiver may be located on the front side of the robot cleaner. The first light emitter may be located in front of the light receiver. The second light emitter may be carried away from the first light emitter to the left by a predetermined distance. The third light emitter can be attributed from the first light emitter to the right by a predetermined distance.
Множество излучателей света может включать в себя от первого до четвертого излучателей света, расположенных на роботе-уборщике. Приемник света может располагаться на передней стороне робота-уборщика. Первый и второй излучатели света могут быть отнесены от приемника света влево на заданное расстояние. Третий и четвертый излучатели света могут быть отнесены от приемника света вправо на заданное расстояние.A plurality of light emitters may include from first to fourth light emitters located on the cleaning robot. The light receiver may be located on the front side of the robot cleaner. The first and second light emitters can be carried from the light receiver to the left by a predetermined distance. The third and fourth light emitters can be carried to the right by a predetermined distance from the light receiver.
Отражающее зеркало может быть коническим отражающим зеркалом, расположенным таким образом, чтобы вершина конического отражающего зеркала была обращена в сторону датчика изображений.The reflecting mirror may be a conical reflecting mirror arranged so that the apex of the conical reflecting mirror faces toward the image sensor.
Отражающее зеркало может иметь коническую структуру, образованную конической поверхностью, имеющей боковой участок поверхности, продолжающийся от нижней поверхности конической поверхности на заданную высоту и имеющий коническую форму, и боковой участок поверхности, продолжающийся от заданной высоты к вершине конической структуры и имеющий выпуклую форму.A reflecting mirror may have a conical structure formed by a conical surface having a lateral surface portion extending from a lower surface of the conical surface to a predetermined height and having a conical shape, and a lateral surface portion extending from a predetermined height to the top of the conical structure and having a convex shape.
Фильтр может быть нанесен на поверхность оптического датчика, на поверхность отражающего зеркала или на поверхность оптической линзы, чтобы позволить свету, имеющему длину волны плоского света, проходить через оптическую линзу.The filter may be applied to the surface of the optical sensor, to the surface of a reflective mirror, or to the surface of an optical lens to allow light having a wavelength of plane light to pass through the optical lens.
Модуль обнаружения препятствий может дополнительно включать в себя контроллер обнаружения препятствий для генерации оптических сигналов управления с целью управления включением/выключением источника света и для генерации информации по обнаружению препятствий, основываясь на цифровом сигнале изображения.The obstacle detection module may further include an obstacle detection controller for generating optical control signals for controlling the on / off light source and for generating obstacle detection information based on the digital image signal.
Информация по обнаружению препятствий может включать в себя по меньшей мере либо расстояние от корпуса до препятствия, либо положение препятствия, либо высоту препятствия, либо форму препятствия, либо точку падения.Information on detecting obstacles may include at least either the distance from the body to the obstacle, or the position of the obstacle, or the height of the obstacle, or the shape of the obstacle, or the point of incidence.
В аспекте одного или более вариантов осуществления обеспечена широкоугольная линза, выполненная из прозрачного материала, чтобы позволить свету, падающему от источника света, проходить через нее. Широкоугольная линза включает в себя первую рассеивающую поверхность для преломления света, падающего от источника света, с целью рассеяния падающего света в пределах широкоугольной линзы, вторую рассеивающую поверхность для преломления или отражения света, преломленного первой рассеивающей поверхностью, с целью генерации плоского света, и удерживающую полость, образованную на поверхности, противоположной первой рассеивающей поверхности, для удержания источника света, расположенного в ней.In an aspect of one or more embodiments, a wide-angle lens made of a transparent material is provided to allow light incident from a light source to pass through it. The wide-angle lens includes a first diffusing surface for refracting light incident from a light source to scatter incident light within the wide-angle lens, a second diffusing surface for refracting or reflecting light refracted by the first diffusing surface to generate a flat light, and a holding cavity formed on a surface opposite the first scattering surface to hold a light source located therein.
Широкоугольная линза может дополнительно включать в себя третью рассеивающую поверхность для преломления света, преломленного первой рассеивающей поверхностью, или света, отраженного второй рассеивающей поверхностью, с целью генерации плоского света.The wide-angle lens may further include a third scattering surface for refracting light refracted by the first scattering surface or light reflected by the second scattering surface in order to generate plane light.
Вторая рассеивающая поверхность может быть образована на одной поверхности второй широкоугольной линзы, чтобы иметь U-образную или V-образную вогнутую структуру.A second scattering surface may be formed on one surface of the second wide-angle lens to have a U-shaped or V-shaped concave structure.
Вторая рассеивающая поверхность может включать в себя первую поверхность, образованную в центральном участке второй рассеивающей поверхности и продолжающуюся перпендикулярно в прямом направлении в форме плоской поверхности, и вторые поверхности, имеющие криволинейную форму и образующие заданный угол по отношению к первой поверхности. Первая поверхность может преломлять свет, отраженный первой рассеивающей поверхностью, для генерации плоского света. Вторые поверхности могут отражать в направлении третьих рассеивающих поверхностей свет, отраженный первой рассеивающей поверхностью. The second scattering surface may include a first surface formed in a central portion of the second scattering surface and extending perpendicularly in the forward direction in the form of a flat surface, and second surfaces having a curved shape and forming a predetermined angle with respect to the first surface. The first surface can refract the light reflected by the first scattering surface to generate plane light. The second surfaces may reflect in the direction of the third scattering surfaces the light reflected by the first scattering surface.
Диапазон рассеяния плоского света может регулироваться в соответствии с заданным углом кривизны криволинейной формы.The scattering range of plane light can be adjusted in accordance with a predetermined curvature angle of curvilinear shape.
Вторая рассеивающая поверхность может быть образована волнообразными контурами, каждый из которых имеет сходящий на конус гребень.The second scattering surface can be formed by wave-like contours, each of which has a ridge converging on a cone.
Вторая рассеивающая поверхность может быть образована на одной поверхности широкоугольной линзы и иметь вогнутую коническую форму. Удерживающая полость может иметь центральную ось, выровненную с центральной осью второй рассеивающей поверхности.The second scattering surface may be formed on one surface of the wide-angle lens and have a concave conical shape. The holding cavity may have a central axis aligned with the central axis of the second scattering surface.
Полезные эффектыBeneficial effects
В соответствии с модулем обнаружения препятствий может быть сформирован плоский свет, и тем самым будет повышена точность обнаружения препятствия. При этом препятствие, находящееся в окружающей среде, обнаруживается за счет использования плоского света, поэтому не требуется устанавливать множество датчиков или дополнительный сервомеханизм, что повышает экономическую и структурную эффективность.According to the obstacle detection module, a flat light can be generated, and thereby the accuracy of the detection of obstacles will be improved. In this case, an obstacle in the environment is detected by the use of flat light, therefore, it is not necessary to install many sensors or an additional servomechanism, which increases economic and structural efficiency.
Описание чертежейDescription of drawings
Эти и/или другие аспекты станут очевидными и более легко понятными из последующего описания вариантов осуществления, взятых в сочетании с прилагаемыми чертежами, на которых:These and / or other aspects will become apparent and more easily understood from the following description of embodiments taken in conjunction with the accompanying drawings, in which:
ФИГ. 1 - общее представление робота-уборщика, включающего в себя модуль обнаружения препятствий согласно типовому варианту осуществления;FIG. 1 is an overview of a robot cleaner including an obstacle detection module according to an exemplary embodiment;
ФИГ. 2A - блок-схема, иллюстрирующая конфигурацию системы управления робота-уборщика, который включает в себя модуль обнаружения препятствий согласно типовому варианту осуществления;FIG. 2A is a block diagram illustrating a configuration of a robot cleaner control system that includes an obstacle detection module according to an exemplary embodiment;
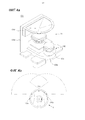
ФИГ. 2B - вид в перспективе робота-уборщика, включающего в себя модуль обнаружения препятствий согласно типовому варианту осуществления;FIG. 2B is a perspective view of a robot cleaner including an obstacle detection module according to an exemplary embodiment;
ФИГ. 2C -вид сзади робота-уборщика, включающего в себя модуль обнаружения препятствий согласно типовому варианту осуществления;FIG. 2C is a rear view of a robot cleaner including an obstacle detection module according to an exemplary embodiment;
ФИГ. 2D - вид в перспективе, иллюстрирующий модуль обнаружения препятствий согласно типовому варианту осуществления;FIG. 2D is a perspective view illustrating an obstacle detection module according to an exemplary embodiment;
ФИГ. 3A - блок-схема, иллюстрирующая конфигурацию системы управления модуля обнаружения препятствий согласно типовому варианту осуществления;FIG. 3A is a block diagram illustrating a configuration of a control system of an obstacle detection module according to an exemplary embodiment;
ФИГ. 3B - вид, иллюстрирующий пример, в котором модуль обнаружения препятствий генерирует плоскую световую волну согласно типовому варианту осуществления;FIG. 3B is a view illustrating an example in which an obstacle detection module generates a plane light wave according to an exemplary embodiment;
ФИГ. 3C - вид, иллюстрирующий пример, в котором модуль обнаружения препятствий генерирует плоский свет согласно типовому варианту осуществления;FIG. 3C is a view illustrating an example in which an obstacle detection module generates plane light according to an exemplary embodiment;
ФИГ. 4A - вид, на котором представлена внешняя конфигурация модуля обнаружения препятствий согласно типовому варианту осуществления;FIG. 4A is a view showing an external configuration of an obstacle detection module according to an exemplary embodiment;
ФИГ. 4B - вид, иллюстрирующий диапазон обзора робота-уборщика, когда два излучателя света, включенные в состав модуля обнаружения препятствий, установлены в разных позициях согласно типовому варианту осуществления;FIG. 4B is a view illustrating a viewing range of a robot cleaner when two light emitters included in an obstacle detection module are installed in different positions according to a typical embodiment;
ФИГ.4C - вид, иллюстрирующий диапазон обзора робота-уборщика, когда модуль обнаружения препятствий включает в себя три излучателя света согласно типовому варианту осуществления;FIG. 4C is a view illustrating a viewing range of a robot cleaner when an obstacle detection module includes three light emitters according to an exemplary embodiment;
ФИГ. 4D - вид, иллюстрирующий диапазон обзора робота-уборщика, когда модуль обнаружения препятствий включает в себя четыре излучателя света согласно типовому варианту осуществления;FIG. 4D is a view illustrating a viewing range of a robot cleaner when an obstacle detection module includes four light emitters according to an exemplary embodiment;
ФИГ. 5A - вид, иллюстрирующий приемник света, включенный в состав модуля обнаружения препятствий согласно типовому варианту осуществления, и изображение, принимаемое приемником света; FIG. 5A is a view illustrating a light receiver included in an obstacle detection module according to an exemplary embodiment, and an image received by a light receiver;
ФИГ. 5B - вид, иллюстрирующий первый пример отражающего зеркала, включенного в состав приводимого в качестве примера приемника света в модуле обнаружения препятствий согласно типовому варианту осуществления, и изображение, принимаемое отражающим зеркалом;FIG. 5B is a view illustrating a first example of a reflective mirror included in an exemplary light receiver in an obstacle detection module according to an exemplary embodiment, and an image received by a reflective mirror;
ФИГ. 5C - вид, иллюстрирующий второй пример отражающего зеркала, включенного в состав приводимого в качестве примера приемника света в модуле обнаружения препятствий согласно типовому варианту осуществления, и изображение, принимаемое отражающим зеркалом;FIG. 5C is a view illustrating a second example of a reflective mirror included in an exemplary light receiver in an obstacle detection module according to an exemplary embodiment, and an image received by a reflective mirror;
ФИГ. 5D - вид, иллюстрирующий третий пример отражающего зеркала, включенного в состав приводимого в качестве примера приемника света в модуле обнаружения препятствий согласно типовому варианту осуществления, и изображение, принимаемое отражающим зеркалом;FIG. 5D is a view illustrating a third example of a reflective mirror included in an exemplary light receiver in an obstacle detection module according to an exemplary embodiment, and an image received by a reflective mirror;
ФИГ. 5E - вид, иллюстрирующий четвертый пример отражающего зеркала, включенного в состав приводимого в качестве примера приемника света в модуле обнаружения препятствий согласно типовому варианту осуществления, и изображение, принимаемое отражающим зеркалом;FIG. 5E is a view illustrating a fourth example of a reflective mirror included in an exemplary light receiver in an obstacle detection module according to an exemplary embodiment, and an image received by a reflective mirror;
ФИГ. 5F - вид, иллюстрирующий пятый пример отражающего зеркала, включенного в состав приводимого в качестве примера приемника света в модуле обнаружения препятствий согласно типовому варианту осуществления, и изображение, принимаемое отражающим зеркалом;FIG. 5F is a view illustrating a fifth example of a reflective mirror included in an exemplary light receiver in an obstacle detection module according to an exemplary embodiment, and an image received by a reflective mirror;
ФИГ. 6A - вид, иллюстрирующий другой пример приемника света в модуле обнаружения препятствий согласно типовому варианту осуществления;FIG. 6A is a view illustrating another example of a light receiver in an obstacle detection module according to an exemplary embodiment;
ФИГ. 6B - вид, соответствующий области F на фиг. 6A;FIG. 6B is a view corresponding to region F in FIG. 6A;
ФИГ. 6C - вид сечения по линии G-G′ на фиг. 6A;FIG. 6C is a sectional view taken along line G-G ′ in FIG. 6A;
ФИГ. 6D - вид, иллюстрирующий диапазон обзора робота-уборщика, включающего в себя приводимый в качестве примера приемник света согласно типовому варианту осуществления на фиг. 6A;FIG. 6D is a view illustrating a viewing range of a robot cleaner including an exemplary light receiver according to the exemplary embodiment of FIG. 6A;
ФИГ. 6E - график, поясняющий определение расстояния до препятствия роботом-уборщиком, который включает в себя другой пример приемника света в модуле обнаружения препятствий согласно типовому варианту осуществления;FIG. 6E is a graph explaining the determination of the distance to an obstacle by a robot cleaner that includes another example of a light receiver in an obstacle detection module according to an exemplary embodiment;
ФИГ. 7A - вид, иллюстрирующий первую приводимую в качестве примера широкоугольную линзу, включенную в состав модуля обнаружения препятствий, согласно типовому варианту осуществления;FIG. 7A is a view illustrating a first exemplary wide-angle lens included in an obstacle detection module according to an exemplary embodiment;
ФИГ. 7B - вид, иллюстрирующий рассеяние плоского света, выходящего из первой приводимой в качестве примера широкоугольной линзы, включенной в состав модуля обнаружения препятствий, согласно типовому варианту осуществления;FIG. 7B is a view illustrating the scattering of plane light emerging from a first exemplary wide-angle lens included in an obstacle detection module according to an exemplary embodiment;
ФИГ. 7C - вид, иллюстрирующий состояние, в котором первая широкоугольная линза согласно типовому варианту осуществления установлена в модуле обнаружения препятствий.FIG. 7C is a view illustrating a state in which a first wide-angle lens according to an exemplary embodiment is installed in an obstacle detection module.
ФИГ. 7D - вид, иллюстрирующий вторую широкоугольную линзу, включенную в состав модуля обнаружения препятствий согласно типовому варианту осуществления;FIG. 7D is a view illustrating a second wide-angle lens included in an obstacle detection module according to an exemplary embodiment;
ФИГ. 7E - вид, иллюстрирующий рассеяние плоского света, выходящего из второй широкоугольной линзы, включенной в состав модуля обнаружения препятствий, согласно типовому варианту осуществления;FIG. 7E is a view illustrating the scattering of plane light exiting from a second wide-angle lens included in an obstacle detection module according to an exemplary embodiment;
ФИГ. 7F - вид, иллюстрирующий третью широкоугольную линзу, включенную в состав модуля обнаружения препятствий, согласно типовому варианту осуществления;FIG. 7F is a view illustrating a third wide-angle lens included in an obstacle detection module according to an exemplary embodiment;
ФИГ. 7G - вид, иллюстрирующий рассеяние плоского света, выходящего из третьей широкоугольной линзы, включенной в состав модуля обнаружения препятствий, согласно типовому варианту осуществления;FIG. 7G is a view illustrating the scattering of plane light exiting from a third wide-angle lens included in an obstacle detection module according to an exemplary embodiment;
ФИГ. 8A - вид в перспективе в разобранном состоянии, представляющий четвертую широкоугольную линзу, включенную в состав модуля обнаружения препятствий, согласно типовому варианту осуществления;FIG. 8A is an exploded perspective view showing a fourth wide angle lens included in an obstacle detection module according to an exemplary embodiment;
ФИГ. 8B - вид в перспективе, представляющий четвертую широкоугольную линзу, включенную в состав модуля обнаружения препятствий, согласно типовому варианту осуществления;FIG. 8B is a perspective view showing a fourth wide-angle lens included in an obstacle detection module according to an exemplary embodiment;
ФИГ. 8C - вид, иллюстрирующий рассеяние плоского света, выходящего из четвертой широкоугольной линзы, включенной в состав модуля обнаружения препятствий, согласно типовому варианту осуществления;FIG. 8C is a view illustrating the scattering of plane light exiting from a fourth wide-angle lens included in an obstacle detection module according to an exemplary embodiment;
ФИГ. 8D - вид, иллюстрирующий состояние, в котором четвертая широкоугольная линза согласно типовому варианту осуществления установлена в модуле обнаружения препятствий.FIG. 8D is a view illustrating a state in which a fourth wide-angle lens according to an exemplary embodiment is installed in an obstacle detection module.
ФИГ. 9A - вид, представляющий прорезь, способную регулировать толщину плоского света, когда используется одна из первой до третьей широкоугольных линз, согласно типовому варианту осуществления;FIG. 9A is a view showing a slot capable of adjusting the thickness of a plane light when one of the first to third wide angle lenses is used, according to a typical embodiment;
ФИГ. 9B - вид, представляющий прорезь, способную регулировать толщину плоского света, когда используется четвертая широкоугольная линза, согласно типовому варианту осуществления;FIG. 9B is a view showing a slot capable of adjusting the thickness of a plane light when a fourth wide-angle lens is used, according to a typical embodiment;
ФИГ. 10A - вид, представляющий результаты обнаружения препятствий, которые получены при большом размере прорези в модуле обнаружения препятствий, согласно типовому варианту осуществления;FIG. 10A is a view showing obstacle detection results that are obtained with a large slot size in the obstacle detection module according to an exemplary embodiment;
ФИГ. 10B - вид, представляющий результаты обнаружения препятствий, которые получены при малом размере прорези в модуле обнаружения препятствий, согласно типовому варианту осуществления;FIG. 10B is a view showing obstacle detection results that are obtained with a small slot size in an obstacle detection module according to an exemplary embodiment;
ФИГ. 11 - схематическое изображение, иллюстрирующее соотношение между каждым составляющим элементом модуля обнаружения препятствий и препятствием для вычисления расстояния до препятствия, согласно типовому варианту осуществления;FIG. 11 is a schematic diagram illustrating a relationship between each constituent element of an obstacle detection module and an obstacle for calculating a distance to an obstacle according to an exemplary embodiment;
ФИГ. 12A - вид сверху модуля обнаружения препятствий, соответствующего типовому варианту осуществления, и препятствий;FIG. 12A is a plan view of an obstacle detection module according to an exemplary embodiment and obstacles;
ФИГ. 12B - вид сбоку модуля обнаружения препятствий, соответствующего типовому варианту осуществления, и препятствий;FIG. 12B is a side view of an obstacle detection module according to an exemplary embodiment and obstacles;
ФИГ. 12C - вид изображений, принятых датчиком изображений в модуле обнаружения препятствий, согласно типовому варианту осуществления;FIG. 12C is a view of images received by the image sensor in the obstacle detection module according to an exemplary embodiment;
ФИГ. 13A - вид сверху множества излучателей света, которые включены в состав модуля обнаружения препятствий, когда они установлены в позициях, имеющих разные уровни, согласно типовому варианту осуществления, и препятствия;FIG. 13A is a plan view of a plurality of light emitters that are included in an obstacle detection module when they are installed in positions having different levels, according to a typical embodiment, and an obstacle;
ФИГ. 13B - вид сбоку множества излучателей света, которые включены в состав модуля обнаружения препятствий, когда они установлены в позициях, имеющих разные уровни, согласно типовому варианту осуществления, и препятствия;FIG. 13B is a side view of a plurality of light emitters that are included in an obstacle detection module when they are installed in positions having different levels, according to a typical embodiment, and an obstacle;
ФИГ. 13C - вид плоского света, принятого датчиком изображений в форме изображения после излучения от каждого из множества излучателей света, включенных в состав модуля обнаружения препятствий и установленных на разных уровнях, и отражения препятствием, согласно типовому варианту осуществления;FIG. 13C is a view of a planar light received by an image sensor in the form of an image after radiation from each of a plurality of light emitters included in an obstacle detection module and installed at different levels and reflected by an obstacle, according to a typical embodiment;
ФИГ. 14 - вид сверху множества излучателей света, включенных в состав модуля обнаружения препятствий, когда они установлены в разных позициях, согласно типовому варианту осуществления;FIG. 14 is a plan view of a plurality of light emitters included in an obstacle detection module when they are installed in different positions, according to a typical embodiment;
ФИГ. 15A - вид сбоку, иллюстрирующий расположение, в котором вторая широкоугольная линза расположена вертикально, чтобы позволить модулю обнаружения препятствий обнаруживать точку падения, согласно типовому варианту осуществления;FIG. 15A is a side view illustrating an arrangement in which a second wide-angle lens is positioned vertically to allow an obstacle detection module to detect a falling point, according to an exemplary embodiment;
ФИГ. 15B - вид сбоку, иллюстрирующий расположение, в котором четвертая широкоугольная линза расположена вертикально, чтобы позволить модулю обнаружения препятствий обнаруживать точку падения, согласно типовому варианту осуществления;FIG. 15B is a side view illustrating an arrangement in which a fourth wide-angle lens is positioned vertically to allow an obstacle detection module to detect a point of incidence, according to an exemplary embodiment;
ФИГ. 16A - изображение состояния, в котором модуль обнаружения препятствий излучает плоский свет при отсутствии точки падения, согласно типовому варианту осуществления;FIG. 16A is a view of a state in which an obstacle detection module emits flat light when there is no incidence point, according to an exemplary embodiment;
ФИГ. 16B - вид, иллюстрирующий изображение плоского света, принятое датчиком изображений после отражения от пола при отсутствии точки падения, согласно типовому варианту осуществления;FIG. 16B is a view illustrating a plane light image received by the image sensor after reflection from the floor in the absence of a point of incidence, according to an exemplary embodiment;
ФИГ. 17A - изображение состояния, в котором модуль обнаружения препятствий излучает плоский свет, когда существует точка падения, согласно типовому варианту осуществления;FIG. 17A is a view of a state in which an obstacle detection module emits flat light when an incidence point exists, according to an exemplary embodiment;
ФИГ. 17B - вид, иллюстрирующий изображение плоского света, принятое датчиком изображений после отражения от пола, когда существует точка падения, согласно типовому варианту осуществления.FIG. 17B is a view illustrating a plane light image received by the image sensor after reflection from the floor when there is a point of incidence, according to an exemplary embodiment.
ПРЕДПОЧТИТЕЛЬНЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯBEST MODE FOR CARRYING OUT THE INVENTION
Типовой вариант осуществления, описанный в настоящем описании, и конфигурации, показанные на чертежах, приведены просто в качестве примера, и возможны их различные модификации. Далее будут подробно рассмотрены варианты осуществления, примеры которых представлены на прилагаемых чертежах, на которых все подобные элементы обозначены одинаковыми ссылочными позициями.The exemplary embodiment described herein and the configurations shown in the drawings are merely exemplary, and various modifications are possible. Next will be considered in detail embodiments, examples of which are presented in the accompanying drawings, in which all such elements are denoted by the same reference position.
Ниже варианты осуществления будут описаны со ссылками на прилагаемые чертежи.Below, embodiments will be described with reference to the accompanying drawings.
На фиг. 1 в общем виде представлен робот-уборщик, включающий в себя модуль обнаружения препятствий согласно типовому варианту осуществления.In FIG. 1 is an overview of a robot cleaner including an obstacle detection module according to an exemplary embodiment.
Как показано на фиг. 1, робот-уборщик согласно типовому варианту осуществления, обозначенный ссылочной позицией “1”, является устройством для автоматического очищения зоны, которую он будет очищать засасыванием сорных веществ, таких как пыль, с пола очищаемой зоны, автоматически передвигаясь вокруг очищаемой зоны без управления пользователем. Робот-уборщик 1 обнаруживает препятствие или стену, которые расположены внутри подлежащей очищению зоны, посредством различных датчиков или подобных устройств. Основываясь на полученных результатах, робот-уборщик 1 управляет путем своего передвижения и своей очищающей работой. Конкретно, робот-уборщик 1 излучает плоский свет, передвигаясь внутри помещения, и обнаруживает препятствия, встречающиеся на его пути, вдоль которого излучается плоский света. “Плоский свет” означает тонкие световые лучи, распространяющиеся в разных направлениях в одной и той же плоскости, будучи излученными источником света, как будет описано ниже.As shown in FIG. 1, a robot cleaner according to an exemplary embodiment, indicated by “1”, is a device for automatically cleaning an area that it will clean by sucking weeds, such as dust, from the floor of the area to be cleaned, automatically moving around the area to be cleaned without user control. The cleaning
Робот-уборщик 1 оснащен модулем обнаружения препятствий (не показан) и, как таковой, может “ощупывать” зону вокруг себя во всех направлениях или в широкой веерообразной зоне. Основываясь на считанных результатах модуля обнаружения препятствий, робот-уборщик 1 может определить расстояние до препятствия, присутствующего в зоне, положение препятствия, высоту препятствия, форму препятствия и точку падения. Основываясь на результатах этого определения, робот-уборщик 1 может определить окружающую обстановку в подлежащей очищению зоне и может затем выполнить операцию очищения для этой зоны.The cleaning
На фиг. 2A представлена блок-схема, иллюстрирующая конфигурацию системы управления робота-уборщика, который включает в себя модуль обнаружения препятствий, согласно типовому варианту осуществления. На фиг. 2B показан вид в перспективе робота-уборщика, включающего в себя модуль обнаружения препятствий, согласно типовому варианту осуществления. На фиг. 2C показан вид сзади робота-уборщика, включающего в себя модуль обнаружения препятствий, согласно типовому варианту осуществления. На фиг. 2D показан вид в перспективе, иллюстрирующий модуль обнаружения препятствий согласно типовому варианту осуществления.In FIG. 2A is a block diagram illustrating a configuration of a robot cleaner control system that includes an obstacle detection module according to an exemplary embodiment. In FIG. 2B is a perspective view of a robot cleaner including an obstacle detection module according to an exemplary embodiment. In FIG. 2C is a rear view of a robot cleaner including an obstacle detection module according to an exemplary embodiment. In FIG. 2D is a perspective view illustrating an obstacle detection module according to an exemplary embodiment.
Как показано на фиг. 2A-2D, робот-уборщик 1 включает в себя корпус 20, определяющий внешний вид робота-уборщика 1. Робот-уборщик 1 также включает в себя чистящее устройство для очищения пространства, подлежащего очищению (которое именуется далее “очищаемым пространством”), устройство 40 передвижения для передвижения робота-уборщика 1, устройство 12 ввода/вывода для приема рабочих команд для робота-уборщика 1 и для отображения на дисплее информации, относящейся к работе робота-уборщика 1,, устройство 13 обнаружения положения для обнаружения положения робота-уборщика 1 в очищаемом пространстве, устройство 14 обнаружения препятствий для обнаружения препятствия, расположенного в очищаемом пространстве, устройство 15 обнаружения подъема для обнаружения подъема робота-уборщика 1 относительно пола очищаемого пространства, устройство 16 обнаружения рабочего состояния для обнаружения передвижения робота-уборщика 1, приводное устройство 17 для приведения в действие устройства 40 передвижения и чистящего устройства 30, запоминающее устройство 18 для запоминания различных данных, устройство 18 питания для подачи электропитания на робот-уборщик 1 и устройство 11 управления для управления составляющими элементами робота-уборщика 1. As shown in FIG. 2A-2D, the
Чистящее устройство 30 включает в себя главное щеточное устройство 31 для сметания пыли, присутствующей на полу, с тем чтобы направить сметаемую пыль в засасывающее отверстие, и боковые щеточные устройства 32a и 32b для очищения зоны, прилегающей к стене и углам.The
Главное щеточное устройство 31 может быть установлено в отверстии 33, образованном на дне корпуса 20, для сметания пыли, накопленной на полу, на котором располагается корпус 20. Отверстие 33 может быть образовано на участке дна корпуса 20, смещенном от центральной зоны корпуса 20 в заднем направлении R. Отверстие 33 может использоваться в качестве заборника пыли, в который вводится пыль. Главное щеточное устройство 31 может включать в себя вал 31a и главную щетку 31b, наклеенную на наружную поверхность вала 31a.The
Вал 31a обеспечивает вращение главной щетки 31b. Когда вал 31a вращается, главная щетка 31b сметает пыль, накопленную на полу, так что сметенная пыль направляется в заборник 33 пыли. В этом случае вал 31a может быть выполнен в виде жесткого стального тела, а главная щетка 31b может изготавливаться из различных материалов, обладающих эластичностью. Конечно, варианты осуществления не ограничиваются такими материалами.The
Хотя это не показано, чистящее устройство 30 может включать в себя вентиляционное устройство (не показано), расположенное в отверстии 33, для генерации засасывающей силы. Функция вентиляционного устройства заключается в перемещении пыли, поступившей в заборник пыли, в пылесборник (не показан).Although not shown, the
Устройство 40 передвижения включает в себя ходовые колеса 41 и 42 для передвижения корпуса 20 в соответствии с сигналом управления движением и ролик 43, позволяющий корпусу 2о сохранять устойчивое положение при повороте в соответствии с направлением движения робота-уборщика 1.The
Например, два ходовых колеса 41 и 42 могут быть центрально расположены в симметричном порядке на противоположных сторонах дна корпуса 20, соответственно. Ходовые колеса 41 и 42 могут выполнять операции передвижения, включающие в себя передвижение вперед, передвижение назад и поворот, под управлением приводной схемы во время выполнения роботом-уборщиком 1 очищающей операции.For example, two running
Ролик 43 может быть установлен на переднем краевом участке дна корпуса 20, если смотреть на это, основываясь на направлении передвижения.The
Ходовые колеса 41 и 42, и ролик 43 могут быть выполнены в виде единого съемного узла, устанавливаемого на корпусе 20.The driving
Устройство 12 ввода/вывода обеспечено на верхней поверхности корпуса 20 робота. Устройство 12 ввода/вывода включает в себя множество рабочих кнопок 81 для ввода пользователем рабочих команд в робот-уборщик и дисплей 82 для воспроизведения информации, относящейся к работе робота-уборщика, например, такой информации, как работает ли робот-уборщик 1, информации о режиме движения, и т.п. Мембранные выключатели могут использоваться в качестве рабочих кнопок 81. В качестве дисплея 82 может использоваться жидкокристаллический (LCD) дисплей или светодиодный (LED) дисплей.An input /
Устройство 13 обнаружения положения может включать в себя верхний модуль 70 камеры для получения верхнего изображения для робота-уборщика 1, а именно, изображения потолка в очищаемом пространстве. Например, когда робот-уборщик 1 передвигается в произвольном направлении при условии отсутствия заданного пути, вдоль которого передвигается робот-уборщик, то есть когда робот-уборщик 1 передвигается, используя модуль обнаружения препятствий, он может передвигаться в пределах очищаемого пространства, используя модуль обнаружения препятствий. В этом случае устройство 13 обнаружения положения может фотографировать верхнее изображение для робота-уборщика 1, используя верхний модуль 70 камеры для генерации информации, относящейся к положению робота-уборщика 1. Устройство 14 обнаружения препятствий включает в себя модуль 100 обнаружения препятствий для излучения плоского света в переднем или боковом направлении относительно робота-уборщика 1 и последующего обнаружения отраженного света, отражаемого от препятствия, для обнаружения препятствия.The
Как показано на фиг. 2D, модуль 100 обнаружения препятствий установлен на передней стороне робота-уборщика 1. Конечно, когда в роботе-уборщике 1 установлено множество модулей 100 обнаружения препятствий, их позиции установки могут включать в себя позицию, отличающуюся от передней стороны робота 1.As shown in FIG. 2D, an
Модуль 100 обнаружения препятствий будет подробно описан ниже.An
Устройство 15 обнаружения подъема может включать в себя модуль датчика отделения (не показан) для обнаружения отделения ходовых колес 41 и 42. Говоря подробно, когда робот-уборщик 1 отделяется от пола очищаемого пространства, ходовые колеса 41 и 42 могут быть отделены от их первоначального положения. В этом случае модуль обнаружения отделения обнаруживает отделение ходовых колес 41 и 42. Как будет описано ниже, когда подъем робота-уборщика 1 обнаруживается устройством 15 обнаружения подъема, робот-уборщик 1 выключает источник света (не показан), включенный в состав модуля обнаружения препятствий (не показан).The
Устройство 16 обнаружения рабочего состояния может включать в себя акселерометр (не показан), гиродатчик, или тому подобное, для обнаружения поступательного перемещения и поворота чистящего устройства 30. Устройство 16 обнаружения рабочего состояния генерирует информацию, относящуюся к передвижению робота-уборщика 1. Возбуждающее устройство источника света, которое включено в состав модуля обнаружения препятствий, работает, основываясь на этой информации передвижения. Например, когда возбуждающее устройство источника света, которое будет описано ниже, принимает сигнал передвижения от устройства 16 обнаружения рабочего состояния, оно может включить источник света. С другой стороны, когда возбуждающее устройство источника света принимает сигнал останова, оно может выключить источник света.The operating
Запоминающее устройство 18 может включать в себя энергонезависимое запоминающее устройство (не показано), такое как магнитный диск или жесткий диск, для постоянного запоминания программ и данных управления с целью управления работой робота-уборщика 1, и энергозависимое запоминающее устройство (не показано), такое как D-RAM или S-RAM, для временного запоминания данных, генерируемых в процессе управления работой робота-уборщика 1.The
Устройство 19 питания включает в себя батарею 50 для подачи электропитания на составляющие элементы робота-уборщика 1.The
Батарея 50 может быть перезаряжаемой аккумуляторной батареей. Когда корпус 20 подсоединяется к зарядному устройству или загрузочной станции (не показана) после завершения очищающей операции, на батарею 50 может подаваться электропитание от загрузочной станции для ее зарядки.
Функция устройства 11 управления заключается в том, чтобы управлять приведением в действие робота-уборщика 1, основываясь на результатах, полученных модулем 100 обнаружения препятствий в роботе-уборщике 1. Например, устройство 11 управления может устанавливать путь передвижения, основываясь на информации, касающейся окружающей среды робота-уборщика 1, а именно, информации по обнаружению препятствий, и может генерировать сигнал управления приводом для управления операциями, относящимся к передвижению и очищающим операциям робота-уборщика 1.The function of the
В этом случае информация по обнаружению препятствий может включать в себя расстояние от корпуса 20 до обнаруженного препятствия, положение препятствия, высоту препятствия, форму препятствия, точку падения, и т.п. Информация по обнаружению препятствий может быть принятой от модуля 100 обнаружения препятствий или непосредственно генерируемой от устройства 11 управления.In this case, the obstacle detection information may include the distance from the
Выше была описана конфигурация робота-уборщика 1. Далее будет описан модуль обнаружения препятствий, включенный в состав робота-уборщика 1.The configuration of the
На фиг. 3A представлена блок-схема конфигурации системы управления для модуля обнаружения препятствий согласно типовому варианту осуществления.In FIG. 3A is a block diagram of a configuration of a control system for an obstacle detection module according to an exemplary embodiment.
Как показано на фиг. 3A, модуль 100 обнаружения препятствий может включать в себя по меньшей мере один излучатель 110 света для рассеяния света, исходящего от источника 112 света, с тем чтобы излучать плоский свет, приемник 120 света для приема отраженного света, отражаемого от препятствия, с тем чтобы генерировать электрический сигнал изображения, и контроллер 130 обнаружения препятствий.As shown in FIG. 3A, the
Источник 112 света включен в состав излучателя 110 света. Излучатель 110 света может дополнительно включать в себя возбуждающее устройство 113 источника света, чтобы приводить в действие источник 112 света.A
Функцией источника 112 света является излучение света. Источник 112 света может быть лазерным диодом (LD), светоизлучающим диодом (LED) или подобным источником. Свет, испускаемый источником 112 света, может включать в себя невидимый инфракрасный свет, видимый свет, и т.п. Источник 112 света может генерировать свет, имеющий форму лучей, распространяющихся в одном направлении.The function of the
Возбуждающее устройство 113 источника света может побуждать источник 112 света испускать свет в соответствии с сигналом управления светом от контроллера 130 обнаружения препятствий, и может принимать по принципу обратной связи интенсивность излученного света, используя фотодиод (не показан) или подобный элемент.The
Приемник 120 света может включать в себя оптический механизм 121 для изменения пути отраженного света, отражаемого от препятствия, оптический датчик 123 для приема прошедшего по измененному пути отраженного света и, таким образом, для генерации электрического сигнала изображения, и схему 124 обработки сигналов для приема электрического сигнала и последующего преобразования принятого сигнала в цифровой сигнал. Конечно, когда оптический датчик 123 имеет функцию преобразования электрического сигнала изображения в цифровой сигнал, приемник 120 света может обходиться без схемы 124 обработки сигналов.The
Оптический механизм 121 изменяет путь прохождения отраженного света, отражаемого от препятствия, так, что отраженный свет направляется в оптический датчик 123, который будет описан ниже. В качестве оптического механизма 121 могут быть использованы либо зеркало, либо линза, либо призма полного отражения, и т.п., которые могут изменять путь прохождения света.The
Например, когда используется зеркало в качестве оптического механизма 121, оптический механизм 121 еще раз отражает отраженный свет, который отражен от препятствия, таким образом, что отраженный свет направляется в оптический датчик. С другой стороны, когда используется линза в качестве оптического механизма 121, оптический механизм 121 преломляет отраженный свет, который отражен от препятствия, таким образом, что отраженный свет направляется в оптический датчик. Помимо того, когда призма полного отражения используется в качестве оптического механизма 121, оптический механизм 121 отражает или преломляет отраженный свет, который отражен от препятствия, таким образом, что отраженный свет направляется в оптический датчик.For example, when a mirror is used as the
Фильтр может быть нанесен на поверхность оптического механизма 121 или оптического датчика 123 в приемнике 120 света, чтобы позволить свету, имеющему длину волны плоского света, проходить через оптический механизм 121. В этом случае свет, отличающийся от отраженного света, генерируемого в соответствии с отражением от препятствия плоского света, исходящего от излучателя 110 света, может быть исключен.The filter may be applied to the surface of the
Оптический датчик 123 принимает отраженный свет, который отражен от препятствия, и, таким образом, генерирует аналоговый или цифровой сигнал. Например, в качестве оптического датчика 123 может быть использован датчик изображений. Датчик изображений может включать в себя фотодиодный датчик для обнаружения интенсивности отраженного света, датчик изображений с комплементарной структурой “металл-оксид-полупроводник” (MOS) для получения изображения, основываясь на отраженном свете, или датчик изображений на приборах с обратной связью (CCD).The
Отраженный свет, отражаемый от препятствия, будучи излученным излучателем 110 света, падает на оптический датчик 123 через оптический механизм 121. Падающий свет преобразуется в электрический сигнал изображения в оптическом датчике 123. Когда датчик изображений используется как оптический датчик 123, приемник 120 света может дополнительно включать в себя оптическую линзу (не показана), расположенную между оптическим механизмом 121 и оптическим датчиком 123, будучи при этом отнесенной от оптического механизма 121 на заданное расстояние, чтобы позволить отраженному свету проходить через нее. Говоря более подробно, оптическая линза (не показана) концентрирует отраженный свет, проходящий по измененному оптическим механизмом 121 пути, так, чтобы сфокусировать изображение на оптический датчик 123. Оптическая линза (не показана) может быть выпуклой линзой.The reflected light reflected from the obstacle, being emitted by the
Схема 124 обработки изображений может преобразовывать аналоговый сигнал, принятый от оптического датчика 123, в цифровой сигнал и может преобразовывать формат сигнала. Схема 124 обработки изображений может включать в себя аналого-цифровой (A/D) преобразователь (не показан) для преобразования аналогового сигнала в цифровой сигнал.The
Например, когда описанный выше датчик изображений используется в качестве оптического датчика 123, схема 124 обработки изображений может преобразовывать формат изображения, принятого датчиком изображений, так, чтобы преобразованный формат соответствовал желаемому бытовому прибору. Схема 124 обработки изображений может преобразовывать формат изображения в особый формат, такой как JPEG или MPEG в соответствии с характеристиками и требованиями бытового прибора (например, робота-уборщика).For example, when the image sensor described above is used as the
Контроллер 130 обнаружения препятствий может генерировать оптические сигналы управления для управления включением/выключением источника 112 света, и может генерировать информацию по обнаружению препятствий, основываясь на сигнале изображения, поданном на контроллер 130 обнаружения препятствий. Например, информация по обнаружению препятствий может включать в себя расстояние от корпуса до обнаруженного препятствия, положение препятствия, высоту препятствия, форму препятствия, точку падения, и т.п.The
Контроллер 130 обнаружения препятствий может выполнять модуляцию частоты, продолжительности включения и интенсивности, основываясь на интенсивности света, принятой от фотодетектора (не показан), и может передавать сигнал управления, соответствующий модуляции, в возбуждающее устройство 113 источника света для испускания света, имеющего частоту, продолжительность включения и интенсивность, желаемые пользователем. Например, контроллер 130 обнаружения препятствий может управлять интенсивностью света через средство управления, такое как широтно-импульсная модуляция (PWM).The
Контроллер 130 обнаружения препятствий не обязательно должен быть единым модулем, в котором контроллер 130 обнаружения препятствий физически соединяется с излучателем 110 света и приемником 120 света. Другие устройства, в которые модуль 100 обнаружения препятствий может вставляться, такие как центральный процессор (CPU) или устройство управления многопунктовой связью (MCU), могут использоваться в качестве контроллера 130 обнаружения препятствий.The
Источник 112 света в модуле 100 обнаружения препятствий может генерировать плоский свет. Альтернативно излучатель 110 света может включать в себя множество источников 112 света для генерации плоского света.The
Ниже будет описан способ генерации плоского света в модуле 100 обнаружения препятствий.Next, a method for generating plane light in an
На фиг. 3B представлен вид, иллюстрирующий пример, в котором модуль обнаружения препятствий генерирует плоский свет в соответствии с типовым вариантом осуществления. На фиг. 3C представлен вид, иллюстрирующий пример, в котором модуль обнаружения препятствий генерирует плоский свет в соответствии с типовым вариантом осуществления.In FIG. 3B is a view illustrating an example in which an obstacle detection module generates plane light in accordance with an exemplary embodiment. In FIG. 3C is a view illustrating an example in which an obstacle detection module generates flat light in accordance with an exemplary embodiment.
Как показано на фиг. 3B применительно к случаю, в котором излучатель 110 света включает в себя один источник 112 света для генерации плоского света, модуль 100 обнаружения препятствий может генерировать веерообразную форму плоского света за счет отражения света, излучаемого источником 112 света, зеркалом или преломления света через линзу. Например, излучатель 110 света может генерировать веерообразный плоский свет, используя коническое зеркало для отражения падающего света, с тем чтобы широко рассеять свет, или широкоугольную линзу, чтобы широко рассеять свет.As shown in FIG. 3B with respect to the case in which the
С другой стороны, на фиг. 3C применительно к случаю, в котором излучатель 110 света включает в себя множество источников 112 света для генерации плоского света, источники 112 света плотно распределены по передней стороне робота-уборщика 1, так что множество лучей, исходящих от источников 112 света, перекрываются друг с другом с целью образования плоского света.On the other hand, in FIG. 3C in the case in which the
Ниже будет описана генерация модулем 100 обнаружения препятствий плоского света веерообразной или полукруглой формы посредством преломления света, излучаемого источником 112 света, используя широкоугольную линзу, как показано на фиг. 3B. Below, a fan-shaped or semicircular-shaped generation of flat light by the refraction of the light emitted by the
На фиг. 4A представлено изображение, иллюстрирующее внешний вид модуля обнаружения препятствий согласно типовому варианту осуществления.In FIG. 4A is a view illustrating an appearance of an obstacle detection module according to an exemplary embodiment.
Когда один излучатель 110 света и один приемник 120 света выполнены как единое целое, они могут быть расположены на основании 100b. В этом случае излучатель 110 света может находиться перед приемником 120 света. Излучатель 110 света может располагаться внутри корпуса 100a излучателя света. Приемник 120 света может быть подсоединен к стойке 100c, чтобы приемник 120 света поддерживался сцепляющим элементом 100e.When one
Конечно, конфигурация, показанная на фиг. 4A, является примером осуществления модуля 100 обнаружения препятствий, и не ограничивается той, что показана на фиг. 4A. То есть излучатель 110 света может располагаться под основанием 100b, а приемник 120 света может располагаться над основанием 100b. Альтернативно излучатель 110 света и приемник 120 света могут располагаться в одной и той же позиции.Of course, the configuration shown in FIG. 4A is an example embodiment of an
Конечно, когда модуль 100 обнаружения препятствий устанавливается в роботе 1, важно насколько возможно уменьшить размер модуля 100 обнаружения препятствий. Может оказаться возможным уменьшить высоту модуля 100 обнаружения препятствий, располагая излучатель 110 света впереди приемника 120 света. В этом случае приемник 120 света может располагаться на уровне, который выше уровня излучателя 110 света. В соответствии с этим, даже когда излучатель 110 света располагается впереди приемника 120 света, отраженный свет, отражаемый от препятствия, может полностью передаваться в приемник 120 света, не преграждаясь излучателем 110 света.Of course, when the
Хотя в иллюстрируемом случае модуль обнаружения препятствий включает в себя интегральную структуру из одного излучателя света и одного приемника света, излучатель света и приемник света могут быть отделены друг от друга. Альтернативно модуль обнаружения препятствий может включать в себя множество излучателей света или множество приемников света. Другими словами, излучатель света и приемник света могут располагаться в разных позициях, так что они могут быть независимы друг от друга.Although in the illustrated case, the obstacle detection module includes an integral structure of one light emitter and one light detector, the light emitter and the light detector can be separated from each other. Alternatively, the obstacle detection module may include multiple light emitters or multiple light detectors. In other words, the light emitter and the light receiver can be located in different positions, so that they can be independent of each other.
На фиг. 4B представлен вид, иллюстрирующий диапазон обзора робота-уборщика, когда два излучателя света, включенные в состав модуля обнаружения препятствий, установлены в разных позициях согласно типовому варианту реализации.In FIG. 4B is a view illustrating a viewing range of a robot cleaner when two light emitters included in an obstacle detection module are installed in different positions according to a typical embodiment.
Как показано на фиг. 4B, модуль 100 обнаружения препятствий может включать в себя два излучателя 110a и 110b света, расположенных в разных позициях, и один приемник 120 света. Два излучателя 110a и 110b света могут иметь разные установочные позиции на роботе-уборщике или разные уровни относительно пола.As shown in FIG. 4B, the
В этом случае может быть возможным обнаружение препятствий, находящихся на разных уровнях, путем расположения множества излучателей 110a и 110b света на разных уровнях или расположения множества излучателей 110a и 110b света наклонно. Когда излучатели 110a и 110b света и приемник 120 света располагаются в разных позициях без выравнивания по вертикали, может оказаться возможным обнаруживать препятствия, расположенные на различных уровнях, не увеличивая высоту модуля 100 обнаружения препятствий.In this case, it may be possible to detect obstacles at different levels by arranging the plurality of
На фиг. 4C представлен вид, иллюстрирующий диапазон обзора робота-уборщика, когда модуль обнаружения препятствий включает в себя три излучателя света согласно типовому варианту осуществления.In FIG. 4C is a view illustrating a viewing range of a robot cleaner when an obstacle detection module includes three light emitters according to an exemplary embodiment.
Как показано на фиг. 4C, модуль 100 обнаружения препятствий может включать в себя три излучателя 110a, 110b и 110c света, расположенных в разных позициях на роботе-уборщике 1. Когда используются три излучателя 110a, 110b и 110c света, способные рассеивать плоский свет в секторе 120°, может стать возможным получение такого же эффекта, как в случае, в котором используется один излучатель света, способный рассеивать свет в секторе 220°.As shown in FIG. 4C, the
В этом случае первый излучатель 110a света может устанавливаться впереди приемника света, установленного на передней стороне робота 1, будучи приспособленным для рассеяния плоского света в переднем направлении. Второй излучатель 110b света устанавливается смещенным от первого излучателя 110a света влево на заданное расстояние, будучи приспособленным для рассеяния плоского света в направлении, образующим заданный угол относительно передней стороны робота 1. С другой стороны, третий излучатель 110c света устанавливается смещенным от первого излучателя 110a света вправо на заданное расстояние, будучи приспособленным для рассеяния плоского света в направлении, образующим заданный угол относительно передней стороны робота 1.In this case, the
В этом случае зоны рассеяния плоского света от первого излучателя 110a света, второго излучателя 110b света и третьего излучателя 110c света могут частично перекрываться друг с другом. Дополнительно первый излучателя 110a света, второй излучатель 110b света и третий излучатель 110c света могут располагаться таким образом, чтобы свести к минимуму мертвую зону, которая может не восприниматься роботом 1, учитывая позиционные характеристики первого излучателя 110a света, второго излучателя 110b света и третьего излучателя 110c света.In this case, the areas of scattering of plane light from the
На фиг. 4D представлен вид, иллюстрирующий диапазон обзора робота-уборщика, когда модуль обнаружения препятствий включает в себя четыре излучателя света согласно типовому варианту осуществления.In FIG. 4D is a view illustrating a viewing range of a robot cleaner when an obstacle detection module includes four light emitters according to an exemplary embodiment.
На фиг. 4D показаны четыре излучателя 110a, 110b, 110c и 110d света, расположенные в разных позициях на роботе 1. Когда используются четыре излучателя 110a, 110b, 110c и 110d света, способные рассеивать свет в секторе 120°, может стать возможным рассеяние плоского света по более широкой зоне, чем в случае, когда используется один излучатель света, способный рассеивать свет в секторе 220°.In FIG. 4D shows four
В этом случае пара излучателей света, а именно, первый излучатель 110a света и второй излучатель 110b света устанавливаются смещенными на заданное расстояние влево от приемника 120 света, установленного на передней стороне робота 1, будучи ориентированными в разных направлениях, образующих заданный угол между ними. Другая пара излучателей света, а именно, третий излучатель 110с света и четвертый излучатель 110d света устанавливаются смещенными на заданное расстояние вправо от приемника 120 света, установленного на передней стороне робота 1, будучи ориентированными в разных направлениях, образующих заданный угол между ними.In this case, a pair of light emitters, namely, the
В этом случае первый излучатель 110a света и второй излучатель 110b света могут рассеивать плоский свет вперед и влево от робота 1, соответственно. С другой стороны, третий излучатель 110с света и четвертый излучатель 110d света могут рассеивать плоский свет вперед и вправо от робота 1, соответственно. В этом случае зоны рассеяния плоского света от первого излучателя 110a света, второго излучателя 110b света, третьего излучателя 110c света и четвертого излучателя 110d света могут частично перекрываться друг с другом. Дополнительно первый излучатель 110a света, второй излучатель 110b света, третий излучатель 110с света и четвертый излучатель 110d света могут располагаться таким образом, чтобы свести к минимуму мертвую зону, которая может не восприниматься роботом 1, учитывая позиционные характеристики первого излучателя 110a света, второго излучателя 110b света, третьего излучателя 110c света и четвертого излучателя 110d света. Модуль 100 обнаружения препятствий может обнаруживать препятствия, существующие вокруг робота 1, генерируя равномерно распределенный плоский свет.In this case, the
Робот 1, оснащенный модулем 100 обнаружения препятствий, может обеспечивать более эффективное очищение и передвигаться в соответствии с обнаруженными препятствиями, существующими вокруг него, и использованием полученных результатов в системе управления движением.A
Далее будет подробно описан приемник света.Next, a light detector will be described in detail.
Для лучшего понимания приемника света последующее описание будет дано применительно к случаю, в котором в качестве оптического механизма (“121” на фиг. 3A) используется отражающее зеркало для отражения по направлению к оптическому датчику (“123” на фиг. 3A) отраженного света, отражаемого препятствием.For a better understanding of the light receiver, the following description will be given with reference to the case in which a reflective mirror is used as the optical mechanism (“121” in FIG. 3A) to reflect reflected light towards the optical sensor (“123” in FIG. 3A), reflected by an obstacle.
Дополнительно приемник света будет описан применительно к случаю, в котором приемник света использует датчик изображений, и к случаю, в котором приемник света использует фотодиод. Сначала будет описан приемник света, который использует датчик изображений.Additionally, the light detector will be described with reference to the case in which the light detector uses an image sensor and to the case in which the light detector uses a photodiode. First, a light detector that uses an image sensor will be described.
На фиг. 5A показан вид, представляющий приемник света, включенный в состав модуля обнаружения препятствий согласно типовому варианту осуществления, и изображение, принимаемое приемником света. Как показано на фиг. 5A(a), приемник света, который обозначен ссылочной позицией “122a”, включает в себя отражающее зеркало 121a для изменения пути прохождения отраженного света, отражаемого от препятствия, с тем чтобы отраженный свет направлялся в датчик 123a изображений, и оптическую линзу 122b для собирания в пучок отраженного света, путь прохождения которого изменен отражающим зеркалом 121a. Приемник света дополнительно включает в себя датчик 123a изображений для приема отраженного света, собранного в пучок оптической линзой 122b.In FIG. 5A is a view showing a light receiver included in an obstacle detection module according to an exemplary embodiment, and an image received by the light receiver. As shown in FIG. 5A (a), the light receiver, which is indicated by the reference number “122a”, includes a
В качестве отражающего зеркала 121a может быть использовано коническое зеркало, чтобы изменить путь прохождения отраженного света, падающего на зеркало, в различных направлениях в сторону датчика 123a изображений. Отражающее зеркало 121a может быть расположено над датчиком 123a изображений, продолжаясь вертикально вниз, так что вершина конического отражающего зеркала будет обращена вниз в сторону датчика 123a изображений. Конечно, форма отражающего зеркала 121a не ограничивается конической формой.As a reflecting
Отражающее зеркало 121a может быть изготовлено из металла, такого как алюминий, или может быть выполнено в виде пластмассового корпуса с нанесением хромового (Cr) покрытия на пластмассовый корпус, чтобы добиться повышения отражательной способности поверхности отражающего зеркала 121a, которое при этом может отражать свет, отражаемый от препятствия, в направлении датчика 123a изображений без искажения.The reflecting
При использовании конического зеркала в качестве отражающего зеркала 121a датчик 123a изображений может принимать изображение, показанное на фиг. 5A(b). Говоря более подробно, в центральном участке изображения, принятого датчиком 123a изображений, нет изображения, связанного с препятствием, вследствие блокировки отраженного света корпусом робота-уборщика. Принятое изображение включает в себя изображение, связанное с препятствием, будучи при этом расположенным в диапазоне позиций, отнесенном в радиальном направлении от центра принятого изображения. Изображение препятствия, расположенного в позиции близко к корпусу робота-уборщика, будучи при этом удаленным от пола очищаемого пространства на небольшую высоту, располагается в позиции близко к центру принятого изображения. С другой стороны, изображение препятствия, расположенного в позиции, удаленной от корпуса робота-уборщика, будучи при этом удаленным от пола очищаемого пространства на большую высоту, располагается в позиции близко к периферии принятого изображения. Другими словами, изображение препятствия, находящегося ближе к роботу-уборщику, располагается в позиции ближе к центру изображения, принятого датчиком 123a изображений, в то время как изображение препятствия, находящегося дальше от робота-уборщика, располагается в позиции, удаленной от центра изображения, принятого датчиком 123a изображений.When using a conical mirror as the reflecting
Ниже будут представлены различные конические формы отражающего зеркала 121a, и будут описаны углы обзора робота-уборщика, связанные с соответствующими коническими формами отражающего зеркала 121a, и изображения препятствий, принятые датчиком 123a изображений в связи с соответствующими коническими формами отражающего зеркала 121a.Various conical shapes of the reflecting
На фиг. 5B показан вид, иллюстрирующий первый пример отражающего зеркала, включенного в состав приводимого в качестве примера приемника света в модуле обнаружения препятствий согласно типовому варианту реализации, и изображение, принимаемое отражающим зеркалом.In FIG. 5B is a view illustrating a first example of a reflective mirror included in an exemplary light receiver in an obstacle detection module according to an exemplary embodiment, and an image received by a reflective mirror.
Как видно на фиг. 5B, отражающее зеркало, которое обозначено ссылочной позицией “121a-1”, имеет типовую коническую форму, показанную на фиг. 5B(a).As seen in FIG. 5B, the reflecting mirror, which is indicated by the reference numeral “121a-1”, has the typical conical shape shown in FIG. 5B (a).
Сечение отражающего зеркала 121a-1 по линии A-A′ на фиг. 5B(a) имеет треугольную форму, как показано на фиг. 5B(b).A section of the reflecting
Робот-уборщик 1, в котором используется отражающее зеркало 121a-1, имеющее описанную выше коническую форму, имеет веерообразный диапазон обзора, как показано на фиг. 5B(c). Говоря подробно, робот-уборщик 1 может иметь угол обзора от 100° до 150° в направлениях влево и вправо по отношению к передней стороне робота-уборщика, где расположен приемник 120a света, включающий себя отражающее зеркало 121a-1. Другими словами, робот-уборщик 1 может в целом иметь угол обзора от 200° до 300°. Поскольку корпус робота-уборщика 1 блокирует поле обзора приемника 120a света, может оказаться невозможным обеспечивать угол обзора 360°. Угол обзора робота-уборщика 1 может изменяться в соответствии с позицией приемника 120a света. Например, когда устанавливается приемник 120a света, выступающий из корпуса робота-уборщика 1, может быть обеспечен широкий угол обзора. С другой стороны, когда приемник 120a располагается внутри корпуса робота-уборщика 1, угол обзора может быть более узким.The
Кроме того, робот-уборщик 1 может обеспечивать заданное расстояние d обзора. Расстояние d обзора робота-уборщика 1 может изменяться в соответствии с разрешающей способностью датчика 123a изображений, материалом отражающего зеркала 121a-1 и формой отражающего зеркала 121a-1, а именно, углом боковой поверхности конической формы. Датчик 123a изображений, включенный в состав робота-уборщика 1, использующего отражающее зеркало 121a-1, может принимать веерообразное изображение, как показано на фиг. 5B(d). Говоря подробно, как показано на фиг. 5B(d), может стать возможным получение изображения, которое имеет форму, подобную форме диапазона обзора робота-уборщика 1. Может быть также возможным получение четкого изображения препятствия, сформированного в позиции, соответствующей позиции препятствия. Например, когда препятствие располагается в позиции, немного смещенной в направлении влево впереди робота-уборщика 1, как показано на фиг. 5B(с), датчик 123a изображений может принимать изображение OI препятствия, имеющее четкую дугообразную форму в позиции, немного смещенной в направлении влево впереди робота-уборщика 1. Как будет описано ниже, основываясь на позиции принятого изображения OI препятствия, робот-уборщик 1 может определить присутствие препятствия O и положение препятствия O.In addition, the
На фиг. 5С показан вид, иллюстрирующий второй пример отражающего зеркала, включенного в состав приводимого в качестве примера приемника света в модуле обнаружения препятствий согласно типовому варианту реализации, и изображение, принятое отражающим зеркалом.In FIG. 5C is a view illustrating a second example of a reflective mirror included in an exemplary light receiver in an obstacle detection module according to an exemplary embodiment, and an image received by a reflective mirror.
Как видно на фиг. 5C, отражающее зеркало, которое обозначено ссылочной позицией “121a-2”, имеет форму, образованную вертикальным усечением конической формы с нижней части конической формы (называемую далее “вертикально-усеченной конической формой”), как показано на фиг. 5C(a).As seen in FIG. 5C, the reflecting mirror, which is indicated by the reference numeral “121a-2”, has a shape formed by vertical truncation of the conical shape from the bottom of the conical shape (hereinafter referred to as “vertically truncated conical shape”), as shown in FIG. 5C (a).
Сечение отражающего зеркала 121a-2 по линии B-B′ на фиг. 5C(a) имеет срезанную под прямым углом треугольную форму, как показано на фиг. 5C(b). Робот-уборщик 1, в котором используется отражающее зеркало 121a-2, имеющее вертикально-усеченную коническую форму, имеет полукруглую форму диапазона обзора, как показано на фиг. 5C(c).A section of the reflecting
Говоря более подробно, робот-уборщик 1 может иметь угол обзора 90° в направлениях влево и вправо по отношению к передней стороне робота-уборщика 1, где расположен приемник 120a света. Другими словами, робот-уборщик 1 может в целом иметь угол обзора 180°. Это объясняется тем, что отраженный свет падает только на боковую сторону конической формы, и никакой отраженный свет не падает на заднюю поверхность отражающего зеркала 121a-2.In more detail, the
Кроме того, робот-уборщик может обеспечивать заданное расстояние d обзора. Как было описано выше, расстояние d обзора робота-уборщика 1 может изменяться в зависимости от разрешающей способности датчика 123a изображений, материала отражающего зеркала 121a-2 и формы отражающего зеркала 121a-2, а именно, от угла боковой поверхности конической формы.In addition, the robot cleaner may provide a predetermined viewing distance d. As described above, the viewing distance d of the
Датчик 123a изображений, включенный в состав робота-уборщика 1, использующего отражающее зеркало 121a-2, может принимать полукруглое изображение, как показано на фиг. 5C(d).The
Говоря более подробно, как показано на фиг. 5C(d), может оказаться возможным принимать изображение, имеющее форму, подобную форме диапазона обзора робота-уборщика 1. Может быть также возможным получение четкого изображения препятствия, образованного в позиции, соответствующей позиции препятствия. Например, когда препятствие находится в позиции, немного смещенной в направлении влево перед роботом-уборщиком 1, как показано на фиг. 5C(c), датчик 123a изображений может принимать изображение OI препятствия, имеющее четкую дугообразную форму, в позиции, немного смещенной в направлении влево перед роботом-уборщиком 1.In more detail, as shown in FIG. 5C (d), it may be possible to receive an image having a shape similar to that of the viewing range of the
На фиг. 5D представлен вид, иллюстрирующий третий пример отражающего зеркала, включенного в состав приводимого в качестве примера приемника света в модуле обнаружения препятствий согласно типовому варианту реализации, и изображение, принимаемое отражающим зеркалом.In FIG. 5D is a view illustrating a third example of a reflective mirror included in an exemplary light receiver in an obstacle detection module according to an exemplary embodiment, and an image received by a reflective mirror.
Как можно увидеть на фиг. 5D, отражающее зеркало, которое обозначено ссылочной позицией “121a-3”, имеет форму, образованную горизонтальным усечением конической формы с нижней части конической формы (называемую далее “горизонтально-усеченной конической формой”), как показано на фиг. 5D(a).As can be seen in FIG. 5D, the reflecting mirror, which is indicated by the reference number “121a-3”, has a shape formed by horizontal truncation of the conical shape from the bottom of the conical shape (hereinafter referred to as “horizontally truncated conical shape”), as shown in FIG. 5D (a).
Сечение отражающего зеркала 121a-3 по линии C-C′ на фиг. 5D(a) имеет горизонтально-усеченную форму, как показано на фиг. 5D(b). Робот-уборщик 1, в котором используется отражающее зеркало 121a-3, имеющее горизонтально-усеченную коническую форму, имеет диапазон обзора в форме срезанного кольца, как показано на фиг. 5D(c). То есть зона, очень близкая к роботу-уборщику 1, не включается в диапазон обзора робота-уборщика 1.A section of the reflecting
Говоря более подробно, робот-уборщик 1 может иметь угол обзора от 100° до 150° в направлениях влево и вправо по отношению к передней стороне робота-уборщика 1, где располагается приемник 120a света. Другими словами, робот-уборщик 1 может в целом иметь угол обзора от 200° до 300°. Поскольку корпус робота-уборщика 1 блокирует поле обзора приемника 121a света, невозможно обеспечить угол обзора 360°.In more detail, the
Кроме того, робот-уборщик 1 может обеспечить заданное расстояние d обзора. То есть робот-уборщик 1 имеет диапазон расстояний обзора между расстоянием d1 обзора, соответствующим длине боковой поверхности конической формы, и расстоянием d2 обзора, соответствующим длине боковой поверхности срезанного участка конической формы. Другими словами, робот-уборщик 1 имеет диапазон обзора от первого расстояния d1 до второго расстояния d2. Это объясняется тем, что отраженный свет падает на боковую поверхность отражающего зеркала 121a-3, тогда как отсутствует отраженный свет, падающий на срезанную нижнюю поверхность отражающего зеркала 121a-3. Расстояние d обзора робота-уборщика 1 может изменяться в зависимости от разрешающей способности датчика 123a изображений, материала отражающего зеркала 121a и формы отражающего зеркала 121a, а именно, угла боковой поверхности конической формы.In addition, the
Датчик 123a изображений, включенный в состав робота-уборщика 1, использующего отражающее зеркало 121a-3, может принимать изображение в форме срезанного кольца, как показано на фиг. 5D(d).The
На фиг. 5E представлен вид, иллюстрирующий четвертый пример отражающего зеркала, включенного в состав приводимого в качестве примера приемника света в модуле обнаружения препятствий согласно типовому варианту реализации, и изображение, принимаемое отражающим зеркалом.In FIG. 5E is a view illustrating a fourth example of a reflective mirror included in an exemplary light receiver in an obstacle detection module according to an exemplary embodiment, and an image received by a reflective mirror.
Как можно увидеть на фиг. 5E, отражающее зеркало, которое обозначено ссылочной позицией “121a-4”,имеет коническую форму, имеющую выпуклую боковую поверхность (именуемую далее “выпуклой конической поверхностью”), как показано на фиг. 5E(a).As can be seen in FIG. 5E, the reflecting mirror, which is indicated by the reference numeral “121a-4”, has a conical shape having a convex side surface (hereinafter referred to as a “convex conical surface”), as shown in FIG. 5E (a).
Сечение отражающего зеркала 121a-4 по линии D-D′ на фиг. 5E(a) имеет выпуклую коническую форму, как показано на фиг. 5E(b).The section of the reflecting
Робот-уборщик 1, в котором используется отражающее зеркало 121a-4, имеющее выпуклую коническую форму, имеет веерообразный диапазон обзора, как показано на фиг. 5E(c). Говоря более подробно, робот-уборщик 1 может иметь угол обзора от 100° до 150° в направлениях влево и вправо по отношению к передней стороне робота-уборщика 1, где располагается приемник 120a света. Другими словами, робот-уборщик 1 может в целом иметь угол обзора от 200° до 300°. Поскольку корпус робота-уборщика 1 блокирует поле обзора приемника 121a света, невозможно обеспечить угол обзора 360°.The cleaning
Кроме того, робот-уборщик 1 может обеспечить заданное расстояние d обзора. Расстояние d обзора отражающего зеркала 121a-4, имеющего описанную выше выпуклую коническую форму, большое по сравнению с отражающим зеркалом (“121a-1” на фиг. 5B), имеющим обычную коническую форму, как в случае выпуклого зеркала, имеющего более широкий диапазон обзора, чем плоское зеркало.In addition, the
Датчик 123a изображений, включенный в состав робота-уборщика 1, использующего отражающее зеркало 121a-4, может принимать веерообразное изображение, как показано на фиг. 5E(d). Поскольку отражающее зеркало 121a-4, имеющее описанную выше выпуклую коническую форму, имеет более широкий диапазон обзора, чем отражающее зеркало (“121a-1” на фиг. 5B), имеющее описанную выше обычную коническую форму, изображение, принимаемое выпуклым коническим отражающим зеркалом 121a-4, может включать в себя информацию о препятствии в более широком очищаемом пространстве, чем изображение, принимаемое обычным коническим отражающим зеркалом (“121a-1” на фиг. 5B).The
На фиг. 5F представлен вид, иллюстрирующий пятый пример отражающего зеркала, включенного в состав приводимого в качестве примера приемника света в модуле обнаружения препятствий согласно типовому варианту реализации, и изображение, принимаемое отражающим зеркалом.In FIG. 5F is a view illustrating a fifth example of a reflective mirror included in an exemplary light receiver in an obstacle detection module according to an exemplary embodiment, and an image received by a reflective mirror.
Как можно увидеть на фиг. 5F, отражающее зеркало, которое обозначено ссылочной позицией “121a-5”, имеет коническую структуру, имеющую выпуклый участок боковой поверхности, продолжающийся от вершины конической структуры до заданной высоты, и вогнутый участок боковой поверхности, продолжающийся от заданной высоты к нижней части конической структуры, как показано на фиг. 5F(a).As can be seen in FIG. 5F, a reflecting mirror, which is indicated by the reference numeral “121a-5”, has a conical structure having a convex portion of the side surface extending from the top of the conical structure to a predetermined height, and a concave portion of the side surface extending from the predetermined height to the bottom of the conical structure, as shown in FIG. 5F (a).
Сечение отражающего зеркала 121a-5 по линии E-E′ на фиг. 5F(a) имеет выпуклую коническую форму, как показано на фиг. 5F(b).A section of the reflecting
Как показано на фиг. 5F(c), робот-уборщик 1, использующий отражающее зеркало 121a-5, может иметь угол обзора от 200° до 300°. Поскольку корпус робота-уборщика 1 блокирует поле обзора приемника 121a света, невозможно обеспечить угол обзора 360°.As shown in FIG. 5F (c), the
Кроме того, робот-уборщик 1 может обеспечить заданное расстояние d обзора. Датчик 123a изображений, включенный в состав робота-уборщика 1, использующего отражающее зеркало 121a-5, может принимать веерообразное изображение, как показано на фиг. 5F(d).In addition, the
На фиг. 6A представлен вид, иллюстрирующий другой пример приемника света в модуле обнаружения препятствий согласно типовому варианту осуществления. На фиг. 6B представлен вид, соответствующий зоне F на фиг. 6A. На фиг. 6C показано сечение по линии G-G′ на фиг. 6A. На фиг. 6D представлен вид, иллюстрирующий диапазон обзора робота-уборщика, включающего в себя используемый в качестве примера приемник света согласно варианту осуществления на фиг. 6A.In FIG. 6A is a view illustrating another example of a light receiver in an obstacle detection module according to an exemplary embodiment. In FIG. 6B is a view corresponding to zone F in FIG. 6A. In FIG. 6C shows a section along line G-G ′ in FIG. 6A. In FIG. 6D is a view illustrating a viewing range of a robot cleaner including an exemplary light detector according to the embodiment of FIG. 6A.
Как показано на фиг. 6A-6D, приемник 120 света включает в себя отражающее зеркало 121b для изменения пути прохождения отраженного света, отражаемого от препятствия, множество экранов 122b для разделения отражающего зеркала 121b на множество отражающих зон 121b-1, 121b-2, 121b-3, 121b-4 и 121b-5, и множество фотодиодов 123b, установленных c обеспечением соответствия отражающим зонам 121b-1, 121b-2, 121b-3, 121b-4 и 121b-5, разделенным экранами 122b.As shown in FIG. 6A-6D, the
В качестве отражающего зеркала 121b может использоваться коническое зеркало, для того чтобы изменить путь прохождения отраженного света, падающего на зеркало, в различных направлениях в сторону датчика 123a изображений. На фиг. 6A-6D показаны конические зеркала в качестве отражающего зеркала 121b. Однако отражающее зеркало 121b не ограничивается показанными случаями. Отражающее зеркало 121b может иметь различные формы, представленные на фиг. 5B-5F.A conical mirror may be used as the reflecting
Экраны 122b разделяют отражающее зеркало 121b на множество отражающих зон. Кроме того, робот-уборщик 1 имеет поле v120b обзора, разделенное на множество зон v120b-1, v120b-2, v120b-3, v120-4 и v120b-5 поля обзора. Каждый экран 122b блокирует отраженный свет, падающий на отражающие зоны, которые не соответствуют надлежащей одной из зон поля обзора. Например, экраны 122b, соответствующие первой зоне v122b-1 поля обзора, позволяют отраженному свету, отражаемому от препятствия O в первом участке v120b-1 поля обзора, падать на первую отражающую зону 121b-1 на фиг. 6A, при этом препятствуя отраженному свету, отражаемому в зонах со второй v120b-2 по пятую v120b-5 поля обзора падать на первую отражающую зону 121b-1.
Каждый экран 122b может иметь трапециевидную форму, так что он может соответствовать боковой поверхности отражающего зеркала 121b, как показано на фиг. 6B. Каждый экран 122b может использовать материал, способный эффективно абсорбировать свет, для того чтобы экранировать отраженный свет, поступающий из зон поля обзора, отличающихся от соответствующей зоны поля обзора.Each
Установлено множество фотодиодов 123b-1, 123b-2, 123b-3, 123b-4 и 123b-5 для обеспечения соответствия надлежащим отражающим зонам 121b-1, 121b-2, 121b-3, 121b-4 и 121b-5. Фотодиоды 123b-1, 123b-2, 123b-3, 123b-4 и 123b-5 обнаруживают отраженный свет, отражаемый из соответствующих отражающих зон 121b-1, 121b-2, 121b-3, 121b-4 и 121b-5. Например, первый фотодиод 123b-1 обнаруживает количество света, путь прохождения которого изменен первой отражающей зоной 121b-1 в отражающем зеркале 121b после отражения препятствием, расположенным в первой зоне v120b поля обзора.A plurality of
Далее будет описано определение направления на препятствие роботом-уборщиком 1. Робот-уборщик 1 может определять направление на препятствие, основываясь на одном из фотодиодов 123b, который обнаружил отраженный свет.Next, the determination of the direction of the obstacle by the
Например, как показано на фиг. 6D, робот-уборщик 1 излучает плоский свет, и этот плоский свет затем отражается препятствием O, расположенным в первой зоне v120b-1 поля обзора. Отраженный свет, отражаемый препятствием O, падает на отражающее зеркало 121b в приемнике 120b света.For example, as shown in FIG. 6D, the
В этом случае отраженный свет падает не только на первую отражающую зону 121b-1, соответствующую первой зоне v120b-1 поля обзора, но также он падает на отражающие зоны со второй 121b-2 по пятую 121b-5. Однако отраженный свет, падающий на отражающие зоны со второй 121b-2 по пятую 121b-5, блокируется экранами 122b, соответствующими первой отражающей зоне 121b. В соответствии с этим только отраженный свет, падающий на первую отражающую зону 121b-1, отражается от отражающего зеркала 121b и затем падает на первый фотодиод 123b-1. В результате отраженный свет, отражаемый препятствием O, расположенным в первой зоне v120-1 поля обзора, обнаруживается только первым фотодиодом 123b-1.In this case, the reflected light falls not only on the first
Когда первый фотодиод 123b-1 обнаруживает отраженный свет, робот-уборщик 1 может определить, что препятствие O находится в первой зоне v120b-1 обзора.When the
Далее будет описано определение роботом-уборщиком 1 расстояния до препятствия. Расстояние до препятствия определяется, основываясь на количестве света, обнаруженного фотодиодом 123b робота-уборщика 1.Next, the determination by the
На фиг. 6E представлен график, поясняющий определение расстояния до препятствия роботом-уборщиком, который включает в себя другой пример приемника света в модуле обнаружения препятствий согласно типовому варианту осуществления.In FIG. 6E is a graph explaining the determination of the distance to an obstacle by a robot cleaner that includes another example of a light receiver in an obstacle detection module according to an exemplary embodiment.
Выходной сигнал I фотодиода 123b, соответствующий расстоянию d до препятствия, показан на фиг. 6E. Говоря более подробно, когда расстояние d до препятствия короче заданного фокусного расстояния, входной сигнал I фотодиода 123b постепенно увеличивается в соответствии с увеличением расстояния d до препятствия.The output signal I of the
Такое явление обусловливается характеристиками модуля обнаружения препятствий, который использует свет. Излучатель света излучает свет при условии, что свет фокусируется в позиции, отнесенной от излучателя света на предопределенное расстояние, для того чтобы обеспечить усиление восприимчивости к препятствию, расположенному в позиции, удаленной от излучателя света на предопределенное расстояние. В этом случае приемник света обеспечивает на выходе максимальное выходное значение в ответ на свет, отраженный от препятствия, расположенного в позиции, удаленной от излучателя света на предопределенное расстояние. В соответствии с этим, фотодиод 123b обеспечивает на выходе максимальное выходное значение, когда препятствие располагается в позиции, удаленной от излучателя света на фокусное расстояние. Когда препятствие располагается в позиции, удаленной от излучателя света на расстояние короче или длиннее фокусного расстояния, выходное значение фотодиода 123b уменьшается. Благодаря таким характеристикам модуля обнаружения препятствий, использующего свет, может оказаться возможным не обращать внимания на расстояния короче фокусного расстояния, располагая фотодиод 123b в позиции, отнесенной назад от самого переднего участка робота-уборщика 1 на фокусное расстояние.This phenomenon is due to the characteristics of the obstacle detection module that uses light. The light emitter emits light, provided that the light is focused at a position spaced a predetermined distance from the light emitter in order to provide increased susceptibility to an obstacle located at a position remote from the light emitter at a predetermined distance. In this case, the light receiver provides the maximum output value in response to the light reflected from the obstacle located at a position remote from the light emitter at a predetermined distance. Accordingly, the
Робот-уборщик 1 может определять расстояние d до препятствия, основываясь на выходном сигнале I фотодиода 123b, соответствующем расстоянию d до препятствия, как показано на фиг. 6E. Например, когда выходной сигнал фотодиода 123b имеет первое выходное значение I1, робот-уборщик 1 может определить расстояние до препятствия как первое расстояние d1. Когда выходной сигнал фотодиода 123b имеет второе выходное значение I2, робот-уборщик 1 может определить расстояние до препятствия как второе расстояние d2. В случае же, когда выходной сигнал фотодиода 123b имеет третье выходное значение I3, робот-уборщик 1 может определить расстояние до препятствия как третье расстояние d3.The cleaning
Коротко говоря, когда робот-уборщик включает в себя приемник света, использующий множество фотодиодов, он может определять направление на препятствие, основываясь на одном из фотодиодов, который обнаружил отраженный свет, и может определять расстояние до этого препятствия, основываясь на значении выходного сигнала от фотодиода.In short, when a robot cleaner includes a light receiver using multiple photodiodes, it can determine the direction of the obstacle based on one of the photodiodes that detected the reflected light, and can determine the distance to this obstacle based on the value of the output signal from the photodiode .
Выше был описан приемник света в модуле обнаружения препятствий. Ниже будет описан излучатель света в модуле обнаружения препятствий.The light detector in the obstacle detection module has been described above. The light emitter in the obstacle detection module will be described below.
На фиг. 7A представлен вид, иллюстрирующий пример широкоугольной линзы, включенной в состав модуля обнаружения препятствий, согласно типовому варианту реализации. На фиг. 7B представлен вид, иллюстрирующий рассеяние плоского света, исходящего из первой приводимой в качестве примера широкоугольной линзы, включенной в состав модуля обнаружения препятствий, согласно типовому варианту реализации.In FIG. 7A is a view illustrating an example of a wide-angle lens included in an obstacle detection module according to an exemplary embodiment. In FIG. 7B is a view illustrating the scattering of plane light emanating from a first exemplary wide-angle lens included in an obstacle detection module according to an exemplary embodiment.
Как показано на фиг. 7A и 7B, первая широкоугольная линза, которая обозначена ссылочной позицией “111a”, может включать в себя прозрачный элемент, позволяющий свету, падающему на него от источника света (не показан), проходить через него.As shown in FIG. 7A and 7B, the first wide-angle lens, which is denoted by the reference numeral “111a”, may include a transparent element allowing light incident on it from a light source (not shown) to pass through it.
Первая широкоугольная линза 111a может включать в себя первую рассеивающую поверхность u1 для преломления света, падающего от источника света, с тем чтобы рассеивать падающий свет в пределах первой широкоугольной линзы 111a, вторую рассеивающую поверхность u2 для преломления света, преломленного первой рассеивающей поверхностью u1, за пределы первой широкоугольной линзы 111a для генерации плоского света, и удерживающую полость u4, образованную на поверхности, противоположной первой рассеивающей поверхности u1, для удержания находящегося в ней источника света.The first wide-
Например, первая широкоугольная линза 111a может включать в себя рассеяние плоского света в пределах угла 120°. В этом случае вторая рассеивающая поверхность u2 первой широкоугольной линзы 111a может иметь выпуклую форму, для того чтобы сделать более тонким плоский свет, рассеиваемый в первой широкоугольной линзе 111a.For example, the first wide-
Далее будет описан путь прохождения света в первой широкоугольной линзе 111a. Сначала свет, испускаемый источником света, преломляется первой рассеивающей поверхностью u1 первой широкоугольной линзы 111a. Преломленный свет затем рассеивается в пределах первой широкоугольной линзы 111a.Next, the light path in the first wide-
Свет, который рассеивается в различных направлениях, проходя через первую рассеивающую поверхность u1, снова рассеивается в различных направлениях, проходя через вторую рассеивающую поверхность u2. То есть свет преобразуется в плоский свет.Light that scatters in different directions passing through the first scattering surface u1 is again scattered in different directions passing through the second scattering surface u2. That is, the light is converted into flat light.
Описанная выше первая широкоугольная линза 111a может иметь форму, показанную на фиг. 7A. Конечно, первая широкоугольная линза 111a не ограничивается этой показанной формой. На фиг. 7C представлен вид, иллюстрирующий состояние, в котором первая широкоугольная линза 111a, соответствующая типовому варианту осуществления, установлена в модуле обнаружения препятствий.The first wide-
Как показано на фиг. 7C, источник света 112 в излучателе 110 света испускает свет в направлении, параллельном полу. As shown in FIG. 7C, the
Первая широкоугольная линза 111a может рассеивать в направлении вперед плоский свет, генерируемый в соответствии с преломлением или отражением света, исходящего от источника 112 света. Такой плоский свет может излучаться в направлении, параллельном полу, или в направлении, наклонном по отношении к полу.The first wide-
В результате модуль обнаружения препятствий может обнаруживать препятствие, расположенное на более высоком или более низком уровне, чем тот, когда препятствие располагается на полу. As a result, the obstacle detection module can detect an obstacle located at a higher or lower level than that when the obstacle is located on the floor.
Отраженный свет может отражаться препятствием, и отраженный свет может снова отражаться после передачи его на отражающее зеркало 121.The reflected light may be reflected by an obstacle, and the reflected light may be reflected again after being transmitted to the reflecting
Отраженный свет, отражаемый отражающим зеркалом 121, может передаваться в оптический датчик 123.The reflected light reflected by the reflecting
На фиг. 7D показан вид, представляющий вторую широкоугольную линзу, включенную в состав модуля обнаружения препятствий, согласно типовому варианту реализации. На фиг. 7E показан вид, иллюстрирующий рассеяние плоского света, исходящего из второй широкоугольной линзы, включенной в состав модуля обнаружения препятствий, согласно типовому варианту реализации.In FIG. 7D is a view showing a second wide-angle lens included in an obstacle detection module according to an exemplary embodiment. In FIG. 7E is a view illustrating the scattering of plane light emanating from a second wide-angle lens included in an obstacle detection module according to an exemplary embodiment.
Как показано на фиг. 7D и 7E, вторая широкоугольная линза, которая обозначена ссылочной позицией “111b”, может включать в себя прозрачный элемент, позволяющий свету, падающему на него от источника света (не показан), проходить через него. Источник света обозначен ссылочной позицией “112”. Вторая широкоугольная линза 111b отражает или преломляет свет, падающий от источника 112 света, генерируя тем самым плоский свет L1 и плоский свет L2. Вторая широкоугольная линза 111b может включать в себя первую рассеивающую поверхность u1 для преломления света, падающего от источника 112 света, с тем чтобы рассеивать падающий свет в пределах второй широкоугольной линзы 111b, вторую рассеивающую поверхность u2 для преломления света, преломленного первой рассеивающей поверхностью u1, за пределы второй широкоугольной линзы 111b или отражения света, преломленного первой рассеивающей поверхностью u1, в направлении внутрь второй широкоугольной линзы 111b, третью рассеивающую поверхность u3 для преломления света, преломленного первой рассеивающей поверхностью u1, или света, отраженного второй рассеивающей поверхностью u2, с целью генерации плоского света, и удерживающую полость u4, образованную на поверхности, противоположной первой рассеивающей поверхности u1, для удержания находящегося в ней источника 112 света.As shown in FIG. 7D and 7E, the second wide-angle lens, which is denoted by the reference numeral “111b”, may include a transparent element allowing light incident on it from a light source (not shown) to pass through it. The light source is indicated by the reference numeral “112”. The second wide-
Например, плоский свет может включать в себя первый плоский свет L1 и второй плоский свет L2. Первый плоский свет L1 генерируется как свет, преломленный первой рассеивающей поверхностью u1 и снова преломленный второй рассеивающей поверхностью u2. С другой стороны, второй плоский свет L2 генерируется как свет, преломленный первой рассеивающей поверхностью u1 и отраженный второй рассеивающей поверхностью u2.For example, a planar light may include a first planar light L1 and a second planar light L2. The first plane light L1 is generated as light refracted by the first scattering surface u1 and again refracted by the second scattering surface u2. On the other hand, the second plane light L2 is generated as light refracted by the first scattering surface u1 and reflected by the second scattering surface u2.
Вторая рассеивающая поверхность u2 может генерировать первый плоский свет L1 и второй плоский свет L2, преломляя или отражая свет.The second scattering surface u2 may generate a first plane light L1 and a second plane light L2 by refracting or reflecting the light.
Вторая рассеивающая поверхность u2 может включать в себя U- или V-образную вогнутую структуру, образованную на поверхности второй широкоугольной линзы 111b.The second scattering surface u2 may include a U- or V-shaped concave structure formed on the surface of the second wide-
Вторая рассеивающая поверхность u2 может включать в себя первую поверхность u20, образованную на центральном участке второй рассеивающей поверхности u2, продолжаясь перпендикулярно к направлению вперед в форме плоской поверхности, и вторые поверхности u22, имеющие криволинейную форму, образующую заданный угол по отношению к первой поверхности u20. The second scattering surface u2 may include a first surface u20 formed on the central portion of the second scattering surface u2, extending perpendicular to the forward direction in the form of a flat surface, and second surfaces u22 having a curved shape forming a predetermined angle with respect to the first surface u20.
Первая поверхность u20 может генерировать плоский свет, преломляя свет, отраженный первой рассеивающей поверхностью u1, тогда как вторые поверхности u22 могут отражать, по направлению к третьей рассеивающей поверхности u3, свет, отраженный второй рассеивающей поверхностью u2. Диапазон рассеяния плоского света может регулироваться в соответствии с заданным углом или кривизной вторых поверхностей u22.The first surface u20 can generate flat light by refracting the light reflected by the first scattering surface u1, while the second surfaces u22 can reflect, towards the third scattering surface u3, the light reflected by the second scattering surface u2. The scattering range of plane light can be adjusted in accordance with a predetermined angle or curvature of the second surfaces u22.
Альтернативно вторая рассеивающая поверхность u2 или третья рассеивающая поверхность u3 может иметь выпуклую форму для уменьшения толщины плоского света, а именно для того, чтобы сделать плоский свет более тонким. Alternatively, the second scattering surface u2 or the third scattering surface u3 may have a convex shape to reduce the thickness of the plane light, namely, to make the plane light thinner.
Удерживающая полость u4 может быть образована по центру поверхности, противоположной второй рассевающей поверхности u2. В этом случае первая рассеивающая поверхность u1 может быть дополнительно образована на внутренней поверхности удерживающей полости u4 в форме вогнутой структуры.The holding cavity u4 may be formed at the center of the surface opposite the second scattering surface u2. In this case, the first scattering surface u1 may be further formed on the inner surface of the holding cavity u4 in the form of a concave structure.
Ниже будет описан путь прохождения света во второй широкоугольной линзе 111b.The light transmission path in the second wide-
Сначала сет, исходящий от источника 112 света, преломляется первой рассеивающей поверхностью u1 второй широкоугольной линзы 111b, проходя через первую рассеивающую поверхность u1. Преломленный свет рассеивается затем в пределах второй широкоугольной линзы 111b. Часть света, рассеянного в пределах второй широкоугольной линзы 111b, преломляется, проходя через вторую рассеивающую поверхность u2, и, как таковая, может излучаться за пределы второй широкоугольной линзы 111b. Этот свет именуется первым плоским светом L1.First, the set emanating from the
Когда свет проходит через вторую рассеивающую поверхность u2, он преломляется под углом преломления, который больше угла его падения, поскольку этот случай соответствует случаю, в котором свет падает из среды с высокой плотностью на среду с низкой плотностью. В соответствии с таким преломлением преломленный свет рассеивается в различных направлениях. Часть первого плоского света L1 преломляется дважды, по той причине, что она падает на вторую широкоугольную линзу 111b, проходя через вторую рассеивающую поверхность u2 второй широкоугольной линзы 111b, и затем излучается за пределы второй широкоугольной линзы 111b в виде первого плоского света L1. В соответствии с генерацией такого первого плоского света L1 зона излучения плоского света излучателем 110 света расширяется.When light passes through the second scattering surface u2, it is refracted at an angle of refraction that is greater than its angle of incidence, since this case corresponds to the case in which light is incident from a high-density medium onto a low-density medium. According to such refraction, the refracted light is scattered in different directions. Part of the first plane light L1 is refracted twice, because it falls on the second wide-
Оставшаяся часть света, рассеиваемого внутрь второй широкоугольной линзы 111b, может отражаться второй рассеивающей поверхностью u2 по направлению внутрь второй широкоугольной линзы 111b.The remaining part of the light scattered inside the second wide-
То есть, когда свет, падающий на вторую широкоугольную линзу 111b, достигает граничной поверхности материала, обладающего меньшим коэффициентом преломления, чем вторая широкоугольная линза 111b, а именно, вторая рассеивающая поверхность u2, свет может полностью отражаться, поскольку явление полного отражения происходит на такой поверхности.That is, when the light incident on the second wide-
Для обеспечения такого явления полного отражения может оказаться необходимым, чтобы угол падения света был равен или превышал критический угол. Для того чтобы угол падения света был равен или превышал критический угол, может оказаться необходимым регулировать коэффициент преломления материала и форму второй широкоугольной линзы 111b. To ensure such a phenomenon of total reflection, it may be necessary that the angle of incidence of light be equal to or exceed the critical angle. In order for the angle of incidence of light to be equal to or greater than the critical angle, it may be necessary to adjust the refractive index of the material and the shape of the second wide-
Свет, отраженный в направлении внутрь второй широкоугольной линзы 111b второй рассеивающей поверхностью u2, преломляется, проходя через третью рассеивающую поверхность u3, и, как таковой, может излучаться за пределы второй широкоугольной линзы 111b. Этот свет именуется вторым плоским светом L2.Light reflected inwardly from the second wide-
Например, плоский свет может рассеиваться параллельно полу в пределах заданного угла по отношению к направлению вперед (в направлении оси x) второй широкоугольной линзы 111b. For example, flat light can be scattered parallel to the floor within a predetermined angle with respect to the forward direction (in the x-axis direction) of the second wide-
Заданный угол может составлять 110° влево или вправо относительно направления вперед (направления по оси x) второй широкоугольной линзы 111b, и при этом плоский свет может излучаться в состоянии, будучи полностью рассеянным в пределах угла 220°. Конечно, заданный угол не ограничивается приведенным в качестве примера углом.The predetermined angle may be 110 ° to the left or right with respect to the forward direction (x-axis direction) of the second wide-
Приводимое ниже описание будет дано применительно к случаю, в котором сумма углов, продолжающихся в левом и правом направлениях по отношению к направлению вперед (направлению по оси x) второй широкоугольной линзы 111b равна 220°.The following description will be given with reference to a case in which the sum of the angles extending in the left and right directions with respect to the forward direction (x-axis direction) of the second wide-
На фиг. 7F показан вид, представляющий третью широкоугольную линзу, включенную в состав модуля обнаружения препятствий, согласно типовому варианту осуществления. На фиг. 7G представлен вид, иллюстрирующий рассеяние плоского света, исходящего из третьей широкоугольной линзы, включенной восстав модуля обнаружения препятствий, согласно типовому варианту осуществления. In FIG. 7F is a view showing a third wide-angle lens included in an obstacle detection module according to an exemplary embodiment. In FIG. 7G is a view illustrating the scattering of plane light emanating from a third wide-angle lens included in a rebound of an obstacle detection module according to an exemplary embodiment.
Как показано на фиг. 7F и 7G, третья широкоугольная линза, обозначенная ссылочной позицией “111c”, может включать в себя прозрачный элемент, позволяющий свету, падающему на него от источника света (не показан), походить через него. Третья широкоугольная линза 111c отражает или преломляет свет, падающий от источника света, генерируя тем самым плоский свет L1 и плоский свет L2.As shown in FIG. 7F and 7G, the third wide-angle lens, denoted by the reference numeral “111c”, may include a transparent element allowing light incident on it from a light source (not shown) to travel through it. The third wide-
Третья широкоугольная линза 111c может включать в себя первую рассеивающую поверхность u1 для преломления света, падающего от источника света, с тем чтобы рассеять падающий свет в пределах третьей широкоугольной линзы 111c, вторую рассеивающую поверхность u2 для преломления света, преломленного первой рассеивающей поверхностью u1, за пределы третьей широкоугольной линзы 111c или отражения света, преломленного первой отражающей поверхностью u1, в направлении внутрь третьей широкоугольной линзы 111c, третью рассеивающую поверхность u3 для преломления света, преломленного первой рассеивающей поверхностью u1, или света, отраженного второй рассеивающей поверхностью u2, для генерации плоского света, и удерживающую полость u4, образованную на поверхности, противоположной второй рассеивающей поверхности u2, для расположения в ней источника света.The third wide-
Третья широкоугольная линза 111c подобна второй широкоугольной линзе 111b за исключением того, что вторая рассеивающая поверхность u2 третьей широкоугольной линзы 111c образована волнообразными контурами, каждый из которых имеет заостренный гребень. Вследствие таких волнообразных контуров третья широкоугольная линза 111c может обеспечивать расширенный диапазон рассеяния плоского света.The third wide-
На фиг. 8A представлено изображение в перспективе в разобранном виде, иллюстрирующее четвертую широкоугольную линзу, включенную в состав модуля обнаружения препятствий, согласно типовому варианту осуществления. На фиг. 8B показан вид в перспективе, представляющий четвертую широкоугольную линзу, включенную в состав модуля обнаружения препятствий, согласно типовому варианту осуществления. На фиг. 8C представлен вид, иллюстрирующий рассеяние плоского света, исходящего от четвертой широкоугольной линзы, включенной в состав модуля обнаружения препятствий, согласно типовому варианту осуществления. На фиг. 8D представлен вид, иллюстрирующий состояние, в котором четвертая широкоугольная линза согласно типовому варианту осуществления установлена в модуле обнаружения препятствий.In FIG. 8A is an exploded perspective view illustrating a fourth wide-angle lens included in an obstacle detection module according to an exemplary embodiment. In FIG. 8B is a perspective view showing a fourth wide-angle lens included in an obstacle detection module according to an exemplary embodiment. In FIG. 8C is a view illustrating the scattering of plane light emanating from a fourth wide angle lens included in an obstacle detection module according to an exemplary embodiment. In FIG. 8D is a view illustrating a state in which a fourth wide-angle lens according to an exemplary embodiment is mounted in an obstacle detection module.
Как показано на фиг. 8A-8D, четвертая широкоугольная линза, которая обозначена ссылочной позицией “111d”, может генерировать плоский свет, отражая свет, испускаемый источником света. Источник света обозначен ссылочной позицией “112”. Четвертая широкоугольная линза 111d может включать в себя прозрачный элемент, позволяющий свету, падающему на него от источника 112 света, проходить через него. Четвертая широкоугольная линза 111d отражает или преломляет свет, падающий от источника 112 света, генерируя тем самым плоский свет.As shown in FIG. 8A-8D, the fourth wide-angle lens, which is indicated by the reference numeral “111d”, can generate flat light by reflecting the light emitted by the light source. The light source is indicated by the reference numeral “112”. The fourth wide-
Четвертая широкоугольная линза 111d может включать в себя первую рассеивающую поверхность u1 для преломления света, падающего от источника 112 света, с тем чтобы рассеивать падающий свет в пределах четвертой широкоугольной линзы 111d, вторую рассеивающую поверхность u2 для отражения света, преломленного первой рассеивающей поверхностью u1, в направлении внутрь четвертой широкоугольной линзы 111d, третью рассеивающую поверхность u3 для преломления света, отраженного второй рассеивающей поверхностью u2, для генерации плоского света, и удерживающую полость u4, образованную на поверхности, противоположной второй рассеивающей поверхности u2, для удержания в ней источника света.The fourth wide-
Вторая рассеивающая поверхность u2 может быть образована одной поверхностью четвертой широкоугольной линзы 111d, имя при этом вогнутую коническую форму.The second scattering surface u2 may be formed by one surface of the fourth wide-
Вторая рассеивающая поверхность u2 четвертой широкоугольной линзы 111d может быть поверхностью четвертой широкоугольной линзы 111d, образующей границу со средой, имеющей коэффициент преломления, отличающийся от коэффициента преломления четвертой широкоугольной линзы 111d.The second scattering surface u2 of the fourth wide-
Например, среда может быть воздухом, имеющим коэффициент преломления, соответствующий “1”, или может быть материалом, имеющим более низкий коэффициент преломления, чем четвертая широкоугольная линза 111d.For example, the medium may be air having a refractive index corresponding to “1”, or may be a material having a lower refractive index than the fourth wide-
Материал может быть выполнен так, чтобы быть соединенным с четвертой широкоугольной линзой 111d.The material may be configured to be connected to a fourth
Третья рассеивающая поверхность может быть боковой поверхностью четвертой широкоугольной линзы 111d и может иметь выпуклую форму, чтобы отражать свет, отраженный второй отражающей поверхностью u2, с тем чтобы дополнительно уменьшить толщину плоского света.The third diffusing surface may be the lateral surface of the fourth wide-
Удерживающая полость u4 имеет центральную ось, выровненную с центральной осью второй рассеивающей поверхности u2. Удерживающая полость u4 может быть выполнена в центре поверхности, противоположной второй рассеивающей поверхности u2, в форме вогнутой структуры. Хотя удерживающая полость u4 показана выполненной в четвертой широкоугольной линзе 111d, она может выполняться, будучи отделенной от четвертой широкоугольной линзы 111d, с тем чтобы подсоединяться к четвертой широкоугольной линзе 111d.The holding cavity u4 has a central axis aligned with the central axis of the second scattering surface u2. The holding cavity u4 can be made in the center of the surface opposite the second scattering surface u2, in the form of a concave structure. Although the holding cavity u4 is shown formed in the fourth wide-
Ниже будет описан путь прохождения света в четвертой широкоугольной линзе 111d. Сначала свет, исходящий от источника 112 света, преломляется первой рассеивающей поверхностью u1 четвертой широкоугольной линзы 111d, проходя через первую рассеивающую поверхность u1. Свет, выходящий от первой рассеивающей поверхности u1, отражается затем второй рассеивающей поверхностью u2 и после этого преломляется, проходя через третью рассеивающую поверхность u3, образованную на боковой поверхности четвертой широкоугольной линзы 111d. При этом свет преобразуется в плоский свет, проходя через третью рассеивающую поверхность u3, и, как таковой, может излучаться во всех направлениях в пределах 360°.The light transmission path in the fourth wide-
Между тем, принцип отражения света от второй рассеивающей поверхности u2 четвертой широкоугольной линзе 111d основан на принципе полного отражения. То есть, когда свет, падающий на четвертую широкоугольную линзу 111d, достигает граничной поверхности материала, имеющего более низкий коэффициент преломления, чем четвертая широкоугольная линза 111d, а именно, второй рассеивающей поверхности u2, свет может полностью отражаться, поскольку на этой поверхности происходит явление полного отражения.Meanwhile, the principle of reflection of light from the second scattering surface u2 of the fourth wide-
Для возникновения такого явления полного отражения может быть необходимым, чтобы угол падения света был равен или превышал критический угол. Для того чтобы угол падения был равен или превышал критический угол, может оказаться необходимой регулировка коэффициента преломления материала и высоты и радиуса второй отражающей поверхности u2, которая имеет коническую форму.For the occurrence of such a phenomenon of total reflection, it may be necessary that the angle of incidence of light be equal to or exceed the critical angle. In order for the incidence angle to be equal to or greater than the critical angle, it may be necessary to adjust the refractive index of the material and the height and radius of the second reflecting surface u2, which has a conical shape.
Закон Снелла применим к принципу отражения света на боковой поверхности четвертой широкоугольной линзы 111d.Snell's law applies to the principle of reflecting light on the side surface of the fourth wide-
Как показано на фиг. 6D, источник 112 света излучателя 110 света испускает свет в направлении, перпендикулярном полу.As shown in FIG. 6D, the
Четвертая широкоугольная линза 111d может рассеивать во всех направлениях плоский свет, генерируемый в соответствии с отражением света, испускаемого источником 112 света. Такой плоский свет может излучаться в направлении, параллельном полу, или в направлении, наклонном по отношению к полу.The fourth wide-
В результате модуль обнаружения препятствий может обнаруживать препятствие, расположенное на уровне выше или ниже уровня препятствия, расположенного на полу.As a result, the obstacle detection module can detect an obstacle located above or below the level of an obstacle located on the floor.
Плоский свет может отражаться препятствием, и отраженный свет может снова отражаться, будучи переданным на отражающее зеркало 121.Flat light may be reflected by an obstacle, and reflected light may be reflected again by being transmitted to the
Когда отраженный свет LR, еще раз отраженный отражающим зеркалом 121, падает на оптическую линзу 122, он преломляется оптической линзой 122, проходя через оптическую линзу 122. Свет, выходящий из оптической линзы 122, может передаваться на оптический датчик 123.When the reflected light LR, once again reflected by the reflecting
На фиг. 9A показан вид, представляющий прорезь, способную регулировать толщину плоского света, когда используется одна из первой по третью широкоугольных линз, согласно типовому варианту осуществления. На фиг. 9B показан вид, представляющий прорезь, способную регулировать толщину плоского света, когда используется четвертая широкоугольная линза, согласно типовому варианту осуществления.In FIG. 9A is a view showing a slot capable of adjusting the thickness of a plane light when one of the first to third wide-angle lenses is used, according to a typical embodiment. In FIG. 9B is a view showing a slot capable of adjusting the thickness of a flat light when a fourth wide-angle lens is used, according to a typical embodiment.
Как показано на фиг. 9A, по меньшей мере одна прорезь 114, имеющая узкий вертикальный зазор, может быть расположена перед первой, второй или третьей широкоугольной линзой 111a, 111b или 111c. Когда плоский свет, исходящий от первой, второй или третьей широкоугольной линзы 111a, 111b или 111c, проходит через прорезь 114, может создаваться более тонкий плоский свет, параллельный полу. Может оказаться возможным генерировать плоский свет, имеющий желаемую толщину, регулируя размер зазора, образованного в щели 114, имеющего обозначение “k”.As shown in FIG. 9A, at least one
Как показано на фиг. 9B, по меньшей мере одна прорезь 114, имеющая узкий вертикальный зазор, может быть расположена перед четвертой широкоугольной линзой 111d. Когда плоский свет, исходящий от четвертой широкоугольной линзы 111d, проходит через прорезь 114, может создаваться более тонкий плоский свет, параллельный полу. Может оказаться возможным генерировать плоский свет, имеющий желаемую толщину, регулируя размер k зазора, образованного в щели 114.As shown in FIG. 9B, at least one
На фиг. 10A представлен вид, иллюстрирующий результаты обнаружения препятствий, полученные, когда размер прорези в модуле обнаружения препятствий большой, согласно типовому варианту осуществления. На фиг. 10B представлен вид, иллюстрирующий результаты обнаружения препятствий, полученные, когда размер прорези в модуле обнаружения препятствий небольшой, согласно типовому варианту осуществления.In FIG. 10A is a view illustrating obstacle detection results obtained when a slot size in the obstacle detection module is large, according to an exemplary embodiment. In FIG. 10B is a view illustrating obstacle detection results obtained when the slot size in the obstacle detection module is small, according to an exemplary embodiment.
На фиг. 10A показаны результаты обнаружения препятствий модулем 100 обнаружения препятствий при большом размере k зазора прорези 114. В этом случае можно видеть, что свет, излучаемый излучателем 110 света, толстый. С другой стороны, на фиг. 10B показаны результаты обнаружения препятствий модулем 100 обнаружения препятствий при небольшом размере k зазора прорези 114. В этом случае можно видеть, что свет, излучаемый излучателем 110 света, тонкий.In FIG. 10A shows the obstacle detection results by the
На фиг. 11 схематически представлено соотношение между каждым составляющим элементом модуля обнаружения препятствий и препятствием для вычисления расстояния до препятствия согласно типовому варианту осуществления.In FIG. 11 is a schematic representation of the relationship between each constituent element of an obstacle detection module and an obstacle for calculating the distance to an obstacle according to a typical embodiment.
Угол, образующийся между падающим светом и отраженным светом в том случае, когда плоский свет, исходящий от источника 110 света, отражается от препятствия, а именно, угол θi, может определяться следующим выражением 1:The angle formed between the incident light and the reflected light in the case when the flat light coming from the
[Выражение 1][Expression 1]

Расстояние между модулем 100 обнаружения препятствий и препятствием, а именно, расстояние di, может быть выведено, используя “θi” и следующее выражение 2:The distance between the
[Выражение 2][Expression 2]

На фиг. 12A представлен вид сверху модуля обнаружения препятствий, соответствующего типовому варианту осуществления, и препятствий. На фиг. 12B представлен вид сбоку модуля обнаружения препятствий, соответствующего типовому варианту осуществления, и препятствий. На фиг. 12C представлен вид изображений, принятых датчиком изображений в модуле обнаружения препятствий, согласно типовому варианту осуществления.In FIG. 12A is a plan view of an obstacle detection module according to an exemplary embodiment and obstacles. In FIG. 12B is a side view of an obstacle detection module according to an exemplary embodiment and obstacles. In FIG. 12C is a view of images received by the image sensor in the obstacle detection unit according to an exemplary embodiment.
Последующее описание применимо к каждому из случаев, в которых используются с первой по четвертую широкоугольные линзы 111a-111d, соответственно.The following description applies to each of the cases in which the first to fourth wide-
Как показано на фиг. 12A, имеется ось x, продолжающаяся в переднем направлении по отношению к модулю 100 обнаружения препятствий, будучи параллельной полу, и ось y, перпендикулярная оси x. Первая зона, которая может восприниматься модулем обнаружения препятствий, присутствует на плоскости, образованной осью x и осью y.As shown in FIG. 12A, there is an x axis extending forward in relation to the
Первая зона может быть подобна зоне, определяемой дугой AB, которая определяется на окружности, имеющей радиус R, двумя линиями OA и OB, продолжающимися соответственно от центра O окружности к двум точкам A и B на окружности, имея при этом центральный угол AOB угла θ. В этом случае радиус R может быть расстоянием удаления.The first zone can be similar to the zone defined by the arc AB, which is defined on a circle having a radius R, two lines OA and OB, extending respectively from the center O of the circle to two points A and B on the circle, while having a central angle AOB of angle θ. In this case, the radius R may be a distance of removal.
Когда используется вторая широкоугольная линза 111b, “θ” может составлять 220°. Когда используется четвертая широкоугольная линза 111d, “θ” может иметь большее значение. Угол θ не ограничивается упомянутыми выше значениями и может иметь другие значения. В первой зоне находятся первое препятствие 5 и второе препятствие 6, расположенные в позициях, отнесенных на разные расстояния и под разными углами от начала O координат. соответственно. Препятствия, находящиеся в первой зоне, не ограничиваются первым препятствием 5 и вторым препятствием 6. Одно или более препятствий могут находиться в первой зоне. Последующее описание будет дано применительно к случаю, в котором в первой зоне имеются два препятствия, а именно, первое и второе препятствия 5 и 6. Первое препятствие 5 расположено в пределах углового диапазона, продолжающегося в направлении против часовой стрелки по отношению к оси x между углом 1β и углом 1α, будучи при этом отнесенным от начала O координат на расстояние g1. Второе препятствие 6 расположено в пределах углового диапазона, продолжающегося в направлении по часовой стрелке по отношению к оси x между углом 2α и углом 2β, будучи при этом отнесенным от начала O координат на расстояние g2.When a second wide-
Здесь “1α” является углом между осью x и концевой точкой 1a первого препятствия 5, отстоящей от оси x на максимальное расстояние, тогда как “1β” является углом между осью x и концевой точкой 1b первого препятствия 5, отстоящей от оси x на минимальное расстояние.Here, “1α” is the angle between the x axis and the
“2α” является углом между осью x и концевой точкой 2a второго препятствия 6, отстоящей от оси x на минимальное расстояние, тогда как “2β” является углом между осью x и концевой точкой 2b второго препятствия 6, отстоящей от оси x на максимальное расстояние.“2α” is the angle between the x-axis and the
Обращаясь к фиг. 12B, можно увидеть, что плоский свет, исходящий от излучателя 110 света, распространяется в направлении вперед от излучателя 110 света и затем предается в приемник 120 света, отражаясь препятствиями, удаленными от модуля 100 обнаружения препятствий на различные расстояния.Turning to FIG. 12B, it can be seen that planar light emanating from the
Последующее описание будет дано применительно к случаю, в котором отражающее зеркало 121 является коническим зеркалом.The following description will be given with reference to the case in which the reflecting
Когда препятствие располагается ближе к модулю 100 обнаружения препятствий, отраженный свет, отражаемый от препятствия, достигает точки ближе к вершине отражающего зеркала 121. Когда отраженный свет, отражаемый от препятствия, достигает точки ближе к вершине отражающего зеркала 121, отраженный свет, выходящий от оптической линзы 122, регистрируется в оптическом датчике 123 в положении ближе к центру оптического датчика 123.When the obstacle is closer to the
То есть, когда препятствие находится ближе к модулю 100 обнаружения препятствий, отраженный свет регистрируется в оптическом датчике 123 в положении ближе к центру оптического датчика 123.That is, when an obstacle is closer to the
Как показано на фиг. 12C, изображения первого и второго препятствий 5 и 6, регистрируемые в оптическом датчике 123, могут быть увидены. Отраженный свет, отражаемый от каждого препятствия после излучения его излучателем 110 света, регистрируется в оптическом датчике 123 в виде изображения, будучи отраженным отражающим зеркалом 121 и пройдя через оптическую линзу 122.As shown in FIG. 12C, images of the first and
Первое препятствие 5 регистрируется в пределах углового диапазона, продолжающегося в направлении влево по отношению к оси х, между углом 1β и углом 1α, будучи при этом отнесенным от начала O координат на расстояние g1′. То есть первое препятствие 5 регистрируется в оптическом датчике 123 в виде фигуры, подобной дуге 5′, определяемой на окружности, имеющей радиус g1′, двумя радиальными линиями O′1a′ и O′1b′ соответственно, продолжающимися от центра O′ окружности к двум точкам 1a′ и 1b′ на окружности.The
Второе препятствие 6 регистрируется в пределах углового диапазона, продолжающегося в направлении вправо по отношению к оси х, между углом 2α и углом 2β, будучи при этом отнесенным от начала O координат на расстояние g2′. То есть второе препятствие 6 регистрируется в оптическом датчике 123 в виде фигуры, подобной дуге 6′, определяемой на окружности, имеющей радиус g2′, двумя радиальными линиями O′2a′ и O′2b′ соответственно, продолжающимися от центра O′ окружности к двум точкам 2a′ и 2b′ на окружности.The
Электрические сигналы изображений, преобразуемые оптическим датчиком 123, преобразуются в цифровые сигналы изображений схемой 124 обработки изображений. Цифровые сигналы изображений передаются в контроллер обнаружения препятствий (не показан) или в устройство управления (не показано). Контроллер обнаружения препятствий или устройство управления анализирует изображения, основываясь на цифровых сигналах изображения, в которые были преобразованы изображения, чтобы определить расстояние от модуля 100 обнаружения препятствий до соответствующих препятствий 5 и 6 и позиции препятствий 5 и 6.The electrical image signals converted by the
На фиг. 13A показан вид сверху множества излучателей света, которые включены в состав модуля обнаружения препятствий, будучи установленными в позициях, имеющих разные уровни, согласно типовому варианту осуществления, и препятствия. На фиг. 13B показан вид сбоку множества излучателей света, которые включены в состав модуля обнаружения препятствий, будучи установленными в позициях, имеющих разные уровни, согласно типовому варианту осуществления, и препятствия. На фиг. 13C представлен вид плоского света, принятого датчиком изображений в форме изображения после его излучения от каждого из множества излучателей света, включенных в состав модуля обнаружения препятствий и установленных на разных уровнях согласно типовому варианту осуществления, и отражения препятствием согласно типовому варианту осуществления.In FIG. 13A is a plan view of a plurality of light emitters that are included in an obstacle detection module, when installed in positions having different levels, according to a typical embodiment, and an obstacle. In FIG. 13B is a side view of a plurality of light emitters that are included in an obstacle detection module, being installed in positions having different levels, according to a typical embodiment, and an obstacle. In FIG. 13C is a view of a planar light received by an image sensor in the form of an image after it is emitted from each of a plurality of light emitters included in an obstacle detection module and installed at different levels according to an exemplary embodiment, and reflected by an obstruction according to an exemplary embodiment.
Последующие описание применимо к каждому из случаев, в которых используются, соответственно, с первой по четвертую широкоугольные линзы 111a-111d.The following description applies to each of the cases in which the first to fourth wide-
Как показано на фиг. 13A, имеется первая зона, которая описана со ссылкой на фиг. 10A. В этой зоне присутствует препятствие 2. Одно или более препятствий могут присутствовать в первой зоне. Последующее описание будет дано применительно к случаю, в котором в первой зоне имеется одно препятствие.As shown in FIG. 13A, there is a first zone that is described with reference to FIG. 10A. An
Модуль обнаружения препятствий (не показан) включает в себя три излучателя 11oa, 110b и 110c света и один приемник 120 света. Три излучателя 11oa, 110b и 110c света излучают плоский свет на разных уровнях от пола, соответственно. Плоский свет, излученный каждым из трех излучателей 11oa, 110b и 110c света, может прямолинейно распространятся параллельно полу или может прямолинейно распространяться наклонно по отношению к полу. Три излучателя 11oa, 110b и 110c света могут располагаться в одной и той же позиции на роботе-уборщике 1 или могут располагаться в разных позициях на роботе-уборщике 1, соответственно.An obstacle detection module (not shown) includes three light emitters 11oa, 110b and 110c and one
Например, излучатели 110a, 110b и 110c света, показанные на фиг. 13A, располагаются в одной и той же позиции на роботе-уборщике 1 и, соответственно, излучают плоский свет на разных уровнях от пола.For example, the
Конечно, число излучателей 110 света не ограничивается приведенным выше числом. Число излучателей 110 света может равняться одному или более. Кроме того, не существует ограничения на позиции множества излучателей 110a, 110b и 110c света на роботе-уборщике 1.Of course, the number of
Приемник 120 света моет принимать отраженные световые лучи, соответственно отражаемые от препятствия 2 после излучения их множеством излучателей 110a, 110b и 110c света в одновременном или последовательном порядке.The
Обращаясь к фиг. 13B, можно увидеть, что плоский свет, излученный каждым из трех излучателей 110a, 110b и 110c света, распространяется прямолинейно в направлении вперед от соответствующего излучателя 110a, 110b или 110c и затем передается на приемник 120, будучи отраженным препятствием 2.Turning to FIG. 13B, it can be seen that the planar light emitted by each of the three
Последующее описание будет дано применительно к случаю, в котором отражающее зеркало 121 является коническим зеркалом.The following description will be given with reference to the case in which the reflecting
Когда уровень, на котором плоский свет отражается от препятствия 2, находится ближе к полу, отраженный свет, отражаемый от препятствия 2, достигает точки, находящейся ближе к вершине отражающего зеркала 121. Кода отраженный свет, отражаемый от препятствия 2, достигает точки, находящейся ближе к вершине отражающего зеркала 121, отраженный свет, выходящий от оптической линзы 122, регистрируется в оптическом датчике 123 в положении ближе к центру оптического датчика 123. То есть, когда уровень, на котором плоский свет отражается от препятствия, находится ближе к полу, отраженный свет регистрируется в оптическом датчике в положении ближе к центру оптического датчика 123.When the level at which the plane light is reflected from the
Обращаясь к фиг. 13C, можно увидеть изображения препятствия 2, зарегистрированные на оптическом датчике 123. Отраженный свет, отражаемый от препятствия 2 после излучения его каждым из излучателей 110a, 110b и 110c света, регистрируется в оптическом датчике 123 в виде изображения, отражаясь отражающим зеркалом 121 и проходя через оптическую линзу 122.Turning to FIG. 13C, images of the
Когда имеется множество излучателей света, например, излучатели 110a, 110b и 110c света, один из излучателей 110a, 110b и 110c света может быть определен как опорный излучатель света. Опорный излучатель света может задавать расстояние между модулем 100 обнаружения препятствий и препятствием. Последующее описание будет дано применительно к случаю, в котором второй излучатель 110b света определяется как опорный излучатель света.When there are many light emitters, for example,
Плоский свет, излученный вторым излучателем 110b света, отражается на уровне 2e препятствия 2. Основываясь на плоском свете, излученном вторым излучателем 110b света, препятствие 2 регистрируется в пределах углового диапазона, продолжающегося в направлении против часовой стрелки по отношению к оси x между углом 1β и углом 1α, будучи отнесенным от начала O′ координат на расстояние g1′. То есть препятствие 2 регистрируется в оптическом датчике 123 в виде фигуры, подобной дуге 2′, определенной на окружности, имеющей радиус g1′, двумя радиальными линиями O′1a′ и O′1b′, соответственно, продолжающимися от центра O′ окружности до двух точек 1a′ и 1b′ на этой окружности.The flat light emitted by the
Плоский свет, излученный первым излучателем 110a света, отражается на уровне 1e препятствия 2. Плоский свет, излученный первым излучателем 110a света, регистрируется в оптическом датчике 123 в положении, отстоящем от центра O′ на большее расстояние, чем расстояние g1′,в виде фигуры, подобной дуге 4′. The flat light emitted by the
Плоский свет, излученный третьим излучателем 110c света, отражается на уровне 3e препятствия 2. Плоский свет, излученный третьим излучателем 110c света, регистрируется в оптическом датчике 123 в положении, отстоящем от центра O′ на меньшее расстояние, чем расстояние g1′, в виде фигуры, подобной дуге 3′.The flat light emitted by the third
Электрические сигналы изображения, преобразуемые оптическим датчиком 123, преобразуются в цифровые сигналы изображения схемой 124 обработки изображений. Цифровые сигналы изображения передаются в контроллер обнаружения препятствий (не показан) или устройство управления (не показано). Контроллер обнаружения препятствий или устройство управления анализирует изображения, основываясь на цифровых сигналах изображения, в которые были преобразованы изображения, для определения расстояния между модулем 100 обнаружения препятствий и препятствием, позиции препятствия, высоты препятствия и формы препятствия.The electrical image signals converted by the
Контроллер обнаружения препятствий или устройство управления может определить высоту препятствия 2, основываясь на трех дугах 2′, 3′ и 4′, зарегистрированных в оптическом датчике 123, и уровнях 1e, 2e и 3e трех излучателей 110a, 110b и 110c света, установленных в модуле 100 обнаружения препятствий.The obstacle detection controller or control device can determine the height of the
На фиг. 14 показан вид сверху множества излучателей света, которые включены в состав модуля обнаружения препятствий, будучи установленными в разных позициях согласно типовому варианту осуществления, и препятствия.In FIG. 14 is a plan view of a plurality of light emitters that are included in an obstacle detection module, being installed in different positions according to a typical embodiment, and obstacles.
Как показано на фиг. 14, множество излучателей света, например, излучатели 110a, 110b и 110c света, могут устанавливаться в разных позициях на роботе-уборщике 1.As shown in FIG. 14, a plurality of light emitters, for example,
Например, второй излучатель 110b света и приемник 120 света могут быть установлены в одной и той же позиции на передней стороне робота-уборщика 1. Первый излучатель 110a света может быть установлен с левой стороны от второго излучателя 110b света, тогда как третий излучатель 110c света может быть установлен с правой стороны от второго излучателя 110b света. Контроллер обнаружения препятствий (не показан) или устройство управления (не показано) может определять расстояние между модулем обнаружения препятствий (не показан) и препятствием, позицию препятствия, высоту препятствия и форму препятствия подобным образом, как и в описанном выше случае, в котором множество излучателей 110a, 110b и 110c света установлено в одной и той же позиции.For example, the
Когда множество излучателей 110a, 110b и 110c света устанавливаются в разных позициях, зона обнаружения модуля обнаружения препятствий может быть расширена.When the plurality of
На фиг. 15A показан вид сбоку, иллюстрирующий расположение, при котором вторая широкоугольная линза установлена вертикально, чтобы позволить модулю обнаружения препятствий обнаруживать точку падения, согласно типовому варианту осуществления. На фиг. 15B представлен вид, иллюстрирующий расположение, при котором четвертая широкоугольная линза установлена вертикально, чтобы позволить модулю обнаружения препятствий обнаруживать точку падения, согласно типовому варианту осуществления.In FIG. 15A is a side view illustrating an arrangement in which a second wide-angle lens is mounted vertically to allow an obstacle detection module to detect a falling point, according to an exemplary embodiment. In FIG. 15B is a view illustrating an arrangement in which a fourth wide-angle lens is mounted vertically to allow an obstacle detection module to detect a point of incidence, according to an exemplary embodiment.
Как показано на фиг. 15A, вторая широкоугольная линза 110b установлена вертикально. Например, вторая широкоугольная линза 110b продолжается вертикально от пола. В соответствии с таким расположением плоский свет, исходящий от второй широкоугольной линзы 110b, излучается в направлении вперед в плоскости x-z.As shown in FIG. 15A, the second wide-
Излучатель 110 света может иметь прорезь (не показана). Эта прорезь может обеспечивать излучение тонкого плоского света.The
Как показано на фиг. 15B, четвертая широкоугольная линза 110d установлена вертикально. Например, четвертая широкоугольная линза 110d продолжается вертикально от пола. В соответствии с таким расположением плоский свет, исходящий от четвертой широкоугольной линзы 110d, излучается в плоскости x-z.As shown in FIG. 15B, the fourth
Излучатель 110 света может иметь прорезь (не показана). Эта прорезь может обеспечивать излучение тонкого плоского света.The
На фиг. 16A представлено состояние, в котором модуль обнаружения препятствий излучает плоский свет, когда отсутствует точка падения, согласно типовому варианту осуществления. На фиг. 16B показан вид, иллюстрирующий изображение плоского света, принятое датчиком изображений после отражения его от пола, когда отсутствует точка падения, согласно типовому варианту осуществления.In FIG. 16A shows a state in which an obstacle detection module emits flat light when there is no point of incidence, according to an exemplary embodiment. In FIG. 16B is a view illustrating a plane light image received by the image sensor after reflecting from the floor when there is no incidence point, according to an exemplary embodiment.
Как показано на фиг. 16A, модуль 100 обнаружения препятствий робота-уборщика 1 установлен внутри робота-уборщика 1. Для того чтобы определить точку падения, модуль 100 обнаружения препятствий может включать в себя одну из первой по четвертую широкоугольных линз (не показаны). Широкоугольные линзы наклонены вертикально.As shown in FIG. 16A, the
Конечно, модуль 100 обнаружения препятствий не ограничивается описанной выше конфигурацией. Модуль 100 обнаружения препятствий может иметь различные конфигурации при условии, что он будет излучать свет в направлении вперед в плоскости x-z.Of course, the
Плоский свет, излученный модулем 100 обнаружения препятствий, может распространяться в сторону пола в направлении вперед по отношению к модулю 100 обнаружения препятствий. Пол обозначен ссылочной позицией “9”. Плоский свет, излученный модулем 100 обнаружения препятствий, может достигать зоны на полу 9 между точкой P, расположенной вблизи передней стороны робота-уборщика 1, и точкой Q, удаленной от передней стороны робота-уборщика 1. В этом случае достигаемая светом зона пола 9 впереди модуля 100 обнаружения препятствий может быть зоной, продолжающейся в переднем направлении и имеющей при этом линейную форму. Плоский свет, распространяющийся в сторону пола 9, отражается от пола 9 и затем передается в модуль 100 обнаружения препятствий.The flat light emitted by the
На фиг. 16B показано изображение отраженного света, отражаемого от пола 9 и регистрируемого в оптическом датчике 123. Поскольку свет излучается излучателем света (не показан) в направлении вперед в плоскости x-z, отраженный свет регистрируется в оптическом датчике 123 в виде линии, продолжающейся в направлении, удаленном от центра O′.In FIG. 16B shows an image of reflected light reflected from the
Здесь ближняя точка P′ означает точку P пола, расположенную непосредственно перед роботом-уборщиком (не показан), тогда как дальняя точка Q′ означает самую удаленную точку Q пола, которая может быть обнаружена роботом-уборщиком (не показан).Here, the proximal point P ′ denotes the floor point P located directly in front of the robot cleaner (not shown), while the far point Q ′ denotes the farthest floor point Q that can be detected by the robot cleaner (not shown).
Контроллер обнаружения препятствий или устройство управления анализирует изображения, основываясь на цифровых сигналах изображения, в которые были преобразованы изображения, для определения того, существует ли точка падения впереди модуля 100 обнаружения препятствий. Из изображений, зарегистрированных в оптическом датчике 123, контроллер обнаружения препятствий или устройство управления распознает отраженный свет, непрерывно отражаемый между ближайшей точкой и наиболее удаленной точкой впереди модуля 100 обнаружения препятствий, чтобы определить, существует ли точка падения. Например, контроллер обнаружения препятствий или устройство управления может распознать, что существует отраженный свет, непрерывно отражаемый между ближней точкой P′ и удаленной точкой Q′ впереди робота-уборщика, основываясь на изображениях, зарегистрированных в датчике изображений. Кроме того, контроллер обнаружения препятствий или устройство управления может определить расстояние от робота-уборщика до самой удаленной точки Q и может определить, что отсутствует точка падения в зоне пола, продолжающейся до самой удаленной точки Q.An obstacle detection controller or control device analyzes the images based on the digital image signals into which the images were converted to determine if there is a point of incidence in front of the
На фиг. 17A представлено состояние, в котором модуль обнаружения препятствий излучает плоский свет, когда существует точка падения, согласно типовому варианту осуществления. На фиг. 17B показан вид, представляющий изображение плоского света, принятое датчиком изображений после отражения от пола, когда существует точка падения, согласно типовому варианту осуществления.In FIG. 17A shows a state in which an obstacle detection module emits flat light when there is a point of incidence, according to an exemplary embodiment. In FIG. 17B is a view showing a planar light image received by the image sensor after reflection from the floor when there is a point of incidence, according to an exemplary embodiment.
Как показано на фиг. 17A, модуль 100 обнаружения препятствий робота-уборщика 1 установлен внутри робота-уборщика 1. Для того чтобы определить точку падения, модуль 100 обнаружения препятствий включает в себя одну из первой по четвертую широкополосную линзу (не показана). Широкополосная линия наклонена вертикально. Конечно, модуль 100 обнаружения препятствий не ограничивается описанной выше конфигурацией. Модуль 100 обнаружения препятствий может иметь различные конфигурации при условии, что он будет излучать свет в направлении вперед в плоскости x-z.As shown in FIG. 17A, the
Плоский свет, излучаемый модулем 100 обнаружения препятствий, может распространяться в сторону пола в направлении вперед по отношению к модулю 100 обнаружения препятствий. Пол обозначен ссылочной позицией “9”. Плоский свет, излучаемый модулем 100 обнаружения препятствий, может достигать зоны на полу 9 между точкой P, расположенной вблизи передней стороны робота-уборщика 1, и точкой S, удаленной от передней стороны робота-уборщика 1. В этом случае достигаемая светом зона пола 9 впереди модуля 100 обнаружения препятствий может быть зоной, продолжающейся в переднем направлении и имеющей при этом линейную форму. Плоский свет, распространяющийся в сторону пола 9, отражается от пола 9 и затем передается в модуль 100 обнаружения препятствий.The flat light emitted by the
На фиг. 17B представлено изображение отраженного света, отражаемого от пола 9 и регистрируемого оптическим датчиком 123. Поскольку свет излучается излучателем света (не показан) в направлении вперед в плоскости x-z, отраженный свет регистрируется в оптическом датчике 123 в виде линии, продолжающейся в направлении, удаленном от центра O′.In FIG. 17B is an image of the reflected light reflected from the
Как показано на фиг. 17B, изображение, регистрируемое в оптическом датчике 123, может иметь линейную форму, продолжающуюся между точками P′ и S′. Здесь точка P′ относится к ближайшей точке P пола 9, расположенной перед роботом-уборщиком (не показан), тогда как точка S′ относится к точке S падения, расположенной перед роботом-уборщиком (не показан).As shown in FIG. 17B, the image recorded by the
Контроллер обнаружения препятствий или устройство управления анализирует изображения, основываясь на цифровых сигналах изображения, в которые были преобразованы изображения, для определения того, существует ли точка падения впереди модуля 100 обнаружения препятствий.An obstacle detection controller or control device analyzes the images based on the digital image signals into which the images were converted to determine if there is a point of incidence in front of the
Из изображений, зарегистрированных в оптическом датчике 123, контроллер обнаружения препятствий или устройство управления распознает отраженный свет, непрерывно отражаемый между ближайшей точкой и наиболее удаленной точкой впереди модуля 100 обнаружения препятствий, чтобы определить, существует ли точка падения.From the images recorded in the
Например, контроллер обнаружения препятствий или устройство управления может распознать, что существует отраженный свет, непрерывно отражаемый между ближней точкой P′ и удаленной точкой Q′ впереди робота-уборщика, основываясь на изображениях, зарегистрированных в датчике изображений.For example, an obstacle detection controller or control device may recognize that there is reflected light continuously reflected between a proximal point P ′ and a distant point Q ′ in front of the cleaning robot based on images recorded in the image sensor.
Кроме того, контроллер обнаружения препятствий или устройство управления может вычислить расстояние между роботом-уборщиком (не показан) и точкой падения.In addition, the obstacle detection controller or control device can calculate the distance between the cleaning robot (not shown) and the point of incidence.
Как следует из приведенного выше описания, может оказаться возможным генерировать равномерно распределенный плоский свет, используя модуль обнаружения препятствий согласно типовому варианту осуществления и, таким образом, обеспечивать повышение точности в обнаружении препятствий. Используя плоский свет, может оказаться возможным обнаруживать препятствия, находящиеся вокруг модуля обнаружения препятствий. Соответственно можно отказаться от установки множества датчиков или отдельного сервомеханизма. В связи с этим может быть обеспечено повышение эффективности с точек зрения экономии и структуры. Робот-уборщик, который оснащен модулем обнаружения препятствий, может точно обнаруживать существующие вокруг препятствия и, в силу этого, может эффективно передвигаться.As follows from the above description, it may be possible to generate uniformly distributed flat light using an obstacle detection module according to a typical embodiment, and thus provide improved accuracy in detecting obstacles. Using flat light, it may be possible to detect obstacles around the obstacle detection module. Accordingly, you can refuse to install multiple sensors or a separate servomechanism. In this regard, an increase in efficiency in terms of economy and structure can be achieved. The robot cleaner, which is equipped with an obstacle detection module, can accurately detect obstacles around it and, therefore, can move efficiently.
Робот-уборщик, который оснащен модулем обнаружения препятствий, может эффективно управлять модулем обнаружения препятствий в соответствии с положением робота-уборщика. Хотя были описаны немногие типовые варианты осуществления, специалистам в данной области техники должно быть понятно, что в эти варианты осуществления могут быть внесены изменения без отклонения от принципов и сущности изобретения, объем которого определяется в пунктах формулы изобретения и их эквивалентах.The robot cleaner that is equipped with an obstacle detection module can efficiently control the obstacle detection module in accordance with the position of the robot cleaner. Although few typical embodiments have been described, those skilled in the art will appreciate that changes can be made to these embodiments without departing from the principles and spirit of the invention, the scope of which is defined in the claims and their equivalents.
Claims (15)
по меньшей мере один излучатель света, содержащий источник света, широкоугольную линзу для преломления или отражения света, падающего на нее от источника света, для рассеяния падающего света в виде плоского света и устройство возбуждения источника света, побуждающее источник света испускать свет; и
приемник света, содержащий отражающее зеркало для отражения отраженного света, отражаемого препятствием, оптическую линзу, отнесенную от отражающего зеркала на заданное расстояние, чтобы позволить отраженному свету проходить через оптическую линзу, датчик изображений для приема отраженного света, выходящего из оптической линзы, и для генерации сигнала изображения из отраженного света, выходящего из оптической линзы, и схему обработки изображений для приема сигнала изображения и для преобразования принятого сигнала изображения в электрический сигнал изображения в виде цифрового сигнала изображения.1. A robot cleaner that includes a housing, a drive device for driving the housing, an obstacle detection module for detecting obstacles around the housing, and a control device for controlling the drive device based on the results obtained by the obstacle detection module, the obstacle detection module comprising :
at least one light emitter comprising a light source, a wide-angle lens for refracting or reflecting light incident on it from the light source, for scattering incident light in the form of a plane light, and a light source excitation device causing the light source to emit light; and
a light receiver comprising a reflecting mirror for reflecting reflected light reflected by the obstacle, an optical lens spaced apart from the reflecting mirror by a predetermined distance to allow reflected light to pass through the optical lens, an image sensor for receiving reflected light coming out of the optical lens, and for generating a signal images from the reflected light exiting from the optical lens, and an image processing circuit for receiving an image signal and for converting the received image signal to an insulating picture signal as a digital image signal.
по меньшей мере один излучатель света, содержащий источник света, широкоугольную линзу для преломления или отражения света, падающего от источника света, для рассеяния падающего света в виде плоского света, и возбуждающее устройство источника света, побуждающее источник света испускать свет; и
приемник света, содержащий отражающее зеркало для отражения света, отражаемого препятствием, для генерации отраженного света, оптическую линзу, отнесенную от отражающего зеркала на заданное расстояние, чтобы позволить отраженному свету проходить через оптическую линзу, датчик изображений для приема отраженного света, выходящего из оптической линзы, для генерации сигнала изображения из отраженного света, выходящего из оптической линзы, и схему обработки изображений для приема сигнала изображения и для преобразования принятого сигнала изображения в сигнал изображения в виде цифрового сигнала изображения.7. An obstacle detection module installed in the cleaning robot and comprising:
at least one light emitter comprising a light source, a wide-angle lens for refracting or reflecting light incident from the light source, for scattering incident light in the form of a plane light, and a light source exciting device causing the light source to emit light; and
a light detector comprising a reflecting mirror for reflecting light reflected by the obstacle to generate reflected light, an optical lens spaced apart from the reflecting mirror by a predetermined distance to allow reflected light to pass through the optical lens, an image sensor for receiving reflected light coming out of the optical lens, for generating an image signal from the reflected light exiting from the optical lens, and an image processing circuit for receiving an image signal and for converting the received signal image in the image signal as a digital image signal.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2012-0061059 | 2012-06-07 | ||
| KR20120061059 | 2012-06-07 | ||
| KR1020130061815A KR102143385B1 (en) | 2012-06-07 | 2013-05-30 | Fencing sense module and robot having the same |
| KR10-2013-0061815 | 2013-05-30 | ||
| PCT/KR2013/005020 WO2013183955A1 (en) | 2012-06-07 | 2013-06-07 | Obstacle sensing module and cleaning robot including the same |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU2591912C1 true RU2591912C1 (en) | 2016-07-20 |
Family
ID=49983743
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2014153133/02A RU2591912C1 (en) | 2012-06-07 | 2013-06-07 | Module for detecting obstacles and robot-cleaner including same |
Country Status (4)
| Country | Link |
|---|---|
| KR (1) | KR102143385B1 (en) |
| AU (1) | AU2013272382B2 (en) |
| IN (1) | IN2015DN00162A (en) |
| RU (1) | RU2591912C1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2775535C1 (en) * | 2018-12-21 | 2022-07-04 | Позитек Пауэр Тулз (Сюйчжоу) Ко., Лтд | Cleaning robot and cleaning method |
| WO2023150655A1 (en) * | 2022-02-04 | 2023-08-10 | Tennant Company | Surface maintenance machine light projection |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3087888B1 (en) | 2013-12-23 | 2019-08-14 | LG Electronics Inc. | Robot cleaner |
| KR102335186B1 (en) * | 2014-12-24 | 2021-12-03 | 삼성전자주식회사 | Lens assembly, obstacle detecting unit using the same, and moving robot having the same |
| CN106926245A (en) * | 2015-12-29 | 2017-07-07 | 天津西青区瑞博生物科技有限公司 | A kind of household cleaning machine people |
| US10213082B2 (en) * | 2016-08-30 | 2019-02-26 | Samsung Electronics Co., Ltd. | Robot cleaner |
| US10962647B2 (en) | 2016-11-30 | 2021-03-30 | Yujin Robot Co., Ltd. | Lidar apparatus based on time of flight and moving object |
| KR101868963B1 (en) * | 2016-12-19 | 2018-06-19 | 주식회사 카펙발레오 | Structure to the one direction over the distance by using the detected light |
| WO2019039728A1 (en) * | 2017-08-21 | 2019-02-28 | (주)유진로봇 | Ultra-small three-dimensional scanning lidar sensor |
| KR102135559B1 (en) * | 2018-05-16 | 2020-07-20 | 주식회사 유진로봇 | Compact 3D Scanning Lidar Sensor |
| US11579298B2 (en) | 2017-09-20 | 2023-02-14 | Yujin Robot Co., Ltd. | Hybrid sensor and compact Lidar sensor |
| US11874399B2 (en) | 2018-05-16 | 2024-01-16 | Yujin Robot Co., Ltd. | 3D scanning LIDAR sensor |
| KR102515485B1 (en) | 2018-06-14 | 2023-03-29 | 삼성전자주식회사 | Charging station of robot cleaner |
| CN111240308A (en) * | 2018-11-09 | 2020-06-05 | 北京奇虎科技有限公司 | Method and device for detecting repeated obstacle, electronic equipment and readable storage medium |
| KR20240008461A (en) * | 2022-07-11 | 2024-01-19 | 삼성전자주식회사 | Vacuum cleaner and method for controlling thereof |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2254227C1 (en) * | 2003-04-03 | 2005-06-20 | Эл Джи Электроникс Инк. | Movable robot including image pickup and method for measuring distance walked by robot |
| RU2262878C2 (en) * | 2002-07-26 | 2005-10-27 | Самсунг Гвангджу Электроникс Ко., Лтд. | Automatic vacuum cleaner |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1999046612A1 (en) * | 1998-03-10 | 1999-09-16 | Siemens Aktiengesellschaft | Optical sensor system for detecting the position of an object |
| JP2002073170A (en) | 2000-08-25 | 2002-03-12 | Matsushita Electric Ind Co Ltd | Movable working robot |
| US7852463B2 (en) | 2007-08-13 | 2010-12-14 | Honeywell International Inc. | Range measurement device |
| DE102009023066A1 (en) * | 2009-04-01 | 2010-10-07 | Vorwerk & Co. Interholding Gmbh | Automatically movable device, in particular self-propelled ground dust collecting device |
-
2013
- 2013-05-30 KR KR1020130061815A patent/KR102143385B1/en active IP Right Grant
- 2013-06-07 IN IN162DEN2015 patent/IN2015DN00162A/en unknown
- 2013-06-07 AU AU2013272382A patent/AU2013272382B2/en active Active
- 2013-06-07 RU RU2014153133/02A patent/RU2591912C1/en active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2262878C2 (en) * | 2002-07-26 | 2005-10-27 | Самсунг Гвангджу Электроникс Ко., Лтд. | Automatic vacuum cleaner |
| RU2254227C1 (en) * | 2003-04-03 | 2005-06-20 | Эл Джи Электроникс Инк. | Movable robot including image pickup and method for measuring distance walked by robot |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2775535C1 (en) * | 2018-12-21 | 2022-07-04 | Позитек Пауэр Тулз (Сюйчжоу) Ко., Лтд | Cleaning robot and cleaning method |
| RU2783801C1 (en) * | 2021-12-30 | 2022-11-17 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Петрозаводский государственный университет" | Device for analyzing the possibility of non-destructive movement or overcoming obstacles by a robotic complex |
| WO2023150655A1 (en) * | 2022-02-04 | 2023-08-10 | Tennant Company | Surface maintenance machine light projection |
| US11859795B2 (en) | 2022-02-04 | 2024-01-02 | Tennant Company | Surface maintenance machine light projection |
Also Published As
| Publication number | Publication date |
|---|---|
| IN2015DN00162A (en) | 2015-06-12 |
| AU2013272382A1 (en) | 2015-01-15 |
| KR20130137536A (en) | 2013-12-17 |
| AU2013272382B2 (en) | 2016-03-17 |
| KR102143385B1 (en) | 2020-08-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2591912C1 (en) | Module for detecting obstacles and robot-cleaner including same | |
| US9846435B2 (en) | Obstacle sensing module and cleaning robot including the same | |
| US11977183B2 (en) | 2D scanning high precision LiDAR using combination of rotating concave mirror and beam steering devices | |
| KR102335186B1 (en) | Lens assembly, obstacle detecting unit using the same, and moving robot having the same | |
| KR20130097623A (en) | Sensor assembly and robot cleaner having the same | |
| US11650295B2 (en) | Light detection and ranging device with a diverging and converging member where the converging member includes a plurality of reflectors | |
| CN112752984A (en) | Waveguide diffuser for LIDAR | |
| JP5944255B2 (en) | Operation member having light emitting unit and coordinate input system having the same | |
| JP2024017519A (en) | Measuring device, light reception unit, and light projection unit |