KR20170129571A - 로봇 청소기 - Google Patents
로봇 청소기 Download PDFInfo
- Publication number
- KR20170129571A KR20170129571A KR1020160060444A KR20160060444A KR20170129571A KR 20170129571 A KR20170129571 A KR 20170129571A KR 1020160060444 A KR1020160060444 A KR 1020160060444A KR 20160060444 A KR20160060444 A KR 20160060444A KR 20170129571 A KR20170129571 A KR 20170129571A
- Authority
- KR
- South Korea
- Prior art keywords
- pattern
- unit
- light
- image
- main body
- Prior art date
Links
- 230000001678 irradiating effect Effects 0.000 claims abstract description 86
- 238000004140 cleaning Methods 0.000 claims abstract description 25
- 238000000034 method Methods 0.000 claims description 24
- 238000001514 detection method Methods 0.000 claims description 22
- 239000000126 substance Substances 0.000 claims description 7
- 230000004888 barrier function Effects 0.000 abstract 2
- 230000003287 optical effect Effects 0.000 description 5
- 239000000428 dust Substances 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000013500 data storage Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images









Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2836—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means characterised by the parts which are controlled
- A47L9/2852—Elements for displacement of the vacuum cleaner or the accessories therefor, e.g. wheels, casters or nozzles
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/008—Manipulators for service tasks
- B25J11/0085—Cleaning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/021—Optical sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/021—Optical sensing devices
- B25J19/023—Optical sensing devices including video camera means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0003—Home robots, i.e. small robots for domestic use
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1664—Programme controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/04—Automatic control of the travelling movement; Automatic obstacle detection
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2201/00—Application
- G05D2201/02—Control of position of land vehicles
- G05D2201/0215—Vacuum cleaner
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Multimedia (AREA)
- Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Electromagnetism (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Electric Vacuum Cleaner (AREA)
Abstract
본 발명의 로봇 청소기는 본체의 전방의 청소구역 내 바닥을 향해 제 1 패턴의 광을 조사하는 제 1 패턴 조사부와, 상기 본체 전방으로 상향으로 제 2 패턴의 광을 조사하는 제 2 패턴 조사부를 포함하고, 상기 제 1 패턴 조사부와 상기 제 2 패턴 조사부에 의해 조사된 각 패턴의 광이 장애물에 입사된 영상을 영상 획득부를 통해 획득하고, 이렇게 획득된 영상을 통해 청소구역 내 장애물 상황에 대한 다양한 정보를 파악할 수 있다.
Description
본 발명은 로봇 청소기에 관한 것이다.
일반적으로 로봇 청소기는 사용자의 조작 없이도 청소하고자 하는 구역내를 스스로 주행하면서 바닥면으로부터 먼지 등의 이물질을 흡입하여 자동으로 청소하는 기기이다.
통상 이러한 로봇 청소기는 청소구역 내에 설치된 가구나 사무용품, 벽 등의 장애물까지의 거리를 감지하고, 그에 따라 청소구역을 매핑(mapping)하거나, 좌륜과 우륜의 구동을 제어하여 장애물 회피 동작을 수행한다. 종래에는 천장 또는 바닥을 주시하는 센서를 통해 로봇 청소기가 이동한 거리를 계측하고, 이를 기반으로 장애물까지의 거리를 산출하는 방식이었으나, 로봇 청소기의 이동 거리를 기반으로 장애물까지의 거리를 추정하는 간접적인 방식이기 때문에, 바닥의 굴곡등으로 로봇 청소기의 이동 거리가 정확하게 계측되지 못하는 경우, 장애물까지의 거리 역시 오차를 가질 수밖에 없었다. 특히, 이러한 로봇 청소기에 주로 사용되는 거리 측정 방식은 적외선 또는 초음파를 이용한 것으로, 광 또는 음이 장애물에 의해 산란되는 양이 많아 거리 계측에 상당한 오차가 발생되는 문제가 있었다.
최근에는 로봇 청소기의 전방으로 특정한 패턴의 광을 조사하여 이를 촬영하고, 촬영된 영상으로부터 상기 패턴을 추출하고, 이를 바탕으로 청소구역 내의 장애물 상황을 파악하여 주행을 제어하는 기술이 적용되고 있다. 예를 들어, 한국공개특허 10-2013-0141979호(이하, '979 발명이라 함.)는 십자 패턴의 광을 조사하는 광원모듈과 청소기 전방의 영상을 획득하는 카메라 모듈을 구비한 로봇 청소기
를 개시하고 있다. 이러한 로봇 청소기는 카메라 모듈을 통해 획득된 영상으로부터 패턴을 추출하고, 이를 바탕으로 청소구역 내의 장애물 상황을 파악하고 있다. 그런데, 이러한 로봇 청소기의 경우, 상기 광원모듈은 일정한 각도로 광을 조사하도록 구성되고, 하나만 구비되기 때문에, 장애물을 감지할 수 있는 범위에 제약이 따르고, 높이를 갖는 장애물의 입체적인 형태를 파악하는데도 어려움이 있었다. 특히, '979 발명은 십자 패턴이 청소구역의 바닥을 향해 조사되는 특성상, 상기 광원 모듈보다 높이 위치한 장애물 또는 바닥으로부터의 높이가 상기 광원 모듈부터 높은 곳까지 이르는 장애물을 감지할 수는 없다.
'979 발명은 상기 카메라 모듈로부터 출사된 수직선 형태의 광이 장애물에 입사되는 경우, 상기 장애물의 높이를 어느 정도 가늠해 볼 수는 있으나, 이로부터 알 수 있는 장애물 정보는 어디까지나 수직선 패턴이 조사된 부분에 한정된 것이었다.
또한, 침대와 같은 장애물의 경우는, 침대 다리에 매트리스가 거치되기 때문에, 상기 매트리스 아래로 소정의 공간이 형성되기 마련인데, 침대로부터 로봇 청소기의 위치에 따라서는, 상기 광원모듈로부터 조사된 십자 패턴의 광 모두가 상기 공간 내의 바닥으로 조사되어, 로봇 청소기의 제어 유닛은 상기 매트리스를 식별해 내지 못하고, 따라서, 로봇 청소기가 침대가 있는 쪽으로 계속하여 주행되도록 제어할 수 있다. 이 경우, 상기 공간의 높이에 따라서는 로봇 청소기가 상기 공간 내로 진입하지 못하고, 매트리스를 지지하는 프레임 등의 구조물과 충돌하거나, 바닥과 프레임 사이에 끼게 되어 더 이상 주행하지 못하게 되는 문제가 있었다.
본 발명이 해결하고자 하는 과제는 첫째, 상하로 배치된 두 개의 패턴 조사부로부터 조사된 패턴들을 이용하여 장애물에 대한 보다 구체적인 정보를 획득할 수 있는 로봇 청소기를 제공하는 것이다.
둘째, 침대와 같이 청소 구역의 바닥과의 사이에 소정 높이의 공간을 형성하는 장애물이 존재하는 경우, 주행 중에 상기 공간에 끼이는 것을 방지할 수 있는 로봇 청소기를 제공하는 것이다.
셋째, 제 1 패턴 조사부와 제 2 패턴 조사부의 칼리브레이션 과정을 보다 쉽게 실시할 수 있는 로봇 청소기를 제공하는 것이다.
본 발명이 일 실시예에 따른 로봇 청소기는 본체의 전면에 상하로 제 1 패턴 조사부와 제 2 패턴 조사부가 배치되고, 상기 제 1 패턴 조사부는 상기 본체의 전방을 향해 하측으로 제 1 패턴의 광을 조사하고, 상기 제 2 패턴 조사부는 상기 본체의 전방을 향해 상측으로 제 2 패턴의 광을 조사한다. 상기 본체의 전면에는 전방의 영상을 획득하는 영상 획득부가 구비되어, 상기 제 1 패턴의 광과 상기 제 2 패턴의 광이 입사된 영역의 영상을 획득한다.
로봇 청소기의 전방에 장애물이 존재하지 않는 경우, 상기 제 1 패턴의 광은 청소구역의 바닥에 입사되나, 상기 패턴 광들이 조사되는 영역 내에 장애물이 위치하는 경우에는 상기 장애물의 하부에는 상기 제 1 패턴의 광이 입사되고, 상기 장애물의 상부에는 상기 제 2 패턴의 광이 입사되기 때문에, 상기 영상 획득부를 통해 획득한 영상에서 상기 장애물에 맺힌 광 패턴의 위치, 형상, 길이 등의 정보로부터 장애물의 입체적인 형태를 파악할 수 있다.
특히, 상기 제 1 패턴의 광이 청소구역의 바닥에 입사된 경우에도, 상기 제 2 패턴의 광이 장애물에 입사된 경우에는, 침대와 같이 청소구역의 바닥 상측으로 소정의 공간을 형성하는 장애물이 존재한다는 것이 추정될 수 있고, 따라서, 이 경우에는 상기 영상 획득부에 의해 획득된 영상에서의 상기 제 2 패턴의 광의 상의 위치로부터 상기 공간의 높이를 파악하여, 상기 공간의 높이가 상기 로봇 청소기의 본체의 높이 보다 낮은 경우에는 장애물에 대한 회피 주행을 실시하도록 제어될 수 있다.
바람직하게는, 상기 영상 획득부는 상기 제 상기 제 1 패턴 조사부와 상기 제 2 패턴 조사부 사이에 배치될 수 있다. 또한, 상기 제 1 패턴 조사부, 상기 영상 획득부 및 상기 제 2 패턴 조사부는 일렬로 배치될 수 있고, 상기 제 1 패턴 조사부와 상기 제 2 패턴 조사부는 상기 영상 획득부에 대해 대칭으로 배치될 수 있다. 더 나아가, 상기 제 1 패턴 조사부와 상기 제 2 패턴 조사부가 동일한 크기의 수직 조사각으로 광을 조사하도록 구성되는 경우 상기 제 1 패턴 조사부와 상기 제 2 패턴 조사부의 위치를 뒤바꾼 경우에도 각 패턴 조사부로부터 조사되는 광의 방향은 같기 때문에, 상기 제 1 패턴 조사부와 상기 제 2 패턴 조사부의 칼리브레이션이 동일한 방식으로 이루어질 수 있다.
제 1 패턴 조사부 또는 제 2 패턴 조사부는 20˚ 내지 30˚의 수직 조사각으로 광을 조사할 수 있으며, 상기 영상 획득부는 렌즈의 주축이 수평으로 정렬되고, 100˚ 내지 110˚의 화각을 가질 수 있다. 그리고, 상기 영상 획득부는 상기 바닥에 대한 영상을 상기 본체로부터 거리가 110mm 내지 120mm 이상인 위치부터 획득하도록 구성될 수 있다.
상기 제 1 패턴의 광과 상기 제 2 패턴의 광은 서로 다른 패턴으로 구성될 수 있으며, 상기 제 1 패턴은 광은 수평선과 상기 수평선과 직교하는 수직선을 포함하는 패턴으로 구성되고, 상기 제 2 패턴은 상기 제 2 패턴의 광은 수평선을 포함하는 패턴으로 구성될 수 있다.
본 발명의 다른 실시예에 따른 로봇 청소기는 외관을 형성하는 케이싱과, 상기 케이싱에 회전 가능하게 구비되는 좌륜 및 우륜과, 상기 케이싱에 배치되어 청소구역 내 바닥의 이물질을 흡입하는 흡입 모듈과, 상기 케이싱의 전면에 배치되는 장애물 감지유닛을 포함할 수 있다. 여기서, 상기 장애물 감지유닛은 상기 케이싱의 전면에 결합되는 모듈 프레임을 포함할 수 있고, 상기 모듈 프레임에 상기 제 1 패턴 조사부와 상기 제 2 패턴 조사부와, 상기 영상 획득부가 배치될 수 있다.
바람직하게는, 상기 영상 획득부가 상기 제 1 패턴 조사부와 상기 제 2 패턴 조사부 사이에 배치될 수 있다.
본 발명의 로봇 청소기는 상하로 배치된 두 개의 패턴 조사부로부터 조사된 패턴들을 이용하여 장애물에 대한 보다 구체적인 정보를 획득할 수 있으며, 특히, 애물의 입체적인 형상을 보다 정확하게 파악할 수 있는 효과가 있다.
또한, 침대와 같이 청소 구역의 바닥과의 사이에 소정 높이의 공간을 형성하는 장애물을 파악하고, 상기 공간의 높이에 따라 로봇 청소기의 주행을 제어함으로써, 로봇 청소기가 주행 중에 상기 공간에 끼이는 것을 방지할 수 있는 효과가 있다.
또한, 동일한 크기의 수직 조사각으로 광으로 조사하는 제 1 패턴 조사부와 제 2 패턴 조사부를 영상 획득부에 대해 대칭으로 배치함으로써, 상기 제 1 패턴 조사부와 상기 제 2 패턴 조사부의 칼리브레이션 과정을 보다 쉽게 실시할 수 있는 효과가 있다.
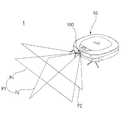
도 1은 본 발명의 일 실시예에 따른 로봇 청소기의 사시도이다.
도 2는 도 1의 로봇 청소기의 수평 화각을 도시한 것이다.
도 3은 도 1의 로봇 청소기의 전면도이다.
도 4는 도 1의 로봇 청소기의 저면을 도시한 것이다.
도 5는 도 1의 로봇 청소기의 주요부들을 도시한 블록도이다.
도 6은 장애물 감지유닛의 전면도(a)와 측면도(b)이다.
도 7은 장애물 탐지 모듈의 조사 범위와 장애물 탐지 범위를 도시한 것이다.
도 8은 제 1 패턴 조사부를 칼리브레이션하는 과정에서 획득영상에 표시된 제 1 패턴 광을 도시한 것(a)과, 제 2 패턴 조사부를 칼리브레이션하는 과정에서 획득영상에 표시된 제 2 패턴 광을 도시한 것(b)이다.
도 9는 로봇 청소기가 제 1 위치에 있을 시, 전방에 장애물이 위치한 경우에 있어서의 획득영상을 도시한 것(a), 로봇 청소기의 위치가 변경되어 제 2 위치에 있을 시의 획득영상을 도시한 것(b)이다.
도 10은 장애물에 제 1 패턴 광과 제 2 패턴 광이 입사된 경우에 있어서의 획득영상을 도시한 것이다.
도 2는 도 1의 로봇 청소기의 수평 화각을 도시한 것이다.
도 3은 도 1의 로봇 청소기의 전면도이다.
도 4는 도 1의 로봇 청소기의 저면을 도시한 것이다.
도 5는 도 1의 로봇 청소기의 주요부들을 도시한 블록도이다.
도 6은 장애물 감지유닛의 전면도(a)와 측면도(b)이다.
도 7은 장애물 탐지 모듈의 조사 범위와 장애물 탐지 범위를 도시한 것이다.
도 8은 제 1 패턴 조사부를 칼리브레이션하는 과정에서 획득영상에 표시된 제 1 패턴 광을 도시한 것(a)과, 제 2 패턴 조사부를 칼리브레이션하는 과정에서 획득영상에 표시된 제 2 패턴 광을 도시한 것(b)이다.
도 9는 로봇 청소기가 제 1 위치에 있을 시, 전방에 장애물이 위치한 경우에 있어서의 획득영상을 도시한 것(a), 로봇 청소기의 위치가 변경되어 제 2 위치에 있을 시의 획득영상을 도시한 것(b)이다.
도 10은 장애물에 제 1 패턴 광과 제 2 패턴 광이 입사된 경우에 있어서의 획득영상을 도시한 것이다.
본 발명의 이점 및 특징, 그리고 그것들을 달성하는 방법은 첨부되는 도면과 함께 상세하게 후술되어 있는 실시예들을 참조하면 명확해질 것이다. 그러나 본 발명은 이하에서 개시되는 실시예들에 한정되는 것이 아니라 서로 다른 다양한 형태로 구현될 수 있으며, 단지 본 실시예들은 본 발명의 개시가 완전하도록 하고, 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 발명의 범주를 완전하게 알려주기 위해 제공되는 것이며, 본 발명은 청구항의 범주에 의해 정의될 뿐이다. 명세서 전체에 걸쳐 동일 참조 부호는 동일 구성 요소를 지칭한다.
도 1은 본 발명의 일 실시예에 따른 로봇 청소기의 사시도이다. 도 2는 도 1의 로봇 청소기의 수평 화각을 도시한 것이다. 도 3은 도 1의 로봇 청소기의 전면도이다. 도 4는 도 1의 로봇 청소기의 저면을 도시한 것이다. 도 5는 도 1의 로봇 청소기의 주요부들을 도시한 블록도이다. 도 6은 장애물 감지유닛의 전면도(a)와 측면도(b)이다. 도 7은 장애물 탐지 모듈의 조사 범위와 장애물 탐지 범위를 도시한 것이다.
도 1 내지 도 7를 참조하면, 본 발명의 일 실시예에 따른 로봇 청소기(1)는 청소구역의 바닥을 따라 이동하며, 상기 바닥 상의 먼지 등의 이물질을 흡입하는 본체(10)와, 본체(10)의 전면에 배치되는 장애물 감지유닛(100)을 포함할 수 있다.
본체(10)는 외관을 형성하며 내측으로 본체(10)를 구성하는 부품들이 수납되는 공간을 형성하는 케이싱(11)과, 케이싱(11)에 배치되어 먼지나 쓰레기 등의 이물질을 흡입하는 흡입유닛(34)과, 케이싱(11)에 회전 가능하게 구비되는 좌륜(36(L))과 우륜(36(R))을 포함할 수 있다. 좌륜(36(L))과 우륜(36(R))이 회전함에 따라 본체(10)가 청소구역의 바닥을 따라 이동되며, 이 과정에서 흡입유닛(34)을 통해 이물질이 흡입된다.
흡입유닛(34)은 흡입력을 발생시키는 흡입 팬(미도시)과, 상기 흡입 팬의 회전에 의해 생성된 기류가 흡입되는 흡입구(10h)를 포함할 수 있다. 흡입유닛(34)은 흡입구(10h)를 통해 흡입된 기류 중에서 이물질을 채집하는 필터(미도시)와, 상기 필터에 의해 채집된 이물질들이 축적되는 이물질 채집통(미도시)을 포함할 수 있다.
또한, 본체(10)는 좌륜(36(L))과 우륜(36(R))을 구동시키는 주행 구동부(300)를 포함할 수 있다. 주행 구동부(300)는 적어도 하나의 구동모터를 포함할 수 있다. 상기 적어도 하나의 구동모터는 좌륜(36(L)))을 회전시키는 좌륜 구동모터와 우륜(36(R))을 회전시키는 우륜 구동모터를 포함할 수 있다.
제어부(200)는 주행 구동부(300)를 제어하는 주행제어모듈(230)을 포함할 수 있다. 주행제어모듈(230)에 의해 상기 좌류 구동모터와 상기 우륜 구동모터의 작동이 독립적으로 제어됨으로써 본체(10)의 직진, 후진 또는 선회가 이루어 질 수 있다. 예를들어, 본체(10)가 직진 주행하는 경우에는 상기 좌륜 구동모터와 상기 우륜 구동모터가 같은 방향으로 회전되나, 상기 좌륜 구동모터와 상기 우륜 구동모터가 다른 속도로 회전되거나, 서로 반대 방향으로 회전되는 경우에는 본체(10)의 주행 방향이 전환될 수 있다. 본체(10)의 안정적인 지지를 위한 적어도 하나의 보조륜(37)이 더 구비될 수 있다.
케이싱(11)의 저면부 전방측에 위치하며, 방사상으로 연장된 다수개의 날개로 이루어진 솔을 갖는 브러시(35)가 더 구비될 수 있다. 브러시들(35)의 회전에 의해 청소구역의 바닥으로부터 먼지들이 제거되며, 이렇게 바닥으로부터 분리된 먼지들은 흡입구(10h)를 통해 흡입되어 채집통에 모인다.
케이싱(11)의 상면에는 사용자로부터 로봇 청소기(1)의 제어를 위한 각종 명령을 입력받는 컨트롤 패널(39)이 구비될 수 있다.
본체(10)에는 재충전이 가능한 베터리(38)가 구비되며, 베터리(38)의 충전 단자(33)가 상용 전원(예를 들어, 가정 내의 전원 콘센트)과 연결되거나, 상용 전원과 연결된 별도의 충전대(미도시)에 본체(10)가 도킹되어, 충전 단자(33)가 상용 전원과 전기적으로 연결되고, 베터리(38)의 충전이 이루어질 수 있다. 로봇 청소기(1)를 구성하는 전장 부품들은 베터리(38)로부터 전원을 공급받을 수 있으며, 따라서, 베터리(38)가 충전된 상태에서 로봇 청소기(1)는 상용 전원과 전기적으로 분리된 상태에서 자력 주행이 가능하다.
장애물 감지유닛(100)은 본체(10)의 전면에 배치될 수 있다. 보다 상세하게, 도 6을 참조하면, 장애물 감지유닛(100)은 케이싱(11)의 전면에 고정되고, 상하로 길게 형성된 모듈 프레임(110)과, 모듈 프레임(110) 상에 고정되는 제 1 패턴 조사부(120), 제 2 패턴 조사부(130) 및 영상 획득부(140)를 포함할 수 있다. 실시예에 따라, 모듈 프레임(110)이 없이 제 1 패턴 조사부(120), 제 2 패턴 조사부(130) 및/또는 영상 획득부(140)가 케이싱(11)에 직접 고정되는 것도 가능하다.
각각의 패턴 조사부(120, 130)는 광원과, 상기 광원으로부터 조사된 광이 투과됨으로써 소정의 패턴을 생성하는 패턴생성자(OPPE: Optical Pattern Projection Element)를 포함할 수 있다. 상기 광원은 레이져 다이오드(Laser Diode, LD), 발광 다이오드(Light Emitteing Diode, LED) 등 일 수 있다. 레이져 광은 단색성, 직진성 및 접속 특성에 있어 다른 광원에 비해 월등해, 정밀한 거리 측정이 가능하며, 특히, 적외선 또는 가시광선은 대상체의 색상과 재질 등의 요인에 따라 거리 측정의 정밀도에 있어서 편차가 크게 발생되는 문제가 있기 때문에, 상기 광원으로는 레이져 다이오드가 바람직하다. 상기 패턴생성자는 렌즈, DOE(Diffractive optical element)를 포함할 수 있다. 각각의 패턴 조사부(120, 130)에 구비된 패턴 생성자의 구성에 따라 다양한 패턴의 광이 조사될 수 있다.
제 1 패턴 조사부(120)는 제 1 패턴의 광(P1, 이하, 제 1 패턴 광이라고 함.)을 본체(10)의 전방 하측을 향해 조사할 수 있다. 따라서, 제 1 패턴 광(P1)은 청소구역의 바닥을 향해 입사될 수 있다. 제 1 패턴 광(P1)은 수평선(Ph)과 수직선(Pv)이 교차하는 십자 패턴의 형태로 구성될 수 있다.
제 1 패턴 조사부(120), 영상 획득부(140) 및 제 2 패턴 조사부(130)는 일렬로 배치될 수 있다. 바람직하게는, 영상 획득부(140)는, 제 1 패턴 조사부(120)와 제 2 패턴 조사부(130) 사이에 배치되나, 반드시 이에 한정되는 것은 아니다.
실시예에서, 제 1 패턴 조사부(120)는 영상 획득부(140)의 상측에 위치하여 전방을 향해 하방으로 제 1 패턴 광(P1)을 조사하여, 제 1 패턴 조사부(120) 보다 하측에 위치하는 장애물을 감지하고, 제 2 패턴 조사부(130)는 영상 획득부(140)의 하측에 위치하여 전방을 향해 상방으로 제 2 패턴의 광(P2, 이하, 제 2 패턴 광이라고 함.)을 조사할 수 있다. 따라서, 제 2 패턴 광(P2)은 벽면이나, 청소구역의 바닥으로부터 적어도 제 2 패턴 조사부(130) 보다 높이 위치하는 장애물 또는 장애물의 일정 부분에 입사될 수 있다.
제 2 패턴 광(P2)은 제 1 패턴 광(P1)과 다른 패턴으로 이루어질 수 있고, 바람직하게는 수평선을 포함하여 구성된다. 여기서, 상기 수평선은 반드시 연속한 선분이어야 하는 것은 아니고, 도면들에 도시된 바와 같은 점선으로 이루어질 수도 있다.
한편, 도 2에 표시된 θh는 제 1 패턴 조사부(120)로부터 조사된 패턴 광(P1)의 수평 조사각을 표시한 것으로, 수평선(Ph)의 양단이 제 1 패턴 조사부(120)와 이루는 각도를 나타내며, 130˚ 내지 140˚ 범위에서 정해지는 것이 바람직하나, 반드시 이에 한정되어야 하는 것은 아니다. 도 2에 표시된 점선은 로봇 청소기(1)의 전방을 향하는 것이며, 제 1 패턴 광(P1)은 상기 점선에 대해 대칭인 형태로 구성될 수 있다.
제 2 패턴 조사부(130) 역시 제 1 패턴 조사부(120)와 마찬가지로 수평 조사각이, 바람직하게는, 130˚ 내지 140˚ 범위에서 정해질 수 있으며, 실시예에 따라서는 제 1 패턴 조사부(120)와 동일한 수평 조사각으로 패턴 광(P2)을 조사할 수 있으며, 이 경우, 제 2 패턴 광(P1) 역시 도 2에 표시된 점선에 대해 대칭인 형태로 구성될 수 있다.
영상 획득부(140)는 본체(10) 전방의 영상을 획득할 수 있다. 특히, 영상 획득부(140)에 의해 획득된 영상(이하, 획득영상이라고 함.)에는 패턴 광(P1, P2)이 나타되며, 이하, 획득영상에 나타난 패턴 광(P1, P2)의 상을 광 패턴이라고 하고, 이는 실질적으로 실제 공간 상에 입사된 패턴 광(P1, P2)이 이미지 센서에 맺힌 상이기 때문에, 패턴 광들(P1, P2)과 같은 도면 부호를 부여하여, 제 1 패턴 광(P1) 및 제 2 패턴 광(P2)과 각각 대응하는 상들을 제 1 광 패턴(P1) 및 제 2 광 패턴(P2)이라고 하기로 한다.
영상 획득부(140)는 피사체의 상을 전기적 신호로 변환시킨 후 다시 디지털 신호로 바꿔 메모리소자에 기억시키는 디지털 카메라를 포함할 수 있으며, 상기 디지털 카메라는 이미지센서(미도시)와 영상처리모듈(미도시)를 포함할 수 있다.
상기 이미지센서는 광학 영상(image)을 전기적 신호로 변환하는 장치로, 다수개의 광 다이오드(photo diode)가 집적된 칩으로 구성되며, 상기 광 다이오드로는 픽셀(pixel)을 예로 들 수 있다. 렌즈를 통과한 광에 의해 칩에 맺힌 영상에 의해 각각의 픽셀들에 전하가 축적되며, 픽셀에 축적된 전하들은 전기적 신호(예를들어, 전압)로 변환된다. 상기 이미지센서로는 CCD(Charge Coupled Device), CMOS(Complementary Metal Oxide Semiconductor) 등이 잘 알려져 있다.
상기 영상처리모듈은 상기 이미지센서로부터 출력된 아날로그 신호를 바탕으로 디지털 영상을 생성한다. 상기 영상처리모듈은 상기 아날로그 신호를 디지털 신호로 변환하는 AD컨버터와, 상기 AD컨버터로부터 출력된 디지털 신호에 따라 일시적으로 디지털 정보(digital data)를 기록하는 버퍼 메모리(buffer memory)와, 상기 버퍼 메모리에 기록된 정보를 처리하여 디지털 영상을 구성하는 디지털 신호처리기(DSP:Digital Signal Processor)를 포함할 수 있다.
또한, 로봇 청소기(1)는 마이크로 프로세서(micro processor)에 의해 읽힐 수 있는 데이터를 저장하는 것으로, HDD(Hard Disk Drive), SSD(Solid State Disk), SDD(Silicon Disk Drive), ROM, RAM, CD-ROM, 자기 테이프, 플로피 디스크, 광 데이터 저장 장치 등의 데이터 저장부(미도시)를 포함할 수 있다.
제어부(200)는 영상 획득부(140)에 의해 획득된 영상(획득영상)으로부터 광 패턴(P1, P2)을 검출하는 패턴검출모듈(210)을 포함할 수 있다. 패턴검출모듈(210)은 획득영상을 구성하는 소정의 픽셀들에 대해 점, 선, 면 등의 특징을 검출 (feature detection)하고, 이렇게 검출된 특징을 바탕으로 광 패턴(P1, P2) 또는 광 패턴(P1, P2)을 구성하는 점, 선, 면 등을 검출할 수 있다.
예를 들어, 패턴검출모듈(210)은 주변보다 밝은 픽셀들이 연속됨으로써 구성되는 선분들을 추출하여, 제 1 광 패턴(P1)을 구성하는 수평선(Ph)과 수직선(Pv), 제 2 광 패턴(P2)을 구성하는 수평선(P2)을 추출할 수 있다.
그러나, 이에 한정되지 않고, 디지털 영상으로부터 원하는 형태의 패턴을 추출하는 다양한 기법들이 이미 알려져 있는 바, 패턴검출모듈(210)는 이들 공지된 기술들을 이용하여 제 1 광 패턴(P1)과 제 2 광 패턴(P2)을 추출할 수 있다.
제 1 패턴 조사부(120)와 제 2 패턴 조사부(130)는 영상 획득부(140)에 대해 대칭으로 배치될 수 있다. 도 7을 참조하면, 제 1 패턴 조사부(120)는 영상 획득부(140)로부터 거리 Dh 만큼 떨어진 상측에 위치될 수 있고, 제 2 패턴 조사부(130)는 영상 획득부(140)로부터 하측으로 같은 거리(Dh)만큼 떨어진 지점에 위치할 수 있다. 이하, 제 1 패턴 조사부(120) 또는 제 2 패턴 조사부(130)의 조사 방향이 수평과 이루는 각도를 수직 조사각이라고 정의한다. 구체적으로, 수직 조사각은 각각의 패턴 조사부(120, 130)를 구성하는 렌즈들의 주축(Optical axis)이 향하는 방향이 수평과 이루는 각도로 정의될 수 있다.
제 1 패턴 조사부(120)의 제 1 수직 조사각과 제 2 패턴 조사부(130)의 제 2 수직 조사각은 그 크기가 θr로 동일할 수 있다. 다만, 제 1 패턴 조사부(120)는 수평에 대해 하향하는 각도 θr로 제 1 패턴 광(P1)을 조사하고, 제 2 패턴 조사부(130)는 수평에 대해 상향하는 각도 θr로 제 2 패턴 광(P2)을 조사할 수 있다. θr은 바람직하게는 20˚ 내지 30˚ 범위에서 정해지나 반드시 이에 한정되어야 하는 것을 아니다.
이와 같이, 제 1 패턴 조사부(120)와 제 2 패턴 조사부(130)가 영상 획득부(140)를 기준으로 대칭으로 배치되고, 제 1 패턴 조사부(120)와 제 2 패턴 조사부(130)가 방향은 반대지만 같은 수직 조사각(θr)으로 광을 조사하는 구조는, 칼리브레이션(caribration) 또는 제품 초기화를 쉽게 할 수 있도록 한다.
제 1 패턴 조사부(120) 및/또는 제 2 패턴 조사부(130)로부터 조사된 패턴 광이 장애물에 입사되었을 시, 상기 장애물이 제 1 패턴 조사부(120)로부터 떨어진 위치에 따라, 획득영상에서 광 패턴(P1, P2)의 위치가 달라진다. 예를 들어, 제 1 패턴 광(P1)과 제 2 패턴 광(P2)이 소정의 장애물에 입사되었을 시, 상기 장애물이 로봇 청소기(1)로부터 가깝게 위치한 것일수록, 획득영상에서 제 1 광 패턴(P1)- 특히, 수평 패턴(Ph)-이 높은 위치에 표시되며, 반대로, 제 2 광 패턴(P2)은 낮은 위치에 표시된다. 즉, 영상 획득부(140)에 의해 생성되는 영상을 구성하는 행(횡방향으로 배열된 픽셀들로 이루어진 선)에 대응하는 장애물까지의 거리 데이터를 미리 저장하였다가, 영상 획득부(140)를 통해 획득된 영상에서 검출된 광 패턴(P1, P2)이 소정의 행에서 검출되면, 그 행에 대응하는 장애물까지의 거리 데이터로부터 장애물의 위치가 추정될 수 있다.
그런데, 이와 같은 과정이 정확하게 이루어지기 위해서는, 제 1 패턴 조사부(120)와 제 2 패턴 조사부(130) 각각이 기 설정된 수직 조사각(θr)으로 정확하게 광을 조사하도록 정렬되는 것이 전제되어야 한다. 이와 같은 전제가 이루어졌는지 여부는 칼리브레이션 과정에서 검사될 수 있는데, 예를 들어, 다음과 같은 과정을 통해 검사될 수 있다.
장애물 감지유닛(100)을 고정시키고, 장애물 감지유닛(100)로부터 일정 거리 전방에 장애물 감지유닛(100)을 향하는 평면을 갖는 수직한 입사판(T, 도 7 참조.)을 설치한다. 입사판(T)의 위치는, 바람직하게는 제 1 패턴 광(P1)이 맺힐 수 있는 위치이다.
이 상태에서, 제 1 패턴 조사부(120)를 통해 광을 조사하고, 영상 획득부(140)를 통해 영상을 획득한다. 이렇게 획득된 영상에는 입사판(T)에 입사된 제 1 광 패턴(P1)이 나타난다. 여기서, 장애물 감지유닛(100)로부터 입사판(T)까지의 거리는 이미 알고 있기 때문에, 장애물 감지유닛(100)이 불량 없이 정상적으로 제조된 경우라면, 획득영상 상에서 정해진 위치(ref1, 이하, 기준 위치라고 함.)에 제 1 광 패턴(P1)의 수평선(Ph)이 표시되어야 한다. 도 8의 (a)는 위와 같은 과정에서 획득영상에 표시된 제 1 광 패턴(P1)을 도시한 것으로, 수평선(Ph)이 기준 위치(ref1)에서 검출된 경우를 보여주고 있다.
이제 제 2 패턴 조사부(130)의 조사 방향을 검사하여야 하는데, 이와 같은 과정은, 장애물 감지유닛(100)을 위, 아래가 바뀌도록 뒤집은 후, 위에서 설명한 칼리브레이션하는 과정을 반복함으로써 실시될 수 있다. 즉, 장애물 감지유닛(100)을 위, 아래가 바뀌되도록 뒤집어, 제 2 패턴 조사부(130)가 영상 획득부(140)의 상측에 위치하도록 한 후에, 이번에는 제 2 패턴 조사부(130)가 광을 조사하도록 하여, 영상 획득부(140)를 통해, 입사판(T)에 맺힌 제 2 광 패턴(P2)이 나타난 영상을 획득한다. 이 경우, 제 2 패턴 조사부(130)가 정상이라면, 기준 위치(ref1)에서 제 2 광 패턴(P2)이 검출되어야 할 것이다. 그러나, 그렇지 못한 경우, 예를 들어 도 8의 (b)에서와 같이 획득영상에서 제 2 광 패턴(P2)이 기준 위치(ref1)로부터 거리 Δg 만큼 상측에 나타난 경우는, 제 2 패턴 조사부(130)의 수직 조사각이 기 설정된 값(θr) 보다 작은 경우로써, 제 2 패턴 조사부(130)의 수직 조사각을 조정하는 것이 바람직하다.
다만, Δg이 기 설정된 오차 범위 내인 경우에는, Δg를 데이터 저장부에 저장하였다가, 향 후 획득영상에 나타난 제 2 광 패턴(P2)의 위치로부터 장애물까지의 거리를 구할 시, Δg을 이용하여 제 2 광 패턴(P2)의 위치를 보상함으로써, 보다 정확하게 장애물까지의 거리를 구할 수 있다.
한편, 영상 획득부(140)는 렌즈의 주축이 수평한 방향을 향하도록 정렬되고, 도 7에 표시된 θr는 영상 획득부(140)의 화각을 표시한 것으로, 100˚ 이상의 값으로 설정되고, 바람직하게는 100˚ 내지 110˚이나, 반드시 이에 한정되어야 하는 것을 아니다.
또한, 청소구역의 바닥으로부터 영상 획득부(140)까지의 대략 145mm 내지 155mm 사이에서 정해질 수 있고, 이 경우, 영상 획득부(140)가 획득한 영상에서 청소구역의 바닥은 d2로 표시된 지점 이후부터 나타나며, S2는 획득영상에 나타난 바닥 중에서 제 1 광 패턴(P1)의 중심(수평선(Ph)과 수직선(Pv)이 만나는 교점)의 위치(d3)에 이르는 영역을 표시한 것이다. 특히, 영역 S2 장애물이 위치하는 경우, 영상 획득부(140)에 의해 상기 장애물에 제 1 패턴 광(P1)이 입사된 영상이 획득될 수 있다. 여기서, 본체(10)로부터 d2까지의 거리는 바람직하게는 100mm 내지 120mm로 설정되고, d3는 로봇 청소기(1)로부터 대략 거리 400mm에 위치되나, 반드시 이에 한정되어야 하는 것은 아니다.
또한, 도 7에 표시된 S1(로봇 청소기(1)로부터 d1 지점에 이르는 영역)제 1 광 패턴(P1)과 제 2 광 패턴(P2)의 위치가 역전되는 영역을 표시한 것으로, 영역 S1내에 장애물이 위치하는 경우, 획득영상에서 1 패턴 광(P1)이 제 2 패턴 광(P2)보다 상측에 위치된다. 이때, d1은 로봇 청소기(1)로부터,바람직하게는, 70mm 내지 80mm 떨어진 위치이나, 반드시 이에 한정되어야 하는 것은 아니다.
도 9는 로봇 청소기가 제 1 위치에 있을 시, 전방에 제 1 장애물이 위치한 경우에 있어서의 획득영상을 도시한 것(a), 로봇 청소기의 위치가 변경되어 제 2 위치에 있을 시의 획득영상을 도시한 것(b)이다.
청소구역 내에 침대와 같이 바닥과의 사이에 소정의 공간(A)이 형성되는 장애물(OB1)이 위치하는 경우, 공간(A)을 인지할 수 있으며, 바람직하게는 공간(A)의 높이를 파악하여 장애물(OB1)을 통과할 것인지, 회피할 것인지를 판단할 수 있다..
예를 들어, 도 9의 (a)와 같이, 제 1 패턴 광(P1)은 공간(A) 내에 위치하는 바닥 상에 입사되고, 제 2 패턴 광(P2)은 공간(A)의 상측에 위치하는 구조물(예를 들어, 침대 매트리스를 지지하는 프레임)에 입사된 경우, 제어부(200)를 구성하는 장애물 정보 획득모듈(220)은 제 1 패턴 광(P1)이 입사된 부분의 상측에 장애물이 위치한다는 것을 인지할 수 있으며, 특히, 획득영상에 나타난 제 2 광 패턴(P2)의 위치로부터, 로봇 청소기(1)로부터 장애물(OB1)까지의 거리를 알 수 있고, 더 나아가, 제 2 패턴 조사부(130)의 수직 조사각이 일정하기 때문에, 장애물(OB1)까지의 거리를 바탕으로 제 2 패턴 광(P2)이 입사된 부분이 청소구역의 바닥으로부터 어느 높이에 위치하는지도 알 수 있다. 따라서, 이러한 정보들을 바탕으로, 장애물 정보 획득모듈(220)은, 공간(A)의 높이를 판단할 수 있고, 바람직하게는, 공간(A)의 높이가 본체(10)의 높이보다 낮다고 판단된 경우, 주행제어모듈(230)은 본체(10)가 장애물(OB1)을 회피하여 주행하도록 주행 구동부(300)를 제어할 수 있다. 반대로, 공간(A)의 높이가 본체(10)의 높이보다 높다고 판단된 경우, 주행제어모듈(230)은 본체(10)가 공간(A) 내로 진입 또는 공간(A)을 통과하도록 주행 구동부(300)를 제어하는 것도 가능하다.
한편, 도 9의 (b)와 같이, 제 1 패턴 광(P1)의 수직선(Pv)은 벽에까지 이르고, 수평선(Pv)은 바닥으로 입사되고, 제 2 패턴 광(P2)이 부분적으로 장애물(OB1)에 입사되어, 제 2 패턴 광(P2)의 일부분은 장애물(OB1)에 입사되고, 다른 일부분은 벽에 입사된 경우, 만약 제 2 패턴 조사부(130)가 없다면, 획득영상에 나타난 제 1 광 패턴(P!)만을 바탕으로 장애물 정보가 구해지기 때문에, 이 경우, 로봇 청소기의 전방에 벽이 존재한다는 사실 밖에 파악될 수 없으나, 실시예와 같이, 제 2 패턴 조사부(130)가 구비되는 경우에는 로봇 청소기(1)와 벽 사이에 장애물(OB1)이 존재한다는 것을 더 파악할 수 있으며, 특히, 수평선(Ph)을 포함하여 구성되는 제 2 패턴 광(P2)은 수평방향으로 더 넓은 영역에서 장애물(OB1)의 탐지가 가능하므로, 제 1 패턴 광(P1)의 수직선(Pv)이 미치지 못하는 영역에 위치하는 장애물(OB1)까지 탐지가 가능하다.
도 10은 장애물에 제 1 패턴 광과 제 2 패턴 광이 입사된 경우에 있어서의 획득영상을 도시한 것이다. 도 10을 참조하면, 본 발명의 일 실시예에 따른 로봇 청소기(1)는 제 1 패턴 광(P1)을 통해 파악할 수 있는 있는 장애물 정보에 더하여, 제 2 패턴 광(P2)을 통해 장애물의 입체적인 형상을 구체적으로 파악할 수 있다. 예를 들어, 장애물(OB2)의 실제 높이는 로봇 청소기(1)가 주행을 통해 극복할 수 없는 높이이나, 로봇 청소기(1)의 현위치에서는 제 1 광 패턴(P1)이 장애물의 하부 영역에 입사되기 때문에, 만약 제 2 패턴 조사부(130)가 없는 경우라면, 주행제어모듈(230)은 본체(10)가 장애물(OB2)을 타고 넘어갈 수 있다고 판단하여, 일단 본체(10)가 장애물(OB2)을 향해 주행하도록 제어한 후, 본체(10)가 점점 장애물(OB2) 쪽으로 접근됨에 따라 획득영상 상에서 제 2 광 패턴(P2)의 위치가 점점 상승되어, 장애물(OB2)의 높이가 본체(10)가 극복 가능한 높이 이상인 것으로 판단되면, 그제서야 회피 주행을 실시하도록 주행 구동부(300)를 제어할 것이다.
이에 반해, 실시예와 같이, 제 2 패턴 조사부(130)가 구비되는 경우는, 현 위치에서 제 2 패턴 광(P2)이 장애물(OB2)에 입사되기 때문에, 미리 장애물(OB2)의 높이를 파악할 수 있고, 그 만큼 더 미리 주행 경로를 최적화할 수 있다.
한편, 장애물 정보 획득모듈(220)은 획득영상에 나타난 수직선(Pv)의 길이를 바탕으로 로봇 청소기(1)의 전방에 위치하는 낭떠러지를 인식할 수 있다. 로봇 청소기(1)의 전방에 낭떠러지(예를 들어, 계단)이 위치하는 경우, 수직선(Pv)의 전단부가 낭떠러지 아래에까지 이를 수 있고, 이렇게 낭떠러지 아래로 조사된 부분은 획득영상에서는 나타나지 않기 때문에, 획득영상에 나타난 수직선(Pv)의 길이가 짧아진다. 따라서, 장애물 정보 획득모듈(220)은 이렇게 수직선(Pv)의 길이가 짧아진 경우 로봇 청소기(1)의 전방에 낭떠러지가 위치한다는 것을 인식할 수 있으며, 이렇게 파악된 낭떠러지 정보를 바탕으로, 주행제어모듈(230)은 로봇 청소기(1)가 낭떠러지에 빠지지 않는 경로를 따라 주행될 수 있도록 주행 구동부(300)를 제어할 수 있다.
Claims (13)
- 청소구역을 주행하며, 청소구역 내 바닥의 이물질을 흡입하는 본체;
상기 본체의 전면에 배치되고, 상기 본체의 전방 하측을 향해 제 1 패턴의 광을 조사하는 제 1 패턴 조사부;
상기 본체의 전면에 배치되되, 상기 제 1 패턴 조사부의 하측에 배치되어, 상기 본체의 전방 상측을 향해 제 2 패턴의 광을 조사하는 제 2 패턴 조사부; 및
상기 본체의 전면에 배치되되, 상기 본체 전방의 영상을 획득하는 영상 획득부를 포함하는 로봇 청소기. - 제 1 항에 있어서,
상기 제 1 패턴 조사부, 상기 영상 획득부 및 상기 제 2 패턴 조사부는 일렬로 배치되는 로봇 청소기. - 제 1 항에 있어서,
상기 영상 획득부는,
상기 제 1 패턴 조사부와 상기 제 2 패턴 조사부 사이에 배치되는 로봇 청소기. - 제 3 항에 있어서,
상기 제 1 패턴 조사부와 상기 제 2 패턴 조사부는 상기 영상 획득부에 대해 대칭으로 배치되는 로봇 청소기. - 제 1 항 내지 제 4 항 중의 어느 한 항에 있어서,
상기 제 1 패턴 조사부와 상기 제 2 패턴 조사부는 동일한 크기의 수직 조사각으로 광을 조사하는 로봇 청소기. - 제 5 항에 있어서,
상기 수직 조사각은 20˚ 내지 30˚인 로봇 청소기. - 제 1 항에 있어서,
상기 영상 획득부는 렌즈의 주축이 수평으로 정렬되고, 100˚ 내지 110˚의 화각을 갖는 로봇 청소기. - 제 1 항에 있어서,
상기 제 1 패턴의 광은 수평선과 상기 수평선과 직교하는 수직선을 포함하는 패턴으로 구성되는 로봇 청소기. - 제 9 항에 있어서,
상기 제 2 패턴의 광은 수평선을 포함하는 패턴으로 구성되는 로봇 청소기. - 제 1 항에 있어서,
상기 제 1 패턴의 광과 상기 제 2 패턴의 광은 서로 다른 패턴으로 구성되는 로봇 청소기. - 제 1 항에 있어서,
상기 영상 획득부는,
상기 바닥에 대한 영상을 상기 본체로부터 거리가 110mm 내지 120mm 이상인 위치부터 획득하는 로봇 청소기. - 외관을 형성하는 케이싱;
상기 케이싱에 회전 가능하게 구비되는 좌륜 및 우륜;
상기 케이싱에 배치되어 청소구역 내 바닥의 이물질을 흡입하는 흡입 모듈; 및
상기 케이싱의 전면에 배치되는 장애물 감지유닛을 포함하고,
상기 장애물 감지유닛은,
상기 케이싱의 전면에 결합되는 모듈 프레임; 및
상기 모듈 프레임 상에 배치되는 제 1 패턴 조사부, 제 2 패턴 조사부 및 영상 획득부를 포함하고,
상기 제 1 패턴 조사부는,
상기 케이싱의 전방 하측을 향해 제 1 패턴의 광을 조사하고,
상기 제 2 패턴 조사부는,
상기 제 1 패턴 조사부의 하측에서 상기 케이싱의 전방 상측을 향해 제 2 패턴의 광을 조사하고,
상기 영상 획득부는,
상기 케이싱의 전방의 영상을 획득하는 로봇 청소기. - 제 12 항에 있어서,
상기 영상 획득부는,
상기 제 1 패턴 조사부와 상기 제 2 패턴 조사부 사이에 배치되는 로봇 청소기.
Priority Applications (22)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160060444A KR101917116B1 (ko) | 2016-05-17 | 2016-05-17 | 로봇 청소기 |
| TW106116154A TWI653964B (zh) | 2016-05-17 | 2017-05-16 | 行動機器人及其控制方法 |
| TW106116158A TWI652034B (zh) | 2016-05-17 | 2017-05-16 | 清掃機器人 |
| TW106116151A TWI689387B (zh) | 2016-05-17 | 2017-05-16 | 行動機器人 |
| TW106116156A TWI639021B (zh) | 2016-05-17 | 2017-05-16 | 行動機器人及其控制方法 |
| CN201720543800.7U CN207979622U (zh) | 2016-05-17 | 2017-05-16 | 机器人吸尘器 |
| EP17799659.2A EP3459688B1 (en) | 2016-05-17 | 2017-05-17 | Mobile robot and control method therefor |
| US15/597,333 US10456004B2 (en) | 2016-05-17 | 2017-05-17 | Mobile robot |
| EP17799662.6A EP3459691B1 (en) | 2016-05-17 | 2017-05-17 | Robot vacuum cleaner |
| EP17799661.8A EP3459690B1 (en) | 2016-05-17 | 2017-05-17 | Mobile robot and control method therefor |
| PCT/KR2017/005132 WO2017200302A2 (ko) | 2016-05-17 | 2017-05-17 | 이동 로봇 및 그 제어방법 |
| US15/597,418 US10517456B2 (en) | 2016-05-17 | 2017-05-17 | Mobile robot and method of controlling the same |
| JP2018560524A JP2019516483A (ja) | 2016-05-17 | 2017-05-17 | ロボット掃除機 |
| PCT/KR2017/005133 WO2017200303A2 (ko) | 2016-05-17 | 2017-05-17 | 이동 로봇 및 그 제어방법 |
| US15/597,670 US10656656B2 (en) | 2016-05-17 | 2017-05-17 | Mobile robot and method for controlling and detecting inclination using pattern light |
| AU2017267155A AU2017267155B2 (en) | 2016-05-17 | 2017-05-17 | Robot vacuum cleaner |
| PCT/KR2017/005135 WO2017200304A2 (ko) | 2016-05-17 | 2017-05-17 | 이동 로봇 및 그 제어방법 |
| RU2018144340A RU2719222C1 (ru) | 2016-05-17 | 2017-05-17 | Робот-пылесос |
| PCT/KR2017/005136 WO2017200305A1 (ko) | 2016-05-17 | 2017-05-17 | 로봇 청소기 |
| EP17799660.0A EP3459689B1 (en) | 2016-05-17 | 2017-05-17 | Mobile robot and control method therefor |
| US15/597,531 US10349798B2 (en) | 2016-05-17 | 2017-05-17 | Mobile robot and method of controlling the same |
| KR1020180129189A KR102430113B1 (ko) | 2016-05-17 | 2018-10-26 | 로봇 청소기 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160060444A KR101917116B1 (ko) | 2016-05-17 | 2016-05-17 | 로봇 청소기 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180129189A Division KR102430113B1 (ko) | 2016-05-17 | 2018-10-26 | 로봇 청소기 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170129571A true KR20170129571A (ko) | 2017-11-27 |
| KR101917116B1 KR101917116B1 (ko) | 2018-11-09 |
Family
ID=60810671
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160060444A KR101917116B1 (ko) | 2016-05-17 | 2016-05-17 | 로봇 청소기 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101917116B1 (ko) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019199098A1 (en) * | 2018-04-13 | 2019-10-17 | Lg Electronics Inc. | Robot cleaner |
| WO2019221523A1 (ko) * | 2018-05-16 | 2019-11-21 | 엘지전자 주식회사 | 청소기 및 그 제어방법 |
| CN114326712A (zh) * | 2021-12-06 | 2022-04-12 | 云鲸智能科技(东莞)有限公司 | 机器人的导航路径生成方法、机器人、装置以及存储介质 |
| CN114714352A (zh) * | 2020-12-29 | 2022-07-08 | 上海擎朗智能科技有限公司 | 机器人位姿信息确定方法、装置、设备及存储介质 |
| US11814155B2 (en) | 2018-12-05 | 2023-11-14 | Sony Group Corporation | Control apparatus and control method for specular object detection based on an unmanned aerial vehicle's reflection |
| CN114714352B (zh) * | 2020-12-29 | 2024-04-26 | 上海擎朗智能科技有限公司 | 机器人位姿信息确定方法、装置、设备及存储介质 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4954962A (en) | 1988-09-06 | 1990-09-04 | Transitions Research Corporation | Visual navigation and obstacle avoidance structured light system |
| US9002511B1 (en) * | 2005-10-21 | 2015-04-07 | Irobot Corporation | Methods and systems for obstacle detection using structured light |
| JP5709009B2 (ja) * | 2011-11-17 | 2015-04-30 | Ckd株式会社 | 三次元計測装置 |
-
2016
- 2016-05-17 KR KR1020160060444A patent/KR101917116B1/ko active IP Right Grant
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019199098A1 (en) * | 2018-04-13 | 2019-10-17 | Lg Electronics Inc. | Robot cleaner |
| KR20190130177A (ko) * | 2018-04-13 | 2019-11-22 | 엘지전자 주식회사 | 로봇 청소기 |
| WO2019221523A1 (ko) * | 2018-05-16 | 2019-11-21 | 엘지전자 주식회사 | 청소기 및 그 제어방법 |
| KR20190134925A (ko) * | 2018-05-16 | 2019-12-05 | 엘지전자 주식회사 | 청소기 및 그 제어방법 |
| US11814155B2 (en) | 2018-12-05 | 2023-11-14 | Sony Group Corporation | Control apparatus and control method for specular object detection based on an unmanned aerial vehicle's reflection |
| CN114714352A (zh) * | 2020-12-29 | 2022-07-08 | 上海擎朗智能科技有限公司 | 机器人位姿信息确定方法、装置、设备及存储介质 |
| CN114714352B (zh) * | 2020-12-29 | 2024-04-26 | 上海擎朗智能科技有限公司 | 机器人位姿信息确定方法、装置、设备及存储介质 |
| CN114326712A (zh) * | 2021-12-06 | 2022-04-12 | 云鲸智能科技(东莞)有限公司 | 机器人的导航路径生成方法、机器人、装置以及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101917116B1 (ko) | 2018-11-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| AU2017267155B2 (en) | Robot vacuum cleaner | |
| US10656656B2 (en) | Mobile robot and method for controlling and detecting inclination using pattern light | |
| US20180218216A1 (en) | Robot cleaner and method for controlling the same | |
| KR102147207B1 (ko) | 이동 로봇 및 그 제어방법 | |
| KR101566207B1 (ko) | 로봇 청소기 및 그 제어방법 | |
| KR101917116B1 (ko) | 로봇 청소기 | |
| JP2014048842A (ja) | 自律移動型機器 | |
| CN112153928B (zh) | 清扫机及其控制方法 | |
| KR102147208B1 (ko) | 이동 로봇 및 그 제어방법 | |
| KR102167898B1 (ko) | 이동 로봇 및 그 제어방법 | |
| US20210026367A1 (en) | Robot cleaner and method for controlling the same | |
| JP2018153375A (ja) | 電気機器、電気機器としての自律走行型掃除機、及び、電気機器とベースとを有するシステム | |
| KR20190134925A (ko) | 청소기 및 그 제어방법 | |
| KR102048364B1 (ko) | 로봇 청소기 | |
| KR20080090367A (ko) | 이동로봇 및 그 동작방법 | |
| KR20180121441A (ko) | 로봇 청소기 | |
| JP2020052601A (ja) | 自律走行掃除機及び制御方法 | |
| KR102428214B1 (ko) | 이동 로봇 및 그 제어방법 | |
| WO2020059292A1 (ja) | 自律走行掃除機 | |
| KR20190003846A (ko) | 이동 로봇 및 그 제어방법 | |
| KR20180133829A (ko) | 이동 로봇 및 그 제어방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |