RU2242019C2 - Способ определения координат удаленного объекта на местности и устройство для его осуществления - Google Patents
Способ определения координат удаленного объекта на местности и устройство для его осуществленияInfo
- Publication number
- RU2242019C2 RU2242019C2 RU2002117002/28A RU2002117002A RU2242019C2 RU 2242019 C2 RU2242019 C2 RU 2242019C2 RU 2002117002/28 A RU2002117002/28 A RU 2002117002/28A RU 2002117002 A RU2002117002 A RU 2002117002A RU 2242019 C2 RU2242019 C2 RU 2242019C2
- Authority
- RU
- Russia
- Prior art keywords
- observer
- coordinates
- sensors
- ordinates
- terrain
- Prior art date
Links
Images
Landscapes
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
Изобретения относятся к области приборостроения, в частности к дистанционным измерителям координат объектов на местности. Способ включает измерение координат объекта, координат наблюдателя и передачу их по каналам связи для дальнейшего использования. Наблюдатель производит сканирование местности через визирное устройство до попадания на линию визирования соответствующего объекта с фиксацией в этот момент показаний датчиков вертикали, азимута, угла места, устройства определения собственных координат наблюдателя. Полученные данные направляют в устройство управления и вычислений. По полученным собственным координатам наблюдателя устанавливают его точку нахождения в пространстве цифровой модели рельефа местности. По остальным показаниям датчиков восстанавливают положение линии визирования над цифровой моделью рельефа. Определяют дальность до объекта как расстояние от точки нахождения наблюдателя на цифровой модели рельефа до точки пересечения восстановленной линии визирования и цифровой модели рельефа. Устройство содержит датчики местоположения и ориентации, устройство управления и вычислений, приемопередатчики, устройство визирования, которое соединено с датчиками определения вертикали, азимута, угла места. Выходы датчиков определения вертикали, азимута, угла места и выход устройства определения собственных координат наблюдателя соединены с входами устройства управления и вычислений. Устройство управления и вычислений содержит блок памяти, который имеет цифровую модель рельефа местности наблюдения, и соединено с приемопередатчиком. Устройство определения собственных координат наблюдателя имеет собственную навигационную аппаратуру. Технический результат состоит в повышении надежности работы и упрощении устройства определения координат, отсутствии демаскирующих оператора факторов. 2 н. и 2 з.п. ф-лы, 2 ил.
Description
Изобретение относится к приборостроению, в частности дистанционным измерителям координат объектов на местности.
Известна (см., напр., патент РФ №2123165) оптико-лазерная система для прицеливания и дальнометрирования воздушных целей. Система состоит из лазерного излучателя с блоком накачки и приемника излучения, входящих в состав оптической следящей системы, и дальномерного канала, а также блока вычислений. При этом прицельная следящая система содержит зеркало, установленное с возможностью поворота, положение которого определяется по сигналу, вырабатываемому блоком вычислений. Для уменьшения расходимости луча используется телескопический объектив.
Недостатком системы является ее сравнительно узкое применение - в основном для ракет класса “воздух-воздух” и, тем самым, невозможность использования с позиций на местности для поиска и локализации объектов как наземных, так и воздушных в определенной системе координат. Кроме того, весь комплекс является довольно сложным и дорогостоящим.
Известна оптико-электронная система поиска и сопровождения цели (патент РФ №2155323), которая содержит подвижное зеркало с датчиком углов и приводами, спектроделительный фильтр, пеленгационный канал, формирующий сигнал рассогласования между оптической осью системы и направлением на цель, а также передающий и приемный лазерные каналы. В режиме поиска просмотр пространства целей осуществляется подвижным зеркалом по сигналам рассогласования между информациями пеленгационного канала и внешней системой целеуказания. Сигнал рассогласования между оптической осью системы и направлением на цель по двум координатам - азимуту и высоте подается на приводы подвижного зеркала, приводя изображение цели в центр поля зрения чувствительных площадок. Далее производится переход в режим слежения и дальнометрирования.
Недостатком системы является возможность ее использования только для оружия с лазерным наведением, а также необходимость использования в ней сложных дорогостоящих оптических систем.
Наиболее близким к изобретению является автоматизированная система управления наведения и огнем боевой машины реактивной системы залпового огня (патент РФ №2167380). Для ее работы используется автономная топогеодезическая привязка и ориентирование боевой машины, автономный расчет установок стрельбы и данных полетного задания по координатам точек прицеливания, бесприцельное наведение пакета направляющих. Система автономного ориентирования определяет начальный азимут, а навигационная аппаратура - начальные координаты боевой машины. После этого система навигации непрерывно определяет местоположение и ориентацию боевой машины, отображаемые системой, на фоне топографической карты. После получения целеуказания через блок приема-передачи данных система также отображает дальность до цели и направление заезда на стартовую позицию. На стартовой позиции система определяет заданные углы наведения для текущих координат боевой машины. Система непрерывно определяет рассогласования их с текущими углами наведения. Приводы наведения по этим рассогласованиям осуществляют наведение пакета направляющих.
Недостатком данной системы является ее сложность, высокая стоимость, ограниченность применения.
Задачей для предлагаемого изобретения является создание простого, надежного и недорогого прибора для определения дальности, азимута и угла места удаленного объекта без применения дистанционного излучающего зондирования, приборов, устройств и методов их применения, демаскирующих оператора.
Техническим результатом изобретения является построение простой и надежной в применении системы определения координат удаленного объекта без применения демаскирующих факторов довольно широкого использования.
Технический результат достигается тем, что в способе определения координат удаленного объекта на местности, заключающемся в измерении координат объекта, координат наблюдателя и передачи их для дальнейшего использования, наблюдатель производит сканирование местности через визирное устройство до попадания на линию визирования соответствующего объекта с фиксацией в этот момент показаний датчиков вертикали, азимута, угла места, а также устройства определения собственных координат наблюдателя, данные от которых направляют в устройство управления и вычислений, имеющее блок памяти, содержащий цифровую модель рельефа местности наблюдения, по полученным собственным координатам наблюдателя устанавливают точку его нахождения в пространстве на или над цифровой моделью рельефа местности, а по остальным показаниям датчиков восстанавливают положение линии визирования над цифровой моделью рельефа, и определяют дальность до объекта как расстояние от точки нахождения наблюдателя на цифровой модели рельефа до точки пересечения восстановленной линии визирования и цифровой модели рельефа.
Кроме того, в устройство определения координат удаленного объекта на местности, содержащее датчики местоположения и ориентации, устройство управления и вычислений, приемопередатчики, введено устройство визирования, которое соединено с датчиками определения вертикали, азимута, угла места, выходы которых и выход устройства определения собственных координат наблюдателя соединены с входами устройства управления и вычислений, имеющего блок памяти, который содержит цифровую модель рельефа местности наблюдения, причем устройство управления и вычислений соединено с приемопередатчиком, а устройство определения собственных координат наблюдателя имеет собственную навигационную аппаратуру.
Технический эффект достигается также и тем, что в качестве устройства визирования использован прицел стрелкового оружия, а датчики вертикали, азимута, угла места смонтированы на корпусе стрелкового оружия, устройство же определения собственных координат наблюдателя и устройство управления и вычислений введены в состав экипировки наблюдателя, причем устройство управления и вычислений подключено к его индивидуальному приемопередатчику.
Кроме того, в качестве устройства визирования использована оптическая ось порогового датчика, установленного на дистанционно пилотируемом летательном аппарате, датчики вертикали, азимута, угла места, устройство определения собственных координат наблюдателя смонтированы на нем же с возможностью вести сканирование в плоскости, перпендикулярной направлению полета, и фиксировать положение линии визирования при превышении порогового значения излучения, а устройство управления и вычислений находится на земле с возможностью связи между ним и датчиками, а также устройством определения собственных координат наблюдателя с помощью приемопередатчиков.
Тем самым появляется возможность определения собственных координат наблюдателя и направления на объект, переноса этих данных в вычислительный блок и вычисления дальности с применением цифровой модели рельефа и таким образом определения всех необходимых координат удаленного объекта. При этом используемое средство является простым, надежным, дешевым и вместе с тем обеспечивает требуемую точность локализации объекта. Кроме того, из прибора удается исключить сложный, дорогостоящий и демаскирующий наблюдателя лазерный дальномер.
На фиг.1 дан в схематичном виде рисунок визирного устройства.
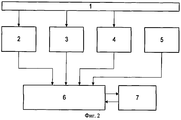
На фиг.2 показана блок-схема прибора для определения координат удаленного объекта на местности.
Прибор содержит устройство визирования 1 и датчики его положения в пространстве, а именно: устройство определения вертикали 2, устройство автоматического съема азимута 3, устройство автоматического съема угла места 4, устройства определения собственных координат наблюдателя 5, данные от которых поступают на обработку в устройство управления и вычислений 6 с цифровой моделью рельефа в памяти устройства управления и вычислений 6, в качестве которого может быть использован соответствующий микропроцессор. При этом устройство определения собственных координат наблюдателя 5 имеет спутниковую навигационную аппаратуру. Устройство управления и вычислений 6 своим входом и выходом соединено с приемопередатчиком в системе наблюдателя 7. Сканирование местности производят с помощью устройства приема изображения 8.
Заявленная система определения координат удаленного объекта на местности работает следующим образом.
Для определения координат удаленного объекта наблюдатель с помощью устройства приема изображения 8 производит сканирование местности через визирное устройство 1 до тех пор, пока на линии визирования А не будет зафиксирован удаленный объект, координаты которого требуется определить. В этот момент производится фиксирование показаний всех датчиков 2, 3, 4, 5, и передача данных от них в блок 6. По полученным собственным координатам устройства 5 устанавливают точку нахождения наблюдателя в пространстве цифровой модели рельефа наблюдаемой местности устройства управления и вычислений 6, а по измеренным датчиками 2, 3, 4 углам восстанавливают положение линии визирования А над цифровой моделью рельефа наблюдаемой местности устройства управления и вычислений 6 и вычисляют дальность до объекта как точки пересечения восстановленной линии визирования и цифровой модели рельефа. Координаты объекта вычисляются устройством 6 по полному набору полярных координат или как координаты точки пересечения восстановленной линии визирования с цифровой моделью рельефа. Приемопередатчик 7 служит для связи наблюдателя с центральным пунктом управления и передачи полученных данных наблюдения.
Примеры применения предлагаемого изобретения.
В качестве устройства визирования 1 используется прицел стрелкового оружия, например автомата. Датчики 2, 3, 4 смонтированы на нем же. В состав датчиков 3 и 4 входят две компоненты: микромеханическая компонента позволяет зафиксировать, непродолжительное время сохранять с необходимой точностью направление на выбранный на местности или созданный искусственно репер (ориентир), и составляющая, измеряющая относительный угол между целью и репером (ориентиром).
Устройства 5, 6 входят в состав экипировки бойца-наблюдателя, и устройство 6 подключено к его индивидуальной радиостанции. Такой боец-наблюдатель способен передавать целеуказания и практически не отличим от других солдат.
В качестве устройства визирования 1 используется оптическая ось порогового, например, инфракрасного датчика, установленного на дистанционно пилотируемом летательном аппарате. Датчики 2, 3, 4, 5 смонтированы на нем же и позволяют осуществлять сканирование в плоскости, перпендикулярной направлению полета, и фиксировать положение линии визирования при превышениях порогового значения излучения. Устройство 6 расположено на земле. Такое устройство, в частности, является технической основой для организации дешевого мониторинга пожароопасных участков и раннего оповещения об очагах пожаров, если применен пороговый датчик инфракрасного излучения.
Тем самым при фиксировании в поле наблюдения прибора объекта наблюдения появляется возможность провести без излучения каких-либо измерительных сигналов, то есть без демаскировки наблюдателя, измерение углов на наблюдаемый объект и вычисление координат объекта с использованием наряду с устройством визирования 1 блока управления и вычислений 6.
Claims (4)
1. Способ определения координат удаленного объекта на местности, заключающийся в измерении координат объекта, координат наблюдателя и передачи их по каналам связи для дальнейшего использования, отличающийся тем, что наблюдатель производит сканирование местности через визирное устройство до попадания на линию визирования соответствующего объекта с фиксацией в этот момент показаний датчиков вертикали, азимута, угла места, а также устройства определения собственных координат наблюдателя, данные от которых направляют в устройство управления и вычислений, имеющего блок памяти, содержащий цифровую модель рельефа местности наблюдения, по полученным собственным координатам наблюдателя устанавливают его точку нахождения в пространстве цифровой модели рельефа местности, а по остальным показаниям датчиков восстанавливают положение линии визирования над цифровой моделью рельефа, и определяют дальность до объекта как расстояние от точки нахождения наблюдателя на цифровой модели рельефа до точки пересечения восстановленной линии визирования и цифровой модели рельефа.
2. Устройство определения координат удаленного объекта на местности, содержащее датчики местоположения и ориентации, устройство управления и вычислений, приемопередатчики, отличающееся тем, что в него введено устройство визирования, которое соединено с датчиками определения вертикали, азимута, угла места, выходы которых и выход устройства определения собственных координат наблюдателя соединены с входами устройства управления и вычислений, имеющего блок памяти, который содержит цифровую модель рельефа местности наблюдения, причем устройство управления и вычислений соединено с приемопередатчиком, а устройство определения собственных координат наблюдателя имеет собственную навигационную аппаратуру.
3. Устройство по п.2, отличающееся тем, что в качестве устройства визирования использован прицел стрелкового оружия, а датчики вертикали, съема азимута, съема угла места смонтированы на его корпусе, устройство же определения собственных координат наблюдателя и устройство управления и вычислений введены в состав экипировки наблюдателя.
4. Устройство по п.2, отличающееся тем, что для визирования использована оптическая ось порогового датчика, установленного на дистанционно пилотируемом летательном аппарате, датчики вертикали, съема азимута, угла места, устройство определения собственных координат наблюдателя смонтированы на нем же с возможностью вести сканирование в плоскости, перпендикулярной направлению полета, и фиксировать положение линии визирования при превышении порогового значения излучения, а устройство управления и вычислений находится на земле с возможностью связи между ним и датчиками, а также устройством определения собственных координат наблюдателя.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2002117002/28A RU2242019C2 (ru) | 2002-06-26 | 2002-06-26 | Способ определения координат удаленного объекта на местности и устройство для его осуществления |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2002117002/28A RU2242019C2 (ru) | 2002-06-26 | 2002-06-26 | Способ определения координат удаленного объекта на местности и устройство для его осуществления |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2002117002A RU2002117002A (ru) | 2004-02-20 |
| RU2242019C2 true RU2242019C2 (ru) | 2004-12-10 |
Family
ID=34387087
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2002117002/28A RU2242019C2 (ru) | 2002-06-26 | 2002-06-26 | Способ определения координат удаленного объекта на местности и устройство для его осуществления |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2242019C2 (ru) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2468382C1 (ru) * | 2011-05-24 | 2012-11-27 | Открытое Акционерное Общество "Производственное Объединение "Уральский Оптико-Механический Завод" Имени Э.С. Яламова" (Оао "По "Уомз") | Способ формирования сигнала управления в следящей системе |
| RU2667167C1 (ru) * | 2017-10-19 | 2018-09-17 | Акционерное общество "Научно-производственное предприятие "Дельта" | Способ коррекции артиллерийских снарядов |
| RU2695041C1 (ru) * | 2018-08-27 | 2019-07-18 | Публичное акционерное общество "Ракетно-космическая корпорация "Энергия" имени С.П. Королёва" | Способ ориентирования перемещаемой на борту пилотируемого корабля аппаратуры |
| RU2695046C1 (ru) * | 2018-08-07 | 2019-07-18 | Публичное акционерное общество "Ракетно-космическая корпорация "Энергия" имени С.П. Королёва" | Способ ориентирования перемещаемой на борту пилотируемого корабля аппаратуры |
| RU2695254C1 (ru) * | 2018-08-09 | 2019-07-22 | Публичное акционерное общество "Ракетно-космическая корпорация "Энергия" имени С.П. Королёва" | Система ориентирования перемещаемой на борту пилотируемого корабля аппаратуры |
| RU2695960C1 (ru) * | 2018-08-21 | 2019-07-29 | Публичное акционерное общество "Ракетно-космическая корпорация "Энергия" имени С.П. Королёва" | Система ориентирования перемещаемой на борту пилотируемого корабля аппаратуры |
-
2002
- 2002-06-26 RU RU2002117002/28A patent/RU2242019C2/ru not_active IP Right Cessation
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2468382C1 (ru) * | 2011-05-24 | 2012-11-27 | Открытое Акционерное Общество "Производственное Объединение "Уральский Оптико-Механический Завод" Имени Э.С. Яламова" (Оао "По "Уомз") | Способ формирования сигнала управления в следящей системе |
| RU2667167C1 (ru) * | 2017-10-19 | 2018-09-17 | Акционерное общество "Научно-производственное предприятие "Дельта" | Способ коррекции артиллерийских снарядов |
| RU2695046C1 (ru) * | 2018-08-07 | 2019-07-18 | Публичное акционерное общество "Ракетно-космическая корпорация "Энергия" имени С.П. Королёва" | Способ ориентирования перемещаемой на борту пилотируемого корабля аппаратуры |
| RU2695254C1 (ru) * | 2018-08-09 | 2019-07-22 | Публичное акционерное общество "Ракетно-космическая корпорация "Энергия" имени С.П. Королёва" | Система ориентирования перемещаемой на борту пилотируемого корабля аппаратуры |
| RU2695960C1 (ru) * | 2018-08-21 | 2019-07-29 | Публичное акционерное общество "Ракетно-космическая корпорация "Энергия" имени С.П. Королёва" | Система ориентирования перемещаемой на борту пилотируемого корабля аппаратуры |
| RU2695041C1 (ru) * | 2018-08-27 | 2019-07-18 | Публичное акционерное общество "Ракетно-космическая корпорация "Энергия" имени С.П. Королёва" | Способ ориентирования перемещаемой на борту пилотируемого корабля аппаратуры |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2002117002A (ru) | 2004-02-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10209342B2 (en) | Electromagnetic radiation source locating system | |
| CN111417952B (zh) | 具有网络连接瞄准镜以允许多个装置同时跟踪目标的装置 | |
| US8020769B2 (en) | Handheld automatic target acquisition system | |
| US10408574B2 (en) | Compact laser and geolocating targeting system | |
| US20070103671A1 (en) | Passive-optical locator | |
| US8868342B2 (en) | Orientation device and method | |
| US5034812A (en) | Image processing utilizing an object data store to determine information about a viewed object | |
| EP1949016B1 (en) | Precision targeting | |
| US6281841B1 (en) | Direction determining apparatus | |
| CN102749659B (zh) | 一种多功能光电侦察仪及其用于观察确定目标位置的方法 | |
| US6388611B1 (en) | Method and system for dynamic surveillance of a remote object using GPS | |
| JP2001518627A (ja) | 無線周波干渉計およびレーザ距離計/指示装置をベースとするターゲティング・システム | |
| CN104457744A (zh) | 手持目标侦测仪及其侦测方法和弹道解算方法 | |
| CN204388861U (zh) | 手持目标侦测仪 | |
| KR20210133972A (ko) | 타겟을 여러 다른 디바이스에서 동시에 추적할 수 있도록 네트워크로 연결된 스코프가 있는 차량 탑재 장치 | |
| KR100963680B1 (ko) | 원격 표적의 좌표 측정 장치 및 방법 | |
| RU2242019C2 (ru) | Способ определения координат удаленного объекта на местности и устройство для его осуществления | |
| RU2247921C2 (ru) | Способ ориентирования на местности и устройство для его осуществления | |
| US10288738B1 (en) | Precision mobile baseline determination device and related method | |
| EP4141384B1 (en) | Hand-held observation device and method for obtaining a 3d point cloud | |
| JP2001066097A (ja) | 小火器用照準補助装置 | |
| RU2717138C1 (ru) | Система портативных комплектов для автоматизированного целеуказания на поле боя | |
| US5367333A (en) | Passive range measurement system | |
| RU2324896C1 (ru) | Оптический прибор разведки | |
| RU2167380C2 (ru) | Автоматизированная система управления наведением и огнем боевой машины реактивной системы залпового огня (варианты) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PC41 | Official registration of the transfer of exclusive right |
Effective date: 20121219 |
|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20130627 |