KR20170056570A - 지연된 스캐닝된 방향성 반사기를 사용한 실내 위치 측위 - Google Patents
지연된 스캐닝된 방향성 반사기를 사용한 실내 위치 측위 Download PDFInfo
- Publication number
- KR20170056570A KR20170056570A KR1020177008232A KR20177008232A KR20170056570A KR 20170056570 A KR20170056570 A KR 20170056570A KR 1020177008232 A KR1020177008232 A KR 1020177008232A KR 20177008232 A KR20177008232 A KR 20177008232A KR 20170056570 A KR20170056570 A KR 20170056570A
- Authority
- KR
- South Korea
- Prior art keywords
- reflector
- delay
- signal
- mobile
- frequency
- Prior art date
Links
Images















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/42—Simultaneous measurement of distance and other co-ordinates
- G01S13/426—Scanning radar, e.g. 3D radar
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
- G01C21/206—Instruments for performing navigational calculations specially adapted for indoor navigation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/74—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems
- G01S13/75—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems using transponders powered from received waves, e.g. using passive transponders, or using passive reflectors
- G01S13/751—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems using transponders powered from received waves, e.g. using passive transponders, or using passive reflectors wherein the responder or reflector radiates a coded signal
- G01S13/753—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems using transponders powered from received waves, e.g. using passive transponders, or using passive reflectors wherein the responder or reflector radiates a coded signal using frequency selective elements, e.g. resonator
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/74—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems
- G01S13/75—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems using transponders powered from received waves, e.g. using passive transponders, or using passive reflectors
- G01S13/751—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems using transponders powered from received waves, e.g. using passive transponders, or using passive reflectors wherein the responder or reflector radiates a coded signal
- G01S13/755—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems using transponders powered from received waves, e.g. using passive transponders, or using passive reflectors wherein the responder or reflector radiates a coded signal using delay lines, e.g. acoustic delay lines
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/74—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems
- G01S13/75—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems using transponders powered from received waves, e.g. using passive transponders, or using passive reflectors
- G01S13/751—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems using transponders powered from received waves, e.g. using passive transponders, or using passive reflectors wherein the responder or reflector radiates a coded signal
- G01S13/756—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems using transponders powered from received waves, e.g. using passive transponders, or using passive reflectors wherein the responder or reflector radiates a coded signal using a signal generator for modifying the reflectivity of the reflector
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/74—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems
- G01S13/75—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems using transponders powered from received waves, e.g. using passive transponders, or using passive reflectors
- G01S13/751—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems using transponders powered from received waves, e.g. using passive transponders, or using passive reflectors wherein the responder or reflector radiates a coded signal
- G01S13/758—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems using transponders powered from received waves, e.g. using passive transponders, or using passive reflectors wherein the responder or reflector radiates a coded signal using a signal generator powered by the interrogation signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/86—Combinations of radar systems with non-radar systems, e.g. sonar, direction finder
- G01S13/867—Combination of radar systems with cameras
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/87—Combinations of radar systems, e.g. primary radar and secondary radar
- G01S13/876—Combination of several spaced transponders or reflectors of known location for determining the position of a receiver
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q15/00—Devices for reflection, refraction, diffraction or polarisation of waves radiated from an antenna, e.g. quasi-optical devices
- H01Q15/14—Reflecting surfaces; Equivalent structures
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q15/00—Devices for reflection, refraction, diffraction or polarisation of waves radiated from an antenna, e.g. quasi-optical devices
- H01Q15/14—Reflecting surfaces; Equivalent structures
- H01Q15/18—Reflecting surfaces; Equivalent structures comprising plurality of mutually inclined plane surfaces, e.g. corner reflector
Abstract
모바일 디바이스는 위치 반사기까지의 레인지는 물론 반사기에서의 방위 및 고도 도래각(AOA) 또한 측정함으로써 그 위치를 정확하게 결정한다. 모바일은 코딩된 레이더 신호를 송신하고 반사를 프로세싱하여 그 위치를 결정할 수 있다. 반사기는 모바일에 송신/수신 분리를 제공하고 그리고 반사기를 식별시킬 수 있는 내부 지연을 포함할 수 있다. 반사는 일차 및 더 지연된 이차 반사를 포함할 수 있다. 모바일은 일차 반사와 이차 반사 간 지연에 기반하여 반사기의 내부 지연을 결정할 수 있다. 레인지 및 AOA 정보는 위치를 결정하도록 반사기의 위치, 정향, 및 특성에 대한 정보와 조합될 수 있다. 일부 시스템에서, 모바일 디바이스는 단 하나의 반사기로부터의 반사를 사용하여 3-차원 공간에서 그 위치를 결정할 수 있다. 경제적으로 생산될 수 있는 반사기는 용이한 설치를 위해 낮은 프로파일이고 전력을 공급받지 않을 수 있다.
Description
본 발명은 일반적으로는 위치결정(positioning) 분야에 관한 것이고, 구체적으로는, 실내 측위(indoor location positioning)에 적합한 시스템 및 방법에 관한 것이다.
실내 위치 측위는 오늘날의 모바일 무선 디바이스 환경에서 점점 중요하게 되고 있다. 실외 측위 서비스가 기술이 이용가능하게 된 후 널리 보급되게 되는데 시간이 다소 걸린 반면, 오늘날 실내 위치 측위를 위한 애플리케이션은 이용가능한 기술적 솔루션보다 앞서 경주하고 있다. 많은 기술이 실외 위치 측위에 사용되어 왔고, 그것들 중 으뜸은 수신기가 그 위치를 정확하게 계산하는 것을 가능하게 하는 타이밍 및 레인징 신호를 송신하는 궤도 위성을 사용하는 세계 위치결정 시스템(GPS)이다. GPS에 부가하여, 셀룰러 기지국 삼각측량 및 삼변측량을 포함하여 다양한 채택도를 갖는 여러 다른 기술이 제안되어 왔다.
불행하게도, 실외 위치 측위에 채용된 기술은 실내 위치 측위에 대해서는 성능이 저조하다. 이것은 이들 시스템의 신호가 실내에서는, GPS 경우에서와 같이, 사라지든지 매우 약하든지 하거나, 또는 신호가 그것을 실내 위치결정에는 부정확하게 만드는 상당한 다중경로로 도래하기 때문이다.
일부 제안된 시스템은 무선 휴대용 디바이스의 실내 위치를 결정하는데 도움을 주도록 이용가능한 실내 와이파이 무선 신호를 사용하려고 시도한다. 불행하게도, 와이파이 라디오-주파수(RF) 환경은 시간의 흐름에 따라 예측불가능하게 변할 수 있고 그리고 이상적 조건 하에서도 측위는 수 미터의 분해능까지만 정확할 수 있을 뿐이다. 다른 제안된 시스템은 무선 디바이스의 위치를 좁히도록 블루투스 무선 프로토콜을 사용하는 무선 비컨을 채용한다. 그러한 시스템은 그러한 비컨 중 하나로의 근접을 검출하는 것에 의존하고 그래서 실내 환경에서 모든 관심 있는 지점마다 가까이에 다른 비컨을 배치할 것을 필요로 한다. 비컨으로부터 수 피트만 떨어져도, 위치의 추정은 와이파이 신호를 사용하는 것보다 더 정확하지는 않다. 이들 시스템은 근사적 위치를 확립하도록 기지의 그리고 발행된 물리적 위치와 연관된 특정 미리 등록된 코드를 갖는 비컨 또는 특정 라우터를 검출하는 것에 의존하고 그리고 그 후 수신 신호 강도 표시자(Received Signal Strength Indicator: RSSI)를 사용하여 위치를 더 좁힌다. 그러한 방법은 그것이 광대한 실내 구역에서 달성할 수 있는 최종 분해능으로 제한된다. 또한, 처음 것은 이미 이용가능한 낮은 정확도의 그리고 자주 달라지는 와이파이 신호에 의존하는 한편, 비컨 방법은 상점이 프로모션을 변경하고 내부 디스플레이를 개장할 때 물리적 관리 및 일정한 전력 소스가 필요한 다수의 능동 비컨으로, 예컨대, 백화점과 같은, 실내 구역을 뒤덮을 것을 필요로 한다. 부가적으로, 그들 방법은 가내 주거 환경에서 채택하기에는 너무 번잡하거나 너무 부정확하다. 더욱, 그러한 방법은 RSSI 측정에 의존하므로, 벽 및 바닥을 통한 신호 침투는 벽 및 바닥 침투로 개인의 위치가 정확한 방 또는 정확한 층으로까지 좁혀질 수 없으므로 상업용은 물론 또한 강화된 E911 서비스에도 주 결점을 초래한다.
실내 위치 측위를 위한 다른 제안된 시스템은, 예컨대, "Ultra-Wideband Positioning Systems", Sahinoglu, Gezici 및 Guvenc, 2008년에서 설명된 바와 같은 초광대역(UWB) 방법에 기반한다. 불행하게도, 그러한 시스템은 적절한 동작을 위한 전력 공급받는 능동 라디오-주파수 식별(RFID) 태그에 종속하고 부피가 큰 배터리를 포함할 수 있다. 소정 부근 내에서 수많은 사용자의 계속적 추적으로, 배터리 수명은 비실용적으로 짧아진다. 부가적으로, RFID 태그는 비용이 많이 든다.
다른 제안된 시스템은 실내 위치 측위를 결정하도록 코딩된 LED 조명을 사용한다. 그러한 방법은 위치를 결정하기 위해 모바일 디바이스의 카메라가 LED 조명 설비로부터 코딩된 조명 깜박거림을 검출하는 것에 의존한다. 불행하게도, 개인의 모바일 디바이스는 휴대하는 가방에 또는 주머니에 놓여 있는 시간이 상당하다. 또한, 대부분의 경우에, 새로운 LED 전구에 부응하기 위해 수많은 조명 설비의 비용이 많이 드는 교체가 필요하다. 더욱, 그러한 기술의 정확도는 수 센티미터 차수의 상업용 및 주거용 애플리케이션 요구 정확도에 충분한 분해능으로 실제 위치를 결정하기보다는, 방 내 위치와 같은, 근사적 위치를 제공할 수 있을 뿐이다. 적외선 비컨을 사용할 때 유사한 제한이 일어난다.
다른 제안된 시스템은 초음파 음파를 사용한다. 그러한 시스템은 그들 자신의 전력 소스가 필요한 다수의 무선/초음파 비컨 및/또는 수신기로 실내 공간을 개장할 것을 필요로 한다. 부가적으로, 초음파 송수신 트랜스듀서는 모바일 디바이스 또는 배터리 동작식 비컨에는 부피가 너무 크고 너무 많은 전력을 소비할 수 있다. 부가적으로, 초음파는 사람이 휴대하는 가방에서 또는 주머니 내부에서 심하게 소음된다.
일 태양에서, 하나 이상의 위치 반사기(position reflector)로서, 위치 반사기의 각각은 레이더 신호를 반사하도록 구성되고, 각각의 반사된 레이더 신호는 위치 반사기의 내부 지연만큼 지연된 일차 반사를 포함하는 하나 이상의 위치 반사기; 하나 이상의 위치 반사기와 연관된 반사기 데이터를 저장하는 서버; 및 서버로부터 반사기 데이터를 수신하고 그리고 레이더 신호를 송신하고 송신된 레이더의 반사를 프로세싱하여 모바일 디바이스의 위치를 결정하도록 구성된 모바일 디바이스를 포함하는 위치결정 시스템이 제공된다.
다른 태양에서, 전자 디바이스의 측위를 위한 방법이 제공된다. 방법은 직접 시퀀스 확산 스펙트럼 코딩된 레이더 신호를 송신하는 단계로서, 레이더 신호는 2개의 주파수 사이에서 스윕된 중심 주파수를 갖는 송신하는 단계; 복수의 위치 반사기로부터의 반사를 포함하는 레이더 신호를 수신하는 단계로서, 반사의 각각은 대응하는 위치 반사기의 내부 지연만큼 지연된 일차 반사 및 대응하는 위치 반사기의 내부 지연만큼 더 지연된 이차 반사를 포함하는 수신하는 단계; 수신된 레이더 신호에서 검출된 정보를 송신된 레이더 신호를 형성하는데 사용된 대응하는 정보와 상관시켜 반사에서 최대치를 결정하는 단계; 반사에서 결정된 최대치를 사용하여 반사에 대한 지연 정보 및 주파수 정보를 검출하는 단계; 지연 정보로부터 위치 반사기의 내부 지연에 대한 정보를 결정하는 단계; 결정된 내부 지연 정보를 사용하여 복수의 위치 반사기를 식별하는 단계; 검출된 지연 정보 및 결정된 내부 지연 정보를 사용하여 복수의 위치 반사기 중 적어도 하나까지의 레인지를 결정하는 단계; 주파수 정보를 사용하여 복수의 위치 반사기 중 적어도 하나로부터의 반사에 대한 도래각을 결정하는 단계; 및 레인지 및 도래각을 사용하여 전자 디바이스의 위치를 결정하는 단계를 포함한다.
다른 태양에서, 측위를 위한 디바이스가 제공되고, 디바이스는 하나 이상의 안테나에 결합된 라디오-주파수 전단부; 및 라디오-주파수 전단부에 결합되고 그리고 송신을 위해 라디오-주파수 전단부에 레이더 신호를 공급하고, 하나 이상의 위치 반사기로부터 반사된 신호를, 라디오-주파수 전단부로부터, 수신하고, 그리고 수신된 신호를 프로세싱하여 디바이스 송신의 위치를 결정하도록 구성된 프로세서를 포함하고, 프로세싱하는 것은 일차 반사부터 이차 반사까지의 지연을 결정하는 것을 포함한다.
본 발명의 상세는, 그 구조에 대해서도 그 동작에 대해서도, 유사한 참조 숫자가 유사한 부분을 가리키는 수반 도면을 검토함으로써 부분적으로 얻어질 수 있다:
도 1은 현재 개시된 실시형태에 따른 실내 위치결정 시스템의 기능적 블록 선도;
도 2는 현재 개시된 실시형태에 따른 일례의 측위의 예시도;
도 3은 현재 개시된 실시형태에 따른 다른 일례의 측위의 예시도;
도 4는 현재 개시된 실시형태에 따른 위치 반사기의 기능적 블록 선도;
도 5는 현재 개시된 실시형태에 따른 다른 위치 반사기의 기능적 블록 선도;
도 6은 현재 개시된 실시형태에 따른 다른 위치 반사기의 기능적 블록 선도;
도 7은 현재 개시된 실시형태에 따른 다른 위치 반사기의 기능적 블록 선도;
도 8은 현재 개시된 실시형태에 따른 다른 위치 반사기의 기능적 블록 선도;
도 9는 현재 개시된 실시형태에 따른 위치 반사기의 등측도;
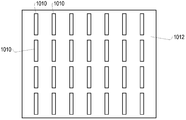
도 10은 현재 개시된 실시형태에 따른 위치 반사기의 평면도;
도 11은 현재 개시된 실시형태에 따른 다른 위치 반사기의 평면도;
도 12는 현재 개시된 실시형태에 따른 송신 및 수신 레이더 체인의 기능적 블록 선도;
도 13은 현재 개시된 실시형태에 따른 대안의 안테나 배열을 갖는 추가적 송신 및 수신 레이더 체인의 기능적 블록 선도;
도 14는 현재 개시된 실시형태에 따른 다른 대안의 안테나 배열을 갖는 추가적 송신 및 수신 레이더 체인의 기능적 블록 선도;
도 15는 현재 개시된 실시형태에 따른 측위 신호 프로세싱의 기능적 블록 선도;
도 16은 현재 개시된 실시형태에 따른 송신 측위 신호 프로세싱의 기능적 블록 선도;
도 17은 현재 개시된 실시형태에 따른 수신 측위 신호 프로세싱의 기능적 블록 선도; 및
도 18은 현재 개시된 실시형태에 따라 위치 측위를 결정하기 위한 프로세스의 순서도.
도 1은 현재 개시된 실시형태에 따른 실내 위치결정 시스템의 기능적 블록 선도;
도 2는 현재 개시된 실시형태에 따른 일례의 측위의 예시도;
도 3은 현재 개시된 실시형태에 따른 다른 일례의 측위의 예시도;
도 4는 현재 개시된 실시형태에 따른 위치 반사기의 기능적 블록 선도;
도 5는 현재 개시된 실시형태에 따른 다른 위치 반사기의 기능적 블록 선도;
도 6은 현재 개시된 실시형태에 따른 다른 위치 반사기의 기능적 블록 선도;
도 7은 현재 개시된 실시형태에 따른 다른 위치 반사기의 기능적 블록 선도;
도 8은 현재 개시된 실시형태에 따른 다른 위치 반사기의 기능적 블록 선도;
도 9는 현재 개시된 실시형태에 따른 위치 반사기의 등측도;
도 10은 현재 개시된 실시형태에 따른 위치 반사기의 평면도;
도 11은 현재 개시된 실시형태에 따른 다른 위치 반사기의 평면도;
도 12는 현재 개시된 실시형태에 따른 송신 및 수신 레이더 체인의 기능적 블록 선도;
도 13은 현재 개시된 실시형태에 따른 대안의 안테나 배열을 갖는 추가적 송신 및 수신 레이더 체인의 기능적 블록 선도;
도 14는 현재 개시된 실시형태에 따른 다른 대안의 안테나 배열을 갖는 추가적 송신 및 수신 레이더 체인의 기능적 블록 선도;
도 15는 현재 개시된 실시형태에 따른 측위 신호 프로세싱의 기능적 블록 선도;
도 16은 현재 개시된 실시형태에 따른 송신 측위 신호 프로세싱의 기능적 블록 선도;
도 17은 현재 개시된 실시형태에 따른 수신 측위 신호 프로세싱의 기능적 블록 선도; 및
도 18은 현재 개시된 실시형태에 따라 위치 측위를 결정하기 위한 프로세스의 순서도.
휴대용 무선 모바일 디바이스가 레이더 반사기를 사용하여, 예컨대, 센티미터 레벨까지 정확하게 그들 실내 위치를 결정할 수 있게 하는 시스템 및 방법이 개시된다. 내장 고정된 RF 지연을 갖는 주파수, 및/또는 코딩된 신호, 스캐닝된 재귀-지향성 또는 재귀-반사성 수동 레이더 반사기가 사용될 수 있다. 그러한 반사기는 소정 실내 공간의 천장, 벽 또는 바닥 상에 어딘가에 놓일 수 있고 그리고 그들 위치 및 정향은 모바일 디바이스에 이용가능하게 될 수 있다.
모바일 디바이스는 특수 코딩된 레이더 파형을 사용하여 그것과 소정 인근 반사기 간 거리는 물론 반사기에서의 방위 및 고도 도래각(angle of arrival: AOA) 또한 측정함으로써 그 위치를 정확하게 결정할 수 있다. 기지의 위치 및 정향의 소정 반사기에 상대적으로 그 거리 및 각도를 결정할 수 있는 것에 의해, 모바일 디바이스는 하나의 수동 반사기만을 사용하여 3-차원 공간에서의 그 위치를 결정할 수 있다. 다수의 반사기로부터의 반사를 검출하는 것은 컴퓨팅된 정확도를 증가시킬 수 있다. 더욱, 반송파 위상 레인지 결정 기술은 다양한 실내 환경 하에서 개선된 정확도를 내놓도록 채용될 수 있다. 마지막으로, 반사기의 수동 본성 및 낮은 프로파일 설계를 고려하면, 예컨대, 배선 또는 측량 없이 그것들을 천장 타일 위에 놓거나 또는 그것들을 실내 공간 내 어느 평탄한 그리고 가로막히지 않은 표면에라도 부착함으로써 상업용 환경에서도 그리고 주거용 환경에서도 그들 설치는 간단하다. 설치되고 나면, 배터리 교체 또는 재교정과 같은 유지보수는 필요하지 않다. 더욱, 그러한 반사기는 느슨한 공차를 갖는 매우 적은 수동 컴포넌트를 포함하고 있고, 그래서 생산 비용이 매우 저렴하다. 이들 반사기는 또한 전형적으로 평탄하고 눈에 띄지 않고 그리고 예컨대 건물의 건식벽 상에, 뒤에 또는 내장되어 영구적으로 설치될 수 있다.
현재 개시된 방법 및 시스템과 사용된 반사기는 다양한 형태 및 기능을 갖는다. 일부 반사기는 레인징 정보를 제공한다. 다른 반사기는 방위, 고도 또는 양자와 같은 각도 정보를 제공한다. 반사기는 또한 레인징 정보도 그리고 각도 정보도 제공할 수 있다. 반사기는 레이더 반사기, 위치 반사기, 측위 반사기, 또는 유사한 용어로 지칭될 수 있다. 부가적으로, 반사기는 특정 반사기의 특성을 설명하는 형용사를 사용하여 지칭될 수 있으며, 예컨대, 복합 반사기, 지연된 반사기, 주파수 스캐닝된 반사기, 주파수 스캐닝된 재귀-지향성 반사기, 스캐닝되지 않은 재귀-반사성 레이더 반사기, 수평 스윕 반사기, 수직 스윕 반사기, 선형 반사기, 수동 반사기, 또는 섹터링된 반사기이다.
일 실시형태에서, 모바일 디바이스는 벽 또는 천장 장착된 RF 반사기에 의해 반사될 레이더 신호를 송신하는 회로를 포함한다. 반사기는 내부 지연을 포함할 수 있다. 반사기는 주파수-스캐닝된 페이징된 어레이 유형 안테나 구조일 수 있다. 주파수 스캐닝된 페이징된 어레이 안테나 구조는 여기 주파수에 기반하여 소정 방향으로 높은 이득 로브를 가지는 안테나 구조이다(예컨대, "Antennas", 제2판, John Kraus, 1988년, 11-11절 참조). 여기 주파수가 변화됨에 따라, 안테나의 이러한 주된 높은 이득 로브의 방향각 또한 변한다. 유사한 안테나 구조가 레이더 설치에서 사용되어 왔는데 여기 주파수를 스윕하는 것에 의해 구조는 구조로부터 집중된 방사각의 방향을 스윕하도록 되어 있다. 안테나 구조의 가역 본성을 고려하면, 소정 주파수에 대해 방사가 최대화되는 방향은 또한 동일한 주파수에서 최대 수신 감도의 방향이다. 이들 유형의 안테나 구조는 그것들이 전형적으로는 페이징된 어레이 안테나 매트릭스로 이루어지더라도 하나의 접속 포트만을 갖는다. 소자의 페이징은 안테나 구조의 단일 포트로부터 구조 내 방사 소자로의 RF 전력 분배/결합 분기 트레이스에 페이징 지연을 삽입함으로써 달성된다. 위치 반사기는 방의 천장 구석에 설치될 수 있다. 그러한 경우에, 필요한 스윕 각도는 90도 미만일 수 있다. 일 실시형태에서, 이들 반사기는, 상당한 역방향 감도 없이, 방의 방향으로만 비-영 이득을 갖는 그러한 방식으로 이루어진다. 이것은 인접 방 또는 층으로부터의 신호와 상호작용하거나 반사할 가능성을 감축할 수 있다.
다른 실시형태에서, 반사기는 방위 및 고도 AOA 양자를 내놓도록 설계된다. 단일 선형 페이징된 어레이는 하나의 각도를 따른 호를 스윕할 수 있다. 반사기가 2개의 각도를 내놓는 것을 가능하게 하기 위해, 복합 반사기는 하나가 수직으로 다른 하나가 수평으로 스윕하는 2개의 병설된 반사기를 포함할 수 있다. 병설된 반사기의 각각은 다른 부-대역의 여기에 응답한다. 모바일은 각각의 부-대역에 대한 주파수 스윕을 송신하고 그리고 방위 및 고도 AOA를 별개로 검출한다. 일부 안테나는 여기 주파수의 함수로서 래스터 스캔을 산출할 수 있고 그리하여 하나의 주파수 스윕으로 방위각 및 고도각을 내놓을 수 있다.
일 실시형태에서, 모바일 디바이스는 연속적 스윕 중심 주파수를 갖는 레이더 신호를 송신한다. 어떤 순간에, 이러한 레이더 신호의 주파수는 모바일 디바이스의 방향으로 최대 안테나 이득을 초래하는 주파수와 같다. 이러한 시점에서, 모바일은 반사기로부터 되돌아 모바일로의 최대 반사 신호 전력을 검출한다. 이러한 주파수를 주목하고 그리고 모바일이 이러한 안테나 반사기에 대해 주파수의 함수로서 방사의 각도, 정향 및 위치에 대해 네트워크로부터 이미 가지고 있는 정보를 사용함으로써, 모바일은 거처하는 모바일이 따르는 안테나 구조에 상대적인 각도를 컴퓨팅할 수 있다. 부가적으로, 신호의 송신과 반사의 후속 검출 간 왕복 지연을 측정함으로써, 모바일은 또한 모바일 위치와 반사기 간 거리를 컴퓨팅할 수 있다. 반사기의 위치 및 정향에 대한 지식을 가지고 이러한 반사기까지의 거리 및 AOA를 검출하여, 모바일은 3D 공간에서의 그 위치를 계산할 수 있다. 매우 높은 정확도를 달성하기 위해, 반송파 위상 레인징 기술이 사용될 수 있다.
일 실시형태에서, 모바일은 특정 폭의 주파수를 스윕하는 레이더 신호를 송신하여 가장 높은 반사 전력을 찾는다. 가장 높은 반사 전력을 갖는 주파수는 모바일의 방향으로 최대 반사를 초래하는 주파수이다. 이러한 지점에서, 모바일은 모바일이 많이 이동하지는 않았을 수 있으므로 후속 위치 고정에 대해 주파수 스윕을 이러한 중심 주파수에 가까운 주파수로 한정할 수 있다. 이것은 검색 시간을 감축하고 송신 전력을 감축한다. 모바일에서 전력 제어를 사용하여, 즉, 최소 검출가능한 반사 전력을 갖는 반사를 초래하는 신호를 송신하도록 소정 레이더 신호에 대한 방사 전력을 감축 또는 증가시킴으로써, 모바일은 배터리 수명을 증가시키고 다른 가까운 옆 디바이스에 대한 간섭을 감축할 수 있다. 부가적으로, 반사기와 관련하여 소정 각도만큼 떨어져 있는 2개의 모바일은 안테나에 대한 그들 AOA가 다르므로 그들 레이더 신호에 대해 다른 주파수를 사용하고 있을 것이다. 이것은 하나의 반사기가 소정 구역 내 다수의 모바일 디바이스를 동시에 취급할 수 있으므로 시스템의 용량을 증가시키고 그리고 여기기의 방향으로 향한 반사기 안테나 재귀-지향성 방사 집중에 기반하는 안테나 이득 섹터화 및 상이한 주파수 때문에 최소 상호 간섭을 갖는다. 매우 가까이 공동 위치하고 있는 모바일들의 경우에는, 각각의 디바이스가 그 자신의 신호를 다른 것들의 신호와 구별할 수 있도록 시분할, 주파수 분할 또는 코드 분할 다중 액세스 기술이 사용될 수 있다.
일 실시형태에서, 반사기 안테나에서 수신된 신호는 모바일로 되돌아 재방사되기 전에 지연된다. 지연은 전형적으로는 일 마이크로초의 몇 분의 일 내지 수 마이크로초의 차수이지만 더 크거나 더 작을 수 있다. 이것은, 벌크 음향파(BAW) 디바이스, 부하 있는 지연 라인, LC 지연 라인, 표면 음향파(SAW) 디바이스 또는 다른 RF-음향 방법(예컨대, PAL TV 표준을 지원하도록 휴대용 비디오 카메라에 의해 이전에 사용된 것들과 유사함)과 같은 여러 수동 RF 컴포넌트에 의해 달성될 수 있다. 부가적으로, 신호는 그룹 지연이 임의로 길게 될 수 있는 음의 유전율 및/또는 투자율을 갖는 새롭게 개발된 메타-재료 구조를 사용함으로써 지연될 수 있다.
BAW 필터를 사용하는 실시형태의 경우에, 안테나 급전선의 입력은 BAW 필터의 일측에 정합 및 접속되는 한편, 필터의 타측은 접지에 단락된다. BAW 필터는 레이더 송신 신호에서의 에너지 전부를 통과시키도록 선택될 수 있다. 안테나에서 수신된 신호는 불가피한 부정합에 기인하여 불가피한 즉각적 반사를 갖는다. 그때 신호의 벌크는 BAW 필터에 공급된다. BAW 필터를 통한 하나의 전파 지연 시간 후에 신호는 접지로의 단락에 의해 완전 반사된다. 신호는 안테나 구조를 구동하고 모바일 디바이스의 방향으로 되돌아 재방사하기 전에 다른 하나의 전파 지연 시간을 경험한다. 이러한 실시형태에서, 모바일은 소정 반사기의 이러한 지연을 선험적으로 알고 있고 그리고 모바일과 이러한 반사기 간 참 물리적 거리를 계산하기 위해 그것을 왕복 지연 계산으로부터 감산한다.
레이더 펄스를 그것을 되돌려 송신 모바일로 반사하기 전에 지연시킴으로써 여러 이점이 달성된다. 우선, 모바일로부터의 송신 레이더 신호는 전형적 방에 대해 약 90ns 지연 스프레드 내지 쇼핑 센터에 대해 200ns 지연 스프레드를 가질 수 있다. 이것은 신호가 환경 장애물로부터의 기생 반사에 기인하는 검출가능한 전력을 계속 고집하는 시간이다(예컨대, "OFDM For Wireless Multimedia Communications", R. Van Nee 및 R. Prasad, 2000년, 1.3절 참조). 각각의 반사기에서의 수신 신호를 이러한 시간보다 더 긴 시간만큼 지연시킴으로써, 거울 또는 전기적으로 큰 금속 물체로부터와 같은, 기생 환경 반사에 기인하는 거짓 위치 결정은 제거되는데 최소 반사기 지연보다 더 긴 지연 후에 수신된 신호는 반사기로부터만 유래할 수 있기 때문이다. 그래도, 전도 물체에서 그 진로를 따라 모바일로 또한 반사하는 반사기로부터의 반사 신호를 여전히 얻는 것이 가능하다. 이러한 다중경로 기생 신호는 반사기에서의 지연에 기인하는 직접적 기생 반사보다 훨씬 더 낮은 발생 확률을 가지고 그리고 그 효과는 반사기가 시선 반사의 확률을 최대화하는 장소에 놓임을 확실히 함으로써 더 감축될 수 있다. 또한, 대부분의 경우에, 큰 기생 반사기는 벽 상에 또는 그 가까이에 위치하고 있다. 모바일이 또한 반사기에서의 입사각을 알고 있기 때문에, 그리고 그러한 반사기가 방 표면에 가까이 있기 때문에, 잘못된 컴퓨팅된 위치는 전형적으로 방 범위에 기인하는 비논리적 물리적 위치를 초래하고 그에 따라 다뤄질 수 있다.
부가적으로, 반사기에 삽입된 내부 지연은 모바일이, 광속을 사용하여 물리적 공간에 매핑될 때, 모바일 디바이스와 반사기 간 전형적 최대 실내 거리보다 훨씬 더 긴 레이더 파를 송신할 수 있게 하는 한편, 동시에 여전히 송신 신호와 반사 신호가 모바일에서 중첩하지 않을 수 있게 한다. 더 긴 레이더 신호는 송신기에 대해 더 높은 거리 분해능 및 더 양호한 더 낮은 피크 대 평균 비를 초래한다. 비-중첩은 또한 모바일이 신호 송신 모드에 대해서든 반사 수신 모드에 대해서든 교번 비-중첩 시간을 할당할 수 있음을 의미한다. 교번 비중첩 시간으로 송신 및 수신 동작 모드를 스케줄링함으로써, 되돌아 RX 측으로의 TX 신호 누설은 TX와 RX가 동시에 일어나지 않음에 기인하여 회피되므로 수신기 전단 회로는 크게 단순화된다.
부가적으로, 레이더 신호는 직접 시퀀스 확산 스펙트럼(direct sequence spread spectrum: DSSS) 위상 변조를 사용하여 인코딩될 수 있다. 이들 시스템에서, 내부 반사기 지연은 내장 반사기 지연이 하나보다 많은 칩 지연 분리를 보장하면 송신 신호와 그 반사 간 구별하는 것을 용이하게 한다.
소정 반사기 내 신호의 지연은 알려져 있을 수 있고 연속 기반으로 타이트 제어될 수 있다. 이것은 이러한 지연이 왕복 지연에 직접 부가되고 그리고, 온도 드리프트 또는 컴포넌트 노화에 기인하는, 그 이전에 발행된 지연과 실제 지연 간 어느 불일치라도 모바일 디바이스와 반사기 간 거리를 컴퓨팅하는데 직접적 오차를 초래하기 때문이다. 실제 지연을 연속적으로 측정하고 주기적 교정 프로세스에 의해 적시 방식으로 재발행하는 것이 가능하기는 하지만, 여기에서 개시된 교번 실시형태는 이것을 교번 방식으로 다룬다.
일 실시형태에서, 반사기는 수신된 레이더 신호를 지연시키도록 BAW 필터를 사용한다. 모든 전력을 반사하는 대신에, 반사기는 수신 신호에 대해 BAW 디바이스에 안테나 구조의 임피던스를 정합시키는 방향성 결합기를 내부적으로 사용한다. BAW의 타측 상에서 접지로의 단락에 의해 반사된 BAW 내 신호는 BAW의 입력 포트로 향하여 반사된다. 이러한 방향으로, 원래 신호의 일부가 안테나 구조로 되돌아 결합하고 모바일로 되돌아 방사되는 한편 나머지 부분이 BAW로 되돌아 반사되게 하는 의도적 부정합이 존재한다. 이러한 전향된 나머지 부분 중 일부는 BAW 내 다른 왕복 지연 후 안테나에 결합할 수 있게 되고 그리고 사이클은 반복된다. 예컨대, 일 실시형태에서, 부정합은 원래 신호의 4/5 또는 -1dB가 안테나에 결합할 수 있게 하고 1/5을 다시 사이클링할 것이다. 제2 반사 상에서, 안테나는 원래 신호의 4/5 x 1/5 = 4/25 또는 약 -8dB을 재방사할 것이다. 다음 반사는 4/5 * 1/5 * 1/5 = 4/125 등일 것이다. 여기에서 중요한 사실은 모바일이 2 곱하기 BAW 지연 더하기 자유 대기 왕복 지연 후에 신호의 일부를 수신할 것이라는 것이다. 그것은 나중에 정확히 4 곱하기 BAW 지연 더하기 동일한 자유 대기 왕복 지연에서 다른 신호를 수신할 것이다. 이들 2개의 눈금값을 고려하면, 모바일은 BAW 왕복 지연을 정확하게 측정하고, 그것을 제1 반사 왕복 지연의 측정치로부터 감산하고 그리하여 모바일로부터 반사기까지의 거리를 정확하게 결정할 수 있다. 이것은 온 더 플라이 행해지므로, 반사기의 설치 후에 교정, 정합 또는 측정이 반복될 필요가 없는데 모바일이 온도 및 컴포넌트 노화에 기인하는 가능한 작은 지연 드리프트에 대해 조절할 수 있기 때문이다. BAW 그룹 지연에 부과된 제조 공차는 상당히 완화될 수 있고 그리고 발행된 반사기 지연은 근사적일 필요가 있을 뿐이다. 설계 절충은 어떤 비율을 되돌아 안테나로 결합할지 그리고 어떤 부분을 되돌아 BAW로 반사할지 선택하는 것을 수반한다. 많은 부분이 안테나에 결합하게 하는 것은 제1 반사의 SNR을 증가시키지만 후속 반사는 검출하기에 너무 약할 수 있다. 대조적으로, 많은 부분을 되돌아 BAW에 결합시키는 것은 제1 반사를 약화시키고 그리고 구조는 오랜 시간 동안 잔류 에너지를 재-방사하기를 계속한다. 예컨대, ¼이 선택되면, 안테나로부터의 제1 반사는 원래 수신 전력으로부터 아래 -1.25dB일 것이다. 제2 반사는 원래 수신 전력으로부터 아래 약 -7dB일 것이고 그리고 제3 반사는 -13.25dB 등이다. 대안으로, 1/10이 사용되면, 반사 신호 전력은 각각 -1dB, -10.45dB, -19.9dB일 것이다. 모바일은 제2 반사를 한 번만 프로세싱할 필요가 있을 뿐이고, 그 후에 모바일은 BAW에서의 지연이 단시간 기간에 눈에 띄게 변할 것으로 예상되지 않으므로 제1 반사를 프로세싱할 필요가 있을 뿐임을 주목한다. 더욱, 강력한 신뢰도를 갖는 이러한 반사기 지연 결정을 수행한 모바일 디바이스는 이러한 측정 값을 신뢰도 표시자와 함께 다른 모바일에 의해 사용되도록 공중 서버에 업로드한다. 교정 신뢰도에 종속하여, 다른 모바일은 스스로 측정을 반복하기보다는 이러한 최근 발행된 값을 사용하기를 택할 수 있다. 우리는 명확함을 위해 지연 소자 삽입 손실을 무시하였음을 주목한다. 실제로, 반사 신호는 지연 소자 내에서의 각각의 왕복 전파에 대해 지연 소자의 2개의 삽입 손실을 발생시킬 것이다. 우리는 또한 BAW 필터가 일례로서 지연에 사용된다고 가정하였다. 다른 지연 소자도 사용될 수 있다.
지금까지 우리는 모바일이 소정 반사기로부터의 그 거리를 그 반사기에서의 AOA에 부가하여 어떻게 결정할 수 있는지 설명하였다. 모바일이 그 위치를 올바르게 결정하기 위해, 그것은, 부근에 하나보다 많은 반사기가 있는 경우에, 소정 신호 반사가 어느 반사기로부터 유래하고 있는지 결정하여야 한다. 그것은 또한 그 반사기의 위치 및 정향을 각각의 반사기에 대한 주파수 대 AOA 도래 특성 및 반사기의 제1 반사에 대한 부분 반사 전력 비와 함께 알고 있어야 한다. 주파수 대 AOA 도래 특성, 근사적 매립된 지연, 및 제1 반사에 대한 부분 반사 전력 비율은 그러한 반사기의 제조 프로세스 동안 측정에 의해서든 설계에 의해서든 결정될 수 있고 그리고 고유 반사기 유형 번호는 소정 반사기 변종과 연관된 각각의 구별되는 특성과 연관될 수 있다. 설치 동안, 각각의 설치되는 반사기의 물리적 위치 및 정향에 대한 엔트리, 주파수 특성 번호, 및 반사기 ID 번호를 포함하고 있는 룩업 테이블이 파퓰레이팅된다. 부가적으로, 있는 경우, 각각의 반사기가 채용하는 근사적 내장 지연을 제공하는 엔트리도 테이블에 포함된다. 이러한 정보는, 국부적이든 전역적이든, 인터넷 클라우드에서의 소정 서버 상에 상주하게 되고, 그리고 소정 부근 내 위치 측위 고정을 수행하도록 허용되는 모든 디바이스가 액세스가능하게 된다. 반사기의 위치 및 정향은 표준 지리적 측량 및 위치결정 데이터에 상대적으로 주어지거나 실내 랜드마크에 상대적으로 주어질 수 있다. 반사기 지연의 정확한 테이블 작성은 모바일이 위에서 설명된 부분 반사 방법으로부터 그것을 결정할 수 있으므로 엄격하게 필요한 것은 아니지만, 그럼에도 불구하고, 그것은 모바일이 가능한 반사를 경청하고 있는 시간을 감축하도록 제공될 수 있다.
모바일은 또한 소정 반사가 어느 반사기로부터 유래하고 있을 수 있는지 결정할 수 있다. 다양한 기술이 반사기 식별에 사용될 수 있다. 일 실시형태는 반사기 내, 벌크 음향파 디바이스(BAW)와 같은, 소정 지연 소자가 나타내 보이는 특성(예컨대, 지연 및/또는 필터링)에 기반한다. 이들 내장 반사기 지연은 가장 긴 자유 대기 왕복 지연보다 훨씬 더 크고 그리하여 가까운 근접 내 각각의 반사기가 그 이웃의 것들과는 다른 내장 지연을 나타내 보이게 함으로써 용이하게 구별가능할 수 있다. 또한, 이들 지연 소자들은 상이한 주파수 필터링 특성들을 가지고 그로써 올바른 반사기-반사 배정에 도움을 줄 수 있다.
다른 실시형태는 반사 대 반사기의 잘못된 매핑을 배제하도록 모바일의 기지의 이전 또는 근사적 위치를 사용한다. 예컨대, 띄엄띄엄 위치하고 있는 수 개의 반사기가 있는 공간에서, 어떤 경우에는 모바일이 단 하나의 반사기로부터 반사를 수신하는 것이 가능하다. 그러한 반사를 사용하여, 모바일은 반사기에서의 AOA 및 그로부터의 거리를 결정할 수 있다. 이러한 정보를 사용하여, 모바일은, 인접 방 내에 그리고 위 및 아래 층에 거처하는 반사기를 포함하는, 확장된 부근에서의 각각의 반사기에 대해 이러한 거리 및 AOA에 기반하여 가능한 모바일 위치를 계산한다. 이전 및 최근 위치 고정으로부터 그 위치에 대한 근사적 아이디어를 가지거나 또는 실내 위치결정에 현재 채용된 다른 부정확한 방법 중 어느 것을 사용함으로써, 모바일은 잘못된 위치 전부를 신속히 높은 확률로 배제할 수 있고 그리하여 옳은 위치를 가려내고 그것이 검출되는데 그 순간 사용한 올바른 반사기를 결정할 수 있다. 이러한 실시형태의 개량은 그저 몇몇 예를 들자면 창문 바깥에 또는 바닥 아래에 또는 벽 내부에 있는 것과 같은 물리적으로 불가능한 위치에 기반하는 잘못된 위치를 버리는 것을 수반한다. 계산된 거리에 부가하여, 여기에서 설명된 시스템의 실시형태가 또한 반사기에서의 AOA를 결정한다는 사실은 거짓 위치를 검출하고 그리고 올바르게 식별된 반사기와 연관된 올바른 위치를 식별할 공산을 크게 개선함을 주목한다. 이러한 정보는 도움을 주는 정보로서 후속 고정에 사용될 수 있다. 칼만 필터링 기술은 더욱 결정된 위치가 잡음 있는 측정에 더 강건하게 하는데 사용될 수 있다.
반사가 어느 반사기로부터 유래하는지 결정하기 위한 다른 실시형태는 레이더 신호 반사 전력을 사용하는 것을 수반한다. 반사기의 재귀-지향성 본성, 매립된 지연 정량화를 위한 위에서 개괄된 부분 전력 반사의 방법, 및 시선 조건이 정확한 위치를 위해 보급되어 있다고 예상된다는 사실을 고려하면, 반사가 소정 반사기로부터 유래하였다면 각각의 그 소정 반사기로부터 되돌아 왔을 예상된 전력 레벨을 소정 정확도로 계산하는 것이 가능하게 된다. 이것은 반사가 시선인지 아니면 벽, 천장 또는 바닥을 통해 오고 있는지의 부가적 표시를 준다. 그것은 또한 반사가 반사기와 모바일 디바이스 사이에서 다른 물체에서 튕기는지도 표시할 수 있다. 이러한 정보 전부는 검출된 반사를 각각의 반사기에 올바르게 배정하여 모바일 위치를 올바르게 결정하는데 도움을 준다. 그것은 또한 마지막 위치가 계산된 신뢰도를 결정한다. 더욱, 우리는 내장 반사기 지연의 정확한 측정이 가능하도록 사용된 각각의 반사기의 부분 반사 계수에 의해 각각의 반사기가 다른 것들과 다르게 함으로써 동일한 부근에서의 반사기들을 구별하려고 시도할 수 있다. 후속 반사들 간 전력 차이를 측정함으로써, 우리는 각각의 반사 신호에 대해 이러한 계수의 추정치를 결정할 수 있고 그리고 그 후 우리는 공중 테이블에서의 정보를 사용하여 특정 반사기와 그것을 연관시킬 수 있다.
대체 실시형태에서, 우리는 부근에서의 반사기들이 상이한 주파수 대 주된 로브 스윕 각도 특성을 갖도록 설계할 수 있다. 예컨대, 일 실시형태에서, 하나의 반사기는 일 MHz의 주파수 스윕당  의 주된 로브 스윕을 가질 수 있는 한편 다른 것은 MHz의 주파수 스윕당
의 주된 로브 스윕을 가질 수 있는 한편 다른 것은 MHz의 주파수 스윕당  의 스윕을 가질 수 있다. 모바일이 소정 반사에 대한 최대 반사 주파수를 검출하고 나면, 그 후 그것은 이러한 주파수를 스윕하고 그리고 반사 전력이 얼마나 빨리 줄어드는지 모니터링한다. 모바일이 소정 반사에 대해 반사기까지의 거리를 이미 알고 있기 때문에, 모바일은 여기 주파수가 최적 주파수에서 이동함에 따라 반사 전력이 얼마나 빨리 줄어들어야 하는지 예측할 수 있다. 반사의 각각에 대해 이러한 결과를 비교하는 것, 및 발행된 설치 데이터로부터 부근에서의 반사기에 대한 스윕 특성을 알고 있는 것에 의해, 모바일은 각각의 반사 신호를 올바른 대응하는 반사기에 올바르게 배정할 수 있고 그리하여 모바일 디바이스 물리적 위치는 정확하게 결정될 수 있다. 반사기가 상이한 주파수 스윕 특성을 갖는다는 이러한 아이디어는 각각의 반사기가 소정 대역 내에서의 다른 주파수 부-대역에 응답하게 하는 것과 같은 다른 주파수 특성으로 확장될 수 있다. 일 실시형태에서, 제1 반사기는
의 스윕을 가질 수 있다. 모바일이 소정 반사에 대한 최대 반사 주파수를 검출하고 나면, 그 후 그것은 이러한 주파수를 스윕하고 그리고 반사 전력이 얼마나 빨리 줄어드는지 모니터링한다. 모바일이 소정 반사에 대해 반사기까지의 거리를 이미 알고 있기 때문에, 모바일은 여기 주파수가 최적 주파수에서 이동함에 따라 반사 전력이 얼마나 빨리 줄어들어야 하는지 예측할 수 있다. 반사의 각각에 대해 이러한 결과를 비교하는 것, 및 발행된 설치 데이터로부터 부근에서의 반사기에 대한 스윕 특성을 알고 있는 것에 의해, 모바일은 각각의 반사 신호를 올바른 대응하는 반사기에 올바르게 배정할 수 있고 그리하여 모바일 디바이스 물리적 위치는 정확하게 결정될 수 있다. 반사기가 상이한 주파수 스윕 특성을 갖는다는 이러한 아이디어는 각각의 반사기가 소정 대역 내에서의 다른 주파수 부-대역에 응답하게 하는 것과 같은 다른 주파수 특성으로 확장될 수 있다. 일 실시형태에서, 제1 반사기는  내지
내지  의 주파수 스팬을 사용하여 전체 공간을 가로질러 주된 로브의 방향의 완전 스윕을 행한다. 다른 반사기는 동일한 것을 하는데
의 주파수 스팬을 사용하여 전체 공간을 가로질러 주된 로브의 방향의 완전 스윕을 행한다. 다른 반사기는 동일한 것을 하는데  내지
내지  를 사용한다. 이것은 어느 반사가 어느 반사기에 속하는지의 명료한 결정을 가능하게 한다.
를 사용한다. 이것은 어느 반사가 어느 반사기에 속하는지의 명료한 결정을 가능하게 한다.
공중 발행된 반사기 테이블에서의 어느 반사기로부터 소정 반사가 유래하고 있는지 결정하려고 추구하는 위 실시형태 중 전부는 모바일이 하나의 그리고 단 하나의 반사기로부터 반사를 수신한다고 가정하였다. 그렇지만, 모바일이 2개 이상의 반사기로부터 반사를 수신할 수 있으면, 어느 반사가 어느 반사기로부터 유래했는지 결정하는 것은 더 간단해진다. 대부분의 경우에 우리가 반사 대 반사기의 할당을 잘못 바꾸면, 새로운 컴퓨팅된 위치는 수렴에 대한 반사기에서의 AOA에 대해 측정된 것과는 매우 다른 최대 반사 주파수가 불가피하여 오차를 검출할 것이다. 그때 우리는 올바른 반사기-반사 배정으로 올바른 위치를 선택한다. 일부 경우에, 구체적으로는 모바일이 반사기들로부터 등거리에 그리고 동시에 그것들로부터 떨어져 있는 경우에, 올바른 반사-반사기 배정에서 추측하는 것은 더 난제가 된다. 다행히도, 그러한 배정 하에서, 올바른 및 틀린 반사기-반사 배정을 갖는, 컴퓨팅된 위치 양자는 서로 가깝고 그리고 가능한 잘못된 배정에 기인하는 위치 오차는 작다. 그럼에도 불구하고, 그러한 상황 하에서, 그리고 2개의 반사기로부터 멀리, 다른 반사기가 인근에 있을 것이고 더 정확한 위치를 주고 오차를 분해할 것이라고 예상된다. 우리는 반사기 위치결정에 유의함으로써 그러한 불량한 기하구조의 발생을 감축할 수 있다. 또한, 우리는 불량한 기하구조 발생을 더 감축하기 위해 수평 스윕 반사기를 수직 스윕 반사기와 혼합할 수 있다.
일 실시형태에서, 시스템은 반사를 그들 각각의 반사기에 올바르게 배정하고 그리하여 모바일의 위치의 올바른 계산을 초래하도록 위에서 개괄된 기술 및 방법 중 일부 또는 전부를 사용한다.
여기에서 개시된 시스템은 이용가능한 면허 또는 무면허 대역을 포함하는 여러 RF 대역에서 동작할 수 있다. 주파수가 더 높을수록, 안테나 구조는 동일한 지향성 및 안테나 구조 이득 응답을 달성하기 위해 물리적으로 더 작을 필요가 있다. 또한, 더 높은 대역은 위치의 더 높은 공간적 분해능을 제공한다. 다른 한편, 더 높은 주파수는 모바일 디바이스에서 더 높은 전력 소비 및 더 고가의 Tx 및 Rx 전자부품을 초래한다. 반송파 위상 레인징 기술과 결합될 때 더 높은 주파수는 아래에서 논의되는 바와 같이 사용된 대역폭에 의해 그리고 이용가능한 신호-대-잡음 비에 의해서만 제한된 매우 정확한 위치 결정에 이른다.
소정 순간에 애플리케이션 요건에 의해 필요에 따라 동적으로 달라지는 정도의 정확도로 반사기까지의 모바일 거리의 양호한 추정치에 도달하기 위해 전술한 반사기와 함께 모바일에 의해 사용될 수 있는 레이더 신호의 구조가 이제 설명된다. 레인징 애플리케이션 내 정확도에 대한 이론적 한계는 크라머-라오 하한(Cramer-Rao lower bound; CRLB)에 의해 주어진다(예컨대, "Fundamentals of Radar Signal Processing", Mark A. Richards, 2014년 및 "RF Ranging for Location Awareness", UC Berkeley 기술 보고서, Lanzisera 및 Pister, 2009년 참조).
레인징 애플리케이션에 대해 CRLB는 다음 공식에 의해 주어진다

여기서  는 레인지 측정 분산이고,
는 레인지 측정 분산이고,  는 광속이고,
는 광속이고,  는 신호 대역폭이고, 그리고
는 신호 대역폭이고, 그리고  는 수신기에서의 신호-대-잡음(SNR) 비의 측정이다.
는 수신기에서의 신호-대-잡음(SNR) 비의 측정이다.
식(1)은 다음으로 단순화된다
이것은 실내 레인징에서 사용될 것으로 예상된 전형적 신호-대-잡음 비에 대해서이다.
우리는, 공식으로부터, 신호 대역폭(BW)을 증가시키든지 또는 우리의 신호에 대한 신호 SNR을 증가시키든지 또는 양자에 의해,  를 감축하고 그리하여 레인지 정확도 및 분해능을 증가시킬 수 있음을 알 수 있다. RF 신호에 대해, 대역폭을 증가시키는 것은 여러 방식으로 행해질 수 있다. 그것들 전부 RF 신호가 여러 다른 방식으로 변조될 것을 필요로 한다. 초기 연속파 레이더(CW)는 레이더 신호에 대해 단일 주파수 톤을 사용하였다. 전형적으로 그 톤은 최대 레인지를 증가시키도록 온 및 오프 스위칭되었다. 부가적으로, 파가 온이었을 때 시간은 BW를 증가시키고 그리하여 레인지 분해능을 증가시키도록 가능한 짧게 이루어졌다. BW를 증가시키는 비효율적 방식은 송신 전력 증폭기에서 매우 높은 피크-대-평균 비를 초래하고 그리고 또한 동일한 부근 내 다수의 사용자를 용이하게 감안하지 않는다.
를 감축하고 그리하여 레인지 정확도 및 분해능을 증가시킬 수 있음을 알 수 있다. RF 신호에 대해, 대역폭을 증가시키는 것은 여러 방식으로 행해질 수 있다. 그것들 전부 RF 신호가 여러 다른 방식으로 변조될 것을 필요로 한다. 초기 연속파 레이더(CW)는 레이더 신호에 대해 단일 주파수 톤을 사용하였다. 전형적으로 그 톤은 최대 레인지를 증가시키도록 온 및 오프 스위칭되었다. 부가적으로, 파가 온이었을 때 시간은 BW를 증가시키고 그리하여 레인지 분해능을 증가시키도록 가능한 짧게 이루어졌다. BW를 증가시키는 비효율적 방식은 송신 전력 증폭기에서 매우 높은 피크-대-평균 비를 초래하고 그리고 또한 동일한 부근 내 다수의 사용자를 용이하게 감안하지 않는다.
일 실시형태에서, 모바일은 신호 BW을 증가시키도록, 펄스 윈도잉 있는 또는 없는, 주파수 변조, 선형 및 비-선형 양자의 스윕 방법을 사용한다. 동일한 SNR을 고려하면, 주파수 변조는 시간에서 1/BW 그리고 거리에서 2c/BW만큼 레인지 분해능을 증가시킬 수 있다. 선형 주파수 변조(LFM)는 일부 레이더 시스템에서 사용된 기술이다. 여기에서 개시된 반사기에 대해, 주파수를 변화시키는 것은 반사기에서의 지향성의 각도를 변화시키는 것임을 주목하라. 이러한 이유로, 주파수 스윕 범위(BW)는 이러한 실시형태에서는 반사기의 지향성이 거의 변하지 않는 BW로 한정된다. 그리하여, 이러한 실시형태에서, 신호의 중심 주파수를 변화시키는 것은 다른 반사기 지향성 각도를 초래한다. 그러나, LFM의 경우에서와 같이 더 작은 BW만큼 중심 주파수 주위 주파수를 변화시키는 것은 경미한 지향성 변화를 초래하여 LFM 스윕 동안 재귀-지향성이 보존됨을 보증한다. LFM 주파수 변조는 일 실시형태에서 사용된다. 그러나, LFM 대신에 비-선형 주파수 변조, 윈도잉된 주파수 변조, 게이팅된 LFM, 업 스윕 및 다운 스윕 LFM은 물론 스텝핑된 처프 파형(예컨대, "Fundamentals of Radar Signal Processing" 참조)을 포함하는 많은 다른 주파수 변조도 사용될 수 있다.
일 실시형태에서, 주파수 변조를 사용하는 공동-위치하는 모바일 디바이스는 그들 레이더 신호를 인근 다른 모바일 디바이스와 구별하도록 반사기에 의해 좌우되는 바와 같은 다른 중심 주파수, 상이한 게이팅 온/오프 시간, 및 다른 스윕 레이트를 선택할 수 있다.
일 실시형태에서는, 위상 변조된 신호가 사용된다. 예시적 위상 변조는 BPSK 또는 QPSK 유형을 포함한다. 반송파는 신호 대역폭(BW)을 증가시키도록 직접 시퀀스 확산 스펙트럼(DSSS)을 사용하여 변조된다. 이러한 실시형태에서 DSSS는 2개의 목적을 제공한다. 그것은 BW를 증가시키고 그리하여 CRLB에 따라 레인지 측정 정확도를 개선한다. 그것은 또한 다중-액세스 능력을 제공한다. 다중-액세스는 쇼핑 센터 및 스포츠 이벤트에서의 경우와 같은 동일한 부근 내 수많은 모바일 디바이스를 지원할 수 있는 능력을 지칭한다. 이러한 다중 액세스는 여러 다른 위성 신호 간을 구별하도록 GPS에서 현재 채용되는 바와 같이 여러 다른 의사 난수 시퀀스(PRN)를 사용함으로써, 또는 동일한 주파수 상에서 여러 다른 모바일 및 셀 사이트를 분리하도록 CDMA 통신 시스템에서 오늘날 사용되는 바와 같이, 동일한 PRN을 사용하지만 어느 예상된 반사 지연보다도 더 큰 PRN 오프셋만큼 사용자를 분리함으로써 달성될 수 있다(예컨대, "CDMA RF Systems Engineering", Samuel C. Yang, 1998년 참조).
일 실시형태에서, 의사 난수(PRN) 시퀀스를 사용하는 대신에, 모바일은 참 난수(TRN) 시퀀스를 사용한다. PRN 시퀀스는 그것들이 실제로는 랜덤이 아니고 참 난수 시퀀스를 가능한 많이 흉내내는 시퀀스를 산출하도록 설계된 수학적 관계에 따라 발생되기 때문에 소위 의사 랜덤이다.
참 랜덤인 TRN은 정의에 의해 무한 사이클 길이를 갖는다. 그것들은, 증폭된 열 잡음, 또는 다이오드 역방향 바이어싱된 사태 잡음과 같은, 자연적으로 일어나는 랜덤 현상을 디지털화함으로써 모바일 내에서 온 더 플라이 발생될 수 있다. 그러한 TRN은 이론적으로는 다른 TRN과 영 상호 상관을 가지고 그리하여 그것들을 사용하여 코딩된 신호는 실제로 모든 다른 리스너에게 또는 하나 이상의 칩 주기만큼 시간에서 시프트된 자신의 어느 사본에라도 더 높은 열 잡음처럼 보인다. 반사기의 수동 및 선형 본성을 고려하면 동일한 디바이스에서 Tx 프로세싱 및 Rx 프로세싱 양자가 수행되므로 TRN을 사용하는 것이 가능하다. Tx 및 Rx가 동일한 디바이스 상에서 일어나면, TX 신호를 발생시키는데 사용된 참 난수 시퀀스 값의 일시적 사본을 이들 값이 Rx에서의 반사를 상관 또는 디-스프레딩하는데 사용될 때까지 유지함으로써 TRN 사용이 행해진다. 레인징 신호의 발신자가 수신자로부터 물리적으로 떨어져 있는 경우 모든 다른 이전에 제안된 실내 솔루션은 실시간으로 TRN을 사용할 수 없을 것이다. 이것은 적분 시간에 대한 어떠한 한계도 제거하고 그리고 모바일이 그것이 소정 순간에 소망하는 정확도를 그것이 이루는데 필요한 어떤 적분 시간이라도 선택할 수 있게 한다.
Rx 및 Tx 양자가 동일한 모바일 상에 거처하고 동일한 국부 발진기를 사용하기 때문에 모바일 클록이 유효 신호 상관을 위해 외부 소스와 절대 시간으로 동기화될 필요는 없더라도, 그렇지만 모바일 클록은 소망의 레인지 정확도를 내놓도록 광속으로 반사 비행 시간을 타이밍하기에 충분히 정확해야 한다. 환언하면, 모바일 클록이 절대 세계 시간을 유지하는 것이 중요하지는 않지만, 국부 모바일 클록은 Tx로부터 Rx 반사까지의 시간을 정확하게 측정하여야 한다. 클록이 정확한 차분 시간(Rx_시간 - Tx_시간)을 유지함을 보증하는 것은 국부 모바일 클록이 절대 시간을 정확하게 유지함을 보증하는 것보다 훨씬 더 간단한 문제이다. 일 실시형태에서, 모바일은 정확한 참조로부터 유도된다고 알려져 있는 그리고 이러한 소스가 도플러에 기인하여 그 겉보기 주파수를 시프트하지 않도록 이동하고 있지 않는 환경에서 이용가능한 어느 현재의 RF 신호에라도 국부 발진기를 로킹함으로써 정확한 차분 시간을 유지하도록 이루어진다. 실내 환경에 대해, 사용자 이동은 가장 엄격한 애플리케이션을 제외하고는 수락가능한 사용자 이동에 기인하는 도플러를 무시하기에 충분히 느리다. 매우 정확한 주파수 참조를 갖는 외부 정지 참조 소스의 예는 브로드캐스트 라디오 또는 TV 신호 또는 어느 셀룰러 네트워크라도 포함하며, 비동기식 네트워크를 포함한다. 실제로, CDMA 및 LTE와 같은, 모든 현대 셀룰러 모바일 폰은 이미 그것을 행하여 모바일과 셀 사이트 간 적절한 통신을 가능하게 한다. 셀룰러 네트워크 신호에 국부 발진기의 이러한 로킹은 또한 일부 실외 위치 측위 구현에서 더 긴 GPS 신호 상관 시간이 가능하도록 사용되어 왔다. 국부 발진기가 예컨대 셀 사이트 파일럿 신호에 로킹되고 나면, 국부 발진기 주기는 셀 사이트에서 검출된 GPS 콘스텔레이션의 그것과 같게 조절된다. 사실상, 이러한 동작은 비교적 저렴한 국부 발진기가 GPS 시간처럼 정확한 "스톱 워치" 정확도를 유지할 수 있게 하고, 그리하여 매우 높은 정확도 레인지 측정을 달성한다. 발진기 로킹 후에라도, 모바일 디바이스의 절대 시간은 미지의 모바일 대 셀 사이트 전파 지연만큼 절대 시간과 다를 수 있다. 다행히도, 외부 데이터에 따른 절대 시간은 반사기의 수동 본성에 기인하여 필요하지 않다. 이러한 기술은 오늘날의 실내 환경에서 유비쿼터스 셀룰러 커버리지 때문에 실내에서 작동한다. 외부 참조에 발진기를 로킹하는 것은 매우 높은 위치 정확도가 소망될 때 수행될 수 있다. 다른 애플리케이션에서, 수정-기반 국부 참조 발진기는 충분한 정확도를 갖는다.
일 실시형태에서 위상 변조가 사용될 때 소정 반사기 내 내장 지연은 단일 PRN 또는 TRN 칩 주기보다 더 커야 함을 여기에서 주목하는 것이 중요하다. 이것은 실내 환경에서는 전형적 칩핑 레이트에서 단일 칩 주기 동안 주행한 거리가 조우한 측정된 레인지보다 훨씬 더 길 것이라고 예상되기 때문이다. 예컨대, 10MHz 칩핑 레이트에서, 거리에서의 칩 길이는 자유 대기에서 약 30 미터이다. 그것은 모두 단일 코드 칩 내에서 신호가 모바일 TX를 빠져나가고, 반사기로 주행하고 그리고 모바일 Rx로 되돌아 올 고도의 개연성이 있음을 의미한다. 이것은 모바일이 동일한 모바일로부터의 Tx 신호와 그 에코 Rx 신호 간을 구별하기 위해 반사기 내장 지연이 하나의 칩보다 더 클 필요가 있음을 의미한다. 더욱, 반사를 부근에서의 다양한 반사로부터 분리하기 위해, 모든 반사기마다 최소 하나의 코드 칩 주기, 예컨대, 10MHz 칩핑 레이트에 대해 100ns만큼 모든 다른 반사기와는 다른 지연을 가져야 한다. 이것은 일 실시형태에서는 단순 BAW 필터로 용이하게 성취될 수 있다. 또한, 반사기가 부분 반사를 채용하는 구현에서, 반사기 지연은 근거리의 반사기로부터의 이차 반사가 더 긴 내장 지연을 갖는 원거리의 반사기의 PRN 지연과 정합하는 것을 방지하기 위해 소정 반사기로부터 다수의 부분 전력 반사가 잦아들 수 있게 하도록 하나의 주기보다 많이 서로 달라야 한다.
여기에서 개시된 시스템은 실내 위치 측위에 대해 비컨 및 의사 위성에 의해 경험된 근거리/원거리 문제에 무감할 수 있다. 이것은 대부분의 시간에 여러 다른 반사기로부터의 반사는 반사기 주파수 각도 스윕 특징에 기인하여 다른 중심 주파수에서 일어나고 그리하여 주파수 베이스에 기반하여 격리될 수 있기 때문이다. 부가적으로, 긴 PRN은 물론 이론상 무한 사이클 TRN도 사용할 수 있는 능력은 그러한 코드에 대한 낮은 상호 상관 값에 기인하여 근거리/원거리의 자신의 반사 신호의 더 양호한 분리가 가능하다. 긴 PRN 또는 TRN은 동일한 국부 발진기가 발진기 위상 잡음의 한계까지 신호를 디스프레딩하는 것 및 스프레딩하는 것 양자에 사용된다는 사실에 의해 실현가능하게 된다. 더욱, 매우 정체된 조건 하에서, 중앙 네트워크 라디오 링크 관리자는 용인할 수 없는 상호 간섭이 일어나지 않음을 보증하도록 모바일들 간을 조정할 수 있다. 이러한 관리자는 인터넷 클라우드에 어딘가에 거처할 수 있다. 이것은 반사기가, 방사 비컨 또는 의사 위성과는 대조적으로, 수동이고 그리하여 부근에서의 모바일로부터 유래하는 신호만을 방사할 뿐이기 때문에 가능하다. 라디오 링크 관리자는 관리가능한 수의 모바일 동시-액세스만이 부근에서의 반사기를 사용할 수 있게 하여 소망의 또는 달성가능한 레벨의 정확도로 모두에 대해 유용한 위치 측위 결정을 보증할 수 있다. 시스템은 모바일이 하나의 근거리의 반사기를 사용하여 그 위치를 결정할 수 있기 때문에 다른 시스템의 근거리/원거리 문제에 매우 무감할 수 있다. 검출된 부가적 원거리의 반사기는 정확도를 개선하지만 유용한 3D 위치 결정에 필요하지는 않다. 그래서, 있을 것 같지는 않지만 모바일이 동일한 중심 주파수에서의 2개의 반사기로부터의 반사를 수신하며 하나의 반사가 다른 것보다 훨씬 더 높은 전력을 갖는 경우에, 아마 하나의 반사기를 보고 있을 모바일은 여전히 그 위치를 유용하게 계산할 수 있고 그리고, 단시간에, 작은 이동은 안테나 스윕 중심 주파수를 변화시켜 모바일이 다른 반사기를 검출하고 그리하여 이전 위치 결정을 정제할 수 있게 한다.
일 실시형태에서, 다른 반사기를 마스킹하는 근거리의 반사기에 대한 매우 강력한 반사를 수신하는 모바일은 모바일의 방향으로 최대 반사를 초래하는 최적으로부터 송신 주파수를 디튜닝함으로써 이러한 근거리의 반사기로부터의 반사 전력을 감축할 수 있다. 이것은 근거리의 반사기로부터의 반사 전력을 심하게 저하시켜 모바일이 훨씬 더 낮은 반사 전력을 갖는 원거리의 반사기로부터의 신호를 검출할 수 있게 할 수 있다. 모바일은 또한 근거리/원거리 현상에 기인하는 필요한 Rx 동적 레인지를 감축하도록 다른 반사기를 여기시키는 각각의 중심 주파수에 대한 별개의 전력 제어를 수행할 수 있다.
사택 내에서와 같이, 단일 사용자 또는 낮은 수의 띄엄띄엄 위치 결정 사용자를 갖는다고 예상되는 장소에서, 레이더 신호의 위상 변조에 대한 일차적 목적은 오로지 모바일과 반사기 간 더 미세한 레인지 분해능을 초래하도록 신호 대역폭(BW)을 증가시키는 것이다. 그러한 시나리오 하에서, 그리고 일 실시형태에서, 모바일은 베이커 코드 또는 시프트된 베이커 코드의 적 또는 어느 수의 다른 코드와 같은 비교적 짧은 PRN 코드를 채용할 수 있다(예컨대, "Fundamentals of Radar Signal Processing" 4.10절 참조). 여기에서 소망의 BW 증가는 PRN 시퀀스 길이가 아니라 칩 레이트의 결과이다. 그리하여, 이들 시퀀스가 짧더라도, 여전히 BW 증가를, 그리하여, 대략 1/BW의 칩핑 레이트만큼, 레인지 분해능 개선을 이룰 수 있다. 낮은 수의 사용자를 고려하면, 정확도를 증가시키기 위한 SNR 개선은 인접 사용자의 확률이 낮으므로 출력 전력을 증가시킴으로써 행해질 수 있다. 그래도, 이들 띄엄띄엄한 환경에 대해서도, SNR을 개선하는데 더 긴 코드가 여전히 사용될 수 있다.
일 실시형태에서, 수많은 모바일 디바이스가 서로 가까운 근처 내에서 그들 위치를 결정하려고 시도할 것으로 예상되는 장소에서는, 더 긴 PRN 시퀀스 또는 심지어 TRN 시퀀스가 사용된다. 더 긴 시퀀스로 2개의 시스템 아키텍처는 자신들을 제시한다. 제1 아키텍처는 동시 TX 및 RX가 동일한 모바일 내에서 일어나는 것이 가능하지 않다(하프 듀플렉스). 제2의 것은 동시에 동시 TX 및 Rx가 가능하다(풀 듀플렉스). 레이더 시스템에서는 전통적으로 하프 듀플렉스가 유리하였다. 이것은 레이더 시스템에서는 수신 신호가 송신 신호의 지연된 사본이기 때문이다. 그리하여, 단순 대역 분리를 사용하는 Tx와 Rx 간 전형적 채널 분리는 실용적이지 않을 수 있다. 그래서, 지금까지의 대다수의 레이더 시스템에 대해, Tx와 Rx 활동은 시간 인터리빙되어 Rx는 Rx 경로로 되돌아 누설되는 Tx 신호에 의해 압도되게 되지 않는다.
일 실시형태에서, 모바일 디바이스는 송신 레이더 신호의 위상을 변조하는데 긴 PRN 또는 TRN을 사용하고 Tx와 Rx 활동을 시간 인터리빙한다. PRN 시퀀스의 이점을 충분히 얻기 위해서는 적어도 하나의 완전 PRN 시퀀스 길이를 발신하여야 한다. 그 시간 동안 Rx측은 마스킹 오프 된다. Tx와 Rx가 중첩하지 않기 위해, 2개의 대안 중 어느 하나가 채용된다. 제1의 것은 반사기에 채용된 내장 지연이 하나의 완전 길이의 PRN 시퀀스에 부응하기에 충분히 길게 되는 것이다. 환언하면, 완전 길이의 PRN이 송신되는 동안 반사는 되돌려 발신되지 않고, 그 후에 Tx는 오프로 되고 그리고 Rx는 반사를 수신하기 직전에 가능으로 된다. 다른 대안은 단일 PRN 시퀀스 길이 내에서 Tx와 Rx 활동을 시간 인터리빙하는 것이다. 예컨대, Tx가 온으로 되고 PRN 시퀀스 길이의 일부를 송신하고 그 후 Tx를 오프로 하고 Rx를 가능으로 하여 반사의 에코를 경청한다. 예상된 반사의 기간 후에, Tx는 온으로 되어 PRN 시퀀스의 다른 일부를 송신하는 한편 Rx는 불능으로 되고 등이다. 이러한 인터리빙은 PRN 총 시퀀스 길이가 송신될 때까지 계속된다. 이러한 인터리빙은 내장 반사기 지연이 크지 않게 하는 결과를 갖지만 동시에 긴 PRN 시퀀스의 이점을 보존한다. 양 대안에서, 제1 칩을 발신하는 것과 시퀀스에서의 마지막 칩을 수신하는 것 간 기간은 이론적으로는 동일하다. 그렇지만, 부분 인터리빙의 경우에는, Tx와 Rx 스위칭 간 소정 가드 타임이 반사기의 가변 지연에 부가하여 고려되어야 한다.
다른 실시형태에서, Tx와 Rx 양자는 동시에 일어난다(풀 듀플렉스). 레이더 시스템에서, Rx 경로를 스플래싱하는 Tx 신호는 그것이 동일한 모바일 내에서 구축되므로 큰 정확도로 알려져 있다. 그러한 시나리오 하에서, 능동 잡음 소거 기술은 결합된 그리고 바람직하지 않은 Tx 스플래싱을 감산해 내도록 Rx 신호 경로 상에서 사용될 수 있다. 예컨대, 서큘레이터(circulator), 교차 안테나 편파 및 능동 잡음 소거가 사용될 수 있다. 이것은 유용한 실내 위치 측위에 충분한 동적 레인지를 준다. 모든 반사기가 최소 하나의 코드 칩 지연을 갖는다는 사실은 환경으로부터의 가까운 반사가 디스프레딩 Rx 동작에 의해 감쇠될 수 있음을 의미한다. 또한, 긴 PRN 또는 TRN 코드의 사용은 이러한 격리 요건을 개선하도록 더 높은 프로세싱 이득이 가능하고 그리고 더욱 모바일과 반사기 간 느린 상대 운동에 기인하여 무시할 수 있는 상대적 도플러 시프트에 기인하는 무시할 수 있는 상호 상관에 의해 가능하게 된다. 반사기의 재귀-지향성 속성에 기인하여, 레이더 반사는 전형적 레이더 애플리케이션에서보다 훨씬 더 강력하고 그리하여 더 낮은 동적 레인지가 요구되어 더 적은 필요한 Tx/Rx 격리를 초래함을 주목한다.
BW을 증가시키기 위해서도 그리고/또는 다양한 다중-액세스 동작을 가능하게 하기 위해서도 신호를 변조하는 다양한 실시형태에 부가하여, 우리는 또한 CRLB 식에서 서술된 바와 같이 SNR 비를 증가시킴으로써 레인지 분해능을 개선할 수 있다. SNR을 증가시키는 것은 2개의 방식으로 행해진다. 일 실시형태에서, SNR은 모바일로부터의 레이더 신호에 대한 평균 송신 전력을 증가시킴으로써 증가된다. 이것은 배터리 전력 소비가 엄청나게 될 때 소정 대역에 대해 모바일 디바이스로부터의 최대 방사 전력에 대한 FCC 한계에 도달될 때까지 행해질 수 있다. 다른 실시형태에서, Rx 상관 시간이 증가되고 그리하여 Rx의 프로세싱 이득을 증가시키고 등가 SNR을 개선한다. 증가된 상관 시간은 주파수 및 주기 정확도를 위해 Tx와 Rx 마스터 클록 간 타이트 동기화를 필요로 한다. 다행히도, 여기에서 개시된 시스템은 수동 반사기를 사용하고 그리하여 Tx 및 Rx 신호 양자는 동일한 모바일 내에서 동일한 클록을 사용한다. 그러한 상황 하에서, 상관 시간은 전형적으로 마이크로초 차수의, 반사기 내장 지연을 포함하는, 반사 왕복 지연에 걸리는 시간 동안 국부 클록이 얼마나 많이 드리프트하는지에 의해서만 제한될 뿐이고, 그리하여 상관 시간은 저렴한 발진기에 대해서도 무한일 수 있다. 코히어런트 상관 시간이 더 길수록, 프로세싱 이득이 더 높고 그리하여 달성된 SNR이 더 높다. 이것의 일례는 수신 신호가 전형적으로 열 잡음 바닥 대비 -25dB이지만 수신기가 긴 상관 시간을 사용하는 프로세싱 이득에 기인하여 신호를 검출 및 프로세싱할 수 있는 GPS에서 일어나는 것이다.
GPS에서, 방출된 DSSS 위상 변조된 반송파는 필터링되지 않고 그리하여 스펙트럼은 반송파 주파수의 좌측으로 그리고 우측으로 무한히 뻗는 SINC 함수에 근사한다. GPS는 해수면에서의 수신 신호 전력이 자연 열 잡음 레벨의 약 25dB 아래이므로 이것을 행할 수 있다. 지상 통신에 대해, 전력 레벨은 더 높고 그리고 대역 외 방출은 필터링되어야 한다. 그래서, 전형적 지상 DSSS 송신은 송신 BW 내에서 평탄한 스펙트럼 전력 레벨을 그리고 그 BW 바깥에서 매우 낮은 방출을 갖는다. 반사기의 주파수 스윕 본성을 고려하면 우리는 반사 신호가 송신 BW 내에서 평탄하지 않은 스펙트럼을 갖는다고 예상할 것이다. 이것은 주파수가 모바일의 방향으로 최대 반사를 주는 주파수로부터 멀어지게 됨에 따라 반사기의 이득이 떨어지기 때문이다. 모바일이 송신 신호의 중심 주파수가 모바일의 방향으로의 최대 반사에 필요한 바로 그 주파수인 DSSS를 송신하고 있다고 가정하면, 그때는 반사 신호의 스펙트럼이 평탄하지 않을 것이지만 우리가 중심으로부터 어느 일측으로 멀어지게 됨에 따라 동등하게 전력이 떨어질 것이라고 예상할 것이다. 송신 신호가 모바일의 방향으로의 최적 반사에 필요한 주파수보다 조금 더 높거나 낮은 중심 주파수를 가지면, 그때 그 피크 전력은 BW의 중심으로부터 일측 또는 타측으로 오프셋될 것이다. 이것은 그것이 그 중심 주파수를 조절하여야 한다는, 그리고, 모바일의 방향으로 소정 반사기에 대한 최대 반사에 필요한 주파수 및 그리하여 조절된 중심 주파수 주위의 대칭적 반사 스펙트럼 전력을 추적하기 위해, 어느 방향으로인지의 표시를 모바일에 제공한다. 그것은 또한 주파수를 연속적으로 스윕할 필요 없이 AOA에 대한 표시를 제공한다.
일 실시형태에서, 모바일은 다양한 레벨의 정확도를 달성하도록 그것이 이용하는 수고를 증가 또는 감소시키기에 충분히 융통성 있다. 우리가 앞서 서술한 바와 같이, 증가된 정확도는 신호 BW, 송신 전력 레벨 및 코히어런트 Rx 상관 시간 중 어느 것 또는 전부를 증가시키는 것을 요구한다. 증가된 BW는 신호의 일부가 모바일의 방향으로 더 낮은 반사기 안테나 이득을 경험하며 신호의 일부가 모바일로부터 떨어져 반사되고 그리하여 부근에서의 다른 모바일에 대한 간섭을 증가시키는 결과를 초래한다. 송신 전력을 증가시키는 것은 배터리 수명을 감축하고 그리고 또한 다른 것들에 대한 간섭을 증가시킨다. 마지막으로, 상관 시간을 증가시키는 것은 또한 배터리 수명을 감소시키고 그리고 더 긴 송신 신호 듀레이션(duration)에 기인하여 다른 것들에 대한 배경 잡음을 증가시키고 더 긴 고정할 시간 기간을 요구한다. 그래서, 모바일이 높은 정확도가 필요하지 않을 때마다 그것이 들이는 수고를 줄이는 것이 유용하게 된다. 일 실시형태에서, 모바일은 그때 필요한 레인지 정확도를 달성하기 위해 능동 송신 전력 제어 및 동적 BW 선택 및 상관 시간 선택을 수행한다.
일 실시형태에서, 모바일은 상대적 이동 위치 업데이트를 위해 반송파 위상 측정을 이용한다. 지금까지 우리는 코드 위상 방법에 기반하는 위치 결정만을 고려하였을 뿐이다. 이것은 위에서 개괄된 바와 같이 미세도가 BW 및 SNR에 종속하는 PRN 칩 길이의 몇 분의 일로 위치 정확도를 제한한다. 그렇지만, 반송파 위상 방법은 반송파 중심 주파수 파장의 몇 분의 일 내까지 위치 정확도를 달성할 수 있다. 이것은 코드 위상 기술보다 더 미세한 분해능 크기 차수이다. 어느 코히어런트 수신기에서라도, 반송파 위상은 알려져 있지만 신호가 반사기로 그리고 그로부터 주행한 파장의 정수 수는 알려져 있지 않다. 이것은 소위 반송파 정수 모호성(N)이다. 우리가 N을 알고 있고 그리고 우리가 또한 Tx와 Rx에서 반송파의 잔차 위상을 알고 있으면, 우리는 반송파 파장 절대 정확도의 작은 몇 분의 일까지 레인지를 계산할 수 있다. 유리한 조건 하에서, 사용자 BW 및 이용가능한 SNR은 코드 위상 결정된 레인지의 분산을 ½ 반송파 파장 아래까지 좁히기에 충분하다. 이론적으로, 이것은 반송파 위상 계산을 위해 N을 결정하고 매우 정확한 위치결정을 가능하게 하기에 충분하다. 사실상, 신뢰할 만한 N 결정을 위해 ¼ 반송파 파장 미만 아래까지 코드 위상 위치 분산을 얻을 필요가 있다. 하나 이상의 반사기에 대해 N이 결정되고 나면, 우리는 N을 결정하는데 들인 수고를 완화하고 그리고 수신 신호의 반송파 위상을 연속적으로 추적하고 어느 방향으로든 완전 위상 랩 어라운드마다 N을 증분 또는 감분함으로써 각각의 반사기에 대한 N의 정확한 지식을 유지할 수 있다. 환언하면, 모바일은 N을 결정하도록 가능하게는 더 높은 Tx 전력 또는 더 긴 Rx 상관 시간에 의해 SNR을 증가시키고 그리고 또는 칩핑 레이트를 증가시킴으로써 BW를 증가시키는데 큰 수고를 들이고, 그 후 매우 정확한 위치결정을 유지하고 있도록 연속적 반송파 위상 추적으로 스위칭하고 그것이 N을 결정하는데 필요로 한 BW 및 또는 SNR을 감축함으로써 완화한다. 어느 때라도 반송파 추적이 환경 조건에 기인하여 상실되면, 모바일은 재차 위치 결정 및 N 결정을 위해 코드 위상 방법에 더 심하게 의존하도록 복귀한다.
반송파 위상 레인징 기술을 사용하는 실시형태에서, 모바일은 주파수 스윕된 반사기의 주된 이득 로브가 여기 주파수의 함수로서 스윙할 때 초래되는 반송파 위상 시프트를 보상한다. 이러한 효과를 보상함이 없으면, 반송파 위상 레인징 기술의 충분한 이점은 실현되지 않을 수 있다. 다행히도, 모바일은 여기 주파수를 알고 있고 주된 로브의 각도의 발행된 반사기 데이터로부터 알고 있고 그리하여 주파수 스윕된 페이징된 어레이의 전형적인 이러한 위상 시프트를 추정 및 보상할 수 있다.
허용가능한 BW 및 또는 SNR을 고려해 볼 때 환경이 코드 위상 방법으로부터 N의 신뢰할 만한 결정이 가능하지 않은 경우에, 우리는 매우 정확한 상대 운동 측정을 가능하게 하는 이전 위치로부터의 잔차 반송파 위상 변화, 및 완전 주기 위상 변화를 통해, 상대적 N 증분/감분을 추적함으로써 모바일의 상대적 이동을 추적할 수 있다. 정지 반사기와 정지 모바일에 대해, 이러한 방법은 인정하건대 절대 위치를 결정하기 위한 부가적 정보를 내놓지 않는다. 그렇지만, 모바일이 이동하고 있고 다수의 반사기로부터 반사를 수신하고 있으면, 소정 시간 후에, 추적 이력을 유지하면서, 특히 모바일과 반사기들 간 기하구조가 눈에 띄게 변화하면 이러한 반송파 위상 N 모호성을 결정하고 높은 정확도 절대 추적 모드로 이행하는 것이 가능하게 되는데 의사 위성 및 GPS 위성 신호를 사용하는 무결성 비컨 랜딩 시스템에 의해 사용되는 바와 같다(예컨대, "Global Positioning System: Theory and Applications Volume II", Parkinson 및 Spilker, 1996년, 제15장 및 "GPS Pseudolites: Theory, Design and Applications", H. Steward Cobb, 박사 논문, Stanford University, 1997년에 설명된 바를 참조). 이러한 방법은 3개 이상의 반사기가 모바일에 보이면 작동한다.
앞선 실시형태에서, 모바일은 정확한 위치결정을 유지하고 있도록 반송파 위상을 추적한다. 이것은 혼잡한 환경에서 다중 액세스 제한에 기인하여 가능하지 않을 수 있다. 그러한 경우에 대해, 시스템은 N을 매우 신속히 분해할 수 있는 기술을 채용한다. N이 최소 시간으로 분해될 수 있기 때문에, N을 한 번 결정하고 그것을 따르는 반송파 추적을 유지하는 것보다는 모든 고정마다 N을 결정하는 것이 오히려 효율적이므로 추적은 필요하지 않다. 더 높은 칩핑 레이트 및 다중 주파수는 스포츠 스타디움과 같은 혼잡한 환경에서도 반송파 위상 레인지 정확도를 가능하게 하도록 최소 시간 및 이동으로 신속히 N을 결정하는데 사용될 수 있다.
일 실시형태에서, 다중 주파수는 N을 온 더 플라이 분해하고 반송파 위상 레인징을 가능하게 하기에 충분한 정보를 산출하도록 더 높은 칩핑 레이트와 함께 사용된다. 이러한 분야와 생소한 것들은, 예컨대, Stone, Jonathan 등, "Carrier Phase Integer Ambiguity Resolution Using Dual Frequency Pseudolites", 제11회 International Tech, Meeting of the Satellite Division of ION, 1998년 9월, 961-968 페이지 및 Forssen, B. "Comparison of wide-laning and tone-ranging", Electronic Letters, 1997년 8월 28일, 제33권, 제18호, 1525-1526 페이지를 참조할 수 있다. 반사기 기반으로, 여기에서 개시된 시스템은 τ를 보정할 필요가 없고 그래서 위치 계산 프로세스와는 독립적으로 각각의 반사기에 대한 반송파 위상 모호성을 분해할 수 있다. 부가적으로, 일 실시형태에서, 여기 주파수는 때로는 고정된 주파수가 감안할 수 있는 상황 하에서 N의 더 양호한 확률적 결정이 가능하도록 조금 디더링된다.
다중-주파수 반사기는 다른 RF 대역에 응답하는 다수의 병설된 스윕 반사기로 구축된다. 하나의 반사기는  내지
내지 의 스윕에 응답하도록 설계되는 한편, 다른 것은
의 스윕에 응답하도록 설계되는 한편, 다른 것은  내지
내지 의 대역에 응답하도록 제작된다. 이들 반사기가 동일한 평면을 따라 스윕하도록 제작되면, 2개의 부-대역은, 어느 소정 여기 주파수에서라도, 주된 이득의 방향이 반사기마다 다르고 그리하여 2개의 주파수가 어느 반사기 대 모바일 각도에라도 사용됨을 보증하도록 겹치지 않거나 부분적으로 중첩할 수 있을 뿐이다. 이들 병설된 반사기의 안테나 포트는 RF 결합기-분배기에 의해 동일한 지연 소자에 접속되고 그리하여 똑같은 내장 지연을 갖는다. 모바일은 이제 다중 주파수를 사용하여 이러한 다수의 반사기를 여기시킬 수 있고 그리하여 하나의 컴파운드 반사기 및 짧은 측정 시간을 사용하여 반송파 위상 정수 모호성(N)을 분해할 수 있다. 이것은 반송파 위상 레벨 정확도를 여전히 가능하게 하면서 정체된 환경에서 시스템 용량을 증가시키는 것을 초래한다.
의 대역에 응답하도록 제작된다. 이들 반사기가 동일한 평면을 따라 스윕하도록 제작되면, 2개의 부-대역은, 어느 소정 여기 주파수에서라도, 주된 이득의 방향이 반사기마다 다르고 그리하여 2개의 주파수가 어느 반사기 대 모바일 각도에라도 사용됨을 보증하도록 겹치지 않거나 부분적으로 중첩할 수 있을 뿐이다. 이들 병설된 반사기의 안테나 포트는 RF 결합기-분배기에 의해 동일한 지연 소자에 접속되고 그리하여 똑같은 내장 지연을 갖는다. 모바일은 이제 다중 주파수를 사용하여 이러한 다수의 반사기를 여기시킬 수 있고 그리하여 하나의 컴파운드 반사기 및 짧은 측정 시간을 사용하여 반송파 위상 정수 모호성(N)을 분해할 수 있다. 이것은 반송파 위상 레벨 정확도를 여전히 가능하게 하면서 정체된 환경에서 시스템 용량을 증가시키는 것을 초래한다.
일 실시형태에서, 시스템은 주파수 스윕을 사용하여 반송파 정수 모호성을 분해한다. 반사기 중 하나에서 반사되는 송신 레이더 신호는 내장 반사기 지연에 부가하여 왕복 자유 대기 지연과 같은 지연을 경험한다. 이러한 지연은 소정 수의 정수 반송파 사이클 및 잔차 반송파 위상으로 변환된다. Tx 위상을 Rx 위상에 비교함으로써 우리는 이러한 잔차 위상을 결정할 수 있다. 우리가 여기 주파수를 변화시킬 때, 사이클의 정수 수는 물론 잔차 위상도 둘 다 변화된다. 우리가 스윕된 여기 주파수의 함수로서 이러한 변화를 추적하면, 우리는 반사 신호의 사이클의 정수 수를 결정할 수 있을 것이다. 마이크로초 차수의, 반사기의 전형적 내장 지연, 및 GHz 차수의, 전형적 여기 주파수를 고려하면, 왕복 사이클의 예상된 수는 수백 또는 수천 사이클에 있을 것이다. 그것은, Tx에서의 0.1% 주파수 변화에 대해, 완전 사이클 이상이 왕복 경로에 가산되든지 그로부터 감산되는지 한다는 것을 의미한다. 모바일은 매우 정확한 중심 주파수를 발생시킬 수 있다. 완전 사이클 위상 누적을 카운트하는 것을 포함하여, Rx 반송파 위상에서의 변화를 추적하면서 주파수를 스윕함으로써, 우리는 N을 주는 Rx 위상 변화 대 Tx 주기 부분 변화 비를 결정할 수 있다. N을 결정하였고, 이제 우리는, 내장 반사기 지연을 감산한 후에, 높은 정도의 정확도로 레인지를 계산할 수 있다.
모바일은, 각각의 반사기에 의해 제공된 각도에 기인하여, 3D 위치를 결정하는데 하나의 반사기만을 사용할 수 있다. 예컨대, 각각의 반사기는 방위각 및 고도각 양자를 주도록 병설된 수평 스윕 반사기에 부가하여 수직 스윕 반사기를 가질 수 있다. 이들 각도의 정확도는 스윕 감도 및 SNR에 종속한다. 그렇지만, 반송파 위상 기술과 함께, 다수의 반사기가 사용되면, 그러한 시스템의 정확도는 기본적으로는 한정되지 않고 그리고 소정 환경에서 충분한 BW, SNR, 평균화가 이용가능하면 어느 정확도라도 달성될 수 있다.
일 실시형태에서, 공중 액세스가능한 서버는 또한, 각각의 반사기에 대한 정보를 포함하고 있는 것 및 또한 상당한 다중 액세스가 가능하도록 부근에서의 이용가능한 대역폭을 관리하는 것에 부가하여, 각각의 모바일이 다른 모바일에 의해 발행된 결과를 사용함으로써 더 적은 수고로 정확하게 그 위치를 결정하는 것을 도울 수 있는 위치 측위 도움 정보를 교환할 수 있다. 이러한 도움의 일례는 반사기 내장 지연의 측정된 값이다. 일 실시형태에서, 각각의 모바일은 그 위치를 발행하고 그리고 또한 그것이 사용할 특정 지연 및 그 자신의 PRN 시퀀스 공식을 발행함으로써 반사기로서 역할할 수 있다. 그 후 모바일은 다른 모바일의 PRN을 알고 있을 것이고 그리고 다른 레이더 Tx 신호를 검출할 것이고, 그 후 그것은 발행된 양만큼 그것을 지연시킬 것이고, 그 후 그것을 다른 모바일의 동일한 PRN 시퀀스를 사용하여 코히어런트 되돌려 재송신할 것이다. 이것은 이러한 협업 모바일이 다른 반사기로서 역할하게 하여, 참 수동 주파수 스윕된 반사기가 제공할 수 있는 각도 정보가 없기는 하지만 부가적 조각의 레인징 정보를 제공한다.
도 1은 현재 개시된 실시형태에 따른 실내 위치결정 시스템의 기능적 블록 선도이다. 시스템은 위치가 결정될 모바일(185)을 포함한다. 모바일(185)은 어느 전자 디바이스(예컨대, 스마트폰)라도 될 수 있다. 시스템은 또한 서버(194)를 포함한다. 모바일(185)은 네트워크(192)를 통하여 서버(194)와 통신한다. 네트워크(192)는, 예컨대, 셀룰러 네트워크 또는 와이파이 네트워크일 수 있다. 시스템은 또한 위치 반사기(181)를 포함한다. 모바일(185)은 모바일(185)의 위치를 결정하는데 사용하기 위해 레이더 신호(182)를 송신하고 그리고 위치 반사기(181)로부터의 에코를 감지한다. 예시의 용이함을 위해, 도 1의 시스템은 하나의 위치 반사기만을 포함한다; 장소는 다수의 위치 반사기를 포함할 수 있다. 위치결정 시스템은 실내 사용에 특히 적당하기는 하지만, 그렇게 한정되지는 않는다.
레이더 신호를 송신하기 전에, 모바일(185)은 그 근사적(대략적) 위치 또는 인근을 결정할 수 있다. 예컨대, 모바일(185)은 현재 이용가능한 위치결정 방법을 사용할 수 있거나 또는 이러한 인근 결정에 사용될 수 있는 환경으로부터의 정보를 수집할 수 있다. 이러한 대략적 위치 결정의 일례는 어느 건물 또는 건물 집합에 모바일(185)이 있을 수 있는지 결정하도록 사용될 수 있는 마지막 기지의 실외 GPS 측위를 저장하는 것이다. 대안으로 또는 부가적으로, 모바일(185)은 기지의 위치를 가지는 이용가능한 와이파이 네트워크의 검출을 통해 그 근사적 위치를 좁힐 수 있다. 이러한 근사적 위치는 수십 또는 수백 미터의 불확실성을 갖는 위치일 수 있다. 이러한 근사적 위치를 사용하여, 모바일(185)은 서버(194)에 접속한다. 서버(194)는 기지의 그리고 발행된 인터넷 프로토콜(IP) 주소를 사용하여 통신될 수 있다. 모바일(185)로부터 서버(194)로의 접속은 인터넷을 통해 라우팅될 수 있다. 서버는 전용의 별개 서버일 수 있거나 또는 서버 팜으로부터 필요에 따라 임차한 용량을 갖는 공유된 서버일 수 있다.
서버(194)로의 접속을 확립하였고, 모바일(185)은 그 근사적 위치 또는 서버(194)가 모바일(185)의 대략적 위치를 근사할 수 있게 하는 어느 환경 정보라도 서버(194)에 보낸다. 그 후, 서버(194)는 모바일(185)의 근사적 위치 내에서 검출가능할 수 있는 반사기에 대한 반사기 데이터의 리스트를 모바일(185)에 보낼 수 있다.
그 후, 모바일(185)은 레이더 신호를 송신하고 그리고 서버 제공된 반사기 데이터 리스트 상의 반사기로부터의 반사를 경청한다. 아래에서 더 설명되는 바와 같이, 모바일(185)은 검출된 반사가, 반사기 데이터의 리스트를 사용하여, 어느 반사기로부터 유래하였는지, 반사기까지의 레인지, 반사기에서의 레이더 신호의 도래각(AOA), 또는 레인지와 AOA 양자를 결정할 수 있다. 반사기 데이터(예컨대, 반사기의 위치, 정향, 및 주파수 및 지연 특성에 대한 정보)를 사용하여, 모바일(185)은 그 위치를 정확하게 결정할 수 있다.
최초 정확한 위치가 결정되고 나면, 모바일(185)은 반사에 대한 그 검색을 바로 부근에 위치하고 있는 반사기로부터 유래할 수 있는 그들 반사로만 한정할 수 있다. 이것은 위치 결정 고정할 시간을 개선할 수 있고 정확도를 개선할 수 있는데 모바일(185)은 이제 바로 부근에 있는 훨씬 감축된 수의 반사기로부터 하나보다 많은 반사기를 검출하는 것을 향하여 더 많은 수고, 예컨대, 가설당 더 긴 상관 시간을 들일 수 있고 그리하여 정확도를 개선할 수 있기 때문이다. 그 위치를 정확하게 결정하였고, 그 후 모바일은, 예컨대, 각각의 반사기와 연관된 반송파 위상 사이클 누적을 추적함으로써, 그 원래 고정으로부터의 그 차분 위치 변화를 매우 정확하게 추적할 수 있다. 이것은, 그것이 연속적 추적에 기인하여 더 많은 프로세싱 및 더 많은 전력 소비를 사용할 수 있으므로, 가장 요구하는 애플리케이션에 대해서만 행해질 수 있다.
도 2는 현재 개시된 실시형태에 따른 일례의 측위를 예시한다. 도 2는 벽(200) 및 바닥을 갖는 일례의 실내 방을 도시한다. 여기에서 개시된 바와 같은 위치 측위 기술을 구비한 모바일(285)이 방에 있다. 도 2의 예에서, 위치 반사기(281)는 방의 구석에 부착된다. 모바일(285)이 그 위치를 결정하기를 원할 때, 그것은 특수 인코딩된 레이더 신호를 방출할 수 있다. 이러한 신호는 모바일(285)로부터 무지향성 방사할 수 있다. 이러한 신호 중 일부는 경로(203)를 따라 위치 반사기(281)의 방향으로 방사된다. 도 2의 예에서의 위치 반사기(281)는 입사 신호의 중심 주파수의 함수인, 수신 및 송신 양자에서의, 최대 이득의 각도를 갖는 주파수 스캐닝 안테나를 포함한다. 모바일(285)은 최대 반사 전력이 검출될 때까지 주파수에서의 방사 신호를 스캐닝한다. 모바일이, 예컨대, 서버 제공된 정보로부터 위치 반사기(281)의 위치, 정향, 및 주파수 스캐닝 특성을 이미 알고 있어, 모바일은 반사기로의 시선 벡터의 AOA 및 그리하여 경로(203)를 따라 반사기 위치와 모바일(285) 간 벡터의 방위각 및 고도각을 결정할 수 있다.
부가적으로, 모바일(285)은 반사 신호의 왕복 지연을 측정하고 모바일(285)과 위치 반사기(281) 간 레인지 거리를 계산한다. 방 내에서의 위치 및 정향이 알려져 있는 위치 반사기(281)와 모바일(285) 간 거리 및 2개의 각도를 결정하였고, 모바일(285)은 하나의 반사기만을 검출함으로써 3D 공간에서의 그 위치를 결정할 수 있다.
도 3은 현재 개시된 실시형태에 따른 다른 일례의 측위를 예시한다. 도 3의 공간은 도 2의 공간과 유사하다. 그렇지만, 도 3의 공간은 2개의 위치 반사기(제1 위치 반사기(381a) 및 제2 위치 반사기(381b), 일괄하여 위치 반사기(381))를 포함한다. 여기에서, 위치 반사기(381)의 각각은 완전히-결정된 위치 계산을 제공하여 더 높은 정확도를 초래할 수 있도록 2개의 AOA 각도 및 레인지를 내놓는다. 대안으로, 위치 반사기(381)는 단 하나의 각도 및 하나의 레인지 측정을 내놓는 더 단순한 유형의 반사기일 수 있다. 그래도, 이것은 2개의 보이는 위치 반사기만으로 완전히 결정된 위치 계산을 제공한다. 모바일이 3개 이상의 위치 반사기로부터의 반사를 검출할 수 있으면, 위치 반사기는 모바일이 그 위치를 결정하도록 각각 단일 AOA만, 각각 레인지 측정만, 또는 3개의 측정의 어느 최소 조합이라도 제공하기만 하면 된다. 그래도, 각각의 반사기는, 예컨대, 잘못된 위치 결정의 검출을 통해 더 나은 정확도 또는 강건함을 위해 2개의 AOA 및 레인지를 제공할 수 있다.
반사기 유형은 3개의 카테고리: 단순 수동 반사기, 주파수 스캐닝된 수동 반사기, 및 능동 재귀-지향성 반사기를 포함한다. 그들의 유형에 무관하게, 모든 반사기는 신호를 되돌려 반사하기 전에 내부 지연만큼 수신 레이더 신호를 지연시킨다. 이들 의도적으로 포함된 지연은 전형적으로는 0.5 마이크로초와 3 마이크로초 사이의 범위에 있다. 그것들은 4개의 목적을 제공한다. 첫번째는 그것들이, 대형 대향 거울과 같은, 기생 반사 물품으로부터의 모든 주변 다중경로 신호 및 에코가 사라질 때까지 신호를 지연시키는 것이다. 둘째로, 지연은 레이더 신호를 발신하는 것과 그것을 수신하는 것 사이의 시간을 증가시킨다. 이러한 증가된 시간은 모바일 디바이스가, 레이더 신호가 송신되고 있을 때, 능동 TX와, 신호 에코가 수신될 것으로 예상될 때, 능동 RX 간을 교번하는 것을 실현가능하게 한다. 이것은 RX와 TX가 동일한 주파수이기 때문인 자가-재밍 문제를 제거한다. 셋째로, 모바일 회로의 바람직한 실시형태는 직접 시퀀스 확산 스펙트럼 변조(DSSS)를 사용하는 레이더 신호를 방출하는 것이다. DSSS 수신기에서, 다른 반사기 및 환경으로부터의 에코는 그것들이 하나보다 많은 DSSS 칩 떨어져 도달하는 경우에만 구별될 수 있을 뿐이다. 반사기에서의 이들 삽입된 지연은 그것을 보증한다. 마지막으로, 이들 삽입된 그리고 상이한 지연은 모바일이 검출된 반사를 그들 각각의 반사기와 짝짓도록 식별 마크로서 역할한다.
반사기는 또한 이중-지연된-반사(DDR)라고 지칭되는 속성을 가질 수 있다. 반사기가 d 마이크로초의 지연 소자를 포함하면, 반사기는 그것이 신호를 수신하고 나서 d 마이크로초 후에 그것이 수신하는 신호를 최초 반향시킨다. DDR로는, 반사기가 2개의 에코를 발생시킨다. 제1 에코는 d 마이크로초만큼 지연되고 일차 반사라고 지칭될 수 있다. 제2 에코는 전력이 더 낮고(예컨대, 일차 반사 대비 -10dB) 그리고 2 d 또는 3 d 마이크로초만큼 지연된다. DDR은 반사기 지연에 대한 교정 요건을 제거하는 것을 용이하게 할 수 있다.
도 4는 현재 개시된 실시형태에 따른 위치 반사기의 기능적 블록 선도이다. 도 4의 위치 반사기는 단순 수동 반사기라고 지칭될 수 있다. 도 4의 위치 반사기는 도 1의 위치 반사기(181), 도 2의 위치 반사기(281), 또는 도 3의 위치 반사기(381)를 구현하는데 사용될 수 있다. 도 4의 위치 반사기는 안테나(410)를 포함한다. 안테나(410)는 정합 네트워크(420)를 통해 지연 소자(425)에 안테나 포트(411)를 접속한다. 정합 네트워크(420)는 저항기 네트워크, 트랜스포머, 또는 다른 수동 회로 소자를 포함할 수 있다. 일부 실시형태에서, 정합 네트워크는, 예컨대, 정합될 임피던스가 동일하거나 유사할 때 생략 또는 감축될 수 있다. 지연 소자(425)의 다른 포트는 접지에 접속한다. 안테나(410)에 의해 수신된 RF 신호는 정합 네트워크(420)를 통해 지연 소자(425)에 전달된다. 신호는 지연 소자(425)를 통해 하나 지연 주행하고 반대 포트에서 나타나 거기서 그것은 접지로의 단락에 의해 되돌아 지연 소자(425)를 통해 반사되고 그 후 안테나(410)로부터 재방사한다. 지연 소자(425)의 지연이 각각의 방향에서  마이크로초이면, 반사기는
마이크로초이면, 반사기는  마이크로초 Rx 대 Tx 지연을 갖는다. 부가적으로, 정합 네트워크(420)의 약간의 디튜닝(임피던스 부정합)을 통해, 지연 소자(425)로부터 되돌아 오는 지연된 신호의 일부분은 부가적 왕복을 위해 되돌아 지연 소자 내로 재주입되게 된다. 그리하여, 다른 반사가 시간
마이크로초 Rx 대 Tx 지연을 갖는다. 부가적으로, 정합 네트워크(420)의 약간의 디튜닝(임피던스 부정합)을 통해, 지연 소자(425)로부터 되돌아 오는 지연된 신호의 일부분은 부가적 왕복을 위해 되돌아 지연 소자 내로 재주입되게 된다. 그리하여, 다른 반사가 시간  마이크로초에 안테나에 의해 방사된다. 이러한 반사의 전력 레벨은 최초(일차) 반사보다 (예컨대, 정합 네트워크의 디튜닝에 종속하여 10dB 이상만큼) 더 낮다.
마이크로초에 안테나에 의해 방사된다. 이러한 반사의 전력 레벨은 최초(일차) 반사보다 (예컨대, 정합 네트워크의 디튜닝에 종속하여 10dB 이상만큼) 더 낮다.
도 5는 현재 개시된 실시형태에 따른 다른 위치 반사기의 기능적 블록 선도이다. 도 5의 위치 반사기는 도 4의 위치 반사기와 유사하며 유사한 참조 번호 요소는 유사한 기능을 수행한다. 도 5의 위치 반사기는 Rx와 Tx 경로를 분기하는 서큘레이터(527)를 포함한다. Rx 경로는 지연 소자(525)의 하나의 포트에 공급되고 지연 소자(525)의 다른 포트는 Tx 경로를 공급한다. 이러한 반사기에 대해, 최초 반사는  마이크로초 후에 오고 그리고 제2의 더 약한 반사는
마이크로초 후에 오고 그리고 제2의 더 약한 반사는  또는
또는  마이크로초 후에 온다. 2.4GHz 또는 5.0GHz 대역에서 이들 반사기를 동작시키는 것은 편리한 컴포넌트 소싱을 위해 제공할 수 있지만 그러한 반사기는 다른 주파수에서 작동할 수 있다. 지연 소자는 2.4GHz에 대해서는 SAW 또는 BAW 지연 라인일 수 있고 그리고 5.0GHz와 같은 더 높은 주파수에 대해서는 BAW 지연 라인일 수 있다.
마이크로초 후에 온다. 2.4GHz 또는 5.0GHz 대역에서 이들 반사기를 동작시키는 것은 편리한 컴포넌트 소싱을 위해 제공할 수 있지만 그러한 반사기는 다른 주파수에서 작동할 수 있다. 지연 소자는 2.4GHz에 대해서는 SAW 또는 BAW 지연 라인일 수 있고 그리고 5.0GHz와 같은 더 높은 주파수에 대해서는 BAW 지연 라인일 수 있다.
이들 단순 수동 반사기는 전력 소스를 포함하고 있지 않고 그로써 편리한 설치 및 서비스를 제공한다. 이들 반사기는 재생 이득 스테이지를 가지고 있지 않다. 그리하여, 지연 소자의 삽입 손실은 반사 신호 전력 레벨에 직접 영향을 미친다. 기가헤르츠 동작 주파수에서는, 지연 소자에서의 20dB 삽입 손실이 최초 반사에 대해 일어날 수 있다.
(예컨대, 도 4 및 도 5에 예시된 바와 같은) 단순 반사기는 레인징 정보만을 제공하고 AOA 정보는 제공하지 않는다. 3D 공간에서의 모바일의 위치를 결정하기 위해, 모바일은 부근 내 다수의 비-평면 반사기로부터의 반사를 얻을 수 있다.
도 6은 현재 개시된 실시형태에 따른 다른 위치 반사기의 기능적 블록 선도이다. 도 6의 위치 반사기는 주파수 스캐닝된 페이징된 어레이 안테나를 포함하고 그리고 주파수 스캐닝된 페이징된 어레이 반사기라고 지칭될 수 있다. 도 6의 위치 반사기는 도 1의 위치 반사기(181), 도 2의 위치 반사기(281), 또는 도 3의 위치 반사기(381)를 구현하는데 사용될 수 있다.
도 6의 위치 반사기는 안테나(610a-f)의 어레이를 포함한다. 안테나는 일직선 상에 배열될 수 있다. 안테나의 수 및 반사기의 선형 범위를 증가시키는 것은 방향성 이득을 증가시키고 그리고 주된 이득 로브의 3dB 빔 폭을 좁힌다. 안테나는 안테나 포트(611)를 통해 반사기에서의 다른 회로에 결합된다. 각각의 안테나는 거리(D)만큼 인접 안테나로부터 물리적으로 분리될 수 있다. 분리는 반사기와 사용된 신호의 중심 주파수의 파장의 절반에 대응할 수 있다.
복수의 송신 경로(612a-f)는 어레이의 안테나를 순차적으로 결합시킨다. 송신 경로는 지연 라인이라고 지칭될 수 있다. 안테나 포트(611)로부터의 신호는 제1 안테나(610a)로 라우팅되고 거기서 전력 분배기/결합기는 에너지의 몇 분의 일을 제1 안테나(610a)에 주고 나머지 에너지는 제1 송신 경로(612a)를 통하여 계속 가서 다른 안테나를 급전한다. 후속 안테나를 급전하는 신호는 접속 송신 경로에 의해 지연된다. 각각의 송신 패치는 전기적 길이(L)를 가질 수 있다. 마지막으로 안테나 전부를 급전한 후에, 신호는 종단(622)으로 종단된다. 종단(622)은 잔류 전력이 안테나로 되돌아 반사되는 것을 방지(또는 감축)하도록 송신 패치 및 안테나의 것과 정합하는 임피던스를 가질 수 있다.
반사기의 송신 경로 및 안테나의 이러한 구조는 주파수 스캐닝된 어레이라고 지칭될 수 있다(예컨대, "Introduction to Radar Systems", M. Skolnik, New York, McGraw-Hill, 제3판, 2001년, 제9장 참조). 2개의 인접 안테나 간 위상차( )는
)는  과 같고 여기서
과 같고 여기서  는 여기 파장이다. 그리하여,
는 여기 파장이다. 그리하여,  . 여기서
. 여기서 는 브로드사이드 방향으로부터 오프셋된 최대 반사의 각도이다. 최대 반사의 방향은 여기 파장()이
는 브로드사이드 방향으로부터 오프셋된 최대 반사의 각도이다. 최대 반사의 방향은 여기 파장()이  , 최대 브로드사이드 방사가 일어나는 중심 파장으로부터 이탈함에 따라 변화한다. 예컨대,
, 최대 브로드사이드 방사가 일어나는 중심 파장으로부터 이탈함에 따라 변화한다. 예컨대,  이면, 여기 주파수를
이면, 여기 주파수를  만큼 달리하는 것은
만큼 달리하는 것은  의 스윕을 초래한다.
의 스윕을 초래한다.  스캔에 이용가능한 충분한 대역폭을 갖는 일 실시형태에서는, 이러한 단순 구조가 여기에서 설명된 바와 같은 실내 위치결정에 사용될 수 있다. 다른 실시형태에서, 스캐닝에 이용가능한 주파수 스팬은 중심 주파수의
스캔에 이용가능한 충분한 대역폭을 갖는 일 실시형태에서는, 이러한 단순 구조가 여기에서 설명된 바와 같은 실내 위치결정에 사용될 수 있다. 다른 실시형태에서, 스캐닝에 이용가능한 주파수 스팬은 중심 주파수의  보다 많지 않을 수 있다. 그러한 시나리오 하에서, 2개의 기술이 사용될 수 있다. 일 실시형태에서, L은 이용가능한 BW를 갖는 주된 이득 로브의
보다 많지 않을 수 있다. 그러한 시나리오 하에서, 2개의 기술이 사용될 수 있다. 일 실시형태에서, L은 이용가능한 BW를 갖는 주된 이득 로브의  스캔을 가능하게 하는데 필요한 만큼 크게 이루어진다. 송신 경로는 적합한 길이의 매립된 송신 라인으로 이루어질 수 있다. 24GHz 민간 레이더 대역과 같은 높은 주파수에서, 필요한 길이(L)는 관리가능하다. 그렇지만, 5GHz 대역 아래와 같은 더 낮은 주파수에 대해, 큰 L/D는 물리적으로 큰 상당히 긴 송신 라인을 필요로 한다. 그러한 실시형태는 크기를 관리가능하게 유지하도록, 예컨대, 부하 있는 송신 라인, 강자성 도파관, BAW 필터, SAW 필터, 분포 LC 지연 라인, CRLH 메타-재료 지연 라인 구조, 세라믹 도파관, 및/또는 마이크로-전자-기계 시스템(MEMS) 지연 라인을 사용할 수 있다. 또한, 매우 높은 L/D 인자가 소망되면 이들 수동 지연 라인 내 손실을 감축하도록 지연 경로에 능동 이득 컴포넌트가 삽입될 수 있다.
스캔을 가능하게 하는데 필요한 만큼 크게 이루어진다. 송신 경로는 적합한 길이의 매립된 송신 라인으로 이루어질 수 있다. 24GHz 민간 레이더 대역과 같은 높은 주파수에서, 필요한 길이(L)는 관리가능하다. 그렇지만, 5GHz 대역 아래와 같은 더 낮은 주파수에 대해, 큰 L/D는 물리적으로 큰 상당히 긴 송신 라인을 필요로 한다. 그러한 실시형태는 크기를 관리가능하게 유지하도록, 예컨대, 부하 있는 송신 라인, 강자성 도파관, BAW 필터, SAW 필터, 분포 LC 지연 라인, CRLH 메타-재료 지연 라인 구조, 세라믹 도파관, 및/또는 마이크로-전자-기계 시스템(MEMS) 지연 라인을 사용할 수 있다. 또한, 매우 높은 L/D 인자가 소망되면 이들 수동 지연 라인 내 손실을 감축하도록 지연 경로에 능동 이득 컴포넌트가 삽입될 수 있다.
대안의 실시형태에서는,  스캔이 N개의 인접하는 섹터 간에 나뉜다. 각각의 섹터는
스캔이 N개의 인접하는 섹터 간에 나뉜다. 각각의 섹터는  스캔 능력을 가질 수 있다. 각각의 섹터는 최소
스캔 능력을 가질 수 있다. 각각의 섹터는 최소  각도를 스캐닝할 수 있는 주파수 스캐닝 반사기를 포함할 수 있다. 모든 병설된 섹터링된 스캐닝 안테나가 동일한 방향으로, 예컨대, 시계방향으로 스캐닝하게 하는 것은 섹터 경계에서 하나의 안테나 섹터만이 최대 이득에 있을 것임을 보증한다. 섹터들 간 구별하는 것은, 예컨대, 여기에서 설명된 반사기들 간 구별하기 위한 다양한 방법론을 사용할 수 있다.
각도를 스캐닝할 수 있는 주파수 스캐닝 반사기를 포함할 수 있다. 모든 병설된 섹터링된 스캐닝 안테나가 동일한 방향으로, 예컨대, 시계방향으로 스캐닝하게 하는 것은 섹터 경계에서 하나의 안테나 섹터만이 최대 이득에 있을 것임을 보증한다. 섹터들 간 구별하는 것은, 예컨대, 여기에서 설명된 반사기들 간 구별하기 위한 다양한 방법론을 사용할 수 있다.
도 6의 위치 반사기는 정합 네트워크(620)를 통하여 안테나 포트(611)에 결합된 제1 포트를 갖는 지연 소자(625)를 포함한다. 지연 소자는 도 4의 지연 소자(425)와 동일하거나 유사할 수 있다(예컨대, BAW 또는 SAW 필터와 같은, RF 지연 수동 디바이스). 지연 소자(625)의 다른 포트는 접지에 단락된다. 여기에서, 반사기 상의 입사 방사는 반사기로부터의 재-방사 전에 지연 소자(625) 내에서 왕복 지연만큼 지연된다. 지연은 신호를 반사기로부터 되돌려 모바일로 반사하기 전에 부근 내 다른 기생 반사가 잦아들 수 있게 한다. 이것은 방 다중경로의 효과를 상당히 감축하고 모바일에서의 SNR을 개선할 수 있다.
일 실시형태에서, 지연 소자(625)의 지연은 어느 자유 대기 왕복 지연보다도 더 길고 그리고 인근 반사기는 다른 지연을 가져서, 예컨대, 레이더 신호를 인코딩하는데 선형 주파수 변조(LFM), 비-선형 FM, 또는 윈도잉된 (LFM)을 사용할 때 여러 다른 반사기로부터 유래하는 반사들 간을 모바일이 구별할 수 있게 한다.
일 실시형태에서, 모바일로부터 방사된 신호는 직접 시퀀스 확산 스펙트럼(DSSS) 기술을 사용하여 변조된다. 이것은, 예컨대, 소정 칩 레이트에서, 참 난수 시퀀스(TRN), 또는 의사 난수(PRN) 시퀀스를 채용하는 BPSK 또는 QPSK 변조를 사용함으로써 행해진다. 소정 반사기에 대한 지연 소자(625)의 지연이 하나보다 많은 PRN 칩 주기만큼 다른 반사기와 다르면, 그때 모바일은 여러 다른 반사기로부터 유래하는 다수의 반사들 간을 구별할 수 있다.
일 실시형태에서, 정합 네트워크(620)는 지연 소자(625)와 안테나 구조 간 완벽한 정합을 제공하는 것으로부터 약간 디튜닝된다. 이것은 입사 신호의 일부분은 지연 소자(625)를 통해 하나의 왕복 지연 후에 되돌아 재방사되고 그리고 일부분은 되돌아 지연 소자(625) 내로 반사되는 결과를 초래한다. 이것은 입사 레이더 신호에 응답하여 반사기에 의해 다수의 반사가 재-방사되는 결과를 초래한다. 가장 강력한 반사는 후에 일어나고, 여기서
후에 일어나고, 여기서  는 모바일로부터 반사기까지의 자유 대기 비행 시간이고 그리고
는 모바일로부터 반사기까지의 자유 대기 비행 시간이고 그리고  는 지연 소자(625)를 통한 일방향 지연이다. 다른 더 약한 반사는
는 지연 소자(625)를 통한 일방향 지연이다. 다른 더 약한 반사는  후에 방출된다. 이들 2개의 식으로부터, 모바일은
후에 방출된다. 이들 2개의 식으로부터, 모바일은  및
및  을 정확하게 계산하고 그리하여 (예컨대, 온도 또는 노화에 기인하는) 지연 소자(625)에서의 지연 드리프트를 보상하고 그리고 그리하여 반사기까지의 레인지를 정확하게 결정할 수 있다.
을 정확하게 계산하고 그리하여 (예컨대, 온도 또는 노화에 기인하는) 지연 소자(625)에서의 지연 드리프트를 보상하고 그리고 그리하여 반사기까지의 레인지를 정확하게 결정할 수 있다.
도 7은 현재 개시된 실시형태에 따른 다른 위치 반사기의 기능적 블록 선도이다. 도 7의 위치 반사기는 도 6의 위치 반사기와 유사하며 유사한 요소는 유사한 기능을 수행한다. 도 7의 위치 반사기는 확산 렌즈(715)를 포함한다. 경로(703)를 따라 안테나 구조를 떠나는 방사는 확산 렌즈(715)를 통과하고 거기서 그것은 회절되고 경로(704)를 따라 계속 간다. 이것은 소정 주파수 스윕에 대해 안테나 스캔 각도를 증가시키는 효과를 가진다. 이러한 안테나 구조는 더 높은(예컨대, >10GHz) 주파수에서 특히 실용적일 수 있다. 이러한 렌즈는, 예컨대, 콜리메이팅 렌즈에 비해 역 지향성을 갖는다.
도 6 및 도 7에서의 안테나 구조는 하나의 방향으로의 스캐닝을 제공하고 그리하여 하나의 AOA를 제공할 수 있다. 단일 반사기 위치 결정에 2개의 AOA를 제공하기 위해서, 실내 위치결정 시스템은 2개의 직교 각도를 제공하도록 서로에 직교하여 장착 및 병설된 반사기 구조의 2개의 사본을 사용할 수 있다. 이들 반사기에 대한 많은 변형이 가능하고, 예컨대, 소자의 비-균일 어레이를 갖는 반사기이다. 다른 반사기 변형에서는 메타-재료에 기반하는 반사기 안테나를 사용한다. 이러한 반사기의 일례는 메타-재료 CRLH 누설 파 수동 재귀-지향성 반사기에 지연 소자를 부가한다(예컨대, "Electromagnetic Metamaterials: Transmission Line Theory and Microwave Applications", 2005년, Christophe Caloz 및 Tatsuo Itoh, 6.4.1절 참조). 여기에서 설명된 바와 같은 지연 소자는 안테나 단자와 단락 사이에 삽입되어 지연을 갖는 재귀-지향성 반사기를 생성하여 레이더 프로세싱을 단순화할 것이다. 그러한 반사기는 유익하게는 재귀-지향성, 수동이고, 하나의 누설 방사 소자를 가지고 그리하여 하나의 지연 소자만을 사용할 수 있다. CRLH(메타-재료)로 제작되는 것은 더 넓은 반사 각도(예컨대, 거의 180도)를 허용하는 것을 통해 표준 재료 누설 파 안테나 성능에 대해 개선할 수 있다.
도 8은 현재 개시된 실시형태에 따른 다른 위치 반사기의 기능적 블록 선도이다. 도 8의 위치 반사기는 위상 공액 어레이(PCA) 반사기라고 지칭될 수 있다. 그러한 반사기는, 예컨대, 위치 반사기에서 전력 소스가 이용가능할 수 있는 상업용 설치에서 특히 적합할 수 있다. 큰 공간당 몇 반사기만이 사용되므로, 전력 소스의 수는 작다.
도 8의 위치 반사기는 반사기 소자(815a-d)의 어레이를 포함한다. 각각의 반사기 소자는 안테나(810)를 포함한다. 안테나는 안테나 포트(811)에서 정합 네트워크(820)를 통하여 지연 소자(825)의 제1 포트에 결합된다. 지연 소자(825) 및 정합 네트워크(820)는 다른 반사기에 대해 설명된 바와 같이 구현될 수 있다. 마찬가지로, 정합 네트워크(820)는 이중 지연된 반사를 제공하도록 디튜닝될 수 있다. 지연 소자의 제2 포트는 반사기 혼합기(829)에 결합된다. 반사기 혼합기(829)는 국부 발진기(845)로부터의 신호와 혼합된 입사 신호인 신호를 반사한다. 도 8에서 예시된 바와 같이, 반사기 혼합기(829)는 서큘레이터 및 혼합기를 포함할 수 있다. 서큘레이터는 지연 소자(825)에 결합된 제1 단자, 제1 혼합기 입력에 결합된 제2 단자, 및 혼합기 출력에 결합된 제3 단자를 갖는다. 혼합기는 국부 발진기에 결합된 제2 입력을 가지고 그리고 제1 입력과 제2 입력 상의 신호를 혼합함으로써 혼합기 출력을 산출한다. 혼합기는 능동 또는 수동일 수 있다.
국부 발진기 주파수가 입사 파의 주파수의 2배이면, PCA는 입사 파를 재귀-지향성 되돌려 소스로 향하여 반사한다. 이러한 재귀-지향성은 여기 주파수가 국부 발진기 주파수의 절반으로부터 더 많이 이탈할수록 감축될 수 있다. 이러한 주파수 감도는 다른 중심 주파수를 갖는 가까운 옆 반사기들 간을 구별하는데는 물론 모바일이 소정 반사기의 재귀-지향성 중심 주파수 주위 송신 주파수를 디더링함으로써 반사기에서의 AOA를 구하는 방식을 제공하는데에도 사용될 수 있다. 부가적으로, PCA에 대한 이격은 중요하지 않고 그리하여 구조는 지지 벽, 천장 또는 바닥 가까이에 따를 수 있다.
도 8의 반사기는 디지털 위상 시프터(840)를 포함한다. 위상 시프터(840)는  또는
또는  왕복 위상 시프트를 산출하도록 데이터 시퀀스에 의해 국부 발진기로부터의 신호를 변조한다. 데이터 시퀀스는 낮은 데이터 레이트(예컨대, 모바일 DSSS 신호의 칩핑 레이트보다 더 낮은 레이트 크기 차수)를 갖는 짧은 반복 코드일 수 있다. 데이터 시퀀스의 데이터 레이트가 칩핑 레이트보다 훨씬 더 느리기 때문에, 모바일은 그 신호를 검출할 수 있고 그리고 동시에 반사기로부터의 송신 데이터 비트를 재구성할 수 있다. 이들 데이터 비트는 각각의 반사기를 고유하게 식별시킬 수 있다. 모바일은, 예컨대, 50 Hz 데이터 스트림을 복구하도록 GPS 수신기에서 사용된 것들과 유사한 기술을 사용할 수 있다. 위상 시프터를 사용하여 데이터 시퀀스를 시그널링하는 이러한 기술은 다른 위치 반사기, 예컨대, 도 4의 반사기에 사용될 수 있다.
왕복 위상 시프트를 산출하도록 데이터 시퀀스에 의해 국부 발진기로부터의 신호를 변조한다. 데이터 시퀀스는 낮은 데이터 레이트(예컨대, 모바일 DSSS 신호의 칩핑 레이트보다 더 낮은 레이트 크기 차수)를 갖는 짧은 반복 코드일 수 있다. 데이터 시퀀스의 데이터 레이트가 칩핑 레이트보다 훨씬 더 느리기 때문에, 모바일은 그 신호를 검출할 수 있고 그리고 동시에 반사기로부터의 송신 데이터 비트를 재구성할 수 있다. 이들 데이터 비트는 각각의 반사기를 고유하게 식별시킬 수 있다. 모바일은, 예컨대, 50 Hz 데이터 스트림을 복구하도록 GPS 수신기에서 사용된 것들과 유사한 기술을 사용할 수 있다. 위상 시프터를 사용하여 데이터 시퀀스를 시그널링하는 이러한 기술은 다른 위치 반사기, 예컨대, 도 4의 반사기에 사용될 수 있다.
도 8의 반사기는 레인지 정보를 제공할 수 있지만 AOA 정보를 모바일에 제공하지는 않을 수 있다. 그렇지만, 그러한 반사기는 모바일 신호를 재귀-지향성 반사하고 그리하여 부근 내에서 동시에 서비스 제공받을 수 있는 모바일의 수를, 예컨대, RF 공간 다이버시티 및 더 낮은 필요한 SNR에 기인하여 증가시킨다. 이것은 많은 사용자를 갖는 대형 장소에, 예컨대, 몰, 스포츠 경기장 등에서 특히 중요하다.
각각의 PCA-기반 반사기는 하나의 레인지 측정을 내놓는다. 모바일은 이들 PCA 기반 반사기 중 4개 이상으로부터 반사를 검출함으로써 그 위치를 정확하게 검출할 수 있다. 정확한 레인징을 위해, 여러 다른 반사기 소자(815)에서의 지연 소자(825)들은 타이트 정합되어야 한다. 반사기는 능동 디바이스이므로, 예컨대, SAW 또는 BAW 디바이스 대신에 디지털 지연 라인이 사용될 수 있다. 디지털 지연 라인은 신호를 더 낮은 주파수로 변환하기 위한 하향 변환기, 아날로그-대-디지털 변환기, 디지털 지연 시프트 레지스터, 그 다음에 디지털-대-아날로그 변환기, 및 신호를 그 원래 주파수로 복귀시키기 위한 상향 변환기를 포함할 수 있다. 이러한 방식으로 실현된 지연 소자는 완벽하게(또는 거의 그렇게) 정합된다. 대안으로, 경로는 하나의 경로로 결합되고 하나의 SAW 또는 BAW 지연 소자로 보내질 수 있다. 동일한 SAW 또는 BAW를 통과한 후에, 신호는 다시 그들 자신의 별개 경로로 분기된다. 신호는 주파수 분할 또는 코드 분할 RF 기술을 사용함으로써 동일한 지연 소자를 통과하는 동안 혼합되지 않게 유지될 수 있다. 그러한 접근법은 하나의 지연 소자만을 사용한다. 각각의 경로가 동일한 물리적 SAW 또는 BAW 소자에 의해 지연되기 때문에, 지연은 정합된다.
도 8의 반사기의 변형에서, 신호 전부는 CDMA 기술을 사용하여 하나의 지연 소자를 통해 멀티플렉싱된다. 각각의 정합 회로(820)로부터의 신호는 서큘레이터를 통과해 Tx 경로와는 별개의 Rx 경로로 간다. 각각의 안테나의 Rx 경로는 그 후 각각의 경로에 고유한 PN 시퀀스와 혼합된다. PN 혼합 후에, 경로 전부는 결합되고 동일한 지연 소자를 통과한다. 지연 소자를 빠져나가, 결합된 신호는 안테나당 하나의 경로로 분기된다. 그 후, 각각의 경로는 결합 전에 사용된 그 대응하는 PN 시퀀스와 다시 혼합되지만 공통 지연 소자의 기지의 지연만큼 지연된다. 신호는 혼합 고조파를 제거하도록 대역-통과 필터를 통과한다. 그 후, 각각의 경로는 그들 위상 공액 신호를 발생시키도록 (레이더 신호의 중심 주파수의 2배인) 국부 발진기(포함될 때 위상 시프트 후) 주파수와 혼합된다. 이러한 혼합 후에, 신호는 고조파 및 높은 주파수 적 성분을 제거하도록 필터링되고 그 후 경로 서큘레이터의 Tx측으로 전달된다. 위의 것을 행함에 있어서, 각각의 수신 신호는 공액화되고 모든 다른 경로와 동일한 지연만큼 지연되는데 모든 경로가 동일한 지연 소자를 사용하기 때문이다. 완전 구조는 그때 내장 지연을 갖는 재귀-지향성 반사기이다.
다른 실시형태에서, 반사기는 위에서 예시 및 설명된 유형의 4개 이상의 반사기를 포함하는 복합 반사기이며, 여기서 각각은 재귀-지향성이고 그리고 각각으로부터의 반사는 복합 반사기 내 다른 것들과 구별가능하다. 반사기는 방위 및 고도 각도 결정을 제공하기 위해 단일 선형 라인을 따라 있지 않도록 배열된다. 복합 반사기 내 반사기의 각각 간 위상차는 RAKE 수신기에 의해 구별되고 그리하여 복합 반사기에서의 2개의 AOA가 결정될 수 있다.
복합 반사기 내 이웃 반사기들 간 거리가 하나보다 많은 파장이고 그리하여 정수 파장 모호성은 올바른 AOA 결정을 위해 분해되어야 하므로 3개보다 많은 반사기가 사용된다. 모호성을 분해하기에 충분한 정보를 발생시키기 위해 부가적 반사기는 등거리에 배치되어서는 안된다. 복합 반사기 내 반사기들 간 정수 모호성을 분해하도록 중심 주파수 디튜닝, 반사된 전력, 및 주파수 디더링이 또한 사용될 수 있다.
도 9는 현재 개시된 실시형태에 따른 위치 반사기의 등측도이다. 도 9의 위치 반사기는, 예컨대, 도 6, 도 7 및 도 8의 반사기를 구현하는데 사용될 수 있다. 반사기는 상부층 및 하부층에 부가하여 다수의 전도 구리층을 갖는 인쇄 회로 기판(911)을 포함한다. 상부층(912)은 여러 방사 소자(안테나)(910)를 포함하고 있도록 패터닝된다. 이들 방사 소자는, 예컨대, 소망의 방사 패턴에 기반하여 어느 기하학적 형상이라도 될 수 있다. 방사 소자는 단지 명확한 예를 제공하기 위해 직사각형으로 예시된다. 상부층과 하부층 사이에 있는 층은 분기 급전 네트워크를 구축하는데 사용될 수 있다. 하부층은 수동 또는 능동 회로를 장착하도록 트레이스를 가질 수 있다. 방사 소자가 수평으로 반복되므로, 최대 방사의 방향은 평면(902)과 일치하는 벡터(903)와 정렬된다. 이러한 가상 평면은 방사 소자(910)의 수평 분포에 기인하여 수평선과 반사기를 교차시킨다. 그렇지만, 방사 소자(910)의 형상에 종속하여, 평면(902)은 반사기의 평면에 법선일 필요는 없다. 또한, 방사 소자는 똑같을 필요는 없다. 또한, 방사 소자들 간 페이징은 주파수와 최대 방사 방향의 비대칭 스캐닝을 초래하는 방식으로 행해질 수 있음을 주목한다. 예컨대, 벡터(903)는 좌측보다 우측으로 더 스캐닝할 수 있다.
도 10은 현재 개시된 실시형태에 따른 위치 반사기의 평면도이다. 도 10의 반사기는 섹터링된 반사기라고 지칭될 수 있다. 섹터링된 반사기에 대해, 각각 다른 페이징 바이어스를 갖는, 도 9의 다수의 선형 반사기는 서로 옆에 적층되어 평탄한 섹터링된 반사기를 초래한다.
도 11은 현재 개시된 실시형태에 따른 다른 위치 반사기의 평면도이다. 도 11의 반사기는 2개의 AOA를 내놓을 수 있다. 반사기는 2개의 인접 반사기를 포함한다. 각각은, 예컨대, 도 9에 도시된 바와 같은 단일 선형 반사기 또는 도 10에 도시된 바와 같은 섹터링된 반사기일 수 있다. 제1 반사기(1120)는 수평 방사 평면으로 정향되고, 그리고 제2 반사기(1121)는 방사 평면이 수직이게 되도록 제1 반사기(1120)에 비해 회전되어 있다.
도 12는 현재 개시된 실시형태에 따른 송신 및 수신 레이더 체인의 기능적 블록 선도이다. 송신 체인(1205) 및 수신 체인(1255)은, 예컨대, 상보적 금속 산화물 반도체(CMOS) 시스템-온-어-칩 집적 회로를 사용하여 모바일 디바이스에 구현될 수 있다. 예시된 송신 및 수신 체인은 예시이고 그리고 다른 적합한 배열이 또한 사용될 수 있다.
송신 체인(1205)은 I 및 Q 변조기를 포함한다. 송신 체인(1205)에 대해, 동상(TX_I) 및 직교-위상(TX_Q) 값에 대한 디지털 데이터 샘플은, 예컨대, 디지털 신호 프로세서(DSP)로부터 공급된다. I 및 Q 샘플 스트림은 DC 중심, 또는 낮은 IF 중심 샘플링된 데이터를 반송하고 있을 수 있다. 데이터는, 안티-에일리어싱 필터를 또한 포함하고 있을 수 있는, 디지털-대-아날로그 변환기(DAC)(1231, 1232)를 사용하여 아날로그 레벨로 변환된다. DAC의 샘플링 클록은 코히어런스를 유지하고 있도록 국부 발진기(LO)와 동기화될 수 있다. 샘플 클록은 에일리어싱을 회피하도록 적어도 송신 신호의 대역폭의 2배이다. 위상 고정 루프(PLL)(1225)를 포함하고 있는 국부 발진기(LO)는 주파수 참조(1240)에 위상 고정되고 그리고 I 및 Q RF 혼합기(1221, 1222)를 사용하여 기저 대역 I 및 Q 신호를 반송파 주파수로 상향 변환하도록 IQ 신호를 발생시킨다. 상향 변환된 I 및 Q 신호는 합산 네트워크(1215)에서 합산 및 필터링된다. 그 후, 결합된 신호는, 기저대역 또는 애플리케이션 프로세서에 있을 수 있는, 전력 제어 알고리즘에 의해 제어되는 바와 같이 송신 출력 전력을 조절하도록 가변 이득 증폭기(1213)를 통과한다. 그 후, 신호는 스퓨리어스 대역 외 방출을 제거하도록 대역 선택 필터(1211)를 통과하고 그 후 송신 안테나(1210)에 전달된다.
수신 체인(1255)에 대해, 수신된 신호는 대역-외 신호를 거절하고 전반적 신호-대-잡음 비(SNR)를 개선하도록 대역 선택성 필터(1261)에 수신 안테나(1260)로부터 우선 라우팅된다. 그 후, 신호는 가변 이득 및 가변 IP3 저잡음 증폭기(LNA)(1263)에 공급된다. LNA(1263)로부터 나와, 신호는 전력 분배기(1265)를 사용하여 분기된다. 분기 신호는 RF 혼합기(1271, 1272)를 사용하여 기저 대역 또는 낮은 IF I 및 Q 신호 스트림으로 하향 변환된다. 그 후 신호는 결합된 필터 및 아날로그-대-디지털 변환기 블록(ADC)(1281, 1282)에 의해 필터링 및 샘플링된다. 수신 PLL LO 발생기(1275)로부터의 수신 LO 및 ADC 클록은 양자가 주파수 참조(1240)와 그리하여 송신 체인과 동기화되고 그로써 코히어런스를 유지하고 있다. ADC로부터의 디지털 샘플은 동상 샘플(RX_I) 및 직교 샘플(RX_Q)로서 수신 체인을 빠져나간다. I 및 Q 수신 디지털 데이터 스트림은 추가적 프로세싱을 위해 모바일에서의 수신 DSP에 보내진다.
도 12의 송신 및 수신 체인은 별개의 안테나를 사용한다. 이러한 실시형태는 하프 듀플렉스에 사용될 수 있고 그리고 풀 듀플렉스 동작 동안 소정 TX-RX 격리를 제공할 수 있다.
도 13은 현재 개시된 실시형태에 따른 대안의 안테나 배열을 갖는 추가적 송신 및 수신 레이더 체인의 기능적 블록 선도이다. 도 13에 예시된 실시형태는 도 12의 그것과 유사하지만 송신 체인과 수신 체인이 안테나를 공유한다. 송신 체인(1307) 및 수신 체인(1355)은 송신/수신(T/R) 스위치(1307)를 통해 하나의 안테나(1310)에 접속된다. T/R 스위치(1307)는 안테나를 송신 체인(1305) 또는 수신 체인(1355) 중 어느 하나에 교번 접속시킨다. 이것은 레이더 신호의 송신 및 수신이 하프 듀플렉스에서 행해지는 경우에 사용된다. 하프 듀플렉스 동작에서, 모바일은 단시간 동안 레이더 신호를 송신하고 그 후 송신기를 오프로 하고 반사를 경청한다. 이러한 배열의 이점은 모바일이 반사를 경청하고 있을 때 송신 레이더 신호가 오프로 되어 있고 그리하여 Tx/Rx 누설에 면역성이 있다는 것이다. 그렇지만, 하프 듀플렉스는 다수의 구별되는 지연을 갖는 다수의 반사기가 존재할 때 Rx/Tx 스케줄링을 복잡하게 만들 수 있다.
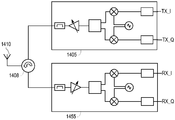
도 14는 현재 개시된 실시형태에 따른 다른 대안의 안테나 배열을 갖는 추가적 송신 및 수신 레이더 체인의 기능적 블록 선도이다. 도 14의 실시형태는 도 13의 그것과 유사하지만 대안의 안테나 접속을 사용한다. 도 14에서, 송신 체인 및 수신 체인 양자는 풀 듀플렉스 동작으로 동시에 동작하고 있을 수 있다. 신호는 서큘레이터(1408)를 통해 안테나(1410)에 라우팅된다. 서큘레이터(1408)는, 예컨대, 약 20dB Rx-Tx 격리를 제공할 수 있다. Tx 신호의 감쇠된 사본을 측정하고 그리고 그것을 에코 소거 디지털 신호 프로세싱을 사용하여 Rx 신호로부터 소거함으로써 부가적 격리가 행해질 수 있다. 마지막으로, 부가적 격리는 반사기의 하나보다 더 긴 칩 주기 내장 지연에 기인하여 Tx와 Rx DSSS 신호 간 하나보다 많은 칩 지연 오프셋에 의해 제공될 수 있다.
도 14의 배열을 사용하는 모바일에서는, Tx와 Rx 양자가 동시에 동작할 수 있더라도, Tx 신호는, 예컨대, Tx 이득 스테이지 및 전력 증폭기를 오프로 함으로써 주기적으로 침묵할 수 있다. 예컨대, 위치 반사기가 약 3 마이크로초를 클러스터링하는 지연을 가지면, Tx 신호는 3 마이크로초 동안 송신되고 6 마이크로초 동안 오프로 된다. 송신하는 동안, 수신기는 오프로 되어 있다. Tx가 오프로 될 때, Rx 섹션은 데이터를 수신 및 프로세싱한다. 6 마이크로초는 DDR의 일차 및 이차 반사를 수신하는데 사용된다. DSSS 신호를 사용하여, 이것은 -4.8 dB 손실을 초래할 수 있지만 설계를 대단히 단순화할 수 있는데, 예컨대, 그것이 자가-재밍을 제거하기 때문이다.
도 15는 현재 개시된 실시형태에 따른 측위 신호 프로세싱의 기능적 블록 선도이다. 측위 신호 프로세싱은 위치 측위를 위해 모바일에 의해 수행될 수 있다. 송신 디지털 신호 프로세서(1507)는 동상(TX_I) 및 직교-위상(TX_Q) 값을 공급한다. 그 값은, 예컨대, 도 12의 송신 체인(1205)에 공급될 수 있다. 수신 디지털 신호 프로세서(1557)는 동상(RX_I) 및 직교-위상(RX_Q) 값을 수신한다. 그 값은, 예컨대, 도 12의 수신 체인(1255)으로부터 수신될 수 있다. 송신 디지털 신호 프로세서(1507) 및 수신 디지털 신호 프로세서(1557)는 물리적으로 겹치지 않을 수 있거나 또는 송신 및 수신 프로세싱 알고리즘 양자를 병행 실행하는 동일한 프로세서일 수 있다. 송신 디지털 신호 프로세서(1507) 및 수신 디지털 신호 프로세서(1557)는 애플리케이션 프로세서(1559)에 의해 관리될 수 있다. 송신 및 수신 데이터 스트림을 프로세싱하는 것에 부가하여, 다양한 조합에서, 송신 디지털 신호 프로세서(1507), 수신 디지털 신호 프로세서(1557), 및 애플리케이션 프로세서(1559)는, 여러 다른 RF 체인 북 키핑 동작 중에서도, LO 주파수 선택, Tx 출력 전력 제어, Rx 입력 저잡음 증폭기(LNA) 이득 및 IP3 제어, T/R 스위치 제어, 및 송신/수신 스케줄링과 같은, 송신 및 수신 체인의 다른 태양을 제어한다. 프로세싱을 위한 프로그래밍가능한 블록을 사용하는 것은 소정 송신 파형에 대한 AOA 및 레인지를 검출하도록 수신 체인에서의 적합한 가역 프로세싱과 함께 송신 레이더 신호에 대한 적합한 변조 방법, 대역폭, 및 중심 주파수를 선택하는데 상당히 큰 융통성을 모바일에 준다.
도 16은 현재 개시된 실시형태에 따른 송신 측위 신호 프로세싱의 기능적 블록 선도이다. 도 16의 블록은, 예컨대, 도 15의 송신 디지털 신호 프로세서(1507)에서 사용될 수 있다. 도 16의 송신 측위 신호 프로세싱은 {+1,-1} 샘플의 의사-랜덤 시퀀스를 발생시키는 송신 의사-잡음 발생기(1609)를 포함한다. 송신 의사-잡음 발생기(1609)는 선형 피드백 시프트 레지스터(LFSR)를 사용하여 최대 다항식에 의해 시퀀스를 발생시킬 수 있다. 송신 로테이터(1604)는 송신 I 및 Q 샘플을 회전시킬 수 있다. 일 실시형태는 I 채널 상에 BPSK 변조가 있고 Q 채널 상에 아무것도 없는 샘플을 사용할 수 있다. 이들 I 및 Q 샘플은 Tx 체인의 다음 스테이지에 전달되기 전에 송신 로테이터(1604)에서 회전된다. 송신 로테이터(1604)는 송신 신호의 중심 주파수를 시프트하는데 사용된다. 로테이터는 송신 램프 발생기(1608)에 의해 구동된 직접 디지털 합성기(DDS)(1606)로부터 샘플당 회전의 각도 증분을 수신한다. 송신 램프 발생기(1608)는 영 주파수 오프셋으로부터 시작하여 기저 대역에서의 샘플링 주파수의 절반과 같은 오프셋까지 프로그래밍가능할 수 있다. 시스템의 주 프로세서는 송신 램프 발생기(1608)를 사용하고 또한 엔드 주파수 시프트 및 주파수 시프트의 속도(Hz/초)로 로딩하도록 적합한 다항식으로 송신 의사-잡음 발생기(1609)를 프로그래밍할 수 있다. 그 후, 주 프로세서는 시작 커맨드를 발행할 수 있고 이 경우 송신 의사-잡음 발생기(1609) 및 송신 램프 발생기(1608)는 동기식으로 동작을 개시한다. 그리하여, 각각의 순시 시프트 주파수는 PN 코드의 PN 위상에 타이트 정렬된다.
송신 측위 신호 프로세싱은 또한 Rx 신호 체인측에서 사용될 수신 의사-잡음 발생기(1659), 수신 램프 발생기(1558), 및 수신 DSS(1656)를 포함한다. 수신 의사-잡음 발생기(1659)는 송신 의사-잡음 발생기(1609)와 동일한 다항식으로 로딩되고, 그리고 수신 의사-잡음 발생기(1659)는 송신 의사-잡음 발생기(1609)와 동일한 순간에 시작된다. 그렇지만, 수신 의사-잡음 발생기(1659)는 발생된 Rx PN 시퀀스가 결정된 수의 샘플만큼 Tx PN 시퀀스 뒤에 처지는 결과를 초래하는 다른 초기 조건으로 로딩된다. 유사하게, 수신 램프 발생기(1558)는 송신 램프 발생기(1608)와 동일한 목표 주파수 시프트 및 동일한 시프트 레이트로 프로그래밍되고 그리고 또한 송신 램프 발생기(1608)와 동기식으로 시작된다. 그렇지만, 수신 램프 발생기(1558)는 Rx측 상의 램프가 Tx 램프 뒤에 처지게 하는 다른 초기 조건으로 프로그래밍된다. 수신 램프 발생기(1558)는 수신 회전 계수를 발생시키도록 수신 DSS(1656)를 구동한다. Rx PN 시퀀스 및 수신 디지털 신호 프로세서(1557)의 출력 양자는 Rx 샘플을 프로세싱하는데 사용된다. Tx 샘플에 비해 Rx PN과 램프 샘플 간 지연에 대한 이유는 반사 레이더 신호의 왕복 지연을 감안하는 것이다. 일 구현에서, 발생기는 10의 초당 백만 칩(10MCPS)의 레이트로 실행된다. 모바일이 외부 신호 개조 없이 신호를 발생도 그리고 검출도 하고 그리하여 현재 조건에 기반하여 필요한 무엇이라도 그것이 Tx로부터 Rx까지 자기-모순이 없는 한 사용할 수 있으므로, 모바일은 이러한 레이트를 마음대로 변화시킬 수 있음을 주목하는 것이 중요하다.
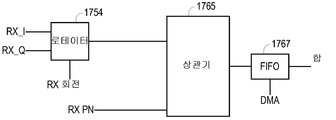
도 17은 현재 개시된 실시형태에 따른 수신 측위 신호 프로세싱의 기능적 블록 선도이다. 도 17의 블록은, 예컨대, 도 15의 수신 디지털 신호 프로세서(1557)에서 사용될 수 있다. 수신 측위 신호 프로세싱은 샘플 로테이터(1754), I 및 Q 상관기(1765)의 뱅크, 및 FIFO(1767)를 포함한다. Rx RF 샘플은 대응하는 송신 신호를 발생시키는데 사용된 값에 따라 샘플 로테이터(1754)에 의해 우선 회전된다. 예컨대, 도 16의 송신 측위 신호 프로세싱과 사용될 때, 샘플 로테이터(1754)는 수신 DSS(1656)로부터 회전 값을 수신할 수 있다.
그 후, 회전된 샘플은 Rx PN 시퀀스와 상관하도록 상관기(1765)에 공급된다. 상관기 및 그들 대응하는 로테이터는 다수의 반사기 에코를 찾도록 송신 디지털 신호 프로세서에서 발생된 정보를 사용할 수 있다. 도 16의 송신 측위 신호 프로세싱과 사용될 때, Rx PN 시퀀스는 수신 의사-잡음 발생기(1659)에 의해 공급될 수 있다. 일례의 구현에서는, 32 I 및 32 Q 상관기들이 있다. 상관기 쌍의 각각은 들어오는 Rx 샘플을 Rx PN 시퀀스의 시프트된 사본과 상관시킨다. 각각의 PN 시퀀스 사이클에서, 상관기의 적분 결과는, 예컨대, 직접 메모리 액세스(DMA) 메커니즘을 사용하여 FIFO(1767)를 통해 주 프로세서에 덤프된다. 상관기 합에서의 큰 값은 그 상관기에 의해 사용된 PN 오프셋에서의 반사기 신호를 표시하고 레인지 측정에 대응한다. 또한, 동일한 PN 및 로테이터 값을 사용하는 I와 Q 경로 상관기들 간 상대 크기는 Q/I의 아크탄젠트를 컴퓨팅함으로써 이러한 에코의 반송파 위상을 내놓는다. 더 미세한 시간 분해능을 얻기 위해, Rx 샘플의 샘플 레이트는 PN 칩핑 레이트의 배수로 유지될 수 있다. 일 실시형태에서는, Tx PN 칩핑 레이트보다 8배 더 높은 Rx 샘플 레이트가 사용된다. 10MCPS PN 레이트를 사용하는 일례의 구현에 대해, Rx RF 신호는 80MSPS에서 샘플링 및 프로세싱된다.
주기적으로, 주 프로세서는 상관기(1765)의 결과를 얻는다. 프로세서는 이들 상관기 합 중 피크(최대)를 찾는다.  의 발표된 값은 대응하는 왕복 시간 슬롯에서 에코의 존재를 표시한다. 그 후, 프로세서는 이러한 발표된 에코의 반송파 위상을 컴퓨팅하고 그리고 이러한 반송파 위상이 일어난 주파수 시프트를 알아챈다. 여러 상관기 덤프를 프로세싱한 후에, 프로세서는 각각의 식별된 에코에 대해 반송파 위상 대 위상이 관찰된 시프트 주파수의 테이블을 구축할 수 있다.
의 발표된 값은 대응하는 왕복 시간 슬롯에서 에코의 존재를 표시한다. 그 후, 프로세서는 이러한 발표된 에코의 반송파 위상을 컴퓨팅하고 그리고 이러한 반송파 위상이 일어난 주파수 시프트를 알아챈다. 여러 상관기 덤프를 프로세싱한 후에, 프로세서는 각각의 식별된 에코에 대해 반송파 위상 대 위상이 관찰된 시프트 주파수의 테이블을 구축할 수 있다.
소정 식별된 에코에 대해, 다음의 프로세싱이 수행될 수 있다. 송신 레이더 신호가 중심 주파수  에서 시작하고
에서 시작하고  으로 스윕한다고 가정하면, 식별된 에코에 대한 반송파 위상 대 시프트 주파수 테이블로부터, 프로세싱은
으로 스윕한다고 가정하면, 식별된 에코에 대한 반송파 위상 대 시프트 주파수 테이블로부터, 프로세싱은  로부터
로부터  까지 스윕하는 동안 에코가 경험한 총 위상 시프트를 측정할 수 있다. 완전 사이클 시프트를 카운트하는 것을 포함하여 총 위상 시프트를 추적하기 위해 단지 처음 값과 마지막 값 대신에 테이블 엔트리가 사용된다. 각각의 식별된 일차 에코는 DDR에 기인하여 다른 이차 에코를 가질 것이기 때문에, 반송파 사이클의 몇 분의 일까지 모바일과 반사기 간 자유 대기 레인지를 계산하기에 충분한 정보가 있다.
까지 스윕하는 동안 에코가 경험한 총 위상 시프트를 측정할 수 있다. 완전 사이클 시프트를 카운트하는 것을 포함하여 총 위상 시프트를 추적하기 위해 단지 처음 값과 마지막 값 대신에 테이블 엔트리가 사용된다. 각각의 식별된 일차 에코는 DDR에 기인하여 다른 이차 에코를 가질 것이기 때문에, 반송파 사이클의 몇 분의 일까지 모바일과 반사기 간 자유 대기 레인지를 계산하기에 충분한 정보가 있다.  로부터
로부터  까지 스윕하는 동안, 일차 에코가
까지 스윕하는 동안, 일차 에코가  반송파 사이클 슬립을 경험한다고 가정하고, 여기서
반송파 사이클 슬립을 경험한다고 가정하고, 여기서  는 정수가 아닐 수 있다. 또한, 이차 에코가
는 정수가 아닐 수 있다. 또한, 이차 에코가  반송파 사이클 슬립을 경험한다고 가정한다. 이것으로부터, Tx로부터 Rx까지 주파수
반송파 사이클 슬립을 경험한다고 가정한다. 이것으로부터, Tx로부터 Rx까지 주파수  에서의 총 왕복 반송파 사이클은 지연 소자에서의 사이클의 수,
에서의 총 왕복 반송파 사이클은 지연 소자에서의 사이클의 수,  , 더하기 자유 대기 왕복에서의 사이클의 수,
, 더하기 자유 대기 왕복에서의 사이클의 수, 와 같다. 이차 반사에 대해, 왕복 사이클 값은 자유 대기에서의 사이클의 수,
와 같다. 이차 반사에 대해, 왕복 사이클 값은 자유 대기에서의 사이클의 수,  , 더하기 2 곱하기 지연 소자 사이클,
, 더하기 2 곱하기 지연 소자 사이클,  과 같다.
과 같다.  이 반사기까지의 자유 대기 왕복이면,
이 반사기까지의 자유 대기 왕복이면,  이고, 여기서
이고, 여기서  는 중심 주파수
는 중심 주파수  에서의 반송파 파장이고
에서의 반송파 파장이고  는 대기에서의 광속이다. 또한,
는 대기에서의 광속이다. 또한,  . 사실상, 우리는
. 사실상, 우리는  또는
또는  을 알고 있지 않지만 우리는 소정
을 알고 있지 않지만 우리는 소정  내지
내지  스윕 동안 모바일에서 정확하게
스윕 동안 모바일에서 정확하게  및
및  를 측정할 수 있다. 다음을 주목한다,
를 측정할 수 있다. 다음을 주목한다,

위의 식으로부터, 위치결정 프로세스는  및 지연 소자의 지연을 계산할 수 있다. 반사기까지의 레인지
및 지연 소자의 지연을 계산할 수 있다. 반사기까지의 레인지  및 반사기 소자 지연은 산출된 에코가 유래한 반사기를 식별하는데 사용된다.
및 반사기 소자 지연은 산출된 에코가 유래한 반사기를 식별하는데 사용된다.
위 방법은 그것이 지연 소자 제조 및 환경 변형에 대한 레인지 측정의 어느 종속성이라도 제거하고 끊임없는 반사기 교정에 대한 필요성을 제거하므로 유용하다. 또한, 에코의 지연 소자 지연을 반송파 위상 레벨에서의 정확도로까지 결정하는 것은 검출된 반사 신호가 유래하는 대응하는 반사기를 식별하는데 도움을 준다. 2.4 GHz에서 동작하는 시스템에 대해, 각각의 반송파 사이클은 12cm에 걸쳐 이어진다. 이용가능한 SNR에 종속하여, 나노초 레벨에서의 그들 상이한 지연 소자 지연을 통해 구별되는 반사기를 식별하는 것은 물론 센티미터 레벨 레인지 정확도를 획득하는 것도 가능하게 된다. 이것은 동일한 부근 내 수백의 구별되는 반사기들 간 구별이 가능하다.
위의 것은 좁은 주파수 시프트가 반사기의 레인지 및 지연을 어떻게 측정할 수 있는지 개괄한다. 이러한 좁은 주파수 스윕을 수행하기 이전에, 넓은 주파수 스윕이 행해질 수 있다. 이러한 넓은 주파수 스윕은 주파수 스캐닝된 유형 반사기에 대해 최적 주파수를 검출하도록 설계된다. 최대 반사 주파수가 검출되고 나면, 그 지점 주위의 좁은 주파수 스윕은 레인지 및 지연을 측정하도록 수행된다. 이것은 띄엄띄엄한 수의 반사기를 갖는 장소에서만 행해질 수 있고 그리하여 AOA를 내놓는 주파수 스윕된 반사기의 사용은 가치 있게 된다. 3개보다 많은 반사기가 검출가능한 환경에서, AOA는 무시되어 넓은 주파수 스윕을 필요로 하지 않을 수 있다.
다중 사용자 환경을 지원하고 혼란스러운 반사를 감축하기 위해, 능동 전력 제어가 구현될 수 있다. 능동 전력 제어는 출력 Tx 전력을 조절하도록 수신 반사 측정 전력을 연속적으로 사용한다. 이것은 최소 RF 전력이 그 위치를 결정하도록 하나의 모바일에 의해 송신되는 결과를 초래한다. 부가적으로, 각각의 모바일에 대해 다른 또는 시간 시프트된 LFSR 다항식은 각각의 모바일이 그 자신의 발생된 레이더 신호에 의해 야기된 반사만을 검출함을 보증한다.
여기에서의 대부분의 설명은 모바일이 정지되어 있고(또는 거의 그렇고) 그리하여 도플러에 기인하는 Tx 대 Rx 주파수 시프트의 효과가 무시될 수 있다고 가정하였다. 이것은 위치 고정이 일 밀리초보다 적게 걸릴 수 있으므로 대다수의 실내 상황에 대해 참이다. 비현실적인 30 km/시 실내 속도에서라도, 2.4 GHz에서의 도플러는 밀리초당 25도보다 더 작다. 그렇지만, 위치결정 시스템은 소정 기간 동안 반송파 주파수를 고정(스윕하지 않음)하면서 사이클 슬립 레이트로부터 그것을 측정함으로써 도플러의 효과를 보정할 수 있다.
설치 프로세스의 개관이 이제 제공될 것이다. 설치 동안, (예컨대, 도 1의 서버(194)에서) 반사기 데이터가 업로드된다. 반사기 데이터는, 예컨대, 서버 데이터베이스에 추가 또는 변경하도록 특권을 부여받은 설치자에 의해 인터넷을 통해 업로드될 수 있다. 반사기 데이터는 여러 인터넷 접속된 컴퓨팅 디바이스 중 어느 것이라도 사용하여, 예컨대, 브라우저를 사용하여 업로드될 수 있다. 소정 구역에서 위치 반사기를 부착한 후에, 서버에 업로드될 반사기 데이터는 다양한 방식으로 획득될 수 있다. 정보는, 예컨대, 상업용 환경에서, 반사기마다 위치 및 정향을 결정하도록 정확한 건물 청사진 및 측량 장비로부터 획득될 수 있다. 또한, 소정 반사기에 특정적인 정보는 제조자 데이터 시트로부터 다운로드될 수 있다. 모든 이러한 정보는 수집되어 설치자에 의해 서버에 업로드될 수 있다.
대안으로 또는 부가적으로, 위치결정 능력을 갖는 모바일은 국부 좌표계에 관해 여러 이전에 측량된 지점에 위치하는 동안 위치 결정을 하도록 사용될 수 있다. 충분한 데이터 지점이 취해지면, 서버는 그들 측정된 대응하는 소자 지연과 함께 그것이 에코를 수신하는 각각의 반사기의 위치를 결정할 수 있다. 4개의 비-평면 지점만으로 기하학적으로는 모든 검출가능한 반사기에 충분하다.
반사기 및 모바일 위치의 기하구조를 방에 있는 물리적 벽 및 물체에 관련시키기 위해 다음의 방법론이 사용될 수 있다. 소프트웨어 패키지는 방의 여러 사진으로부터 방 내 물체를 포함하여 방의 3D 모델을 생성할 수 있다. 반사기를 측위하기 위한 측정 지점이 사진 중 일부 내에서 식별되면, 그때 방의 3D 맵은 반사기의 좌표계에 대한 고정된 관계를 갖고 그리하여 모바일의 이동은 방의 3D 모델 내에서 3D로 플롯팅될 수 있다. 이것은 애플리케이션 개발자가 여기에서 개시된 위치 시스템 및 방법에 따라 발생된 데이터를 사용하는데 큰 도움을 제공할 수 있다.
조합 설치 프로세스는 다음과 같이 동작한다. 반사기를 설치한 후에, 디지털 카메라를 위치결정 및 구비한 모바일은 방의 내부의 여러 사진을 찍게 된다. 사진이 스냅핑될 때마다, 모바일은 그것이 검출하는 모든 반사기에 대해 레인지 및 반사기 지연을 측정한다. 몇 지점 후에, 모바일은 모바일 및 서로에 상대적으로 반사기 위치를 측위할 수 있다. 이러한 정보는 방의 3D 모델이 구축되는 한편 동시에 설치된 반사기의 모델 좌표계 위에 놓이는 찍힌 사진에 의해 방의 3D 모델이 결정되는 동안 사용된다.
대안으로 또는 부가적으로, 반사기 데이터는, 예컨대, 주택에서, 이미징에 의해 획득될 수 있다. 모바일 애플리케이션 소프트웨어는 모바일을 직립으로 들고 모바일에서의 카메라로 방의 모든 벽을 스캐닝함으로써 3D 방 맵을 산출하도록 사용될 수 있다. 반사기를 측위하기 위해, 반사기의 각각은 재귀-반사성 광학 테이프로 덮인 구역을 가질 수 있다. 이러한 테이프는 카메라 플래시에 의해 조명되면 카메라에서 매우 밝게 나타난다. 그래서, 카메라로 방의 스캐닝 동안, 모바일의 플래시는 온으로 유지된다. 반사기가 프레임에 들어올 때마다, 광학 재귀-반사성 테이프는 카메라에서 매우 밝게 나타나고 반사기로서 식별되고 그리고 방 내에서의 그 위치가 알아채인다. 이러한 테이프는 주위 반사기 중 어느 것이 그것인지 모바일이 식별할 수 있도록 다양한 컬러 또는 컬러 스트라이프로 제작될 수 있다. 반사기 상의 바 코드는 모바일이 단순 바 코드 스캔으로부터 광학 테이프 컬러 및 반사기 RF 특성 전부를 얻을 수 있도록 선험적으로 스캐닝될 것이다. 방 기하구조, 각각의 반사기의 위치 및 정향, 및 반사기 특성에 대한 이러한 정보를 수집한 후에, 모바일 애플리케이션은 그 방 내에서의 그들 위치를 결정할 필요가 있는 다른 모바일에 이용가능하도록 이러한 정보를 서버에 업로드한다.
업로드 특권은 기원 장소에 기반하여 주어질 수 있다. 예컨대, 모바일이 소정 방 주위에서 서버에 반사기 정보를 업로드하려고 시도하고 있으면, 서버는 그것이 그 방 가까이에 물리적으로 존재하는 라우터로부터 유래한 경우에만 이러한 정보를 수락할 것이다. 패스워드는 또한 부가된 보안으로 프로비저닝될 수 있다. 위에서 언급된 바와 같이, 그 위치를 결정하는데 성공하는 어느 모바일이라도, 어떤 반사기 가정으로부터 그리고 어떤 정도의 신뢰도로, 그것이 결정한 위치를 서버에 익명으로 업로드할 수 있다. 서버는 위치 결정 모바일에 의해 끊임없이 업로드되고 있는 이러한 정보를 사용하여 그 상주 데이터베이스의 정확도를 계속적으로 개선 및 정제한다. 모바일은 가까운 옆 반사기로부터의 레이더 신호 반사를 검출 및 프로세싱함으로써 그 위치를 결정하도록 진행한다. 그것은 계산에서 앞서 언급된 바와 같이 서버에 업로드되어 있는 서버로부터 이용가능한 정보를 사용한다. 그 후, 그것은 다른 모바일에 의한 후속 위치 결정의 정확도를 개선하기 위해 결정된 위치를 그 실제 측량된 위치에 비교하고 서버 정보에 대한 보정을 업로드한다.
여기에서 설명된 실내 위치결정은 물리적 위치를 결정하기 위해 레이더 반사 신호의 검출에 의존한다. 레이더 반사를 검출하는 것은 CW 또는 LFM 유형 레이더 신호의 경우에 정합 필터를 사용함으로써 행해질 수 있다. 송신 레이더 신호가 DSSS 인코딩되는 경우에, RAKE 수신기는 약한 반사를 검출하도록 사용될 수 있다. 양 경우에서, 반사의 위상은, CW 또는 LFM의 경우에, 펄스 압축이든, 또는 PRN 디-스프레딩이든 수행된 후에 수신 신호 반송파 주파수 위상을 추적하는 다양한 기술을 통해 결정된다. 정수 반송파 모호성은, 짧은 듀레이션 펄싱, 또는 코히어런트 복조로 LFM 또는 DSSS 방법을 통해 대역폭을 증가시키는 것과 같은, 위에서 설명된 기술에 따라 분해된다. 코히어런트 프로세싱은 공통 송신 및 수신 주파수 참조가 사용되는 것에 기인하여 용이하게 이루어진다.
본 개시가 실내 환경 내에서 그 위치를 결정하는 모바일에 초점을 맞추고 있기는 하지만, 동일 또는 유사한 기술은 실외 환경 내에서 모바일의 위치를 결정하는데 사용될 수 있다. 이러한 유형의 실외 위치결정은, 예컨대, 좁은 거리 및 높은 건물이 GPS 신호 차단 및 다중경로에 기인하여 GPS 기반 위치 결정의 이용가능성 및 정확도를 감소시키는 "도시 협곡"에서 사용될 수 있다. 부가적으로, 개시된 위치결정 시스템 및 방법은 다수의 드론의 상대 위치를 결정하는 것을 포함하여 드론을 측위하도록 적응될 수 있다. 다양한 드론은 위치 반사기, 모바일 디바이스에 대해 설명된 바와 같은 위치결정, 또는 양자를 포함할 수 있다. 그러한 시스템은 충돌 회피에 사용될 수 있다.
개시된 위치결정은 모바일 디바이스에서 이미 찾아볼 수 있는 회로를 사용하여 모바일 디바이스에 의해 수행될 수 있다. 회로는 그들 원래 기능과 새로운 위치 측위 기능을 수행하는 것 간에 공유될 수 있다. 반사기와 사용될 수 있는 여러 레이더 신호 변조 및 매우 정확한 레인지 측정을 내놓도록 반송파 정수 모호성을 어떻게 분해하는지가 개시되었다. 일 실시형태에서의 모바일 아키텍처는 여기에서 설명된 파형 전부를 발생 및 프로세싱할 수 있고 그리고 레이더 파 변조 및 특성을 필요에 따라 온 더 플라이 개조하기에 충분히 융통성 있다. 마지막으로, 상업용은 물론 또한 주거용 환경에서 서버 정보가 어떻게 정제될 수 있는지 그리고 시스템이 어떻게 설치될 수 있는지가 개시되어 있다.
도 18은 현재 개시된 실시형태에 따라 위치 측위를 결정하기 위한 프로세스의 순서도이다. 특정 예를 제공하기 위해, 도 1의 시스템에서의 모바일 디바이스(185)에 의해 실행되는 바와 같은 프로세스가 설명될 것이다. 그렇지만, 프로세스는 어느 적합한 장치라도 사용하여 수행될 수 있다. 부가적으로, 많은 단계의 추가적 상세는 위에서 설명되어 있다.
모바일이 그 위치를 결정하기를 바랄 때, 단계(1802)에서, 그것은 그 마지막 위치를 검색하고 그리고 그 주위에 대한 환경 데이터를 수집한다. 단계(1803)에서, 마지막 위치 및 환경 데이터는 서버(194)에 보내진다. 단계(1804)에서, 모바일은 그 부근에서의 위치 반사기에 대한 반사기 데이터를, 서버로부터, 수신한다. 모바일은 또한 그것이 어떻게 위치결정을 수행하여야 하는지에 관한 정보, 예컨대, 송신 레이더 신호에 대한 시간 슬롯, RF 전력, 및 허용된 대역폭을 수신할 수 있다.
단계(1805)에서, 모바일은 그 위치 결정을 시작하도록 그것이 사용할 레이더 신호 특성을 결정한다. 예컨대, 모바일은 레이더 신호 변조 기법, 대역폭, 출력 전력, 칩핑 레이트, 및 타이밍을 결정할 수 있다. 이들 특성은 소망의 위치 정확도에 기반하여 결정될 수 있다.
단계(1806)에서, 모바일은, 예컨대, 도 16을 참조하여 설명된 바와 같이 송신 및 수신 LFSR 및 램프 발생기를 로딩 및 초기화할 수 있다. 단계(1807)에서, 모바일은 송신 및 수신 LFSR 및 램프 발생기를 시작하고 발생된 레이더 신호를 방사한다. 단계(1808)에서, 모바일은 단계(1807)의 송신에 응답하여 수신된 신호를 프로세싱한다. 예컨대, 프로세스는 상관 피크를 찾아 에코를 검출하고 그리고 또한 중심 주파수를 시프트하면서 사이클 슬립을 측정할 수 있다. 모바일은 그 후, 단계(1810)에서, 충분한 피크가 상관 데이터에서 발견되는지 결정한다. 이러한 결정은 소망의 위치 정확도에 그리고 어떤 이전 프로세싱이 수행되었는지에 기반할 수 있다. 충분한 피크가 발견되면, 프로세스는 단계(1817)로 계속한다. 충분한 피크가 발견되지 않으면, 프로세스는 단계(1811)로 계속하고 거기서 그것은 레이더 신호의 중심 주파수를 변화시키고 그 후 단계(1806)로 복귀한다. 충분한 피크가 발견되지 않고 그리고 프로세스가 소정 범위의 중심 주파수에 걸쳐 단계(1806-1810)를 반복하였으면, 프로세스는 단계(1812)로 계속한다. 단계(1812)에서, 프로세스는 송신 전력을 증가시키고 그 후 단계(1806)로 복귀한다.
단계(1817)에서, 프로세스는 상관 피크를 사용하여 반사기까지의 레인지를 컴퓨팅한다. 프로세스는 그 후 그 위치를 컴퓨팅할 수 있다. 단계(1818)에서, 프로세스는 그것이 주파수 스윕된 반사기를 검출하고 있는지 결정한다. 이러한 경우에, 프로세스는 단계(1819)로 계속하고 거기서 그것은 AOA를 결정하고 그 위치를 더 결정할 수 있다. 그렇지 않으면, 프로세스는 단계(1827)로 계속한다.
단계(1827)에서, 모바일은 그 위치를 결정하였다. 모바일은 결정된 위치 및 또한 검출된 반사기 지연을 서버에 보낼 수 있으며, 그것은 그 후 반사기 데이터의 그 데이터베이스를 업데이트할 수 있다. 그 후 프로세스는 단계(1829)로 계속하고 거기서 그것은 위치 업데이트가 소망될 때까지 남아 있는다. 이러한 이벤트에, 프로세스는 단계(1805)로 복귀한다.
도 18의 프로세스는 단계를 부가, 생략, 순서변경, 또는 개조함으로써 수정될 수 있다. 부가적으로, 단계들은 병행 수행될 수 있고 그리고 다른 단계 후에 일어나는 단계는 직후일 필요는 없다.
전술한 시스템 및 방법 및 연관된 디바이스 및 모듈은 여러 변형이 쉽게 가능하다. 부가적으로, 명확함과 간결함을 위해, 시스템 및 방법의 많은 설명이 단순화되었다. 예컨대, 도면들은 일반적으로는 각각의 유형의 디바이스를 하나 또는 수 개 예시하지만, 통신 시스템은 각각의 유형의 디바이스를 많이 가질 수 있다. 부가적으로, 다양한 실시형태의 특징들은 위에서 설명된 것들과는 다른 조합으로 조합될 수 있다.
본 명세서에서 설명된 바와 같이, 다양한 시스템 및 방법은 특정 파라미터, 기능, 또는 동작을 최적화하도록 작동하는 것으로 설명되고 있다. 용어 최적화의 이러한 사용은 반드시 추상적 이론적 또는 포괄적 의미에서의 최적화를 의미하지는 않는다. 그보다는, 시스템 및 방법은 적어도 많은 공통적 경우에서 성능을 개선할 것으로 예상되는 알고리즘을 사용하여 성능을 개선하도록 작동할 수 있다. 예컨대, 시스템 및 방법은 특정 기능 또는 기준에 의해 판정된 성능을 최적화하도록 작동할 수 있다. 최소화 또는 최대화 같은 유사한 용어는 유사한 방식으로 사용된다.
당업자는 여기에서 개시된 실시형태와 연관하여 설명된 다양한 예시적 로직 블록, 모듈, 유닛 및 알고리즘 단계가 흔히 전자적 하드웨어, 컴퓨터 소프트웨어, 또는 양자의 조합으로 구현될 수 있음을 인식할 것이다. 하드웨어와 소프트웨어의 이러한 호환가능성을 명확히 예시하기 위해, 다양한 예시적 컴포넌트, 블록, 모듈 및 단계가 일반적으로 그 기능성의 관점에서 위에 설명되었다. 그러한 기능성이 하드웨어로 구현될지 또는 소프트웨어로 구현될지는 전반적 시스템에 부과된 특정 제약에 의존한다. 당업자는 설명된 기능성을 각각의 특정 시스템에 대해 다양한 방식으로 구현할 수 있지만, 그러한 구현 결정은 본 발명의 범위로부터의 벗어남을 야기하는 것으로 해석되어서는 아니된다. 부가적으로, 유닛, 모듈, 블록 또는 단계 내 기능의 그룹화는 설명의 용이함을 위한 것이다. 특정 기능 또는 단계는 본 발명으로부터 벗어남이 없이 하나의 유닛, 모듈 또는 블록으로부터 이동될 수 있다.
여기에서 개시된 실시형태와 연관하여 설명된 다양한 예시적 로직 블록, 유닛, 단계 및 모듈은 범용 프로세서, 디지털 신호 프로세서(DSP), 주문형 반도체(ASIC), 필드 프로그래밍가능한 게이트 어레이(FPGA) 또는 다른 프로그래밍가능한 로직 디바이스와 같은 프로세서, 개별 게이트 또는 트랜지스터 로직, 개별 하드웨어 컴포넌트, 또는 여기에서 설명된 기능을 수행하도록 설계된 그 어느 조합으로라도 구현 또는 수행될 수 있다. 범용 프로세서는 마이크로프로세서일 수 있지만, 대안으로는, 프로세서는 어떠한 프로세서, 컨트롤러, 마이크로컨트롤러 또는 상태 머신이라도 될 수 있다. 프로세서는 또한 컴퓨팅 디바이스의 조합, 예컨대, DSP와 마이크로프로세서의 조합, 복수의 마이크로프로세서, DSP 코어와 함께 하나 이상의 마이크로프로세서, 또는 어느 다른 그러한 구성으로라도 구현될 수 있다. 더욱, 명령어를 실행하는 것에 부가하여, 프로세서는 일부 기능을 성취하기 위해 특수 목적 하드웨어를 포함할 수 있다.
여기에서 개시된 실시형태와 연관하여 설명된 어느 블록 또는 모듈의 프로세스 및 어느 방법 또는 알고리즘의 단계라도 직접 하드웨어로, 프로세서에 의해 실행되는 소프트웨어 모듈로, 또는 그 둘의 조합으로 구체화될 수 있다. 소프트웨어 모듈은 RAM 메모리, 플래시 메모리, ROM 메모리, EPROM 메모리, EEPROM 메모리, 레지스터, 하드 디스크, 착탈식 디스크, CD-ROM 또는 어느 다른 형태의 저장 매체에라도 거처할 수 있다. 일례의 저장 매체는 프로세서가 저장 매체에 정보를 기록하고 그로부터 정보를 판독할 수 있게 되도록 프로세서에 결합될 수 있다. 대안에 있어서, 저장 매체는 프로세서에 일체일 수 있다. 프로세서 및 저장 매체는 ASIC에 거처할 수 있다. 부가적으로, 결합된 것으로 설명되어 있는 디바이스, 블록 또는 모듈은 중개 디바이스, 블록 또는 모듈을 통하여 결합되어 있을 수 있다. 유사하게, 제1 디바이스는 제1 디바이스와 제2 디바이스를 결합하는 중개 디바이스가 존재할 때 그리고 또한 제1 디바이스가 데이터의 최종 목적지를 모르고 있을 때 데이터를 제2 디바이스에 송신(또는 그로부터 수신)한다고 설명되어 있을 수 있다.
개시된 실시형태의 위 설명은 당업자가 본 발명을 하거나 사용하는 것을 가능하게 하도록 제공된다. 이들 실시형태에 대한 다양한 수정이 당업자에게는 쉽게 명백할 것이고 여기에서 설명된 포괄적 원리는 본 발명의 취지 또는 범위로부터 벗어남이 없이 다른 실시형태에 적용될 수 있다. 그리하여, 여기에서 제시된 설명 및 도면은 본 발명의 특정 태양 및 실시형태를 표현하고 그래서 본 발명에 의해 광범위하게 고려되는 주제 사항의 대표적 예임을 이해하여야 한다. 더욱, 본 발명의 범위는 당업자에게 자명하거나 그렇게 될 수 있는 다른 실시형태를 완전히 망라하고 따라서 본 발명의 범위는 여기에서 제시된 설명에 의해 한정되지 않는다고 이해된다.
Claims (30)
- 위치결정 시스템(positioning system)으로서,
하나 이상의 위치 반사기(position reflector)로서, 상기 위치 반사기의 각각은 레이더 신호를 반사하도록 구성되고, 각각의 반사된 레이더 신호는 상기 위치 반사기의 내부 지연만큼 지연된 일차 반사를 포함하는 하나 이상의 상기 위치 반사기;
하나 이상의 상기 위치 반사기와 연관된 반사기 데이터를 저장하는 서버; 및
상기 서버로부터 상기 반사기 데이터를 수신하고 그리고 레이더 신호를 송신하고 송신된 레이더의 반사를 프로세싱하여 모바일 디바이스의 위치를 결정하도록 구성된 상기 모바일 디바이스를 포함하는, 위치결정 시스템. - 제1항에 있어서, 각각의 반사된 레이더 신호는 상기 위치 반사기의 상기 내부 지연의 정수배만큼 상기 일차 반사로부터 지연된 제2 반사를 더 포함하는, 위치결정 시스템.
- 제2항에 있어서, 상기 서버에 의해 저장된 상기 반사기 데이터는,
하나 이상의 상기 위치 반사기의 위치;
하나 이상의 상기 위치 반사기의 정향;
하나 이상의 상기 위치 반사기의 내부 지연;
하나 이상의 상기 위치 반사기의 일차 반사부터 이차 반사까지의 지연;
하나 이상의 상기 위치 반사기의 상기 일차 반사 및 상기 이차 반사의 전력 레벨; 및
하나 이상의 상기 위치 반사기의 주파수 특성을 포함하는, 위치결정 시스템. - 제1항에 있어서, 상기 서버는 상기 모바일 디바이스에 의해 송신된 상기 레이더 신호의 방사 전력, 대역폭, 듀레이션(duration), 및 중심 주파수를 제어하도록 구성되는, 위치결정 시스템.
- 제1항에 있어서, 하나 이상의 상기 위치 반사기 중 적어도 하나는,
안테나;
지연 소자; 및
상기 안테나를 상기 지연 소자에 결합시키는 정합 네트워크로서, 상기 안테나의 임피던스를 상기 지연 소자의 임피던스로 변환하는, 상기 정합 네트워크를 포함하는, 위치결정 시스템. - 제5항에 있어서, 상기 정합 네트워크는 상기 안테나의 상기 임피던스를 상기 지연 소자의 상기 임피던스에 부정합시키고 그로써 상기 위치 반사기로부터의 이차 반사를 야기하는, 위치결정 시스템.
- 제1항에 있어서, 하나 이상의 상기 위치 반사기 중 적어도 하나는,
안테나;
지연 소자;
상기 안테나에 결합하기 위한 제1 단자, 상기 지연 소자의 제1 단자에 결합된 제2 단자, 및 상기 지연 소자의 제2 단자에 결합된 제3 단자를 갖는 서큘레이터(circulator); 및
상기 안테나를 상기 서큘레이터에 결합시키는 정합 네트워크로서, 상기 안테나의 임피던스를 상기 지연 소자의 임피던스로 변환하는, 상기 정합 네트워크를 포함하는, 위치결정 시스템. - 제7항에 있어서, 상기 정합 네트워크는 상기 안테나의 상기 임피던스를 상기 지연 소자의 상기 임피던스에 부정합시킴으로써 상기 위치 반사기로부터의 이차 반사를 야기하는, 위치결정 시스템.
- 제1항에 있어서, 하나 이상의 상기 위치 반사기 중 적어도 하나는,
안테나의 어레이;
상기 어레이의 상기 안테나를 순차적으로 결합시키는 복수의 송신 경로;
지연 소자; 및
상기 복수의 송신 경로 중 제1 송신 경로를 상기 지연 소자에 결합시키는 정합 네트워크로서, 안테나의 상기 어레이의 임피던스를 상기 지연 소자의 임피던스로 변환하는, 상기 정합 네트워크를 포함하는, 위치결정 시스템. - 제9항에 있어서, 상기 정합 네트워크는 안테나의 상기 어레이의 상기 임피던스를 상기 지연 소자의 상기 임피던스에 부정합시키고 그로써 상기 위치 반사기로부터의 이차 반사를 야기하는, 위치결정 시스템.
- 제9항에 있어서, 위치 반사기로부터의 반사를 회절시키도록 배치된 확산 렌즈를 더 포함하는, 위치결정 시스템.
- 제1항에 있어서, 하나 이상의 상기 위치 반사기 중 적어도 하나는,
라디오-주파수 신호를 산출하는 국부 발진기; 및
반사기 소자의 어레이를 포함하고, 상기 반사기 소자의 각각은,
안테나,
지연 소자,
상기 안테나를 상기 지연 소자의 제1 포트에 결합시키는 정합 네트워크로서, 상기 안테나의 임피던스를 상기 지연 소자의 임피던스로 변환하는, 상기 정합 네트워크, 및
상기 지연 소자의 제2 포트에 결합되고 그리고 상기 지연 소자로부터의 신호를 상기 국부 발진기로부터의 상기 라디오-주파수 신호와 혼합하도록 구성된 반사기 혼합기를 포함하는, 위치결정 시스템. - 제12항에 있어서, 상기 반사기 혼합기는,
제1 입력과 제2 입력으로부터 혼합된 신호를 산출하도록 구성된 혼합기로서, 상기 제2 입력은 상기 국부 발진기로부터의 상기 라디오-주파수 신호에 결합된, 상기 혼합기; 및
상기 지연 소자의 상기 제2 포트에 결합된 제1 단자, 상기 혼합기의 상기 제1 입력에 결합된 제2 단자, 및 상기 혼합기로부터의 상기 혼합된 신호에 결합된 제3 단자를 갖는 서큘레이터를 포함하는, 위치결정 시스템. - 제12항에 있어서, 상기 라디오-주파수 신호가 상기 반사기 혼합기에서 혼합되기 전에 상기 위치 반사기를 식별시키는 데이터 시퀀스로 상기 라디오-주파수 신호를 변조하도록 구성된 위상 시프터를 더 포함하는, 위치결정 시스템.
- 제12항에 있어서, 상기 정합 네트워크는 상기 안테나의 상기 임피던스를 상기 지연 소자의 상기 임피던스에 부정합시키고 그로써 상기 위치 반사기로부터의 이차 반사를 야기하는, 위치결정 시스템.
- 제12항에 있어서, 상기 지연 소자는 디지털 지연 라인을 포함하는, 위치결정 시스템.
- 제1항에 있어서, 하나 이상의 상기 위치 반사기 중 적어도 하나는,
제1 각도에 민감한 레이더 신호를 반사하도록 배열된 제1 반사기; 및
상기 제1 각도에 직교하는 제2 각도에 민감한 레이더 신호를 반사하도록 배열된 제2 반사기를 포함하는, 위치결정 시스템. - 측위를 위한 디바이스로서,
하나 이상의 안테나에 결합된 라디오-주파수 전단부; 및
상기 라디오-주파수 전단부에 결합된 프로세서를 포함하되, 상기 프로세서는,
송신을 위해 상기 라디오-주파수 전단부에 레이더 신호를 공급하고,
하나 이상의 위치 반사기로부터 반사된 신호를, 상기 라디오-주파수 전단부로부터, 수신하고, 그리고
수신된 상기 신호를 프로세싱하여 디바이스 송신의 위치를 결정하도록 구성되고, 프로세싱하는 것은 일차 반사부터 이차 반사까지의 지연을 결정하는 것을 포함하는, 측위를 위한 디바이스. - 제18항에 있어서, 상기 라디오-주파수 전단부는 송신 체인 및 수신 체인을 포함하되,
상기 송신 체인은,
동상 및 직교 송신 신호를 디지털 형태로부터 아날로그 형태로 변환하기 위한 디지털-대-아날로그 변환기,
아날로그 동상 및 직교 송신 신호를 라디오 주파수로 변환하기 위한 상향-변환 혼합기,
송신 신호를 형성하도록 라디오-주파수 동상 및 직교 송신 신호를 결합하기 위한 합산기, 및
상기 송신 신호를 상기 하나 이상의 안테나에 공급하기 위한 증폭기 및 송신 대역-통과 필터를 포함하고;
상기 수신 체인은,
상기 하나 이상의 안테나로부터의 수신된 신호를 프로세싱하기 위한 증폭기 및 수신 대역-통과 필터,
프로세싱된 수신된 상기 신호를 동상 및 직교 수신 신호로 변환하기 위한 하향-변환 혼합기, 및
상기 동상 및 직교 수신 신호를 아날로그 형태로부터 디지털 형태로 변환하기 위한 아날로그-대-디지털 변환기를 포함하는, 측위를 위한 디바이스. - 제18항에 있어서, 송신을 위해 공급된 상기 레이더 신호는 직접 시퀀스 확산 스펙트럼(direct sequence spread spectrum: DSSS) 변조로 변조되는, 측위를 위한 디바이스.
- 제20항에 있어서, 상기 프로세서는 의사-잡음 발생기, 주파수 시프트 램프 발생기, 및 직접 디지털 합성기를 사용하여 상기 레이더 신호를 발생시키고, 그리고 상관기의 뱅크 및 수신 샘플 로테이터를 사용하여 수신된 상기 신호를 프로세싱하도록 더 구성되는, 측위를 위한 디바이스.
- 제18항에 있어서, 상기 레이더 신호의 중심 주파수는 시프트되고, 그리고 상기 프로세서는 다른 중심 주파수에 대응하는 수신된 상기 신호의 프로세싱에 기반하여 도래각 정보를 결정하도록 더 구성되는, 측위를 위한 디바이스.
- 제18항에 있어서, 상기 레이더 신호의 중심 주파수는 2개의 주파수 사이에서 스윕되고, 그리고 상기 프로세서는 상기 일차 반사 및 상기 이차 반사 양자에 대한 사이클 슬립을 카운트하도록 더 구성되는, 측위를 위한 디바이스.
- 제23항에 있어서, 상기 프로세서는 카운트된 상기 사이클 슬립을 이용하여 연관된 상기 위치 반사기의 내부 지연을 결정하도록 더 구성되는, 측위를 위한 디바이스.
- 제23항에 있어서, 상기 프로세서는 카운트된 상기 사이클 슬립을 이용하여 연관된 상기 위치 반사기까지의 레인지를 결정하도록 더 구성되되, 레인지는 상기 레이더 신호의 파장의 몇 분의 일까지 결정되는, 측위를 위한 디바이스.
- 제18항에 있어서, 상기 프로세서는 위치 반사기의 예상된 내부 지연에 기반하는 온 듀레이션 및 상기 이차 반사의 상기 지연에 기반하는 오프 듀레이션을 갖는 상기 레이더 신호를 공급하도록 더 구성되는, 측위를 위한 디바이스.
- 제18항에 있어서, 상기 프로세서는 상기 일차 반사부터 상기 이차 반사까지의 상기 지연을 이용하여 연관된 상기 반사기를 식별하도록 더 구성되는, 측위를 위한 디바이스.
- 제18항에 있어서, 상기 프로세서는 수신된 반사 상에서 위상 변조된 데이터 시퀀스를 디코딩하고 디코딩된 상기 데이터 시퀀스를 이용하여 연관된 상기 반사기를 식별하도록 더 구성되는, 측위를 위한 디바이스.
- 전자 디바이스의 측위를 위한 방법으로서,
직접 시퀀스 확산 스펙트럼 코딩된 레이더 신호를 송신하는 단계로서, 상기 레이더 신호는 2개의 주파수 사이에서 스윕된 중심 주파수를 갖는 상기 송신하는 단계;
복수의 위치 반사기로부터의 반사를 포함하는 레이더 신호를 수신하는 단계로서, 상기 반사의 각각은 대응하는 상기 위치 반사기의 내부 지연만큼 지연된 일차 반사 및 대응하는 상기 위치 반사기의 상기 내부 지연만큼 더 지연된 이차 반사를 포함하는 상기 수신하는 단계;
수신된 상기 레이더 신호에서 검출된 정보를 송신된 상기 레이더 신호를 형성하는데 사용된 대응하는 정보와 상관시켜 상기 반사에서 최대치를 결정하는 단계;
상기 반사에서 결정된 상기 최대치를 사용하여 상기 반사에 대한 지연 정보 및 주파수 정보를 검출하는 단계;
상기 지연 정보로부터 상기 위치 반사기의 상기 내부 지연에 대한 정보를 결정하는 단계;
결정된 상기 내부 지연 정보를 사용하여 상기 복수의 위치 반사기를 식별하는 단계;
검출된 상기 지연 정보 및 결정된 상기 내부 지연 정보를 사용하여 상기 복수의 위치 반사기 중 적어도 하나까지의 레인지를 결정하는 단계;
상기 주파수 정보를 사용하여 상기 복수의 위치 반사기 중 적어도 하나로부터의 상기 반사에 대한 도래각을 결정하는 단계; 및
상기 레인지 및 상기 도래각을 사용하여 상기 전자 디바이스의 위치를 결정하는 단계를 포함하는, 전자 디바이스의 측위를 위한 방법. - 제29항에 있어서,
방의 실내에 상기 복수의 위치 반사기를 부착하는 단계;
상기 복수의 위치 반사기로부터 반사를 수신하는 동안 상기 방의 상기 실내의 복수의 디지털 이미지를 취하는 단계;
수신된 상기 반사를 프로세싱하여 반사기 측정치를 산출하는 단계;
상기 방의 상기 실내의 모델을 구축하도록 상기 반사기 측정치와 상기 복수의 디지털 이미지를 결합하는 단계로서, 상기 모델은 반사기 데이터를 포함하고, 상기 반사기 데이터는 상기 복수의 위치 반사기의 위치를 포함하는 상기 결합하는 단계; 및
후속 측위에서 사용하기 위해 상기 반사기 데이터를 서버에 저장하는 단계를 더 포함하는, 전자 디바이스의 측위를 위한 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201462041569P | 2014-08-25 | 2014-08-25 | |
| US62/041,569 | 2014-08-25 | ||
| PCT/US2015/046800 WO2016033110A1 (en) | 2014-08-25 | 2015-08-25 | Indoor position location using delayed scanned directional reflectors |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170056570A true KR20170056570A (ko) | 2017-05-23 |
| KR102400669B1 KR102400669B1 (ko) | 2022-05-20 |
Family
ID=55348159
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177008232A KR102400669B1 (ko) | 2014-08-25 | 2015-08-25 | 지연된 스캐닝된 방향성 반사기를 사용한 실내 위치 측위 |
Country Status (9)
| Country | Link |
|---|---|
| US (2) | US9383441B2 (ko) |
| EP (1) | EP3186655B1 (ko) |
| JP (1) | JP2017529528A (ko) |
| KR (1) | KR102400669B1 (ko) |
| CN (1) | CN107076842B (ko) |
| AU (1) | AU2015306699A1 (ko) |
| BR (1) | BR112017003997A2 (ko) |
| FI (1) | FI3186655T3 (ko) |
| WO (1) | WO2016033110A1 (ko) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020096365A1 (en) * | 2018-11-07 | 2020-05-14 | Samsung Electronics Co., Ltd. | Motion assisted leakage removal for radar applications |
| KR20200069994A (ko) | 2018-12-08 | 2020-06-17 | 오승민 | 받침대로 사용 가능한 아이스컵 홀더 |
| WO2022025484A1 (ko) * | 2020-07-31 | 2022-02-03 | 국방과학연구소 | 양자 레이더의 목표물 검출을 위한 제곱 호모다인 측정 이용 양자 수신기 및 그 측정 방법 |
Families Citing this family (246)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130095747A1 (en) | 2011-10-17 | 2013-04-18 | Mehran Moshfeghi | Method and system for a repeater network that utilizes distributed transceivers with array processing |
| US9941747B2 (en) | 2014-07-14 | 2018-04-10 | Energous Corporation | System and method for manually selecting and deselecting devices to charge in a wireless power network |
| US9806564B2 (en) | 2014-05-07 | 2017-10-31 | Energous Corporation | Integrated rectifier and boost converter for wireless power transmission |
| US9787103B1 (en) | 2013-08-06 | 2017-10-10 | Energous Corporation | Systems and methods for wirelessly delivering power to electronic devices that are unable to communicate with a transmitter |
| US10243414B1 (en) | 2014-05-07 | 2019-03-26 | Energous Corporation | Wearable device with wireless power and payload receiver |
| US10075008B1 (en) | 2014-07-14 | 2018-09-11 | Energous Corporation | Systems and methods for manually adjusting when receiving electronic devices are scheduled to receive wirelessly delivered power from a wireless power transmitter in a wireless power network |
| US9252628B2 (en) | 2013-05-10 | 2016-02-02 | Energous Corporation | Laptop computer as a transmitter for wireless charging |
| US10439448B2 (en) | 2014-08-21 | 2019-10-08 | Energous Corporation | Systems and methods for automatically testing the communication between wireless power transmitter and wireless power receiver |
| US9867062B1 (en) | 2014-07-21 | 2018-01-09 | Energous Corporation | System and methods for using a remote server to authorize a receiving device that has requested wireless power and to determine whether another receiving device should request wireless power in a wireless power transmission system |
| US9793758B2 (en) | 2014-05-23 | 2017-10-17 | Energous Corporation | Enhanced transmitter using frequency control for wireless power transmission |
| US9923386B1 (en) | 2012-07-06 | 2018-03-20 | Energous Corporation | Systems and methods for wireless power transmission by modifying a number of antenna elements used to transmit power waves to a receiver |
| US9824815B2 (en) | 2013-05-10 | 2017-11-21 | Energous Corporation | Wireless charging and powering of healthcare gadgets and sensors |
| US9887584B1 (en) | 2014-08-21 | 2018-02-06 | Energous Corporation | Systems and methods for a configuration web service to provide configuration of a wireless power transmitter within a wireless power transmission system |
| US10063106B2 (en) | 2014-05-23 | 2018-08-28 | Energous Corporation | System and method for a self-system analysis in a wireless power transmission network |
| US10103582B2 (en) | 2012-07-06 | 2018-10-16 | Energous Corporation | Transmitters for wireless power transmission |
| US9912199B2 (en) | 2012-07-06 | 2018-03-06 | Energous Corporation | Receivers for wireless power transmission |
| US10218227B2 (en) | 2014-05-07 | 2019-02-26 | Energous Corporation | Compact PIFA antenna |
| US10063064B1 (en) | 2014-05-23 | 2018-08-28 | Energous Corporation | System and method for generating a power receiver identifier in a wireless power network |
| US9825674B1 (en) | 2014-05-23 | 2017-11-21 | Energous Corporation | Enhanced transmitter that selects configurations of antenna elements for performing wireless power transmission and receiving functions |
| US10141791B2 (en) | 2014-05-07 | 2018-11-27 | Energous Corporation | Systems and methods for controlling communications during wireless transmission of power using application programming interfaces |
| US9876379B1 (en) | 2013-07-11 | 2018-01-23 | Energous Corporation | Wireless charging and powering of electronic devices in a vehicle |
| US9893768B2 (en) | 2012-07-06 | 2018-02-13 | Energous Corporation | Methodology for multiple pocket-forming |
| US9859757B1 (en) | 2013-07-25 | 2018-01-02 | Energous Corporation | Antenna tile arrangements in electronic device enclosures |
| US10090886B1 (en) | 2014-07-14 | 2018-10-02 | Energous Corporation | System and method for enabling automatic charging schedules in a wireless power network to one or more devices |
| US10193396B1 (en) | 2014-05-07 | 2019-01-29 | Energous Corporation | Cluster management of transmitters in a wireless power transmission system |
| US9966765B1 (en) | 2013-06-25 | 2018-05-08 | Energous Corporation | Multi-mode transmitter |
| US10038337B1 (en) | 2013-09-16 | 2018-07-31 | Energous Corporation | Wireless power supply for rescue devices |
| US9941707B1 (en) | 2013-07-19 | 2018-04-10 | Energous Corporation | Home base station for multiple room coverage with multiple transmitters |
| US10211682B2 (en) | 2014-05-07 | 2019-02-19 | Energous Corporation | Systems and methods for controlling operation of a transmitter of a wireless power network based on user instructions received from an authenticated computing device powered or charged by a receiver of the wireless power network |
| US10050462B1 (en) | 2013-08-06 | 2018-08-14 | Energous Corporation | Social power sharing for mobile devices based on pocket-forming |
| US9893554B2 (en) | 2014-07-14 | 2018-02-13 | Energous Corporation | System and method for providing health safety in a wireless power transmission system |
| US9853458B1 (en) | 2014-05-07 | 2017-12-26 | Energous Corporation | Systems and methods for device and power receiver pairing |
| US10063105B2 (en) | 2013-07-11 | 2018-08-28 | Energous Corporation | Proximity transmitters for wireless power charging systems |
| US9368020B1 (en) | 2013-05-10 | 2016-06-14 | Energous Corporation | Off-premises alert system and method for wireless power receivers in a wireless power network |
| US9843213B2 (en) | 2013-08-06 | 2017-12-12 | Energous Corporation | Social power sharing for mobile devices based on pocket-forming |
| US10141768B2 (en) | 2013-06-03 | 2018-11-27 | Energous Corporation | Systems and methods for maximizing wireless power transfer efficiency by instructing a user to change a receiver device's position |
| US9812890B1 (en) | 2013-07-11 | 2017-11-07 | Energous Corporation | Portable wireless charging pad |
| US10291055B1 (en) | 2014-12-29 | 2019-05-14 | Energous Corporation | Systems and methods for controlling far-field wireless power transmission based on battery power levels of a receiving device |
| US9941754B2 (en) | 2012-07-06 | 2018-04-10 | Energous Corporation | Wireless power transmission with selective range |
| US9843201B1 (en) | 2012-07-06 | 2017-12-12 | Energous Corporation | Wireless power transmitter that selects antenna sets for transmitting wireless power to a receiver based on location of the receiver, and methods of use thereof |
| US9871398B1 (en) | 2013-07-01 | 2018-01-16 | Energous Corporation | Hybrid charging method for wireless power transmission based on pocket-forming |
| US9438045B1 (en) | 2013-05-10 | 2016-09-06 | Energous Corporation | Methods and systems for maximum power point transfer in receivers |
| US9893555B1 (en) | 2013-10-10 | 2018-02-13 | Energous Corporation | Wireless charging of tools using a toolbox transmitter |
| US10256657B2 (en) | 2015-12-24 | 2019-04-09 | Energous Corporation | Antenna having coaxial structure for near field wireless power charging |
| US9973021B2 (en) | 2012-07-06 | 2018-05-15 | Energous Corporation | Receivers for wireless power transmission |
| US10381880B2 (en) | 2014-07-21 | 2019-08-13 | Energous Corporation | Integrated antenna structure arrays for wireless power transmission |
| US10992185B2 (en) | 2012-07-06 | 2021-04-27 | Energous Corporation | Systems and methods of using electromagnetic waves to wirelessly deliver power to game controllers |
| US10199849B1 (en) | 2014-08-21 | 2019-02-05 | Energous Corporation | Method for automatically testing the operational status of a wireless power receiver in a wireless power transmission system |
| US10263432B1 (en) | 2013-06-25 | 2019-04-16 | Energous Corporation | Multi-mode transmitter with an antenna array for delivering wireless power and providing Wi-Fi access |
| US10312715B2 (en) | 2015-09-16 | 2019-06-04 | Energous Corporation | Systems and methods for wireless power charging |
| US9891669B2 (en) | 2014-08-21 | 2018-02-13 | Energous Corporation | Systems and methods for a configuration web service to provide configuration of a wireless power transmitter within a wireless power transmission system |
| US10223717B1 (en) | 2014-05-23 | 2019-03-05 | Energous Corporation | Systems and methods for payment-based authorization of wireless power transmission service |
| US20140008993A1 (en) | 2012-07-06 | 2014-01-09 | DvineWave Inc. | Methodology for pocket-forming |
| US9838083B2 (en) | 2014-07-21 | 2017-12-05 | Energous Corporation | Systems and methods for communication with remote management systems |
| US9906065B2 (en) | 2012-07-06 | 2018-02-27 | Energous Corporation | Systems and methods of transmitting power transmission waves based on signals received at first and second subsets of a transmitter's antenna array |
| US10205239B1 (en) | 2014-05-07 | 2019-02-12 | Energous Corporation | Compact PIFA antenna |
| US9847677B1 (en) | 2013-10-10 | 2017-12-19 | Energous Corporation | Wireless charging and powering of healthcare gadgets and sensors |
| US9882427B2 (en) | 2013-05-10 | 2018-01-30 | Energous Corporation | Wireless power delivery using a base station to control operations of a plurality of wireless power transmitters |
| US9143000B2 (en) | 2012-07-06 | 2015-09-22 | Energous Corporation | Portable wireless charging pad |
| US20150326070A1 (en) | 2014-05-07 | 2015-11-12 | Energous Corporation | Methods and Systems for Maximum Power Point Transfer in Receivers |
| US9859797B1 (en) | 2014-05-07 | 2018-01-02 | Energous Corporation | Synchronous rectifier design for wireless power receiver |
| US10224982B1 (en) | 2013-07-11 | 2019-03-05 | Energous Corporation | Wireless power transmitters for transmitting wireless power and tracking whether wireless power receivers are within authorized locations |
| US10224758B2 (en) | 2013-05-10 | 2019-03-05 | Energous Corporation | Wireless powering of electronic devices with selective delivery range |
| US9124125B2 (en) | 2013-05-10 | 2015-09-01 | Energous Corporation | Wireless power transmission with selective range |
| US9991741B1 (en) | 2014-07-14 | 2018-06-05 | Energous Corporation | System for tracking and reporting status and usage information in a wireless power management system |
| US10211680B2 (en) | 2013-07-19 | 2019-02-19 | Energous Corporation | Method for 3 dimensional pocket-forming |
| US9876394B1 (en) | 2014-05-07 | 2018-01-23 | Energous Corporation | Boost-charger-boost system for enhanced power delivery |
| US10291066B1 (en) | 2014-05-07 | 2019-05-14 | Energous Corporation | Power transmission control systems and methods |
| US10124754B1 (en) | 2013-07-19 | 2018-11-13 | Energous Corporation | Wireless charging and powering of electronic sensors in a vehicle |
| US10090699B1 (en) | 2013-11-01 | 2018-10-02 | Energous Corporation | Wireless powered house |
| US10199835B2 (en) | 2015-12-29 | 2019-02-05 | Energous Corporation | Radar motion detection using stepped frequency in wireless power transmission system |
| US9847679B2 (en) | 2014-05-07 | 2017-12-19 | Energous Corporation | System and method for controlling communication between wireless power transmitter managers |
| US10965164B2 (en) | 2012-07-06 | 2021-03-30 | Energous Corporation | Systems and methods of wirelessly delivering power to a receiver device |
| US9831718B2 (en) | 2013-07-25 | 2017-11-28 | Energous Corporation | TV with integrated wireless power transmitter |
| US10230266B1 (en) | 2014-02-06 | 2019-03-12 | Energous Corporation | Wireless power receivers that communicate status data indicating wireless power transmission effectiveness with a transmitter using a built-in communications component of a mobile device, and methods of use thereof |
| US9948135B2 (en) | 2015-09-22 | 2018-04-17 | Energous Corporation | Systems and methods for identifying sensitive objects in a wireless charging transmission field |
| US9859756B2 (en) | 2012-07-06 | 2018-01-02 | Energous Corporation | Transmittersand methods for adjusting wireless power transmission based on information from receivers |
| US10128693B2 (en) | 2014-07-14 | 2018-11-13 | Energous Corporation | System and method for providing health safety in a wireless power transmission system |
| US9853692B1 (en) | 2014-05-23 | 2017-12-26 | Energous Corporation | Systems and methods for wireless power transmission |
| US10008889B2 (en) | 2014-08-21 | 2018-06-26 | Energous Corporation | Method for automatically testing the operational status of a wireless power receiver in a wireless power transmission system |
| US10206185B2 (en) | 2013-05-10 | 2019-02-12 | Energous Corporation | System and methods for wireless power transmission to an electronic device in accordance with user-defined restrictions |
| US9887739B2 (en) | 2012-07-06 | 2018-02-06 | Energous Corporation | Systems and methods for wireless power transmission by comparing voltage levels associated with power waves transmitted by antennas of a plurality of antennas of a transmitter to determine appropriate phase adjustments for the power waves |
| US10186913B2 (en) | 2012-07-06 | 2019-01-22 | Energous Corporation | System and methods for pocket-forming based on constructive and destructive interferences to power one or more wireless power receivers using a wireless power transmitter including a plurality of antennas |
| US10148097B1 (en) | 2013-11-08 | 2018-12-04 | Energous Corporation | Systems and methods for using a predetermined number of communication channels of a wireless power transmitter to communicate with different wireless power receivers |
| US10270261B2 (en) | 2015-09-16 | 2019-04-23 | Energous Corporation | Systems and methods of object detection in wireless power charging systems |
| US9939864B1 (en) | 2014-08-21 | 2018-04-10 | Energous Corporation | System and method to control a wireless power transmission system by configuration of wireless power transmission control parameters |
| US10992187B2 (en) | 2012-07-06 | 2021-04-27 | Energous Corporation | System and methods of using electromagnetic waves to wirelessly deliver power to electronic devices |
| US9954374B1 (en) | 2014-05-23 | 2018-04-24 | Energous Corporation | System and method for self-system analysis for detecting a fault in a wireless power transmission Network |
| US9899873B2 (en) | 2014-05-23 | 2018-02-20 | Energous Corporation | System and method for generating a power receiver identifier in a wireless power network |
| US10211674B1 (en) * | 2013-06-12 | 2019-02-19 | Energous Corporation | Wireless charging using selected reflectors |
| US9876648B2 (en) | 2014-08-21 | 2018-01-23 | Energous Corporation | System and method to control a wireless power transmission system by configuration of wireless power transmission control parameters |
| US11502551B2 (en) | 2012-07-06 | 2022-11-15 | Energous Corporation | Wirelessly charging multiple wireless-power receivers using different subsets of an antenna array to focus energy at different locations |
| US10128699B2 (en) | 2014-07-14 | 2018-11-13 | Energous Corporation | Systems and methods of providing wireless power using receiver device sensor inputs |
| US9899861B1 (en) | 2013-10-10 | 2018-02-20 | Energous Corporation | Wireless charging methods and systems for game controllers, based on pocket-forming |
| US9900057B2 (en) | 2012-07-06 | 2018-02-20 | Energous Corporation | Systems and methods for assigning groups of antenas of a wireless power transmitter to different wireless power receivers, and determining effective phases to use for wirelessly transmitting power using the assigned groups of antennas |
| US9882430B1 (en) | 2014-05-07 | 2018-01-30 | Energous Corporation | Cluster management of transmitters in a wireless power transmission system |
| US9548805B2 (en) | 2012-08-08 | 2017-01-17 | Golba Llc | Method and system for optimizing communication in leaky wave distributed transceiver environments |
| US9419443B2 (en) | 2013-05-10 | 2016-08-16 | Energous Corporation | Transducer sound arrangement for pocket-forming |
| US9819230B2 (en) | 2014-05-07 | 2017-11-14 | Energous Corporation | Enhanced receiver for wireless power transmission |
| US9866279B2 (en) | 2013-05-10 | 2018-01-09 | Energous Corporation | Systems and methods for selecting which power transmitter should deliver wireless power to a receiving device in a wireless power delivery network |
| US9538382B2 (en) | 2013-05-10 | 2017-01-03 | Energous Corporation | System and method for smart registration of wireless power receivers in a wireless power network |
| US9537357B2 (en) | 2013-05-10 | 2017-01-03 | Energous Corporation | Wireless sound charging methods and systems for game controllers, based on pocket-forming |
| US10103552B1 (en) | 2013-06-03 | 2018-10-16 | Energous Corporation | Protocols for authenticated wireless power transmission |
| US10003211B1 (en) | 2013-06-17 | 2018-06-19 | Energous Corporation | Battery life of portable electronic devices |
| US10021523B2 (en) | 2013-07-11 | 2018-07-10 | Energous Corporation | Proximity transmitters for wireless power charging systems |
| US9979440B1 (en) | 2013-07-25 | 2018-05-22 | Energous Corporation | Antenna tile arrangements configured to operate as one functional unit |
| EP3090478A4 (en) * | 2014-01-01 | 2017-09-13 | Powermat Technologies Ltd. | Method and system for managing wireless power transfer for electrical devices |
| US10075017B2 (en) | 2014-02-06 | 2018-09-11 | Energous Corporation | External or internal wireless power receiver with spaced-apart antenna elements for charging or powering mobile devices using wirelessly delivered power |
| US9935482B1 (en) | 2014-02-06 | 2018-04-03 | Energous Corporation | Wireless power transmitters that transmit at determined times based on power availability and consumption at a receiving mobile device |
| US9966784B2 (en) | 2014-06-03 | 2018-05-08 | Energous Corporation | Systems and methods for extending battery life of portable electronic devices charged by sound |
| US10158257B2 (en) | 2014-05-01 | 2018-12-18 | Energous Corporation | System and methods for using sound waves to wirelessly deliver power to electronic devices |
| US9973008B1 (en) | 2014-05-07 | 2018-05-15 | Energous Corporation | Wireless power receiver with boost converters directly coupled to a storage element |
| US10153653B1 (en) | 2014-05-07 | 2018-12-11 | Energous Corporation | Systems and methods for using application programming interfaces to control communications between a transmitter and a receiver |
| US10170917B1 (en) | 2014-05-07 | 2019-01-01 | Energous Corporation | Systems and methods for managing and controlling a wireless power network by establishing time intervals during which receivers communicate with a transmitter |
| US10153645B1 (en) | 2014-05-07 | 2018-12-11 | Energous Corporation | Systems and methods for designating a master power transmitter in a cluster of wireless power transmitters |
| US9800172B1 (en) | 2014-05-07 | 2017-10-24 | Energous Corporation | Integrated rectifier and boost converter for boosting voltage received from wireless power transmission waves |
| US9876536B1 (en) | 2014-05-23 | 2018-01-23 | Energous Corporation | Systems and methods for assigning groups of antennas to transmit wireless power to different wireless power receivers |
| US10068703B1 (en) | 2014-07-21 | 2018-09-04 | Energous Corporation | Integrated miniature PIFA with artificial magnetic conductor metamaterials |
| US9871301B2 (en) | 2014-07-21 | 2018-01-16 | Energous Corporation | Integrated miniature PIFA with artificial magnetic conductor metamaterials |
| US10116143B1 (en) | 2014-07-21 | 2018-10-30 | Energous Corporation | Integrated antenna arrays for wireless power transmission |
| US9917477B1 (en) | 2014-08-21 | 2018-03-13 | Energous Corporation | Systems and methods for automatically testing the communication between power transmitter and wireless receiver |
| US9965009B1 (en) | 2014-08-21 | 2018-05-08 | Energous Corporation | Systems and methods for assigning a power receiver to individual power transmitters based on location of the power receiver |
| CN107078711A (zh) * | 2014-10-14 | 2017-08-18 | 华为技术有限公司 | 全双工系统中抑制泄漏的系统和方法 |
| US10122415B2 (en) | 2014-12-27 | 2018-11-06 | Energous Corporation | Systems and methods for assigning a set of antennas of a wireless power transmitter to a wireless power receiver based on a location of the wireless power receiver |
| US9893535B2 (en) | 2015-02-13 | 2018-02-13 | Energous Corporation | Systems and methods for determining optimal charging positions to maximize efficiency of power received from wirelessly delivered sound wave energy |
| US9531428B2 (en) * | 2015-03-03 | 2016-12-27 | Mediatek Inc. | Wireless communication calibration system and associated method |
| KR101711275B1 (ko) * | 2015-04-23 | 2017-03-02 | 임동권 | 위치 정보 제공 장치 및 노드 네트워크 |
| US9681267B2 (en) * | 2015-06-24 | 2017-06-13 | Apple Inc. | Positioning techniques for narrowband wireless signals under dense multipath conditions |
| US10523033B2 (en) | 2015-09-15 | 2019-12-31 | Energous Corporation | Receiver devices configured to determine location within a transmission field |
| US9906275B2 (en) | 2015-09-15 | 2018-02-27 | Energous Corporation | Identifying receivers in a wireless charging transmission field |
| US10199850B2 (en) | 2015-09-16 | 2019-02-05 | Energous Corporation | Systems and methods for wirelessly transmitting power from a transmitter to a receiver by determining refined locations of the receiver in a segmented transmission field associated with the transmitter |
| US9941752B2 (en) | 2015-09-16 | 2018-04-10 | Energous Corporation | Systems and methods of object detection in wireless power charging systems |
| US10211685B2 (en) | 2015-09-16 | 2019-02-19 | Energous Corporation | Systems and methods for real or near real time wireless communications between a wireless power transmitter and a wireless power receiver |
| US10778041B2 (en) | 2015-09-16 | 2020-09-15 | Energous Corporation | Systems and methods for generating power waves in a wireless power transmission system |
| US9893538B1 (en) | 2015-09-16 | 2018-02-13 | Energous Corporation | Systems and methods of object detection in wireless power charging systems |
| US10158259B1 (en) | 2015-09-16 | 2018-12-18 | Energous Corporation | Systems and methods for identifying receivers in a transmission field by transmitting exploratory power waves towards different segments of a transmission field |
| US9871387B1 (en) | 2015-09-16 | 2018-01-16 | Energous Corporation | Systems and methods of object detection using one or more video cameras in wireless power charging systems |
| US10008875B1 (en) | 2015-09-16 | 2018-06-26 | Energous Corporation | Wireless power transmitter configured to transmit power waves to a predicted location of a moving wireless power receiver |
| US11710321B2 (en) | 2015-09-16 | 2023-07-25 | Energous Corporation | Systems and methods of object detection in wireless power charging systems |
| US10186893B2 (en) | 2015-09-16 | 2019-01-22 | Energous Corporation | Systems and methods for real time or near real time wireless communications between a wireless power transmitter and a wireless power receiver |
| US10153660B1 (en) | 2015-09-22 | 2018-12-11 | Energous Corporation | Systems and methods for preconfiguring sensor data for wireless charging systems |
| US10027168B2 (en) | 2015-09-22 | 2018-07-17 | Energous Corporation | Systems and methods for generating and transmitting wireless power transmission waves using antennas having a spacing that is selected by the transmitter |
| US10135295B2 (en) | 2015-09-22 | 2018-11-20 | Energous Corporation | Systems and methods for nullifying energy levels for wireless power transmission waves |
| US10128686B1 (en) | 2015-09-22 | 2018-11-13 | Energous Corporation | Systems and methods for identifying receiver locations using sensor technologies |
| US10020678B1 (en) | 2015-09-22 | 2018-07-10 | Energous Corporation | Systems and methods for selecting antennas to generate and transmit power transmission waves |
| US10050470B1 (en) | 2015-09-22 | 2018-08-14 | Energous Corporation | Wireless power transmission device having antennas oriented in three dimensions |
| US10033222B1 (en) | 2015-09-22 | 2018-07-24 | Energous Corporation | Systems and methods for determining and generating a waveform for wireless power transmission waves |
| US10135294B1 (en) | 2015-09-22 | 2018-11-20 | Energous Corporation | Systems and methods for preconfiguring transmission devices for power wave transmissions based on location data of one or more receivers |
| US10333332B1 (en) | 2015-10-13 | 2019-06-25 | Energous Corporation | Cross-polarized dipole antenna |
| US10734717B2 (en) | 2015-10-13 | 2020-08-04 | Energous Corporation | 3D ceramic mold antenna |
| US9899744B1 (en) | 2015-10-28 | 2018-02-20 | Energous Corporation | Antenna for wireless charging systems |
| US9853485B2 (en) | 2015-10-28 | 2017-12-26 | Energous Corporation | Antenna for wireless charging systems |
| US10027180B1 (en) | 2015-11-02 | 2018-07-17 | Energous Corporation | 3D triple linear antenna that acts as heat sink |
| US10135112B1 (en) | 2015-11-02 | 2018-11-20 | Energous Corporation | 3D antenna mount |
| US10063108B1 (en) | 2015-11-02 | 2018-08-28 | Energous Corporation | Stamped three-dimensional antenna |
| KR101691536B1 (ko) * | 2015-11-06 | 2017-01-02 | 한국원자력의학원 | 신규 fak 저해제를 유효성분으로 포함하는 방사선 민감성 증진용 조성물 |
| US10320446B2 (en) | 2015-12-24 | 2019-06-11 | Energous Corporation | Miniaturized highly-efficient designs for near-field power transfer system |
| US10027159B2 (en) | 2015-12-24 | 2018-07-17 | Energous Corporation | Antenna for transmitting wireless power signals |
| US10027158B2 (en) | 2015-12-24 | 2018-07-17 | Energous Corporation | Near field transmitters for wireless power charging of an electronic device by leaking RF energy through an aperture |
| US10038332B1 (en) | 2015-12-24 | 2018-07-31 | Energous Corporation | Systems and methods of wireless power charging through multiple receiving devices |
| US11863001B2 (en) | 2015-12-24 | 2024-01-02 | Energous Corporation | Near-field antenna for wireless power transmission with antenna elements that follow meandering patterns |
| US10256677B2 (en) | 2016-12-12 | 2019-04-09 | Energous Corporation | Near-field RF charging pad with adaptive loading to efficiently charge an electronic device at any position on the pad |
| US10079515B2 (en) | 2016-12-12 | 2018-09-18 | Energous Corporation | Near-field RF charging pad with multi-band antenna element with adaptive loading to efficiently charge an electronic device at any position on the pad |
| US10164478B2 (en) | 2015-12-29 | 2018-12-25 | Energous Corporation | Modular antenna boards in wireless power transmission systems |
| WO2017183888A2 (en) | 2016-04-19 | 2017-10-26 | Samsung Electronics Co., Ltd. | Positioning method and apparatus |
| KR20170119618A (ko) * | 2016-04-19 | 2017-10-27 | 삼성전자주식회사 | 측위 방법, 측위 장치, 및 측위 시스템 |
| US10386478B2 (en) * | 2016-05-18 | 2019-08-20 | International Business Machines Corporation | Range-independent resolution radar |
| US10637575B2 (en) | 2016-05-25 | 2020-04-28 | Wisconsin Alumni Research Foundation | Spatial location indoors using standard fluorescent fixtures |
| US10028100B2 (en) * | 2016-06-27 | 2018-07-17 | International Business Machines Corporation | Methods and systems for improving accuracy of indoor positioning |
| KR102494550B1 (ko) * | 2016-10-12 | 2023-02-02 | 주식회사 위츠 | 정보 송신 장치 |
| US11181636B2 (en) * | 2016-10-20 | 2021-11-23 | Samsung Electronics Co., Ltd. | Electronic apparatus and method of detecting information about target object by using ultrasound waves |
| US10923954B2 (en) | 2016-11-03 | 2021-02-16 | Energous Corporation | Wireless power receiver with a synchronous rectifier |
| KR102349607B1 (ko) | 2016-12-12 | 2022-01-12 | 에너저스 코포레이션 | 전달되는 무선 전력을 최대화하기 위한 근접장 충전 패드의 안테나 존들을 선택적으로 활성화시키는 방법 |
| US10439442B2 (en) | 2017-01-24 | 2019-10-08 | Energous Corporation | Microstrip antennas for wireless power transmitters |
| US10680319B2 (en) | 2017-01-06 | 2020-06-09 | Energous Corporation | Devices and methods for reducing mutual coupling effects in wireless power transmission systems |
| US10389161B2 (en) | 2017-03-15 | 2019-08-20 | Energous Corporation | Surface mount dielectric antennas for wireless power transmitters |
| US10015769B1 (en) * | 2017-03-16 | 2018-07-03 | Lonprox Corporation | Systems and methods for indoor positioning using wireless positioning nodes |
| US11011942B2 (en) | 2017-03-30 | 2021-05-18 | Energous Corporation | Flat antennas having two or more resonant frequencies for use in wireless power transmission systems |
| US10511097B2 (en) | 2017-05-12 | 2019-12-17 | Energous Corporation | Near-field antennas for accumulating energy at a near-field distance with minimal far-field gain |
| US11462949B2 (en) | 2017-05-16 | 2022-10-04 | Wireless electrical Grid LAN, WiGL Inc | Wireless charging method and system |
| JP7079271B2 (ja) | 2017-05-18 | 2022-06-01 | ソニーグループ株式会社 | レーダーアシストされた無線データ通信の実行方法 |
| US10321332B2 (en) | 2017-05-30 | 2019-06-11 | Movandi Corporation | Non-line-of-sight (NLOS) coverage for millimeter wave communication |
| US10469763B2 (en) | 2017-06-07 | 2019-11-05 | Wisconsin Alumni Research Foundation | Visual privacy protection system |
| US10848853B2 (en) | 2017-06-23 | 2020-11-24 | Energous Corporation | Systems, methods, and devices for utilizing a wire of a sound-producing device as an antenna for receipt of wirelessly delivered power |
| US10484078B2 (en) | 2017-07-11 | 2019-11-19 | Movandi Corporation | Reconfigurable and modular active repeater device |
| US10122219B1 (en) | 2017-10-10 | 2018-11-06 | Energous Corporation | Systems, methods, and devices for using a battery as a antenna for receiving wirelessly delivered power from radio frequency power waves |
| US11342798B2 (en) | 2017-10-30 | 2022-05-24 | Energous Corporation | Systems and methods for managing coexistence of wireless-power signals and data signals operating in a same frequency band |
| US10348371B2 (en) | 2017-12-07 | 2019-07-09 | Movandi Corporation | Optimized multi-beam antenna array network with an extended radio frequency range |
| US10862559B2 (en) | 2017-12-08 | 2020-12-08 | Movandi Corporation | Signal cancellation in radio frequency (RF) device network |
| US10090887B1 (en) | 2017-12-08 | 2018-10-02 | Movandi Corporation | Controlled power transmission in radio frequency (RF) device network |
| CN108562906B (zh) * | 2018-01-16 | 2022-02-15 | 辽宁石油化工大学 | 声波测距方法及装置 |
| WO2019148000A1 (en) * | 2018-01-26 | 2019-08-01 | 3M Innovative Properties Company | Roadway markings with radar antenna |
| KR102104166B1 (ko) * | 2018-01-30 | 2020-04-23 | 홍익대학교 산학협력단 | 근거리장 및 원거리장에 존재하는 복수의 타겟에 동시 다중 빔을 전송하기 위한 송신 장치 |
| US10615647B2 (en) | 2018-02-02 | 2020-04-07 | Energous Corporation | Systems and methods for detecting wireless power receivers and other objects at a near-field charging pad |
| US11088457B2 (en) | 2018-02-26 | 2021-08-10 | Silicon Valley Bank | Waveguide antenna element based beam forming phased array antenna system for millimeter wave communication |
| US10637159B2 (en) | 2018-02-26 | 2020-04-28 | Movandi Corporation | Waveguide antenna element-based beam forming phased array antenna system for millimeter wave communication |
| US10720965B2 (en) | 2018-03-14 | 2020-07-21 | Rohde & Schwarz Gmbh & Co. Kg | Measurement system and method for operating a measurement system |
| US11159057B2 (en) | 2018-03-14 | 2021-10-26 | Energous Corporation | Loop antennas with selectively-activated feeds to control propagation patterns of wireless power signals |
| EP3561528A1 (en) | 2018-04-25 | 2019-10-30 | Rohde & Schwarz GmbH & Co. KG | Measurement arrangement and measurement method |
| JP7110727B2 (ja) * | 2018-05-24 | 2022-08-02 | 凸版印刷株式会社 | ビーコン発信機位置抽出システム及びビーコン発信機位置抽出方法 |
| US10637527B2 (en) * | 2018-06-21 | 2020-04-28 | Qorvo Us, Inc. | Sequentially switched bulk acoustic wave (BAW) delay line circulator |
| US11515732B2 (en) | 2018-06-25 | 2022-11-29 | Energous Corporation | Power wave transmission techniques to focus wirelessly delivered power at a receiving device |
| CN109143250B (zh) * | 2018-07-09 | 2023-04-07 | 上海肖可雷电子科技有限公司 | 一种基于激光定位的系统与方法 |
| CN109379707B (zh) * | 2018-08-31 | 2020-09-01 | 北京大学(天津滨海)新一代信息技术研究院 | 一种基于无线信号的室内目标活动区域识别方法及系统 |
| US10971818B2 (en) * | 2018-09-04 | 2021-04-06 | Elwha Llc | Open cavity system for directed amplification of radio frequency signals |
| US11789117B2 (en) * | 2018-09-27 | 2023-10-17 | Ay Dee Kay Llc | Active reflector with oscillation inhibition |
| CN109459750B (zh) * | 2018-10-19 | 2023-05-23 | 吉林大学 | 一种毫米波雷达与深度学习视觉融合的前方多车辆跟踪方法 |
| WO2020096506A1 (en) * | 2018-11-09 | 2020-05-14 | Telefonaktiebolaget Lm Ericsson (Publ) | Using mirrors as a positioning solution |
| US11437735B2 (en) | 2018-11-14 | 2022-09-06 | Energous Corporation | Systems for receiving electromagnetic energy using antennas that are minimally affected by the presence of the human body |
| DE102018128962A1 (de) * | 2018-11-19 | 2020-05-20 | Rheinmetall Waffe Munition Gmbh | Verfahren zur Bestimmung der Position eines Objektes, Vorrichtung zur Bestimmung der Position eines Objektes und System |
| US11240773B2 (en) * | 2018-12-07 | 2022-02-01 | Google Llc | Managing doppler and framing impacts in networks |
| CN111342890B (zh) * | 2018-12-18 | 2021-06-25 | 北京金坤科创技术有限公司 | 一种判断信号发生反射的方法 |
| US20200205204A1 (en) * | 2018-12-20 | 2020-06-25 | Arris Enterprises Llc | Wireless network topology using specular and diffused reflections |
| JP2022523022A (ja) | 2019-01-28 | 2022-04-21 | エナージャス コーポレイション | 無線送電のための小型アンテナ用のシステム及び方法 |
| EP3921945A1 (en) | 2019-02-06 | 2021-12-15 | Energous Corporation | Systems and methods of estimating optimal phases to use for individual antennas in an antenna array |
| US10735035B1 (en) | 2019-03-11 | 2020-08-04 | Apple Inc. | Sensor circuit with tracking filter and leakage rejection |
| EP3719304A1 (en) * | 2019-04-01 | 2020-10-07 | Siemens Gamesa Renewable Energy A/S | Communication system for a wind turbine |
| US11181632B2 (en) * | 2019-04-08 | 2021-11-23 | Augmented Radar Imaging, Inc. | Passive radar identification device |
| NL2023539B1 (en) * | 2019-07-19 | 2021-02-08 | Fnv Ip Bv | Method of and apparatus for monitoring position, orientation and/or shape of an object |
| CN110445510B (zh) * | 2019-07-23 | 2022-05-31 | 纳瓦电子(上海)有限公司 | 一种正交相移键控抑制同频干扰的方法 |
| AU2020330972A1 (en) | 2019-08-12 | 2022-03-31 | Dusty Robotics, Inc. | Improved position accuracy mobile robot printing system |
| US11229002B2 (en) | 2019-09-05 | 2022-01-18 | Apple Inc. | Ranging with a mobile cellular device |
| CN110673092A (zh) * | 2019-09-10 | 2020-01-10 | 清研讯科(北京)科技有限公司 | 基于超宽带的分时定位方法及装置、系统 |
| EP4028220A4 (en) | 2019-09-13 | 2023-10-04 | Dusty Robotics, Inc. | MOBILE ROBOT PRINT WITH WIND PROTECTION |
| US11381118B2 (en) | 2019-09-20 | 2022-07-05 | Energous Corporation | Systems and methods for machine learning based foreign object detection for wireless power transmission |
| EP4032166A4 (en) | 2019-09-20 | 2023-10-18 | Energous Corporation | SYSTEMS AND METHODS FOR PROTECTING WIRELESS POWER RECEIVERS USING MULTIPLE RECTIFIER AND ESTABLISHING IN-BAND COMMUNICATIONS USING MULTIPLE RECTIFIER |
| WO2021055900A1 (en) | 2019-09-20 | 2021-03-25 | Energous Corporation | Classifying and detecting foreign objects using a power amplifier controller integrated circuit in wireless power transmission systems |
| WO2021053640A1 (en) * | 2019-09-20 | 2021-03-25 | University Of Kansas | Devoid clutter capture and filling (deccaf) to compensate for intra-cpi spectral notch variation |
| WO2021055898A1 (en) | 2019-09-20 | 2021-03-25 | Energous Corporation | Systems and methods for machine learning based foreign object detection for wireless power transmission |
| CN111107626A (zh) * | 2019-12-13 | 2020-05-05 | 重庆邮电大学 | 一种基于时间反演的doa定位方法 |
| US11355966B2 (en) | 2019-12-13 | 2022-06-07 | Energous Corporation | Charging pad with guiding contours to align an electronic device on the charging pad and efficiently transfer near-field radio-frequency energy to the electronic device |
| US10985617B1 (en) | 2019-12-31 | 2021-04-20 | Energous Corporation | System for wirelessly transmitting energy at a near-field distance without using beam-forming control |
| CN111443347B (zh) * | 2020-03-17 | 2022-05-27 | 山东省科学院自动化研究所 | 一种便携式单手持穿墙雷达目标检测装置及目标检测方法 |
| US11784674B2 (en) * | 2020-03-24 | 2023-10-10 | Qualcomm Incorporated | Calibration of open space for an antenna array module |
| US20210302561A1 (en) * | 2020-03-31 | 2021-09-30 | Huawei Technologies Co., Ltd. | Systems and methods for locating user equipment in a wireless network |
| US11799324B2 (en) | 2020-04-13 | 2023-10-24 | Energous Corporation | Wireless-power transmitting device for creating a uniform near-field charging area |
| DE102020204819A1 (de) * | 2020-04-16 | 2021-10-21 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren und Vorrichtung zur Ermittlung einer Position eines mobilen Teilnehmers eines Drahtloskommunikationsnetzwerks, Teilnehmer des Drahtloskommunikationsnetzwerks, entfernt angeordnete Netzwerkeinheit, Drahtloskommunikationsnetzwerk |
| CN111631474A (zh) * | 2020-05-25 | 2020-09-08 | 深圳供电局有限公司 | 安全帽 |
| KR20220036108A (ko) * | 2020-09-15 | 2022-03-22 | 삼성전자주식회사 | 전자 장치 및 그 제어 방법 |
| JP7384137B2 (ja) | 2020-09-22 | 2023-11-21 | 株式会社Soken | 測位装置 |
| CN112305896A (zh) * | 2020-11-13 | 2021-02-02 | 四川写正智能科技有限公司 | 一种智能手表救助的方法及手表 |
| US11743682B2 (en) * | 2021-04-13 | 2023-08-29 | Qualcomm Incorporated | Indoor map generation using radio frequency sensing |
| CN113406569B (zh) * | 2021-05-28 | 2023-08-18 | 广州辰创科技发展有限公司 | 一种应用于低慢小目标探测的三坐标雷达系统 |
| DE102021206165A1 (de) * | 2021-06-16 | 2022-12-22 | Pepperl+Fuchs Se | Messeinrichtung und messverfahren |
| WO2023072380A1 (en) * | 2021-10-27 | 2023-05-04 | Huawei Technologies Co., Ltd. | Devices and methods for positioning in a wireless network |
| US11916398B2 (en) | 2021-12-29 | 2024-02-27 | Energous Corporation | Small form-factor devices with integrated and modular harvesting receivers, and shelving-mounted wireless-power transmitters for use therewith |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050270227A1 (en) * | 2003-07-03 | 2005-12-08 | Stephens Scott A | Positioning system with intentional multi-path signal |
| US20060106850A1 (en) * | 2004-10-29 | 2006-05-18 | Skyhook Wireless, Inc. | Location beacon database |
| KR20130041195A (ko) * | 2010-07-16 | 2013-04-24 | 시버스 이마 아베 | 연속파 레이더 측정들을 위한 방법 및 디바이스 |
| KR20140068911A (ko) * | 2011-08-03 | 2014-06-09 | 인비시트랙, 인크. | 감소된 감쇠 rf 기술을 이용하여 오브젝트들을 거리 측정 및 추적할 때의 다중―경로 저감 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3480951A (en) * | 1968-05-15 | 1969-11-25 | Us Air Force | Retrodirective phase shifting transponder |
| NL9002683A (nl) * | 1990-12-06 | 1992-07-01 | Nedap Nv | Retro-reflectieve microgolf transponder. |
| DE4306660C2 (de) * | 1993-03-03 | 2000-09-21 | Daimler Chrysler Ag | System zur Ortung und Identifizierung von Fahrzeugen auf einem Flugplatz |
| DE9411602U1 (de) * | 1994-07-18 | 1995-08-17 | Siemens Ag | Anordnung zum Feststellen von Objekten in einem zu überwachenden Bereich |
| US5579008A (en) * | 1995-07-14 | 1996-11-26 | Hughes Missile Systems Company | Electronic license plate apparatus and method |
| WO1999038897A1 (fr) * | 1998-01-30 | 1999-08-05 | Hydro-Quebec | Polymeres sulfones reticules et leur procede de preparation |
| US6630905B1 (en) * | 2000-11-10 | 2003-10-07 | Raytheon Company | System and method for redirecting a signal using phase conjugation |
| WO2002087275A2 (en) * | 2001-04-24 | 2002-10-31 | Qualcomm Incorporated | Method and apparatus for estimating the position of a terminal based on identification codes for transmission sources |
| US20030008664A1 (en) * | 2001-04-24 | 2003-01-09 | Stein Jeremy M. | Method and apparatus for estimating the postion of a terminal based on identification codes for transmission sources |
| JP2004242122A (ja) | 2003-02-07 | 2004-08-26 | Hitachi Ltd | 無線信号の伝搬時間差に基づく端末位置の測位方法及び測位システム |
| US20050105600A1 (en) | 2003-11-14 | 2005-05-19 | Okulus Networks Inc. | System and method for location tracking using wireless networks |
| JP2008501974A (ja) | 2004-06-09 | 2008-01-24 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 移動装置の位置決定のための信号強度マップの自動生成 |
| JP2006031336A (ja) * | 2004-07-15 | 2006-02-02 | Fujitsu Ltd | Rfidタグの製造方法 |
| JP2013142661A (ja) * | 2012-01-12 | 2013-07-22 | Furuno Electric Co Ltd | レーダ装置、レーダ測位システム、レーダ測位方法及びレーダ測位プログラム |
-
2015
- 2015-08-25 FI FIEP15836980.1T patent/FI3186655T3/fi active
- 2015-08-25 EP EP15836980.1A patent/EP3186655B1/en active Active
- 2015-08-25 CN CN201580051812.1A patent/CN107076842B/zh active Active
- 2015-08-25 WO PCT/US2015/046800 patent/WO2016033110A1/en active Application Filing
- 2015-08-25 US US14/835,554 patent/US9383441B2/en active Active
- 2015-08-25 JP JP2017511339A patent/JP2017529528A/ja active Pending
- 2015-08-25 BR BR112017003997A patent/BR112017003997A2/pt not_active IP Right Cessation
- 2015-08-25 AU AU2015306699A patent/AU2015306699A1/en not_active Abandoned
- 2015-08-25 KR KR1020177008232A patent/KR102400669B1/ko active IP Right Grant
-
2016
- 2016-07-01 US US15/200,785 patent/US10310069B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050270227A1 (en) * | 2003-07-03 | 2005-12-08 | Stephens Scott A | Positioning system with intentional multi-path signal |
| US20060106850A1 (en) * | 2004-10-29 | 2006-05-18 | Skyhook Wireless, Inc. | Location beacon database |
| KR20130041195A (ko) * | 2010-07-16 | 2013-04-24 | 시버스 이마 아베 | 연속파 레이더 측정들을 위한 방법 및 디바이스 |
| KR20140068911A (ko) * | 2011-08-03 | 2014-06-09 | 인비시트랙, 인크. | 감소된 감쇠 rf 기술을 이용하여 오브젝트들을 거리 측정 및 추적할 때의 다중―경로 저감 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020096365A1 (en) * | 2018-11-07 | 2020-05-14 | Samsung Electronics Co., Ltd. | Motion assisted leakage removal for radar applications |
| CN112673277A (zh) * | 2018-11-07 | 2021-04-16 | 三星电子株式会社 | 用于雷达应用的运动辅助泄漏去除 |
| US11165462B2 (en) | 2018-11-07 | 2021-11-02 | Samsung Electronics Co., Ltd. | Motion assisted leakage removal for radar applications |
| KR20200069994A (ko) | 2018-12-08 | 2020-06-17 | 오승민 | 받침대로 사용 가능한 아이스컵 홀더 |
| WO2022025484A1 (ko) * | 2020-07-31 | 2022-02-03 | 국방과학연구소 | 양자 레이더의 목표물 검출을 위한 제곱 호모다인 측정 이용 양자 수신기 및 그 측정 방법 |
| KR20220015561A (ko) * | 2020-07-31 | 2022-02-08 | 국방과학연구소 | 양자 레이더의 목표물 검출을 위한 제곱 호모다인 측정 이용 양자 수신기 및 그 측정 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102400669B1 (ko) | 2022-05-20 |
| EP3186655B1 (en) | 2023-03-08 |
| FI3186655T3 (fi) | 2023-06-08 |
| US20170131398A1 (en) | 2017-05-11 |
| US10310069B2 (en) | 2019-06-04 |
| US9383441B2 (en) | 2016-07-05 |
| CN107076842B (zh) | 2021-03-05 |
| JP2017529528A (ja) | 2017-10-05 |
| BR112017003997A2 (pt) | 2018-01-30 |
| EP3186655A4 (en) | 2018-09-19 |
| AU2015306699A1 (en) | 2017-03-16 |
| CN107076842A (zh) | 2017-08-18 |
| US20160054440A1 (en) | 2016-02-25 |
| EP3186655A1 (en) | 2017-07-05 |
| WO2016033110A1 (en) | 2016-03-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102400669B1 (ko) | 지연된 스캐닝된 방향성 반사기를 사용한 실내 위치 측위 | |
| KR102130933B1 (ko) | 무선 위치지정 노드를 사용하여 실내 위치를 지정하기 위한 시스템 및 방법 | |
| US20200386844A1 (en) | Angle of Arrival Measurements Using RF Carrier Synchronization and Phase Alignment Methods | |
| Hajiakhondi-Meybodi et al. | Bluetooth low energy-based angle of arrival estimation via switch antenna array for indoor localization | |
| KR102145095B1 (ko) | Rf를 사용하여 위치 파악하기 위한 부분적으로 동기화된 다변측량 또는 삼변측량 방법 및 시스템 | |
| US9037194B2 (en) | Method of using a ranging system to determine the location of a node relative to a beacon | |
| CN106922219A (zh) | 针对使用rf的位置寻找的部分同步多边测量/三边测量方法和系统 | |
| JP3991081B2 (ja) | アクテイブタグ装置 | |
| WO2016164031A1 (en) | Beacon and associated components for a ranging system | |
| KR20020026562A (ko) | 낮은 정확도의 클록을 사용하여 이동 통신 장치의 위치를결정하기 위한 방법 및 장치 | |
| US20120014412A1 (en) | Positioning system and positioning method | |
| WO2021021727A1 (en) | System and method for indoor location | |
| Gierlich et al. | A reconfigurable MIMO system for high-precision FMCW local positioning | |
| EP3418761A1 (en) | Method and system for determining a position | |
| US10536920B1 (en) | System for location finding | |
| Duran et al. | Terrestrial network-based positioning and navigation | |
| EP2815249A1 (en) | Method and apparatus for estimating a distance and a location through near-field multi-frequency radio transmissions | |
| Cyganski et al. | WPI precision personnel locator system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E902 | Notification of reason for refusal | ||
| AMND | Amendment | ||
| E601 | Decision to refuse application | ||
| AMND | Amendment | ||
| X701 | Decision to grant (after re-examination) | ||
| GRNT | Written decision to grant |