KR20200093970A - 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치 및 방법 - Google Patents
양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치 및 방법 Download PDFInfo
- Publication number
- KR20200093970A KR20200093970A KR1020190011369A KR20190011369A KR20200093970A KR 20200093970 A KR20200093970 A KR 20200093970A KR 1020190011369 A KR1020190011369 A KR 1020190011369A KR 20190011369 A KR20190011369 A KR 20190011369A KR 20200093970 A KR20200093970 A KR 20200093970A
- Authority
- KR
- South Korea
- Prior art keywords
- matrix
- spd
- positive definite
- log
- manifold
- Prior art date
Links
- 239000011159 matrix material Substances 0.000 claims abstract description 149
- 238000000034 method Methods 0.000 claims abstract description 59
- 238000013507 mapping Methods 0.000 claims abstract description 47
- 230000009466 transformation Effects 0.000 claims abstract description 32
- 230000006870 function Effects 0.000 claims abstract description 25
- 238000012549 training Methods 0.000 claims abstract description 16
- 238000012545 processing Methods 0.000 claims abstract description 8
- 239000013598 vector Substances 0.000 claims description 14
- 238000005457 optimization Methods 0.000 claims description 8
- 238000011478 gradient descent method Methods 0.000 claims description 2
- 238000010606 normalization Methods 0.000 claims description 2
- 230000001131 transforming effect Effects 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 10
- 239000000463 material Substances 0.000 description 3
- 238000012360 testing method Methods 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 238000013528 artificial neural network Methods 0.000 description 2
- 238000005284 basis set Methods 0.000 description 2
- 230000006399 behavior Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000002474 experimental method Methods 0.000 description 2
- 230000035582 behavioral recognition Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 238000003786 synthesis reaction Methods 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/24—Classification techniques
-
- G06K9/6267—
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Data Mining & Analysis (AREA)
- Software Systems (AREA)
- Evolutionary Computation (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Artificial Intelligence (AREA)
- Medical Informatics (AREA)
- Mathematical Physics (AREA)
- Computing Systems (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Bioinformatics & Computational Biology (AREA)
- Evolutionary Biology (AREA)
- Image Analysis (AREA)
Abstract
Description
도 2는 본 발명에 따른 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 개념을 나타낸 구성도
도 3은 본 발명에 따른 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치의 구성도
도 4는 본 발명에 따른 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 방법을 나타낸 플로우 차트
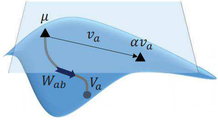
도 5는 점 μ을 다른 점 T에 연결하는 geodesic
도 6은 RS-DR-LEML의 정확도 대 차원 비교 그래프
도 7은 UIUC 재료 데이터 세트의 예를 나타낸 구성도















20. 유클리디안 포인트 처리부
30. 서브공간 맵핑부
40. 재맵핑부
Claims (19)
- SPD(Symmetric Positive Definite) 행렬로 표현된 데이터를 탄젠트 공간(tangent space)에 맵핑을 하는 탄젠트 공간 맵핑부;
탄젠트 공간 맵핑부에서 맵핑된 점들을 유클리디안 점(Euclidean point)(RD)로 표현하는 유클리디안 포인트 처리부;
파라미터 W를 통하여 (RK)인 서브공간(subspace)으로 맵핑을 하는 서브공간 맵핑부;
Expm(matrix exponential)을 통하여 탄젠트 공간(Tangent space)에서 SPD(n)으로 다시 재맵핑을 하여, 목적함수(objective function)를 이용하여 같은 클래스의 점들은 거리를 줄이고, 다른 클래스의 점들은 거리를 늘려 메트릭 러닝을 하는 재맵핑부;를 포함하는 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치. - 제 1 항에 있어서, 이미지가 가지고 있는 통계학적인 물리량의 표현인 SPD matrix(양의 정부호 행렬)으로 이미지의 정보를 압축하여 이 정보를 통해 네트워크를 훈련시키는 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치.
- 제 1 항에 있어서, SPD 매니폴드에서 로그 유클리디안(log-Euclidean) 메트릭 학습을 위한 RS(Riemannian submanifold) 프레임 워크를 이용하여 원래의 탄젠트 공간을 변경하지 않고 최적의 RS를 찾는 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치.
- 제 1 항에 있어서, 양의 정부호 행렬(SPD matrix)의 노말 좌표계(Normal coordinate)위에서 선형변환을 하여 비선형적인 제약을 제거하여,
리만 매니폴드의 차원을 축소시키지 않고 리만 서브매니폴드(submanifold)를 정의하여 원본 매니폴드에서 로그 유클리디안 메트릭 러닝을 하는 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치. - 제 4 항에 있어서, 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝을 위하여,
을 실수와 포지티브 행렬의 집합 매니폴드의 공간이라 하면, 이진연산
매니폴드의 공간이라 하면, 이진연산 과 두 점
과 두 점 의 정의에 의해,
의 정의에 의해,
으로 정의하고,
여기서,은 아이덴티티 I를 갖는 아벨리안 리 그룹(abelian Lie groups)으로 해석되는 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치.
- 제 5 항에 있어서,아벨리안 리 그룹은에 대한 이중 불변 메트릭(bi-invariant metric)을 충족하고,

으로 정의되고,
여기서,은 크기 n × n의 대칭 행렬을 구성하는 탄젠트 공간이고,
는 방향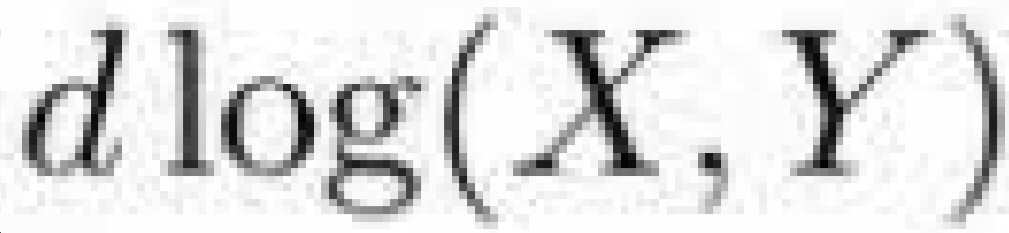 을 따라 점
을 따라 점
 에서 로그의 프레셰 방향 도함수(Frechet directional derivative)인 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치.
에서 로그의 프레셰 방향 도함수(Frechet directional derivative)인 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치.
- 제 6 항에 있어서,에 관하여 로그 유클리디안 메트릭에 의해 유도된
 의 두 점 X1, X2 사이의 측지선 거리는
의 두 점 X1, X2 사이의 측지선 거리는
으로 정의되고,
여기서,는 행렬 A의 프로베니우스 놈(Frobenius norm)을 나타내는 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치.
- 제 7 항에 있어서, SPD 행렬의 집합인 {X1, ..., XN}과 μ, 이들 SPD 행렬의 프레셰 평균,의 로그 유클리디안 메트릭과 연관된 리만 지수(Riemannian exponential) 및 로그 맵(logarithm maps)이 각각,

으로 주어지고,
여기서,는 을 SPD 매니폴드에 맵핑하고,
을 SPD 매니폴드에 맵핑하고, 는
는 을 탄젠트 공간에 맵핑하고,
을 탄젠트 공간에 맵핑하고, 를 (i,j) 번째 엔트리가 1 인 n × n 행렬로 놓고, 나머지는 모두 0이고, μ는 앵커 포인트 역할을 하는 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치.
를 (i,j) 번째 엔트리가 1 인 n × n 행렬로 놓고, 나머지는 모두 0이고, μ는 앵커 포인트 역할을 하는 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치.
- 제 8 항에 있어서,의 기초가 되는 집합은,

으로 정의되고,
여기서,와 는 i = 1, ..., D이고,
는 i = 1, ..., D이고,
카디널리티 V는으로 정의되는 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치.
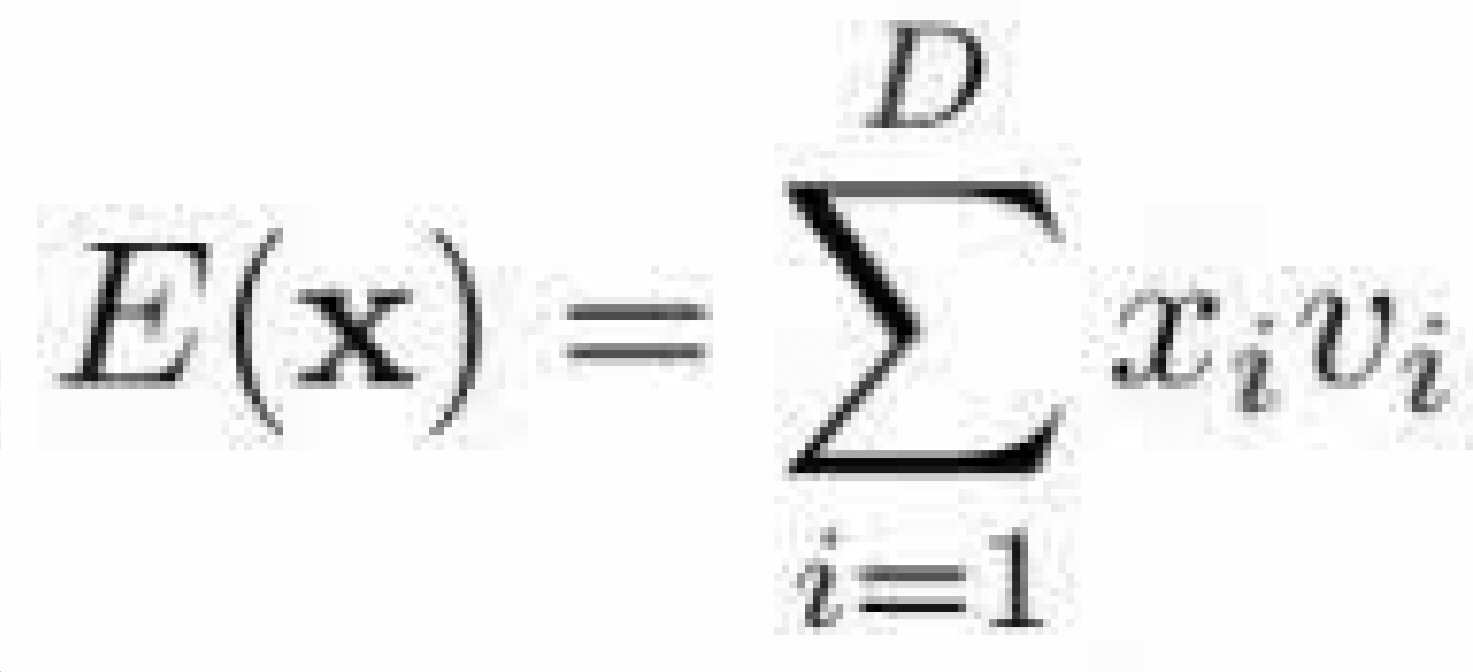
- 제 8 항에 있어서, 포인트를 기본 집합으로 투영하여 벡터로 SPD 매니폴드의 점을 특성화하고, 변환 행렬 W를 최적화하기 위하여,
계산된 프레셰(Frechet) 평균으로, SPD 행렬은 탄젠트 공간(즉, SPD(n) → Sym(n))에 매핑되고, 탄젠트 공간으로 점을 매핑한 후 Sym(n)의 직교 기저에 사상된 점을 투영함으로써, 탄젠트 공간의 각 점을 특징 짓는 매개 변수 벡터 x = (x 1 , ..., x D ) T 를 찾는 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치. - 제 10 항에 있어서, Sym(n)에 유클리디안 메트릭이 부여되면, Sym(n)의 기본 집합 V는 직교 기저이고,
를 유클리디안 공간에서 D 차원 벡터라 하면,
는 E(x)으로 특징되고 이는
으로 정의되는 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치.
- 제 11 항에 있어서, SPD 행렬는
 으로 특징되고,
으로 특징되고,
으로 정의되고,
거리 함수를 x 및 x'에 대해,
으로 재구성하고,
SPD(n)에서 두 점 X, X'를 증명하면, x와 x'는 X와 X'를 특성화하는 해당 매개 변수 즉, X = H(x),X' = H(x')이고,
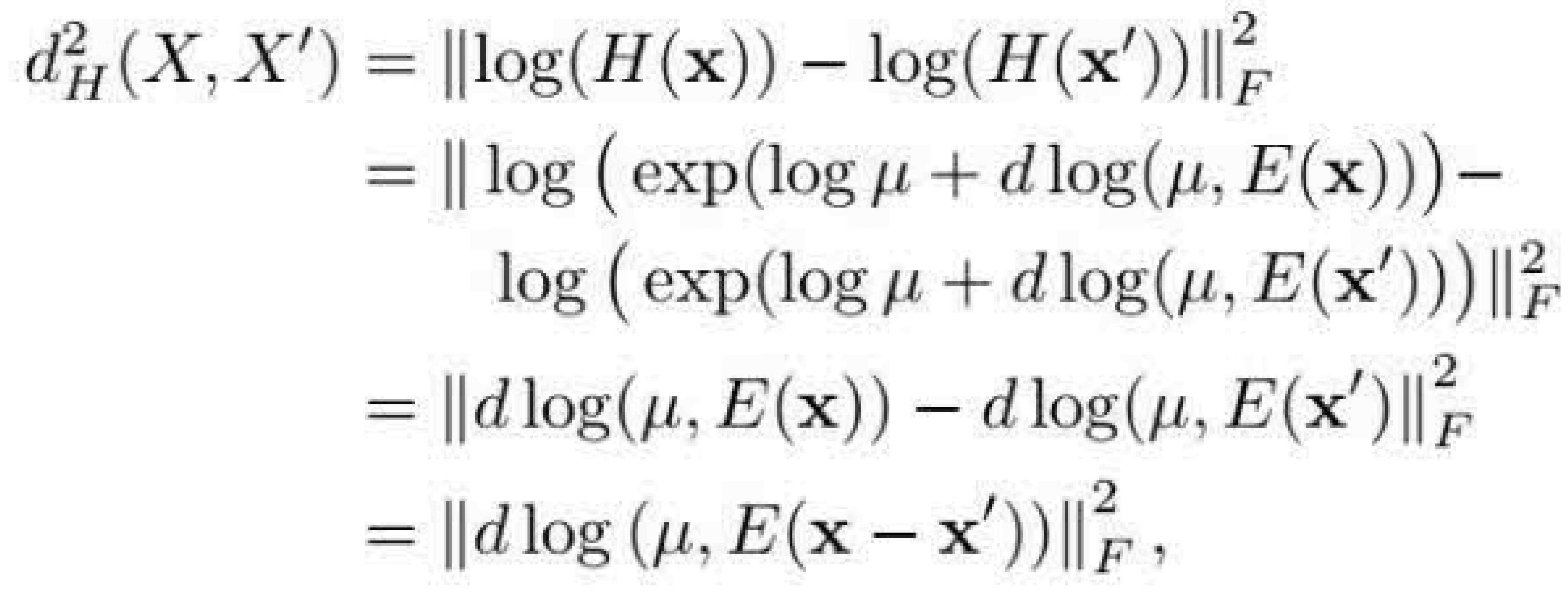
인 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치. - 제 12 항에 있어서, 매개 변수 x를 얻기 위하여 각 데이터 포인트에 대한 매개 변수 x에 대한 변환 맵핑 W를 찾고,
데이터 포인트의 매개 변수 x는 Y의 위쪽 삼각형 부분을 벡터화하여 구하고,
매개 변수 x는으로 정의되고,
여기서, vec는 벡터화를 나타내고, x는 Sym(n)과 동일한 차원을 가지며인 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치.
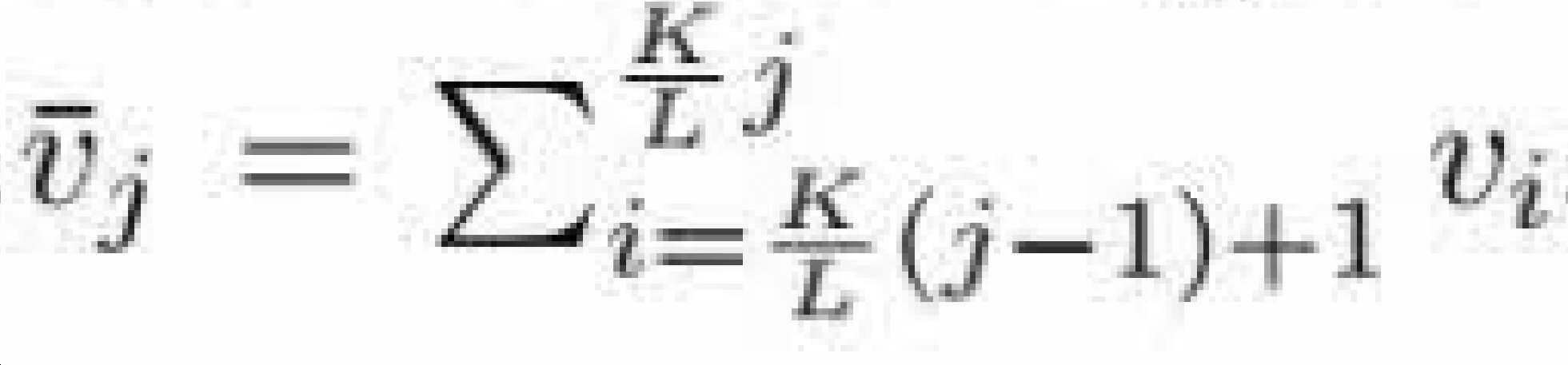
- 제 13 항에 있어서, RS(Riemannian submanifold)에 SPD(Symmetric Positive Definite)행렬을 투영하기 위하여,
를 낮은 차원 K < D을 갖는 으로 맵핑하여 변환 행렬
으로 맵핑하여 변환 행렬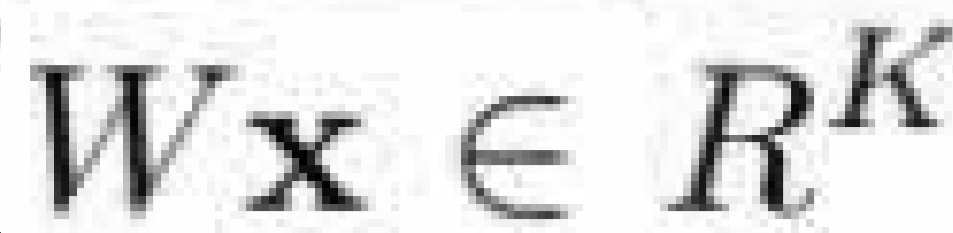 를 찾고,
를 찾고,
RS에서 V = {v 1 , ..., v D } 대신에 V의 서브 집합 {v 1 , ..., v K }의 부분 집합을 사용하고, 여기서, K < D이고,
두 개의 맵핑 된 점 사이의 거리가
으로 유되고,
는 두 매개 변수의 차이인 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치.
- 제 14 항에 있어서, 로그 손실 함수(logistic loss function)는
으로 정의되고,
여기서,이고, 첫 번째 항은 양의 쌍에 대한 거리를 최소화하고, 두 번째 항은 음의 쌍에 대해 작은 거리에 제약을 주는 것이고, 마지막 항은 변환 행렬 W를 희소하게 적용하는 정규화 항이고, δ는 가중치 매개 변수인 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치.
- 제 15 항에 있어서, 행렬 매니폴드의 최적화를 위하여 최적의 변환 행렬를 찾고,

손실 함수를 최소화는 으로 정의되고,
으로 정의되고,
최적화를 위해 무작위로 W를 초기화하고, W에 대한 기울기를 경사 하강법(gradient descent method)을 사용하여 계산하여 더 나은 W'를 찾는 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치. - 제 16 항에 있어서, W의 a번째 행과 b번째 열에 있는 원소를라 하면,
 에 대한
에 대한 의 유클리디안 도함수(Euclidean derivative)는,
의 유클리디안 도함수(Euclidean derivative)는,
으로 계산되고,
는 T에서의 x와 x'의 차 벡터의 b 번째 요소이고,
W1과 W2는으로 정의되고, 여기서, 는 b번째 기저 행렬이고 μ는
는 b번째 기저 행렬이고 μ는 의 프레셰(Frechet) 평균인 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치.
의 프레셰(Frechet) 평균인 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치.
- SPD(Symmetric Positive Definite) 행렬로 표현된 데이터를 탄젠트 공간(tangent space)에 맵핑을 하는 탄젠트 공간 맵핑 단계;
탄젠트 공간 맵핑 단계에서 맵핑된 점들을 유클리디안 점(Euclidean point)(RD)로 표현하는 유클리디안 포인트 처리 단계;
파라미터 W를 통하여 (RK)인 서브공간(subspace)으로 맵핑을 하는 서브공간 맵핑 단계;
Expm(matrix exponential)을 통하여 탄젠트 공간(Tangent space)에서 SPD(n)으로 다시 재맵핑을 하여, 목적함수(objective function)를 이용하여 같은 클래스의 점들은 거리를 줄이고, 다른 클래스의 점들은 거리를 늘려 메트릭 러닝을 하는 재맵핑 단계;를 포함하는 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 방법. - 제 18 항에 있어서, 이미지가 가지고 있는 통계학적인 물리량의 표현인 SPD matrix(양의 정부호 행렬)로 이미지의 정보를 압축하고, 압축된 정보를 통해 네트워크를 훈련시키고 이미지 분류를 하고,
양의 정부호 행렬(SPD matrix)의 노말 좌표계(Normal coordinate)위에서 선형변환을 하여 비선형적인 제약을 제거하여 리만 매니폴드의 차원을 축소시키지 않고 리만 서브매니폴드(submanifold)를 정의하여 원본 매니폴드에서 로그 유클리디안 메트릭 러닝을 하는 것을 특징으로 하는 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190011369A KR102225586B1 (ko) | 2019-01-29 | 2019-01-29 | 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치 및 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190011369A KR102225586B1 (ko) | 2019-01-29 | 2019-01-29 | 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치 및 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200093970A true KR20200093970A (ko) | 2020-08-06 |
| KR102225586B1 KR102225586B1 (ko) | 2021-03-09 |
Family
ID=72040092
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190011369A KR102225586B1 (ko) | 2019-01-29 | 2019-01-29 | 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치 및 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102225586B1 (ko) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112561888A (zh) * | 2020-12-18 | 2021-03-26 | 中国科学院深圳先进技术研究院 | 基于流形优化的用于磁共振动态成像的深度学习方法 |
| CN113989907A (zh) * | 2021-11-29 | 2022-01-28 | 江苏科技大学 | 一种基于非对称性特征和黎曼流形结构的人脸识别方法 |
| CN114863548A (zh) * | 2022-03-22 | 2022-08-05 | 天津大学 | 基于人体运动姿态非线性空间特征的情绪识别方法及装置 |
| CN116131891A (zh) * | 2023-03-16 | 2023-05-16 | 西安电子科技大学 | 基于黎曼流形的分层码本设计方法 |
| CN116687406A (zh) * | 2023-05-06 | 2023-09-05 | 粤港澳大湾区精准医学研究院(广州) | 情绪识别方法、装置、电子设备及存储介质 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180020376A (ko) | 2016-08-18 | 2018-02-28 | 고려대학교 산학협력단 | 행동 패턴 인식 장치, 행동 패턴 인식 방법 및 행동 패턴 분류기 생성 방법 |
| KR101914717B1 (ko) | 2017-09-28 | 2018-11-02 | 전남대학교산학협력단 | 대칭 양정치 행렬의 곱 다양체에 대해 재생 커널 힐버트 공간을 이용한 인간 행동 인식 방법 |
-
2019
- 2019-01-29 KR KR1020190011369A patent/KR102225586B1/ko active IP Right Grant
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180020376A (ko) | 2016-08-18 | 2018-02-28 | 고려대학교 산학협력단 | 행동 패턴 인식 장치, 행동 패턴 인식 방법 및 행동 패턴 분류기 생성 방법 |
| KR101914717B1 (ko) | 2017-09-28 | 2018-11-02 | 전남대학교산학협력단 | 대칭 양정치 행렬의 곱 다양체에 대해 재생 커널 힐버트 공간을 이용한 인간 행동 인식 방법 |
Non-Patent Citations (4)
| Title |
|---|
| "Log-Euclidean Metric Learning on Symmetric Positive Definite Manifold with Application to Image Set Classification", Proceedings of the 32nd International Conference on Machine Learning, 2015.* * |
| "Low Rank Representation on SPD matrices with Log-Euclidean metric", Pattern Recognition 76(pp. 623-634), 2018. * |
| "Riemannian Metric Learning for Symmetric Positive Definite Matrices", arXiv:1501.02393v1 [cs.CV], 10 Jan 2015. * |
| "Visual Tracking Via Incremental Log-Euclidean Riemannian Subspace Learning", IEEE, 2008 * |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112561888A (zh) * | 2020-12-18 | 2021-03-26 | 中国科学院深圳先进技术研究院 | 基于流形优化的用于磁共振动态成像的深度学习方法 |
| CN112561888B (zh) * | 2020-12-18 | 2024-04-16 | 中国科学院深圳先进技术研究院 | 基于流形优化的用于磁共振动态成像的深度学习方法 |
| CN113989907A (zh) * | 2021-11-29 | 2022-01-28 | 江苏科技大学 | 一种基于非对称性特征和黎曼流形结构的人脸识别方法 |
| CN114863548A (zh) * | 2022-03-22 | 2022-08-05 | 天津大学 | 基于人体运动姿态非线性空间特征的情绪识别方法及装置 |
| CN114863548B (zh) * | 2022-03-22 | 2024-05-31 | 天津大学 | 基于人体运动姿态非线性空间特征的情绪识别方法及装置 |
| CN116131891A (zh) * | 2023-03-16 | 2023-05-16 | 西安电子科技大学 | 基于黎曼流形的分层码本设计方法 |
| CN116687406A (zh) * | 2023-05-06 | 2023-09-05 | 粤港澳大湾区精准医学研究院(广州) | 情绪识别方法、装置、电子设备及存储介质 |
| CN116687406B (zh) * | 2023-05-06 | 2024-01-02 | 粤港澳大湾区精准医学研究院(广州) | 情绪识别方法、装置、电子设备及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102225586B1 (ko) | 2021-03-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102225586B1 (ko) | 양의 정부호 행렬 위에서의 리만 서브 매니폴드 프레임워크를 이용한 로그 유클리디안 메트릭 러닝 장치 및 방법 | |
| Besserve et al. | Counterfactuals uncover the modular structure of deep generative models | |
| Tenenbaum et al. | Separating style and content with bilinear models | |
| Patle et al. | SVM kernel functions for classification | |
| Chazal et al. | The density of expected persistence diagrams and its kernel based estimation | |
| JP2925435B2 (ja) | 入力分類方法、トレーニング方法、調整方法、及び装置 | |
| WO2018149133A1 (zh) | 基于核非负矩阵分解的字典学习和稀疏特征表示的人脸识别方法及系统 | |
| EP4094201A1 (en) | Method of training an image classification model | |
| CN103093235B (zh) | 一种基于改进距离核主成分分析的手写体数字识别方法 | |
| Huang et al. | Quadratic regularization projected Barzilai–Borwein method for nonnegative matrix factorization | |
| CN108681721A (zh) | 基于图像分割二维双向数据线性相关组合的人脸识别方法 | |
| Girshick et al. | Discriminatively activated sparselets | |
| Hathaway et al. | Kernelized non-Euclidean relational fuzzy c-means algorithm | |
| CN113971735A (zh) | 一种深度图像聚类方法、系统、设备、介质及终端 | |
| CN104598925A (zh) | 一种基于ELM的多类Adaboost集成学习方法 | |
| CN109978064A (zh) | 基于图像集的李群字典学习分类方法 | |
| Alzate et al. | A weighted kernel PCA formulation with out-of-sample extensions for spectral clustering methods | |
| CN115995011A (zh) | 基于图正则化的非线性正交非负矩阵分解图像聚类方法 | |
| CN112966735A (zh) | 一种基于谱重建的监督多集相关特征融合方法 | |
| CN117312447A (zh) | 一种实时产业链大数据分布式处理方法及系统 | |
| Yamashita et al. | A new biplot procedure with joint classification of objects and variables by fuzzy c-means clustering | |
| Zheng et al. | Minimal support vector machine | |
| Sánchez et al. | Diatom classification including morphological adaptations using CNNs | |
| Zdunek et al. | Image classification with nonnegative matrix factorization based on spectral projected gradient | |
| CN111461255A (zh) | 一种基于间隔分布的Siamese网络图像识别方法及系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20190129 |
|
| PA0201 | Request for examination | ||
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20200811 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20210218 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20210303 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20210304 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20231227 Start annual number: 4 End annual number: 4 |
|
| PR1001 | Payment of annual fee |
Payment date: 20241223 Start annual number: 5 End annual number: 5 |