KR20170080949A - Easy estimation system and method of wheel lift and suspension force for a vehicle and mobile robot - Google Patents
Easy estimation system and method of wheel lift and suspension force for a vehicle and mobile robot Download PDFInfo
- Publication number
- KR20170080949A KR20170080949A KR1020150190991A KR20150190991A KR20170080949A KR 20170080949 A KR20170080949 A KR 20170080949A KR 1020150190991 A KR1020150190991 A KR 1020150190991A KR 20150190991 A KR20150190991 A KR 20150190991A KR 20170080949 A KR20170080949 A KR 20170080949A
- Authority
- KR
- South Korea
- Prior art keywords
- suspension
- link
- unit
- angle
- bar
- Prior art date
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/018—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method
- B60G17/0182—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method involving parameter estimation, e.g. observer, Kalman filter
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2204/00—Indexing codes related to suspensions per se or to auxiliary parts
- B60G2204/10—Mounting of suspension elements
- B60G2204/20—Mounting of accessories, e.g. pump, compressor
- B60G2204/202—Mounting of accessories, e.g. pump, compressor of cables
- B60G2204/2022—Mounting of accessories, e.g. pump, compressor of cables using a suspension element (e.g. link, damper or spring) as part of the electrical circuitry
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2204/00—Indexing codes related to suspensions per se or to auxiliary parts
- B60G2204/40—Auxiliary suspension parts; Adjustment of suspensions
- B60G2204/422—Links for mounting suspension elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/05—Attitude
- B60G2400/051—Angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/18—Automatic control means
- B60G2600/187—Digital Controller Details and Signal Treatment
- B60G2600/1875—Other parameter or state estimation methods not involving the mathematical modelling of the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/70—Estimating or calculating vehicle parameters or state variables
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Vehicle Body Suspensions (AREA)
Abstract
A suspension force estimation system and method for a traveling vehicle (robot) having a 4-bar link structure is disclosed.
According to the present invention, there is provided a method of estimating a suspension force of a vehicle (robot), comprising the steps of inputting an initial measurement necessary for estimating a suspension force of a vehicle (robot), driving the main body to apply a force to the suspension, measuring an angle at which the link moves, Storing the angle, calculating a force applied to the suspension based on the stored initial measurement and an angle at which the link moves, and outputting the calculated result.
According to the present invention as described above, there is no need to perform a dynamic analysis of a complicated process, and it is possible to easily calculate a vertical drag by estimating a force applied to a suspension of a vehicle (robot) without using expensive sensors have.
Description
The present invention relates to a suspension force estimating system and method for a traveling vehicle (robot) having a 4-bar link structure, and more particularly, to a suspension force estimating system and method for estimating the suspension stability of a vehicle (robot) And more particularly to a suspension force estimation system and method capable of estimating the suspension force of a vehicle (robot) for measurement.
In general, it is very difficult to accurately predict the motion characteristics of a vehicle. Such a motion characteristic may have an influence on the driver in terms of the degree of fatigue, decrease in driving func- tion, and stability of the driving which may affect the driver's life Is a very important factor that can be determined.
Therefore, when developing a vehicle, design goals should be set for these characteristics, and design and development should be carried out while confirming whether the level of design can satisfy the design target.
The driving stability is most important not only for vehicles such as commercial vehicles running on the road, SUVs running off-road, but also for robots such as mobile robots, military robots, exploration robots and disaster rescue robots.
In addition, the inclination of the vehicle body is the most basic in determining the stability of the vehicle. In order to determine the inclination of the vehicle body, various sensors are used, or the stability is determined through dynamic analysis.
On the other hand, a number of prior patents are disclosed in addition to Korean Patent No. 0231200 (attachment structure of sensing element for differential load measurement).
The above-mentioned prior patent discloses a method of measuring the load of a vehicle by attaching various sensors.
However, such a dynamic analysis requires a complicated process.
Further, in order to measure the load, expensive sensors are used, which causes a problem of consuming a lot of cost.
SUMMARY OF THE INVENTION The present invention has been made in order to solve the above problems, and it is an object of the present invention to provide a suspension force estimation device for a vehicle, which can easily estimate a suspension force of a robot without requiring a dynamic analysis of a complex process .
The object of the present invention is to reduce the cost by making it possible to estimate the suspension force of a vehicle (robot) without using expensive sensors.
According to an aspect of the present invention, there is provided a suspension force estimation method for a traveling vehicle (robot) having a 4-bar link structure,
And a step of inputting to the input unit initial measurement values that can be measured with respect to the suspension and the link in which the control unit is installed in the vehicle (robot).
And the control unit drives the main body to drive the wheel, thereby applying a force to the suspension.
In addition, the control unit controls the angle extracting unit to measure the angle at which the link moves by driving the wheel.
And storing an initial measurement value received from the input unit and an angle at which the link measured by the angle extracting unit moves.
In addition, the controller may calculate the force applied to the suspension by receiving the initial measurement value and the angle at which the link moves.
The controller may output the calculated result through an output unit.
In order to solve the above-mentioned problems, a suspension force estimation system of a traveling vehicle (robot) having a four-bar link structure according to the present invention includes a driving unit including a link and a suspension driven according to driving of a wheel, And an input unit for inputting initial measurement values to be measured with respect to links and suspensions of the driving unit.
And an angle extracting unit for measuring an angle at which the link is moved by the operation of the driving unit.
The apparatus also includes a storage unit for storing an initial measured value input from the input unit and an angle at which the link measured by the angle extracting unit moves.
And a control unit connected to the driving unit, the input unit, the angle extracting unit, the storage unit, and the output unit to control the operation, and the initial measurement value and the angle at which the link moves are received from the storage unit to calculate a force applied to the suspension .
And an output unit for outputting a result calculated by the control unit.
According to the present invention as described above, it is possible to easily calculate the vertical drag by estimating the suspension force of a vehicle (robot) without needing a dynamic analysis of a complex process.
In addition, it is possible to obtain a vertical drag force without using expensive sensors, thereby reducing the cost.
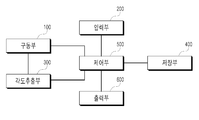
1 is a block diagram of a suspension force estimation system of a traveling vehicle (robot) having a 4-bar link structure.
2 is a view showing a vehicle (robot) equipped with a suspension force estimation system.
Figure 3 is an enlarged view of the suspension force estimation system in Figure 2;
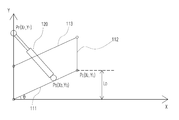
Fig. 4 is a view in a two-dimensional plane with respect to Fig. 3. Fig.
FIG. 5 is a diagram showing a two-dimensional plane view of driving of the suspension. FIG.
6 is a flowchart sequentially showing an embodiment of a suspension force estimation method of a traveling vehicle (robot) having a 4-bar link structure.
Hereinafter, embodiments of the present invention will be described in detail with reference to the accompanying drawings so that those skilled in the art can easily carry out the present invention. The present invention may, however, be embodied in many different forms and should not be construed as limited to the embodiments set forth herein. In order to clearly illustrate the present invention, parts not related to the description are omitted, and similar parts are denoted by like reference characters throughout the specification.
Throughout the specification, when an element is referred to as "comprising ", it means that it can include other elements as well, without excluding other elements unless specifically stated otherwise. Also, the terms " part, "" ... "," module ", and the like described in the specification mean units for processing at least one function or operation, and may be implemented by hardware or software or a combination of hardware and software .
Hereinafter, the present invention will be described in detail with reference to the preferred embodiments of the present invention with reference to the accompanying drawings.
Like reference symbols in the drawings denote like elements.
Fig. 1 is a block diagram of a suspension force estimation system of a traveling vehicle (robot) having a 4-bar link structure according to an embodiment of the present invention, Fig. 2 is a block diagram of a suspension force estimation system Fig. 8 is an illustration showing a vehicle (robot). Fig.
1 and 2, the suspension force estimation system of a traveling vehicle (robot) having a 4-bar link structure according to an embodiment of the present invention is installed on one side of a vehicle (robot) do.
That is, the system for estimating the force of the suspension includes a
3, the
In the
The initial measurement includes the length and position coordinates of the
The
The
The
In addition, the
The
FIG. 3 is an enlarged view of the
The
That is, the
More specifically, one end of the
The other end of the
The other end of the
Thus, the main body 10 between the
Here, if necessary, the D bar 114 may be linked between each end of the
One end of the
The
A suspension force estimation method of a traveling vehicle (robot) having a 4-bar link structure having such a configuration will now be described.
The suspension force estimation method of a traveling vehicle (robot) having a 4-bar link structure according to an embodiment of the present invention is configured to calculate the force of the
4 and 5, which are correspondingly shown in a two-dimensional plane for Fig. 3, are used for ease of operation and explanation.
In the two-dimensional plan view of FIG. 4, the reference coordinates are positions at which one end of the
When the
The ends of the
The coordinate Pf (Xf, Yf) of the end of the
At this time, initial measurement values that can be easily measured through the manufacturing process of the
As described above, the position where one end of the
The position coordinates Pf (Xf, Yf), at which one end of the
The position coordinates Pf (Xf, Yf) can be simply obtained by measuring the length from the reference coordinates to Pf (Xf, Yf).
The lengths of the
The length c between the coordinates Ps (Xs, Ys) at which the
Thus, the new coordinates Pl (Xl, Yl) for the other end of the
[Equation 1]
Pl (Xl, Yl) = (Llcos?, Llsin?)
(Ll is the length of the
Similarly, it is possible to obtain the lengths of a and b by using a given length c between P1 (Xl, Yl) and Ps (Xs, Ys) and the angle [theta]
a = c (cos?), b = c (sin?),
(c is the length between Pl (Xl, Yl) and Ps (Xs, Ys)
When this is used to obtain new coordinates of the compressed end of the suspension,
Ps (Xs, Ys) = Ps (Xl-a, Yl-b)
, And the compressed new length Lsp of the
&Quot; (2) "
Lsp = sqrt ((Xf - Xs ') ^ 2 + (Yf - Ys') ^ 2)
= sqrt ((Xf - Xl - a) ^ 2 + (Yf - Yl - b) ^ 2)
The amount of change in the length of the
However,
x = Lsi - Lsp
(Where x is the length variation of the suspension, Lsi is the initial uncompressed total length of the
Further, the force of the
&Quot; (4) "
F = Kx + Cx '
(F is the force of the
Here, x '= x / (sampling time)
.
The spring constant K and the damping coefficient C can be confirmed through the specifications of the
The suspension force estimation method of the traveling vehicle (robot) having the 4-bar link structure is summarized as follows.
6, the method for estimating the force of a suspension includes an input step S100, a driving step S200, an angle extraction step S300, a storage step S400, an operation step S500, S600).
The input step S100 inputs the initial measured values of the
In the driving step S200, the main body 10 and the
Thus, the
The angle extracting step S300 measures the angle at which the
The storing step S400 stores the initial measured value input from the
The calculation step S500 calculates the force of the
The output step S600 outputs the result calculated in the operation step S500 through the
This makes it possible to measure the force applied to the
Then, the vertical drag of the vehicle (robot) can be calculated based on the force applied to the
While the present invention has been described in connection with what is presently considered to be practical exemplary embodiments, it is to be understood that the invention is not limited to the disclosed embodiments, but, on the contrary, And all changes to the scope that are deemed to be valid.
10: main body 11: wheel
100: driving unit 110: link
111: A bar 112: B bar
113: C bar 114: D bar
120: Suspension 200: Input
300: angle extracting unit 400:
500: control unit 600: output unit
Claims (8)
A driving unit disposed between the vehicle body and the wheel, the driving unit including a link and a suspension operated according to driving of the wheel;
An input unit for inputting an initial measurement value for a link and a suspension of the driving unit;
An angle extracting unit for measuring an angle at which the link of the driving unit moves;
A storage unit for storing an initial measured value input from the input unit and an angle at which the link measured by the angle extracting unit moves;
A control unit connected to the driving unit, the input unit, the angle extracting unit, the storage unit, and the output unit to control the operation, and to calculate an initial measured value input from the input unit and an angle at which the link moves,
And an output unit for outputting a result calculated by the control unit. The suspension force estimating system of a traveling vehicle (robot) having a 4-bar link structure.
The driving unit includes a link and a suspension which are formed of the bars A, B, and C,
One end of the A bar is rotatably connected to one side of the main body,
The other end of the bar A is linked to one end of the bar B, the wheel is mounted on one side of the bar B,
The other end of the B bar is linked to one end of the C bar,
And the other end of the C bar is rotatably connected to the other side of the body,
Wherein the suspension has one end rotatably connected to the other end of the main body and the other end rotatably connected to one side of the A bar.
The initial measured values input to the input unit include the length of the link and the position at which the link is fixed, the length of the suspension before being compressed, the upper fixed point coordinates of the suspension, the lower fixed point coordinates of the suspension, A distance, a spring constant of the suspension, and a damping coefficient of the suspension are included in the suspension force estimation system of the traveling vehicle (robot).
Wherein the angle extracting unit extracts an angle of movement of the link using a variable resistor having a linear characteristic or measures the angle of movement of the link by mounting an encoder. Suspension force estimation system.
Inputting an initial measurement of the link and the suspension to the input (S100);
The control unit driving the main body to drive the wheel (S200);
The control unit controlling the angle extracting unit to measure an angle at which the link moves by driving the wheel (S300);
(S400) of storing, in the storage unit, an initial measurement value input from the input unit and an angle at which the link measured by the angle extraction unit moves;
(S500) of calculating the force of the suspension by receiving the initial measurement value and the angle at which the link moves from the storage unit;
(S600) of outputting the calculated result of the control unit through an output unit. The suspension force estimating method of a traveling vehicle (robot) having a 4-bar link structure.
Wherein the control unit calculates a length change amount of the suspension in accordance with the following equation (3): " (3) "
&Quot; (3) "
x = Lsi - Lsp
(Where x is the length variation of the suspension, Lsi is the uncompressed total length of the suspension, and Lsp is the compressed total length of the suspension)
Wherein the controller calculates a total compressed length of the suspension in accordance with Equation (2) below. ≪ EMI ID = 2.0 >
&Quot; (2) "
Lsp = sqrt ((Xf - Xs ') ^ 2 + (Yf - Ys') ^ 2)
(Where Xf and Yf are the fixed coordinates of the suspension end connected to one side of the body, and Xs and Ys are the new coordinates of the compressed other end of the suspension)
Wherein the controller calculates a suspension force in accordance with the following equation (4): " (4) "
&Quot; (4) "
F = Kx + Cx '
(Where F is the force of the suspension, K is the spring constant, C is the damping coefficient, x 'is x / (sampling time)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150190991A KR20170080949A (en) | 2015-12-31 | 2015-12-31 | Easy estimation system and method of wheel lift and suspension force for a vehicle and mobile robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150190991A KR20170080949A (en) | 2015-12-31 | 2015-12-31 | Easy estimation system and method of wheel lift and suspension force for a vehicle and mobile robot |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170080949A true KR20170080949A (en) | 2017-07-11 |
Family
ID=59355018
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150190991A KR20170080949A (en) | 2015-12-31 | 2015-12-31 | Easy estimation system and method of wheel lift and suspension force for a vehicle and mobile robot |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20170080949A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230056955A (en) * | 2021-10-21 | 2023-04-28 | 한국기술교육대학교 산학협력단 | Wildlife elimination extermination robot system and method of operation thereof |
| WO2023113065A1 (en) * | 2021-12-13 | 2023-06-22 | 엘지전자 주식회사 | Robot |
-
2015
- 2015-12-31 KR KR1020150190991A patent/KR20170080949A/en not_active Application Discontinuation
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230056955A (en) * | 2021-10-21 | 2023-04-28 | 한국기술교육대학교 산학협력단 | Wildlife elimination extermination robot system and method of operation thereof |
| WO2023113065A1 (en) * | 2021-12-13 | 2023-06-22 | 엘지전자 주식회사 | Robot |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3165885A1 (en) | Load weighing method and system for wheel loader | |
| KR101478760B1 (en) | Apparatus and method for measuring lift axle weight of vehicle | |
| JP2008537521A (en) | Wheel suspension for automobile | |
| TW201700977A (en) | Method for operating an inertial sensor and for operating a vehicle having such an inertial sensor, and such a vehicle | |
| CN110887978A (en) | System and method for calibrating acceleration sensors using a payload system | |
| JP7493647B2 (en) | Wear amount estimation device and wear amount estimation method | |
| EP2511111B1 (en) | Vehicle control device | |
| JPWO2017175844A1 (en) | Attitude estimation device and transportation equipment | |
| US20110093239A1 (en) | Vehicle weight sensing methods and systems | |
| EP3689699A1 (en) | Tire force estimation system and tire force estimation method | |
| JP7146814B2 (en) | Track Inspection Vehicles and Methods for Detecting Vertical Track Position | |
| KR20170080949A (en) | Easy estimation system and method of wheel lift and suspension force for a vehicle and mobile robot | |
| JP6547065B2 (en) | Attitude estimation device and transportation equipment | |
| JP5591185B2 (en) | Vehicle position and orientation measurement device | |
| JP6426698B2 (en) | Method for reducing the overturning risk of a motor vehicle having a controllable suspension system | |
| JP5494047B2 (en) | Chassis dynamometer system for evaluating body vibration and method for evaluating body vibration | |
| JP6372738B2 (en) | Vehicle weight estimation device | |
| CN112526880B (en) | Real-time estimation method for road surface height in vehicle driving process | |
| KR101459683B1 (en) | Automobile and the control method | |
| JP2019027874A (en) | Railway vehicle abnormality diagnosis system | |
| US9421839B2 (en) | High accuracy load detection for air suspension systems | |
| CN102991297A (en) | Control device for an adjustable suspension system | |
| KR101189548B1 (en) | Calculation Method of Velocity Vector for automobile | |
| CN115135519A (en) | Determining dynamic quantities of a vehicle by distributed sensors | |
| JP6260866B2 (en) | Vehicle weight estimation device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |