KR20170066049A - Vehicle, and control method for the same - Google Patents
Vehicle, and control method for the same Download PDFInfo
- Publication number
- KR20170066049A KR20170066049A KR1020150172591A KR20150172591A KR20170066049A KR 20170066049 A KR20170066049 A KR 20170066049A KR 1020150172591 A KR1020150172591 A KR 1020150172591A KR 20150172591 A KR20150172591 A KR 20150172591A KR 20170066049 A KR20170066049 A KR 20170066049A
- Authority
- KR
- South Korea
- Prior art keywords
- environment information
- navigation
- vehicle
- message
- information
- Prior art date
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/02—Control of vehicle driving stability
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/28—Wheel speed
-
- B60W2550/402—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/28—Wheel speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/30—Sensors
- B60Y2400/303—Speed sensors
- B60Y2400/3032—Wheel speed sensors
Abstract
내비게이션이 주행 환경 정보 확인 불능 상태로부터 확인 가능 상태로 회복한 직후 확인한 주행 환경 정보에 따라 주행을 제어하는 차량 및 그 제어방법을 제공한다.
일 실시예에 따른 차량은, 주행을 위한 회전력을 제공하는 구동부; 미리 정해진 주행 경로 상의 주행 환경 정보를 확인하고, 상기 확인된 주행 환경 정보를 포함하는 메시지를 생성하는 내비게이션; 및 상기 생성된 메시지의 상기 주행 환경 정보가 갱신된 것으로 결정되면, 상기 주행 환경 정보에 기초하여 주행하도록 상기 구동부를 제어하는 제어부; 를 포함하고, 상기 제어부는, 상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태에 진입하면, 상기 진입 시점 이후 생성되는 상기 메시지를 무시하고, 상기 내비게이션이 상기 주행 환경 정보 확인 가능 상태를 회복하면, 상기 회복 시점 직후 생성되는 상기 메시지의 상기 주행 환경 정보에 따라 상기 구동부를 제어할 수 있다.Provided is a vehicle and a control method thereof for controlling travel according to travel environment information confirmed immediately after the navigation is restored from a state in which the navigation environment information can not be confirmed to a state in which it can be confirmed.
A vehicle according to an embodiment includes: a driving unit for providing a turning force for driving; Navigation for confirming travel environment information on a predetermined travel route and generating a message including the confirmed travel environment information; And a control unit for controlling the driving unit to travel based on the travel environment information if it is determined that the travel environment information of the generated message is updated. Wherein the control unit ignores the message generated after the entry point when the navigation enters the disabled state of checking the travel environment information, and when the navigation apparatus returns to the travel environment information checkable state, The driving unit can be controlled according to the travel environment information of the message generated immediately after the point of time.
Description
주행 환경 정보에 따라 주행하는 차량 및 그 제어방법에 관한 발명이다.The present invention relates to a vehicle that travels in accordance with travel environment information and a control method thereof.
차량(vehicle)이란 도로나 선로를 따라 주행하면서 인간, 물건 또는 동물 등을 하나의 위치에서 다른 위치로 이동시킬 수 있는 운송 수단의 일종이다. 차량의 일례로는 삼륜 또는 사륜 자동차, 모터사이클 등의 이륜 자동차, 건설 기계, 원동기장치자전거, 자전거 및 선로를 주행하는 열차 등이 있을 수 있다.A vehicle is a type of vehicle that travels along roads or tracks while moving people, objects, or animals from one location to another. Examples of the vehicle include a two-wheeled vehicle such as a three-wheeled or four-wheeled vehicle, a motorcycle, a construction machine, a bike for a prime mover, a train traveling on a bicycle and a track.
최근 차량 업계는 운전자에게 보다 많은 편의와 안전을 제공하는 첨단 운전자 보조 시스템(Advanced Driver Assistance System; ADAS)에 대한 관심이 높아지고 있다.The automotive industry is increasingly interested in the Advanced Driver Assistance System (ADAS), which offers more convenience and safety to drivers.
특히, 정밀 지도를 활용하여 도로 환경을 예측하고, 예측된 도로 환경에 대응되는 적절한 제어 및 편의 서비스를 제공하는 장치 및 방법에 대한 연구가 활발히 진행 중이다. 예를 들어, 차량은 정밀 지도를 이용하여 주행 경로 상의 주행 환경 정보를 확인하고, 이를 기초로 주행 속도를 제어할 수 있다.Particularly, researches are actively conducted on devices and methods for predicting the road environment using the precision map and providing appropriate control and convenience services corresponding to the predicted road environment. For example, the vehicle can check the traveling environment information on the traveling route using the accurate map, and control the traveling speed based on the information.
개시된 발명의 일 실시예에 따르면, 내비게이션이 주행 환경 정보 확인 불능 상태로부터 확인 가능 상태로 회복한 직후 확인한 주행 환경 정보에 따라 주행을 제어하는 차량 및 그 제어방법을 제공한다.According to an embodiment of the disclosed invention, there is provided a vehicle and a control method thereof for controlling travel according to travel environment information confirmed immediately after the navigation is restored from a state in which the travel environment information can not be checked to a state in which it can be confirmed.
일 실시예에 따른 차량은, 주행을 위한 회전력을 제공하는 구동부; 미리 정해진 주행 경로 상의 주행 환경 정보를 확인하고, 상기 확인된 주행 환경 정보를 포함하는 메시지를 생성하는 내비게이션; 및 상기 생성된 메시지의 상기 주행 환경 정보가 갱신된 것으로 결정되면, 상기 주행 환경 정보에 기초하여 주행하도록 상기 구동부를 제어하는 제어부; 를 포함하고, 상기 제어부는, 상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태에 진입하면, 상기 진입 시점 이후 생성되는 상기 메시지를 무시하고, 상기 내비게이션이 상기 주행 환경 정보 확인 가능 상태를 회복하면, 상기 회복 시점 직후 생성되는 상기 메시지의 상기 주행 환경 정보에 따라 상기 구동부를 제어할 수 있다.A vehicle according to an embodiment includes: a driving unit for providing a turning force for driving; Navigation for confirming travel environment information on a predetermined travel route and generating a message including the confirmed travel environment information; And a control unit for controlling the driving unit to travel based on the travel environment information if it is determined that the travel environment information of the generated message is updated. Wherein the control unit ignores the message generated after the entry point when the navigation enters the disabled state of checking the travel environment information, and when the navigation apparatus returns to the travel environment information checkable state, The driving unit can be controlled according to the travel environment information of the message generated immediately after the point of time.
또한, 상기 내비게이션은, 상기 메시지에 상기 주행 환경 정보 확인 순서에 따라 결정되는 순환식 카운터(Cyclic Counter)를 부가할 수 있다.In addition, the navigation may add a cyclic counter determined according to the traveling environment information checking order to the message.
또한, 상기 제어부는, 제 1 메시지의 상기 주행 환경 정보가 갱신된 것으로 결정되면, 상기 제 1 메시지에 부가된 제 1 카운터를 저장한 후, 제 2 메시지에 부가된 제 2 카운터를 상기 저장된 제 1 카운터와 비교하여 상기 제 2 메시지의 상기 주행 환경 정보가 갱신된 것인지 여부를 결정할 수 있다.In addition, when it is determined that the travel environment information of the first message is updated, the control unit stores a first counter added to the first message, and then transmits a second counter added to the second message to the first It is possible to determine whether or not the travel environment information of the second message has been updated by comparing with the counter.
또한, 상기 제어부는, 상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태이면, 상기 저장된 제 1 카운터를 무효(Invalid) 값으로 변환하여 저장할 수 있다.In addition, the controller may convert the stored first counter into an invalid value and store the stored first counter when the navigation system can not confirm the travel environment information.
또한, 상기 제어부는, 상기 내비게이션이 상기 주행 환경 정보 확인 가능 상태를 회복하면, 상기 저장된 무효 값을 상기 회복 시점 직후 생성된 제 3 메시지에 부가된 제 3 카운터로 변환하여 저장할 수 있다.The control unit may convert the stored invalid value into a third counter added to the third message generated immediately after the recovery point, and store the stored invalidity value when the navigation unit has recovered the traveling environment information checkable state.
또한, 상기 제어부는, 상기 내비게이션의 상기 주행 환경 정보 확인 불능 상태 진입 시점에 상기 차량의 위치에 기초하여 상기 구동부 제어의 중단 여부를 결정할 수 있다.In addition, the control unit may determine whether to stop the driving unit control based on the position of the vehicle at the entry of the navigation environment information inability to confirm the navigation environment information.
또한, 상기 제어부는, 상기 내비게이션의 상기 주행 환경 정보 확인 불능 상태 진입 시점에 상기 차량이 상기 주행 경로 상에 존재하면 상기 구동부의 제어를 유지할 수 있다.In addition, the control unit may maintain the control of the driving unit when the vehicle exists on the traveling path at the entry of the navigation environment information inability to confirm the navigation environment.
또한, 상기 구동부로부터 상기 회전력을 제공받는 차륜의 회전 속도를 감지하는 휠속 센서; 를 더 포함하고, 상기 제어부는, 상기 휠속 센서의 감지 결과를 참조하여 상기 구동부의 제어를 유지할 수 있다.A wheel speed sensor for detecting the rotational speed of the wheel received the rotational force from the driving unit; And the control unit may maintain the control of the driving unit by referring to the detection result of the wheel speed sensor.
또한, 상기 제어부는, 상기 내비게이션의 상기 주행 환경 정보 확인 불능 상태 진입 시점에 상기 차량이 상기 주행 경로를 이탈하여 존재하면 상기 구동부의 제어를 중단할 수 있다.In addition, the control unit may stop the control of the driving unit when the vehicle is out of the traveling path at the entry of the navigation environment information unable to check the navigation environment.
또한, 상기 내비게이션은, 외부의 입력, 및 상기 차량의 상기 주행 경로 이탈 중 적어도 하나에 따라 상기 주행 환경 정보 확인 불능 상태 또는 상기 주행 환경 정보 확인 가능 상태로 변경됨을 알리는 내비게이션 상태 정보를 상기 제어부로 전송할 수 있다.Further, the navigation may transmit navigation state information indicating that the traveling environment information can not be checked or changed to the traveling environment information checking state according to at least one of an external input and a departure of the traveling path of the vehicle .
또한, 상기 내비게이션은, 상기 주행 경로 상의 전방 과속 단속 카메라 정보, 전방 과속 방지턱 정보, 전방 도로 구배 정보, 및 전방 도로 곡률 정보 중 적어도 하나를 포함하는 상기 주행 환경 정보를 확인하고, 상기 확인한 주행 환경 정보 및 상기 차량의 주행 도로의 속성 정보를 포함하는 상기 메시지를 생성할 수 있다.In addition, the navigation may be configured to identify the driving environment information including at least one of forward overspeed interception camera information, forward speed restriction information, forward road gradient information, and forward road curvature information on the driving route, And attribute information of the running road of the vehicle.
일 실시예에 따른 차량의 제어방법은, 미리 정해진 주행 경로 상의 주행 환경 정보를 포함하는 메시지를 내비게이션에서 생성하는 단계; 및 상기 생성된 메시지의 상기 주행 환경 정보가 갱신된 것으로 결정되면, 상기 주행 환경 정보에 기초하여 주행하는 단계; 를 포함하고, 상기 주행 환경 정보에 기초하여 주행하는 단계는, 상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태에 진입하면, 상기 진입 시점 이후 생성되는 상기 메시지를 무시하는 단계; 및 상기 내비게이션이 상기 주행 환경 정보 확인 가능 상태를 회복하면, 상기 회복 시점 직후 생성되는 상기 메시지의 상기 주행 환경 정보에 따라 주행하는 단계; 를 포함할 수 있다.According to an embodiment of the present invention, there is provided a method of controlling a vehicle, the method comprising: generating, in navigation, a message including travel environment information on a predetermined travel route; And running on the basis of the travel environment information if it is determined that the travel environment information of the generated message is updated. Wherein the step of traveling based on the travel environment information comprises the steps of: ignoring the message generated after the entry point when the navigation enters the travel environment information incapability state; And traveling on the basis of the travel environment information of the message generated immediately after the recovery point when the navigation is restored to the travel environment information checkable state; . ≪ / RTI >
또한, 상기 메시지를 생성하는 단계는, 상기 메시지에 상기 주행 환경 정보 확인 순서에 따라 결정되는 순환식 카운터(Cyclic Counter)를 부가할 수 있다.In addition, the step of generating the message may add a cyclic counter determined according to the traveling environment information checking order to the message.
또한, 상기 주행 환경 정보에 기초하여 주행하는 단계는, 제 1 메시지의 상기 주행 환경 정보가 갱신된 것으로 결정되면, 상기 제 1 메시지에 부가된 제 1 카운터를 저장한 후, 제 2 메시지에 부가된 제 2 카운터를 상기 저장된 제 1 카운터와 비교하여 상기 제 2 메시지의 상기 주행 환경 정보가 갱신된 것인지 여부를 결정할 수 있다.The step of running based on the travel environment information may further include storing a first counter added to the first message when it is determined that the travel environment information of the first message has been updated, The second counter may be compared with the stored first counter to determine whether the travel environment information of the second message is updated.
또한, 상기 진입 시점 이후 생성되는 상기 메시지를 무시하는 단계는, 상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태이면, 상기 저장된 제 1 카운터를 무효(Invalid) 값으로 변환하여 저장하는 단계; 를 포함할 수 있다.The step of ignoring the message generated after the time of entry may further include converting the stored first counter into an invalid value and storing the stored first counter when the navigation system can not confirm the travel environment information, . ≪ / RTI >
또한, 상기 회복 시점 직후 생성되는 상기 메시지의 상기 주행 환경 정보에 따라 주행하는 단계는, 상기 내비게이션이 상기 주행 환경 정보 확인 가능 상태를 회복하면, 상기 저장된 무효 값을 상기 회복 시점 직후 생성된 제 3 메시지에 부가된 제 3 카운터로 변환하여 저장하는 단계; 를 포함할 수 있다.The step of traveling according to the travel environment information of the message generated immediately after the recovery point may further include storing the stored invalidity value in the third message generated immediately after the recovery point, To a third counter added to the first counter; . ≪ / RTI >
또한, 상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태에 진입하면, 상기 진입 시점 이후 생성되는 상기 메시지를 무시하는 단계는, 상기 내비게이션의 상기 주행 환경 정보 확인 불능 상태 진입 시점에 상기 차량의 위치에 기초하여 상기 구동부 제어의 중단 여부를 결정하는 단계; 를 포함할 수 있다.The step of disregarding the message generated after the entry point of time, when the navigation enters the disabled state of checking the traveling environment information, may further include a step of, based on the position of the vehicle at the time of entry of the traveling environment information non- Determining whether to stop the driving unit control; . ≪ / RTI >
또한, 상기 차량의 위치에 기초하여 상기 구동부 제어의 중단 여부를 결정하는 단계는, 상기 내비게이션의 상기 주행 환경 정보 확인 불능 상태 진입 시점에 상기 차량이 상기 주행 경로 상에 존재하면 상기 구동부 제어의 유지를 결정할 수 있다.The step of determining whether or not to stop the driving unit control based on the position of the vehicle further includes the step of maintaining the driving unit control when the vehicle exists on the traveling path at the entry of the navigation environment information non- You can decide.
또한, 상기 차량의 차륜의 회전 속도를 감지하는 단계; 를 더 포함하고, 상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태에 진입하면, 상기 진입 시점 이후 생성되는 상기 메시지를 무시하는 단계는, 상기 구동부의 제어의 유지를 결정하면, 상기 차륜의 회전 속도를 참조하여 상기 구동부를 제어할 수 있다.Sensing a rotational speed of the wheel of the vehicle; And ignoring the message generated after the entry point, when the navigation enters the disabled state of the travel environment information, if the control of the driving unit is determined to be maintained, So that the driving unit can be controlled.
또한, 상기 차량의 위치에 기초하여 상기 구동부 제어의 중단 여부를 결정하는 단계는, 상기 내비게이션의 상기 주행 환경 정보 확인 불능 상태 진입 시점에 상기 차량이 상기 주행 경로를 이탈하여 존재하면 상기 구동부 제어의 중단을 결정할 수 있다.The step of determining whether or not to stop the driving unit control based on the position of the vehicle further includes a step of stopping the driving unit control when the vehicle is out of the driving route at the time of entering the driving environment information non- Can be determined.
또한, 외부의 입력, 및 상기 차량의 상기 주행 경로 이탈 중 적어도 하나에 따라 상기 주행 환경 정보 확인 불능 상태 또는 상기 주행 환경 정보 확인 가능 상태로 변경됨을 알리는 내비게이션 상태 정보를 생성하는 단계; 를 더 포함할 수 있다.Generating navigation state information indicating that the traveling environment information can not be checked or changed to a state in which the traveling environment information can be checked according to at least one of an external input and a departure of the traveling path of the vehicle; As shown in FIG.
또한, 상기 메시지를 생성하는 단계는, 상기 주행 경로 상의 전방 과속 단속 카메라 정보, 전방 과속 방지턱 정보, 전방 도로 구배 정보, 및 전방 도로 곡률 정보 중 적어도 하나를 포함하는 상기 주행 환경 정보를 확인하고, 상기 확인한 주행 환경 정보 및 상기 차량의 주행 도로의 속성 정보를 포함하는 상기 메시지를 생성할 수 있다.Also, the step of generating the message may include checking the driving environment information including at least one of forward overspeed restriction camera information, forward speed restriction information, forward road gradient information, and forward road curvature information on the driving route, And can generate the message including the confirmed travel environment information and attribute information of the running road of the vehicle.
개시된 차량 및 그 제어방법의 일 실시예에 따르면, 내비게이션이 주행 환경 정보 확인 가능 상태로 회복한 직후 확인한 주행 환경 정보를 놓치지 않고 정확하게 수신할 수 있다.According to one embodiment of the disclosed vehicle and the control method thereof, it is possible to accurately receive the travel environment information confirmed immediately after the navigation is restored to the travel environment information checkable state.
개시된 차량 및 그 제어방법의 다른 실시예에 따르면, 내비게이션이 주행 환경 정보 확인 불능 상태일 때 차량이 주행 경로 상에 존재하면, 차륜 속도를 이용하여 끊김 없이 주행 제어를 유지할 수 있다.According to the disclosed vehicle and another embodiment of the control method thereof, when the vehicle is present on the driving route when the navigation is unable to confirm the traveling environment information, the driving control can be continuously maintained using the wheel speed.
도 1은 일 실시예에 따른 차량의 외관을 도시한 도면이다.
도 2는 일 실시예에 따른 차량의 내부 구성을 나타낸 도면이다.
도 3은 일 실시예에 따른 차량의 제어 블록도이다.
도 4는 일 실시예에 따른 차량의 내비게이션 상태에 대한 버퍼에 저장되는 카운터 값을 설명하기 위한 도면이다.
도 5a 및 5b는 여러 가지 실시예에 따른 제어부가 구동부 제어 중단 여부를 결정하는 방법을 설명하기 위한 도면이다.
도 6은 일 실시예에 따른 차량 제어방법의 흐름도이다.
도 7은 다른 실시예에 따른 차량 제어방법의 흐름도이다.1 is a view showing the appearance of a vehicle according to an embodiment.
2 is a view showing an internal configuration of a vehicle according to an embodiment.
3 is a control block diagram of a vehicle according to an embodiment.
4 is a view for explaining a counter value stored in a buffer for a navigation state of a vehicle according to an embodiment.
FIGS. 5A and 5B are diagrams for explaining a method for determining whether or not the control unit according to various embodiments stops the driving unit control.
6 is a flowchart of a vehicle control method according to an embodiment.
7 is a flowchart of a vehicle control method according to another embodiment.
이하 첨부된 도면을 참조하여 차량 및 그 제어방법을 상세하게 설명하도록 한다.DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS Hereinafter, a vehicle and a control method thereof will be described in detail with reference to the accompanying drawings.
도 1은 일 실시예에 따른 차량의 외관을 도시한 도면이다.1 is a view showing the appearance of a vehicle according to an embodiment.
도 1과 같이, 차량의 일 실시예는 차량(1)의 외관을 형성하는 본체(10), 차량(1)을 이동시키는 차륜(21, 22), 차량(1) 내부를 외부로부터 차폐시키는 도어(14), 차량(1) 내부의 운전자에게 차량(1) 전방의 시야를 제공하는 전면 유리(17), 운전자에게 차량(1) 후방의 시야를 제공하는 사이드 미러(18, 19)를 포함한다. As shown in Fig. 1, an embodiment of a vehicle includes a
차륜(21, 22)은 차량의 전방에 마련되는 전륜(21), 차량의 후방에 마련되는 후륜(22)을 포함하며, 전륜(21) 또는 후륜(22)은 구동부(400)로부터 회전력을 제공받아 본체(10)를 전방 또는 후방으로 이동시킬 수 있다. The
도어(14)는 본체(10)의 좌측 및 우측에 회동 가능하게 마련되어 개방 시에 운전자가 차량(1)의 내부에 탑승할 수 있도록 하며, 폐쇄 시에 차량(1)의 내부를 외부로부터 차폐시킨다.The
전면 유리(17)는 본체(10)의 전방 상측에 마련되어 차량(1) 내부의 운전자가 차량(1) 전방의 시각 정보를 획득할 수 있도록 하는 것으로서, 윈드쉴드 글라스(Windshield Glass)라고도 한다. The
또한, 사이드 미러(18, 19)는 본체(10)의 좌측에 마련되는 좌측 사이드 미러(18) 및 우측에 마련되는 우측 사이드 미러(19)를 포함하며, 차량(1) 내부의 운전자가 차량(1) 측면 및 후방의 시각 정보를 획득할 수 있도록 한다.The side mirrors 18 and 19 include a
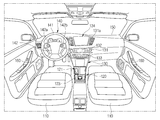
도 2는 일 실시예에 따른 차량의 내부 구성을 나타낸 도면이다.2 is a view showing an internal configuration of a vehicle according to an embodiment.
도 2에 도시된 바와 같이, 차량(1)은 운전자 등이 탑승하는 시트(110)와, 기어 박스(120), 센터페시아(130) 및 스티어링 휠(140) 등이 마련된 대시보드(150)(dashboard) 를 포함할 수 있다.2, the
기어 박스(120)에는 차량(1) 변속을 위한 변속 레버(124)와, 차량(1)의 기능 수행을 제어하기 위한 다이얼 조작부(123)가 설치될 수 있다.The
대시보드(150)에 마련된 스티어링 휠(140)은 차량(1)의 주행 방향을 조절하기 위한 장치로, 운전자에 의해 파지되는 림(141) 및 차량(1)의 조향 장치와 연결되고 림(141)과 조향을 위한 회전축의 허브를 연결하는 스포크(142)를 포함할 수 있다. 실시 예에 따라서 스포크(142)에는 차량(1) 내의 각종 장치, 일례로 오디오 장치 등을 제어하기 위한 조작 장치(142a, 142b)가 형성될 수 있다. The
대시보드(150)에 마련된 센터페시아(130)에는 공조 장치(131), 시계(132), 오디오 장치(133) 및 디스플레이(134) 등이 설치될 수 있다. An
공조 장치(131)는 차량(1) 내부의 온도, 습도, 공기의 청정도, 공기의 흐름을 조절하여 차량(1)의 내부를 쾌적하게 유지한다. 공조 장치(131)는 센터페시아(130)에 설치되고 공기를 토출하는 적어도 하나의 토출구(131a)를 포함할 수 있다. 센터페시아(130)에는 공조 장치(131) 등을 제어하기 위한 버튼이나 다이얼 등이 설치될 수 있다. 운전자 등의 탑승자는 센터페시아(130)에 배치된 버튼을 이용하여 공조 장치(131)를 제어할 수 있다. The
시계(132)는 공조 장치(131)를 제어하기 위한 버튼이나 다이얼 주위에 마련될 수 있다.The
오디오 장치(133)는 오디오 장치(133)의 기능 수행을 위한 다수의 버튼들이 마련된 조작패널을 포함할 수 있다. 오디오 장치(133)는 라디오 기능을 제공하는 라디오 모드와 오디오 파일이 담긴 다양한 저장매체의 오디오 파일을 재생하는 미디어 모드를 제공할 수 있다. The
디스플레이(134)는 운전자에게 차량(1)과 관련된 정보를 이미지, 또는 텍스트의 형태로 제공하는 UI(User Interface)를 제공할 수 있다. 이를 위해, 디스플레이(134)는 센터페시아(130)에 매립되어 형성될 수 있다. 다만, 디스플레이의 설치 예가 이에 한정되는 것은 아니며, 디스플레이(134)는 차량(1)의 센터페시아(130)와 분리 가능하도록 마련될 수도 있다. The
이 때, 디스플레이(134)는 LCD(Liquid Crystal Display), LED(Light Emitting Diode), PDP(Plasma Display Panel), OLED(Organic Light Emitting Diode), CRT(Cathode Ray Tube) 등으로 구현될 수 있으나, 이에 한정되지는 않는다.At this time, the
또한, 디스플레이(134)는 터치 입력을 감지할 수 있도록 터치 패널을 포함할 수도 있다. 이를 통해, 디스플레이는 외부로부터 터치 입력을 통한 제어 명령을 입력 받고, 제어 명령에 따라 동작을 수행할 수도 있다.In addition, the
또한, 대시보드(150)는 차량(1)의 주행 속도, 엔진 회전 수 또는 연료 잔량 등을 표시할 수 있는 각종 계기판 및 각종 물건을 수납할 수 있는 글로브 박스(Glove box) 등을 더 포함할 수도 있다. The
한편, 차량은 미리 정해진 주행 경로 상의 주행 환경 정보를 확인하고, 이를 기초로 자율 주행을 수행할 수 있다. 예를 들어, 차량은 전방 2km에 과속 단속 카메라가 존재함을 확인하고, 과속 단속 카메라의 존재를 확인한 이후부터 과속 단속 카메라에 의한 과속 단속 지점을 통과하는 시점까지 미리 정해진 주행 속도를 유지할 수 있다.On the other hand, the vehicle confirms the travel environment information on the predetermined travel route, and can perform autonomous travel based on the information. For example, the vehicle can confirm that the overspeed intermittent camera exists in the forward 2 km, and can maintain the predetermined traveling speed from the time of confirming the presence of the overspeed intermittent camera to the point of passing the overspeed interception point by the overspeed intermittent camera.
이와 같은 자율 주행을 위해, 차량의 내비게이션(200)은 주행 환경 정보를 차량의 제어부(300)로 전송할 필요가 있다. 만약, 내비게이션(200)이 수시로 동일한 주행 환경 정보를 제어부(300)로 전송하는 경우, 양자 간 통신의 부하가 증가할 수 있다. For such autonomous driving, the
이를 해결하기 위해, 차량의 내비게이션(200)은 주행 확인 정보가 확인되면, 이를 제어부(300)로 1회 전송하고, 제어부(300)는 이를 저장한 후 차량의 위치 정보를 이용하여 자율 주행을 수행할 수 있다. 그 결과, 내비게이션(200)과 제어부(300) 간의 통신 부하가 낮아질 수 있다.In order to solve this problem, when the navigation confirmation information of the vehicle is confirmed, the
그러나, 내비게이션(200)은 주행 환경 정보를 1회만 전송하므로, 제어부(300)가 내비게이션(200)에서 전송하는 주행 환경 정보를 수신하지 못하는 경우, 차량은 해당 주행 환경 정보에 따라 자율 주행을 수행할 수 없다. 특히, 내비게이션(200)이 주행 경로의 재 탐색을 수행하여 주행 환경 정보 확인이 불능하였다가 경로 재 탐색이 완료된 직후 확인한 주행 환경 정보를 제어부(300)가 놓치는 경우, 운전자는 차량의 자율 주행이 갑작스럽게 중단됨으로써 불안감을 느낄 수 있다.However, since the
이를 해결하기 위해, 일 실시예에 따른 차량은 내비게이션(200)이 주행 환경 정보 확인 불능 상태에서 확인 가능 상태를 회복한 직후 확인된 주행 환경 정보를 이용하여 주행을 제어할 수 있다.In order to solve this problem, the vehicle according to the embodiment can control the traveling using the checked traveling environment information immediately after the
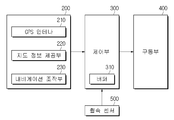
도 3은 일 실시예에 따른 차량의 제어 블록도이다.3 is a control block diagram of a vehicle according to an embodiment.
도 3을 참조하면, 일 실시예에 따른 차량은 주행을 위한 회전력을 제공하는 구동부(400); 미리 정해진 주행 경로 상의 환경 정보를 확인하고, 확인된 주행 환경 정보를 포함하는 메시지를 생성하는 내비게이션(200); 생성된 메시지의 주행 환경 정보가 갱신된 것으로 결정되면, 주행 환경 정보에 기초하여 주행하도록 구동부(400)를 제어하는 제어부(300); 및 구동부(400)로부터 회전력을 제공받는 차륜의 회전 속도를 감지하는 휠속 센서(500); 를 포함할 수 있다.Referring to FIG. 3, a vehicle according to an embodiment includes a
구동부(400)는 상술한 차륜에 회전력을 제공할 수 있다. 회전력을 제공받은 차륜의 회전을 통해, 차량은 주행을 수행할 수 있다. 이를 위해, 구동부(400)는 모터로서 구현될 수 있으나, 이에 한정되지는 않는다.The driving
휠속 센서(500)는 구동부(400)로부터 회전력을 제공받는 차륜의 회전 속도를 감지할 수 있다. 이를 위해, 휠속 센서(500)는 차륜에 인접하여 마련될 수 있으나, 이에 한정되지는 않는다.The
내비게이션(200)은 위성 신호를 통해 확인된 차량의 위치 좌표를 미리 저장된 지도 상에 매칭(Matching)함으로써 차량의 위치 정보 및 주행 환경 정보를 확인하고 이를 제어부(300)에 제공할 수 있다. 이를 위해, 일 실시예에 따른 내비게이션(200)은 위성 신호를 수신하는 GPS(Global Positioning System) 안테나(210); 지리적 정보를 포함하는 지도를 제공하는 지도 정보 제공부(220); 및 외부의 제어 명령을 입력 받은 내비게이션(200) 조작부(230); 를 포함할 수 있다.The
내비게이션(200)은 내비게이션(200) 조작부(230)를 통해 외부로부터 제어 명령을 입력 받고, 제어 명령에 따라 동작을 수행할 수 있다. 예를 들어 내비게이션(200) 조작부(230)는 전원 온/오프 명령, 볼륨 조절 명령, 목적지 선택 명령 등을 입력 받을 수 있다. 또한, 내비게이션(200) 조작부(230)는 주행 경로 탐색 명령, 주행 경로 재 탐색 명령도 입력 받을 수 있다.The
이를 위해, 내비게이션(200) 조작부(230)는 스포크(142) 상에 마련되는 조작 장치(142a, 142b), 기어 박스(120)에 마련되는 다이얼 조작부(123), 터치 패널을 포함하는 디스플레이(134)의 형태로 구현될 수 있다.To this end, the
내비게이션(200)은 GPS 안테나(210)를 통해 GPS 위성에서 전파하는 위성 신호를 수신할 수 있다. 이 때, 위성 신호는 GPS 안테나(210), 즉 차량의 위치 좌표를 포함할 수 있다.The
위치 좌표 획득 후, 내비게이션(200)은 지도 정보 제공부(220)에서 제공하는 지도 상에 획득한 위치 좌표를 매칭할 수 있다. 이를 위해, 지도 정보 제공부(220)는 지도를 미리 저장할 수 있다.After acquiring the position coordinates, the
구체적으로, 지도 정보 제공부(220)는 정밀 지도를 미리 저장할 수 있다. 여기서, 정밀 지도란 안전하고 정밀한 차량제어를 위해 높은 정확도를 가지며, 도로의 평면 위치뿐만 아니라 고도, 경사, 곡률, 차로 수 등에 대한 정보를 포함하고, 아울러 교통 규제 표지, 신호등, 과속 단속 카메라와 같은 도로 시설물에 대한 정보를 더 포함하는 지도를 의미할 수 있다. 또한, 정밀 지도는 도로의 속성 정보를 포함할 수 있으며, 여기서 도로의 속성 정보란 도로의 링크(Link) 정보를 의미하며, 링크 정보의 예로 일반도로, 고속도로, 고가도로, 교량, 터널, 지하차도, 분기점, 합류점 등을 포함할 수 있다.Specifically, the map
이를 위해, 지도 정보 제공부(220)는 메모리 타입(flash memory type), 하드디스크 타입(hard disk type), 멀티미디어 카드 마이크로 타입(multimedia card micro type), 카드 타입의 메모리(예를 들어 SD 또는 XD 메모리 등), 램(Random Access Memory: RAM), SRAM(Static Random Access Memory), 롬(ROM, Read-Only Memory), EEPROM(Electrically Erasable Programmable Read-Only Memory), PROM(Programmable Read-Only Memory), 자기 메모리, 자기 디스크, 광디스크 중 적어도 하나의 타입의 저장매체를 통해 구현될 수 있다.For this purpose, the map
지도 상에 차량의 위치 좌표를 매칭한 후, 내비게이션(200)은 매칭된 지도 상에서의 차량의 위치 정보를 미리 정해진 주기마다 제어부(300)로 전송할 수 있다. 예를 들어, 내비게이션(200)은 1초마다 전기적 신호로서 차량의 위치 정보를 제어부(300)로 전송할 수 있다.After matching the position coordinates of the vehicle on the map, the
또한, 내비게이션(200)은 주행 도로의 속성 정보를 확인할 수 있다. 상술한 바와 같이, 지도 정보 제공부(220)에서 제공하는 지도에는 도로 별 속성 정보가 포함되므로, 내비게이션(200)은 차량이 위치하는 도로, 즉 주행 도로의 속성 정보를 확인할 수 있다.Further, the
또한, 내비게이션(200)은 미리 정해진 주행 경로 상의 주행 환경 정보를 확인할 수 있다. 여기서, 주행 경로는 내비게이션(200) 조작부(230)를 통해 외부로부터 입력된 목적지에 따라 미리 결정되는 주행 경로와, 목적지 입력 없이 확률에 따라 결정되는 가상 확률 경로(Most Probable Path; MPP)를 포함할 수 있다.Further, the
이 때, 확인되는 주행 환경 정보란 자율 주행을 수행하기 위한 환경 조건을 의미할 수 있으며, 예로서 전방 과속 단속 카메라 정보, 전방 과속 방지턱 정보, 전방 도로 구배 정보, 전방 도로 곡률 정보 등을 포함할 수 있으나, 이에 한정되지는 않는다.In this case, the checked driving environment information may mean an environmental condition for performing an autonomous driving, and may include, for example, information on forward speeding camera, forward speed restriction information, forward road gradient information, forward road curvature information, But is not limited thereto.
내비게이션(200)은 해당 환경 조건으로부터 미리 정해진 거리 또는 영역 내에 진입하는 시점에 대응되는 주행 환경 정보를 1회 확인할 수 있다. 예를 들어, 주행 경로 상의 전방 과속 단속 카메라로부터 2km의 거리에 차량이 진입할 때, 내비게이션(200)은 과속 단속 카메라가 2km 전방에 존재한다는 주행 환경 정보를 확인할 수 있다. The
내비게이션(200)은 미리 정해진 주기마다 전송하는 위치 정보와 별개로, 주행 환경 정보와 주행 도로 속성 정보를 포함하는 메시지를 생성하여 제어부(300)로 1회 전송할 수 있다. 여기서, 메시지는 미리 정해진 시간 동안의 일련의 전기적 신호를 그룹화 함으로써 생성될 수 있으며, 일 실시예에 따른 메시지는 주행 도로 속성 정보, 주행 환경 정보 순으로 구성될 수 있다.The
또한, 내비게이션(200)은 생성하는 메시지에 주행 환경 정보 확인 순서에 따라 결정되는 순환식 카운터 (Cyclic Counter)를 부가할 수 있다. 여기서, 순환식 카운터는 미리 정해진 순서에 따라 순차적으로 결정될 수 있으며, 마지막 카운터 값 다음 순서는 최선의 카운터 값이 된다. 예를 들어, 순환식 카운터는 0-1-2-3-0-1-2-3-0?? 의 순서로 순환할 수 있다.In addition, the
구체적으로, 내비게이션(200)은 메시지의 가장 앞부분에 순환식 카운터 중 어느 하나를 부가할 수 있다. 상술한 순서에 따른 순환식 카운터를 채택하고, 제 1 메시지의 앞 부분에 카운터 값 0이 부가된 경우, 제 1 메시지의 다음으로 생성된 제 2 메시지의 앞 부분에는 카운터 값 1이 부가될 수 있다.Specifically, the
제어부(300)는 내비게이션(200)으로부터 전송받은 메시지를 통해 주행 환경 정보가 갱신된 것으로 결정되면, 버퍼(310)에 저장할 수 있다. 주행 환경 정보 갱신 여부를 결정하기 위해, 제어부(300)는 메시지에 부가된 카운터를 이용할 수 있다.The
구체적으로, 제어부(300)는 내비게이션(200)으로부터 수신한 제 1 메시지의 주행 환경 정보가 갱신된 것으로 결정되면, 제 1 메시지에 부가된 제 1 카운터를 버퍼(310)에 저장할 수 있다. 그 다음, 제어부(300)는 내비게이션(200)으로부터 수신한 제 2 메시지의 주행 환경 정보가 갱신된 것인지 결정하기 위해, 제 2 메시지에 부가된 제 2 카운터를 버퍼(310)에 저장된 제 1 카운터를 비교할 수 있다. 순환식 카운터의 미리 정해진 순서에 따를 때 제 2 카운터가 제 1 카운터의 다음 순서인 경우, 제어부(300)는 제 2 메시지의 주행 환경 정보가 갱신된 것으로 결정할 수 있다. 이 경우, 제어부(300)는 버퍼(310)에 저장된 제 1 카운터를 제 2 카운터로 변환하여 저장할 수 있다. 반면, 제 2 카운터가 제 1 카운터의 다음 순서가 아닌 경우, 제어부(300)는 제 2 메시지의 주행 환경 정보가 갱신되지 않은 것으로 판단하고, 제 2 메시지를 무시할 수 있다.Specifically, when it is determined that the travel environment information of the first message received from the
주행 환경 정보가 갱신된 것으로 결정되면, 제어부(300)는 해당 주행 환경 정보를 버퍼(310)에 저장하고, 이에 대응하는 주행 제어를 수행할 수 있다. 예를 들어, 주행 환경 정보가 2km 전방에 과속 단속 카메라가 존재함을 알리는 것이라면, 제어부(300)는 과속 단속 카메라에 대응되는 주행 속도로 주행하도록 구동부(400)를 제어할 수 있다. If it is determined that the travel environment information has been updated, the
이 때, 해당 주행 환경 정보는 1회만 수신되므로, 제어부(300)는 내비게이션(200)으로부터 미리 정해진 시간 간격으로 수신하는 위치 정보를 이용하여 해당 제어를 유지할 수 있다. 예를 들어, 1초 간격으로 위치 정보를 수신하는 경우, 제어부(300)는 초당 차량의 실제 이동거리에 따라 주행 속도를 조절할 수 있다.At this time, since only the travel environment information is received once, the
한편, 내비게이션(200)은 주행 환경 정보 확인 불능 상태에 놓일 수 있다. 이 때, 주행 환경 정보 확인 불능 상태란 주행 경로의 재 탐색을 수행하는 동안 주행 환경 정보를 확인하는 것이 불능한 상태를 의미하며, 내비게이션(200)이 외부로부터 경로 재 탐색 명령을 입력 받거나, 미리 정해진 시간 간격마다 내비게이션(200) 자체적으로 경로 재 탐색을 수행하는 경우, 또는 차량의 실제 이동 경로가 주행 경로를 이탈하는 경우 발생할 수 있다.On the other hand, the
경로 재 탐색이 완료되면, 내비게이션(200)은 다시 주행 환경 정보 확인 가능 상태로 회복할 수 있다. 경로 재 탐색을 통해 새로운 주행 경로가 설정되거나 종래의 주행 경로를 유지하는 경우, 내비게이션(200)은 경로 재 탐색 완료 직후에 확인되는 주행 환경 정보를 포함하는 메시지에 카운터를 부가하여 제어부(300)로 전송할 수 있다.When the route re-searching is completed, the
이 때, 부가되는 카운터 값이 주행 환경 정보 확인 불능 상태 진입 시점, 또는 진입 직전에 수신한 메시지의 카운터 값과의 관계에서 미리 정해진 순서를 따르지 않는 경우가 발생할 수 있다. 만약 경로 재 탐색 완료 직후에 확인되는 주행 환경 정보를 포함하는 메시지에 미리 정해진 순서를 따르지 않는 카운터 값이 부가된 경우, 제어부(300)는 해당 메시지의 주행 환경 정보가 갱신되지 않은 것으로 결정하여 무시할 수 있다. At this time, there may occur a case where the added counter value does not follow a predetermined order in the relationship with the entry of the travel environment information incapability state or in the relation with the counter value of the message received just before entering. If a counter value that does not follow a predetermined order is added to a message including travel environment information confirmed immediately after the completion of the route re-search, the
상술한 바와 같이, 내비게이션(200)은 특정 주행 환경 정보를 포함하는 메시지를 1회만 전송하므로, 제어부(300)는 무시한 메시지에 포함되는 주행 환경 정보에 대응되는 자율 주행을 수행할 수가 없어 문제된다. 이하에서는, 도 4를 참조하여, 이와 같은 문제를 해결하기 위한 제어부(300)의 동작을 설명한다.As described above, since the
도 4는 일 실시예에 따른 차량의 내비게이션 상태에 대한 버퍼에 저장되는 카운터 값을 설명하기 위한 도면이다.4 is a view for explaining a counter value stored in a buffer for a navigation state of a vehicle according to an embodiment.
내비게이션(200)이 주행 환경 정보 확인 불능 상태이면, 내비게이션(200)은 주행 환경 정보 확인 불능 상태에 진입했음을 알리는 내비게이션(200) 상태 정보를 제어부(300)로 전송할 수 있다. 도 4의 (a)는 내비게이션(200) 상태 정보의 일 실시예를 나타낸다.When the
내비게이션(200) 상태 정보를 수신한 제어부(300)는 버퍼(310)에 저장된 카운터 값을 무효(Invalid) 값으로 변환하여 저장할 수 있다. 예를 들어, 순환식 카운터가 상술한 0-1-2-3-0-1-2-3?? 을 따를 때, 제어부(300)는 무효 값으로서 4를 저장할 수 있다. The
그 결과, 내비게이션(200)이 주행 환경 정보 확인 가능 상태에 진입한 직후 카운터를 부가하여 메시지를 전송하면, 제어부(300)는 카운터에 무관하게 수신한 메시지에 포함되는 주행 환경 정보에 따라 주행하도록 구동부(400)를 제어할 수 있다. 예를 들어, 제어부(300)가 무효 값으로 4를 저장한 경우, 제어부(300)는 수신한 메시지의 카운터가 0, 1, 2, 3 중 어느 하나의 정상(Normal) 값을 무효 값 4와 비교하므로, 수신한 메시지의 주행 환경 정보가 갱신된 것으로 결정할 수 있다.As a result, when the
수신한 메시지의 주행 환경 정보가 갱신된 것으로 결정되면, 제어부(300)는 해당 메시지의 정상 카운터 값을 버퍼(310)에 저장할 수 있다. 도 4의 (b)는 버퍼(310)에 저장되는 카운터 값의 상태를 나타내는 도면이다.If it is determined that the travel environment information of the received message has been updated, the
도 4와 같이, 주행 환경 정보 확인 가능 상태 회복 시점과 버퍼(310)에 카운터로서 정상 값이 저장되는 시점이 상이할 수도 있다. 이는, 내비게이션(200)이 상태 회복 시점 이후 최초로 주행 환경 정보를 확인하고, 제어부(300)에서 이를 수신하는데 소요되는 시간 α 가 요구되기 때문이다.As shown in FIG. 4, the traveling environment information checkable state recovery point may be different from the time point at which the normal value is stored in the
또한, 내비게이션(200)이 주행 환경 정보 확인 불능 상태에 있을 때, 제어부(300)는 내비게이션(200)으로부터 수신되는 메시지는 모두 무시할 수 있다. 따라서, 제어부(300)의 버퍼(310)에는 무효 값이 계속하여 유지될 수 있다.Also, when the
이 때, 제어부(300)는 주행 환경 정보 확인 불능 상태 진입 시점에 차량의 위치에 기초하여 구동부(400) 제어의 중단 여부를 결정할 수 있다. 구체적으로, 제어부(300)는 주행 환경 정보 확인 불능 상태 진입 시점에 차량이 주행 경로 상에 위치하는지 여부에 따라 구동부(400) 제어의 중단 여부를 결정할 수 있다.At this time, the
도 5a 및 5b는 여러 가지 실시예에 따른 제어부가 구동부 제어 중단 여부를 결정하는 방법을 설명하기 위한 도면이다. FIGS. 5A and 5B are diagrams for explaining a method for determining whether or not the control unit according to various embodiments stops the driving unit control.
도 5a는 내비게이션(200)이 주행 환경 정보 확인 불능 상태 진입 시점에 차량이 주행 경로 상에 존재하는 경우를 예시한다. 도 5a를 참조하면, 과속 단속 카메라 C 로부터 미리 정해진 거리 dr에 도달한 차량은 전방 과속 단속 카메라 정보를 주행 환경 정보로서 1회 확인할 수 있다. 그 이후, 제어 영역 S 에 진입한 차량은 전방 과속 단속 카메라 정보와 위치 정보에 따라 주행을 제어할 수 있다. 5A illustrates a case where the vehicle exists on the traveling route at the time when the
만약, 차량이 P위치에 존재할 때 내비게이션(200)이 경로 재 탐색을 시작하는 경우, 제어부(300)는 내비게이션(200)으로부터 주행 환경 정보 확인 불능 상태에 진입했음을 알리는 내비게이션(200) 상태 정보와 내비게이션(200)의 위치 정보를 수신할 수 있다. If the
제어부(300)는 위치 정보에 기초하여 차량이 주행 경로 상에 존재하는 지 여부를 판단할 수 있다. 도 5a의 경우, 차량의 실제 이동 경로 Rr과 주행 경로 Rp가 일치하므로, 제어부(300)는 차량이 주행 경로 상에 존재하는 것으로 판단할 수 있다. The
차량이 주행 경로 상에 존재하는 경우, 제어부(300)는 차륜의 회전 속도를 참조하여 구동부(400)의 제어를 유지할 수 있다. 내비게이션(200)이 경로 재 탐색을 수행하는 동안 제어부(300)는 차량의 위치 정보를 수신할 수 없으므로, 제어부(300)는 차륜의 회전 속도를 이용하여 차량의 위치를 추정하고, 이를 기초로 전방 과속 단속 카메라 C 에 대응되는 주행을 수행하도록 구동부(400)를 제어할 수 있다.When the vehicle exists on the driving route, the
반면, 도 5b는 내비게이션(200)이 주행 환경 정보 확인 불능 상태 진입 시점에 차량이 주행 경로를 이탈하여 존재하는 경우를 예시한다. 도 5b를 참조하면, 과속 단속 카메라 C 로부터 미리 정해진 거리 dr에 도달한 차량은 전방 과속 단속 카메라 정보를 주행 환경 정보로서 1회 확인할 수 있다. 그 이후, 제어 영역 S 에 진입한 차량은 전방 과속 단속 카메라 정보와 위치 정보에 따라 주행을 제어할 수 있다. On the other hand, FIG. 5B illustrates a case where the vehicle is departing from the traveling path at the time when the
만약, 차량이 P위치에 존재할 때 내비게이션(200)이 경로 재 탐색을 시작하는 경우, 제어부(300)는 내비게이션(200)으로부터 주행 환경 정보 확인 불능 상태에 진입했음을 알리는 내비게이션(200) 상태 정보와 내비게이션(200)의 위치 정보를 수신할 수 있다. If the
제어부(300)는 위치 정보에 기초하여 차량이 주행 경로 상에 존재하는 지 여부를 판단할 수 있다. 도 5b의 경우, 차량의 실제 이동 경로 Rr과 주행 경로 Rp가 상이하므로, 제어부(300)는 차량이 주행 경로를 이탈하여 존재하는 것으로 판단할 수 있다. The
차량이 주행 경로를 이탈한 경우, 제어부(300)는 전방 과속 단속 카메라 정보에 대응하여 주행하도록 구동부(400)를 제어하는 것을 중단할 수 있다. 차량이 주행 경로를 이탈하여 존재한다는 것은 운전자가 미리 정해진 주행 경로를 따라 주행할 의사가 없음을 의미할 수 있기 때문이다. When the vehicle leaves the traveling path, the
이처럼, 주행 환경 정보 수신 불능 상태 진입 시점에 차량이 주행 경로 상에 존재 하는 경우 차륜 회전 속도에 기초하여 종래의 주행 제어를 유지함으로써, 운전자에게 중단 없이 연속적인 자율 주행 환경을 제공할 수 있다.As described above, when the vehicle is present on the driving route at the time when the driving environment information reception disabled state is entered, the conventional driving control is maintained based on the wheel rotation speed, so that the driver can be provided with a continuous autonomous driving environment without interruption.
도 6은 일 실시예에 따른 차량 제어방법의 흐름도이다.6 is a flowchart of a vehicle control method according to an embodiment.
먼저, 차량의 내비게이션(200)은 주행 경로 상의 주행 환경 정보를 포함하는 메시지를 생성할 수 있다.(700) 여기서, 주행 경로는 외부의 목적지 입력에 의해 결정되거나, 목적지 선택 없이 확률적으로 결정될 수 있다.First, the
또한, 주행 환경 정보란 자율 주행을 수행하기 위한 환경 조건을 의미할 수 있으며, 예로서 전방 과속 단속 카메라 정보, 전방 과속 방지턱 정보, 전방 도로 구배 정보, 전방 도로 곡률 정보 등을 포함할 수 있으나, 이에 한정되지는 않는다.In addition, the driving environment information may mean an environmental condition for performing autonomous driving. Examples of the driving environment information include forward overspeed camera information, forward speed restriction information, forward road gradient information, and forward road curvature information. But is not limited to.
이 때, 내비게이션(200)은 메시지의 앞부분에 주행 환경 정보 확인 순서에 따라 결정되는 순환식 카운터를 부가할 수 있다.At this time, the
다음으로, 차량의 제어부(300)는 내비게이션(200)에서 생성된 메시지의 주행 환경 정보가 갱신된 것으로 결정되면, 주행 환경 정보에 따라 주행하도록 구동부(400)를 제어할 수 있다.(710) 주행 환경 정보의 갱신 여부를 판단하기 위해, 제어부(300)는 이전의 주행 환경 정보의 카운터와 수신된 메시지의 카운터를 비교할 수 있다.Next, when it is determined that the driving environment information of the message generated in the
구동부(400)의 제어 중, 제어부(300)는 내비게이션(200)이 주행 환경 정보 확인 불능 상태에 진입하였는지 확인할 수 있다.(720) 내비게이션(200)이 주행 환경 정보 확인 가능 상태라면, 제어부(300)는 반복하여 이를 확인할 수 있다.The
반면, 내비게이션(200)이 주행 환경 정보 확인 불능 상태에 진입하였다면, 제어부(300)는 진입 시점 이후 생성되는 메시지를 무시하도록, 버퍼(310)를 무효 값으로 변경하여 유지할 수 있다.(730)On the other hand, if the
그 다음, 제어부(300)는 내비게이션(200)이 주행 환경 정보 확인 가능 상태를 회복하였는지 확인할 수 있다.(740) 내비게이션(200)이 주행 환경 정보 확인 불능 상태를 유지한다면, 제어부(300)는 반복하여 이를 확인할 수 있다.Then, the
반면, 내비게이션(200)이 주행 환경 정보 확인 가능 상태를 회복하였다면, 제어부(300)는 회복 직후 생성된 메시지의 주행 환경 정보에 따라 주행하도록 구동부(400)를 제어할 수 있다.(750)On the other hand, if the
회복 직후 생성된 메시지는 카운터로서 정상 값을 포함하고, 제어부(300)는 이를 버퍼(310)에 저장된 무효 값과 비교하여 메시지의 주행 환경 정보의 갱신 여부를 판단하므로, 차량은 내비게이션(200)의 주행 환경 정보 확인 가능 상태 회복 이후 생성된 메시지에 따라 안정적으로 주행할 수 있다.Since the message generated immediately after the recovery includes a normal value as a counter and the
도 6에서는 주행 환경 정보 확인 가능 상태 회복 이후 메시지 수신을 위한 차량의 동작을 설명하였다. 도 7에서는 주행 환경 정보 확인 불능 상태에서의 차량의 동작을 설명한다.FIG. 6 illustrates the operation of the vehicle for receiving a message after the recovery of the running environment information availability state. 7, the operation of the vehicle in a state in which the traveling environment information can not be checked will be described.
도 7은 다른 실시예에 따른 차량 제어방법의 흐름도이다.7 is a flowchart of a vehicle control method according to another embodiment.
먼저, 차량의 제어부(300)는 내비게이션(200)이 주행 환경 정보 확인 불능 상태에 진입하였는지 확인할 수 있다.(800) 내비게이션(200)이 주행 환경 정보 확인 가능 상태라면, 제어부(300)는 반복하여 이를 확인할 수 있다.First, the
반면, 내비게이션(200)이 주행 환경 정보 확인 불능 상태에 진입하였다면, 제어부(300)는 진입 시점에 차량이 주행 경로를 이탈하였는지 확인할 수 있다.(810) On the other hand, if the
만약, 차량이 주행 경로를 이탈하여 존재한다면, 운전자가 더 이상 주행 경로를 따라 주행할 의사가 없다고 판단하여, 제어부(300)는 기존의 주행 환경 정보에 따라 수행하던 주행 제어를 중단할 수 있다.(820)If the vehicle is away from the driving route, the
반면, 차량이 주행 경로 상에 존재한다면, 운전자가 주행 경로를 따라 주행할 의사가 있다고 판단하여, 제어부(300)는 차륜 회전 속도를 참조하여 기존의 주행 환경 정보에 따라 수행하던 주행 제어를 유지할 수 있다.(830)On the other hand, if the vehicle exists on the traveling route, the
그 다음, 제어부(300)는 내비게이션(200)이 주행 환경 정보 확인 가능 상태를 회복하였는지 확인할 수 있다.(840) 내비게이션(200)이 주행 환경 정보 확인 불능 상태를 유지한다면, 제어부(300)는 반복하여 이를 확인할 수 있다.Then, the
반면, 내비게이션(200)이 주행 환경 정보 확인 가능 상태를 회복하였다면, 제어부(300)는 회복 직후 생성된 메시지의 주행 환경 정보에 따라 주행하도록 구동부(400)를 제어할 수 있다.(850)On the other hand, if the
이를 통해, 차량이 주행 경로를 이탈하지 않은 경우, 운전자에게 제어의 중단 없이 매끄러운 자율 주행 환경을 제공할 수 있다.Thus, when the vehicle does not deviate from the traveling path, it is possible to provide a smooth autonomous traveling environment to the driver without interruption of control.
1: 차량
200: 내비게이션
210: GPS 안테나
220: 지도 정보 제공부
230: 내비게이션 조작부
300: 제어부
310: 버퍼
400: 구동부
500: 휠속 센서1: vehicle
200: Navigation
210: GPS antenna
220: Providing map information
230: Navigation control unit
300:
310: buffer
400:
500: Wheel speed sensor
Claims (22)
미리 정해진 주행 경로 상의 주행 환경 정보를 확인하고, 상기 확인된 주행 환경 정보를 포함하는 메시지를 생성하는 내비게이션; 및
상기 생성된 메시지의 상기 주행 환경 정보가 갱신된 것으로 결정되면, 상기 주행 환경 정보에 기초하여 주행하도록 상기 구동부를 제어하는 제어부; 를 포함하고,
상기 제어부는,
상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태에 진입하면, 상기 진입 시점 이후 생성되는 상기 메시지를 무시하고,
상기 내비게이션이 상기 주행 환경 정보 확인 가능 상태를 회복하면, 상기 회복 시점 직후 생성되는 상기 메시지의 상기 주행 환경 정보에 따라 상기 구동부를 제어하는 차량.A driving unit for providing a rotational force for driving;
Navigation for confirming travel environment information on a predetermined travel route and generating a message including the confirmed travel environment information; And
A control unit that controls the driving unit to travel based on the travel environment information when it is determined that the travel environment information of the generated message is updated; Lt; / RTI >
Wherein,
When the navigation enters the disabled state of the travel environment information, ignoring the message generated after the entry point,
And controls the driving unit in accordance with the travel environment information of the message generated immediately after the recovery point when the navigation is restored to the travel environment information checkable state.
상기 내비게이션은,
상기 메시지에 상기 주행 환경 정보 확인 순서에 따라 결정되는 순환식 카운터(Cyclic Counter)를 부가하는 차량.The method according to claim 1,
The navigation system includes:
And adding a cyclic counter determined in accordance with the traveling environment information checking order to the message.
상기 제어부는,
제 1 메시지의 상기 주행 환경 정보가 갱신된 것으로 결정되면, 상기 제 1 메시지에 부가된 제 1 카운터를 저장한 후, 제 2 메시지에 부가된 제 2 카운터를 상기 저장된 제 1 카운터와 비교하여 상기 제 2 메시지의 상기 주행 환경 정보가 갱신된 것인지 여부를 결정하는 차량.3. The method of claim 2,
Wherein,
Storing the first counter added to the first message and comparing the second counter added to the second message with the stored first counter when it is determined that the running environment information of the first message is updated, 2 < / RTI > message is updated.
상기 제어부는,
상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태이면, 상기 저장된 제 1 카운터를 무효(Invalid) 값으로 변환하여 저장하는 차량.The method of claim 3,
Wherein,
And converting the stored first counter into an invalid value when the navigation system is unable to confirm the travel environment information.
상기 제어부는,
상기 내비게이션이 상기 주행 환경 정보 확인 가능 상태를 회복하면, 상기 저장된 무효 값을 상기 회복 시점 직후 생성된 제 3 메시지에 부가된 제 3 카운터로 변환하여 저장하는 차량.5. The method of claim 4,
Wherein,
And converts the stored invalidity value into a third counter added to the third message generated immediately after the recovery point, when the navigation is restored to the traveling environment information checkable state.
상기 제어부는,
상기 내비게이션의 상기 주행 환경 정보 확인 불능 상태 진입 시점에 상기 차량의 위치에 기초하여 상기 구동부 제어의 중단 여부를 결정하는 차량.The method according to claim 1,
Wherein,
And determines whether to stop the drive unit control based on the position of the vehicle at the time when the navigation environment information can not be confirmed.
상기 제어부는,
상기 내비게이션의 상기 주행 환경 정보 확인 불능 상태 진입 시점에 상기 차량이 상기 주행 경로 상에 존재하면 상기 구동부의 제어를 유지하는 차량.The method according to claim 6,
Wherein,
And maintains the control of the driving unit when the vehicle exists on the traveling path at the entry of the navigation environment information inability to confirm the navigation environment information.
상기 구동부로부터 상기 회전력을 제공받는 차륜의 회전 속도를 감지하는 휠속 센서; 를 더 포함하고,
상기 제어부는,
상기 휠속 센서의 감지 결과를 참조하여 상기 구동부의 제어를 유지하는 차량.8. The method of claim 7,
A wheel speed sensor for detecting the rotational speed of the wheel supplied with the rotational force from the driving unit; Further comprising:
Wherein,
And the control unit controls the driving unit by referring to the detection result of the wheel speed sensor.
상기 제어부는,
상기 내비게이션의 상기 주행 환경 정보 확인 불능 상태 진입 시점에 상기 차량이 상기 주행 경로를 이탈하여 존재하면 상기 구동부의 제어를 중단하는 차량.The method according to claim 6,
Wherein,
And stops the control of the driving unit when the vehicle is departing from the driving route at the entry of the navigation environment information inability to confirm the navigation environment.
상기 내비게이션은,
외부의 입력, 및 상기 차량의 상기 주행 경로 이탈 중 적어도 하나에 따라 상기 주행 환경 정보 확인 불능 상태 또는 상기 주행 환경 정보 확인 가능 상태로 변경됨을 알리는 내비게이션 상태 정보를 상기 제어부로 전송하는 차량.The method according to claim 1,
The navigation system includes:
To the control unit, navigation state information indicating that the driving environment information can not be checked or changed to the driving environment information checkable state according to at least one of an external input, an external input, and a departure of the driving route of the vehicle.
상기 내비게이션은,
상기 주행 경로 상의 전방 과속 단속 카메라 정보, 전방 과속 방지턱 정보, 전방 도로 구배 정보, 및 전방 도로 곡률 정보 중 적어도 하나를 포함하는 상기 주행 환경 정보를 확인하고, 상기 확인한 주행 환경 정보 및 상기 차량의 주행 도로의 속성 정보를 포함하는 상기 메시지를 생성하는 차량.The method according to claim 1,
The navigation system includes:
Wherein the control unit confirms the driving environment information including at least one of forward overspeed intermittent camera information on the traveling route, forward speed restriction information, forward road gradient information, and front road curvature information, The attribute information of the vehicle.
상기 생성된 메시지의 상기 주행 환경 정보가 갱신된 것으로 결정되면, 상기 주행 환경 정보에 기초하여 주행하는 단계; 를 포함하고,
상기 주행 환경 정보에 기초하여 주행하는 단계는,
상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태에 진입하면, 상기 진입 시점 이후 생성되는 상기 메시지를 무시하는 단계; 및
상기 내비게이션이 상기 주행 환경 정보 확인 가능 상태를 회복하면, 상기 회복 시점 직후 생성되는 상기 메시지의 상기 주행 환경 정보에 따라 주행하는 단계; 를 포함하는 차량의 제어방법.Generating a message in the navigation including travel environment information on a predetermined travel route; And
Running on the basis of the travel environment information if it is determined that the travel environment information of the generated message is updated; Lt; / RTI >
Wherein the step of traveling based on the travel environment information comprises:
Ignoring the message generated after the entry point when the navigation enters the disabled state of the travel environment information; And
When the navigation is restored to the travel environment information checkable state, traveling according to the travel environment information of the message generated immediately after the recovery point; And controlling the vehicle.
상기 메시지를 생성하는 단계는,
상기 메시지에 상기 주행 환경 정보 확인 순서에 따라 결정되는 순환식 카운터(Cyclic Counter)를 부가하는 차량의 제어방법.13. The method of claim 12,
Wherein the step of generating the message comprises:
And adding a cyclic counter determined in accordance with the traveling environment information checking order to the message.
상기 주행 환경 정보에 기초하여 주행하는 단계는,
제 1 메시지의 상기 주행 환경 정보가 갱신된 것으로 결정되면, 상기 제 1 메시지에 부가된 제 1 카운터를 저장한 후, 제 2 메시지에 부가된 제 2 카운터를 상기 저장된 제 1 카운터와 비교하여 상기 제 2 메시지의 상기 주행 환경 정보가 갱신된 것인지 여부를 결정하는 차량의 제어방법.14. The method of claim 13,
Wherein the step of traveling based on the travel environment information comprises:
Storing a first counter added to the first message and comparing a second counter added to the second message with the stored first counter when the traveling environment information of the first message is determined to be updated, 2 message of the vehicle is updated.
상기 진입 시점 이후 생성되는 상기 메시지를 무시하는 단계는,
상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태이면, 상기 저장된 제 1 카운터를 무효(Invalid) 값으로 변환하여 저장하는 단계; 를 포함하는 차량의 제어방법.15. The method of claim 14,
Wherein ignoring the message generated after the entry point comprises:
Converting the stored first counter into an invalid value and storing the stored first counter when the navigation system can not confirm the travel environment information; And controlling the vehicle.
상기 회복 시점 직후 생성되는 상기 메시지의 상기 주행 환경 정보에 따라 주행하는 단계는,
상기 내비게이션이 상기 주행 환경 정보 확인 가능 상태를 회복하면, 상기 저장된 무효 값을 상기 회복 시점 직후 생성된 제 3 메시지에 부가된 제 3 카운터로 변환하여 저장하는 단계; 를 포함하는 차량의 제어방법.16. The method of claim 15,
Wherein the step of traveling in accordance with the travel environment information of the message generated immediately after the recovery point,
Converting the stored invalidity value into a third counter added to the third message generated immediately after the recovery point and storing the stored invalidity value when the navigation is restored to the traveling environment information checkable state; And controlling the vehicle.
상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태에 진입하면, 상기 진입 시점 이후 생성되는 상기 메시지를 무시하는 단계는,
상기 내비게이션의 상기 주행 환경 정보 확인 불능 상태 진입 시점에 상기 차량의 위치에 기초하여 상기 구동부 제어의 중단 여부를 결정하는 단계; 를 포함하는 차량의 제어방법.13. The method of claim 12,
And ignoring the message generated after the entry point when the navigation enters the disabled state of the travel environment information,
Determining whether to stop the drive unit control based on the position of the vehicle at the time of entry of the navigation environment information inability to confirm the navigation environment; And controlling the vehicle.
상기 차량의 위치에 기초하여 상기 구동부 제어의 중단 여부를 결정하는 단계는,
상기 내비게이션의 상기 주행 환경 정보 확인 불능 상태 진입 시점에 상기 차량이 상기 주행 경로 상에 존재하면 상기 구동부 제어의 유지를 결정하는 차량의 제어방법.18. The method of claim 17,
Wherein the step of determining whether to stop the driving unit control based on the position of the vehicle includes:
And when the vehicle is present on the driving route at the time of entry of the navigation environment information inability to confirm the navigation, the control of the driver is controlled.
상기 차량의 차륜의 회전 속도를 감지하는 단계; 를 더 포함하고,
상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태에 진입하면, 상기 진입 시점 이후 생성되는 상기 메시지를 무시하는 단계는,
상기 구동부의 제어의 유지를 결정하면, 상기 차륜의 회전 속도를 참조하여 상기 구동부를 제어하는 차량의 제어방법.19. The method of claim 18,
Sensing a rotational speed of the wheel of the vehicle; Further comprising:
And ignoring the message generated after the entry point when the navigation enters the disabled state of the travel environment information,
And controlling the driving unit with reference to the rotational speed of the wheel when the control unit determines to maintain the control of the driving unit.
상기 차량의 위치에 기초하여 상기 구동부 제어의 중단 여부를 결정하는 단계는,
상기 내비게이션의 상기 주행 환경 정보 확인 불능 상태 진입 시점에 상기 차량이 상기 주행 경로를 이탈하여 존재하면 상기 구동부 제어의 중단을 결정하는 차량의 제어방법.18. The method of claim 17,
Wherein the step of determining whether to stop the driving unit control based on the position of the vehicle includes:
And stopping the driving unit control when the vehicle is departing from the driving route at the entry of the navigation environment information inability to confirm the navigation.
외부의 입력, 및 상기 차량의 상기 주행 경로 이탈 중 적어도 하나에 따라 상기 주행 환경 정보 확인 불능 상태 또는 상기 주행 환경 정보 확인 가능 상태로 변경됨을 알리는 내비게이션 상태 정보를 생성하는 단계; 를 더 포함하는 차량의 제어방법.13. The method of claim 12,
Generating navigation state information indicating that the traveling environment information can not be checked or changed to a state in which the traveling environment information can be checked according to at least one of the external input, the departure of the traveling path of the vehicle, and the like; Further comprising the steps of:
상기 메시지를 생성하는 단계는,
상기 주행 경로 상의 전방 과속 단속 카메라 정보, 전방 과속 방지턱 정보, 전방 도로 구배 정보, 및 전방 도로 곡률 정보 중 적어도 하나를 포함하는 상기 주행 환경 정보를 확인하고, 상기 확인한 주행 환경 정보 및 상기 차량의 주행 도로의 속성 정보를 포함하는 상기 메시지를 생성하는 차량의 제어방법.13. The method of claim 12,
Wherein the step of generating the message comprises:
Wherein the control unit confirms the driving environment information including at least one of forward overspeed intermittent camera information on the traveling route, forward speed restriction information, forward road gradient information, and front road curvature information, The attribute information of the vehicle.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150172591A KR102182412B1 (en) | 2015-12-04 | 2015-12-04 | Vehicle, and control method for the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150172591A KR102182412B1 (en) | 2015-12-04 | 2015-12-04 | Vehicle, and control method for the same |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170066049A true KR20170066049A (en) | 2017-06-14 |
| KR102182412B1 KR102182412B1 (en) | 2020-11-24 |
Family
ID=59218113
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150172591A KR102182412B1 (en) | 2015-12-04 | 2015-12-04 | Vehicle, and control method for the same |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102182412B1 (en) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20070032948A (en) * | 2004-07-20 | 2007-03-23 | 가부시키가이샤 나비타이무쟈판 | Route navigation device, route navigation method and program |
| JP2008056073A (en) * | 2006-08-31 | 2008-03-13 | Hitachi Ltd | Operation support device |
| JP2010122093A (en) * | 2008-11-20 | 2010-06-03 | Alpine Electronics Inc | Portable navigation device and its route searching method |
| KR101252015B1 (en) * | 2012-08-16 | 2013-04-09 | 주식회사 피엘케이 테크놀로지 | Navigation system for judging route change of vehicle |
| KR20150054442A (en) * | 2013-11-12 | 2015-05-20 | 현대모비스 주식회사 | Apparatus and method for controlling automatic driving of vehicle |
-
2015
- 2015-12-04 KR KR1020150172591A patent/KR102182412B1/en active IP Right Grant
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20070032948A (en) * | 2004-07-20 | 2007-03-23 | 가부시키가이샤 나비타이무쟈판 | Route navigation device, route navigation method and program |
| JP2008056073A (en) * | 2006-08-31 | 2008-03-13 | Hitachi Ltd | Operation support device |
| JP2010122093A (en) * | 2008-11-20 | 2010-06-03 | Alpine Electronics Inc | Portable navigation device and its route searching method |
| KR101252015B1 (en) * | 2012-08-16 | 2013-04-09 | 주식회사 피엘케이 테크놀로지 | Navigation system for judging route change of vehicle |
| KR20150054442A (en) * | 2013-11-12 | 2015-05-20 | 현대모비스 주식회사 | Apparatus and method for controlling automatic driving of vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102182412B1 (en) | 2020-11-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101782362B1 (en) | Vehicle, and control method for the same | |
| US9052998B2 (en) | Map display device, navigation device and map display method | |
| US20190061780A1 (en) | Driving assist system using navigation information and operating method thereof | |
| KR102331025B1 (en) | Image information acquisition device, vehicle and method for controlling thereof | |
| US20160068099A1 (en) | Method and system to control vehicle turn indicators | |
| WO2006070785A1 (en) | Navigation apparatus | |
| JP2011191810A (en) | Driving support for vehicle | |
| JP2014157395A (en) | Vehicle driving support system and driving support method | |
| JP2012225683A (en) | Car navigation device | |
| KR102078771B1 (en) | Vehicle, and control method for the same | |
| JP2016125952A (en) | Movement guiding apparatus, map information updating method of movement guiding apparatus, and computer program | |
| KR101570827B1 (en) | Apparatus and Method for providing safe-driving route information considering lane-changing behavior | |
| JP6160364B2 (en) | Map information update system, map information update device, map information update method, and computer program | |
| KR20180067066A (en) | Vehicle and control method thereof | |
| JP2020077308A (en) | Driving assist device, driving assist system, driving assist method, and program | |
| KR101837393B1 (en) | Vehicle, and control method for the same | |
| KR102182412B1 (en) | Vehicle, and control method for the same | |
| JP2015219155A (en) | Detour information providing device | |
| JP2005077187A (en) | In-vehicle navigation device and route guiding method | |
| US8306743B2 (en) | Route guiding apparatus | |
| KR101463145B1 (en) | Method for removing a shadow zone on guiding the Position of train and Train traffic information system | |
| JP2014081286A (en) | Navigation apparatus | |
| JP2011220688A (en) | On-vehicle navigation device | |
| JP5943482B2 (en) | Navigation device and navigation method | |
| KR20110075289A (en) | Navigation system and method for searching path |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |