RU2509373C2 - Способ предотвращения несанкционированного использования летательного аппарата - Google Patents
Способ предотвращения несанкционированного использования летательного аппарата Download PDFInfo
- Publication number
- RU2509373C2 RU2509373C2 RU2012123805/11A RU2012123805A RU2509373C2 RU 2509373 C2 RU2509373 C2 RU 2509373C2 RU 2012123805/11 A RU2012123805/11 A RU 2012123805/11A RU 2012123805 A RU2012123805 A RU 2012123805A RU 2509373 C2 RU2509373 C2 RU 2509373C2
- Authority
- RU
- Russia
- Prior art keywords
- frequency
- aircraft
- voltage
- board
- phase
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 23
- 230000008859 change Effects 0.000 claims abstract description 9
- 239000002131 composite material Substances 0.000 claims abstract description 4
- 230000008569 process Effects 0.000 claims abstract description 4
- 230000010363 phase shift Effects 0.000 claims description 16
- 230000010355 oscillation Effects 0.000 claims description 14
- 238000001514 detection method Methods 0.000 claims description 7
- 230000001360 synchronised effect Effects 0.000 claims description 6
- 230000002159 abnormal effect Effects 0.000 claims description 5
- 238000002360 preparation method Methods 0.000 claims description 3
- 238000012544 monitoring process Methods 0.000 claims 1
- 238000004891 communication Methods 0.000 abstract description 7
- 230000000694 effects Effects 0.000 abstract description 3
- 239000000126 substance Substances 0.000 abstract 1
- 230000009471 action Effects 0.000 description 7
- 238000001069 Raman spectroscopy Methods 0.000 description 5
- 101000585507 Solanum tuberosum Cytochrome b-c1 complex subunit 7 Proteins 0.000 description 4
- 230000036039 immunity Effects 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 230000006378 damage Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 230000003321 amplification Effects 0.000 description 2
- 230000007123 defense Effects 0.000 description 2
- 238000001914 filtration Methods 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 238000003199 nucleic acid amplification method Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 201000004569 Blindness Diseases 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 229940052810 complex b Drugs 0.000 description 1
- 239000012141 concentrate Substances 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 125000004122 cyclic group Chemical group 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 230000002427 irreversible effect Effects 0.000 description 1
- 231100000897 loss of orientation Toxicity 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 230000008520 organization Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 231100000331 toxic Toxicity 0.000 description 1
- 230000002588 toxic effect Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images


Landscapes
- Traffic Control Systems (AREA)
Abstract
Изобретение относится к области техники, занимающейся разработкой бортовой аппаратуры и бортовых систем летательных аппаратов (ЛА), обеспечивающих как безопасность полетов, так и безопасность наземных объектов. Для предотвращения несанкционированного использования летательных аппаратов используют бортовую аппаратуру и аппаратуру, размещаемую на пункте управления воздушным движением для определения координат и параметров движения (ЛА), прогнозирования возможности нештатного изменения траектории полета. По полученным данным определяют и обрабатывают сложные сигналы, обладающие высокой энергетической и структурной скрытностью. Достигается повышение помехоустойчивости и надежности дуплексной радиосвязи между пунктом управления воздушным движением и летательным аппаратом путем подавления ложных сигналов (помех), принимаемых по зеркальным и комбинационным каналам. 4 ил.
Description
Предлагаемый способ относится к области техники, занимающейся разработкой бортовой аппаратуры и бортовых систем летательных аппаратов (ЛА), обеспечивающих как безопасность полетов, так и безопасность наземных объектов особой важности (атомные электростанции, арсеналы, пункты управления, учреждения государственной власти, склады и предприятия, места проведения массовых мероприятий и др.) при несанкционированном использовании ЛА недоброжелателями.
Известны способы обеспечения безопасности полетов (патенты РФ № №2.015.940, 2.089.449, 2.114.374, 2.115.163, 2.137.303, 2.137.678, 2.148.781, 2.151.714, 2.192.116, 2.228.543, 2.243.912, 2.343.530, 2.349.511, 2.446.481; патенты США №№4.706.198, 4.775.116, 4.821.982, 5.071.087; патент Франции №2.322.350, Доброленский Ю.П. и др. Методы инженерно-психологических исследований в авиации. - М., 1975, с.34 и др.).
Из известных способов наиболее близким к предлагаемому является «Способ предотвращения несанкционированного использования летательных аппаратов» (патент РФ №2.446.481, G08G 5/00, 2010), который и выбран в качестве прототипа.
В известном способе на борту летательного аппарата при его несанкционированном использовании формируют гармоническое колебание несущей частоты ωс, манипулируют его по фазе псевдослучайной последовательностью, которая является идентифицированным номером летательного аппарата. Сформулированный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием частоты ωГ1 первого гетеродина, выделяют напряжение первой промежуточной частоты, равной сумме частот ωпр1=ωс+ωГ1, усиливают его по мощности и излучают в эфир на частоте ω1=ωпр=ωГ2.
Принимаемый сложный сигнал с фазовой манипуляцией на частоте ω1 на пункте управления воздушным движением. На последнем формируют гармоническое колебание несущей частоты ωс, манипулируют его по фазе модулирующим кодом, отображающим команды на реконфигурацию бортовой аппаратуры летательного аппарата. Принимают сложный сигнал с фазовой манипуляцией на частоте ω2 на борту летательного аппарата. Выделяют низкочастотное напряжение, пропорциональное модулирующему коду, и используют его для реконфигурации бортовой аппаратуры летательного аппарата. Частоты ωГ1 и ωГ2 гетеродинов разнесены на величину второй промежуточной частоты ωГ2-ωГ1=ωпр2.
В приемниках, входящих в состав бортовой аппаратуры ЛА и аппаратуры, размещаемой на пунктах управления воздушным движением, одно и то же значение второй промежуточной частоты ωпр2 может быть получено в результате приема сигналов на следующих частотах ωс, ω2, ωз1 и ωз2, т.е.
Следовательно, если частоты настройки ω1 и ω2 принять за основные каналы приема, то наряду с ними будут иметь место зеркальные каналы приема, частоты ω1 и ω2 которых отличаются от частот ω1 и ω2 на 2ωпр2 и расположены симметрично (зеркально) относительно частот гетеродинов ωГ1 и ωГ2 (фиг.4). Преобразование по зеркальным каналам приема происходит с тем же коэффициентом преобразования Кпр, что и по основным каналам приема. Поэтому они наиболее существенно влияют на избирательность и помехоустойчивость приемников.
Кроме зеркальных существуют и другие дополнительные (комбинационные) каналы приема. В общем виде любой комбинационный канал приема имеет место при выполнении условий:
где ωki - частота i-го комбинированного канала приема, m, n , i - целые положительные числа.
Наиболее вредные комбинационными каналами приема являются каналы, образующиеся при взаимодействии первой гармоники частоты сигнала с гармониками частот гетеродинов малого порядка (второй, третьей и т.д.), так как чувствительность приемников по этим каналам близка к чувствительности основных каналов. Так, четырем комбинационным каналам при m=1 и n=2 соответствуют частоты:

Наличие ложных сигналов (помех), принимаемых по зеркальным и комбинационным каналам, приводят к снижению помехоустойчивости и надежности дуплексной радиосвязи между пунктом управления воздушным движением и летательным аппаратом.
Технической задачей изобретения является повышение помехоустойчивости и надежности дуплексной радиосвязи между пунктом управления воздушным движением и летательным аппаратом путем подавления ложных сигналов (помех), принимаемых по зеркальным и комбинационным каналам.
Поставленная задача решается тем, что способ предотвращения несанкционированного использования летательных аппаратов, заключающийся, в соответствии с ближайшим аналогом, в том, что средствами пунктов управления воздушным движением определяют текущие координаты и параметры движения летательного аппарата, прогнозируют возможность нештатного изменения траектории его полета, формируют и передают на борт летательного аппарата команды на изменение параметров полета, при этом в процессе предполетной подготовки в бортовую навигационную систему летательного аппарата вводят детерминированные программные траекторные параметры с заложенной невозможностью из изменения, в процессе полета определение текущих координат и параметров движения летательного аппарата дополнительно производят собственными средствами летательного аппарата и средствами космического и воздушного наблюдения, информационно сопряженными с пунктами управления воздушным движением с постоянным определением указанными средствами рассогласования параметров текущей траектории летательного аппарата от детерминированной программной, по информации, размещенной в системе серверов баз обновляемых данных, информационно сопряженных с пунктами управления воздушным движением, об энергетическом потенциале летательного аппарата, о степени важности объектов, расположенных по траектории полета летательного аппарата и их взаимном положении в процессе полета, выявляют конфликтно-опасные летательные аппараты и отслеживают попытки несанкционированного использования выявленных конфликтно-опасных летательных аппаратов по информации об их недопустимом отклонении от детерминированной программной траектории или по тревожному сообщению с борта летательного аппарата, а при наступлении этого сообщения производят реконфигурацию бортовых систем или бортовой аппаратуры летательного аппарата по командам, сформированным бортовым корректирующим устройством, или по командам, сформированным и переданным на борт летательного аппарата указанными средствами наблюдения и пункты управления и снятие этой реконфигурации после уменьшения рассогласования до допустимой величины, при этом на борту летательного аппарата при его несанкционированном использовании формируют гармоническое колебание несущей частоты ωc, манипулируют его по фазе псевдослучайной последовательностью, которая является идентификационным номером летательного аппарата, сформированный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием частоты ωГ1, первого гетеродина, выделяют напряжение первой промежуточной частоты, равной сумме частот ωпр1=ωс+ωГ1, усиливают его по мощности и излучают в эфир на частоте ω1=ωпр1=ωГ1, принимают сложный сигнал с фазовой манипуляцией на частоте ω1 на пункте управления воздушным движением, усиливают его по мощности, преобразуют по частоте с использованием частоты ωГ1 второго гетеродина, выделяют напряжение второй промежуточной частоты, равной разности частот ωпp2=ω1-ωГ1, выделяют низкочастотное напряжение, пропорциональное идентифицированному номеру летательного аппарата, регистрируют и анализируют его, на пункте управления воздушным движением формируют гармоническое колебание несущей частоты ωс, манипулируют его по фазе модулирующим кодом, отображающим команды на реконфигурацию бортовой аппаратуры летательного аппарата, преобразуют его по частоте с использованием частоты ωг2, первого гетеродина, выделяют напряжение третьей промежуточной частоты, равной разности частот ωпр3=ωг2-ωс, усиливают его по мощности и излучают в эфир на частоте ω2=ωпр3=ωг1, принимают сложный сигнал с фазовой манипуляцией на частоте ω2 на борту летательного аппарата, усиливают его по мощности, преобразуют по частоте с использованием частоты ωг2 второго гетеродина, выделяют первое напряжение второй промежуточной частоты, равной разности частот ωпр2=ωг2-ω2, выделяют низкочастотное напряжение, пропорциональное модулирующему коду, и используют его для реконфигурации бортовой аппаратуры летательного аппарата, причем частоты ωг1 и ωг2 гетеродинов разносят на величину второй промежуточной частоты ωг2-ωг1=ωпр2, на борту летательного аппарата сложные сигналы с фазовой манипуляцией излучают на частоте ω1 а принимают - на частоте ω2, а на пункте управления воздушным движением, наоборот, сложные сигналы с фазовой манипуляцией излучают на частоте ω2, а принимают - на частоте ω1, отличается от ближайшего аналога тем, что на борту летательного аппарата напряжение второго гетеродина сдвигают по фазе на -90°, используют его для повторного преобразования по частоте принимаемого сложного сигнала с фазовой манипуляцией на частоте ω2, выделяют второе напряжение второй промежуточной частоты, равной разности частот ωпр2=ωГ2-ω2, сдвигают его по фазе на +90°, суммируют с первым напряжением второй промежуточной частоты, перемножают первое суммарное напряжение с принимаемым сложным сигналом, выделяют гармоническое напряжение с частотой ωГ2, детектируют его, используют продетектированное напряжение для разрешения синхронного детектирования первого суммарного напряжения с использованием гармонического колебания несущей частоты ωс в качестве опорного напряжения, на пункте управления воздушным движением напряжение второго гетеродина сдвигают по фазе на +90°, используют его для повторного преобразования по частоте принимаемого сигнала с фазовой манипуляцией на частоте ω2, выделяют четвертое напряжение второй промежуточной частоты, равной разности частот ωпp2=ω1-ωГ1, сдвигают его по фазе на +90°, суммируют с третьим напряжением второй промежуточной частоты, перемножают второе суммарное напряжение с принимаемым сложным сигналом, выделяют гармоническое напряжение с частотой ωГ1, детектируют его, используют продетектированное напряжение для разрешения синхронного детектирования второго суммарного напряжения с использованием гармонического колебания несущей частоты ωс в качестве опорного напряжения.
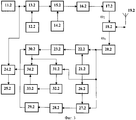
Техническая сущность способа поясняется фиг.1 на примере перелета пилотируемого ЛА (например, пассажирский дальнемагистральный самолет) из одного пункта в другой. Структурная схема бортовой аппаратуры ЛА представлена на фиг.2. Структурная схема аппаратуры, размещаемой на пункте управления воздушным движением, представлена на фиг.3. Частотная диаграмма, поясняющая преобразование сигналов по частоте, представлена на фиг.4.
Бортовая аппаратура ЛА и аппаратура, размещаемая на пункте управления воздушным движением, содержит последовательно включенные задающий генератор 11.1 (11.2), фазовый манипулятор 13.1 (13.2), второй вход которого соединен с выходом генератора 12.1 псевдослучайной последовательности (ПСП) (генератора 12.2 модулирующего кода), первый смеситель 15.1 (15.2), второй вход которого соединен с выходом первого гетеродина 14.1 (14.2), усилитель 16.1 первой промежуточной (16.2 третьей промежуточной) частоты, первый усилитель 17.1 (17.2) мощности, дуплексер 18.1 (18.2), вход-выход которого связан с приемопередающей антенной 19.1 (19.2), второй усилитель 20.1 (20.2) мощности, второй смеситель 22.1 (22.2), второй вход которого соединен с выходом второго гетеродина 21. (21.2), первый усилитель 23.1 (третий усилитель 23.2) второй промежуточной частоты, сумматор 30.1 (30.2), перемножитель 31.1 (31.2), второй вход которого соединен с выходом второго усилителя 20.1 (20.2) мощности, узкополосный фильтр 32.1 (32.2), амплитудный детектор 33.1 (33.2), ключ 34.1 (34.2), второй вход которого соединен с выходом сумматора 30.1 (30.2), фазовый детектор 24.1 (24.2), второй вход которого соединен с выходом задающего генератора 11.1 (11.2), и блок 25.1 реконфигурации бортовой аппаратуры (блок 25.2 регистрации).
Предлагаемый способ реализуется следующим образом.
Экипаж самолета 1, находящегося в аэропорту 2 (показана только взлетная полоса) с разрешения пункта 3 управления воздушным движением, обслуживающим данный аэропорт, готовится к перелету в аэропорт 4, который обслуживается пунктом 5 управления воздушным движением. Вдоль трассы полета могут находиться несколько таких пунктов, информационно взаимоувязанных друг с другом и с бортом сопровождаемого ими самолета в процессе его полета.
В процессе предполетной подготовки в вычислители бортовых навигационных систем вводят блоки памяти с размещенными в них детерминированными программными траекторными параметрами с заложенной невозможностью их изменения.
Следовательно, экипаж в процессе полета не имеет возможности каким-либо образом изменить заложенные траекторные параметры. Их изменение возможно только по инициативе пункта управления воздушным движением, в зоне управления которого в данный момент находится самолет (например, по радиоканалу), в случае обхода грозы, невозможности посадки в аэропорту пребывания по метеоусловиям, появления технических неисправностей. Такие же детерминированные траекторные параметры размещены в памяти вычислительных систем всех пунктов управления воздушным движением, размещенных в радиусе досягаемости ЛА данного типа. В общем случае в них же размещены детерминированные траекторные параметры всех ЛА, пребывающих в зоне видимости устойчивого информационного обмена в соответствии с расписанием и маршрутизацией полетов. Траекторные параметры, включая участки послевзлетных разворотов и маневрирования перед посадкой, могут задаваться в различной форме, например, совокупностью пар H(L), ψ(L) (текущая высота и ортодромный курс по дальности L), текущими координатами текущими X, Y, Z по дальности L или времени t в связанной с землей системой координат или в другой форме.
После взлета самолета и начала его полета по детерминированной программной траектории средствами пунктов управления воздушным движением определяют текущие координаты и параметры движения ЛА и прогнозируют возможность нештатного изменения траектории полета по рассогласованию параметров текущей траектории ЛА от детерминированной программной на величину, более чем заранее заданная. При этом допускаемая величина рассогласования может быть переменной на различных участках траектории: на участке захода на посадку она должна быть меньше. В процессе полета определение текущих координат и параметров движения ЛА, а также выявление рассогласования между текущими и детерминированными программными траекторными параметрами дополнительно производятся его собственными бортовыми средствами и средствами космического (например, спутник разведки) и воздушного наблюдения (например, самолет типа «Авакс»).
К собственным средствам определения текущих координат относится инерциальная навигационная система (ИНС) или аппаратура спутниковой навигационной системы. Предполагается также, что вычислительные системы средств воздушного и космического наблюдения тоже содержат детерминированные программные траекторные параметры ЛА, находящихся в зонах их видимости и устойчивого информационного обмена.
Как в зоне полета, так и в зоне досягаемой дальности ЛА, обладающего значительным энергетическим потенциалом (сотни тонн общей массы, десятки тонн топлива, большая скорость полета), расположено большое количество объектов различной степени важности, включая и объекты особой важности (объекты атомной и гидроэнергетики, учреждения государственной власти, пусковые установки с ядерными зарядами, склады и предприятия особо токсичной продукции, пункты управления, места проведения массовых мероприятий, крупные объекты на водной поверхности и др.), разрушение или уничтожение которых чревато необратимыми катастрофическими последствиями. Координаты этих объектов размещаются в серверах баз данных 6.
На борту ЛА 1, осуществляющего полет по траектории 8 с заданными детерминированными траекторными параметрами может произойти нештатная ситуация, следствием которой может стать появление сигнала о рассогласовании между текущими и детерминированными программными траекторными параметрами на величину, более чем заранее допустимую, что будет обнаружено бортовыми средствами ЛА, средствами пункта управления воздушным движением и средствами воздушного и космического наблюдения. Предположим, что это происходит в точке 9 траектории 8, и ЛА, перейдя на ручное управление, произвел несанкционированный разворот и по траектории 10 продолжил полет в направлении объекта особой важности 7. Появление отмеченного выше сигнала при отсутствии причины технического характера (например, по оперативному анализу телеметрируемых параметров) идентификация как попытка несанкционированного использования выявленного конфликтно-опасного ЛА (например, при захвате управления ЛА террористами). Эта попытка может быть идентифицирована также по тревожному сообщению экипажа ЛА до начала его несанкционированного разворота или в процессе взлета. При этом включается задающий генератор 11.1, который формирует высокочастотное колебание
uc1(t)=Uc1cos(ωct+φc), 0≤t≤Tc1
где Uc1, ωc, φc, Тc1 - амплитуда, несущая частота, начальная фаза и длительность
высокочастотного колебания,
которое поступает на первый вход фазового манипулятора 13.1. На второй вход фазового манипулятора 13.1 подается псевдослучайная последовательность (ПСП) с выхода генератора 12.1 ПСП, которая является идентификационным номером ЛА. На выходе фазового манипулятора 13.1 образуется сложный сигнал с фазовой манипуляцией (ФМн)
u1(t)=UГ1cos[ωct+φk1(t)+φc1], 0≤t≤Tc1,
где φk1(t)={0,π} - манипулированная составляющая фазы, отображающая закон фазовой манипуляции в соответствии с идентификационным номером ЛА,
который поступает на первый вход первого смесителя 15.1, на второй вход которого подается напряжение первого гетеродина 14.1
UГ1(t)=UГ1cos(ωГ1t+φГ1).
На выходе смесителя 15.1 образуется напряжение комбинационных частот. Усилителем 16.1 выделяется напряжение первой промежуточной частоты
uпр1(t)=Uпр1cos[ωпр1t+φk1(t)+φпр1],
где 
ωпр1=ωс+ωГ1=ω1 - первая промежуточная (суммарная) частота (фиг.4);
φпр1=φГ1+φc;
которое после усиления в усилителе 17,1 мощности через дуплексер 18.1 поступает в приемопередающую антенну 19.1, излучается ею в эфир, улавливается приемопередающей антенной 19.2 пункта управления воздушным движением и через дуплексер 18.2 и усилитель 20.2 мощности поступает на первые входы смесителей 22.2 и 27.2, на вторые входы которых подаются напряжения гетеродина 21.2
uг1(t)=UГ1cos(ωГ1t+φГ1),
uГ1(t)=UГ1cos(ωГ1t+φГ1+90°).
На выходе смесителей 22.2 и 27.2 образуются напряжения комбинационных частот. Усилителями 23.2 и 28.2 выделяются напряжения второй промежуточной (разностной) частоты:
uпр2(t)=Uпр2cos[ωпр2t+φk1(t)+φпр2],
uпр3(t)=Uпр2cos[ωпр2t+φk1(t)+φпр2-90°],
где 
ωпр2=ωпр1-ωГ1 - вторая промежуточная (разностная) частота;
φпр2=φпр1-φГ1.
Напряжение uпр3(t) с выхода усилителя 28.2 второй промежуточной частоты поступает на вход фазовращателя на 29.2 на 90°, на выходе которого образуется напряжение
uпp4(t)=Uпp2сos[ωпр2t+φk1(t)+φпр2-90°+90°]=Uпр2cos[ωпр2t+φk1(t)+φпр2].
Напряжения uпр2(t) и uпр4(t) поступают на два входа сумматора 30.2, на выходе которого образуется второе суммарное напряжение u∑2(t)=U∑2cos[ωпр2t+φk1(t)+φпр2], 0≤t≤Tc1
где U∑2=2Uпр2;
которое поступает на второй вход перемножителя 31.2. На первый вход последнего подается принимаемый сигнал uпр1(t) с выхода усилителя 20.2 мощности. На выходе перемножителя 31.2 образуется гармоническое напряжение
u2(t)=U2cos(ωГ1t+φГ1),
где 
которое выделяется узкополосным фильтром 32.2, детектируется амплитудным детектором 33.2 и подается на управляющий вход ключа 34.2, открывая его. В исходном состоянии ключ 34.2 всегда закрыт.
Частота настройки ωн1 узкополосного фильтра 32.2 выбирается следующим образом: ωн1=ωГ2. При этом суммарное напряжение u∑2(t) с выхода сумматора 30.2 через открытый ключ 34.2 подается на первый (информационный) вход фазового детектора 24.2. На второй (опорный) вход фазового детектора 24.2 подается напряжение
uc2(t)=Uc2cos(ωct+φc), 0≤t≤Tc2,
с выхода задающего генератора 11.2. В результате синхронного детектирования на выходе фазового детектора 24.2 образуется низкочастотное напряжение
uн1(t)=Uн1cosφk1(t),
где 
которое фиксируется блоком 25.2 регистрации.
По зафиксированному низкочастотному напряжению определяется идентификационный номер ЛА, захваченного террористами, и его местоположение. При этом высокочастотное колебание uc2(t) с выхода задающего генератора 11.2 поступает на первый вход фазового манипулятора 13.2, на второй вход которого подается модулирующий код M(t) с выхода генератора 12.2. На выходе фазового манипулятора 13.2 образуется сложный ФМн-сигнал
u2(t)=Uc2cos[ωct+φk2(t)+φc], 0≤t≤Tc2,
где φk2(t)={0,π} - манипулируемая составляющая фазовой манипуляции в соответствии с модулирующим кодом M(t);
который поступает на первый вход смесителя 15.2, на второй вход которого подается напряжение гетеродина 14.2
uг2(t)=Uг2cos(ωг2t+φг2).
На выходе смесителя 15.2 образуются напряжения комбинационных частот. Усилителем 16.2 выделяется напряжение третьей промежуточной частоты
uпр3(t)=Uпр3cos[ωпр3t-φk2(t)+φпр3], 0≤t≤Tc2
где 
ωпр3=ωu2-ωс - третья промежуточная частота;
φпр3=φг2-φс,
которое после усиления в усилителе 17.2 мощности через дуплексер 18.2 поступает в приемопередающую антенну 19.2, излучается ею в эфир на частоте ω2, улавливаются приемопередающей антенной 19.1 летательного аппарата и через дуплексер 18.1 и усилитель 20.1 мощности поступает на первые входы смесителей 22.1 и 27.1, на вторые входы которых подаются напряжения гетеродина 21.1:
uГ2(t)=UГ2cos(ωГ2t+φГ2),
На выходе смесителей 22.1 и 27.1 образуются напряжения комбинационных частот. Усилителями 23.1 и 28.1 выделяются напряжения второй промежуточной (разностной) частоты:
uпр5(t)=Uпр5cos[ωпр2t+φk2(t)+φпр5],
uпр6(t)=Uпр5cos[ωпр2t+φk2(t)+φпр5-90°],
где 
ωпр2=ωГ2-ωпр3 - вторая промежуточная (разностная) частота;
φпр5=φГ2-φпр3.
Напряжение uпр6(t) с выхода усилителя 28.1 второй промежуточной частоты поступает на вход фазовращателя 29.1 на -90°, на выходе которого образуется напряжение
uпр7(t)=Uпр5cos[ωпр2t+φk2(t)+φпр5-90°+90°]=Uпр5cos[ωпр2t+φk2(t)+φпр5].
Напряжения uпр5(t) и uпр7(t) поступают на два входа сумматора 30.1, на выходе которого образуется первое суммарное напряжение
u∑1(t)=U∑cos[ωпр2t+φk2(t)+φпр6], 0≤t≤Tc,
где U∑1=2Uпр5,
которое поступает на второй вход перемножителя 31.1. На первый вход последнего подается принимаемый сигнал uпр3(t) с выхода усилителя 20.1 мощности. На выходе перемножителя 31.1 образуется гармоническое напряжение
u3(t)=U3cos(ωГ2t+φГ2),
где 
которое выделяется узкополосным фильтром 32.1, детектируется амплитудным детектором 33.1 и подается на управляющий вход ключа 34.1, открывая его. В исходном состоянии ключ 34.1 всегда закрыт. Частота настройки ωН2 узкополосного фильтра 32.1 выбирается следующим образом: ωH2=ωГ2. При этом суммарное напряжение u∑1(t) с выхода сумматора 30.1 через открытый ключ 34.1 поступает на первый (информационный) вход фазового детектора 24.1. На второй (опорный) вход фазового детектора 24.1 подается напряжение uс1(t) с выхода задающего генератора 11.1.
В результате синхронного детектирования на выходе фазового детектора 24.1 образуется низкочастотное напряжение
uн2(t)=Uн2cosφk2(t),
где 
которое поступает в блок 25.1 реконфигурации бортовой аппаратуры.
Блок 25.1 может выполнять следующие виды реконфигурации бортовой аппаратуры ЛА:
- введение блокировки гидромеханической части системы штурвального управления;
- отключение системы распознавания «свой-чужой». Этим достигается выделение конфликтно-опасного ЛА в воздушном пространстве среди большого количества других ЛА с целью упорядоченной концентрации на нем внимания пунктов управления воздушным движением, средств ПВО и истребительной авиации;
- включение блока колебательности в автомате стабилизации, что приведет к раскачиванию ЛА по всем осям до границы его неустойчивости, затруднению пилотирования ЛА и наведению его на объект;
- включение блоков искажения в системах построения курса, тангажа, например, циклическим суммированием с переменной по величине и времени установкой. Это обстоятельство приведет к потере ориентировки в пространстве и усложнит поиск объекта нанесения таранного удара;
- включение блока искажения в системах измерения высоты и скорости, что затрудняет пилотирование ЛА;
- включение блока искажения в системе отображения полетной информации на приборной доске пилотов (углы атаки и скольжения, обороты двигателей и др.), например «мерцанием» показаний;
- принудительное включение системы аварийной сигнализации о нештатном функционировании всех жизненно важных систем ЛА. Это обстоятельство повлечет стрессовое состояние экипажа с потерей глубины логических действий с возможным последующим отказом от несанкционированных действий;
- отключение одного или группы двигателей, а также включение системы аварийного слива топлива, что затрудняет пилотирование ЛА и уменьшает его досягаемую дальность полета;
- включение блока отрицательного мультимедиа воздействия (звуковое сопровождение на частотах, неблагоприятно воздействующих на слуховой аппарат, а также выведение на бортовой дисплей изображений, неприятных для ощущений террористам). Это обстоятельство повлечет стрессовое состояние экипажа с потерей полноты логических действий;
- включение блока выдачи рекомендаций экипажу, например включение изображения главы террористической организации, приказывающего прекратить несанкционированные действия;
- включение блока перевода управления в режим дистанционного пилотирования (например, на самолет сопровождения или пункт управления воздушным движением);
- включение систем придания непрозрачности остеклению кабины путем поляризации остекления, внутреннего или внешнего его забрызгивания, а также принудительное ослепление экипажа. Особенно эффективно это действие на начальной стадии взлета, когда несанкционированное использование ЛА может быть исключено в принципе;
- принудительную механическую фиксацию частей тела экипажа, что может затруднить ручное пилотирование ЛА или исключить переход на ручное управление перетягиванием штурвала;
- включение блока принудительного сваливания в штопор, например, путем одновременного формирования сигналов на реверс или отключение двигателей, но рули высоты (для увеличения угла атаки), крена и курса. Это действие является одним из последних, когда обнаружиться неизбежность столкновения ЛА с объектом особой ценности при исчерпании всех других, но подобная операция выполняется по команде с пункта управления воздушным движением по принятию соответствующего решения при лимите времени на задействование средств ПВО и истребительной авиации.
Последовательность выдачи команд на виды реконфигурации бортовых систем или бортовой аппаратуры определяется мерой усиления эффекта их последствия. Причем эта последовательность команд может формироваться на средствах наземного базирования, на пунктах управления воздушным движением, а также на борту самого ЛА, подвергнутого попытке несанкционированного использования (кроме команды на принудительное сваливание в штопор).
Следовательно, на борту ЛА размещен блок 25.1 реконфигурации, информационно сопряженный с элементами бортовой аппаратуры и бортовых систем, формирующий последовательность команд при появлении недопустимого рассогласования между текущими и детерминированными траекторными параметрами. При этом следует отметить, что при уменьшении рассогласования до допустимой величины (что можно трактовать как отказ экипажа от несанкционированных действий) ранее выданные команды на реконфигурацию бортовой аппаратуры и бортовых систем снимаются.
Описанная выше работа устройства, реализующего предлагаемый способ, соответствует случаю приема полезных ФМн-сигналов по основному каналу на частотах ω1 и ω2.
Если ложный сигнал (помеха) поступает по первому зеркальному каналу на частоте ωЗ1
uЗ1(t)=UЗ1cos(ωЗ1t+φЗ1), 0≤t≤TЗ1,
то усилителями 23.2 и 28.2 второй промежуточной частоты выделяются следующие напряжения:
uпр8(t)=Uпр8cos(ωпр2t+φпр8),
uпр9(t)=Uпр8cos(ωпр2t+φпр8+90°), 0≤t≤TЗ1
где 
ωпр2=ωГ1-ωЗ1 - вторая промежуточная (разностная) частота,
φпр8=φГ1-φЗ1.
Напряжение Uпр9(t) с выхода усилителя 28.1 второй промежуточной частоты поступают на вход фазовращателя 29.2 на +90°, на выходе которого формируется напряжение
Uпр10(t)=Uпр8cos(ωпр2t+φпр8+90°+90°)=-Uпр8cos(ωпр2t+φпр8).
Напряжения uпр8(t) и uпр10(t) поступают на два входа сумматора 30.3, на его выходе компенсируются.
Следовательно, ложный сигнал (помеха), принимаемый по первому зеркальному каналу на частоте ωЗ1, подавляется внешним кольцом, состоящим из гетеродина 21.2, фазовращателей 26.2 и 29.2 на +90°, смесителей 22.2 и 27.2, усилителей 23.2 и 28.2 второй промежуточной частоты, сумматора 30.2 и реализующим фазокомпенсационный метод.
Если ложный сигнал (помеха) поступает по второму зеркальному каналу на частоте ωЗ2
uЗ2(t)=UЗ2cos(ωЗ2t+φP2), 0≤t≤TЗ2,
то усилителями23.1 и 28.1 второй промежуточной частоты выделяются следующие напряжения:
uпр11(t)=Uпр11cos(ωпр2t+φпр11),
uпр12(t)=Uпр11cos(ωпр2t+φпр11+90°),
где 
ωпр2=ωЗ2-ωЗ2 - вторая промежуточная (разностная) частота,
φпр11=φЗ2-φЗ2.
Напряжение Uпр12(t) с выхода усилителя 28.1 второй промежуточной частоты поступает на вход фазовращателя 29.1 на +90°, на выходе которого формируется напряжение
uпр13(t)=Uпр11cos(ωпр2t+φпр11+90°+90°)=-Uпр11cos(ωпр2t+φпр11).
Напряжения uпр11(t) и uпр13(t), поступающие на два входа сумматора 30.1, на его выходе компенсируются.
Следовательно, ложный сигнал (помеха), принимаемый по второму зеркальному каналу на частоте ωЗ2, подавляется внешним кольцом, состоящим из гетеродина 21.1, фазовращателя 26.1 на -90°, фазовращателя 29.1 на -90°, смесителей 22.1 и 27.1, усилителей 23.1 и 28.1 второй промежуточной частоты, сумматора 30.1 и реализующим фазокомпенсационный метод.
По аналогичной причине подавляются и ложные сигналы (помехи), принимаемые по первому ωк1 и четвертому ωк4 комбинационным каналам.
Если ложный сигнал (помеха) принимается по второму комбинационному каналу на частоте ωк2
uK2(t)=UK2cos(ωK2t+φK2), 0≤t≤TK2,
то усилителями 23.2 и 28.2 второй промежуточной частоты выделяются следующие напряжения:
uпр14(t)=Uпр14cos(ωпр2t+φпр14),
uпр15(t)=Uпр14cos(ωпр2t+φпр14-90°),
где 
ωпр2=ωК2-2ωГ1 - вторая промежуточная (разностная)частота,
φпр14=φК2-φГ1.
Напряжение uпр15(t) с выхода усилителя 28.2 второй промежуточной частоты поступает на вход фазовращателя 29.2 на +90°, на выходе которого формируется напряжение
uпр16(t)-Uпр14cos(ωпр2t+φпр14-90°+90°)=Uпр14cos(ωпр2t+φпр14).
Напряжения uпр14(t) и uпр16(t) поступают на два входа сумматора 30.1, на выходе которого образуется суммарное напряжение
u∑3(t)=U∑3cos(ωпр2t+φпр14), 0≤t≤Tk2,
где U∑3=2Uпр14,
которое поступает на второй вход перемножителя 31.2. На первый вход последнего подается принимаемый ложный сигнал (помеха) uk2(t) с выхода усилителя 20.2 мощности. На выходе перемножителя 31.2 образуется гармоническое напряжение
u4(t)=U4cos(2ωГ1t+φГ1), 0≤t≤Tk2,
где 
которое попадает в полосу пропускания узкополосного фильтра 32.2. Ключ 34.2 не открывается и ложный сигнал (помеха), принимаемый по второму комбинационному каналу на частоте ωк2, подавляется. Для этого используется «внутреннее кольцо», состоящее из перемножителя 31.2, узкополосного фильтра 32.2, амплитудного детектора 33.2, ключа 34.2 и реализующее метод узкополосной фильтрации.
Если ложный сигнал (помеха) поступает по третьему комбинационному каналу на частоте ωк2
uk3(t)=Uk3cos(ωk3t+φk3), 0≤t≤Tk3,
То усилителями 23.1 и 28.1 второй промежуточной частоты выделяются следующие напряжения:
uпр17(t)=Uпр17cos(ωпр2t+φпр17),
uпр18(t)=Uпр17cos(ωпр2t+φпр17-90°),
где 
ωпр2=2ωГ2-ωк3 - вторая промежуточная (разностная) частота,
φпр2=φГ2-φк3.
Напряжение uпр18(t) с выхода усилителя 28.1 второй промежуточной частоты поступает на вход фазовращателя 29.1 на +90°, на выходе которого формируется напряжение
uпр19(t)-Uпр17cos(ωпр2t+φпр17-90°+90°)=Uпр17cos(ωпр2t+φgh17).
Напряжения uпр17(t) и uпр19(t) поступают на два входа сумматора 30.1, на выходе которого образуется суммарное напряжение
u∑4(t)=U∑4cos(ωпр2t+φпр17), 0≤t≤Tk3,
где U∑4=2Uпр17,
которое поступает на второй вход перемножителя 31.1. На первый вход последнего подается принимаемый ложный сигнал (помеха) uk3(t) с выхода усилителя 20.1 мощности. На выходе перемножителя 31.1 образуется гармоническое напряжение
u5(t)=U5cos(2ωГ2t+φГ2), 0≤t≤Tk3,
где 
которое не попадает в полосу пропускания узкополосного фильтра 32.1. Ключ 34.1 не открывается и ложный сигнал (помеха), принимаемый по третьему комбинационному каналу на частоте ωк3, подавляется. Для этого используется «внутреннее кольцо», состоящее из перемножителя 31.1, узкополосного фильтра 32.1, амплитудного детектора 33.1, ключа 34.1 и реализующее метод узкополосной фильтрации.
Предлагаемый способ обеспечивает повышение надежности дуплексной радиосвязи между пунктами управления воздушным движением и летательными аппаратами. Это достигается использованием сложных сигналов с фазовой манипуляцией и двух частот ω1 и ω2. Причем на борту ЛА передачу сложных ФМн-сигналов осуществляют на частоте ω1, а прием - на частоте ω2. А на пункте управления воздушным движением, наоборот, передачу сложных ФМн-сигналов ведут на частоте ω2, а прием - на частоте ω2. Частоты ω1 и ω2 разнесены на значение второй промежуточной частоты: ωг2-ωг1=ωпр2.
Сложные ФМн-сигналы с точки зрения обнаружения обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени и по спектру, при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн-сигнал в точке приема может оказаться замаскированным шумами и помехами.
Причем энергия сложного ФМн-сигнала отнюдь не мала, она просто равномерно распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемников.
Применение данного способа с использованием дуплексной радиосвязи на двух частотах с применением сложных ФМн-сигналов позволяет предотвратить преднамеренное нанесение непоправимого ущерба особо важным объектам таранным ударом по ним ЛА, принудительно захваченным террористами, путем создания на борту условий, препятствующих изменению заданной траектории полета ЛА, затрудняющих пилотирование ЛА, исключая возможности прицельного наведения ЛА на выбранный объект, уменьшения его досягаемой дальности полета, а также создания психологического дискомфорта при его пилотировании и уменьшения при исчерпании всех других операций, когда обнаружиться неизбежность столкновения ЛА с объектом особой ценности.
Таким образом, предлагаемый способ по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение помехоустойчивости и надежности дуплексной радиосвязи между пунктом управления воздушным движением и летательным аппаратом. Это достигается подавлением ложных сигналов (помех), принимаемых по зеркальным и комбинационным каналам. Причем, для подавления ложных сигналов (помех), принимаемых по первому ωЗ1 и второму ωЗ1 зеркальным каналам, по первому ωк1 и четвертому ωк4 комбинационным каналам используется фазокомпенсационный метод, а для подавления ложных сигналов (помех), принимаемых по второму ωк2 и третьему ωк3 комбинационным каналам, используется метод узкополосной фильтрации.
Claims (1)
- Способ предотвращения несанкционированного использования летательных аппаратов, заключающийся в том, что средствами пунктов управления воздушным движением определяют текущие координаты и параметры движения летательного аппарата, прогнозируют возможность нештатного изменения траектории его полета, формируют и передают на борт летательного аппарата команды на изменение параметров полета, при этом в процессе предполетной подготовки в бортовую навигационную систему летательного аппарата вводят детерминированные программные траекторные параметры с заложенной невозможностью их изменения, в процессе полета определение текущих координат и параметров движения летательного аппарата дополнительно производят собственными средствами летательного аппарата и средствами космического и воздушного наблюдения, информационно сопряженными с пунктами управления воздушным движением с постоянным определением указанными средствами рассогласования параметров текущей траектории летательного аппарата от детерминированной программной, по информации, размещенной в системе серверов баз обновляемых данных, информационно сопряженных с пунктами управления воздушным движением, об энергетическом потенциале летательного аппарата, о степени важности объектов, расположенных на траектории полета летательного аппарата, и их возможном положении в процессе полета, выявляют конфликтно-опасные летательные аппараты и отслеживают попытки несанкционированного использования выявленных конфликтно-опасных летательных аппаратов по информации об их недопустимом отклонении от детерминированной программной траектории или по тревожному сообщению с борта летательного аппарата, а при поступлении этого сообщения производят реконфигурацию бортовых систем или бортовой аппаратуры летательного аппарата по командам, сформированным бортовым корректирующим устройством, или по командам, сформированным и переданным на борт летательного аппарата указанными средствами наблюдения и пункта управления и снятие этой реконфигурации после уменьшения рассогласования до допустимой величины, при этом на борту летательного аппарата при его несанкционированном использовании формируют гармоническое колебание несущей частоты ωс, манипулируют его по фазе псевдослучайной последовательностью, которая является идентификационным номером летательного аппарата, сформированный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием частоты ωг1 первого гетеродина, выделяют напряжение первой промежуточной частоты, равной сумме частот ωпр1=ωс+ωг1, усиливают его по мощности и излучают в эфир на частоте ω1=ωпр1=ωг2, принимают сложный сигнал с фазовой манипуляцией на частоте ω1 на пункте управления воздушным движением, усиливают его по мощности, преобразуют по частоте с использованием частоты ωг1 второго гетеродина, выделяют напряжение второй промежуточной частоты, равной разности частот ωпр2=ω1-ωг1, выделяют низкочастотное напряжение, пропорциональное ω идентификационному номеру летательного аппарата, регистрируют и анализируют его, на пункте управления воздушным движением формируют гармоническое колебание несущей частоты ωс, манипулируют его по фазе модулирующим кодом, отображающим команды на реконфигурацию бортовой аппаратуры летательного аппарата, преобразуют по частоте с использованием частоты ωг2 первого гетеродина, выделяют напряжение третьей промежуточной частоты, равной разности частот ωпр3=ωг2-ωс, усиливают его по мощности и излучают в эфир на частоте ω2=ωпр3=ωг1, принимают сложный сигнал с фазовой манипуляцией на частоте ω2 на борту летательного аппарата, усиливают его по мощности, преобразуют по частоте с использованием частоты ωг2 второго гетеродина, выделяют напряжение второй промежуточной частоты, равной разности частот ωпр2=ωг2-ω2, выделяют низкочастотное напряжение, пропорциональное модулирующему коду, и используют его для реконфигурации бортовой аппаратуры летательного аппарата, причем частоты ωг1 и ωг2 гетеродинов разносят на величину второй промежуточной частоты ωг2-ωг1=ωпр2, на борту летательного аппарата сложные сигналы с фазовой манипуляцией излучают на частоте ω1, а принимают - на частоте ω2, а на пункте управления воздушным движением, наоборот, сложные сигналы с фазовой манипуляцией излучают на частоте ω2, а принимают - на частоте ω1, отличающийся тем, что на борту летательного аппарата напряжение второго гетеродина сдвигают по фазе на -90°, используют его для повторного преобразования по частоте принимаемого сложного сигнала с фазовой манипуляцией на частоте ω2, выделяют второе напряжение второй промежуточной частоты, равной разности частот ωпр2=ωГ2-ω2, сдвигают его по фазе на +90°, суммируют с первым напряжением второй промежуточной частоты, перемножают первое суммарное напряжение с принимаемым сложным сигналом, выделяют гармоническое напряжение с частотой ωГ2, детектируют его, используют продетектированное напряжение для разрешения синхронного детектирования первого суммарного напряжения с использованием гармонического колебания несущей частоты ωс в качестве опорного напряжения, на пункте управления воздушным движением напряжение второго гетеродина сдвигают по фазе на +90°, используют его для повторного преобразования по частоте принимаемого сложного сигнала с фазовой манипуляцией на частоте ω1, выделяют четвертое напряжение второй промежуточной частоты, равной разности частот ωпр2=ω1-ωГ1, сдвигают его по фазе на +90°, суммируют с третьим напряжением второй промежуточной частоты, перемножают второе суммарное напряжение с принимаемым сложным сигналом, выделяют гармоническое напряжение с частотой ωГ1, детектируют его, используют продетектированное напряжение для разрешения синхронного детектирования второго суммарного напряжения с использованием гармонического колебания несущей частоты ωс в качестве опорного напряжения.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2012123805/11A RU2509373C2 (ru) | 2012-06-07 | 2012-06-07 | Способ предотвращения несанкционированного использования летательного аппарата |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2012123805/11A RU2509373C2 (ru) | 2012-06-07 | 2012-06-07 | Способ предотвращения несанкционированного использования летательного аппарата |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2012123805A RU2012123805A (ru) | 2013-12-20 |
| RU2509373C2 true RU2509373C2 (ru) | 2014-03-10 |
Family
ID=49784441
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2012123805/11A RU2509373C2 (ru) | 2012-06-07 | 2012-06-07 | Способ предотвращения несанкционированного использования летательного аппарата |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2509373C2 (ru) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2614016C2 (ru) * | 2015-08-13 | 2017-03-22 | Александр Валентинович Зверев | Устройство дистанционного мониторинга систем жизнеобеспечения сложных объектов |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5071087A (en) * | 1991-03-11 | 1991-12-10 | The United States Of America As Represented By The Secretary Of The Navy | Method of guiding an in-flight vehicle to a desired flight path |
| RU2228543C2 (ru) * | 2002-05-28 | 2004-05-10 | Федеральное унитарное государственное предприятие "Научно-производственное объединение машиностроения" | Способ предотвращения несанкционированного использования летательных аппаратов |
| US6799094B1 (en) * | 2002-09-03 | 2004-09-28 | Ridgeback Systems Llc | Aircraft location monitoring system and method of operation |
| US7120521B2 (en) * | 2003-01-31 | 2006-10-10 | Hal Dwayne Lilley | Anti hijacking fail-safe system with alert locator tracking capabilities |
| RU2446481C2 (ru) * | 2010-05-12 | 2012-03-27 | Вячеслав Адамович Заренков | Способ предотвращения несанкционированного использования летательных аппаратов |
-
2012
- 2012-06-07 RU RU2012123805/11A patent/RU2509373C2/ru not_active IP Right Cessation
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5071087A (en) * | 1991-03-11 | 1991-12-10 | The United States Of America As Represented By The Secretary Of The Navy | Method of guiding an in-flight vehicle to a desired flight path |
| RU2228543C2 (ru) * | 2002-05-28 | 2004-05-10 | Федеральное унитарное государственное предприятие "Научно-производственное объединение машиностроения" | Способ предотвращения несанкционированного использования летательных аппаратов |
| US6799094B1 (en) * | 2002-09-03 | 2004-09-28 | Ridgeback Systems Llc | Aircraft location monitoring system and method of operation |
| US7120521B2 (en) * | 2003-01-31 | 2006-10-10 | Hal Dwayne Lilley | Anti hijacking fail-safe system with alert locator tracking capabilities |
| RU2446481C2 (ru) * | 2010-05-12 | 2012-03-27 | Вячеслав Адамович Заренков | Способ предотвращения несанкционированного использования летательных аппаратов |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2614016C2 (ru) * | 2015-08-13 | 2017-03-22 | Александр Валентинович Зверев | Устройство дистанционного мониторинга систем жизнеобеспечения сложных объектов |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2012123805A (ru) | 2013-12-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Blasch et al. | Cyber awareness trends in avionics | |
| EP3887854B1 (en) | Suborbital space traffic control system with radar system and ads-b receiver | |
| Shaikh et al. | A review of recent advances and security challenges in emerging E-enabled aircraft systems | |
| Viveros | Analysis of the cyber attacks against ADS-B perspective of aviation experts | |
| Liu | Spacecraft TT & C and information transmission theory and technologies | |
| Sampigethaya et al. | Security and privacy of future aircraft wireless communications with offboard systems | |
| RU2509373C2 (ru) | Способ предотвращения несанкционированного использования летательного аппарата | |
| RU2446481C2 (ru) | Способ предотвращения несанкционированного использования летательных аппаратов | |
| Hlotov et al. | Analysis of application of the UAVs for military tasks | |
| RU2625206C1 (ru) | Способ доставки постановщиков помех и беспилотный робототехнический комплекс радиоэлектронной борьбы | |
| RU2714845C1 (ru) | Автоматический беспилотный диагностический комплекс | |
| Bratt et al. | Degraded visual environment paradigm shift from mission deterrent to combat enabler | |
| RU2464592C1 (ru) | Автоматический беспилотный диагностический комплекс | |
| Lam et al. | Cyberterrorists bringing down airplanes: Will it happen soon? | |
| Corcoran | Higher eyes in the sky: The feasibility of moving AWACS and JSTARS functions into space | |
| Wu et al. | Digital-enabled green ATM system: History, advance, challenges and future | |
| RU2349511C1 (ru) | Способ предотвращения террористического акта с использованием самолета и система предотвращения террористического акта с использованием самолета | |
| Kaiser et al. | Legal Protection of Civil and Military Aviation against Cyber Interference | |
| Piltyay et al. | Wireless telemetry and antenna system features in modern uav designs | |
| Guntharp | Topics in Radio Technology, Applications, Techniques and Countermeasures in WWII and Early Cold War | |
| RU2725100C1 (ru) | Экологический дирижабль | |
| RU2348552C1 (ru) | Система предотвращения несанкционированного передвижения летательного аппарата | |
| Bergmann | Electronic Warfare: Project peregrine-a further boost to RAAf's Electronic Warfare capability | |
| Henselmann et al. | Where Cyber Meets the Electromagnetic Spectrum | |
| Szymanski | Space Warfare Analysis Tools (SWAT) and Space Attack Warning (SAW) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20140608 |
|
| NF4A | Reinstatement of patent |
Effective date: 20150320 |
|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20200608 |