KR20250040407A - 배송로봇 - Google Patents
배송로봇 Download PDFInfo
- Publication number
- KR20250040407A KR20250040407A KR1020230123438A KR20230123438A KR20250040407A KR 20250040407 A KR20250040407 A KR 20250040407A KR 1020230123438 A KR1020230123438 A KR 1020230123438A KR 20230123438 A KR20230123438 A KR 20230123438A KR 20250040407 A KR20250040407 A KR 20250040407A
- Authority
- KR
- South Korea
- Prior art keywords
- door
- delivery robot
- shelf
- link
- storage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/008—Manipulators for service tasks
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/60—Power-operated mechanisms for wings using electrical actuators
- E05F15/603—Power-operated mechanisms for wings using electrical actuators using rotary electromotors
- E05F15/611—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for swinging wings
- E05F15/63—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for swinging wings operated by swinging arms
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47B—TABLES; DESKS; OFFICE FURNITURE; CABINETS; DRAWERS; GENERAL DETAILS OF FURNITURE
- A47B96/00—Details of cabinets, racks or shelf units not covered by a single one of groups A47B43/00 - A47B95/00; General details of furniture
- A47B96/02—Shelves
- A47B96/025—Shelves with moving elements, e.g. movable extensions or link elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/007—Manipulators mounted on wheels or on carriages mounted on wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/0009—Constructional details, e.g. manipulator supports, bases
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60P—VEHICLES ADAPTED FOR LOAD TRANSPORTATION OR TO TRANSPORT, TO CARRY, OR TO COMPRISE SPECIAL LOADS OR OBJECTS
- B60P3/00—Vehicles adapted to transport, to carry or to comprise special loads or objects
- B60P3/007—Vehicles adapted to transport, to carry or to comprise special loads or objects for delivery of small articles, e.g. milk, frozen articles
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B47/00—Operating or controlling locks or other fastening devices by electric or magnetic means
- E05B47/0001—Operating or controlling locks or other fastening devices by electric or magnetic means with electric actuators; Constructional features thereof
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05D—HINGES OR SUSPENSION DEVICES FOR DOORS, WINDOWS OR WINGS
- E05D15/00—Suspension arrangements for wings
- E05D15/40—Suspension arrangements for wings supported on arms movable in vertical planes
- E05D15/46—Suspension arrangements for wings supported on arms movable in vertical planes with two pairs of pivoted arms
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/60—Power-operated mechanisms for wings using electrical actuators
- E05F15/603—Power-operated mechanisms for wings using electrical actuators using rotary electromotors
- E05F15/611—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for swinging wings
- E05F15/627—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for swinging wings operated by flexible elongated pulling elements, e.g. belts, chains or cables
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60J—WINDOWS, WINDSCREENS, NON-FIXED ROOFS, DOORS, OR SIMILAR DEVICES FOR VEHICLES; REMOVABLE EXTERNAL PROTECTIVE COVERINGS SPECIALLY ADAPTED FOR VEHICLES
- B60J5/00—Doors
- B60J5/02—Doors arranged at the vehicle front
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/70—Power-operated mechanisms for wings with automatic actuation
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2201/00—Constructional elements; Accessories therefor
- E05Y2201/40—Motors; Magnets; Springs; Weights; Accessories therefor
- E05Y2201/43—Motors
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Human Computer Interaction (AREA)
- Health & Medical Sciences (AREA)
- Public Health (AREA)
- Transportation (AREA)
- Manipulator (AREA)
Abstract
내부에 수납부(storage) 및 전방에 바디 개구부를 포함하는 바디 하우징; 상기 바디 개구부를 커버하는 닫힌 상태 또는 상기 바디 개구부를 개방하는 열린 상태로 구동하는 도어를 포함하고, 상기 도어는, 상기 닫힌 상태에서 상기 바디 하우징의 전방에서 상기 바디 개구부를 커버하고, 열린 상태에서며 상기 바디 하우징의 측방향으로 슬라이드 이동하는 도어패널; 제1 단부는 상기 도어패널에 회전 가능하게 결합하고 제2 단부는 상기 바디 하우징에 회전 가능하게 결합된 제1 도어링크; 및 상기 제1 도어링크에 회전력을 제공하는 모터를 포함하며, 상기 도어패널은 상기 열린 상태와 상기 닫힌 상태에서 각도가 상이한 진 것을 특징으로 하는 배송로봇은 도어가 열릴 때 회동 범위를 바디의 외측면을 따라 이동하여 제한된 공간에서 안전하게 도어를 개폐할 수 있다.
Description
본 발명은 내부에 물품을 수납하는 수납부를 포함하는 바디를 개폐할 수 도어를 구비한 배송로봇에 관한 것이다.
공장 자동화의 일 부분을 담당하기 위해, 로봇은 산업용으로 개발되어 왔다. 최근에는 로봇을 응용한 분야가 더욱 확대되고 있는바, 의료용 로봇과 우주항공용 로봇뿐만 아니라 일상 생활에서 사용될 수 있는 로봇도 개발되고 있다.
이러한 일상 생활용 로봇은 사용자의 명령에 응답하여 특정 서비스(예를 들어, 쇼핑, 서빙, 대화, 청소 등)를 제공할 수 있도록 개발되고 있다. 특정 장소에서 고정적으로 반복작업을 하는 산업용 로봇이나, 의료용이나 우주 항공용과 같이 고가의 비용을 들여 특정한 전문적인 기능을 수행하는 것과 달리 일상 생활용 로봇은 주행기능, 소통기능이 중요하며 제조 비용도 너무 과도한 경우 보급이 어려운 문제가 있다.
특히 사람과 같이 이족보행을 하지 않고 바퀴를 이용하여 이동하므로 바닥의 요철을 넘는 동작이나 장애물을 피해서 이동할 수 있어야 하여 바닥의 요철을 넘더라도 넘어지지 않고 충격을 최소화 할 수 있어야 하고, 장애물을 피할 수 있도록 여러 센서를 이용하여 빠른 판단을 할 수 있어야 한다.
이러한 로봇의 일 예로 최근 개발이 활발히 이루어지는 로봇은 음식을 운반하거나 작은 물품을 운반할 수 있는 배송로봇이다. 그릇이나 배송물품은 로봇에 구비된 선반에 올려질 수 있고, 로봇은 고객이나 서비스 제공자에게 운반할 수 있다.
식당과 같이 제한된 공간에서 이용할 수도 있으나 호텔이나 소정저리 이동해야 하는 배송로봇의 경우 관리자가 근처에 없는 위치까지 이동할 수 있다. 이동거리가 긴 배송로봇은 물품이 선반에서 추락하지 않도록 이동 해야 하여 무인으로 동작 시 주변의 장애물을 감지하여 동작하는 등의 안전성을 고려한 배송로봇에 대한 니즈가 있다.
또한, 배송하는 물품의 종류가 다양해지면서 내부공간의 활용도를 높인 배송로봇에 대한 니즈도 있다.
본 발명은 내부에 물품을 수납하는 수납부를 포함하는 바디를 개폐할 수 도어를 구비한 배송로봇을 제공하는 것을 목적으로 한다.
내부에 수납부(storage) 및 전방에 바디 개구부를 포함하는 바디 하우징; 상기 바디 개구부를 커버하는 닫힌 상태 또는 상기 바디 개구부를 개방하는 열린 상태로 구동하는 도어를 포함하고, 상기 도어는, 상기 닫힌 상태에서 상기 바디 하우징의 전방에서 상기 바디 개구부를 커버하고, 열린 상태에서며 상기 바디 하우징의 측방향으로 슬라이드 이동하는 도어패널; 제1 단부는 상기 도어패널에 회전 가능하게 결합하고 제2 단부는 상기 바디 하우징에 회전 가능하게 결합된 제1 도어링크; 및 상기 제1 도어링크에 회전력을 제공하는 모터를 포함하며, 상기 도어패널은 상기 열린 상태와 상기 닫힌 상태에서 각도가 상이한 진 것을 특징으로 하는 배송로봇을 제공한다.
상기 도어패널은 닫힌 상태에서 상기 바디 개구부의 일측에 위치하고 열린 상태에서 상기 바디 개구부의 타측으로 이동하는 제1 엣지를 포함하며, 상기 제1 도어링크는 제1 단부는 상기 제1 엣지에 결합될 수 있다.
상기 제1 도어링크는 제1 단부는 상기 도어패널의 상기 제1 엣지 방향으로 꺾어질 수 있다.
상기 도어패널에 결합한 제1 단부와 상기 바디 하우징에 결합된 제2 단부를 포함하는 제2 도어링크를 포함하고, 상기 제1 도어링크의 제1 단부와 제2 단부 사이의 제1 간격은 상기 제2 도어링크의 제1 단부와 제2 단부 사이의 제2 간격보다 더 길 수 있다.
상기 제2 도어링크는 상기 제1 단부와 제2 단부가 같은 방향을 향하도록 U자 형상으로 꺾인 절곡부를 포함할 수 있다.
상기 제2 도어링크는 상기 절곡부의 일측에서 연장되며 상기 도어에 결합된 상기 제1 단부를 포함하는 제1 부분; 및 상기 절곡부의 타측에서 연장되며 상기 바디에 결합되는 상기 제2 단부를 포함하는 제2 부분을 포함하고, 상기 제2 부분의 길이는 상기 제1 부분의 길이보다 길 수 있다.
상기 도어패널은 상기 바디 하우징의 일면에 위치하는 전면 도어부와 상기 일면에서 측방향으로 곡선을 이루며 휘어진 측면 도어부를 포함하고, 상기 제2 도어링크의 제1 단부는 상기 전면 도어부와 상기 측면 도어부 사이에 결합될 수 있다.
상기 제2 도어링크의 상기 제2 단부는 상기 바디 개구부의 단부에 인접하여 상기 바디 하우징에 회전 가능하게 결합될 수 있다.
상기 제2 도어링크는 상기 도어패널의 상측과 하측에 각각 구비되어 한 쌍을 포함할 수 있다.
상기 수납부를 상부 수납부와 하부 수납부로 구획하며 상기 바디 하우징에 탈착 가능한 중간선반을 포함하고, 상기 도어는 상기 중간선반을 기준으로 상부 수납부를 개폐하는 상부도어; 및 상기 중간선반의 하부 수납부를 개폐하는 하부도어를 포함하며, 상기 도어패널에 결합된 한 쌍의 제2 도어링크 중 하나는 상기 중간선반의 측방향에 위치할 수 있다.
상기 모터와 연결된 제1 풀리; 상기 제1 도어링크와 연결된 제2 풀리; 및 상기 제1 풀리와 상기 제2 풀리를 감싸는 폐곡선을 이루는 평벨트를 포함할 수 있다.
상기 도어는, 상기 제2 풀리의 외주면의 일측에서 돌출된 센싱돌기를 포함하고, 상기 도어패널이 닫힌 상태에서 상기 센싱돌기와 접촉하는 닫힘감지센서; 및 상기 도어패널이 열린 상태에서 상기 센싱돌기와 접촉하는 열림감지센서를 포함할 수 있다.
상기 제1 도어링크는 제1 회전방향으로 회전하며 상기 도어패널을 상기 닫힌 상태에서 상기 열린 상태로 전환하며, 상기 도어는, 상기 닫힌 상태에서 상기 제1 도어링크의 상기 제1 회전방향에 위치하는 잠금레버; 및 상기 열린 상태로 전환 시 상기 잠금레버를 상기 제1 도어링크의 회전범위에서 제거하는 잠금모터를 포함하고, 상기 잠금레버는 수동으로 가압시 상기 제1 도어링크의 회전범위에서 제거 할 수 있다.
상기 도어는 상하 좌우 방향으로 2x2로 배치된 4개의 도어를 포함하며, 좌측에 위치하는 도어와 우측에 위치하는도어는 서로 대칭방향으로 구동하고, 상기 바디 하우징 내부의 수납부의 구획형태에 따라 상기 4개의 도어를 선택적으로 구동하는 제어부를 포함할 수 있다.
본 발명의 배송로봇은 수납부를 개폐할 수 있는 도어를 구비하며 이동 시 잠금장치를 통해 도어가 열리는 것을 방지하여 물품을 안전하게 배송할 수 있다.
또한, 본 발명의 배송로봇은 도어가 열릴 때 회동 범위를 바디의 외측면을 따라 이동하여 제한된 공간에서 안전하게 도어를 개폐할 수 있다.
또한, 본 발명의 배송로봇의 도어를 구동하는 링크는 외측으로 노출되는 것을 최소화 하여 미관상 우수하고 다른 부재와 간섭이 발생하지 않는다.
또한, 본 발명의 배송로봇의 도어에 손끼임이 발생하더라도 부상이 발생하지 않으며 모터가 역기전력으로 인한 과전압이 걸리지 않아 안전하다.
또한, 본 발명의 배송로봇은 수납부 내부를 필요에 따라 분할할 수 있고, 선택적으로 개폐할 수 있는 복수개의 도어를 통해 내부공간의 활용도를 높일 수 있다.
또한, 본 발명의 배송로봇은 선반 및 파티션의 탈착여부를 감지하여 도어의 수납부의 분할 상태에 따라 복수개의 도어를 선택적으로 구동할 수 있다.
또한, 본 발명의 배송로봇은 파티션을 사용하지 않는 경우 배송로봇의 수납부 내부에 수납할 수 있다.
또한, 본 발명의 배송로봇은 슬라이딩 선반을 구비하여 내부에 수납된 물품을 넣고 꺼내는 데 편의성을 향상시킬 수 있다.
또한, 본 발명의 배송로봇은 슬라이딩 선반의 하부에 위치하는 전자부품으로 액체가 유입을 방지하여 배송로봇의 고장율을 낮출 수 있다.
또한, 본 발명의 배송로봇의 슬라이딩 선반은 손쉽게 탈착할 수 있어 유지보수가 용이한 장점이 있다.
또한, 본 발명의 배송로봇은 내부 카메라를 구비하여 내부에 물품의 수납여부를 판단하여 도어를 개폐할 수 있다.
또한, 본 발명의 배송로봇은 배송로봇 외부의 사람 유무를 감지할 수 있어 슬라이딩 선반의 인출시 안전여부를 미리 확인할 수 있다.
본 발명에서 얻을 수 있는 효과는 이상에서 언급한 효과들로 제한되지 않으며, 언급하지 않은 또 다른 효과들은 아래의 기재로부터 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 명확하게 이해될 수 있을 것이다.
도 1은 본 발명의 일 실시예에 따른 5G 네트워크 기반의 클라우드 시스템을 나타내는 도면이다.
도 2는 본 발명의 일 실시 예에 따른 배송로봇의 구성을 설명하기 위한 블록도이다.
도 3은 본 발명의 일 실시 예에 따른 배송로봇의 전방 사시도이다.
도 4 및 도 5는 본 발명의 일 실시 예에 따른 배송로봇의 도어가 개방된 상태를 도시한 도면이다.
도 6은 본 발명의 일 실시예에 따른 배송로봇의 수납부 내부를 도시한 도면이다.
도 7은 본 발명의 일 실시예에 따른 배송로봇의 수납부의 구획 방법을 도시한 개념도이다.
도 8은 본 발명의 일 실시예에 따른 배송로봇의 도어 구동부를 도시한 평면도이다.
도 9는 본 발명의 일 실시 예에 따른 배송로봇의 도어 구동부를 도시한 사시도이다.
도 10은 본 발명의 일 실시 예에 따른 배송로봇의 링크의 동작을 설명하기 위한 개념도이다.
도 11은 본 발명의 일 실시 예에 따른 배송로봇의 도어 구동부를 하측에서 바라본 도면이다.
도 12는 본 발명의 일 실시예에 따른 배송로봇의 중간선반의 결합방법을 도시한 도면이다.
도 13은 본 발명의 일 실시예에 따른 배송로봇의 탄성센서를 도시한 분해도이다.
도 14는 본 발명의 일 실시예에 따른 배송로봇의 제1 탄성센서의 동작을 도시한 도면이다.
도 15는 본 발명의 일 실시예에 따른 배송로봇의 중간선반의 측면도와 저면도이다.
도 16는 본 발명의 일 실시예에 따른 배송로봇의 수납부의 파티션을 삽입하는 방법을 설명하기 위한 도면이다
도 17은 본 발명의 일 실시예에 따른 배송로봇의 수납부 내부를 도시한 단면도이다.
도 18은 본 발명의 일 실시예에 따른 배송로봇의 파티션 수납방법을 도시한 도면이다.
도 19 및 도 20는 본 발명의 일 실시예에 따른 배송로봇의 수납레일과 파티션을 도시한 도면이다.
도 21은 본 발명의 일 실시예에 따른 배송로봇의 파티션 수납방법의 다른 실시예를 도시한 도면이다.
도 22은 본 발명의 일 실시예에 따른 배송로봇의 슬라이딩 선반이 인출된 상태를 도시한 사시도이다.
도 23는 도 22 상태를 도시한 측면도이다.
도 24는 본 발명의 일 실시예에 따른 배송로봇의 슬라이딩 선반 및 선반 구동부를 도시한 분해 사시도이다.
도 25는 본 발명의 일 실시예에 따른 배송로봇의 수납부 베이스에 결합된 슬라이딩 레일 및 슬라이딩 선반을 도시한 도면이다.
도 26은 본 발명의 일 실시예에 따른 배송로봇의 슬라이딩 선반 분리방법을 도시한 도면이다.
도 27은 본 발명의 일 실시예에 따른 배송로봇의 슬라이딩 선반의 안전제어 방법에 관한 것이다.
도 28 및 도 29는 본 발명의 다른 실시예에 따른 배송로봇의 슬라이딩 선반(131)의 구동부를 도시한 도면이다.
도 30은 본 발명의 일 실시예에 따른 배송로봇의 수납부를 도시한 정면도이다.
도 31은 본 발명의 일 실시예에 따른 배송로봇의 파티션의 유무에 따라 상부 수납부에 위치하는 내부 카메라가 촬영한 화면을 도시한 도면이다.
도 32는 본 발명의 일 실시예에 따른 배송로봇의 내부 카메라(195)의 화각을 도시한 개념도이다.
도 33은 본 발명의 일 실시예에 따른 배송로봇의 내부 카메라(195)를 하측으로 20° 기울인 상태에서 촬영한 경우를 도시한 도면이다.
도 34는 본 발명의 일 실시예에 따른 배송로봇의 내부 카메라를 하측으로 30° 기울인 상태에서 촬영한 경우를 도시한 도면이다.
도 35는 호텔에서 고객이 호텔리어에게 물품을 요청한 경우 이를 배송로봇을 이용하여 고객에게 전달하는 과정을 나타낸 순서도이다.
도 36 및 도 37은 도 35의 시나리오를 배송로봇의 제어부의 제어로직을 도시한 순서도이다.
도 2는 본 발명의 일 실시 예에 따른 배송로봇의 구성을 설명하기 위한 블록도이다.
도 3은 본 발명의 일 실시 예에 따른 배송로봇의 전방 사시도이다.
도 4 및 도 5는 본 발명의 일 실시 예에 따른 배송로봇의 도어가 개방된 상태를 도시한 도면이다.
도 6은 본 발명의 일 실시예에 따른 배송로봇의 수납부 내부를 도시한 도면이다.
도 7은 본 발명의 일 실시예에 따른 배송로봇의 수납부의 구획 방법을 도시한 개념도이다.
도 8은 본 발명의 일 실시예에 따른 배송로봇의 도어 구동부를 도시한 평면도이다.
도 9는 본 발명의 일 실시 예에 따른 배송로봇의 도어 구동부를 도시한 사시도이다.
도 10은 본 발명의 일 실시 예에 따른 배송로봇의 링크의 동작을 설명하기 위한 개념도이다.
도 11은 본 발명의 일 실시 예에 따른 배송로봇의 도어 구동부를 하측에서 바라본 도면이다.
도 12는 본 발명의 일 실시예에 따른 배송로봇의 중간선반의 결합방법을 도시한 도면이다.
도 13은 본 발명의 일 실시예에 따른 배송로봇의 탄성센서를 도시한 분해도이다.
도 14는 본 발명의 일 실시예에 따른 배송로봇의 제1 탄성센서의 동작을 도시한 도면이다.
도 15는 본 발명의 일 실시예에 따른 배송로봇의 중간선반의 측면도와 저면도이다.
도 16는 본 발명의 일 실시예에 따른 배송로봇의 수납부의 파티션을 삽입하는 방법을 설명하기 위한 도면이다
도 17은 본 발명의 일 실시예에 따른 배송로봇의 수납부 내부를 도시한 단면도이다.
도 18은 본 발명의 일 실시예에 따른 배송로봇의 파티션 수납방법을 도시한 도면이다.
도 19 및 도 20는 본 발명의 일 실시예에 따른 배송로봇의 수납레일과 파티션을 도시한 도면이다.
도 21은 본 발명의 일 실시예에 따른 배송로봇의 파티션 수납방법의 다른 실시예를 도시한 도면이다.
도 22은 본 발명의 일 실시예에 따른 배송로봇의 슬라이딩 선반이 인출된 상태를 도시한 사시도이다.
도 23는 도 22 상태를 도시한 측면도이다.
도 24는 본 발명의 일 실시예에 따른 배송로봇의 슬라이딩 선반 및 선반 구동부를 도시한 분해 사시도이다.
도 25는 본 발명의 일 실시예에 따른 배송로봇의 수납부 베이스에 결합된 슬라이딩 레일 및 슬라이딩 선반을 도시한 도면이다.
도 26은 본 발명의 일 실시예에 따른 배송로봇의 슬라이딩 선반 분리방법을 도시한 도면이다.
도 27은 본 발명의 일 실시예에 따른 배송로봇의 슬라이딩 선반의 안전제어 방법에 관한 것이다.
도 28 및 도 29는 본 발명의 다른 실시예에 따른 배송로봇의 슬라이딩 선반(131)의 구동부를 도시한 도면이다.
도 30은 본 발명의 일 실시예에 따른 배송로봇의 수납부를 도시한 정면도이다.
도 31은 본 발명의 일 실시예에 따른 배송로봇의 파티션의 유무에 따라 상부 수납부에 위치하는 내부 카메라가 촬영한 화면을 도시한 도면이다.
도 32는 본 발명의 일 실시예에 따른 배송로봇의 내부 카메라(195)의 화각을 도시한 개념도이다.
도 33은 본 발명의 일 실시예에 따른 배송로봇의 내부 카메라(195)를 하측으로 20° 기울인 상태에서 촬영한 경우를 도시한 도면이다.
도 34는 본 발명의 일 실시예에 따른 배송로봇의 내부 카메라를 하측으로 30° 기울인 상태에서 촬영한 경우를 도시한 도면이다.
도 35는 호텔에서 고객이 호텔리어에게 물품을 요청한 경우 이를 배송로봇을 이용하여 고객에게 전달하는 과정을 나타낸 순서도이다.
도 36 및 도 37은 도 35의 시나리오를 배송로봇의 제어부의 제어로직을 도시한 순서도이다.
이하, 첨부된 도면을 참조하여 본 명세서에 개시된 실시 예를 상세히 설명하되, 도면 부호에 관계없이 동일하거나 유사한 구성요소는 동일한 참조 번호를 부여하고 이에 대한 중복되는 설명은 생략하기로 한다. 이하의 설명에서 사용되는 구성요소에 대한 접미사 "모듈" 및 "부"는 명세서 작성의 용이함만이 고려되어 부여되거나 혼용되는 것으로서, 그 자체로 서로 구별되는 의미 또는 역할을 갖는 것은 아니다. 또한, 본 명세서에 개시된 실시 예를 설명함에 있어서 관련된 공지 기술에 대한 구체적인 설명이 본 명세서에 개시된 실시 예의 요지를 흐릴 수 있다고 판단되는 경우 그 상세한 설명을 생략한다. 또한, 첨부된 도면은 본 명세서에 개시된 실시 예를 쉽게 이해할 수 있도록 하기 위한 것일 뿐, 첨부된 도면에 의해 본 명세서에 개시된 기술적 사상이 제한되지 않으며, 본 발명의 사상 및 기술 범위에 포함되는 모든 변경, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다.
제1, 제2 등과 같이 서수를 포함하는 용어는 다양한 구성요소들을 설명하는데 사용될 수 있지만, 상기 구성요소들은 상기 용어들에 의해 한정되지는 않는다. 상기 용어들은 하나의 구성요소를 다른 구성요소로부터 구별하는 목적으로만 사용된다.
어떤 구성요소가 다른 구성요소에 "연결되어" 있다거나 "접속되어" 있다고 언급된 때에는, 그 다른 구성요소에 직접적으로 연결되어 있거나 또는 접속되어 있을 수도 있지만, 중간에 다른 구성요소가 존재할 수도 있다고 이해되어야 할 것이다. 반면에, 어떤 구성요소가 다른 구성요소에 "직접 연결되어" 있다거나 "직접 접속되어" 있다고 언급된 때에는, 중간에 다른 구성요소가 존재하지 않는 것으로 이해되어야 할 것이다.
단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다.
본 출원에서, "포함한다" 또는 "가지다" 등의 용어는 명세서상에 기재된 특징, 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다.
로봇은 어떤 작업이나 조작을 자동으로 할 수 있는 기계 장치로서, 로봇은 외부의 제어 장치에 의해 조종되거나 제어 장치가 내장될 수도 있다. 기 설정된 동작만 반복하여 처리하거나 무거운 물건을 들어올리거나, 정밀한 작업의 수행 및 극한의 환경에서의 작업과 같이 인간이 수행하기 어려운 작업을 수행할 수 있다.
작업수행을 위해 액츄에이터 또는 모터를 포함하는 구동부를 구비하여 로봇 관절을 움직이는 등의 다양한 물리적 동작을 수행할 수 있다.
로봇은 그 제조비용이 높고 조작의 전문성 등의 문제로 특정 작업에 특화된 외관을 가지는 산업용 로봇이나 의료용 로봇이 먼저 발달 되었다. 산업용, 의료용 로봇은 지정된 장소에서 동일한 동작을 반복수행하나,
최근에는 이동 가능한 로봇이 등장하고 있다. 특히 우주항공산업과 같이 인간이 직접 가기 어려운 먼 행성에서 탐사작업 등을 수행할 수 있으며 이러한 로봇은 주행기능이 추가된다.
주행기능을 수행하기 위해서는 구동부를 구비하며 휠, 브레이트, 캐스터, 모터 등을 포함할 수 있으며 주변의 장애물을 파악하고 이를 피해 주행하기 위해서는 인공지능을 탑재한 로봇이 등장하고 있다.
인공지능 기술이 적용되어, 안내 로봇, 운반 로봇, 청소 로봇, 웨어러블 로봇, 엔터테인먼트 로봇, 펫 로봇, 무인 비행 로봇 등으로 구현될 수 있다.
로봇은 동작을 제어하기 위한 로봇 제어 모듈을 포함할 수 있고, 로봇 제어 모듈은 소프트웨어 모듈 또는 이를 하드웨어로 구현한 칩을 의미할 수 있다.
로봇은 다양한 종류의 센서들로부터 획득한 센서 정보를 이용하여 로봇의 상태 정보를 획득하거나, 주변 환경 및 객체를 검출(인식)하거나, 맵 데이터를 생성하거나, 이동 경로 및 주행 계획을 결정하거나, 사용자 상호작용에 대한 응답을 결정하거나, 동작을 결정할 수 있다.
로봇은 적어도 하나 이상의 인공 신경망으로 구성된 학습 모델을 이용하여 상기한 동작들을 수행할 수 있다. 예컨대, 로봇은 학습 모델을 이용하여 주변 환경 및 객체를 인식할 수 있고, 인식된 주변 환경 정보 또는 객체 정보를 이용하여 동작을 결정할 수 있다. 여기서, 학습 모델은 로봇에서 직접 학습되거나, AI 서버등의 외부 장치에서 학습된 것일 수 있다.
이때, 로봇은 직접 학습 모델을 이용하여 결과를 생성하여 동작을 수행할수도 있지만, AI 서버 등의 외부 장치에 센서 정보를 전송하고 그에 따라 생성된 결과를 수신하여 동작을 수행할 수도 있다.
인공 지능을 통해 로봇은 자율주행을 수행할 수 있다. 스스로 최적의 경로를 판단하고 장애물을 피해서 이동 가능한 기술을 의미하며 현재 적용되고 있는 자율주행 기술은 주행중인 차선을 유지하는 기술, 어댑티브 크루즈 컨트롤과 같이 속도를 자동으로 조절하는 기술, 정해진 경로를 따라 자동으로 주행하는 기술, 목적지가 설정되면 자동으로 경로를 설정해주는 주행기술 등이 모두 포함될 수 있다.
자율주행을 수행하기 위해서는 주변상황의 데이터를 인지하기 위해 수많은 센서를 포함할 수 있다. 센서로는 근접 센서, 조도 센서, 가속도 센서, 자기센서, 자이로 센서, 관성 센서, RGB 센서, IR 센서, 지문 인식 센서, 초음파 센서, 광 센서, 마이크로폰, 라이다, 레이더 등을 들 수 있다.
센서에서 수집한 정보 이외에 RGBC카메라, 적외선 카메라 등을 통해 수집한 영상정보와 마이크로폰을 통해 수집한 음향정보를 통해 자율주행을 수행할 수 있다. 또한, 사용자 입력부를 통해 입력된 정보에 기초하여 주행할 수 있다. 무선통신부를 통해 수집한 맵 데이터, 위치정보 및 주변 상황의 정보 등 또한 자율주행 수행에 필요한 정보들이다.
맵 데이터에는 로봇이 이동하는 공간에 배치된 다양한 객체들에 대한 객체 식별 정보가 포함될 수 있다. 예컨대, 맵 데이터에는 벽, 문 등의 고정 객체들과 화분, 책상 등의 이동 가능한 객체들에 대한 객체 식별 정보가 포함될 수 있다. 그리고, 객체 식별 정보에는 명칭, 종류, 거리, 위치 등이 포함될 수 있다.
따라서 로봇은 인공지능이 학습할 수 있는 데이터를 수집하기 위해 센서 및 다양한 입력부 그리고 무선통신부 등을 필수적으로 구비하고 각종정보를 종합하여 최적의 동작을 수행할 수 있다. 인공지능을 수행하는 러닝 프로세서는 로봇내의 제어부에 탑재하여 학습을 수행할 수도 있고, 수집한 정보를 서보로 전송하고 서버를 통해 학습하여 학습결과를 로봇에 다시 전송하여 이를 기초로 자율주행을 수행할 수 있다.
인공지능을 구비한 로보트는 새로운 장소에서도 주변 정보를 수집하여 전체 맵을 구현할 수 있으며, 주요활동반경의 장소는 누적되는 정보량이 많아 보다 정확한 자율주행을 수행할 수 있다.
사용자 입력을 받기위해 터치스크린이나 버튼을 구비할 수 있으며 사용자의 음성을 인식하여 명령을 입력받을 수도 있다. 프로세서는 음성입력을 문자열로 변환하기 위해 STT(Speech To Text) 엔진 또는 자연어의 의도 정보를 획득하기 위한 자연어 처리(NLP: Natural Language Processing) 엔진 중에서 적어도 하나 이상을 이용하여, 사용자 입력에 상응하는 의도 정보를 획득할 수 있다.
이때, STT 엔진 또는 NLP 엔진 중에서 적어도 하나 이상은 적어도 일부가 머신 러닝 알고리즘에 따라 학습된 인공 신경망으로 구성될 수 있다. 그리고, STT 엔진 또는 NLP 엔진 중에서 적어도 하나 이상은 러닝 프로세서에 의해 학습된 것이나, AI 서버의 러닝 프로세서에 의해 학습된 것이거나, 또는 이들의 분산 처리에 의해 학습된 것일 수 있다.
도 1은 본 발명의 일 실시 예에 따른 5G 네트워크 기반의 클라우드 시스템(1000)을 나타낸다.
도 1을 참고하면, 클라우드 시스템(1000)은 배송로봇(100), 이동 단말(300), 로봇 관제 시스템(200), 각종 기기(400) 및 5G 네트워크(500)를 포함할 수 있다. 배송로봇(100)은 물품을 출발지에서 목적지로 운반하는 로봇이다.
배송로봇(100)은 실외뿐만 아니라 실내에서도 물품을 목적지로 이동할 수 있다. 배송로봇(100)은 AGV(Automated Guided Vehicle)로 구현될 수 있으며, AGV는 바닥면의 센서, 자기장, 비전기기 등에 의해 움직이는 운송 장치일 수 있다.
배송로봇(100)은 물품을 수납할 수 있도록 선반을 구비하며 측벽이 생략되어 내부가 개방된 타입 또는 주행거리가 긴 경우 도어로 개폐가능한 수납부를 포함하는 형태로 구성할 수 있다.
이동 단말(300)은 5G 네트워크(500)를 통해 배송로봇(100)과 통신할 수 있다. 이동 단말(300)은 물품을 적재하기 위해 파티션을 보관 영역에 설치하는 사용자가 소지한 기기 또는 적재된 물품의 수령자가 소지한 기기일 수 있다. 이동 단말(300)은 영상 기반으로 정보를 제공할 수 있으며, 이동 단말(300)은 휴대폰, 스마트 폰(smart phone), 웨어러블 디바이스(wearable device, 예를 들어, 워치형 단말기 (smartwatch), 글래스형 단말기 (smart glass), HMD(head mounted display)) 등의 이동형 기기들을 포함할 수 있다.
로봇 관제 시스템(200)는 배송로봇(100)을 원격으로 제어할 수 있으며, 배송로봇(100)의 다양한 요청에 응답할 수 있다. 예를 들면, 로봇 관제 시스템(200)은 배송로봇(100)의 요청에 기초하여, 인공 지능을 이용한 연산을 수행할 수 있다.
또한, 로봇 관제 시스템(200)은 배송로봇(100)의 이동 경로를 설정할 수 있으며, 로봇 관제 시스템(200)은 복수의 목적지가 있는 경우, 목적지의 이동 순서를 설정할 수 있다.
각종 기기(400)는 개인 컴퓨터(PC, 400a), 자율 주행차(400b), 홈 로봇(400c) 등을 포함할 수 있다. 배송로봇(100)은 물품의 운송 목적지에 도착하는 경우, 홈 로봇(400c)과의 통신을 통해 홈 로봇(400c)에 직접 물품을 전달할 수 있다.
각종 기기(400)는 배송로봇(100), 이동 단말(300), 로봇 관제 시스템(200) 등과 5G 네트워크(500)를 통해 유무선으로 연결될 수 있다.
상기 배송로봇(100), 이동 단말(300), 로봇 관제 시스템(200) 및 각종 기기(400)는 모두 5G 모듈을 탑재하여 100Mbps 내지 20Gbps(또는, 그 이상) 속도로 데이터를 송수신할 수 있어서 대용량의 동영상 파일을 다양한 기기로 전송할 수 있으며, 저전력으로 구동되어 전력 소비가 최소화되게 할 수 있다. 다만, 상기 전송 속도는 실시 예에 따라 달리 구현될 수 있다.
5G 네트워크(500)는 5G 이동 통신 네트워크, 근거리 네트워크, 인터넷 등을 포함할 수 있으며, 유무선으로 기기들의 통신 환경을 제공할 수 있다.
도 2은 본 발명의 일 실시 예에 따른 배송로봇(100)의 구성을 설명하기 위한 블럭도이며, 도 3은 본 발명의 일 실시 예에 따른 배송로봇(100)의 전방 사시도이다. 도 2에 도시된 구성요소들은 배송로봇(100)을 구현하는데 있어서 필수적인 것은 아니어서, 본 명세서 상에서 설명되는 배송로봇(100)은 위에서 열거된 구성요소들 보다 많거나, 또는 적은 구성요소들을 가질 수 있다.
도 3을 참고하면, 배송로봇(100)의 바디(110)는 내부에 각종 부품이 실장되고 물품을 수납할 수 있는 수납부를 포함한다. 바디(110)는 하부에 위치하는 주행부(170)를 통해 이동할 수 있다. 비다는 외관을 구성하는 바디 하우징(111), 바디 하우징(110) 내에 물품을 수납할 수 있는 선반을 포함하는 수납부(115, 도 4 참조)를 포함할 수 있다.
도 2를 참조하면 본 발명의 배송로봇(100)은 도어(120), 주행부(170), 센서부(160), 출력부(150), 입력부(190), 제어부(180), 통신부(185) 및 전원 공급부(189)를 포함할 수 있다.
도어(120는 바디(110)의 일측에 형성된 바디(110) 개구부를 개폐하여, 수납부 내부를 선택적으로 개방할 수 있다. 주행 시 주행방향을 감지하기 위해 바디 하우징(111)은 노출된 카메라(193), 라이다(162) 및 근접센서(161) 등이 주행 방향을 향하도록 위치할 수 있다. 물품을 인입출하는 바디(110) 개구부는 주 주행방향의 반대방향에 위치할 수 있다.
본 발명에서는 바디(110) 내부의 수납부(115)를 개폐하여 물품을 수납 및 수령하는 것에 특징이 있는 바, 도어(120)가 있는 방향을 전방으로 설명하고 그 반대편, 즉 주행방향을 후방이라 한다.
도어(120)는 여닫이 형태로 구동 시 배송로봇(100)의 전방에 충분한 공간이 확보되어야 하므로, 제한된 공간에서 개폐 가능하도록 슬라이드 타입으로 구동될 수 있다. 다만, 배송로봇(100)은 도 3에 도시된 바와 같이 원통형의 바디(110)를 가지며 물품의 원활한 인입출을 위해 전방의 대부분의 면적을 도어(120)로 커버된 바디(110) 개구부로 할애하고 있다.
수납부를 노출시키는 바디(110)의 개구부는 바디(110)의 전면을 모두 차지한다. 도어(120)가 바디의 전면과 평행한 방향으로 슬라이드 이동하는 경우 바디(110)의 좌우 방향으로 공간이 확보되어야 한다.
따라서 본 발명의 배송로봇(100)의 도어(120)는 바디(110)의 외측면에서 최대한 이격되지 않는 궤도를 이루며 회전하여 개방되도록 도어 구동부를 구성할 수 있다.
도어(120)는 바디(110)의 외측면 일부를 구성하는 도어패널(121)을 포함하며, 도어패널(121)을 구동하기 위해 모터(122) 및 링크(128, 129) 등을 포함할 수 있다.
도 3에 도시된 바와 같이 도어패널(121a, 121b, 121c, 121d)은 복수 개를 구비할 수 있으며, 복수 개의 도어패널(121a, 121b, 121c, 121d)은 독립적으로 구동할 수 있다. 복수개의 도어패널(121a, 121b, 121c, 121d)은 바디 하우징(111) 내부의 수납부 구성에 따라 동시에 또는 개별적으로 구동할 수 있다.
출력부(150)는 시각, 청각 또는 촉각 등과 관련된 출력을 발생시킬 수 있는데, 출력부(150)는 시각 정보를 출력하는 광 출력부, 디스플레이 (151) 등을 포함할 수 있으며, 청각 정보를 출력하는 스피커 (152), 비가청 주파수에 속하는 초음파 신호를 출력하는 초음파 출력부 등을 포함할 수 있고, 촉각 정보를 출력하는 햅틱 모듈을 포함할 수 있다.
센서부(160)는 다양한 센서들을 이용하여 배송로봇(100)의 내부 정보, 배송로봇(100)의 주변 환경 정보 및 사용자 정보 중 적어도 하나를 획득할 수 있다.
이때, 센서부(160)는 자율주행을 위해 주변을 인식하기 위한 다양한 종류의 센서를 포함할 수 있다. 대표적으로 거리 감지 센서 또는 근접센서(161)와 라이다(162)를 들 수 있다.
근접센서(161)는 사출한 초음파가 돌아오는 시간을 기초로 근처의 사물을 인식하고 사물과의 거리를 판단하는 초음파 센서를 포함할 수 있다. 근접센서는 둘레를 따라 복수개를 구비할 수 있으며, 상측의 장애물을 감지하기 위해 상측에도 구비할 수 있다.
라이다(Lidar, 162)는 레이저 펄스를 발사하고 그 빛이 주위의 대상물체에 반사되어 돌아오는 것을 받아 주변의 모습을 정밀하게 그려내는 장치이다. 레이다와 같이 그 원리는 유사하나 사용하는 전자기파가 달라 이용 기술과 활용범위가 상이하다.
레이저는 600~1000nm 파장의 빛을 사용하기 때문에 사람의 시력을 손상시킬 수 있다. 라이다(162)는 이보다 더 긴 파장을 이용하며, 대상 물체까지의 거리뿐 아니라 움직이는 속도와 방향, 온도, 주변의 대기 물질 분석 및 농도 측정 등에 쓰인다.
그 외에 센서부(160)는 조도 센서, 가속도 센서, 자기 센서, 자이로 센서, 관성 센서, RGB 센서, 적외선 센서, 지문 인식 센서, 초음파 센서, 광 센서, 홀센서 등을 포함할 수 있다.
주행부(170)는 배송로봇(100)을 이동시키기 위한 수단으로서, 휠 또는 레그를 포함할 수 있으며 이를 제어하는 휠 구동부 및 레그 구동부를 포함할 수 있다.
휠은 빠른 주행을 위한 메인휠(171, 도 14 참조)과 방향전환을 위한 캐스터(173) 그리고 주행 중 적재된 물품(L)이 떨어지지 않도록 안정적인 주행을 위한 보조 캐스터 등을 포함할 수 있다.
통신부(185, Transceiver)는 로봇 관제 시스템(200)과 통신할 수 있는 유무선의 통신 모듈을 포함할 수 있다.
선택적 실시 예로 상기 통신부(185)는 GSM(Global System for Mobile communication), CDMA(Code Division Multi Access), LTE(Long Term Evolution), 5G, WLAN(Wireless LAN), Wi-Fi(Wireless-Fidelity), 블루투스(Bluetooth), RFID(Radio Frequency Identification), 적외선 통신(Infrared Data Association;IrDA), ZigBee, NFC(Near Field Communication) 통신에 관한 모듈을 탑재할 수 있다.
입력부(190)는 사용자로부터 정보를 입력 받기 위한 사용자 입력부(122)를 포함할 수 있다. 선택적 실시 예로 입력부(190)는 영상 신호 입력을 위한 카메라(193), 오디오 신호를 수신하기 위한 마이크로폰(123, "이하, 마이크로 칭함")을 포함할 수 있다. 여기서, 카메라(193)나 마이크(123)를 센서로 취급하여, 카메라(193)나 마이크(123)에서 획득한 신호를 센싱 데이터 또는 센서 정보라고 할 수도 있다.
카메라(193)는 주행방향의 장애물을 감지 하며, 도 3에 도시된 바와 같이 각도가 상이하게 복수 개가 배치될 수 있다. 전방을 넓게 인식하는 카메라와 바닥을 촬영하는 카메라와 같이 촬영 방향이 상이한 복수개의 카메라(193)를 구비할 수 있다.
수납부(115) 내부에 물품의 유무를 감지하기 위해 내부 카메라(195, 도 17 참조)를 더 포함할 수 있다. 내부 카메라(195)는 수납부(115)가 구획되는 경우 구획된 각 수납부(115a, 115b, 115c, 115d)를 모두 감지하기 위해 복수 개를 포함할 수 있다.
또는 상이한 기능을 가지는 카메라를 구비할 수 있다. 예를 들어 광각카메라, 적외선 카메라 등을 구비할 수 있다. 카메라는 센서부(160)로서 주변의 사물을 감지하는 역할을 할 수 있다.
사용자 입력부(192)는 버튼이나 디스플레이(171)와 중첩된 터치패널을 구비할 수 있다. 또는 원격으로 통신부(185)를 통해 사용자 명령을 입력할 수도 있으며, 이 경우 사용자 입력부(192)는 배송로봇(100)과 별도로 구비된 개인 컴퓨터(400)나 원격제어장치를 포함할 수 있다.
사용자 입력부(192)는 사용자 명령을 입력받는 방식을 모두 포함하므로 음성인식을 통해 사용자 명령을 인식할 수 있다. 즉 마이크(173)서 수집한 음성을 분석하여 사용자 명령을 추출하는 음성인식장치도 사용자 입력부(122)로서 역할을 할 수 있다.
입력부(190)는 물품 정보 입력부를 포함할 수 있는데, 상기 물품 정보 입력부는 물품의 사이즈 정보, 무게 정보, 목적지 정보, 운송 의뢰자에 대한 정보 등을 입력받을 수 있다. 이때, 상기 물품 정보 입력부는 코드 리더를 포함할 수 있다.
아울러, 메모리(185)는 인공 지능, 머신 러닝, 인공 신경망을 이용하여 연산을 수행하는데 필요한 정보를 저장할 수 있다. 메모리(185)는 심층 신경망 모델을 저장할 수 있다. 상기 심층 신경망 모델은 학습 데이터가 아닌 새로운 입력 데이터에 대하여 결과 값을 추론해 내는데 사용될 수 있고, 추론된 값은 어떠한 동작을 수행하기 위한 판단의 기초로 이용될 수 있다.
전원공급부(190)는 프로세서(190)의 제어 하에서, 외부의 전원, 내부의 전원을 인가 받아 배송로봇(100)의 각 구성요소들에 전원을 공급한다. 이러한 전원공급부(190)는 배터리(191)를 포함하며, 상기 배터리(191)는 내장형 배터리 또는 교체가능한 형태의 배터리가 될 수 있다. 상기 배터리는 유선 또는 무선 충전 방식으로 충전될 수 있는데, 무선 충전 방식은 자기 유도 방식 또는 자기 공진 방식을 포함할 수 있다.
제어부(180)는 배송로봇(100)의 구성들을 컨트롤하는 모듈이다. 상기 제어부(180)는 프로그램 내에 포함된 코드 또는 명령으로 표현된 기능을 수행하기 위해 물리적으로 구조화된 회로를 갖는, 하드웨어에 내장된 데이터 처리 장치를 의미할 수 있다. 이와 같이 하드웨어에 내장된 데이터 처리 장치의 일 예로써, 마이크로프로세서(microprocessor), 중앙처리장치(central processing unit: CPU), 프로세서 코어(processor core), 멀티프로세서(multiprocessor), ASIC(application-specific integrated circuit), FPGA(field programmable gate array) 등의 처리 장치를 망라할 수 있으나, 본 발명의 범위가 이에 한정되는 것은 아니다.
제어부(180)는 수납부(115)에 배치될 물품(L)의 개수 정보, 무게 정보, 사이즈 정보, 배송 순서 정보, 보안 등급 정보 중 적어도 하나를 수집할 수 있다. 가령, 제어부(180)는 입출력부(170)를 통해 상기 정보들을 수집할 수 있다. 상기 입출력부(170)의 입력은 디스플레이 상의 터치 입력도 포함할 수 있다.
제어부(180)는 수집된 상기 정보들에 기초하여, 수납부(115)에 적재된 물품(L)의 정보를 통신부(185)를 통해 이동 단말(도 1의 200)으로 전송할 수 있다.
본 발명의 도어(120a, 120b, 120c, 120d)는 복수 개를 포함하며, 개폐시 회전반경이 커지지 않도록 좌우로 대칭으로 개폐되도록 좌우방향으로 나뉘어질 수 있다.
좌측의 도어 1개 우측의 도어 1개를 포함하는 2개의 도어로 구성될 수도 있고, 도 3과 같이 4개의 도어(120a, 120b, 120c, 120d)를 포함할 수 있다. 또는, 수직방향으로 3개층으로 나뉘어져 6개의 도어를 구비할 수도 있다.
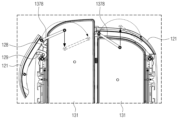
설명의 편의를 위해 상하 2개 층으로 나뉘어져 4개의 도어(120a, 120b, 120c, 120d)로 구성되는 실시예를 기준으로 설명하며, 4개의 도어(120a, 120b, 120c, 120d)는 동시에 또는 개별적으로 구동할 수 있다. 도 4 및 도 5은 본 발명의 일 실시 예에 따른 배송로봇(100)의 도어(120)가 개방된 상태를 도시한 도면이다.
본 발명의 배송로봇(100)은 도 4에 도시된 바와 같이 일부 도어(120b, 120d)만 개방할 수도 있고, 도 5과 같이 모든 도어(120a, 120b, 120c, 120d)가 개방될 수도 있다. 도어(120)의 구동은 내부에 수납부(115)의 구획형태에 따라 달라질 수 있다.
수납부(115)가 파티션(133) 및 중간선반(132)를 통해 4개로 구획되면 각 도어(120a, 120b, 120c, 120d)가 개별적으로 구동하고, 파티션(133)이 생략되면 좌우 도어가 동시에 열려 하나의 수납부를 개방할 수 있다. 도 5의 실시예는 수납부(115) 구획되지 않고 하나의 큰 공간으로 구성된 경우로서, 모든 도어(120a, 120b, 120c, 120d)가 동시에 열릴 수 있다.
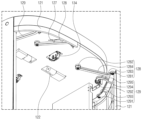
도 6은 본 발명의 일 실시예에 따른 배송로봇(100)의 수납부(115) 내부를 도시한 도면으로 도어패널(121)이 제거된 상태를 도시하고 있다.
배송로봇(100)은 수납부(115)를 상하방향으로 구획하는 중간선반(132)과 좌우방향으로 구획하는 파티션(133)을 포함할 수 있다. 본 실시예의 배송로봇(100)은 중간선반(132)은 한 개, 파티션(133)은 2개를 포함할 수 있으며, 하나의 중간선반(132)과 두 개의 파티션(133)을 이용하여 도 6에 도시된 바와 같이 최대 4개의 수납부(115a, 115b, 115c, 115d)으로 구획할 수 있다.
중간선반(132) 및 파티션(133)은 바디 하우징(111)에 슬라이드 방식으로 탈착 가능하다. 중간선반(132)은 수납부(115)의 수직방향의 중앙에 삽입 가능하며, 중간선반(132)은 수납부(115)를 상부 수납부(115e)와 하부 수납부(115f)로 구획할 수 있다.
여기서 의 수직방향의 중앙은 반드시 수치적으로 상부 수납부(115e)의 높이와 하부 수납부(115f)의 높이가 같다는 의미는 아니다. 다만, 후술할 파티션이 상부 수납부(115e)와 하부 수납부(115f)에 공용으로 이용하기 위해서는 상부 수납부(115e)와 하부 수납부(115f)가 동일한 높이를 가질 수 있다.
중간선반(132)은 적재물건을 지지할 수 있도록 충분한 강성을 가져야 하며 소정의 두께를 가질 수 있다. 중간선반(132)을 지지하기 위해 수납부(115)의 좌우에 돌출된 선반 지지부(135, 도 12 참조)를 포함할 수 있다.
상부 수납부(115e)와 하부 수납부(115f)를 좌우로 구획하는 파티션(133)은 중간선반(132)에 형성된 가이드홈(1323)을 따라 삽입될 수 있다. 파티션(133)은 중간선반(132)과 달리 물품의 무게를 지지하지 않는 바, 두께는 중간선반(132)에 비해 상대적으로 얇게 형성할 수 있다.
한 쌍의 파티션(133)과 모두 결합하기 위해 중간선반(132)은 상면과 하면에 모두 가이드홈(1323)이 형성될 수 있다. 수납부(115)의 상면과 하면에도 파티션(133)이 삽입되는 가이드홈(1125, 도 24 참조)이 형성될 수 있다.
파티션(133)은 가이드홈(1323)을 따라 수납부의 내측, 즉 후방으로 삽입되거나 전방으로 인출될 수 있다. 파티션(133)은 한 쌍이 상부 수납부(115e)와 하부 수납부(115f)에 각각 삽입될 수 있으며, 한 쌍의 파티션(133)은 독립적으로 탈착할 수 있다.
도 7은 본 발명의 일 실시예에 따른 배송로봇(100)의 수납부의 구획 방법을 도시한 개념도이다. 도 7의 (a)와 같이 하나의 중간선반(132)과 두 개의 의 파티션(133)을 이용하여 4개의 수납부(115a, 115b, 115c, 115d)로 구획할 수 있다.
도 7의 (b) 및 (c)와 같이 하나의 중간선반(132)과 하나의 파티션(133)을 이용하여 상부 수납부(115e)와 하부 수납부(115f) 중 일측은 연결된 공간으로 타측은 구획된 공간으로 이용할 수 있다.
또는 도 7의 (d)와 같이 상부 수납부(115e)와 하부 수납부(115f) 2개 공간으로만 구획할 수 있고, 도 7의 (e)와 같이 중간선반(132)과 파티션(133)을 모두 제거하여 큰 수납부(115)를 이용하여 이불과 같이 부피가 큰 물건을 배송할 수 있다.
수납부(115)를 구획하면 수납 가능한 물품의 개수가 증가할 수 있으며, 작은 물건을 배송하는 경우 여러 목적지로 복수개의 물건을 한번에 배송할 수 있다.
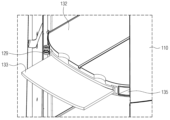
중간선반(132)이 삽입되어 상부 수납부(115e)와 하부 수납부(115f)가 구획된 경우 하부 수납부(115f)는 중간선반(132)에 가려서 내부가 보이지 않아 물건을 적재 또는 하차하기 위해 허리를 숙여야 한다. 이러한 불편함을 해소하고자 도 4에 도시된 바와 같이 하부에 슬라이딩 선반(131)이 전방으로 돌출되며 하부 선반에 적재된 물건을 쉽게 수령할 수 있다.
도 7의 (e)와 같이 수납부(115)가 구획되지 않은 경우 제어부(180)는 도 5와 같이 4개의 도어(120)를 동시에 개방하고 도 7의 (a) 내지 (d)와 같이 구획된 경우 제어부(180)는 다른 수납부(115)는 개방하지 않고, 선택된 수납부(115)만 개방하도록 도어(120)를 제어할 수 있다.
도 8은 본 발명의 일 실시예에 따른 배송로봇(100)의 도어 구동부(122, 1231, 1232, 124, 125, 128, 129)를 도시한 평면도이다. 좌측은 열린 상태 우측은 닫힌 상태를 도시하고 있다. 도어 구동부는 좌우방향으로 배치된 한 쌍의 도어패널(121a, 121b)을 각각 구동하기 위해 각각 구비될 수 있다.
또한, 도어(120)는 상하로도 나뉘어져 있으므로 상부 수납부(115e)를 커버하는 상부도어(120a, 120b)의 도어 구동부는 도어패널(121a, 121b)의 상측, 즉 수납부(115)의 상부에 위치할 수 있다. 하부 수납부(115f)를 커버하는 하부 도어(120cc, 120d)의 도어 구동부는 도어패널(121c, 121d)의 하측, 즉 수납부(115)의 하부에 위치할 수 있다.
본 발명의 도어(120)는 닫힌 상태에서 상기 바디 수납부(115)를 커버하며 상기 바디 하우징(111)의 일측의 적어도 일부를 구성하는 도어패널(121), 제1 단부(end, 1281)는 도어패널(121)에 회전 가능하게 결합하고 제2 단부는 바디 하우징(111)에 회전 가능하게 결합된 제1 도어링크(128), 및 제1 도어링크(128)에 회전력을 제공하는 모터(122)를 포함한다.
도어 구동부는 구동부 플레이트(125) 상에 배치될 수 있으며, 일부 구성은 구동부 플레이트(125)의 일면에 나머지 구성은 타면에 배치하거나, 모터(122)와 같이 두께가 있는 부재는 도어 구동부 플레이트(125)에 홀을 형성하여 배치할 수 있다.
본 실시예는 도 8에 도시된 바와 같이, 풀리(1231, 1232), 평벨트(124) 및 도어센서(1641, 1642)는 구동부 플레이트(125)의 일면에 도어링크(128, 129)는 구동부 플레이트(125)의 타면에 위치할 수 있다. 모터(122)는 두께를 고려하여 구동부 플레이트(125)에 홀을 형성하여 배치할 수 있다. 도어링크(128, 129)가 위치하는 구동부 플레이트(125)의 타면은 수납부(115)를 향하여 배치된다.
수납부(115)는 도어링크(128, 129) 및 후술할 슬라이딩 선반(131)의 구동부를 커버 위해 수납부 하우징(112, 도 24 참조)을 포함할 수 있다. 수납부 하우징(112)은 바닥면을 구성하는 수납부 베이스(1123, 도 24 참조)와 상면을 구성하는 수납부 실링(1122, 도 18 참조)을 포함할 수 있다. 도어링크는 수납부 베이스(1123)의 하부에 수납부 실링(1122)의 상부에 위치할 수 있다.
도어패널(121)은 바디 수납부(115)를 커버하는 부재로서 닫힌 상태에서 바디 하우징(111)과 연속적인 면을 형성하여 바디(110)의 외관을 구성할 수 있다. 도어패널(121)은 물건을 수납 및 수령이 용이하도록 바디 하우징(111)의 전면에서 좌우 방향으로 조금 더 넓게 형성할 수 있다.
도어패널(121)은 바디 하우징(111)의 전면 보다 더 연장되어 측면 방향으로 꺾어질 수 있다. 이하에서는 설명의 편의를 위해 도어패널(121)의 닫히는 방향의 엣지를 제1 도어엣지(1211), 도어패널(121)의 열리는 방향의 엣지를 제2 도어엣지(1212)라 한다.
모터(122)는 링크와 직접 연결될 수도 있으나, 도 9에 도시된 바와 같이 한 쌍의 풀리(1231, 1232)와 한 쌍의 풀리(1231, 1232)를 감싸는 평벨트(124)를 포함할 수 있다. 평벨트(124)는 한 쌍의 풀리(1231, 1232)를 동기화 시킨다. 모터(122)와 연결된 제1 풀리(1231)는 회전하며 평벨트(124)는 제1 풀리(1231)의 외주면을 따라 이동한다.
평벨트(124)를 통해 회전력이 전달되어 제2 풀리(1232)가 회전하고 제2 풀리(1232)는 제1 도어링크(128)의 제2 단부(1282)와 결합한다. 제1 도어링크(128)는 제2 풀리(1232)의 회전에 따라 제2 풀리(1232)의 회전축을 중심으로 회동하며 제1 도어링크(128)의 제1 단부(1281)는 제2 풀리(1232)의 회전축을 중심으로 하는 호를 그리며 회전할 수 있다.
이하에서 설명의 편의를 위해 제1 도어링크(128)가 도어패널(121)이 열리는 방향으로 회전하는 방향을 제1 회전방향, 도어패널(121)이 닫히는 방향으로 제1 도어링크(128)가 회전하는 방향을 제2 회전방향이라 한다.
도어(120)의 좌우 방향에 따라 제1 회전방향은 시계방향이 될 수 도 있고, 반시계 방향이 될 수도 있다. 도 8의 좌측에 도시된 제1 도어링크(128)의 제1 회전방향은 반시계 방향, 제2 회전방향은 시계방향이다.
평벨트(124)는 벨트에 돌기가 형성되지 않은 테이프 형상을 가지며 제1 풀리(1231)와 제2 풀리(1232)의 외측면에도 톱니가 형성되어 있지 않다. 평벨트(124)와 제1 풀리(1231) 및 제2 풀리(1232) 사이의 마찰력을 이용하여 평벨트(124)가 이동할 수 있으며 마찰력보다 큰 외력이 가해지면 평벨트(124)는 제2 풀리(1232)와 슬립이 일어날 수 있다.
도어(120)에 물건이나 손이 끼인 경우 도어패널(121)이 움직이지 못하여 제2 풀리(1232)가 회전할 수 없다. 제2 풀리(1232)의 회전이 제한되면, 평벨트(124)와 슬립이 발생한다. 즉, 모터(122)가 제1 풀리(1231)를 회전 시키더라도 제2 풀리(1232)는 회전하지 않을 수 있다.
돌기가 형성된 벨트를 이용하면 물건이 끼어 도어패널(121)이 멈춘 경우 모터(122)가 회전하지 못하여 역기전력이 가해지는 문제가 있다. 평벨트(124)와 제2 풀리(1232) 사이에 슬립이 가능하여 모터(122)에 역기전력에 의한 고장을 방지할 수 있다.
제1 풀리(1231)의 직경을 제2 풀리(1232)보다 작게 형성하여 모터의 회전수와 제2 풀리의 이동량을 맞출 수 있다. 제1 풀리(1231)는 도어(120)가 닫힌 상태에서 열린 상태까지 전환하는데 약 120° 정도만 회전할 수 있으며, 제1 풀리(1231)는 제2 풀리(1232)보다 작으므로 복수 회 회전할 수 있다.
제2 풀리(1232)는 외주면에서 돌출된 센싱돌기(1233)를 포함할 수 있다. 센싱돌기(1233)는 제2 풀리(1232)의 회전에 따라 위치가 달라질 수 있으며, 닫힌 상태에서 센싱돌기(1233)와 접하는 닫힘감지센서(1641)와 열린 상태에서 센싱돌기(1233)와 접하는 열림감지센서(1642)를 포함할 수 있다.
도 8의 우측의 도어패널(121)은 닫힌상태로 우측의 제2 풀리(1232)의 센싱돌기(1233)는 닫힘감지 센서와 닿은 상태이다. 제어부(180)는 닫힘감지센서(1641)가 ON되면 도어패널(121)이 바디 개구부를 완전히 커버한 것으로 판단하고 배송로봇(100)을 주행할 수 있다.
한편, 좌측의 도어패널(121)은 열린 상태로 좌측 센싱돌기(1233)는 열림감지센서(1642)와 닿은 상태이다. 제어부(180)는 열림감지센서(1642)가 ON이 된 것을 감지하여 도어패널(121)이 완전히 열린 것으로 판단하고 슬라이딩 선반(131)을 인출할 수 있다.
제1 도어링크(128)의 제1 단부(1281) 는 도어패널(121)에 회전 가능하게 결합할 수 있다. 상부도어(120a, 120b)의 도어 구동부는 수납부(115)의 상측에 위치하므로 도어패널(121)의 상단에 제1 도어링크(128)의 제1 단부(1281)가 결합할 수 있다. 하부도어(120c, 120d)의 도어 구동부는 수납부(115)의 하측에 위치하는 바, 도어패널(121)의 하단에 제1 도어링크(128)의 제1 단부(1281)가 결합할 수 있다.
본 발명은 도어패널(121)이 열리면서 바디 하우징(111)의 외측면을 따라 측방향으로 각도가 변화하면서 슬라이딩하도록 구성하여 도어패널(121)이 바디 하우징(111)과 간섭되는 것을 방지할 수 있다.
제1 도어링크(128)가 도어패널(121)을 오픈 시 도어패널(121)이 향하는 방향을 전환하며 슬라이딩 오픈 되도록, 제2 도어링크(129)를 더 포함할 수 있다. 제2 도어링크(129)는 제1 도어링크(128)에 의해 도어패널(121)이 측방향으로 밀리는 힘을 회전력으로 전환하여, 도어패널(121)의 제2 엣지가 바디(110)의 후방으로 향하도록 가이드 한다.
도어패널(121)의 제1 도어엣지(1211)는 닫힌 상태에서 바디 개구부의 중앙에 열린 상태에서 바디 개구부의 측방향에 위치할 수 있다. 제1 도어링크(128)의 제1 단부(1281)는 닫힌 상태에서 열린 상태로 전환 시 바디 하우징(111)과 간섭 없이 바디 개구부를 따라 이동하기 위해 도어패널(121)의 제1 도어엣지(1211)에 결합할 수 있다.
제2 도어링크(129)의 제1 단부(1291)는 도어패널(121)에 결합하고 제2 단부는 바디 하우징(111)에 결합하며, 제2 도어링크(129)의 제1 단부(1291) 및 결합하고 제2 단부는 제1 도어링크(128)의 제1 단부(1281) 및 제2 단부(1282)와 이격된 위치에서 도어패널(121) 및 바디 하우징(111)에 연결된다.
도 8에 도시된 바와 같이 제2 도어링크(129)의 제1 단부(1291)는 도어패널(121)의 꺾어진 부분, 즉 전면에 위치하는 도어 전면부와 측면면에 위치하는 도어 측면부 사이에 체결될 수 있다.
제1 도어링크(128)에 의해 도어패널(121)이 측방향으로 이동 시 제2 도어링크(129)는 회전하면서 도어패널(121)의 각도를 변경시킬 수 있다. 제2 도어링크(129)는 제1 도어링크(128)와 같은 방향으로 회전하며, 도어패널(121)은 한 쌍의 도어링크(128, 129)의 연동을 통해 닫힌 상태와 열린 상태로 전환할 수 있다.
도 9는 본 발명의 일 실시 예에 따른 배송로봇(100)의 링크의 동작을 설명하기 위한 개념도이다. 좌측은 열린 상태이고 우측은 닫힌 상태를 도시하고 있다.
제1 도어링크(128)와 제2 도어링크(129)는 절곡된 형상을 가지고 있으나, 각 링크의 단부(1281, 1282, 1291, 1292) 사이의 간격(L1, L2)은 일정하다. 또한, 제1 도어링크(128)의 제1 단부(1281)와 제2 도어링크(129)의 제1 단부(1291)는 도어(120)에 결합되어 제1 거리(D1)가 일정하고, 제1 도어링크(128)의 제2 단부(1282)와 제2 도어링크(129)의 제2 단부(1292)는 바디 하우징(111)에 결합되어 제2 거리(D2)가 일정하다.
제1 거리(D1)와 제2 거리(D2)가 고정되어 있고 제1 간격(L1)과 제2 간격(L2)일정하므로 제1 거리(D1), 제2 거리(D2), 제1 간격(L1) 및 제2 간격(L2)을 4개의 변으로 하는 사각형을 이루며 사각형의 내각이 변화하면서 형상이 변화하는 형태로 제1 도어링크(128)와 제2 도어링크(129)가 회전한다.
닫힌 상태에서 열린 상태로 전환 시, 제1 도어링크(128)는 모터(122)의 회전력을 받아 제1 단부(1281)가 제1 궤적(T1)을 그리며 회전한다. 제1 도어링크(128)는 도어패널(121)을 바깥쪽 방향(열리는 방향)으로 밀고, 제2 도어링크(129)는 도어패널(121)에 결합된 제1 단부(1291)가 제1 도어링크(128)의 제1 단부(1281)와 제1 거리(D1)를 유지하면서 제2 궤적(T2)을 따라 회전한다.
도 10은 제1 도어링크(128)의 제1 간격(L1)과 제2 도어링크(129)의 제2 간격(L2)에 따른 도어(120)의 궤도를 도시한 도면으로 (a)는 도 9의 실시예에 따른 제1 도어링크(128)의 양 단부는 제1 간격(L1)을 이루도록 배치되고 제2 도어링크(129)의 양 단부는 제2 간격(L2)을 가지도록 배치된 도면이다. (b)는 제1 간격(L1')이 (a)의 실시예 보다 긴 경우이고, (c)는 제2 간격(L2”)이 (a)의 실시예 보다 긴 경우를 도시하고 있다.
(b)와 같이 (a)의 실시예보다 제1 도어링크(128)의 제1 간격(L1')이 길고 제2 도어링크(129)의 제2 간격(L2')이 짧으면 도어(120)의 제1 도어엣지(1211)의 회전반경이 길어져 도어(120)가 슬라이드 이동하지 않고 여닫이 문과 같이 회전하며 열릴 수 있다.
(c)와 같이 (a)의 실시예보다 제2 도어링크(129)의 제2 간격(L2”)이 길면 도어패널(121)의 수평상태를 유지하며 측방향으로 도어(120)가 오픈될 수 있다.
도 10의 (b)와 같이 제1 간격(L1')의 길이가 너무 길면 여닫이 도어(120)가 되고, 도 10의 (c)와같이 제1 간격(L1”)이 제2 간격(L2”)보다 짧으면 도어패널(121)이 수평방향을 유지하며 회동하거나 오히려 제2 도어엣지(1212)가 전방으로 돌출될 수 있다.
도어패널(121)의 슬라이드 이동 시 제2 도어엣지(1212)가 후방으로 밀리면서 바디 하우징(111)의 측면에 가깝게 이동하기 위해서는 (a)와 같이 제1 도어링크(128)의 제1 간격(L1)은 제2 도어링크(129)의 제2 간격(L2)보다 조금 긴 정도가 적절하다.
도 11은 본 발명의 일 실시 예에 따른 배송로봇(100)의 도어 구동부를 하측에서 바라본 도면이다. 도 11을 참조하면, 제1 도어링크(128)는 제1 단부(1281)에 위치하는 제1 부분(1283)과 제2 단부(1282) 방향에 위치하는 제2 부분(1284)이 소정의 각도를 이루며 꺾인 형태를 가질 수 있다. 제1 부분(1283)은 제1 단부(1281)에 인접한 위치로 제2 부분(1284)에 비해 상대적으로 짧은 길이를 가진다.
제1 도어링크(128)의 제1 단부(1281)는 도어패널(121)의 제1 도어엣지(1211)에 결합되므로 도어(120)가 개방된 상태에서 제1 도어링크(128)의 제1 부분(1283)이 외측으로 노출된다. 외측으로 노출되는 제1 부분(1283)이 가능한 최소로 보이도록 도어패널(121)의 내측면에 가깝게 배치하는 것이 바람직하다.
도 8에 도시된 바와 같이 제1 도어링크(128)의 제1 부분(1283)은 도어패널(121)의 제1 도어엣지(1211)를 향해 꺾어지도록 구성할 수 있다. 제1 단부(1281)는 닫힌 상태에서 도어패널(121)의 내측면과 평행하게 배치되도록 구성하고 열린 상태에서는 회전하므로 도어패널(121)의 내측면에서 이격되나 제1 부분과 제2 부분(1284)이 직선인 상태보다 도어패널(121)에 인접하여 외측으로 노출되는 정도를 감소시킬 수 있다.
제2 도어링크(129)는 U형으로 꺾여 제1 단부(1291)와 제2 단부(1292)가 같은 방향을 향할 수 있다. 제2 도어링크(129)의 제2 단부(1292)는 도 8에 도시된 바와 같이 열린 상태에서 바디 하우징(111)의 측방향에 위치할 수 있으며 도어의 제2 엣지(1212)를 후방으로 이동시킨다.
제2 도어링크(129)가 바디 하우징(111)과 간섭 없이 배치되려면, 제2 도어링크(129)는 U자로 휘어진 절곡부(1295, 도 11)를 포함하고 제1 단부(1291)와 제2 단부(1292)가 같은 방향을 향할 수 있다.
제1 단부(1291)를 포함하는 제1 부분(1293)은 제2 도어링크(129)의 회전운동을 주도하는 부분이므로 제2 단부(1292)를 포함하는 제2 부분(1294) 보다 길고 제2 부분(1294)은 바디 하우징(111)과 간섭을 피할 수 있는 길이를 가질 수 있다. 도어(120)가 열린 상태에서 도 8의 좌측의 도어(120b)와 같이 제2 도어링크(129)의 제1 부분(1293)과 제2 부분(1294) 사이에 바디 하우징(111)이 위치할 수 있다.
제2 도어링크(129)는 모터(122)와 직접적으로 연결되지 않으나, 도어패널(121)이 흔들리지 않고 정해진 궤도로 열리도록 가이드한다. 제1 도어링크(128)는 모터(122)의 배치로 인하여 도어패널(121)의 상측 또는 하측에만 위치하나 제2 도어링크(129)는 도어패널(121)의 상측과 하측에 모두 결합할 수 있다(도 5 참조).
즉, 제2 도어링크(129)는 수납부(115)의 상측 및 하측 외에 중간에 위치할 수 있다. 도 6을 참고하면 수납부(115)의 중간에 위치하는 제2 도어링크(129)는 한 쌍이 상하방향으로 배치되어 하나는 상부도어(120a, 120b)와 다른 하나는 하부도어(120c, 120d)와 연결될 수 있다.
도 6을 참고하면 제2 도어링크(129)는 중간선반(132)의 양측에 위치할 수 있으며, 중간선반(132)은 제2 도어링크(129)가 회전할 수 있는 공간을 제공하기 위해 좌우에 홈을 포함할 수 있다.
중간선반(132)이 분리된 경우 제2 도어링크(129)가 노출되지 않도록 제2 도어링크(129)를 커버하기 위한 링크커버(1351)를 더 포함할 수 있으며, 링크커버(1351)는 중간선반(132)을 지지하는 선반 지지부(135)로서 역할을 할 수 있다(도 12 참조).
도어 구동부는 평벨트(124)를 이용하므로 제2 풀리(1232)와 평벨트(124) 사이에 슬립이 일어나면서 도어패널(121)이 열릴 수 있다. 또한, 물품수령자가 아닌 제3 자가 도어(120)를 강제로 열어서 물품을 가져갈 수 있다.
따라서 도어(120)를 잠그는 잠금장치가 필요하며, 도 11에 도시된 바와 같이 제1 도어링크(128)의 회전을 제한하는 잠금레버(127)를 구비할 수 있다. 잠금레버(127)는 선택적으로 제1 도어링크(128)의 궤적 상에 인입출 될 수 있다. 잠금 상태에서 열림 상태로 회전하지 못하도록 잠금 상태에서 열림 상태로 전환하는 제1 회전방향에 잠금레버(127)가 위치할 수 있다.
잠금레버(127)가 선택적으로 제1 도어링크(128)의 제1 회전방향에 위치하도록 제어하는 잠금모터(122)는 닫힘감지센서(1641)가 ON되는 경우 구동하여 잠금레버(127)를 돌출시키고, 도어(120)열림 명령이 입력된 경우 제1 도어링크(128)가 제1 회전방향으로 회전 가능하게 잠금모터(122)는 잠금레버(127)를 인입할 수 있다(도 11의 우측 도어(120b) 참고).
이는 배송로봇(100)의 작도오류로 인하여 도어(120)가 구동하지 못하는 경우 수동으로 도어(120)를 개방해야 하는 비상상황에서 잠금을 해제하기 위해 잠금레버(127)는 수동으로 인입할 수 있다. 도어패널(121)의 상단 또는 하단에 자와 같이 얇고 긴 부재를 넣어 잠금레버(127)를 밀면 잠금레버(127)가 제1 도어링크(128)와 간섭이 없도록 인입되며 수동으로 도어패널(121)을 개방할 수 있다.
도 6 내지 도 7에서 살펴본 바와 같이 본 발명의 수납부(115)를 상하로 구획하는 중간선반(132)과 좌우로 구획하는 파티션(133)을 포함할 수 있으며, 중간선반(132)과 파티션(133)은 선택적으로 바디 하우징(111)에 결합할 수 있다. 이하에서는 중간선반(132) 및 파티션(133)의 결합 방법에 대해 구체적으로 살펴보도록 한다.
도 12는 본 발명의 일 실시예에 따른 배송로봇(100)의 중간선반(132)의 결합방법을 도시한 도면이다. 도 12에 도시된 바와 같이 중간선반(132)은 전방에서 슬라이드 방식으로 삽입하여 결합할 수 있다.
중간선반(132)을 지지하는 선반 지지부(135)는 수납부(115)에 양 측방향에 배치될 수 있다. 중간선반(132)은 좌우 측방향에서 오목하게 인입되어, 선반레일(1325)을 포함하며, 선반레일(1325)에 선반 지지부(135)가 위치한 상태로 중간선반(132)가 삽입될 수 있다. 선반레일(1325)은 선반 지지부(135)의 돌출된 높이에 상응한 깊이로 인입될 수 있다.
전술한 바와 같이 제2 도어링크(129)는 수납부(115)의 상부와 하부뿐만 아니라 수납부(115)의 중간에 위치할 수 있으며, 중간선반(132)의 좌우 방향에 배치될 수 있다.
중간선반(132)을 수납부(115)에 체결시 제2 도어링크(129)와 간섭이 일어나지 않도록 선반 지지부(135)는 제2 도어링크(129)를 커버하는 링크커버(1351)를 포함할 수 있다. 링크커버(1351)는 제2 도어링크(129)가 파손되지 않도록 보호하며, 도 12와 같이 중간선반(132)을 수납부(115)에서 제거한 상태에서 링크커버(1351)는 제2 도어링크(129)가 외부로 노출되는 것을 최소화 할 수 있다. 링크커버(1351)는 선반 지지부(135)의 바디 개구부와 인접한 전방에 배치될 수 있다.
제2 도어링크(129)의 가동범위에 상응하여 링크커버(1351)는 돌출될 수 있다. 중간선반(132)의 선반레일(1325)은 링크커버(1351)의 전 구간을 통과할 수 있어야 하는 바, 선반레일(1325)은 링크커버(1351)의 돌출된 높이에 상응하는 깊이를 가질 수 있다.
중간선반(132)의 장착여부를 감지하기 위해 선반 지지부(135)는 탄성센서(134)를 구비할 수 있다. 탄성센서(134)는 중간선반(132)이 삽입되면 가압되어 눌리면서 중간선반(132)이 선반 지지부(135)에 결합된 것을 감지할 수 있다.
후술할 파티션(133)의 장착여부를 감지하기 위해서도 탄성센서(134)를 이용할 수 있으며, 두 탄성센서를 구분하기 위해 중간선반(132)의 장착을 감지하는 탄성센서를 제1 탄성센서(134a)라 하고, 파티션(133)의 탄성센서를 제2 탄성센서(134b)라 한다. 제1 탄성센서(134a)와 제2 탄성센서(134b)는 배치위치의 차이만 있을 뿐 도 13에 도시된 구성은 동일하게 구성할 수 있다.
제1 탄성센서(134a)는 중간선반(132)이 완전히 삽입 시 인식할 수 있도록 선반 지지부(135)의 내측에 위치할 수 있다. 제1 탄성센서(134a)는 수납 지지부(135)의 내측에 위치하고, 탄성래치(1344) 부분만 수납 지지부(135)에서 돌출될 수 있다. 이하, 제1 탄성센서(134a)가 위치하는 선반 지지부(135)의 내측부분(후방)을 센서커버(1352)라 한다.
센서커버(1352)는 중간선반(132)의 선반레일(1325)의 내측면과 맞닿아 신호를 생성한다. 선반레일(1325)은 수납 지지부(135)의 전단에 위치하는 링크커버(1351)의 돌출높이에 상응하는 깊이로 인입되어 있는 바, 센서커버(1352)도 링크커버(1351)와 동일한 높이로 돌출될 수 있다.
선반 지지부(135)의 센서커버(1352)와 링크커버(1351) 사이에 위치하는 부분(1353)은 센서커버(1352) 및 링크커버(1351)와 동일한 높이를 가질 수도 있으나, 도 5와 같이 중간선반(132)을 제거 시 수납부(115)의 공간을 최대로 활용하기 위해 센서커버(1352)와 링크커버(1351) 사이에 위치하는 부분(1353)은 오목하게 인입된 형태를 가질 수 있다.
도 13은 본 발명의 일 실시예에 따른 배송로봇(100)의 탄성센서(134)를 도시한 분해도이고, 도 14는 본 발명의 일 실시예에 따른 배송로봇(100)의 제1 탄성센서(134a)의 동작을 도시한 도면이다.
도 13을 참조하면 탄성센서(134)는 센서 하우징(1341), 탄성래치(1344), 토션 스프링(1343) 및 스위치(1345)를 포함할 수 있다. 탄성래치(13144)는 곡면을 포함하는 판형 부재로서, 센서 하우징(1341)의 외측으로 노출된 부분만 곡면을 포함하면 되나, 본 실시예는 원형으로 형성하였다.
탄성래치(1344)에 곡면이 없으면 중간선반(132)의 단부가 걸려 삽입될 수 없으므로 도 14의 (a)에 도시된 바와 같이, 중간선반(132)이 슬라이드 삽입 되면서 탄성래치(1344)의 곡면과 닿으면, 탄성래치(1344)를 인입하는 방향으로 힘이 전환되며 탄성래치(1344)가 센서 하우징(1341)으로 인입될 수 있다.
센서 하우징(1341)에 형성된 가이드 슬롯(1342)에 삽입되는 가이드 돌기(1346)를 포함한다. 가이드 돌기(1346)가 가이드 슬롯(1342)을 따라 이동하면서 탄성래치(1344) 센서 하우징(1341)에서 노출된 정도가 달라질 수 있다.
토션 스프링(1343)은 탄성래치(1344)는 센서 하우징(1341)의 바깥쪽 방향으로 가압하여 도 14의 (a)와 같이 가이드 돌기(1346)가 가이드 슬롯(1342)의 일측 단부(도면상 하측) 방향에 위치시킨다. 도 14의 (b)와 같이 외력이 가해져 탄성래치(1344)가 가압되면 토션 스프링(1343)은 변형되고 탄성래치(1344)는 센서 하우징(1341)로 인입된다.
탄성래치(1344)는 가이드 슬롯(1342)에 삽입되는 가이드 돌기(1346)에 의해 눌려 신호를 발생하는 스위치(1345)를 포함할 수 있다. 도 14의 (b)와 같이 탄성래치(1344)가 가압되면 가이드 돌기(1346)가 가이드 슬롯(1342)의 연장방향을 따라 이동하다 스위치(1345)를 누를 수 있다.
중간선반(132)의 단부가 닿으면서부터 스위치(1345)가 ON되므로 제1 락킹홈(1326)은 중간선반(132)의 후단부에 인접하게 배치할 수 있다.
탄성래치(1344)의 돌출면 형상에 상응하여 중간선반(132)에 형성된 제1 락킹홈(1326)을 포함할 수 있다. 도 14의 (b)에 도시된 바와 같이 제1 락킹홈(1326)이 탄성래치(1344) 위치에 도달하면 토션 스프링(1343)이 탄성래치(1344)를 가압하여 탄성래치(1344)가 돌출되며, 제1 락킹홈(1326)에 탄성래치(1344)가 삽입될 수 있다.
탄성래치(1344)는 중간선반(132)이 접하지 않은 상태에서는 최대로 돌출되고, 중간선반(132)의 단부가 닿으면 인입된다. 탄성래치(1344)는 제1 락킹홈(1326)에 도달하기 전까지는 중간선반(132)의 선반레일(1325)과 맞닿아 최대로 가압된 상태를 유지하고, 제1 락킹홈(1326)에 도달하면 제1 락킹홈(1326)의 깊이만큼 돌출될 수 있다.
중간선반(132)을 전방으로 소정크기 이상의 힘으로 당기면 탄성래치(1344)가 눌리면서 제1 락킹홈(1326)과 분리도리 수 있다. 대형사이즈의 수납부(115)로 구성하기 위해 중간선반(132)을 수납부(115)에서 제거가 필요하면 수동으로 중간선반(132)을 당겨 수납부(115)로부터 뺄 수 있다.
도 15는 본 발명의 일 실시예에 따른 배송로봇(100)의 중간선반(132)의 측면도와 저면도이다. 도 15의 (a)는 측면도로서, 상측이 후방이고, 하측이 전방이며, 선반레일(1325)의 내측면이 도시되어 있다. 전술한 바와 같이 탄성래치(1344)가 삽입되는 제1 락킹홈(1326)은 선반레일(1325)의 후방에 배치될 수 있다.
제1 탄성센서(134a)는 중간선반(132)의 삽입여부를 감지하는 것과 동시에 중간선반(132)이 전후방향으로 이동하는 것을 방지할 수 있으나, 물건이 탑재되는 선반이므로 보다 안정적인 고정을 위해 선반레일(1325)의 전방에 선반후크(1327)를 더 포함할 수 있다. 선반후크(1327)에 대응하여 선반 지지부(135)에도 도 12에 도시된 바와 같이, 고정후크(1355)를 포함할 수 있다. 고정후크(1355)는 선반레일(1325)의 내측면과 닿도록 링크커버(1351)에 형성될 수 있다.
본 발명의 중간선반(132)의 일면(1321)은 도 12에 도시된 바와 같이 편평한 면을 가지나, 타면(1322)은 도 15의 (b)와 같이 컵홀더(1324)를 포함할 수 있다. 컵은 바닥면적 대비 높이가 높아 배송로봇(100) 이동 시 전도 위험이 있는 바, 컵의 전도방지를 위해 중간선반(132) 자체에 컵홀더(1324)를 구비할 수 있다.
중간선반(132)의 타면에서 컵홀더(1324) 부분이 원형으로 일면(1321)방향으로 인입될 수 있으며, 다양한 사이즈의 컵홀더(1324)를 구비할 수 있다. 도 15의 (b)와 같이 좌우의 선반레일(1325)부분은 측방향에서 인입되므로 컵홀더(1324)를 형성할 수 없다.
도 16은 본 발명의 일 실시예에 따른 배송로봇(100)의 수납부에 파티션(133)을 삽입하는 방법을 도시한 도면이고, 도 17은 본 발명의 일 실시예에 따른 배송로봇(100)의 수납부 내부를 도시한 단면도이다.
중간선반(132)을 삽입하여 상부 수납부(115e)와 하부 수납부(115f)로 구획할 수 있다. 상부 수납부(115e) 또는 하부 수납부(115f)의 중간에 파티션(133)을 삽입하여 추가적으로 수납부(115)를 좌우로 구획할 수 있다. 작은 물품의 경우 수납부(115)를 구획하면 다양한 배송지로 배송이 가능하다.
파티션(133)은 직사각형의 형상을 가지고 있으며, 4개 변의 길이가 모두 같을 수 있으나, 본 실시예는 제1 방향의 길이와 제2 방향의 길이가 상이할 수 있다. 도 17에서 상하 방향에 위치하는 변을 제1 변(1331)과 제2 변(1332)이라하고, 전후 방향에 위치하는 변을 제3 변(1333)과 제4 변(1334)이라 하며, 제1 변(1331)과 제2 변(1332)이 길이가 제3 변(1333)과 제4 변(1334)의 길이보다 더 길 수 있다.
제3 변(1333) 및 제4 변(1334)의 길이는 상부 수납부(115e) 또는 하부 수납부(115f)의 수직방향의 길이에 상응하고, 제1 변(1331)과 제2 변(1332)의 길이는 수납부(115)의 전후방향의 길이에 상응 할 수 있다.
중간선반(132)은 중앙에 형성된 파티션홈(1323)을 따라 파티션(133)이 삽입되며, 파티션홈(1323)은 중간선반(132)의 일면과 타면에 모두 형성될 수 있다. 또한 수납부(115)의 천장(1122)과 베이스부(1123)에도 파티션(133)이 삽입되는 파티션홈(1125)이 형성될 수 있다. 중간선반(132)의 파티션홈(1323)과 수납부(115)의 파티션홈(1323)을 구분하기 위해 중간선반(132)의 파티션홈(1323)을 제1 파티션홈(1323), 수납부(115)의 파티션홈(1323)을 제2 파티션홈(1125)이라 한다.
파티션(133)의 제1 변(1331)과 제2 변(1332)은 파티션홈(1323)을 따라 수납부(115)의 내측으로 슬라이드 이동하고, 파티션(133)의 장착여부를 감지하기 위해 제2 탄성센서(134b)를 포함할 수 있다.
제2 탄성센서(134b)는 전술한 중간선반(132)의 제1 탄성센서(134a)와 같은 부재를 이용할 수 있다. 즉 제2 탄성센서(134b)도 도 13에 도시된 센서 하우징(1341), 탄성래치(1344), 토션스프링, 가이드 슬롯(1342), 스위치(1345) 및 스위치(1345)를 포함할 수 있다.
파티션(133)에 형성된 제2 락킹홈(1335)에 제2 탄성센서(134b)의 탄성래치(1344)가 삽입되면 제어부(180)는 파티션(133)의 장착을 감지할 수 있다. 또한, 제2 탄성센서(134b)와 제2 락킹홈(1335)은 파티션(133)이 파티션홈(1323)을 따라 역방향으로 인출되지 않도록 고정할 수 있다.
중간선반(132)에 위치하는 제1 파티션홈(1323)에 제2 탄성센서(134b)를 배치 시 신호 연결이 어려우므로 도 17에 도시된 바와 같이 제2 탄성센서(134b)는 바디 하우징(111)에 위치하는 제2 파티션홈(1125)에 형성할 수 있다. 즉 수납부(115)의 상부와 하부에 위치한다.
하나의 제2 탄성센서(134b)와 제2 락킹홈(1335)으로 파티션(133)을 고정 시 고정력이 약할 수 있으므로, 도 17에 도시된 바와 같이 전 후 방향으로 한 쌍의 제2 탄성센서(134b, 134c)를 배치하고, 제2 락킹홈(1335)도 제1 변(1331) 및 제2 변(1332)에 각각 한 쌍씩 형성할 수 있다.
하나의 파티션(133)에 형성된 제2 락킹홈(1335)의 위치가 대칭을 이루도록 구성하여 파티션(133)이 삽입되는 방향에 상관없이 제2 락킹홈(1335)에 제2 탄성센서(134b, 134c)가 체결될 수 있다.
파티션(133)의 장착여부를 감지하는 제2 탄성센서(134b)는 하나만 구비하더라도 장착을 감지하기 충분하다. 따라서, 수납부(115) 내측에 위치하는 제2 탄성센서(134b)만 스위치(1345)를 구비하고 수납부(115) 외측에 위치하는 제2 탄성센서(134c)는 스위치(1345)를 생략하고 센서 하우징(1341), 탄성래치(1344) 및 토션스프링(1343)만 구비할 수 있다.
제2 탄성센서(134b, 134c)와 제2 락킹홈(1335)은 파티션(133)의 전후방향 움직임을 제한할 수 있으며, 전술한 바와 같이 소정 이상의 힘이 가해지면 탄성래치(1344)가 눌려 파티션(133)을 파티션홈(1323)으로부터 인출할 수 있다.
파티션홈(1323)은 파티션(133)의 좌우방향의 움직임을 지지하고, 파티션(133)의 상하에 위치하는 파티션홈(1323)이 파티션(133)의 수직방향의 위치를 고정하며 파티션(133)은 안정적으로 수납부(115)에 고정될 수 있다.
도 18은 본 발명의 일 실시예에 따른 배송로봇(100)의 파티션(133) 수납방법을 도시한 도면이다. 수납부(115)에서 인출한 파티션(133)은 별도의 장소에 보관하는 경우 분실의 위험이 있고, 필요시 찾아야 하는 불편함이 있다.
이에 본 발명은 제거한 파티션(133)을 수납할 수 있는 수단으로서 수납레일(136)을 구비할 수 있다. 도 18에 도시된 바와 같이, 수납레일(136)은 상부 수납부(115e)와 하부 수납부(115f)의 상측에 위치할 수 있으며, 상부 수납부(115e)의 파티션(133)을 제거한 후에 상부 수납부(115e)의 상부에 위치하는 수납레일(136)에 파티션(133)을 보관할 수 있다.
파티션(133)의 제1 변(1331)의 길이는 수납부(115)의 전후방향 길이에 상응하고 제3 변(1333)의 길이는 상부 수납부(115e) 또는 하부 수납부(115f)의 수직방향 길이(높이)에 상응할 수 있다. 수납부(115)의 수평방향 길이(너비)는 제1 변(1331)의 길이 또는 제3 변(1333)의 길이 중 하나의 길이에 상응하는 길이를 가지도록 구성하면, 파티션(133)을 수납부(115)의 수평방향 양 측에 위치하는 수납레일(136)에 끼울 수 있다.
본 실시예에서 수납부(115)의 너비는 제1 변(1331)의 길이에 상응하며, 파티션(133)의 제3 변(1333) 및 제4 변(1334)이 수납레일(136)에 끼워질 수 있다. 제3 변(1333)과 제4 변(1334)은 수납레일(136)에 안정적으로 고정하기 위한 구조를 포함할 수 있다.
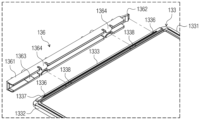
도 19 및 도 20는 본 발명의 일 실시예에 따른 배송로봇(100)의 수납레일(136)과 파티션(133)을 도시한 도면이다. 도 19는 파티션(133)과 수납레일(136)이 체결하는 위치를 매칭하여 수평방향으로 배치한 도면이고, 도 20은 수납레일(136)에 파티션(133)의 제3 변이 삽입된 상태를 도시하고 있다.
파티션(133)의 제3 변(1333)과 제4 변(1334)은 동일한 형상을 가지므로 제3 변(1333) 기준으로 설명한다. 파티션(133)의 제3 변(1333)은 수납레일(136)과 체결하기 위한 구조로서 후크홈(1336) 및 그루브(1337) 및 클립홈(1338)을 포함한다.
수납레일(136)은 파티션(133)의 제3 변(1333)이 끼워지는 오목한 레일홈(1361)을 포함하고, 레일홈(1361)에 끼워진 파티션(133)은 상하가 지지될 수 있다. 수납레일(136)의 전방에 위치하는 입구(도면상 좌측)는 넓어 파티션(133)의 삽입이 용이하도록 구성할 수 있고, 후방으로 갈수록 좁아지는 경사부(1363) 를 포함할 수 있다.
파티션(133)의 슬라이드 이동을 위해 레일홈(1361)의 좁아진 후단의 높이도 파티션(133)의 두께보다 크며, 파티션(133)이 선반레일(1325)에 끝까지 삽입시 고정하기 위한 구조가 필요하다. 수납레일(136)은 파티션(133) 방향으로 돌출된 수직클립(1364)을 포함할 수 있으며 수직클립(1364)은 파티션(133)의 제3 변(1333)에 형성된 클립홈(1338)에 끼워지면 파티션(133)이 고정될 수 있다.
파티션(133)의 슬라이드 이동 시 수직클립(1364)이 통과하는 통로를 구비하기 위해 클립홈(1338)이 형성된 위치에서 제3 변(1333)과 평행하게 형성된 그루브(1337)를 포함할 수 있다. 수직클립(1364)은 도 19에 도시된 바와 같이 파티션(133)의 상하 양측에 위치하며 수납레일(136)에 삽입된 파티션(133)의 수직방향 위치를 고정할 수 있다. 클립홈(1338)과 수직클립(1364)은 파티션(133)의 삽입방향에 상관없이 체결할 수 있도록 제3 변(1333)의 양측에 대칭으로 한 쌍 구비할 수 있다.
수납레일(136)은 후단부에 위치하는 수납후크(1362)를 포함할 수 있다. 수납후크(1362)는 수납레일(136)에 형성된 후크홈(1336)에 삽입되며 후크홈(1336)에 수납후크(1362)가 삽입되면 파티션(133)의 수평방향 움직임을 고정하면서 동시에 수납레일(136)에서 전방으로 인출되는 것을 방지할 수 있다. 수납후크(1362)는 수납레일(136)의 후단에만 위치하나, 후크홈(1336)은 파티션(133)의 삽입방향에 제한을 두지 않고자 제3 변(1333)에 대칭으로 구현할 수 있다.
수납레일(136)에 파티션(133)이 안정적으로 고정되지 않으면 배송로봇(100)의 주행 중 소음이 발생할 수 있으므로, 도 20에 도시된 바와 같이 탄성을 가지는 수직클립(1364) 및 수납후크(1362)가 클립홈(1338)과 후크홈(1336)에 삽입되며 파티션(133)을 수납레일(136)에 흔들림 없이 고정할 수 있다.
도 21은 본 발명의 일 실시예에 따른 배송로봇(100)의 파티션(133) 수납방법의 다른 실시예를 도시한 도면이다. 본 실시예의 파티션(133)은 중간선반(132)의 내측에 수납할 수 있다. 중간선반(132) 내부에 수납레일(136)이 위치하며 중간선반(132) 내부에 파티션(133)을 수납할 수 있다.
다만, 중간선반(132)의 좌우에는 선반레일(1325)이 위치하므로, 파티션(133)은 제1 변(1331)과 제2 변(1332)이 수납레일(136)에 결합되어야 한다. 제1 변(1331)과 제2 변(1332)에 수납레일(136)의 수직클립(1364)과 수납후크(1362)에 결합하는 클립홈(1338)과 후크홈(1336)이 형성될 수 있다.
본 실시예는 중간선반(132)의 두께방향 공간을 활용하므로 도 15 (b)의 중간선반(132) 타면에 형성된 컵홀더(1324)를 생략할 수 있다.
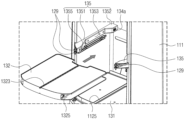
도 22는 본 발명의 일 실시예에 따른 배송로봇(100)의 슬라이딩 선반(131)이 인출된 상태를 도시한 사시도이다. 배송로봇(100)에 중간선반(132)이 삽입되어 있는 경우 하부 수납부(115f)에 위치하는 물품은 사용자가 서있는 상태에서 잘 보이지 않을 수 있다. 또한, 하부 수납부(115f)에 위치하는 물품을 수령하기 위해서 사용자는 몸을 숙여 물건을 꺼내야 하는 어려움이 있다.
이에 본 발명의 배송로봇(100)은 하부 수납부(115f)에 있는 물품을 쉽게 눈으로 확인 가능하고, 용이하게 수령할 수 있도록 도 22에 도시된 바와 같이 슬라이드 인출되는 슬라이딩 선반(131)을 구비할 수 있다.
슬라이딩 선반(131)은 도어(120)가 개방되면 자동으로 전방으로 돌출될 수 있다. 하부 수납부(115f)를 파티션(133)으로 좌우로 구획할 수 있도록 슬라이딩 선반(131)은 한 쌍을 구비할 수 있다.
한 쌍의 슬라이딩 선반(131)은 하부 수납부(115f)에 파티션(133)이 삽입된 경우 독립적으로 구동할 수 있다. 하부 수납부(115f)에 파티션(133)이 제거된 경우 한 쌍의 슬라이딩 선반(131)에 하나의 물품이 안착될 수 있어, 한 쌍의 슬라이딩 선반(131)은 동시에 구동할 수 있다.
또는 도 5와 같이 중간선반(132)이 제거되어 하나의 수납공간으로 이용하는 경우 4개의 도어(120)가 동시에 열리며 슬라이딩 선반(131)의 물건을 수령자가 손쉽게 확인할 수 있다. 이 경우 슬라이딩 선반(131)은 인출되지 않을 수 있다.
즉, 슬라이딩 선반(131)은 중간선반(132)이 삽입된 경우에만 구동하도록 제어할 수 있다. 제어부(180)는 중간선반(132)의 장착여부를 제1 탄성센서(134a)가 감지하면 제어부(180)는 도어(120)가 개방 시 슬라이딩 선반(131)을 인출할 수 있다.
도 23는 도 22 상태를 도시한 측면도이다. 슬라이딩 선반(131)이 전방으로 인출되면 슬라이딩 선반(131)에 수납된 물건의 무게로 인하여 무게중심이 이동(C1->C2)할 수 있다. 무게중심 변화는 구동휠(171)과 캐스터(172) 간의 거리(d)보다 작게 설계하는 것이 바람직하다.
예를 들어 구동휠(171)과 캐스터(172) 간의 거리가 150mm인 경우로서, 슬라이딩 선반(131)에 수납된 물품(L)이 15kg이면 슬라이딩 선반(131)이 100mm 전방으로 인출 시 무게중심의 변화는 약 50mm 정도로 예상될 수 있다.
제어부(180)는 수납된 물품의 무게에 따라 슬라이딩 선반(131)의 구동범위를 다르게 제어할 수 있다. 또는 내부에 수납된 물품의 내부 카메라(195)가 인식하여 슬라이딩 선반(131)의 내측 깊숙이 배치된 경우, 제어부(180)는 슬라이딩 선반(131)의 인출량을 더 크게 제어할 수 있다.
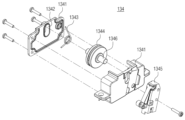
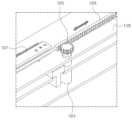
도 24는 본 발명의 일 실시예에 따른 배송로봇(100)의 슬라이딩 선반(131) 및 선반 구동부(137)를 도시한 분해 사시도이다. 본 발명의 슬라이딩 선반(131)은 하부 수납부(115f)의 바닥에 위치할 수 있다. 슬라이딩 선반(131)은 수납부(115)의 하단을 구성하는 수납부 베이스(1123)의 상측에서 전후 방향으로 슬라이딩 이동할 수 있다. 슬라이딩 선반(131) 높이에 상응하여 하부 수납부(115f)의 공간이 상부 수납부(115e)보다 작아질 수 있다.
슬라이딩 선반(131)을 전후 방향으로 구동하기 위한 선반 구동부(137)로서 본 실시예는 리니어 액추에이터(1373)를 포함할 수 있다. 리니어 액추에이터(1373)는 슬라이딩 선반(131)에 전후 방향으로 구동하는 힘을 전달한다.
리니어 액추에이터(1373)는 구동방향에 대해서는 무게를 지지할 수 있으나, 구동방향에 수직방향으로 인가되는 힘에는 취약하다. 즉 슬라이딩 선반(131)에 수납된 물품이 무거우면 선반 구동부(137)에 부하가 걸려 리니어 액추에이터(1373)가 파손될 수 있다.
슬라이딩 선반(131) 및 그 위에 수납된 물품의 무게를 지지하면서 슬라이딩 선반(131)의 구동을 가이드하기 위해 슬라이딩 레일(1371)을 포함할 수 있다. 슬라이딩 레일(1371)은 슬라이딩 선반(131)의 하부에 결합하며 슬라이딩 선반과 베이스부(1123) 사이에 위치할 수 있다. 슬라이딩 레일(1371)은 ㄷ자 형의 단면을 가지는 복수개의 빔을 이용하여 다단으로 구성할 수 있다. 슬라이딩 레일(1371)은 빔 사이에 위치하는 베어링 볼을 포함할 수 있으며, 베어링 볼은 빔 사이의 슬라이딩 운동이 부드럽게 이루어지도록 보조할 수 있다.
도 24에 도시된 바와 같이 리니어 액추에이터(1373)는 수납부 베이스(1123) 보다 하부에 위치할 수 있다. 슬라이딩 레일(1371)은 제어부(180)와 연결될 필요 없으므로 수납부 베이스(1123)의 상면에 위치하여 직접적으로 슬라이딩 선반(131)을 지지할 수 있다.
슬라이딩 레일(1371)은 슬라이딩 선반(131)의 리니어 액추에이터(1373) 보다 상측에서 슬라이딩 선반(131)을 지지하며, 슬라이딩 선반(131) 및 물품의 무게를 직접적으로 지지할 수 있다. 슬라이딩 레일(1337)을 통해 리니어 액추에이터(1373)에 수직방향으로 힘이 인가되는 것을 제한 할 수 있다.
도 25는 본 발명의 일 실시예에 따른 배송로봇(100)의 수납부 베이스(1123)에 결합된 슬라이딩 레일(1371) 및 슬라이딩 선반(131)을 도시한 도면으로 리니어 액추에이터(1373)는 수납부 베이스(1123)에 형성된 구동홀(1124)을 통해 슬라이딩 선반(131)과 연결되어 슬라이딩 선반(131)에 구동력을 제공할 수 있다.
수납부(115)에 수납된 물품 중 액상의 물품이 포함된 경우 배송로봇(100)의 주행 중에 또는 슬라이딩 선반(131)의 구동 중에 액체가 수납부(115) 내부로 흘릴 수 있다.
수납부 베이스(1123)에 형성된 구동홀(1124)을 통해 수납부 베이스(1123) 하부에 위치하는 리니어 액추에이터(1373)나, 도어의 모터(122) 및 제어부(180) 등의 전자부품에 액체가 유입되면 고장 위험이 있다. 따라서, 구동홀(1124)을 통한 물의 유입을 막는 구조가 필요하다.
슬라이딩 선반(131)에 흘린 액체가 수납부 베이스(1123)로 흘러 내리지 않도록 슬라이딩 선반(131)의 둘레에 흘림방지턱(1313)을 형성할 수 있다. 소량의 액체가 흐른 경우 흘림방지턱(1313)이 수납부 베이스(1123)로 액체가 흐르는 것을 막아준다. 본 실시예는 약 3.5mm의 높이로 형성하여 250ml의 액체가 넘치지 않도록 설계하였다.
수납부 베이스(1123)에 흐르더라도, 파티션(133)이 삽입되는 파티션홈(1323)은 수납부 베이스(1123)보다 하측으로 인입되므로 파티션홈(1323)을 따라 전방으로 흐르도록 가이드하여 구동홀(1124)을 통해 수납부 베이스(1123) 하부로 유입되는 것을 방지할 수 있다.
구동홀(1124)은 도 25에 도시된 바와 같이 수납부 베이스(1123)의 다른 부분보다 높게 위치하도록 단차(1123s)를 형성할 수 있다. 또한, 구동홀(1124) 둘레에 액상이 유입되는 것을 방지하는 턱(1124s)을 형성할 수 있다.
슬라이딩 선반(131)이 전방향으로 구동 시 슬라이딩 선반(131)에 위치하는 물품이 뒤로 넘어가 수납부 베이스(1123)로 넘어가는 것을 방지하기 위해 슬라이딩 선반(131)의 후방에 전도방지벽(1312)을 포함할 수 있다. 전도방지벽(1312)은 20mm이상 높이로 설계할 수 있다.
도 26은 본 발명의 일 실시예에 따른 배송로봇(100)의 슬라이딩 선반(131) 분리방법을 도시한 도면이다. 수납부 베이스(1123)를 청소하거나 유지 보수를 위해 슬라이딩 선반(131)을 바디(110)에서 분리할 필요가 있다.
도 26의 (a)와 같이 리니어 액추에이터(1373)와 슬라이딩 선반(131)을 체결하는 스크류(1314)를 제거하면 슬라이딩 선반(131)을 리니어 액추에이터(1373)의 구동범위 이상으로 전방으로 당길 수 있다. 스크류(1314)가 외부로 노출되지 않도록 스크류(1314)의 상면을 커버하는 캡(1316)을 더 포함할 수 있다.
도 26의 (b)에 도시된 바와 같이 전방으로 당긴 슬라이딩 선반(131)의 하부에서 슬라이딩 레일(1371)을 분해한다. 다단 슬라이딩 레일(1371) 중 슬라이딩 선반(131)에 부착된 빔(1371a)과 수납부 베이스(1123)에 부착된 빔(1371b) 사이를 체결하는 후크(1371c)를 눌러 슬라이딩 레일(1371)을 분해할 수 있으며, 슬라이딩 선반(131)을 바디(110)로부터 분리할 수 있다.
도 27은 본 발명의 일 실시예에 따른 배송로봇(100)의 슬라이딩 선반(131)의 안전제어 방법에 관한 것이다. 전술한 바와 같이 슬라이딩 선반(131)에 수납된 물품이 허용치보다 무거운 경우 선반 구동부(137)는 과부하로 인하여 고장우려가 있다.
도 27의(a)에 도시된 바와 같이, 리니어 액추에이터(1373)는 구동의 안전을 위해 최단길이와 최장길이에 도달하면 자동 단락되는 회로구성을 가질 수 있다. 따라서 종료점(end point)에 도달하면 단락 되므로 리니어 액추에이터(1373)에서 측정된 전압이 0가 된다.
한편 슬라이딩 선반(131)에 물품이 없는 경우 5V 이하의 전압이 측정되나 최대무게를 초과하면 전압이 18V이상이 측정될 수 있으며, 이 경우 제어부(180)는 리니어 액추에이터(1373)를 강제 중지시켜 과부하를 방지할 수 있다. 상기 값은 리니어 액추에이터(1373)의 종류나 설계에 따라 상기 값은 달라질 수 있으나 리니어 액추에이터(1373)의 전압을 모니터링하면서 리니어 액추에이터(1373)의 과부하여부를 감지할 수 있다.
리니어 액추에이터(1373) 이외에 다른 방식의 선반 구동부(137)를 이용할 수 있다. 도 28 및 도 29는 본 발명의 다른 실시예에 따른 배송로봇(100)의 슬라이딩 선반(131)의 구동부를 도시한 도면이다.
도 28은 랙피니언 기어를 이용하여 선반 구동부(137)를 구현하였으며, 수납부 베이스(1123) 하부에 위치하는 슬라이드 모터(1374)가 수납부 베이스(1123)의 상측에 위치하는 피니언기어(1375)를 회전시키고, 슬라이딩 선반(131)의 하부에 결합된 랙기어(1376)를 전후방향으로 직선구동시킬 수 있다. 전술한 리니어 액추에이터(1373)보다 하중에 강하고, 구동홀(1124)의 크기를 작게 형성하거나 실링이 가능하여 방수측면에서 유리한 장점이 있다.
도 29에 도시된 실시예에 따르면, 도어(120)와 연결된 선반링크(1378)를 통해 슬라이딩 선반(131)을 인출할 수 있다. 선반링크(1378)의 일단은 도어(120)에 결합되고 타단은 슬라이딩 선반(131)에 결합되며 도어(120)가 개방되면 도어링크(128, 129)가 회전하면서 슬라이딩 선반(131)을 전방으로 당길 수 있다.
선반링크(1378)를 이용한 슬라이딩 선반(131)구조는 선반구동을 위한 리니어 액추에이터(1373)이나 슬라이드 모터(1374) 없이 도어(120)와 같이 구동하는 장점이 있다. 다만, 도어(120)를 구동하는 모터(122)에 과부하 우려가 있고, 중간선반(132)의 장착여부와 관계없이 하부 도어(120)가 개방 시 인출될 수 있다.
도 30은 본 발명의 일 실시예에 따른 배송로봇(100)의 수납부(115)를 도시한 정면도이다. 수납부(115)에 물건의 유무를 감지하기 위해 배송로봇(100)은 수납부(115) 내부에 내부 카메라(195)를 더 구비할 수 있다.
도 7에서 살펴본 바와 같이 본 발명의 수납부(115)는 상황에 따라 복수 개로 구획하여 사용할 수 있어, 복수 개로 구획된 수납부(115a, 115b, 115c, 115d) 내부를 모두 관측할 수 있는 내부 카메라(195)가 필요하다.
본 발명의 배송로봇(100) 최대 4개의 수납부(115)로 구획되며 4개의 수납부(115)에 각각 내부 카메라(195)를 배치하는 경우 비용이 과다하게 증가할 수 있다. 이에 본 발명의 배송로봇(100)은 상부 수납부(115e)와 하부 수납부(115f)의 중앙에 배치된 2개의 내부 카메라(195a. 195b)를 이용한다.
중간선반(132)이 삽입된 상태에서는 상부 수납부(115e)의 제1 내부 카메라(195a)와 하부 수납부(115f)의 제2 내부 카메라(195b)가 상부 수납부(115e)와 하부 수납부(115f)를 각각 관찰한다. 중간선반(132)이 삽입되지 않은 상태에서는 하부의 내부 카메라(195b)만 이용하여 수납부(115) 내부를 관찰하여, 전력소모를 줄일 수 있다.
내부 카메라(195)는 도 30에 도시된 바와 같이 수납부(115)의 수평방향 중앙에 위치하므로 파티션(133)이 삽입되는 위치와 중첩될 수 있다. 수납부(115)에 파티션(133)이 없는 경우 하나의 내부 카메라(195a, 195b)로 상부 수납부(115e)와 하부 수납부(115f)를 관찰하여 물건의 유무를 파악하는 데 어려움이 없으나, 파티션(133)이 삽입되면 좌우를 동시에 관찰해야 한다.
도 31은 본 발명의 일 실시예에 따른 배송로봇(100)의 파티션(133)의 유무에 따라 상부 수납부(115e)에 위치하는 내부 카메라(195a)가 촬영한 화면을 도시한 도면이다.
(a)와 같이 파티션(133)이 삽입되면 제2 탄성센서(134b)가 이를 감지하고, 제어부(180)는 내부 카메라(195)가 촬영한 좌측과 우측의 영상을 구분하여 각 수납부(115a, 115b) 별로 물품의 유무를 판단할 수 있다.
제2 탄성센서(134b)가 파티션(133)이 제거된 것으로 감지한 경우 (b)와 같이 제어부(180)는 내부 카메라(195a)가 촬영한 영상을 하나의 수납부(115e)에 대한 영상으로 판단하여 물품의 유무를 판단할 수 있다.
도 32는 본 발명의 일 실시예에 따른 배송로봇(100)의 내부 카메라(195)의 화각을 도시한 개념도이다. 배송로봇(100)의 파티션(133)은 중간선반(132)대비 얇아 시야를 많이 가리지 않으나 내부 카메라(195)와 거리가 가까워 질수록 내부 카메라(195)의 시야를 가릴 수 있다.
파티션(133)이 내부 카메라(195)와 인접 배치되어 내부 카메라(195)의 시야를 대부분 가리면 내부 카메라(195)는 수납부(115)를 관찰할 수 없다. 따라서, 도 32에 도시된 바와 같이 파티션(133)을 수납부(115)에 삽입 시 파티션(133)의 내측 단부가 내부 카메라(195)와 소정거리(C) 이격되도록 배치할 수 있다.
배송로봇(100)의 파티션(133)이 수납부(115)에 삽입된 상태에서 파티션(133)의 내측단부와 이격된 위치에 내부 카메라(195)를 배치하기 위해 수납부(115)의 후면을 오목하게 인입한 카메라 배치부(1127)를 포함할 수 있다.
내부 카메라(195)와 파티션(133)의 단부의 이격거리는 내부 카메라(195)의 화각 및 파티션(133)의 두께에 따라 달라질 수 있으나, 35mm-70mm 표준카메라의 화각이 수평방향으로 34° ~63°이다.
계산의 편의를 위해 화각이 60° 인 경우 거리와 화각에 따른 촬영 가능 한 범위는 1:1이 된다. 즉, 파티션(133)의 두께 이상의 거리(c)가 이격 되어야 내부 카메라(195)의 시야를 확보할 수 있다. 배송로봇(100)의 내부 카메라(195)는 파티션(133) 두께의 3배 이상의 거리로 이격하여 배치할 수 있으며, 본 실시예는 10mm의 파티션(133)을 설치시 40mm 이격거리를 가지도록 배치할 수 있다.
특히 본 발명의 내부 카메라(195)는 도 31에 도시된 바와 같이 하측방향으로 기울어져 있어, 시야각 중심선은 파티션(133)과의 실제 거리는 40mm보다 더 길 수 있다.
내부 카메라(195)는 선반에 위치하는 물건의 유무를 판단하는 것이 목적이므로 선반의 후단부(도면상 우측)까지 모두 관찰할 수 있도록 내부 카메라(195)를 아래쪽으로 기울여 배치할 수 있다.
제1 내부 카메라(195a)의 중간선반(132)으로부터 높이에 따라 내부 카메라(195a)의 시야가 달라 기울기는 달라질 수 있으나, 내부 카메라(195)의 높이가 중간선반(132)으로부터 180mm정도의 높이에 배치한 경우를 기준으로 실험하였다. 본 실험에서 중간선반(132)의 전후방향 길이는 약 450mm이다.
제2 내부 카메라(195b)는 슬라이딩 선반(131)의 높이로 인하여 슬라이딩 선반(131)으로부터 높이(h2)가 중간선반(132)으로부터 제1 내부 카메라(195a)의 높이(h1)보다 작을 수 있다(h1>h2).
제2 내부 카메라(195b)는 슬라이딩 선반(131)이 인출시 수납부 베이스(1123)에 떨어진 물품을 감지할 수 있어야 한다. 따라서, 제2 내부 카메라(195b)가 수납부 베이스(1123)의 후단까지 감지할 수 있도록 제2 내부 카메라(195b)는 수납부 베이스(1123)로부터 높이가 h1에 위치하도록 구성할 수 있으며 슬라이딩 선반(131)으로부터 높이(h2)는 h1보다 작아질 수 있다.
도 33은 본 발명의 일 실시예에 따른 배송로봇(100)의 내부 카메라(195)를 하측으로 20° 기울인 상태에서 촬영한 경우를 도시한 도면이고, 도 34는 본 발명의 일 실시예에 따른 배송로봇(100)의 내부 카메라(195)를 하측으로 30° 기울인 상태에서 촬영한 경우를 도시한 도면이다.
도 33의 (a)와 같이 내부 카메라(195)를 하측으로 20° 기울인 상태에서 촬영한 경우 (b)와 같이 상부 수납부(115e)가 촬영된다. 도 34의 (a)와 같이 내부 카메라(195)를 하측으로 30° 기울인 상태에서 촬영한 경우 (b)와 같이 상부 수납부(115e)가 촬영된다.
하측으로 기울어진 각도가 클수록 중간선반(132)의 후단까지 더 관찰할 수 있으며(a1<a2), 수납부(115)의 측면부분의 촬영 가능한 범위(b)도 20°보다 30°에서 더 넓어질 수 있다(b1<b2).
도 33과 같이 내부 카메라(195)를 20° 기울인 상태에서, 촬영 범위(a1)가 중간선반(132)의 길이보다 짧아, 중간선반(132)의 후단은 화각에 포합되지 않아 관찰이 어렵다. 도 34와 같이 내부 카메라(195)를 20° 기울인 상태에서, 중간선반(132)의 촬영 범위(a2)가 넓어지므로, 본 실시예에서 내부 카메라(195)의 최적의 화각을 30°로 설정하였다. 내부 카메라(195)의 화각은 수납부의 크기에 따라 달라질 수 있으며, 25° 이상 35°이내의 범위로 설정할 수 있다.
내부 카메라(195)가 실장되는 카메라 실장부(1127)가 수납부(115)의 후방 내측면에서 경사면(1127)을 이루며 인입될 수 있다. 이때, 경사면(1127)은 내부 카메라(195)의 시야를 방해하지 않도록 카메라의 화각 이상의 기울기를 가지며, 본 발명의 내부 카메라(195)는 하측으로 기울어져 있으므로, 경사면(1127)은 하측이 상측보다 가파르게 형성될 수 있다.
도 34에 도시된 바와 같이 내부 카메라(195)는 도어(120)가 개방된 경우 도어(120) 외측을 관찰할 수 있다. 배송로봇(100)의 외부에 위치하는 카메라(193)는 주행방향인 도어(120)의 반대측에만 위치하여, 도어(120) 방향에 사람이나 장애물이 위치하는지 여부를 판단할 수 없다.
내부 카메라(195)는 도어(120)가 열린 상태에서 슬라이딩 선반(131)을 인출해야 하는 경우 도어(120) 밖에 사람이나 장애물이 위치하는지 여부를 감지할 수 있다. 제어부는 내부 카메라(195)의 영상을 기초로 도어(120) 밖에 장애물이 없는 것을 확인 후 슬라이딩 선반(131)을 인출할 수 있다.
이하에서는 본 발명의 배송로봇(100)을 제어하여 물품을 배송하는 시나리오에 대해 도 35 내지 도 37을 참고하여 살펴보도록 한다.
도 35는 호텔에서 고객이 호텔리어에게 물품을 요청한 경우 이를 배송로봇(100)을 이용하여 고객에게 전달하는 과정을 도시하고 있다. 먼저 고객이 수건 등의 비품을 추가로 요청하면(S111), 호텔리어는 이를 배송로봇(100)의 수납부(115)에 적재한다.
관리자인 호텔리어는 전체 수납부(115)를 모두 볼 수 있도록 4개의 도어(120)를 모두 열 수 있으며, 필요한 수납부(115)의 개수에 상응하여 중간선반(132) 및 파티션(133)을 수납부(115)에 삽입할 수 있다.
제1 탄성센서(134a) 및 제2 탄성센서(134b)가 수납부(115)의 분할을 감지하고, 호텔리어가 물품을 분할된 수납부(115) 중 하나에 적재하면 이를 내부 카메라(195)가 감지하여 물품이 수납된 수납부(115)와 고객의 요청을 매칭할 수 있다.
본 실시예에서 호텔리어는 3번 수납부(115)에 물품을 적재하고(S112), 3번 수납부(115)의 암호를 입력할 수 있다(S113). 배송로봇(100)은 도어(120)를 닫고 지정된 장소, 고객의 방으로 배송을 시작한다(S114).
호텔리어는 고객에게 설정한 암호를 안내하여, 고객은 로봇이 도착하면 미리 안내받은 암호를 입력한다(S121). 배송로봇(100)은 암호가 일치하면 3번 수납부(115)의 도어(120)를 개방한다(S122). 배송로봇(100)의 내부 카메라(195)는 3번 수납부(115) 앞에 고객이 위치하는 지 판단하고 고객이 인접하여 위치하면 뒤로 물러날 것을 안내할 수 있다(S124).
배송로봇(100)은 고객이 하부에 위치하는 3번 수납부(115)의 물건을 용이하게 물건을 수령할 수 있도록 슬라이딩 선반(131)을 인출할 수 있다(S125). 고객이 물건을 수령하면(S126), 내부 카메라(195)는 물품의 수령을 확인한다(S131). 제어부(180)는 물건이 슬라이딩 선반(131)에서 없는 것을 확인하면(S132), 슬라이딩 선반(131)을 인입하고 도어(120)를 닫는다(S133). 로봇은 다시 지정된 장소로 이동할 수 있다(S134).
도 36 및 도 37은 도 35의 시나리오를 배송로봇(100)의 제어부(180)의 제어로직을 도시한 순서도이다. 도 36은 물품을 상차 시 제어방법이고, 도 37은 물품의 하차 시 제어방법을 도시하고 있다.
도 36을 살펴보면 물품을 배송로봇(100)에 적재하기 위해 상차명령(S211)을 입력할 수 있다. 물품이 적재되지 않은 상태에서 호텔리어가 도어(120) 오픈 버튼을 누르면 상차명령으로 인식할 수 있다.
배송로봇(100)은 상차명령에 따라 도어(120)를 열고(S213), 제1 탄성센서(134a)와 제2 탄성센서(134b)에서 감지된 신호를 기초로 중간선반(132) 또는 파티션(133)을 삽입여부를 판단할 수 있다. 중간선반(132)이 삽입되어 있는 경우, 지정된 수납부(115)가 하부 수납부(115f)이면(S214, S215), 슬라이딩 선반(131)을 인출한다(S216). 호텔리어가 물품을 슬라이딩 선반(131)에 놓고 도어(120)닫힘 명령을 입력하면(S221a), 슬라이딩 선반(131)을 수납하고 도어(120)를 닫는다(S222, S223).
중앙선반이 삽입되어 있지 않아, 하나의 수납부(115)만 포함하거나, 상부 수납부(115e)인 경우 슬라이딩 선반(131) 인출이 불필요하므로 호텔리어가 물품을 슬라이딩 선반(131)에 놓고 도어(120)닫힘 명령을 입력하면(S221b), 도어(120)를 닫는다(S223).
도어(120)가 닫히면 도어락을 걸어 도어(120)가 열리지 않도록 잠근 후(S224), 배송로봇(100)은 배송지로 이동할 수 있다(S225).
도 37은 배송지에 도착한 후 배송로봇(100)의 제어방법을 나타낸 순서도이다. 물품 수령자인 고객인 하차명령을 입력한다(S311). 하차명령은 기 설정된 비밀번호, 고객주문번호일 수 있다. 하차명령이 입력되면 도어락을 해제하고 도어(120)를 열 수 있다(S312, S313).
중간선반(132)이 삽입되어 있고, 지정된 수납부(115)가 하부 수납부(115f)이면(S314, S315), 슬라이딩 선반(131)을 인출한다(S316). 내부 카메라(195)가 물품 수령여부를 감지하여(S321a), 물품을 고객이 수령하여 슬라이딩 선반(131)에 물품이 없으면, 하차완료로 판단하고(S322a), 슬라이딩 선반(131)을 수납하고 도어(120)를 닫을 수 있다(S323, S324).
중앙선반이 삽입되어 있지 않아, 하나의 수납부(115)만 포함하거나, 상부 수납부(115e)인 경우 슬라이딩 선반(131) 인출이 불필요하므로 내부 카메라(195)가 물품 수령여부를 감지하여(S321b), 물품을 고객이 수령하여 슬라이딩 선반(131)에 물품이 없으면 하차완료로 판단하고(S322b), 도어(120)를 닫을 수 있다(S324).
배송로봇(100)은 도어락을 잠금하고, 기 지정된 장소로 복귀할 수 있다(S325, S326).
이상에서 살펴본 바와 같이, 본 발명의 배송로봇(100)은 수납부를 개폐할 수 있는 도어(120)를 구비하며 이동 시 잠금장치(127)를 통해 도어(120)가 열리는 것을 방지하여 물품을 안전하게 배송할 수 있다.
또한, 본 발명의 배송로봇(100)은 도어(120)가 열릴 때 회동 범위를 바디(110)의 외측면을 따라 이동하여 제한된 공간에서 안전하게 도어(120)를 개폐할 수 있다.
또한, 본 발명의 배송로봇(100)의 도어(120)를 구동하는 링크는 외측으로 노출되는 것을 최소화 하여 미관상 우수하고 다른 부재와 간섭이 발생하지 않는다.
또한, 본 발명의 배송로봇(100)의 도어(120)에 손끼임이 발생하더라도 부상이 발생하지 않으며 모터(122)가 역기전력으로 인한 과전압이 걸리지 않아 안전하다.
또한, 본 발명의 배송로봇(100)은 수납부(115) 내부를 필요에 따라 분할할 수 있고, 선택적으로 개폐할 수 있는 복수개의 도어(120)를 통해 내부공간의 활용도를 높일 수 있다.
또한, 본 발명의 배송로봇(100)은 선반 및 파티션(133)의 탈착여부를 감지하여 도어(120)의 수납부의 분할 상태에 따라 복수개의 도어(120)를 선택적으로 구동할 수 있다.
또한, 본 발명의 배송로봇(100)은 파티션(133)을 사용하지 않는 경우 배송로봇(100)의 수납부 내부에 수납할 수 있다.
또한, 본 발명의 배송로봇(100)은 슬라이딩 선반(131)을 구비하여 내부에 수납된 물품을 넣고 꺼내는 데 편의성을 향상시킬 수 있다.
또한, 본 발명의 배송로봇(100)은 슬라이딩 선반(131)의 하부에 위치하는 전자부품으로 액체가 유입을 방지하여 배송로봇(100)의 고장율을 낮출 수 있다.
또한, 본 발명의 배송로봇(100)의 슬라이딩 선반(131)은 손쉽게 탈착할 수 있어 유지보수가 용이한 장점이 있다.
또한, 본 발명의 배송로봇(100)은 내부 카메라(195)를 구비하여 내부에 물품의 수납여부를 판단하여 도어(120)를 개폐할 수 있다.
또한, 본 발명의 배송로봇(100)은 배송로봇(100) 외부의 사람 유무를 감지할 수 있어 슬라이딩 선반(131)의 인출시 안전여부를 미리 확인할 수 있다.
상기의 상세한 설명은 모든 면에서 제한적으로 해석되어서는 아니되고 예시적인 것으로 고려되어야 한다. 본 발명의 범위는 첨부된 청구항의 합리적 해석에 의해 결정되어야 하고, 본 발명의 등가적 범위 내에서의 모든 변경은 본 발명의 범위에 포함된다.
100: 배송로봇
110: 바디
111: 바디 하우징
112: 수납부 하우징
1123: 수납부 베이스
1125: 제2 파티션홈
115: 수납부
115e: 상부 수납부
115f: 하부 수납부
120: 도어
121: 도어패널
122: 모터
1231, 1232: 풀리
124: 평벨트
125: 구동 플레이트
127: 잠금레버
128: 제1 도어링크
129: 제2 도어링크
T1: 제1 궤적
T2: 제2 궤적
L1: 제1 간격
L2: 제2 간격
D1: 제1 거리
D2: 제2 거리
131: 슬라이딩 선반
1312: 전도방지벽
1313: 흘림방지턱
1314: 스크류
1316: 마개
132: 중간선반
1323: 파티션홈
1324: 컵홀더
1325: 선반레일
1326: 제1 락킹홈
1327: 선반후크
133: 파티션
1331: 제1 변
1332: 제2 변
1333: 제3 변
1334: 제4 변
1335: 제2 락킹홈
1336: 후크홈
1337: 그루브
1338: 클립홈
134: 탄성센서
1341: 센서 하우징
1342: 가이드 슬롯
1343: 토션 스프링
1344: 탄성래치
1345: 스위치
1346: 가이드 돌기
134a: 제1 탄성센서
134b: 제2 탄성센서
135: 선반 지지부
1351: 링크커버
1352: 센서커버
1355: 고정후크
136: 수납레일
1361: 레일홈
1362: 수납후크
1363: 경사부
1364: 수직클립
137: 선반구동부
1371: 슬라이딩 레일
1373: 리니어 액추에이터
1374: 모터
170: 주행부
160: 센싱부
161: 근접센서
162: 라이다
163: 카메라
164: 도어감지센서
1641: 닫힘센서
1642: 열림센서
150: 출력부
151: 디스플레이
152: 스피커
180: 제어부
185: 통신부
189: 전원공급부
190: 입력부
192: 사용자입력부
191: 마이크
193: 카메라
195: 내부카메라
110: 바디
111: 바디 하우징
112: 수납부 하우징
1123: 수납부 베이스
1125: 제2 파티션홈
115: 수납부
115e: 상부 수납부
115f: 하부 수납부
120: 도어
121: 도어패널
122: 모터
1231, 1232: 풀리
124: 평벨트
125: 구동 플레이트
127: 잠금레버
128: 제1 도어링크
129: 제2 도어링크
T1: 제1 궤적
T2: 제2 궤적
L1: 제1 간격
L2: 제2 간격
D1: 제1 거리
D2: 제2 거리
131: 슬라이딩 선반
1312: 전도방지벽
1313: 흘림방지턱
1314: 스크류
1316: 마개
132: 중간선반
1323: 파티션홈
1324: 컵홀더
1325: 선반레일
1326: 제1 락킹홈
1327: 선반후크
133: 파티션
1331: 제1 변
1332: 제2 변
1333: 제3 변
1334: 제4 변
1335: 제2 락킹홈
1336: 후크홈
1337: 그루브
1338: 클립홈
134: 탄성센서
1341: 센서 하우징
1342: 가이드 슬롯
1343: 토션 스프링
1344: 탄성래치
1345: 스위치
1346: 가이드 돌기
134a: 제1 탄성센서
134b: 제2 탄성센서
135: 선반 지지부
1351: 링크커버
1352: 센서커버
1355: 고정후크
136: 수납레일
1361: 레일홈
1362: 수납후크
1363: 경사부
1364: 수직클립
137: 선반구동부
1371: 슬라이딩 레일
1373: 리니어 액추에이터
1374: 모터
170: 주행부
160: 센싱부
161: 근접센서
162: 라이다
163: 카메라
164: 도어감지센서
1641: 닫힘센서
1642: 열림센서
150: 출력부
151: 디스플레이
152: 스피커
180: 제어부
185: 통신부
189: 전원공급부
190: 입력부
192: 사용자입력부
191: 마이크
193: 카메라
195: 내부카메라
Claims (14)
- 내부에 수납부(storage) 및 전방에 바디 개구부를 포함하는 바디 하우징; 및
상기 바디 개구부를 커버하는 닫힌 상태 또는 상기 바디 개구부를 개방하는 열린 상태로 구동하는 도어를 포함하고,
상기 도어는,
상기 닫힌 상태에서 상기 바디 하우징의 전방에서 상기 바디 개구부를 커버하고, 열린 상태에서며 상기 바디 하우징의 측방향으로 슬라이드 이동하는 도어패널;
제1 단부는 상기 도어패널에 회전 가능하게 결합하고 제2 단부는 상기 바디 하우징에 회전 가능하게 결합된 제1 도어링크; 및
상기 제1 도어링크에 회전력을 제공하는 모터를 포함하며,
상기 도어패널은 상기 열린 상태와 상기 닫힌 상태에서 각도가 상이한 것을 특징으로 하는 배송로봇.
- 제1항에 있어서,
상기 도어패널은
닫힌 상태에서 상기 바디 개구부의 일측에 위치하고 열린 상태에서 상기 바디 개구부의 타측으로 이동하는 제1 엣지를 포함하며,
상기 제1 도어링크는 제1 단부는 상기 제1 엣지에 결합된 것을 특징으로 하는 배송로봇.
- 제2항에 있어서,
상기 제1 도어링크는 제1 단부는
상기 도어패널의 상기 제1 엣지 방향으로 꺾어진 것을 특징으로 하는 배송로봇.
- 제1항에 있어서,
상기 도어패널에 결합한 제1 단부와 상기 바디 하우징에 결합된 제2 단부를 포함하는 제2 도어링크를 포함하고,
상기 제1 도어링크의 제1 단부와 제2 단부 사이의 제1 간격은 상기 제2 도어링크의 제1 단부와 제2 단부 사이의 제2 간격보다 더 긴 것을 특징으로 하는 배송로봇.
- 제4항에 있어서,
상기 제2 도어링크는
상기 제1 단부와 제2 단부가 같은 방향을 향하도록 U자 형상으로 꺾인 절곡부를 포함하는 것을 특징으로 하는 배송로봇.
- 제5항에 있어서,
상기 제2 도어링크는
상기 절곡부의 일측에서 연장되며 상기 도어에 결합된 상기 제1 단부를 포함하는 제1 부분; 및
상기 절곡부의 타측에서 연장되며 상기 바디에 결합되는 상기 제2 단부를 포함하는 제2 부분을 포함하고,
상기 제2 부분의 길이는 상기 제1 부분의 길이보다 긴 것을 특징으로 하는 배송로봇.
- 제4항에 있어서,
상기 도어패널은
상기 바디 하우징의 일면에 위치하는 전면 도어부와 상기 일면에서 측방향으로 곡선을 이루며 휘어진 측면 도어부를 포함하고,
상기 제2 도어링크의 제1 단부는 상기 전면 도어부와 상기 측면 도어부 사이에 결합된 것을 특징으로 하는 배송로봇.
- 제4항에 있어서,
상기 제2 도어링크의 상기 제2 단부는 상기 바디 개구부의 단부에 인접하여 상기 바디 하우징에 회전 가능하게 결합된 것을 특징으로 하는 배송로봇.
- 제4항에 있어서,
상기 제2 도어링크는 상기 도어패널의 상측과 하측에 각각 구비되어 한 쌍을 포함하는 것을 특징으로 하는 배송로봇.
- 제9항에 있어서,
상기 수납부를 상부 수납부와 하부 수납부로 구획하며 상기 바디 하우징에 탈착 가능한 중간선반을 포함하고,
상기 도어는
상기 중간선반을 기준으로 상부 수납부를 개폐하는 상부도어; 및
상기 중간선반의 하부 수납부를 개폐하는 하부도어를 포함하며,
상기 도어패널에 결합된 한 쌍의 제2 도어링크 중 하나는
상기 중간선반의 측방향에 위치하는 것을 특징으로 하는 배송로봇.
- 제1항에 있어서,
상기 모터와 연결된 제1 풀리;
상기 제1 도어링크와 연결된 제2 풀리; 및
상기 제1 풀리와 상기 제2 풀리를 감싸는 폐곡선을 이루는 평벨트를 포함하는 것을 특징으로 하는 배송로봇.
- 제11항에 있어서,
상기 도어는,
상기 제2 풀리의 외주면의 일측에서 돌출된 센싱돌기를 포함하고,
상기 도어패널이 닫힌 상태에서 상기 센싱돌기와 접촉하는 닫힘감지센서; 및
상기 도어패널이 열린 상태에서 상기 센싱돌기와 접촉하는 열림감지센서를 포함하는 것을 특징으로 하는 배송로봇.
- 제1항에 있어서,
상기 제1 도어링크는 제1 회전방향으로 회전하며 상기 도어패널을 상기 닫힌 상태에서 상기 열린 상태로 전환하며,
상기 도어는,
상기 닫힌 상태에서 상기 제1 도어링크의 상기 제1 회전방향에 위치하는 잠금레버; 및
상기 열린 상태로 전환 시 상기 잠금레버를 상기 제1 도어링크의 회전범위에서 제거하는 잠금모터를 포함하며,
상기 잠금레버는 수동으로 가압시 상기 제1 도어링크의 회전범위에서 제거 가능한 것을 특징으로 하는 배송로봇.
- 제1항에 있어서,
상기 도어는 상하 좌우 방향으로 2x2로 배치된 4개의 도어를 포함하며,
좌측에 위치하는 도어와 우측에 위치하는 도어는 서로 대칭방향으로 구동하고,
상기 바디 하우징 내부의 수납부의 구획형태에 따라 상기 4개의 도어를 선택적으로 구동하는 제어부를 포함하는 것을 특징으로 하는 배송로봇.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020230123438A KR20250040407A (ko) | 2023-09-15 | 2023-09-15 | 배송로봇 |
| US18/650,931 US20250092729A1 (en) | 2023-09-15 | 2024-04-30 | Delivery robot |
| EP24189326.2A EP4523859A1 (en) | 2023-09-15 | 2024-07-18 | Delivery robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020230123438A KR20250040407A (ko) | 2023-09-15 | 2023-09-15 | 배송로봇 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20250040407A true KR20250040407A (ko) | 2025-03-24 |
Family
ID=91959222
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020230123438A Pending KR20250040407A (ko) | 2023-09-15 | 2023-09-15 | 배송로봇 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20250092729A1 (ko) |
| EP (1) | EP4523859A1 (ko) |
| KR (1) | KR20250040407A (ko) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP1787090S (ja) * | 2023-12-15 | 2024-12-17 | 配送ロボット |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA3126446C (en) * | 2019-01-11 | 2022-05-31 | St Engineering Aethon, Inc. | Autonomous mobile delivery robot and chain of custody system |
| WO2020209426A1 (ko) * | 2019-04-11 | 2020-10-15 | 엘지전자 주식회사 | 적재 모듈 및 이를 구비한 운반 로봇 |
| CN213165406U (zh) * | 2020-08-14 | 2021-05-11 | 上海擎朗智能科技有限公司 | 一种服务机器人 |
| CN219258110U (zh) * | 2022-07-18 | 2023-06-27 | 深圳十一空间机器人有限公司 | 一种用于配送机器人具有可自动开关门的储物箱体 |
| CN219008998U (zh) * | 2023-01-13 | 2023-05-12 | 中铭谷智能机器人(广东)有限公司 | 一种配送机器人 |
-
2023
- 2023-09-15 KR KR1020230123438A patent/KR20250040407A/ko active Pending
-
2024
- 2024-04-30 US US18/650,931 patent/US20250092729A1/en active Pending
- 2024-07-18 EP EP24189326.2A patent/EP4523859A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| EP4523859A1 (en) | 2025-03-19 |
| US20250092729A1 (en) | 2025-03-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20210323581A1 (en) | Mobile artificial intelligence robot and method of controlling the same | |
| EP4549108A1 (en) | Serving robot | |
| KR20240165200A (ko) | 운송 로봇 | |
| KR20250040407A (ko) | 배송로봇 | |
| KR20250040408A (ko) | 배송로봇 | |
| KR20250040409A (ko) | 배송로봇 | |
| KR20250040410A (ko) | 배송로봇 | |
| EP4574350A1 (en) | Traveling robot | |
| US11981025B2 (en) | Mobile robot | |
| EP4566768A1 (en) | Transport robot | |
| KR20230095420A (ko) | 이동 로봇 | |
| EP4563301A1 (en) | Serving robot | |
| US20250334972A1 (en) | Transport robot, transport means, and control method therefor | |
| KR20210056172A (ko) | 로봇 | |
| EP4523858A1 (en) | Transport robot | |
| US20260054788A1 (en) | Driving robot | |
| EP4563292A1 (en) | Driving robot | |
| US20250051113A1 (en) | Transport robot | |
| KR20250174038A (ko) | 운송 로봇 | |
| US20250187172A1 (en) | Robot | |
| WO2026042920A1 (ko) | 서빙로봇 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| R11 | Change to the name of applicant or owner or transfer of ownership requested |
Free format text: ST27 STATUS EVENT CODE: A-3-3-R10-R11-ASN-PN2301 (AS PROVIDED BY THE NATIONAL OFFICE) |