KR20200055732A - Cmut 어레이 및 고체 상태 냉각기능을 갖춘 의료 장치, 그와 관련된 방법 및 시스템 - Google Patents
Cmut 어레이 및 고체 상태 냉각기능을 갖춘 의료 장치, 그와 관련된 방법 및 시스템 Download PDFInfo
- Publication number
- KR20200055732A KR20200055732A KR1020207009532A KR20207009532A KR20200055732A KR 20200055732 A KR20200055732 A KR 20200055732A KR 1020207009532 A KR1020207009532 A KR 1020207009532A KR 20207009532 A KR20207009532 A KR 20207009532A KR 20200055732 A KR20200055732 A KR 20200055732A
- Authority
- KR
- South Korea
- Prior art keywords
- catheter
- ultrasound
- cmut
- target tissue
- array
- Prior art date
Links
Images










































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N7/00—Ultrasound therapy
- A61N7/02—Localised ultrasound hyperthermia
- A61N7/022—Localised ultrasound hyperthermia intracavitary
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B17/22004—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for using mechanical vibrations, e.g. ultrasonic shock waves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B17/22004—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for using mechanical vibrations, e.g. ultrasonic shock waves
- A61B17/22012—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for using mechanical vibrations, e.g. ultrasonic shock waves in direct contact with, or very close to, the obstruction or concrement
- A61B17/2202—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for using mechanical vibrations, e.g. ultrasonic shock waves in direct contact with, or very close to, the obstruction or concrement the ultrasound transducer being inside patient's body at the distal end of the catheter
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/02—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by cooling, e.g. cryogenic techniques
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0833—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/12—Diagnosis using ultrasonic, sonic or infrasonic waves in body cavities or body tracts, e.g. by using catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/488—Diagnostic techniques involving Doppler signals
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F7/00—Heating or cooling appliances for medical or therapeutic treatment of the human body
- A61F7/007—Heating or cooling appliances for medical or therapeutic treatment of the human body characterised by electric heating
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F7/00—Heating or cooling appliances for medical or therapeutic treatment of the human body
- A61F7/12—Devices for heating or cooling internal body cavities
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B06—GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS IN GENERAL
- B06B—METHODS OR APPARATUS FOR GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS OF INFRASONIC, SONIC, OR ULTRASONIC FREQUENCY, e.g. FOR PERFORMING MECHANICAL WORK IN GENERAL
- B06B1/00—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency
- B06B1/02—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of electrical energy
- B06B1/0292—Electrostatic transducers, e.g. electret-type
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00005—Cooling or heating of the probe or tissue immediately surrounding the probe
- A61B2018/00047—Cooling or heating of the probe or tissue immediately surrounding the probe using Peltier effect
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00547—Prostate
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00577—Ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00791—Temperature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/02—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by cooling, e.g. cryogenic techniques
- A61B2018/0212—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by cooling, e.g. cryogenic techniques using an instrument inserted into a body lumen, e.g. catheter
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F7/00—Heating or cooling appliances for medical or therapeutic treatment of the human body
- A61F7/007—Heating or cooling appliances for medical or therapeutic treatment of the human body characterised by electric heating
- A61F2007/0075—Heating or cooling appliances for medical or therapeutic treatment of the human body characterised by electric heating using a Peltier element, e.g. near the spot to be heated or cooled
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F7/00—Heating or cooling appliances for medical or therapeutic treatment of the human body
- A61F2007/0086—Heating or cooling appliances for medical or therapeutic treatment of the human body with a thermostat
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F7/00—Heating or cooling appliances for medical or therapeutic treatment of the human body
- A61F2007/0095—Heating or cooling appliances for medical or therapeutic treatment of the human body with a temperature indicator
- A61F2007/0096—Heating or cooling appliances for medical or therapeutic treatment of the human body with a temperature indicator with a thermometer
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N7/00—Ultrasound therapy
- A61N2007/0004—Applications of ultrasound therapy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N7/00—Ultrasound therapy
- A61N2007/0043—Ultrasound therapy intra-cavitary
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N7/00—Ultrasound therapy
- A61N2007/0078—Ultrasound therapy with multiple treatment transducers
Abstract
의료 장치는 표적 조직에 초음파를 방출하도록 구성된 용량성 미세기계가공 초음파 변환기(CMUT) 어레이, 및 CMUT 어레이와 기계적으로 커플링되고 초음파에 의해 가열된 비-표적 조직을 냉각시키도록 구성된 적어도 하나의 열전 냉각기를 포함한다. 의료 장치는 열전 냉각기로부터 멀리 열을 전도하기 위해서 열전 냉각기에 커플링되고 카테터를 따라 연장하는 고체 열 전도체와 함께 카테터에서 구현될 수 있다. 카테터 또는 카테터 슬리브는 신체 채널 내로 삽입하기 위한 관형 벽, 및 신체 채널 벽을 냉각시키기 위한 관형 벽에 커플링된 적어도 하나의 열전 냉각기를 포함한다. 카테터 슬리브는 신체 채널 내로 삽입하고 카테터를 감쌀 수 있는 관형 케이싱, 및 온도 및 압력과 같은 신체 채널 벽의 하나 이상의 특성을 감지하기 위해 관형 케이싱에 커플링된 적어도 하나의 센서를 포함한다.
Description
본 출원은 2017년 9월 13일자로 출원된 미국 가 특허 출원 일련번호 62/558,200호, 2018년 4월 9일자로 출원된 미국 가 특허 출원 일련번호 62/654,765호 및 2018년 9월 7일자로 출원된 미국 가 특허 출원 일련번호 62/728,616호의 우선권의 이득을 주장한다. 언급된 모든 출원은 그 전문이 원용에 의해 본 출원에 포함된다.
정상적인 남성 요도는 전립선을 통과한다. 전립선 내에 위치된 요도의 부분은 본 명세서에서 전립선 요도로 지칭된다.
전립선 내에서 세포의 과성장으로 종종 전립선 비대를 유발하는 양성 전립선 비대증(BPH)은 매우 흔하다. 위키피디아(Wikipedia)에 따르면, 남성의 50 세까지50 %가 그리고 80 세까지 75 %가 BPH 이력을 보이며, 이들 중 절반 정도가 증상을 나타낼 수 있다. BPH의 가장 흔한 증상은 요도에 압력을 가하는 전립선 비대로 인한 소변 흐름의 방해, 소변 흐름의 방해로 인한 불완전한 잔뇨감, 소변 보유, 빈번한 배뇨 및 방광과 신장 손상을 유발할 수 있는 요로 감염을 포함한다.
대략 80 %의 남성이 80 세까지 전립선 암을 발병한다. 이들 전립선 암의 대부분이 느리게 성장하지만, 전립선 암은 2010년에 전세계적으로 약 250,000 명의 남성을 사망케 했다. 느리게 성장하는 전립선 종양조차도 BPH의 장애와 유사하게, 질량 효과(mass effect)와 종양 침습으로 요도를 손상시키고 소변 흐름을 막을 수 있다.
BPH 및 전립선 암은 전립선에 공존할 수 있으며; 그 조합은 또한, 소변 흐름을 방해하는데 충분하게 전립선을 확대할 수 있다. 종양의 질량 효과 또는 BPH로 인한 전립선의 높은 압력은 요도가 부분적으로 또는 완전히 붕괴되게 하여 소변 흐름을 제한한다.
BPH에 의해 확대된 전립선에 의한 소변 흐름의 방해는 종종, 소변 흐름을 개선시키기 위한 치료를 필요로 한다. 이러한 방해는 테스토스테론(testosterone)을 방해하는 약물, 또는 개방형 전립선 절제술, 전립선의 요도 절제술(TURP) 및 전립선의 요도 레이저 절제와 같은 수술 절차를 포함한 여러 방식으로 치료되어 왔다. 감염 위험, 통증 및 치유 시간이 개방형 수술 절차에 비해 통상적으로 감소되기 때문에, 경요도 절차(Transurethral procedure)가 선호된다.
전립선 요도 내에 배치된 마이크로파 안테나를 사용하여 전립선이 가열되는 경요도 마이크로파 치료법(TUMT)은 공지된 치료법 중 하나이다. TUMT 부작용은 요도의 과도한 가열로 인한 요도 손상을 포함할 수 있다. 레이저 절제는 유사한 부작용으로 고통을 받는다.
BPH의 과잉 조직의 일부를 절제하는데 충분한 전립선의 부분을 가열하기 위한 전립선의 초음파 치료는 예를 들어, Rouviere 등의 Radiology. 2011 May, volume 259, issue 2, pp 583-91에서 “Prostate cancer ablation with transrectal high-intensity focused ultrasound: assessment of tissue destruction with contrast-enhanced US”, 그리고 Chris J. Diederich와 Everette C. Burdette의 IEEE Transactions on Ultrasonics, Ferroelectrics 및 Frequency Control. Vol. 43. No. 6. November 1996(Diederich)에서 “Transurethral Ultrasound Array for Prostate Thermal Therapy: Initial Studies”로 제안되었다. Diederich는 두 개의 루멘(lumen)을 가진 카테터(catheter)를 제안하며; 냉각수가 하나의 루멘을 통해 카테터로 흐르고 제 2 루멘을 통해 7 MHz 초과의 압전 세라믹 변환기를 빠져나오는 2 개의 루멘을 가진 카테터를 제안한다. 돼지 근육에서 실험한 Diederich는 변환기로부터 1.5 cm의 조직에서 상당한 온도 상승을 보고했으며; 이들 온도 상승은 전립선 조직을 죽이는데 충분하다고 여겨진다.
압전 세라믹 변환기를 사용하여 국소 전립선 암의 조직을 가열하기 위한 높은 세기의 초음파는 SonaCare Medical, Alpinion Medical Systems, 및 Profound Medical(http://www.profoundmedical.com/new-tulsa/ 참조)에 의해 제안된다. 국소 전립선 암 환자의 전립선 조직의 자기 공명 이미지-안내 요도 초음파 절제: A Prospective Phase 1 Clinical Trial, Joseph Chin et al., European Urology vol. 70, pp 447-455 (2016)에 보고된 바와 같이, MRI-TULSA란 이름의 심오한 의료 기기는 치료를 위한 어레이의 정밀한 위치 설정을 위해 외부 핵자기 공명 이미징(MRI)에 의존하고, 10 개의 방향성 압전 변환기를 갖는 강성 요도 카테터를 사용하고, 전립선 요도의 파괴를 피하기 위해 직장 카테터(rectal catheter)에 의한 수냉을 사용한다. MRI-TULSA의 임상 시험은 조직을 손상시키거나 절제하는데 충분한 55 ℃의 내부 전립선 온도에 도달했다.
용량성 미세기계가공 초음파 변환기(Capacitive micromachiend ultrasonic transduers)(CMUT)는 압전 변환기의 원리와 상이한 원리로 작동한다. 압전 변환기는 인가된 전기장에 응답하여 구부러지거나 수축/팽창하는 압전 결정을 기반으로 한다. CMUT은 실리콘-기반 기판에 형성된 공동을 가진다. 전극을 갖춘 박막이 공동의 상부에 현수된다. 기판에 고정된 다른 전극은 공동 아래에 위치된다. 그 후, 두 전극 사이에 전압이 가해질 때 정전 인력이 막을 아래쪽으로 끌어당겨 공동을 수축시킨다. 전압 강하가 제거되면, 막이 되돌아온다. 인가된 전압이 충분히 높은 주파수에서 정현파이면, 막은 동일한 주파수에서 진동하고 음향 에너지를 접촉하는 매체로 보낸다. 압전 변환기와는 대조적으로, CMUT은 내부 손실 메커니즘이 크지 않으며 본질적으로 자체-가열이 없다.
실시예에서, 의료 장치는 표적 조직에 초음파를 방출하도록 구성된 용량성 미세기계가공 초음파 변환기(CMUT) 어레이, 및 CMUT 어레이와 기계적으로 커플링되고 초음파에 의해 가열된 비-표적 조직을 냉각시키도록 구성된 적어도 하나의 열전 냉각기를 포함한다.
실시예에서, 고체 상태 냉각기능을 갖춘 초음파 치료용 카테터는 (a) 표적 조직으로 초음파를 방출하도록 구성된 CMUT 어레이, (b) 초음파에 의해 가열된 비-표적 조직을 냉각하도록 구성된 열전 냉각기로서, 초음파 변환기가 카테터의 원위 단부에 배치되는, 열전 냉각기, 및 (c) 열전 냉각기에 커플링되고 카테터를 따라 카테터의 원위 단부로부터 근위 단부 쪽으로 멀리 연장하여 열전 냉각기로부터 멀리 열을 전도시키는 고체 열 전도체를 포함한다.
실시예에서, 고체 상태 냉각기능을 갖춘 향상된 초음파 치료용 시스템은 이전 단락에서 언급된 카테터, 및 2 개의 음향 미러를 포함한다. 2 개의 음향 미러 각각은 CMUT 어레이와 협력하여 각각의 음향 공동을 형성함으로써 음향 공동 내의 초음파 세기를 증가시키도록 구성된다.
실시예에서, 의료 장치는 표적 조직을 초음파에 노출시키기 위한 카테터를 포함한다. 카테터는 (a) 카테터의 원위 단부에 배치되고 초음파를 표적 조직으로 방출하도록 구성된 CMUT 어레이, (b) 초음파에 의해 가열된 비-표적 조직을 냉각하도록 구성된 열전 냉각기, (c) 열전 냉각기에 커플링되고 카테터를 따라 카테터의 원위 단부로부터 근위 단부 쪽으로 멀리 연장되어 열전 냉각기로부터 멀리 열을 전도시키는 고체 열 전도체를 포함한다. 의료 장치는 카테터의 근위 단부에 기계적으로 커플링되고 카테터가 내부에 삽입되는 신체 채널 외부에 위치되어 카테터를 적어도 부분적으로 제어하도록 구성된 카테터 핸들을 더 포함한다.
실시예에서, 향상된 초음파 치료용 시스템은 초음파 변환기 어레이를 포함하고 신체의 표적 조직을 초음파에 노출시키기 위해 초음파 변환기 어레이를 신체의 채널에 위치시키도록 구성된 카테터, 및 적어도 하나의 음향 미러를 포함한다. 각각의 음향 미러는 초음파 변환기 어레이의 반대편에 있는 표적 조직의 측면에서 채널의 외부에 위치하도록 구성되어, 초음파 변환기 어레이와 음향 미러 사이에 정재파(standing acoustic wave)를 생성함으로써 표적 조직에서 초음파의 세기를 향상시키는 음향 공동을 형성한다.
실시예에서, 향상된 초음파 치료용 시스템은 제 1 초음파 변환기 어레이, 및 음향 공동을 형성하기 위해 제 1 초음파 변환기 어레이와 협력하도록 구성된 제 2 초음파 변환기 어레이를 포함하며, 음향 공동은 음향 공동 내에 정재파를 생성함으로써 표적 조직에서, 제 1 초음파 변환기 어레이 및 제 2 초음파 변환기 어레이에 의해 발생된 초음파의 세기를 향상시킨다.
실시예에서, 고체 상태 냉각기능을 갖춘 카테터 또는 카테터 슬리브는 신체의 채널 내로 삽입하기 위한 관형 벽, 및 채널의 조직을 냉각시키기 위해 관형 벽에 커플링된 적어도 하나의 열전 냉각기를 포함한다.
실시예에서, 통합된 감지기능을 갖춘 카테터 슬리브는 신체의 채널 내로 삽입되고 카테터를 감쌀 수 있는 관형 케이싱, 및 관형 케이싱에 커플링되고 채널의 조직의 하나 이상의 특성을 감지하도록 구성된 적어도 하나의 센서를 포함한다. 하나 이상의 특성 각각은 온도 및 압력으로 이루어진 그룹으로부터 선택된다.
실시예에서, 고체 상태 냉각기능을 갖춘 초음파 치료용 시스템은 표적 조직을 초음파에 노출시키기 위해 CMUT 어레이를 구동하기 위한 구동 신호를 발생하도록 구성된 초음파 구동 회로를 포함한다. 시스템은 초음파에 의해 가열된 비-표적 조직을 냉각시키기 위해 적어도 하나의 열전 냉각기를 구동하도록 구성된 펠티에 구동 회로(Peltier driving circuitry)를 더 포함한다.
실시예에서, 고체 상태 냉각기능을 갖춘 초음파 치료 방법은 (a) CMUT 어레이에 의해 발생된 초음파에 표적 조직을 노출시키는 단계, (b) 하나 이상의 열전 냉각기를 사용하여 비-표적 조직을 냉각시켜 비-표적 조직의 손상을 방지하는 단계, 및 (c) 하나 이상의 열전 냉각기 및 비-표적 조직으로부터 멀리 열을 제거하는 단계를 포함한다.
실시예에서, 초음파 이미징 피드백에 의한 초음파 치료 방법은 (a) 초음파 변환기 어레이로부터 표적 조직의 이미지를 얻어 표적 조직에 대해 공간적으로 분해된 클러터 신호(clutter signal)를 결정하는 단계, 및 (b) 클러터 신호 및 클러터 신호와 치료 효능 사이의 미리 결정된 대응관계에 기초하여, 표적 조직을 치료하기 위해 초음파 변환기 어레이에 의한 초음파의 후속 발생에 대한 하나 이상의 특성을 결정하는 단계를 포함한다.
실시예에서, 초음파 이미지 피드백을 사용하여 초음파 치료를 제어하기 위한 제품은 비-일시적 메모리에 인코딩된 기계 판독 가능한 명령어를 포함한다. 기계 판독 가능한 명령어는 (a) 초음파 클러터 신호와 초음파 치료 효능 사이의 대응관계, 및 (b) 프로세서에 의해 실행될 때, 표적 조직의 초음파 이미징으로부터 얻어진 공간적으로 분해된 클러터 신호를 평가하고 표적 조직의 후속 초음파 노출에 대한 하나 이상의 특성을 결정하기 위해 대응관계를 이용하는 치료 제어 명령어를 포함한다.
실시예에서, 고상 냉각기능을 갖춘 CMUT 어레이의 제작 방법은 열전 냉각기의 제 1 열 전도체에 CMUT 어레이를 제작하는 단계를 포함한다. 열전 냉각기는 (a) 제 1 열 전도체, (b) 제 2 열 전도체, 및 (c) 제 1 열 전도체와 제 2 열 전도체 사이에 배치되는 복수의 n-형 반도체 및 복수의 p-형 반도체를 포함하며, 복수의 n-형 반도체와 p-형 반도체는 전기적으로 직렬로 커플링되어 n-형 반도체와 p-형 반도체 사이에서 직렬 커플링이 교대한다.
도 1은 실시예에 따라서 용량성 미세기계가공 초음파 변환기(CMUT) 어레이 및 고체 상태 냉각기능을 갖춘 의료 장치를 예시한다.
도 2는 실시예에 따라서 CMUT 어레이 및 적어도 하나의 열전 냉각기를 갖는 CMUT-열전 냉각기(TEC) 장치를 예시한다.
도 3은 예시적인 사용 시나리오에서 그리고 표적 조직을 치료하기 위해 신체 채널에 배치되는 도 2의 CMUT-TEC 장치를 예시한다.
도 4는 실시예에 따라서 CMUT 어레이를 통해 하나 이상의 열전 냉각기를 비-표적 조직에 열적으로 커플링하는 CMUT-TEC 장치를 예시한다.
도 5는 실시예에 따라서 CMUT 어레이를 통해 하나 이상의 열전 냉각기를 비-표적 조직에 열적으로 커플링하는 다른 CMUT-TEC 장치를 예시한다.
도 6은 CMUT-TEC 장치가 신체 채널의 벽과 물리적으로 접촉하도록 크기가 정해지는 예시적인 사용 시나리오에서 도 4 및 도 5의 CMUT-TEC 장치의 예시적인 실시예를 예시한다.
도 7은 실시예에 따라서 CMUT-TEC 장치 및 CMUT-TEC 장치로부터 멀리 열을 전도하기 위한 고체 열 전도체를 포함하는 의료 장치를 예시한다.
도 8은 실시예에 따른 1 차원 CMUT 어레이를 예시한다.
도 9는 실시예에 따른 1.5D CMUT 어레이를 예시한다.
도 10은 실시예에 따른 1.75D CMUT 어레이를 예시한다.
도 11은 실시예에 따른 2 차원 CMUT 어레이를 예시한다.
도 12a 및 도 12b는 각각, 실시예에 따른 CMUT-TEC 장치의 단면도 및 평면도를 예시한다.
도 13은 실시예에 따라서 그 사이에 조정 가능한 각도를 갖는 2 개의 평면 CMUT 서브어레이를 갖춘 CMUT-TEC 장치를 예시한다.
도 14는 실시예에 따라서 그 사이에 조정 가능한 각도를 갖는 2 개의 평면 CMUT 서브어레이를 갖는 CMUT-TEC 장치를 예시한다.
도 15는 실시예에 따라서 서로로부터 멀어지게 경사진 2 개의 평면 CMUT 서브어레이를 갖춘 CMUT-TEC 장치를 예시한다.
도 16은 실시예에 따라서 서로로부터 멀어지게 경사진 2 개의 평면 CMUT 서브어레이를 갖춘 CMUT-TEC 장치를 예시한다.
도 17은 실시예에 따른 CMUT-TEC 변환기 장치를 갖춘 카테터를 예시한다.
도 18은 실시예에 따른 CMUT-TEC 장치를 갖춘 다른 카테터를 예시한다.
도 19, 도 20 및 도 21은 실시예에 따른 CMUT-TEC 장치를 갖춘 카테터를 예시한다.
도 22는 실시예에 따라서 제거 가능한 방식으로 CMUT 어레이 및 고체 상태 냉각기능을 갖춘 카테터를 감싸도록 구성된 카테터 슬리브를 예시한다.
도 23은 실시예에 따라서 CMUT-TEC 장치의 제거를 허용하는 관형 카테터 재킷을 사용하는 CMUT-TEC 장치를 갖춘 카테터를 예시한다.
도 24는 실시예에 따른 고체 상태 냉각기능을 갖춘 카테터 또는 카테터 슬리브를 예시한다.
도 25는 실시예에 따라서 그의 관형 벽에 커플링된 적어도 하나의 열전 냉각기를 갖는 카테터 또는 카테터 슬리브를 예시한다.
도 26은 실시예에 따라서 적어도 하나의 열전 냉각기 및 그의 관형 벽에 커플링된 고체 열 전도체를 가지는 카테터 또는 카테터 슬리브를 예시한다.
도 27a 및 도 27b는 실시예에 따른 열전 냉각기능을 갖춘 카테터 또는 카테터 슬리브를 예시한다.
도 28a 내지 도 28d는 실시예에 따른 열전 냉각기능을 갖춘 다른 카테터 또는 카테터 슬리브를 예시한다.
도 29는 실시예에 따라서 신체 채널의 일부분에 고정되는 동안 신체 채널 내부로부터 표적 조직의 초음파 치료를 위한 카테터를 감싸도록 구성된 카테터 슬리브를 예시한다.
도 30은 실시예에 따라서 방광에 고정되는 동안 요도 내부로부터 전립선의 초음파 치료를 위한 요도 카테터를 감싸도록 구성된 요도 카테터 슬리브를 예시한다.
도 31은 실시예에 따라서 신체 채널 내에 하나 이상의 통합 센서를 갖춘 카테터 슬리브를 예시한다.
도 32는 실시예에 따라서 그의 관형 케이싱에 하나 이상의 하드와이어 센서를 갖는 카테터 슬리브를 예시한다.
도 33은 실시예에 따라서 그의 관형 케이싱에 하나 이상의 무선 통신 기반 센서를 갖는 카테터 슬리브를 예시하며, 여기서 각각의 센서는 카테터 슬리브 내에 삽입된 카테터에 의해 판독된다.
도 34는 실시예에 따라서 그의 관형 케이싱에 적어도 하나의 센서를 갖는 카테터 슬리브를 예시하며, 여기서 각각의 센서는 카테터 슬리브에 삽입되고 센서와 전기 접촉되게 배치된 카테터에 의해 판독되도록 구성된다.
도 35는 실시예에 따른 초음파 치료 및 고체 상태 냉각기능을 위한 시스템을 예시한다.
도 36은 실시예에 따른 CMUT 어레이 및 고체 상태 냉각기능을 갖춘 의료 장치를 예시한다.
도 37은 실시예에 따른 CMUT 어레이, 고체 상태 냉각기능 및 관련 고체 상태 열 제거기능을 갖춘 의료 장치를 예시한다.
도 38은 실시예에 따라서 신체 채널에 고정되도록 구성된 카테터 슬리브를 포함한, CMUT 어레이 및 고체 상태 냉각기능을 갖는 의료 시스템을 예시한다.
도 39는 실시예에 따른 초음파 치료를 제어하기 위한 컴퓨터를 예시한다.
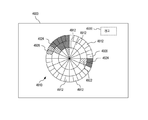
도 40은 실시예에 따른 향상된 초음파 치료 시스템을 예시한다.
도 41은 실시예에 따른 요도의 고체 상태 냉각기능으로 전립선의 향상된 초음파 치료를 위한 시스템을 예시한다.
도 42는 실시예에 따른 향상된 초음파 치료를 위한 다른 시스템을 예시한다.
도 43은 실시예에 따라서 요도의 고체 상태 냉각기능으로 전립선의 향상된 초음파 치료를 위한 다른 시스템을 예시한다.
도 44는 실시예에 따라서 고체 상태 냉각기능으로 초음파 치료를 위한 방법을 예시한다.
도 45는 실시예에 따라서 요도의 고체 상태 냉각기능으로 전립선의 초음파 치료를 위한 방법을 예시한다.
도 46은 실시예에 따라서 초음파 이미징 피드백으로 초음파 치료를 위한 방법을 예시한다.
도 47은 실시예에 따라서 초음파 이미지 피드백으로 초음파 치료를 제어하기 위한 시스템을 예시한다.
도 48은 실시예에 따라서 고체 상태 냉각기능으로 표적 조직의 초음파 치료를 위한 프로토콜을 예시한다.
도 49는 실시예에 따라서 CMUT 어레이의 여러 상이한 위치/방위를 요구하는 정도로 표적 조직의 치료를 관리하기 위해 도 48의 프로토콜과 함께 이용되도록 구성된 그래픽 사용자 인터페이스를 예시한다.
도 50은 실시예에 따라서 고체 상태 냉각기능을 갖춘 CMUT 어레이를 제작하는 방법을 예시한다.
도 51은 실시예에 따른 수동 냉각(passive cooling)기능을 갖춘 의료 CMUT 장치를 예시한다.
도 52 내지 도 54는 도 51의 CMUT 장치의 상이한 예시적인 구성을 도시한다.
도 55는 실시예에 따른 수동 냉각기능으로 초음파 치료를 위한 시스템을 예시한다.
도 56은 실시예에 따른 수동 냉각기능을 으로 초음파 치료를 위한 방법을 예시한다.
도 57은 실시예에 따라서 요도의 수동 냉각기능으로 전립선의 초음파 치료를 위한 방법을 예시한다.
도 2는 실시예에 따라서 CMUT 어레이 및 적어도 하나의 열전 냉각기를 갖는 CMUT-열전 냉각기(TEC) 장치를 예시한다.
도 3은 예시적인 사용 시나리오에서 그리고 표적 조직을 치료하기 위해 신체 채널에 배치되는 도 2의 CMUT-TEC 장치를 예시한다.
도 4는 실시예에 따라서 CMUT 어레이를 통해 하나 이상의 열전 냉각기를 비-표적 조직에 열적으로 커플링하는 CMUT-TEC 장치를 예시한다.
도 5는 실시예에 따라서 CMUT 어레이를 통해 하나 이상의 열전 냉각기를 비-표적 조직에 열적으로 커플링하는 다른 CMUT-TEC 장치를 예시한다.
도 6은 CMUT-TEC 장치가 신체 채널의 벽과 물리적으로 접촉하도록 크기가 정해지는 예시적인 사용 시나리오에서 도 4 및 도 5의 CMUT-TEC 장치의 예시적인 실시예를 예시한다.
도 7은 실시예에 따라서 CMUT-TEC 장치 및 CMUT-TEC 장치로부터 멀리 열을 전도하기 위한 고체 열 전도체를 포함하는 의료 장치를 예시한다.
도 8은 실시예에 따른 1 차원 CMUT 어레이를 예시한다.
도 9는 실시예에 따른 1.5D CMUT 어레이를 예시한다.
도 10은 실시예에 따른 1.75D CMUT 어레이를 예시한다.
도 11은 실시예에 따른 2 차원 CMUT 어레이를 예시한다.
도 12a 및 도 12b는 각각, 실시예에 따른 CMUT-TEC 장치의 단면도 및 평면도를 예시한다.
도 13은 실시예에 따라서 그 사이에 조정 가능한 각도를 갖는 2 개의 평면 CMUT 서브어레이를 갖춘 CMUT-TEC 장치를 예시한다.
도 14는 실시예에 따라서 그 사이에 조정 가능한 각도를 갖는 2 개의 평면 CMUT 서브어레이를 갖는 CMUT-TEC 장치를 예시한다.
도 15는 실시예에 따라서 서로로부터 멀어지게 경사진 2 개의 평면 CMUT 서브어레이를 갖춘 CMUT-TEC 장치를 예시한다.
도 16은 실시예에 따라서 서로로부터 멀어지게 경사진 2 개의 평면 CMUT 서브어레이를 갖춘 CMUT-TEC 장치를 예시한다.
도 17은 실시예에 따른 CMUT-TEC 변환기 장치를 갖춘 카테터를 예시한다.
도 18은 실시예에 따른 CMUT-TEC 장치를 갖춘 다른 카테터를 예시한다.
도 19, 도 20 및 도 21은 실시예에 따른 CMUT-TEC 장치를 갖춘 카테터를 예시한다.
도 22는 실시예에 따라서 제거 가능한 방식으로 CMUT 어레이 및 고체 상태 냉각기능을 갖춘 카테터를 감싸도록 구성된 카테터 슬리브를 예시한다.
도 23은 실시예에 따라서 CMUT-TEC 장치의 제거를 허용하는 관형 카테터 재킷을 사용하는 CMUT-TEC 장치를 갖춘 카테터를 예시한다.
도 24는 실시예에 따른 고체 상태 냉각기능을 갖춘 카테터 또는 카테터 슬리브를 예시한다.
도 25는 실시예에 따라서 그의 관형 벽에 커플링된 적어도 하나의 열전 냉각기를 갖는 카테터 또는 카테터 슬리브를 예시한다.
도 26은 실시예에 따라서 적어도 하나의 열전 냉각기 및 그의 관형 벽에 커플링된 고체 열 전도체를 가지는 카테터 또는 카테터 슬리브를 예시한다.
도 27a 및 도 27b는 실시예에 따른 열전 냉각기능을 갖춘 카테터 또는 카테터 슬리브를 예시한다.
도 28a 내지 도 28d는 실시예에 따른 열전 냉각기능을 갖춘 다른 카테터 또는 카테터 슬리브를 예시한다.
도 29는 실시예에 따라서 신체 채널의 일부분에 고정되는 동안 신체 채널 내부로부터 표적 조직의 초음파 치료를 위한 카테터를 감싸도록 구성된 카테터 슬리브를 예시한다.
도 30은 실시예에 따라서 방광에 고정되는 동안 요도 내부로부터 전립선의 초음파 치료를 위한 요도 카테터를 감싸도록 구성된 요도 카테터 슬리브를 예시한다.
도 31은 실시예에 따라서 신체 채널 내에 하나 이상의 통합 센서를 갖춘 카테터 슬리브를 예시한다.
도 32는 실시예에 따라서 그의 관형 케이싱에 하나 이상의 하드와이어 센서를 갖는 카테터 슬리브를 예시한다.
도 33은 실시예에 따라서 그의 관형 케이싱에 하나 이상의 무선 통신 기반 센서를 갖는 카테터 슬리브를 예시하며, 여기서 각각의 센서는 카테터 슬리브 내에 삽입된 카테터에 의해 판독된다.
도 34는 실시예에 따라서 그의 관형 케이싱에 적어도 하나의 센서를 갖는 카테터 슬리브를 예시하며, 여기서 각각의 센서는 카테터 슬리브에 삽입되고 센서와 전기 접촉되게 배치된 카테터에 의해 판독되도록 구성된다.
도 35는 실시예에 따른 초음파 치료 및 고체 상태 냉각기능을 위한 시스템을 예시한다.
도 36은 실시예에 따른 CMUT 어레이 및 고체 상태 냉각기능을 갖춘 의료 장치를 예시한다.
도 37은 실시예에 따른 CMUT 어레이, 고체 상태 냉각기능 및 관련 고체 상태 열 제거기능을 갖춘 의료 장치를 예시한다.
도 38은 실시예에 따라서 신체 채널에 고정되도록 구성된 카테터 슬리브를 포함한, CMUT 어레이 및 고체 상태 냉각기능을 갖는 의료 시스템을 예시한다.
도 39는 실시예에 따른 초음파 치료를 제어하기 위한 컴퓨터를 예시한다.
도 40은 실시예에 따른 향상된 초음파 치료 시스템을 예시한다.
도 41은 실시예에 따른 요도의 고체 상태 냉각기능으로 전립선의 향상된 초음파 치료를 위한 시스템을 예시한다.
도 42는 실시예에 따른 향상된 초음파 치료를 위한 다른 시스템을 예시한다.
도 43은 실시예에 따라서 요도의 고체 상태 냉각기능으로 전립선의 향상된 초음파 치료를 위한 다른 시스템을 예시한다.
도 44는 실시예에 따라서 고체 상태 냉각기능으로 초음파 치료를 위한 방법을 예시한다.
도 45는 실시예에 따라서 요도의 고체 상태 냉각기능으로 전립선의 초음파 치료를 위한 방법을 예시한다.
도 46은 실시예에 따라서 초음파 이미징 피드백으로 초음파 치료를 위한 방법을 예시한다.
도 47은 실시예에 따라서 초음파 이미지 피드백으로 초음파 치료를 제어하기 위한 시스템을 예시한다.
도 48은 실시예에 따라서 고체 상태 냉각기능으로 표적 조직의 초음파 치료를 위한 프로토콜을 예시한다.
도 49는 실시예에 따라서 CMUT 어레이의 여러 상이한 위치/방위를 요구하는 정도로 표적 조직의 치료를 관리하기 위해 도 48의 프로토콜과 함께 이용되도록 구성된 그래픽 사용자 인터페이스를 예시한다.
도 50은 실시예에 따라서 고체 상태 냉각기능을 갖춘 CMUT 어레이를 제작하는 방법을 예시한다.
도 51은 실시예에 따른 수동 냉각(passive cooling)기능을 갖춘 의료 CMUT 장치를 예시한다.
도 52 내지 도 54는 도 51의 CMUT 장치의 상이한 예시적인 구성을 도시한다.
도 55는 실시예에 따른 수동 냉각기능으로 초음파 치료를 위한 시스템을 예시한다.
도 56은 실시예에 따른 수동 냉각기능을 으로 초음파 치료를 위한 방법을 예시한다.
도 57은 실시예에 따라서 요도의 수동 냉각기능으로 전립선의 초음파 치료를 위한 방법을 예시한다.
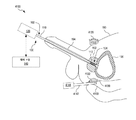
도 1은 용량성 미세기계가공 초음파 변환기(CMUT) 어레이 및 고체 상태 냉각기능을 갖춘 하나의 의료 장치(100)를 예시한다. 장치(100)는 신체 공동(body cavity), 덕트(duct) 또는 용기로부터 신체 조직을 치료하도록 구성되고; 본 명세서에서 총칭하여 "신체 채널(body channel)"로 지칭된다.
도 1의 실시예에서, 의료 장치(100)는 요도(194)와 같은 신체 채널 내로 삽입되도록 구성된 카테터(110)를 포함한다. 의료 장치(100)는 카테터(110)의 근위 단부(102)에 기계적으로 커플링되고 카테터(110)를 적어도 부분적으로 제어하기 위해 신체 채널 외부에 위치되도록 구성되는 핸들(120)을 더 포함한다. 카테터(110)는 그의 원위 단부(104)에 또는 그 근처에, CMUT 어레이(112) 및 고체 상태 냉각기능을 제공하는 적어도 하나의 열전 냉각기(TEC)(114)를 갖는 CMUT-열전 냉각기 장치(116)를 포함한다. 카테터(110)를 조절함으로써, CMUT-TEC 장치(116)는 초음파로 치료될 대상자(190)의 표적 조직의 작업 거리 내에 위치될 수 있다.
작동시, CMUT 어레이(112)는 전립선(192)과 같은 표적 조직에 초음파를 방출하여, 예를 들어 표적 조직의 괴사를 유도하고, 열전 냉각기(114)는 초음파에 의해 가열되는 비-표적 조직을 냉각시켜 비-표적 조직에 대한 열-유도 손상을 방지한다. 비-표적 조직은 초음파에 대한 직접 노출에 의해 및/또는 표적 조직 또는 초음파에 노출된 다른 조직으로부터 비-표적 조직으로의 열 전파에 의해 가열될 수 있다.
도 1은 하나의 예시적인 시나리오에서, 요도로부터 전립선 또는 전립선의 일부를 초음파에 노출시키기 위한 의료 장치(100)를 도시한다. 이러한 예시적인 시나리오에서, 의료 장치(100)는 예를 들어, 방광(196)으로부터 소변의 흐름을 개선하기 위해 양성 전립선 비대증(BPH)을 치료할 수 있거나; 장치(100)는 전립선 암을 치료할 수 있다. 의료 장치(100)의 특정 실시예는 BPH 및 전립선 암의 조합을 치료할 수 있다. 이들 상태 중 어느 것이 치료될지에 관계없이, CMUT 어레이(112)는 전립선 조직에 초음파를 방출하도록 작동할 수 있는 반면에, 열전 냉각기(114)는 요도에 대한 열-유도 손상을 방지하기 위해 요도 벽의 적어도 일부분을 냉각시킨다. 그러나, 본 발명의 범주로부터 벗어남이 없이, 의료 장치(100)는 다른 시나리오에서, 요도와 상이한 신체 채널로부터 다른 유형의 신체 조직을 치료하기 위해 사용될 수 있다.
CMUT 어레이(112)는 CMUT 셀(150)의 어레이를 포함한다. 일 실시예에서, CMUT 셀(150)은 CMUT 요소의 어레이로 구성된다. 각각의 CMUT 요소는 단일의 더 큰 CMUT 셀로서 협력하여 기능을 하기 위해 일체로 구동되도록 구성된 복수의 CMUT 셀(150)을 포함한다. 도 1은 CMUT 셀(150)의 하나의 예시적인 실시예를 개략적으로 예시한다. 이러한 실시예에서, 각각의 CMUT 셀(150)은 기판(180), 내부에 형성된 공동(172)을 갖는 전기 절연 층(170), 상부에 배치된 전극(162)을 갖춘 막(160), 및 선택적으로 전극(162)과 막(160) 위에 배치된 보호/전기 절연 층(164)을 포함한다. 함께, 층(170)과 막(160)은 공동(172) 내에 진공을 함유할 수 있거나; 층(170)과 막(160)은 공동(172) 내에 대기압 미만의 가스를 함유할 수 있다. 적절한 주파수의 시변 전압 강하가 바닥 전극으로서 기능을 하는 전극(162)과 기판(180) 사이에 인가될 때, 전극(162)과 기판(180) 사이의 결과적인 전계는 막(160)이 진동하여 초음파를 발생하게 할 것이다. 특정 실시예에서, 기판(180)은 실리콘 기판이고, 전기 절연 층(170)과 막(160) 각각은 실리콘-계이다. 대안적으로, 막(160)은 나노 튜브-기반 막일 수 있다. 본 발명의 범주를 벗어남이 없이, CMUT 셀(150)은 상이한 구성일 수 있다. 예를 들어, CMUT 셀(150)은 추가 층을 포함할 수 있고/있거나 공동(172)이 공동(172)의 바닥에 배치된 전극을 갖춘 유리 기판 내에 형성될 수 있다.
CMUT 셀(150)은 조금이라도 있다면, 매우 적은 열을 발생시킨다. 대조적으로, 전형적인 압전 변환기에 전달된 전기 에너지의 약 40 %는 (압전 변환기의 유전 상수의 가상 부분에 의해 지시된 바와 같이)압전 재료에서 마찰로 손실되고, 따라서 압전 변환기 자체에서 상당한 양의 열을 발생시킨다. 결과적으로, 압전 변환기를 사용하여 압전 변환기로부터 떨어진 거리에 표적 조직(예를 들어, 전립선 조직)을 가열할 때, 압전 변환기에서 발생된 열은 일반적으로 초음파에서 유도된 열보다 크거나 크지 않다. 따라서, 압전 변환기 근처의 조직이 표적 조직의 일부가 아니고, 이 조직의 가열에 의해 바람직하지 않은 손상이 초래되면, 압전 변환기 및/또는 인접한 조직을 냉각시키기 위해 압전 변환기의 위치에서 상당한 냉각이 적용되어야 한다. 압전 변환기를 사용하여 전립선의 초음파 치료를 목적으로 하는 요도 카테터의 경우에, 압전 변환기 및/또는 압전 변환기 근처의 요도 벽의 액체 냉각은 요도 벽의 손상을 방지하기 위해 초음파 처리를 수반해야 한다. 결과적으로, 그러한 카테터에는 요도 카테터를 통해 차가운 액체를 압전 변환기의 부위로 운반하는 냉각 유체 회로가 장착되어야 하며, 여기서 차가운 액체는 카테터를 통해 요도 밖으로 다시 전달되기 전에 일부 열을 흡수할 수 있다. 그러한 냉각 유체 회로는 카테터에 복잡성과 부피를 증가시키고, 외부 액체를 환자에게 도입하는 것과 관련된 안전 규제 요건과 또한 관련된다. 유리하게, CMUT 셀(150)의 무시할만한 열 발생으로 인해 현재 개시된 초음파 변환기(116)는 훨씬 낮은 냉각 용량으로 안전하게 작동할 수 있다. 열전 냉각기(114)에 의해 제공되는 바와 같은 고체 상태 냉각이면 충분하다. 고체 상태 냉각은 높은 정도의 온도 제어를 제공한다. 열전 냉각기에 의해 제공된 냉각이 펠티어(Peltier) 효과에 의해 관리되기 때문에, 열전 냉각기가 즉시 켜지고 꺼질 수 있고 냉각 정도가 쉽게 조절될 수 있다. 대조적으로, 열 저장소와의 수동 열 교환에 기초한 냉각, 예를 들어 수냉 또는 다른 액체 냉각은 냉각제의 열 질량으로 인한 저속 온/오프 전이와 관련된다. 따라서, 열전 냉각기(114)의 작동은 CMUT 어레이(112)에 의한 초음파 처리 동안 필요에 따라 쉽고 빠르게 조절될 수 있다. 예를 들어, 과냉각을 방지하거나 보상하기 위해 필요하다면, 비-표적 조직을 가열하기 위해 열전 냉각기(114)를 역으로 구동하는 것도 심지어 가능하다.
도 1의 실시예에서, 의료 장치(100)는 초음파 치료 시스템(130)의 제어 모듈(140)과 통신 가능하게 커플링되며, 핸들(120)은 CMUT 어레이(112) 및 열전 냉각기(114)의 작동과 관련된 전자 회로를 포함한다. 제어 모듈(140)은 치료 절차에 따라 CMUT 어레이(112) 및 열전 냉각기(114)를 작동시키도록 핸들(120)의 전자 회로를 제어한다. 본 발명의 범주를 벗어남이 없이, 핸들(120)의 전자 회로는 대신에, 핸들(120) 외부의 제어 모듈(140)과 또는 제어 모듈(140)에 통합되거나, 제어 모듈(140)은 핸들(120)의 전자 회로와 함께 핸들(120)로 구현될 수 있다.
표적 조직(예를 들어, 전립선(192))을 치료하기 위해 초음파를 발생하는 것 이외에, CMUT 어레이(112)는 표적 조직(또는 CMUT 어레이(112)의 시야에 있는 다른 조직)의 초음파 이미징을 수행할 수 있다. 일 예에서, 제어 모듈(140)은 CMUT 어레이(112)에 의해 기록된 표적 조직의 초음파 이미지를 이용하여 표적 조직의 초음파 치료의 진행을 평가하고 이러한 평가에 따라 CMUT 어레이(112)에 의한 표적 조직의 초음파 노출을 조정한다. 치료 프로토콜의 일 예에서, 제어 모듈(140)은 CMUT 어레이(112)에게 (a) 표적 조직을 가열하기 위해 높은 에너지 레벨에서 초음파를 방출하는 것과 (b) 더 낮은 에너지 레벨에서 초음파를 방출하고 조직에 의해 CMUT 어레이(112)로 다시 반사된 초음파를 검출함으로써 표적 조직(및/또는 CMUT 어레이(112)의 시야에 있는 다른 조직)을 이미지화하는 것 사이에서 교대하도록 명령한다.
도 2는 CMUT 어레이(210) 및 적어도 하나의 열전 냉각기(220)를 갖는 하나의 CMUT-TEC 장치(200)를 예시한다. CMUT-TEC 장치(200)는 예를 들어, 도 1의 초음파 변환기(116)의 실시예이다. 대안적으로, CMUT-TEC 장치(200)는 다른 카테터에 전개될 수 있다. 또는, CMUT-TEC 장치(200)는 예를 들어, 환자의 피부 또는 수술로 노출된 표면에 배치하기 위해 카테터없이 작동하도록 구성될 수 있다.
CMUT 어레이(210)는 초음파 방출 면(212)으로부터 표적 조직(280)으로 초음파(270)를 방출하도록 구성된 CMUT(150)의 어레이를 포함한다. 열전 냉각기(220)는 초음파(270)에 의해 직접적으로 또는 간접적으로 가열된 비-표적 조직(290)을 펠티어 효과에 의해 냉각시키도록 구성된다.
특정 실시예에서, CMUT-TEC 장치(200)는 비-표적 조직(290) 및/또는 표적 조직(280)의 하나 이상의 특성을 감지하는 하나 이상의 센서(230)를 포함한다. 센서(230)는 예를 들어, 온도, 압력 또는 둘 모두를 감지할 수 있다. 각각의 센서(230)는 예를 들어, 고체 상태 온도 센서 또는 고체 상태 압력 센서와 같은 고체 상태 센서이다.
따라서, 센서(들)(230)는 비-표적 조직(290)에 대한 초음파(270)의 직접 또는 간접 효과를 나타내는 하나 이상의 특성을 감지할 수 있다. 예를 들어, 조작자 또는 자동 제어기는 비-표적 조직(290)의 특성이 허용 가능한 범위, 예컨대 임계 온도를 초과하는 온도 또는 임계 압력을 초과하는 압력 밖에 있음을 센서(들)(230)가 감지할 때 CMUT 어레이(210)에 의해 초음파(270)의 방출을 적어도 일시적으로 중단, 감소 또는 재지향시킬 수 있다. 요도(194)로부터 전립선(192)의 초음파 치료와 관련된 하나의 사용 시나리오에서, 임계 온도는 요도(194)에 대한 손상을 방지하기 위해 41 ℃ 내지 45 ℃의 범위 내, 예컨대 42 ℃이다. 표적 조직(280) 및 잠재적으로 또한 비-표적 조직(290)의 가열은 조직의 팽창을 유발할 수 있다. 조작자 또는 자동 제어기는 센서(들)(230)가 임계 압력을 초과하는 압력을 감지할 때 CMUT 어레이(210)에 의해 초음파(270)의 방출을 적어도 일시적으로 중단, 감소 또는 재지향시킬 수 있어서, 팽창 정도를 특정 수준 아래로 유지한다. 조작자 또는 자동 제어기는 또한, 센서(들)(230)에 의해 제공된 온도 측정에 기초하여 열전 냉각기(114)의 작동을 조정할 수 있다.
다른 실시예에서, 센서(들)(230)는 초음파(270)에 의한 표적 조직(280)의 치료 진행을 나타내는 하나 이상의 특성을 감지한다. 예를 들어, 센서(들)(230)는 표적 온도와 표적 조직(280)의 측정된 온도 사이의 차이의 평가를 용이하게 하기 위해 표적 조직(280)의 온도를 감지 할 수 있고; 센서(들)(230)는 열 모델을 사용하여 표적 조직(280)으로의 역전파와 함께 이러한 측정된 온도로부터 표적 조직(280)의 적어도 대략적인 온도의 추론을 용이하게 하기 위해 비-표적 조직(290)의 온도를 감지할 수 있고/있거나; 센서(들)(230)는 표적 조직(280) 및/또는 비-표적 조직(290)의 압력을 감지하여 조직의 열-유도 팽창에 대해 공지된 특성과 함께 측정된 압력으로부터 표적 조직(280)의 가열의 평가를 용이하게 할 수 있다. 하나의 사용 시나리오에서, 센서(들)(230)에 의해 수행된 측정에 기초하여 얻어진 정보는 초음파 이미지로부터 얻어진 정보와 조합되어 표적 조직(280)의 괴사, 온도 및/또는 부피와 같은 표적 조직(280)의 특성을 결정한다. 초음파 이미지는 CMUT 어레이(210)를 사용하여 얻어질 수 있다.
도 2는 CMUT 어레이(210), 열전 냉각기(220) 및 포함될 때, 센서(들)(230)를 유지하는 고정구(260)를 도시한다. 고정구(260)는 예를 들어, 카테터 재킷(jacket)이다. 고정구(260)는 적어도 부분적으로 초음파(270)를 전송하는 CMUT 어레이(210) 위에 위치한 윈도우(window)를 포함할 수 있다.
열전 냉각기(들)(220)는 (a) 비-표적 조직(290)과 직접적인 열 연결되어 있거나, (b) 고정구(260)를 통해 비-표적 조직(290)과 간접적인 열 연결되어 있거나, (c) CMUT 어레이(210) 및 선택적으로 고정구(260)를 통한 비-표적 조직(290)과 간접적인 열 연결될 수 있다. 바람직하게, 각각의 열전 냉각기(220)는 CMUT 어레이(210)로부터 표적 조직(280)으로 초음파(270)의 전파 영역 외부에 위치된다. 센서(230)는 예를 들어, 고정구(260) 및/또는 CMUT 어레이(210)에 위치된다.
도 2에 도시되지 않지만, CMUT-TEC 장치(200)는 CMUT 어레이(210) 및 각각의 열전 냉각기(220)(및 선택적으로 또한 각각의 센서(230))를 CMUT-TEC 장치(200) 외부에 위치된 외부 전자 회로에 연결하는 전기 연결부를 구비할 수 있음을 이해해야 한다. CMUT-TEC 장치(200)가 카테터(110)에 구현될 때, CMUT-TEC 장치(200)와 외부 전자 회로 사이의 전기적 연결은 카테터(110)를 통해 핸들(120)로 진행할 수 있다. 일 예에서, 외부 전자 회로는 CMUT 어레이(210) 및 각각의 열전 냉각기(220)(및 선택적으로 각각의 센서(230))를 구동하고, 또한 CMUT 어레이(210)로부터 초음파 이미징 신호 및/또는 센서(들)(230)로부터 센서 신호를 수신할 수 있다. 대안적으로, 전자 회로의 일부분은 CMUT-TEC 장치(200)에 위치된다.
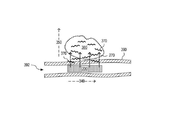
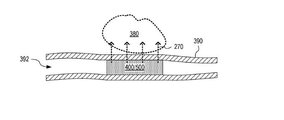
도 3은 예시적인 사용 시나리오에서 CMUT-TEC 장치(200)를 예시하며, 여기서 CMUT-TEC 장치(200)는 표적 조직(380)을 치료하기 위해 신체 채널(392)에 위치된다. 신체 채널(392)은 벽(390)을 가진다. CMUT 어레이(210)는 표적 조직(380)에 초음파(270)를 방출한다. 초음파(270)는 표적 조직(380)에서 열(370)로 적어도 부분적으로 변환된다. 열(370)의 일부분은 인접한 비-표적 조직으로 확산할 수 있다. 또한, CMUT-TEC 장치(200)와 벽(390)과 같은 표적 조직(380) 사이의 비-표적 조직은 초음파(270)에 직접 노출되어 이러한 비-표적 조직에서 일부 양의 열(370)을 직접 발생시킨다. 열전 냉각기(들)(220)는 벽(390)에 대한 열-유도 손상을 방지하기 위해 벽(390)의 적어도 일부분을 냉각시킨다.
도 4는 CMUT 어레이(210)를 통해 열전 냉각기(들)(220)를 비-표적 조직(290)에 열적으로 커플링하는 하나의 CMUT-TEC 장치(400)를 예시한다. CMUT-TEC 장치(400)는 도 2의 CMUT-TEC 장치(200)의 실시예이다. 열전 냉각기(들)(220)는 CMUT 어레이(210)와 직접 또는 간접적인 열 커플링(480) 상태에 있으며, 이는 표적 조직(280)으로 초음파(270)를 방출하도록 위치될 때 비-표적 조직(290)과 열 커플 링(470) 상태에 있다. CMUT 어레이(210)는 비-표적 조직(290)과 직접적인 열 커플 링(470) 상태에 있거나, 고정구(260)를 통해 비-표적 조직(290)과 간접적인 열 커플링(470) 상태에 있을 수 있다. 일 실시예에서, CMUT 어레이(210)의 초음파 방출 면(212)은 비-표적 조직(290)과 열 커플링(470) 상태에 있고, 열전 냉각기(들)(230)는 초음파 방출 면(212)에 대향하는 CMUT 어레이(210)의 측면과 열 커플링(480) 상태에 있다. 따라서, CMUT 어레이(210)는 열전 냉각기(들)(230)와 비-표적 조직(290) 사이에 열 경로를 제공한다.
작동시, 전압 강하가 열전 냉각기(들)(220)에 인가되어 펠티어 효과를 통해 고온 측(424)과 저온 측(422)을 생성한다. 전압 강하의 방향은 각각의 열전 냉각기(220)의 저온 측(422)이 비-표적 조직(290)과 열 커플링(470) 상태에 있는 CMUT 어레이(210)와 열 커플링(480) 상태에 있다.
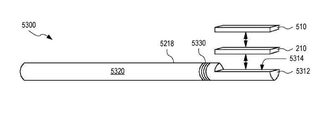
도 5는 CMUT 어레이(210)를 통해 비-표적 조직(290)에 열전 냉각기(220)를 열적으로 커플링하여, 열전 냉각기(들)(220)가 CMUT 어레이(210)를 통과하는 열 경로를 통해 비-표적 조직(290)을 냉각시키도록 구성된 다른 CMUT-TEC 장치(500)를 예시한다. CMUT-TEC 장치(500)는 도 4의 CMUT-TEC 장치(400)의 실시예이다. CMUT-TEC 장치(500)는 CMUT 어레이(210)의 초음파 방출 면(212)에 커플링된 렌즈(510)를 포함한다. 렌즈(510)는 예를 들어, 표적 조직(280)에 초음파(270)를 포커싱한다. 일 실시예에서, CMUT-TEC 장치(500)는 연장되고 도 1의 카테터(110)와 같은 카테터에서 구현하도록 구성되며, 여기서 연장된 치수(도 3의 연장된 치수(340) 참조)는 카테터의 종축과 정렬된다. 이러한 실시예에서, 렌즈(510)는 상승 방향(도 3의 상승 방향(350) 참조)에서 특정 거리에 초음파(270)를 포커싱하며; 즉, 렌즈(510)는 CMUT-TEC 장치(500)의 연장된 치수(340)에 수직인 방향을 따라 초음파(270)의 방출을 조작한다. 작동시, 렌즈(510)는 선택적으로 고정구(260)를 통해 비-표적 조직(290)과 물리적으로 접촉하고, 따라서 CMUT 어레이(210)와 비-표적 조직(290) 사이에 열 커플링을 제공한다. 렌즈(510)는 열전 냉각기(들)(220)와 비-표적 조직(290) 사이의 열 경로의 일부를 형성한다. 도 5에 도시된 실시예에서, 열전 냉각기(들)(220)는 초음파 방출 면(212)과 반대인 CMUT 어레이(210)의 측면에 장착되거나 그와 공동으로 제작된다. 그러나, 본 발명의 범주를 벗어남이 없이, 열전 냉각기(들)(220)는 (a) CMUT 어레이(210)의 다른 측면, (b) 고정구(260), 또는 (c) CMUT-TEC 장치(500)가 구현되는 카테터의 튜브에 장착되거나 그와 함께 제작될 수 있다.
일 실시예에서, 열전 냉각기(들)(220)는 열 접착제에 의해 CMUT 어레이(210)에 접합된다. 다른 실시예에서, 열전 냉각기(들)(220)는 CMUT 어레이(210)에 접촉 접합된다. 또 다른 실시예에서, 고정구(260)는 CMUT 어레이(210)와 물리적으로 접촉하게 열전 냉각기(220)를 유지한다. 본 발명의 범주를 벗어남이 없이, 중간 기판(예를 들어, CMUT 어레이(210)와 열전 냉각기(들)(220) 중 하나 또는 둘 모두를위한 전기 연결을 포함함)은 CMUT 어레이(210)와 열전 냉각기(들)(220) 사이에 위치될 수 있다. 다른 실시예에서, CMUT 어레이(210)는 열전 냉각기(들)(220)에 직접적으로 제작된다.
렌즈(510)는 폴리디메틸실록산(예를 들어, 실가르드(Sylgard), 예를 들어, 실가르드(160))과 같은 실리콘 고무 또는 폴리디메틸실록산보다 초음파 감쇠 계수가 낮은 다른 실리콘 고무(예를 들어, 실온-가황 실리콘, 예를 들어 Momentive RTV-615)로 실질적으로 구성될 수 있다. 낮은 초음파 감쇠 계수를 특징으로 하는 렌즈 재료는 렌즈(510)에 의해 흡수된 초음파의 양을 감소시켜, (a) 표적 조직(280)으로의 초음파 전달을 최대화하고 (b) 렌즈(510)의 초음파 유도 가열로부터 비-표적 조직(290)의 가열을 최소화한다. CMUT-TEC 장치(500)가 요도(194)로부터 전립선(192)의 초음파 치료를 위한 요도 카테터에서의 구현을 위해 구성될 때, 렌즈(510)의 초점 길이는 10 mm 내지 20 mm의 범위 내에, 예컨대 15 mm일 수 있다.
도 6은 예시적인 사용 시나리오에서 CMUT-TEC 장치(400 또는 500)의 일 구현예를 예시하며, CMUT-TEC 장치(400/500)는 표적 조직(380)을 치료하기 위해 신체 채널(392)에 위치될 때, CMUT-TEC 장치(400/500)가 벽(390)과 물리적으로 접촉하여 CMUT-TEC 장치(400/500)와 벽(390) 사이에 물리적 접촉을 보장하도록 크기가 정해진다. CMUT-TEC 장치(400/500)의 이러한 구현예는 CMUT 어레이(210) 및 렌즈(510)(및 선택적으로 고정구(260))를 통해 열전 냉각기(들)(220)의 저온 측(422)과 벽(390) 사이의 열 커플링을 보장한다.
도 7은 (CMUT 어레이(210) 및 열전 냉각기(220)를 가지는)CMUT-TEC 장치(200) 및 CMUT-TEC 장치(200)로부터 열을 전도시키는 고체 열 전도체(710)를 포함하는 하나의 의료 장치(700)를 예시한다. 의료 장치(700)는 도 4의 CMUT-TEC 장치(400)의 실시예이다. 고체 열 전도체(710)는 각각의 열전 냉각기(220)의 고온 측(424)에 열적으로 커플링된다. 열전 냉각기(220)가 비-표적 조직(290)을 냉각함에 따라서, 열은 고온 측(424)으로 전달되어, 고체 열 전도체(710)에 의해 열전 냉각기(220)로부터 멀리 전도된다.
일 실시예에서, 고체 열 전도체(710)는 구리, 은 및/또는 알루미늄과 같은 금속을 포함하거나 실질적으로 이들로 구성된다. 일 예에서, 고체 열 전도체(710)는 구리 로드와 같은 금속 로드이다. 다른 예에서, 고체 열 전도체(710)는 복수의 편조 구리 와이어와 같은 복수의 편조 금속 와이어를 포함한다. 편조 금속 와이어는 예를 들어, 고체 금속 전도체(710)에 이용 가능한 경로가 직선이 아닌 경우에, 고체 금속 전도체(710)가 구부러지게 하도록 구성될 수 있다. 그러한 유연성은 고체 열 전도체(710)가 신체 채널(392)을 통과하는 카테터를 따라 위치될 때, 특히 고체 금속 전도체(710)가 연장된 기간 동안 신체 채널(392)에 배치되거나 카테터의 재위치 설정/재방위가 요구되는 상황에서 환자 편의를 유리하게 개선할 수 있다. 다른 실시예에서, 고체 열 전도체(710)는 비금속 열 전도체, 예를 들어 열 전도성 나노섬유와 같은 열 전도성 나노재료를 포함하거나 이로 실질적으로 구성된다. 또 다른 실시예에서, 고체 열 전도체(710)는 열 전도성 나노복합물을 포함하거나 이로 실질적으로 구성된다. 다른 실시예에서, 고체 열 전도체(710)는 메타재료(metamaterial)를 포함하거나 이로 실질적으로 구성된다.
고체 열 전도체(710)는 의료 장치(700)를 넘어 연장하여 의료 장치(700)로부터 더 멀리 열(780)을 전도할 수 있다. 예를 들어, 카테터(110)에서 구현될 때, 고체 열 전도체(710)는 열전 냉각기(들)(220) 및 비-표적 조직(290)으로부터 열(780)을 제거하기 위해 근위 단부(102) 쪽으로 적어도 부분적으로 연장할 수 있다. 열(780)은 카테터(110)의 길이의 일부분을 따라 분배되고/되거나 고체 열 전도체(710)에 의해 카테터(110) 외부에, 예를 들어 핸들(120) 내에 위치된 열 교환기(도시되지 않음)로 전도된다.
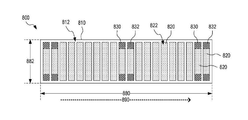
도 8은 하나의 1 차원(1D) CMUT 어레이(800)를 예시한다. 도 8은 1D CMUT 어레이(800)의 초음파 방출 면(812)의 평면도를 도시한다. 1D CMUT 어레이(800)는 CMUT 어레이(210) 및 CMUT 어레이(112)의 실시예이다. 1D CMUT 어레이(800)는 축(890)을 따라 배열된 CMUT 요소(820)의 1D 어레이를 갖는 기판(810)(예를 들어, 실리콘 기판)을 포함한다. 설명의 명확성을 위해, 모든 CMUT 요소(820)가 도 8에 표시되지 않았다. 축(890)은 관련된 장치가 카테터(110)에서 구현될 때 카테터(110)의 종축에 실질적으로 평행한 방향을 지칭한다. 여기서, 카테터(110)의 종축은 근위 단부(102)로부터 원위 단부(104)로 카테터(110)에 의해 설명된 일반적인 경로를 지칭한다. 이러한 경로는 직선일 수 있고 아닐 수도 있으며, 따라서 카테터(110)의 종축의 방향은 근위 단부(102)와 원위 단부(104) 사이의 경로를 따라 변할 수 있다.
1D CMUT 어레이(800)는 축(890)을 따르는 범위(880) 및 축(890)에 수직한 방향으로의 범위(882)를 가진다. 일 실시예에서, 범위(880)는 범위(882)보다 더 크므로, 1D CMUT 어레이(800)는 축(890)을 따라 신장된다. 신체 채널(392)의 길이를 따라 일반적으로 지향된 축(890)을 갖는 신체 채널(392) 내로 삽입되도록 의도된 CMUT 어레이(800)의 실시예의 경우(도 3 참조), 범위(882)는 신체 채널(392)의 폭에 의해 한정될 수 있지만, 범위(880)는 신체 채널(392)의 길이를 따른 방향으로 표적 조직(380)의 전형적인 범위에 기초하여 구성될 수 있다. 요도 카테터에서의 구현에 적합한 일 실시예에서, 범위(882)는 2.5 내지 3.5 밀리미터 범위 또는 3.0 내지 3.2 밀리미터 범위이고, 범위(880)는 10 내지 50 밀리미터 범위에 있다. 예를 들어, 0.2 밀리미터의 중심-대-중심 간격을 갖는 128 개의 CMUT 요소(820)를 갖춘 실시예에서, 범위(880)는 대략 1 인치이다. 요도 카테터에서의 구현에 적합한 다른 실시예에서, 범위(882)는 5 밀리미터 이하이다.
CMUT 요소(820)의 수는 본 발명의 범주로부터 벗어남이 없이, 도 8에 도시된 것과 상이할 수 있다. 예를 들어, 1D CMUT 어레이(800)는 128 또는 256 개의 CMUT 요소(820)를 포함할 수 있다. 각각의 CMUT 요소(820)는 도 3에 도시된 바와 같이 긴 직사각형의 형상을 가질 수 있거나, 사각형, 원형 또는 타원형과 같은 상이한 형상을 가질 수 있다.
각각의 CMUT 요소(820)는 하나 이상의 CMUT 셀(150)을 포함한다. CMUT 요소(820)의 각각의 CMUT 셀(150)에서, 막(160)은 초음파 방출 면(812)과 동일한 방향을 향하는 CMUT 요소(820)의 측면(822)에 전극(162)을 가진다. (명확성을 위해 도 8에 도시되지 않은)각각의 CMUT 셀(150)의 전극(162)에 대한 전기 연결은 초음파 방출 면(812)에 위치되거나, 기판(810)을 통해 초음파 방출 면(812) 반대쪽의 기판(810)의 측면으로 통과할 수 있다. CMUT 요소(820)의 각각의 CMUT 셀(150)에서, 기판(180)(도 1 참조)은 1D CMUT 어레이(800)의 모든 CMUT 셀(150) 사이에 공유되고 단일 전기 연결을 갖는 기판(810)의 층일 수 있다. 이러한 층은 초음파 방출 면(812)과 대향하는 기판(810)의 측면으로부터 CMUT 요소(820)의 전극(162)에 웨이퍼를 통한 전기 연결에 의해 차단될 수 있다. 1D CMUT 어레이(800)가 카테터(110)에서 구현될 때, 유연한 케이블은 1D CMUT 어레이(800)의 전기 연결을 CMUT 요소(820)를 구동하도록 구성된 전자 회로에 연결할 수 있다. 이러한 전자 회로는 예를 들어, 핸들(120)에 위치되거나 주문형 집적 회로(ASIC)의 형태로 CMUT-TEC 장치(116)에 통합된다.
1D CMUT 어레이(800)는 초음파(270)의 빔포밍(beamforming)과 호환되며, 여기서 CMUT 요소(820) 중 일부는 다른 CMUT 요소(820)에 의해 수신된 것과 비교하여 위상 변위된 전기 구동 신호를 수신한다. 하나의 빔포밍 시나리오에서, CMUT 요소(820)는 8 개의 상이한 그룹으로 분할된다. 동일한 그룹에 속하는 모든 CMUT 요소(820)는 동일한 전기 구동 신호를 수신하지만, 다른 그룹의 CMUT 요소(820)는 상이한 전기 구동 신호를 수신할 수 있다. CMUT 요소(820)가 더 많거나 더 적은 그룹으로 분할될 수 있지만, 8 개의 상이한 그룹이 1D CMUT 어레이(800)에 의해 발생된 빔포밍 초음파의 충분한 공간 해상도를 제공하는 것으로 밝혀졌다.
하나의 사용 시나리오에서, CMUT 요소(820) 중 일부는 표적 조직(280)을 치료하기 위해 초음파(270)를 발생하는데 전용인 반면에, 다른 CMUT 요소(820)는 표적 조직(280)의 초음파 이미징을 수행한다. 다른 사용 시나리오에서, CMUT 요소(820) 중 적어도 일부는 일부 기간 동안 표적 조직(280)의 치료를 위해 초음파를 발생할 수 있고, 다른 기간 동안 표적 조직(280)의 초음파 이미징을 수행할 수 있다.
특정 실시예에서, 1D CMUT 어레이(800)는 초음파 방출 면(812)에 배치되거나 초음파 방출 면(812) 내의 또는 그 근처의 기판(810)에 형성된 하나 이상의 센서(830/832)를 더 포함한다. 예시의 명확성을 위해, 모든 센서(830/832)가 도 8에 표시되지 않았다. 각각의 센서(830/832)는 센서(230)의 실시예이고 1D CMUT 어레이(800) 근처에서 조직의 특성을 감지한다. 일 실시예에서, 1D CMUT 어레이(800)는 하나 이상의 온도 센서(830) 및/또는 하나 이상의 압력 센서(842)를 포함한다. 센서(830/832)는 도 8에 도시된 바와 같이, CMUT 요소(820)에 의해 점유된 초음파 방출 면(812)의 일부분 내에 위치되거나, 대안적으로 초음파 방출 면(812)의 이러한 부분 외부에 위치될 수 있다. 도 2에 도시된 실시예에서, 센서(830/832)의 존재는 일부 CMUT 요소(820)의 활성 구역을 축소시킨다. 본 발명의 범주를 벗어남이 없이, 모든 CMUT 요소(820)는 동일한 크기일 수 있고, 센서(830/832)는 다른 CMUT 요소(820)와 비교하여 일부 CMUT 요소(820)의 크기를 공간적으로 제한함이 없이 초음파 방출 면(812)에 위치된다.
1D CMUT 어레이(820)는 렌즈(510)가 CMUT 어레이(800)에 의해 방출된 초음파(270)의 범위를 축(890)에 수직한 치수로 조작하도록 CMUT-TEC 장치(500)에서 구현될 수 있다. 이러한 구현예에서, 초음파(270)의 빔포밍(beamforming)은 렌즈(510)의 작용과 조합되어 초음파(270)의 2 차원 포커싱을 달성할 수 있다.
도 9는 1.5D CMUT 어레이(900)를 예시한다. 도 9는 1.5D CMUT 어레이(900)의 초음파 방출 면(812)의 평면도를 도시한다. 1.5D CMUT 어레이(900)는 CMUT 어레이(210) 및 CMUT 어레이(112)의 실시예이다. "1.5D"는 빔포밍 분야에서의 기술 용어이다. 1.5D 변환기 어레이는 (a) 1 차원에서 높은 공간 해상도 및 직교 2 차원에서 훨씬 더 제한된 공간 해상도를 가지며, (b) 제 1 치수와 평행하고 제 2 치수의 중심에 있는 선에 대해 대칭적인 방식으로 작동되는 2 차원 변환기 어레이이다. 예를 들어, 1.5D 변환기 어레이는 3 x 128 또는 3 x 256 변환기를 갖춘 어레이를 형성하기 위해 각각의 행에 128 또는 256 변환기를 갖춘 3 개의 행을 가질 수 있다.
1.5D CMUT 어레이(900)는 CMUT 요소(820)의 1 차원 어레이가 3 행의 CMUT 요소: 중앙 행(930)의 CMUT 요소(920) 및 2 개의 외부 행(932)의 CMUT 요소(922)로 대체되는 것을 제외하면 1D CMUT 어레이(800)와 유사하다. 각각의 행(930 및 932)은 CMUT 요소(920/922)의 3 x N 어레이를 형성하기 위해 N CMUT 요소(920/922)(여기서, N은 128 또는 256과 같이 상당히 큰 정수임)를 가진다. CMUT 요소(922)는 CMUT 요소(820)와 유사하지만, 축(890)에 수직인 방향으로 더 작은 범위를 가질 수 있다. CMUT 요소(920)는 축(890)에 수직인 방향으로 CMUT 요소(920)보다 더 작은 범위를 갖는 것을 제외하면 CMUT 요소(920)와 유사하다. 본 발명의 범주를 벗어남이 없이, 1.5D CMUT 어레이(900)는 총 5 개의 행과 같은 더 많은 행의 CMUT 요소를 포함할 수 있다. 1.5D CMUT 어레이(900)는 축(890)에 수직인 치수에서의 빔포밍의 공간 해상도가 축(890)에 평행한 치수에서의 빔포밍의 공간 해상도보다 더 작지만, 축(890)에 수직한 치수에서 초음파의 어느 정도의 빔포밍을 허용한다. 이러한 빔 포밍은 1.5D CMUT 어레이(900)의 방출 면으로부터 떨어진 원하는 거리에서 초점을 달성하기 위해 축(890)에 직교하는 치수에서 1.5D CMUT 어레이(900)에 의해 방출된 초음파를 전자적으로 포커싱하는 역할을 할 수 있다. 1.5D CMUT 어레이(900)는 전자 빔포밍과 함께 초음파의 포커싱을 위한 렌즈(510)와 같은 렌즈로 구현될 수 있거나, 1.5D CMUT 어레이(900)는 렌즈(510) 없이 구현될 수 있고 포커싱을 위한 빔포밍에 의존할 수 있다.
도 10은 1.75D CMUT 어레이(1000)를 예시한다. 도 10은 1.75D CMUT 어레이(1000)의 초음파 방출 면(812)의 평면도를 도시한다. 1.75D CMUT 어레이(1000)는 CMUT 어레이(210) 및 CMUT 어레이(112)의 실시예이다. "1.75D"는 빔포밍 분야의 기술 용어이다. 1.75D 변환기 어레이는 (a) 1 차원에서 높은 공간 해상도 및 직교 2 차원에서 훨씬 더 제한된 공간 해상도를 가지며, (b) 제 1 치수와 평행하고 제 2 치수의 중심에 있는 선에 대해 비대칭적인 방식으로 작동되는 2 차원 변환기 어레이이다. 예를 들어, 1.75D 변환기 어레이는 5 x 128 또는 5 x 256 변환기를 갖춘 어레이를 형성하기 위해 각각의 행에 128 또는 256 변환기를 갖춘 5 개의 행을 가질 수 있다.
1.75D CMUT 어레이(1000)는 CMUT 요소의 추가 행을 포함하는 것을 제외하면 1.5D CMUT 어레이(900)와 유사하다. 1.75D CMUT 어레이(1000)는 5 개의 행의 CMUT 요소: 중앙 행(1030)의 CMUT 요소(1020), 행(1030)의 측면의 2 개의 행(1032)의 CMUT 요소(1032) 및 2 개의 외부 행(1034)의 CMUT 요소(1024)를 포함한다. 각각의 행(1030, 1032 및 1034)은 CMUT 요소(1020/1022/1024)의 5 x N 어레이를 형성하기 위해 N CMUT 요소(1020/1022/1024)(여기서, N은 128 또는 256과 같이 5보다 상당히 큰 정수임)를 가진다. CMUT 요소(1030)는 CMUT 요소(820)와 유사하지만, 축(890)에 수직인 방향으로 더 작은 범위를 가질 수 있다. CMUT 요소(1020)는 축(890)에 수직인 방향으로 CMUT 요소(1020)보다 더 작은 범위를 갖는 것을 제외하면 CMUT 요소(1020)와 유사하며, CMUT 요소(1024)는 축(890)에 수직인 방향으로 CMUT 요소(1022)보다 더 작은 범위를 갖는 것을 제외하면 CMUT 요소(1022)와 유사하다. 본 발명의 범주를 벗어남이 없이, 1.75D CMUT 어레이(1000)는 더 많은 행의 CMUT 요소를 포함할 수 있다. 1.75D CMUT 어레이(1000)는 축(890)에 수직인 치수에서의 빔포밍의 공간 해상도가 축(890)에 평행한 치수에서의 빔포밍의 공간 해상도보다 더 작지만, 축(890)에 수직한 치수에서 초음파의 어느 정도의 빔포밍을 허용한다. 이러한 빔 포밍은 1.75D CMUT 어레이(1000)의 방출 면으로부터 떨어진 원하는 거리뿐만 아니라 축(890)에 직교하는 치수를 따르는 원하는 위치에서 초점을 달성하기 위해 축(890)에 직교하는 치수에서 1.75D CMUT 어레이(1000)에 의해 방출된 초음파를 전자적으로 포커싱하는 역할을 할 수 있다. 1.75D CMUT 어레이(1000)는 전자 빔포밍과 함께 초음파의 포커싱을 위한 렌즈(510)와 같은 렌즈로 구현될 수 있거나, 1.75D CMUT 어레이(1000)는 렌즈(510) 없이 구현될 수 있고 포커싱을 위한 빔포밍에 의존할 수 있다.
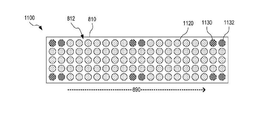
도 11은 2D 어레이로 배열된 복수의 CMUT 요소(1120)를 포함한 2 차원(2D) CMUT 어레이(1100)를 예시한다. CMUT 요소(1120)는 CMUT 요소(820)와 유사하다. 도 11은 2D CMUT 어레이(1100)의 초음파 방출 면(812)의 평면도를 도시한다. CMUT 어레이(1100)는 CMUT 어레이(210) 및 CMUT 어레이(112)의 실시예이다. 예시의 명확성을 위해, 도 11은 5 x 20 CMUT 요소(1120)를 갖는 것으로 2D CMUT 어레이(1100)를 도시하지만, 2D CMUT 어레이(1100)는 10 x 128 CMUT 요소(1120)와 20 x 256 CMUT 요소(1120)와 같은 더 많은 수의 CMUT 요소(1120)를 포함할 수 있다. 특정 실시예에서, 2D CMUT 어레이(1100)는 CMUT 어레이(900 및 1000)에 의해 제공되는 빔포밍의 관련된 공간 해상도보다 더 큰 공간 해상도의, 축(890)에 수직한 치수에서 빔포밍을 가능하게 한다.
2D CMUT 어레이(1100)는 센서(1130) 및/또는 센서(1142)를 포함할 수 있다. 센서(1130)는 센서(830)와 유사하고, 센서(1132)는 센서(842)와 유사하다. 각각의 센서(1130/1132)는 CMUT 요소(1120)에 의해 형성된 어레이에서 하나의 부위를 점유할 수 있어서, 이러한 특정 부위는 CMUT 요소(1120) 대신에 센서(1130/1132)를 가진다. 대안적으로, 센서(1130/1132)는 CMUT 요소(1120)의 2D 어레이를 방해하지 않는 위치에 위치된다. 본 발명의 범주를 벗어남이 없이, CMUT 요소(1120)의 형상은 도 11에 도시된 것과 상이할 수 있다. 예를 들어, 각각의 CMUT 요소(1120)는 정사각형, 직사각형 또는 타원형일 수 있다.
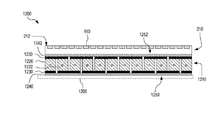
도 12a 및 도 12b는 하나의 CMUT-TEC 장치(1200)를 예시한다. CMUT-TEC 장치(1200)는 CMUT-TEC 장치(200)의 실시예이다. CMUT-TEC 장치(1200)는 열전 냉각기(1210)에 직접 배치되거나 형성된 CMUT 어레이(210)를 갖춘 열전 냉각기(1210)를 포함한다. 열전 냉각기(1210)는 열전 냉각기(220 또는 114)의 실시예이다. 도 12a는 CMUT-TEC 장치(1200)의 단면도이며, 여기서 단면도는 CMUT 어레이(210)의 초음파 방출 면(212)에 수직인 평면에서 취한 것이다. 도 12b는 열전 냉각기(1210)의 반도체의 평면도이고, 여기서 평면도는 초음파 방출 면(212)으로부터 열전 냉각기(1210)의 반도체 쪽 방향으로의 도면이다. 도 12a 및 12b는 다음 설명에서 함께 보는 것이 가장 바람직하다.
열전 냉각기(1210)는 복수의 n-형 반도체(1220) 및 전극(1230)에 의해 직렬로 전기적으로 커플링된 복수의 p-형 반도체(1222)를 포함하여, 직렬 커플링이 도 12a 및 도 12b의 선(1290)으로 표시된 바와 같이 n-형 반도체와 p-형 반도체 사이에서 교대한다. 본 발명의 범주를 벗어남이 없이, 전극(1230)은 도 12a 및 도 12b에 도시된 것과 상이하게 배열될 수 있고, 선(1290)은 상이한 경로를 취할 수 있다. 또한, n-형 반도체(1220) 및 복수의 p-형 반도체(1222)의 수는 도 12b에 도시된 것과 상이할 수 있음을 이해해야 한다. 작동시, CMUT 어레이(210)를 향하는 열전 냉각기(1210)의 저온 측(1252) 및 CMUT 어레이(210)의 반대로 향하는 열전 냉각기(1210)의 고온 측(1250)을 형성하기 위해 일련의 n-형 반도체(1220)와 복수의 p-형 반도체(1222)에 걸쳐 전압 강하가 인가된다. 열전 냉각기(1210)는 고온 측(1250)에 n-형 반도체(1220)와 p-형 반도체(1222)를 열적으로 커플링시키는 열 전도체(1240)를 더 포함한다. 선택적으로, 열전 냉각기(1210)는 또한, 저온 측(1252)에 n-형 반도체(1220)와 p-형 반도체(1222)를 열적으로 커플링시키는 열 전도체(1242)를 포함한다. 대안적으로, CMUT 어레이(210)의 일부분은 열 전도체(1242)를 형성한다. 각각의 열 전도체(1240 및 1242)는 전기 절연체이다. 일 예에서, 각각의 열 전도체(1240 및 1242)는 이산화 실리콘, 질화 실리콘 또는 다른 열 전도성 유전체의 박막으로 형성된다.
CMUT-TEC 장치(1200)는 CMUT-TEC 장치(500)에 구성된 바와 같은 CMUT 어레이(210) 및 열전 냉각기(220)의 실시예를 형성한다. 도 12에 도시되지 않지만, CMUT-TEC 장치(1200)는 CMUT 어레이(210)의 초음파 방출 면(212)에 배치된 렌즈(510)를 더 포함할 수 있다.
특정 실시예에서, CMUT-TEC 장치(1200)는 고온 측(1250)에 열적으로 커플링되고 고온 측(1250)의 반대로 열을 전도하도록 구성된 고체 열 전도체(1260)를 포함한다. 고체 열 전도체(1260)는 고체 열 전도체(710)의 실시예이다.
도 13은 그 사이에 조정 가능한 각도를 갖는 2 개의 평면 CMUT 서브어레이(1310(1) 및 1310(2))를 갖춘 하나의 CMUT-TEC 장치(1300)를 도시한다. CMUT-TEC 장치(1300)는 CMUT-TEC 장치(200)의 실시예이다. CMUT 서브어레이(1310(1) 및 1310(2))는 각각의 열전 냉각기(1320(1) 및 1320(2))에 열적으로 커플링된다. 각각의 열전 냉각기(1320)와 쌍을 이루는 CMUT 서브어레이(1310)의 각각의 사례는 CMUT-TEC 장치(1200)와 유사할 수 있다. CMUT-TEC 장치(1300)는 각각, 열전 냉각기(1320(1) 및 1320(2))의 고온 측에 열적으로 커플링되는 고체 열 전도체(1330(1) 및 1330(2))를 더 포함할 수 있다.
CMUT-TEC 장치(1300)는 (a) CMUT 서브어레이(1310(2)) 및 관련 열전 냉각기(1320(2))(및 선택적으로 고체 열 전도체(1330(2)))를 (b) 화살표(1350)로 나타낸 바와 같이, CMUT 서브어레이(1310(1)) 및 관련 열전 냉각기(1320(1)(및 선택적으로 고체 열 전도체(1330(1)))에 대해 피봇 가능하게 하는 힌지(1340)를 포함한다. 이러한 피봇 행위는 CMUT 서브어레이(1310)에 의해 발생된 초음파(270)를 표적 조직(280)으로 지향시키고/시키거나 신체 채널(392)의 곡률을 따르게 하는 CMUT-TEC 장치(1300)의 능력을 개선하는 역할을 할 수 있다.
CMUT-TEC 장치(1300)는 축(890)을 따르는 방향으로 범위(1380)를 가진다. 범위(1380)는 예를 들어, 10 밀리미터 내지 50 밀리미터 범위 내에 있다.
도 14는 그 사이에 조정 가능한 각도를 갖는 2 개의 평면 CMUT 서브어레이(1410(1) 및 1410(2))를 갖는 하나의 CMUT-TEC 장치(1400)의 사진도(pictorial view)이다. CMUT-TEC 장치(1400)는 CMUT 서브어레이(1410(1))와 동일 평면으로부터 멀어지는 각도(1420)만큼 CMUT 서브어레이(1410(2))의 피봇을 허용하는 CMUT-TEC 장치(1300)의 실시예이다. 각도(1420)는 10 내지 30 도와 같은 최대 30 도의 범위 내에 있다.
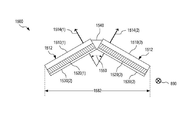
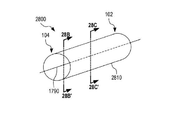
도 15는 서로로부터 각진 2 개의 평면 CMUT 서브어레이(1510(1) 및 1510(2))를 갖는 하나의 CMUT-TEC 장치(1500)를 예시한다. CMUT-TEC 장치(1500)는 CMUT-TEC 장치(200)의 실시예이다. CMUT 서브어레이(1510(1) 및 1310(2))는 각각의 열전 냉각기(1520(1) 및 1520(2))에 열적으로 커플링된다. 각각의 열전 냉각기(1520)와 쌍을 이루는 CMUT 서브어레이(1510)의 각각의 사례는 CMUT-TEC 장치(1200)와 유사할 수 있다. CMUT-TEC 장치(1500)는 각각 열전 냉각기(1520(1) 및 1520(2))의 고온 측에 열적으로 커플링되는 고체 열 전도체(1530(1) 및 1530(2))를 더 포함할 수 있다. 본 발명의 범주를 벗어남이 없이, 열전 냉각기(1520(1) 및 1520(2))는 CMUT 서브어레이(1510(1) 및 1510(2)) 모두에 열적으로 커플링되는 단일 열전 냉각기로서 구현될 수 있다.
CMUT-TEC 장치(1500)는 CMUT 서브어레이(1510)의 초음파 방출 면(1512)이 서로로부터 특정 범위로 마주 보는 방식으로, (a) CMUT 서브어레이(1510(2)) 및 관련 열전 냉각기(1520(2))(및 선택적으로 고체 열 전도체(1530(2))를 (b) CMUT 서브어레이(1510(1)) 및 관련 열전 냉각기(1520(1))(및 선택적으로 고체 열 전도체(1530(1)))에 대해 각지게 위치시키는 기계적 커플러(1540)를 포함한다. 그에 따라서 CMUT-TEC 장치(1500)는 단일 평면 CMUT-TEC 장치에 의해 달성될 수 있는 것보다 더 큰 각도 범위를 가진다. 각각의 초음파 방출 면(1512)은 카테터(110)에서 구현될 때, CMUT-TEC 장치(1500)가 카테터(110)의 종축에 실질적으로 평행한 각각의 초음파 방출 면(1512)에 대해 지향되도록 축(890)과 실질적으로 평행하다. 요도(194)로부터 전립선(192)의 초음파 치료를 위해 의도된 구현예에서, CMUT-TEC 장치(1500)의 2 개의 초음파 방출 면(1512)은 예를 들어, CMUT-TEC 장치(1500)의 회전이 전립선(192)의 초음파 치료 동안 적거나 필요 없도록 전립선(192)의 큰 부분의 동시 초음파 노출을 촉진할 수 있다.
실시예에서, 초음파 방출 면(1512)의 법선 벡터(1514) 사이의 각도는 45 내지 90도, 예컨대 60 내지 65 도의 범위 내에 있다. 각각의 CMUT 서브어레이(1510)는 축(890)에 평행한 치수로 신장될 수 있다.
CMUT-TEC 장치(1500)는 축(890)에 직교하는 치수에서 범위(1582)를 가진다. 범위(1582)는 실시예에서 요도 카테터의 구현예와 호환될 수 있는, 예를 들어 2.5 mm 내지 3.5 mm의 범위 또는 2 mm 내지 5 mm의 범위 내에 있다.
도 16은 서로로부터 멀어지게 각진 2 개의 평면 CMUT 서브어레이(1610(1) 및 1610(2))를 갖춘 하나의 CMUT-TEC 장치(1600)의 사진도이다. CMUT-TEC 장치(1600)는 CMUT-TEC 장치(1500)의 실시예이며, 여기서 각각의 CMUT 서브어레이(1610)는 축(890)에 평행한 치수로 신장된다.
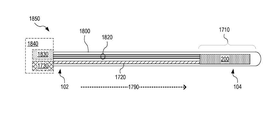
도 17은 CMUT-TEC 변환기 장치를 갖춘 하나의 카테터(1700)를 예시한다. 도 17은 카테터(1700)의 종축(1790)에 평행한 단면을 갖는 카테터(1700)의 단면도이다. 일 실시예에서, 카테터(1700)는 종축(1790)의 방향이 카테터(1700)의 길이를 따라 항상 일정하도록 강성 및 직선이다. 다른 실시예에서, 카테터(1700)는 유연하고 종축(1790)의 방향이 카테터(1700)의 길이를 따라 변할 수 있도록 구부러질 수 있다. 이러한 실시예와 관련하여, 도 17의 단면도는 그의 직선 구성의 카테터(1700)의 도면에 대응한다. 본 발명의 범주로부터 벗어남이 없이, 카테터(1700)는 강성 방식 또는 유연한 방식으로 항상 구부러지도록 구성될 수 있다. 이러한 경우에, 도 17의 단면도는 카테터(1700)의 직선화된 버전에 대응한다.
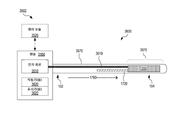
카테터(1700)는 카테터(110)의 실시예이다. 카테터(1700)는 CMUT-TEC 장치(200) 및 고체 열 전도체(1720)를 포함한다. 카테터(1700)는 카테터(1700)의 원위 단부(104)에서 카테터(1700)의 카테터 팁(1710)에 CMUT-TEC 장치(200)를 포함한다. 고체 열 전도체(1720)는 CMUT-TEC 장치(200)의 열전 냉각기(들)(220)에 커플링되고 열전 냉각기(들)(220)로부터 멀어지게 열을 전도하기 위해 원위 단부(104)로부터 근위 단부(102) 쪽으로 카테터(1700)를 따라 연장한다.
일 실시예에서, 고체 열 전도체(1720)는 구리, 은 및/또는 알루미늄과 같은 금속을 포함하거나 금속으로 실질적으로 구성된다. 일 예에서, 고체 열 전도체(1720)는 구리 로드와 같은 금속 로드이다. 다른 예에서, 고체 열 전도체(1720)는 복수의 편조 구리 와이어와 같은 복수의 편조 금속 와이어를 포함한다. 편조 금속 와이어는 예를 들어, 고체 열 전도체(1720)에 이용 가능한 경로가 직선이 아닌 경우에 고체 열 전도체(1720)가 굴곡되게 하도록 구성될 수 있다. 도 7 및 고체 열 전도체(710)를 참조하여 위에서 논의된 바와 같이, 그러한 유연성은 카테터(1700)가 신체 채널(392)에 배치될 때, 특히 카테터(1700)가 장기간 동안 신체 채널(392)에 남아 있거나 카테터(1700)의 재위치 설정/재방위가 요구되는 경우에 환자 편안함을 개선할 수 있다. 다른 실시예에서, 고체 열 전도체(1720)는 비금속 열 전도체, 예를 들어 열 전도성 나노섬유와 같은 열 전도성 나노재료를 포함하거나 이로 실질적으로 구성된다. 또 다른 실시예에서, 고체 열 전도체(1720)는 열 전도성 나노복합물을 포함하거나 이로 실질적으로 구성된다. 추가 실시예에서, 고체 열 전도체(1720)는 메타재료를 포함하거나 이로 실질적으로 구성된다.
도 17에 도시된 실시예에서, 고체 열 전도체(1720)는 CMUT-TEC 장치(200)로부터 카테터(1700)의 외부로 제거된 열의 적어도 일부분을 전도하기 위해 근위 단부(102)의 극단까지 완전히 연장된다. 카테터(1700)의 이러한 실시예는 근위 단부(102)에서 또는 그를 넘어 고체 열 전도체(1720)에 커플링된 열 교환기(1730)와 함께 장치(1750)에서 구현될 수 있다. 열 교환기(1730)는 카테터(1700)가 내부로 삽입되는 신체 채널 외부의 고체 열 전도체(1720)를 냉각시킨다. 열 교환기(1730)는 액체 냉각 또는 가스 냉각을 사용할 수 있다. 일 예에서, 열 교환기(1730)는 고체 열 전도체(1720)의 냉각을 위한 냉각 핀을 포함한다. 다른 예에서, 열 교환기(1730)는 적어도 CMUT-TEC 장치(200)의 작동 중에 고체 열 전도체(1720)를 냉각시키기 위해 고체 열 전도체(1720)에 의해 액체 또는 가스를 순환시킨다. 장치(1750)는 핸들(1740)에서 열 교환기(1730)를 구현할 수 있다. 핸들(1740)은 핸들(120)의 실시예이다.
도 17에 도시되지 않은 대안적인 실시예에서, 고체 열 전도체(1720)는 근위 단부(102)까지만 연장한다. 이러한 실시예에서, 고체 열 전도체(1720)는 카테터의 길이의 일부분을 따라서, CMUT-TEC 장치(200)로부터 제거된 열을 재분배할 수 있지만, 카테터의 장점을 취하여 비-표적 조직과 접촉하는 카테터 벽의 온도가 설정된 임계값을 초과하지 않도록 보장한다. 하나의 그러한 예에서, 고체 열 전도체(1720)는 (종축(1790)과 관련된)종 방향으로 카테터(1700)의 적어도 일부를 따라 열을 균일하게 재분배한다. 카테터(1700)의 이러한 실시예는 또한, 핸들(1740)에 커플링되어 열 교환기(1730)가 아닌 핸들(1740)을 포함하는 장치(1750)의 대안적인 실시예를 형성할 수 있다.
카테터(1700)는 종축(1790)을 따르는 범위(1780) 및 종축(1790)에 직교하는 치수로 범위(1782)를 가진다. 축(1790)에 직교하는 카테터(1700)의 단면은 범위(1782)가 직경이 되도록 원형일 수 있다. 일 실시예에서, 범위(1780)는 원위 단부(104)가 표적 조직(380)에서 또는 그 근처에서 신체 채널(392)에 위치되지만 근위 단부(102)가 신체 채널(392)의 출구에 또는 외부 신체 채널(392)에 있을 정도로 충분히 길다. 특정 실시예에서, 범위(1782)는 2 내지 10 밀리미터의 범위 내에 있다. 그러한 일 실시예에서, 카테터(1700)는 요도 카테터로서 구성되며, 범위(1782)는 약 5 밀리미터와 같이 3 내지 7 밀리미터 범위 내에 있을 수 있다.
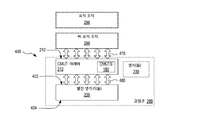
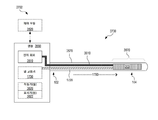
도 18은 도 17에서 사용된 것과 유사한 단면도로 CMUT-TEC 장치를 갖춘 다른 카테터(1800)를 예시한다. 카테터(1800)는 CMUT-TEC 장치(200)로부터 근위 단부(102)로의 전기 연결부(1820)를 더 포함하는 카테터(1700)의 실시예이다. 전기 연결부(1820)는 CMUT-TEC 장치(200)를 외부 전자 회로(1830)에 연결하도록 구성된다. 전자 회로(1830)는 (a) 일부 전기 연결부(1820)를 통해 CMUT-TEC 장치(200)의 CMUT 어레이(210)로 전송되는 구동 신호를 발생하는 초음파 구동 회로 및 (b) CMUT-TEC 장치(200)의 열전 냉각기(들)(220)에 전기 연결부(1820)의 다른 전기 연결부를 통해 전력을 공급하는 펠티에 구동 회로를 포함한다. 전자 회로(1830)는 일부 전기 연결부(1820)를 통해 CMUT 어레이(210)로부터 수신된 초음파 이미징 신호를 수신하고 처리하는 회로를 더 포함할 수 있다.
카테터(1800) 및 전자 회로(1830)는 장치(1850)에서 함께 구현될 수 있다. 일 실시예에서, 장치(1850)는 전자 회로(1830)를 포함하는 핸들(1840)을 포함한다. 핸들(1840)은 열 교환기(1730)를 더 포함할 수 있다.
본 발명의 범주를 벗어남이 없이, 적어도 일부의 전기 연결부(1820)는 (a) 전자 회로(1830)를 CMUT-TEC 장치(200)에 커플링하고 (b) CMUT-TEC 장치(200)의 열전 냉각기(들)(220)로부터 멀리 열을 전도시키는 역할을 모두 수행할 수 있다. 이러한 경우에, 전기 연결부(1820)는 고체 열 전도체(1720)를 대체하거나, 고체 열 전도체(1720)의 열 전도 용량에 대한 요건을 감소시킬 수 있다. 그러한 일 예에서, 일부 전기 연결부(1820)는 동축 케이블이고 동축 케이블의 외부 전도체는 열전 냉각기(들)(220)로부터의 열을 제거하기 위해 열전 냉각기(들)(220)의 고온 측에 열적으로 커플링된다. 또한, 본 발명의 범주를 벗어남이 없이, 전자 회로(1830)는 장치(1850)의 외부에 구현되거나 예를 들어, 장치(1850)의 외부에서 제어 모듈(140)과 통합될 수 있다.
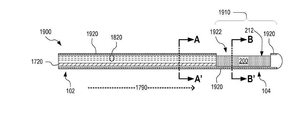
도 19 내지 도 21은 CMUT-TEC 장치를 갖춘 또 다른 카테터(1900)를 예시한다. 도 19는 도 17에서 사용된 것과 유사한 단면도로 카테터(1900)를 도시한다. 도 20은 도 19의 선(A-A')으로 나타낸 단면도로 카테터(1900)를 도시한다. 도 21은 도 19의 선(B-B')으로 나타낸 단면도로 카테터(1900)의 카테터 팁(1910)을 도시한다. 도 19 내지 도 21은 다음 설명에서 함께 보는 것이 가장 바람직하다.
카테터(1900)는 카테터(1700)의 실시예이다. 카테터(1900)는 전기 연결부(1820)를 더 포함할 수 있으며, 그 경우에 카테터(1900)는 카테터(1800)의 실시예이다. 카테터(1900)는 카테터(1900)의 벽을 한정하는 관형 카테터 재킷(1920)을 더 포함한다. 관형 카테터 재킷(1920)은 CMUT-TEC 장치(200)의 초음파 방출 면(212) 위에 위치된 윈도우(1922)를 가진다. 윈도우(1922)는 렌즈(510) 또는 초음파를 전송할 수 있는 다른 재료를 수용할 수 있다. 관형 카테터 재킷(1920)은 외경(2010) 및 내경(2012)을 가진다. 요도 카테터로서 사용하도록 구성된 실시예에서, 외경(2010)은 약 5 밀리미터와 같은 3 내지 7 밀리미터의 범위 내에 있고, 내경(2012)은 약 4 밀리미터와 같은 2.5 내지 6.5 밀리미터의 범위 내에 있다. 관형 카테터 재킷은 경성 또는 연성일 수 있다. 일 실시예에서, 관형 카테터 재킷은 스테인레스 스틸과 같은 금속을 포함하거나 실질적으로 금속으로 구성된다. 관형 카테터 재킷(1920)의 이러한 실시예는 강성이다. 다른 실시예에서, 관형 카테터 재킷(1920)은 폴리머를 포함하거나 실질적으로 폴리머로 구성된다. 관형 카테터 재킷(1920)의 이러한 실시예는 강성 또는 연성일 수 있다. 관형 카테터 재킷(1920)은 고체 열 전도체(1720) 및 포함된 때, 전기 연결부(1820)를 포함한다(도 20 참조). 고체 열 전도체(1720) 및 선택적인 전기 연결부(1820)의 위치 설정은 본 발명의 범주를 벗어남이 없이, 도 20에 도시된 것과 상이할 수 있다. 예를 들어, 고체 열 전도체(1720)는 관형 카테터 재킷(1920)에 의해 한정된 벽에 더 가깝게 위치될 수 있다.
특정 실시예에서, 관형 카테터 재킷(1920)은 관형 카테터 재킷(1920)의 벽을 통한 고체 열 전도체(1720)(및/또는 전기 연결부(1820))에 의해 수행되는 열의 전달을 방지하거나 감소시키기 위해 단열된다. 카테터(1900)가 신체 채널(392)(도 3 또는 도 6 참조)에 위치될 때, 관형 카테터 재킷(1920)의 그러한 단열은 열 방출 카테터(1900)로 인한 벽(390)에 대한 열-유도 손상을 방지하는 것을 돕는다. 하나의 시나리오에서, 관형 카테터 재킷(1920)의 단열은 고체 열 전도체(1720)가 벽(390)을 연소하는 것을 방지한다. 하나의 단열 실시예에서, 관형 카테터 재킷(1920)은 중합체 또는 고무와 같은 열악한 열 전도체인 고체 재료를 포함하거나 실질적으로 고체 재료로 구성된다. 다른 단열 실시예에서, 관형 카테터 재킷(1920)은 기공을 갖는 다공성 재료를 포함하거나 이로 실질적으로 구성되어 다공성 재료의 낮은 열 전도율을 초래한다. 또 다른 단열 실시예에서, 관형 카테터 재킷(1920)은 진공 층을 포함한다.
대안적인 실시예에서, 전기 연결부(1820)의 절연 외피는 관형 카테터 재킷(1920)으로부터 고체 열 전도체(1720)를 적어도 부분적으로 열적으로 절연시켜서 관형 카테터 재킷(1920)이 열 전도성이거나 적어도 덜 효과적인 열 절연체일 수 있다. 그러한 실시예에서, 고체 열 전도체(1720)는 유리하게 전기 연결부(1820)에 의해 둘러싸일 수 있다.
CMUT 어레이(210)(및 선택적인 렌즈(510))의 측면 근처의 영역(2190)에 예리한 에지 및 갭을 갖는 것으로 도 21에 도시되지만, 카테터 팁(1910)은 본 발명의 범주를 벗어남이 없이, 환자의 편안함을 개선하고 카테터(1900)가 내부로 삽입되는 신체 채널의 손상을 방지하기 위해 매끄러운 외부 표면으로 구성될 수 있다. 일 예에서, 영역(2190)에서 그리고 선택적으로 또한 렌즈(510)에서 카테터 팁(1910)의 윤곽은 관형 카테터 재킷(1920)의 윤곽의 연속이다.
도 22는 제거 가능한 방식으로 카테터(1900)를 감싸도록 구성된 하나의 카테터 슬리브(2200)를 예시한다. 도 22는 도 19에 사용된 것과 유사한 단면도로 카테터 슬리브(2200) 및 카테터(1900)를 도시한다. 하나의 사용 시나리오에서, 카테터 슬리브(2200)는 표적 조직(380)을 초음파로 치료하기 위해 카테터(1900)를 신체 채널(392)에 삽입하기 전에 카테터(1900) 위에 놓인다. 초음파 치료 후, 카테터(1900)는 방향(2290)을 따라 카테터 슬리브(2200) 및 신체 채널(392)로부터 추출되는 반면에, 카테터 슬리브(2200)는 신체 채널(392)에 머무른다. 이러한 사용 시나리오에 대한 변형예에서, 카테터 슬리브(2200)는 먼저 카테터(1900) 없이 신체 채널(392) 내에 삽입되고, 그후 카테터(1900)는 카테터 슬리브(2200)에 삽입되어 카테터(1900)를 신체 채널(392)에 위치시킨다. 카테터 슬리브(2200)는 벽(390)(예를 들어, 전립선(192) 근처의 요도(194)의 벽)의 온도 및/또는 압력을 모니터링하기 위해 카테터(1900)에 의해 표적 조직(380)(예를 들어, 전립선(192))의 초음파 치료 후 한동안 신체 채널(392)(예를 들어, 요도(194))에 보유될 수 있다. 또한, 카테터 슬리브(2200)는 예를 들어, 치료 유도된 부기가 가라앉을 때까지 초음파 치료 후에 신체 채널(392)을 개방 상태로 유지하는 역할을 할 수 있다. 카테터 슬리브(2200)가 전립선(192)의 초음파 치료를 돕기 위해 요도(194)에 사용되도록 구성되는 실시예에서, 카테터 슬리브(2200)는 초음파 치료 후에 요도(194)에 남아서 요도의 완전한 막힘을 방지할 수 있으며(그렇지 않으면 치료 유도된 부기를 잠재적으로 초래함), 카테터 슬리브(2200)를 통해 방광(196)으로부터 소변을 통과시킨다.
카테터 슬리브(2200)는 윈도우(2222)를 가진다. 카테터(1900)가 카테터 슬리브(2200)에 완전히 삽입될 때, 윈도우(2222)는 CMUT-TEC 장치(200)의 초음파 방출 면(212) 위에 위치된다. 윈도우(2222)는 실제 개구일 수 있거나, 윈도우(2222)는 초음파를 전송할 수 있는 재료로 덮일 수 있다. 대안적인 실시예에서, 카테터 슬리브(2200)는 윈도우(2222)를 갖지 않는다. 이러한 대안적인 실시예에서, 모든 카테터 슬리브(2200) 또는 카테터 슬리브(2200)의 일부분은 플라스틱과 같은 초음파 전송 재료로 만들어진다. 일 구현예에서, 초음파 전송 재료는 치료 동안 CMUT-TEC 장치(200)에 의해 점유된 영역을 둘러싸서, 360도에서 초음파 노출을 가능하게 한다. 카테터 슬리브(2200)의 이러한 구현예는 요도(194)에 대해 카테터 슬리브(2200)를 회전시킬 필요 없이 요도(194)로부터 모든 전립선(192)에 대한 접근을 제공할 수 있다.
카테터 슬리브(2200)는 강성 또는 연성, 또는 이의 조합일 수 있다. 예를 들어, 카테터 팁(1910)을 수용하도록 구성된 카테터 슬리브(2200)의 원위 부분은 강성일 수 있는 반면에, 더 근위 부분은 연성일 수 있다. 카테터 슬리브(2200)의 완전히 또는 부분적으로 연성인 실시예는 카테터(1900)의 강성 또는 연성 실시예와 호환될 수 있다.
카테터 슬리브(2200)는 단열 층을 포함하거나 실질적으로 단열 재료로 구성될 수 있어서, 카테터 슬리브(2200)는 고체 열 전도체(1720)에 의해 전도된 열로부터 벽(390)을 보호할 수 있다.
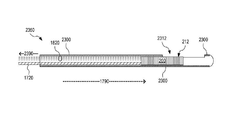
도 23은 CMUT-TEC 장치(200) 및 그로부터 관련된 전기와 열 연결부의 제거를 허용하는 관형 카테터 재킷(2300)을 사용하는 CMUT-TEC 장치(200)를 갖춘 하나의 카테터(2350)를 예시한다. 카테터(2350)는 관형 카테터 재킷(1920)을 제거 가능한 관형 카테터 재킷(2300)으로서 구현하여, CMUT-TEC 장치(200), 고체 열 전도체(1720) 및 선택적인 전기 연결부(1820)를 방향(2390)을 따라서 관형 카테터 재킷(2300)으로부터의 추출을 허용하는 카테터(1900)의 실시예이다. 제거 가능한 관형 카테터 재킷(2300)의 기능은 도 22를 참조하여 위에서 논의된 카테터 슬리브(2200)의 기능과 유사할 수 있다.
관형 카테터 재킷(2300)은 윈도우(2312)을 가진다. CMUT-TEC 장치(200)가 관형 카테터 재킷(2300)에 완전히 삽입될 때, 윈도우(2312)는 CMUT-TEC 장치(200)의 초음파 방출 면(212) 위에 위치된다. 윈도우(2312)는 실제 개구일 수 있거나, 윈도우(2312)는 초음파를 전송할 수있는 재료일 수 있다.
함께, 관형 카테터 재킷(2300), CMUT-TEC 장치(200), 고체 열 전도체(1720), 및 선택적으로 전기 연결부(1820)는 카테터(2350)를 형성한다.
도 24는 고체 상태 냉각기능을 갖춘 하나의 카테터 또는 카테터 슬리브(2400)를 예시한다. 카테터/카테터 슬리브(2400)는 관형 벽(2410) 및 관형 벽(2410)에 커플링된 적어도 하나의 열전 냉각기(2420)를 포함한다. 관형 벽(2410)은 신체 채널(392) 내에 삽입되도록 구성되고, 열전 냉각기(들)(2420)는 신체 채널(392)의 벽(390)의 적어도 일부분을 냉각시키도록 구성된다. 열전 냉각기(들)(2420)는 열전 냉각기(들)(2420)와 벽(390) 사이의 직접적인 물리적 접촉을 통해 벽(390)을 냉각시킬 수 있거나, 열전 냉각기(들)(2420)는 관형 벽(2410)을 통한 열 커플링을 통해 벽(390)을 냉각할 수 있다. 관형 벽(2410)은 예를 들어, 관형 카테터 재킷 또는 카테터 슬리브의 관형 벽이다. 후자의 경우에, 카테터 슬리브는 카테터 슬리브(2200)에 대해 논의된 것과 유사한 제거 가능한 방식으로 열전 냉각기(2420)와 같은 카테터/카테터 슬리브(2400)의 다른 부분을 감쌀 수 있다. 열전 냉각기(들)(2420)에 더하여, 카테터/카테터 슬리브(2400)는 벽(390)의 냉각 이외의 하나 이상의 다른 목적을 수행하는 다른 기능을 포함할 수 있다.
관형 벽(2410)은 강성 또는 연성일 수 있다. 일 실시예에서, 관형 벽(2410)은 스테인리스 스틸과 같은 금속을 포함하거나 이로 실질적으로 구성된다. 관형 벽(2410)의 이러한 실시예는 강성이다. 다른 실시예에서, 관형 벽(2410)은 중합체를 포함하거나 이로 실질적으로 구성된다. 관형 벽(2410)의 이러한 실시예는 강성 또는 연성, 또는 이의 조합일 수 있다.
도 25는 관형 벽(2510)에 커플링된 적어도 하나의 열전 냉각기(2520)를 갖는 하나의 카테터 또는 카테터 슬리브(2500)를 예시한다. 카테터/카테터 슬리브(2500)는 카테터/카테터 슬리브(2400)의 실시예이며, 여기서 열전 커플링은 신체 채널(392)의 벽(390)에 열적으로 커플링되도록 관형 벽(2410) 내에 또는 그 위에서 구현된다. 카테터/카테터 슬리브(2500)는 또한, 관형 카테터 재킷(1920)의 실시예를 형성할 수 있다. 도 25의 실시예에서, 각각의 열전 냉각기(2520)는 관형 벽(2510)의 외부에 있다. 이러한 실시예에서, 각각의 열전 냉각기(2520)는 벽(390)을 냉각하기 위해 벽(390)과 직접 물리적으로 접촉할 수 있다. 다른 실시예에서, 각각의 열전 냉각기(2520)는 관형 벽(2510)의 내부에 있거나 관형 벽(2510)의 재료 내에 형성되어서, 각각의 열전 냉각기(2520)는 관형 벽(2510)의 관련 부분이 벽(390)에 열적으로 결합될 때 벽(390)에 열적으로 커플링된다. 하나의 사용 시나리오에서, 열전 냉각기(들)(2520)는 벽(390)의 이러한 부분을 통한 표적 조직(280)의 초음파 치료 전 또는 후에 벽(390)의 일부분을 냉각시킨다. 이러한 시나리오에서, 카테터/카테터 슬리브(2500)는 CMUT 어레이(112)가 벽(390)의 이러한 부분을 통해 표적 조직(280)을 초음파에 노출시키기 위해 위치되기 전 및/또는 후에 열전 냉각기(들)(2520)가 벽(390)의 일부와 접촉하도록 냉각기능과 초음파 치료 사이에서 신체 채널(392)에서 회전될 수 있다.
특정 실시예에서, 카테터/카테터 슬리브(2500)는 관형 벽(2510) 내부에 CMUT 어레이(112) 및 관련 전기 연결부(1820)를 수용하도록 구성되며, 따라서 비-표적 조직(290)의 고체 상태 냉각으로 표적 조직(280)의 초음파 치료를 위한 카테터(2550)를 형성한다. 카테터(2550)의 그러한 실시예에서, 관형 벽(2510)은 CMUT 어레이(112)로부터 표적 조직(280)으로 초음파 방출을 허용하는 윈도우(2512)를 형성하거나 포함할 수 있다. 윈도우(2512)는 윈도우(2312)와 유사할 수 있다. 카테터(2550)는 (a) 카테터 벽에 커플링된 열전 냉각기(들)(114)의 실시예 및 (b) 카테터 벽에 의해 수용된 공간 내의 CMUT 어레이(112)를 가지는 CMUT-TEC 장치(200)의 실시예를 구현하는 카테터(110)의 실시예이다. 함께, CMUT 어레이(112)와 열전 냉각기(들)(114)는 CMUT-TEC 장치(200)의 실시예를 형성한다.
카테터(2550)의 일 실시예에서, 관형 벽(2510)은 방향(2590)을 따라 관형 벽(2510)으로부터 CMUT 어레이(112) 및 관련 전기 연결부(1820)의 추출을 허용한다. 관형 벽(2510)의 이러한 실시예는 열전 냉각기(들)(2520)와 협력하여 열전 냉각기(들)(2520)를 더 포함하는 관형 카테터 재킷(2300)의 실시예를 형성한다. 카테터(2550)의 관련 실시예는 카테터(2550)의 열전 냉각기(들)(2520)가 관형 벽(2510)에 커플링되는 것을 제외하면 카테터(2350)와 유사하다.
도 26은 적어도 하나의 열전 냉각기(2520) 및 관형 벽(2610)에 기계적으로 커플링된 고체 열 전도체(2620)를 갖는 다른 카테터 또는 카테터 슬리브(2600)를 예시한다. 카테터/카테터 슬리브(2600)는 카테터/카테터 슬리브(2500)의 실시예이고, 관형 벽(2610)은 관형 벽(2510)의 실시예이고, 고체 열 전도체(2620)는 고체 열 전도체(1720)의 실시예이다. 고체 열 전도체(2620)는 열전 냉각기(들)(2520)의 작동 중에 열전 냉각기(들)(2520)의 고온 측으로부터 멀리 열을 전도하기 위해 열전 냉각기(들)(2520)에 열적으로 커플링된다.
고체 열 전도체(2620)와 벽(390) 사이의 직접적인 물리적 접촉을 피하기 위해서, 고체 열 전도체(2620)는 관형 벽(2610)의 내부에, 적어도 열전 냉각기(들)(2520)로부터 멀어지는 관형 벽(2610)의 부분(2680) 위에 위치된다. 관형 벽(2610)은 관형 벽(2610)을 통해 고체 열 전도체(2620)로부터의 열 전달을 추가로 방지하고, 따라서 관형 벽(2610)과 접촉하는 벽(390)의 일부분을 열 유도 손상으로부터 보호하도록 단열성일 수 있다. 관형 벽(2610)의 단열 실시예는 관형 카테터 재킷(1920)에 대해 도 19를 참조하여 위에서 논의된 것과 유사한 재료로 구성될 수 있다. 대안적으로, 관형 벽(2610)이 열 전도체이면, 고체 열 전도체(2620)는 관형 벽(2610)으로부터 열적으로 절연될 수 있다.
관형 벽(2610)의 근위 단부(2602)까지 완전히 연장하는 것으로 도 26에 도시되지만, 고체 열 전도체(2620)는 도 17 및 고체 열 전도체(1720)를 참조하여 위에서 논의된 바와 같이 열전 냉각기(들)(2520)로부터 근위 단부(2602) 쪽으로 일부만 연장할 수 있다.
특정 실시예에서, 카테터/카테터 슬리브(2600)는 도 25 및 카테터/카테터 슬리브(2500)를 참조하여 위에서 논의된 것과 유사한 방식으로 CMUT 어레이(112) 및 관련 전기 연결부(1820)를 관형 벽(2610) 내부에 수용하고, 따라서 비-표적 조직(290)의 고체 상태 냉각기능으로 표적 조직(280)의 초음파 치료를 위한 카테터(2650)를 형성하도록 구성된다. 카테터(2650)의 그러한 실시예에서, 관형 벽(2610)은 CMUT 어레이(112)로부터 표적 조직(280)으로 초음파 방출을 허용하는 윈도우(2512)를 포함할 수 있다. 카테터(2650)는 카테터(1800 또는 1900)의 실시예이다.
카테터(2650)의 일 실시예에서, 관형 벽(2610)은 방향(2690)을 따라 관형 벽(2610)으로부터 CMUT 어레이(112) 및 관련 전기 연결부(1820)의 추출을 허용한다. 관형 벽(2610)의 이러한 실시예는 열전 냉각기(2520) 및 고체 열 전도체(2620)와 협력하여 열전 냉각기(들)(2520) 및 고체 열 전도체(2620)를 더 포함하는 관형 카테터 재킷(2300)의 실시예를 형성한다. 카테터(2650)의 관련 실시예는 카테터(2650)의 열전 냉각기(들)(2520) 및 고체 열 전도체(2620)가 관형 벽(2610)에 커플링되는 것을 제외하면 카테터(2350)와 유사하다.
도 27a 및 도 27b는 열전 냉각기능을 갖춘 하나의 카테터 또는 카테터 슬리브(2700)를 예시한다. 카테터/카테터 슬리브(2700)는 카테터/카테터 슬리브(2500)의 실시예이다. 도 27a 및 도 27b는 카테터/카테터 슬리브(2700)의 직교 단면도이며 다음 설명에서 함께 보는 것이 가장 바람직하다. 카테터/카테터 슬리브(2700)는 관형 벽(2710) 및 관형 벽(2710)의 외부에 하나 이상의 열전 냉각기(2720)를 포함한다. 열전 냉각기(들)(2720)는 관형 벽(2710)의 원주 둘레에 걸쳐 있거나 관형 벽(2710)의 원주를 따라 하나 이상의 섹션만을 덮을 수 있다. 열전 냉각기(2720)는 열전 냉각기(2520)의 실시예이며 카테터/카테터 슬리브(2500) 및 카테터/카테터 슬리브(2600) 중 하나에서 구현될 수 있다.
각각의 열전 냉각기(2720)는 (a) 관형 벽(2710)에 배치된 열 전도체(2730), (b) 관형 벽(2710)으로부터 이격된 열 전도체(2732), 및 (c) 금속 전극들(2750 및 2752)에 의해 직렬로 전기적으로 연결되어 n-형 반도체(2740)와 p-형 반도체(2742) 사이에서 교대하는 복수의 n-형 반도체(2740) 및 복수의 p-형 반도체(2742)를 포함한다. 열 전도체(2730 및 2732)는 전기 절연체이다. 작동시, 일련의 n-형 반도체(2740) 및 p-형 반도체(2722)에 걸쳐 전압 강하가 인가되어 신체 채널(392)의 벽(390)을 냉각할 수 있는 열 전도체(2732)에서 저온 측을 형성한다.
일 실시예에서, 열전 냉각기(들)(2720)를 지지하는 관형 벽(2710)의 적어도 일부는 강성이며, n-형 반도체(2740) 및 p-형 반도체(2722)는 관형 벽(2710)의 곡률과 일치하는 구성으로 견고하게 커플링된다. 다른 실시예에서, 열전 냉각기(들)(2720)를 지지하는 관형 벽(2710)의 적어도 일부분은 연성이고, 금속 전극(2750 및 2752) 및 열 전도체(2730 및 2732)는 유연하여 열전 냉각기(들)(2720)가 관형 벽(2710)의 관련 부분의 굽힘에 순응할 수 있다.
도 27b에 도시되지 않지만, 카테터/카테터 슬리브(2700)의 외부 표면은 매끄러울 수 있다. 또한, 본 발명의 범주를 벗어남이 없이, 열전 냉각기(2720)는 관형 벽(2710)의 일부분을 대체할 수 있다. 또한, 열전 냉각기(2720)는 본 발명의 범주를 벗어남이 없이, 관형 벽(2710)의 내부에 구현될 수 있고 관형 벽(2710)에 열적으로 커플링될 수 있다. 이러한 구현예에서, 관형 벽(2710)이 열적으로 커플링되는 관형 벽(2710)의 적어도 일부는 열전 냉각기(2720)가 관형 벽(2710)을 통해 신체 채널(392)의 벽(390)을 냉각시키도록 열 전도된다. 그러한 하나의 구현예가 도 28a 내지 도 28d를 참조하여 아래에서 논의된다.
도 28a 내지 도 28d는 열전 냉각기능을 갖춘 다른 카테터 또는 카테터 슬리브(2800)를 예시한다. 카테터/카테터 슬리브(2800)는 카테터/카테터 슬리브(2500)의 실시예이다. 도 28a는 카테터/카테터 슬리브(2800)의 사시도이다. 도 28b는 종축(1790)에 직교하는 평면에서 카테터/카테터 슬리브(2800)의 원위 단부(104) 근처에서 취한 카테터/카테터 슬리브(2800)의 단면도이다(도 28a의 화살표 28B-28B' 참조). 도 28c는 종축(1790)에 직교하는 평면에서 카테터/카테터 슬리브(2800)의 근위 단부(102)를 향해 추가로 취해진 카테터/카테터 슬리브(2800)의 단면도이다(도 28a의 화살표 28C-28C' 참조). 도 28a 내지 도 28c는 다음 설명에서 함께 보는 것이 가장 바람직하다.
카테터/카테터 슬리브(2800)는 (a) 관형 벽(2810), (b) 관형 벽(2810)의 열 전도성 패드(2812)에 열적으로 그리고 기계적으로 커플링되는 하나 이상의 열전 냉각기(2820), 및 (c) 열전 냉각기(들)(2820)에 열적으로 커플링된 고체 열 전도체(2830)를 포함한다. 작동시, 각각의 열전 냉각기의 저온 측은 관형 벽(2810)과 열적으로 연결되고, 각각의 열전 냉각기의 고온 측은 고체 열 전도체(2830)와 열적으로 연결된다. 열전 냉각기(2820)는 열전 냉각기(2520)의 실시예이며 카테터/카테터 슬리브(2500) 및 카테터/카테터 슬리브(2600) 중 하나에서 구현될 수 있다. 각각의 열전 냉각기(2820)는 열전 냉각기(2720)와 유사한 구조일 수 있다. 관형 벽(2810)은 카테터/카테터 슬리브(2500)의 관형 벽(2510) 및 카테터/카테터 슬리브(2600)의 관형 벽(2610)의 실시예이다. 관형 벽(2810)에서, 열 전도성 패드(2812)는 관형 벽(2810)의 열 전도성 부분(2816)으로부터 열 전도성 패드(2812)를 열적으로 절연시키는 단열체(2814)에 의해 둘러싸인다. 열 전도성 부분(2816)은 예를 들어, 열 전도성 패드(2812) 및 열 절연체(2814)를 제외한 모두 관형 벽(2810)이다. 일 구현에서, 열 전도성 부분(2816)은 스테인리스 스틸과 같은 금속이다. 열 전도성 패드(2812)는 또한 금속일 수 있다.
관형 벽(2810)의 다른 부분으로부터 열 전도성 패드(2812)의 단열은 열전 냉각기(들)(2820)에 의해 냉각되는 관형 벽(2810)의 구역(및 이에 따라 관형 벽(2810)과 접촉하는 인접 조직)을 제한한다. 이러한 구역 제한은 열전 냉각기(들)(2820)가 상당히 큰 관형 벽(2810) 부분 또는 모든 관형 벽(2810)과 열적으로 연결되면(이는 열전 냉각기(들)(2820)의 과부하를 초래할 수 있음) 달성 가능한 냉각기능과 비교하여 열전 냉각기(들)(2820)에 의한 더욱 효과적인 냉각을 용이하게 할 수 있다.
고체 열 전도체(2830)는 관형 벽(2810) 내부에 배치되고 열전 냉각기(들)(2820)로부터 근위 단부(102) 쪽으로 연장한다. 고체 열 전도체(2830)는 근위 단부(102)까지 완전히 연장되거나 근위 단부(102)까지 일부만 연장할 수 있다. 고체 열 전도체(2830)는 고체 열 전도체(1720)의 실시예이다. 실시예에서, 카테터/카테터 슬리브(2800)는 온도를 허용 가능한 수준으로 유지하면서 열을 수용하기 위한 관형 벽(2810)의 열 질량의 장점을 취하면서, 고체 열 전도체(2830)에 의해 전도된 열을 관형 벽(2810)으로 재분배하도록 구성된다. 이러한 실시예에서, 고체 열 전도체(2830)는 예를 들어, 하나 이상의 열 커넥터(2840)를 통해 관형 벽(2810)의 연장 부분 위로 열 전도성 부분(2816)과 열적으로 연결되어, 열 전도성 패드(2812)로부터의 열이 관형 벽(2810)의 상당히 큰 부분으로 재분배된다. 관형 벽(2810)의 이러한 더 큰 부분의 온도가 이러한 공정 동안 증가하고 인접한 조직을 잠재적으로 가열할 수 있지만, 열이 재분배되는 관형 벽(2810)의 큰 부분의 구역(영역)은 온도 증가가 수용 가능한 범위 내에 있도록 충분히 클 수 있다. 다른 실시예에서, 고체 열 전도체(2830)는 비-열 전도성 브리지에 의해 기계적으로 지지되어 고체 열 전도체(2830)가 관형 벽(2810)에 대한 열 단락의 형성을 방지한다.
고체 열 전도체(2810)에 의해 점유되는 카테터/카테터 슬리브(2800)의 길이를 따른 임의의 단면에서, 열 커넥터(2840)의 수는 본 발명의 범주를 벗어남이 없이, 도 28c에 도시된 4 개의 열 커넥터(2840)보다 더 작거나 클 수 있다. 또한, 하나 이상의 열 커넥터(2840)는 슬래브 형상이고 종축(1790)의 연장된 세그먼트를 따라 고체 열 전도체(2830)와 관형 벽(2810) 사이에서 가교 연결될 수 있다. 대안적으로, 각각 관형 벽(2810)의 각각의 국소 부분에 연결되는 몇몇 로드 형상의 열 커넥터(2840)는 열을 관형 벽(2810)의 큰 부분으로 재분배하도록 협력할 수 있다. 일 구현예에서, 열 커넥터(들)(2840)는 관형 벽(2810)의 세그먼트에 걸쳐서 열을 균일하게 또는 적어도 대략 균일하게 재분배하도록 배열된다. 열 커넥터(들)(2840)의 형상 및 두께는 이러한 균일하거나 대략 균일한 열 재분배를 달성하기 위해서 종축(1790)을 따른 위치의 함수일 수 있다.
본 발명의 범주를 벗어남이 없이, 열 전도성 패드(2812)는 열전 냉각기(들)(2820)의 저온 측 열 전도체로서 기능을 할 수 있다.
도 28d는 카테터/카테터 슬리브(2800)의 대안적인 실시예(2800')를 예시한다. 도 28은 카테터/카테터 슬리브(2800')의 단면도이며, 여기서 단면은 도 28c와 동일한 방식으로 취해진다. 카테터/카테터 슬리브(2800')는 (a) 관형 벽(2810)의 열 전도성 부분(2816)이 단열 부분(2816')으로 대체되고 (b) 고체 열 전도체(2830) 및 선택적 열 커넥터(2840)가 고체 열 전도체(2830')로 대체된다는 점을 제외하면 카테터/카테터 슬리브(2800)와 유사하다. 고체 열 전도체(2830')는 관형 벽(2810) 내부에, 예를 들어 단열 부분(2816')의 내부 표면에 인접하거나 심지어 직접적으로 배치된 중공 원통형 전도체이다. 일 구현예에서, 고체 열 전도체(2830')는 근위 단부(102)까지 완전히 연장하고 관형 벽(2810)으로부터 열의 적어도 일부분, 예를 들어 열교환기로 전도하도록 구성된다. 다른 구현예에서, 고체 열 전도체(2830')의 열 질량은 열전 냉각기(들)(2820)에 의해 효과적인 냉각을 허용하면서 열전 냉각기(들)(2820)에 의해 포획된 열을 수용하는데 충분하다. 고체 열 전도체(2830')의 두께는 열전 냉각기(들)(2820)로부터 최적의 열 재분배 및 열 제거를 달성하기 위해서 종축(1790)을 따르는 위치의 함수일 수 있다.
일 실시예에서, 단열 부분(2816')은 유연하고(예를 들어, 유연한 중합체)이고 고체 열 전도체(2830')는 편조 와이어 커넥터이며, 따라서 카테터/카테터 슬리브(2810)는 그의 길이의 적어도 일부를 따라서 유연하다. 이러한 유연성은 환자의 편안함을 증가시킬 수 있다.
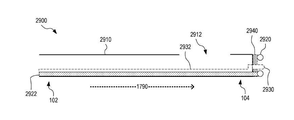
도 29는 신체 채널(392)의 더 넓은 부분에 고정되면서 신체 채널(392)로부터 표적 조직(280)의 초음파 치료를 위해 카테터를 감싸도록 구성된 하나의 카테터 슬리브(2900)를 예시한다. 하나의 사용 시나리오에서, 카테터 슬리브(2900)는 카테터(1700) 또는 카테터(2400)를 감싼다. 카테터 슬리브(2900)는 카테터 슬리브(2200)의 실시예를 형성할 수 있다. 대안적으로, 카테터 슬리브(2900)는 카테터를 영구적으로 감싸도록 구성된다.
카테터 슬리브(2900)는 CMUT 어레이(210) 또는 CMUT 어레이(112)와 같은 카테터의 초음파 변환기 어레이에 의해 방출된 초음파를 전송할 수 있는 윈도우(2912)를 갖는 관형 케이싱(2910)을 포함한다. 윈도우(2912)는 개구 또는 초음파를 전송할 수 있는 재료일 수 있다. 카테터 슬리브(2900)는 카테터 슬리브(2900)의 원위 단부(104)에 장착된 팽창 가능한 풍선(balloon)(2920), 및 그의 팽창을 위해 팽창 가능한 풍선으로 유체를 유도하여 팽창 가능한 풍선을 신체 채널(392)의 더 넓은 부분에 고정시키는 도관(2922)을 더 포함한다. 선택적으로, 카테터 슬리브(2900)는 팽창 가능한 풍선(2920)에 대한 관형 케이싱(2910)의 회전을 허용하는 회전 조인트(2940)를 더 포함한다. 회전 조인트(2940)는 CMUT 어레이(210)가 카테터 슬리브(2900)와 커플링될 때 종축(1790)을 중심으로 CMUT 어레이(210)의 회전을 용이하게 할 수 있다. 일 예에서, 회전 조인트(2940)는 -135 도 내지 +135 도의 범위 내에서 CMUT 어레이(210)의 회전을 허용한다. 일 실시예에서, 회전 조인트(2940)는 종축(1790)을 중심으로, 예를 들어 5 도 또는 10 도마다 CMUT 어레이(210)의 이산된 복수의 방위를 허용하도록 구성된다.
카테터 슬리브(2900)는 원위 단부(104)에 있는 유체 포트(2930) 및 유체 포트(2930)를 경유하여 신체 채널(392)로부터 수용된 유체를 카테터 슬리브(2900)를 통해 근위 단부(102)로 그리고 카테터 슬리브(2900)의 외부로 통과시키는 도관(2932)을 더 포함할 수 있다.
카테터 슬리브(2900)는 도관(2922)을 경유하여 팽창 가능한 풍선(2920)을 팽창시키기 위해 유체를 공급하고 선택적으로 도관(2932)을 경유하여 신체 채널(392)로부터 유체를 수용하는 외부 유체 취급 시스템과 커플링될 수 있다.
관형 케이싱(2910)은 강성 또는 연성, 또는 이의 조합일 수 있다.
도 30은 방광(196)에 고정되면서 요도(194) 내부로부터 전립선(192)의 초음파 치료를 위한 요도 카테터(3090)를 수용하도록 구성된 하나의 요도 카테터 슬리브(3000)를 예시한다. 요도 카테터(3090)는 예를 들어, 카테터(1700) 또는 카테터(2400)의 실시예이다. 카테터 슬리브(3000)는 요도(194)로부터 전립선(192)의 초음파 치료에 특히 적합한 카테터 슬리브(2900)의 실시예이다. 카테터 슬리브(3000)는 카테터 슬리브(2200)의 실시예를 형성할 수 있다. 대안적으로, 카테터 슬리브(3000)는 요도 카테터를 영구적으로 감싸도록 구성된다. 설명의 명확성을 위해, 도 30은 카테터 슬리브(3000)의 유체 도관(들) 및 선택적 회전 조인트(2940)를 도시하지 않는다.
작동시, 카테터 슬리브(3000)는 요도 카테터(3090)와 함께 또는 요도 카테터(3090)를 카테터 슬리브(3000)에 삽입하기 전에 요도(194)에 삽입된다. 다음에, 카테터 슬리브(3000)의 팽창 가능한 풍선(3020)이 팽창되어 카테터 슬리브(3000)를 방광(196)에 고정시킨다. 카테터 슬리브(3000)는 예를 들어, CMUT 어레이(210) 또는 CMUT 어레이(112)를 사용하여 전립선(192)을 요도 카테터(3090)의 팁에 의해 방출된 초음파에 노출시키기 위해 전립선(192)에서 요도 카테터(3090)의 팁의 위치 설정을 용이하게 한다. 사용의 일 예에서, 요도 카테터(3090)는 요도 카테터(3090)에 의해 전립선(192)의 초음파 치료 후 카테터 슬리브(3000)로부터 추출되는 반면에, 카테터 슬리브(3000)는 더 긴 기간 동안 제자리에 남아 있다. 다른 사용 예에서, 카테터 슬리브(3000) 및 요도 카테터(3090)는 요도(194)로부터 함께 제거된다. 요도(194)로부터 카테터 슬리브(3000)의 제거는 팽창 가능한 풍선(3020)의 수축 후에 일어난다.
도 30에 도시되지 않지만, 카테터 슬리브(3000)는 방광(196)으로부터 카테터 슬리브(3000)를 통해 요도(192) 외부로 소변을 통과시키기 위해 도관(2932)을 포함할 수 있음을 이해해야 한다.
관형 케이싱(3010)은 강성 또는 연성, 또는 이의 조합일 수 있다. 일 예에서, 방광(196)으로부터 전립선(192) 근처의 영역을 통해 걸쳐 있는 관형 케이싱(3010)의 일부분은 전립선 압력으로 인한 요도(194)의 붕괴를 방지하고 방광(196)으로부터 카테터 슬리브(3000)를 통해 그리고 요도(194)의 외부로 소변의 통과를 허용하기 위해 강성인 반면에, 관형 케이싱(3010)의 나머지 더 근위 부분은 환자의 편안함을 위해 유연하다.
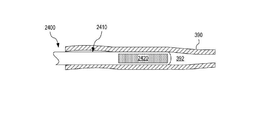
도 31은 카테터 슬리브(3100)가 신체 채널(392) 내에 있을 때 벽(390)의 적어도 하나의 특성을 감지하기 위한 하나 이상의 통합된 센서를 갖춘 하나의 카테터 슬리브(3100)를 예시한다. 카테터 슬리브(3100)는 관형 케이싱(3110) 및 관형 케이싱(3110)에 커플링되는 하나 이상의 센서(3120)를 포함한다. 센서(3120)는 센서(230)와 유사하다. 관형 케이싱(1110)은 카테터(3190)를 감싸도록 구성된다. 카테터(3190)는 예를 들어, 카테터(110)의 실시예이다. 일 실시예에서, 각각의 센서(3120)는 온도 센서이다. 다른 실시예에서, 각각의 센서(3120)는 압력 센서이다. 또 다른 실시예에서, 카테터 슬리브(3100)는 압력 및 온도 센서(3120)를 모두 포함한다.
예시적인 사용 시나리오에서, 카테터 슬리브(3100)는 그로부터 카테터(3190)의 추출 후에 일정 시간 동안 신체 채널(392)에 유지된다. 예를 들어, 카테터 슬리브(3100)는 벽(390)(예를 들어, 전립선(192) 근처의 요도(194)의 벽)의 온도 및/또는 압력을 모니터링하기 위해서, 카테터(110)에 의해 표적 조직(380)(예를 들어, 전립선(192))의 초음파 치료 후 얼마 동안 신체 채널(392)(예를 들어, 요도(194))에 유지될 수 있다. 또한, 카테터 슬리브(3100)는 초음파 치료 후에, 예를 들어 치료 유도된 부기가 가라앉을 때까지 신체 채널(392)을 개방 상태로 유지하는 역할을 할 수 있다. 카테터 슬리브(3100)가 전립선(192)의 초음파 치료를 돕기 위해 요도(194)에 사용되도록 구성되는 실시예에서, 카테터 슬리브(3100)는 초음파 치료 후 요도(194)에 남아서 그렇지 않으면, 치료 유도된 부기로 인해 잠재적으로 초래되는 요도의 완전한 막힘을 방지할 수 있고 방광(196)으로부터 카테터 슬리브(3100)를 통한 소변의 통과를 허용한다.
복수의 센서(3120)를 포함한 카테터 슬리브(3100)의 실시예는 벽(390)의 하나 이상의 특성(예컨대, 온도 및/또는 압력)을 위치의 함수로서 결정할 수 있어서, 하나 이상의 특성에 관한 공간적으로 분해된 정보를 얻을 수 있다.
관형 케이싱(1110)은 강성 또는 연성일 수 있다. 일 실시예에서, 관형 케이싱(1110)은 스테인리스 스틸과 같은 금속을 포함하거나 이로 실질적으로 구성된다. 관형 케이싱(3110)의 이러한 실시예는 강성이다. 다른 실시예에서, 관형 케이싱(1110)은 폴리머를 포함하거나 이로 실질적으로 구성된다. 관형 케이싱(1110)의 이러한 실시예는 강성 또는 연성, 또는 이의 조합일 수 있다.
카테터 슬리브(2200, 2900, 3000) 각각은 하나 이상의 센서(3120)를 포함할 수 있으며, 따라서 카테터 슬리브(3100)의 실시예를 형성한다. 또한, 각각의 관형 카테터 재킷(1920, 2300) 및 각각의 관형 벽(2410, 2510, 2610 및 2710)은 그에 커플링된 하나 이상의 센서(3120)를 가질 수 있다.
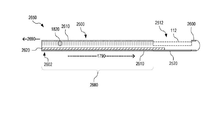
도 32는 그의 관형 케이싱(3210)에 하나 이상의 하드와이어 센서(3220)를 갖는 하나의 카테터 슬리브(3200)를 예시한다. 각각의 센서(3220)는 카테터 슬리브(3200)가 신체 채널(392) 내에 위치될 때 벽(390)의 특성을 감지하도록 구성된다. 센서(3220)는 센서(3120)의 실시예이다. 카테터 슬리브(3200)는 카테터 슬리브(3200)의 하드와이어 전기 연결을 경유하여 센서(3220)로부터 센서 신호의 판독을 용이하게 하기 위해서 센서(들)(3220)로부터 신체 채널(392) 외부에 위치된 외부 전자 회로(도 32에 도시되지 않음)로의 전기 연결(3230)을 포함하는 카테터 슬리브(3100)의 실시예이다. 일 실시예에서, 각각의 센서(3220)는 전력을 요구하는 능동 센서이고, 전기 연결부(3230)는 그러한 전력을 각각의 센서(3220)에 제공하는 추가의 역할을 한다.
일 실시예에서, 카테터 슬리브(3100)의 적어도 일부분은 유연한 폴리머의 유연성을 유지하면서 적어도 일부분의 전기 연결부(3230)가 내장되거나 그 위에 배치된 유연한 폴리머로 형성된다.
도 33은 그의 관형 케이싱(3310)에 하나 이상의 무선 통신 기반 센서(3320)를 갖는 하나의 카테터 슬리브(3300)를 도시하며, 여기서 각각의 센서(3320)는 카테터 슬리브(3300)에 삽입된 카테터(3390)에 의해 판독된다. 카테터(3390)는 센서(들)(3320)의 판독이 요구되고 다른 시간에 카테터 슬리브(3300)에 남아있을 필요가 없을 때 카테터 슬리브(3300) 내에 삽입될 수 있다. 각각의 센서(3320)는 카테터 슬리브(3300)가 신체 채널(392)에 위치될 때 벽(390)의 특성을 감지할 수 있다. 센서(3320)는 센서(3120)의 실시예이다. 카테터 슬리브(3300)는 카테터(3390)를 경유하여 센서(들)(3320)로부터의 센서 신호의 판독을 위해 구성된 카테터 슬리브(3100)의 실시예이다. 카테터(3390)는 추가 센서 판독 기능을 갖춘, 센서(들)(3320)의 판독 전용이거나 카테터(110)와 같은 초음파 치료 카테터일 수 있다. 카테터(3390)는 무선 주파수 신호를 통해 센서(3320)와 통신하고 무선 주파수 신호의 형태로 센서(3320)로부터 센서 신호를 수신하는 적어도 하나의 판독기(3392)를 포함한다. 판독기(3392)는 센서(3320)를 활성화시키기 위해 무선 주파수 신호를 센서(3320)로 추가로 방출할 수 있다.
각각의 센서(3320)는 전력을 요구하지 않는 수동 센서일 수 있다. 대안적으로, 각각의 센서(3320)는 판독기(3392)에 의해 방출된 무선 주파수 신호에 의해 활성화되는 능동 센서이다.
일 실시예에서, 카테터(3390)는 단일 판독기(3392)를 포함하고, 카테터 슬리브(3300)는 여러 센서(3320)를 포함하고, 카테터(3390)는 판독기(3392)를 순차적으로 이동시켜 센서(3320) 중 다른 하나를 판독하게 한다. 다른 실시예에서, 카테터 슬리브(3300)는 여러 센서(3320)를 포함하고, 카테터(3390)는 판독기(3392)를 이동시킴이 없이 각각의 센서(3320)를 판독하는데 충분한 무선 범위를 가지는 단일 판독기(3392)를 포함한다. 또 다른 실시예에서, 카테터 슬리브(3300)는 여러 센서(3320)를 포함하고, 카테터(3390)는 센서(3320)의 위치와 일치하도록 위치된 대응하는 판독기 세트(3392)를 포함하여, 각각의 판독기(3392)가 카테터(3390)를 이동시킬 필요없이 다른 센서(3320)의 판독 값들 사이에서 각각의 센서(3320)를 판독한다.
카테터(3390)는 각각의 판독기(3392)를 신체 채널(392) 외부의 전자 판독 회로에 커플링하는 하나 이상의 전기 연결부(3394)를 포함한다.
일 실시예에서, 카테터(3390)의 일부분은 눈금자(ruler) 또는 마킹을 포함한다. 눈금자/마킹은 카테터(3390)가 카테터 슬리브(3300)에 위치되어 센서(3320)를 판독할 때 신체 채널(392)의 외부에 및/또는 출구에 위치되는 카테터(3390)의 일부분에 위치된다. 눈금자/마킹은 센서(들)(3320)과 일치하는 위치에 전기 접점(들)(3392)을 위치시키도록 조작자를 안내한다. 일 구현예에서, 눈금자/마킹은 조작자에게 시각적 피드백을 제공한다. 다른 실시예에서, 카테터 슬리브(3300) 및 카테터(3390)는 각각의 센서(3320)에 대한 카테터 슬리브(3300) 내부의 카테터(3390)의 바람직한 안착 위치를 한정하도록 협력적으로 구성된다. 주어진 센서(3320)를 판독하기 위해서, 조작자는 카테터(3390)를 이러한 센서(3320)와 관련된 바람직한 안착 위치로 "클릭"한다. 이러한 실시예에서, 카테터(3390)는 카테터(3390)가 카테터 슬리브(3300)에 위치되어 센서(3320)를 판독할 때 신체 채널(392)의 외부에 및/또는 출구에 위치되는 카테터(3390)의 일부분에 위치된 하나 이상의 마킹을 추가로 가질 수 있으며, 여기서 각각의 마킹은 작업자에게 카테터(3390)의 관련된 안착 위치를 시각적으로 나타낸다.
대안적인 실시예에서, 각각의 센서(3320)는 외부 신체 채널(392)로부터의 무선 판독을 위해 구성된다. 이러한 실시예에서, 센서(들)(3320)는 대상자(190) 및 센서(들)(3320) 근처에 위치된 무선 판독 회로(예를 들어, 판독기(3392)와 유사함)와 협력하도록 구성될 수 있다.
도 34는 그의 관형 케이싱(3410)에 하나 이상의 센서(3420)를 갖는 하나의 카테터 슬리브(3400)를 예시하며, 각각의 센서(3420)는 카테터 슬리브(3400) 내에 삽입되고 센서(3420)와 전기적으로 접촉되게 놓인 카테터(3490)에 의해 판독되도록 구성된다. 각각의 센서(3420)는 카테터 슬리브(3400)가 신체 채널(392)에 위치될 때 벽(390)의 특성을 감지하도록 구성된다. 센서(3420)는 센서(3120)의 실시예이다. 카테터 슬리브(3400)는 하나 이상의 전기 접점(3492)을 갖는 카테터(3490)를 경유하여 센서(들)(3420)로부터 센서 신호를 판독하도록 구성된 카테터 슬리브(3100)의 실시예이다. 카테터 슬리브(3400)는 각각의 센서(3420)가 전기 접점(3492)과 물리적으로 접촉할 때 전기적으로 판독되는 것을 제외하면, 카테터 슬리브(3300)와 유사하고 카테터(3490)는 카테터(3390)와 유사하다. 카테터(3490)는 각각의 전기 접점(3492)을 신체 채널(392) 외부의 전자 판독 회로에 커플링하는 하나 이상의 전기 연결부(3494)를 포함한다. 전기 접점(3492)은 센서(3420)에 전력을 추가로 제공할 수 있다.
도 35는 고체 상태 냉각기능으로 초음파 치료하기 위한 하나의 시스템(3500)을 예시한다. 시스템(3500)은 초음파 구동 회로(3512) 및 펠티에 구동 회로(3514)를 갖는 전자 회로(3510)를 포함한다. 초음파 구동 회로(3512)는 표적 조직(280)을 초음파(270)에 노출시키기 위해서 CMUT 어레이(210 또는 112)를 구동하기 위한 구동 신호를 발생한다. 펠티어 구동 회로(3514)는 적어도 하나의 열전 냉각기(220 또는 114)에 전력을 공급하여 초음파(270)에 의해 가열된 비-표적 조직(290)을 냉각시킨다.
시스템(3500)은 전자 회로(3510)를 포함한 핸들(3560)을 포함할 수 있으며, 여기서 핸들(3560)은 CMUT 어레이(210/112) 및 열전 냉각기(들)(220/114)를 포함한 카테터(3570)에 커플링되도록 구성된다. 핸들(3560) 및 카테터(3570)는 각각, 핸들(120) 및 카테터(110)의 실시예이다. 선택적으로, 시스템(3500)은 핸들(3560) 및 카테터(3570)를 모두 포함하며 따라서 의료 장치(100)의 실시예를 형성한다. 본 발명의 범주를 벗어남이 없이, 전자 회로(3510)는 핸들(3510) 외부에서, 예를 들어 핸들(3510) 외부에서 제어 모듈(140)과 통합되게 구현될 수 있다.
일 실시예에서, 시스템(3500)은 비-표적 조직(290)(및/또는 표적 조직(280))의 특성을 결정하기 위해서 하나 이상의 센서(230)로부터의 센서 신호를 처리하는 측정 회로(3518)를 더 포함한다. 특성은 온도, 압력 또는 이의 조합일 수 있다. 대안적으로, 특성은 온도, 압력 또는 이의 조합과 관련되는 매개변수 또는 전기 신호일 수 있다. 센서(들)(230)는 카테터(3570)에서 구현될 수 있다. 대안적인 실시예에서, 측정 회로(3510)는 비-표적 조직(290)의 특성을 결정하기 위해서 카테터 슬리브(3100)의 하나 이상의 센서(3120)로부터의 센서 신호를 처리한다.
특정 실시예에서, 시스템(3500)은 표적 조직(280)에 대한 초음파 이미징을 위해 추가로 구성된다. 이들 실시예에서, 전자 회로(3510)는 (a) 표적 조직(280)을 이미지화하기 위해 CMUT 어레이(210/112)를 구동하기 위한 복수의 신호를 발생하고 (b) CMUT 어레이(210/112)로부터 수신된 결과적인 전기 변환기 신호로부터 표적 조직(280)의 초음파 이미지를 생성하는 초음파 이미지 회로(3518)를 더 포함한다.
전자 회로(3510)는 제어 모듈(3520)(제어 모듈(140)의 실시예)에 의해 적어도 부분적으로 제어되도록 구성될 수 있다. 일 실시예에서, 시스템(3500)은 제어 모듈(3520)을 더 포함한다. 핸들(3560), 카테터(3570) 및 제어 모듈(3520)은 함께 초음파 치료 시스템(130)의 실시예를 형성한다. 본 발명의 범주를 벗어남이 없이, 제어 모듈(3520)은 제 3 자에 의해 제공되는 전자 회로(3510)를 제어하도록 구성된 독립 제품일 수 있다. 일 구현예에서, 제어 모듈(3520)은 (a) 프로세서 및 (b) 프로세서에 의해 실행될 때 특정 단계를 수행하도록 전자 회로(3510)에게 명령하는 기계 판독 가능한 명령어를 저장하는 비-일시적 메모리를 갖는 컴퓨터 시스템이다. 또한, 본 발명의 범주를 벗어남이 없이, 그러한 기계 판독 가능한 명령어는 제 3 자 컴퓨터 시스템에서 구현되도록 구성된 독립형 소프트웨어 제품일 수 있다.
일 실시예에서, 제어 모듈(3520)은 치료 프로토콜에 따라서 및/또는 (a) 센서(들)(230) 또는 센서(들)(3120)와 협력하여 측정 회로(3510)에 의해 결정된 비-표적 조직(280) 및 표적 조직(290)의 특성 및/또는 (b) CMUT 어레이(210/112)와 협력하여 초음파 이미징 회로(3318)에 의해 발생된 표적 조직(280)의 초음파 이미지 중 하나 또는 둘 모두에 기초하여 표적 조직(280)을 치료하도록 전자 회로(3510)에게 명령하는 치료 제어기(3540)를 포함한다. 치료 제어기(3540)는 CMUT 어레이(210/112)를 구동하여 표적 조직(280)을 초음파(270)에 노출시키도록 초음파 구동 회로(3512)에게 명령할 수 있다. 치료 제어기(3540)는 펠티어 구동 회로(3414)에게 비-표적 조직(290)을 냉각시키기 위해 열전 냉각기(들)(220/114)를 구동시키도록 명령할 수있다. 대안적으로, 펠티어 구동 회로(3514)는 치료 제어기(3540)에 의해 직접 제어됨이 없이 작동할 수 있다. 예를 들어, 펠티어 구동 회로(3514)는 초음파 구동 회로(3512)가 CMUT 어레이(210/112)를 구동하여 초음파(270)를 발생할 때 그리고 선택적으로 그 후 설정된 지속기간 동안 열전 냉각기(들)(220/114)를 항상 구동하도록 구성될 수 있다.
제어 모듈(3520)은 측정 유닛(3532) 및 초음파 이미지 제어기(3550) 중 하나 또는 둘 모두를 더 포함할 수 있다. 측정 유닛(3512)은 센서(들)(230) 또는 센서(들)(3120)로부터 수신된 센서 신호에 기초하여 비-표적 조직(290) 및/또는 표적 조직(280)의 하나 이상의 특성(예를 들어, 온도, 압력 또는 둘 다)을 결정하기 위해서 측정 회로(3518)와 협력한다. 치료 제어기(3540)는 전자 회로(3510) 및/또는 펠티어 구동 회로(3514)의 관리에서 그러한 특성의 결정을 이용할 수 있다.
초음파 이미지 제어기(3550)는 CMUT 어레이(210/112)를 사용하여 표적 조직(280)의 초음파 이미지를 발생하기 위해서 초음파 이미지 회로(3518)와 협력한다. 초음파 이미지 제어기(3550)는 치료 제어기(3540)로부터 수신된 요청에 따라서 표적 조직(280)의 초음파 이미지를 발생하도록 초음파 이미지 회로(3518)에게 명령할 수 있다. 초음파 이미지 제어기(3550)는 예를 들어, 치료 제어기(3540)에 의해 수행된 치료 제어를 알리기 위해서 표적 조직(280)의 초음파 이미지를 처리하도록 추가로 구성될 수 있다. 초음파 이미지 제어기(3550)는 클러터 신호 유닛(3552), 도플러 이미지 유닛(3554) 및 밝기 이미지 유닛(3556) 중 하나, 둘 또는 모두를 포함할 수 있다. 클러터 신호 유닛(5521)은 (a) 공간적으로 분해된 클러터 신호를 포함하는 표적 조직(280)의 초음파 이미지를 얻도록 초음파 이미징 회로(3518)에게 명령하고, (b) 예를 들어, CMUT 어레이(210/112)에 의한 표적 조직(280)의 초음파 치료의 순간 효능을 평가할 목적으로 공간적으로 분해된 클러터 신호를 처리한다. 도플러 이미지 유닛(3554)은 예를 들어, 표적 조직(280)에서 혈액 관류의 정도를 평가할 목적으로 표적 조직(280)의 도플러 이미지를 얻기 위해서 초음파 이미지 회로(3518)에게 명령한다. 밝기 이미지 유닛(3556)은 표적 조직(280) 및/또는 CMUT 어레이(210/112) 근처의 다른 표적 조직의 하나 이상의 밝기 이미지를 얻기 위해서 초음파 이미지 회로(3518)에게 명령한다. 그러한 밝기 이미지는 표적 조직(280)에 대한 CMUT 어레이(210/112)의 위치 설정을 평가하는데 사용될 수 있다.
실시예에서, 치료 제어기(3540)는 CMUT 어레이(210/112)에 의해 발생된 초음파(270)를 빔포밍하도록 초음파 구동 회로(3512)에게 명령하는 빔포밍 유닛(5422)을 포함한다. 빔포밍 유닛(5422)은 초음파(270)를 표적 조직(280)의 하나 이상의 국소 영역에 포커싱하는 방식으로 CMUT 어레이(210/112)를 구동하기 위해 복수의 구동 신호를 발생하도록 초음파 구동 회로(3512)에게 명령할 수 있다. 치료 제어기(3540)는 빔포밍 유닛(5422)에 의해 실시될 원하는 빔포밍을 결정하기 위해서 초음파 이미지 제어기(3550)로부터 수신된 데이터를 이용할 수 있다.
본 발명의 범주를 벗어남이 없이, 제어 모듈(3520)의 기능 중 일부 또는 전부가 핸들(3560)에 포함될 수 있다.
도 36은 CMUT 어레이 및 고체 상태 냉각기능을 갖춘 하나의 의료 장치(3600)를 예시한다. 의료 장치(3600)는 핸들(3560) 및 카테터(3570)를 포함한다. 카테터(3570)는 카테터(3570)의 원위 단부(104)에 있는 카테터 팁(3670)에서 CMUT-TEC 장치(200)를 구현한다. 카테터(3570)는 CMUT-TEC 장치(200)와 전자 회로(3510)를 통신적으로 커플링하는 전기 연결부(3610)를 포함한다. 전기 연결부(3610)는 하나 이상의 유연한 케이블 및/또는 하나 이상의 동축 케이블을 포함할 수 있다. 선택적으로, 카테터(3570)는 카테터(3570)의 근위 단부(102)까지 부분적으로만 연장하는 고체 열 전도체(1720)의 실시예를 포함한다.
실시예에서, 핸들(3560)은 카테터 팁(3670) 또는 그 일부분의 위치를 조정할 수 있는 하나 이상의 작동기(actuator)(3620)를 포함한다. 작동시, 작동기(들)(3620)는 기준 위치에 대해 카테터 팁(3670)을 위치시키는데 사용될 수 있다. 기준 위치는 표적 조직(280)과 관련될 수 있다. 일 예에서, 핸들(3560)은 카테터 팁(3670)을 전립선(192)에 대해 원하는 방식으로 위치시키는 작동기(3620)를 포함한다. 대안적으로, 기준 위치는 카테터 슬리브(2200)와 같은 카테터 슬리브(도 36에 도시되지 않음)와 관련될 수 있다. 일 구현예에서, 핸들(3560)은 카테터(3570)의 종축(1790)을 중심으로 카테터 팁(3670) 또는 모든 카테터(3570)를 회전시킬 수 있는 작동기(3620)를 포함한다. 이러한 구현예에서, 카테터(3570)는 회전 조인트(2940)와 같은 회전 조인트를 포함할 수 있다. 다른 구현예에서, 핸들(3560)은 종축(1790)을 따라서 카테터 팁(3670) 또는 모든 카테터(3570)를 병진 운동시킬 수 있는 작동기(3620)를 포함한다. 또 다른 구현예에서, 핸들(3560)은 종축(1790)을 따라서 카테터 팁(3670) 또는 모든 카테터(3570)를 협력하여 병진 운동시킬 수 있고 또한, 종축(1790)을 중심으로 회전 카테터 팁(3670) 또는 모든 카테터(3570)를 협력하여 병진 운동시킬 수 있는 작동기(3620)를 포함한다. 하나 이상의 작동기(3620)를 포함한 핸들(3560)의 실시예는 카테터 팁(3670)의 각각의 위치 또는 방위를 나타내는 하나 이상의 표시기(3622)를 각각 더 포함할 수 있다.
의료 장치(3600)는 시스템(3500)의 실시예인 초음파 치료 시스템(3602)을 형성하기 위해서 제어 모듈(3520)을 더 포함할 수 있다.
도 37은 CMUT 어레이, 고체 상태 냉각기능 및 관련 고체 열 제거기능을 갖춘 하나의 의료 장치(3700)를 예시한다. 의료 장치(3700)는 의료 장치(3600)의 실시예이며, 카테터(3570)는 근위 단부(102)로 또는 근위 단부를 넘어 완전히 연장하는 고체 열 전도체(1720)의 실시예를 포함한다. 이러한 실시예에서, 핸들(3560)은 고체 열 전도체(1720)를 냉각시키기 위해 열 교환기(1730)를 더 포함할 수 있다.
의료 장치(3700)는 시스템(3500)의 실시예인 초음파 치료 시스템(3702)을 형성하기 위해서 제어 모듈(3520)을 더 포함할 수 있다.
도 38은 CMUT 어레이 및 고체 상태 냉각기능을 갖춘 하나의 의료 시스템(3800)을 예시하며, 신체 채널(392)에 고정되도록 구성된 카테터 슬리브(2900)를 더 포함한다. 일 구현예에서, 의료 시스템(3800)은 요도(194)로부터 전립선(192)의 초음파 치료에 적합하며, 카테터 슬리브(2900)는 방광(196)에 고정되도록 구성된다. 의료 시스템(3800)은 카테터 슬리브(2900)를 더 포함하는 장치(3600) 또는 장치(3700)의 확장이다. 의료 시스템(3800)에서, 카테터 슬리브(2900)는 카테터(3570)를 감싼다. 의료 시스템(3800)은 핸들(3560)의 실시예인 핸들(3860)을 포함한다. 핸들(3860)은 도관(2922)에 연결된 팽창 제어기(3810)를 포함하고 (방광(196)과 같은)카테터 슬리브를 신체 채널(392)에 고정시키기 위해 팽창 가능한 풍선(2920)을 팽창(또는 수축)시키도록 구성된다. 핸들(3860)은 유체 포트(2930)로부터 도관(2932)을 통과한 유체를 수용하고 취급하는 유체 핸들러(3820)를 더 포함할 수 있다.
선택적으로, 의료 시스템(3800)은 하나 이상의 센서(3120)로 카테터 슬리브(2900)를 구현한다. 의료 시스템(3800)은 시스템(3500)의 실시예를 형성하기 위해서 제어 모듈(3520)을 더 포함할 수 있다.
도 39는 초음파 치료를 제어하기 위한 하나의 시스템(3900)을 예시한다. 시스템(3900)은 프로세서(3910), 프로세서(3910)와 통신 가능하게 커플링된 메모리(3920), 및 프로세서(3910)와 통신 가능하게 커플링되고 또한 시스템(3900)을 전자 회로(3510)와 통신 가능하게 커플링하도록 구성된 인터페이스(3990)를 포함한다. 시스템(3910)은 제어 모듈(3520)의 실시예이다.
메모리(3920)는 기계 판독 가능한 명령어(3930) 및 센서 측정값(3970)과 선택적으로 초음파 이미지(3980)을 저장하는 데이터 저장 장치(3960)를 포함하는 비-일시적 메모리이다. 기계 판독 가능한 명령어(3930)는 프로세서(3910)에 의해 실행될 때, 전자 회로(3510)에게 표적 조직(280)의 초음파 치료를 수행하도록 명령하는 치료 제어 명령어(3940)를 포함한다. 함께, 치료 제어 명령어(3940) 및 프로세서(3910)는 치료 제어기(3540)의 실시예를 형성한다. 치료 제어 명령어(3940)는 프로세서(3910)에 의해 실행될 때, CMUT 어레이(210/112)에 의해 발생된 초음파(270)를 빔포밍하도록 초음파 구동 회로(3512)에게 명령하는 빔포밍 명령어(3942)를 포함할 수 있다. 빔포밍 명령어(3942)는 빔포밍 유닛(5422)의 실시예를 형성하기 위해서 프로세서(3910)와 협력한다.
기계-판독 가능한 명령어(3930)는 명령 측정 회로(3518)를 프로세서(3910)에 의해 실행할 때, (a) 센서(들)(230) 또는 센서(들)(3120)로부터 하나 이상의 조직 특성 측정값을 얻고, (b) 조직 특성 측정 측정값을 센서 측정값(3970)에 저장하고, 선택적으로 (c) 조직 특성 측정값을 추가로 처리하는 측정값 명령어(3932)를 더 포함한다.
함께, 측정값 명령어(3932) 및 프로세서(3910)는 측정 유닛(3352)의 실시예를 형성한다. 기계 판독 가능한 명령어(3930)는 또한, 임계 온도(3944) 및 임계 압력(3936) 중 하나 또는 둘 모두를 포함할 수 있다. 치료 제어 명령어(3942) 또는 측정 명령어(3932)는 프로세서(3910)에 의해 실행될 때, (a) 센서 측정값(3970)으로부터 측정 온도(3910) 또는 측정 압력(3998)을 검색하고, (b) 측정 온도(3910) 또는 측정 압력(3998)을 각각의 임계 온도(3934) 및 임계 압력(3936)과 비교하고, (c) 그에 따라 초음파 처리를 조정할 수 있다.
실시예에서, 기계-판독 가능한 명령어(3930)는 프로세서(3910)에 의해 실행될 때, CMUT 어레이(210/112)를 사용하여 표적 조직(280)의 초음파 이미지를 얻기 위해 초음파 이미징 회로(3518)에게 명령하는 초음파 이미징 명령어(3950)를 더 포함한다. 초음파 이미징 명령어(3950) 및 프로세서(3910)는 초음파 이미징 제어기(3550)의 실시예를 형성하도록 협력한다. 초음파 이미징 명령어(3950)는 클러터 신호 명령어(3952), 도플러 이미징 명령어(3954), 및 밝기 이미징 명령어(3956) 중 하나, 둘 또는 모두를 포함할 수 있다. 클러터 신호 명령어(3952), 도플러 이미징 명령어(3954), 및 밝기 이미징 명령어(3956) 각각은 각각의 클러터 신호 유닛(5522), 도플러 이미징 유닛(3554) 및 밝기 이미징 유닛(3556)의 기능을 수행하기 위해서 프로세서(3910)에 의해 실행 가능하다. 초음파 이미징 명령어(3950)는 초음파 이미지(3980)를 데이터 저장 장치(3960)에 저장하도록 구성될 수 있다. 클러터 신호 명령어(3952), 도플러 이미징 명령어(3954) 및 밝기 이미징 명령어(3956)는 프로세서(3910)에 의해 실행될 때, 데이터 저장 장치(3960), 각각의 클러터 신호 이미지(3982), 도플러 이미지(3984) 및 밝기 이미지(3986)로부터 얻고 저장할 수 있다.
본 발명의 범주를 벗어남이 없이, 기계 판독 가능한 명령어(3930)는 제 3 자 컴퓨터 시스템에서 구현되도록 구성된 독립 소프트웨어 제품일 수 있다.
도 40은 향상된 초음파 치료를 위한 시스템(4000)을 예시한다. 시스템(4000)은 초음파 변환기 어레이(4010) 및 음향 미러(4020)를 포함한다. 작동 시, 초음파 변환기 어레이(4010) 및 음향 미러(4020)는 표적 조직(280)을 포함하는 음향 공동(4040)을 형성하기 위해서 표적 조직(280)의 대향 측면에 위치된다. 초음파 변환기 어레이(4010)에 의해 발생되고 음향 공동(4040)에 커플링된 초음파(초음파 변환기 어레이(4010)와 음향 미러(4020) 사이의 정재파의 형태)는 음향 공동(4040)에 의해 증폭된다. 이러한 증폭은 음향 공동(4040)의 부재 시에 달성될 수 있는 것과 비교하여 표적 조직(280)에서 초음파 세기의 증가를 초래한다. 작동 시, 초음파 변환기 어레이(4010)는 음향 공동(4040)의 공명 조건을 충족시키는 주파수에서 초음파를 방출하여 정상파를 확립한다. 음향 공동(4040) 내의 조직의 특성이 초음파에 응답하여 변화함에 따라서, 공명 조건이 변할 수 있으며, 그 경우에 초음파 변환기 어레이(4010)는 정상파를 유지 또는 재확립하기 위해서 초음파 주파수를 조정할 수 있다.
초음파 변환기 어레이(4010)는 초음파 방출 면(4016)을 가진다. 방출 면(4016)은 초음파 공동(4010)에 의해 방출된 초음파를 음향 공동(4040)에 효율적으로 커플링하기 위해서 음향 공동(4040)의 길이 축에 직교하게 지향될 수 있다. 일부 사용 시나리오에서, 방출 면(4016)이 음향 공동(4040)의 길이 축에 직교하지 않도록 지향하는 것이 필요하거나 유리할 수 있다. 그러한 시나리오에서, 초음파 변환기 어레이(4010)는 음향 공동(4040)의 길이 축에 실질적으로 평행한 방향으로 지향되도록 초음파를 빔포밍하도록 작동될 수 있다.
시스템(4000)은 초음파 변환기 어레이(4010)로서 CMUT 어레이(112)를 구현할 수 있다. 대안적으로, 초음파 변환기 어레이(4010)는 압전 변환기 어레이와 같은 다른 유형일 수 있다.
실시예에서, 시스템(4000)은 신체 채널(392)에 변환기 어레이(4010)를 배치할 수 있도록 변환기 어레이(4010)를 포함하는 카테터(4012)를 포함한다. 이러한 실시예에서, 음향 미러(4020)는 표적 조직(280)의 위치에 따라서 신체 채널(392) 내에, 신체 외부에 또는 다른 신체 채널 내에 배치될 수 있다. 카테터(4012)는 초음파 변환기 어레이(4010)로서 CMUT 어레이(112)를 구현하고, 카테터(110)의 실시예를 형성하기 위해서 열전 냉각기(114)를 추가로 구현할 수 있다.
시스템(4000)은 하나 이상의 추가의 음향 미러(4030)를 포함할 수 있다. 각각의 음향 미러(4030)는 초음파 변환기 어레이(4010)와 협력하여 각각의 음향 공동(4050)을 형성할 수 있다. 각각의 음향 미러(4030)는 상이한 표적 조직 부분(4080)의 치료를 허용한다. 하나의 사용 시나리오에서, 초음파 변환기 어레이(4010)는 먼저 초음파를 음향 공동(4040)에 커플링하여 음향 공동(4040) 내에 위치된 표적 조직(280)을 치료하고; 초음파 변환기 어레이(4010)는 그 후 음향 공동(4040) 외부이고 음향 공동(4050) 내에 위치된 표적 조직 부분(4080)을 치료하기 위해서 초음파를 음향 공동(4050)에 커플링하도록 재지향된다.
초음파 변환기(4010)의 특정 실시예는 2 개의 대향하는 방출 면(4016 및 4018)을 가진다. 그러한 실시예에서, 초음파 변환기 장치(4010)는 음향 미러(4020)와 음향 미러(4020)를 향하는 음향 미러(4030) 사이에 위치될 수 있다. 음향 공동(4040 및 4050)으로 방출된 초음파의 효율적인 커플링은 음향 공동(4040 및 4050)의 길이 축에 직교하는 방출 면(4016 및 4018)을 지향시키고/시키거나 초음파 변환기 어레이(4010)에 의해 방출된 초음파를 빔포밍함으로써 보장될 수 있다.
도 41은 요도(194)의 고체 상태 냉각기능으로 전립선(192)의 초음파 치료를 향상시키기 위한 시스템(4100)을 예시한다. 시스템(4100)은 시스템(4000)의 실시예이다. 시스템(4100)은 (a) 요도(194) 내로 삽입되어 CMUT 어레이(112)를 전립선(192)에 위치시키도록 구성된 카테터(110), (b) 대상자(190)의 신체 외부에서 전립선(192)의 전방에 위치되도록 구성된 음향 미러(4120), 및 (c) 음향 미러(4130)를 포함하고 대상자(190)의 직장(4190) 내로 삽입되어 음향 미러(4130)를 전립선(192)의 후방에 위치시키도록 구성된 직장 카테터(1422)를 포함한다. 초음파 변환기는 이에 의해 음향 미러(4120 및 4130) 중 어느 하나와 음향 공동을 형성하여, 전립선(192)의 일부를 포함하는 음향 공동을 형성할 수 있다. 이러한 음향 공동은 CMUT 어레이(112)에 의해 발생된 초음파의 전립선(192)에서 세기를 증가시킨다.
시스템(4100)은 핸들(120), 및 선택적으로 제어 모듈(140)을 더 포함할 수 있다. 또한, 직장 카테터(1422)에는 핸들(4144)이 장착될 수 있다.
일 구현예에서, 음향 미러(4120)는 대상자(190)의 피부와 음향 미러(4120) 사이에서 초음파를 전송하는 버퍼(4122)와 커플링된다. 버퍼(4122)는 예를 들어, 유체 충전 백(bag), 겔 충전 백 또는 단단한 플라스틱 물체이다. 버퍼(4122)는 CMUT 어레이(112)에 의해 방출된 초음파가 대상자(190)의 피부에서 공기-조직 계면에 의해 반사/산란되는 것을 방지하기 위해서, 음향 미러(4120)와 환자(190)의 피부 사이의 공극을 제거하거나 적어도 감소시킨다. 버퍼(4122)는 에어 갭을 제거하기 위해서 대상자(190)의 피부에 대해 밀릴 수 있다. 대안적으로, 음향 미러(4120)는 버퍼(4122)를 사용함이 없이 음향 미러(4120)와 대상자(190)의 피부 사이의 공극을 제거하기 위해서 대상자(190)의 피부에 대해 직접적으로 또는 그 사이의 겔에 의해 밀릴 수 있다. 마찬가지로, 음향 미러(4130)는 (a) 버퍼(4132)(버퍼(4122)와 유사함)와 커플링되거나, (b) 직장 벽(4190)에 대해 직접적으로 밀릴 수 있고, 선택적으로 음향 미러(4130)와 직장 벽(1901) 사이의 겔에 의해 밀릴 수 있다.
하나의 예시적인 시나리오에서, CMUT 어레이(112)로부터의 초음파 방출은 초음파 변환기(4110) 및 음향 미러(4120 또는 4130)에 의해 형성된 음향 공동을 따라 지향되도록 빔포밍되어, CMUT 어레이(112)로부터의 초음파 방출을 음향 공동에 효과적으로 커플링시킨다. 다른 예시적인 시나리오에서, CMUT 어레이(112) 및 음향 미러(4120 또는 4130)는 CMUT 어레이(112)의 방출 면이 초음파 변환기(4110) 및 음향 미러(4120 또는 4130)에 의해 형성된 음향 공동의 길이 축에 직교하도록 위치된다.
본 발명의 범주를 벗어남이 없이, 시스템(4100)의 CMUT 어레이(112)는 압전 변환기 어레이와 같은 다른 유형의 초음파 변환기 어레이로 대체될 수 있다. 이러한 경우에, 시스템(4100)은 고체 상태 냉각기능을 갖는 카테터(110) 대신에 액체 냉각기능으로 카테터를 구현할 수 있다. 또한, 본 발명의 범주를 벗어남이 없이, 시스템(4100)에는 음향 미러(4120) 및 직장 카테터(1422) 중 하나만이 제공될 수 있다. 예를 들어, 표적 조직이 전립선(192)의 전방 부분에 독점적으로 존재하면, 직장 카테터(1422)는 필요하지 않다.
도 42는 향상된 초음파 치료를 위한 다른 시스템(4200)을 예시한다. 시스템(4200)은 각각의 초음파 방출 면(4212 및 4222)을 갖는 2 개의 초음파 변환기 어레이(4210 및 4220)를 포함한다. 작동 시, 초음파 변환기 어레이(4210 및 4220)는 표적 조직(280)을 포함하는 음향 공동(4240)을 형성하기 위해서 초음파 방출 면(4212 및 4222)이 실질적으로 서로 마주보도록 표적 조직(280)의 대향 측에 위치된다. 초음파 변환기 어레이(4210 및 4220)에 의해 발생되고 음향 공동(4240)에 커플링된 초음파(음향 미러(4020 및 4030) 사이의 정재파 형태)는 음향 공동(4240)에 의해 증폭된다. 이러한 증폭은 음향 공동에 커플링되거나 통합되지 않은 단일 초음파 변환기 어레이에 의해 달성될 수 있는 것과 비교하여, 표적 조직(280)에서 초음파 세기의 증가를 초래한다.
또한, 시스템(4200)은 하나 이상의 안티노드(antinode)의 위치를 스위핑(sweep)하기 위해서 음향 공동(4240) 내부의 정상파 패턴의 튜닝을 가능하게 한다. 작동 시, 초음파 변환기 어레이(4210 및 4220)는 동일한 주파수에서 구동될 수 있지만 서로에 대해 조정 가능한 위상 편이로 구동될 수 있다. 초음파 변환기 어레이(4210)에 의해 발생된 초음파와 초음파 변환기 어레이(4220)에 의해 발생된 초음파 사이의 위상 편이는 음향 공동(4240) 내의 안티노드의 위치를 결정한다. 하나의 사용 시나리오에서, 이러한 위상 편이는 국소 표적 조직의 위치에 안티노드를 정확하게 위치시켜서 이러한 국소화된 표적 조직에 비교적 많은 양의 에너지를 전달하도록 조정된다. 다른 사용 시나리오에서, 위상 편이는 고정된 정상파 패턴과 관련된 것보다 더욱 균일한 방식으로 표적 조직에 에너지를 전달하기 위해서 더욱 확장된 표적 조직에 걸쳐서 하나 이상의 안티노드의 위치를 스위핑하도록 변화된다.
시스템(4200)은 CMUT 어레이(112)로서 초음파 변환기 어레이(4210 및 4220) 중 하나 또는 둘 모두를 구현할 수 있다. 그러나, 초음파 변환기 어레이(4210 및 4220) 중 하나 또는 둘 모두는 압전 변환기 어레이와 같은 상이한 유형일 수 있다.
실시예에서, 시스템(4200)은 신체 채널(392)에 변환기 어레이(4210)의 배치를 가능하게 하기 위해서 변환기 어레이(4210)를 포함하는 카테터(4212)를 포함한다. 이러한 실시예에서, 초음파 변환기 어레이(4220)는 표적 조직(280)의 위치에 따라서 신체 외부 또는 다른 신체 채널 내에 배치될 수 있다. 카테터(4212)는 초음파 변환기 어레이(4210)로서 CMUT 어레이(112)를 구현하고, 열전 냉각기(114)를 추가로 구현할 수 있어서, 카테터(110)의 실시예를 형성한다. 초음파 변환기 어레이(4220)가 신체 채널 내부에 위치하도록 구성되는 실시예에서, 시스템(4200)은 변환기 어레이(4210)를 포함하는 카테터(4222)를 포함할 수 있다. 카테터(4220)는 열전 냉각기(114)를 더 포함할 수 있다.
초음파 변환기 어레이(4210 및 4220) 중 어느 하나 또는 둘 모두는 예를 들어, 표적 조직(280)에 대한 초음파 변환기 어레이(4210 및 4220) 중 다른 하나의 위치를 확인하기 위해서 및/또는 초음파 이미지를 제공하여 치료 효능을 평가기 위해서 초음파 이미징을 수행할 수 있다. 또한, 초음파 변환기 어레이(4210 및 4220)는 협력하여 표적 조직(280)의 초음파 투과 이미지를 발생할 수 있고, 초음파 변환기 어레이(4210 및 4220) 중 하나는 초음파 변환기 어레이(4210 및 4220) 중 다른 하나에 의해서 방출된 초음파를 이미지화한다. 그러한 초음파 이미지는 치료 효능의 평가에 사용될 클러터 신호를 제공할 수 있다.
시스템(4200)의 특정 실시예는 각각의 초음파 변환기 어레이(4210, 4220)에 의한 초음파 발생 및 선택적으로 초음파 이미징을 제어하는 제어 모듈(4240)을 더 포함한다. 제어 모듈(4240)은 음향 공동(4240) 내에서 정상파의 안티노드(들)의 위치를 조정하기 위해서 초음파 변환기 어레이(4210)에 의해 방출된 초음파와 초음파 변환기 어레이(4220) 사이의 위상 편이를 조정하도록 구성될 수 있다. 제어 모듈(4240)의 하나의 그러한 실시예는 표적 조직(280)을 실질적으로 균일하게 노출시키기 위해서 이러한 위상 편이를 스위핑(sweep)할 수 있다. 제어 모듈은 비-일시적 메모리에 인코딩된 기계 판독 가능한 명령어, 및 위상 편이를 조정 또는 스위핑하기 위해 기계 판독 가능한 명령어를 실행하는 프로세서를 포함할 수 있다.
도 43은 요도(194)의 고체 상태 냉각기능으로 전립선(192)의 향상된 초음파 치료를 위한 다른 시스템(4300)을 예시한다. 시스템(4300)은 시스템(4200)의 실시예이다. 시스템(4300)은 (a) 요도(194)에 삽입되어 CMUT 어레이(112)를 전립선(192)에 위치시키도록 구성된 카테터(110), 및 (b) 전립선(192)의 일부분을 포함하는 음향 공동(4240)의 실시예를 형성하기 위해 CMUT(112)와 협력하도록 구성되는 초음파 변환기 어레이(4220)를 포함한다. 시스템(4300)에서, CMUT 어레이(112)는 초음파 변환기 어레이(4210)의 실시예이다.
일 실시예에서, 시스템(4300)은 초음파 변환기 어레이(4220)(도 43에서 초음파 변환기 어레이(4220(1)로 도시됨))를 포함하고 전립선(192)의 후방에 초음파 변환기 어레이(4220)를 위치시키기 위해서 대상자(190)의 직장(4190) 내에 삽입되도록 구성되는 직장 카테터(4334)를 포함한다. 시스템(4300)의 이러한 실시예는 전립선(192)의 후방의 향상된 초음파 치료를 용이하게 한다. 다른 실시예에서, 시스템(4300)은 대상자(190)의 신체 외부에서 전립선(192)의 전방에 배치되도록 구성된 초음파 변환기 어레이(4220)(도 43에서 초음파 변환기 어레이(4220(2))로 도시됨)의 실시예를 포함한다. 시스템(4300)의 이러한 실시예는 전립선(192)의 전방의 향상된 초음파 치료를 용이하게 한다. 또 다른 실시예에서, 시스템(4300)은 전립선(192)의 전방 및 후방 부분의 순차적 또는 교대 치료를 용이하게 하기 위해서 직장 카테터(4334) 및 초음파 변환기 어레이(4220(2))를 모두 포함한다. CMUT 어레이(112)는 전립선(192)의 전방 및 후방 부분을 치료하기 위한 필요에 따라서 전방 방향 또는 후방 방향으로 향하도록 지향될 수 있음을 이해해야 한다.
시스템(4300)은 핸들(120) 및 선택적으로 제어 모듈(4340)을 더 포함할 수 있다. 또한, 직장 카테터(4434)에는 핸들(4444)이 장착될 수 있다. 제어 모듈(4340)은 제어 모듈(140)의 실시예이고 또한 제어 모듈(4240)의 실시예이다. 제어 모듈(4240)은 (a) CMUT 어레이(112) 및 (b) 초음파 변환기(4220(1)) 및/또는 초음파 변환기 어레이(4220(2))에 의해 초음파 발생을 제어하도록 구성된다. 실시예에서, 제어 모듈(4340)은 CMUT 어레이(112)에 의해 생성된 초음파와 초음파 변환기 어레이(4220(1)/4220(2)) 사이의 위상 편이를 도 42를 참조하여 위에서 논의된 것과 유사한 방식으로 조정할 수 있다.
일 구현예에서, 초음파 변환기 어레이(4220(2))는 초음파 변환기 어레이(4220(2)) 또는 CMUT 어레이(112)에 의해 발생된 초음파가 대상자(190)의 피부에서 공기-조직 인터페이스에 의해 반사/산란되는 것을 방지하기 위해서, 초음파 변환기 어레이(4220(2))와 환자(190)의 피부 사이의 공극을 제거하거나 적어도 감소시키도록 버퍼(4122)와 커플링된다. 대안적으로, 초음파 변환기 어레이(4220(2))는 버퍼(4122)를 사용함이 없이 초음파 변환기 어레이(4220(2))와 대상자(190)의 피부 사이의 공극을 제거하기 위해서 대상자(190)의 피부에 대해 직접적으로 또는 그 사이의 겔에 의해 밀릴 수 있다. 마찬가지로, 초음파 변환기 어레이(4220(1))는 (a) 버퍼(4132)에 커플링되거나, (b) 직장(4990)의 벽에 대해 직접적으로 밀리고, 선택적으로 초음파 변환기 어레이(4220(1))와 직장의 벽(4190) 사이의 겔에 의해 밀릴 수 있다.
CMUT 어레이(112), 초음파 변환기 어레이(4220(1)) 및 초음파 변환기 어레이(4220(2)) 중 어느 하나는 예를 들어, CMUT 어레이(112), 초음파 변환기 어레이(4220(1)) 및 초음파 변환기 어레이(4220(2)) 중 다른 하나의 위치 설정을 확인하기 위해 초음파 이미징을 수행할 수 있다.
본 발명의 범주를 벗어남이 없이, 시스템(4300)의 CMUT 어레이(112)는 압전 변환기 어레이와 같은 다른 유형의 초음파 변환기 어레이로 대체될 수 있다. 이러한 경우에, 시스템(4300)은 또한, 고체 냉각기능을 갖는 카테터(110) 대신에 액체 냉각기능을 갖는 카테터를 구현할 수 있다.
도 44는 고체 상태 냉각기능으로 초음파 치료를 위한 하나의 방법(4400)을 예시한다. 방법(4400)은 예를 들어 카테터(110)에 의해 수행된다. 방법(4400)의 성능은 전자 회로(3510)를 이용하는 치료 제어기(3540)에 의해 명령될 수 있다. 방법(4400)의 특정 실시예는 치료 제어 명령어(3940)로서 기계 판독 가능한 명령어(3930)로 인코팅될 수 있다. 방법(4400)의 다른 실시예는 측정 명령어(3932)와 초음파 이미징 명령어(3950) 중 하나 또는 둘 모두와 조합하여 치료 제어 명령어(3940)로서 기계 판독 가능한 명령어(3930)로 인코팅될 수 있다.
방법(4400)은 단계(4410, 4420 및 4430)를 포함한다. 단계(4410)는 표적 조직(280)과 같은 표적 조직을 CMUT 어레이에 의해 발생된 초음파에 노출시킨다. CMUT 어레이는 신체 채널을 통해 카테터의 표적 조직으로 전진될 수 있다. 단계(4420)는 비-표적 조직의 손상을 방지하기 위해서 비-표적 조직(290)과 같은 비-표적 조직을 냉각시키기 위해서 하나 이상의 열전 냉각기를 사용한다. CMUT 어레이가 신체 채널을 통해 카테터의 표적 조직으로 전진되는 실시예에서, 비-표적 조직은 신체 채널의 벽의 적어도 일부분이거나 이를 포함할 수 있고, 각각의 열전 냉각기는 CMUT 어레이 및/또는 카테터에 커플링된다. 단계(4430)는 열전 냉각기(들) 및 비-표적 조직, 예를 들어 신체 채널의 벽으로부터 열을 제거한다. 방법(4400)의 일 예에서, CMUT 어레이(210)는 단계(4410)에서 신체 채널(392)로부터 표적 조직(380)을 초음파(270)에 노출시키고, 단계(4420)에서 열전 냉각기(들)(220)는 벽(390)을 냉각시키고, 고체 열 전도체(710)는 단계(4430)에서 열전 냉각기(들)(230) 및 벽(390)으로부터 열을 제거한다. 방법(4400)의 이러한 예에서, CMUT 어레이(210) 및 열전 냉각기(들)(230)는 카테터(110)의 표적 조직(380)으로 전진될 수 있다.
도 44에 순차적인 것으로 도시되지만, 단계(4410, 4420 및 4430)는 병렬로 수행될 수 있음을 이해해야 한다.
실시예에서, 단계(4430)는 열전 냉각기(들)에 커플링된 고체 열 전도체를 통해 열전 냉각기(들)로부터 멀리 열을 전도하는 단계(4432)를 포함한다. CMUT 어레이가 신체 채널을 통해 카테터의 표적 조직으로 전진되는 실시예에서, 고체 열 전도체는 신체 채널의 출구 쪽으로 카테터를 통해 연장한다. 고체 열 전도체는 신체 채널의 출구까지 완전히 연장할 수 있거나 신체 채널의 출구 쪽으로 부분적으로만 연장할 수 있다. 고체 열 전도체가 신체 채널의 출구 쪽으로 부분적으로만 연장하는 경우에, 고체 열 전도체는 신체 조직과 접촉하여 카테터 벽의 온도를 임계 값 아래로 유지하면서, 카테터의 일부분을 따라 열전 냉각기(들)로부터 제거된 열을 (예를 들어, 균일하게)재분배하도록 구성될 수 있다. 단계(4430)의 일 예에서, 고체 열 전도체(1720 또는 2620)는 각각, 열전 냉각기(들)(220 및 2520)로부터 멀리 열을 전도시킨다. 단계(4432)는 신체 채널 외부에서 고체 열 전도체를 냉각시키는 단계(4434)를 포함할 수 있다. 단계(4434)의 일 예에서, 열 교환기(1730)는 신체 채널(392) 외부의 고체 열 전도체(1720)를 냉각시키거나, 유사한 열 교환기가 신체 채널(392) 외부의 고체 열 전도체(2620)를 냉각시킨다.
특정 실시예에서, 단계(4410)는 온도 측정, 압력 측정 및/또는 초음파 이미지로 나타낸 치료 효능에 따라 초음파 노출을 조정하는 단계(4412)를 포함한다. 예를 들어, 단계(4410)에서의 초음파 노출은 벽(390)의 압력이 임계 압력을 초과하는 경우에, 벽(390)의 온도가 임계 온도를 초과하면 적어도 일시적으로 정지될 수 있고; 단계(4410)에서의 초음파 노출은 표적 조직(380)이 표적 온도에 또는 그 근처에 있음을 벽(390)의 온도 또는 압력이 나타내면 중지되거나 감소될 수 있고; 또는 단계(4410)에서의 초음파 노출은 표적 조직(380)의 초음파 이미지에 기초하여 표적 조직(380)에서의 온도, 탄성, 에코 발생도, 괴사 또는 치료 효능의 평가에 따라 조정될 수 있다. 요도(194)로부터 전립선(192)의 초음파 치료와 관련된 하나의 사용 시나리오에서, 임계 온도는 요도(194)에 대한 손상을 방지하기 위해서 41 내지 45 ℃의 범위, 예컨대 42 ℃에 있다. 표적 조직(380) 및 잠재적으로 또한 벽(390)의 가열은 조직의 부기를 유발할 수 있다. 단계(4412)에서 임계 압력의 구현은 부기 정도를 허용 가능한 범위로 유지하는 것을 도울 수 있다.
하나의 그러한 실시예에서, 방법(4400)은 비-표적 조직, 예를 들어 신체 채널의 벽의 온도 및/또는 압력을 모니터링하는 단계(4440)를 더 포함한다. 이러한 실시예의 일 예에서, 센서(들)(230) 또는 센서(들)(3120)은 단계(4440)에서 벽(390)의 온도 및/또는 압력을 모니터링하고, CMUT 어레이(210)에 의한 초음파 노출은 단계(4412)에서 이러한 온도 및/또는 압력에 따라서 조정된다. 방법(4400)은 단계(4410)와 병렬로 단계(4440)를 수행할 수 있다.
다른 그러한 실시예에서, 방법(4400)은 CMUT 어레이를 사용하여 표적 조직을 이미징함으로써 표적 조직에 대한 초음파 치료 효능을 나타내는 초음파 이미지를 얻는 단계(4450)를 더 포함한다. 이러한 실시예의 일 예에서, CMUT 어레이(210)는 표적 조직(380)을 이미지화하고, CMUT 어레이(210)에 의한 초음파 노출은 CMUT 어레이(210)로부터 얻은 초음파 이미지에 의해 나타낸 치료 효능에 따라서 단계(4412)에서 조정된다. 방법(4400)은 단계(4410 및 4450)를 동시에 수행하거나 단계(4410 및 4450) 사이에서 교대할 수 있다.
방법(4400)은 단계(4440)의 성능을 안내하기 위해서 단계(4440)를 이용할 수 있다. 하나의 그러한 예에서, 단계(4420)에서 열전 냉각기(들)(220)에 의한 비-표적 조직(290)의 냉각은 단계(4440)에서 센서(230)에 의해 수행된 측정에 따라 조정된다. 본 발명의 범주를 벗어남이 없이, 단계(4420)는 예를 들어, 과-냉각을 방지 또는 보상하기 위해서 비-표적 조직을 가열하도록 열전 냉각기(들)를 역으로 진행시키는 단계를 포함할 수 있다.
단계(4410)는 국소 조직을 표적화하거나 표적 조직의 하나 이상의 국소 부분을 표적화하기 위해서 초음파를 빔포밍하는 단계(4414)를 포함할 수 있다. 단계(4414)의 일 예에서, CMUT 어레이(210)의 상이한 변환기에 대한 구동 신호는 서로에 대해 위상 편이되어, 예를 들어 도 8 내지 도 10을 참조하여 위에서 논의된 바와 같이 초음파(270)를 빔포밍한다. 단계(4410)는 단계(4450)에서 얻은 초음파 이미지에 의해 나타난 치료 효능에 따라서 단계(4414)에서 빔포밍을 수행할 수 있다. 예를 들어, 표적 조직(380)의 특정 부분이 더 많은 초음파 노출을 필요로 함을 단계(4450)에서 얻은 초음파 이미지가 나타내면, 단계(4414)는 표적 조직(380)의 이러한 특정 부분을 표적화하도록 초음파(270)를 빔포밍할 수 있다.
실시예에서, 단계(4410)는 표적 조직의 상이한 부분을 순차적으로 표적화하는 단계(4416)를 포함한다. 단계(4416)는 미리 정해진 스캔 패턴에 따라서 표적 조직을 체계적으로 스캔할 수 있거나, 단계(4416)는 단계(4450)에서 얻은 초음파 이미지에 의해 나타난 치료 효능에 따라서 표적 조직의 상이한 부분들을 순차적으로 표적화할 수 있다. 단계(4416)는 단계(4417 및 4418) 중 하나 또는 둘 모두를 포함할 수 있다. 단계(4417)는 CMUT 어레이를 다른 위치로 이동시킨다. 단계(4417)의 일 예에서, 작동기(3620)는 신체 채널(392)의 길이를 따라서 CMUT 어레이를 병진 운동시켜서 초음파(270)를 표적 조직(380)의 상이한 부분으로 순차적으로 지향시킨다. 단계(4417)의 다른 예에서, 작동기(3620)는 CMUT 어레이를 회전시켜 초음파(270)를 신체 채널(392)의 상이한 측에 위치된 표적 조직(380)의 상이한 부분으로 순차적으로 지향시킨다. 단계(4418)는 초음파를 빔포밍하여 표적 조직(380)의 상이한 부분을 순차적으로 표적화한다. 단계(4416)는 단계(4417 및 4418)을 함께 수행할 수 있다. 또한, 단계(4416)는 선택적으로 단계(4417 및/또는 4418)와 함께, CMUT 어레이의 상이한 CMUT 셀 또는 CMUT 요소를 순차적으로 활성화하여 표적 조직(380)의 상이한 부분을 순차적으로 표적화할 수 있다.
또한, 단계(4410)는 표적 조직을 다중 주파수 초음파에 노출시켜 국소화된 영역을 표적화하는 단계(4419)를 포함할 수 있다. 다중 주파수 초음파는 초음파를 국소화된 영역에 매우 정확하게 포커싱할 수 있는 능력을 가지며, 따라서 단계(4419)는 표적 조직이 암성 종양인 시나리오에서 특히 유용할 수 있으며, 이는 이웃의 건강한 조직의 상당한 양을 손상시킴이 없이 모든 암성 조직에서 괴사를 유도하는 것이 특히 중요하다. 단계(4410)의 일 예에서, CMUT 어레이(210)의 상이한 변환기는 상이한 주파수에서 구동된다.
선택적으로, 방법(4400)은 표적 조직을 포함한 더 큰 조직 영역을 단계(4410)에서의 표적 조직에 대한 표적 온도 미만의 온도로 가열하는 단계(4460)를 포함한다. 방법(4400)에서 단계(4460)의 포함은 표적 조직의 표적 온도에 도달하기 위해서 단계(4410)에서의 표적 조직으로 전달되어야 하는 초음파 에너지의 양을 감소시킬 수 있다. 따라서 단계(4460)는 단계(4410)의 지속 기간을 단축시킬 수 있고, 일부 시나리오에서 비-표적 조직에 대한 열-유도 손상의 위험을 감소시킬 수 있다. 단계(4460)의 일 예에서, 외부 열원은 표적 조직 근처의 대상자의 피부에 위치된다. 외부 열원은 유리하게, 단계(4410)의 CMUT 어레이에 가까운 위치로 비교적 많은 양의 열을 전달하는 외부 열원을 피하기 위해서, 단계(4410)에서의 초음파 노출 방향과 크게 상이한 방향으로부터 더 큰 조직 영역을 가열하도록 위치될 수 있다. 표적 조직이 전립선(192)에 있는 시나리오에서, 외부 히터는 전립선(192)의 전방에서 대상자(190)의 피부에 위치되어, 단계(4410)에서의 초음파 노출 방향과 실질적으로 반대 방향으로부터 더 큰 조직 영역을 가열할 수 있다. 단계(4460)의 다른 예에서, 대상자의 체온은 약물을 사용하여 상승된다. 또 다른 예에서, 단계(4460)는 단계(4410)의 CMUT 어레이를 덜 표적화된 방식으로 적용하여 표적 조직 주위의 더 큰 영역 및 표적 조직의 온도를 상승시킨다. 일 실시예에서, 단계(4460)는 단계(4410) 이전에, 단계(4410)를 시작하는 방법(4400) 이전에 더 큰 조직 영역의 온도를 상승시키기 위해 단계(4410) 이전에 수행된다. 다른 실시예에서, 단계(4460)는 단계(4410)의 초음파 치료 중 적어도 일부 동안 열을 더 큰 조직 영역으로 전달한다.
도 45는 요도(194)의 고체 상태 냉각기능으로 전립선(192)의 초음파 치료를위한 하나의 방법(4500)을 예시한다. 방법(4400)은 예를 들어, 카테터(110)에 의해 수행된다. 방법(4500)은 예를 들어, BPH 또는 전립선 암을 치료하기 위해서 전립선(192)의 초음파 치료에 특히 적합한 방법(4400)의 실시예이다.
방법(4500)은 각각, 단계(4410, 4420 및 4430)의 실시예인 단계(4510, 4520 및 4530)를 포함한다. 단계(4510)는 요도(194)를 통해 카테터에서 전립선(192)으로 전진된 CMUT 어레이에 의해 발생된 초음파에 전립선(192)을 노출시킨다. 단계(4520)는 하나 이상의 열전 냉각기를 사용하여 요도(194)의 벽을 냉각시켜(그리고 선택적으로, 요도(194)의 과냉각을 방지하거나 보상하기 위해 요도(194)의 벽을 가열하여) 요도(194)에 대한 열-유도 손상을 방지한다. 각각의 열전 냉각기는 CMUT 어레이 및/또는 카테터에 커플링된다. 단계(4530)는 열전 냉각기(들)로부터 및 요도(194)의 벽으로부터 열을 제거한다.
방법(4500)은 단계(4540, 4550 및/또는 4560)를 더 포함할 수 있다. 단계(4540)는 요도 벽(194)의 온도, 압력, 또는 온도와 압력 모두를 모니터링하는 단계(4440)의 실시예이다. 단계(4550)는 전립선(192)의 초음파 이미지를 얻는 단계(4450)의 실시예이다. 단계(4560)는 전립선(192) 주위의 더 큰 조직 영역을 가열하는 단계(4460)의 실시예이다.
단계(4510)는 단계(4512, 4412, 4514, 4516 및 4519)를 포함할 수 있다. 단계(4512)는 BPH 또는 전립선 암을 치료하기 위해서 조직 또는 전립선(192)의 괴사를 유도한다. 단계(4514)는 빔포밍을 사용하여 전립선(192) 내의 국소 영역을 표적화하는 단계(4414)의 실시예이다. 단계(4516)는 전립선(192)의 상이한 부분을 순차적으로 표적화하는 단계(4416)의 실시예이다. 단계(4516)는 단계(4417 및 4418) 중 하나 또는 모두를 포함할 수 있다. 단계(4510)는 전립선(192)의 조직을 다중 주파수 초음파에 노출시켜 암성 종양의 국소 영역을 표적화하는 단계(4419)의 실시예이다.
단계(4530)는 단계(4532)를 포함할 수 있다. 단계(4532)는 열전 냉각기(들)에 연결되고 요도 카테터를 통해 요도의 출구(194) 쪽으로 연장하는 고체 열 전도체를 통해 열전 냉각기(들)로부터 열을 전도하는 단계(4434)의 실시예이다. 단계(4532)는 단계(4534)를 포함할 수 있다. 단계(4534)는 요도(194) 외부의 고체 열 전도체를 냉각시키는 단계(4434)의 실시예이다.
도 46은 초음파 이미징 피드백을 이용한 초음파 치료를 위한 하나의 방법(4600)을 예시한다. 방법(4600)은 치료 제어기(3540)에 의해 수행될 수 있다. 방법(4600)은 치료 제어 명령(3940)의 적어도 일부분으로서 기계 판독 가능한 명령어(3930)로 인코딩될 수 있다. 각각의 방법(4400 및 4500)은 단계(4412)에서 방법(4600)을 구현할 수 있다. 방법(4600)에서 사용된 피드백은 표적 조직에 대한 초음파 클러터 신호와 초음파 치료 효능 사이의 미리 결정된 대응관계를 이용한다. 따라서, 방법(4600)은 후속 초음파 치료를 안내하기 위해서 실제 치료에 사용된 동일한 초음파 장치에 의해 기록된 초음파 이미지를 사용한다. 유리하게, 방법(4600)은 치료 진행을 모니터링하기 위해서 자기 공명 이미징을 요구하지 않는다.
클러터 신호와 치료 효능 사이의 미리 결정된 대응관계는 방법(4600)의 수행 이전의 임상 시험으로부터 얻어질 수 있다. 이들 시험에서, 환자 코호트(patient cohort)는 표적 조직, 예를 들어 전립선 조직의 초음파 치료를 받는다. 표적 조직에 대한 공간적으로 분해된 클러터 신호를 얻기 위해서, 적어도 각각의 환자의 초음파 치료의 말기에서 초음파 이미징이 수행된다. 일 구현예에서, 시험 초음파 치료는 교대 초음파 이미징 및 초음파 치료를 이용한다. 시험에서, 치료 효능은 생체 검사 또는 자기 공명 이미징과 같은 종래의 방법을 사용하여 결정된다. 치료 효능은 초음파 치료에 의해 유도된 모든 조직 변화가 발생한 후의 시점에서 결정될 수 있다. 조직의 괴사 정도 및 암성 조직이 파괴된 정도 각각은 치료 효능을 나타내는 매개변수로서 역할을 할 수 있다. 치료 효능은 공간적으로 분해된 방식으로 결정될 수 있다. 클러터 신호와 치료 효능의 비교는 클러터 신호와 치료 효능 사이의 대응관계를 초래한다. 이러한 대응관계는 치료될 조직의 유형에 의존할 수 있다. 예를 들어, 전립선 조직과 관련된 대응관계는 유방 조직과 관련된 대응관계와 상이할 수 있다. 또한, 대응관계는 표적 조직에서의 혈액 관류의 정도에 의존할 수 있다. 따라서, 특정 구현예에서, 단계(4620)에서 적용되는 미리 결정된 대응관계는 조직 유형 및 선택적으로 혈액 관류 정도에 특이적일 수 있다.
방법(4600)은 단계(4610 및 4620)를 포함한다. 단계(4610)는 초음파 변환기 어레이로부터 표적 조직의 초음파 이미지를 얻어 표적 조직에 대한 공간적으로 분해된 클러터 신호, 즉 표적 조직 내의 위치 함수로서의 클러터 신호를 결정한다. 단계(4620)는 클러터 신호와 치료 효능 사이의 미리 결정된 대응관계에 기초하여, 표적 조직을 치료하기 위해 초음파 변환기 어레이에 의한 후속 초음파 발생에 대한 하나 이상의 특성을 결정한다. 단계(4610)의 일 예에서, 치료 제어기(3540)는 공간적으로 분해된 클러터 신호를 포함하는 표적 조직(예를 들어, 전립선 조직)의 초음파 이미지를 수신하거나 표적 조직에 대한 공간적으로 분해된 클러터 신호를 결정하기 위해서 처리 제어기(3540)에 의해 처리될 수 있다. 단계(4620)의 일 예에서, 처리 제어기(3540)는 표적 조직을 치료하기 위해서, 단계(4610)에서 초음파 이미지를 기록하는데 사용된 동일한 초음파 변환기 어레이에 의해 후속 초음파 발생의 하나 이상의 특성을 결정하도록 클러터 신호와 치료 효능 사이의 미리 결정된 대응관계를 사용한다. 초음파 변환기 어레이는 CMUT 어레이(112)일 수 있다. 그러나, 본 발명의 범주를 벗어남이 없이, 초음파 변환기 어레이는 압전 초음파 변환기 어레이와 같은 다른 유형의 변환기 어레이일 수 있다.
방법(4600)은 초음파 치료 절차 동안 여러 번 수행될 수 있다. 일 구현예에서, 방법(4600)은 실시간 피드백을 제공한다.
단계(4620)는 순간 클러터 신호 및 클러터 신호와 치료 효능 사이의 미리 결정된 대응관계에 기초하여, 초음파 치료의 순간 효능을 추론하는 단계(4622)를 포함할 수 있다.
특정 실시예에서, 단계(4620)는 초음파 변환기 어레이에 의한 후속 초음파 처리 단계에서 발생될 공간적으로 분해된 초음파 세기를 결정하는 단계(4626)를 포함한다. 일 예에서, 단계(4626)는 클러터 신호와 단계(4610)에서 얻은 공간적으로 분해된 클러터 신호에 대한 치료 효능 사이의 미리 결정된 대응관계를 적용하여 어느 국소 영역이 다른 영역보다 더 많은 초음파 노출을 필요로 하는 지를 식별한다.
단계(4620)는 클러터 신호와 치료 효능 사이의 조직-유형 특이적 대응관계를 이용하는 단계(4628)를 포함할 수 있다. 일 예에서, 표적 조직은 전립선 조직이고 단계(4628)는 클러터 신호와 치료 효능 사이의 전립선-특이적 대응관계를 이용한다. 일 실시예에서, 단계(4628)는 단계(4629)를 포함하고 방법(4600)은 단계(4650 및 4652)를 더 포함한다. 단계(4629)는 클러터 신호와 치료 효능 사이의 조직-유형 특이적 대응관계를 선택된 혈액-관류 특이적 대응관계로부터 선택한다. 단계(4629)는 단계(4650 및 4652)가 선행된다. 단계(4650)는 초음파 변환기 어레이를 사용하여 얻은 표적 조직의 도플러 이미지를 수신한다. 단계(4652)는 도플러 이미지를 처리하여 표적 조직에서의 혈액 관류의 정도를 평가하고, 단계(4629)는 표적 조직에서의 혈액 관류의 정도와 가장 가깝게 관련되는 혈액-관류 특이적 대응관계를 선택한다.
실시예에서, 단계(4620)는 단계(4624)를 포함하고 방법(4600)은 단계(4612)더 포함한다. 단계(4612)는 예를 들어, 센서(들)(230) 또는 센서(들)(3120)를 사용하여 얻은, 초음파에 의해 가열된 비-표적 조직의 온도 및/또는 압력의 측정을 수신한다. 단계(4624)는 후속 초음파 노출의 하나 이상의 특성을 결정하기 위해서 비-표적 조직의 측정된 온도 및/또는 압력을 추가로 고려한다. 이러한 실시예에서, 방법(4600)은 온도 또는 압력이 대응하는 임계 값을 초과하는 경우에 초음파 노출을 적어도 일시적으로 중단하는 단계(4640)를 더 포함할 수 있다.
선택적으로, 방법(4600)은 단계(4620)에서 결정된 하나 이상의 특성을 갖는 초음파를 발생시키도록 초음파 변환기 어레이에게 명령하는 단계(4630)을 더 포함한다. 단계(4630)의 일 예에서, 치료 제어기(3540)는 단계(4620)에서 결정된 하나 이상의 특성을 갖는 초음파를 발생시키는 방식으로 CMUT 어레이(112/210)를 구동하도록 초음파 구동 회로(3512)에게 명령한다. 단계(4626 및 4630)을 모두 포함하는 방법(4600)의 실시예에서, 단계(4630)는 단계(4626)에서 결정된 공간적으로 분해된 세기로 초음파를 빔포밍하도록 초음파 변환기 어레이에게 명령하는 단계(4632)를 포함할 수 있다. 단계(4632)는 빔 포밍 유닛(5422)에 의해 수행될 수 있다.
본 발명의 범주를 벗어남이 없이, 치료 효능과 클러터 신호 사이의 미리 결정된 대응관계는 치료 효능과 도플러 신호 사이에서 유사하게 미리 결정된 대응관계로 대체될 수 있다. 예를 들어, 감소된 도플러 신호는 감소된 혈관화와 관련될 수 있으며, 이는 결국 완전한 치료를 나타낼 수 있다. 또한, 본 발명의 범주를 벗어남이 없이, 치료 효능과 클러터 신호 사이의 미리 결정된 대응관계는 클러터 신호와 도플러 신호의 조합과 치료 효능 사이의 미리 결정된 대응관계로 대체될 수 있다. 또한, (a) 치료 효능과 (b) 클러터 신호 및/또는 도플러 신호 사이의 미리 결정된 대응관계는 치료 효능과 신체 채널 벽에서의 온도, 신체 채널 벽에서의 압력, 초음파 방출 주파수 및 CMUT 어레이에 의해 전달된 열량(선택적으로, 공지된 에너지 손실에 대해 보정됨) 중 하나 이상과 같은 다른 측정 가능한 매개변수 사이의 미리 결정된 상관관계와 함께 사용될 수 있다. 임상 시험은 방법(4600)에서 사용하기 위한 치료 효능의 평가와 함께 그러한 매개변수를 고려하고 평가할 수 있다.
도 47은 초음파 이미징 피드백으로 초음파 치료를 제어하기 위한 하나의 시스템(4700)을 예시한다. 시스템(4700)은 시스템(3900)과 유사하지만 클러터 신호에 기초한 초음파 이미징 피드백에 특히 적합하다. 시스템(4700)은 프로세서(3910), 프로세서(3910)와 통신 가능하게 커플링된 메모리(4720), 및 프로세서(3910)와 통신 가능하게 커플링된 인터페이스(3990)를 포함하고, 또한 컴퓨터(4700)를 전자 회로(3510)와 통신 가능하게 커플링하도록 구성된다. 시스템(4700)은 방법(4600)을 수행하도록 구성되는 제어 모듈(3520)의 실시예이다.
메모리(4720)는 기계 판독 가능한 명령어(4730), 및 시스템(4700)이 방법(4600)의 단계(4610)를 수행할 때 인터페이스(3990)를 통해 시스템(4700)에 의해 수신된 클러터 신호 이미지(3982)를 포함하는 초음파 이미지(3980)를 저장하는 데이터 저장 장치(4760)를 포함하는 비-일시적 메모리이다. 데이터 저장 장치(4760)는 또한, 방법(4600)의 단계(4620)를 수행할 때 시스템(4700)에 의해 결정된 초음파 노출 특성(4770)을 저장한다. 초음파 노출 특성(4770)은 단계(4626)를 수행할 때 시스템(4700)에 의해 결정된 공간적으로 분해된 초음파 세기(4828)를 포함할 수 있다. 특정 실시예에서, 데이터 저장 장치(4760)는 시스템(4700)이 단계(4612)를 수행할 때 인터페이스(3990)를 통해 시스템(4700)에 의해 수신된 온도(3910) 및/또는 압력(3998)과 같은 센서 측정치(3970)를 저장한다. 데이터 저장 장치(4760)는 도플러 이미지(3984)(시스템(4700)이 단계(4650)를 수행할 때 인터페이스(3990)를 통해 시스템(4700)에 의해 수신됨) 및 밝기 이미지(3986) 중 하나 또는 모두를 추가로 저장할 수 있다.
기계-판독 가능한 명령어(4730)는 치료 제어 명령어(4744) 및 하나 이상의 클러터-신호 대 치료-효과-대응관계(4750)를 포함한다. 치료 제어 명령어(4740)는 치료 제어 명령어(3940)의 실시예이다. 프로세서(3910)에 의해 실행될 때, 치료 제어 명령어(4740)는 치료 효능 대응관계(4750)에 대한 적어도 하나의 클러터 신호를 이용하여 방법(4600)을 수행한다. 치료 제어 명령어(4740)는 프로세서(3910)에 의해 실행될 때, 클러터 신호 이미지(3982)를 평가하고 적어도 하나의 초음파 노출 특성(4770)을 결정하기 위해 적어도 하나의 클러터-신호 대 처리-효능 대응관계(4750)를 이용하는 클러터 신호 평가 명령어(4722)를 포함한다. 치료 제어 명령어(4744)는 온도/압력 평가 명령어(4744) 및/또는 대응관계 선택 명령어(4730)를 더 포함할 수 있다. 프로세서(3910)에 의해 실행될 때, 온도/압력 평가 명령어(4744)는 단계(4624) 및 선택적으로 단계(4640)를 수행한다. 기계 판독 가능한 명령어(4730)는 측정 명령어(3932), 및 선택적으로 임계 온도(3944)와 임계 압력(3936) 중 하나 또는 둘 모두를 포함할 수 있고, 단계(4624) 및 선택적으로 단계(4640)를 수행하기 위해 온도/압력 평가 명령어를 실행할 때 이들을 추가로 이용할 수 있다. 프로세서(3910)에 의해 실행될 때, 대응관계 선택 명령어(4746)는 단계(4628)를 수행한다.
실시예에서, 클러터-신호 대 치료 효능 대응관계(4750)는 복수의 혈액-관류 특이적 대응관계(4752)를 포함하고, 기계 판독 가능한 명령어(4730)는 혈액 관류 평가 명령어(4748)를 포함한다. 이러한 실시예에서, 프로세서(3910)는 혈액 관류 평가 명령(4748)을 실행하고, 데이터 저장장치(4760)로부터 도플러 이미지(3984)를 검색하고, 단계(4629)를 수행하기 위해 혈액 관류 특이적 대응관계(4752) 중 대응하는 것을 선택한다.
실시예에서, 기계 판독 가능한 명령어(4730)는 초음파 이미징 명령어(3950)를 포함한다. 프로세서(3910)는 단계(4630)를 수행하기 위해서 초음파 이미징 명령어(3950)를 실행할 수 있다. 치료 제어 명령어(4744)는 프로세서(3910)에 의해 실행될 때 단계(4322)를 수행하는 빔포밍 명령어(3942)을 더 포함할 수 있다.
본 발명의 범주를 벗어남이 없이, 시스템(4700)은 압전 변환기 어레이와 같은 CMUT와 상이한 유형의 초음파 변환기 어레이를 구동하는 수정된 버전의 전자 회로(3510)와 통신 가능하게 커플링되도록 구성될 수 있다.
도 48은 고체 상태 냉각기능으로 표적 조직의 초음파 치료를 위한 하나의 프로토콜(4800)을 예시한다. 방법(4400)은 프로토콜(4800)에 따라서 단계(4410, 4420, 4430, 4440 및 4450)를 수행할 수 있고, 방법(4500)은 프로토콜(4800)에 따라서 단계(4510, 4520, 4530, 4540 및 4550)를 수행할 수 있다.
단계(4810)에서, 프로토콜(4800)은 (a) 표적 조직의 초음파 치료 및 (b) 표적 조직을 포함하지만 선택적으로 비-표적 조직을 또한 포함하는 초음파 치료와 관련된 조직의 초음파 이미징을 개시한다. 초음파 치료 및 초음파 이미징은 신체 채널 내에 위치된 CMUT 어레이에 의해 신체 채널 내에서 수행된다. 단계(4810)의 일 예에서, 시스템(3900)의 제어 모듈(140)은 (a) 표적 조직(280)의 초음파 치료 및 (b) 표적 조직(280)(및 선택적으로 또한 비-표적 조직(290)과 같은 다른 조직)의 초음파 이미징을 개시하고, CMUT 어레이(210)는 신체 채널(392) 내에서 초음파 치료와 초음파 이미징을 모두 수행한다. 하나의 시나리오에서, 프로토콜(4800)은 CMUT 어레이의 단일 위치 및 방위로부터 다루어질 수 있는 표적 조직의 치료에 적용된다. 다른 시나리오에서, 프로토콜(4800)은 CMUT 어레이의 여러 상이한 위치 및/또는 방위가 모든 표적 조직을 치료하는데 사용되어야 하는 정도로 표적 조직의 치료에 적용된다. 이러한 시나리오에서, 단계(4810)에 의해 개시된 초음파 치료는 표적 조직의 일부를 치료한다. 그러나, 단계(4810)에 의해 개시된 초음파 이미징은 치료되는 것보다 표적 조직의 더 큰 부분을 이미징할 수 있음을 이해해야 한다.
프로토콜(4800)은 또한 단계(4820)를 포함한다. 단계(4820)는 하나 이상의 열전 냉각기를 사용하여 신체 채널의 벽을 냉각시키고, 고체 열 전도체를 사용하여 열전 냉각기(들)로부터 열을 추가로 제거한다. 단계(4820)는 단계(4420 및 4430)의 실시예이다. 단계(4820)의 일 예에서, 열전 냉각기(들)(220)는 벽(390)을 냉각시키고 고체 열 전도체(710)는 열전 냉각기(들)(220)로부터 열을 제거한다. 특정 실시예에서, 프로토콜(4800)은 CMUT 어레이에서 또는 CMUT 어레이 근처에서 신체 채널 벽의 온도 및/또는 압력을 모니터링하는 단계(4830)를 더 포함한다. 단계(4830)의 일 예에서, 센서(들)(230)는 벽(390)의 온도 및/또는 압력을 측정한다. 단계(4830)는 단계(4440)의 실시예이다. 단계(4820 및 4830)는 단계(4810)에 의해 개시된 초음파 치료 및 이미징과 병행하여 수행된다. 단계(4820)는 단계(4830)에서 얻은 측정치에 적어도 부분적으로 기초하여 수행될 수 있다. 본 발명의 범주를 벗어남이 없이, 단계(4820)는 신체 채널 벽의 과냉각을 방지하거나 보상하기 위해서 신체 채널 벽을 가열하기 위해 열전 냉각기(들)를 역으로 작동시킬 수 있다.
방법(4820)은 단계(4810)에 의해 개시된 초음파 치료 및 이미징이 활성화되는 동안 단계(4840)를 수행한다. 단계(4840)는 (a) 단계(4810)에 의해 개시된 초음파 이미징으로부터 그리고 선택적으로 단계(4830)를 포함하는 실시예에서 얻은 초음파 이미지, (b) 단계(4830)에서 얻은 벽 온도/압력 측정치를 평가한다. 이러한 평가에 기초하여, 단계(4840)는 단계(4810)에 의해 개시된 초음파 치료가 계속되어야 하는지 또는 중지되어야 하는 지의 여부를 결정한다.
결정 단계(4842)에서, 단계(4840)는 CMUT 어레이에 의해 현재 치료되고 있는 표적 조직의 초음파 치료가 완료되었는지를 결정한다. 그렇다면, 프로토콜(4800)은 단계(4810)에 의해 개시된 초음파 치료(및 선택적으로 또한 초음파 이미징)를 중단하고 초음파 치료가 완료된 것으로 표시하는 단계(4850)로 진행한다. 하나의 시나리오에서, 단계(4842)는 하나 이상의 초음파 이미지로부터 얻은 정보(예를 들어, 도 46 및 도 47을 참조하여 위에서 논의된 클러터 신호)에 기초하여 현재 치료되고 있는 표적 조직의 초음파 치료가 완료되었는지를 결정한다. 다른 시나리오에서, 단계(4842)는 단계(4830)로부터 얻은 하나 이상의 온도 및/또는 압력 측정치에 기초하여 현재 치료되고 있는 표적 조직의 초음파 치료가 완료되었는지를 결정한다. 이러한 후자의 시나리오에서, 단계(4840)는 표적 조직의 온도를 결정하기 위해서 열 모델을 사용하여 온도/압력 값(들)을 표적 조직에 역-투영한다. 또 다른 예에서, 단계(4842)는 초음파 이미지 및 온도/압력 측정치의 조합을 이용하여 초음파 치료가 완료되었는지를 결정한다.
단계(4830 및 4840)를 포함하는 프로토콜(4800)의 실시예는 신체 채널 벽의 온도 또는 압력이 임계 값에 도달했는지를 결정하는 결정 단계(4844)를 더 포함할 수 있으며, 초과 임계 값에서는 신체 채널 벽에 대한 손상이 발생할 가능성이 있다. 그러한 임계 값에 도달하면, 프로토콜(4800)은 단계(4810)에 의해 개시된 초음파 치료(및 선택적으로 또한 초음파 이미징)를 중단시키는 단계(4860)로 진행한다. 치료가 아직 완료되지 않았으면(단계(4842)에 의해 결정됨), 단계(4860)는 치료가 완료되지 않은 것으로 표시할 수 있고, 프로토콜(4800)은 나중에 이러한 표적 조직의 초음파 치료를 계속할 수 있다. 일 구현예에서, 프로토콜(4800)은 치료의 후 단계에서 단계(4844)를 더 활용하기 전에 초기 치료 단계에서 단계(4842)에 의존한다.
단계(4840, 4850 및 4860)는 제어 모듈(140) 또는 시스템(3900)에 의해 수행될 수 있다.
프로토콜(4800)은 단계(4810) 이전에, CMUT 어레이를 위치시켜 표적 조직 또는 표적 조직의 특정 부분을 노출시키는 단계(4802)를 포함할 수 있다. 단계(4802)는 신체 채널 내에서 CMUT 어레이의 방위를 조정하는 것 및/또는 CMUT 어레이가 신체 채널로 얼마나 멀리 삽입되는지를 조정하는 것을 포함할 수 있다.
표적 조직의 범위는 모든 표적 조직이 CMUT 어레이의 단일의 고정 위치/방위로부터 도달될 수 없는 정도인 시나리오에서, 단계(4810)는 표적 조직의 일부분의 치료를 개시한다. 그러한 시나리오에서, 단계(4850 및 4860)는 프로토콜(4800)이 단계(4810)로 복귀하여 표적 조직의 다른 부분의 초음파 치료를 개시하기 전에, 표적 조직의 다른 부분을 표적화하도록 CMUT 어레이를 재-위치시키는 단계(4870)가 이어질 수 있다. 프로토콜(4800)은 모든 표적 조직을 치료하기 위해 그러한 반복을 여러 번 수행할 수 있다. 그러한 시나리오의 일 예에서, 프로토콜(4800)은 전립선(192)의 초음파 치료, 예를 들어 BPH의 치료에 적용된다. 이러한 예에서, 프로토콜(4800)은 단계(4810, 4840, 4850, 4860 및 4870)의 여러 반복을 포함하며, 여기서 각각의 반복은 요도(194)에 대해 본질적으로 360도에서 초음파 치료를 수행하기 위해서 요도(194)에서 CMUT 어레이의 상이한 방위와 관련된다.
프로토콜(4800)의 일 구현예에서, 단계(4802 및 4870)는 조작자에 의해 수동으로 수행된다. 조작자는 CMUT 어레이(112)(또는 210)의 개별 위치/방향을 한정하는 핸들(120) 또는 카테터(110)의 실시예를 이용할 수 있다. 프로토콜(4800)의 다른 구현예에서, 단계(4802 및 4870)는 제어 모듈(140) 또는 시스템(3900) 및 핸들(120) 또는 카테터(110)의 전동화된 실시예를 사용하여 자동으로 수행된다.
프로토콜(4800)의 특정 실시예는 치료 제어 명령어(3940 및 4740) 중 하나로 인코딩될 수 있다.
도 49는 CMUT 어레이의 여러 상이한 위치/방위를 요구하는 정도로 표적 조직의 치료를 관리하기 위해서 프로토콜(4800)과 함께 이용될 수 있는 하나의 그래픽 사용자 인터페이스(4900)를 예시한다. 사용자 인터페이스(4900)는 제어 모듈(140)에서 구현되거나, 시스템(3900) 및 시스템(3900)과 통신 가능하게 커플링된 디스플레이에서 협력적으로 구현될 수 있다.
사용자 인터페이스(4900)는 표적 조직의 각각의 부분의 치료 상태를 시각적으로 나타내는 치료 진행 표시기(4910)를 포함한다. 표적 조직의 각각의 부분은 치료 진행 표시기(4910)의 세그먼트(670)에 의해 표현된다. 색상, 음영, 텍스트 또는 다른 시각적 마커(visual marker)는 이러한 세그먼트(670)의 처리 상태를 나타내기 위해서 각각의 세그먼트(670)에 적용된다. 가능한 상태의 유형에는 현재 치료 중, 치료 완료, 치료 미완료 및 아직 치료에 노출되지 않음을 포함한다. 도 49에 도시된 예에서, 하나의 세그먼트(670)는 활성 상태(라벨(4922))에 있으며, 활성 상태는 이러한 세그먼트(670)가 현재 프로토콜(4800)의 단계(4810)에 의해 개시된 초음파 치료에 노출됨을 나타낸다. 여러 다른 세그먼트(4912)가 치료되어 치료가 완료되었다(라벨(4924)). 하나의 세그먼트(670)가 치료되었지만 치료는 완료되지 않았다(라벨(4926)). 나머지 세그먼트(4912)는 아직 치료에 노출되지 않았다(라벨(4928) 및 도 49에서 음영이 없는 모든 세그먼트(4912)). 예시의 명확성을 위해서, 모든 세그먼트(4912, 4924, 4926 및 4928)가 도 49에 표시되지 않았다.
도 49에 도시된 치료 진행 표시기(4910)의 특정 예는 외부로부터 내부 쪽으로 치료하면서, 예를 들어 전립선(192)의 360도 치료를 수행하기 위해서 CMUT 어레이가 여러 상이한 방위로 배치되어야 하는 시나리오와 관련된다. 특정 시나리오에서, CMUT 어레이의 임의의 주어진 방위에서, 안쪽으로 작업하기 전에 초음파가 가장 먼 세그먼트에 먼저 집중될 때 치료가 가장 효과적일 수 있다. 이는 초음파가 표적 세그먼트에 도달하기 전에 상당한 괴사를 갖는 조직을 통과할 필요가 없도록 보장하며; 괴사는 초음파 전파 특성에 악영향을 줄 수 있다. 도 49에 도시된 예에서, 각각의 세그먼트(670)는 CMUT 어레이의 각각의 방위 및 초음파가 집중되는 반경 거리에 대응한다. 본 발명의 범주를 벗어남이 없이, 치료 진행 표시기(4910)는 CMUT 어레이의 회전보다는 또는 CMUT 어레이의 회전과 함께 CMUT 어레이의 병진운동을 표시하도록 조정될 수 있다. 또한, 본 발명의 범주를 벗어남이 없이, 치료 진행 표시기(4910)는 도 49에 도시된 것보다 많거나 적은 세그먼트(4912), 예를 들어 반경 방향 거리가 아닌 방위에 따르는 세그먼트만을 포함할 수 있다. 사용자 인터페이스(4900)는 (a) CMUT 어레이의 위치/방위를 감지하는 핸들(120) 또는 카테터(110)의 실시예 및 (b) 초음파의 반경 방향 초점 거리와 함께 감지된 위치/방위를 처리하는 컴퓨터(예컨대, 제어 모듈(140) 또는 시스템(3900))와 함께 사용될 수 있다. 조작자가 CMUT 어레이의 방위/위치를 수동으로 제어할 때, 사용자 인터페이스(4900)는 세그먼트(들)(4912)가 치료 또는 추가 치료를 필요로 하는지 및 세그먼트(4912)가 추가 치료를 받지 않아야 하는지에 대한 정보를 조작자에게 제공한다. CMUT 어레이의 재-위치설정/포커싱이 자동으로 수행될 때, 예를 들어 제어 모듈(140) 또는 시스템(3900)에 의해 제어될 때, 사용자 인터페이스(4900)는 치료의 진행을 나타낸다. 사용자 인터페이스(4900)와 관련된 소프트웨어는 반경 방향으로 더 바깥쪽 세그먼트(4912)의 치료 전에 반경 방향으로 더 안쪽 세그먼트(4912)의 치료를 방지하도록 구성될 수 있다.
특정 실시예에서, 사용자 인터페이스(4900)는 예를 들어, CMUT 어레이를 수동으로 재-위치설정/재-포커싱할 시간이거나 CMUT 어레이가 부정확하게 위치된 경우에 조작자에게 경고를 표시하는 경고 표시기(4930)를 포함한다.
도 50은 고체 상태 냉각기능을 갖는 CMUT 어레이를 제작하기 위한 하나의 방법(5000)을 예시하며, 여기서 CMUT 어레이는 열전 냉각기에 직접 제작된다. 방법(5000)은 CMUT-TEC 장치(1200)를 제작하는데 사용될 수 있다. 방법(5000)은 또한, 예를 들어 CMUT-TEC 장치(500)에서와 같이 열전 냉각기(220)와 직접 물리적으로 접촉하는 CMUT 어레이(210)를 갖는 CMUT-TEC 장치(200)의 실시예를 제작하는데 사용될 수 있다.
방법(5000)은 단계(5010 및 5020)를 포함한다. 단계(5010)는 2 개의 열 전도체를 포함하고, 2 개의 열 전도체, 복수의 n-형 반도체 및 전기적으로 직렬로 커플링되는 복수의 p-형 반도체 사이에 배치된 열전 냉각기를 수용하며, 직렬 커플링은 n-형 반도체와 p-형 반도체 사이에서 교대한다. 단계(5020)은 열전 냉각기의 열 전도체 중 하나에 CMUT 어레이를 제작한다. 방법(5000)의 일 예에서, 단계(5010)는 열전 냉각기(1210)를 수용하고, 단계(5020)는 열전 냉각기(1210)의 열 전도체(1242)에 CMUT 어레이(210)를 제작한다.
방법(5000)은 미세기계가공 공정을 사용하여 기판으로부터 열전 냉각기를 제조하는 단계(5002)를 단계(5010) 이전에 더 포함할 수 있다. 또한, 단계(5020)는 미세기계가공 공정을 사용하여 CMUT 어레이를 제작하는 단계(5022)를 구현할 수 있다.
실시예에서, 단계(5020)는 단계(5030, 5032, 5034 및 5036)를 포함한다. 단계(5030)는 (아직 완료되지 않은)CMUT 어레이의 복수의 제 1 전극을 열전 냉각기의 두 열 전도체 중 첫 번째 전극에 증착한다. 단계(5032)는 제 1 열 전도체에 전기 절연 층을 형성한다. 전기 절연 층은 제 1 전극을 덮고 복수의 진공 공동을 가진다. 각각의 진공 공동은 CMUT 어레이의 각각의 변환기에 대응하고 제 1 전극 중 각각의 하나 위에 위치된다. 단계(5034)는 CMUT 어레이의 복수의 제 2 전극을 전기 절연 층에 증착한다. 각각의 제 2 전극은 진공 공동의 각각의 하나 위에 위치된다. 단계(5036)는 제 2 전극 위에 보호 층을 증착한다. 보호 층은 전기 절연성일 수 있다.
본 발명의 범주를 벗어남이 없이, 단계(5010 및 5020)(및 선택적으로 단계(5002))는 제 2 열 전도체가 아직 장착되지 않은 열전 냉각기로 수행될 수 있다. 이러한 제 2 열 전도체는 이후 단계에서 형성될 수 있거나, 초음파 변환기 어레이는 제 2 열 전도체로서 역할을 하는 열 전도체에 장착될 수 있다. 또한, 본 발명의 범주를 벗어남이 없이, CMUT 어레이와 반대쪽을 향하는 열전 냉각기 측의 p-형 반도체와 n-형 반도체 사이의 전극은 단계(5020) 후에 형성될 수 있다.
열전 냉각기(114 또는 220)와 같은 본 개시의 열전 냉각기는 본 기술 분야에 공지된 압전 초음파 변환기 및 초음파 변환기와 같은 비-CMUT 유형의 초음파 변환기와 함께 사용하도록 확장될 수 있는 것으로 이해된다. 현재 개시된 열전 냉각기는 초음파 변환기를 냉각시키기 위해 그러한 초음파 변환기에 열적으로 커플링될 수 있고, 열전 냉각기(들)에 의해 취득된 열은 고체 열 전도체(710)와 같은 열 전도체에 의해 제거될 수 있다. 압전 초음파 변환기는 종종, 압전 변환기의 과열을 피하기 위해서 최대 용량 미만으로 작동된다. 본 개시의 열전 냉각기 중 하나 이상은 압전 변환기 또는 압전 변환기 어레이에 열적으로 커플링될 수 있고, 압전 변환기(들)의 최대 용량에 가까운 초음파 발생을 허용하는데 충분한 냉각을 제공할 수 있다.
도 51은 수동 냉각기능을 갖춘 하나의 의료 CMUT 장치(5100)를 예시한다. CMUT 장치(5100)는 CMUT 어레이(210) 및 고체 열 전도체(1720)를 포함한다. CMUT 장치(5100)는 CMUT 어레이(210)를 통해 비-표적 조직(290)을 능동적으로 냉각시키기 위해 열전 냉각기(220)를 이용하는 대신, CMUT 어레이(210)를 통해 비-표적 조직(290)을 수동적으로 냉각하기 위해 고체 열 전도체(1720)를 이용하는 장치(700)의 변형예이다. 고체 열 전도체(1720)는 CMUT 어레이(210)와의 열 커플링(480) 내에 있다. CMUT 장치(5100)는 열 교환기(1730)와 협력하도록 구성된다. 작동 시, 비-표적 조직(290)의 냉각이 필요할 때, 열 교환기(1730)는 고체 열 전도체(1720)를 냉각시켜 CMUT 어레이(210)를 통해 비-표적 조직(290)으로부터 열을 제거한다. 예를 들어, CMUT 장치(5100)가 카테터(5160)에서 구현될 때, 고체 열 전도체(1720)는 카테터(5160)의 근위 단부(신체 채널 외부)에 커플링되는 핸들까지 연장하고 열 교환기(1730)를 포함한다. CMUT 장치(5100)는 예를 들어, 카테터(5160) 및 핸들에 각각 포함된 열 교환기(1730)와 함께 제공될 수 있다. 대안적으로, CMUT 장치(5100) 또는 카테터(5160)는 제삼자에 의해 제공된 열 교환기(1730)와 커플링하도록 구성된 독립형 장치로서 제공될 수 있다.
특정 실시예에서, 카테터(5160)는 히터(5130)를 포함한다. 히터(5130)는 예를 들어, 저항 히터이다. 특정 치료 시나리오에서, 고체 열 전도체(1720)에 의한 비-표적 조직(290)의 수동 냉각은 CMUT 어레이(210)가 꺼질 때 환자에게 불편하거나 손상을 주는 온도로 고체 열 전도체(1720)를 냉각시켜야 하며 따라서 비-표적 조직(290)을 가열하지 않는다. 고체 열 전도체(1720)가 CMUT 어레이(210)와 항상 열 커플링(480) 상태에 있고 열 전도체(1720)의 열 질량이 고체 열 전도체(1720)의 순간 가열을 방지하므로, 초음파 유도된 비-표적 조직(290)의 가열이 소산되는 것만큼 신속하게 고체 열 전도체에 의한 냉각을 끄는 것이 불가능할 수 있다. 따라서, CMUT 어레이(210)가 꺼질 때, 비-표적 조직(290)은 고체 열 전도체(1720)에 의해 과-냉각될 수 있다. 유사하게, CMUT 어레이(210)가 켜질 때 고체 열 전도체(1720)가 비-표적 조직(290)을 충분히 냉각시키는 것을 보장하도록 CMUT 어레이(210)를 켜기 전에 얼마 동안 고체 열 전도체(1720)의 냉각을 적어도 시작해야 할 필요가 있다. 이러한 사전 냉각 단계 동안, 고체 열 전도체(1720)는 비-표적 조직(290)을 과-냉각할 수 있다. 히터(5130)는 낮은 열 질량으로 구성되므로, 고체 열 전도체(1720)의 것보다 더 빠른 시간규모로 온도 제어를 제공한다.
CMUT 장치(5100)가 쉽고 빠른 온도 제어와 같은 열전 냉각의 특정 장점으로부터 이득을 얻지 못하지만, CMUT 장치(5100)는 (다른 근처의 신체 채널과 대조적으로)치료 부위에 직접적으로 냉각을 제공한다. CMUT 장치(5100)는 또한, 액체 냉각 카테터 팁에 비해 이점을 가진다. 특히, CMUT 장치(5100)는 액체 냉각제를 신체 채널에 도입할 필요없이 수동 냉각을 수행한다. 따라서, 환자를 직접 노출시키기 위해 카테터(5160)로부터 액체 냉각제의 누출 위험이 없으며, 카테터 CMUT 장치(5100)/카테터(5160)는 환자에게 액체 냉각제의 도입에 대한 규제 승인을 요구하지 않는다.
실시예에서, CMUT 장치(5100)는 도 2를 참조하여 위에서 논의된 바와 같이 렌즈(510)를 포함한다. CMUT 장치(5100)는 또한, 도 2를 참조하여 위에서 논의된 바와 같이 하나 이상의 센서(들)(230)를 포함할 수 있다.
본 발명의 범주를 벗어남이 없이, CMUT 장치(5100)는 카테터(1700, 1800, 1900), 관형 카테터 재킷(2300), 카테터(2550, 2650) 및 장치(3700, 3800)에서 CMUT-TEC 장치(200) 및 고체 열 전도체(1720)를 대신하여 구현될 수 있다. 또한, 본 발명의 범주를 벗어남이 없이, CMUT 장치(5100)는 시스템(4000, 4100, 4200 및 4300)에서 구현될 수 있다.
도 52는 히터를 포함하는 CMUT 장치(5100)의 하나의 구성(5200)의 분해도이다. 구성(5200)은 로드 섹션(rod section)(5218) 및 평탄화 섹션(5212)을 갖는 고체 열 전도체(5220)로서 고체 열 전도체(1720)를 구현한다. 일 실시예에서, 로드 섹션(5218) 및 평탄화 섹션(5212)은 일체로 형성된 고체 조각의 일부이다. 평탄화 섹션(5212)은 최상부 표면(5214) 및 바닥 표면(5216)을 가진다. CMUT 어레이(210) 및 렌즈(510)는 최상부 표면(5214)에 배치되고, 저항 히터(5230)는 바닥 표면(5216)에 커플링된다. 저항 히터(5230)는 히터(5130)의 실시예이다.
도 53은 히터를 포함하는 CMUT 장치(5100)의 다른 구성(5300)의 분해도이다. 구성(5300)은 로드 섹션(5218) 및 적어도 부분적으로 평탄화 섹션(5312)을 갖는 고체 열 전도체(5320)로서 고체 열 전도체(1720)를 구현한다. 일 실시예에서, 로드 섹션(5218) 및 평탄화 섹션(5312)은 일체로 형성된 고체 조각의 일부이다. 평탄화 섹션(5312)은 최상부 표면(5314)을 가진다. CMUT 어레이(210) 및 렌즈(510)는 최상부 표면(5314)에 배치되고, 저항 히터(5330)는 평탄화 섹션(5312) 근처의 로드 섹션(5218) 주위에 감긴다. 저항 히터(5330)는 히터(5130)의 실시예이다.
도 54는 히터를 포함하는 CMUT 장치(5100)의 또 다른 구성(5400)의 분해도이다. 구성(5400)은 고체 열 전도체(5320)로서 고체 열 전도체(1720)를 구현한다. CMUT 어레이(210) 및 렌즈(510)는 최상부 표면(5314)에 배치되고, 저항 히터(5430)는 최상부 표면(5314)과 CMUT 어레이(210) 사이의 계면에서 평탄화 섹션(5312)에 배치된다. 일 구현예에서, 저항 히터(5430)는 최상부 표면(5314)과 CMUT 어레이(210) 사이에서 열 접착제에 내장된 와이어이다. 저항 히터(5430)는 히터(5130)의 실시예이다.
도 55는 수동 냉각기능으로 초음파 치료를 위한 하나의 시스템(5500)을 예시한다. 시스템(5500)은 열전 냉각기(220)에 의한 능동 냉각 대신에 고체 열 전도체(1720)에 의한 수동 냉각을 위해 구성되는 것 외에는 시스템(3500)과 유사하다. 시스템(5500)은 (전자 회로(3510) 대신)전자 회로(5510) 및 선택적으로 핸들(3560)에 함께 장착된 열 교환기(1730)를 포함한다. 전자 회로(5510) 및 열 교환기(1730)는 카테터(5160)와 협력하도록 구성된다. 전자 회로(5510)는 펠티어 구동 회로(3514)를 포함하지 않는 전자 회로(3510)의 적응이다. 전자 회로(5510)는 전자 회로(5510)가 히터(5130)를 포함하는 카테터(5160)의 실시예와 커플링될 때 히터(5130)를 구동하기 위한 가열 회로(5530)를 포함할 수 있다. 시스템(5500)의 실시예에서, 치료 제어기(3540)는 가열 회로(5530)(포함될 때)를 제어하고/하거나 열 교환기(1730)를 적어도 부분적으로 제어하도록 구성된다. 이러한 실시예에서, 치료 제어기(3540)는 센서(들)(230)(포함될 때)로부터 얻은 측정치에 기초하여 가열 회로(5530)(포함될 때) 및/또는 열 교환기(1730)를 제어하기 위해서 측정 유닛(3532)과 협력할 수 있다.
도 56은 수동 냉각기능으로 초음파 치료를 위한 하나의 방법(5600)을 예시한다. 방법(5600)은 예를 들어, 카테터(5160) 및 열 교환기(1730)에 의해 수행된다. 방법(5600)의 성능은 전자 회로(5510)를 이용하는 치료 제어기(3540)에 의해 명령을 받을 수 있다. 방법(5600)의 특정 실시예는 치료 제어 명령어(3940)로서 기계 판독 가능한 명령어(3930)로 인코딩될 수 있다. 방법(5600)의 다른 실시예는 측정 명령어(3932) 및 초음파 이미징 명령어(3950) 중 하나 또는 둘 모두와 조합하여 치료 제어 명령어(3940)로서 기계 판독 가능한 명령어(3930)로 인코딩될 수 있다.
방법(5600)은 단계(4420 및 4430)가 단계(5620)로 대체된 것을 제외하면 방법(4400)과 유사하다. 단계(5620)는 비-표적 조직으로부터 열을 제거한다. 단계(5620)는 비-표적 조직으로부터 고체 열 전도체를 통해 신체 채널 외부의 열 교환기로 열을 전도하는 단계(5622)를 포함한다. 단계(5620 및 5622)의 일 예에서, 열 교환기(1730)는 카테터(5160)의 고체 열 전도체(1720)를 냉각시켜서, 고체 열 전도체(1720)가 CMUT 어레이(210)를 통해 비-표적 조직(290)으로부터 열을 제거한다. 열 교환기(1730)는 예를 들어, 액체 질소, - 30 ℃로 냉각된 부동액, 0도 부근의 냉각수, 또는 실온의 물에 의한 고체 열 전도체(1720)의 액체 냉각을 이용할 수 있다. 단계(5620)는 과도한 냉각을 방지할 필요에 따라서, 카테터 팁 및 그에 따른 비-표적 조직을 가열하는 단계(5624)를 포함할 수 있다. 단계(5624)의 일 예에서, 히터(5130)는 고체 열 전도체(1720)에 의한 비-표적 조직(290)의 과-냉각을 방지하거나 과-냉각을 보상하기 위해서 비-표적 조직(290)을 가열하도록 카테터(5160)의 팁의 적어도 일부분을 가열한다.
도 57은 요도(194)의 수동 냉각으로 전립선(192)의 초음파 치료를 위한 하나의 방법(5700)을 예시한다. 방법(5700)은 예를 들어, 카테터(5160) 및 열 교환기(1730)에 의해 수행된다. 방법(5700)은 예를 들어, BPH 또는 전립선 암을 치료하기 위해서 전립선(192)의 초음파 치료에 특히 적합한 방법(5600)의 실시예이다.
방법(5700)은 각각 단계(4410 및 5620)의 실시예인 단계(4510 및 5720)를 포함한다. 단계(4510)는 도 45를 참조하여 위에서 논의되었다. 단계(5720)는 요도(194)의 벽으로부터 열을 제거한다. 단계(5720)는 요도(194)의 벽으로부터 고체 열 전도체를 통해 요도(194) 외부의 열 교환기로 열을 전도하는 단계(5722)를 포함한다. 단계(5720)는 과도한 냉각을 방지하는데 필요한 바와 같이, 카테터 팁 및 그에 따른 요도(194)의 벽을 가열하는 단계(5724)를 포함할 수 있다. 단계(5722 및 5724)는 각각 단계(5622 및 5624)의 실시예이다.
방법(5700)은 도 46을 참조하여 위에서 논의된 바와 같이, 단계(4540, 4550 및/또는 4560)을 더 포함할 수 있다.
본 발명의 범주를 벗어남이 없이, 각각의 방법(5600 및 5700)은 단계(4412)에서 방법(4600)을 구현할 수 있다. 또한, 본 발명의 범주를 벗어남이 없이, 각각의 방법(5600 및 5700)은 프로토콜(4800)에 따라서 수행될 수 있다.
예 I:
CMUT
-
TEC
장치의 냉각 성능
모델링
장치(700) 및 인접 조직의 실시예의 열적 특성은 전기 회로 모델 및 소프트웨어 SPICE(통합 회로 강조를 갖춘 시뮬레이션 프로그램(Simulation Program with Integrated Circuit Emphasis))를 사용하여 평가되었다. 이 모델은 열 전도 및 전기 전도가 유사한 물리 법칙에 의해 지배된다는 사실의 장점을 취한다. 모델은 (a) 장치(700)가 렌즈(510)를 포함하고, (b) 고체 열 전도체(710)가 열 교환기(1730)와 같은 열교환기에 커플링되고, (c) 고체 열 전도체(710)가 스테인리스 스틸 카테터 재킷에 수용된다고 가정한다. 모델은 인접한 조직과 렌즈(510) 모두의 초음파 가열을 고려하고, 열전 냉각기에 의해 발생 된 열을 추가로 고려한다. 모델은 고체 열 전도체, 열 교환기, 스테인리스 스틸 카테터 재킷, 열전 냉각기, CMUT, 렌즈 및 조직 사이의 열 커플링을 설명한다.
이러한 예에서, 고체 열 전도체(710)는 고체 열 전도체(5320)와 유사한 방식으로 형상화된 구리 로드이며, 로드 섹션(5218)은 길이가 20 cm이고 직경이 3.2 mm이며, 평탄화 섹션(5312)은 길이가 2.5 cm이다. (히터(5330)는 모델에 포함되지 않는다.) 6 개의 열전 냉각기(Marlow, NL1020T)가 열 에폭시를 사용하여 최상부 표면(5314)에 나란히 부착되고 병렬로 실행되며, CMUT는 최상부 표면(5314)으로부터 멀어지는 쪽을 향하는 열전 냉각기 측에 부착된다. CMUT 활성 구역은 3.4 mm x 25.6 mm이다. 각각의 열전 냉각기는 대략 3.4 mm x 3.4 mm의 구역을 커버하며 1.6 mm의 두께를 가진다. 스테인리스 스틸 카테터 재킷의 내경은 4 mm, 외경은 5 mm, 길이는 20 cm이다. 스테인리스 스틸 카테터 재킷은 로드 섹션(5218)을 수용한다. CMUT는 전원이 켜질 때 10 와트의 초음파를 발생한다. 전원을 켤 때, 각각의 열전 냉각기는 최적의 냉각 성능을 제공하는 것으로 밝혀진 0.3 A의 전류로 구동된다.
렌즈-조직 계면에서의 온도는 CMUT 및 열전 냉각기를 켠 후 시간의 함수로서 모델링된다. 열 교환기의 냉각 저장소의 상이한 온도와 렌즈(510)의 두 가지 상이한 재료(Silgard 160 및 RTV-615)에 대한 계산이 수행된다. 표 1은 가열시 렌즈-조직 계면에서 정상 상태 온도(섭씨)를 열거하고 냉각은 평형상태에 도달했다. 표 2는 고체 열 전도체와 스테인리스 스틸 카테터 재킷 사이의 단열 유무에 관계없이 렌즈 조직 계면에서 가열 또는 냉각이 관여되지 않은 정상 상태 온도로부터 41도까지의 상승 시간(초)을 나타낸다.
| 냉각 저장소 온도 | 정상-상태 온도 | |
| Sylgard 160 | RTV-615 | |
| -186 ℃ | 55 °C | 33 °C |
| -30 ℃ | 67 °C | 44 °C |
| 0 ℃ | 69 °C | 46 °C |
| 24 ℃ | 71 °C | 48 °C |
| 냉각 저장소 온도 | 41 ℃로의 상승-시간 | |||
| Sylgard 160 | RTV-615 | |||
| 단열되지 않음 | 단열됨 | 단열되지 않음 | 단열됨 | |
| -186 ℃ | 31.3 초 | 98.5 초 | ∞ | ∞ |
| -30 ℃ | 4.7 초 | 8.2 초 | 78.2 초 | 147 초 |
| 0 ℃ | 2.7 초 | 3.7 초 | 48.0 초 | 63.0 초 |
| 24 ℃ | 1.5 초 | 1.5 초 | 32.3 초 | 34.1 초 |
표 1 및 표 2에 열거된 결과는 냉각 저장소 온도가 낮을 때 냉각이 가장 효과적이며, Sylgard 160과 비교하여 감소된 RTV-615의 초음파 감쇠가 렌즈-조직 계면에서 더 낮은 정상 상태 온도뿐만 아니라 41 ℃까지 더 긴 상승 시간를 초래한다는 것을 입증한다. 하나의 치료 시나리오에서, CMUT의 온-타임은 렌즈-조직 계면에서의 온도가 42 ℃를 초과하는 것을 방지하기 위해서 표 2에 열거된 대응하는 상승 시간으로 제한된다. 렌즈-조직 계면에서의 온도가 원하는 양만큼 하강될 때 치료가 재개될 수 있다. 이러한 냉각을 가속화하기 위해서 열전 냉각기가 남아있을 수 있다.
표적 조직의 가열은 바이오-열 전달 방정식을 사용하여 시뮬레이션되었다. 이러한 시뮬레이션은 괴사 조직의 부피가 초음파 노출 시간의 비선형 함수라는 것을 보여준다. 일 예에서, 2 초의 노출은 약 2.5 mm3의 조직 부피의 괴사를 야기하지만, 추가적인 2 초의 노출은 거의 10 mm3의 추가 조직 부피의 괴사를 야기한다. 따라서, 냉각이 최대 상한 온도까지 긴 상승 시간(표 2 참조) 동한 제공될 때 초음파 치료가 훨씬 더 효과적일 수 있다.
예 II: 수동 냉각된
CMUT
장치의 냉각 성능
모델링
CMUT 장치(5100) 및 인접 조직의 실시예의 열적 특성은 열전 냉각기가 없는 것을 제외하면 예 I에서 위에서 논의된 것과 유사한 방식으로, 전기 회로 모델 및 소프트웨어 SPICE(통합 회로 강조를 갖춘 시뮬레이션 프로그램)를 사용하여 평가되었다. 표 3은 고체 열 전도체와 스테인리스 스틸 카테터 재킷 사이의 단열 유무와 무관하게, 가열 및 냉각이 평형상태에 도달할 때 렌즈-조직 계면에서 정상 상태 온도(섭씨 온도)를 열거한다. 표 4는 고체 열 전도체와 스테인리스 스틸 카테터 재킷 사이의 단열 유무와 무관하게, 가열 또는 냉각이 관여됨이 없이 렌즈-조직 계면에서 정상 상태 온도로부터 41 ℃까지의 온도로 상승 시간을 열거한다.
| 냉각 저장소 온도 | 정상 상태 온도 | |||
| Sylgard 160 | RTV-615 | |||
| 단열되지 않음 | 단열됨 | 단열되지 않음 | 단열됨 | |
| -186 ℃ | 52 ℃ | 42 ℃ | 33 ℃ | 23 ℃ |
| -30 ℃ | 66 ℃ | 64 ℃ | 45 ℃ | 43 ℃ |
| 0 ℃ | 68 ℃ | 68 ℃ | 48 ℃ | 47 ℃ |
| 24 ℃ | 71 ℃ | 72 ℃ | 50 ℃ | 50 ℃ |
| 냉각 저장소 온도 | 41 ℃로의 상승 시간 | ||||
| Sylgard 160 | RTV-615 | ||||
| 단열되지 않음 | 단열됨 | 단열되지 않음 | 단열됨 | ||
| -186 °C | 43 초 | 279 초 | ∞ | ∞ | |
| -30 °C | 4.0 초 | 8.4 초 | 28.9 초 | 60.0 초 | |
| 0 °C | 1.8 초 | 3.3 초 | 22.2 초 | 30.1 초 | |
| 24 °C | 0.7 초 | 1.0 초 | 12.3 초 | 14.5 초 | |
표 3 및 표 4에 열거된 결과는 냉각 저장소 온도가 낮을 때 냉각이 가장 효과적이며, Sylgard 160과 비교하여 감소된 RTV-615의 초음파 감쇠가 렌즈-조직 계면에서 더 낮은 정상 상태 온도뿐만 아니라 41 ℃까지 더 긴 상승 시간를 초래한다는 것을 입증한다. 최저 냉각 저장소 온도에서, 수동 냉각에 의한 상승 시간은 열전 냉각의 상승 시간만큼 길거나 그보다 더 길다(표 2 참조). 그러나, 이들 시나리오에서, 환자 조직의 과-냉각을 방지하기 위해서, 초음파 방출이 꺼져 있을 때 히터(5130)가 관여될 필요가 있을 수 있다. 더 높은 냉각 저장소 온도에 대해서, 수동 냉각으로 달성되는 상승 시간은 열전 냉각으로 달성되는 것보다 짧다.
특징의 조합
전술한 특징뿐만 아니라 아래에 청구된 특징은 본 발명의 범주를 벗어남이 없이 다양한 방식으로 조합될 수 있다. 예를 들어, 본 명세서에 설명된 하나의 의료 장치, 시스템 또는 방법의 양태는 본 명세서에 설명된 다른 의료 장치, 시스템 또는 방법의 특징을 포함하거나 특징을 교환할 수 있음을 이해할 것이다. 다음 예는 전술한 실시예의 가능한 비-제한적 조합을 예시한다. 본 발명의 사상 및 범주를 벗어남이 없이 본 명세서의 방법 및 장치에 대해서 많은 다른 변경 및 수정이 이루어질 수 있음이 명백하다:
(A1) 의료 장치는 표적 조직에 초음파를 방출하도록 구성된 용량성 미세기계가공 초음파 변환기(CMUT) 어레이, 및 CMUT 어레이와 기계적으로 커플링되고 초음파에 의해 가열된 비-표적 조직을 냉각시키도록 구성된 적어도 하나의 열전 냉각기를 포함할 수 있다.
(A2) (A1)으로 나타낸 장치에서, CMUT 어레이는 CMUT 어레이의 제 1 측면으로부터 초음파를 투사하도록 구성될 수 있고, 각각의 열전 냉각기는 CMUT 어레이의 제 2 측면에 열적으로 커플링될 수 있다.
(A3) (A2)로 나타낸 장치에서, CMUT 어레이의 제 1 측면은 CMUT 어레이를 통해 적어도 하나의 열전 냉각기에 의한 비-표적 조직의 냉각을 용이하게 하기 위해서 비-표적 조직과 열적으로 커플링되도록 구성될 수 있다.
(A4) (A2) 및 (A3)로 나타낸 장치 중 어느 하나는 CMUT 어레이의 제 1 측면에 배치된 음향 렌즈를 더 포함할 수 있고, 음향 렌즈는 CMUT 어레이 및 음향 렌즈를 통해 비-표적 조직과 하나 이상의 열전 냉각기 사이에 열 경로를 제공하기 위해서 비-표적 조직과 열적으로 커플링되도록 구성된다.
(A5) (A4)로 나타낸 장치에서, 음향 렌즈는 비-표적 조직과 물리적으로 접촉하도록 구성될 수 있다.
(A6) (A1) 내지 (A5)로 나타낸 임의의 장치는 열전 냉각기로부터 열을 제거하기 위해서 각각의 열전 냉각기에 열적으로 커플링된 고체 열 전도체를 더 포함할 수 있다.
(A7) (A6)으로 나타낸 장치에서, 각각의 열전 냉각기는 (a) CMUT 어레이의 제 2 측면에 열적으로 커플링된 제 1 측면 및 (b) 층의 제 1 측면의 반대 쪽을 향하고 고체 열 전도체에 열적으로 커플링되는 제 2 측면을 갖는 층으로 구현될 수 있다.
(A8) (A6) 및 (A7)로 나타낸 장치 중 어느 하나에서, 고체 열 전도체는 금속을 포함할 수 있다.
(A9) (A1) 내지 (A8)로 나타낸 임의의 장치는 CMUT 어레이를 갖춘 실리콘 기판을 포함할 수 있으며, 각각의 열전 냉각기는 열 전도성 접착제를 통해 실리콘 기판에 접합된다.
(A10) (A1) 내지 (A9)로 나타낸 임의의 장치는 비-표적 조직의 특성을 감지하기 위한 하나 이상의 센서를 더 포함할 수 있으며, 이 특성은 온도, 압력 및 온도와 압력의 조합으로 이루어진 그룹으로부터 선택될 수 있다.
(A11) (A10)으로 나타낸 장치에서, 각각의 센서는 고체 상태 센서일 수 있다.
(A12) (A11)로 나타낸 장치에서, 하나 이상의 고체 상태 센서는 비-표적 조직의 압력을 감지하도록 구성된 스트레인 게이지(strain gauge)를 포함할 수 있다.
(A13) (A1) 내지 (A12)로 나타낸 임의의 장치에서, CMUT 어레이는 평면일 수 있다.
(A14) (A1) 내지 (A12)로 나타낸 임의의 장치에서, CMUT 어레이는 서로 각지게 위치된 2 개의 평면 CMUT 서브어레이(subarray)를 포함할 수 있다.
(A15) (A14)로 나타낸 장치에서, 2 개의 평면 CMUT 서브어레이의 각각의 초음파 방출 면은 CMUT 어레이의 각도 범위를 증가시키기 위해 서로 멀어지게 각도를 이룰 수 있다.
(A16) (A15)로 나타낸 장치에서, 각각의 평면 CMUT 서브어레이는 1 차원으로 신장될 수 있고, 2 개의 평면 CMUT 서브어레이의 각각의 초음파 방출 면들 사이의 각도는 1 차원에 직각인 평면에 있다.
(A17) (A15) 및 (A16)으로 나타낸 장치 중 어느 하나에서, 초음파 방출 면의 각각의 법선 벡터들 사이의 각도는 45 내지 90 도의 범위 내에 있을 수 있다.
(B1) 고체 상태 냉각기능으로 초음파 치료를 위한 카테터는 (a) 표적 조직으로 초음파를 방출하도록 구성된 용량성 미세기계가공 초음파 변환기(CMUT) 어레이, (b) 초음파에 의해 가열된 비-표적 조직을 냉각하도록 구성된 열전 냉각기로서, 초음파 변환기가 카테터의 원위 단부에 배치되는 열전 냉각기, 및 (c) 열전 냉각기에 커플링되고 원위 단부로부터 카테터의 근위 단부 쪽으로 멀어지게 카테터를 따라 연장하여 열전 냉각기로부터 멀리 열을 전도시키는 고체 열 전도체를 포함할 수 있다.
(B2) (B1)으로 나타낸 카테터에서, 열전 냉각기는 CMUT 어레이와 기계적으로 커플링될 수 있다.
(B3) (B1) 및 (B2)로 나타낸 카테터 중 어느 하나에서, 고체 열 전도체는 금속 전도체를 포함할 수 있다.
(B4) (B3)로 나타낸 카테터에서, 금속 전도체는 가요성 편조 와이어 금속 전도체일 수 있다.
(B5) (B1) 내지 (B4)로 나타낸 임의의 카테터는 CMUT 어레이를 카테터 외부의 초음파 구동 회로에 전기적으로 커플링하도록 구성된 제 1 전기 전도체, 및 열전 냉각기를 구동하기 위해서 열전 냉각기를 카테터 외부의 펠티에 구동 회로(Peltier driving circuitry)에 전기적으로 커플링하도록 구성된 제 2 전기 전도체를 더 포함할 수 있다.
(B6) (B1) 내지 (B5)로 나타낸 임의의 카테터는 비-표적 조직의 온도를 감지하기 위한 온도 센서를 더 포함할 수 있다.
(B7) (B1) 내지 (B6)로 나타낸 임의의 카테터는 비-표적 조직의 압력을 감지하기 위한 압력 센서를 더 포함할 수 있다.
(B8) (B1) 내지 (B7)로 나타낸 임의의 카테터는 요도에 삽입되도록 구성될 수 있으며, 표적 조직은 전립선이고 비-표적 조직은 요도의 벽의 적어도 일부분이다.
(B9) (B8)로 나타낸 카테터는 카테터 팁에 CMUT 어레이 및 열전 냉각기를 구현할 수 있고, 카테터 팁에 커플링되고 전립선으로부터 요도의 출구에 도달하기 위한 길이를 갖는 카테터 재킷을 더 포함할 수 있다.
(B10) (B9)로 나타낸 카테터에서, 카테터 재킷은 고체 열 전도체에 의해 전도된 열이 요도의 벽을 손상시키는 것을 방지하기 위한 단열 층을 포함할 수 있다.
(B11) (B9) 및 (B10)으로 나타낸 카테터 중 어느 하나에서, 카테터 팁 및 카테터 재킷 주위에 배치된 제거 가능한 슬리브를 더 포함할 수 있고, 상기 제거 가능한 슬리브는, 제거 가능한 슬리브를 방광에 고정시키는 팽창 가능한 풍선을 포함하고 또한 적어도 방광으로부터 요도의 출구로 도달하는 길이를 가지며 요도로부터 카테터 팁의 추출 후 한동안 요도에 유지되도록 구성된다.
(B12) (B11)로 나타낸 카테터에서, 제거 가능한 슬리브는 고체 열 전도체에 의해 전도된 열이 요도의 벽을 손상시키는 것을 방지하기 위한 단열층을 더 포함할 수 있다.
(B13) (B11) 및 (B12)로 나타낸 카테터 중 어느 하나에서, 카테터의 종축을 중심으로 팽창 가능한 풍선에 대한 카테터 팁의 회전을 허용하는 회전 조인트를 더 포함할 수 있다.
(B14) (B13)으로 나타낸 카테터에서, 회전 조인트는 종축을 중심으로 카테터 팁의 개별적인 복수의 방위를 한정할 수 있다.
(B15) (B11) 내지 (B14)로 나타낸 카테터 중 임의의 카테터에서, 제거 가능한 슬리브는 소변을 방광으로부터 요도의 출구로 통과시키기 위한 도관을 형성할 수 있다.
(B16) (B11) 내지 (B15)로 나타낸 임의의 카테터에서, 제거 가능한 슬리브는 강성일 수 있다.
(B17) (B11) 내지 (B16)으로 나타낸 임의의 카테터에서, 제거 가능한 슬리브는 연성일 수 있다.
(C1) 고체 상태 냉각기능으로 향상된 초음파 치료를 위한 시스템은 (B1) 내지 (B17)로 나타낸 카테터 중 어느 하나, 및 각각 CMUT 어레이와 협력하여 각각의 음향 공동을 형성함으로써 음향 공동 내에서 초음파의 세기를 증가시키도록 구성된 두 개의 음향 미러를 포함할 수 있다.
(C2) (C1)으로 나타낸 시스템은 전립선의 초음파 치료를 위해 구성될 수 있으며, 카테터는 CMUT 어레이를 전립선의 요도에 위치시키도록 구성되고, 2 개의 음향 미러는 각각 a) 직장의 내부에 위치하도록 그리고 (b) 전립선 전방의 외부에 위치하도록 구성된다.
(D1) 의료 장치는 표적 조직을 초음파에 노출시키기 위한 카테터 및 카테터를 적어도 부분적으로 제어하기 위해서 카테터의 근위 단부에 기계적으로 커플링되고 카테터가 내부에 삽입되는 신체 채널 외부에 위치되도록 구성된 카테터 핸들을 포함할 수 있으며, 카테터는 (a) 카테터의 원위 단부에 배치되고 표적 조직으로 초음파를 방출하도록 구성된 용량성 미세기계가공 초음파 변환기(CMUT) 어레이, (b) 초음파에 의해 가열된 비-표적 조직을 냉각시키도록 구성된 열전 냉각기, 및 (c) 열전 냉각기에 커플링되고 카테터의 원위 단부로부터 근위 단부 쪽으로 멀리 카테터를 따라서 연장하여 열전 냉각기로부터 멀리 열을 전도시키는 고체 열 전도체를 포함한다.
(D2) (D1)으로 나타낸 장치에서, 고체 열 전도체는 카테터 핸들까지 연장할 수 있고, 카테터 핸들은 고체 열 전도체를 냉각시키기 위한 열교환기를 포함할 수 있다.
(D3) (D1) 및 (D2)로 나타낸 장치 중 어느 하나에서, 카테터 핸들은 CMUT 어레이를 구동하고 열전 냉각기를 구동하기 위한 전자 회로를 포함할 수 있고, 카테터는 전자 회로를 CMUT 어레이 및 열전 냉각기에 커플링하는 전기 연결부를 포함할 수 있다.
(D4) (D1) 내지 (D3)으로 나타낸 임의의 장치는 (i) 카테터 내에 위치되고 비-표적 조직의 특성을 감지하도록 구성된 하나 이상의 센서로서, 특성은 온도, 압력 및 이의 조합으로 이루어진 그룹으로부터 선택되는, 센서; 및 (ii) 핸들에 위치되고 하나 이상의 센서에 전기적으로 커플링된 측정 회로로서, 측정 회로는 특성을 결정하기 위해서 하나 이상의 센서로부터 센서 신호를 처리하도록 구성되는, 측정 회로를 더 포함할 수 있다.
(D5) (D1) 내지 (D4)로 나타낸 임의의 장치는 카테터를 감싸기 위한 카테터 슬리브를 더 포함할 수 있고, 카테터 슬리브 및 카테터는 신체 채널로부터 카테터의 추출 후 카테터 슬리브를 신체 채널 내에 남겨 둘 수 있도록 제거 가능하게 커플링되며, 카테터 슬리브는 (a) 하나 이상의 조직 특성 센서 및 (b) 카테터 슬리브를 통해 유체를 통과시키기 위한 도관 중 적어도 하나를 포함할 수 있다.
(D6) (D1) 내지 (D5)로 나타낸 임의의 장치에서, 카테터는 전립선에 초음파 치료를 적용하도록 CMUT 어레이 및 열전 냉각기를 전립선에 위치시키기 위해서 요도에 삽입되도록 구성된 요도 카테터일 수 있다.
(D7) (D6)으로 나타낸 장치에서, 카테터는 CMUT 어레이를 포함하는 카테터 팁 및 열전 냉각기를 포함할 수 있으며, 핸들은 전립선과 관련된 기준 위치에 대해 카테터 팁의 위치를 변경하기 위한 작동기를 포함한다.
(D8) (D7)으로 나타낸 장치에서, 핸들은 기준 위치에 대한 카테터 팁의 위치를 나타내는 표시기를 더 포함할 수 있다.
(D9) (D8)으로 나타낸 장치에서, 카테터는 카테터의 종축을 중심으로 카테터 팁의 회전을 허용하는 회전 조인트를 포함할 수 있고, 작동기는 종축을 중심으로 카테터 팁을 회전시킬 수 있다.
(D10) (D8) 및 (D9)로 나타낸 장치 중 어느 하나에서, 작동기는 카테터의 종축을 따르는 방향으로 카테터 팁의 위치를 조정할 수 있다.
(E1) 향상된 초음파 치료를 위한 시스템은 (a) 초음파 변환기 어레이를 포함하고 신체의 채널에 초음파 변환기 어레이를 위치시켜 신체의 표적 조직을 초음파에 노출 시키도록 구성된 카테터, 및 (b) 초음파 변환기 어레이와 음향 미러 사이에 정재 음향 파를 생성함으로써 표적 조직에서 초음파의 세기를 향상시키는 음향 공동을 형성하기 위해서, 초음파 변환기 어레이와 대향하는 표적 조직의 측면에서 채널의 외부에 위치하도록 각각 구성되는 적어도 하나의 음향 미러를 포함할 수 있다.
(E2) (E1)으로 나타낸 시스템에서, 카테터는 초음파로 전립선을 치료하기 위해서 초음파 변환기 어레이를 전립선에 위치시키도록 구성된 요도 카테터일 수 있다.
(E3) (E2)로 나타낸 시스템에서, 적어도 하나의 음향 미러는 신체 외부 및 전립선 전방에 위치하도록 구성된 제 1 음향 미러 및 신체의 직장에 위치하도록 구성된 제 2 음향 미러를 포함할 수 있다.
(E4) (E1) 내지 (E3)으로 나타낸 임의의 시스템에서, 초음파 변환기 어레이는 용량성 미세기계가공 초음파 변환기 어레이일 수 있다.
(E5) (E1) 내지 (E3)으로 나타낸 임의의 시스템에서, 초음파 변환기 어레이는 압전 초음파 변환기 어레이이다.
(F1) 향상된 초음파 치료를 위한 시스템은 제 1 초음파 변환기 어레이, 및 제 1 초음파 변환기 어레이와 협력하여 음향 공동 내에 정재 음향 파를 생성함으로써 제 1 변환기 어레이 및 제 2 초음파 변환기 어레이에 의해 발생된 초음파의 세기를 표적 조직에서 향상시키는 음향 공동을 형성하도록 구성된 제 2 초음파 변환기 어레이를 포함할 수 있다.
(F2) (F1)으로 나타낸 시스템은 제 1 초음파 변환기 어레이의 초음파 방출과 제 2 초음파 변환기 어레이의 초음파 방출 사이의 위상 편이를 조정하여 정재 음향 파의 각각의 안티노드(antinode)의 위치를 조정하도록 구성된 제어 모듈을 더 포함할 수 있다.
(F3) (F2)로 나타낸 시스템에서, 제어 모듈은 각각의 안티노드의 위치를 스위핑하기 위해서 위상 편이를 스위핑하도록 구성될 수 있다.
(F4) (F1) 내지 (F3)으로 나타낸 임의의 시스템은 제 1 초음파 변환기 어레이를 포함하는 요도 카테터를 포함할 수 있으며, 요도 카테터는 제 1 초음파 변환기 어레이를 요도에서 대상자의 전립선에 위치시켜 전립선의 일부분이 음향 공동에 의해 포함되도록 구성된다.
(F5) (F4)로 나타낸 시스템에서, 제 1 초음파 변환기 어레이는 용량성 미세기계가공 초음파 변환기(CMUT) 어레이일 수 있고, 요도 카테터는 CMUT 어레이와 기계적으로 커플링되고 초음파에 의해 가열된 요도의 벽의 일부분을 냉각시키도록 구성된 적어도 하나의 열전 냉각기를 더 포함할 수 있다.
(F6) (F5)로 나타낸 시스템에서, 제 1 초음파 변환기 장치는 요도 카테터의 원위 단부에서 구현될 수 있고, 요도 카테터는 적어도 하나의 열전 냉각기에 커플링되고 카테터의 원위 단부로부터 근위 단부 쪽으로 멀리 요도 카테터를 따라서 연장하여 열전 냉각기로부터 멀리 열을 전도시키는 고체 열 전도체를 더 포함할 수 있다.
(F7) (F4) 내지 (F6)으로 나타낸 임의의 시스템은 제 2 초음파 변환기 어레이를 포함하는 직장 카테터를 포함할 수 있으며, 직장 카테터는 제 2 초음파 변환기 어레이를 직장에 위치시켜 음향 공동이 전립선의 후방 부분을 포함하도록 구성된다.
(F8) (F4) 내지 (F6)으로 나타낸 임의의 시스템에서, 제 2 초음파 변환기는 음향 공동이 전립선의 전방 부분을 포함하도록, 대상자 전방의 외부 신체를 전립선에 위치시키도록 구성될 수 있다.
(F9) (F1) 내지 (F8)으로 나타낸 임의의 시스템에서, 제 1 초음파 변환기 어레이 및 제 2 초음파 변환기 어레이 각각은 용량성 미세기계가공 초음파 변환기 어레이일 수 있다.
(F10) (F1) 내지 (F8)으로 나타낸 임의의 시스템에서, 제 1 초음파 변환기 어레이 및 제 2 초음파 변환기 어레이 각각은 압전 초음파 변환기 어레이이다.
(G1) 고체 상태 냉각기능을 갖춘 카테터 또는 카테터 슬리브는 신체의 채널 내로 삽입하기 위한 관형 벽, 및 채널의 조직을 냉각시키기 위해 관형 벽에 커플링된 적어도 하나의 열전 냉각기를 포함할 수 있다.
(G2) (G1)으로 나타낸 카테터 또는 카테터 슬리브에서, 각각의 열전 냉각기는 관형 벽의 외부에 장착될 수 있고 열전 냉각기의 저온 측이 관형 벽으로부터 멀어지게 그리고 열전 냉각기의 고온 측이 관형 벽을 향하게 작동하도록 구성될 수 있다.
(G3) (G2)로 나타낸 카테터 또는 카테터 슬리브는 관형 벽에 의해 구획된 공간 내에 위치되고 각각의 열전 냉각기의 고온 측에 열적으로 커플링되어 고온 측으로부터 열을 제거하는 고체 열 전도체를 더 포함할 수 있다.
(G4) (G3)으로 나타낸 카테터 또는 카테터 슬리브에서, 적어도 하나의 열전 냉각기로부터 떨어진 관형 벽의 적어도 일부분은 고체 열 전도체에 의해 전도된 열이 관형 벽의 적어도 일부분과의 열 접촉하여 조직을 손상시키는 것을 방지하기 위해서 단열 층을 포함할 수 있다.
(G5) (G2)로 나타낸 카테터 또는 카테터 슬리브는 (a) 관형 벽의 외부에 배치되거나 관형 벽에 통합된 고체 열 전도체로서, 고체 열 전도체가 각각의 열전 냉각기의 고온 측에 열적으로 커플링되어 각각의 열전 냉각기의 고온 측으로부터 열을 제거하는, 고체 열 전도체; 및 (b) 고체 열 전도체에 의해 전도된 열이 고체 열 전도체에 인접한 조직을 손상시키는 것을 방지하기 위해서 고체 열 전도체의 외부에 배치된 단열 층을 더 포함할 수 있다.
(G6) (G2)로 나타낸 카테터 또는 카테터 슬리브에서, 관형 벽은 채널의 외부에 있도록 구성된 근위 단부를 가질 수 있으며, 각각의 열전 냉각기는 관형 벽의 섹션에서 근위 단부로부터 멀리 떨어져 있을 수 있으며, 카테터는 각각의 열전 냉각기의 고온 측에 열적으로 커플링되고 관형 벽의 근위 단부로 연장하여 채널로부터 각각의 열전 냉각기의 고온 측으로부터 열을 전도하는 고체 열 전도체를 더 포함할 수 있다.
(G7) (G2) 내지 (G6)으로 나타낸 임의의 카테터 또는 카테터 슬리브에서, 각각의 열전 냉각기는 (i) 직렬 커플링이 n-형 반도체와 p-형 반도체 사이에서 교대하도록 전기적으로 직렬로 커플링된 복수의 n-형 반도체 및 복수의 p-형 반도체, (ii) n-측 반도체와 p-형 반도체를 저온 측에 열적으로 커플링하는 제 1 열 전도체, 및 (iii) 관형 벽의 외부에 장착되고 n-형 반도체 및 p-형 반도체를 고온 측에 열적으로 커플링시키는 제 2 열 전도체를 포함할 수 있다.
(G8) (G7)로 나타낸 카테터 또는 카테터 슬리브에서, 열전 냉각기를 지지하는 관형 벽의 일부분은 강성일 수 있고, n-형 반도체 및 p-형 반도체는 관형 벽의 곡률에 따르는 강성 구성으로 배열될 수 있다.
(G9) (G7)로 나타낸 카테터 또는 카테터 슬리브에서, 열전 냉각기를 지지하는 관형 벽의 일부분은 연성일 수 있고, n-형 반도체와 p-형 반도체 사이의 전기 연결은 관형 벽의 일부분의 굽힘에 따르도록 유연할 수 있다.
(H1) 통합된 감지기능을 갖춘 카테터 슬리브는 신체의 채널에 삽입되고 카테터를 감쌀 수 있는 관형 케이싱, 및 관형 케이싱에 커플링되고 채널의 조직의 하나 이상의 특성을 감지하도록 구성된 적어도 하나의 센서를 포함할 수 있으며, 하나 이상의 특성 각각은 온도 및 압력으로 이루어진 그룹으로부터 선택된다.
(H2) (H1)으로 나타낸 카테터 슬리브는 요도 카테터를 감싸도록 구성될 수 있다.
(H3) (H2)로 나타낸 카테터 슬리브는 방광으로부터 요도 밖으로 소변을 통과시키기 위한 도관을 더 포함할 수 있다.
(H4) (H3)으로 나타낸 카테터 슬리브에서, 도관은 관형 케이싱 내에 형성될 수 있다.
(H5) (H1) 내지 (H4)로 나타낸 임의의 카테터 슬리브는 카테터 슬리브를 방광에 고정하기 위한 팽창 가능한 풍선, 및 팽창 가능한 풍선을 팽창시키기 위해서 유체를 팽창 가능한 풍선으로 통과시키기 위한 도관을 더 포함할 수 있다.
(H6) (H5)로 나타낸 카테터 슬리브에서, 도관은 관형 케이싱 내에 형성될 수 있다.
(H7) (H1) 내지 (H6)으로 나타낸 임의의 카테터 슬리브에서, 적어도 하나의 센서는 복수의 장소에서 적어도 하나의 특성을 감지하기 위해서 복수의 센서를 포함할 수 있다.
(H8) (H1) 내지 (H7)로 나타낸 임의의 카테터 슬리브에서, 관형 케이싱은 적어도 하나의 센서에 커플링되고 관형 케이싱의 근위 단부 쪽으로 연장하여 채널 외부의 전자 회로로 조직의 하나 이상의 특성을 나타내는 적어도 하나의 센서 신호를 전달하는 하나 이상의 전기 연결부를 포함할 수 있다.
(H9) (H1) 내지 (H8)으로 나타낸 임의의 카테터 슬리브에서, 적어도 하나의 센서는 능동 센서를 포함할 수 있고, 전기적 연결부는 채널 외부의 전원으로부터 능동 센서로의 전력 연결부를 포함할 수 있다.
(H10) (H9)로 나타낸 카테터 슬리브에서, 관형 케이싱은 연성 폴리머 케이싱을 포함할 수 있고, 전기 연결부는 연성 폴리머 케이싱에 형성될 수 있다.
(H11) (H1) 내지 (H8)으로 나타낸 임의의 카테터 슬리브에서, 각각의 센서는 수동 센서일 수 있다.
(H12) (H11)로 나타낸 카테터 슬리브에서, 각각의 센서는 카테터에 의해 각각의 센서 신호를 판독하기 위해서 슬리브 내에 배치된 카테터에 무선으로 커플링되도록 구성될 수 있다.
(H13) (H11)로 나타낸 카테터 슬리브에서, 각각의 센서는 카테터에 의해 각각의 센서 신호를 판독하기 위해서 슬리브 내에 배치된 카테터의 전기 연결부와 전기적으로 커플링되도록 구성된 전기 연결부를 포함할 수 있다.
(I1) 고체 상태 냉각기능으로 초음파 치료를 위한 시스템은 (1) 표적 조직을 초음파에 노출시키도록 용량성 미세기계가공 초음파 변환기(CMUT) 어레이를 구동하기 위한 구동 신호를 발생하도록된 초음파 구동 회로, 및 (2) 초음파에 의해 가열된 비-표적 조직을 냉각시키기 위해서 적어도 하나의 열전 냉각기를 구동하도록 구성된 펠티에 구동 회로를 포함할 수 있다.
(I2) (I1)으로 나타낸 시스템은 (a) 표적 조직을 이미지화하기 위해서 CMUT 어레이를 구동하도록 복수의 제 2 신호를 생성하고 (b) CMUT 어레이로부터 수신된 전기 변환기 신호로부터 표적 조직의 초음파 이미지를 생성하도록 구성된 초음파 이미징 회로를 더 포함할 수 있다.
(I3) (I2)로 나타낸 시스템은 초음파 이미지에 적어도 부분적으로 기초하여 초음파 구동 회로에 의한 구동 신호의 발생을 제어하도록 구성된 제어 모듈을 더 포함할 수 있다.
(I4) (I3)으로 나타낸 시스템에서, 제어 모듈은 클러터 신호 및 클러터 신호와 초음파 치료 효능 사이의 미리 결정된 대응관계에 적어도 부분적으로 기초하여 초음파 구동 회로에 의한 구동 신호의 발생을 제어하도록 구성될 수 있다.
(I5) (I3) 및 (I4)로 나타낸 어느 하나의 시스템에서, 초음파 이미징 회로는 전기 변환기 신호로부터 표적 조직의 도플러 이미지를 생성하여 표적 조직의 혈액 관류 정도를 평가하도록 구성될 수 있다.
(I6) (I3) 내지 (I5)로 나타낸 임의의 시스템에서, 초음파 이미징 회로는 전기 변환기 신호로부터 표적 조직의 밝기 이미지를 생성하도록 구성될 수 있다.
(I7) (I3) 내지 (I6)으로 나타낸 임의의 시스템은 비-표적 조직의 특성을 결정하기 위해서 하나 이상의 센서로부터의 신호를 처리하도록 구성된 측정 회로를 더 포함할 수 있으며, 특성은 온도, 압력 및 이의 조합으로 이루어지는 그룹으로부터 신택되며, 제어 모듈은 초음파 이미지 및 특성에 기초하여 초음파 구동 회로에 의한 구동 신호의 발생을 제어하도록 구성된다.
(I8) (I1) 내지 (I7)로 나타낸 임의의 시스템은 하나 이상의 온도 센서로부터의 신호를 처리하여 비-표적 조직의 적어도 일부분의 하나 이상의 각각의 온도를 결정하도록 구성된 온도 측정 회로를 더 포함할 수 있다.
(I9) (I1) 내지 (I8)로 나타낸 임의의 시스템은 비-표적 조직의 하나 이상의 각각의 압력을 결정하기 위해서 하나 이상의 압력 센서로부터의 신호를 처리하도록 구성된 압력 측정 회로를 더 포함할 수 있다.
(I10) (I1) 내지 (I9)로 나타낸 임의의 시스템은 (i) 비-표적 조직의 특성을 결정하기 위해서 하나 이상의 센서로부터의 신호를 처리하도록 구성된 측정 회로로서, 특성이 온도, 압력 및 이의 조합으로 이루어진 그룹으로부터 선택되는, 측정 회로; (ii) 특성에 적어도 부분적으로 기초하여 초음파 구동 회로에 의한 구동 신호의 발생을 제어하도록 구성된 제어 모듈을 더 포함할 수 있다.
(I11) (I1) 내지 (I10)으로 나타낸 임의의 시스템은 (i) CMUT 어레이 및 적어도 하나의 열전 냉각기를 포함한 카테터로서, 카테터가 신체 채널 내로 삽입되도록 구성되는, 카테터; (ii) 카테터와 기계적으로 커플링되고 초음파 구동 회로 및 펠티어 구동 회로를 포함하는 핸들로서, 핸들이 신체 채널 외부에 위치하도록 구성되는, 핸들을 더 포함할 수 있다.
(I12) (I11)로 나타낸 시스템에서, 카테터는 CMUT 어레이와 초음파 구동 회로 사이의 제 1 전기 연결부 및 적어도 하나의 열전 냉각기와 펠티에 구동 회로 사이의 제 2 전기 연결부를 포함할 수 있다.
(I13) (I12)로 나타낸 시스템에서, 카테터는 적어도 하나의 열전 냉각기로부터 신체 채널 외부로 열을 전도하기 위해서 적어도 하나의 열전 냉각기에 열적으로 커플링되고 핸들로 연장하는 고체 열 전도체를 더 포함할 수 있다.
(I14) (I13)으로 나타낸 시스템에서, 핸들은 고체 열 전도체로부터 열을 제거하기 위한 열 교환기를 더 포함할 수 있다.
(I15) (I11) 내지 (I14)로 나타낸 임의의 시스템은 (I) 카테터 내에 위치되고 비-표적 조직의 특성을 감지하도록 구성된 하나 이상의 센서로서, 특성이 온도, 압력 및 이의 조합으로 이루어진 그룹으로부터 선택되는, 하나 이상의 센서; (II) 핸들 내에 위치되고 하나 이상의 센서로부터 수신된 하나 이상의 센서 신호로부터 특성을 결정하기 위해서 하나 이상의 센서로부터 센서 신호를 처리하도록 구성된 측정 회로; 및 (III) 카테터를 통과하고 하나 이상의 센서를 측정 회로에 연결하여 센서 신호를 전달하는 제 3 전기 연결부를 더 포함할 수 있다.
(I16) (I11) 내지 (I15)로 나타낸 임의의 시스템에서, 카테터는 CMUT 어레이 및 적어도 하나의 열전 냉각기를 전립선에 위치시키기 위해 요도에 삽입되어 전립선에 초음파 치료를 적용하도록 구성된 요도 카테터일 수 있다.
(J1) 고체 상태 냉각기능을 갖춘 초음파 치료용 방법은 용량성 미세기계가공 초음파 변환기(CMUT) 어레이에 의해 발생된 초음파에 표적 조직을 노출시키는 단계, 비-표적 조직에 대한 손상을 방지하기 위해서 하나 이상의 열전 냉각기를 사용하여 비-표적 조직을 냉각시키는 단계, 및 하나 이상의 열전 냉각기로부터 그리고 비-표적 조직으로부터 멀리 열을 제거하는 단계를 포함할 수 있다.
(J2) (J1)으로 나타낸 방법은 (a) 노출 단계에서, 신체 채널 내에 초음파를 발생시키는 단계로서, CMUT 어레이가 신체 채널을 통해 카테터의 표적 조직으로 전진되는, 단계; (b) 냉각 단계에서, 하나 이상의 열전 냉각기를 사용하여 신체 채널의 벽을 냉각시키는 단계로서, 하나 이상의 열전 냉각기는 CMUT 어레이와 카테터 중 적어도 하나에 커플링되는, 단계; 및 (c) 제거 단계에서, 벽으로부터 열을 제거하는 단계를 포함할 수 있다.
(J3) (J2)로 나타낸 방법은 노출 단계에서, 전립선을 요도로부터의 초음파에 노출시키는 단계, 및 냉각 단계에서 요도의 벽을 냉각시키는 단계를 포함할 수 있다.
(J4) (J2) 및 (J3)으로 나타낸 방법 중 어느 하나에서, 표적 조직은 전립선의 적어도 일부분일 수 있으며, 노출 단계는 전립선 비대증을 치료하기 위해서 표적 조직의 괴사를 유도하는 단계를 포함할 수 있다.
(J5) (J2) 및 (J3)으로 나타낸 방법 중 어느 하나에서, 표적 조직은 전립선의 암성 종양일 수 있으며, 노출 단계는 암성 종양 조직의 괴사를 유도하는 단계를 포함할 수 있다.
(J6) (J2) 내지 (J5)로 나타낸 임의의 방법에서, 제거 단계는 하나 이상의 열전 냉각기에 커플링되고 카테터를 통해 신체 채널의 출구 쪽으로 연장하는 고체 열 전도체를 통해 하나 이상의 열전 냉각기로부터 열을 멀리 전도시키는 단계를 포함할 수 있다.
(J7) (J6)으로 나타낸 방법에서, 제거 단계는 고체 열 전도체를 통해 열의 적어도 일부를 출구 외부로 전도하는 단계를 포함할 수 있다.
(J8) (J7)으로 나타낸 방법은 출구 외부의 고체 열 전도체를 냉각시키는 단계를 더 포함할 수 있다.
(J9) (J6)으로 나타낸 방법에서, 제거 단계는 카테터의 적어도 일부분을 가로질러 열을 재분배하는 단계를 포함할 수 있다.
(J10) (J1) 내지 (J9)로 나타낸 임의의 방법은 비-표적 조직의 온도를 모니터링하는 단계, 및 노출 단계에서 온도에 따라서 초음파에 대한 표적 조직의 노출을 조정하는 단계를 더 포함할 수 있다.
(J11) (J10)으로 나타낸 방법에서, 조정 단계는 온도가 임계 온도를 초과할 때 상기 노출을 적어도 일시적으로 중단시키는 단계를 포함할 수 있다.
(J12) (J1) 내지 (J10)으로 나타낸 임의의 방법은 비-표적 조직의 압력을 모니터링하는 단계, 및 노출 단계에서 압력에 따라서 초음파에 대한 표적 조직의 노출을 조정하는 단계를 더 포함할 수 있다.
(J13) (J12)로 나타낸 방법에서, 비-표적 조직은 신체 채널의 벽일 수 있으며, 이를 통해 CMUT 어레이가 표적 조직으로 전진된다.
(J14) (J1) 내지 (J13)으로 나타낸 임의의 방법은 CMUT 어레이를 사용하여 표적 조직을 이미징하여 노출 단계의 표적 조직에 대한 효능을 나타내는 초음파 이미지를 얻는 단계, 및 노출 단계에서 효능에 따라서 초음파에 대한 표적 조직의 노출을 조정하는 단계를 더 포함할 수 있다.
(J15) (J14)로 나타낸 방법은 노출 및 이미징 단계를 교대로 수행하는 단계를 포함할 수 있다.
(J16) (J14) 및 (J15)로 나타낸 방법 중 어느 하나는 초음파 이미지에 기초하여, 위치의 함수로서의 효과를 초음파 치료의 목적과 비교하여 추가 초음파 노출을 필요로 하는 표적 조직의 제 1 부분을 식별하는 단계, 및 조정 단계에서, CMUT 어레이의 초음파 방출을 재지향시켜 제 1 부분에 대한 초음파 노출을 증가시키는 단계를 더 포함할 수 있다.
(J17) (J16)으로 나타낸 방법에서, 재지향 단계는 CMUT 어레이에 빔포밍을 적용하여 초음파의 적어도 일부분을 표적 조직의 제 1 부분에 포커싱하는 단계를 포함할 수 있다.
(J18) (J16) 및 (J17)로 나타낸 방법 중 어느 하나에서, 노출 단계는 신체 채널 내에 초음파를 발생하는 단계를 포함할 수 있으며, CMUT 어레이는 신체 채널을 통해 카테터의 표적 조직으로 전진되며, 재지향 단계는 신체 채널에서 CMUT 어레이를 회전시켜 초음파의 적어도 일부분을 표적 조직의 제 1 부분으로 지향시키는 단계를 포함할 수 있다.
(J19) (J14) 내지 (J18)으로 나타낸 임의의 방법은 이미징 단계에서 공간적으로 분해된 클러터 신호를 기록하는 단계, 클러터 신호로부터 초음파 치료의 즉각적인 효능을 추론하는 단계, 및 조정 단계에서 즉각적인 효능에 따라서 노출을 조정하는 단계를 포함할 수 있다.
(J20) (J1) 내지 (J19)로 나타낸 임의의 방법에서, 노출 단계는 표적 조직의 상이한 부분을 초음파로 순차적으로 표적화하는 단계를 포함할 수 있다.
(J21) (J20)으로 나타낸 방법에서, 순차적으로 표적화하는 단계는 카테터의 종축을 따른 복수의 위치에 CMUT 어레이를 순차적으로 위치시키는 단계를 포함할 수 있다.
(J22) (J20) 및 (J21)로 나타낸 방법 중 어느 하나에서, 순차적으로 표적화하는 단계는 카테터의 종축을 중심으로 CMUT 어레이를 회전시키는 단계를 포함할 수 있다.
(J23) (J20) 내지 (J22)로 나타낸 임의의 방법에서, 순차적으로 표적화하는 단계는 CMUT 어레이에 빔포밍을 적용하여 초음파의 적어도 일부분을 상이한 부분에 순차적으로 포커싱하는 단계를 포함할 수 있다.
(J24) (J1) 내지 (J23)으로 나타낸 임의의 방법은 표적 조직 주위 및 표적 조직을 포함한 더 큰 조직 영역을 가열하는 단계를 더 포함할 수 있다.
(J25) (J1) 내지 (J23)으로 나타낸 임의의 방법에서, 노출 단계는 표적 조직을 다중 주파수 초음파에 노출시켜 초음파를 표적 조직의 국소 영역에 포커싱하는 단계를 포함할 수 있다.
(J26) (J25)로 나타낸 방법에서, 표적 조직은 암성 전립선 종양일 수 있다.
(K1) 초음파 이미징 피드백으로 초음파 치료를 위한 방법은 표적 조직에 대한 공간적으로 분해된 클러터 신호를 결정하기 위해서 초음파 변환기 어레이로부터 표적 조직의 이미지를 얻는 단계, 및 클러터 신호 및 클러터 신호와 치료 효능 사이의 미리 결정된 대응관계에 기초하여 표적 조직을 치료하기 위해서 초음파 변환기 어레이에 의한 후속 초음파 발생에 대한 하나 이상의 특성을 결정하는 단계를 포함할 수 있다.
(K2) (K1)으로 나타낸 방법은 공간적으로 분해된 클러터 신호를 업데이트하기 위해서 얻는 단계를 반복적으로 수행하는 단계, 및 하나 이상의 특성을 업데이트하기 위해서 업데이트된 대로의 공간적으로 분해된 클러터 신호에 따라서 결정 단계를 반복적으로 수정하는 단계를 포함할 수 있다.
(K3) (K1) 및 (K2)로 나타낸 방법 중 하나는 하나 이상의 특성을 갖는 초음파를 발생시키도록 초음파 변환기 어레이에게 명령하는 단계를 더 포함할 수 있다.
(K4) (K3)으로 나타낸 방법은 얻는 단계 및 명령 단계를 교대로 수행하는 단계를 포함할 수 있다.
(K5) (K1) 내지 (K4)로 나타낸 임의의 방법에서, 결정 단계는 초음파에 의해 가열된 비-표적 조직의 온도 측정치를 고려하여 하나 이상의 특성을 결정하는 단계를 더 포함할 수 있다.
(K6) (K5)로 나타낸 방법에서, 표적 조직은 전립선 조직일 수 있고, 비-표적 조직은 요도 벽의 일부분이다.
(K7) (K5) 및 (K6)으로 나타낸 방법 중 어느 하나는 측정된 대로의 온도가 임계 온도를 초과할 때 초음파의 발생을 적어도 일시적으로 중단시키는 단계를 포함할 수 있다.
(K8) (K1) 내지 (K4)로 나타낸 임의의 방법에서, 결정 단계는 초음파에 의해 가열된 비-표적 조직의 온도와 압력 중 하나 또는 둘 모두의 측정치를 고려하여 하나 이상의 특성을 결정하는 단계를 더 포함할 수 있다.
(K9) (K8)으로 나타낸 방법에서, 표적 조직은 전립선 조직일 수 있고, 비-표적 조직은 요도 벽의 일부일 수 있다.
(K10) (K1) 내지 (K9)로 나타낸 임의의 방법에서, 결정 단계는 표적 조직 내의 위치의 함수로서 초음파 변환기 어레이에 의해 후에 발생될 초음파의 세기를 결정하는 단계를 포함할 수 있다.
(K11) (K10)으로 나타낸 방법은 결정 단계에서 결정된 대로의 위치 함수로서의 세기에 따라서 초음파를 빔포밍하도록 초음파 변환기 어레이에게 명령하는 단계를 포함할 수 있다.
(K12) (K11)으로 나타낸 방법에서, 명령 단계는 초음파를 표적 조직의 하나 이상의 국소 영역에 포커싱하기 위해서 초음파 변환기 어레이에게 명령하는 단계를 포함할 수 있다.
(K13) (K1) 내지 (K12)로 나타낸 임의의 방법은 얻는 단계에서 전립선의 이미지를 얻는 단계, 및 결정 단계에서 전립선의 초음파 치료를 가능하게 하기 위해서 전립선 조직에 적용 가능한 하나 이상의 특성을 결정하도록 클러터 신호와 치료 효능 사이의 전립선-조직 특이적, 미리 결정된 대응관계를 이용하는 단계를 포함할 수 있다.
(K14) (K1) 내지 (K13)으로 나타낸 임의의 방법에서, 결정 단계는 혈액-관류 특이적 대응관계의 선택으로부터 미리 결정된 대응관계를 선택하는 단계를 포함할 수 있다.
(K15) (K14)로 나타낸 방법은 초음파 변환기 어레이에 의해 발생된 표적 조직의 도플러 이미지로부터 표적 조직의 혈액 관류 정도를 평가하는 단계, 및 결정 단계에서 혈액 관류 정도에 따라서 혈액 관류 특이적 대응관계의 선택으로부터 미리 결정된 대응관계를 선택하는 단계를 더 포함할 수 있다.
(L1) 초음파 이미징 피드백을 사용하여 초음파 치료를 제어하기 위한 제품은 비-일시적 메모리에 인코딩된 기계 판독 가능한 명령어를 포함할 수 있고, 기계 판독 가능한 명령어는 (a) 초음파 클러터 신호와 초음파 치료의 효능 사이의 대응관계, 및 (b) 프로세서에 의해 실행될 때, 표적 조직의 초음파 이미징으로부터 얻은 공간적으로 분해된 클러터 신호를 평가하고 표적 조직의 후속 초음파 노출에 대한 하나 이상의 특성을 결정하기 위해서 대응관계를 이용하는 치료 제어 명령어를 포함한다.
(L2) (L1)으로 나타낸 제품에서, 치료 제어 명령어는 하나 이상의 특성을 반복적으로 결정하여, 초음파 이미징의 반복으로부터 업데이트된 공간적으로 분해된 클러터 신호에 따라서 초음파 노출을 조정하도록 구성될 수 있다.
(L3) (L1) 및 (L2)로 나타낸 제품 중 어느 하나에서, 치료 제어 명령어는 하나 이상의 특성을 결정할 때 초음파 노출에 의해 가열된 비-표적 조직의 온도 측정치를 추가로 고려하도록 구성될 수 있다.
(L4) (L3)으로 나타낸 제품에서, 기계 판독 가능한 명령어는 임계 온도를 더 포함할 수 있고, 치료 제어 명령어는 측정된 대로의 온도가 임계 온도를 초과할 때 초음파 노출을 적어도 일시적으로 중단하도록 구성될 수 있다.
(L5) (L1) 내지 (L4)로 나타낸 임의의 제품에서, 특성 중 적어도 하나는 초음파 노출이 위치에 민감하도록 공간적으로 분해될 수 있다.
(L6) (L5)로 나타낸 제품에서, 치료 제어 명령어는 프로세서에 의해 실행될 때, 공간적으로 분해된 클러터 신호 및 대응관계에 기초하여, 표적 조직의 하나 이상의 국소 영역에 초음파 노출의 포커싱을 위해서 초음파 변환기 어레이를 구동하도록 구성된 복수의 구동 신호를 발생하는 빔포밍 명령어를 포함할 수 있다.
(L7) (L1) 내지 (L6)으로 나타낸 임의의 제품에서, 대응관계는 전립선의 초음파 치료를 가능하게 하기 위해서 전립선 조직에 적용될 수 있다.
(L8) (L1) 내지 (L7)로 나타낸 임의의 제품에서, 대응관계는 표적 조직에서의 혈액 관류 정도에 민감할 수 있다.
(L9) (L8)으로 나타낸 제품에서, 기계 판독 가능한 명령어는 프로세서에 의해 실행될 때, 초음파 클러터 신호와 효능 사이의 복수의 혈액-관류 특이적 대응관계로부터 대응관계를 선택하는 대응관계 선택 명령어를 더 포함할 수 있다.
(L10) (L9)로 나타낸 제품에서, 기계 판독 가능한 명령어는 프로세서에 의해 실행될 때, 전립선 조직의 초음파 도플러 이미지로부터 혈액 관류 정도를 결정하는 관류 평가 명령어를 더 포함할 수 있다.
(L11) (L1) 내지 (L10)으로 나타낸 임의의 제품에서, 효능은 표적 조직의 탄성 및 에코발생도로 이루어진 그룹으로부터 선택된 하나 이상의 특성을 특징으로 할 수 있다.
(L12) (L1) 내지 (L10)으로 나타낸 임의의 제품에서, 효능은 표적 조직의 탄성, 괴사 및 온도로 이루어진 그룹으로부터 선택된 하나 이상의 특성을 특징으로 할 수 있다.
(M1) 고체 상태 냉각기능을 갖춘 용량성 미세기계가공 초음파 변환기(CMUT) 어레이의 제작 방법은 열전 냉각기의 제 1 열 전도체에 CMUT 어레이를 제작하는 단계를 포함할 수 있으며, 열전 냉각기는 제 1 열 전도체, 제 2 열 전도체, 및 제 1 열 전도체와 제 2 열 전도체 사이에 배치되고 n-형 반도체와 p-형 반도체 사이에서 직렬 커플링이 교대하도록 직렬로 전기적으로 커플링되는 복수의 n-형 반도체와 복수의 p-형 반도체를 포함한다.
(M2) (M1)으로 나타낸 방법에서, 제 1 열 전도체 및 제 2 열 전도체 각각은 전기 절연체일 수 있다.
(M3) (M1) 및 (M2)로 나타낸 방법 중 어느 하나에서, 제작 단계는 (a) 제 1 열 전도체에 CMUT 어레이의 복수의 제 1 전극을 증착하는 단계, (b) 제 1 열 전도체에 전기 절연 층을 형성하고 제 1 전극을 덮는 단계로서, 전기 절연 층은 내부에 복수의 진공 공동을 가지며, 각각의 진공 공동은 CMUT 어레이의 각각의 변환기에 대응하고 제 1 전극의 각각의 하나 위에 위치되는, 단계; 및 (c) 전기 절연 층에 CMUT 어레이의 복수의 제 2 전극을 증착하는 단계로서, 각각의 제 2 전극은 진공 공동의 각각의 하나 위에 배치되는 단계를 포함할 수 있다.
(M4) (M3)으로 나타낸 방법은 제 2 전극 위에 보호 층을 증착하는 단계를 더 포함할 수 있다.
위의 장치, 시스템 및 방법에서 본 발명의 범주를 벗어남이 없이 변경이 이루어질 수 있다. 따라서, 위의 설명에 포함되고 첨부 도면에 도시된 사항은 제한적인 의미가 아니라 예시적인 의미로 해석되어야 함에 유의해야 한다. 다음의 청구범위는 본 명세서에 설명된 일반적인 특징 및 특이한 특징뿐만 아니라, 언어의 문제로서 그 사이에 속하는 것으로 말할 수 있는 본 발명의 장치, 시스템 및 방법의 범주에 대한 모든 진술을 포함하도록 의도된다.
Claims (26)
- 의료 장치로서,
표적 조직에 초음파를 방출하도록 구성된 용량성 미세기계가공 초음파 변환기(Capacitive micromachiend ultrasonic transduers:CMUT) 어레이, 및
CMUT 어레이와 기계적으로 커플링되고 초음파에 의해 가열된 비-표적 조직을 냉각시키도록 구성된 적어도 하나의 열전 냉각기를 포함하는,
의료 장치. - 제 1 항에 있어서,
상기 CMUT 어레이는 CMUT 어레이의 제 1 측면으로부터 초음파를 투사하도록 구성되고, 각각의 열전 냉각기는 CMUT 어레이의 제 2 측면에 열적으로 커플링되는,
의료 장치. - 제 2 항에 있어서,
상기 CMUT 어레이의 제 1 측면에 배치된 음향 렌즈를 더 포함하고, 상기 음향 렌즈는, CMUT 어레이 및 음향 렌즈를 통해 비-표적 조직과 하나 이상의 열전 냉각기 사이에 열 경로를 제공하기 위해서 상기 비-표적 조직과 열적으로 커플링되도록 구성되는,
의료 장치. - 제 2 항에 있어서,
상기 열전 냉각기로부터 열을 제거하기 위해서 각각의 열전 냉각기에 열적으로 커플링된 고체 열 전도체를 더 포함하는,
의료 장치. - 제 4 항에 있어서,
상기 각각의 열전 냉각기가, (a) CMUT 어레이의 제 2 측면에 열적으로 커플링된 제 1 측면 및 (b) 층의 제 1 측면의 반대 쪽을 향하고 고체 열 전도체에 열적으로 커플링되는 제 2 측면을 갖는, 층으로 구현되는,
의료 장치. - 제 4 항에 있어서,
상기 고체 열 전도체는 금속을 포함하는,
의료 장치. - 제 1 항에 있어서,
상기 CMUT 어레이를 갖춘 실리콘 기판을 포함하며, 각각의 열전 냉각기는 열 전도성 접착제를 통해 상기 실리콘 기판에 접합되는,
의료 장치. - 제 1 항에 있어서,
비-표적 조직의 특성을 감지하기 위한 하나 이상의 센서를 더 포함하며, 상기 특성은 온도, 압력 및 온도와 압력의 조합으로 이루어진 그룹으로부터 선택되는,
의료 장치. - 고체 상태 냉각기능을 갖춘 초음파 치료용 카테터로서,
표적 조직으로 초음파를 방출하도록 구성된 용량성 미세기계가공 초음파 변환기(CMUT) 어레이,
초음파에 의해 가열된 비-표적 조직을 냉각하도록 구성된 열전 냉각기로서, 초음파 변환기가 카테터의 원위 단부에 배치되는 열전 냉각기, 및
상기 열전 냉각기에 커플링되고 상기 원위 단부로부터 상기 카테터의 근위 단부 쪽으로 멀어지게 카테터를 따라 연장하여 상기 열전 냉각기로부터 멀리 열을 전도시키는 고체 열 전도체를 포함하는,
고체 상태 냉각기능을 갖춘 초음파 치료용 카테터. - 제 9 항에 있어서,
상기 열전 냉각기는 CMUT 어레이와 기계적으로 커플링되는,
고체 상태 냉각기능을 갖춘 초음파 치료용 카테터. - 제 9 항에 있어서,
상기 비-표적 조직의 온도를 감지하기 위한 온도 센서를 더 포함하는,
고체 상태 냉각기능을 갖춘 초음파 치료용 카테터. - 제 9 항에 있어서,
상기 비-표적 조직의 압력을 감지하기 위한 압력 센서를 더 포함하는,
고체 상태 냉각기능을 갖춘 초음파 치료용 카테터. - 제 9 항에 있어서,
상기 카테터는 요도에 삽입되도록 구성되며, 표적 조직은 전립선이고 비-표적 조직은 요도의 벽의 적어도 일부분인,
고체 상태 냉각기능을 갖춘 초음파 치료용 카테터. - 제 13 항에 있어서,
상기 카테터 팁에 CMUT 어레이 및 열전 냉각기를 구현하며, 상기 카테터 팁에 커플링되고 전립선으로부터 요도의 출구에 도달하기 위한 길이를 갖는 카테터 재킷을 더 포함하는,
고체 상태 냉각기능을 갖춘 초음파 치료용 카테터. - 제 14 항에 있어서,
상기 카테터 재킷은 고체 열 전도체에 의해 전도된 열이 요도의 벽을 손상시키는 것을 방지하기 위한 단열 층을 포함하는,
고체 상태 냉각기능을 갖춘 초음파 치료용 카테터. - 제 14 항에 있어서,
상기 카테터 팁 및 카테터 재킷 주위에 배치된 제거 가능한 슬리브를 더 포함하며, 상기 제거 가능한 슬리브는, 상기 제거 가능한 슬리브를 방광에 고정시키기 위한 팽창 가능한 풍선을 포함하고, 적어도 방광으로부터 요도의 출구로 도달하는 길이를 가지며 요도로부터 카테터 팁의 추출 후 한동안 요도에 유지되도록 구성되는,
고체 상태 냉각기능을 갖춘 초음파 치료용 카테터. - 제 16 항에 있어서,
상기 제거 가능한 슬리브는 고체 열 전도체에 의해 전도된 열이 요도의 벽을 손상시키는 것을 방지하기 위한 단열층을 더 포함하는,
고체 상태 냉각기능을 갖춘 초음파 치료용 카테터. - 고체 상태 냉각기능을 갖춘 초음파 치료용 방법으로서,
용량성 미세기계가공 초음파 변환기(CMUT) 어레이에 의해 발생된 초음파에 표적 조직을 노출시키는 단계,
비-표적 조직에 대한 손상을 방지하기 위해서 하나 이상의 열전 냉각기를 사용하여 비-표적 조직을 냉각시키는 단계, 및
하나 이상의 열전 냉각기로부터 그리고 비-표적 조직으로부터 멀리 열을 제거하는 단계를 포함하는,
고체 상태 냉각기능을 갖춘 초음파 치료용 방법. - 제 18 항에 있어서,
노출 단계에서, 신체 채널 내에 초음파를 발생시키는 단계로서, CMUT 어레이가 신체 채널을 통해 카테터의 표적 조직으로 전진되는, 단계;
냉각 단계에서, 하나 이상의 열전 냉각기를 사용하여 신체 채널의 벽을 냉각시키는 단계로서, 상기 하나 이상의 열전 냉각기는 CMUT 어레이와 카테터 중 적어도 하나에 커플링되는, 단계; 및
제거 단계에서, 벽으로부터 열을 제거하는 단계를 포함하는,
고체 상태 냉각기능을 갖춘 초음파 치료용 방법. - 제 19 항에 있어서,
노출 단계에서, 전립선을 요도로부터 초음파에 노출시키는 단계, 및
냉각 단계에서 요도의 벽을 냉각시키는 단계를 포함하는,
고체 상태 냉각기능을 갖춘 초음파 치료용 방법. - 제 19 항에 있어서,
상기 제거 단계는 하나 이상의 열전 냉각기에 커플링되고 카테터를 통해 신체 채널의 출구 쪽으로 연장하는 고체 열 전도체를 통해 하나 이상의 열전 냉각기로부터 멀리 열을 전도시키는 단계를 포함하는,
고체 상태 냉각기능을 갖춘 초음파 치료용 방법. - 제 21 항에 있어서,
상기 제거 단계는 고체 열 전도체를 통해 열의 적어도 일부를 출구 외부로 전도하는 단계를 포함하는,
고체 상태 냉각기능을 갖춘 초음파 치료용 방법. - 제 21 항에 있어서,
상기 제거 단계는 카테터의 적어도 일부분을 가로질러 열을 재분배하는 단계를 포함하는,
고체 상태 냉각기능을 갖춘 초음파 치료용 방법. - 제 18 항에 있어서,
상기 비-표적 조직의 온도를 모니터링하는 단계, 및
노출 단계에서 상기 온도에 따라서 초음파에 대한 표적 조직의 노출을 조정하는 단계를 더 포함하는,
고체 상태 냉각기능을 갖춘 초음파 치료용 방법. - 제 24 항에 있어서,
상기 조정 단계는 상기 온도가 임계 온도를 초과할 때 상기 노출을 적어도 일시적으로 중단시키는 단계를 포함하는,
고체 상태 냉각기능을 갖춘 초음파 치료용 방법. - 제 18 항에 있어서,
상기 비-표적 조직의 압력을 모니터링하는 단계, 및
노출 단계에서 상기 압력에 따라서 초음파에 대한 표적 조직의 노출을 조정하는 단계를 더 포함하는,
고체 상태 냉각기능을 갖춘 초음파 치료용 방법.
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762558200P | 2017-09-13 | 2017-09-13 | |
| US62/558,200 | 2017-09-13 | ||
| US201862654765P | 2018-04-09 | 2018-04-09 | |
| US62/654,765 | 2018-04-09 | ||
| US201862728616P | 2018-09-07 | 2018-09-07 | |
| US62/728,616 | 2018-09-07 | ||
| PCT/US2018/050943 WO2019055699A1 (en) | 2017-09-13 | 2018-09-13 | MEDIUM NETWORK MEDICAL DEVICE AND SOLID-STATE COOLING, AND METHODS AND SYSTEMS THEREOF |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200055732A true KR20200055732A (ko) | 2020-05-21 |
Family
ID=65630262
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207009532A KR20200055732A (ko) | 2017-09-13 | 2018-09-13 | Cmut 어레이 및 고체 상태 냉각기능을 갖춘 의료 장치, 그와 관련된 방법 및 시스템 |
Country Status (11)
| Country | Link |
|---|---|
| US (2) | US11154730B2 (ko) |
| EP (1) | EP3681406A4 (ko) |
| JP (1) | JP7142704B2 (ko) |
| KR (1) | KR20200055732A (ko) |
| CN (1) | CN111372523A (ko) |
| AU (2) | AU2018332980B2 (ko) |
| BR (1) | BR112020004831B1 (ko) |
| CA (1) | CA3083107A1 (ko) |
| MX (1) | MX2020002564A (ko) |
| WO (1) | WO2019055699A1 (ko) |
| ZA (1) | ZA202001288B (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023096020A1 (ko) * | 2021-11-24 | 2023-06-01 | 한국전자기술연구원 | 요역동학검사용 압력센서 어레이 및 그를 포함하는 검사장치 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11959707B2 (en) * | 2019-10-10 | 2024-04-16 | Sunnybrook Research Institute | Systems and methods for cooling ultrasound transducers and ultrasound transducer arrays |
| US11071601B2 (en) | 2019-11-11 | 2021-07-27 | Procept Biorobotics Corporation | Surgical probes for tissue resection with robotic arms |
| US11786760B2 (en) * | 2019-12-10 | 2023-10-17 | GE Precision Healthcare LLC | Multi-beam neuromodulation techniques |
| US11260424B2 (en) | 2020-01-20 | 2022-03-01 | The Board Of Trustees Of The Leland Stanford Junior University | Contoured electrode for capacitive micromachined ultrasonic transducer |
| US11717642B2 (en) | 2020-04-24 | 2023-08-08 | Covidien Lp | Catheter including one or more sensors |
| US11877818B2 (en) | 2020-06-26 | 2024-01-23 | Procept Biorobotics Corporation | Integration of robotic arms with surgical probes |
| US11096753B1 (en) | 2020-06-26 | 2021-08-24 | Procept Biorobotics Corporation | Systems and methods for defining and modifying range of motion of probe used in patient treatment |
| CN113128038B (zh) * | 2021-04-09 | 2022-04-26 | 中国电子科技集团公司第二十九研究所 | 一种蒙皮阵列单元热源过载的智能感知方法 |
| CN113426651A (zh) * | 2021-05-21 | 2021-09-24 | 四川步歌科技有限公司 | 一种超声波电路及其构成的疼痛治疗仪 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5391197A (en) * | 1992-11-13 | 1995-02-21 | Dornier Medical Systems, Inc. | Ultrasound thermotherapy probe |
| US20040002655A1 (en) * | 2002-06-27 | 2004-01-01 | Acuson, A Siemens Company | System and method for improved transducer thermal design using thermo-electric cooling |
| US7314447B2 (en) * | 2002-06-27 | 2008-01-01 | Siemens Medical Solutions Usa, Inc. | System and method for actively cooling transducer assembly electronics |
| FR2849781B1 (fr) | 2003-01-14 | 2005-03-25 | Edap S A | Sonde de therapie |
| US7303530B2 (en) * | 2003-05-22 | 2007-12-04 | Siemens Medical Solutions Usa, Inc. | Transducer arrays with an integrated sensor and methods of use |
| US20060173344A1 (en) * | 2005-01-19 | 2006-08-03 | Siemens Medical Solutions Usa, Inc. | Method for using a refrigeration system to remove waste heat from an ultrasound transducer |
| US20080188755A1 (en) * | 2005-04-25 | 2008-08-07 | Koninklijke Philips Electronics, N.V. | Ultrasound Transducer Assembly Having Improved Thermal Management |
| JP5204116B2 (ja) * | 2006-11-03 | 2013-06-05 | リサーチ・トライアングル・インスティチュート | 撓みモードの圧電性変換器を用いる増強された超音波画像診断用プローブ |
| CN102348480B (zh) | 2009-03-02 | 2015-02-25 | 皇家飞利浦电子股份有限公司 | 用于前列腺治疗的尿道超声探针 |
| US20110077558A1 (en) * | 2009-09-29 | 2011-03-31 | Boston Scientific Scimed, Inc. | Ultrasound endoscopic system |
| US9028417B2 (en) * | 2010-10-18 | 2015-05-12 | CardioSonic Ltd. | Ultrasound emission element |
| US20120095371A1 (en) * | 2010-10-18 | 2012-04-19 | CardioSonic Ltd. | Ultrasound transducer and cooling thereof |
| US9566456B2 (en) * | 2010-10-18 | 2017-02-14 | CardioSonic Ltd. | Ultrasound transceiver and cooling thereof |
| EP2455133A1 (en) * | 2010-11-18 | 2012-05-23 | Koninklijke Philips Electronics N.V. | Catheter comprising capacitive micromachined ultrasonic transducers with an adjustable focus |
| WO2012120495A2 (en) * | 2011-03-04 | 2012-09-13 | Rainbow Medical Ltd. | Tissue treatment and monitoring by application of energy |
| WO2013044166A1 (en) | 2011-09-23 | 2013-03-28 | Schwartz Alan N | Non-invasive and minimally invasive and tightly targeted minimally invasive therapy methods and devices for parathyroid treatment |
| US9707414B2 (en) * | 2012-02-14 | 2017-07-18 | Rainbow Medical Ltd. | Reflectance-facilitated ultrasound treatment and monitoring |
| KR102086184B1 (ko) * | 2012-02-27 | 2020-03-06 | 프랙틸 래브러토리스 인코포레이티드 | 조직의 치료를 위한 열 절제 시스템,장치 및 방법 |
| US20130296743A1 (en) * | 2012-05-02 | 2013-11-07 | Siemens Medical Solutions Usa, Inc. | Ultrasound for Therapy Control or Monitoring |
| US20140257262A1 (en) * | 2013-03-11 | 2014-09-11 | Alexandre Carpentier | Interstitial ultrasonic disposable applicator and method for tissue thermal conformal volume ablation and monitoring the same |
| US20150289750A1 (en) * | 2014-04-11 | 2015-10-15 | Jeremy Stigall | Imaging and treatment device |
| JP7118053B2 (ja) * | 2016-09-29 | 2022-08-15 | コーニンクレッカ フィリップス エヌ ヴェ | カテーテルアセンブリのためのプルワイヤクラウン及びクラウンスリーブ |
| EP3672491B1 (en) * | 2017-08-22 | 2020-11-11 | Koninklijke Philips N.V. | Adjustable flexibility/stiffness intraluminal device |
-
2018
- 2018-09-13 AU AU2018332980A patent/AU2018332980B2/en active Active
- 2018-09-13 CN CN201880073516.5A patent/CN111372523A/zh active Pending
- 2018-09-13 WO PCT/US2018/050943 patent/WO2019055699A1/en unknown
- 2018-09-13 CA CA3083107A patent/CA3083107A1/en active Pending
- 2018-09-13 JP JP2020536917A patent/JP7142704B2/ja active Active
- 2018-09-13 BR BR112020004831-3A patent/BR112020004831B1/pt active IP Right Grant
- 2018-09-13 US US16/130,896 patent/US11154730B2/en active Active
- 2018-09-13 EP EP18855671.6A patent/EP3681406A4/en active Pending
- 2018-09-13 KR KR1020207009532A patent/KR20200055732A/ko not_active Application Discontinuation
- 2018-09-13 MX MX2020002564A patent/MX2020002564A/es unknown
-
2020
- 2020-02-28 ZA ZA2020/01288A patent/ZA202001288B/en unknown
-
2021
- 2021-09-20 US US17/479,011 patent/US20220072338A1/en active Pending
-
2023
- 2023-10-31 AU AU2023258347A patent/AU2023258347A1/en active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023096020A1 (ko) * | 2021-11-24 | 2023-06-01 | 한국전자기술연구원 | 요역동학검사용 압력센서 어레이 및 그를 포함하는 검사장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020533157A (ja) | 2020-11-19 |
| BR112020004831B1 (pt) | 2022-09-20 |
| AU2018332980B2 (en) | 2023-08-03 |
| WO2019055699A1 (en) | 2019-03-21 |
| CA3083107A1 (en) | 2019-03-21 |
| US20190076674A1 (en) | 2019-03-14 |
| EP3681406A1 (en) | 2020-07-22 |
| US20220072338A1 (en) | 2022-03-10 |
| CN111372523A (zh) | 2020-07-03 |
| JP7142704B2 (ja) | 2022-09-27 |
| AU2018332980A1 (en) | 2020-04-02 |
| US11154730B2 (en) | 2021-10-26 |
| AU2023258347A1 (en) | 2023-11-23 |
| ZA202001288B (en) | 2022-09-28 |
| MX2020002564A (es) | 2020-09-03 |
| BR112020004831A2 (pt) | 2020-09-15 |
| EP3681406A4 (en) | 2021-06-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7142704B2 (ja) | Cmutアレイおよび固体冷却を備えた医療装置、並びに関連する方法およびシステム | |
| US5620479A (en) | Method and apparatus for thermal therapy of tumors | |
| US8989838B2 (en) | System for treatment of diseased tissue using controlled ultrasonic heating | |
| US6740108B1 (en) | Thermal treatment catheter having preferential asymmetrical heating pattern | |
| JP3490438B2 (ja) | 超音波による組織の治療装置 | |
| US8801701B2 (en) | Method and apparatus for obtaining quantitative temperature measurements in prostate and other tissue undergoing thermal therapy treatment | |
| US5344435A (en) | Urethral inserted applicator prostate hyperthermia | |
| CN102170938B (zh) | 用于超声治疗处置的系统和方法 | |
| JPH11332872A (ja) | 高分解能凍結手術方法および装置 | |
| CN110494093B (zh) | 基于支气管镜的微波消融系统和方法 | |
| JP2004503324A (ja) | 膨張性環状レンズによるエネルギー付与装置 | |
| KR20130094695A (ko) | Hifu를 사용하여 자궁 섬유종 또는 다른 조직을 치료하기 위한 오피스-기반 시스템 | |
| KR20060020656A (ko) | 중심 개구부를 가지는 초음파 탐침 | |
| JP3904241B2 (ja) | 腫瘍の温熱治療用カテーテル | |
| Diederich et al. | Combination of transurethral and interstitial ultrasound applicators for high-temperature prostate thermal therapy | |
| Deardorff et al. | Control of interstitial thermal coagulation: comparative evaluation of microwave and ultrasound applicators | |
| US10772655B2 (en) | Ultrasound ablation device | |
| Deardorff et al. | Angular directivity of thermal coagulation using air-cooled direct-coupled interstitial ultrasound applicators | |
| JP4044182B2 (ja) | 超音波治療装置 | |
| JP4481600B2 (ja) | エネルギー治療装置 | |
| JPH0428377A (ja) | 温熱治療用プローブ | |
| KR101808832B1 (ko) | Hifu를 이용한 초음파 치료 장치 및 그 제어 방법 | |
| Diederich | Endocavity and catheter-based ultrasound devices | |
| JP2005040300A (ja) | エネルギー治療装置 | |
| Diederich et al. | Catheter‐Based Ultrasound Applicators for Selective Prostate Ablation With MR‐Guidance |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E902 | Notification of reason for refusal |