RU183308U1 - A device for studying the law of conservation of the kinetic moment of a mechanical system - Google Patents
A device for studying the law of conservation of the kinetic moment of a mechanical system Download PDFInfo
- Publication number
- RU183308U1 RU183308U1 RU2017146806U RU2017146806U RU183308U1 RU 183308 U1 RU183308 U1 RU 183308U1 RU 2017146806 U RU2017146806 U RU 2017146806U RU 2017146806 U RU2017146806 U RU 2017146806U RU 183308 U1 RU183308 U1 RU 183308U1
- Authority
- RU
- Russia
- Prior art keywords
- frame
- rotor
- kinetic moment
- disk
- electric motor
- Prior art date
Links
- 230000001939 inductive effect Effects 0.000 claims abstract description 4
- 230000033001 locomotion Effects 0.000 description 4
- 239000013598 vector Substances 0.000 description 4
- 238000010586 diagram Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
Images


Classifications
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B23/00—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes
- G09B23/06—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes for physics
- G09B23/08—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes for physics for statics or dynamics
- G09B23/10—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes for physics for statics or dynamics of solid bodies
Landscapes
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Mathematical Analysis (AREA)
- Mathematical Optimization (AREA)
- Algebra (AREA)
- Pure & Applied Mathematics (AREA)
- Educational Administration (AREA)
- Computational Mathematics (AREA)
- Business, Economics & Management (AREA)
- Educational Technology (AREA)
- Theoretical Computer Science (AREA)
- Toys (AREA)
Abstract
Полезная модель относится к учебно-исследовательскому оборудованию по теоретической механике и представляет собой устройство для исследования закона сохранения кинетического момента механической системы. Она содержит основание, установленную в основании с возможностью вращения вокруг вертикальной оси симметричную рамку с вертикальными стойками. В стойках на горизонтальных полуосях закреплен механизм создания кинетического момента, включающий в себя электродвигатель, на выходном валу ротора которого закреплен диск. Устройство снабжено фиксаторами углового положения механизма и соответственно диска с ротором относительно рамки, датчиками угловых скоростей вращения диска с ротором и рамки относительно их осей симметрии, блоком питания датчиков и электродвигателя, а также блоком обработки сигналов датчиков. При этом в качестве датчиков угловых скоростей применены индуктивные датчики, а в качестве блока регистрации и обработки сигналов датчиков применен персональный компьютер с аналого-цифровым преобразователем. 2 з.п. ф-лы, 2 ил.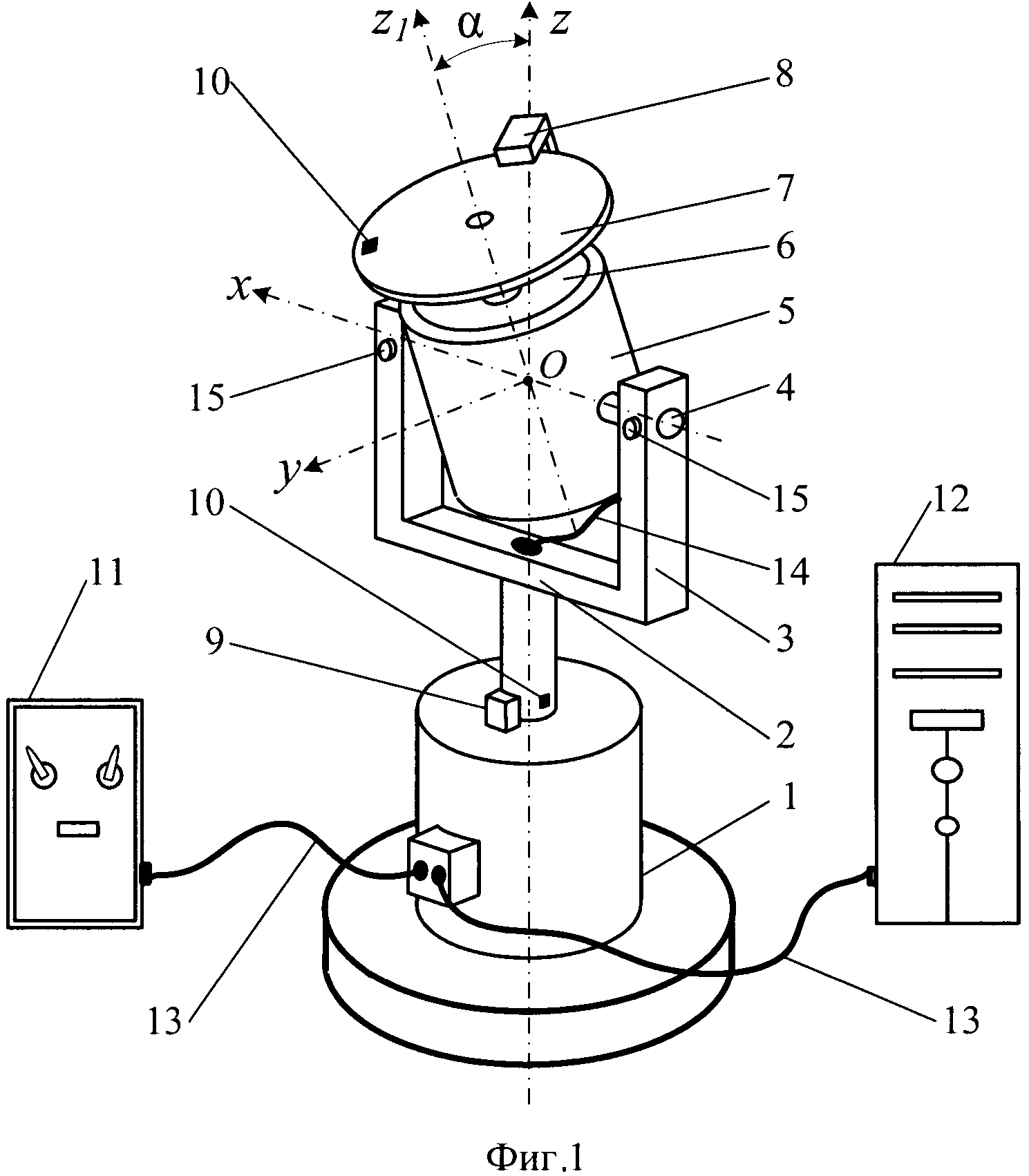
Description
Область техникиTechnical field
Полезная модель относится к учебно-исследовательскому оборудованию по теоретической механике и может быть использована в высших технических учебных заведениях при изучении общих теорем механики и, в частности, закона сохранения кинетического момента (главного момента количеств движения) механической системы.The utility model relates to educational and research equipment in theoretical mechanics and can be used in higher technical schools to study general theorems of mechanics and, in particular, the law of conservation of kinetic moment (the main moment of momentum) of a mechanical system.
Уровень техникиState of the art
Известно устройство для исследования закона сохранения кинетического момента механической системы, содержащее основание, установленную в основании с возможностью вращения вокруг вертикальной оси симметричную рамку с вертикальными стойками, и механизм создания кинетического момента, включающий в себя тело вращения, установленное в корпусе, который посредством горизонтальных полуосей шарнирно закреплен в вертикальных стойках рамки (см. Патент РФ №2017228, кл. G09B 23/06, 1991 г.).A device is known for studying the law of conservation of the kinetic moment of a mechanical system, comprising a base mounted on the base with the possibility of rotation around the vertical axis of a symmetrical frame with vertical struts, and a mechanism for creating a kinetic moment, including a body of revolution mounted in the housing, which is articulated through the horizontal half-axes fixed in vertical racks of the frame (see RF Patent No. 20177228, class G09B 23/06, 1991).
Недостатки этого устройства заключаются в следующем.The disadvantages of this device are as follows.
В указанном устройстве выполнение закона сохранения кинетического момента лишь демонстрируется визуально. В нем не производятся измерения угловых скоростей тела вращения и рамки, т.е. не обеспечивается количественное определение их кинетических моментов и соответственно суммарного кинетического момента всей системы. Это не позволяет экспериментально определять величину указанного момента и его перераспределение между телом вращения и рамкой, в том числе в зависимости от углового положения продольной оси тела относительно оси вращения рамки. По этим причинам в данном устройстве не обеспечивается достаточная информативность, надежность и точность исследования закона сохранения кинетического момента механической системы, что существенно сужает учебные и исследовательские возможности этого устройства.In the specified device, the implementation of the law of conservation of the kinetic moment is only demonstrated visually. It does not measure angular velocities of the body of revolution and frame, i.e. quantitative determination of their kinetic moments and, accordingly, the total kinetic moment of the entire system is not provided. This does not allow experimentally determining the magnitude of the specified moment and its redistribution between the body of revolution and the frame, including depending on the angular position of the longitudinal axis of the body relative to the axis of rotation of the frame. For these reasons, this device does not provide sufficient information, reliability and accuracy of the study of the law of conservation of the kinetic moment of a mechanical system, which significantly reduces the educational and research capabilities of this device.
Раскрытие полезной моделиUtility Model Disclosure
Задачей полезной модели является существенное повышение информативности и точности исследования закона сохранения кинетического момента механической системы путем контролируемого регулирования в широком диапазоне углового положения тела вращения относительно вертикали и его угловой скорости и тем самым величины и направления вектора кинетического момента. А также за счет обеспечения регистрации угловых скоростей тела вращения и рамки посредством датчиков и обработки этих данных с помощью блока регистрации и обработки сигналов датчиков.The objective of the utility model is to significantly increase the information content and accuracy of studying the law of conservation of the kinetic moment of a mechanical system by controlling in a wide range of the angular position of the body of revolution relative to the vertical and its angular velocity, and thereby the magnitude and direction of the vector of kinetic moment. And also due to the registration of angular velocities of the body of revolution and the frame by means of sensors and the processing of these data using the unit for recording and processing sensor signals.
Задача данной полезной модели достигается тем, что устройство для исследования закона сохранения кинетического момента механической системы снабжено электродвигателем, статор которого закреплен в корпусе механизма создания кинетического момента, а ротор электродвигателя применен в качестве тела вращения этого механизма, датчиками угловых скоростей ротора и рамки относительно их осей симметрии, блоком питания датчиков и электродвигателя, а также блоком регистрации и обработки сигналов датчиков, при этом полуоси корпуса механизма снабжены фиксаторами углового положения корпуса и соответственно оси вращения ротора относительно вертикали. Кроме того, на валу ротора, соосно ему, закреплен массивный диск, а в качестве датчиков угловых скоростей рамки и ротора применены индуктивные датчики с постоянными магнитами, закрепленными на рамке и диске соответственно, причем в качестве блока регистрации и обработки сигналов датчиков применен персональный компьютер с аналого-цифровым преобразователем.The objective of this utility model is achieved in that the device for studying the law of conservation of the kinetic moment of a mechanical system is equipped with an electric motor, the stator of which is fixed in the body of the mechanism for creating the kinetic moment, and the rotor of the electric motor is used as the body of rotation of this mechanism, the angular velocity sensors of the rotor and frame relative to their axes symmetry, the power supply of the sensors and the electric motor, as well as the unit for recording and processing the signals of the sensors, while the axis of the housing of the mechanism sn are removed by fixators of the angular position of the housing and, accordingly, the axis of rotation of the rotor relative to the vertical. In addition, a massive disk is fixed on the rotor shaft, coaxially to it, and inductive sensors with permanent magnets mounted on the frame and disk, respectively, are used as angular velocity sensors of the frame and rotor, and a personal computer with analog to digital converter.
Перечень фигурList of figures
На фиг. 1 представлен общий вид устройства.In FIG. 1 shows a General view of the device.
На фиг. 2 показана схема осей координат, угловых скоростей и сил, действующих на устройство.In FIG. 2 shows a diagram of the coordinate axes, angular velocities and forces acting on the device.
Осуществление полезной моделиUtility Model Implementation
Общий вид устройства приведен на фиг. 1 (здесь блок электропитания и блок записи и обработки сигналов датчиков показаны условно).A general view of the device is shown in FIG. 1 (here, the power supply unit and the unit for recording and processing sensor signals are shown conditionally).
Устройство содержит основание 1, в котором с возможностью вращения вокруг вертикальной оси z закреплена симметричная рамка 2 с вертикальными стойками 3. В стойках рамки шарнирно посредством полуосей 4 установлен корпус 5 механизма создания кинетического момента, включающий в себя электродвигатель 6, статор которого закреплен в корпусе механизма, а ротор с закрепленным на нем диском 7 применен в качестве тела вращения этого механизма. Устройство снабжено датчиками 8 и 9 угловых скоростей соответственно ротора и рамки, например индуктивными датчиками с постоянными магнитами 10, закрепленными на диске и рамке, а также блоком 11 питания датчиков и электродвигателя и блоком 12 обработки сигналов датчиков. При этом, в качестве последнего применен персональный компьютер с аналого-цифровым преобразователем. Блоки 11 и 12 соединены кабелями 13 с основанием 1, в котором размещены кольцевые токосьемники (на рис. 1 не показаны) для подвода посредством кабеля 14 напряжения питания к электродвигателю и передачи сигналов датчика 8, которые расположены на вращающейся рамке. Устройство снабжено также фиксаторами 15 полуосей 4, обеспечивающими закрепление корпуса 5 механизма создания кинетического момента при различных значениях угла α между осью z1 вращения ротора электродвигателя с диском 7 и осью z вращения рамки 2 (здесь подвижная система координат Oxyz связана с рамкой).The device comprises a
Работает данное устройство следующим образом.This device works as follows.
Вначале посредством фиксаторов 15 закрепляют в стойках 3 механизм создания кинетического момента при выбранном значении угла а между осями z1 и z в диапазоне от 0° до 90° (см. фиг. 2, где приведена схема устройства при наблюдении навстречу оси Ох по фиг. 1). Затем подают питание на электродвигатель 6 и после разгона его ротора регистрируют угловые скорости вращения диска 7 и рамки 2. В данном случае вращательные движения указанных звеньев устройства начинаются из состояния покоя, когда вектор кинетического момента ![]()
![]()
![]()
![]()
где ![]()
![]()
![]()
![]()
![]()
![]()
Теорема об изменении кинетического момента ![]()
![]()

где 
Из этого равенства в проекции на какую-либо неподвижную ось, например Oz, получим теорему об изменении кинетического момента системы относительно этой осиFrom this equality in the projection onto some fixed axis, for example, Oz, we obtain the theorem on the change in the kinetic moment of the system relative to this axis
Если в течение некоторого промежутка времени 
![]()
![]()
Последнее равенство выражает закон сохранения кинетического момента механической системы относительно оси Oz.The last equality expresses the law of conservation of the kinetic moment of a mechanical system relative to the Oz axis.
Поскольку в данном устройстве силы тяжести ![]()
![]()
![]()
![]()
составляющих его частей - диска с ротором и рамки параллельны вертикальной оси Oz, а реакции ![]()
![]()
![]()
![]()
пренебрегая на некотором сравнительно малом интервале времени трением в опорах, имеем для этого интервалаneglecting friction in the supports on a relatively small time interval, we have for this interval

и так как в начальный момент времени все тела неподвижны, то соответственно Kz=const=0.and since at the initial moment of time all the bodies are motionless, then, respectively, K z = const = 0.
Для данного устройства величина Kz равна сумме кинетических моментов диска с ротором, корпуса со статором электродвигателя и вилкиFor this device, the value of K z is equal to the sum of the kinetic moments of the disk with the rotor, the housing with the stator of the electric motor and the plug
![]()
![]()
После включения питания электродвигателя его ротор с диском 7 приобретает угловую скорость вращения относительно статора двигателя - относительную угловую скорость ![]()

![]()
Проекция этого кинетического момента на ось Oz равнаThe projection of this kinetic moment onto the Oz axis is
При этом, рамка, корпус с двигателем и диск с ротором начинают вращаться вокруг оси Oz с угловой скоростью ![]()
![]()
![]()
![]()
а абсолютные угловые скорости рамки и корпуса с двигателем равны ![]()
![]()
![]()
![]()
С учетом изложенного, для кинетического момента данной механической системы относительно оси Oz имеем уравнениеBased on the foregoing, for the kinetic moment of a given mechanical system with respect to the Oz axis, we have the equation
![]()
![]()
где ![]()
![]()
![]()
![]()
![]()
![]()
Из последнего уравнения имеем расчетную формулу для угловой скорости рамки в зависимости от угловой скорости вращения ротора электродвигателяFrom the last equation we have a calculation formula for the angular velocity of the frame, depending on the angular velocity of rotation of the rotor of the electric motor

Здесь следует отметить, что полученная зависимость является линейной. Направление вращения рамки противоположно направлению вращения диска с ротором, причем при любом значении ωr при α=90° угловая сорость рамки будет равна нулю.It should be noted here that the obtained dependence is linear. The direction of rotation of the frame is opposite to the direction of rotation of the disk with the rotor, and for any value of ω r at α = 90 °, the angular rate of the frame will be zero.
При проведении экспериментов по показаниям датчиков 8 и 9 угловых скоростей строятся экспериментальные зависимости ωе от ωr подтверждающие закон сохранения кинетического момента механической системы, которые сопоставляются с расчетными графиками.During the experiments, the readings of
Другой вариант проведения экспериментальных исследований закона сохранения кинетического момента в данной установке заключается в следующем.Another option for experimental studies of the law of conservation of the kinetic moment in this setup is as follows.
Если после включения электродвигателя и достижения установившегося вращательного движения звеньев устройства переключить питание двигателя с изменением направления вращения его ротора то, поскольку момент внешних сил относительно оси Oz остается в этом случае равным нулю и, следовательно, выполняется закон сохранения кинетического момента системы, то рамка начнет вращаться в направлении, противоположном новому направления вращения ротора, т.е. в направлении его первоначального вращения. При этом соотношение между значениями угловых скоростей ωе и ωr останется прежним.If after turning on the electric motor and reaching the steady rotational movement of the links of the device, switch the motor power with a change in the direction of rotation of its rotor, since the moment of external forces relative to the axis Oz remains in this case equal to zero and, therefore, the law of conservation of the kinetic moment of the system is fulfilled, the frame will begin to rotate in the direction opposite to the new direction of rotation of the rotor, i.e. in the direction of its initial rotation. In this case, the ratio between the angular velocities ω e and ω r will remain the same.
Таким образом, данная полезная модель позволяет существенно повысить информативность и точность исследования закона сохранения кинетического момента механической системы по сравнению с известным устройством, так как обеспечивает регулирование в широком диапазоне угловых скоростей вращения звеньев системы как по величине, так и по направлению, а также за счет обеспечения регистрации этих скоростей посредством датчиков и количественного сравнения результатов экспериментов с теоретическими расчетами.Thus, this useful model can significantly increase the information content and accuracy of the study of the law of conservation of the kinetic moment of a mechanical system in comparison with the known device, as it provides regulation in a wide range of angular speeds of rotation of the system links both in magnitude and direction, as well as due to ensuring registration of these speeds by means of sensors and quantitative comparison of experimental results with theoretical calculations.
Claims (3)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2017146806U RU183308U1 (en) | 2017-12-28 | 2017-12-28 | A device for studying the law of conservation of the kinetic moment of a mechanical system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2017146806U RU183308U1 (en) | 2017-12-28 | 2017-12-28 | A device for studying the law of conservation of the kinetic moment of a mechanical system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU183308U1 true RU183308U1 (en) | 2018-09-17 |
Family
ID=63580682
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2017146806U RU183308U1 (en) | 2017-12-28 | 2017-12-28 | A device for studying the law of conservation of the kinetic moment of a mechanical system |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU183308U1 (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2755547C1 (en) * | 2021-02-12 | 2021-09-17 | Олег Александрович Поваляев | Measuring module for measuring humidity |
| RU2756664C1 (en) * | 2021-02-12 | 2021-10-04 | Олег Александрович Поваляев | Measuring module for measuring absolute pressure |
| CN115240520A (en) * | 2022-07-20 | 2022-10-25 | 苏州大学 | Theoretical mechanics experimental apparatus based on rotor inertia |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN202352186U (en) * | 2011-12-05 | 2012-07-25 | 西南石油大学 | Portable angular momentum conservation apparatus |
| CN102938226A (en) * | 2012-11-27 | 2013-02-20 | 上海师范大学 | Comprehensive demonstration instrument for demonstrating angular momentum conservation and rotational inertia and demonstrating method thereof |
| CN103050036A (en) * | 2012-11-26 | 2013-04-17 | 上海大学 | Demonstrative test device for high-temperature superconductor magnetic suspension angular momentum conservation |
| CN103943005A (en) * | 2014-04-24 | 2014-07-23 | 福建农林大学 | Multifunctional rigid body rotation and angular momentum theorem teaching demonstration instrument |
| CN104952315A (en) * | 2015-05-25 | 2015-09-30 | 南京新辉科教仪器有限公司 | Angular momentum comprehensive demonstration instrument |
| CN205827735U (en) * | 2016-03-11 | 2016-12-21 | 昆明理工大学 | A kind of motor-driven angular momentum conservation demonstration instrument |
| CN106327967A (en) * | 2016-10-21 | 2017-01-11 | 无锡职业技术学院 | Presentation device for angular momentum conservation |
| CN107123344A (en) * | 2017-06-07 | 2017-09-01 | 浙江大学城市学院 | A kind of new angular momentum conservation demonstration and quantitative determination experiment instrument |
-
2017
- 2017-12-28 RU RU2017146806U patent/RU183308U1/en not_active IP Right Cessation
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN202352186U (en) * | 2011-12-05 | 2012-07-25 | 西南石油大学 | Portable angular momentum conservation apparatus |
| CN103050036A (en) * | 2012-11-26 | 2013-04-17 | 上海大学 | Demonstrative test device for high-temperature superconductor magnetic suspension angular momentum conservation |
| CN102938226A (en) * | 2012-11-27 | 2013-02-20 | 上海师范大学 | Comprehensive demonstration instrument for demonstrating angular momentum conservation and rotational inertia and demonstrating method thereof |
| CN103943005A (en) * | 2014-04-24 | 2014-07-23 | 福建农林大学 | Multifunctional rigid body rotation and angular momentum theorem teaching demonstration instrument |
| CN104952315A (en) * | 2015-05-25 | 2015-09-30 | 南京新辉科教仪器有限公司 | Angular momentum comprehensive demonstration instrument |
| CN205827735U (en) * | 2016-03-11 | 2016-12-21 | 昆明理工大学 | A kind of motor-driven angular momentum conservation demonstration instrument |
| CN106327967A (en) * | 2016-10-21 | 2017-01-11 | 无锡职业技术学院 | Presentation device for angular momentum conservation |
| CN107123344A (en) * | 2017-06-07 | 2017-09-01 | 浙江大学城市学院 | A kind of new angular momentum conservation demonstration and quantitative determination experiment instrument |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2755547C1 (en) * | 2021-02-12 | 2021-09-17 | Олег Александрович Поваляев | Measuring module for measuring humidity |
| RU2756664C1 (en) * | 2021-02-12 | 2021-10-04 | Олег Александрович Поваляев | Measuring module for measuring absolute pressure |
| CN115240520A (en) * | 2022-07-20 | 2022-10-25 | 苏州大学 | Theoretical mechanics experimental apparatus based on rotor inertia |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU183308U1 (en) | A device for studying the law of conservation of the kinetic moment of a mechanical system | |
| CN101799934A (en) | Real time human movement capture system based on micro electro mechanical inertia sensing network | |
| CN102102996A (en) | Over-360-degree-angle limit sensor device | |
| CN107607114B (en) | Online frequency characteristic soft test method for digital gyroscope stabilization platform | |
| US10540021B2 (en) | Device for determining the position of an object in space | |
| TW201336222A (en) | Absolute place recording device for motors | |
| CN103943004A (en) | Coriolis acceleration experiment device | |
| Qu et al. | Eccentric triboelectric nanosensor for monitoring mechanical movements | |
| CN109685852A (en) | The scaling method of camera and inertial sensor, system, equipment and storage medium | |
| RU86738U1 (en) | DYNAMIC MODELING STAND | |
| RU2494345C1 (en) | Multi-purpose wide-range test bench for monitoring of angular velocity metres | |
| RU2554631C2 (en) | Test rig for angular oscillations in two planes | |
| RU190692U1 (en) | DOUBLE HANDING ROTARY DYNAMIC STAND | |
| CN207884759U (en) | A kind of moving camera attitude-control device simplified | |
| Qian et al. | Vision-based permanent magnet spherical motor orientation detection and adaptive PD control system | |
| JP2012042299A (en) | Measuring method for sphere movement route | |
| Bhatta et al. | An electromagnetic and triboelectric hybrid motion sensing system for self-powered robotic balancing platforms | |
| RU205130U1 (en) | Installation for demonstration and study of the properties of a gyroscope | |
| RU174186U1 (en) | GYRO-COMPASS | |
| RU120492U1 (en) | WAY SENSOR TEST TEST | |
| RU140097U1 (en) | DEVICE FOR RESEARCH OF ROTARY MOTION OF DYNAMICALLY UNABLE BODY | |
| SU133642A1 (en) | Five-component strain gauge for researching wind wheel models | |
| Sushchenko | Design of robust two-axis systems for stabilization and tracking of information-measuring devices operated on ground vehicles | |
| Guo et al. | A novel method on real-time measurement of 2-DOF motions of spherical ultrasonic motor | |
| Wang et al. | Rotor orientation detection method of spherical motor based on single 2-DOF optical sensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM9K | Utility model has become invalid (non-payment of fees) |
Effective date: 20181229 |