KR20240007667A - 작물열 검출 시스템, 작물열 검출 시스템을 구비하는 농업 기계, 및 작물열 검출 방법 - Google Patents
작물열 검출 시스템, 작물열 검출 시스템을 구비하는 농업 기계, 및 작물열 검출 방법 Download PDFInfo
- Publication number
- KR20240007667A KR20240007667A KR1020237042729A KR20237042729A KR20240007667A KR 20240007667 A KR20240007667 A KR 20240007667A KR 1020237042729 A KR1020237042729 A KR 1020237042729A KR 20237042729 A KR20237042729 A KR 20237042729A KR 20240007667 A KR20240007667 A KR 20240007667A
- Authority
- KR
- South Korea
- Prior art keywords
- crop
- image
- agricultural machine
- crop row
- detection system
- Prior art date
Links
- 238000001514 detection method Methods 0.000 title claims abstract description 65
- 206010037660 Pyrexia Diseases 0.000 title claims description 21
- 238000012545 processing Methods 0.000 claims abstract description 67
- 238000003384 imaging method Methods 0.000 claims abstract description 57
- 238000000034 method Methods 0.000 claims description 23
- 238000006243 chemical reaction Methods 0.000 claims description 12
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 claims description 5
- 240000004050 Pentaglottis sempervirens Species 0.000 claims description 4
- 238000010586 diagram Methods 0.000 description 32
- 238000004891 communication Methods 0.000 description 19
- 230000009466 transformation Effects 0.000 description 19
- 230000006870 function Effects 0.000 description 17
- 230000008859 change Effects 0.000 description 14
- 238000003860 storage Methods 0.000 description 12
- 239000011159 matrix material Substances 0.000 description 9
- 238000004590 computer program Methods 0.000 description 8
- 230000003287 optical effect Effects 0.000 description 8
- 241000196324 Embryophyta Species 0.000 description 7
- 238000005452 bending Methods 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 6
- 238000012937 correction Methods 0.000 description 6
- 238000005516 engineering process Methods 0.000 description 6
- 239000002689 soil Substances 0.000 description 6
- 230000033001 locomotion Effects 0.000 description 5
- 238000005259 measurement Methods 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 238000004422 calculation algorithm Methods 0.000 description 4
- 239000004065 semiconductor Substances 0.000 description 4
- 241000607479 Yersinia pestis Species 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 3
- 239000013589 supplement Substances 0.000 description 3
- 235000013311 vegetables Nutrition 0.000 description 3
- 238000004458 analytical method Methods 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 229930002875 chlorophyll Natural products 0.000 description 2
- 235000019804 chlorophyll Nutrition 0.000 description 2
- ATNHDLDRLWWWCB-AENOIHSZSA-M chlorophyll a Chemical compound C1([C@@H](C(=O)OC)C(=O)C2=C3C)=C2N2C3=CC(C(CC)=C3C)=[N+]4C3=CC3=C(C=C)C(C)=C5N3[Mg-2]42[N+]2=C1[C@@H](CCC(=O)OC\C=C(/C)CCC[C@H](C)CCC[C@H](C)CCCC(C)C)[C@H](C)C2=C5 ATNHDLDRLWWWCB-AENOIHSZSA-M 0.000 description 2
- 238000002485 combustion reaction Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 238000003306 harvesting Methods 0.000 description 2
- 239000007943 implant Substances 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 230000000873 masking effect Effects 0.000 description 2
- 238000004806 packaging method and process Methods 0.000 description 2
- 238000007781 pre-processing Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000001228 spectrum Methods 0.000 description 2
- 238000009333 weeding Methods 0.000 description 2
- 240000007124 Brassica oleracea Species 0.000 description 1
- 235000003899 Brassica oleracea var acephala Nutrition 0.000 description 1
- 235000011299 Brassica oleracea var botrytis Nutrition 0.000 description 1
- 235000011301 Brassica oleracea var capitata Nutrition 0.000 description 1
- 235000017647 Brassica oleracea var italica Nutrition 0.000 description 1
- 235000001169 Brassica oleracea var oleracea Nutrition 0.000 description 1
- 240000003259 Brassica oleracea var. botrytis Species 0.000 description 1
- 235000010149 Brassica rapa subsp chinensis Nutrition 0.000 description 1
- 235000000536 Brassica rapa subsp pekinensis Nutrition 0.000 description 1
- 241000499436 Brassica rapa subsp. pekinensis Species 0.000 description 1
- 244000000626 Daucus carota Species 0.000 description 1
- 235000002767 Daucus carota Nutrition 0.000 description 1
- 240000008415 Lactuca sativa Species 0.000 description 1
- 235000003228 Lactuca sativa Nutrition 0.000 description 1
- 244000088415 Raphanus sativus Species 0.000 description 1
- 235000006140 Raphanus sativus var sativus Nutrition 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 201000010099 disease Diseases 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000009313 farming Methods 0.000 description 1
- 230000004720 fertilization Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000031700 light absorption Effects 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000029553 photosynthesis Effects 0.000 description 1
- 238000010672 photosynthesis Methods 0.000 description 1
- 239000000047 product Substances 0.000 description 1
- 238000012827 research and development Methods 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000009331 sowing Methods 0.000 description 1
- 238000003971 tillage Methods 0.000 description 1
Images



















Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B69/00—Steering of agricultural machines or implements; Guiding agricultural machines or implements on a desired track
- A01B69/001—Steering by means of optical assistance, e.g. television cameras
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B69/00—Steering of agricultural machines or implements; Guiding agricultural machines or implements on a desired track
- A01B69/007—Steering or guiding of agricultural vehicles, e.g. steering of the tractor to keep the plough in the furrow
- A01B69/008—Steering or guiding of agricultural vehicles, e.g. steering of the tractor to keep the plough in the furrow automatic
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Soil Sciences (AREA)
- Environmental Sciences (AREA)
- Guiding Agricultural Machines (AREA)
- Image Processing (AREA)
Abstract
작물열 검출 시스템은, 농업 기계에 설치되고, 농업 기계가 주행하는 지면을 촬영하여 지면의 적어도 일부를 포함하는 시계열 컬러 화상을 취득하는 촬상 장치와, 시계열 컬러 화상의 화상 처리를 행하는 처리 장치를 구비한다. 처리 장치는, 시계열 컬러 화상으로부터, 검출 대상인 작물열의 색을 강조한 강조 화상을 생성하고, 강조 화상으로부터, 작물열의 색의 지표값이 역치 이상의 제1 화소와, 지표값이 역치 미만의 제2 화소로 분류된, 지면의 상방에서 본 상면시 화상을 생성하고, 제1 화소의 지표값에 기초하여, 작물열의 에지 라인의 위치를 결정한다.
Description
본 개시는, 작물열 검출 시스템, 작물열 검출 시스템을 구비하는 농업 기계, 및 작물열 검출 방법에 관한 것이다.
포장에서 사용되는 트랙터 등의 작업 차량의 자동화를 향한 연구 개발이 진행되고 있다. 예를 들어, 정밀한 측위가 가능한 GNSS(Global Navigation Satellite System) 등의 측위 시스템을 이용하여 자동 조타로 주행하는 작업 차량이 실용화되고 있다. 자동 조타 외에도 속도 제어를 자동으로 행하는 작업 차량도 실용화되고 있다.
또한, 포장에 있어서의 작물의 열(작물열) 또는 이랑을 카메라 등의 촬상 장치를 사용하여 검출하고, 검출된 작물열 또는 이랑을 따라서 작업 차량의 주행을 제어하는 비전ㆍ가이던스 시스템이 개발되고 있다.
특허문헌 1은, 열 형상으로 형성된 이랑에 작물이 심어진 경작지를 이랑을 따라서 주행하는 작업기를 개시하고 있다. 특허문헌 1은 차량 탑재 카메라로 경작지를 비스듬히 상방으로부터 촬영하여 취득한 원 화상을 2치화 처리한 후, 평면 사영 변환 화상을 생성하는 것을 기재하고 있다. 특허문헌 1이 개시하는 기술에서는, 평면 사영 변환 화상을 회전시킴으로써, 방향이 다른 다수의 회전 화상을 생성하고, 이랑과 이랑 사이의 작업 통로를 검출한다.
촬상 장치를 사용하여 작물열 또는 이랑을 검출하는 기술에서는, 일조 조건 등의 외란 요인에 의해 검출의 정밀도가 저하되는 경우가 있다.
본 개시는, 이와 같은 과제를 해결하는 것이 가능한 작물열 검출 시스템, 작물열 검출 시스템을 구비하는 농업 기계, 및 작물열 검출 방법을 제공한다.
본 개시에 의한 작물열 검출 시스템은, 예시적이고 비한정적인 실시 형태에 있어서, 농업 기계에 설치되고, 상기 농업 기계가 주행하는 지면을 촬영하여 상기 지면의 적어도 일부를 포함하는 시계열 컬러 화상을 취득하는 촬상 장치와, 상기 시계열 컬러 화상의 화상 처리를 행하는 처리 장치를 구비한다. 상기 처리 장치는, 상기 시계열 컬러 화상으로부터, 검출 대상인 작물열의 색을 강조한 강조 화상을 생성하고, 상기 강조 화상으로부터, 상기 작물열의 색의 지표값이 역치 이상의 제1 화소와, 상기 지표값이 상기 역치 미만의 제2 화소로 분류된, 상기 지면의 상방에서 본 상면시 화상을 생성하고, 상기 제1 화소의 상기 지표값에 기초하여, 상기 작물열의 에지 라인의 위치를 결정한다.
본 개시에 의한 농업 기계는, 예시적이고 비한정적인 실시 형태에 있어서, 상기의 작물열 검출 시스템을 구비하는 농업 기계이며, 조타륜을 포함하는 주행 장치와, 상기 작물열 검출 시스템이 결정한 상기 작물열의 상기 에지 라인의 위치에 기초하여, 상기 조타륜의 조타각을 제어하는 자동 조타 장치를 구비한다.
본 개시에 의한 작물열 검출 방법은, 예시적이고 비한정적인 실시 형태에 있어서, 컴퓨터에 실장되는 작물열 검출 방법이며, 농업 기계에 설치된 촬상 장치로부터, 상기 농업 기계가 주행하는 지면을 촬영한, 상기 지면의 적어도 일부를 포함하는 시계열 컬러 화상을 취득하는 것, 상기 시계열 컬러 화상으로부터, 검출 대상인 작물열의 색을 강조한 강조 화상을 생성하는 것, 상기 강조 화상으로부터, 상기 작물열의 색의 지표값이 역치 이상의 제1 화소와, 상기 지표값이 상기 역치 미만의 제2 화소로 분류된, 상기 지면의 상방에서 본 상면시 화상을 생성하는 것, 상기 제1 화소의 상기 지표값에 기초하여, 상기 작물열의 에지 라인의 위치를 결정하는 것을 컴퓨터에 실행시킨다.
본 개시의 포괄적 또는 구체적인 양태는, 장치, 시스템, 방법, 집적 회로, 컴퓨터 프로그램, 혹은 컴퓨터가 판독 가능한 비일시적 기억 매체 또는 이들 임의의 조합에 의해 실현될 수 있다. 컴퓨터가 판독 가능한 기억 매체는 휘발성의 기억 매체를 포함하고 있어도 되고, 불휘발성의 기억 매체를 포함하고 있어도 된다. 장치는, 복수의 장치로 구성되어 있어도 된다. 장치가 2개 이상의 장치로 구성되는 경우, 당해 2개 이상의 장치는 하나의 기기 내에 배치되어도 되고, 분리된 2개 이상의 기기 내에 나뉘어서 배치되어 있어도 된다.
본 개시의 실시 형태에 따르면, 일조 조건 등의 외란 요인에 의한 검출 정밀도 저하를 억제하여, 로버스트성을 높이는 것이 가능해진다.
도 1은 농업 기계에 설치된 촬상 장치가 지면을 촬영하는 모습을 모식적으로 도시하는 도면이다.
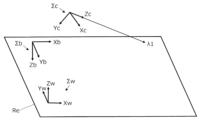
도 2는 농업 기계에 대하여 고정된 보디 좌표계 Σb 및 카메라 좌표계 Σc와, 지면에 대하여 고정된 월드 좌표계 Σw의 관계를 모식적으로 도시하는 사시도이다.
도 3은 지면에 복수의 작물열이 마련된 포장의 일부를 모식적으로 도시하는 상면도이다.
도 4는 도 3에 도시하는 농업 기계의 촬상 장치가 취득한 화상의 예를 모식적으로 도시하는 도면이다.
도 5는 농업 기계의 위치 및 방향(요 방향의 각도)을 조정한 상태를 모식적으로 도시하는 상면도이다.
도 6은 도 5의 상태에 있는 농업 기계의 촬상 장치가 취득한 화상의 예를 도시하는 도면이다.
도 7은 본 개시의 실시 형태에 있어서의 작물열 검출 시스템의 기본적인 구성예를 도시하는 블록도이다.
도 8은 본 개시의 실시 형태에 있어서의 처리 장치의 구성예를 모식적으로 도시하는 블록도이다.
도 9는 트랙터에 탑재된 차량 탑재 카메라가 취득한 시계열 컬러 화상에 있어서의 1프레임의 화상에 대응하는 모노크롬 화상이다.
도 10은 시계열 컬러 화상에 있어서의 1프레임의 화상의 RGB값을 녹색 과잉 지표(ExG=2×g-r-b)로 변환한 강조 화상을 도시하는 도면이다.
도 11은 도 10의 화상에 있어서의 녹색 과잉 지표(ExG)의 히스토그램이다.
도 12는 제1 화소(예를 들어 작물 화소)와 제2 화소(배경 화소)로 분류된 상면시 화상(부감 화상)의 예를 도시하는 도면이다.
도 13은 카메라 좌표계 Σc1 및 카메라 좌표계 Σc2의 각각과, 기준 평면 Re의 배치 관계를 모식적으로 도시하는 사시도이다.
도 14는 상면시 화상에 있어서의 작물열의 방향과 주사 라인의 방향이 평행한 예를 도시하는 모식도이다.
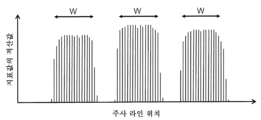
도 15는 도 14의 상면시 화상에 대하여 얻어진 적산값 히스토그램의 예를 모식적으로 도시하는 도면이다.
도 16은 상면시 화상에 있어서의 작물열의 방향과 주사 라인의 방향이 교차하는 예를 도시하는 모식도이다.
도 17은 도 16의 상면시 화상에 대하여 얻어진 적산값 히스토그램의 예를 모식적으로 도시하는 도면이다.
도 18은 본 개시의 실시 형태에 있어서의 처리 장치가 작물열의 에지 라인을 결정하는 알고리즘의 예를 도시하는 흐름도이다.
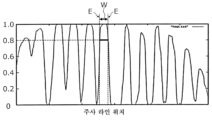
도 19는 도 12의 상면시 화상으로부터 얻어진 적산값 히스토그램을 도시하는 도면이다.
도 20은 본 개시의 실시 형태에 있어서의 처리 장치가 실행하는 처리를 도시하는 블록도이다.
도 21은 상면시 화상을 복수의 블록으로 분할하는 형태를 설명하기 위한 도면이다.
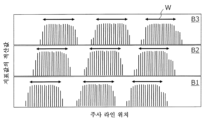
도 22는 도 21의 각 블록에 있어서의, 주사 라인의 위치와 지표값의 적산값의 관계를 모식적으로 도시하는 도면이다.
도 23은 도 22의 각 블록에 있어서의 작물열 중심과, 작물열 중심에 대한 근사선의 예를 도시하는 도면이다.
도 24는 도 23의 근사선에 기초하여 결정한 작물열의 에지 라인의 예를 도시하는 상면도이다.
도 25는 작물열이 곡선 상으로 구부러지는 부분을 포함하는 경우에 있어서, 상면시 화상의 일부 또는 전부를 복수의 블록으로 분할하고, 복수의 블록의 각각에 대해서, 에지 라인의 위치를 결정하는 방법을 설명하기 위한 도면이다.
도 26은 도 25의 각 블록에 있어서의, 주사 라인의 위치와 지표값의 적산값(히스토그램)의 관계를 모식적으로 도시하는 도면이다.
도 27은 도 26의 각 블록에 있어서의 작물열 중심과, 작물열 중심에 대한 근사선의 예를 도시하는 도면이다.
도 28은 도 27의 근사 곡선에 기초하여 결정한 작물열의 에지 라인의 예를 도시하는 상면도이다.
도 29는 본 개시의 실시 형태에 있어서의 농업 기계의 외관의 예를 도시하는 사시도이다.
도 30은 작업기가 장착된 상태의 농업 기계의 예를 모식적으로 도시하는 측면도이다.
도 31은 농업 기계 및 작업기의 개략적인 구성의 예를 도시하는 블록도이다.
도 2는 농업 기계에 대하여 고정된 보디 좌표계 Σb 및 카메라 좌표계 Σc와, 지면에 대하여 고정된 월드 좌표계 Σw의 관계를 모식적으로 도시하는 사시도이다.
도 3은 지면에 복수의 작물열이 마련된 포장의 일부를 모식적으로 도시하는 상면도이다.
도 4는 도 3에 도시하는 농업 기계의 촬상 장치가 취득한 화상의 예를 모식적으로 도시하는 도면이다.
도 5는 농업 기계의 위치 및 방향(요 방향의 각도)을 조정한 상태를 모식적으로 도시하는 상면도이다.
도 6은 도 5의 상태에 있는 농업 기계의 촬상 장치가 취득한 화상의 예를 도시하는 도면이다.
도 7은 본 개시의 실시 형태에 있어서의 작물열 검출 시스템의 기본적인 구성예를 도시하는 블록도이다.
도 8은 본 개시의 실시 형태에 있어서의 처리 장치의 구성예를 모식적으로 도시하는 블록도이다.
도 9는 트랙터에 탑재된 차량 탑재 카메라가 취득한 시계열 컬러 화상에 있어서의 1프레임의 화상에 대응하는 모노크롬 화상이다.
도 10은 시계열 컬러 화상에 있어서의 1프레임의 화상의 RGB값을 녹색 과잉 지표(ExG=2×g-r-b)로 변환한 강조 화상을 도시하는 도면이다.
도 11은 도 10의 화상에 있어서의 녹색 과잉 지표(ExG)의 히스토그램이다.
도 12는 제1 화소(예를 들어 작물 화소)와 제2 화소(배경 화소)로 분류된 상면시 화상(부감 화상)의 예를 도시하는 도면이다.
도 13은 카메라 좌표계 Σc1 및 카메라 좌표계 Σc2의 각각과, 기준 평면 Re의 배치 관계를 모식적으로 도시하는 사시도이다.
도 14는 상면시 화상에 있어서의 작물열의 방향과 주사 라인의 방향이 평행한 예를 도시하는 모식도이다.
도 15는 도 14의 상면시 화상에 대하여 얻어진 적산값 히스토그램의 예를 모식적으로 도시하는 도면이다.
도 16은 상면시 화상에 있어서의 작물열의 방향과 주사 라인의 방향이 교차하는 예를 도시하는 모식도이다.
도 17은 도 16의 상면시 화상에 대하여 얻어진 적산값 히스토그램의 예를 모식적으로 도시하는 도면이다.
도 18은 본 개시의 실시 형태에 있어서의 처리 장치가 작물열의 에지 라인을 결정하는 알고리즘의 예를 도시하는 흐름도이다.
도 19는 도 12의 상면시 화상으로부터 얻어진 적산값 히스토그램을 도시하는 도면이다.
도 20은 본 개시의 실시 형태에 있어서의 처리 장치가 실행하는 처리를 도시하는 블록도이다.
도 21은 상면시 화상을 복수의 블록으로 분할하는 형태를 설명하기 위한 도면이다.
도 22는 도 21의 각 블록에 있어서의, 주사 라인의 위치와 지표값의 적산값의 관계를 모식적으로 도시하는 도면이다.
도 23은 도 22의 각 블록에 있어서의 작물열 중심과, 작물열 중심에 대한 근사선의 예를 도시하는 도면이다.
도 24는 도 23의 근사선에 기초하여 결정한 작물열의 에지 라인의 예를 도시하는 상면도이다.
도 25는 작물열이 곡선 상으로 구부러지는 부분을 포함하는 경우에 있어서, 상면시 화상의 일부 또는 전부를 복수의 블록으로 분할하고, 복수의 블록의 각각에 대해서, 에지 라인의 위치를 결정하는 방법을 설명하기 위한 도면이다.
도 26은 도 25의 각 블록에 있어서의, 주사 라인의 위치와 지표값의 적산값(히스토그램)의 관계를 모식적으로 도시하는 도면이다.
도 27은 도 26의 각 블록에 있어서의 작물열 중심과, 작물열 중심에 대한 근사선의 예를 도시하는 도면이다.
도 28은 도 27의 근사 곡선에 기초하여 결정한 작물열의 에지 라인의 예를 도시하는 상면도이다.
도 29는 본 개시의 실시 형태에 있어서의 농업 기계의 외관의 예를 도시하는 사시도이다.
도 30은 작업기가 장착된 상태의 농업 기계의 예를 모식적으로 도시하는 측면도이다.
도 31은 농업 기계 및 작업기의 개략적인 구성의 예를 도시하는 블록도이다.
이하, 본 개시의 실시 형태를 설명한다. 단, 필요 이상으로 상세한 설명은 생략하는 경우가 있다. 예를 들어, 이미 잘 알려진 사항의 상세 설명 및 실질적으로 동일한 구성에 관한 중복되는 설명을 생략하는 경우가 있다. 이것은, 이하의 설명이 불필요하게 장황해지는 것을 피하고, 당업자의 이해를 용이하게 하기 위함이다. 또한, 발명자는, 당업자가 본 개시를 충분히 이해하게 하기 위해 첨부 도면 및 이하의 설명을 제공하는 것이며, 이들에 의해 특허 청구 범위에 기재된 주제를 한정하는 것을 의도하는 것은 아니다. 이하의 설명에 있어서, 동일하거나 또는 유사한 기능을 갖는 구성 요소에 대해서는, 동일한 참조 부호를 붙이고 있다.
하기의 실시 형태는 예시이고, 본 개시의 기술은, 이하의 실시 형태에 한정되지는 않는다. 예를 들어, 이하의 실시 형태에 대해서 나타내어지는 수치, 형상, 재료, 스텝, 그 스텝의 순서, 표시 화면의 레이아웃 등은, 어디까지나 일례이며, 기술적으로 모순이 발생하지 않는 한에 있어서 다양한 개변이 가능하다. 또한, 기술적으로 모순이 발생하지 않는 한에 있어서, 일 양태와 다른 양태를 조합하는 것이 가능하다.
본 개시에 있어서의 「농업 기계」는, 「갈고」, 「심고」, 「수확하는」 등의 농업의 기본적인 작업을 포장에서 행하는 기계를 넓게 포함한다. 농업 기계는 포장 내의 지면에 대하여, 경운, 파종, 방제, 시비, 작물의 식부 또는 수확 등의 농작업을 행하는 기능 및 구조를 구비하는 기계이다. 이들 농작업을 「대지 작업」 또는 단순히 「작업」이라고 칭하는 경우가 있다. 농업 기계는, 그 자체가 이동하기 위한 주행 장치를 구비하고 있을 필요는 없으며, 주행 장치를 구비하는 다른 차량에 장착되거나, 견인되거나 함으로써 주행해도 된다. 또한, 트랙터와 같은 작업 차량이 단독으로 「농업 기계」로서 기능하는 경우에 한정되지 않고, 작업 차량에 장착 또는 견인되는 작업기(임플먼트)와 작업 차량의 전체가 하나의 「농업 기계」로서 기능하는 경우가 있다. 농업 기계의 예는, 트랙터, 승용 관리기, 야채 이식기, 예초기, 및 포장용 이동 로봇을 포함한다.
(실시 형태 1)
본 개시의 예시적인 제1 실시 형태에 있어서의 작물열 검출 시스템 및 작물열 검출 방법을 설명한다.
본 실시 형태에 있어서의 작물열 검출 시스템은, 농업 기계에 설치되어 사용되는 촬상 장치를 구비한다. 촬상 장치는, 농업 기계가 주행하는 지면을 촬영하고, 지면의 적어도 일부를 포함하는 시계열 컬러 화상을 취득하도록 농업 기계에 고정되어 있다.
도 1은, 예를 들어 트랙터 또는 승용 관리기 등의 농업 기계(100)에 설치된 촬상 장치(120)가 지면(10)을 촬영하는 모습을 모식적으로 도시하고 있다. 도 1의 예에 있어서, 농업 기계(100)는 주행 가능한 차량 본체(110)를 구비하고, 촬상 장치(120)는 차량 본체(110)에 고정되어 있다. 참고를 위해, 도 1에는, 서로 직교하는 Xb축, Yb축, Zb축을 갖는 보디 좌표계 Σb가 도시되어 있다. 보디 좌표계 Σb는 농업 기계(100)에 고정된 좌표계이고, 보디 좌표계 Σb의 원점은, 예를 들어 농업 기계(100)의 무게 중심 부근에 설정될 수 있다. 도면에서는, 보기의 용이성을 위해, 보디 좌표계 Σb의 원점이 농업 기계(100)의 외부에 위치하고 있도록 기재되어 있다. 본 개시에 있어서의 보디 좌표계 Σb에서는, Xb축은 농업 기계(100)가 직진할 때의 주행 방향(화살표 F의 방향)에 일치하고 있다. Yb축은 좌표 원점으로부터 Xb축에 있어서의 정방향을 보았을 때의 바로 오른쪽 방향에 일치하고, Zb축은 연직 하방의 방향에 일치한다.
촬상 장치(120)는, 예를 들어 CCD(Charge Coupled Device) 또는 CMOS(Complementary Metal Oxide Semiconductor) 이미지 센서를 갖는 차량 탑재 카메라이다. 본 실시 형태에 있어서의 촬상 장치(120)는, 예를 들어 3프레임/초(fps: frames per second) 이상의 프레임 레이트로 동화상을 촬영할 수 있는 단안 카메라이다.
도 2는 상술한 보디 좌표계 Σb와, 촬상 장치(120)의 카메라 좌표계 Σc와, 지면(10)에 고정된 월드 좌표계 Σw의 관계를 모식적으로 도시하는 사시도이다. 카메라 좌표계 Σc는, 서로 직행하는 Xc축, Yc축, Zc축을 갖고 있고, 월드 좌표계 Σw는, 서로 직행하는 Xw축, Yw축, Zw축을 갖고 있다. 도 2의 예에 있어서, 월드 좌표계 Σw의 Xw축 및 Yw축은, 지면(10)을 따라서 확대되는 기준 평면 Re 상에 있다.
촬상 장치(120)는 농업 기계(100)의 소정 위치에 소정 방향을 향하도록 설치된다. 이 때문에, 보디 좌표계 Σb에 대한 카메라 좌표계 Σc의 위치 및 방향은, 기지의 상태로 고정된다. 카메라 좌표계 Σc의 Zc축은 카메라 광축 λ1 상에 있다. 도시되는 예에 있어서, 카메라 광축 λ1은 농업 기계(100)의 주행 방향 F로부터 지면(10)을 향하여 경사져 있고, 부각 Φ는 0°보다도 크다. 농업 기계(100)의 주행 방향 F는, 농업 기계(100)가 주행하고 있는 지면(10)에 대하여 개략적으로 평행하다. 부각 Φ는, 예를 들어 0° 이상 60° 이하의 범위로 설정될 수 있다. 촬상 장치(120)가 설치되는 위치가 지면(10)에 가까운 경우, 부각 Φ는 음의 값, 바꿔 말하면, 양의 앙각을 갖도록 카메라 광축 λ1의 방향이 설정되어 있어도 된다.
농업 기계(100)가 지면(10) 상을 주행하고 있을 때, 보디 좌표계 Σb 및 카메라 좌표계 Σc는 월드 좌표계 Σw에 대하여 병진한다. 주행 중, 농업 기계(100)가 피치, 롤, 요의 방향으로 회전 또는 요동하면, 보디 좌표계 Σb 및 카메라 좌표계 Σc는 월드 좌표계 Σw에 대하여 회전할 수 있다. 이하의 설명에 있어서는, 간단화를 위해, 농업 기계(100)는 피치 및 롤의 방향으로는 회전하지 않고, 지면(10)에 대하여 거의 평행하게 이동하는 것으로 한다.
도 3은 지면(10)에 복수의 작물열(12)이 마련되어 있는 포장의 일부를 모식적으로 도시하는 상면도이다. 작물열(12)이란, 포장의 지면(10)에 작물이 일방향으로 연속적으로 식부됨으로써 형성된 열이다. 바꿔 말하면, 작물열(12)이란, 포장의 이랑에 식부된 작물의 집합이다. 이와 같이, 개개의 작물열(12)은 포장에 심어진 작물의 집합이 형성하는 열이기 때문에, 작물열의 형상은, 엄밀하게는 작물의 형상 및 작물의 배치에 의존하여 복잡하다. 작물열(12)의 폭은, 작물의 생육에 따라서 변화한다.
인접하는 작물열(12)의 사이에는, 작물이 심어져 있지 않은 중간 영역(14)이 띠 형상으로 존재한다. 각 중간 영역(14)은 인접하는 2개의 작물열(12)의 사이에서 대향하는 2개의 에지 라인 E에 끼워진 영역이다. 또한, 하나의 이랑에 대하여, 이랑의 폭 방향으로 복수의 작물이 식부되는 경우, 하나의 이랑 상에 복수의 작물열(12)이 형성되게 된다. 즉, 이랑의 조 사이에 복수의 작물열(12)이 형성되게 된다. 이러한 경우는, 이랑 상에 형성된 복수의 작물열(12) 중, 이랑의 폭 방향의 단부에 위치하는 작물열(12)의 에지 라인 E가, 중간 영역(14)의 기준이 된다. 즉, 중간 영역(14)은 복수의 작물열(12)의 에지 라인 E 중, 이랑의 폭 방향의 단부에 위치하는 작물열(12)의 에지 라인 E 사이가 된다.
중간 영역(14)은 농업 기계(100)의 차륜이 통과하는 영역(작업 통로)으로서 기능하기 때문에, 「중간 영역」을 「작업 통로」라고 칭하는 경우가 있다.
본 개시에 있어서, 작물열의 「에지 라인」이란, 농업 기계가 주행할 때의 목표 경로를 규정하기 위한 기준의 선분(곡선을 포함할 수 있음)을 의미한다. 이러한 기준의 선분은, 농업 기계의 차륜의 통과가 허용되는 띠 형상의 영역(작업 통로)의 양단으로서 정의될 수 있다. 작물열의 「에지 라인」을 결정하는 구체적인 방법에 대해서는, 후술한다.
도 3에는 작물열(12)이 마련된 포장에 침입하고 있는 1대의 농업 기계(100)가 모식적으로 기재되어 있다. 이 농업 기계(100)는 좌우의 전륜(104F)과, 좌우의 후륜(104R)을 주행 장치로서 구비하고 있고, 작업기(임플먼트)(300)를 견인하고 있다. 전륜(104F)은 조타륜이다.
도 3의 예에서는, 중앙에 위치하는 1개의 작물열(12)의 양측에 위치하는 작업 통로(14)에, 각각, 굵은 파선의 화살표 L, R이 기재되어 있다. 농업 기계(100)가 실선의 화살표 C로 나타내어지는 목표 경로상을 주행할 때, 농업 기계(100)의 전륜(104F) 및 후륜(104R)은 작물열(12)을 밟지 않도록, 작업 통로(14) 안을 화살표 L, R을 따라서 이동할 것이 요구된다. 본 실시 형태에서는, 농업 기계(100)에 설치한 촬상 장치(120)를 사용하여 작물열(12)의 에지 라인 E를 검출할 수 있으므로, 전륜(104F) 및 후륜(104R)이 작업 통로(14) 안을 화살표 L, R을 따라서 이동하도록 농업 기계(100)의 조타ㆍ주행을 제어하는 것이 가능해진다. 이렇게 작물열의 에지 라인 E에 기초하여, 농업 기계(100)의 조타ㆍ주행을 제어하는 것을 「열 모방 주행 제어」라고 칭해도 된다.
도 4는 도 3에 도시하는 농업 기계(100)의 촬상 장치(120)가 취득한 화상(40)의 예를 모식적으로 도시하는 도면이다. 지면(10)에서 평행하게 연장되는 복수의 작물열(12) 및 중간 영역(작업 통로)(14)은, 이론적으로는, 지평선(11) 상에 있는 소실점 P0에서 교차한다. 소실점 P0이 화상(40)의 우측 영역에 위치하고 있는 이유는, 도 3에 도시되는 바와 같이, 농업 기계(100)의 주행 방향 F가, 작물열(12)이 연장되는 방향(화살표 C에 평행한 방향)에 대하여 경사져 있기 때문이다.
본 실시 형태에서는, 후술하는 방법에 의해, 일조 조건이나 작물의 생육 상태가 변화해도, 이러한 화상(40)으로부터 작물열(12)을 정확하게 검출하고, 작물열(12)의 에지 라인 E를 결정하는 것이 가능해진다. 그리고, 에지 라인 E에 기초하여, 농업 기계(100)가 진행해야 할 경로(목표 경로)를 적절하게 생성할 수 있다. 그 결과, 자동 조타에 의해, 농업 기계(100)의 전륜(104F) 및 후륜(104R)이 작업 통로(14) 안을 화살표 L, R을 따라서 이동하도록 농업 기계(100)의 주행을 제어하는 것(열 모방 주행 제어)이 가능해진다. 이러한 열 모방 주행 제어에 의하면, GNSS 등의 측위 시스템을 이용한 자동 조타 기술에서는 실현 곤란한, 작물의 생육 상황에 따른 정밀한 자동 조타가 가능해진다.
도 5는 목표 경로(화살표 C)에 대한 위치 오차를 축소하도록 농업 기계(100)를 조타하여 농업 기계(100)의 위치 및 방향(요 방향의 각도)을 조정한 상태를 모식적으로 도시하는 상면도이다. 도 6은 그러한 상태에 있는 농업 기계(100)의 촬상 장치(120)가 취득한 화상(40)의 예를 도시하는 도면이다. 도 5의 상태에 있는 농업 기계(100)의 전륜(104F) 및 후륜(104R)은, 각각, 작업 통로(14) 안을 화살표 L 및 화살표 R로 나타내어지는 라인 상에 위치하고 있다. 중앙의 화살표 C에 의해 나타내어지는 목표 경로 C를 따라서 농업 기계(100)가 주행할 때, 농업 기계(100)에 있어서의 자동 조타 장치는 전륜(104F) 및 후륜(104R)이, 각각, 작업 통로(14)로부터 일탈하지 않도록 조타륜의 조타각을 제어한다.
이하, 본 개시의 실시 형태에 의한 작물열 검출 시스템의 구성 및 동작을 상세하게 설명한다.
본 실시 형태에 의한 작물열 검출 시스템(1000)은, 도 7에 도시하는 바와 같이, 전술한 촬상 장치(120)와, 촬상 장치(120)로부터 취득한 시계열 컬러 화상의 화상 처리를 행하는 처리 장치(122)를 구비한다. 처리 장치(122)는, 예를 들어 농업 기계(100)가 구비하는 자동 조타 장치(124)에 접속될 수 있다. 자동 조타 장치(124)는, 예를 들어 농업 기계(100)의 주행을 제어하는 자동 운전 장치에 포함된다.
처리 장치(122)는 화상 인식용의 전자 제어 유닛(ECU)에 의해 실현될 수 있다. ECU는 차량 탑재용의 컴퓨터이다. 처리 장치(122)는 촬상 장치(120)가 출력하는 화상 데이터를 수취하도록, 예를 들어 와이어 하니스 등의 시리얼 신호선에 의해 촬상 장치(120)에 접속된다. 처리 장치(122)가 실행하는 화상 인식의 처리의 일부가 촬상 장치(120)의 내부(카메라 모듈 내)에서 실행되어도 된다.
도 8은 처리 장치(122)의 하드웨어 구성예를 도시하는 블록도이다. 처리 장치(122)는 프로세서(20), ROM(Read Only Memory)(22), RAM(Random Access Memory)(24), 통신 장치(26), 기억 장치(28)를 구비한다. 이들 구성 요소는, 버스(30)를 통해 서로 접속된다.
프로세서(20)는 반도체 집적 회로이고, 중앙 연산 처리 유닛(CPU) 또는 마이크로 프로세서라고도 칭해진다. 프로세서(20)는 화상 처리 유닛(GPU)을 포함하고 있어도 된다. 프로세서(20)는 ROM(22)에 저장된 소정의 명령군을 기술한 컴퓨터 프로그램을 축차 실행하고, 본 개시의 작물열 검출에 필요한 처리를 실현한다. 프로세서(20)의 일부 또는 전부는, CPU를 탑재한 FPGA(Field Programmable Gate Array), ASIC(Application Specific Integrated Circuit) 또는 ASSP(Application Specific Standard Product)여도 된다.
통신 장치(26)는 처리 장치(122)와 외부의 컴퓨터 사이에서 데이터 통신을 행하기 위한 인터페이스이다. 통신 장치(26)는 CAN(Controller Area Network) 등에 의한 유선 통신, 또는 Bluetooth(등록 상표) 규격 및/또는 Wi-Fi(등록 상표) 규격에 준거한 무선 통신을 행할 수 있다.
기억 장치(28)는 촬상 장치(120)로부터 취득한 화상, 또는 처리의 도중에 있어서의 화상의 데이터를 기억할 수 있다. 기억 장치(28)의 예는, 하드디스크 드라이브 또는 불휘발성 반도체 메모리를 포함한다.
처리 장치(122)의 하드웨어 구성은, 상기의 예에 한정되지는 않는다. 처리 장치(122)의 일부 또는 전부가 농업 기계(100)에 탑재되어 있을 필요는 없다. 통신 장치(26)를 이용함으로써, 농업 기계(100)의 외부에 위치하는 하나 또는 복수의 컴퓨터를 처리 장치(122)의 일부 또는 전부로서 기능시키는 것도 가능하다. 예를 들어, 네트워크에 접속된 서버 컴퓨터가 처리 장치(122)의 일부 또는 전부로서 기능할 수 있다. 한편, 농업 기계(100)가 탑재하는 컴퓨터가 처리 장치(122)에 요구되는 모든 기능을 실행해도 된다.
본 실시 형태에서는, 이러한 처리 장치(122)가 촬상 장치(120)로부터 시계열 컬러 화상을 취득하고, 하기의 동작 S1, S2, S3을 실행한다.
(S1) 시계열 컬러 화상으로부터, 검출 대상인 작물열의 색을 강조한 강조 화상을 생성한다.
(S2) 강조 화상으로부터, 작물열의 색의 지표값이 역치 이상의 제1 화소와, 이 지표값이 역치 미만의 제2 화소로 분류된, 지면의 상방에서 본 상면시 화상을 생성한다.
(S3) 제1 화소의 상기 지표값에 기초하여, 작물열의 에지 라인의 위치를 결정한다.
이하, 동작 S1, S2, S3의 구체예를 상세하게 설명한다.
시계열 컬러 화상은, 촬상 장치(120)가 촬영에 의해 시계열적으로 취득한 화상의 집합이다. 각각의 화상은, 프레임 단위의 화소군에 의해 구성된다. 예를 들어, 촬상 장치(120)가 30프레임/초의 프레임 레이트로 화상을 출력하는 경우, 처리 장치(122)는 약 33밀리초의 주기로 새로운 화상을 취득하는 것이 가능하다. 트랙터 등의 농업 기계(100)가 포장 내를 주행하는 속도는, 공도를 주행하는 일반적인 자동차의 속도에 비해 상대적으로 낮고, 예를 들어 시속 10킬로미터 정도 이하일 수 있다. 시속 10킬로미터의 경우, 약 33밀리초에 진행하는 거리는 약 6센티미터이다. 이 때문에, 처리 장치(122)는, 예를 들어 100 내지 300밀리초 정도의 주기로 화상을 취득해도 되고, 촬상 장치(120)가 촬상하는 모든 프레임의 화상을 처리할 필요는 없다. 처리 장치(122)가 처리의 대상으로 하는 화상의 취득 주기는, 농업 기계(100)의 주행 속도에 따라서, 처리 장치(122)가 자동적으로 변경해도 된다.
도 9는 농업 기계에 탑재된 촬상 장치(이 예에서는 단안 카메라)가 취득한 시계열 컬러 화상에 있어서의 1프레임의 화상(40)에 대응하는 화상이다. 도 9의 화상에는, 포장의 지면에 열 형상으로 심어진 작물의 열(작물열)이 비춰지고 있다. 이 예에 있어서, 작물의 열은 지면 상에서, 거의 평행하고 또한 등간격으로 배열되고, 촬상 장치의 카메라 광축은 농업 기계의 진행 방향을 향하고 있다. 전술한 바와 같이, 카메라 광축은 농업 기계의 진행 방향에 대하여 평행할 필요는 없고, 농업 기계의 진행 방향의 전방에서 지면에 입사하고 있어도 된다. 촬상 장치의 설치 위치는, 이 예에 한정되지는 않는다. 농업 기계에 복수의 촬상 장치가 설치되는 경우, 몇 가지의 촬상 장치는 진행 방향에 대하여 반대의 방향, 혹은, 진행 방향과 교차하는 방향으로 카메라 광축을 향하고 있어도 된다.
동작 S1에서는, 도 7의 처리 장치(122)가 촬상 장치(120)로부터 취득한 시계열 컬러 화상에 기초하여, 검출 대상인 작물열의 색을 강조한 화상(강조 화상)을 생성한다. 작물은 태양광(백색광)을 받아서 광합성을 행하기 위해, 클로로필(엽록소)을 갖고 있다. 클로로필은 적색 및 청색에 비해, 녹색의 광흡수율이 낮다. 이 때문에, 작물에 의해 반사되는 태양광의 스펙트럼은, 토양 표면에 의해 반사되는 태양광의 스펙트럼에 비해, 녹색의 파장 범위에서 상대적으로 높은 값을 나타낸다. 그 결과, 작물의 색은, 일반적으로 녹색의 성분을 많이 포함하고, 「작물열의 색」은, 전형례에는 녹색이다. 그러나, 후술하는 바와 같이, 「작물열의 색」은, 녹색에 한정되지는 않는다.
촬상 장치(120)에 있어서의 이미지 센서는, 행 및 열 형상으로 배열된 다수의 광검출 셀을 갖고 있다. 개개의 광검출 셀은, 화상을 구성하는 화소(픽셀)에 대응하고, 적색의 광의 강도를 검출하는 R 서브 화소, 녹색의 광의 강도를 검출하는 G 서브 화소, 및 청색의 광의 강도를 검출하는 B 서브 화소를 포함한다. 각 광검출 셀에 있어서의 R 서브 화소, G 서브 화소 및 B 서브 화소로 검출되는 광의 출력을, 각각, R값, G값 및 B값이라고 칭하기로 한다. 이하, R값, G값 및 B값을 총칭하여 「화소값」 또는 「RGB값」이라고 칭하는 경우가 있다. R값, G값 및 B값을 사용하는 경우, RGB 색 공간 내의 좌푯값에 의해 색을 규정할 수 있다.
검출 대상인 작물열의 색이 녹색인 경우, 작물열의 색을 강조한 강조 화상이란, 촬상 장치가 취득한 컬러 화상에 있어서의 각 화소의 RGB값을, G값의 웨이트가 상대적으로 큰 화소값으로 변환한 화상이다. 강조 화상을 생성하기 위한, 이러한 화소값의 변환은, 예를 들어 「(2×G값-R값-B값)/(R값+G값+B값)」에 의해 정의된다. 여기서, 분모인 (R값+G값+B값)은 규격화를 위한 인자이다. 이하, 규격화된 RGB값을 rgb값이라고 칭하고, r=R값/(R값+G값+B값), g=G값/(R값+G값+B값), b=B값/(R값+G값+B값)에 의해 정의한다. 「2×g-r-b」는 녹색 과잉 지표(ExG: Excess Green Index)라고 불린다.
도 10은 도 9의 화상에 있어서의 RGB값을, 「2×g-r-b」로 변환한 강조 화상(42)을 도시하는 도면이다. 이 변환에 의해, 도 10의 화상(42)에 있어서, 「r+b」가 g에 비해 상대적으로 작은 화소는 밝게 표시되고, 「r+b」가 g에 비해 상대적으로 큰 화소는 어둡게 표시된다. 이 변환에 의해, 검출 대상인 작물열의 색(이 예에서는 「녹색」)을 강조한 화상(강조 화상)(42)이 얻어진다. 도 10의 화상에 있어서 상대적으로 밝은 화소는, 녹색의 성분이 상대적으로 큰 화소이고, 작물의 영역에 속해 있다.
작물의 색을 강조하는 「색의 지표값」으로서, 녹색 과잉 지표(ExG) 이외에, 예를 들어 녹적 식생 지표(G값-R값)/(G값+R값) 등의 다른 지표를 사용해도 된다. 또한, 촬상 장치가 적외 카메라로서도 기능할 수 있는 경우는, 「작물열의 색의 지표값」으로서, NDVI(Normalized Difference Vegetation Index)를 사용해도 된다.
또한, 작물열의 각각의 열이 「멀티」라고 불리는 시트(mulching sheet)에 의해 덮여 있는 경우가 있다. 이러한 경우, 「작물열의 색」은, 「작물을 덮어서 열 형상으로 배치되는 물체의 색」이다. 구체적으로는, 시트의 색이 무채색인 흑색의 경우, 「작물열의 색」은 「흑색」을 의미한다. 또한, 시트의 색이 적색인 경우, 「작물열의 색」은 「적색」을 의미한다. 이렇게 「작물열의 색」은, 작물 그 자체의 색뿐만 아니라, 작물열을 규정하는 영역의 색(토양 표면의 색으로부터 식별 가능한 색)을 의미한다.
「작물열의 색」을 강조한 강조 화상의 생성에는, RGB 색 공간으로부터 HSV 색 공간으로의 변환을 이용해도 된다. HSV 색 공간은, 색상(Hue), 채도(Saturation), 명도(Value)의 3개의 성분에 의해 구성되는 색 공간이다. RGB 색 공간으로부터 HSV 색 공간으로 변환한 색 정보를 사용함으로써, 흑색 또는 백색과 같은 채도가 낮은 「색」을 검출할 수 있다. OpenCV의 라이브러리를 이용하여 「흑색」을 검출하는 경우, 색상을 최대 범위(0 내지 179), 채도를 최대 범위(0 내지 255)로 설정하고, 명도의 범위를 0 내지 30으로 설정하면 된다. 또한, 「백색」을 검출하는 경우는, 색상을 최대 범위(0 내지 179), 채도를 최대 범위(0 내지 255)로 설정하고, 명도의 범위를 200 내지 255로 설정하면 된다. 이러한 설정 범위에 포함되는 색상, 채도, 명도를 갖는 화소가, 검출해야 할 색을 갖는 화소이다. 또한, 예를 들어 녹색의 화소를 검출하는 경우, 색상의 범위를 예를 들어 30 내지 90의 범위로 설정하면 된다.
검출 대상인 작물열의 색을 강조한 화상(강조 화상)을 생성함으로써, 작물열의 영역을, 그 이외의 배경 영역으로부터 구분(추출)하는 것(세그멘테이션)이 용이해진다.
다음으로, 동작 S2를 설명한다.
동작 S2에서는, 처리 장치(122)가 강조 화상(42)으로부터, 작물열의 색의 지표값이 역치 이상의 제1 화소와, 이 지표값이 역치 미만의 제2 화소로 분류된 상면시 화상을 생성한다. 상면시 화상은, 지면의 상방에서 본 화상이다.
본 실시 형태에서는, 작물열의 색의 지표값으로서, 전술한 녹색 과잉 지표(ExG)를 채용하고, 판별 분석법(오쓰의 2치화)에 의해 판별의 역치를 결정한다. 도 11은 도 10의 강조 화상(42)에 있어서의 녹색 과잉 지표(ExG)의 히스토그램이다. 히스토그램의 횡축이 녹색 과잉 지표(ExG)이고, 종축이 화상 내에 있어서의 화소수(생기 빈도에 대응)이다. 도 11에는 판별 분석법의 알고리즘에 의해 산출된 역치 Th를 나타내는 파선이 도시되어 있다. 강조 화상(42)의 화소는, 이 역치 Th에 의해 2개의 클래스로 분류된다. 역치 Th를 나타내는 파선의 우측에는, 녹색 과잉 지표(ExG)가 역치 이상의 화소의 생기 빈도가 도시되어 있고, 이들 화소는 작물의 클래스에 속하는 것으로 추정된다. 이에 반해, 역치 Th를 나타내는 파선의 좌측에는, 녹색 과잉 지표(ExG)가 역치 미만의 화소의 생기 빈도가 도시되어 있고, 이들 화소는 토양 등의 피작물의 클래스에 속하는 것으로 추정된다. 이 예에 있어서, 지표값이 역치 이상의 화소인 제1 화소는, 「작물 화소」에 상당한다. 한편, 이 지표값이 역치 미만의 제2 화소는 「배경 화소」에 상당한다. 배경 화소는 토양의 표면 등, 검출 대상 이외의 물체에 대응하고, 전술한 중간 영역(작업 통로)(14)은, 배경 화소에 의해 구성될 수 있다. 또한, 역치의 결정 방법은, 상기의 예에 한정되지 않고, 예를 들어 기계 학습을 이용한 다른 방법을 사용하여 역치를 결정해도 된다.
강조 화상(42)을 구성하는 각 화소를 「제1 화소」 및 「제2 화소」의 한쪽에 할당함으로써, 강조 화상(42)으로부터 검출 대상의 영역을 추출할 수 있다. 또한, 「제2 화소」의 화소값에 「제로」를 부여하거나, 화상 데이터로부터 제2 화소의 데이터를 제거하거나 함으로써, 검출 대상 이외의 영역을 마스크할 수 있다. 마스크해야 할 영역을 확정할 때, 녹색 과잉 지표(ExG)가 국소적으로 높은 값을 나타내는 화소를 노이즈로서 마스크 영역에 포함하는 처리를 행해도 된다.
도 12는, 제1 화소와 제2 화소로 분류된, 지면의 상방에서 본 상면시 화상(44)의 예를 도시하는 도면이다. 도 12의 상면시 화상(44)은, 후술하는 화상 변환의 기술에 의해, 도 10의 강조 화상(42)으로부터 작성한 화상이다. 이 상면시 화상(44)에 있어서, 작물열의 색의 지표값(이 예에서는 녹색 과잉 지표)이 역치 Th 미만의 제2 화소는, 검은 화소(명도가 제로로 설정된 화소)이다. 제2 화소에 의해 구성되는 영역은, 주로 지면에 있어서의 토양의 표면이 보이는 영역이다. 도 12의 상면시 화상(44)에는, 하변에 접하는 좌우의 모퉁이부에 검은 삼각형의 영역이 존재한다. 이 삼각형의 영역은, 도 10의 강조 화상(42)에는 비춰지지 않은 영역에 상당한다. 또한, 도 9의 화상(40) 및 도 10의 강조 화상(42)에는, 본래는 직선이어야 하는 선이 화상의 주변부에서 변형되는 현상이 관찰된다. 이러한 화상의 변형은 카메라의 렌즈의 성능에 기인하여 발생하고 있으며, 카메라의 내부 파라미터를 사용하여 보정될 수 있다. 작물 영역의 강조, 마스크, 변형의 보정 등의 처리는, 전처리라고 칭할 수 있다. 전처리는, 이러한 처리 이외의 처리를 포함하고 있어도 된다.
도 12의 상면시 화상(44)은 지면에 평행한 기준 평면 Re를, 기준 평면 Re의 법선 방향에 있어서의 바로 위에서 본 부감 화상이다. 이 부감 화상은, 도 10의 강조 화상(42)으로부터 호모그래피 변환(평면 사영 변환)에 의해 생성할 수 있다. 호모그래피 변환은 기하학적 변환의 1종이고, 3차원 공간 내의, 어느 평면 상에 있는 점을, 다른 임의의 평면 상에 있는 점으로 변환할 수 있다.
도 13은, 제1 자세(위치 및 방향: 포즈)에 있는 촬상 장치의 카메라 좌표계 Σc1 및 제2 자세에 있는 촬상 장치의 카메라 좌표계 Σc2의 각각과, 기준 평면 Re의 배치 관계를 모식적으로 도시하는 사시도이다. 도시되는 예에 있어서, 카메라 좌표계 Σc1은, 그 Zc축이 기준 평면 Re에 비스듬히 교차하도록 경사져 있다. 제1 자세에 있는 촬상 장치는 농업 기계에 설치된 촬상 장치에 상당한다. 이에 반해, 카메라 좌표계 Σc2는, 그 Zc축이 기준 평면 Re에 직교하고 있다. 바꿔 말하면, 카메라 좌표계 Σc2는 기준 평면 Re를, 기준 평면 Re의 법선 방향에 있어서의 바로 위에서 본 부감 화상을 취득할 수 있도록 배치된 상태에 있다.
카메라 좌표계 Σc1의 원점 O1로부터 Zc축에서 카메라의 초점 거리만큼 이격된 위치에 가상적인 화상 평면 Im1이 존재한다. 화상 평면 Im1은 Zc축 및 카메라 광축 λ1에 직교한다. 화상 평면 Im1 상의 화소 위치는, 서로 직교하는 u축 및 v축을 갖는 화상 좌표계에 의해 정의된다. 예를 들어, 기준 평면 Re 상에 위치하는 점 P1 및 점 P2의 좌표가, 각각, 월드 좌표계 Σw에 있어서, (X1, Y1, Z1) 및 (X2, Y2, Z2)라고 한다. 도 13의 예에서는, 월드 좌표계 Σw의 Xw축 및 Yw축이 기준 평면 Re 상에 있다. 이 때문에, Z1=Z2=0이다. 기준 평면 Re는, 지면을 따라서 확대되도록 설정된다.
기준 평면 Re 상의 점 P1 및 점 P2는, 각각, 핀홀 카메라 모델의 투시 투영에 의해, 제1 자세에 있는 촬상 장치의 화상 평면 Im1 상의 점 p1 및 점 p2로 변환된다. 화상 평면 Im1에 있어서, 점 p1 및 점 p2는, 각각, (u1, v1) 및 (u2, v2)의 좌표로 나타내어지는 화소 위치에 있다.
촬상 장치가 제2 자세에 있는 경우, 카메라 좌표계 Σc2의 원점 O2로부터 Zc축에서 카메라의 초점 거리만큼 이격된 위치에 가상적인 화상 평면 Im2가 존재한다. 이 예에 있어서, 화상 평면 Im2는 기준 평면 Re에 평행하다. 화상 평면 Im2 상의 화소 위치는, 서로 직교하는 u*축 및 v*축을 갖는 화상 좌표계에 의해 정의된다. 기준 평면 Re 상의 점 P1 및 점 P2는, 각각, 투시 투영에 의해, 화상 평면 Im2 상의 점 p1* 및 점 p2*로 변환된다. 화상 평면 Im2에 있어서, 점 p1* 및 점 p2*는, 각각, (u1*, v1*) 및 (u2*, v2*)의 좌표로 나타내어지는 화소 위치에 있다.
기준 평면 Re(월드 좌표계 Σw)에 대한 카메라 좌표계 Σc1, Σc2의 배치 관계가 부여되면, 호모그래피 변환에 의해, 화상 평면 Im1 상의 임의의 점(u, v)으로부터, 화상 평면 Im2 상에서 대응하는 점(u*, v*)을 구할 수 있다. 이러한 호모그래피 변환은 점의 좌표를 동차 좌표계로 표현하면, 3행×3열의 변환 행렬 H에 의해 규정된다.
[수 1]
변환 행렬 H의 내용은, 이하에 나타내는 바와 같이, h11, h12, ㆍㆍㆍ, h32의 수치에 의해 규정된다.
[수 2]
8개의 수치(h11, h12, ㆍㆍㆍ, h32)는 농업 기계(100)에 설치되는 촬상 장치(120)에 의해, 기준 평면 Re 상에 둔 교정용 보드를 촬영하면, 공지된 알고리즘을 사용하여 산출할 수 있다.
기준 평면 Re 상의 점의 좌표가 (X, Y, 0)인 경우, 각각의 카메라의 화상 평면 Im1, Im2에 있어서의 대응점의 좌표는, 하기의 수 3 및 수 4의 식에 나타내어지는 바와 같이, 개개의 호모그래피 변환 행렬 H1, H2에 의해 점(X, Y, 0)과 대응지어진다.
[수 3]
[수 4]
상기의 수 2로부터 이하의 식이 유도된다. 이 식으로부터 명백한 바와 같이, 변환 행렬 H는 H2H1-1과 동등하다. H1-1은, H1의 역행렬이다.
[수 5]
변환 행렬 H1, H2의 내용은, 기준 평면 Re에 의존하기 때문에, 기준 평면 Re의 위치가 바뀌면, 변환 행렬 H의 내용도 변화한다.
이러한 호모그래피 변환을 이용함으로써, 제1 자세에 있는 촬상 장치(농업 기계에 설치된 촬상 장치)에서 취득한 지면의 화상으로부터, 지면의 상면시 화상을 생성할 수 있다. 바꿔 말하면, 호모그래피 변환에 의하면, 촬상 장치(120)의 화상 평면 Im1 상에 있는 임의의 점의 좌표를, 기준 평면 Re에 대하여 소정의 자세에 있는 가상적인 촬상 장치의 화상 평면 Im2 상에 있는 점의 좌표로 변환할 수 있다.
처리 장치(122)는 변환 행렬 H의 내용을 산출한 후, 상기의 알고리즘에 기초하는 소프트웨어 프로그램을 실행함으로써, 시계열 컬러 화상 또는 시계열 컬러 화상의 전처리 화상으로부터, 지면(10)을 상방에서 본 부감 화상을 생성한다.
또한, 전술한 설명에서는, 3차원 공간 내의 점(예를 들어, P1, P2)이, 모두 기준 평면 Re 상에 위치하고 있다고 가정하고 있었다(예를 들어, Z1=Z2=0). 작물의 기준 평면 Re에 대한 높이가 0이 아닌 경우, 호모그래피 변환 후의 상면시 화상에 있어서, 대응점의 위치는 올바른 위치로부터 시프트한다. 시프트량의 증가를 억제하기 위해서는, 기준 평면 Re의 높이가 검출 대상인 작물의 높이에 가까운 것이 바람직하다. 지면(10)에는 이랑, 두렁, 도랑 등의 요철이 존재하고 있는 경우가 있다. 그러한 경우, 기준 평면 Re를, 이러한 요철의 저부로부터 상방으로 변위시켜도 된다. 변위의 거리는, 작물이 식부되는 지면(10)의 요철에 따라서 적절하게 설정될 수 있다.
또한, 농업 기계(100)가 지면(10)을 주행하고 있을 때, 차량 본체(110)(도 1 참조)의 롤 또는 피치의 운동이 발생하면, 촬상 장치(120)의 자세가 변화하기 때문에, 변환 행렬 H1의 내용이 변화할 수 있다. 이러한 경우, IMU에 의해 차량 본체(110)의 롤 및 피치의 회전 각도를 계측하면, 촬상 장치의 자세 변화에 따라서 변환 행렬 H1 및 변환 행렬 H를 보정할 수 있다.
본 실시 형태에 있어서의 처리 장치(122)는, 상술한 방법에 의해, 작물열의 색의 지표값이 역치 이상의 제1 화소와, 이 지표값이 역치 미만의 제2 화소로 분류된, 지면의 상방에서 본 상면시 화상을 생성한 후, 동작 S3을 실행한다.
다음으로, 동작 S3을 설명한다.
동작 S3에서는, 처리 장치(122)가 제1 화소의 지표값에 기초하여, 작물열의 에지 라인의 위치를 결정한다. 구체적으로는, 상면시 화상에 있어서의 복수의 주사 라인을 따라서 제1 화소(색의 지표값이 역치 이상의 화소)의 지표값을 적산한다.
도 14는 3개의 작물열(12)이 비춰지는 상면시 화상(44)의 예이다. 이 예에 있어서, 작물열(12)의 방향이 화상 수직 방향(v축 방향)에 평행하다. 도 14는 화상 수직 방향(v축 방향)에 평행한 다수의 주사 라인(파선) S가 도시되어 있다. 처리 장치(122)는 복수의 주사 라인 S 상에 위치하는 화소의 지표값을, 주사 라인 S마다 적산하여 적산값을 얻는다.
도 15는 도 14의 상면시 화상에 대하여 얻어진, 주사 라인 S의 위치와 지표값의 적산값의 관계(적산값의 히스토그램)를 모식적으로 도시하는 도면이다. 도 15의 횡축은 주사 라인 S의, 화상 수평 방향(u축 방향)에 있어서의 위치를 도시하고 있다. 상면시 화상(44)에 있어서, 주사 라인 S가 가로지르는 화소의 대부분이 작물열(12)에 속하는 제1 화소인 경우, 그 주사 라인 S의 적산값은 커진다. 한편, 주사 라인 S가 가로지르는 화소의 대부분이 작물열(12)의 사이에 있는 중간 영역(작업 통로)(14)에 속하는 제2 화소(배경 화소)인 경우, 그 주사 라인 S의 적산값은 작아진다. 또한, 본 실시 형태에 있어서, 중간 영역(작업 통로)(14)은 마스크되어 있고, 제2 화소의 지표값은 제로이다.
도 15의 히스토그램에서는, 적산값이 제로 또는 제로에 가까운 오목부 영역과, 이들 오목부 영역에 의해 구분되는 볼록부 영역이 존재한다. 오목부 영역은 중간 영역(작업 통로)(14)에 상당하고, 볼록부 영역이 작물열(12)에 상당한다. 본 실시 형태에서는, 볼록부 영역에 있어서의 적산값의 피크의 양측의 소정 위치, 구체적으로는, 적산값의 피크에 대하여 소정의 비율(예를 들어 60% 이상 90% 이하의 범위로부터 선택된 값)에 있는 적산값을 갖는 주사 라인 S의 위치를 작물열(12)의 에지 라인의 위치로서 결정한다. 도 15에 있어서의 화살표 W의 양단은, 각 작물열(12)의 에지 라인의 위치를 도시하고 있다. 또한, 도 15의 예에 있어서, 각 작물열(12)의 에지 라인의 위치는, 각 작물열(12)의 적산값의 피크에 대하여 80%의 값을 갖는 주사 라인 S의 위치이다.
본 실시 형태에서는, 제2 화소를 마스크한 후, 각 주사 라인 S 상에 있어서의 작물열의 색의 지표값을 적산하고 있다. 즉, 제1 화소와 제2 화소의 분류에 기초하여 2치화된 상면시 화상에 대해서, 제1 화소의 개수(화소수)를 카운트하고 있는 것은 아니다. 제1 화소의 개수를 카운트하는 경우, 예를 들어 낙엽이나 잡초 등에 기인하여 역치 Th를 조금 초과하는 화소(제1 화소로 분류됨)가 다수 존재하는 경우, 제1 화소의 카운트값은 증가해 버린다. 이에 반해, 본 개시의 실시 형태와 같이, 제1 화소의 개수가 아니라, 제1 화소의 작물열의 색의 지표값을 적산하는 것은, 낙엽이나 잡초에 기인하는 오판정을 억제하여, 작물열 검출의 로버스트성을 향상시킨다.
도 16은 작물열(12)이 비스듬히 연장되어 있는 상면시 화상(44)의 예이다. 도 3 및 도 4를 참조하여 설명한 바와 같이, 농업 기계(100)의 방향에 따라서는, 촬상 장치(120)가 취득하는 화상(40)에 있어서 작물열(12)이 연장되는 방향이 화상 내에서 우측 또는 좌측으로 경사질 수 있다. 그러한 화상으로부터 호모그래피 변환에 의해 상면시 화상(44)을 생성하면, 도 16의 예와 같이, 작물열(12)의 방향이, 화상 수직 방향(v축 방향)으로부터 경사진다.
도 16에도, 화상 수직 방향(v축 방향)에 평행한 다수의 주사 라인(파선) S가 도시되어 있다. 처리 장치(122)가, 이러한 복수의 주사 라인 S 상에 위치하는 화소의 지표값을, 주사 라인 S마다 적산하여 적산값을 얻으면, 도 17에 도시하는 바와 같은 적산값의 히스토그램이 얻어진다. 도 17은 도 16의 상면시 화상에 대하여 얻어진, 주사 라인 S의 위치와 지표값의 적산값의 관계를 모식적으로 도시하는 도면이다. 이 히스토그램으로부터는, 작물열(12)의 에지 라인을 결정할 수 없다.
도 18은 주사 라인 S의 방향(각도)을 변화시킴으로써, 작물열(12)의 방향에 평행한 주사 라인 S의 방향(각도)을 탐색하는 수순의 예를 도시하는 흐름도이다.
스텝 S10에 있어서, 주사 라인 S의 방향(각도)을 설정한다. 여기서는, 화상 좌표계에 있어서의 u축을 기준으로 하여 시계 방향의 각도를 θ로 한다(도 14, 도 16 참조). 각도 θ의 탐색은, 범위를 예를 들어 60 내지 120도로 설정하고, 각도 간격을 예를 들어 1도로 설정할 수 있다. 이 경우, 스텝 S1에서는, 주사 라인 S의 각도 θ로서, 60, 61, 62, ㆍㆍㆍ, 119, 120도를 부여한다.
스텝 S12에서는, 각각의 각도 θ의 방향으로 연장되는 주사 라인 S 상의 화소에 대하여 지표값을 적산하고, 적산값의 히스토그램을 작성한다. 히스토그램은 각도 θ에 따라서, 다른 분포를 나타내게 된다.
스텝 S14에서는, 이렇게 하여 얻은 복수의 히스토그램으로부터, 도 15에 도시되는 바와 같은 요철의 경계가 급준하며, 작물열(12)이 중간 영역(14)으로부터 명확하게 구분되는 히스토그램을 선택하고, 그 히스토그램을 생성하는 주사 라인 S의 각도 θ를 구한다.
스텝 S16에서는, 스텝 S14에서 구한 각도 θ에 대응하는 히스토그램의 피크값으로부터 각 작물열(12)의 에지 라인을 결정한다. 전술한 바와 같이, 피크의 예를 들어 0.8배의 적산값을 갖는 주사 라인 S의 위치를 에지 라인으로서 채용할 수 있다.
또한, 주사 라인 S의 방향(각도)을 탐색할 때, 탐색 범위 내에서 각도 θ를 1도씩 변화시킬 때마다, 그 각도 θ의 주사 라인 S 상에 있어서의 적산값의 히스토그램을 작성해도 된다. 히스토그램의 파형으로부터 특징량(예를 들어, 오목부의 깊이/볼록부의 높이, 포락선의 미분값 등)을 산출하고, 그 특징량에 기초하여, 작물열(12)의 방향과 주사 라인 S의 방향이 평행인지 여부를 판정해도 된다.
또한, 각도 θ를 구하는 방법은, 상기의 예에 한정되지는 않는다. 작물열이 연장되는 방향이 측정에 의해 기지인 경우, 농업 기계(100)에 탑재한 관성 계측 장치(IMU)에 의해 농업 기계의 방향을 측정하고, 작물열이 연장되는 방향에 대한 각도 θ를 구해도 된다.
도 19는 도 12의 상면시 화상으로부터 작성한, 적산값 히스토그램의 예를 도시하는 도면이다. 중앙에 위치하는 히스토그램의 볼록부에 대해서, 그 피크값의 0.8배의 주사 라인 위치를 에지 라인 E의 위치로 하고 있다. 이 히스토그램에서는, 주사 라인 위치가 중앙으로부터 좌우로 이격됨에 따라서, 볼록부의 피크가 낮아지고, 또한 볼록부의 피크가 확대되어 있다. 이것은, 도 12의 화상으로부터 명백한 바와 같이, 상면시 화상의 중앙에서는, 화상의 변형이 적은 것에 반해, 중앙으로부터 좌우로 이격됨에 따라서, 화상의 변형이 크게 되어 있는 것이나, 하변의 양측에 위치하는 검은 삼각형 영역이 적산값을 저하시키는 것에 기인하고 있다.
작물열의 검출을 농업 기계의 주행에 이용하는 경우, 정확하게 검출해야 할 작물열은, 화상의 중앙, 또는 그 주변이다. 그 때문에, 상면시 화상에 있어서의 좌우 양단에 가까운 영역에 있어서의 변형은 무시할 수 있다.
도 20은 본 실시 형태에 있어서의 처리 장치(122)가 실행하는 일련의 처리를 도시하는 블록도이다. 도 20에 도시되는 바와 같이, 처리 장치(122)는 화상 취득(32), 강조 화상 생성(33), 작물열 추출(34), 및 호모그래피 변환(35)을 실행함으로써, 예를 들어 도 16에 도시하는 바와 같은 상면시 화상(44)을 얻을 수 있다. 처리 장치(122)는, 또한 주사 라인 방향 결정(36), 에지 라인 위치 결정(37)을 실행함으로써, 작물열의 에지 라인의 위치를 얻을 수 있다. 이 후, 처리 장치(122), 또는 처리 장치(122)로부터 에지 라인의 위치를 나타내는 정보를 얻은 경로 생성 장치는 에지 라인에 기초하여, 농업 기계의 목표 경로 생성(38)을 실행할 수 있다. 목표 경로는 농업 기계가 구비하는 차륜이, 에지 라인 E에 끼워지는 중간 영역(작업 통로)(14) 중에 유지되도록 생성될 수 있다. 예를 들어, 타이어의 폭 방향에 있어서의 중앙부가, 중간 영역(작업 통로)(14)의 양단에 위치하는 2개의 에지 라인의 중앙을 통과하도록 목표 경로가 생성될 수 있다. 이러한 목표 경로에 의하면, 농업 기계가 주행 중에 목표 경로로부터 수센티미터 정도 어긋나도, 타이어가 작물열에 침입할 가능성을 저하시키는 것이 가능해진다.
본 개시의 실시 형태에 따르면, 순광, 역광, 맑은 하늘, 운천, 안개 등의 기상 조건이나 작업 시간대에 따라서 변화하는 일조 조건의 영향을 억제하여, 고정밀도로의 작물열의 검출이 가능해지는 것을 확인하였다. 또한, 작물의 종류(양배추, 브로콜리, 무, 당근, 양상추, 배추 등의 종별), 생육 상태(모종으로부터 성장한 상태까지), 병해 유무, 낙엽ㆍ잡초의 유무, 토양색이 변화해도 로버스트성이 높은 작물열의 검출이 가능해지는 것을 확인하였다.
또한, 상기의 실시 형태에서는, 2치화의 역치를 구하고, 역치 이상의 화소에 의해 작물 영역을 추출하는 스텝을 행한 후, 호모그래피 변환을 실행하고 있다. 그러나, 작물 영역을 추출하는 스텝은 호모그래피 변환 후에 실행해도 된다. 구체적으로는, 도 20에 도시되는 일련의 처리에 있어서, 호모그래피 변환(35)은 강조 화상 생성(33)과 작물열 추출(34) 사이에 실행되어도 되고, 화상 취득(32)과 강조 화상 생성(33) 사이에 실행되어도 된다.
이하, 본 개시에 의한 작물 검출 시스템이 실행하는 다른 작물열 검출 방법의 실시 형태를 설명한다.
도 21은 상면시 화상의 일부 또는 전부를 복수의 블록으로 분할하고, 복수의 블록의 각각에 대해서, 에지 라인의 위치를 결정하는 방법을 설명하기 위한 도면이다.
본 실시 형태에 있어서, 처리 장치(122)는 상면시 화상(44)의 일부 또는 전부를 복수의 블록으로 분할한다. 그리고, 복수의 블록의 각각에 대해서, 작물열(12)의 에지 라인 E의 위치를 결정한다. 도시되는 예에 있어서, 3개의 블록 B1, B2, B3이, 상면시 화상 내에 있어서, 화상 수평 방향으로 연속되는 띠 형상을 갖고 있다. 처리 장치(122)는 농업 기계(100)의 진행 방향과는 다른 방향의 띠 형상에 기초하여, 작물열의 에지 라인을 결정할 수 있다.
도 22는 도 21의 상면시 화상의 블록 B1, B2, B3의 각각에 있어서의, 주사 라인 S의 위치와 지표값의 적산값의 관계(적산값 히스토그램)를 모식적으로 도시하는 도면이다. 적산을 행할 때의 주사 라인 S는, 항상 화상 수직 방향에 평행하다. 지표값의 적산은 블록 단위로 행해지고, 주사 라인 S의 방향(각도)을 바꿀 필요는 없다. 주사 라인 S의 길이를 단축함으로써, 작물열(12)이 비스듬히 연장되어 있어도, 중간 영역(작업 통로)(14)에 기인하는 제2 화소(배경 화소)의 영역을 적절하게 검출하는 것이 가능해진다. 이 때문에, 주사 라인 S의 각도를 변화시킬 필요가 없어진다.
도 22에 있어서의 화살표 W의 양단은, 블록 B1, B2, B3의 각각에서 결정된, 작물열의 에지 라인의 위치를 도시하고 있다. 도 21에 도시되는 예에 있어서, 작물열(12)의 방향은 주사 라인 S의 방향에 대하여 경사져 있다. 이 때문에, 전술한 바와 같이, 적산값 히스토그램의 피크값을 기준으로 0.8배의 값을 나타내는 주사 라인 위치를, 작물열(12)의 에지 라인 E의 위치로서 채용하는 경우, 그러한 에지 라인 E의 위치란, 블록 B1, B2, B3의 각각에 있어서의 작물열(12)의 중앙 부근을 통과하는 「폭」의 양단에 상당한다.
도 23은 도 22의 블록 B1, B2, B3의 각각에 있어서의 작물열 중심 Wc를 도시하고 있다. 작물열 중심 Wc는, 도 22의 적산값 히스토그램으로부터 구한 작물열의 에지 라인을 규정하는 화살표 W의 중심으로부터 구해지고, 각 블록의 화상 수직 방향에 있어서의 중앙에 위치하고 있다. 도 23에는 동일한 작물열(12)에 속하는 작물열 중심 Wc에 대한 근사선(12C)의 예가 도시된다. 근사선(12C)은, 예를 들어 각 작물열(12)의 복수의 작물열 중심 Wc로부터 거리(오차)의 제곱 평균이 최소가 되도록 구해진 직선이다. 이러한 근사선(12C)은 작물열(12)의 중앙을 통과하는 라인에 상당한다.
도 24는 도 23의 근사선(12C)으로부터 결정한 작물열(12)의 에지 라인 E의 예를 도시하는 상면도이다. 이 예에 있어서, 각 작물열(12)에 대응지어지는 2개의 에지 라인 E는, 그 간격이 화살표 W의 길이와 동등하고, 근사선(12C)으로부터 등거리의 위치에 있다.
본 실시 형태에 따르면, 주사 라인의 방향(각도)을 변화시킬 필요가 없고, 보다 적은 연산량으로 작물열(12)의 에지 라인 E를 구할 수 있다. 또한, 각 블록의 화상 수직 방향에 있어서의 길이는, 예를 들어 지면에 있어서의 1 내지 2미터의 거리에 상당하도록 설정될 수 있다. 본 실시 형태에서는, 하나의 화상을 3개의 블록으로 분할하여 적산값 히스토그램을 구했지만, 블록의 개수는 4개 이상이어도 된다. 또한, 블록의 형상도 상기의 예에 한정되지는 않는다. 블록은 상면시 화상 내에 있어서, 화상 수평 방향 또는 화상 수직 방향 중 어느 방향으로 연속되는 띠 형상을 가질 수 있다. 처리 장치(122)는 농업 기계(100)의 진행 방향과는 다른 방향으로 연장되는 띠 형상의 블록으로 분할하는 것, 작물열의 에지 라인을 결정하는 것이 가능하다.
도 25는 상면시 화상(44)의 작물열(12)이 곡선 상으로 구부러지는 부분을 포함하는 모습을 모식적으로 도시하고 있다. 도 26은 도 25의 상면시 화상(44)의 블록 B1, B2, B3의 각각에 있어서의 적산값 히스토그램을 모식적으로 도시하고 있다.
도 27은 도 26의 블록 B1, B2, B3의 각각에 있어서의 작물열 중심 Wc와, 각 작물열 중심 Xc에 대한 근사선(12C)의 예를 도시하는 도면이다. 이 예에 있어서의 근사선(12C)은, 예를 들어 각 작물열(12)의 작물열 중심 Wc로부터의 거리(오차)의 제곱 평균이 최소가 되도록 구해진 곡선(예를 들어 3차 곡선 등의 고차의 곡선)이다. 이러한 근사선(12C)은 곡선 부분을 갖는 작물열(12)의 중앙을 통과하는 만곡한 라인에 상당한다.
도 28은 도 27의 근사선으로부터 결정한 작물열(12)의 에지 라인 E의 예를 도시하는 상면도이다. 에지 라인 E는, 도 24를 참조하여 설명한 방법과 마찬가지의 방법으로 생성된다. 즉, 각 작물열(12)에 대응지어지는 2개의 에지 라인 E는, 그 간격이 화살표 W의 길이와 동등하고, 근사선(12C)으로부터 등거리의 위치에 있다.
이상, 설명해 온 바와 같이, 상면시 화상을 복수의 블록으로 분할하여, 각각의 블록에서 적산값의 히스토그램을 생성하면, 작물열의 방향을 구하는 것이 용이해지고, 또한 작물열의 방향이 도중에 변화되어 있어도, 그 변화된 방향을 아는 것이 가능해진다.
상기의 작물열 검출 방법은, 모두, 컴퓨터에 실장되고, 컴퓨터에 원하는 동작을 실행시킴으로써 실시될 수 있다.
(실시 형태 2)
다음으로, 본 개시의 작물열 검출 시스템을 구비하는 농업 기계의 실시 형태를 설명한다.
본 실시 형태에 있어서의 농업 기계는, 전술한 작물열 검출 시스템을 구비한다. 또한, 이 농업 기계는 자동 조타 운전을 실현하기 위한 제어를 행하는 제어 시스템을 구비한다. 제어 시스템은 기억 장치와, 제어 장치를 구비하는 컴퓨터 시스템이고, 농업 기계의 조타, 주행, 그 밖의 동작을 제어하도록 구성되어 있다.
제어 장치는, 통상의 자동 조타 동작 모드에서, 측위 장치에 의해 농업 기계의 위치를 특정하고, 미리 생성된 목표 경로에 기초하여, 농업 기계가 목표 경로를 따라서 주행하도록 농업 기계의 조타를 제어한다. 구체적으로는, 작업 차량이 포장 내를 목표 경로를 따라서 주행하도록 농업 기계의 조타륜(예를 들어 전륜)의 조타각을 제어한다. 본 실시 형태에 있어서의 농업 기계는, 이러한 통상의 자동 조타 모드뿐만 아니라, 작물열이 마련된 포장 내에서 「열 모방 주행 제어」에 의한 자동 주행을 행하도록 구성된 자동 조타 장치를 구비한다.
측위 장치는, 예를 들어 GNSS 수신기를 갖는다. 이러한 측위 장치는, GNSS 위성으로부터의 신호에 기초하여, 작업 차량의 위치를 특정할 수 있다. 그러나, 작물열이 포장에 있는 경우, 가령 측위 장치가 농업 기계의 위치를 고정밀도로 측정할 수 있었다고 해도, 작물열의 사이는 좁고, 작물의 심어지는 방법이나 생육 상황에 따라서는, 농업 기계의 차륜 등의 주행 장치가 작물열로 비어져 나올 가능성도 높아진다. 그러나, 본 실시 형태에서는, 전술한 작물열 검출 시스템을 사용함으로써, 현실에 존재하는 작물열을 검출하여, 적절한 자동 조타를 실행할 수 있다. 즉, 본 개시의 실시 형태에 있어서의 농업 기계가 구비하는 자동 조타 장치는, 작물열 검출 시스템이 결정한 작물열의 에지 라인의 위치에 기초하여, 조타륜의 조타각을 제어하도록 구성된다.
또한, 본 실시 형태에 있어서의 농업 기계에서는 작물열 검출 시스템의 처리 장치가, 시계열 컬러 화상에 기초하여, 작물열의 에지 라인과 조타륜의 위치 관계를 모니터하는 것이 가능하다. 이 위치 관계로부터 위치 오차 신호를 생성하면, 농업 기계의 자동 조타 장치가 위치 오차 신호를 작게 하도록 조타각을 적절하게 조정하는 것이 가능해진다.
도 29는 본 실시 형태에 있어서의 농업 기계(100)의 외관예를 도시하는 사시도이다. 도 30은 작업기(300)가 장착된 상태의 농업 기계(100)의 예를 모식적으로 도시하는 측면도이다. 본 실시 형태에 있어서의 농업 기계(100)는 작업기(300)가 장착된 상태의 농업용 트랙터(작업 차량)이다. 농업 기계(100)는 트랙터에 한정되지 않고, 또한 작업기(300)가 장착되어 있을 필요도 없다. 본 개시에 있어서의 작물열 검출의 기술은, 예를 들어 두둑짓기, 중경, 리징, 제초, 추비, 방제 등의 고랑 작업에 사용될 수 있는 소형 관리기, 및 야채 이식기에 사용하여 우수한 효과를 발휘할 수 있다.
본 실시 형태에 있어서의 농업 기계(100)는 촬상 장치(120)와, 측위 장치(130)와, 장해물 센서(136)를 구비한다. 도 29에는 하나의 장해물 센서(136)가 예시되어 있지만, 장해물 센서(136)는 농업 기계(100)의 복수의 개소에 마련되어 있어도 된다.
도 30에 도시하는 바와 같이, 농업 기계(100)는 차량 본체(110)와, 원동기(엔진)(102)와, 변속 장치(트랜스미션)(103)를 구비한다. 차량 본체(110)에는 타이어(104)(차륜)와, 캐빈(105)이 마련되어 있다. 타이어(104)는 한 쌍의 전륜(104F)과 한 쌍의 후륜(104R)을 포함한다. 캐빈(105)의 내부에 운전석(107), 조타 장치(106), 조작 단말기(200) 및 조작을 위한 스위치군이 마련되어 있다. 전륜(104F) 및 후륜(104R)의 한쪽은, 타이어가 아니라 크롤러여도 된다. 농업 기계(100)는 4개의 타이어(104)를 구동륜으로서 구비하는 사륜 구동차여도 되고, 한 쌍의 전륜(104F) 또는 한 쌍의 후륜(104R)을 구동륜으로서 구비하는 이륜 구동차여도 된다.
본 실시 형태에 있어서의 측위 장치(130)는 GNSS 수신기를 구비한다. GNSS 수신기는 GNSS 위성으로부터의 신호를 수신하는 안테나와, 안테나가 수신한 신호에 기초하여 농업 기계(100)의 위치를 결정하는 처리 회로를 구비한다. 측위 장치(130)는 GNSS 위성으로부터 송신되는 GNSS 신호를 수신하고, GNSS 신호에 기초하여 측위를 행한다. GNSS는 GPS(Global Positioning System), QZSS(Quasi-Zenith Satellite System, 예를 들어 미치비키), GLONASS, Galileo, 및 BeiDou 등의 위성 측위 시스템의 총칭이다. 본 실시 형태에 있어서의 측위 장치(130)는 캐빈(105)의 상부에 마련되어 있지만, 다른 위치에 마련되어 있어도 된다.
측위 장치(130)는, 또한 관성 계측 장치(IMU)로부터의 신호를 이용하여 위치 데이터를 보완할 수 있다. IMU는 농업 기계(100)의 기울기 및 미소한 움직임을 계측할 수 있다. IMU에 의해 취득된 데이터를 사용하여, GNSS 신호에 기초하는 위치 데이터를 보완함으로써, 측위의 성능을 향상시킬 수 있다.
도 29 및 도 30에 도시하는 예에서는, 차량 본체(110)의 후방부에 장해물 센서(136)가 마련되어 있다. 장해물 센서(136)는 차량 본체(110)의 후방부 이외의 부위에도 배치될 수 있다. 예를 들어, 차량 본체(110)의 측부, 전방부, 및 캐빈(105) 중 어느 것의 개소에, 하나 또는 복수의 장해물 센서(136)가 마련될 수 있다. 장해물 센서(136)는 농업 기계(100)의 주위에 존재하는 물체를 검출한다. 장해물 센서(136)는, 예를 들어 레이저 스캐너 또는 초음파 음파 탐지기를 구비할 수 있다. 장해물 센서(136)는 장해물 센서(136)로부터 소정의 거리보다도 가까이에 물체가 존재하는 경우에, 장해물이 존재하는 것을 나타내는 신호를 출력한다. 복수의 장해물 센서(136)가 농업 기계(100)의 차체의 다른 위치에 마련되어 있어도 된다. 예를 들어, 복수의 레이저 스캐너와, 복수의 초음파 음파 탐지기가, 차체의 다른 위치에 배치되어 있어도 된다. 그러한 많은 장해물 센서(136)를 구비함으로써, 농업 기계(100)의 주위의 장해물 감시에 있어서의 사각을 줄일 수 있다.
원동기(102)는, 예를 들어 디젤 엔진이다. 디젤 엔진 대신에 전동 모터가 사용되어도 된다. 변속 장치(103)는 변속에 의해 농업 기계(100)의 추진력 및 이동 속도를 변화시킬 수 있다. 변속 장치(103)는 농업 기계(100)의 전진과 후진을 전환할 수도 있다.
조타 장치(106)는 스티어링 휠과, 스티어링 휠에 접속된 스티어링 샤프트와, 스티어링 휠에 의한 조타를 보조하는 파워 스티어링 장치를 포함한다. 전륜(104F)는 조타륜이고, 그 꺾임각(「조타각」이라고도 칭함)을 변화시킴으로써, 농업 기계(100)의 주행 방향을 변화시킬 수 있다. 전륜(104F)의 조타각은 스티어링 휠을 조작함으로써 변화시킬 수 있다. 파워 스티어링 장치는 전륜(104F)의 조타각을 변화시키기 위한 보조력을 공급하는 유압 장치 또는 전동 모터를 포함한다. 자동 조타가 행해질 때에는, 농업 기계(100) 내에 배치된 제어 장치로부터의 제어에 의해, 유압 장치 또는 전동 모터의 힘에 의해 조타각이 자동으로 조정된다.
차량 본체(110)의 후방부에는 연결 장치(108)가 마련되어 있다. 연결 장치(108)는, 예를 들어 3점 지지 장치(「3점 링크」 또는 「3점 히치」라고도 칭함), PTO(Power Take Off)축, 유니버설 조인트, 및 통신 케이블을 포함한다. 연결 장치(108)에 의해 작업기(300)를 농업 기계(100)에 착탈할 수 있다. 연결 장치(108)는, 예를 들어 유압 장치에 의해 3점 링크를 승강시키고, 작업기(300)의 위치 또는 자세를 제어할 수 있다. 또한, 유니버설 조인트를 통해 농업 기계(100)로부터 작업기(300)에 동력을 보낼 수 있다. 농업 기계(100)는 작업기(300)를 당기면서, 작업기(300)에 소정의 작업을 실행시킬 수 있다. 연결 장치는 차량 본체(110)의 전방에 마련되어 있어도 된다. 그 경우, 농업 기계(100)의 전방에 작업기를 접속할 수 있다.
도 30에 도시하는 작업기(300)는, 예를 들어 로터리 컬티이다. 작물열을 주행할 때에 트랙터 등의 작업 차량에 견인 또는 장착되는 작업기(300)는 두둑짓기, 중경, 리징, 제초, 추비, 방제 등의 고랑 작업에 사용될 수 있는 것이면, 임의이다.
도 31은 농업 기계(100) 및 작업기(300)의 개략적인 구성의 예를 도시하는 블록도이다. 농업 기계(100)와 작업기(300)는 연결 장치(108)에 포함되는 통신 케이블을 통해 서로 통신할 수 있다.
도 31의 예에 있어서의 농업 기계(100)는 촬상 장치(120), 측위 장치(130), 장해물 센서(136), 조작 단말기(200) 외에도, 구동 장치(140), 스티어링 휠 센서(150), 꺾임각 센서(152), 제어 시스템(160), 통신 인터페이스(IF)(190), 조작 스위치군(210) 및 버저(220)를 구비한다. 측위 장치(130)는 GNSS 수신기(131)와, 관성 계측 장치(IMU)(125)를 구비한다. 제어 시스템(160)은 기억 장치(170)와, 제어 장치(180)를 구비한다. 제어 장치(180)는, 복수의 전자 제어 유닛(ECU)(181 내지 186)을 구비한다. 작업기(300)는 구동 장치(340)와, 제어 장치(380)와, 통신 인터페이스(IF)(390)를 구비한다. 또한, 도 31에는 농업 기계(100)에 의한 자동 조타 또는 자동 주행의 동작과의 관련성이 상대적으로 높은 구성 요소가 도시되어 있고, 그 이외의 구성 요소의 도시는 생략되어 있다.
측위 장치(130)는 GNSS를 이용하여 농업 기계(100)의 측위를 행한다. 측위 장치(130)가 RTK 수신기를 구비하는 경우, 복수의 GNSS 위성으로부터 송신되는 GNSS 신호 외에도, 기준국으로부터 송신되는 보정 신호가 이용된다. 기준국은 농업 기계(100)가 주행하는 포장의 주위(예를 들어, 농업 기계(100)로부터 10km 이내의 위치)에 설치될 수 있다. 기준국은, 복수의 GNSS 위성으로부터 수신한 GNSS 신호에 기초하여 보정 신호를 생성하고, 측위 장치(130)에 송신한다. 측위 장치(130)에 있어서의 GNSS 수신기(131)는, 복수의 GNSS 위성으로부터 송신되는 GNSS 신호를 수신한다. 측위 장치(130)는 GNSS 신호 및 보정 신호에 기초하여, 농업 기계(100)의 위치를 계산함으로써, 측위를 행한다. RTK-GNSS를 사용함으로써, 예를 들어 오차 수cm의 정밀도로 측위를 행하는 것이 가능하다. 위도, 경도 및 고도의 정보를 포함하는 위치 정보가, RTK-GNSS에 의한 고정밀도의 측위에 의해 취득된다. 또한, 측위 방법은 RTK-GNSS에 한정되지 않고, 필요한 정밀도의 위치 정보가 얻어지는 임의의 측위 방법(간섭 측위법 또는 상대 측위법 등)을 사용할 수 있다. 예를 들어, VRS(Virtual Reference Station) 또는 DGPS(Differential Global Positioning System)를 이용한 측위를 행해도 된다.
IMU(135)는 3축 가속도 센서 및 3축 자이로스코프를 구비한다. IMU(135)는 3축 지자기 센서 등의 방위 센서를 구비하고 있어도 된다. IMU(135)는 모션 센서로서 기능하고, 농업 기계(100)의 가속도, 속도, 변위 및 자세 등의 제량을 나타내는 신호를 출력할 수 있다. 측위 장치(130)는 GNSS 신호 및 보정 신호 외에도, IMU(135)로부터 출력된 신호에 기초하여, 농업 기계(100)의 위치 및 방향을 보다 고정밀도로 추정할 수 있다. IMU(135)로부터 출력된 신호는 GNSS 신호 및 보정 신호에 기초하여 계산되는 위치의 보정 또는 보완에 사용될 수 있다. IMU(135)는 GNSS 신호보다도 높은 빈도로 신호를 출력한다. 그 고빈도의 신호를 이용하여, 농업 기계(100)의 위치 및 방향을 보다 높은 빈도(예를 들어, 10Hz 이상)로 계측할 수 있다. IMU(135)를 대신하여, 3축 가속도 센서 및 3축 자이로스코프를 별도로 마련해도 된다. IMU(135)는 측위 장치(130)와는 별도의 장치로서 마련되어 있어도 된다.
측위 장치(130)는 GNSS 수신기(131) 및 IMU(135) 외에도, 다른 종류의 센서를 구비하고 있어도 된다. 농업 기계(100)가 주행하는 환경에 따라서는, 이들 센서로부터의 데이터에 기초하여 농업 기계(100)의 위치 및 방향을 고정밀도로 추정할 수 있다.
이러한 측위 장치(130)를 이용함으로써, 전술한 작물열 검출 시스템(1000)에 의해 검출한 작물열의 지도를 제작하는 것도 가능하다.
구동 장치(140)는, 예를 들어 전술한 원동기(102), 변속 장치(103), 디퍼렌셜 로크 기구를 포함하는 차동 장치, 조타 장치(106), 및 연결 장치(108) 등의, 농업 기계(100)의 주행 및 작업기(300)의 구동에 필요한 각종 장치를 포함한다. 원동기(102)는, 예를 들어 디젤 기관 등의 내연 기관을 구비한다. 구동 장치(140)는 내연 기관 대신에, 혹은 내연 기관과 함께, 트랙션용의 전동 모터를 구비하고 있어도 된다.
스티어링 휠 센서(150)는 농업 기계(100)의 스티어링 휠의 회전각을 계측한다. 꺾임각 센서(152)는 조타륜인 전륜(104F)의 꺾임각을 계측한다. 스티어링 휠 센서(150) 및 꺾임각 센서(152)에 의한 계측값은, 제어 장치(180)에 의한 조타 제어에 이용된다.
기억 장치(170)는 플래시 메모리 또는 자기 디스크 등의 하나 이상의 기억 매체를 포함한다. 기억 장치(170)는, 각 센서 및 제어 장치(180)가 생성하는 각종 데이터를 기억한다. 기억 장치(170)가 기억하는 데이터에는 농업 기계(100)가 주행하는 환경 내의 지도 데이터 및 자동 조타의 목표 경로의 데이터가 포함될 수 있다. 기억 장치(170)는 제어 장치(180)에 있어서의 각 ECU에, 후술하는 각종 동작을 실행시키는 컴퓨터 프로그램도 기억한다. 그러한 컴퓨터 프로그램은 기억 매체(예를 들어 반도체 메모리 또는 광디스크 등) 또는 전기 통신 회선(예를 들어 인터넷)을 통해 농업 기계(100)에 제공될 수 있다. 그러한 컴퓨터 프로그램이, 상용 소프트웨어로서 판매되어도 된다.
제어 장치(180)는, 복수의 ECU를 포함한다. 복수의 ECU는 화상 인식용의 ECU(181), 속도 제어용의 ECU(182), 스티어링 제어용의 ECU(183), 자동 조타 제어용의 ECU(184), 작업기 제어용의 ECU(185), 표시 제어용의 ECU(186), 및 버저 제어용의 ECU(187)를 포함한다. 화상 인식용의 ECU(181)는 작물열 검출 시스템의 처리 장치로서 기능한다. ECU(182)는 구동 장치(140)에 포함되는 원동기(102), 변속 장치(103) 및 브레이크를 제어함으로써, 농업 기계(100)의 속도를 제어한다. ECU(183)는 스티어링 휠 센서(150)의 계측값에 기초하여, 조타 장치(106)에 포함되는 유압 장치 또는 전동 모터를 제어함으로써, 농업 기계(100)의 스티어링을 제어한다. ECU(184)는 측위 장치(130), 스티어링 휠 센서(150) 및 꺾임각 센서(152)로부터 출력되는 신호에 기초하여, 자동 조타 운전을 실현하기 위한 연산 및 제어를 행한다. 자동 조타 운전 중, ECU(184)는 ECU(183)에 조타각의 변경의 지령을 보낸다. ECU(183)는, 당해 지령에 응답하여 조타 장치(106)를 제어함으로써 조타각을 변화시킨다. ECU(185)는 작업기(300)에 원하는 동작을 실행시키기 위해, 연결 장치(108)의 동작을 제어한다. ECU(185)는 또한, 작업기(300)의 동작을 제어하는 신호를 생성하고, 그 신호를 통신 IF(190)로부터 작업기(300)에 송신한다. ECU(186)는 조작 단말기(200)의 표시를 제어한다. ECU(186)는, 예를 들어 조작 단말기(200)에 있어서의 표시 장치에, 포장의 맵, 검출된 작물열, 맵 중의 농업 기계(100)의 위치 및 목표 경로, 팝업 통지, 설정 화면 등의 다양한 표시를 실현시킨다. ECU(187)는 버저(220)에 의한 경고음의 출력을 제어한다.
이들 ECU의 작용에 의해, 제어 장치(180)는 수동 조타 또는 자동 조타에 의한 운전을 실현한다. 통상의 자동 조타 운전 시에 있어서, 제어 장치(180)는 측위 장치(130)에 의해 계측 또는 추정된 농업 기계(100)의 위치와, 기억 장치(170)에 기억된 목표 경로에 기초하여, 구동 장치(140)를 제어한다. 이에 의해, 제어 장치(180)는 농업 기계(100)를 목표 경로를 따라서 주행시킨다. 한편, 작물열을 따라서 주행하는 열 모방 주행 제어 모드에서는, 화상 인식용의 ECU(181)가, 검출한 작물열로부터 작물열의 에지 라인을 결정하고, 이 에지 라인에 기초하는 목표 경로를 생성한다. 제어 장치(180)는 이 목표 경로에 따른 동작을 실행한다.
제어 장치(180)에 포함되는 복수의 ECU는, 예를 들어 CAN(Controller Area Network) 등의 비이클 버스 규격에 따라서, 서로 통신할 수 있다. 도 31에 있어서, ECU(181 내지 187)의 각각은, 개별의 블록으로서 도시되어 있지만, 이들 각각의 기능이, 복수의 ECU에 의해 실현되어 있어도 된다. 또한, ECU(181 내지 187)의 적어도 일부의 기능을 통합한 차량 탑재 컴퓨터가 마련되어 있어도 된다. 제어 장치(180)는 ECU(181 내지 187) 이외의 ECU를 구비하고 있어도 되고, 기능에 따라서 임의의 개수의 ECU가 마련될 수 있다. 각 ECU는, 하나 이상의 프로세서를 포함하는 제어 회로를 구비한다.
통신 IF(190)는 작업기(300)의 통신 IF(390)와 통신을 행하는 회로이다. 통신 IF(190)는, 예를 들어 ISOBUS-TIM 등의 ISOBUS 규격에 준거한 신호의 송수신을, 작업기(300)의 통신 IF(390)와의 사이에서 실행한다. 이에 의해, 작업기(300)에 원하는 동작을 실행시키거나, 작업기(300)로부터 정보를 취득하거나 할 수 있다. 통신 IF(190)는 유선 또는 무선의 네트워크를 통해 외부의 컴퓨터와 통신해도 된다. 외부의 컴퓨터는, 예를 들어 포장에 관한 정보를 클라우드 상에서 일원 관리하고, 클라우드 상의 데이터를 활용하여 농업을 지원하는 영농 지원 시스템에 있어서의 서버 컴퓨터여도 된다.
조작 단말기(200)는 농업 기계(100)의 주행 및 작업기(300)의 동작에 관한 조작을 유저가 실행하기 위한 단말기이고, 가상 단말기(VT)라고도 칭해진다. 조작 단말기(200)는 터치 스크린 등의 표시 장치, 및/또는 하나 이상의 버튼을 구비할 수 있다. 유저는 조작 단말기(200)를 조작함으로써, 예를 들어 자동 조타 모드의 온/오프 전환, 크루즈 컨트롤의 온/오프 전환, 농업 기계(100)의 초기 위치의 설정, 목표 경로의 설정, 지도의 기록 또는 편집, 2WD/4WD의 전환, 디퍼렌셜 로크의 온/오프 전환 및 작업기(300)의 온/오프 전환 등의 다양한 조작을 실행할 수 있다. 이들 조작의 적어도 일부는, 조작 스위치군(210)을 조작함으로써도 실현할 수 있다. 조작 단말기(200)로의 표시는 ECU(186)에 의해 제어된다.
버저(220)는 유저에게 이상을 통지하기 위한 경고음을 발하는 음성 출력 장치이다. 버저(220)는, 예를 들어 자동 조타 운전 시에, 농업 기계(100)가 목표 경로로부터 소정 거리 이상 일탈한 경우에 경고음을 발한다. 버저(220) 대신에, 조작 단말기(200)의 스피커에 의해 마찬가지의 기능이 실현되어도 된다. 버저(220)는 ECU(186)에 의해 제어된다.
작업기(300)에 있어서의 구동 장치(340)는 작업기(300)가 소정의 작업을 실행하기 위해 필요한 동작을 행한다. 구동 장치(340)는, 예를 들어 유압 장치, 전기 모터, 또는 펌프 등의, 작업기(300)의 용도에 따른 장치를 포함한다. 제어 장치(380)는 구동 장치(340)의 동작을 제어한다. 제어 장치(380)는 통신 IF(390)를 통해 농업 기계(100)로부터 송신된 신호에 응답하여, 구동 장치(340)에 각종 동작을 실행시킨다. 또한, 작업기(300)의 상태에 따른 신호를 통신 IF(390)로부터 농업 기계(100)에 송신할 수도 있다.
이상의 실시 형태에 있어서, 농업 기계(100)는 무인으로 자동 운전을 행하는 작업 차량이어도 된다. 그 경우에는, 캐빈, 운전석, 스티어링 휠, 조작 단말기 등의, 유인 운전에만 필요한 구성 요소는 농업 기계(100)에 마련되어 있지 않아도 된다. 무인 작업 차량은 자율 주행, 또는 유저에 의한 원격 조작에 의해, 전술한 각 실시 형태에 있어서의 동작과 마찬가지의 동작을 실행해도 된다.
실시 형태에 있어서의 각종의 기능을 제공하는 시스템을, 그러한 기능을 갖지 않는 농업 기계에 나중에 설치할 수도 있다. 그러한 시스템은, 농업 기계와는 독립적으로 제조 및 판매될 수 있다. 그러한 시스템에서 사용되는 컴퓨터 프로그램도, 농업 기계와는 독립적으로 제조 및 판매될 수 있다. 컴퓨터 프로그램은, 예를 들어 컴퓨터가 판독 가능한 비일시적인 기억 매체에 저장되어 제공될 수 있다. 컴퓨터 프로그램은 전기 통신 회선(예를 들어 인터넷)을 통한 다운로드에 의해서도 제공될 수 있다.
본 개시의 기술은, 예를 들어 승용 관리기, 야채 이식기, 트랙터 등의 농업 기계에 적용할 수 있다.
10: 지면
12: 작물열
14: 중간 영역(작업 통로)
40: 화상
42: 강조 화상
44: 상면시 화상
100: 농업 기계
110: 차량 본체
120: 촬상 장치
122: 처리 장치
124: 자동 조타 장치
12: 작물열
14: 중간 영역(작업 통로)
40: 화상
42: 강조 화상
44: 상면시 화상
100: 농업 기계
110: 차량 본체
120: 촬상 장치
122: 처리 장치
124: 자동 조타 장치
Claims (12)
- 농업 기계에 설치되고, 상기 농업 기계가 주행하는 지면을 촬영하여 상기 지면의 적어도 일부를 포함하는 시계열 컬러 화상을 취득하는 촬상 장치와,
상기 시계열 컬러 화상의 화상 처리를 행하는 처리 장치
를 구비하고,
상기 처리 장치는,
상기 시계열 컬러 화상으로부터, 검출 대상인 작물열의 색을 강조한 강조 화상을 생성하고,
상기 강조 화상으로부터, 상기 작물열의 색의 지표값이 역치 이상의 제1 화소와, 상기 지표값이 상기 역치 미만의 제2 화소로 분류된, 상기 지면의 상방에서 본 상면시 화상을 생성하고,
상기 제1 화소의 상기 지표값에 기초하여, 상기 작물열의 에지 라인의 위치를 결정하는,
작물열 검출 시스템. - 제1항에 있어서,
상기 처리 장치는,
상기 상면시 화상의 복수의 주사 라인을 따라서 상기 제1 화소의 상기 지표값을 적산하여 적산값을 구하고, 상기 주사 라인의 위치와 상기 적산값을 관련지은 히스토그램을 작성하고,
상기 히스토그램에 기초하여, 상기 작물열의 에지 라인의 위치를 결정하는, 작물열 검출 시스템. - 제2항에 있어서,
상기 처리 장치는,
상기 히스토그램을 참조하고, 상기 적산값의 피크의 양측의 소정 위치로부터, 상기 작물열의 에지 라인의 위치를 결정하는, 작물열 검출 시스템. - 제1항 내지 제3항 중 어느 한 항에 있어서,
상기 처리 장치는,
상기 상면시 화상의 일부 또는 전부를 복수의 블록으로 분할하여, 상기 복수의 블록의 각각에 대해서, 상기 에지 라인의 위치를 결정하는, 작물열 검출 시스템. - 제4항에 있어서,
상기 복수의 블록은, 상기 상면시 화상 내에 있어서, 화상 수평 방향 또는 상기 화상 수직 방향 중 어느 방향으로 연속되는 띠 형상을 갖고,
상기 처리 장치는, 상기 농업 기계의 진행 방향과는 다른 방향의 띠 형상에 기초하여, 상기 작물열의 에지 라인을 결정하는 작물열 검출 시스템. - 제4항 또는 제5항에 있어서,
상기 처리 장치는, 상기 복수의 블록의 각각에 있어서의 상기 에지 라인의 위치에 기초하여, 상기 작물열이 연장되는 방향을 결정하는, 작물열 검출 시스템. - 제1항 내지 제6항 중 어느 한 항에 있어서,
상기 상면시 화상은, 상기 지면을 따른 기준 평면을, 상기 기준 평면의 법선 방향에 있어서의 바로 위에서 본 부감 화상이고,
상기 처리 장치는, 상기 시계열 컬러 화상 또는 상기 시계열 컬러 화상의 전처리 화상으로부터, 호모그래피 변환에 의해 상기 부감 화상을 생성하는, 작물열 검출 시스템. - 제7항에 있어서,
상기 기준 평면은, 상기 작물이 식부되는 지면의 요철에 따라서 설정된 소정의 거리만큼, 상기 지면에 있어서의 상기 요철의 저부로부터 상방으로 변위되어 있는, 작물열 검출 시스템. - 제1항 내지 제8항 중 어느 한 항에 있어서,
상기 처리 장치는, 상기 작물열의 상기 에지 라인의 위치에 기초하여, 목표 경로를 생성하여 출력하는, 작물열 검출 시스템. - 제1항 내지 제9항 중 어느 한 항에 기재되는 작물열 검출 시스템을 구비하는 농업 기계이며,
조타륜을 포함하는 주행 장치와,
상기 작물열 검출 시스템이 결정한 상기 작물열의 상기 에지 라인의 위치에 기초하여, 상기 조타륜의 조타각을 제어하는 자동 조타 장치
를 구비하는, 농업 기계. - 제10항에 있어서,
상기 작물열 검출 시스템의 상기 처리 장치는, 상기 시계열 컬러 화상에 기초하여, 상기 작물열의 상기 에지 라인과 상기 조타륜의 위치 관계를 모니터하고, 위치 오차 신호를 상기 자동 조타 장치에 부여하는, 농업 기계. - 컴퓨터에 실장되는 작물열 검출 방법이며,
농업 기계에 설치된 촬상 장치로부터, 상기 농업 기계가 주행하는 지면을 촬영한, 상기 지면의 적어도 일부를 포함하는 시계열 컬러 화상을 취득하는 것,
상기 시계열 컬러 화상으로부터, 검출 대상인 작물열의 색을 강조한 강조 화상을 생성하는 것,
상기 강조 화상으로부터, 상기 작물열의 색의 지표값이 역치 이상의 제1 화소와, 상기 지표값이 상기 역치 미만의 제2 화소로 분류된, 상기 지면의 상방에서 본 상면시 화상을 생성하는 것,
상기 제1 화소의 상기 지표값에 기초하여, 상기 작물열의 에지 라인의 위치를 결정하는 것
을 컴퓨터에 실행시키는, 작물열 검출 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JPJP-P-2021-107919 | 2021-06-29 | ||
| JP2021107919 | 2021-06-29 | ||
| PCT/JP2022/004547 WO2023276226A1 (ja) | 2021-06-29 | 2022-02-04 | 作物列検出システム、作物列検出システムを備える農業機械、および、作物列検出方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20240007667A true KR20240007667A (ko) | 2024-01-16 |
Family
ID=84692236
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020237042729A KR20240007667A (ko) | 2021-06-29 | 2022-02-04 | 작물열 검출 시스템, 작물열 검출 시스템을 구비하는 농업 기계, 및 작물열 검출 방법 |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP4335265A1 (ko) |
| JP (1) | JPWO2023276226A1 (ko) |
| KR (1) | KR20240007667A (ko) |
| WO (1) | WO2023276226A1 (ko) |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016208871A (ja) | 2015-04-30 | 2016-12-15 | 国立大学法人 鹿児島大学 | 作業機及びその制御方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2907641B2 (ja) * | 1992-06-30 | 1999-06-21 | 株式会社クボタ | 作業領域検出装置 |
| JPH09201110A (ja) * | 1996-01-26 | 1997-08-05 | Kubota Corp | 作業車の方向検出装置、走行状態表示装置、及び走行制御装置 |
| JPH09224417A (ja) * | 1996-02-27 | 1997-09-02 | Kubota Corp | 作業車の補助装置 |
| JP2006101816A (ja) * | 2004-10-08 | 2006-04-20 | Univ Of Tokyo | 操向制御方法及び装置 |
| US7684916B2 (en) * | 2005-07-01 | 2010-03-23 | Deere & Company | Method and system for vehicular guidance using a crop image |
-
2022
- 2022-02-04 KR KR1020237042729A patent/KR20240007667A/ko unknown
- 2022-02-04 JP JP2023531366A patent/JPWO2023276226A1/ja active Pending
- 2022-02-04 EP EP22832394.5A patent/EP4335265A1/en active Pending
- 2022-02-04 WO PCT/JP2022/004547 patent/WO2023276226A1/ja active Application Filing
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016208871A (ja) | 2015-04-30 | 2016-12-15 | 国立大学法人 鹿児島大学 | 作業機及びその制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4335265A1 (en) | 2024-03-13 |
| JPWO2023276226A1 (ko) | 2023-01-05 |
| WO2023276226A1 (ja) | 2023-01-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8855405B2 (en) | System and method for detecting and analyzing features in an agricultural field for vehicle guidance | |
| US8712144B2 (en) | System and method for detecting crop rows in an agricultural field | |
| US8737720B2 (en) | System and method for detecting and analyzing features in an agricultural field | |
| EP1738630B1 (en) | Method and system for vehicular guidance with respect to harvested crop | |
| US7792622B2 (en) | Method and system for vehicular guidance using a crop image | |
| US7570783B2 (en) | Method and system for vehicular guidance using a crop image | |
| US7580549B2 (en) | Method and system for vehicular guidance using a crop image | |
| US11568563B2 (en) | Pose estimation and applications using computer imaging | |
| JP2006101816A (ja) | 操向制御方法及び装置 | |
| US20230230202A1 (en) | Agricultural mapping and related systems and methods | |
| WO2023276226A1 (ja) | 作物列検出システム、作物列検出システムを備える農業機械、および、作物列検出方法 | |
| CN115451965B (zh) | 基于双目视觉的插秧机插植系统相对航向信息检测方法 | |
| WO2023276227A1 (ja) | 列検出システム、列検出システムを備える農業機械、および、列検出方法 | |
| WO2023276228A1 (ja) | 列検出システム、列検出システムを備える農業機械、および、列検出方法 | |
| WO2024095993A1 (ja) | 列検出システム、列検出システムを備える農業機械、および列検出方法 | |
| WO2023120182A1 (ja) | 農業機械 | |
| WO2023120183A1 (ja) | 農業機械 | |
| WO2023127437A1 (ja) | 農業機械 | |
| US20240130263A1 (en) | Row detection system, agricultural machine having a row detection system, and method of row detection | |
| WO2024095802A1 (ja) | 走行制御システム、作業車両および走行制御方法 | |
| WO2024004574A1 (ja) | 作業車両、制御方法およびコンピュータプログラム | |
| WO2023112515A1 (ja) | 地図生成システムおよび地図生成方法 | |
| WO2023243514A1 (ja) | 作業車両、および作業車両の制御方法 | |
| US20210185882A1 (en) | Use Of Aerial Imagery For Vehicle Path Guidance And Associated Devices, Systems, And Methods | |
| WO2024004575A1 (ja) | 作業車両、および作業車両の制御方法 |