KR20180098432A - 웨이퍼 이송용 atm 로봇의 블레이드 변형 감시 장치의 감시 방법 - Google Patents
웨이퍼 이송용 atm 로봇의 블레이드 변형 감시 장치의 감시 방법 Download PDFInfo
- Publication number
- KR20180098432A KR20180098432A KR1020170024670A KR20170024670A KR20180098432A KR 20180098432 A KR20180098432 A KR 20180098432A KR 1020170024670 A KR1020170024670 A KR 1020170024670A KR 20170024670 A KR20170024670 A KR 20170024670A KR 20180098432 A KR20180098432 A KR 20180098432A
- Authority
- KR
- South Korea
- Prior art keywords
- blade
- mark
- deformation
- generated
- robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images





Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
-
- H10P72/06—
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67742—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68707—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a robot blade, or gripped by a gripper for conveyance
-
- H10P72/3302—
-
- H10P72/7602—
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Robotics (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
Description
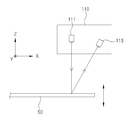
도 2는 본 발명에 따른 ATM 로봇의 블레이드 변형 감시 장치의 감시 방법을 갖는 감시 장치의 센서부를 나타내는 도면이다.
도 3은 본 발명에 따른 ATM 로봇의 블레이드 상에 형성되는 마크를 나타내는 도면이다.
도 4a 및 도 4b는 본 발명에 따른 블레이드의 이동 영역에 따른 ATM 로봇의 블레이드 변형을 감지하는 모습을 개략적으로 나타내는 도면이다.
도 5는 본 발명에 따른 ATM 로봇의 블레이드 변형 감시 장치의 감시 방법을 나타내는 순서도이다.

100: ATM 로봇의 블레이드 변형 감시 장치
110: 센서부 111: 레이저 다이오드(Laser diode)
113: 촬상 카메라 120: 통신 인터페이스
130: 증폭기 140: 측정부
150: 산출부 160: 평가부
170: 중앙제어부 180: 콘트롤러
200: EFEM(Equipment front end module) 설비
Claims (6)
- EFEM(Equipment front end module) 설비에 웨이퍼를 로딩 및 언로딩하는 ATM(Atmosphere) 로봇의 블레이드 변형 감시 장치의 감시 방법으로서,
(a) 센서부가 광원으로부터 빛을 조사하여 상기 블레이드 상에 반사광으로 나타나는 적어도 하나 이상의 마크가 생성되는 단계;
(b) 측정부가 상기 블레이드의 초기 구동시에 상기 블레이드에 생성된 마크의 위치에 대한 제1 화상 좌표를 측정하여 위치 기준점이 생성되고, 상기 블레이드의 초기 구동 이후에 상기 블레이드에 생성된 마크의 위치에 대한 제2 화상 좌표를 측정하여 좌표 데이터가 생성되는 단계;
(c) 산출부가 상기 마크의 위치에 대한 좌표 데이터를 토대로 상기 제1 화상 좌표와 제2 화상 좌표 사이에 발생되는 오차를 계산하는 단계; 및
(d) 평가부가 상기 좌표 데이터 사이에 발생되는 오차와 미리 설정된 상기 블레이드의 변형 허용 범위를 상호 비교하여 변형 유무를 판별하는 단계;
를 포함하는 것을 특징으로 하는 웨이퍼 이송용 ATM 로봇의 블레이드 변형 감시 장치의 감시 방법.
- 제 1 항에 있어서,
상기 마크는 상기 블레이드 상에 적어도 둘 이상으로 형성되되,
상기 블레이드의 변형에 대응되는 상기 각 마크에 대한 화상 좌표의 변화를 통해 상기 블레이드의 변형에 의한 분진 발생을 감지하는 것을 특징으로 하는 웨이퍼 이송용 ATM 로봇의 블레이드 변형 감시 장치의 감시 방법.
- 제 2 항에 있어서,
상기 각 마크에 대한 화상 좌표는 마크의 밝기 및 형상 중 적어도 어느 하나로 생성되는 것을 특징으로 하는 웨이퍼 이송용 ATM 로봇의 블레이드 변형 감시 장치의 감시 방법.
- 제 1 항에 있어서,
상기 (c) 단계에서, 상기 블레이드의 변형 허용 범위는 상기 블레이드가 웨이퍼를 로딩할 수 있는 최저 높이인 것을 특징으로 하는 웨이퍼 이송용 ATM 로봇의 블레이드 변형 감시 장치의 감시 방법.
- 제 1 항에 있어서,
상기 (d) 단계에서, 상기 마크의 위치에 대한 좌표 데이터 사이에 발생되는 오차가 설정된 상기 블레이드의 변형 허용 범위를 벗어난 경우, 외부에서 인지되도록 알림을 발생시키는 것을 특징으로 하는 웨이퍼 이송용 ATM 로봇의 블레이드 변형 감시 장치의 감시 방법.
- 웨이퍼 이송용 ATM 로봇의 블레이드 변형 감시 장치에 있어서,
EFEM 설비 내에 구비되되, 빛을 조사하여 상기 블레이드 상에 반사광으로 나타나는 적어도 하나 이상의 마크를 생성시키기 위한 레이저 다이오드 및 상기 블레이드 상의 마크를 촬상하여 상기 마크의 화상 좌표를 생성하기 위한 촬상 카메라를 포함하는 센서부; 및
상기 센서부와 상호 연계되어 신호를 주고 받는 것으로, 상기 블레이드의 초기 구동시에 제1 화상 좌표를 측정하여 상기 마크의 위치 기준점을 미리 생성하고, 상기 블레이드의 초기 구동 이후에 상기 마크의 위치에 대한 제2 화상 좌표를 측정하여 좌표 데이터로 생성시키는 측정부와, 상기 마크의 위치에 대한 좌표 데이터를 토대로 상기 제1 화상 좌표와 제2 화상 좌표 사이에 발생되는 오차를 계산하는 산출부 및, 상기 좌표 데이터 사이에 발생되는 오차와 미리 설정된 상기 블레이드의 변형 허용 범위를 상호 비교하여 변형 유무를 판별하는 평가부를 포함하는 중앙제어부;
를 포함하는 것을 특징으로 하는 웨이퍼 이송용 ATM 로봇의 블레이드 변형 감시 장치.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020170024670A KR20180098432A (ko) | 2017-02-24 | 2017-02-24 | 웨이퍼 이송용 atm 로봇의 블레이드 변형 감시 장치의 감시 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020170024670A KR20180098432A (ko) | 2017-02-24 | 2017-02-24 | 웨이퍼 이송용 atm 로봇의 블레이드 변형 감시 장치의 감시 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20180098432A true KR20180098432A (ko) | 2018-09-04 |
Family
ID=63598259
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020170024670A Ceased KR20180098432A (ko) | 2017-02-24 | 2017-02-24 | 웨이퍼 이송용 atm 로봇의 블레이드 변형 감시 장치의 감시 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20180098432A (ko) |
-
2017
- 2017-02-24 KR KR1020170024670A patent/KR20180098432A/ko not_active Ceased
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3618980B1 (en) | Methods and systems for improved quality inspection of products using a robot | |
| KR102172266B1 (ko) | 기판 반송 핸드의 진단 시스템 | |
| US11837484B2 (en) | Robot arm device and method for transferring wafer | |
| US20250149362A1 (en) | Wafer processing systems, wafer transport devices, and related methods | |
| US20220333922A1 (en) | Deterioration determination apparatus, deterioration determination method, and computer-readable storage medium storing a control program | |
| JP2013515959A (ja) | カメラのミスキャリブレーションの実行時決定のためのシステムと方法 | |
| US20100234992A1 (en) | Semiconductor wafer robot alignment system and method | |
| CN105514010A (zh) | 一种硅片安全运输方法 | |
| US20030128024A1 (en) | Apparatus for recognizing working position of device transfer system in semiconductor device test handler and method thereof | |
| CN105470178B (zh) | 优化硅片承载装置维护周期的方法 | |
| CN117080139B (zh) | 基于真空吸附技术的晶圆传送控制方法及传送控制系统 | |
| JP6424560B2 (ja) | 異常原因推定装置、ピッキング装置及びピッキング装置における異常原因推定方法 | |
| CN118571773A (zh) | 晶圆状态检测方法、装置、设备和介质 | |
| CN120521489A (zh) | 一种飞机发动机叶片检测方法、系统及设备 | |
| KR20180098432A (ko) | 웨이퍼 이송용 atm 로봇의 블레이드 변형 감시 장치의 감시 방법 | |
| US20080204764A1 (en) | Lead terminal inspection method and lead terminal inspection apparatus | |
| CN118608316A (zh) | 一种基于人工智能的半导体器件图像数据检测系统及方法 | |
| US12269694B2 (en) | Controller | |
| KR101952840B1 (ko) | 웨이퍼 이송장비 암블레이드의 열화추세 검출 시스템 및 그 검출 방법 | |
| KR101089593B1 (ko) | 척의 기구적 강성을 보완한 웨이퍼 프로버 스테이션 및 그 제어방법 | |
| US20240238973A1 (en) | Tool check device, tool check program, and tool check method for robot arm | |
| CN111906043B (zh) | 位姿检测方法及系统 | |
| US20210285999A1 (en) | Electronic component handling apparatus and electronic component testing apparatus | |
| KR102573339B1 (ko) | 반도체 소자 픽업 장치 및 이의 동작 제어 방법 | |
| CN115958586A (zh) | 元器件的异常监测方法、电子设备及存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |