KR20220030950A - 픽처 컴포넌트의 예측 방법, 인코더, 디코더 및 저장 매체 - Google Patents
픽처 컴포넌트의 예측 방법, 인코더, 디코더 및 저장 매체 Download PDFInfo
- Publication number
- KR20220030950A KR20220030950A KR1020217042910A KR20217042910A KR20220030950A KR 20220030950 A KR20220030950 A KR 20220030950A KR 1020217042910 A KR1020217042910 A KR 1020217042910A KR 20217042910 A KR20217042910 A KR 20217042910A KR 20220030950 A KR20220030950 A KR 20220030950A
- Authority
- KR
- South Korea
- Prior art keywords
- cclm
- parameter
- current block
- target
- group
- Prior art date
Links
Images















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/593—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving spatial prediction techniques
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/105—Selection of the reference unit for prediction within a chosen coding or prediction mode, e.g. adaptive choice of position and number of pixels used for prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/132—Sampling, masking or truncation of coding units, e.g. adaptive resampling, frame skipping, frame interpolation or high-frequency transform coefficient masking
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/157—Assigned coding mode, i.e. the coding mode being predefined or preselected to be further used for selection of another element or parameter
- H04N19/159—Prediction type, e.g. intra-frame, inter-frame or bidirectional frame prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/184—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being bits, e.g. of the compressed video stream
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/186—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being a colour or a chrominance component
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/70—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals characterised by syntax aspects related to video coding, e.g. related to compression standards
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/11—Selection of coding mode or of prediction mode among a plurality of spatial predictive coding modes
Abstract
본 출원의 실시예가 픽처 컴포넌트의 예측 방법, 인코더 ,디코더 및 저장 매체를 제공하는 바, 인코더는 현재 블록이 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정할 때, 현재 블록의 다중 그룹의 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정하며; 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터를 결정하고, 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정하고 또한 비트 스트림에 기록하며; 여기에서, CCLM 인덱스 값은 목표 CCLM 파라미터를 이용하는 것을 지시하며; 목표 CCLM 파라미터에 의하여 현재 블록의 인트라 예측 값을 결정한다. 디코더는 비트 스트림을 분석하여 현재 블록의 예측 모드 파라미터를 결정하며; 예측 모드 파라미터가 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 지시할 때, 비트 스트림을 분석하여 현재 블록의 CCLM 인덱스 값을 결정하며; CCLM 인덱스 값에 의하여 현재 블록의 목표 CCLM 파라미터를 결정하며; 목표 CCLM 파라미터에 의하여 현재 블록의 인트라 예측 값을 결정한다.
Description
본 출원의 실시예는 픽처 처리 기술 분야에 관한 것으로, 특히 픽처 컴포넌트의 예측 방법, 인코더, 디코더 및 저장 매체에 관한 것이다.
비디오 디스플레이 품질에 대한 요구가 높아짐에 따라 고화질과 초고화질 비디오 등 새로운 비디오 응용 형식이 생겨났다. H.265/고효율 비디오 인코딩(High Efficiency Video Coding,HEVC)은 비디오 응용이 급속히 발전에 대한 요구를 만족시킬 수 없고, 합동 비디오 연구 팀(Joint Video Exploration Team,JVET)은 차세대 비디오 인코딩 기준 H.266/다중 기능 비디오 인코딩(Versatile Video Coding,VVC)을 제시하며, 이의 상응한 테스트 모델이 VVC의 참조 소프트웨어 테스트 플랫폼(VVC Test Model,VTM)이다.
VVC에서, 크로스-컴포넌트 선형 모델 예측(Cross-component Linear Model Prediction,CCLM)모드를 통하여 휘도 값으로부터 채도 값 또는 채도 값 간으로의 예측을 구현할 수 있으며, 구체적으로 선형 회귀 방법을 이용하여 현재 블록에 대응되는 인접한 휘도 파라미터와 채도 파라미터에 대하여 선형 모델의 구성을 수행할 수 있어, 해당 선형 모델과 재구성 휘도값에 의하여 채도 예측 값을 계산할 수 있다. CCLM 모드를 이용하여 인트라 예측을 수행하는 과정에서, 현재 블록의 인접한 블록의 위치에 대하여 결정을 수행해야 하고, 인코딩/디코딩 처리의 복잡성을 크게 증가시키고 인코딩/디코딩 효율을 낮춘다.
본 출원의 실시예가 픽처 컴포넌트의 예측 방법, 인코더, 디코더 및 저장 매체를 제공하는 바, 인코딩/디코딩 처리의 복잡성을 크게 낮추고 인코딩/디코딩 효율을 향상시킨다.
본 출원의 실시예의 기술 방안은 다음과 같이 구현될 수 있다.
제1 방면으로, 본 출원의 실시예가 픽처 컴포넌트의 예측 방법을 제공하는 바, 인코더에 적용되며, 상기 방법에는,
현재 블록이 CCLM를 이용하여 상기 현재 블록의 인트라 예측 값을 결정할 때, 상기 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정하며; 여기에서, 상기 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며;
상기 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터를 결정하고, 상기 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정하고 비트 스트림에 기록하며; 여기에서, 상기 CCLM 인덱스 값은 상기 목표 CCLM 파라미터를 이용하는 것을 지시하며;
상기 목표 CCLM 파라미터에 의하여 상기 현재 블록의 인트라 예측 값을 결정하는 것이 포함된다.
제2 방면으로, 본 출원의 실시예가 픽처 컴포넌트의 예측 방법을 제공하는 바, 디코더에 적용되며, 상기 방법에는,
비트 스트림을 분석하여 상기 현재 블록의 예측 모드 파라미터를 결정하며;
상기 예측 모드 파라미터가 CCLM를 이용하여 상기 현재 블록의 인트라 예측 값을 결정하는 것을 지시할 때, 상기 비트 스트림을 분석하여 상기 현재 블록의 CCLM 인덱스 값을 결정하며;
상기 CCLM 인덱스 값에 의하여, 상기 현재 블록의 목표 CCLM 파라미터를 결정하며; 여기에서, 상기 목표 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며;
상기 목표 CCLM 파라미터에 의하여 상기 현재 블록의 인트라 예측 값을 결정하는 것이 포함된다.
제3 방면으로, 본 출원의 실시예가 인코더를 제공하는 바, 상기 인코더에는 제1 결정 부분 및 설정 부분이 포함되며,
상기 제1 결정 부분은, 현재 블록이 CCLM를 이용하여 상기 현재 블록의 인트라 예측 값을 결정할 때, 상기 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정하도록 구성되며; 여기에서, 상기 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며; 및 상기 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터를 결정하며;
상기 설정 부분은, 상기 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정하고 비트 스트림에 기록하도록 구성되며; 여기에서, 상기 CCLM 인덱스 값은 상기 목표 CCLM 파라미터를 이용하는 것을 지시하며;
상기 제1 결정 부분은, 또한 상기 목표 CCLM 파라미터에 의하여 상기 현재 블록의 인트라 예측 값을 결정하도록 구성되는 것이 포함된다.
제4 방면으로, 본 출원의 실시예가 인코더를 재공하는 바, 상기 인코더에는 제1 프로세서, 상기 제1 프로세서가 실행할 수 있는 명령을 저장하는 제1 기억장치가 포함되며, 상기 명령이 실행될 때, 상기 제1 프로세서가 실행할 때, 상술한 픽처 컴포넌트의 예측 방법을 구현한다.
제5 방면으로, 본 출원의 실시예가 디코더를 제공하는 바, 상기 디코더에는, 분석 부분 및 제2 결정 부분이 포함되며,
상기 분석 부분은, 비트 스트림을 분석하여 상기 현재 블록의 예측 모드 파라미터를 결정하며; 및 상기 예측 모드 파라미터가 CCLM를 이용하여 상기 현재 블록의 인트라 예측 값을 결정하는 것을 지시할 때, 상기 비트 스트림을 분석하여 상기 현재 블록의 CCLM 인덱스 값을 결정하도록 구성되며;
상기 제2 결정 부분은, 상기 CCLM 인덱스 값에 의하여, 상기 현재 블록의 목표 CCLM 파라미터를 결정하도록 구성되며; 여기에서, 상기 목표 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며; 및 상기 목표 CCLM 파라미터에 의하여 상기 현재 블록의 인트라 예측 값을 결정하도록 구성된다.
제6 방면으로, 본 출원의 실시예가 디코더를 재공하는 바, 상기 디코더에는 제2 프로세서, 상기 제2 프로세서가 실행할 수 있는 명령을 저장하는 제2 기억장치가 포함되며, 상기 명령이 실행될 때, 상기 제2 프로세서가 실행할 때, 상술한 픽처 컴포넌트의 예측 방법을 구현한다.
제7 방면으로, 본 출원의 실시예가 컴퓨터 저장 매체를 제공하는 바, 상기 컴퓨터 저장 매체에 컴퓨터 프로그램을 저장하고 있어, 상기 컴퓨터 프로그램은 제1 프로세서와 제2 프로세서에 의하여 실행될 때, 상술한 픽처 컴포넌트의 예측 방법을 구현한다.
본 출원의 실시예가 픽처 컴포넌트의 예측 방법, 인코더, 디코더 및 저장 매체를 제공하는 바, 인코더는 현재 블록이 CCLM를 사용하여 현재 블록의 인트라 예측 값을 결정할 때, 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정하며; 여기에서, CCLM 파라미터에 스케일 팩터와 오프셋 파라미터를 포함되며; 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터를 결정하며, 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정하고 비트 스트림에 기록하며; 여기에서, CCLM 인덱스 값은 목표 CCLM 파라미터를 이용하는 것을 지시하며; 목표 CCLM 파라미터에 의하여 현재 블록의 인트라 예측 값을 결정한다. 디코더가 비트 스트림을 분석하여 현재 블록의 예측 모드 파라미터를 결정하며; 예측 모드 파라미터가 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 지시할 때, 비트 스트림을 분석하여 현재 블록의 CCLM 인덱스 값을 결정하며; CCLM 인덱스 값에 의하여, 현재 블록의 목표 CCLM 파라미터를 결정하며; 여기에서, 목표 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며; 목표 CCLM 파라미터에 의하여 현재 블록의 인트라 예측 값을 결정한다. 이로부터 알 수 있는 바와 같이, 본 출원의 실시예에서, 인코더는 현재 블록이 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 결정할 때, 현재 블록과 인접한 포인트의 다중 그룹 참조점을 기반으로 대응되는 다중 그룹 CCLM 파라미터를 결정할 수 있고, 또한 다중 그룹 파라미터에서 최적화된 목표 CCLM 파라미터를 결정하며, 인코더가 목표 CCLM 파라미터를 이용한다고 지시하는 CCLM 인덱스 값을 비트 스트림에 기록하고 디코딩 측으로 전송할 수 있어 디코더가 비트 스트림을 분석한 후 CCLM 인덱스 값을 취득하고 또한 CCLM ?덱스 값이 지시한 목표 CCLM 파라미터를 결정하도록 할 수 있으며, 목표 CCLM 파라미터를 이용하여 현재 블록의 인트라 예측 값을 결정할 수 있다. 다시 말하면, 본 출원의 제시된 픽처 컴포넌트의 예측 방법은 현재 블록의 다중 그룹 CCLM 파라미터 중의 목표 CCLM 파라미터를 비트 스트림에 기록하여 전달할 수 있어, 인코더/디코더가 목표 CCLM 파라미터에 의하여 현재 블록에 대하여 인트라 예측 처리를 수행하는 것을 결정하게 할 수 있으며, 인코딩/디코딩 처리의 복잡성을 크게 낮추고 인코딩/디코딩 효율을 향상시킨다.
도1은 비디오 인코딩 시스템의 구조 도면이다.
도2는 비디오 디코딩 시스템의 구조 도면이다.
도3은 픽처 컴포넌트의 예측 방법의 구현 흐름 도면1이다.
도4는 픽처 컴포넌트의 예측 방법의 구현 흐름 도면2이다.
도5는 픽처 컴포넌트의 예측 방법의 구현 흐름 도면3이다.
도6은 픽처 컴포넌트의 예측 방법의 구현 흐름 도면4이다.
도7은 픽처 컴포넌트의 예측 방법의 구현 흐름 도면5이다.
도8은 현재 블록의 참조점의 위치의 도면1이다.
도9는 현재 블록의 참조점의 위치의 도면2이다.
도10은 현재 블록의 참조점의 위치의 도면3이다.
도11은 INTRA_T_CCLM 모드를 결정하는 참조점 위치의 도면이다.
도12는 픽처 컴포넌트의 예측 방법의 구현 흐름 도면6이다.
도13은 픽처 컴포넌트의 예측 방법의 구현 흐름 도면7이다.
도14는 픽처 컴포넌트의 예측 방법의 구현 흐름 도면8이다.
도15는 송신 장치의 구성 구조 도면이다.
도16은 목표 장치의 구성 구조 도면이다.
도17은 통신 시스템의 구성 구조 도면이다.
도18은 인코더의 구성 구조 도면1이다.
도19는 인코더의 구성 구조 도면2이다.
도20은 디코딩의 구성 구조 도면1이다.
도21은 디코더의 구성 구조 도면2이다.
도2는 비디오 디코딩 시스템의 구조 도면이다.
도3은 픽처 컴포넌트의 예측 방법의 구현 흐름 도면1이다.
도4는 픽처 컴포넌트의 예측 방법의 구현 흐름 도면2이다.
도5는 픽처 컴포넌트의 예측 방법의 구현 흐름 도면3이다.
도6은 픽처 컴포넌트의 예측 방법의 구현 흐름 도면4이다.
도7은 픽처 컴포넌트의 예측 방법의 구현 흐름 도면5이다.
도8은 현재 블록의 참조점의 위치의 도면1이다.
도9는 현재 블록의 참조점의 위치의 도면2이다.
도10은 현재 블록의 참조점의 위치의 도면3이다.
도11은 INTRA_T_CCLM 모드를 결정하는 참조점 위치의 도면이다.
도12는 픽처 컴포넌트의 예측 방법의 구현 흐름 도면6이다.
도13은 픽처 컴포넌트의 예측 방법의 구현 흐름 도면7이다.
도14는 픽처 컴포넌트의 예측 방법의 구현 흐름 도면8이다.
도15는 송신 장치의 구성 구조 도면이다.
도16은 목표 장치의 구성 구조 도면이다.
도17은 통신 시스템의 구성 구조 도면이다.
도18은 인코더의 구성 구조 도면1이다.
도19는 인코더의 구성 구조 도면2이다.
도20은 디코딩의 구성 구조 도면1이다.
도21은 디코더의 구성 구조 도면2이다.
본 출원의 실시예의 특정과 기술 내용을 더 자세히 알아보기 위하여 아래에서는 도면을 참조하여 본 출원의 실시예의 구현에 대하여 상세하게 설명하도록 하며, 상기 첨부된 도명은 단지 참조 설명을 위한 것일 뿐, 본 출원의 실시예에 대하여 제한하는 것이 아니다.
현재, 통신 버전의 제안서(ITU-T)와 국제 표준화 기구(ISO) /국제 전기공사 위원회(IEC)는 차세대 비디오 인코딩 표준을 개발하기 위해 범용 비디오 인코딩(VVC)라는 표준화 프로젝트를 시작하였으며, 이의 목적은 고해상도, 높은 프레임 속도, 높은 비트 심도, 높은 동적 범위, 넓은 채도 영역 및 전방향 시야각의 특성 중 하나 또는 다수 개의 고품질 비디오에 대해 인코딩을 수행할 때, 최신의 H.265/HEVC 표준과 비교할 때, VVC의 성능이 약 50% 로 향상될 수 있으며, JVET는 해당 표준화 프로젝트를 담당하고, 다양한 인트라 예측 모드 및 인터 예측 모드는 고품질 비디오에 대해 인코딩을 수행할 때 높은 압축 효율을 구현하는 데 검증되었으므로 VVC 작업 초안에서 채택된다.
CCLM 모드는 인트라 예측 모드인 바, 이가 선형 모델을 이용하여 현재 블록(즉 인코더 중의 현재 인코딩 블록 또는 디코더 중의 현재 블록)을 취득하는 채도 컴포넌트의 예측을 지시하며, 여기에서, 현재 블록의 재구성한 채도 컴포넌트가 선형 모델의 입력으로 할 때, 현재 블록의 채도 컴포넌트와 휘도 컴포넌트의 인접한 샘플(즉 참조점)을 이용하여 선형 모델의 파라미터를 컴퓨팅한다.
비디오 픽처에서, 일반적으로 제1 픽처 컴포넌트, 제2 픽처 컴포넌트와 제3 픽처 컴포넌트를 이용하여 인코딩 블록(Coding Block,CB)을 표시하며; 여기에서, 이 세 개의 픽처 컴포넌트는 각각 하나의 휘도 컴포넌트, 하나의 푸른색 채도 컴포넌트와 하나의 빨간색 채도 컴포넌트이며, 구체적으로, 휘도 컴포넌트는 통상적으로 부호 Y로 표시되고, 푸른색 채도 컴포넌트는 통상적으로 보호 Cb 또는 U로 표시되고, 빨간색 채도 컴포넌트는 통상적으로 부호 Cr 로 또한 V로 표시되며; 이렇게 하면, 비디오 픽처는 YCbCr 포맷으로 표시될 수 있고, 또한 YUV 포맷으로 표시될 수 있다.
본 출원의 실시예에서, 제1 픽처 컴포넌트는 휘도 컴포넌트일 수 있고, 제2 픽처 컴포넌트는 푸른색 채도 컴포넌트일 수 있고, 제3 픽처 컴포넌트는 빨간색 채도 컴포넌트일 수 있어, 본 출원의 실시예가 이에 대하여 구체적으로 제한하지 않는다.
H.266에서, 진일보로 인코딩 성능과 인코딩 효율을 향상시키기 위해, 크로스-컴포넌트 예측(Cross-component Prediction,CCP)에 대하여 확장 개선을 수행하였고, CCLM를 제시한다. H.266에서, CCLM는 제1 픽처 컴포넌트로부터 제2 픽처 컴포넌트로, 제1 픽처 컴포넌트로부터 제3 픽처 컴포넌트로 및 제2 픽처 컴포넌트와 제3 픽처 컴포넌트 간의 예측을 구현한다.
구체적으로, 본 출원의 실시예에서, CCLM 방법은 취도 컴포넌트로부터 채도 컴포넌트로의 예측을 구현할 때, 휘도 컴포넌트와 채도 컴포넌트 간 및 다른 채도 컴포넌트 간의 중복을 감소시키기 위해 차세대 비디오 인코딩 표준에서 크로스-컴포넌트 선형 모델 예측 모드를 이용한다. 예를 들면, 공식(1)에 의하여, 동일한 인코딩 블록의 재구성 휘도 값으로 채도의 예측 값을 구성한다.
여기에서,  는 인코딩 블록 중 샘플링 포인트의 위치 좌표를 표시하고,
는 인코딩 블록 중 샘플링 포인트의 위치 좌표를 표시하고,  는 수평 방향을 표시하고,
는 수평 방향을 표시하고,  는 수직 방향을 표시하고,
는 수직 방향을 표시하고,  는 인코딩 블록 중 위치 좌표가
는 인코딩 블록 중 위치 좌표가  인 샘플링 포인트의 제2 픽처 컴포넌트 예측 값을 표시하고,
인 샘플링 포인트의 제2 픽처 컴포넌트 예측 값을 표시하고,  는 동일한 인코딩 블록 중(다운 샘플링을 거친)위치 좌표가
는 동일한 인코딩 블록 중(다운 샘플링을 거친)위치 좌표가  인 샘플링 포인트의 제1 픽처 컴포넌트 재구성 값을 표시하며,
인 샘플링 포인트의 제1 픽처 컴포넌트 재구성 값을 표시하며,  는 선형 모델의 스케일 팩터이고,
는 선형 모델의 스케일 팩터이고,  는 오프셋 파라미터인 바, 제1 픽처 컴포넌트 인접한 참조 값과 제2 픽처 컴포넌트 인접한 참조 값의 회귀 오차를 최소화시키는 것을 통하여 도출할 수 있으며, 다음 공식(2)에 도시된 바와 같다.
는 오프셋 파라미터인 바, 제1 픽처 컴포넌트 인접한 참조 값과 제2 픽처 컴포넌트 인접한 참조 값의 회귀 오차를 최소화시키는 것을 통하여 도출할 수 있으며, 다음 공식(2)에 도시된 바와 같다.

여기에서,  는 다운 샘플링을 거친 제1 픽처 컴포넌트 인접한 참조 값(예를 들면 죄측과 상측)을 표시하고,
는 다운 샘플링을 거친 제1 픽처 컴포넌트 인접한 참조 값(예를 들면 죄측과 상측)을 표시하고,  는 제2 픽처 컴포넌트 인접한 참조 값(예를 들면 죄측과 상측)을 표시하며, N은 제2 픽처 컴포넌트 인접한 참조 값의 수량이다.
는 제2 픽처 컴포넌트 인접한 참조 값(예를 들면 죄측과 상측)을 표시하며, N은 제2 픽처 컴포넌트 인접한 참조 값의 수량이다.
구체적으로, CCLM 모드에 휘도 컴포넌트로 채도 컴포넌트에 대하여 예측하는 방법, 즉 제1 픽처 컴포넌트로 제2 픽처 컴포넌트에 대하여 예측을 수행하고, 또는 제1 픽처 컴포넌트로 제3 픽처 컴포넌트에 대하여 예측을 수행하는 방법이 포함되는 외에, 또한 두 개의 채도 컴포넌트 간의 예측, 즉 제2 픽처 컴포넌트와 제3 픽처 컴포넌트 간의 예측 방법이 포함되며, 여기에서, 본 출원의 실시예에서, Cb 컴포넌트로부터 Cr 컴포넌트를 예측할 수 있고 또한 Cr 컴포넌트로부터 Cb 컴포넌트를 예측할 수 있다.
설명해야 할 바로는, 본 출원의 실시예에서, CCLM 중 채도 컴포넌트 간의 예측, 즉 제2 픽처 컴포넌트와 제3 픽처 컴포넌트 간의 예측은 잔여 영역에 적용될 수 있다. Cr 컴포넌트에 대하여 예측을 수행하는 것을 예로 들어, Cb 잔여를 이용하여 Cr 잔여를 예측할 수 있다. Cr 컴포넌트의 마지막 예측 값은 Cr 컴포넌트의 전통 인트라 예측 값이 하나의 가중을 가진 재구성 Cb 잔여를 추가는 것을 통하여 취득되며, 공식(3)에 도시된 바와 같다.
여기에서,  는 상술한 현재 인코딩 블록 중 위치 좌표가
는 상술한 현재 인코딩 블록 중 위치 좌표가  인 샘플링 포인트의 Cr 컴포넌트의 최종 예측 값을 표시하고,
인 샘플링 포인트의 Cr 컴포넌트의 최종 예측 값을 표시하고, 
 는 재구성 Cb 컴포넌트의 예측 잔여이며, 스케일 팩터
는 재구성 Cb 컴포넌트의 예측 잔여이며, 스케일 팩터  의 컴퓨팅 방법은 CCLM 중 휘도 컴포넌트의 채도 컴포넌트로의 예측 모델 파라미터의 컴퓨팅 방식과 같고, 유일한 다른 것은 하나의 오차 함수 중의 기본
의 컴퓨팅 방법은 CCLM 중 휘도 컴포넌트의 채도 컴포넌트로의 예측 모델 파라미터의 컴퓨팅 방식과 같고, 유일한 다른 것은 하나의 오차 함수 중의 기본  값과 관련된 회귀 비용을 증가하는 것이며, 취득된 스케일 팩터
값과 관련된 회귀 비용을 증가하는 것이며, 취득된 스케일 팩터 가 -0.5의 기본값에 경향하게 하며, 구체적으로 공식(4)으로 스케일 팩터
가 -0.5의 기본값에 경향하게 하며, 구체적으로 공식(4)으로 스케일 팩터  에 대해 컴퓨팅을 수행할 수 있다.
에 대해 컴퓨팅을 수행할 수 있다.
여기에서,  는 상술한 현재 인코딩 블록의 인접한 참조 Cb 값을 표시하고,
는 상술한 현재 인코딩 블록의 인접한 참조 Cb 값을 표시하고,  는 상술한 현재 인코딩 블록의 인접한 참조 Cr 값을 표시하며, λ는 하나의 경험값, 예를 들면 λ=∑(Cb(n)·Cb(n))≫9일 수 있다.
는 상술한 현재 인코딩 블록의 인접한 참조 Cr 값을 표시하며, λ는 하나의 경험값, 예를 들면 λ=∑(Cb(n)·Cb(n))≫9일 수 있다.
현재 H.266/VVC에 있어서, CCLM 모드를 이용하여 인트라 예측을 수행하는 과정에서, 현재 블록의 인접한 블록의 위치에 대하여 결정을 수행해야 하며, 인코딩/디코딩 처리의 복잡성을 크게 증가시키고 인코딩/디코딩 효율을 낮춘다.
상술한 결함을 극복하기 위해 본 출원의 실시예에서, 인코더는 현재 블록이 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 결정할 때, 현재 블록 인접한 포인트의 다중 그룹 참조점을 기반으로 대응되는 다중 그룹 CCLM 파라미터를 결정하고, 또한 다중 그룹 CCLM 파라미터에서 최적화된 목표 CCLM 파라미터를 결정할 수 있으며, 인코더는 목표 CCLM 파라미터를 이용하는 것을 지시하는 CCLM 인덱스 값을 비트 스트림에 기록하고 디코딩 측으로 전송할 수 있어, 디코더가 비트 스트림을 분석한 후 CCLM 인덱스 값을 취득하고, CCLM 인덱스 값이 지시하는 목표 CCLM 파라미터를 결정하게 할 수 있으며, 목표 CCLM 파라미터를 이용하여 현재 블록의 인트라 예측 값을 결정할 수 있다. 다시 말하면, 본 출원의 제시된 픽처 컴포넌트의 예측 방법은 현재 블록의 다중 그룹 CCLM 파라미터 중의 목표 CCLM 파라미터를 비트 스트림에 기록하여 전달할 수 있어, 인코더/디코더가 목표 CCLM 파라미터에 의하여 현재 블록에 대하여 인트라 예측 처리를 수행하는 것을 결정하게 할 수 있으며, 인코딩/디코딩 처리의 복잡성을 크게 낮추고 인코딩/디코딩 효율을 향상시킨다.
도1은 비디오 인코딩 시스템의 구조 도면으로서, 도1에 도시된 바와 같이, 해당 비디오 인코딩 시스템(100)에는 변환과 양자화 모듈(101), 인트라 추산 모듈(102), 인트라 예측 모듈(103), 운동 보상 모듈(104), 운동 추산 모듈(105), 역변환과 역양자화 모듈(106), 필터링 제어 분석 모듈(107), 블록화 제거 필터링 및 샘플 대응형 오프셋(Sample Adaptive 0ffset,SAO)필터링 모듈(108), 헤드 정보 인코딩 및 컨텍스트를 기반으로 한 대응형 2진수 산술 인코딩(Context-based Adaptive Binary Arithmatic Coding,CABAC) 인코딩 모듈(109)과 디코딩 픽처 버퍼 모듈(110) 등 컴포넌트가 포함되며; 도2는 비디오 디코딩 시스템의 구조 도면으로서, 도2에 도시된 바와 같이, 해당 비디오 디코딩 시스템(200)에는 헤드 정보 디코딩 및 CABAC 디코딩 모듈(201), 역변환과 역양자화 모듈(202), 인트라 예측 모듈(203), 운동 보상 모듈(204), 블록화 제거 필터링 및 SAO 필터링 모듈(205)과 디코딩 픽처 버퍼 모듈(206) 등 컴포넌트가 포함된다. 비디오 픽처은 비디오 인코딩 시스템(100) 중 변환과 양자화 모듈(101), 인트라 추산 모듈(102), 인트라 예측 모듈(103), 운동 보상 모듈(104), 운동 추산 모듈(105), 블록화 제거 필터링 및 SAO 필터링 모듈(108) 및 헤드 정보 인코딩 및 CABAC 모듈(109) 등 부분을 통하여 처리된 후, 해당 비디오 픽처의 비트 스트림을 출력하며; 해당 비트 스트림은 비디오 디코딩 시스템(200) 중에 입력되고, 비디오 디코딩 시스템(200) 중 헤드 정보 디코딩 및 CABAC 디코딩 모듈(201), 역변환과 역양자화 모듈(202), 인트라 예측 모듈(203) 및 운동 보상 모듈(204) 등 부분을 통하여 처리된 후, 마지막으로 원래의 비디오 픽처를 회복한다.
본 출원에 제시된 픽처 컴포넌트의 예측 방법은, 인코딩/디코딩 과정 중의 인트라 예측 과정을 영향할 수 있으며, 예시적으로 본 출원에 제시된 픽처 컴포넌트의 예측 방법은 도1에 도시된 비디오 인코딩 시스템의 구조 중의 인트라 예측 모듈(103) 위치에 적용될 수 있고, 또한 도2에 도시된 비디오 인코딩 시스템의 구조 중의 인트라 예측 모듈(203) 위치에 적용될 수 있다.
아래에서는 본 출원의 실시예 중의 도면을 결합시켜 본 출원의 실시예 중의 기술 방안에 대해 명확하고 완전한 설명을 수행하며, 여기에서, 아래에서의 각 실시예에서, 제1 픽처 컴포넌트는 휘도 컴포넌트(Y)일 수 있고, 제2 픽처 컴포넌트는 빨간색 채도 컴포넌트(Cr)일 수 있고, 제3 픽처 컴포넌트는 푸른색 채도 컴포넌트(Cb)일 수 있어, 본 출원의 실시예가 이에 대하여 구체적으로 제한하지 않는다.
본 출원의 일 실시예에서, 픽처 컴포넌트의 예측 방법을 제공하는 바, 인코더에 적용되며, 도3은 픽처 컴포넌트의 예측 방법의 구현 흐름 도면1로서, 도3에 도시된 바와 같이, 본 출원의 실시예에서, 인코더가 픽처 컴포넌트를 예측하는 방법에는 다음과 같은 단계가 포함될 수 있다.
단계101, 현재 블록이 CCLM를 이용하여 상기 현재 블록의 인트라 예측 값을 결정할 때, 상기 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정하며; 여기에서, 상기 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함된다.
본 출원의 실시예에서, 만일 현재 블록이 CCLM를 이용하여 상기 현재 블록의 인트라 예측 값을 결정하면, 인코더가 상기 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정할 수 있다. 구체적으로 한 그룹 참조점은 한 그룹 CCLM 파라미터에 대응된다.
본 출원의 실시예에서, 각 한 그룹의 CCLM 파라미터에 모두 대응되는 한 그룹 참조점을 통해 결정된 스케일 팩터와 오프셋 파라미터가 포함되는 것을 이해할 것이다.
설명해야 할 바로는, 본 출원의 실시예에서, 비디오 픽처는 다수 개의 픽처 블록으로 나눌 수 있어, 여기에서, 현재 블록, 즉 인코딩하고자 하는 픽처 블록은 인코딩 블록(Coding Block,CB)이라고 칭할 수 있다. 구체적으로, 각 인코딩 블록에 제1 픽처 컴포넌트, 제2 픽처 컴포넌트 및 제3 픽처 컴포넌트가 포함될 수 있으며, 상응하게, 현재 블록은 비디오 픽처 중 현재 제1 픽처 컴포넌트, 제2 픽처 컴포넌트 또는 제3 픽처 컴포넌트 예측을 수행하고자 하는 인코딩 블록이다.
본 출원의 실시예에서, 현재 블록이 제1 픽처 컴포넌트 예측을 수행하고 또한 제1 픽처 컴포넌트는 휘도 컴포넌트이고, 즉 예측하고자 하는 픽처 컴포넌트가 휘도 컴포넌트이라고 가정하면, 현재 블록은 또한 휘도 블록이라고 칭할 수 있으며; 또는, 현재 블록이 제2 픽처 컴포넌트 예측을 수행하고, 또한 제2 픽처 컴포넌트가 채도 컴포넌트이고, 즉 예측하고자 하는 픽처 컴포넌트가 채도 컴포넌트라고 가정하면, 현재 블록이 또한 채도 블록이라고 칭할 수 있는 것을 이해할 것이다.
설명해야 할 바로는, 본 출원의 실시예에서, 현재 블록의 다중 그룹 참조점에 현재 블록과 인접된 픽셀 샘플링 포인트가 포함될 수 있어, 여기에서, 다중 그룹 참조점 중의 각 그룹 참조점에 현재 블록과 인접된 하나 또는 다수 개의 픽셀 샘플링 포인트가 포함될 수 있다.
다시 말하면, 본 출원에서, 인코더가 현재 블록이 CCLM를 이용하여 현재 블록의 인트라 예측 값에 대하여 결정을 수행하는 것을 결정한 후, 현재 블록과 인접된 샘플링 포인트를 이용하여 CCLM 파라미터의 결정을 수행할 수 있으며, 즉 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹의 CCLM 파라미터를 결정한다.
나아가, 본 출원의 실시예에서, 인코더가 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정할 때, 상기 다중 그룹 참조점 중의 한 그룹 참조점을 사용하여 해당 한 그룹 참조점과 대응되는 한 그룹 CCLM 파라미터를 컴퓨팅할 수 있고, 그 다음에 상기 다중 그룹 참조점 중 각 한 그룹 참조점을 순회할 수 있어, 다중 그룹 참조점에 대응되는 다중 그룹 CCLM 파라미터를 결정할 수 있다.
본 출원의 실시예에서, 다중 그룹의 CCLM 파라미터 중의 각 그룹 CCLM 파라미터에는 모두 스케일 팩터와 오프셋 파라미터가 포함될 수 있는 것을 이해할 것이다. 구체적으로, 스케일 팩터는 상술한 공식 (1) 중의  일 수 있고, 오프셋 파라미터는 상술한 공식 (1) 중의
일 수 있고, 오프셋 파라미터는 상술한 공식 (1) 중의  일 수 있다. 다시 말하면, 현재 블록의 한 그룹의 참조점에 대하여, 인코더가 대응되는 스케일 팩터
일 수 있다. 다시 말하면, 현재 블록의 한 그룹의 참조점에 대하여, 인코더가 대응되는 스케일 팩터 와 오프셋 파라미터
와 오프셋 파라미터 가 포함되는 한 그룹의 CCLM 파라미터를 결정할 수 있어, 상응하게, 현재 블록의 다중 그룹의 참조점을 기반으로 마지막으로 다중 그룹의 스케일 팩터
가 포함되는 한 그룹의 CCLM 파라미터를 결정할 수 있어, 상응하게, 현재 블록의 다중 그룹의 참조점을 기반으로 마지막으로 다중 그룹의 스케일 팩터  와 오프셋 파라미터
와 오프셋 파라미터 가 포함되는 CCLM 파라미터를 결정할 수 있다.
가 포함되는 CCLM 파라미터를 결정할 수 있다.
나아가, 본 출원의 실시예에서, 인코딩 모드에는 전통 인트라 예측 모드와 비전통 인트라 예측 모드 두 종류가 포함될 수 있다. 구체적으로, 전통 인트라 예측 모드에 직류(Direct Current,DC) 모드, 평면(PLANAR) 모드 및 각도 모드 등이 포함될 수 있으며; 비전통 인트라 예측 모드에는 또한 매트릭스를 기반으로 한 인트라 예측(Matrix-based Intra Prediction,MIP)모드, CCLM 모드, 인트라 블록 중복(Intra Block Copy,IBC)모드 및 PLT(Palette) 모드 등이 포함될 수 있다.
다시 말하면 본 출원의 실시예에서, 인코더는 예측 모드 파라미터의 설정을 통하여 현재 블록의 인코딩 모드가 전통 인트라 예측 모드 또는 비전통 인트라 예측 모드의 구체적인 어느 한 인코딩 모드인지 결정할 수 있다.
본 출원의 실시예에서, 나아가 인코더는 현재 블록의 예측 모드 파라미터를 결정할 때, 먼저 현재 블록의 예측하고자 하는 픽처 컴포넌트를 결정할 수 있으며; 그 후 현재 블록의 파라미터를 기반으로 다양한 예측 모드를 이용하여 각각 예측하고자 하는 픽처 컴포넌트에 대하여 예측 인코딩을 수행하고, 다양한 예측 모드 하 각 예측 모드에 대응되는 레이트 왜곡 결과를 컴퓨팅하며; 마지막으로 컴퓨팅하여 취득된 다수 개의 레이트 왜곡 비용 결과에서 최소한 레이트 왜곡 비용 결과를 선택하고, 또한 최소한 레이트 왜곡 비용 결과에 대응되는 예측 모드를 현재 블록의 예측 모드 파라미터로 결정한다.
다시 말하면, 인코더 측에서, 현재 블록에 대하여 다양한 예측 모드를 이용하여 각각 예측하고자 하는 픽처 컴포넌트에 인코딩을 수행할 수 있다. 여기에서, 다양한 예측 모드에는 통상적으로 전통 인트라 예측 모드와 비전통 인트라 예측 모드가 포함된다.
나아가, 본 출원의 실시예에서, 인코더는 다양한 예측 모드를 이용하여 각각 현재 블록에 대하여 인코딩을 수행한 후, 각 예측 모드에 대응되는 레이트 왜곡 비용 결과를 취득할 수 있으며; 그 다음에 취득된 다수 개의 레이트 왜곡 비용 결과에서 최소한 레이트 왜곡 비용 결과를 선택하고, 또한 해당 최소한 레이트 왜곡 비용 결과에 대응되는 예측 모드를 현재 블록의 예측 모드 파라미터로 결정하며; 이렇게 하면, 마지막으로 결정된 예측 모드를 이용하여 현재 블록에 대하여 인코딩을 진행하고, 또한 이런 예측 모드 하에서, 예측 잔여가 작게 하고 인코딩 효율을 향상시킬 수 있다.
본 출원의 실시예에서, 인코더는 현재 블록의 예측 모드 파라미터를 결정한 후 예측 모드 파라미터를 비트 스트림에 기록할 수 있어, 디코딩 측으로 전송된 후 디코더가 비트 스트림을 분석하는 것을 통하여 현재 블록의 예측 모드 파라미터를 결정하게 할 수 있다.
단계 102, 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터를 결정하고, 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정하고 비트 스트림에 기록하며; 여기에서, CCLM 인덱스 값은 목표 CCLM 파라미터를 이용하는 것을 지시한다.
본 출원의 실시예에서, 인코더는 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정한 후, 계속하게 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터를 결정할 수 있어, 그 후 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정하고 비트 스트림에 기록한다. 구체적으로, 본 출원에서 CCLM 인덱스 값은 목표 CCLM 파라미터를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 지시한다.
나아가, 본 출원에서, 인코더는 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터를 결정한 후, 목표 CCLM 파라미터에 의하여 목표 CCLM 파라미터와 대응되는 인덱스 값을 설정해야 하며, 즉 CCLM 인덱스 값을 설정하며, 그 후 CCLM 인덱스 값을 비트 스트림에 기록하고 디코딩 측으로 전송하며, 디코더가 비트 스트림을 분석하여 취득한 CCLM 인덱스 값을 통하여 목표 CCLM 파라미터를 이용하여 현재 블록의 인트라 예측 값의 결정을 수행하는 것을 결정하게 할 수 있다.
설명해야 할 바로는, 본 출원의 실시예에서, 인코더는 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터를 결정할 때, 레이트 왜곡 최적화(Rate Distortion Optimization,RDO)의 방법을 이용하여 다중 그룹 CCLM 파라미터에서 목표 비용 함수 최적값에 대응되는 한 그룹 CCLM 파라미터를 선택하고 또한 해당 한 그룹 CCLM 파라미터를 목표 CCLM 파라미터로 결정할 수 있다.
예시적으로, 본 출원에서, 인코더는 현재 블록의 파라미터를 기반으로 다중 그룹 CCLM 파라미터를 이용하여 각각 예측하고자 하는 픽처 컴포넌트에 대하여 예측 인코딩을 수행하고, 다중 그룹 CCLM 파라미터 중의 각 그룹 CCLM 파라미터에 대응되는 레이트 왜곡 비용 결과를 컴퓨팅하며; 마지막으로 컴퓨팅하여 취득된 다수 개의 레이트 왜곡 비용 결과에서 최소한 레이트 왜곡 비용 결과를 선택하고, 또한 최소한 레이트 왜곡 비용 결과에 대응되는 한 그룹 CCLM 파라미터를 현재 블록의 목표 CCLM 파라미터로 결정할 수 있다.
나아가, 본 출원의 실시예에서, 인코더는 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정하고 또한 비트 스트림에 기록할 때, 먼저 CCLM 인덱스 값을 목표 CCLM 파라미터가 다중 그룹 CCLM 파라미터 중에 대응되는 인덱스 순서 번호로 설정할 수 있어, 그 후 CCLM 인덱스 값을 비트 스트림에 기록한다. 다시 말하면, 본 출원에서, 다중 그룹 CCLM 파라미터 중의 각 한 그룹 CCLM 파라미터에 모두 대응되는 인덱스 순서 번호가 존재하며, 인코더가 다중 그룹 CCLM 파라미터에서 현재 블록이 이용하는 목표 CCLM 파라미터를 결정한 후, 목표 CCLM 파라미터에 대응되는 인덱스 순서 번호를 이용하여 CCLM 인덱스 값을 설정할 수 있다.
본 출원의 실시예에서, 인코더는 먼저 다중 그룹 참조점 중의 각 그룹 참조점의 위치 정보를 결정할 수 있으며; 그 후 각 그룹 참조점의 위치 정보에 의하여 다중 그룹 CCLM 파라미터 중의 각 그룹 CCLM 파라미터의 인덱스 순서 번호를 결정할 수 있는 것을 이해할 것이다.
설명해야 할 바로는, 본 출원의 실시예에서, 현재 블록의 사이즈 정보를 기반으로 각 그룹 참조점에 대응되는 위치 정보에는 시작 위치와 스텝 사이즈가 포함될 수 있다. 구체적으로 인코더는 현잽 블록의 너비(W)와 높이(H)를 이용하여 각 그룹 참조점의 위치 정보에 대하여 컴퓨팅을 수행할 수 있다.
예시적으로 본 출원의 실시예에서, 인코더는 다음과 같은 공식에 의하여 각각 취득된 시작 위치(Δ)와 스템 사이즈(L)를 컴퓨팅할 수 있다.
Δ=L/(N/2) (5)
s=Δ/2 (6)
여기에서, L는 현재 블록의 상측 인접한 위치 중 참조점의 수량이고, 또는 현재 블록의 좌측 인접한 위치 중 참조점의 수량이며; N은 참조점을 구성하기를 기대하는 서브 세트의 인접한 샘플의 수량이다.
나아가, 본 출원의 실시예에서, 인코더는 각 그룹 참조점의 위치 정보에 의하여 다중 그룹 CCLM 파라미터 중의 각 그룹 CCLM 파라미터의 인덱스 순서 번호를 결정할 때, 먼저 각 그룹 참조점의 위치 정보에 의하여 다중 참조점과 현재 블록 간의 다수 개의 거리 파라미터를 결정할 수 있으며; 그 후 거리 파라미터의 작은 것으로부터 큰 것으로의 순서로 순차적으로 다중 그룹 CCLM 파라미터 중의 각 그룹 CCLM 파라미터의 인덱스 순서 번호를 설정한다.
다시 말하면, 본 출원에서, 인코더는 먼저 다중 그룹 참조점 중의 각 그룹 참조점의 위치 정보에 의하여 각각 다중 그룹 참조점과 현재 블록 간의 다수 개의 거리 파라미터를 컴퓨팅하여 취득할 수 있으며, 즉 다중 그룹 참조점 중의 어느 한 그룹 참조점은 모두 하나의 거리 파라미터에 대응된다. 이어서, 인코더는 다수 개의 거리 파라미터에 대하여 랭킹을 수행할 수 있어, 예를 들면, 작은 것으로부터 큰 것으로의 순서로 다수 개의 거리 파라미터에 대하여 랭킹을 수행하고, 랭킹된 후의 거리 파라미터를 취득하며, 상응하게 인코더는 랭킹된 후의 거리 파라미터에 의하여 다중 그룹 CCLM 파라미터 중의 각 그룹 CCLM 파라미터에 대하여 인덱스 순서 번호의 설정을 수행할 수 있다. 구체적으로, 다중 그룹 참조점, 다중 그룹 CCLM 파라미터 및 다중 그룹 거리 파라미터 간의 대응관계를 기반으로 인코더는 랭킹된 후의 거리 파라미터에 따라 순차적으로 다중 그룹 CCLM 파라미터 중의 각 그룹 CCLM 파라미터의 인덱스 순서 번호를 설정할 수 있다.
본 출원의 실시예에서, 인코더는 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정한 후, CCLM 인덱스 값을 비트 스트림 중 현재 블록 데이터가 포함되는 데이터 유닛에 기록하며, 차후 디코더 측에서 분석 처리를 수행하기 편한 것을 이해할 것이다.
단계103, 목표 CCLM 파라미터에 의하여 현재 블록의 인트라 예측 값을 결정한다.
본 출원의 실시예에서, 인코더는 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터를 결정한 후, 목표 CCLM 파라미터에 의하여 현재 블록의 인트라 예측 값을 결정할 수 있다.
본 출원에서 인코더는 현재 블록이 이용하는 목표 CCLM 파라미터를 결정한 후, 목표 CCLM 파라미터를 이용하여 진일보로 현재 블록의 인트라 예측 값을 결정할 수 있어, 현재 블록과 인트라 예측 값 간의 예측 차이값을 컴퓨팅할 수 있다.
예시적으로, 본 출원의 실시예에서, 목표 CCLM 파라미터에 현재 블록이 인트라 예측할 때 이용하는 스케일 팩터와 오프셋 파라미터가 포함되기 때문에 인코더가 목표 CCLM 파라미터에 의하여 현재 블록의 인트라 예측 값을 결정할 때, 상술한 공식(1)을 통하여 인코딩 블록 중(다운 샘플링을 거친) 위치 좌표가  인 샘플링 포인트의 제1 픽처 컴포넌트 재구성 값
인 샘플링 포인트의 제1 픽처 컴포넌트 재구성 값 을 이용하여 인코딩 블록 중 위치 좌표가
을 이용하여 인코딩 블록 중 위치 좌표가  인 샘플링 포인트의 제2 픽처 컴포넌트 예측 값
인 샘플링 포인트의 제2 픽처 컴포넌트 예측 값 을 컴퓨팅하여 취득할 수 있다.
을 컴퓨팅하여 취득할 수 있다.
예시적으로 본 출원의 실시예에서, 인코더는 현재 블록의 인트라 예측 값을 결정한 후, 게속하게 현재 블록의 픽셀 실제 값과 인트라 예측 값에 의하여 차이값 컴퓨팅을 수행할 수 있으며, 컴퓨팅하여 취득된 차이값을 예측 차이값으로 하여 차후 예측 차이값에 대하여 변환 처리를 수행하기 편한다.
다시 말하면, 본 출원의 실시예에서, 인코더는 목표 CCLM 파라미터에 의하여 현재 블록의 인트라 예측 값을 결정할 ?, 선형 모델을 이용하여 목표 CCLM 파라미터와 현재 블록의 제1 픽처 컴포넌트의 재구성 값에 의하여 현재 블록의 제2 픽처 컴포넌트의 예측 값을 컴퓨팅할 수 있다.
구체적으로, 본 출원에서, 제1 픽처 컴포넌트는 휘도 컴포넌트이며; 제2 픽처 컴포넌트는 채도 컴포넌트이다.
도4는 픽처 컴포넌트의 예측 방법의 구현 흐름 도면2로서, 도4에 도시된 보와 같이, 본 출원에서, 인코더는 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정하기 전, 즉 단계 101 전, 인코더가 픽처 컴포넌트를 예측하는 방법에는 또한 다음과 같은 단계가 포함될 수 있다.
단계104, CCLM 모드 인덱스 파라미터를 결정하며; 여기에서, CCLM 모드 인덱스 파라미터는 현재 블록이 이용하는 CCLM 모드를 지시하고, CCLM 모드는 CCLM를 이용하여 인트라 예측 값을 결정하는 컴퓨팅 도출 방식을 지시한다.
단계105, CCLM 모드 인덱스 파라미터를 비트 스트림에 기록한다.
본 출원의 실시예에서, 인코더는 먼저 현재 블록의 CCLM 모드 인덱스 파라미터를 결정할 수 있으며, 그 후 CCLM 모드 인덱스 파라미터를 이용하여 현재 블록이 이용하는 CCLM 모드를 결정할 수 있으며, CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 컴퓨팅 도출 방식을 취득할 수 있게 한다.
본 출원의 실시예에서, CCLM 모드에 있어서, 구체적으로 다양한 다른 인트라 예측 모드가 포함될 수 있기 때문에 인코더는 다른 인덱스 파라미터를 이용하여 CCLM 모드 중의 다른 예측 모드에 대하여 보정과 구분을 수행해야 한다. 다시 말하면, 다른 CCLM 모드는 다른 CCLM 모드 인덱스 파라미터에 대응된다.
나아가, 본 출원에서, 인코더는 현재 블록이 이용하는 CCLM 모드를 결정한 후, CCLM 모드에 의하여 현재 블록의 인트라 예측값의 컴퓨팅 도출 방식을 결정할 수 있어, 아울러 CCLM 모드에 대응되는 CCLM 모드 인덱스 파라미터를 결정할 수 있다.
나아가, 본 출원의 실시예에서, 인코더는 CCLM 모드 인덱스 파라미터의 값을 현재 블록이 이용하는 CCLM 모드로 설정할 수 있고, 또한 비트 스트림에 기록하고 디코딩 측에 전송하며, 차후 인코더가 비트 스트림을 분석하는 것을 통하여 CCLM 모드 인덱스 파라미터를 취득하며 디코더가 CCLM 모드 인덱스 파라미터에 의해 지시된 CCLM 모드를 결정하기 편한다.
본 출원의 실시예가 픽처 컴포넌트의 예측 방법을 제공하는 바, 인코더는 현재 블록이 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정할 때, 현재 블록의 다중 그룹의 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정하며; 여기에서, CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며; 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터를 결정하고, 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정하고 또한 비트 스트림에 기록하며; 여기에서, CCLM 인덱스 값은 목표 CCLM 파라미터를 이용하는 것을 지시하며; 목표 CCLM 파라미터에 의하여 현재 블록의 인트라 예측 값을 결정한다. 이로부터 알 수 있는 바와 같이, 본 출원의 실시예에서, 인코더는 현재 블록이 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 결정할 때, 현재 블록과 인접된 포인트의 다중 그룹 참조점을 기반으로 대응되는 다중 그룹 CCLM 파라미터를 결정할 수 있고, 또한 다중 그룹 파라미터에서 최적화된 목표 CCLM 파라미터를 결정하며, 인코더는 목표 CCLM 파라미터를 이용한다고 지시하는 CCLM 인덱스 값을 비트 스트림에 기록하고 디코딩 측으로 전송할 수 있으며, 디코더가 비트 스트림을 분석한 후 CCLM 인덱스 값을 취득하고 또한 CCLM 인덱스 값이 지시한 목표 CCLM 파라미터를 결정하게 할 수 있으며, 목표 CCLM 파라미터를 이용하여 현재 블록의 인트라 예측 값을 결정할 수 있다. 다시 말하면, 본 출원의 제시된 픽처 컴포넌트의 예측 방법은 현재 블록의 다중 그룹 CCLM 파라미터 중의 목표 CCLM 파라미터를 비트 스트림에 기록하여 전달할 수 있어, 인코더/디코더가 목표 CCLM 파라미터에 의하여 현재 블록에 대하여 인트라 예측 처리를 수행하는 것을 결정하게 할 수 있으며, 인코딩/디코딩 처리의 복잡성을 크게 낮추고 인코딩/디코딩 효율을 향상시킨다.
상술한 실시예를 기반으로, 본 출원의 다른 일 실시예가 픽처 컴포넌트의 예측 방법을 제공하는 바, 해당 픽처 컴포넌트의 예측 방법은 디코더에 적용되며, 도5는 픽처 컴포넌트의 예측 방법의 구현 흐름 도면3으로서, 도5에 도시된 바와 같이, 디코더가 픽처 컴포넌트를 예측하는 방법에는 다음과 같은 단계가 포함될 수 있다.
단계 201, 비트 스트림을 분석하여 현재 블록의 예측 모드 파라미터를 결정한다.
본 출원의 실시예에서, 디코더가 비트 스트림을 분석하여, 현재 블록의 예측 모드 파라미터를 결정할 수 있다. 구체적으로 디코더는 예측 모드 파라미터의 값에 의하여 진일보로 현재 블록이 이용하는 인트라 예측 모드를 결정할 수 있으며, 다시 말하면, 본 출원에서, 예측 모드 파라미터는 현재 블록의 인코딩 모드 및 해당 모드의 관련된 파라미터를 지시할 수 있다.
나아가, 본 출원의 실시예에서, 인코딩 모드에는 전통 인트라 예측 모드와 비 전통 인트라 예측 모드 두 종류가 포함될 수 있다. 구체적으로, 전통 인트라 예측 모드에는 DC 모드, PLANAR 모드 및 각도 모드 등이 포함될 수 있으며; 비전통 인트라 예측 모드에는 또한 MIP모드, CCLM 모드, IBC 모드 및 PLT 모드 등이 포함될 수 있다.
다시 말하면 본 출원의 실시예에서, 디코더는 예측 모드 파라미터를 통하여 현재 블록의 인코딩 모드가 전통 인트라 예측 모드 또는 비전통 인트라 예측 모드의 구체적인 어느 한 인코딩 모드인지 결정할 수 있다.
본 출원의 실시예에서, 나아가 인코딩 측에서, 인코더는 현재 블록의 예측 모드 파라미터를 결정할 때, 먼저 현재 블록의 예측하고자 하는 픽처 컴포넌트를 결정할 수 있으며; 그 후 현재 블록의 파라미터를 기반으로 다중 예측 모드를 이용하여 각각 예측하고자 하는 픽처 컴포넌트에 대하여 예측 인코딩을 수행하고, 다양한 예측 모드 하 각 예측 모드에 대응되는 레이트 왜곡 비용 결과를 컴퓨팅하며; 마지막으로 컴퓨팅하여 취득된 다수 개의 레이트 왜곡 비용 결과에서 최소한 레이트 왜곡 비용 결과를 선택하고, 또한 최소한 레이트 왜곡 비용 결과에 대응되는 예측 모드를 현재 블록의 예측 모드 파라미터로 결정한다. 다시 말하면, 인코더 측에서, 현재 블록에 대하여 다양한 예측 모드를 이용하여 각각 예측하고자 하는 픽처 컴포넌트에 인코딩을 수행할 수 있다. 여기에서, 다양한 예측 모드에는 통상적으로 전통 인트라 예측 모드와 비전통 인트라 예측 모드가 포함된다.
나아가, 본 출원의 실시예에서, 인코더는 해당 최소한 레이트 왜곡 비용 결과에 대응되는 예측 모드에 의하여 현재 블록의 예측 모드 파라미터로 설정된 후, 예측 모드 파라미터를 비트 스트림에 기록하고, 디코딩 측으로 전송할 수 있어, 디코더가 비트 스트림을 분석하는 것을 통하여 현재 블록의 예측 모드 파라미터를 결정하게 할 수 있어, 디코더가 나아가 결정된 예측 모드를 이용하여 현재 블록에 대하여 디코딩을 수행할 수 있고 또한 이런 예측 모드 하에서, 예측 잔여가 작게 하고, 디코딩 효율을 향상시킬 수 있다.
단계 202, 예측 모드 파라미터가 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 지시할 때, 비트 스트림을 분석하여 현재 블록의 CCLM 인덱스 값을 결정한다.
단계 203, CCLM 인덱스 값에 의하여, 현재 블록의 목표 CCLM 파라미터를 결정하며; 여기에서, 목표 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함된다.
본 출원의 실시에에서, 디코더는 비트 스트림을 분석하여 현재 블록의 예측 모드 파라미터를 결정한 후, 만일 예측 모드 파라미터는 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 지시하면, 디코더가 계속하게 비트 스트림을 분석하여 현재 블록의 CCLM 인덱스 값을 결정할 수 있어, 그 후 계속하게 CCLM 인덱스 값에 의하여 진일보로 현재 블록의 목표 CCLM 파라미터를 결정할 수 있다.
본 출원에서 CCLM 인덱스 값은 현재 블록이 목표 CCLM 파라미터를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 지시하는 것을 이해할 것이다. 여기에서, 목표 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함된다.
설명해야 할 바로는, 본 출원의 실시예에서, 스케일 팩터는 상술한 공식 (1) 중의  일 수 있고, 오프셋 파라미터는 상술한 공식 (1) 중의
일 수 있고, 오프셋 파라미터는 상술한 공식 (1) 중의  일 수 있다.
일 수 있다.
나아가, 본 출원의 실시예에서, 디코더는 CCLM 인덱스 값에 의하여 현재 블록의 목표 CCLM 파라미터를 결정할 때, 먼저 CCLM 인덱스 값에 의하여 현재 블록의 목표 참조점을 결정할 수 있으며; 그 후 목표 참조점에 의하여 현재 블록의 목표 CCLM 파라미터를 결정한다.
설명해야 할 바로는, 본 출원의 실시예에서, 목표 참조점은 현재 블록과 인접된 하나 또는 다수 개의 픽셀 샘플링 포인트일 수 있다. 구체적으로, 현재 블록에 다중 그룹 참조점이 존해하고 또한 목표 참조점은 다중 그룹 참조점 중의 한 그룹 참조점일 수 있다.
본 출원에서, 디코더는 CCLM 인덱스 값에 의하여 현재 블록의 목표 참조점을 결정할 때, CCLM 인덱스 값에 의하여 현재 블록의 다중 그룹 참조점에서 목표 참조점을 결정할 수 있는 것을 이해할 것이다.
설명해야 할 바로는, 본 출원의 실시예에서, 현재 블록의 다중 그룹 참조점에 현재 블록과 인접된 픽셀 샘플링 포인트가 포함될 수 있어, 상응하게, 현재 블록의 다중 그룹 참조점 중의 각 그룹 참조점에 현재 블록과 인접된 하나 또는 다수 개의 미리 설정된 위치의 픽셀 샘플링 포인트가 포함될 수 있다.
구체적으로, 본 출원에서, 디코더가 CCLM 인덱스에 의하여, 현재 블록의 다중 그룹 첨조점에서, 목표 참조점을 결정할 때, 먼저 다중 그룹 참조점 중의 각 그룹 참조점의 위치 정보를 결정할 수 있으며; 그 후 각 그룹 참조점의 위치 정보에 의하여 다중 그룹 참조점과 현재 블록 간의 다수 개의 거리 파라미터를 결정하며; 나아가 거리 파아미터의 작은 것으로부터 큰 것으로의 순서로 순차적으로 다중 그룹 참조점 중의 각 그룹 참조점의 위치 인덱스 순서 번호를 설정하며; 마지막으로 다중 그룹 참조점에서, 위치 인덱스 순서 번호와 CCLM 인덱스 값이 지시한 인덱스 순서 번호가 같은 한 그룹 참조점을 선택하여 목표 참조점으로 한다.
다시 말하면, 본 출원에서, 디코더는 먼저 각각 다중 그룹 참조점 중의 각 그룹 참조점의 위치 정보를 컴퓨팅할 수 있으며, 즉 다중 참조점 중의 어느 한 그룹은 모두 하나의 위치 정보에 대응되며, 나아가 다중 그룹 참조점 중의 각 그룹 참조점의 위치 정보에 의하여 각각 다중 그룹 참조점과 현재 블록 간의 다수 개의 거리 파라미터를 컴퓨팅하여 취득하며, 즉 다중 그룹 참조점 중의 어느 한 그룹 참조점은 모두 하나의 거리 파라미터에 대응된다. 이어서, 디코더는 다수 개의 거리 파라미터에 대하여 랭킹을 수행할 수 있어, 예를 들면, 작은 것으로부터 큰 것으로의 순서로 다수 개의 거리 파라미터에 대하여 랭킹을 수행하고, 랭킹된 후의 거리 파라미터를 취득하며, 상응하게 디코더는 랭킹된 후의 거리 파라미터에 의하여 다중 그룹 참조점 중의 각 그룹 참조점에 대하여 위치 인덱스 순서 번호의 설정을 수행할 수 있다. 구체적으로, 다중 그룹 참조점과 다중 그룹 거리 파라미터 간의 대응관계를 기반으로 디코더는 랭킹된 후의 거리 파라미터에 따라 순차적으로 다중 그룹 참조점 중의 각 그룹 참조점의 위치 인덱스 순서 번호를 설정할 수 있다.
나아가, 본 출원의 실시예에서, 인코딩단에서 인코더가 다중 그룹 참조점, 다중 그룹 CCLM 파라미터 및 다중 그룹 거리 파라미터 간의 대응관계를 기반으로 랭킹된 후의 거리 파라미터에 따라 순차적으로 다중 그룹 CCLM 파라미터 중의 각 그룹 CCLM 파라미터의 인덱스 순서 번호를 설정하며, 디코딩단에서, 디코더가 다중 그룹 참조점과 다중 그룹 거리 파라미터 간의 대응관계를 기반으로 랭깅된 후의 거리 파라미터에 따라 순차적으로 다중 그룹 참조점 중의 각 그룹 첨조점의 위치 인덱스 순서 번호를 설정한다. 따라서, 한 그룹 참조점의 CCLM 파라미터의 인덱스 순서 번호는 해당 그룹 참조점의 위치 인덱스 순서 번호와 맵핑 관계가 존재한다. 나아가 디코더가 CCLM 인덱스 값을 분석하여 취득한 후, CCLM 인덱스 값이 지시한 인덱스 순서 번호에 의하여 다중 그룹 참조점에서 목표 참조점을 선택할 수 있다.
예시적으로, 본 출원에서, 디코더는 비트 스트림을 분석하여 취득한 CCLM 인덱스 값이 지시한 인덱스 순서 번호는 5이면, 디코더가 다중 그룹 참조점 중의, 위치 인덱스 순서 번호가 5인 한 그룹 참조점을 목표 참조점으로 결정할 수 있다.
본 출원의 실시예에서, 나아가, 디코더는 CCLM 인덱스 값에 의하여 현재 블록의 목표 CCLM 파라미터를 결정할 때, 또한 먼저 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정할 수 있으며; 그 후 다중 그룹 CCLM 파라미터 중의, CCLM 인덱스 값이 지시한 한 그룹 CCLM 파라미터를 목표 CCLM 파라미터로 한다.
본 출원에서, 현재 블록의 다중 그룹 참조점에 현재 블록과 인접된 픽셀 샘플링 포인트가 포함될 수 있어, 상응하게, 현재 블록의 다중 그룹 참조점 중의 각 그룹 참조점에 현재 블록과 인접된 하나 또는 다수 개의 미리 설정된 위치의 픽셀 샘플링 포인트가 포함될 수 있는 것을 이해할 것이다.
구체적으로, 본 출원에서, 디코더가 다중 그룹 CCLM 파라미터 중의 CCLM 인덱스 값이 지시한 한 그룹 CCLM 파라미터를 목표 CCLM 파라미터로 할 때, 먼저 다중 그룹 참조점 중의 각 그룹 참조점의 위치 정보를 결정할 수 있으며; 그 후 각 그룹 참조점의 위치 정보에 의하여 다중 그룹 참조점과 현재 블록 간의 다수 개의 거리 파라미터를 결정하며; 나아가 거리 파아미터의 작은 것으로부터 큰 것으로의 순서로 순차적으로 순차적으로 다중 그룹 CCLM 파라미터 중의 각 그룹 CCLM 파라미터의 인덱스 순서 번호를 설정할 수 있으며; 마지막으로 CCLM 파라미터 중의 인덱스 순서 번호와 CCLM 인덱스 값이 지시한 인덱스 순서 번호가 같은 한 그룹 CCLM 파라미터를 목표 CCLM 파라미터로 할 수 있다.
다시 말하면, 본 출원의 실시예에서, 디코더는 먼저 각각 다중 그룹 참조점 중의 각 그룹 참조점의 위치 정보를 컴퓨팅할 수 있으며, 즉 다중 참조점 중의 어느 한 그룹은 모두 하나의 위치 정보에 대응되며, 나아가 다중 그룹 참조점 중의 각 그룹 참조점의 위치 정보에 의하여 각각 다중 그룹 참조점과 현재 블록 간의 다수 개의 거리 파라미터를 컴퓨팅하여 취득할 수 있으며, 즉 다중 그룹 참조점 중의 어느 한 그룹 참조점은 모두 하나의 거리 파라미터에 대응된다. 이어서, 디코더는 다수 개의 거리 파라미터에 대하여 랭킹을 수행할 수 있어, 예를 들면, 작은 것으로부터 큰 것으로의 순서로 다수 개의 거리 파라미터에 대하여 랭킹을 수행하고, 랭킹된 후의 거리 파라미터를 취득하며, 상응하게 디코더는 랭킹된 후의 거리 파라미터에 의하여 다중 그룹 CCLM 파라미터 중의 각 그룹 CCLM 파라미터에 대하여 인덱스 순서 번호의 설정을 수행할 수 있다. 구체적으로, 다중 그룹 참조점, 다중 그룹 CCLM 파라미터 및 다중 거리 파라미터 간의 대응관계를 기반으로 디코더는 랭킹된 후의 거리 파라미터에 따라 순차적으로 다중 그룹 CCLM 파라미터 중의 각 그룹 CCLM 파라미터의 인덱스 순서 번호를 설정할 수 있다.
나아가, 본 출원의 실시예에서, 인코딩단에서 인코더가 다중 그룹 참조점, 다중 그룹 CCLM 파라미터 및 다중 그룹 거리 파라미터 간의 대응관계를 기반으로 랭킹된 후의 거리 파라미터에 따라 순차적으로 다중 그룹 CCLM 파라미터 중의 각 그룹 CCLM 파라미터의 인덱스 순서 번호를 설정하며, 디코딩단에서, 디코더가 또한 다중 그룹 참조점, 다중 그룹 CCLM 파라미터 및 다중 그룹 거리 파라미터 간의 대응관계를 기반으로 랭깅된 후의 거리 파라미터에 따라 순차적으로 다중 그룹 CCLM 파라미터 중의 각 그룹 CCLM 파라미터의 인덱스 순서 번호를 설정한다. 따라서, 디코더가 CCLM 인덱스 값을 분석하여 취득한 후, CCLM 인덱스 값이 지시한 인덱스 순서 번호에 의하여 다중 그룹 CCLM 파라미터에서 상응되는 한 그룹 CCLM 파라미터를 선택하여 목표 CCLM 파라미터로 한다.
예시적으로, 본 출원에서, 디코더는 비트 스트림을 분석하여 취득한 CCLM 인덱스 값이 지시한 인덱스 순서 번호는 3이면, 디코더가 다중 그룹 CCLM 파라미터 중의, 인덱스 순서 번호가 3인 한 그룹 참조점을 목표 참조점으로 결정할 수 있다.
단계204, 목표 CCLM 파라미터에 의하여 현재 블록의 인트라 예측 값을 결정한다.
본 출원의 실시예에서, 디코더는 CCLM 인덱스 값에 의하여 현재 블록의 목표 CCLM 파라미터를 결정한 후, 목표 CCLM 파라미터에 의하여 진일보로 현재 블록의 인트라 예측 값을 결정할 수 있다.
본 출원에서 디코더는 현재 블록이 이용하는 목표 CCLM 파라미터를 결정한 후, 목표 CCLM 파라미터를 이용하여 진일보로 현재 블록의 인트라 예측 값을 결정할 수 있어, 현재 블록과 인트라 예측 값 간의 예측 차이값을 컴퓨팅할 수 있는 것을 이해할 것이다.
예시적으로, 본 출원의 실시예에서, 목표 CCLM 파라미터에 현재 블록이 인트라 예측할 때 이용하는 스케일 팩터와 오프셋 파라미터가 포함되기 때문에 디코더가 목표 CCLM 파라미터에 의하여 현재 블록의 인트라 예측 값을 결정할 때, 상술한 공식(1)을 통하여 인코딩 블록 중(다운 샘플링을 거친) 위치 좌표가  인 샘플링 포인트의 제1 픽처 컴포넌트 재구성 값
인 샘플링 포인트의 제1 픽처 컴포넌트 재구성 값 을 이용하여 인코딩 블록 중 위치 좌표가
을 이용하여 인코딩 블록 중 위치 좌표가  인 샘플링 포인트의 제2 픽처 컴포넌트 예측 값
인 샘플링 포인트의 제2 픽처 컴포넌트 예측 값 을 컴퓨팅하여 취득할 수 있다.
을 컴퓨팅하여 취득할 수 있다.
예시적으로 본 출원의 실시예에서, 디코더는 현재 블록의 인트라 예측 값을 결정한 후, 현재 블록의 픽셀 실제 값과 인트라 예측 값에 의하여 차이값 컴퓨팅을 계속하게 수행할 수 있으며, 컴퓨팅하여 취득된 차이값을 예측 차이값으로 하여 차후 예측 차이값에 대하여 변환 처리를 수행하기 편한다.
다시 말하면, 본 출원의 실시예에서, 디코더는 목표 CCLM 파라미터에 의하여 현재 블록의 인트라 예측 값을 결정할 때, 선형 모델을 이용하여 목표 CCLM 파라미터와 현재 블록의 제1 픽처 컴포넌트의 재구성 값에 의하여 현재 블록의 제2 픽처 컴포넌트의 예측 값을 컴퓨팅할 수 있다.
구체적으로, 본 출원에서, 제1 픽처 컴포넌트는 휘도 컴포넌트이며; 제2 픽처 컴포넌트는 채도 컴포넌트이다.
도6은 픽처 컴포넌트의 예측 방법의 구현 흐름 도면4로서, 도6에 도시된 보와 같이, 본 출원에서, 디코더는 비트 스트림을 분석하여 현재 블록의 예측 모드 파라미터를 결정한 후, 즉 단계 101 후, 디코더가 픽처 컴포넌트를 예측하는 방법에는 또한 다음과 같은 단계가 포함될 수 있다.
단계205, 예측 모드 파라미터가 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 지시할 때, 비트 스트림을 분석하여 현재 블록의 CCLM 모드 인덱스 파라미터를 결정하며; 여기에서, CCLM 모드 인덱스 파라미터는 현재 블록이 이용하는 CCLM 모드를 지시하고, CCLM 모드는 CCLM를 이용하여 인트라 예측 값을 결정하는 컴퓨팅 도출 방식을 지시한다.
본 출원의 실시예에서, 만일 예측 모드 파라미터가 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 지시하면, 디코더가 계속하게 비트 스트림을 분석하여 현재 블록의 CCLM 모드 인덱스 파라미터를 결정할 수 있다.
설명해야 할 바로는, 본 출원의 실시예에서, CCLM 모드 인덱스 파라미터는 현재 블록이 이용하는 CCLM 모드를 지시하고, CCLM 모드는 CCLM를 이용하여 인트라 예측 값을 결정하는 컴퓨팅 도출 방식을 지시한다.
다시 말하면, 본 출원에서, 디코더는 비트 스트림을 분석한 후, 먼저 현재 블록의 CCLM 모드 인덱스 파라미터를 결정할 수 있으며, 그 후 CCLM 모드 인덱스 파라미터를 이용하여 현재 블록이 이용하는 CCLM 모드를 결정할 수 있어, CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 컴퓨팅 도출 방식을 취득할 수 있게 한다.
본 출원의 실시예에서, CCLM 모드에 있어서, 구체적으로 다양한 다른 인트라 예측 모드가 포함될 수 있기 때문에 인코더는 다른 인덱스 파라미터를 이용하여 CCLM 모드 중의 다른 예측 모드에 대하여 보정과 구분을 수행해야 한다. 다시 말하면, 다른 CCLM 모드는 다른 CCLM 모드 인덱스 파라미터에 대응된다.
나아가, 본 출원에서, 디코더는 현재 블록이 CCLM를 이용하여 인트라 예측값을 결정하는 것을 결정한 후, CCLM 모드 인덱스 파라미터가 지시한 CCLM 모드에 의하여 현재 블록의 인트라 예측 값의 컴퓨팅 도출 방식을 결정할 수 있다.
본 출원의 실시예가 픽처 컴포넌트의 예측 방법을 제공하는 바, 디코더가 비트 스트림을 분석하여 현재 블록의 예측 모드 파라미터를 결정하며; 예측 모드 파라미터가 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 지시할 때, 비트 스트림을 분석하여 현재 블록의 CCLM 인덱스 값을 결정하며; CCLM 인덱스 값에 의하여 현재 블록의 목표 CCLM 파라미터를 결정하며; 여기에서, 목표 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며; 목표 CCLM 파라미터에 의하여 현재 블록의 인트라 예측 값을 결정한다. 이로부터 알 수 있는 바와 같이, 본 출원의 실시예에서, 인코더는 현재 블록이 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 결정할 때, 현재 블록과 인접된 포인트의 다중 그룹 참조점을 기반으로 대응되는 다중 그룹 CCLM 파라미터를 결정할 수 있고, 또한 다중 그룹 파라미터에서 최적화된 목표 CCLM 파라미터를 결정하며, 인코더가 목표 CCLM 파라미터를 이용한다고 지시하는 CCLM 인덱스 값을 비트 스트림에 기록하고 디코딩 측으로 전송할 수 있어, 디코더가 비트 스트림을 분석한 후 CCLM 인덱스 값을 취득하고 또한 CCLM ?덱스 값이 지시한 목표 CCLM 파라미터를 결정하게 하며, 목표 CCLM 파라미터를 이용하여 현재 블록의 인트라 예측 값을 결정할 수 있기 편한다. 다시 말하면, 본 출원의 제시된 픽처 컴포넌트의 예측 방법은 현재 블록의 다중 그룹 CCLM 파라미터 중의 목표 CCLM 파라미터를 비트 스트림에 기록하여 전달할 수 있어, 인코더/디코더가 목표 CCLM 파라미터에 의하여 현재 블록에 대하여 인트라 예측 처리를 수행하는 것을 결정하게 할 수 있으며, 인코딩/디코딩 처리의 복잡성을 크게 낮추고 인코딩/디코딩 효율을 향상시킨다.
상술한 실시예를 기반으로, 본 출원의 다른 일 실시예가 픽처 컴포넌트의 예측 방법을 제공하는 바, 해당 픽처 컴포넌트의 예측 방법은 인코더에 적용되며, 도7은 픽처 컴포넌트의 예측 방법의 구현 흐름 도면5로서, 도7에 도시된 바와 같이, 인코더가 픽처 컴포넌트를 예측하는 방법에는 다음과 같은 단계가 포함될 수 있다.
단계 301, 현재 블록이 CCLM를 이용하여 인트라 예측 값을 결정할 때, 현재 블록의 다중 그룹 참조점을 이용하여 다중 그룹 CCLM 파라미터를 컴퓨팅한다.
단계 302, 다중 그룹 CCLM 파라미터에 의하여 CCLM 파라미터 리스트를 구성한다.
단계 303, CCLM 파라미터 리스트에서 목표 CCLM 파라미터를 선택한다.
단계 304, 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정하고 비트 스트림에 기록하며; 여기에서, CCLM 인덱스 값은 목표 CCLM 파라미터를 이용하는 것을 지시한다.
본 출원의 실시예에서, 인코더가 비디오에 입력한 픽처를 하나 또는 다수 개의 CTU로 구분하며, 즉 픽처를 세크먼트로 구분하며, 선택적으로, 나아가 세크먼트를 하나 또는 다수 개의 브릭으로 구분하며, 여기에서, 세크먼트와 브릭 중의 각 하나에 하나 또는 다수 개의 완전한 CTU 및 일부 CTU 중 적어도 하나가 포함되고, 하나또는 다수 개의 슬라이스로 형성하며, 여기에서, 슬라이스에 픽처 중의 세크먼트의 래스터 순서에 처하는 하나 또는 다수 개의 세크먼트, 또는 픽처 중의 사각형 구역을 커버하는 하나 또는 다수 개의 세크먼트가 포함될 수 있고, 또한 하나 또는 다수 개의 서브 픽처를 형성할 수 있으며, 여기에서 서브 픽처에 하나 또는 다수 개의 슬라이스, 세크먼트 또는 브릭이 포함된다.
나아가, 본 출원의 실시예에서, 인코더는 계속하게 분할된 후의 CTU에 대하여 반복하게 4진 트리 분열, 2진수 분열 및 3진수 분열을 이용할 수 있어, 나아가 CTU를 더욱 작은 인코딩 유닛(CU)으로 나눈다. 운동 보상 유닛과 운동 추산 유닛은 CU의 인터 현재 블록을 취득하기 위한 것이다. 인트라 예측 유닛은 해당 비디오 인코딩 블록을 인코딩하고자 하는 인트라 예측 모드를 결정하며, MIP 모드가 포함되는 다양한 인트라 예측 모드를 이용하여 CU의 인트라 예측 블록을 취득할 수 있다. 예시에서, 레이트 왜곡 최적화의 운동 추산 방법은 운동 보상 유닛과 운동 추산 유닛에 의하여 호출되어 인터 현재 블록을 취득하고, 및 레이트 왜곡 최적화의 모드 결정 방법은 인트라 예측 유닛에 의하여 호출되어 인트라 예측 블록을 취득한다. 인트라 예측 유닛(103) 은 CCLM 모드(이의 모드 지수가 각각 INTRA_LT_CCLM, INTRA_L_CCLM 및 INTRA_T_CCLM 와 같은 인트라 예측 모드가 포함)가 인트라 예측 블록을 취득하는지 여부를 결정한다.
나아가, 본 출원의 실시예에서, 인코더는 인터 현재 블록과 인트라 예측 블록에서 현재 블록을 선택하고 또한 현재 블록을 전송할 수 있으며, 아울러 또한 선택된 현재 블록의 대응 모드의 모드 파라미터를 전송할 수 있다. 구체적으로, 현재 블록이 CCLM를 이용하여 인트라 예측 값을 결정할 때, 현재 블록의 다중 그룹 참조점을 이용하여 다중 그룹 CCLM 파라미터를 컴퓨팅할 수 있다. 여기에서, 다중 그룹 참조점에 현재 블록 인접한 픽셀 샘플링 포인트가 포함된다.
설명해야 할 바로는, 본 출원의 실시예에서, 선택된 현재 블록은 CCLM 모드를 이용하는 것을 통하여 취득될 때, 인트라 예측 블록을 취득할 때 이용되는 CCLM 모드 파라미터를 인코딩 유닛으로 전송할 수 있어, 여기에서, 만일 유연성 CCLM 참조를 가동시키면, CCLM 모드 파라미터에 CCLM 모드 인덱스 파라미터와 CCLM 인덱스 값이 포함된다.
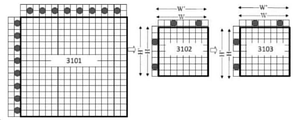
도8은 현재 블록의 참조점의 위치의 도면1이고, 도9는 현재 블록의 참조점의 위치의 도면2이고, 도10은 현재 블록의 참조점의 위치의 도면3이며, 도8 내지 도10은 각각 INTRA_LT_CCLM모드, INTRA_L_CCLM 모드 및 INTRA_T_CCLM 모드 하에서 현재 블록의 참조점의 위치를 취득하는 예시를 도시되며, 여기에서 참조점 위치는 블랙 도트로 표기된다. 블록 3101, 3201 및 3301에 현재 블록의 휘도 컴포넌트의 참조점이 포함되고, 블록 3102, 3202 및 3302에 현재 블록의 제1 채도 컴포넌트(예를 들면 Cb 또는 U 컴포넌트)의 참조점이 포함되고, 블록 3103, 3203 및 3303에 현재 블록의 제2 채도 컴포넌트(예를 들면 Cr 또는 V 컴포넌트)의 참조점이 포함된다.
나아가, 본 출원의 실시예에서, 인코더는 블록의 너비(W)와 높이(H)(도2A 내지 도2C에서 W(W')와 H(H')로 표기됨) 및 두 개의 파라미터(즉 시작 위치(s)와 스텝 사이즈(Δ))를 이용하여 참조점의 위치를 결정할 수 있다.
나아가, 본 출원의 실시예에서, 인코더는 Δ의 값을 컴퓨팅하여 Δ=L/(N/2)를 취득할 수 있으며, 여기에서, L는 현재 블록의 상측 인접한 위치 중 참조점의 수량을 지시하고, 또는 현재 블록의 좌측 인접한 위치 중 참조점의 수량이며; N은 참조점의 서브 세트를 구성하기를 기대하는 인접한 샘플의 수량을 지시한다. 인코더는 s의 값을 컴퓨팅하여 s=Δ/2를 취득한다.
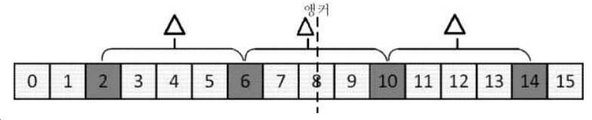
도11은 INTRA_T_CCLM 모드를 결정하는 참조점 위치의 도면으로서, 도11에 도시된 바와 같이, L가 16과 같고, N이 8과 같고 또한 참조점의 수량이 4과 같다고 가정하면, 인코더가 Δ를 컴퓨팅하여 Δ=L/(N/2)=16/(8/2)=4를 취득하고, 및 s를 컴퓨팅하여 s=Δ/2=4/2=2를 취득한다. 즉, 인코드가 참조점의 시작 위치가 도11 중의 샘플 위치2에 위치하는 것을 결정하고, 다음의 인접한 참조점 위치이 도달하는 스텝 사이즈가 4와 같다. 인코더가 샘? 위치 2, 6, 10 및 14로부터 참조점을 취득하여 참조점의 서브 세트를 형성한다.
설명해야 할 바로는, 본 출원의 실시예에서, 인코더가 취득된 참조점을 이용하여 취득한 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터, 즉 상술한 공식(1) 중의 스케일 팩터  와 오프셋 파라미터
와 오프셋 파라미터  가 포함될 수 있다.
가 포함될 수 있다.
나아가, 본 출원의 실시예에서, 인코더가 참조점의 위치를 변하는 것을 통하여 CCLM 파라미터( 와
와  )의 하나 또는 다수 개의 다른 값을 취득할 수 있어, 즉 인코더가 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정할 수 있다. 다중 그룹 위치를 이용하여 다른 CCLM 파라미터를 취득할 때, 인코더가 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터(예를 들면 레이트 왜곡 최적화의 모드 결정 방법을 이용함)를 선택할 수 있다.
)의 하나 또는 다수 개의 다른 값을 취득할 수 있어, 즉 인코더가 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정할 수 있다. 다중 그룹 위치를 이용하여 다른 CCLM 파라미터를 취득할 때, 인코더가 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터(예를 들면 레이트 왜곡 최적화의 모드 결정 방법을 이용함)를 선택할 수 있다.
설명해야 할 바로는, 본 출원의 실시예에서, 인코더는 문법의 설정을 통하여 목표 CCLM 파라미터에 대하여 지시를 수행하며, 아울러 또한 문법 설정을 통하여 다중 그룹 CCLM 파라미터를 허락할지 여부에 대하여 지시할 수 있다.
예시적으로, 본 출원에서, 표1은 CCLM의 문법1로서, 표1에 도시된 바와 같이, 인코더는 CCLM 인덱스 값(cclm_ref_index)의 설정을 통하여 목표 CCLM 파라미터를 지시할 수 있어, 즉 표1 중의 cclm_ref_index를 설정하여 목표 CCLM 파라미터를 지시한다.
| coding_unit( x0, y0, cbWidth, cbHeight, treeType ) { | Descriptor |
| ...... | |
| if( (IntraPredModeY[ x0 ][ y0] == INTRA_LT_CCLM) || (IntraPredModeY[ x0 ][ y0] == INTRA_L_CCLM) || (IntraPredModeY[ x0 ][ y0] == INTRA_T_CCLM) ) |
|
| CCLM_ref_index | ae(v) |
| ...... | |
| } |
예시적으로, 본 출원에서, 표2는 CCLM의 문법2로서, 도2에 도시된 바와 같이, 인코더는 cclm_multiple_ref_enable_flag를 설정하는 것을 통하여 다중 그룹 CCLM 파라미터를 허락할지 여부를 결정한다.
| ...... | Descriptor |
| CCLM_multiple_ref_enable_flag | u(1) |
| ..... |
나아가, 본 출원의 실시예에서, 인코더가 현재 블록의 다중 그룹 참조점을 취득한 후, 단계 301를 호출하여 다중 그룹 참조점을 이용하여 다중 그룹 CCLM 파라미터를 컴퓨팅할 수 있다. 그 후, 단계 302를 호출하여 다중 그룹 CCLM 파라미터에 의하여 CCLM 파라미터 리스트를 구성할 수 있다.
예시적으로, 본 출원에서, 표3은 CCLM의 문법3이고, 표3에 도시된 바와 같이, 인코더가 CCLM 파라미터 리스트 중의 CCLM 파라미터로 cclm_ref_index를 할당할 수 있어, 여기에서, CCLM 파라미터에는 스케일 팩터 와 오프셋 파라미터
와 오프셋 파라미터 가 포함된다.
가 포함된다.
| alpha[0] offset[0] |
alpha[1] offset[1] |
alpha[2] offset[2] |
...... | |
| cclm_ref_index | 0 | 1 | 2 | ...... |
나아가, 본 출원의 실시예에서, 인코더는 단계 303를 호출하여 CCLM 파라미터 리스트에서 목표 CCLM 파라미터를 선택할 수 있다.
예시적으로, 본 출원에서, 인코더가 CCLM 파라미터 리스트 중의 CCLM 파라미터에 대응되는 원가 값, 즉 레이트 왜곡 최적화 방법을 결정한 후 최적화 원가를 가진 CCLM 파라미터를 목표 CCLM 파라미터로 결정한다.
나아가, 본 출원의 실시예에서, 인코더는 단계 304를 호출하여, cclm_ref_index를 CCLM 파라미터 리스트 중의 목표 CCLM 파라미터과 같은 인덱스 순서 번호로 설정할 수 있다.
본 출원의 일 실시예에서, 나아가, 도12는 픽처 컴포넌트의 예측 방법의 구현 흐름 도면6으로서, 도12에 도시된 바와 같이, 인코더가 픽처 컴포넌트를 예측하는 방법에는 다음과 같은 단계가 포함될 수 있다.
단계 401, 현재 블록이 CCLM를 이용하여 인트라 예측 값을 결정할 때, 현재 블록의 다중 그룹 참조점을 이용하여 다중 그룹 CCLM 파라미터를 컴퓨팅한다.
단계 402, 다중 그룹 CCLM 파라미터에 의하여 목표 CCLM 파라미터를 결정한다.
단계 403, 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정하고 비트 스트림에 기록하며; 여기에서, CCLM 인덱스 값은 목표 CCLM 파라미터를 이용하는 것을 지시한다.
본 출원의 실시예에서, 현재 블록의 다중 그룹 CCLM 파라미터(즉 스케일 팩터와 오프셋 파라미터)는 현재 블록의 다중 그룹 참조점에 의하여 결정된 것이기 때문에 인코더가 또한 CCLM 파라미터를, 대응되는 s와 Δ를 통하여 참조점을 추출하는 위치로 표시할 수 있다.
예시적으로, 본 출원에서, 표4에 CCLM 모델의 참조 위치의 예시가 도시된다. 표4에 되시된 바와 같이, INTRA_LT_CCLM, INTRA_L_CCLM와 INTRA_T_CCLM는 세 개의 연속한 양의 정수일 수 있으며; IntraPredModeY[x0][y0]는 현재 블록의 상단 죄측 휘도 샘플의 위치가 픽처 또는 서브 픽처 중의(x0,y0)와 같은 상황 하에서, 현재 블록의 인트라 예측 모드를 지시하며; cclm_ref_index의 값은 다양한 s와 Δ파라미터에 대응되어 참조점을 결정한 후 CCLM 파라미터를 결정한다. 레이트 왜곡 최적화를 호출하는 과정에서, 참조점의 위치는 s=cclmRefPosition[x0][y0][IntraPredModeY[x0][y0]-INTRA_LT_CCLM][cclm_ref_index][0], 및 Δ=cclmRefPosition[x0][y0][IntraPredModeY[x0][y0]-INTRA_LT_CCLM][cclm_ref_index][1]로 표시될 수 있다.
| IntraPredModeY[ x0 ][ y0 ] | cclm_ref_index | CCLM Reference Position |
| INTRA_LT_CCLM | 0 | (s[0][0], delta[0][0]) |
| 1 | (s[0][1], delta[0][1]) | |
| 2 | (s[0][2], delta[0][2]) | |
| 3 | (s[0][3], delta[0][3]) | |
| ...... | ...... | |
| INTRA_L_CCLM | 0 | (s[1][0], delta[1][0]) |
| 1 | (s[1][1], delta[1][1]) | |
| ...... | ...... | |
| INTRA_T_CCLM | 0 | (s[2][0], delta[2][0]) |
| 1 | (s[2][1], delta[2][1]) | |
| 2 | (s[2][2], delta[2][2]) | |
| ...... | ...... |
나아가, 본 출원의 실시예에서, 인코더가 단계 401를 호출하여 다중 그룹 참조점의 s와 Δ를 이용하여 다중 그룹 참조 위치를 취득하며, 그 후 대응되는 다중 그룹 CCLM 파라미터를 컴퓨팅하여 취득한다. 인코더는 단계 402를 호출하여 예를 들면 단계 302와 단계303과 유사한 방법을 이용하여 최적화 CCLM 모드를 결정하게 한다. 마지막으로, 인코더는 cclm_ref_index를 목표 CCLM 파라미터와 같은 인덱스 순서 번호로 설정할 수 있다.
설명해야 할 바로는, 본 출원의 실시예에서, 다양한 CCLM 모드는 다른 수량의 후보 CCLM 파라미터를 가질 수 있다. 표4에 도시된 바와 같이, INTRA_LT_CCLM, INTRA_L_CCLM 및 INTRA_T_CCLM 이 세 개의 CCLM 모드에 대하여, s와 Δ가 표시하는 참조 위치의 서브 세트의 수량은 다를 수 있다.
설명해야 할 바로는, 본 출원의 실시예에서, 인코더가 CCLM 파라미터의 다수 개의 서브 세트를 이용하지 않는 것을 결정할 때, 기본 위치를 이용하여 참조점을 취득할 수 있다. 기본 위치의 예시는 도11 중의 예시이다.
나아가, 본 출원의 실시예에서, 인코더는 현재 블록의 인트라 예측 값에 의하여 잔여를 컴퓨팅하며, 예를 들면, 인코더가 분할된 후의 CU와 CU의 예측 블록 간의 차이, 즉 잔여 CU를 컴퓨팅한다. 인코더가 잔여 CU를 읽고 잔여 CU에 대하여 하나 또는 다수 개의 변환 조적을 실행하여 계수를 취득한다. 볼륨 인코더가 계수에 대하여 양자화를 수행하고 양자화 계수(즉 수준)를 출력한다.
나아가, 본 출원의 실시예에서, 인코더 중의 역양자화 유닛은 양자화 계수에 대하여 줌 조작을 수행하여 재구성 계수를 출력한다. 역변환 유닛은 변환 유닛 중의 변환에 대응되는 하나 또는 다수 개의 역변환을 수행하고 재구성 잔여를 출력한다. 가산기는 재구성 잔여와 예측 유닛으로부터 온 CU 예측 블록을 더하는 것을 통하여 재구성 CU를 컴퓨팅한다. 가산기는 또한 이의 출력을 예측 유닛으로 송신하여 인트라 예측 참조로 한다. 픽처 또는 서브 픽처 중의 모든 CU가 재구성된 후, 필터링 유닛은 재구성 픽처 또는 서브 픽처에 대하여 루프 필터링을 수행한다. 필터링 유닛에 하나 또는 다수 개의 필터, 예를 들면, 블록화 제거 필터링, 샘플링 포인트 대응형 오프셋(SAO) 필터, 대응형 루프 필터(ALF), 휘도 맵핑 및 채도 줌(LMCS) 필터 및 신경명을 기반으로 한 필터가 포함된다. 대체하게, 필터링 유닛은 CU가 기타 CU에 대하여 인코딩을 수행하는 참조로 하지 않을 것을 결정할 때, 필터링 유닛은 CU 중의 하나 또는 다수 개의 목표 픽셀에 대하여 루프 필터링을 수행한다.
필터링 유닛의 출력은 디코딩 픽처 또는 서브 픽처이고, 디코딩 픽처 또는 서브 픽처가 DPB(디코딩 픽처 버퍼)로 송신된다. DPB는 시간 순서와 제어 정보에 의하여 디코딩 픽처를 출력한다. DPB에 저장되는 픽처는 또한 예측 유닛이 인터 예측 또는 인트라 예측을 수행하는 참조로 할 수 있다.
엔트로피 코딩 유닛은 인코더 중으로부터 온 유닛의 파라미터(디코딩 픽처를 취득하는 데 필요한 것) 및 제어 파라미터와 보충 정보를 2진수로 전환하여 표시하고, 또한 각 데이터 유닛의 문법 구조에 의하여 이런 2진수 표시를 생성된 비디오 비트 스트림에 기록한다.
엔트로피 코딩 유닛은 표1 중의 cclm_ref_index를 비트 스트림 중 현재 블록에 대응되는 데이터 유닛에 인코딩하며, 여기 표1에서 ae(v)는 VVC WD에 자세히 설명된 ae(v)의 분석 프로세스에 해당하는 엔트로피 코딩 방법이다. 선택적으로, 인코더는 또한 인트라 예측 유닛을 통하여 CCLM 모드 파라미터를 결정할 때, 참조 위치의 다수 개의 서비 스트를 이용하는 것을 허락하는지 여부를 결정한다. 엔트로피 코딩 유닛은 표2 중의 문법 요소를 비트 스트림 중의 하나 또는 다수 개의 이어서의 데이터 유닛에 인코딩할 수 있으며, 문법 요서에 (비교적 높은 수준으로부터 비교적 낮은 수준으로) 시퀀스 수준 파라미터 세트(예를 들면 시퀀스 파라미터 세트(SPS)), 픽처 또는 서브 픽처 수준 파라미터 세트(예를 들면 픽처 파라미터 세트(PPS)), 대응형 파라미터 세트(APS), 슬라이스 헤더, 슬라이스 데이터 중의 세크먼트의 문법, 슬라이스 데이터 중의 브릭의 문법, 인토딩 트리 유닛(CTU)이 포함된다. 엔트로피 코딩 유닛은 u(1)를 이용하여 cclm_multiple_ref_enable_flag에 대하여 인코딩을 수행한다. u(1)는 VVC WD에 자세히 설명된 u(1)의 분석 프로세스에 해당하는 엔트로피 코딩 방법이다. 선택적으로, 비교적 낮은 수준 중의 cclm_multiple_ref_enable_flag는 비교적 높은 수준 중의 플래그를 재정의할 수 있다.
본 출원의 실시예가 픽처 컴포넌트의 예측 방법을 제공하는 바, 인코더는 현재 블록에서 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정할 때, 현재 블록의 다중 그룹의 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정하며; 여기에서, CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며; 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터를 결정하고, 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정하고 또한 비트 스트림에 기록하며; 여기에서, CCLM 인덱스 값은 목표 CCLM 파라미터를 이용하는 것을 지시하며; 목표 CCLM 파라미터에 의하여 현재 블록의 인트라 예측 값을 결정한다. 이로부터 알 수 있는 바와 같이, 본 출원의 실시예에서, 인코더는 현재 블록이 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 결정할 때, 현재 블록과 인접된 포인트의 다중 그룹 참조점을 기반으로 대응되는 다중 그룹 CCLM 파라미터를 결정할 수 있고, 또한 다중 그룹 파라미터에서 최적화된 목표 CCLM 파라미터를 결정하며, 인코더가 목표 CCLM 파라미터를 이용한다고 지시하는 CCLM 인덱스 값을 비트 스트림에 기록하고 디코딩 측으로 전송하여 디코더가 비트 스트림을 분석한 후 CCLM 인덱스 값을 취득하고 또한 CCLM ?덱스 값이 지시한 목표 CCLM 파라미터를 결정하게 하며, 목표 CCLM 파라미터를 이용하여 현재 블록의 인트라 예측 값을 결정할 수 있다. 다시 말하면, 본 출원의 제시된 픽처 컴포넌트의 예측 방법은 현재 블록의 다중 그룹 CCLM 파라미터 중의 목표 CCLM 파라미터를 비트 스트림에 기록하여 전달할 수 있어, 인코더/디코더가 목표 CCLM 파라미터에 의하여 현재 블록에 대하여 인트라 예측 처리를 수행하는 것을 결정하게 할 수 있으며, 인코딩/디코딩 처리의 복잡성을 크게 낮추고 인코딩/디코딩 효율을 향상시킨다.
상술한 실시예를 기반으로, 본 출원의 다른 일 실시예가 픽처 컴포넌트의 예측 방법을 제공하는 바, 해당 픽처 컴포넌트의 예측 방법은 디코더에 적용되며, 도13은 픽처 컴포넌트의 예측 방법의 구현 흐름 도면7로서, 도13에 도시된 바와 같이, 디코더가 픽처 컴포넌트를 예측하는 방법에는 다음과 같은 단계가 포함될 수 있다.
단계 501, 현재 블록은 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정할 때, 비트 스트림을 분석하여 현재 블록의 CCLM 인덱스 값을 결정한다.
단계 502, 현재 블록의 CCLM 파라미터 리스트를 구성한다.
단계 503, CCLM 인덱스 값에 의하여 CCLM 파라미터 리스트에서 목표 CCLM 파라미터를 선택한다.
본 출원의 실시예에서, 디코더의 입력 비트 스트림은 인코더에 의하여 생성된 비트 스트림, 즉 코드 스트림일 수 있다. 디코더의 분석 유닛은 입력 비트 스트림에 대하여 분석하고 입력 비트 스트림에서 문법 요소의 값을 취득한다. 디코더의 분석 유닛은 문법 요서의 2진수 표시를 수자 값으로 저환하고 수자 값을 디코더 중의 유닛으로 송신하여 하나 또는 다수 개의 디코딩 픽처를 취득한다. 디코더의 분석 유닛은 또한 입력 비트 스트림에서 하나 또는 다수 개의 문법 요소를 분석하여 디코딩 픽처를 디스플레이한다.
나아가, 본 출원의 실시예에서, 디코더의 분석 유닛은 하나 또는 다수 개의 문법 요소를 취득할 수 있으며, 해당 하나 또는 다수 개의 문법 요소가 현재 블록(즉 현재 블록)의 참조점 위치를 지시한다.
예시적으로, 본 출원에서, 디코더의 분석 유닛은 입력 비트 스트림 중의 데이터 유닛으로부터 cclm_ref_index를 취득할 수 있어, 여기에서 데이터 유닛은 슬라이스 헤드, 파라미터 세트, 슬라이스 데이터, 보충 향상된 정보 메시지 등 중의 적어도 하나일 수 있다.
구체적으로, 본 출원에서, 입력 비트 스트림 중의 CCLM 인덱스 값(cclm_ref_index)의 문법 구조는 상술한 표1에 도시된 바와 같다. 디코더의 분석 유닛은 ae(v)에 대응되는 엔트로피 코딩 방법을 이용하여 비트 스트림 중의 2진수 표시를 cclm_ref_index의 수자 값으로 전환한다.
본 출원의 실시예에서, 디코더가 먼저 비트 스트림을 분석하여 현재 블록의 예측 모드 파라미터를 결정할 수 있는 것을 이해할 것이다.
예시적으로, 본 출원에서, cclm_ref_index에 대하여 분석하기 전 디코더의 분석 유닛은 먼저 유연성 참조점 위치가 CCLM 모드에 이용되는 것을 허락하는지 여부를 지시하는 문법 요소의 값을 취득할 수 있다. 예를 들면, 디코더의 분석 유닛은 현재 블록이 포함되는 슬라이스와 직접 또는 간접적으로 관련된 활동 파라미터 세트에서 해당 문법 요소를 취득하며, 예를 들면 예측 모드 파라미터를 칭하는 cclm_multiple_ref_enable_flag이다. 만일 cclm_multiple_ref_enable_flag는 1과 같으면, 만일 CCLM 모드는 비트 스트림에서 현재 블록에 대하여 디코딩을 수행하는 인트라 예측 모드를 지시하면, 디코더의 분석 유닛은 현재 블록의 인코딩 비트에서 cclm_ref_index를 취득할 수 있다. 그리고, 만일 cclm_multiple_ref_enable_flag는 0과 같으면, 입력 비트 스트림 중의 현재 블록의 일부에서 cclm_ref_index가 존재하지 않으며, CCLM 모드는 현재 블록에 대하여 디코딩을 수행하는데 이용되지 않기 때문이다.
예시적으로, 본 출원에서, 상술한 표2는 하나 또는 다수 개의 데이터 유닛 중의 cclm_multiple_ref_enable_flag의 문법 구조를 표시하며, 데이터 유닛에는, 예를 들면 파라미터 세트, 슬라이스 헤더, 슬라이스 데이터, CTU 및 보충 향상된 정보 메시지, 입력 비트 스트림이 포함된다. 디코더의 분석 유닛은 u(1)에 대응되는 엔트로피 코딩 방법을 이용하여 비트 스트림 중의 2진수 표시를 cclm_multiple_ref_enable_flag의 수자 값으로 전환한다. 인코더와 유사하며, 비교적 낮은 수준 중의 cclm_multiple_ref_enable_flag는 비교적 높은 수준 중의 플래그를 재정의할 수 있다.
나아가, 본 출원의 실시에에서, 디코더의 분석 유닛은 cclm_ref_index 및 하나 또는 다수 개의 디코딩 픽처를 취득하는 기타 문법 요소를 디코더 중의 예측 유닛으로 송신하여 현재 블록(예를 들면 CU)의 예측 블록을 결정한다. 인터 디코딩 모드가 현재 블록에 대하여 디코딩을 수행하는 것을 지시할 때, 예측 유닛은 디코더의 분석 유닛으로부터 온 상대 파라미터를 MC 유닛으로 전송하여 인터 예측 블록을 취득한다. 인트라 예측 모드(CCLM 인트라 예측 모드가 포함될 수 있음)가 현재 블록에 대하여 디코딩을 수행하는 것을 지시할 때, 예측 유닛은 디코더의 분석 유닛으로부터 온 상대 파라미터를 인트라 예측 유닛으로 전송하여 인트라 예측 블록을 취득한다.
나아가, 본 출원의 실시예에서, 디코더가 CCLM 인트라 예측 모드를 이용하는 것을 결정할 때, 인트라 예측 유닛은 도8 내지 도10에 도시된 바와 같은 유형의 CCLM 모드를 이용하여 현재 블록의 예측 블록을 취득한다. 디코더 중의 인트라 예측 블록의 취득 과정은 인코더 중의 과정과 유사한다. 인트라 예측 유닛은 cclm_ref_index에 의하여 지시된 참조점 위치를 취득하고, 인코더의 인트라 예측 유닛의 컴퓨팅 방식과 같은 방식으로 CCLM 파리미터를 컴퓨팅하며, 마지막으로 상술한 공식(1)에 도시된 선형 모델을 이용하여 현재 블록의 인트라 예측 블록을 컴퓨팅한다.
본 출원의 실시예에서, 단계 501에서 디코더의 분석 유닛은 입력 비트 스트림으로부터 CCLM 인덱스 값(cclm_ref_index)을 취득하는 것을 수행한다. 다중 그룹 참조점의 하나 또는 하나 이상의 서브 세트를 취득한 후, 인트라 예측 유닛은 단계 502를 호출하여 서브 세트를 이용하여 다중 그룹 참조점에 대응되는 다중 그룹 CCLM 파라미터를 컴퓨팅하며, 다중 그룹 CCLM 파라미터를 컴퓨팅할 때 서브 세트의 순서와 각 서브 세트 중의 참조점의 위치는, 인코더의 인트라 예측 유닛이 이용하는 순서와 위치와 같고, 인트라 예측 유닛은 단계 502를 호출하여 CCLM 파라미터 리스트를 구성한다.
예시적으로, 본 출원에서, 표3에 도시된 바와 같이, 인코더는 또한 CCLM 파라미터 리스트 중의 CCLM 파라미터로 지수를 할당할 수 있어, 여기에서, CCLM 파라미터에는 스케일 팩터와 오프셋 파라미터가 포함된다. 인트라 예측 유닛은 단계 503을 호출하여 CCLM 파라미터 리스트에서 이의 인덱스 순서 번호가 cclm_ref_index의 값과 같은 목표 CCLM 파라미터(목표 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함됨)를 선택한다.
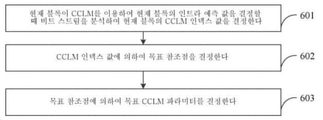
본 출원의 일 실시예에서, 나아가, 도14는 픽처 컴포넌트의 예측 방법의 구현 흐름 도면8로서, 도14에 도시된 바와 같이, 디코더가 픽처 컴포넌트를 예측하는 방법에는 다음과 같은 단계가 포함될 수 있다.
단계 601, 현재 블록이 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정할 때, 비트 스트림을 분석하여 현재 블록의 CCLM 인덱스 값을 결정한다.
단계 602, CCLM 인덱스 값에 의하여 목표 참조점을 결정한다.
단계 603, 목표 참조점에 의하여 목표 CCLM 파라미터를 결정한다.
본 출원의 실시예에서, 현재 블록의 다중 그룹 CCLM 파라미터(즉 스케일 팩터와 오프셋 파라미터)는 현재 블록의 다중 그룹 참조점에 의하여 결정된 것이기 때문에 디코더가 또한 CCLM 파라미터를, 대응되는 s와 Δ를 통하여 참조점을 추출하는 위치로 표시할 수 있다.
예시적으로, 본 출원에서, 표4에 되시된 바와 같이, INTRA_LT_CCLM, INTRA_L_CCLM와 INTRA_T_CCLM는 세 개의 연속한 양의 정수일 수 있으며; IntraPredModeY[x0][y0]는 현재 블록의 상단 죄측 휘도 샘플의 위치가 픽처 또는 서브 픽처(x0,y0)와 같은 상황 하에서, 현재 블록의 인트라 예측 모드를 지시하며; cclm_ref_index의 값은 다양한 s와 Δ파라미터에 대응되어 참조점을 결정한 후 CCLM 파라미터를 결정한다. 호출되는 레이트 왜곡 최적화 과정에서, 참조점의 위치는 s=cclmRefPosition[x0][y0][IntraPredModeY[x0][y0]-INTRA_LT_CCLM][cclm_ref_index][0], 및 Δ=cclmRefPosition[x0][y0][IntraPredModeY[x0][y0]-INTRA_LT_CCLM][cclm_ref_index][1]로 표시될 수 있다.
본 출원의 실시예에서, 단계 601은 디코더의 분석 유닛에 의하여 수행되어 입력 비트 스트림으로부터 (cclm_ref_index를 취득한다. 인트라 예측 유닛은 단계 602를 호출하여 cclm_ref_index로 목표 참조점을 취득하며, 표4 중의 예시적 구조에 도시된 바와 같이, 현재 블록 및 이의 상단 좌측 휘도 샘플(x0, y0)에 대하여, 인트라 예측 유닛은 목표 참조점을 결정하고, s=cclmRefPosition[x0][y0] [IntraPredModeY[x0][y0]- INTRA_LT_CCLM][cclm_ref_index][0] 및 Δ=CCLMRefPosition[x0][y0][IntraPredModeY[x0][y0]-INTRA_LT_CCLM] [cclm_ref_index][1]를 취득한다. 인트라 예측 유닛은 단계 603을 호출하여 목표 참조점의 위치를 결정하며, 그 후 현재 블록에 대하여 디코딩을 수행하는 스케일 팩터와 오프셋 파라미터가 포함되는 목표 CCLM 파라미터를 컴퓨팅한다.
설명해야 할 바로는, 본 출원의 실시예에서, 다양한 CCLM 모드는 다른 수량의 후보 CCLM 파라미터를 가질 수 있다. 표4에 도시된 바와 같이, INTRA_LT_CCLM, INTRA_L_CCLM 및 INTRA_T_CCLM 이 세 개의 CCLM 모드에 대하여, s와 Δ에 의하여 표시된 참조 위치의 서브 세트의 수량은 다를 수 있다.
본 출원에서, 디코더의 줌 유닛은 인코더 중의 역양자화 유닛의 기능과 같은 기능을 갖는 것을 이해할 것이다. 디코더의 줌 유닛은 디코더의 분석 유닛으로부터 온 양자화 계수(즉 수준)에 대하여 줌 조작을 수행하여 재구성 계수를 취득한다. 디코더의 변환 유닛은 인코더 중의 역변환 유닛의 기능과 같은 기능을 갖다. 디코더의 변환 유닛은 하나 또는 다수 개의 변환 조작(즉 인코더 중의 역변환 유닛이 수행한 하나 또는 다수 개의 변환 조작의 역조작을 통함)을 수행하여 재구성 잔여를 취득한다. 디코더의 가산기는 이의 입력(예측 유닛으로부터 온 현재 블록과 디코더의 졈환 유닛으로부터 온 재구성 잔여)에 대하여 더셈을 수행하여 현재 블록의 재구성 블록을 취득한다. 재구성 블록은 또한 예측 유닛으로 송신되어 인트라 예측 모드 하에서 인코딩하는 기타 블록의 참조로 한다.
픽처 또는 서브 픽처 중의 모든 CU가 재구성된 후, 필터링 유닛은 재구성 픽처 또는 서브 픽처에 대하여 루프 필터링을 수행한다. 터링 유닛에 하나 또는 다수 개의 필터, 예를 들면, 블록화 제거 필터링, 샘플링 포인트 대응형 오프셋(SAO) 필터, 대응형 루프 필터(ALF), 휘도 맵핑 및 채도 줌(LMCS) 필터 및 신경명을 기반으로 한 필터가 포함된다. 대체하게, 필터링 유닛은 재구성 블록이 기타 블록에 대하여 디코딩을 수행하는 참조로 하지 않을 것을 결정할 때, 필터링 유닛은 재구성 블록 중의 하나 또는 다수 개의 목표 픽셀에 대하여 루프 필터링을 수행한다.
필터링 유닛의 출력은 디코딩 픽처 또는 서브 픽처이고, 디코딩 픽처 또는 서브 픽처가 DPB(디코딩 픽처 버퍼)로 송신된다. DPB는 시간 순서와 제어 정보에 의하여 디코딩 픽처를 출력한다. DPB에 저장되는 픽처는 또한 예측 유닛을 통하여 하여 인터 예측 또는 인트라 예측을 수행하는 참조로 할 수 있다.
본 출원의 실시예가 픽처 컴포넌트의 예측 방법을 제공하는 바, 디코더가 비트 스트림을 분석하여 현재 블록의 예측 모드 파라미터를 결정하며; 예측 모드 파라미터가 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 지시할 때, 비트 스트림을 분석하여 현재 블록의 CCLM 인덱스 값을 결정하며; CCLM 인덱스 값에 의하여 현재 블록의 목표 CCLM 파라미터를 결정하며; 여기에서, 목표 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며; 목표 CCLM 파라미터에 의하여 현재 블록의 인트라 예측 값을 결정한다. 이로부터 알 수 있는 바와 같이, 본 출원의 실시예에서, 인코더는 현재 블록이 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 결정할 때, 현재 블록과 인접된 포인트의 다중 그룹 참조점을 기반으로 대응되는 다중 그룹 CCLM 파라미터를 결정할 수 있고, 또한 다중 그룹 파라미터에서 최적화된 목표 CCLM 파라미터를 결정하며, 인코더가 목표 CCLM 파라미터를 이용한다고 지시하는 CCLM 인덱스 값을 비트 스트림에 기록하고 디코딩 측으로 전송하여 디코더가 비트 스트림을 분석한 후 CCLM 인덱스 값을 취득하고 또한 CCLM 인덱스 값이 지시한 목표 CCLM 파라미터를 결정하게 하며, 목표 CCLM 파라미터를 이용하여 현재 블록의 인트라 예측 값을 결정할 수 있다. 다시 말하면, 본 출원의 제시된 픽처 컴포넌트의 예측 방법은 현재 블록의 다중 그룹 CCLM 파라미터 중의 목표 CCLM 파라미터를 비트 스트림에 기록하여 전달할 수 있어, 인코더/디코더가 목표 CCLM 파라미터에 의하여 현재 블록에 대하여 인트라 예측 처리를 수행하는 것을 결정하게 할 수 있으며, 인코딩/디코딩 처리의 복잡성을 크게 낮추고 인코딩/디코딩 효율을 향상시킨다.
상술한 실시예를 기반으로, 본 출원의 다른 일 실시예에서, 도15는 송신 장치의 구성 구조 도면으로서, 도15에 도시된 바와 같이, 송신 장치(500)에는 취득 유닛(501), 인코더(300) 및 저정/송신 유닛(502)가 포함될 수 있다.
취득 유닛(501)은 비디오 신호를 취득하고 비디오 신호를 인코딩(300)로 전송한다. 취득 유닛(501)에는 하나 또는 다수 개의 카메라(딥 카메라)가 포함되는 장치일 수 있다. 취득 유닛(501)은 비트 스트림에 대하여 일부 또는 전부 디코딩을 수행하여 비디오의 장치를 취득한다. 취득 유닛(501)에는 또한 하나 또는 다수 개의 소자가 포함되어 음성 신호를 캡처한다. 인코더(300)의 실시예는 인코딩이고, 취득 유닛(501)으로부터 온 이의 입력 비디오로 하는 비디오 신호에 대하여 인코딩을 수행하고 비디오 비트 스트림을 생성한다. 인코더(300)에는 또한 하나 또는 다수 개의 음성 인코더가 포함되어 음성 신호에 대하여 인코딩을 수행하여 음성 비트 스트림을 생성한다. 저장/송신 유닛(502)은 인코더(300)로부터 비디오 비트 스트림을 수신한다. 저장/수신 유닛(502)은 또한 인코더(300)로부터 음성 비트 스트림을 수신하고 비디오 비트 스트림과 음성 비트 스트림을 함계 압축하여 미디어 파일(예를 들면 ISO를 기반으로 한 미디어 파일 포맷) 또는 전송 흐름으로 형성한다. 선택적으로, 저장/송신 유닛(502)은 미디어 파일 또는 전송 흐름을 저장 유닛, 예를 들면 하드디스크, DVD 디스크, 클라우드, 형대용 저장 장치에 기록한다. 선택적으로, 저장/송신 유닛(502)은 비트 스트림을 전송 네트워크, 예를 들면 인터넷, 유선 네트워크, 셀룰로오스 네트워크, 무선 와이파이 등로 전송한다.
도16은 목표 장치의 구성 구조 도면으로서, 도16에 도시된 바와 같이, 목표 장치(600)에는 수신 유닛 (601), 인코더 (300) 및 렌더링 유닛 (602)가 포함될 수 있다.
수신 유닛(601)은 네트워크로부터 미디어 파일 또는 전송 흐름을 수신하거나 또는 저장 장치로부터 미디오 파일 또는 전송 흐름을 읽는다. 수신 유닛(601)은 미디어 파일 또는 전송 흐름으로부터 온 비디오 비트 스트림과 음성 비트 스트림을 나눈다. 송신 유닛(601)은 또한 비디오 비트 스트림을 추출하는 것을 통하여 새 비디오 비트 스트림을 생성할 수 있다. 수신 유닛(601)은 또한 음성 비트 스트림을 추출하는 것을 통하여 새 음성 비트 스트림을 생성한다. 인코더(300)는 수신 유닛(601)으로부터 온 비디오 비트 스트림과 음성 비트 스트림에 대하여 인코딩을 수행하여 디코딩 비디오 및 하나 또는 다수 개의 사운드트랙에 대응되는 하나 또는 다수 개의 디코딩 음성을 취득한다. 렌더링 유닛(602)은 재구성 비디오에 대하여 조작을 수행하고, 디스플레이하도록 적합한다. 이러한 조작에는 감지 품질을 향상시키는 조작, 즉 소음 감소, 합성, 컬러 공간의 전환, 업 샘플링, 다운 샘플링 등 중 하나 또는 다수 개가 포함할 수 있다. 렌더링 유닛(602)은 또한 디코딩 음성에 대하여 조작을 수행하고, 디스플레이하는 음성 신호의 감지 품질을 향상시킨다.
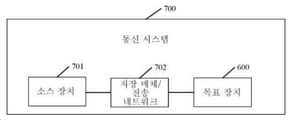
도17은 통신 시스템의 구성 구조 도면으로, 도17에 도시된 바와 같이, 통신 시스템(700)에는 소스 장치(701), 저장 매체/전송 네트워크(702) 및 목표 장치(600)가 포함될 수 있다.
소스 장치(701)는 송신 장치(500)일 수 있고, 저장/송신 유닛(502)의 입력은 저장 매체/전송 네트워크(702)에 의하여 처리되어 비트 스트림을 저장 또는 전송한다. 목표 장치(600) 중의 수신 유닛(601)은 저장 매체/전송 네트워크(702)로부터 비트 스트림을 취득한다. 수신 유닛(601)은 미디어 파일 또는 전송 흐름으로부터 새 비디오 비트 스트림을 추출할 수 있다. 수신 유닛(601)은 또한 미디어 파일 또는 전송 흐름으로부터 새 음성 비트 스트림을 추출할 수 있다.
상술한 공개된 바와 같이, 공개된 방법과 장치가 다중 그룹 CCLM 파라미터(즉 선형 모델 파라미터, 스케일 팩터 및 오프셋 파라미터)를 이용하고 참조 위치 지수를 CU 데이터로 전송하여 CCLM 모드 파라미터를 결정한다. 실시예에서 두 가지 방법을 제공한다. 제1 가지 방법은 다수 개의 후보 CCLM 파라미터 리스트가 포함되는 것을 구성하는 데 이용된다. 이용하고자 하는 후보 CCLM 파라미터의 지수를 CU 데이터로 전송하는 것을 지시한다. 제2 가지 방법은 CCLM 블록의 참조 위치를 전달하는 데 이용되며, CCLM 파라미터는 참조 위치의 샘플을 이용하는 것을 통하여 컴퓨팅되기 때문이다. 본 VVC 설계에서, 참조점 위치는 시작점(s)과 인접된 샘플 간의 스텝 사이즈(Δ)를 통하여 결정될 수 있기 때문에 참조 위치 지수가 CU 데이터로 전달되어 참조점 위치를 포지셔닝하는 s와 Δ 값을 지시하며, 참조점 위치는 참조점을 추출한 후 CCLM 모드 파라미터를 결정한다.
상술 실시예를 기반으로, 본 출원의 또 다른 일 실시예에서, 도18은 인코딩의 구성 구조 도면1로서, 도18에 도시된 바와 같이, 본 출원의 실시예가 제시하는 인코딩(300)에 제1 결정 부분(301), 설정 부분(302)이 포함될 수 있으며,
상기 제1 결정 부분(301)은, 현재 블록이 CCLM를 이용하여 상기 현재 블록의 인트라 예측 값을 결정할 때, 상기 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정하도록 구성되며; 여기에서, 상기 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며; 및 상기 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터를 결정하도록 구성되며;
상기 설정 부분(302)은, 상기 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정하고 비트 스트림에 기록하며; 여기에서, 상기 CCLM 인덱스 값은 상기 목표 CCLM 파라미터를 이용하는 것을 지시하며;
상기 제1 결정 부분(301)은, 또한 상기 목표 CCLM 파라미터에 의하여 상기 현재 블록의 인트라 예측 값을 결정하도록 구성된다.
나아가, 본 출원의 실시예에서, 상기 제1 결정 부분(301)은 구체적으로 상기 다중 그룹 참조점에 상기 현재 블록과 인접된 픽셀 샘플링이 포함되되며; 상기 다중 그룹 참조점 중의 한 그룹 참조점을 이용하여 상기 한 그룹 참조점에 대응되는 한 그룹 CCLM 파라미터를 컴퓨팅하며; 상기 다중 그룹 참조점을 순회하고, 상기 다중 그룹 CCLM 파라미터를 결정하도록 구성된다.
나아가, 본 출원의 실시예에서, 상기 제1 결정 부분(301)은 또한 구체적으로 레이트 왜곡 최적화의 방법을 이용하여 상기 다중 그룹 CCLM 파라미터에서 목표 비용 함수 최적값에 대응되는 한 그룹 CCLM 파라미터를 선택하고, 상기 목표 CCLM 파라미터를 결정하도록 구성된다.
나아가, 본 출원의 실시예에서, 상기 설정 부분(302)은 구체적으로 상기 CCLM 인덱스 값을 상기 목표 CCLM 파라미터의 상기 다중 그룹 CCLM 파라미터 중에서의 대응되는 인덱스 순서 번호로 설정하며; 상기 CCLM 인덱스 값을 비트 스트림에 기록하도록 구성된다.
나아가, 본 출원의 실시예에서, 상기 제1 결정 부분(301)은 또한 상기 다중 그룹 참조점 중의 각 그룹 참조점의 위치 정보를 결정하며; 상기 각 그룹 참조점의 위치 정보에 의하여 상기 다중 그룹 CCLM 파라미터 중의 각 그룹 CCLM 파라미터의 인덱스 순서 번호를 결정하도록 구성된다.
나아가, 본 출원의 실시예에서, 상기 제1 결정 부분(301)은 또한 구체적으로 상기 각 그룹 참조점의 위치 정보에 의하여 상기 다중 그룹 참조점과 상기 현재 블록 간의 다수 개의 거리 파라미터를 결정하며; 상기 거리 파라미터의 작은 것으로부터 큰 것으로의 순서로 순차적으로 상기 다중 그룹 CCLM 파라미터 중의 각 그룹 CCLM 파라미터의 인덱스 순서 번호를 설정하도록 구성된다.
나아가, 본 출원의 실시예에서, 상기 설정 부분(302)은 또한 구체적으로 상기 CCLM 인덱스 값을 상기 비트 스트림 중 상기 현재 블록 인코딩 데이터가 포함되는 데이터 유닛에 기록하도록 구성된다.
나아가, 본 출원의 실시예에서, 상기 제1 결정 부분(301)은 또한 구체적으로 선형 모델을 이용하고 상기 목표 CCLM 파라미터와 상기 현재 블록의 제1 픽처 컴포넌트의 재구성 값에 의하여 상기 현재 블록의 제2 픽처 컴포넌트의 예측 값을 컴퓨팅하도록 구성된다.
나아가, 본 출원의 실시예에서, 상기 제1 픽처 컴포넌트는 휘도 컴포넌트이며; 상기 제2 픽처 컴포넌트는 채도 컴포넌트이다.
나아가, 본 출원의 실시예에서, 상기 제1 결정 부분(301)은 또한 구체적으로 CCLM 모드 인덱스 파라미터를 결정하며; 여기에서, CCLM 모드 인덱스 파라미터는 상기 현재 블록이 이용하는 CCLM 모드를 지시하고, 상기 CCLM 모드는 CCLM를 이용하여 상기 인트라 예측 값을 결정하는 컴퓨팅 도출 방식을 지시하며; 상기 CCLM 모드 인덱스 파라미터를 비트 스트림에 기록하도록 구성된다.
나아가, 본 출원의 실시예에서, 상기 설정 부분(302)은 또한 상기 현재 블록이 CCLM를 이용하여 상기 현재 블록의 인트라 예측 값을 결정할 때, 상기 현재 블록의 예측 모드 파라미터를 설정하고 비트 스트림에 기록하도록 구성된다.
도19는 인코더의 구성 구조 도면2로서, 도19에 도시된 바와 같이, 본 출원의 실시예가 제시하는 인코더(300)에는 또한 제1 프로세서(303), 제1 프로세서(303)가 실행할 수 있는 명령을 저장하는 제1 기억장치(304), 제1 통신 인터페이스(305)와 제1 프로세서(303), 제1 기억장치(304) 및 제1 통신 인터페이스(305)에 연결되는 제1 버스(306)가 포함된다.
나아가, 본 출원의 실시예에서, 상술한 제1 프로세서(303)는 현재 블록에서 CCLM를 이용하여 상기 현재 블록의 인트라 예측 값을 결정할 때, 상기 현재 블록의 다중 그룹의 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정하며; 여기에서, 상기 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며; 상기 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터를 결정하고, 상기 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정하고 또한 비트 스트림에 기록하며; 여기에서, 상기 CCLM 인덱스 값은 상기 목표 CCLM 파라미터를 이용하는 것을 지시하며; 상기 목표 CCLM 파라미터에 의하여 상기 현재 블록의 인트라 예측 값을 결정한다.
그리고, 본 실시예 중의 각 기능 모듈은 하나의 처리 유닛 중에 집적될 수도 있고, 또한 각 유닛이 독립적인 물리적으로 존재할 수 있으며, 또한 두 개 또는 두 개 이상의 유닛이 하나의 유닛에 집적되어 있을 수 있다. 상술한 집적된 유닛은 하드웨어의 형식으로 구현될 수도 있고, 또한 소프트웨어 기능 모듈의 형식으로 구현될 수도 있다.
만일 집적된 유닛은 소프트웨어 기능 모듈의 형식으로 구현되고 또한 독립적인 제품이 아님으로 판매 또는 사용될 때, 하나의 컴퓨터 판독가능한 저장 매체에 저장할 수 있어, 이를 기반으로 본 실시예의 기술방안의 본질적이나 또는 종래 기술에 대하여 공헌이 있는 부분 또는 해당 기술방안의 전부 또는 일부는 소프트웨어 제품의 형식으로 구현될 수 있고, 해당 컴퓨터 소프트웨어 제품은 하나의 저장 매체에 저장될 수 있는 바, 일부 명령이 포함되어 한 컴퓨터 설비(개인용 컴퓨터, 서버 또는 네트워크 설비 등일 수 있음) 또는 프로세서 (processor)로 하여금 본 출원의 각 실시예의 방법의 전부 또는 일부 단계를 구현하게 할 수 있다. 전술된 저장 매체에는 USB 메모리, 이동 하드, 읽기전용 메모리(ReadOnly Memory,), 무작위 접속 메모리(Random Access Memory, RAM), 자기 디스크 또는 광 디스크 등 여러 가지 프로그램 코드를 저장할 수 있는 매체가 포함된다.
본 출원의 실시예가 픽처 인코더를 제공하는 바, 해당 인코더는 현재 블록에서 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정할 때, 현재 블록의 다중 그룹의 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정하며; 여기에서, CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며; 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터를 결정하고, 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정하고 또한 비트 스트림에 기록하며; 여기에서, CCLM 인덱스 값은 목표 CCLM 파라미터를 이용하는 것을 지시하며; 목표 CCLM 파라미터에 의하여 현재 블록의 인트라 예측 값을 결정한다. 이로부터 알 수 있는 바와 같이, 본 출원의 실시예에서, 인코더는 현재 블록이 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 결정할 때, 현재 블록과 인접된 포인트의 다중 그룹 참조점을 기반으로 대응되는 다중 그룹 CCLM 파라미터를 결정할 수 있고, 또한 다중 그룹 파라미터에서 최적화된 목표 CCLM 파라미터를 결정하며, 인코더가 목표 CCLM 파라미터를 이용한다고 지시하는 CCLM 인덱스 값을 비트 스트림에 기록하고 디코딩 측으로 전송하여 디코더가 비트 스트림을 분석한 후 CCLM 인덱스 값을 취득하고 또한 CCLM 인덱스 값이 지시한 목표 CCLM 파라미터를 결정하게 하며, 목표 CCLM 파라미터를 이용하여 현재 블록의 인트라 예측 값을 결정할 수 있다. 다시 말하면, 본 출원의 제시된 픽처 컴포넌트의 예측 방법은 현재 블록의 다중 그룹 CCLM 파라미터 중의 목표 CCLM 파라미터를 비트 스트림에 기록하여 전달할 수 있어, 인코더/디코더가 목표 CCLM 파라미터에 의하여 현재 블록에 대하여 인트라 예측 처리를 수행하는 것을 결정하게 할 수 있으며, 인코딩/디코딩 처리의 복잡성을 크게 낮추고 인코딩/디코딩 효율을 향상시킨다.
상술 실시예를 기반으로, 본 출원의 다른 일 실시예에서, 도20은 디코딩의 구성 구조 도면1로서, 도20에 도시된 바와 같이, 본 출원의 실시예가 제시하는 디코딩(400)에 분석 부분(401), 제2 결정 부분(402)이 포함될 수 있으며,
상기 해석 부분(401)은, 비트 스트림을 본석하도록 구성되며;
상기 제2 결정 부분(402)은, 상기 현재 블록의 예측 모드 파라미터를 결정하도록 구성되며;
상기 분석 부분(401)은, 또한 상기 예측 모드 파라미터가 CCLM를 이용하여 상기 현재 블록의 인트라 예측 값을 결정하는 것을 지시할 때, 상기 비트 스트림을 분석하도록 구성되며;
상기 제2 결정 부분(402)은, 또한 상기 현재 블록의 CCLM 인덱스 값을 결정하며; 및 상기 CCLM 인덱스 값에 의하여, 상기 현재 블록의 목표 CCLM 파라미터를 결정하며; 여기에서, 상기 목표 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며; 및 상기 목표 CCLM 파라미터에 의하여 상기 현재 블록의 인트라 예측 값을 결정하도록 구성된다.
나아가, 본 출원의 실시예에서, 상기 제2 결정 부분(402)은 구체적으로 상기 CCLM 인덱스 값에 의하여 상기 현재 블록의 목표 참조점을 결정하며; 상기 목표 참조점은 상기 현재 블록과 인접된 하나 또는 다수 개의 픽셀 샘플링 포인트이며; 상기 목표 참조점에 의하여 상기 현재 블록의 목표 CCLM 파라미터를 결정하도록 구성된다.
나아가, 본 출원의 실시예에서, 상기 제2 결정 부분(402)은 또한 구체적으로 상기 CCLM 인덱스 값이 지시한 인덱스 순서 번호에 의하여 상기 현재 블록의 다중 그룹 참조점에서, 상기 목표 참조점을 결정하도록 구성되며; 여기에서, 상기 다중 그룹 참조점 중의 각 그룹 참조점에 상기 현재 블록과 인접된 하나 또는 다수 개의 미리 설정된 위치의 픽셀 샘플링 포인트가 포함된다.
나아가, 본 출원의 실시예에서, 상기 제2 결정 부분(402)은 또한 구체적으로 상기 다중 그룹 참조점 중의 각 그룹 참조점의 위치 정보를 결정하며; 상기 각 그룹 참조점의 위치 정보에 의하여 상기 다중 그룹 참조점과 상기 현재 블록 간의 다수 개의 거리 파라미터를 결정하며; 상기 거리 파아미터의 작은 것으로부터 큰 것으로의 순서로 순차적으로 상기 다중 그룹 참조점 중의 각 그룹 참조점의 위치 인덱스 순서 번호를 설정하며; 상기 다중 그룹 참조점에서, 위치 인덱스 순서 번호와 상기 CCLM 인덱스 값이 지시한 인덱스 순서 번호가 같은 한 그룹 참조점을 선택하여 상기 목표 참조점으로 하도록 구성된다.
나아가, 본 출원의 실시예에서, 상기 제2 결정 부분(402)은 또한 구체적으로 상기 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정하며; 여기에서, 상기 다중 그룹 참조점 중의 각 그룹 참조점에 상기 현재 블록과 인접된 하나 또는 또는 다수 개의 미리 설정된 위치의 픽셀 샘플링 포인트가 포함되며; 상기 다중 그룹 CCLM 파라미터 중의 상기 CCLM 인덱스 값이 지시한 한 그룹 CCLM 파라미터를 상기 목표 CCLM 파라미터로 하도록 구성된다.
나아가, 본 출원의 실시예에서, 상기 제2 결정 부분(402)은, 또한 구체적으로 상기 다중 그룹 참조점 중의 각 그룹 참조점의 위치 정보를 결정하며; 각 그룹 참조점의 위치 정보에 의하여 상기 다중 그룹 참조점과 상기 현재 블록 간의 다수 개의 거리 파라미터를 결정하며; 상기 거리 파아미터의 작은 것으로부터 큰 것으로의 순서로 순차적으로 상기 다중 그룹 CCLM 파라미터 중의 각 그룹 CCLM 파라미터의 인덱스 순서 번호를 설정하며; 상기CCLM 파라미터 중의 인덱스 순서 번호와 상기 CCLM 인덱스 값이 지시한 인덱스 순서 번호가 같은 한 그룹 CCLM 파라미터를 목표 CCLM 파라미터로 하도록 구성된다.
나아가, 본 출원의 실시예에서, 상기 제2 결정 부분(402)은 또한 구체적으로 선형 모델을 이용하고 상기 목표 CCLM 파라미터와 상기 현재 블록의 제1 픽처 컴포넌트의 재구성 값에 의하여 상기 현재 블록의 제2 픽처 컴포넌트의 예측 값을 컴퓨팅하도록 구성된다.
나아가, 본 출원의 실시예에서, 상기 제1 픽처 컴포넌트는 휘도 컴포넌트이며; 상기 제2 픽처 컴포넌트는 채도 컴포넌트이다.
나아가, 본 출원의 실시예에서, 상기 분석 부분(401)은, 또한 상기 비트 스트림을 분석하여 상기 현재 블록의 예측 모드 파라미터를 결정한 후 상기 예측 모드 파라미터가 CCLM를 이용하여 상기 현재 블록의 인트라 예측 값을 결정하는 것을 지시할 때, 상기 비트 스트림을 분석하도록 구성되며;
상기 제2 결정 부분(402)은, 또한 상기 현재 블록의 CCLM 모드 인덱스 파라미터를 결정하도록 구성되며; 여기에서, 상기 CCLM 모드 인덱스 파라미터는 상기 현재 블록이 이용하는 CCLM 모드를 지시하고, 상기 CCLM 모드는 CCLM를 이용하여 상기 인트라 예측 값을 결정하는 컴퓨팅 도출 방식을 지시한다.
도21은 인코더의 구성 구조 도면2로서, 도21에 도시된 바와 같이, 본 출원의 실시예가 제시하는 디코더(400)에는 또한 제2 프로세서(403), 제2 프로세서(403)가 실행가능한 명령을 저장하는 제2 기억장치(404), 제2 통신 인터페이스(405) 및 제2 프로세서(403), 제2 기억장치(404) 및 제2 통신 인터페이스(405)에 연결되는 제2 버스(406)가 포함된다.
나아가, 본 출원의 실시예에서, 상술한 제2 프로세서(403)는, 비트 스트림을 분석하여 상기 현재 블록의 예측 모드 파라미터를 결정하며; 상기 예측 모드 파라미터가 CCLM를 이용하여 상기 현재 블록의 인트라 예측 값을 결정하는 것을 지시할 때, 상기 비트 스트림을 분석하여 상기 현재 블록의 CCLM 인덱스 값을 결정하며; 상기 CCLM 인덱스 값에 의하여 상기 현재 블록의 목표 CCLM 파라미터를 결정하며; 여기에서, 상기 목표 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며; 상기 목표 CCLM 파라미터에 의하여 상기 현재 블록의 인트라 예측 값을 결정한다.
그리고, 본 실시예 중의 각 기능 모듈은 하나의 처리 유닛 중에 집적될 수도 있고, 또한 각 유닛이 독립적인 물리적으로 존재할 수 있으며, 또한 두 개 또는 두 개 이상의 유닛이 하나의 유닛에 집적되어 있을 수 있다. 상술힌 집적된 유닛은 하드웨어의 형식으로 구현될 수도 있고, 또한 소프트웨어 기능 모듈의 형식으로 구현될 수도 있다.
만일 집적된 유닛은 소프트웨어 기능 모듈의 형식으로 구현되고 또한 독립적인 제품이 아님으로 판매 또는 사용될 때, 하나의 컴퓨터 판독가능한 저장 매체에 저장할 수 있어, 이를 기반으로 본 실시예의 기술방안의 본질적이나 또는 종래 기술에 대하여 공헌이 있는 부분 또는 해당 기술방안의 전부 또는 일부는 소프트웨어 제품의 형식으로 구현될 수 있고, 해당 컴퓨터 소프트웨어 제품은 하나의 저장 매체에 저장될 수 있는 바, 일부 명령이 포함되어 한 컴퓨터 설비(개인용 컴퓨터, 서버 또는 네트워크 설비 등일 수 있음) 또는 processor(프로세서)로 하여금 본 출원의 각 실시예의 방법의 전부 또는 일부 단계를 구현하게 할 수 있다. 전술 저장 매체에는 USB 메모리, 이동 하드, 읽기전용 메모리(ReadOnly Memory,), 무작위 접속 메모리(Random Access Memory, RAM), 자기 디스크 또는 광 디스크 등 여러 가지 프로그램 코드를 저장할 수 있는 매체가 포함된다.
본 출원의 실시예가 픽처 디코더를 제공하는 바, 해당 디코더가 비트 스트림을 분석하여 현재 블록의 예측 모드 파라미터를 결정하며; 예측 모드 파라미터가 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 지시할 때, 비트 스트림을 분석하여 현재 블록의 CCLM 인덱스 값을 결정하며; CCLM 인덱스 값에 의하여 현재 블록의 목표 CCLM 파라미터를 결정하며; 여기에서, 목표 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며; 목표 CCLM 파라미터에 의하여 현재 블록의 인트라 예측 값을 결정한다. 이로부터 알 수 있는 바와 같이, 본 출원의 실시예에서, 인코더는 현재 블록이 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 결정할 때, 현재 블록과 인접된 포인트의 다중 그룹 참조점을 기반으로 대응되는 다중 그룹 CCLM 파라미터를 결정할 수 있고, 또한 다중 그룹 파라미터에서 최적화된 목표 CCLM 파라미터를 결정하며, 인코더가 목표 CCLM 파라미터를 이용한다고 지시하는 CCLM 인덱스 값을 비트 스트림에 기록하고 디코딩 측으로 전송하여 디코더가 비트 스트림을 분석한 후 CCLM 인덱스 값을 취득하고 또한 CCLM 인덱스 값이 지시한 목표 CCLM 파라미터를 결정하도록 하며, 목표 CCLM 파라미터를 이용하여 현재 블록의 인트라 예측 값을 결정할 수 있다. 다시 말하면, 본 출원의 제시된 픽처 컴포넌트의 예측 방법은 현재 블록의 다중 그룹 CCLM 파라미터 중의 목표 CCLM 파라미터를 비트 스트림에 기록하여 전달할 수 있어, 인코더/디코더가 목표 CCLM 파라미터에 의하여 현재 블록에 대하여 인트라 예측 처리를 수행하는 것을 결정하게 할 수 있으며, 인코딩/디코딩 처리의 복잡성을 크게 낮추고 인코딩/디코딩 효율을 향상시킨다.
본 출원의 실시예가 컴퓨터 판독가능 저장 매체를 제공하는 바, 이에 프로그램을 저장하고 있어, 해당 프로그램은 프로세서가 실행할 때, 위에 실시예가 설명한 방법을 구현한다.
구체적으로 말하면, 본 실시예 중의 한 가지 픽처 컴포넌트의 예측 방법에 대응되는 프로그램 명령은 광 디스크, 하드웨어 디스크, U 디스크 등 저장 매체에 저장될 수 있고, 저장 매체 중의 한 가지 픽처 컴포넌트의 예측 방법에 대응되는 프로그램 명령은 전자 장치에 의하여 읽히거나 실행될 때, 다음과 같은 단계가 포함된다.
현재 블록은 CCLM를 이용하여 상기 현재 블록의 인트라 예측 값을 결정할 때, 상기 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정하며; 여기에서, 상기 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며;
상기 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터를 결정하고, 상기 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정하고 비트 스트림에 기록하며; 여기에서, 상기 CCLM 인덱스 값은 상기 목표 CCLM 파라미터를 이용하는 것을 지시하며;
상기 목표 CCLM파라미터에 의하여 상기 현재 블록의 인트라 예측 값을 결정한다.
구체적으로 말하면, 본 실시예 중의 한 가지 픽처 컴포넌트의 예측 방법에 대응되는 프로그램 명령은 광 디스크, 하드웨어 디스크, U 디스크 등 저장 매체에 저장될 수 있고, 저장 매체 중의 한 가지 픽처 컴포넌트의 예측 방법에 대응되는 프로그램 명령은 전자 장치에 의하여 읽히거나 실행될 때, 다음과 같은 단계가 포함된다.
비트 스트림을 분석하여 상기 현재 블록의 예측 모드 파라미터를 결정하며;
상기 예측 모드 파라미터가 CCLM를 이용하여 상기 현재 블록의 인트라 예측 값을 결정하는 것을 지시할 때, 상기 비트 스트림을 분석하여 상기 현재 블록의 CCLM 인덱스 값을 결정하며;
상기 CCLM 인덱스 값에 의하여, 상기 현재 블록의 목표 CCLM 파라미터를 결정하며; 여기에서, 상기 목표 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며;
상기 목표 CCLM 파라미터에 의하여 상기 현재 블록의 인트라 예측 값을 결정한다.
당업계의 기술자들은 본 출원의 실시예가 방법, 시스템, 또는 컴퓨터 프로그램 제품을 제공할 수 있는 것을 이해할 것이다. 그로므로, 본 출원은 하드웨어 실시예, 소프트웨어 실시예, 또는 하드웨어와 소프트웨어 방면을 결합시킨 실시예의 형식을 이용할 수 있다. 그리고, 본 출원은 하나 또는 다수 개의 그 중에 컴퓨터 사용가능한 프로그램 코드가 포함되는 컴퓨터 사용가능한 저장 매체(자기 디스크 기억장치와 광학 기억장치가 포함되나 이에 제한되지 않음)에서 실시하는 컴퓨터 프로그램 제품의 형식을 이용할 수 있다.
본 출원은 본 출원의 실시예의 방법, 장치(시스템), 및 컴퓨터 프로그램 제품의 구현 흐름 예시도 및 블록도 중 적어도 하나에 의하여 설명한 것이다. 컴퓨터 프로그램 명령은 흐름 예시도 및 블록도 중 적어도 하나의 각 흐름 및 블록 중 적어도 하나를 구현할 수 있고, 및 흐름 예시도 및 블록도 중 적어도 하나의 흐름 및 블록 중 적어도 하나의 결합을 구현할 수 있음을 이해할 것이다. 이러한 컴퓨터 프로그램 명령을 범용 컴퓨터, 전용 컴퓨터, 삽입형 프로세서 또는 기타 프로그램 가능한 데이터 처리 장치의 프로세서에 제공하여 하나의 기계를 생성하여, 범용 컴퓨터 또는 기타 프로그램 가능한 데이터 처리 장치의 프로세서를 통하여 실행되는 명령이 흐름도의 한 흐름 또는 다수 개의 흐름 및 블럭도 중 적어도 하나의 하나의 블럭 또는 다수 개의 블럭 중의 지정된 기능을 구현하기 위한 장치를 생성할 수 있다.
이러한 컴퓨터 프로그램 명령은 또한 컴퓨터 또는 기타 프로그램 가능한 데이터 처리 장치를 도출하여 특정 방식으로 작동할 수 있는 컴퓨터 판독가능한 기억장치에 저장되어, 해당 컴퓨터 판독가능한 기억장치에 저장된 명령이 명령 장치를 포함하는 제조품을 생성하도록 하고, 해당 명령 장치는 흐름도의 한 흐름 또는 다수 개의 흐름 및 블럭도 중 적어도 하나의 하나의 블럭 또는 다수 개의 블럭 중의 지정된 기능을 구현할 수 있다.
이러한 컴퓨터 프로그램 명령은 또한 컴퓨터 또는 기타 프로그램 가능한 데이터 처리 장치에 베어링되어, 컴퓨터 또는 기타 프로그램 가능한 장치 상에서 일련의 조주작 단계를 실행하여 컴퓨터 구현가능한 처리를 생성하여, 컴퓨터 또는 기타 프로그램 가능한 장치 상에서 실행하되는 명령이 흐름도의 한 흐름 또는 다수 개의 흐름 및 블럭도 중 적어도 하나의 하나의 블럭 또는 다수 개의 블럭 중의 지정된 기능을 구현하는 단계를 제공하게 된다.
이상은 단지 본 출?의 바람직한 실시예일 뿐 본 출원의 보호 범위에 대하여 제한하는 것이 아니다.
본 출원의 실시예가 픽처 컴포넌트의 예측 방법, 인코더, 디코더 및 저장 매체를 제공하는 바, 인코더는 현재 블록이 CCLM를 사용하여 현재 블록의 인트라 예측 값을 결정할 때, 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정하며; 여기에서, CCLM 파라미터에 스케일 팩터와 오프셋 파라미터를 포함되며; 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터를 결정하며, 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정하고 비트 스트림에 기록하며; 여기에서, CCLM 인덱스 값은 목표 CCLM 파라미터를 이용하는 것을 지시하며; 목표 CCLM 파라미터에 의하여 현재 블록의 인트라 예측 값을 결정한다. 디코더가 비트 스트림을 분석하여 현재 블록의 예측 모드 파라미터를 결정하며; 예측 모드 파라미터가 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 지시할 때, 비트 스트림을 분석하여 현재 블록의 CCLM 인덱스 값을 결정하며; CCLM 인덱스 값에 의하여, 현재 블록의 목표 CCLM 파라미터를 결정하며; 여기에서, 목표 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며; 목표 CCLM 파라미터에 의하여 현재 블록의 인트라 예측 값을 결정한다. 이로부터 알 수 있는 바와 같이, 본 출원의 실시예에서, 인코더는 현재 블록이 CCLM를 이용하여 현재 블록의 인트라 예측 값을 결정하는 것을 결정할 때, 현재 블록과 인접된 포인트의 다중 그룹 참조점을 기반으로 대응되는 다중 그룹 CCLM 파라미터를 결정할 수 있고, 또한 다중 그룹CCLM 파라미터에서 최적화된 목표 CCLM 파라미터를 결정하며, 인코더가 목표 CCLM 파라미터를 이용한다고 지시하는 CCLM 인덱스 값을 비트 스트림에 기록하고 디코딩 측으로 전송하여 디코더가 비트 스트림을 분석한 후 CCLM 인덱스 값을 취득하고 또한 CCLM 인덱스 값이 지시한 목표 CCLM 파라미터를 결정하게 하며, 목표 CCLM 파라미터를 이용하여 현재 블록의 인트라 예측 값을 결정할 수 있다. 다시 말하면, 본 출원의 제시된 픽처 컴포넌트의 예측 방법은 현재 블록의 다중 그룹 CCLM 파라미터 중의 목표 CCLM 파라미터를 비트 스트림에 기록하여 전달할 수 있어, 인코더/디코더가 목표 CCLM 파라미터에 의하여 현재 블록에 대하여 인트라 예측 처리를 수행하는 것을 결정하게 할 수 있으며, 인코딩/디코딩 처리의 복잡성을 크게 낮추고 인코딩/디코딩 효율을 향상시킨다.
Claims (25)
- 픽처 컴포넌트의 예측 방법에 있어서,
인코더에 적용되며, 상기 방법에는,
현재 블록이 크로스-컴포넌트 선형 모델 예측(Cross-component Linear Model Prediction,CCLM)을 이용하여 상기 현재 블록의 인트라 예측 값을 결정할 때, 상기 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정하며; 상기 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며;
상기 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터를 결정하고, 상기 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정하고 비트 스트림에 기록하며; 상기 CCLM 인덱스 값은 상기 목표 CCLM 파라미터를 이용하는 것을 지시하며;
상기 목표 CCLM 파라미터에 의하여 상기 현재 블록의 인트라 예측 값을 결정하는 것이 포함되는 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 제1항에 있어서,
상기 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정하는 것에는,
상기 다중 그룹 참조점에 상기 현재 블록 인접한 픽셀 샘플링 포인트가 포함되며;
상기 다중 그룹 참조점 중의 한 그룹 참조점을 이용하여 상기 한 그룹 참조점에 대응되는 한 그룹 CCLM 파라미터를 컴퓨팅하며;
상기 다중 그룹 참조점을 순회하여 상기 다중 그룹 CCLM 파라미터를 결정하는 것이 포함되는 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 제1항에 있어서,
상기 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터를 결정하는 것에는,
레이트 왜곡 최적화의 방법을 이용하고, 상기 다중 그룹 CCLM 파라미터에서 목표 비용 함수 최적값에 대응되는 한 그룹 CCLM 파라미터를 선택하여 상기 목표 CCLM 파라미터로 결정하는 것이 포함되는 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 제1항에 있어서,
상기 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정하고 비트 스트림에 기록하는 것에는,
상기 CCLM 인덱스 값을 상기 목표 CCLM 파라미터의 상기 다중 그룹 CCLM 파라미터 중에서의 대응되는 인덱스 순서 번호로 설정하며;
상기 CCLM 인덱스 값을 비트 스트림에 기록하는 것이 포함되는 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 제4항에 있어서,
상기 방법에는 또한,
상기 다중 그룹 참조점 중의 각 그룹 참조점의 위치 정보를 결정하며;
상기 각 그룹 참조점의 위치 정보에 의하여 상기 다중 그룹 CCLM 파라미터 중의 각 그룹 CCLM 파라미터의 인덱스 순서 번호를 결정하는 것이 포함되는 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 제5항에 있어서,
상기 각 그룹 참조점의 위치 정보에 의하여 상기 다중 그룹 CCLM 파라미터 중의 각 그룹 CCLM 파라미터의 인덱스 순서 번호를 결정하는 것에는,
상기 각 그룹 참조점의 위치 정보에 의하여 상기 다중 그룹 참조점과 상기 현재 블록 간의 다수 개의 거리 파라미터를 결정하며;
상기 거리 파라미터의 작은 것으로부터 큰 것으로의 순서로 순차적으로 상기 다중 그룹 CCLM 파라미터 중의 각 그룹 CCLM 파라미터의 인덱스 순서 번호를 설정하는 것이 포함되는 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 제4항에 있어서,
상기 CCLM 인덱스 값을 비트 스트림에 기록하는 것에는
상기 CCLM 인덱스 값을 상기 비트 스트림 중 상기 현재 블록 인코딩 데이터가 포함되는 데이터 유닛에 기록하는 것이 포함되는 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 제1항에 있어서,
상기 목표 CCLM 파라미터에 의하여 상기 현재 블록의 인트라 예측 값을 결정하는 것에는
선형 모델을 이용하고, 상기 목표 CCLM 파라미터와 상기 현재 블록의 제1 픽처 컴포넌트의 재구성 값에 의하여 상기 현재 블록의 제2 픽처 컴포넌트의 예측 값을 컴퓨팅하는 것이 포함되는 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 제8항에 있어서,
상기 제1 픽처 컴포넌트는 휘도 컴포넌트이며; 상기 제2 픽처 컴포넌트는 채도 컴포넌트인 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 제1항에 있어서,
상기 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정하기 전, 상기 방법에는 또한
CCLM 모드 인덱스 파라미터를 결정하며; 상기 CCLM 모드 인덱스 파라미터는 상기 현재 블록이 이용하는 CCLM 모드를 지시하고, 상기 CCLM 모드는 CCLM를 이용하여 상기 인트라 예측 값을 결정하는 컴퓨팅 도출 방식을 지시하며;
상기 CCLM 모드 인덱스 파라미터를 비트 스트림에 기록하는 것이 포함되는 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 제1항에 있어서,
상기 방법에는 또한,
상기 현재 블록이 CCLM를 이용하여 상기 현재 블록의 인트라 예측 값을 결정할 때, 상기 현재 블록의 예측 모드 파라미터를 설정하고 비트 스트림에 기록하는 것이 포함되는 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 픽처 컴포넌트의 예측 방법에 있어서,
디코더에 적용되며, 상기 방법에는,
비트 스트림을 분석하여 현재 블록의 예측 모드 파라미터를 결정하며;
상기 예측 모드 파라미터가 CCLM를 이용하여 상기 현재 블록의 인트라 예측 값을 결정하는 것을 지시할 때, 상기 비트 스트림을 분석하여 상기 현재 블록의 CCLM 인덱스 값을 결정하며;
상기 CCLM 인덱스 값에 의하여, 상기 현재 블록의 목표 CCLM 파라미터를 결정하며; 상기 목표 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며;
상기 목표 CCLM 파라미터에 의하여 상기 현재 블록의 인트라 예측 값을 결정하는 것이 포함되는 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 제12항에 있어서,
상기 CCLM 인덱스 값에 의하여 상기 현재 블록의 목표 CCLM 파라미터를 결정하는 것에는,
상기 CCLM 인덱스 값에 의하여 상기 현재 블록의 목표 참조점을 결정하며; 상기 목표 참조점은 상기 현재 블록 인접한 하나 또는 다수 개의 픽셀 샘플링 포인트이며;
상기 목표 참조점에 의하여 상기 현재 블록의 목표 CCLM 파라미터를 결정하는 것이 포함되는 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 제13항에 있어서,
상기 CCLM 인덱스 값에 의하여 상기 현재 블록의 목표 참조점을 결정하는 것에는,
상기 CCLM 인덱스 값이 지시한 인덱스 순서 번호에 의하여 상기 현재 블록의 다중 그룹 참조점에서, 상기 목표 참조점을 결정하며; 상기 다중 그룹 참조점 중의 각 그룹 참조점에 상기 현재 블록과 인접된 하나 또는 다수 개의 미리 설정된 위치의 픽셀 샘플링 포인트가 포함되는 것이 포함되는 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 제14항에 있어서,
상기 CCLM 인덱스 값에 의하여 상기 현재 블록의 다중 그룹 참조점에서 상기 목표 참조점을 결정하는 것에는,
상기 다중 그룹 참조점 중의 각 그룹 참조점의 위치 정보를 결정하며;
상기 각 그룹 참조점의 위치 정보에 의하여 상기 다중 그룹 참조점과 상기 현재 블록 간의 다수 개의 거리 파라미터를 결정하며;
상기 거리 파라미터의 작은 것으로부터 큰 것으로의 순서로 순차적으로 상기 다중 그룹 참조점 중의 각 그룹 참조점의 위치 인덱스 순서 번호를 설정하며;
상기 다중 그룹 참조점에서 위치 인덱스 순서 번호와 상기 CCLM 인덱스 값이 지시하는 인덱스 순서 번호가 같은 한 그룹 참조점을 선택하여 상기 목표 첨조점으로 하는 것이 포함되는 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 제12항에 있어서,
상기 CCLM 인덱스 값에 의하여 상기 현재 블록의 목표 CCLM 파라미터를 결정하는 것에는,
상기 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정하며; 상기 다중 그룹 참조점 중의 각 그룹 참조점에 상기 현재 블록과 인접된 하나 또는 다수 개의 미리 설정된 위치의 픽셀 샘플링 포인트가 포함되며;
상기 다중 그룹 CCLM 파라미터 중의 상기 CCLM 인덱스 값이 지시하는 한 그룹 CCLM 파라미터를 상기 목표 CCLM 파라미터로 하는 것이 포함되는 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 제16항에 있어서,
상기 다중 그룹 CCLM 파라미터 중의 상기 CCLM 인덱스 값이 지시하는 한 그룹 CCLM 파라미터를 상기 목표 CCLM 파라미터로 하는 것에는,
상기 다중 그룹 참조점 중의 각 그룹 참조점의 위치 정보를 결정하며;
상기 각 그룹 참조점의 위치 정보에 의하여 상기 다중 그룹 참조점과 상기 현재 블록 간의 다수 개의 거리 파라미터를 결정하며;
상기 거리 파라미터의 작은 것으로부터 큰 것으로의 순서로 순차적으로 상기 다중 그룹 CCLM 파라미터 중의 각 그룹 CCLM 파라미터의 인덱스 순서 번호를 결정하며;
상기 CCLM 파라미터 중의 인덱스 순서 번호와 상기 CCLM 인덱스 값이 지시하는 인덱스 순서 번호가 같은 한 그룹 CCLM 파라미터를 상기 목표 CCLM 파라미터로 하는 것이 포함되는 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 제12항에 있어서,
상기 목표 CCLM 파라미터에 의하여 상기 현재 블록의 인트라 예측 값을 결정하는 것에는,
선형 모델을 이용하고 상기 목표 CCLM 파라미터와 상기 현재 블록의 제1 픽처 컴포넌트의 재구성 값에 의하여 상기 현재 블록의 제2 픽처 컴포넌트의 예측 값을 컴퓨팅하는 것이 포함되는 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 제18항에 있어서,
상기 제1 픽처 컴포넌트는 휘도 컴포넌트이며; 상기 제2 픽처 컴포넌트는 채도 컴포넌트인 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 제12항에 있어서,
상기 비트 스트림을 분석하여, 상기 현재 블록의 예측 모드 파라미터를 결정한 후, 상기 방법에는 또한,
상기 예측 모드 파라미터가 CCLM를 이용하여 상기 현재 블록의 인트라 예측값을 결정하는 것을 지시할 때, 상기 비트 스트림을 분석하여 상기 현재 블록의 CCLM 모드 인덱스 파라미터를 결정하며; 상기 CCLM 모드 인덱스 파라미터는 상기 현재 블록이 이용하는 CCLM 모드를 지시하고, 상기 CCLM 모드는 CCLM를 이용하여 상기 인트라 예측 값을 결정하는 컴퓨팅 도출 방식을 지시하는 것이 포함되는 것을 특징으로 하는 픽처 컴포넌트의 예측 방법. - 인코더에 있어서,
상기 인코더에는, 제1 결정 부분 및 설정 부분이 포함되는 바,
상기 제1 결정 부분은, 현재 블록이 CCLM를 이용하여 상기 현재 블록의 인트라 예측 값을 결정할 때, 상기 현재 블록의 다중 그룹 참조점을 이용하여 대응되는 다중 그룹 CCLM 파라미터를 결정하며; 상기 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며; 및 상기 다중 그룹 CCLM 파라미터에서 목표 CCLM 파라미터를 결정하도록 구성되며;
상기 설정 부분은, 상기 목표 CCLM 파라미터에 의하여 CCLM 인덱스 값을 설정하고 비트 스트림에 기록하도록 구성되며; 여기에서, 상기 CCLM 인덱스 값은 상기 목표 CCLM 파라미터를 이용하는 것을 지시하며;
상기 제1 결정 부분은, 또한 상기 목표 CCLM 파라미터에 의하여 상기 현재 블록의 인트라 예측 값을 결정하도록 구성되는 것이 포함되는 것을 특징으로 하는 인코더. - 인코더에 있어서,
상기 인코더에는 제1 프로세서, 상기 제1 프로세서가 실행할 수 있는 명령을 저장하는 제1 기억장치가 포함되며, 상기 명령이 실행될 때, 상기 제1 프로세서가 실행할 때 제1항 내지 제11항 중 어느 한 항의 상기 방법을 구현하는 것을 특징으로 하는 인코더. - 디코더에 있어서,
상기 디코더에는 분석 부분 및 제2 결정 부분이 포함되는 바,
상기 분석 부분은, 비트 스트림을 분석하도록 구성되며;
상기 제2 결정 부분은, 상기 현재 블록의 예측 모드 파라미터를 결정하도록 구성되며;
상기 분석 부분은, 또한 상기 예측 모드 파라미터가 CCLM를 이용하여 상기 현재 블록의 인트라 예측 값을 결정하는 것을 지시할 때, 상기 비트 스트림을 분석하도록 구성되며;
상기 제2 결정 부분은, 또한 상기 현재 블록의 CCLM 인덱스를 결정하며; 및 상기 CCLM 인덱스 값에 의하여, 상기 현재 블록의 목표 CCLM 파라미터를 결정하며; 상기 목표 CCLM 파라미터에 스케일 팩터와 오프셋 파라미터가 포함되며; 및 상기 목표 CCLM 파라미터에 의하여 상기 현재 블록의 인트라 예측 값을 결정하도록 구성되는 것을 특징으로 하는 디코더. - 디코더에 있어서,
상기 디코더에는 제2 프로세서, 상기 제2 프로세서 실행가능한 명령을 저장하는 제2 기억장치가 포함되며, 상기 명령은 실행될 때, 상기 제2 프로세서에 의하여 실행될 때 제12항 내지 제20항 중 어느 한 항의 상기 방법을 구현하는 것을 특징으로 하는 디코더. - 컴퓨터 저장 매체에 있어서,
상기 컴퓨터 저장 매체가 컴퓨터 프로그램을 저장하고, 상기 컴퓨터 프로그램이 제1 프로세서에 의하여 실행될 때, 제1항 내지 제11항 중 어느 한 항의 상기 방법을 구현하거나, 또는 제2 프로세서에 의하여 실행될 때 제12항 내지 제20항 중 어느 한 항의 상기 방법을 구현하는 것을 특징으로 하는 컴퓨터 저장 매체.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201962872694P | 2019-07-10 | 2019-07-10 | |
| US62/872,694 | 2019-07-10 | ||
| PCT/CN2020/090644 WO2021004152A1 (zh) | 2019-07-10 | 2020-05-15 | 图像分量的预测方法、编码器、解码器以及存储介质 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20220030950A true KR20220030950A (ko) | 2022-03-11 |
Family
ID=74113535
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020217042910A KR20220030950A (ko) | 2019-07-10 | 2020-05-15 | 픽처 컴포넌트의 예측 방법, 인코더, 디코더 및 저장 매체 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20220116591A1 (ko) |
| EP (1) | EP3972251A4 (ko) |
| JP (1) | JP2022539786A (ko) |
| KR (1) | KR20220030950A (ko) |
| CN (1) | CN114041288A (ko) |
| WO (1) | WO2021004152A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023204624A1 (ko) * | 2022-04-20 | 2023-10-26 | 엘지전자 주식회사 | Cccm(convolutional cross-component model) 예측에 기반한 영상 부호화/복호화 방법, 장치 및 비트스트림을 저장하는 기록 매체 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11765376B2 (en) * | 2020-10-08 | 2023-09-19 | Tencent America LLC | Pruning methods and apparatuses for neural network based video coding |
| CN115190312A (zh) * | 2021-04-02 | 2022-10-14 | 西安电子科技大学 | 一种基于神经网络的跨分量色度预测方法及装置 |
| US11956453B2 (en) * | 2021-06-15 | 2024-04-09 | Tencent America LLC | Content-adaptive online training for DNN-based cross component prediction with scaling factors |
| WO2023016408A1 (en) * | 2021-08-13 | 2023-02-16 | Beijing Bytedance Network Technology Co., Ltd. | Method, apparatus, and medium for video processing |
| WO2023197189A1 (zh) * | 2022-04-12 | 2023-10-19 | Oppo广东移动通信有限公司 | 编解码方法、装置、编码设备、解码设备以及存储介质 |
| WO2023224290A1 (ko) * | 2022-05-18 | 2023-11-23 | 현대자동차주식회사 | 인트라 예측에서 성분간 관계 모델 유도를 위한 참조샘플 선택을 위한 방법 및 장치 |
| CN116668704B (zh) * | 2023-08-02 | 2024-02-06 | 深圳传音控股股份有限公司 | 处理方法、处理设备及存储介质 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8855213B2 (en) * | 2009-03-26 | 2014-10-07 | Apple Inc. | Restore filter for restoring preprocessed video image |
| WO2013112739A1 (en) * | 2012-01-24 | 2013-08-01 | Futurewei Technologies, Inc. | Simplification of lm mode |
| CN103260018B (zh) * | 2012-02-16 | 2017-09-22 | 乐金电子(中国)研究开发中心有限公司 | 帧内图像预测编解码方法及视频编解码器 |
| US9648330B2 (en) * | 2013-07-15 | 2017-05-09 | Qualcomm Incorporated | Inter-color component residual prediction |
| KR101530774B1 (ko) * | 2013-09-30 | 2015-06-22 | 연세대학교 산학협력단 | 영상 부호화 및 복호화 방법, 장치 및 시스템 |
| US9998742B2 (en) * | 2015-01-27 | 2018-06-12 | Qualcomm Incorporated | Adaptive cross component residual prediction |
| US10944976B2 (en) * | 2016-07-22 | 2021-03-09 | Sharp Kabushiki Kaisha | Systems and methods for coding video data using adaptive component scaling |
| JP2021005741A (ja) * | 2017-09-14 | 2021-01-14 | シャープ株式会社 | 画像符号化装置及び画像復号装置 |
| US20190342546A1 (en) * | 2018-05-03 | 2019-11-07 | FG Innovation Company Limited | Device and method for coding video data based on different reference sets in linear model prediction |
| EP3799428A4 (en) * | 2018-07-02 | 2021-04-14 | LG Electronics, Inc. | CCLM-BASED INTRA-PREDICTION DEVICE AND PROCESS |
-
2020
- 2020-05-15 CN CN202080048662.XA patent/CN114041288A/zh active Pending
- 2020-05-15 EP EP20837251.6A patent/EP3972251A4/en active Pending
- 2020-05-15 WO PCT/CN2020/090644 patent/WO2021004152A1/zh unknown
- 2020-05-15 KR KR1020217042910A patent/KR20220030950A/ko unknown
- 2020-05-15 JP JP2021578139A patent/JP2022539786A/ja active Pending
-
2021
- 2021-12-21 US US17/557,546 patent/US20220116591A1/en active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023204624A1 (ko) * | 2022-04-20 | 2023-10-26 | 엘지전자 주식회사 | Cccm(convolutional cross-component model) 예측에 기반한 영상 부호화/복호화 방법, 장치 및 비트스트림을 저장하는 기록 매체 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3972251A1 (en) | 2022-03-23 |
| EP3972251A4 (en) | 2022-08-24 |
| CN114041288A (zh) | 2022-02-11 |
| WO2021004152A1 (zh) | 2021-01-14 |
| JP2022539786A (ja) | 2022-09-13 |
| US20220116591A1 (en) | 2022-04-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20220030950A (ko) | 픽처 컴포넌트의 예측 방법, 인코더, 디코더 및 저장 매체 | |
| US20230239495A1 (en) | Encoder-side search ranges having horizontal bias or vertical bias | |
| CN112690000B (zh) | 用于进行反量化的装置和方法 | |
| KR102606330B1 (ko) | Aps 시그널링 기반 비디오 또는 영상 코딩 | |
| CN116405687A (zh) | 视频译码中使用交叉分量线性模型进行帧内预测 | |
| JP7463460B2 (ja) | ビデオ復号方法およびビデオデコーダ | |
| US11811975B2 (en) | Method and a device for picture encoding and decoding | |
| KR20210135337A (ko) | 적응적 루프 필터 기반 비디오 또는 영상 코딩 | |
| KR20210118194A (ko) | 루마 맵핑 및 크로마 스케일링 기반 비디오 또는 영상 코딩 | |
| EP4017000A1 (en) | Image encoding/decoding method and apparatus for determining prediction mode of chroma block by referring to luma sample position, and method for transmitting bitstream | |
| KR20220029589A (ko) | 픽처 예측 방법, 인코더, 디코더 및 저장 매체 | |
| US11677936B2 (en) | Prediction method for decoding and apparatus, and computer storage medium | |
| WO2014050150A1 (en) | Signaling decoder picture buffer information | |
| JP2023113887A (ja) | 予測デコーディング方法、装置及びコンピュータ記憶媒体 | |
| KR20210118947A (ko) | 루마 맵핑 및 크로마 스케일링 기반 비디오 또는 영상 코딩 | |
| KR102438149B1 (ko) | 비디오 코딩을 위한 위치 종속 공간 가변 변환 | |
| US11973942B2 (en) | Image encoding/decoding method and apparatus for determining prediction mode of chroma block by referring to luma sample position, and method for transmitting bitstream | |
| KR20210152576A (ko) | 디블록킹 필터링에 기반한 영상 코딩 방법 및 그 장치 | |
| JP2023030585A (ja) | 画像符号化装置及び方法及びプログラム | |
| KR20220110835A (ko) | Bdpcm 을 사용하는 영상 디코딩 방법 및 그 장치 | |
| EP3425910A1 (en) | A method and a device for picture encoding | |
| CN117956197A (en) | Video decoding method and video decoder |