RU2507535C2 - Визуализация ультразвуковых изображений с расширенным полем обзора с помощью двумерного матричного зонда - Google Patents
Визуализация ультразвуковых изображений с расширенным полем обзора с помощью двумерного матричного зонда Download PDFInfo
- Publication number
- RU2507535C2 RU2507535C2 RU2010154468/28A RU2010154468A RU2507535C2 RU 2507535 C2 RU2507535 C2 RU 2507535C2 RU 2010154468/28 A RU2010154468/28 A RU 2010154468/28A RU 2010154468 A RU2010154468 A RU 2010154468A RU 2507535 C2 RU2507535 C2 RU 2507535C2
- Authority
- RU
- Russia
- Prior art keywords
- image
- probe
- plane
- efov
- dimensional
- Prior art date
Links
- 239000000523 sample Substances 0.000 title claims abstract description 129
- 238000003384 imaging method Methods 0.000 title abstract description 18
- 230000033001 locomotion Effects 0.000 claims abstract description 81
- 238000002059 diagnostic imaging Methods 0.000 claims abstract 9
- 239000011159 matrix material Substances 0.000 claims description 42
- 238000002604 ultrasonography Methods 0.000 claims description 33
- 238000006073 displacement reaction Methods 0.000 claims description 20
- 238000000034 method Methods 0.000 claims description 12
- 238000011156 evaluation Methods 0.000 claims 1
- 239000000126 substance Substances 0.000 abstract 1
- 238000011084 recovery Methods 0.000 description 13
- 210000004204 blood vessel Anatomy 0.000 description 12
- 238000010586 diagram Methods 0.000 description 8
- 239000013598 vector Substances 0.000 description 8
- 238000005516 engineering process Methods 0.000 description 7
- 238000012800 visualization Methods 0.000 description 7
- 238000005259 measurement Methods 0.000 description 6
- 238000013459 approach Methods 0.000 description 5
- 238000002592 echocardiography Methods 0.000 description 5
- 238000006243 chemical reaction Methods 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 230000000875 corresponding effect Effects 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 210000003484 anatomy Anatomy 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- PCABIJNYKYLBGI-XTKHTHDMSA-N O=N/C1=C/C2=CC(C34)C2=C3/C4=C\C=C1 Chemical compound O=N/C1=C/C2=CC(C34)C2=C3/C4=C\C=C1 PCABIJNYKYLBGI-XTKHTHDMSA-N 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000017531 blood circulation Effects 0.000 description 1
- 210000001715 carotid artery Anatomy 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 210000001105 femoral artery Anatomy 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000009877 rendering Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 230000005236 sound signal Effects 0.000 description 1
- 238000012285 ultrasound imaging Methods 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52053—Display arrangements
- G01S7/52057—Cathode ray tube displays
- G01S7/5206—Two-dimensional coordinated display of distance and direction; B-scan display
- G01S7/52065—Compound scan display, e.g. panoramic imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/483—Diagnostic techniques involving the acquisition of a 3D volume of data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8993—Three dimensional imaging systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4245—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/5205—Means for monitoring or calibrating
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52053—Display arrangements
- G01S7/52057—Cathode ray tube displays
- G01S7/52073—Production of cursor lines, markers or indicia by electronic means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52053—Display arrangements
- G01S7/52057—Cathode ray tube displays
- G01S7/52074—Composite displays, e.g. split-screen displays; Combination of multiple images or of images and alphanumeric tabular information
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Acoustics & Sound (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Biophysics (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
Использование: изобретение относится к медицинским диагностическим ультразвуковым системам и, в частности, к ультразвуковым системам, которые выполняют панорамную визуализацию или визуализацию с расширенным полем обзора (EFOV). Сущность: ультразвуковая система диагностической визуализации формирует изображение с расширенным полем обзора (EFOV). Зонд для трехмерной визуализации перемещается вдоль кожи пациента над частью тела, которая должна быть включена в EFOV-изображение. По мере того, как зонд перемещается, изображения получаются из двух различных ориентации плоскостей, таких как сагиттальная плоскость и поперечная плоскость. По мере того, как зонд перемещается, данные изображений последовательных плоскостей одной из ориентации сравниваются, чтобы оценивать движение зонда. Эти оценки движения используются для того, чтобы размещать последовательность изображений, полученных в одной из ориентации точно относительно друг друга в формате EFOV-отображения. Форматом отображения может быть двумерное EFOV-изображение или трехмерное EFOV-изображение. Технический результат: повышение точности при восстановлении EFOV-изображения. 2 н. и 13 з.п. ф-лы, 17 ил.
Description
Данное изобретение относится к медицинским диагностическим ультразвуковым системам и, в частности, к ультразвуковым системам, которые выполняют панорамную визуализацию или визуализацию с расширенным полем обзора (EFOV).
Двумерная визуализация ультразвуковых изображений с расширенным полем обзора (EFOV) или двумерная панорамная визуализация ультразвуковых изображений является полезным инструментальным средством для визуализации крупных или длинных структур (например, бедренной артерии, сонной артерии), которые не могут полностью просматриваться при традиционной визуализации ультразвуковых изображений. При двумерной панорамной визуализации большое число двумерных изображений получается посредством ручного перемещения зонда, имеющего матрицу одномерных ультразвуковых преобразователей, вдоль плоскости двумерного изображения (азимутального измерения), как описано в патенте (США) 6442289 (Olsson и др.). Полученные перекрывающиеся изображения комбинируются, чтобы формировать панорамное изображение посредством использования оценок движения зонда, которые типично измеряются посредством оценки регистрации между последовательными перекрывающимися изображениями. Сверхдлинные изображения могут преимущественно просматриваться на дисплее с широкоформатным соотношением сторон, как показано в патенте (США) 6516215 (Roundhill). Одно ограничение традиционной визуализации с расширенным полем обзора с использованием одномерного ультразвукового преобразователя заключается в том, что движение отслеживается только вдоль одной плоскости визуализации, которая предположительно совмещена с направлением движения. Если направление движения не совмещено с плоскостью визуализации преобразователя, возникает геометрическое искажение в панорамном изображении и пониженный потенциал для точных измерений.
Другой способ визуализировать длинные структуры заключается в ручном сканировании. При ручном сканировании ультразвуковой зонд вручную сканируется в направлении, перпендикулярном плоскости изображения (т.е. в вертикальной размерности), чтобы получать последовательность изображений из различных плоскостей, которые являются приблизительно параллельными друг другу. Эти изображения могут быть скомбинированы, чтобы создавать трехмерный объем, известный как ручная трехмерная визуализация. Ручное сканирование описано в патенте (США) Re. 36564 (Schwartz и др.). Ручная трехмерная визуализация позволяет отображать анатомические структуры из различных ориентаций и плоскостей вместо необходимости врачу в уме интерпретировать трехмерную ориентацию структуры из двумерных изображений. Ручное трехмерное сканирование может формировать объемы, размер которых ограничен только посредством размера доступных акустических окон и хранилища данных ультразвуковой системы, и, таким образом, имеет несколько клинических преимуществ по сравнению с традиционной трехмерной ультразвуковой визуализацией, в которой размер объема ограничен посредством максимального угла механического или электронного перемещения зонда.
Если точные измерения расстояний или объемов должны быть осуществлены из ручного трехмерного панорамного изображения, получение изображений должно быть калибровано так, что размеры и ориентации структур являются геометрически точными. При калиброванной трехмерной панорамной визуализации отслеживание и восстановление движения зонда является важным для получения калиброванного объема. Отслеживание ультразвукового зонда предоставляет оценки движения, которые непосредственно используются для того, чтобы компенсировать движение зонда во время перемещения зонда. Надежное восстановление трехмерных объемов также является важным для того, чтобы минимизировать потери качества изображений, ассоциированные с артефактами. Кроме того, также важно предоставлять обратную связь с пользователем в реальном времени для помощи в сканировании целевых структур.
Ручное обнаружение с помощью одномерного матричного зонда предложено для трехмерной панорамной визуализации, например, в патенте (США) 5899861 (Friemel и др.) и патенте (США) 6572549 (Jong и др.). При этом подходе движение зонда отслеживается посредством оценки скорости декорреляции спекл-структур в последовательно полученных изображениях из различных вертикальных плоскостей. Тем не менее, необходимо для спекл-структур оставаться частично коррелированными в последовательных изображениях, что не всегда может быть возможным, в частности, в ходе быстрого перемещения зонда. Кроме того, оценки движения на основе декорреляции спеклов являются не очень надежными, и на них сильное влияние оказывают артефакты, к примеру, из ярких зеркальных отражателей. Для более надежного отслеживания движения внешние датчики определения положения (например, магнитные или оптические) могут быть присоединены к одномерному матричному зонду, как описано в патенте (США) 6517491 (Thiele и др.). Тем не менее, эти устройства отслеживания подвержены помехам и низкой чувствительности и могут демонстрировать плохую точность. Подход также требует присоединения дополнительного оборудования к зонду и к системе, что является неудобным.
В последнее время, механические одномерные матричные зонды заменены введением электронно управляемых двумерных матричных зондов. Двумерный матричный преобразователь может электронно сканировать объемную область более трех размерностей посредством фазированного управления лучами. Необязательно механически перемещать зонд по телу, чтобы получать трехмерное изображение, и в зонде отсутствуют движущиеся части. Двумерный матричный зонд может формировать трехмерные объемные изображения в режиме реального времени и также может получать меньшие трехмерные объемы, которые объединяются, чтобы формировать изображение большего объема с координированным отображением петлевания кровотока, как описано в патенте (США) 5993390 (Savord и др.). Тем не менее, двумерные матричные зонды имеют ограничение, идентичное ограничению механических одномерных матричных зондов, которым является поле обзора, ограниченное областью ниже зонда.
Еще одним подходом к трехмерной визуализации являются недавно предложенные зонды на основе I-лучей или E-лучей, которые содержат первичную матрицу визуализации и две или три смежные перпендикулярные матрицы отслеживания, как описано в патенте (США) 6102865 (Hossack и др.). Тем не менее, этот подход ограничен в том, что он может оценивать движение зонда только в заранее согласованных направлениях, задаваемых посредством ориентации матриц отслеживания. Кроме того, такие системы являются дорогими, поскольку несколько матриц должны изготовляться в одном зонде и управляться одновременно. Точность определения положения зонда ограничена посредством размеров матриц отслеживания, которые обычно намного меньше размеров матрицы визуализации.
В соответствии с принципами настоящего изобретения, несколько плоских изображений получаются с использованием электронного управления лучами из двумерного матричного зонда. Эти плоские изображения используются для того, чтобы получать изображение или объем с расширенным полем обзора при одновременном отслеживании движения зонда в нескольких направлениях. В предпочтительном варианте осуществления, ручные трехмерные панорамные изображения создаются и отображаются с помощью двумерного матричного зонда, который может электронно управлять лучом в любой случайной плоскости изображений. Последовательности плоских изображений, состоящих из изображений B-режима и/или цветных доплеровских изображений (например, скорость, мощность и/или дисперсия), из первичной плоскости получаются в ходе перемещения двумерного матричного зонда вручную по целевым объектам. Ультразвуковые данные из этой плоскости и, при необходимости, также из других плоскостей получаются и используются для того, чтобы отслеживать движение зонда посредством вычисления регистрации между последовательными изображениями, полученными вдоль этих плоскостей. Оценки движения из каждой плоскости комбинируются, чтобы находить полный вектор движения зонда. Полная оценка движения используется для того, чтобы компенсировать движение зонда при восстановлении калиброванного объема из первичных плоских изображений. В соответствии с дополнительным аспектом настоящего изобретения, парциальные объемы отображаются в ходе перемещения двумерного матричного зонда для обратной связи с пользователем в реальном времени. В другом варианте осуществления, одно или более плоских изображений отображаются, чтобы показывать ход выполнения сканирования. Помимо этого, изображения из первичной плоскости могут отображаться наряду с двумерным панорамным изображением, сформированным из одной или более плоскостей оценки движения. В соответствии с другим аспектом настоящего изобретения, значок отображается в ходе перемещения зонда, чтобы сообщать врачу относительно скорости и/или направления движения зонда.
На чертежах:
Фиг. 1 иллюстрирует в форме блок-схемы ультразвуковую систему, созданную в соответствии с принципами настоящего изобретения.
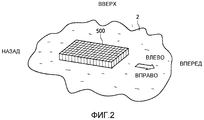
Фиг. 2 иллюстрирует двумерный матричный преобразователь, перемещающийся по коже субъекта.
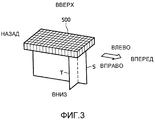
Фиг. 3 иллюстрирует получение ультразвуковой информации в двух плоскостях по мере того, как двумерный матричный преобразователь перемещается.
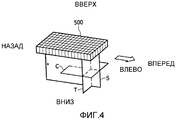
Фиг. 4 иллюстрирует получение ультразвуковой информации в трех плоскостях по мере того, как двумерный матричный преобразователь перемещается.
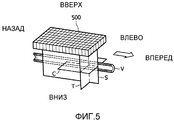
Фиг. 5 иллюстрирует технологию получения изображений по фиг. 4, чтобы визуализировать кровеносный сосуд увеличенной длины.
Фиг. 6a-6c иллюстрируют изменение в положении структур изображений в различных плоскостях по мере того, как двумерный матричный преобразователь, получающий изображения, перемещается.
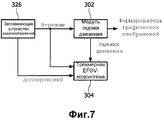
Фиг. 7 является более подробной блок-схемой компонентов оценки движения ультразвуковой системы по фиг. 1.
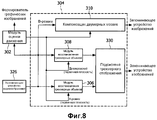
Фиг. 8 является более подробной блок-схемой EFOV-подсистемы по фиг. 7.
Фиг. 9 является более подробной блок-схемой модуля восстановления трехмерных объемов по фиг. 8.
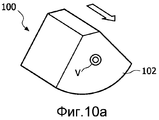
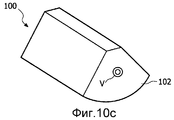
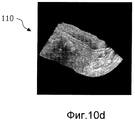
Фиг. 10a-10d иллюстрируют развертывание трехмерного EFOV-изображения с использованием двумерного матричного зонда в соответствии с настоящим изобретением.
Фиг. 11 иллюстрирует отображение, сформированное посредством ультразвуковой системы настоящего изобретения с индикаторами движения зонда, которые указывают скорость сканирования.
Фиг. 12 иллюстрирует другое отображение, сформированное посредством ультразвуковой системы настоящего изобретения с индикатором положения зонда, который указывает ход выполнения сканирования.
Ссылаясь сначала на фиг. 1, ультразвуковая система, созданная в соответствии с принципами настоящего изобретения, показана в форме блок-схемы. Зонд связан с системой, которая включает в себя двумерный матричный преобразователь 500 и формирователь 502 микролучей. Формирователь микролучей содержит схему, которые управляют сигналами, применяемыми к группам элементов ("участкам поверхности") матричного преобразователя 500 и осуществляет некоторую обработку эхо-сигналов, принимаемых посредством элементов каждой группы. Формирование микролучей в зонде преимущественно сокращает число проводов в кабеле 503 между зондом и ультразвуковой системой и описано в патенте (США) 5997479 (Savord и др.) и в патенте (США) 6436048 (Pesque).
Зонд связан со сканером 310 ультразвуковой системы. Сканер включает в себя контроллер 312 формирования лучей, который является чувствительным к пользовательскому управлению 36 и предоставляет управляющие сигналы в формирователь 502 микролучей, инструктирующие зонд относительно синхронизации, частоты, направления и фокусировки передаваемых лучей. Контроллер формирования лучей также управляет формированием лучей эхо-сигналов, принимаемых посредством сканера посредством управления аналого-цифровыми (A/D) преобразователями 316 и формирователем 116 лучей. Эхо-сигналы, принимаемые посредством зонда, усиливаются посредством схемы предусилителя 314 и TGC (управления временным усилением) в сканере, затем оцифровываются посредством аналого-цифровых преобразователей 316. Оцифрованные эхо-сигналы затем формируются в полностью управляемые и сфокусированные лучи посредством формирователя 116 лучей. Эхо-сигналы затем обрабатываются посредством процессора 318 изображений, который выполняет цифровую фильтрацию, обнаружение B-режима и доплеровскую обработку, а также может выполнять другую обработку сигналов, такую как выделение гармоник, уменьшение уровня спеклов через частотное составление и другую требуемую обработку изображений.
Эхо-сигналы, сформированные посредством сканера 310, связаны с подсистемой 320 отображения, которая обрабатывает эхо-сигналы для отображения в требуемом формате изображений. Эхо-сигналы обрабатываются посредством процессора 322 строк изображений, который допускает дискретизацию эхо-сигналов, соединение сегментов лучей в законченные строковые сигналы и усреднение строковых сигналов для улучшения "сигнал-шум" или постоянности потока. Стандарт сканирования строк изображений преобразуется в требуемый формат изображений посредством преобразователя 324 стандарта сканирования, который выполняет преобразование R-тета, как известно в данной области техники. Изображение затем сохраняется в запоминающем устройстве 328 изображений, из которого оно может отображаться на дисплее 150. На изображение в запоминающем устройстве также накладывается графика, которая должна отображаться с изображением, которое формируется посредством формирователя 330 графических изображений, который является чувствительным к пользовательскому управлению 36. Отдельные изображения или последовательности изображений могут быть сохранены в запоминающем устройстве 326 видеоизображений, во время фиксации контуров или последовательностей изображений.
Для объемной визуализации в реальном времени подсистема 320 отображения также включает в себя процессор представления трехмерных изображений в трехмерной EFOV-подсистеме 304 (описанной более полно на фиг. 8 и 9), который принимает строки изображений из процессора 322 строк изображений для представления трехмерного изображения в реальном времени, который связан с запоминающим устройством 328 изображений для отображения на дисплее 150.
В соответствии с принципами настоящего изобретения, трехмерная EFOV-подсистема формирует изображения для визуализации с расширенным полем обзора. EFOV-изображения могут быть двумерными плоскими изображениями, как описано в вышеуказанных патентах Olsson и др. и Roundhill, или могут быть трехмерными изображениями. EFOV-изображения собираются посредством оценки движения зонда в модуле 302 оценки движения с помощью данных изображений, предоставленных посредством запоминающего устройства 326 видеоизображений. Модуль оценки движения может отслеживать перемещение зонда вдоль тела пациента посредством регистрации данных последовательно полученных изображений, например, посредством использования технологии, называемой технологией поблочного сравнения MSAD, как описано в патенте (США) 6299579 (Peterson и др.). Другие технологии оценки движения, такие как регистрация нежесткого тела, могут использоваться при необходимости. Технология поблочного сравнения вычисляет смещение между последовательно полученными изображениями, которые, по меньшей мере, частично перекрываются. Если вычисляется смещение изображений в различных плоскостных ориентациях, вектор смещения как абсолютной величины, так и направления может вычисляться в трех размерностях посредством модуля 302 оценки движения. Вектор смещения предоставляет информацию положения в EFOV-подсистему 304 для определения относительного положения изображений, полученных из различных плоскостей по мере того, как зонд перемещается. Если последовательные изображения надлежащим образом располагаются относительно друг друга посредством EFOV-подсистемы, геометрически точное двух- или трехмерное EFOV-изображение формируется.
Технология EFOV-визуализации настоящего изобретения может более полно пониматься посредством обращения сначала к фиг. 2, который является видом в перспективе, иллюстрирующим движение двумерного матричного зонда, когда он получает EFOV-изображение. Показан двумерный матричный преобразователь 500 без окружающего зонд корпуса и комплекта преобразователей для простоты иллюстрации. На этом чертеже двумерный матричный преобразователь 500 проходит по поверхности кожи 2 пациента и получает данные изображений по мере того, как он перемещается. Двумерный матричный преобразователь перемещается в направлении большой стрелки, которое является направлением вперед, и от направления назад позади зонда. Любой стороной направления движения являются направления влево и вправо.
С учетом этих направленных ссылок, ссылка теперь приводится на фиг. 3, который показывает две плоскости "S" (сагиттальную) и "T" (поперечную), в которых изображения получаются по мере того, как зонд перемещается в направлении, указываемом посредством стрелки. Две плоскости проиллюстрированы в этом примере как имеющие прямоугольную форму, хотя в данном варианте осуществления они могут иметь другие форматы, к примеру, секторные или трапецеидальные формы. Две плоскости S и T показаны идущими в направлении вниз от двумерного матричного преобразователя 500. Хотя двумерный матричный преобразователь 500 допускает сканирование гораздо большего числа плоскостей изображений и фактически полного объема ниже матричного преобразователя, в этом варианте осуществления необходимо сканировать только две S- и T-плоскости. Потребность сканировать только две плоскости означает, что изображения могут быстро получаться в быстрой последовательности посредством чередования или перемежения сканирования двух плоскостей. Высокая частота кадров получения означает, что относительно незначительное движение возникает между изображениями, и имеется значительное перекрытие в содержимом данных изображений последовательных изображений, повышая способность находить подобие в данных изображений и вычислять вектор движения, а также улучшая пространственную дискретизацию для последующего восстановления калиброванного объема. Смещение между последовательными изображениями может быть точно оценено, и геометрически точное EFOV-изображение собрано посредством корректного местоположения изображений относительно друг друга.
В примере по фиг. 3, могут формироваться два типа EFOV-изображений. Одно формируется из последовательности изображений S-плоскости, полученных по мере того, как двумерный матричный преобразователь перемещается в направлении стрелки. Перемещение в направлении сзади вперед должно отражаться в содержимом изображений для последовательно полученных изображений S-плоскости. Перемещение вверх и вниз также должно отражаться в содержимом изображений S-плоскости. Смещение между последовательными изображениями T-плоскости должно раскрывать перемещение в направлениях влево или вправо, а также вверх и вниз. Таким образом, эти оценки смещения используются для того, чтобы формировать вектор относительного смещения от одного изображения S-плоскости к следующему. Последовательность изображений S-плоскости затем накладывается с совмещением и объединяется, чтобы формировать двумерное EFOV-изображение с самой длинной размерностью в направлении стрелки. Важно отметить то, что в отличие от традиционной EFOV-визуализации с использованием одномерного преобразователя, согласно принципам настоящего изобретения, необязательно точное совмещение движения зонда с S-плоскостью. Даже если движение отклоняется от этой плоскости, то это отклонение должно отслеживаться посредством T-плоскости так, что хорошо калиброванное панорамное изображение может формироваться.
Другим EFOV-изображением, которое может получаться в примере по фиг. 3, является трехмерное EFOV-изображение, компилированное из последовательно полученных изображений T-плоскости. Вектор смещения между последовательно полученными изображениями T-плоскости вычисляется из информации изображений S- и T-плоскости, как описано выше, затем используется для того, чтобы надлежащим образом находить последовательные изображения T-плоскости относительно друг друга. По мере того, как изображения T-плоскости продолжают получаться в направлении стрелки, толщина трехмерного изображения в направлении стрелки растет по мере того, как большее число T-плоскостей последовательного смещения находится перед ранее полученными и размещенными изображениями. Трехмерное EFOV-изображение, таким образом, имеет самую длинную размерность, нормальную к T-плоскости.
Можно формировать оба изображения одновременно, поскольку плоские изображения постоянно получаются как для двумерных EFOV-, так и для трехмерных EFOV-изображений. Например, может получаться расширенное объемное изображение ткани, перехваченное посредством последовательных изображений T-плоскости, и расширенная секущая плоскость вниз к центру этого объема может быть сформирована посредством EFOV последовательных S-плоскостей. S- и T-плоскости не должны быть ассоциированы с конкретными размерностями физической матрицы 500 преобразователей, а могут получаться с S-плоскостью, ориентированной вдоль любой размерности, с T-плоскостью, перпендикулярной к ней. S-плоскость не должна быть центрирована под двумерной матрицей, как показано на фиг. 3, а может получаться на любой стороне центра или при угловом наклоне, чтобы формировать EFOV-изображение по-разному ориентированной секущей плоскости трехмерного объема трехмерного EFOV-изображения. В зависимости от выбора апертур для S- и T-плоскостей, T-плоскость не обязательно может быть перпендикулярной S-плоскости.
Пример по фиг. 3 добавляет третью плоскость получения, плоскость "C" (поперечного сечения), поскольку плоскости, параллельные основной плоскости двумерной матрицы, известны. Смещение между последовательными изображениями C-плоскости вычисляется, как описано выше, и указывает движение преобразователя с двумерной матрицей в направлениях сзади вперед и влево и вправо. Когда последовательные изображения T-плоскости предоставляют информацию смещения в направлениях вверх и вниз, можно видеть, что трехмерный вектор смещения может вычисляться без необходимости какой-либо информации из S-плоскости. Это означает, что для двумерного EFOV-изображения, компилированного из изображений из S-плоскости, получение S-плоскости может быть оптимизировано для визуализации, и получение T- и C-плоскости может быть оптимизировано для измерения смещения. Альтернативно, если последовательные изображения T-плоскости должны собираться в трехмерном EFOV-изображении, получения C- и S-плоскости могут быть оптимизированы для измерения смещения, тогда как получения T-плоскости оптимизированы для визуализации. Размеры изображений измерения смещения могут быть сделаны меньшими или их межстрочное разнесение большим, например, при этом плоскость изображений сохраняется большой и с высокой плотностью строк для изображения высокой четкости.
Также можно в примере фиг. 4 собирать двумерное EFOV-изображение из последовательных изображений C-плоскости, при необходимости. Если C-плоскость получается, объемные данные между C-плоскостью и зондом получаются без дополнительной акустической передачи. Последовательные последовательности объемных данных могут совмещаться посредством трехмерной регистрации, чтобы находить шесть степеней свободы зонда (три перемещения в пространстве и три вращения) во всем процессе получения, что дает возможность точного восстановления трехмерного или двумерного EFOV-изображения.
Следует принимать во внимание, что движение, которое является нормальным к плоскости, заставляет содержимое изображений плоскости изображений быстро декоррелироваться от одной плоскости к другой, что делает проблематичной оценку смещения в этом направлении. Тем не менее, использование нескольких по-разному ориентированных плоскостей предоставляет возможность такому вертикальному смещению возникать в плоскости другого изображения, при этом корреляция от изображения к изображению должна оставаться высокой, и смещение по-прежнему может быть точно оценено.
Фиг. 5 иллюстрирует EFOV-сканирование кровеносного сосуда V в теле при помощи T-, S- и C-плоскостей. В этом примере, EFOV-изображение формируется для значительной длины кровеносного сосуда V, предоставляя возможность диагностики большинства или всех характеристик сосуда в одном изображении. По мере того как зонд двумерного матричного преобразователя перемещается, S-плоскость сохраняется совмещенной с центром кровеносного сосуда V так, что изображение секущей плоскости вниз к вертикальному центру сосуда может быть сформировано. Глубина C-плоскости задается так, что эта плоскость продолжает пересекать горизонтальный центр кровеносного сосуда, если сосуд остается на постоянной глубине в теле. T-плоскость продолжает перехватывать кровеносный сосуд и его окружающую ткань по мере того, как зонд перемещается. Эта компоновка может использоваться, например, чтобы одновременно формировать несколько EFOV-изображений, трехмерное EFOV-изображение кровеносного сосуда V из последовательных изображений T-плоскости и ортогонально ориентированных двумерных секущих плоскостей последовательных изображений T- и C-плоскости.
Фиг. 6a-6c иллюстрируют различные смещения в плоскости, которые могут быть легко определены из последовательностей по-разному ориентированных плоскостей. Как показывает фиг. 6a, структура S1, которая выглядит находящейся впереди в одном S-изображении, должна выглядеть перемещенной назад в следующем последовательном изображении S-плоскости, если зонд перемещается в направлении стрелки, как указано посредством небольшой стрелки между последовательными положениями s1 и s2 структуры. Смещения структуры вверх и вниз также является легко заметным из относительных положений структуры в последовательных изображениях. Фиг. 6B показывает, что положение структуры s1 в одном изображении T-плоскости изменяется на положение s2 в последовательном изображении T-плоскости, если зонд перемещается влево. Смещение вверх и вниз также может легко различаться из последовательных изображений T-плоскости. Последовательные изображения C-плоскости легко раскрывают перемещение зонда спереди назад, а также перемещение влево и вправо, как показано на фиг. 6c.
Фиг. 7 является блок-схемой, показывающей соединения между модулем 302 оценки движения и трехмерной EFOV-подсистемой 304 по фиг. 1. В этом варианте осуществления, запоминающее устройство 326 видеоизображений сохраняет принимаемые плоские изображения до их использования для EFOV-изображений. Изображения B-режима используются для оценки движения в этом примере, поскольку изображения B-режима не демонстрируют артефакты пульсации или мерцания некоторых доплеровских сигналов. Модуль оценки движения анализирует последовательные изображения B-режима и оценивает векторы смещения от изображения к изображению. Эти оценки движения перенаправляются в трехмерную EFOV-подсистему, в которой они используются для того, чтобы относительно совмещать полученные изображения. Изображения, которые совмещаются, могут быть доплеровскими изображениями, изображениями B-режима или и тем, и другим, когда перенаправляются в трехмерную EFOV-подсистему из запоминающего устройства видеоизображений. Модуль оценки движения также формирует информацию движения для формирователя 330 графических изображений, который использует информацию для отображения одного или более значков индикатора движения при отображении изображений, как описано ниже.
Фиг. 8 является блок-схемой, иллюстрирующей дополнительные подробности трехмерной EFOV-подсистемы 304, созданной в соответствии с принципами настоящего изобретения. Оценки движения из модуля 302 оценки движения связаны с компоновщиком 310 двумерных мозаик, доплеровским модулем 308 восстановления трехмерных объемов и модулем 306 восстановления трехмерных объемов B-режима. Изображения B-режима, сохраненные в запоминающем устройстве 326 видеоизображений, предоставляются в компоновщик 310 двумерных мозаик, модуль 302 оценки движения и модуль 306 восстановления трехмерных объемов B-режима. Доплеровские изображения предоставляются в доплеровский модуль 308 восстановления трехмерных объемов. Модули восстановления трехмерных объемов функционируют идентично модулю представления трехмерных изображений, описанному в патенте (США) 5572291 (Schwartz), в котором трехмерное изображение подготавливается посредством представления из множества двумерных изображений, ориентированных относительно друг друга в соответствии с оценками движения модуля оценки движения. Один или оба трехмерных представлений, в зависимости от предоставленной информации изображений, связаны с подсистемой 330 трехмерного отображения, в которой изображения тканей и потока B-режима и доплеровские представления могут быть объединены для трехмерного изображения ткани и потока, как описано в патенте 291. Различные улучшения трехмерной визуализации также могут применяться в подсистеме трехмерного отображения, к примеру, многоплоскостное восстановление и представление поверхностей. Трехмерное изображение предоставляется в запоминающее устройство 328 изображений для отображения. Компоновщик 210 двумерных мозаик комбинирует кадры частично перекрывающихся двумерных изображений, чтобы формировать, двумерное EFOV-изображение, как описано в вышеуказанном патенте Olsson и др. Двумерное EFOV-изображение также предоставляется в запоминающее устройство 328 изображений, из которого оно может отображаться независимо или вместе с трехмерным EFOV-изображением подсистемы 330 трехмерного отображения. Например, подсистема 330 трехмерного отображения может предоставлять трехмерное EFOV-изображение объема в теле, при этом компоновщик двумерных мозаик предоставляет двумерное EFOV-изображение плоского среза через трехмерный объем.
Фиг. 9 является блок-схемой, иллюстрирующей дополнительные подробности модуля восстановления трехмерных объемов по варианту осуществления настоящего изобретения. Проиллюстрированный модуль 306, 308 восстановления трехмерных объемов может одновременно формировать трехмерные изображения с прямым и обратным преобразованием данных посредством модуля 332 прямого восстановления и модуля 334 обратного восстановления. Трехмерный объем восстанавливается с помощью прямого преобразования, при котором входные данные непосредственно преобразуются в выходные вокселы в зависимости от матриц преобразования, которые предоставляются посредством оценки движения. Хотя этот подход может предоставлять быструю реакцию при разрешении, потенциально идентичном разрешению входного двумерного изображения, поскольку новые данные изображений добавляются к подготовленному посредством представления объему, как только они принимаются, результирующее трехмерное изображение может иметь бреши в восстановленном объеме. С другой стороны, способ обратного преобразования модуля обратного восстановления использует матрицы обратного преобразования так, что более подробные выходные вокселы формируются из входных данных посредством интерполяции. При трехмерном восстановлении с обратным преобразованием меньшее число брешей появляется в восстановленном объеме, но скорость реакции ниже, поскольку восстановление должно ожидать всех входных данных из сканирования до того, как межплоскостные данные изображений могут быть интерполированы. Подходящий способ интерполяции, который может использоваться, выражается следующим образом:
- где Q0 - это интерполированное пикселное значение между двумя полученными пикселами Q1 и Q2, которые отстоят от полученных пикселов на расстояния d1 и d2, соответственно. Другие технологии интерполяции высшего порядка, к примеру, полиномиальная и сплайн-интерполяция, альтернативно могут использоваться. Проиллюстрированный вариант осуществления предлагает прямое и обратное восстановление так, что пользователь имеет возможность более быстрого или более подробного восстановления для отображения.
Фиг. 10a-10d иллюстрируют то, как трехмерное EFOV-изображение появляется на дисплее ультразвуковой системы по мере того, как пациент сканируется. По мере того, как зонд перемещается в направлении, указываемом посредством стрелки на фиг. 10a, плоскости изображений, которые делят пополам кровеносный сосуд V, последовательно добавляются к передней поверхности сканируемого и отображаемого объема 100. По мере того, как зонд продолжает свое перемещение вдоль кожи пациента, все большее число плоскостей сканируется и добавляется в начало объема, и объем растет в этой размерности, как показано в более длинном EFOV-объеме 100 по фиг. 10b. По мере того, как зонд перемещается дальше, большее число плоскостей спереди добавляется к объему, который растет еще больше, как проиллюстрировано на фиг. 10c. Как пояснено ранее, каждая новая плоскость обнаруживается относительно предыдущих плоскостей объема посредством оценки движения и, следовательно, смещения от последней полученной плоскости до текущей. Эта информация смещения может вычисляться из данных изображений одной или более ортогональных плоскостей сканирования, таких как плоскости изображений C или S, как проиллюстрировано на фиг. 3, 4 и 5. Каждая новая полученная плоскость тем самым добавляется с учетом ее корректной геометрической взаимосвязи с ранее полученными плоскостями и объемом. Таким образом, результирующий объем является геометрически точным и допускающим поддержку количественных измерений структуры, показанной в объеме. Фиг. 10d является иллюстрацией фактического трехмерного EFOV-изображения, полученного и сформированного в соответствии с настоящим изобретением. (Диапазон черно-белых полутонов пикселов изображения изменен на противоположное от обычного черно-белого на фиг. 10d для простоты иллюстрации).
Фиг. 11 иллюстрирует EFOV-отображение 50 ультразвуковой системы, созданной в соответствии с принципами настоящего изобретения, которое дает представление врачу, который перемещает ультразвуковой зонд, для того чтобы получать EFOV-изображение. В этом примере двумерное EFOV-изображение 66 компилируется из последовательности частичных изображений, полученных в сагиттальной плоскости S по фиг. 3. По мере того, как зонд перемещается, частичные изображения непрерывно получаются и в сагиттальной S- и в поперечной T-плоскостях. Изображения в обеих плоскостях используются посредством модуля 302 оценки движения для того, чтобы отслеживать перемещение зонда. Некоторые или все поперечные и сагиттальные частичные изображения показаны в верхней части дисплея, где 52 - это недавно полученное поперечное изображение плоскости, а 54 - это недавно полученное сагиттальное изображение плоскости. Графические значки 56 и 58, сформированные посредством формирователя 330 графических изображений, отображаются выше частичных изображений 52 и 54 и содержат поле, которое выделяется цветом, чтобы указывать соответствующую ориентацию плоскости. В этом примере ориентация указывается, как будто плоскость просматривается с границы выше преобразователя 500.
В соответствии с принципами настоящего изобретения, два индикатора 6 движения зонда показаны в центре дисплея 50. Каждый индикатор движения зонда имеет цветную полосу 60, 62, которая разграничивает диапазон, и небольшой треугольник (указываемый посредством стрелок), который указывает точку в диапазоне. В этом примере каждый индикатор движения зонда предоставляет индикатор врачу относительно скорости, с которой зонд перемещается, причем два проиллюстрированных индикатора предназначены для поперечного и сагиттального движения, соответственно. Положение графического треугольника выше каждого поля вычисляется из смещения от кадра к кадру, оцененного посредством модуля 302 оценки движения, и известных моментов времени, в которые получены кадры. Сведения этих значений времени и расстояния предоставляют прямую оценку скорости в данном направлении. В этом примере, поскольку врач выполняет EFOV-сканирование посредством перемещения зонда в сагиттальном направлении вперед, как показано на фиг. 3, индикатор поперечного движения сообщает врачу то, движение его зонда осуществляется по прямой линии вдоль тела или отклоняется влево либо вправо. Если небольшой треугольник остается центрированным по цветной полосе 60, зонд перемещается по прямой линии вперед в этом примере. Это означает, что каждое последовательное сагиттальное частичное изображение, используемое для того, чтобы формировать EFOV-изображение 66, находится практически в идентичной плоскости изображений. Но если зонд начинает перемещаться влево или вправо, то последовательные частичные изображения не располагаются в одной плоскости, и небольшой треугольник, соответственно, перемещается влево или вправо от центра цветной полосы, чтобы указывать это двигательное отклонение. Чем быстрее зонд перемещается влево или вправо, тем больше отображаемое отклонение небольшого треугольника от центра цветной полосы. Если зонд возобновляет перемещение по прямой линии вперед, небольшой треугольник должен возвращаться и снова оставаться центрированным.
Индикатор сагиттального движения зонда, включающий в себя цветную полосу 62, должен указывать скорость в направлении вперед в этом примере. Перед тем как сканирование начинается, и зонд неподвижно фиксируется на пациенте, небольшой треугольник находится выше дальней левой стороны цветной полосы, нулевой точки скорости. Когда врач начинает перемещать зонд, и его скорость увеличивается, небольшой треугольник начинает перемещаться вправо, чтобы указывать скорость зонда в сагиттальном направлении вперед. Для однородного EFOV-изображения желательно перемещать зонд с постоянной скоростью так, что частичные изображения получаются практически при равномерно разнесенных временных и пространственных интервалах. С помощью параметров, доступных в данном варианте осуществления, таких как требуемая длина изображения, объем доступного запоминающего устройства видеоизображений, величина перекрытия частичных изображений и т.п., врач может настраивать систему так, что небольшой треугольник центрируется по цветной полосе, если зонд перемещается с требуемой скоростью. Таким образом, чтобы сканировать прямую протяженность анатомии с требуемой скоростью, врач должен видеть только то, что два небольших треугольника остаются в центре соответствующих цветных полос по мере того, как зонд перемещается. Посредством сохранения этого расположения небольших треугольников, врач будет получать высококачественное EFOV-изображение, которое требуется. Поскольку некоторые пользователи могут пристально просматривать отображаемое изображение в ходе получения, также можно предоставлять звуковой сигнал, такой как звук звонка, если зонд перемещается слишком быстро или слишком медленно.
Следует принимать во внимание, что один или оба из индикаторов движения зонда могут выражаться в единицах, отличных от скорости. Например, врач может определять получать EFOV-изображение на расстоянии на теле в 50 см. Поле 62 индикатора сагиттального движения зонда затем может задаваться так, чтобы указывать прохождение до этого расстояния с началом в нуле в левой стороне цветной полосы 62 и с продвижением к покрываемому расстоянию в 50 см справа. Когда врач начинает сканирование, небольшой треугольник должен продолжать перемещаться со смещением зонда от начальной точки. Если небольшой треугольник полностью перемещен к правому концу цветной полосы, врач должен знать, что 50 см сканирования завершено. Другой единицей, в которой могут быть выражены индикаторы движения зонда, например, является время.
Фиг. 12 иллюстрирует второе EFOV-отображение 50 ультразвуковой системы, созданной в соответствии с принципами настоящего изобретения, которое дает представление врачу, который перемещает ультразвуковой зонд, для того чтобы получать EFOV-изображение. В этом примере отображение не показывает EFOV-изображение по мере того, как он развертывается, а показывает только частичные изображения 52 и 54 по мере того, как они получаются. Это частичные изображения, которые используются посредством модуля оценки движения для того, чтобы отслеживать перемещение зонда. Как в предыдущем примере, значки 56, 58 ориентаций плоскостей показаны выше соответствующих частичных изображений 52, 54.
В области дисплея выше частичных изображений отображается графический трек пути, по которому проходит зонд по мере того, как EFOV-сканирование выполняется. В этом примере трек 70 формируется посредством последовательности небольших точек. Ориентационные стрелки ниже трека 70 указывают поперечное (влево-вправо) и сагиттальное (назад-вперед) направления. Трек 70 формируется из оценок смещения, сформированных посредством модуля 302 оценки движения. Последовательности кругов 72 фиксируются вдоль трека 70, которые помечают приращения в 1 см в пути, обозначенном посредством трека. Альтернативно круги 70 могут фиксироваться после того, как данное число частичных кадров получено, или после того, как другое приращение времени выяснено в ходе сканирования, давая врачу чувство равномерности движения зонда. В конце трека 70 большая точка 8 указывает текущее положение зонда в ходе движения зонда. Путь трека 70 может быть связан с конкретной точкой матрицы, к примеру, посредством использования оси пересечения S- и T-плоскостей и ее точки начала на двумерной матрице как опорной точки местоположения зонда.
В этом примере трехмерное EFOV-изображение компилируется из последовательности поперечных плоскостей 52.
В этом проиллюстрированном примере объем сканируемой ткани включает в себя кровеносный сосуд V, показанный в боковом поперечном сечении в поперечном частичном изображении 52 и в продольном поперечном сечении в сагиттальном частичном изображении 54. Врач может управлять перемещением зонда, чтобы сохранять боковое поперечное сечение кровеносного сосуда V центрированным в середине каждого последовательного поперечного частичного изображения 52, как показано на чертеже и с помощью последовательности сагиттальных частичных изображений 54, продолжающей показывать основную продольную секущую плоскость кровеносного сосуда V. Врач таким образом направляется для получения трехмерного EFOV-изображения, которое полностью охватывает кровеносный сосуд V. После того, как управляемое получение изображений закончено, врач может переключаться на представление трехмерного EFOV-изображения, такого как EFOV-изображение по фиг. 10d.
Хотя предпочтительный вариант осуществления использует зонд двумерного матричного преобразователя, который электронно управляет лучами в требуемых плоскостях изображений по мере того, как зонд перемещается, следует принимать во внимание, что EFOV-сканирование и получение изображений также могут выполняться с помощью механического зонда для трехмерного сканирования, который задает колебания одномерной матрицы назад и вперед в зонде по мере того, как зонд перемещается. Например, трехмерный механический зонд, показанный в публикации патента (США) 2004/0254466, может использоваться для EFOV-сканирования в соответствии с настоящим изобретением. Каждый раз, когда движущаяся одномерная матрица достигает данного положения в своем колебательном перемещении, изображение может получаться в ориентации плоскости изображения этого положения матрицы. Один или несколько близлежащих элементов матрицы могут непрерывно управляться так, чтобы непрерывно сканировать ортогональную плоскость по мере того, как матрица колеблется. По мере того, как зонд перемещается вдоль кожи пациента, эти два обнаружения будут непрерывно сканировать две различных плоскости по мере того, как зонд перемещается при EFOV-сканировании.
Claims (15)
1. Ультразвуковая система диагностической визуализации, которая формирует изображение с расширенным полем обзора (EFOV), содержащая:
- ультразвуковой зонд, включающий в себя двумерный матричный преобразователь, выполненный с возможностью перемещения вдоль поверхности субъекта;
- формирователь лучей, связанный с матричным преобразователем, который управляет зондом, чтобы многократно сканировать множество пересекающихся изображений в плоскостях изображений двух различных ориентации плоскостей относительно матрицы по мере того, как зонд перемещается вдоль поверхности; причем первая ориентация плоскости является S-плоскостью, которая идет от матрицы и, по существу, выровнена с направлением перемещения преобразователя, а вторая ориентация плоскости является Т-плоскостью, которая также идет от матрицы и, по существу, перпендикулярна направлению перемещения преобразователя;
- процессор изображений, чувствительный к сигналам, принимаемым из матричного преобразователя, чтобы формировать последовательности изображений двух различных ориентации плоскостей по мере того, как зонд перемещается;
- модуль оценки движения, чувствительный, по меньшей мере, к одной из последовательностей изображений, которая формирует оценки движения зонда;
- EFOV-подсистема, чувствительная к оценкам движения зонда, которая выполнена с возможностью формировать EFOV-изображение, по меньшей мере, из одной из последовательностей изображений; и
- дисплей, чувствительный к EFOV-подсистеме, для отображения EFOV-изображения.
- ультразвуковой зонд, включающий в себя двумерный матричный преобразователь, выполненный с возможностью перемещения вдоль поверхности субъекта;
- формирователь лучей, связанный с матричным преобразователем, который управляет зондом, чтобы многократно сканировать множество пересекающихся изображений в плоскостях изображений двух различных ориентации плоскостей относительно матрицы по мере того, как зонд перемещается вдоль поверхности; причем первая ориентация плоскости является S-плоскостью, которая идет от матрицы и, по существу, выровнена с направлением перемещения преобразователя, а вторая ориентация плоскости является Т-плоскостью, которая также идет от матрицы и, по существу, перпендикулярна направлению перемещения преобразователя;
- процессор изображений, чувствительный к сигналам, принимаемым из матричного преобразователя, чтобы формировать последовательности изображений двух различных ориентации плоскостей по мере того, как зонд перемещается;
- модуль оценки движения, чувствительный, по меньшей мере, к одной из последовательностей изображений, которая формирует оценки движения зонда;
- EFOV-подсистема, чувствительная к оценкам движения зонда, которая выполнена с возможностью формировать EFOV-изображение, по меньшей мере, из одной из последовательностей изображений; и
- дисплей, чувствительный к EFOV-подсистеме, для отображения EFOV-изображения.
2. Ультразвуковая система диагностической визуализации по п.1, в которой EFOV-подсистема выполнена с возможностью формировать двумерное (2D) EFOV-изображение из последовательности S-плоскостей.
3. Ультразвуковая система диагностической визуализации по п.1, в которой EFOV-подсистема выполнена с возможностью формировать трехмерное (3D) EFOV-изображение из последовательности Т-плоскостей.
4. Ультразвуковая система диагностической визуализации по п.1, в которой матричный преобразователь дополнительно содержит двумерный матричный преобразователь, который выполняет электронное управление лучами.
5. Ультразвуковая система диагностической визуализации по п.1, в которой модуль оценки движения формирует оценки движения зонда посредством анализа данных изображений для последовательно полученных изображений данного набора ориентации плоскостей.
6. Ультразвуковая система диагностической визуализации по п.1, в которой различными ориентациями плоскостей являются сагиттальная ориентация плоскости и поперечная ориентация плоскости.
7. Ультразвуковая система диагностической визуализации по п.6, дополнительно содержащая ориентацию С-плоскости.
8. Способ работы с ультразвуковой системой диагностической визуализации по п.1, чтобы формировать EFOV-изображение, содержащий этапы, на которых:
- перемещают ультразвуковой зонд вдоль поверхности субъекта;
- многократно получают изображения двух различных ориентаций, включая ориентацию Т-плоскости по мере того, как зонд перемещается, причем плоскость изображения каждой ориентации плоскости идет от двумерного матричного преобразователя;
- оценивают смещение зонда из изображений, получаемых в одной или более ориентации плоскостей по мере того, как зонд перемещается;
- используют оценки смещения зонда для того, чтобы формировать EFOV-изображение из изображений, полученных из одной из ориентации плоскостей; и
- отображают EFOV-изображение на дисплее,
причем зонд перемещают в целом в направлении одной из плоскостей, при этом другая плоскость пересекает направление движения.
- перемещают ультразвуковой зонд вдоль поверхности субъекта;
- многократно получают изображения двух различных ориентаций, включая ориентацию Т-плоскости по мере того, как зонд перемещается, причем плоскость изображения каждой ориентации плоскости идет от двумерного матричного преобразователя;
- оценивают смещение зонда из изображений, получаемых в одной или более ориентации плоскостей по мере того, как зонд перемещается;
- используют оценки смещения зонда для того, чтобы формировать EFOV-изображение из изображений, полученных из одной из ориентации плоскостей; и
- отображают EFOV-изображение на дисплее,
причем зонд перемещают в целом в направлении одной из плоскостей, при этом другая плоскость пересекает направление движения.
9. Способ по п.8, в котором оценка дополнительно содержит этап, на котором сравнивают данные изображений для последовательно полученных изображений одной ориентации плоскости.
10. Способ по п.8, в котором использование дополнительно содержит этап, на котором формируют двумерное EFOV-изображение из последовательности изображений, полученных из сагиттальной ориентации плоскости по мере того, как зонд перемещается.
11. Способ по п.8, в котором использование дополнительно содержит этап, на котором формируют трехмерное EFOV-изображение из последовательности изображений, полученных из поперечной ориентации плоскости по мере того, как зонд перемещается.
12. Способ по п.8, в котором оценка смещения зонда дополнительно содержит этап, на котором оценивают смещение зонда из изображений В-режима.
13. Способ по п.12, в котором использование оценок смещения зонда для того, чтобы формировать EFOV-изображение, дополнительно содержит этап, на котором формируют одно или оба из EFOV-изображения В-режима и допплеровского EFOV-изображения.
14. Способ по п.8, в котором использование дополнительно содержит этап, на котором формируют EFOV-изображение из последовательности изображений, полученных из ориентации С-плоскости по мере того, как зонд перемещается.
15. Способ по п.8, в котором использование дополнительно содержит этап, на котором формируют трехмерное EFOV-изображение из последовательности изображений, полученных из ориентации С-плоскости и объемных данных между С-плоскостью и зондом по мере того, как зонд перемещается.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US5894908P | 2008-06-05 | 2008-06-05 | |
| US61/058,949 | 2008-06-05 | ||
| PCT/IB2009/052321 WO2009147620A2 (en) | 2008-06-05 | 2009-06-02 | Extended field of view ultrasonic imaging with a two dimensional array probe |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2010154468A RU2010154468A (ru) | 2012-07-20 |
| RU2507535C2 true RU2507535C2 (ru) | 2014-02-20 |
Family
ID=41398622
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2010154468/28A RU2507535C2 (ru) | 2008-06-05 | 2009-06-02 | Визуализация ультразвуковых изображений с расширенным полем обзора с помощью двумерного матричного зонда |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8539838B2 (ru) |
| EP (1) | EP2288934A2 (ru) |
| JP (1) | JP5681623B2 (ru) |
| CN (1) | CN102057296B (ru) |
| RU (1) | RU2507535C2 (ru) |
| WO (1) | WO2009147620A2 (ru) |
Families Citing this family (51)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8852107B2 (en) * | 2008-06-05 | 2014-10-07 | Koninklijke Philips N.V. | Extended field of view ultrasonic imaging with guided EFOV scanning |
| JP5596940B2 (ja) * | 2009-06-30 | 2014-09-24 | 株式会社東芝 | 超音波診断装置 |
| US9255914B2 (en) * | 2009-08-13 | 2016-02-09 | Kabushiki Kaisha Toshiba | Ultrasonic diagnosis apparatus and program |
| EP4235215A3 (en) | 2010-02-18 | 2024-02-28 | Maui Imaging, Inc. | Point source transmission and speed-of-sound correction using multi-aperture ultrasound imaging |
| KR101906838B1 (ko) | 2010-10-13 | 2018-10-11 | 마우이 이미징, 인코포레이티드 | 오목한 초음파 트랜스듀서들 및 3d 어레이들 |
| WO2012066470A1 (en) * | 2010-11-19 | 2012-05-24 | Koninklijke Philips Electronics N.V. | A method for guiding the insertion of a surgical instrument with three dimensional ultrasonic imaging |
| WO2012073164A1 (en) | 2010-12-03 | 2012-06-07 | Koninklijke Philips Electronics N.V. | Device and method for ultrasound imaging |
| CN102166122A (zh) * | 2011-04-29 | 2011-08-31 | 华南理工大学 | 一种蛇形轨迹超声宽景成像方法 |
| CN104168837A (zh) * | 2011-10-10 | 2014-11-26 | 神经束公司 | 用手持图像设备对组织进行全面检查的方法、装置和系统 |
| KR101270639B1 (ko) * | 2011-11-29 | 2013-06-03 | 삼성메디슨 주식회사 | 진단 장치 및 그 동작 방법 |
| JP6407719B2 (ja) | 2011-12-01 | 2018-10-17 | マウイ イマギング,インコーポレーテッド | ピングベース及び多数開口ドップラー超音波を用いた運動の検出 |
| CN107028623B (zh) | 2012-02-21 | 2020-09-01 | 毛伊图像公司 | 使用多孔超声确定材料刚度 |
| KR102103137B1 (ko) | 2012-03-26 | 2020-04-22 | 마우이 이미징, 인코포레이티드 | 가중 인자들을 적용함으로써 초음파 이미지 품질을 향상시키는 시스템들 및 방법들 |
| EP2883079B1 (en) | 2012-08-10 | 2017-09-27 | Maui Imaging, Inc. | Calibration of multiple aperture ultrasound probes |
| CN103676827A (zh) | 2012-09-06 | 2014-03-26 | Ip音乐集团有限公司 | 用于远程控制音频设备的系统和方法 |
| US10074199B2 (en) | 2013-06-27 | 2018-09-11 | Tractus Corporation | Systems and methods for tissue mapping |
| US9883848B2 (en) | 2013-09-13 | 2018-02-06 | Maui Imaging, Inc. | Ultrasound imaging using apparent point-source transmit transducer |
| JP6293452B2 (ja) * | 2013-10-30 | 2018-03-14 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 超音波診断装置及び画像解析装置 |
| CN103750859B (zh) * | 2014-01-20 | 2016-01-06 | 华南理工大学 | 基于位置信息的超声宽景成像方法 |
| EP2926736B1 (en) * | 2014-03-31 | 2020-06-17 | Esaote S.p.A. | Apparatus and method for ultrasound image acquisition, generation and display |
| US10401493B2 (en) | 2014-08-18 | 2019-09-03 | Maui Imaging, Inc. | Network-based ultrasound imaging system |
| WO2016055902A1 (en) | 2014-10-09 | 2016-04-14 | Koninklijke Philips N.V. | Three dimensional ultrasound imaging by intersecting 2d scanning |
| KR20160066927A (ko) * | 2014-12-03 | 2016-06-13 | 삼성전자주식회사 | 컴퓨터 보조 진단 지원 장치 및 방법 |
| US20160206291A1 (en) * | 2015-01-16 | 2016-07-21 | General Electric Company | Live ultrasound image and historical ultrasound image frame overlapping |
| KR20160107528A (ko) * | 2015-03-04 | 2016-09-19 | 삼성전자주식회사 | 컴퓨터 보조 진단을 위한 신뢰도 제공 장치 및 방법 |
| JP6770973B2 (ja) | 2015-03-30 | 2020-10-21 | マウイ イマギング,インコーポレーテッド | 物体の動きを検出するための超音波イメージングシステム及び方法 |
| EP3277189B1 (en) * | 2015-03-31 | 2018-10-24 | Koninklijke Philips N.V. | Ultrasound imaging apparatus |
| JP6744141B2 (ja) * | 2015-06-16 | 2020-08-19 | キヤノンメディカルシステムズ株式会社 | 超音波診断装置及び画像処理装置 |
| US10709416B2 (en) * | 2015-06-30 | 2020-07-14 | Wisconsin Alumni Research Foundation | Obstetrical imaging at the point of care for untrained or minimally trained operators |
| US11129586B1 (en) * | 2015-08-14 | 2021-09-28 | Volumetrics Medical Systems, LLC | Devices, methods, systems, and computer program products for 4-dimensional ultrasound imaging |
| CN105147331A (zh) * | 2015-10-14 | 2015-12-16 | 苏州斯科特医学影像科技有限公司 | 三维超声在人工流产中的应用 |
| CN105193449A (zh) * | 2015-10-14 | 2015-12-30 | 苏州斯科特医学影像科技有限公司 | 三维超声在子宫输卵管造影中的应用 |
| KR102551252B1 (ko) | 2015-11-11 | 2023-07-05 | 삼성메디슨 주식회사 | 초음파 진단 장치 및 그 동작방법 |
| JP6960922B2 (ja) * | 2015-12-21 | 2021-11-05 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 被験者のボリュームを検査する超音波撮像装置及び超音波撮像方法 |
| US10856846B2 (en) | 2016-01-27 | 2020-12-08 | Maui Imaging, Inc. | Ultrasound imaging with sparse array probes |
| US10327624B2 (en) * | 2016-03-11 | 2019-06-25 | Sony Corporation | System and method for image processing to generate three-dimensional (3D) view of an anatomical portion |
| JP6868040B2 (ja) * | 2016-04-26 | 2021-05-12 | 中慧医学成像有限公司 | 超音波イメージング方法及び超音波イメージング装置 |
| WO2017200515A1 (en) * | 2016-05-16 | 2017-11-23 | Analogic Corporation | 3-d us volume from 2-d images from freehand rotation and/or translation of ultrasound probe |
| CN107689072A (zh) * | 2016-06-12 | 2018-02-13 | 中慧医学成像有限公司 | 一种三维图像成像方法和系统 |
| KR102709896B1 (ko) | 2017-02-23 | 2024-09-26 | 삼성메디슨 주식회사 | 초음파 진단 장치 및 그 제어 방법 |
| US10299764B2 (en) * | 2017-05-10 | 2019-05-28 | General Electric Company | Method and system for enhanced visualization of moving structures with cross-plane ultrasound images |
| CN109171804B (zh) * | 2018-07-13 | 2021-03-09 | 上海深博医疗器械有限公司 | 多模式超声图像处理系统及方法 |
| WO2020012884A1 (ja) * | 2018-07-13 | 2020-01-16 | 古野電気株式会社 | 超音波撮像装置、超音波撮像システム、超音波撮像方法および超音波撮像プログラム |
| CN115175621A (zh) * | 2019-12-31 | 2022-10-11 | 布弗莱运营公司 | 用于修改超声成像平面位置的方法和装置 |
| CN115426954A (zh) * | 2020-04-16 | 2022-12-02 | 皇家飞利浦有限公司 | 用于生成路线图图像的双平面和三维超声图像采集以及相关联的系统和设备 |
| JP7434095B2 (ja) * | 2020-07-29 | 2024-02-20 | キヤノンメディカルシステムズ株式会社 | 超音波診断装置及びプログラム |
| EP4231921A4 (en) | 2020-10-21 | 2024-07-17 | Maui Imaging, Inc. | SYSTEMS AND METHODS FOR TISSUE CHARACTERIZATION USING MULTI-APERTURE ULTRASOUND |
| CN116635162A (zh) | 2020-11-02 | 2023-08-22 | 毛伊图像公司 | 用于改进超声图像质量的系统和方法 |
| WO2022198615A1 (zh) * | 2021-03-26 | 2022-09-29 | 中国科学院深圳先进技术研究院 | 一种双臂机器人穿刺系统标定方法及系统 |
| JP7179907B1 (ja) * | 2021-05-13 | 2022-11-29 | ジーイー・プレシジョン・ヘルスケア・エルエルシー | 装置及びその制御プログラム |
| EP4302699A1 (en) * | 2022-07-04 | 2024-01-10 | Koninklijke Philips N.V. | System and method for processing ultrasound imaging data |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6102865A (en) * | 1996-02-29 | 2000-08-15 | Acuson Corporation | Multiple ultrasound image registration system, method and transducer |
| JP2003190165A (ja) * | 2001-12-18 | 2003-07-08 | Koninkl Philips Electronics Nv | 高フレームレートの拡張視野の超音波撮像システム及び方法 |
| US20050033173A1 (en) * | 2003-08-05 | 2005-02-10 | Von Behren Patrick L. | Extended volume ultrasound data acquisition |
| US20070255137A1 (en) * | 2006-05-01 | 2007-11-01 | Siemens Medical Solutions Usa, Inc. | Extended volume ultrasound data display and measurement |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5782766A (en) | 1995-03-31 | 1998-07-21 | Siemens Medical Systems, Inc. | Method and apparatus for generating and displaying panoramic ultrasound images |
| US5575286A (en) * | 1995-03-31 | 1996-11-19 | Siemens Medical Systems, Inc. | Method and apparatus for generating large compound ultrasound image |
| US5655535A (en) * | 1996-03-29 | 1997-08-12 | Siemens Medical Systems, Inc. | 3-Dimensional compound ultrasound field of view |
| US7837624B1 (en) * | 1998-11-20 | 2010-11-23 | Siemens Medical Solutions Usa, Inc. | Medical diagnostic ultrasound imaging methods for extended field of view |
| US6554770B1 (en) * | 1998-11-20 | 2003-04-29 | Acuson Corporation | Medical diagnostic ultrasound imaging methods for extended field of view |
| US7756304B2 (en) * | 1998-12-30 | 2010-07-13 | Siemens Medical Solutions Usa, Inc. | Medical diagnostic ultrasonic imaging method and system for displaying multi-phase, multi-frame images |
| US6238345B1 (en) * | 1999-06-30 | 2001-05-29 | Atl Ultrasound | Image memory for extended field of view ultrasonic diagnostic imaging |
| US6299579B1 (en) * | 1999-06-30 | 2001-10-09 | Atl Ultrasound | Extended field of view ultrasonic diagnostic imaging with image reacquisition |
| JP3752921B2 (ja) * | 1999-10-08 | 2006-03-08 | 株式会社日立製作所 | 超音波像の立体パノラマ画像合成装置 |
| JP2001157677A (ja) * | 1999-12-01 | 2001-06-12 | Hitachi Medical Corp | 超音波診断装置 |
| US6582367B1 (en) * | 2000-09-15 | 2003-06-24 | Koninklijke Philips Electronics N.V. | 2D ultrasonic transducer array for two dimensional and three dimensional imaging |
| US6503201B1 (en) * | 2001-10-03 | 2003-01-07 | Koninklijke Philips Electronics N.V. | Correction of extended field of view images for distortion due to scanhead motion |
| US20040254466A1 (en) * | 2003-06-16 | 2004-12-16 | James Boner | Apparatus and method for real time three-dimensional ultrasound imaging |
| DE602004002806T2 (de) * | 2003-06-25 | 2007-08-23 | Aloka Co. Ltd., Mitaka | Diagnostische ultraschall-bildgebende Vorrichtung mit 2D Schallkopf mit variablen Subarray-Mustern |
| WO2006027899A1 (ja) * | 2004-09-03 | 2006-03-16 | Hitachi Medical Corporation | 超音波撮像装置 |
| JP2006255083A (ja) * | 2005-03-16 | 2006-09-28 | Ge Medical Systems Global Technology Co Llc | 超音波画像生成方法および超音波診断装置 |
| JP4413909B2 (ja) * | 2006-10-05 | 2010-02-10 | 株式会社東芝 | 3次元超音波診断装置 |
| WO2008051639A2 (en) * | 2006-10-25 | 2008-05-02 | Maui Imaging, Inc. | Method and apparatus to produce ultrasonic images using multiple apertures |
| JP5296975B2 (ja) * | 2006-11-20 | 2013-09-25 | 日立アロカメディカル株式会社 | 超音波診断装置 |
-
2009
- 2009-06-02 RU RU2010154468/28A patent/RU2507535C2/ru active
- 2009-06-02 WO PCT/IB2009/052321 patent/WO2009147620A2/en not_active Ceased
- 2009-06-02 US US12/995,191 patent/US8539838B2/en active Active
- 2009-06-02 EP EP09752469A patent/EP2288934A2/en not_active Withdrawn
- 2009-06-02 CN CN200980120741.0A patent/CN102057296B/zh active Active
- 2009-06-02 JP JP2011512261A patent/JP5681623B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6102865A (en) * | 1996-02-29 | 2000-08-15 | Acuson Corporation | Multiple ultrasound image registration system, method and transducer |
| JP2003190165A (ja) * | 2001-12-18 | 2003-07-08 | Koninkl Philips Electronics Nv | 高フレームレートの拡張視野の超音波撮像システム及び方法 |
| US20050033173A1 (en) * | 2003-08-05 | 2005-02-10 | Von Behren Patrick L. | Extended volume ultrasound data acquisition |
| US20070255137A1 (en) * | 2006-05-01 | 2007-11-01 | Siemens Medical Solutions Usa, Inc. | Extended volume ultrasound data display and measurement |
Non-Patent Citations (3)
| Title |
|---|
| E.E. Sauerbrei, Extended field-of-view sonography: utility in clinical practice. May, 1999, Journal of Ultrasound in Medicine. 18(5). 335-341. * |
| E.E. Sauerbrei, Extended field-of-view sonography: utility in clinical practice. May, 1999, Journal of Ultrasound in Medicine. 18(5). 335-341. Руководство по ультразвуковой диагностике/ Под ред. П.Е.С. Пальмера. Всемирная организация здравоохранения, Женева, 2000, с.9-11, с.6-11, 14, 35, 48. * |
| Руководство по ультразвуковой диагностике/ Под ред. П.Е.С. Пальмера. Всемирная организация здравоохранения, Женева, 2000, с.9-11, с.6-11, 14, 35, 48. * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102057296A (zh) | 2011-05-11 |
| RU2010154468A (ru) | 2012-07-20 |
| WO2009147620A3 (en) | 2010-03-18 |
| JP2011521762A (ja) | 2011-07-28 |
| US8539838B2 (en) | 2013-09-24 |
| EP2288934A2 (en) | 2011-03-02 |
| US20110079082A1 (en) | 2011-04-07 |
| CN102057296B (zh) | 2015-08-19 |
| WO2009147620A2 (en) | 2009-12-10 |
| JP5681623B2 (ja) | 2015-03-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2507535C2 (ru) | Визуализация ультразвуковых изображений с расширенным полем обзора с помощью двумерного матричного зонда | |
| RU2519811C2 (ru) | Получение ультразвуковых изображений с расширенным полем зрения с помощью направляемого сканирования с efov | |
| EP0545778B1 (en) | Ultrasonic synthetic aperture diagnostic apparatus | |
| US7828731B2 (en) | Ultrasonographic apparatus, ultrasonographic data processing method, and ultrasonographic data processing program | |
| US20110144495A1 (en) | Perfusion Imaging of a Volume in Medical Diagnostic Ultrasound | |
| US11439368B2 (en) | Acoustic wave processing device, signal processing method for acoustic wave processing device, and program | |
| JP2007513726A (ja) | 浸透、解像度及びフレームレートの自動制御を有する超音波画像診断システム | |
| JP4730125B2 (ja) | 血流画像表示装置 | |
| JP2009131420A (ja) | 超音波画像診断装置 | |
| JP4713862B2 (ja) | 超音波診断装置 | |
| JP4945277B2 (ja) | 超音波診断装置 | |
| JP2001157677A (ja) | 超音波診断装置 | |
| JP5331313B2 (ja) | 超音波診断装置 | |
| EP2610640B1 (en) | Ultrasound system and method for detecting vector information using transmission delays | |
| US8083679B1 (en) | Ultrasonic imaging apparatus | |
| EP3685753B1 (en) | Ultrasound imaging apparatus and method of controlling the same | |
| JP2003190167A (ja) | 超音波診断装置 | |
| JP2010158473A (ja) | 超音波画像診断装置 | |
| JP4789243B2 (ja) | 超音波診断装置 | |
| JP2656477B2 (ja) | 超音波診断装置 | |
| KR20060110462A (ko) | 3차원 초음파 영상의 볼륨데이터 획득 방법 및 그를 위한장치 |