RU2314503C1 - Способ определения вектора силы тяги гиперзвукового прямоточного воздушно-реактивного двигателя с косым срезом сопла по результатам летных испытаний его на гиперзвуковой летающей лаборатории - Google Patents
Способ определения вектора силы тяги гиперзвукового прямоточного воздушно-реактивного двигателя с косым срезом сопла по результатам летных испытаний его на гиперзвуковой летающей лаборатории Download PDFInfo
- Publication number
- RU2314503C1 RU2314503C1 RU2006125560/28A RU2006125560A RU2314503C1 RU 2314503 C1 RU2314503 C1 RU 2314503C1 RU 2006125560/28 A RU2006125560/28 A RU 2006125560/28A RU 2006125560 A RU2006125560 A RU 2006125560A RU 2314503 C1 RU2314503 C1 RU 2314503C1
- Authority
- RU
- Russia
- Prior art keywords
- engine
- angle
- thrust
- vector
- acceleration
- Prior art date
Links
- 239000013598 vector Substances 0.000 title claims abstract description 53
- 238000000034 method Methods 0.000 title claims abstract description 23
- 230000001133 acceleration Effects 0.000 claims abstract description 31
- 238000005259 measurement Methods 0.000 claims abstract description 25
- 230000009471 action Effects 0.000 claims abstract description 11
- 238000012360 testing method Methods 0.000 claims description 10
- 238000002474 experimental method Methods 0.000 claims description 4
- 230000005484 gravity Effects 0.000 claims description 4
- 230000004069 differentiation Effects 0.000 claims description 3
- 239000000126 substance Substances 0.000 abstract 1
- 230000035945 sensitivity Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 238000010276 construction Methods 0.000 description 3
- 238000002485 combustion reaction Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- -1 oXY Chemical class 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 102100039028 Protein SPO16 homolog Human genes 0.000 description 1
- 101150108548 SPO16 gene Proteins 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
Images
Landscapes
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
Изобретение относится к авиадвигателестроению, к испытаниям гиперзвуковых прямоточных воздушно-реактивных двигателей (ГПВРД), и может быть использовано для определения их тяговых характеристик по результатам летных испытаний двигателей на гиперзвуковой летающей лаборатории (ГЛЛ) с большим аэродинамическим качеством. Способ заключается в измерении перегрузки, создаваемой действием силы тяги в полете в строго определенном направлении и внешне траекторных измерений относительной скорости. Для этого измерительную ось акселерометра поворачивают относительно связанной продольной оси oX1 ГЛЛ. Угол наклона измерительной оси выбирают из условия равенства нулю проекции вектора полной аэродинамической силы на эту ось, используя заданные аэродинамические характеристики ГЛЛ с большим аэродинамическим качеством, производя вычисления величины угла. Далее производят измерение перегрузки на ГЛЛ от действия силы тяги двигателя. По результатам внешне траекторных измерений вычисляют ускорение в направлении вектора относительной скорости, на участках свободного полета перед включением двигателя и после его выключения по окончанию работы, на участке работы двигателя после его включения и перед выключением. Затем сравнивают эти ускорения и вычисляют результирующее ускорение, характеризуемое работой двигателя. После этого определяют угол поворота вектора силы тяги для двигателя с косым срезом сопла, с учетом угла поворота вектора силы тяги вычисляют его модуль. Технический результат заключается в определении вектора силы тяги двигателя с учетом поворота вектора тяги, при повышении точности и достоверности определения силы тяги. 2 ил., 1 табл.
Description
Область техники.
Изобретение относится к авиадвигателестроению, а именно к новому направлению в нем - гиперзвуковым прямоточным воздушно-реактивным двигателям (ГПВРД), прежде всего - к определению вектора силы тяги двигателя с косым срезом сопла с учетом поворота вектора силы тяги двигателя по результатам летных испытаний ГПВРД на гиперзвуковой летающей лаборатории (ГЛЛ) с большим аэродинамическим качеством.
Уровень техники.
Модуль и угол поворота вектора силы тяги ГПВРД с косым срезом сопла являются важнейшими тяговыми характеристиками двигателей и летно-техническими характеристиками ГЛЛ. Серьезным препятствием, ограничивающим возможности определения тяговых характеристик таких двигателей на наземных стендах, является зависимость этих характеристик от условий обтекания ГЛЛ в натурных условиях, а также особенности интеграции двигателя с планером ГЛЛ: вся нижняя поверхность планера от носка до входа в ГПВРД профилируется как воздухозаборник, а кормовая часть от выхода из камеры сгорания до донного среза планера является соплом одностороннего расширения. Разумеется, при установке двигателя на другой планер изменяются не только аэродинамические характеристики ГЛЛ, но и тяговые характеристики ГПВРД. Воспроизведение на стенде реальных условий полета при больших скоростных напорах и высоких температурах технически трудно реализуемо, требует больших экономических затрат и в настоящее время практически невозможно.
Существенное дополнение в методику определения вектора силы тяги двигателя с косым срезом сопла вносит изменение угла поворота вектора в процессе работы двигателя, причем на неизвестную величину. Задача - при проведении летных испытаний измерять силу тяги двигателя с учетом этого угла.
В настоящее время проводятся исследования тяговых характеристик двигателей, обеспечивающих отклонение направления вектора силы тяги. (И.А.Браилко, Ю.М.Клестов, С.Ю.Крашенинников, А.К.Миронов "Экспериментальное и расчетное исследование аэродинамики плоского поворотного сопла с резким изменением контура в горле"; ЦИАМ им. П.И.Баранова, "Аэромеханика и газовая динамика ", №3.)
Проводятся исследования сопел, которые могли бы обеспечить поворот вектора тяги. Один из вариантов - геометрический поворот сопла, который задается системой управления и который может быть достаточно точно измерен. Для сопел с отклонением потока в сверхзвуковой части выявлена зависимость угла направления вектора силы тяги от величины перепада давления. При малых сверхзвуковых перепадах давления на сопле обнаружено существенное превышение эффективного угла направления силы тяги по сравнению с геометрическим углом поворота сверхзвуковых створок сопла. Из-за косого среза выходного сопла и взаимодействия выхлопной струи с внешним потоком, а также с нижней частью корпуса ГЛЛ происходит отклонение струи на выходе из сопла и, соответственно, отклонение вектора силы тяги от оси оХ1; величина угла отклонения может достигать 20÷25°. До настоящего времени измерениям величины этого угла в полете при проведении летных испытаний летательных аппаратов не уделено внимания.
Известен "Стенд для определения вектора тяги двигателя с кососрезанным соплом", патент С2 №2274764 от 20 апреля 2006 г. В предложенной методике модуль вектора силы тяги определяется по показаниям силоизмерителей в направлениях двух ортогональных осей. Направление вектора силы тяги определяется путем геометрических построений фактической схемы испытаний двигателя (наложением проекции двигателя на вычисленный вектор тяги).
Существенным недостатком предложенной методики является то, что она может быть реализована только на стенде. Кроме того, угол поворота определяется путем сложных геометрических построений, что не позволит определить его с высокой точностью.
Известен "Метод измерения тяги реактивного двигателя в реальном масштабе времени", патент ЕР №0342970 А2 от 19 мая 1988 г. В данном методе полная тяга двигателя определяется как разность общей силы, включающей подъемную силу самолета и силу аэродинамического сопротивления с учетом углов атаки и скольжения. Для определения этих составляющих в алгоритме расчетов используется большое количество измеряемых параметров, в том числе и перегрузок, измеряемых с помощью акселерометров.
Существенным недостатком данного метода является большая погрешность, которая обусловлена измерением в полете большого количества параметров, в том числе термодинамических параметров смеси газа: температур, показателей изоэнтропы (k), газовой постоянной (R), с учетом реального состава газа. В этом методе ставится задача определения только модуля вектора силы тяги.
Наиболее близким техническим решением, принятым за прототип, является "Способ измерения тяги в полете гиперзвукового прямоточного воздушно-реактивного двигателя (ГПВРД) непилотируемой гиперзвуковой летающей лаборатории (ГЛЛ)", патент US №2242736 от 20 декабря 2004 г.
В данном способе тяга двигателя определяется по приращению продольного ускорения (вдоль оси oX1), создаваемого за счет действия силы тяги в полете. Для определения тяги двигателя производится разделение сил аэродинамического сопротивления вдоль продольной оси ГЛЛ, земного тяготения и тяги двигателя. С этой целью производится выключение и включение подачи топлива в камеру сгорания в короткие рядом стоящие промежутки времени t1 и t2, которые не превышают 1 с. Силу тяги двигателя определяют по формуле:
RДВ=mлл·ωR,
где mлл - масса ГЛЛ,
ωR - ускорение ГЛЛ при действии силы тяги.
Ускорение ГЛЛ вычисляют по формуле:
ωR=(nхt1-nхt2)·g,
где nх1t и nхt2 - значения продольных перегрузок в моменты времени t1 и t2. Существенным недостатком такой системы измерений с одним акселерометром является невозможность определения угла поворота вектора силы тяги.
Далее, из других недостатков этого способа является также то, что при выключении и включении двигателя нарушается стационарный режим работы двигателя и полета ГЛЛ, в показаниях акселерометра присутствует составляющая перегрузки от силы лобового сопротивления, которая может быть достаточно велика при больших скоростных напорах. Это приводит к необходимости выбирать акселерометр с большим диапазоном измерений, что приведет к дополнительной динамической погрешности, в особенности при определении малой силы тяги. Кроме того, в случае летных испытаний ГЛЛ с большим аэродинамическим качеством выключение и включение двигателя приведет к дополнительным колебаниям ГЛЛ в продольной плоскости (по углу атаки). По показаниям одного такого акселерометра нельзя судить, по какой причине произошло изменение перегрузки: или колебаний угла атаки, или изменений силы тяги двигателя. При повторном выключении-включении двигателя задний фронт предыдущего импульса, т.е. импульса последействия, может быть достаточно продолжительным, что внесет дополнительную погрешность в величину определяемой силы тяги, т.к. импульс тяги и, соответственно, импульс перегрузки при повторном включении будет отсчитываться от остаточного уровня предыдущего импульса, что снижает точность измерений силы тяги в полете гиперзвукового прямоточного воздушно-реактивного двигателя гиперзвуковой летающей лаборатории, в особенности ГЛЛ с большим аэродинамическим качеством.
Раскрытие изобретения.
Технической задачей предлагаемого способа является определение вектора силы тяги гиперзвукового прямоточного воздушно-реактивного двигателя с косым срезом сопла с учетом поворота вектора в процессе непрерывной работы двигателя при проведении летных испытаний гиперзвуковой летающей лаборатории с большим аэродинамическим качеством, повышение точности и достоверности определения силы тяги.
Наиболее простое решение задачи - установить акселерометры по ортогональным связанным осям оХ1 и oY1 ГЛЛ, зафиксировать приращения перегрузок ΔnX1 и ΔnY1, от действия силы тяги двигателя при его включении или выключении, по этим приращениям вычислить поворот и модуль вектора силы тяги по формулам:
Однако в этом случае необходимо устанавливать акселерометры с большим диапазоном измерений, т.к. перегрузки nX1 и nY1 велики за счет больших аэродинамических сил. Тогда при малом угле поворота вектора силы тяги или малом значении модуля вектора величины приращений практически трудно зафиксировать, в особенности величину ΔnY1, что существенно снижает точность определения угла поворота и, соответственно, величину силы тяги. Поэтому предлагается производить измерения в неортогональной системе координат.
Технический результат достигается за счет измерения перегрузки, создаваемой действием силы тяги двигателя в полете в строго определенном направлении, и внешне траекторных измерений относительной скорости.
При определенном повороте измерительной оси акселерометра исключается в его показаниях составляющая от действия суммарных аэродинамических сил и остается составляющая только от силы тяги. Это позволяет использовать акселерометр с меньшим диапазоном измерений, выбранный на диапазон перегрузок только от силы тяги, и за счет этого повысить точность измерений, что особенно важно при определении малой силы тяги. При этом дается формула для вычисления угла поворота измерительной оси (оси чувствительности) в зависимости от аэродинамических характеристик ГЛЛ. Формула получается из условия равенства нулю проекции вектора полной аэродинамической силы, включающей в себя силу лобового сопротивления Q и подъемную силу Y. Это условие принимает вид: - Qcos(α-αD)+Ysin(α-αD)=0, где
α - угол атаки,
αD - угол наклона измерительной оси акселерометра относительно оси оХ1.
Результаты внешнетраекторных измерений позволяют определить линейное ускорение в направлении вектора относительной скорости. Ускорение определяется путем численного дифференцирования скорости на участке свободного полета и на участке работы двигателя. С целью повышения точности и достоверности измерений целесообразно выполнить их: на участке свободного полета - непосредственно перед включением двигателя и после выключения, на участке работы двигателя - непосредственно после включения и перед выключением. На коротком интервале времени значение относительной скорости изменяется практически по линейному закону в зависимости от времени и ускорение от действия аэродинамических сил αаэр. на каждом из рассматриваемых коротких интервалов времени можно считать постоянным. Ускорение, создаваемое двигателем в направлении вектора скорости, определяется как разность между ускорениями на участке работы двигателя и на участке свободного полета. По указанной методике измерений ускорение определяется как на начальном участке, так и на конечном. Важно, что при использовании предложенного способа не нарушается установившийся режим работы двигателя, так как не требуется при этом его кратковременное отключение, модуль и поворот вектора силы тяги определяется как на начальном участке работы двигателя, так и на конечном. С учетом некоторой погрешности из-за отклонения величины ускорения αаэр. может быть дополнительно определен вектор силы тяги на другом промежуточном участке работы двигателя.
Для получения указанного технического результата в предлагаемом способе определения вектора силы тяги гиперзвукового прямоточного воздушно-реактивного двигателя (ГПВРД) с косым срезом сопла по результатам летных испытаний его на гиперзвуковой летающей лаборатории (ГЛЛ), включающем измерение перегрузки на ГЛЛ от действия силы тяги двигателя, согласно изобретению измерительную ось акселерометра поворачивают относительно связанной продольной оси оХ1 ГЛЛ. Угол наклона измерительной оси выбирают из условия равенства нулю проекции вектора полной аэродинамической силы, используя заданные аэродинамические характеристики ГЛЛ с большим аэродинамическим качеством, определяют значение угла по формуле:
αD - угол наклона измерительной оси акселерометра относительно оси oX1 ГЛЛ,
К - аэродинамическое качество.
α - угол атаки.
По результатам внешнетраекторных измерений вычисляют ускорение в направлении вектора относительной скорости, для этого из результатов измерений относительной скорости выбирают значения ее в начале и конце малого интервала времени Δt=1...5 с на участке свободного полета перед включением двигателя и после его выключения по окончанию работы, на участке работы двигателя после его включения и перед выключением, определяют ускорение, используя формулы численного дифференцирования:
где Δt- малый интервал времени (1...5 с),
νi, νj, νi+1, νj+1 - измеренные значения относительной скорости в начале и в конце указанных интервалов времени Δti, Δtj.
Сравнивают эти ускорения и вычисляют результирующее ускорение, характеризуемое работой двигателя, но формуле: 
Определяют угол поворота φ вектора силы тяги для двигателя с косым срезом сопла по формуле:
где nD - измеренное в полете значение перегрузки под углом αD
g - ускорение силы тяжести,
с учетом угла поворота вектора силы тяги вычисляют модуль его по формулам:
первую или вторую формулу используют в зависимости от точности проведенных в летном эксперименте измерений.
Заявляемое решение дает возможность определить в летном эксперименте угол поворота и модуль вектора силы тяги в процессе работы двигателя. Такой способ может быть использован при испытании всех двигателей, в особенности двигателей, в которых выявлена зависимость угла направления вектора силы тяги от величины перепада давления в тракте двигателя.
Перечень чертежей.
Изобретение поясняется чертежами, на которых:
на фиг.1 показана схема ориентации измерительной оси акселерометра, направления векторов силы тяги, относительной скорости и аэродинамических сил в продольной плоскости относительно связанных осей oX1Y1 ГЛЛ:
1 - ГЛЛ, 2 - экспериментальный ГПВРД;
показаны ортогональные системы координат oXY с соответствующими индексами:
oXY - скоростная система координат, ось оХ повернута на угол атаки α, по осям оХ и oY направлены сила лобового сопротивления Q и подъемная сила Y, по оси оХ направлен вектор относительной скорости;
oXpYp - по оси оХр под углом φ направлена сила тяги Р;
oXDYD - по оси оХD под углом αD направлена ось чувствительности акселерометра, вдоль которой равна нулю перегрузка от проекции вектора полной аэродинамической силы;
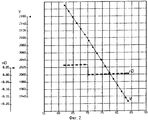
на фиг.2 показаны изменения по времени относительной скорости V и перегрузки nD по оси ХD, в направлении которой равна нулю перегрузка от проекция вектора полной аэродинамической силы.
Предлагаемый способ осуществляют в следующей последовательности.
Способ определения вектора силы тяги гиперзвукового прямоточного воздушно-реактивного двигателя (ГПВРД)2 с косым срезом сопла по результатам летных испытаний его на гиперзвуковой летающей лаборатории (ГЛЛ)1 включает измерение перегрузки на ГЛЛ от действия силы тяги двигателя (схема ориентации измерительной оси акселерометра и действующих на ГЛЛ сил показана на фиг.1) осуществляют в следующей последовательности
- измерительную ось акселерометра поворачивают относительно связанной продольной оси оХ1 ГЛЛ;
- угол наклона измерительной оси выбирают из условия равенства нулю проекции вектора полной аэродинамической силы, используя заданные аэродинамические характеристики ГЛЛ с большим аэродинамическим качеством, определяют значение угла по формуле:
αD - угол наклони измерительной оси акселерометра относительно оси оХ1 ГЛЛ,
К - аэродинамическое качество.
α - угол атаки;
- измеряют перегрузку на ГЛЛ от действия силы тяги двигателя;
- по результатам внешнетраекторных измерений вычисляют ускорение в направлении вектора относительной скорости, для этого из результатов измерений относительной скорости выбирают значения ее в начале и в конце малого интервала времени Δt=1...5 с на участке свободного полета перед включением двигателя и после его выключения по окончанию работы, на участке работы двигателя после его включения и перед выключением, определяют ускорение, используя формулы численного дифференцирования:
где Δt - малый интервал времени (1...5 с),
νi, νJ, νi+1, νJ+1 - измеренные значения относительной скорости в начале и в конце указанных интервалов времени Δti,ΔtJ.
сравнивают эти ускорения и вычисляют результирующее ускорение, характеризуемое работой двигателя, но формуле: 
- определяют угол поворота φ вектора силы тяги для двигателя с косым срезом сопла по формуле:
где nD - измеренное в полете значение перегрузки под углом αD,
g - ускорение силы тяжести,
- с учетом угла поворота вектора силы тяги вычисляют модуль его по формулам:
первую или вторую формулу используют и зависимости от точности проведенных в летном эксперименте измерений.
Пример 1.
Для проверки предложенного способа определения вектора силы тяги двигателя проведена обработка показаний акселерометра и результатов внешнетраекторных измерений относительной скорости, полученных при математическом моделировании пространственного движения ГЛЛ. Используются результаты моделирования траектории на экспериментальном участке (интервал времени 40...70 с). Приняты исходные данные: Р=100 кгс, φ=-20°, G=1451 кг; заданы аэродинамические характеристики ГЛЛ в зависимости от числа М и угла атаки. Представлены результат вычислений угла поворота оси чувствительности акселерометра, результаты математического моделирования пространственного движения ГЛЛ и результаты вычисления дополнительного ускорения в направлении вектора относительной скорости при включении двигателя.
Для рассматриваемой компоновки ГЛЛ получено αD=-24.5°, ось чувствительности - вверх относительно строительной оси ГЛЛ.
Результаты математическою моделирования конечного участка траектории в окрестности момента выключения двигателя (t=70 с) представлены на фиг.2 и в таблице 1; для удобства вычислений принят интервал Δt=1 с.
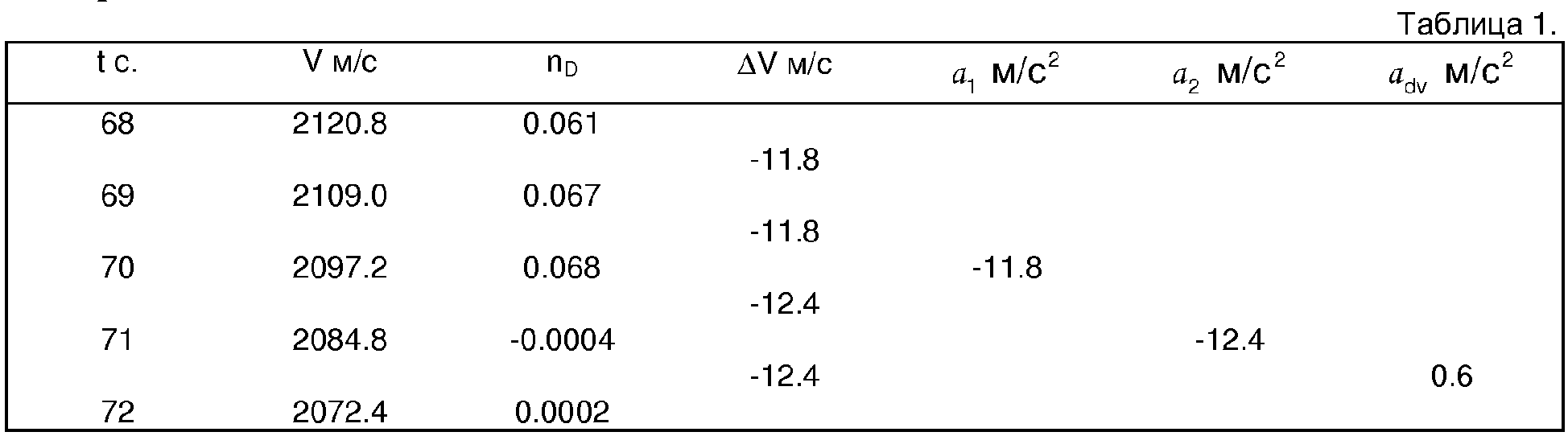
По показаниям акселерометра nD в процессе послеполетной обработки вычисляется ускорение вдоль оси чувствительности акселерометра, а по результатам внешне траекторных измерений - ускорение в направлении вектора скорости. По формуле (5) вычисляется угол поворота вектора силы тяги, а по формулам (6) и (7) - модуль вектора силы тяги. Для представленных результатов моделирования получено φ=-20,5°, Р=99.7 кгс, что практически совпадает с исходными значениями (φ=-20°, Р=100 кгс).
Предложенный способ может быть использован для определения модуля и угла поворота вектора силы тяги по результатам измерений перегрузки и результатам внешнетраекторных измерений при осуществлении полетов летательных аппаратов с прямоточными и ракетными двигателями.
Claims (1)
- Способ определения вектора силы тяги гиперзвукового прямоточного воздушно-реактивного двигателя (ГПВРД) с косым срезом сопла по результатам летных испытаний его на гиперзвуковой летающей лаборатории (ГЛЛ), включающий измерение перегрузки на ГЛЛ от действия силы тяги двигателя, отличающийся тем, что измерительную ось акселерометра поворачивают относительно связанной продольной оси oX1 ГЛЛ, угол наклона измерительной оси выбирают из условия равенства нулю проекции вектора полной аэродинамической силы, используя заданные аэродинамические характеристики ГЛЛ с большим аэродинамическим качеством, определяют значение угла по формуле
 где αD - угол наклона измерительной оси акселерометра относительно оси oX1 ГЛЛ;K - аэродинамическое качество;α - угол атаки,по результатам внешнетраекторных измерений вычисляют ускорение в направлении вектора относительной скорости, для этого из результатов измерений относительной скорости выбирают значения ее в начале и в конце малого интервала времени Δt=1...5 с на участке свободного полета перед включением двигателя и после его выключения по окончании работы, на участке работы двигателя после его включения и перед выключением, определяют ускорение, используя формулы численного дифференцирования
где αD - угол наклона измерительной оси акселерометра относительно оси oX1 ГЛЛ;K - аэродинамическое качество;α - угол атаки,по результатам внешнетраекторных измерений вычисляют ускорение в направлении вектора относительной скорости, для этого из результатов измерений относительной скорости выбирают значения ее в начале и в конце малого интервала времени Δt=1...5 с на участке свободного полета перед включением двигателя и после его выключения по окончании работы, на участке работы двигателя после его включения и перед выключением, определяют ускорение, используя формулы численного дифференцирования
 где Δt - малый интервал времени (1-5 с),νi, νj, νi+1, νj+1 - измеренные значения относительной скорости в начале и в конце указанных интервалов времени Δti, Δtj,сравнивают эти ускорения и вычисляют результирующее ускорение, характеризуемое работой двигателя, по формуле
где Δt - малый интервал времени (1-5 с),νi, νj, νi+1, νj+1 - измеренные значения относительной скорости в начале и в конце указанных интервалов времени Δti, Δtj,сравнивают эти ускорения и вычисляют результирующее ускорение, характеризуемое работой двигателя, по формуле определяют угол поворота φ вектора силы тяги для двигателя с косым срезом сопла по формуле
определяют угол поворота φ вектора силы тяги для двигателя с косым срезом сопла по формуле где nD - измеренное в полете значение перегрузки под углом αD,g - ускорение силы тяжести,с учетом угла поворота вектора силы тяги вычисляют модуль его по формулам
где nD - измеренное в полете значение перегрузки под углом αD,g - ускорение силы тяжести,с учетом угла поворота вектора силы тяги вычисляют модуль его по формулам
 первую или вторую формулу используют в зависимости от точности проведенных в летном эксперименте измерении.
первую или вторую формулу используют в зависимости от точности проведенных в летном эксперименте измерении.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2006125560/28A RU2314503C1 (ru) | 2006-07-18 | 2006-07-18 | Способ определения вектора силы тяги гиперзвукового прямоточного воздушно-реактивного двигателя с косым срезом сопла по результатам летных испытаний его на гиперзвуковой летающей лаборатории |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2006125560/28A RU2314503C1 (ru) | 2006-07-18 | 2006-07-18 | Способ определения вектора силы тяги гиперзвукового прямоточного воздушно-реактивного двигателя с косым срезом сопла по результатам летных испытаний его на гиперзвуковой летающей лаборатории |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU2314503C1 true RU2314503C1 (ru) | 2008-01-10 |
Family
ID=39020240
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2006125560/28A RU2314503C1 (ru) | 2006-07-18 | 2006-07-18 | Способ определения вектора силы тяги гиперзвукового прямоточного воздушно-реактивного двигателя с косым срезом сопла по результатам летных испытаний его на гиперзвуковой летающей лаборатории |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2314503C1 (ru) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2364846C1 (ru) * | 2008-03-14 | 2009-08-20 | Федеральное государственное унитарное предприятие "Летно-исследовательский институт имени М.М. Громова" | Способ автоматизированной оценки в полете суммарной тяги двигателей летательного аппарата |
| RU2445599C1 (ru) * | 2010-12-03 | 2012-03-20 | Федеральное государственное унитарное предприятие "Летно-исследовательский институт имени М.М. Громова" | Способ определения угла поворота вектора силы тяги гиперзвукового прямоточного воздушно-реактивного двигателя с косым срезом сопла по результатам летных испытаний его на гиперзвуковой летающей лаборатории |
| RU2503941C1 (ru) * | 2012-07-09 | 2014-01-10 | Открытое акционерное общество "Лётно-исследовательский институт имени М.М. Громова" | Способ определения аэродинамических коэффициентов cx и сy на основе определения суммарной тяги двигательной установки по результатам летных испытаний летательного аппарата |
| RU2610329C1 (ru) * | 2015-10-23 | 2017-02-09 | Федеральное государственное унитарное предприятие "Центральный институт авиационного моторостроения им. П.И. Баранова" | Способ испытания высокоскоростного летательного аппарата |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0342970A2 (en) * | 1988-05-19 | 1989-11-23 | Control Data Canada Limited | Method & apparatus for real-time measurement of the net thrust of a jet engine |
| RU2059252C1 (ru) * | 1993-07-09 | 1996-04-27 | Казанский государственный технический университет им.А.Н.Туполева | Способ определения вертикальной скорости объекта и устройство для его осуществления |
| RU2242736C2 (ru) * | 2003-02-26 | 2004-12-20 | Федеральное государственное унитарное предприятие "Центральный институт авиационного моторостроения им. П.И. Баранова" | Способ измерения тяги в полете гиперзвукового прямоточного воздушно-реактивного двигателя (гпврд) непилотируемой гиперзвуковой летающей лаборатории (глл) |
| RU2274764C2 (ru) * | 2003-12-16 | 2006-04-20 | Федеральное государственное унитарное предприятие "Московский институт теплотехники" | Стенд для определения вектора тяги двигателя с кососрезанным соплом |
-
2006
- 2006-07-18 RU RU2006125560/28A patent/RU2314503C1/ru not_active IP Right Cessation
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0342970A2 (en) * | 1988-05-19 | 1989-11-23 | Control Data Canada Limited | Method & apparatus for real-time measurement of the net thrust of a jet engine |
| RU2059252C1 (ru) * | 1993-07-09 | 1996-04-27 | Казанский государственный технический университет им.А.Н.Туполева | Способ определения вертикальной скорости объекта и устройство для его осуществления |
| RU2242736C2 (ru) * | 2003-02-26 | 2004-12-20 | Федеральное государственное унитарное предприятие "Центральный институт авиационного моторостроения им. П.И. Баранова" | Способ измерения тяги в полете гиперзвукового прямоточного воздушно-реактивного двигателя (гпврд) непилотируемой гиперзвуковой летающей лаборатории (глл) |
| RU2274764C2 (ru) * | 2003-12-16 | 2006-04-20 | Федеральное государственное унитарное предприятие "Московский институт теплотехники" | Стенд для определения вектора тяги двигателя с кососрезанным соплом |
Non-Patent Citations (1)
| Title |
|---|
| Браилко И.А., Клестов Ю.М., Крашенинников С.Ю., Миронов А.К. Экспериментальное и расчетное исследование аэродинамики плоского поворотного сопла с резким изменением контура в горле/ ЦИАМ им. П.И.Баранова. - Аэромеханика и газовая динамика, №3. * |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2364846C1 (ru) * | 2008-03-14 | 2009-08-20 | Федеральное государственное унитарное предприятие "Летно-исследовательский институт имени М.М. Громова" | Способ автоматизированной оценки в полете суммарной тяги двигателей летательного аппарата |
| RU2445599C1 (ru) * | 2010-12-03 | 2012-03-20 | Федеральное государственное унитарное предприятие "Летно-исследовательский институт имени М.М. Громова" | Способ определения угла поворота вектора силы тяги гиперзвукового прямоточного воздушно-реактивного двигателя с косым срезом сопла по результатам летных испытаний его на гиперзвуковой летающей лаборатории |
| RU2503941C1 (ru) * | 2012-07-09 | 2014-01-10 | Открытое акционерное общество "Лётно-исследовательский институт имени М.М. Громова" | Способ определения аэродинамических коэффициентов cx и сy на основе определения суммарной тяги двигательной установки по результатам летных испытаний летательного аппарата |
| RU2610329C1 (ru) * | 2015-10-23 | 2017-02-09 | Федеральное государственное унитарное предприятие "Центральный институт авиационного моторостроения им. П.И. Баранова" | Способ испытания высокоскоростного летательного аппарата |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6273370B1 (en) | Method and system for estimation and correction of angle-of-attack and sideslip angle from acceleration measurements | |
| US6253166B1 (en) | Stable algorithm for estimating airdata from flush surface pressure measurements | |
| US6807468B2 (en) | Method for estimating wind | |
| RU2445599C1 (ru) | Способ определения угла поворота вектора силы тяги гиперзвукового прямоточного воздушно-реактивного двигателя с косым срезом сопла по результатам летных испытаний его на гиперзвуковой летающей лаборатории | |
| Wang et al. | Retrospective and recent examples of aircraft parameter identification at NASA Dryden Flight Research Center | |
| Bollay | Aerodynamic stability and automatic control: The fourteenth wright brothers lecture | |
| CN111350616B (zh) | 一种无约束条件下固体发动机微小推力偏心测量的方法 | |
| RU2314503C1 (ru) | Способ определения вектора силы тяги гиперзвукового прямоточного воздушно-реактивного двигателя с косым срезом сопла по результатам летных испытаний его на гиперзвуковой летающей лаборатории | |
| CN106125571B (zh) | 一种巡航导弹的速度控制建模方法 | |
| RU2364846C1 (ru) | Способ автоматизированной оценки в полете суммарной тяги двигателей летательного аппарата | |
| RU2347193C1 (ru) | Способ определения углов атаки и скольжения при летных испытаниях гиперзвукового летательного аппарата | |
| RU2324156C2 (ru) | Способ определения силы тяги гиперзвукового прямоточного воздушно-реактивного двигателя по результатам летных испытаний его на гиперзвуковой летающей лаборатории | |
| RU2242736C2 (ru) | Способ измерения тяги в полете гиперзвукового прямоточного воздушно-реактивного двигателя (гпврд) непилотируемой гиперзвуковой летающей лаборатории (глл) | |
| Oliveira et al. | Output error method and two step method for aerodynamic model identification | |
| Lyu et al. | A novel integrated navigation system based on the quadrotor dynamic model | |
| RU2579796C1 (ru) | Способ определения тяги двигателей самолета | |
| Siu et al. | Flight test results of an angle of attack and angle of sideslip calibration method using Output-Error optimization | |
| Raab | Rapid aerodynamic parameter identification on a large transport aircraft | |
| RU2790358C1 (ru) | Способ определения аэродинамических характеристик летательного аппарата по результатам летного эксперимента | |
| Gray | An investigation of open-loop and inverse simulation as nonlinear model validation tools for helicopter flight mechanics | |
| Shaw et al. | An experimental investigation of a highly underexpanded sonic jet ejecting from a flat plate into a subsonic crossflow | |
| Franze | SHEFEX II-a first aerodynamic and atmospheric post-flight analysis | |
| Nusrath et al. | Drag assessment of a high performance aircraft using system identification techniques | |
| Lauten et al. | Continuation of wing flutter investigation in the transonic range and presentation of a limited summary of flutter data | |
| RU2503941C1 (ru) | Способ определения аэродинамических коэффициентов cx и сy на основе определения суммарной тяги двигательной установки по результатам летных испытаний летательного аппарата |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PC43 | Official registration of the transfer of the exclusive right without contract for inventions |
Effective date: 20120827 |
|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20150719 |