KR20160068922A - 소나서저리 수행 시스템 및 방법 - Google Patents
소나서저리 수행 시스템 및 방법 Download PDFInfo
- Publication number
- KR20160068922A KR20160068922A KR1020167012318A KR20167012318A KR20160068922A KR 20160068922 A KR20160068922 A KR 20160068922A KR 1020167012318 A KR1020167012318 A KR 1020167012318A KR 20167012318 A KR20167012318 A KR 20167012318A KR 20160068922 A KR20160068922 A KR 20160068922A
- Authority
- KR
- South Korea
- Prior art keywords
- probe
- patient
- surgical procedure
- surgical
- port
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 111
- 239000000523 sample Substances 0.000 claims abstract description 149
- 230000004807 localization Effects 0.000 claims abstract description 33
- 238000011282 treatment Methods 0.000 claims description 51
- 238000001356 surgical procedure Methods 0.000 claims description 43
- 230000008685 targeting Effects 0.000 claims description 34
- 238000003384 imaging method Methods 0.000 claims description 30
- 230000004048 modification Effects 0.000 claims description 12
- 238000012986 modification Methods 0.000 claims description 12
- 238000003780 insertion Methods 0.000 claims description 8
- 230000037431 insertion Effects 0.000 claims description 8
- 230000008569 process Effects 0.000 claims description 4
- 239000003550 marker Substances 0.000 claims description 3
- 239000013307 optical fiber Substances 0.000 claims description 3
- 230000000977 initiatory effect Effects 0.000 claims 1
- 210000001519 tissue Anatomy 0.000 description 50
- 230000003287 optical effect Effects 0.000 description 17
- CURLTUGMZLYLDI-UHFFFAOYSA-N Carbon dioxide Chemical compound O=C=O CURLTUGMZLYLDI-UHFFFAOYSA-N 0.000 description 14
- 230000006870 function Effects 0.000 description 14
- 230000000740 bleeding effect Effects 0.000 description 12
- 230000008859 change Effects 0.000 description 12
- 238000005516 engineering process Methods 0.000 description 11
- 238000003860 storage Methods 0.000 description 10
- 230000033001 locomotion Effects 0.000 description 8
- 229910002092 carbon dioxide Inorganic materials 0.000 description 7
- 239000001569 carbon dioxide Substances 0.000 description 7
- 238000004891 communication Methods 0.000 description 7
- 239000000835 fiber Substances 0.000 description 6
- 238000012545 processing Methods 0.000 description 6
- 238000012800 visualization Methods 0.000 description 5
- 238000012634 optical imaging Methods 0.000 description 4
- 230000008520 organization Effects 0.000 description 4
- 238000002604 ultrasonography Methods 0.000 description 4
- 210000003484 anatomy Anatomy 0.000 description 3
- 238000005520 cutting process Methods 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 238000002682 general surgery Methods 0.000 description 3
- 238000002350 laparotomy Methods 0.000 description 3
- 230000002441 reversible effect Effects 0.000 description 3
- 206010028980 Neoplasm Diseases 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 238000003491 array Methods 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 201000011510 cancer Diseases 0.000 description 2
- 230000003915 cell function Effects 0.000 description 2
- 238000003745 diagnosis Methods 0.000 description 2
- 238000002059 diagnostic imaging Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000002357 laparoscopic surgery Methods 0.000 description 2
- 238000002595 magnetic resonance imaging Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000000399 orthopedic effect Effects 0.000 description 2
- 210000002307 prostate Anatomy 0.000 description 2
- 238000001959 radiotherapy Methods 0.000 description 2
- 230000007480 spreading Effects 0.000 description 2
- 238000003892 spreading Methods 0.000 description 2
- 238000002560 therapeutic procedure Methods 0.000 description 2
- 230000001052 transient effect Effects 0.000 description 2
- 238000012285 ultrasound imaging Methods 0.000 description 2
- 201000006306 Cor pulmonale Diseases 0.000 description 1
- 238000005481 NMR spectroscopy Methods 0.000 description 1
- 241000387514 Waldo Species 0.000 description 1
- 238000012084 abdominal surgery Methods 0.000 description 1
- 238000002679 ablation Methods 0.000 description 1
- 238000005576 amination reaction Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 238000001574 biopsy Methods 0.000 description 1
- 210000004556 brain Anatomy 0.000 description 1
- 230000002612 cardiopulmonary effect Effects 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 238000002224 dissection Methods 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 230000002526 effect on cardiovascular system Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000004927 fusion Effects 0.000 description 1
- 238000002329 infrared spectrum Methods 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000007912 intraperitoneal administration Methods 0.000 description 1
- 230000002262 irrigation Effects 0.000 description 1
- 238000003973 irrigation Methods 0.000 description 1
- 208000017169 kidney disease Diseases 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 230000004060 metabolic process Effects 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000035699 permeability Effects 0.000 description 1
- 230000001766 physiological effect Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 238000002271 resection Methods 0.000 description 1
- 230000004202 respiratory function Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000002432 robotic surgery Methods 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000004659 sterilization and disinfection Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 230000001225 therapeutic effect Effects 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
- 230000008733 trauma Effects 0.000 description 1
- 238000002211 ultraviolet spectrum Methods 0.000 description 1
- 238000001429 visible spectrum Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3417—Details of tips or shafts, e.g. grooves, expandable, bendable; Multiple coaxial sliding cannulas, e.g. for dilating
- A61B17/3421—Cannulas
- A61B17/3423—Access ports, e.g. toroid shape introducers for instruments or hands
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/76—Manipulators having means for providing feel, e.g. force or tactile feedback
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/12—Diagnosis using ultrasonic, sonic or infrasonic waves in body cavities or body tracts, e.g. by using catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
- A61B90/11—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis with guides for needles or instruments, e.g. arcuate slides or ball joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00398—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like using powered actuators, e.g. stepper motors, solenoids
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3417—Details of tips or shafts, e.g. grooves, expandable, bendable; Multiple coaxial sliding cannulas, e.g. for dilating
- A61B17/3421—Cannulas
- A61B2017/3445—Cannulas used as instrument channel for multiple instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/107—Visualisation of planned trajectories or target regions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2063—Acoustic tracking systems, e.g. using ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2068—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis using pointers, e.g. pointers having reference marks for determining coordinates of body points
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2072—Reference field transducer attached to an instrument or patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/302—Surgical robots specifically adapted for manipulations within body cavities, e.g. within abdominal or thoracic cavities
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3983—Reference marker arrangements for use with image guided surgery
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Robotics (AREA)
- Pathology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Radiology & Medical Imaging (AREA)
- Surgical Instruments (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
- Measuring And Recording Apparatus For Diagnosis (AREA)
Abstract
소나서저리(sonasurgery) 수행 장치 및 방법은 국부화 기술을 가진 적어도 하나의 프로브와 룸 좌표계를 포함할 수 있다. 프로브의 위치는 시술 과정 중 연속적으로 추적될 수 있어서, 그 위치가 알려지고 수술전 MRI/CXRT에 대해 업데이트되게 된다.
Description
관련 출원의 상호 참조
본 출원은 2013년 10월 11일 출원된 미국특허가출원 제61/889,863호의 우선권을 주장하는, 2014년 10월 10일 출원된 국제출원 PCT/US2014/060066호의 미국 국내단계출원이며, 두 출원 모두 그 내용 전체가 본 발명에 포함된다.
일반 외과 및 특히 복부 외과 분야는 과거 50년간 기술적 진보를 거쳐왔으나, 전체적으로는 일반 외과 실습에서 거의 변화를 겪지 못했다. 첫번째로, 개복술 - 큰 열린 공간 내에 큰 기기로 단일 대형 절개 - 가 존재하였다. 그 후, 분야가 복강경 수술 영역 - 절개부를 통과하는 감소된 크기의 기기들을 가진 복수의 더 작은 절개부 - 으로 이동하였다. 이어서 로봇 수술이 나타났다 - 외부의 동력화된(motorized) 장치들에 의해 대신 보유되는 작은 맞춤형 툴이 지나갈 수 있는 포트로 플러깅된 훨씬 더 작은 복수의 개구부들이 존재하고, 이 경우 환자로부터 떨어져있는 외과의가 자신의 움직임을 모방하는 외부 모터로 시술을 안내할 수 있다. 가장 최근에 단일 포트 수술이 이 분야에 도입되었고, 이 경우 시술의는 복수의 툴을 위해 내부에 복수의 작은 통로를 가진 단일 포트를 이용한다.
기술과 관계없이, 현재의 수술법은 동일한 시술에 여전히 초점을 맞추고 있고, 동일한 수술적 문제점과 함께, 아마도 가장 중요한 것은 동일한 결과다. 알려진 기법들 각각을 이용하여, 외과의는 통상적으로 자신이 위치한 곳을 보기 위해, 통상적으로, 추가적인 포트를 통해 유입되는 광섬유 이미징 기술 또는 직접 관찰을 이용하여 조직을 프로빙(probing), 스프레딩(spreading), 절단, 버징(buzzing), 및 흡입하여야 한다. 파괴를 목표로하는 조직을 제거하기 위해 칼이 사용되며, 수술실 내에 기동할 공간을 필요로한다. 칼을 이용함으로써 출혈이 나타나며, 이는 출혈 제어를 위해 룸의 더 큰 필요성을 생성한다. 외과의는 종종 수술전("preop") 이미지를 이용하여 그 세계의 정신적 뷰를 안내할 수 있으나, 방사선요법(RT) 또는 정위 뇌수술에서 이루어지는 바와 같이 실제 시술을 안내하지는 못한다. 일반 외과에서, 이미지로부터 도출되는 수술전 데이터와 수술의 시각적 데이터 간에 이루어지는 어떤 링크 또는 연결도 존재하지 않는다. 외과의는 자신이 환자 내부에 위치하는 위치를 보기 위해 광학적 이미징을 하는, 개복술에서처럼 툴의 보지를 돕기 위해 보조기를 종종 필요로하고, 환자의 전체 범위를 갖는 광학 스코프를 통해 실현되는 작은 창의 시각화와 관계하도록 자신의 능력을 신뢰할 필요가 종종 있다. 외과의가 컴퓨터를 이용하여 수술 계획을 생성할 수 있으나, 이 계획의 실행은 전적으로 외과의의 지시 및 제어 하에 있고, 전체 절차는 통상적으로 수동적인 움직임과 "한 번에 한 단계씩" 태도에 기초하여 수행된다. "로봇 수술"을 이용하는 경우에도, 결정을 하거나 자체적으로 단지 이동하는 고전적 개념의 자동 장치에 통상적으로 로봇이 존재하지 않는다. 대신에, "로봇"은 "왈도"(waldo)이고, "로봇" 기기의 움직임은 실제 수술 장소로부터 지리적으로 변위된 외과의의 움직임을 미러링(mirroring)한다.
모든 복강경 및 로봇 시술에 공통적인 특징은 요망 시술 수행에 요구되는, 외과의가 기기 조작을 위해 필요한 충분한 공간을 생성하기 위해 체강을 부풀리도록 이산화탄소(CO2) 가스를 이용하는 것이다. CO2에 의해 발전되는 작업 공간은 환자에 제시되는 가스의 압력에 좌우된다 - CO2 흡입 압력이 높을수록, 수술 장소를 더 잘 볼 수 있으나 복잡도의 위험이 커진다.
CO2 흡입으로 나타나는 생리학적 효과는 과도기적인 것일 수 있고, CO2 흡수에 부차적인 신체 화학대사의 변화와, 복강압 증가로부터 나타나는 호흡 기능의 절충, 복강-내 압력 증가에 대한 신체의 반응으로부터 도출될 수 있다. 그렇지 않고 건강한 사람은 복강경을 잘 견디겠지만, 심폐 또는 신장 질환을 가진 자들은 계속적인 CO2 흡입을 견디지 못할 것이다. 추가적으로, 예를 들어, 전립선 절제에 사용되는 급한 트렌델렌버그(steep trendelenburg) 자세로 위치하는 환자는 복강경 검사로 심혈관 변동을 악화시킬 수 있다. 이와 관계없이, 흡입 제공 필요성은 손상된 환자의 생명을 위협할 수 있는 합병증 가능성, 추가적인 장비, 비용을 요구한다.
외과적 접근에서의 각각의 순차적 진보 - 개복술로부터 복강경 검사, 로봇 시술, "단일" 포트까지 - 는 환자 내부에 있는 외과의의 손으로부터, 환자 외부이지만 인접한 곳까지, 환자에 떨어진 곳까지, 외과의의 손의 "위치"에 의해, 그리고, 사용되는 기기 및 수술 구멍의 개수 및 크기에 의해 변형되는 개복술로 보일 수 있다. 그러나, 이러한 동일한 손들은 조직 절단에 사용되는 외과 블레이드를 취급하며, 이러한 동일한 또는 다른 손들이 그 후 중지시켜야하는 출혈을 생성한다.
따라서, 목표 조직의 외과적 제거를 향한 새로운 접근법이 바람직하다. 즉, 칼 및 관련 출혈의 필요성을, 완전하지는 않더라도, 일반적으로 완화시킬 수 있는 방식, 단일 포트를 이용하여 시술을 행하는 방식, 수술중 데이터를 수술전 데이터와 상관시키는 방식, 및/또는 외과의의 지시 하에 계획된 바 대로 시술을 진행시키되 컴퓨터 또는 로봇에 의해 실행되는 방식이 필요하다.
일 실시예에서, 본 발명은 상호교환가능한 일련의 외과용 프로브를 포함한다. 각각의 프로브는 해부(dissecting), 탐침(probing), 스프레딩(spreading), 흡입(sucking), 생체검사(biopsing), 및 조직 변경(altering tissue)과 같은, 특정 용도로 설계될 수 있고, 이 모두는 공통 시스(sheath)를 통해 들어올 수 있고, 각각의 프로브는 광학 이미징, 진단 이미징, 초음파 이미징, 조직 변경, 촉각 피드백, 및 위치 확인/추적을 포함하는, 그러나 이에 제한되지 않는, 리스트로부터 적어도 2개의 기술의 소정의 조합을 포함하며, 따라서, 변경되는 조직의 위치 및 임상적 상태 및/또는 주변 조직의 상태를 확인하면서 조직 내의 일시적 또는 영구적 변경을 발생시키기 위한 기능을 제공할 수 있다. 각각의 프로브는 크기(가령, 길이, 직경, 등)를 달리할 수 있다. 기술 또는 툴은 샤프트 자체의 위치 및/또는 배향으로부터 구분되는 샤프트의 원위 단부의 위치 및/또는 배향을 조정하도록, 수동으로 또는 컴퓨터 제어하에 작동되는 일체형 모터 세트 또는 원격 모터 세트에 연결될 수 있는 근위 단부를 가진 강체형 또는 가요성 또는 관절 연결 샤프트(articulating shaft)의 원위 단부에 설치될 수 있다. 이러한 모터는 근위 및 원위 샤프트의 구부러짐, 근위 및 원위 샤프트의 회전, 및 샤프트 근위 단부의 길어짐(lengthening)의 모든 또는 일부 조합을 제어할 수 있다.
광학 이미징 기능을 가진 프로브는, 프로브가 조직 내에 있는 위치를 결정하는데 사용될 수 있고, 관찰을 위한 광 파이프 및 렌즈를 포함할 수 있지만 이에 제한되지 않는다. 진단 이미징 기능을 가진 프로브는, 감마 기술, 근적외선 광 기술, 및 조사 초음파(Interrogative US: Interrogative Ultrasound) 기술을 포함할 수 있지만 이에 제한되지 않는다. 표적 및 주변 조직의 내부 양태를 평가하기 위한 초음파 이미징 기능을 가진 프로브는, 2-D, 3-D 스캐닝, 환형, 선형, 및 페이지 어레이(phased array)를 포함한, 임의의 설계의 가변 주파수의 이미징 트랜스듀서를 포함할 수 있지만, 이에 제한되지 않는다. (영구적 또는 가역적인) 조직 변경 기술을 가진 프로브는, 열적, 전기적, 또는, 레이저, RF, 마이크로파, 크리오(cryo), US, IRC와 같은 다른 수단에 의해 조직의 변경을 제공하는데 사용되는 임의의 형태의 기술을 포함할 수 있으나, 이에 제한되지 않는다. 촉각 피드백 기능을 가진 프로브는 촉각(haptic) 피드백 시스템 및 압력 센서를 포함할 수 있지만, 이에 제한되지 않는다. 알려진 기준점에 대해 기기가 상대적으로 공간 내에 놓인 위치를 추적하는데 사용되는 위치 확인 기술을 가진 프로브는, 광학, 전자기, 및 RF와 같은, 알려진 점에 대해 상대적으로 3차원 공간 내 물체의 위치를 식별 및/또는 추적하는데 사용되는 임의의 형태의 기술을 포함할 수 있지만, 이에 제한되지 않는다.
시스템의 다양한 자유도의 컴퓨터 또는 수동 제어 움직임은 시스와, 시스를 통해 삽입되는 임의의 프로브의 형상 및 위치를 조정할 수 있고, 따라서 프로브는 환자 내의 작은 단일 개구부를 통해 삽입될 수 있으며, 프로브의 원위 단부는 조직의 이미징, 평가, 및 변경 가능성을 위해, 치료 계획 시스템에 의해 결정되는 영역에서 경로를 따라 표적 조직에 전달된다.
본 발명의 추가 실시예에서, 적어도 2개의 자유도를 가진 타게팅 장치(targeting device)가 환자 내에 생성된 또는 자연의 개구부를 통해 장착될 수 있고, 시스 및 프로브가 시스를 통해 적어도 부분적으로 환자 내로 삽입될 수 있다. 이는 치료 계획 시스템에 의해 결정된 것과 일치하는 궤도를 따라 소정의 방향으로 이루어질 수 있다.
본 발명의 다른 실시예에서, 외과 치료 전달 시스템 및 방법은, 프로브의 알려진 조직 변경 특성에 기초하여 치료할 표적 볼륨과, 표적 볼륨으로의 최적 경로를 식별하기 위해 수술전 이미징 및 치료 계획(치료 플래닝)을 수행하는 단계를 포함한다. 프로브 삽입을 위한 최적 포트 배치가, 표적 볼륨에 도달하기 위해 결정될 수 있다. 룸 좌표계를 구축하는, 알려진 고정 랜드마크에 대해 국부화된, US와 같은, 비침습적 형태의 이미징을 이용하여, 치료 개입(therapeutic intervention) 시에 표적 볼륨의 영역을 이미징할 수 있다. 수술 이미지가 수술전 이미지와 합성(fused)되어, 수술전 이미지에 나타나는 표적을 룸 좌표계에 등록시킬 수 있다. 환자 표면 상의 기존 또는 장착된 랜드마크가, 전자기 또는 광학 추적 시스템과 같은 국부화 기술을 이용하여 식별될 수 있다. 단일 포트가, 치료 계획 시스템에 의해 결정되는 바와 같이 수술전 이미지 상에서 위치를 룸 좌표계에 대해 환자에 전달함으로써 기결정된 위치에 배치될 수 있다. 광 파이프를 포함하는 내부 폐색부를 가진 시스가, 치료 계획에 의해 결정되는, 그리고 국부화/추적 장치에 의해 구축되는, 배향으로 포트를 통해 삽입될 수 있다. 하나의 또는 소정 범위의, 상호교환가능한 프로브가 시스를 통해 삽입될 수 있어서, 모든 프로브 및 툴을 포함하여 치료점에 도달할 수 있다. 이루어지는 모든 작업은, (US와 함께 또는 US 없이) 프로브에 통합되는 광섬유 가시화를 이용하여 실현될 수 있고, 프로브의 위치는 프로브 내로 국부화 기술의 채택을 통해 실시간으로 추적되고 치료 스크린 상에 디스플레이된다. 시스는 시술 진행에 따라 프로브를 정확한 위치로 전달하기 위해 필요에 따라 전진할 수 있다. 채택된 기술들 간에 조직 변경 기능을 포함하는 프로브가 표적 볼륨에 삽입될 수 있고, 따라서, 따라서, 추가적인 포트 및 기기의 필요없이, 그리고 출혈없이, 단일 포트를 통해 조직에 액세스할 수 있고, 조직을 변경시킬 수 있다.
본 발명은 외과적 치료를 전달하기 위한 시스템 및 방법을 또한 포함하며, 상기 방법은, 프로브의 알려진 조직 변경 특성에 기초하여 치료할 표적 볼륨과, 표적 볼륨으로의 최적 경로를 식별하기 위해 수술전 이미징 및 치료 계획을 수행하는 단계를 포함한다. 프로브 삽입을 위한 최적 포트 배치는 표적 볼륨 도달을 위해 결정될 수 있다. 룸 좌표계를 구축하는 알려진 고정 랜드마크에 대해 국부화된, US와 같은, 비침습적 형태의 이미징을 이용하여 치료 개입 시에 표적 볼륨의 영역을 이미징할 수 있다. 수술 이미지는 수술전 이미지와 합성(fused)되어, 수술전 이미지에서 보이는 바와 같이 표적을 룸좌표계에 등록시킬 수 있다. 기존의 또는 장착된 랜드마크가 전자기 또는 광학 추적 시스템과 같은 국부화 기술을 이용하여 환자 표면 상에서 식별될 수 있다. 룸좌표계에 대해 상대적으로 환자에게 치료 계획 시스템에 의해 결정되는 바와 같이 수술전 이미지 상의 그 위치를 전달함으로써, 미리 결정된 위치에 단일 포트가 배치될 수 있다. 동력화된 타게팅 시스템이 포트를 통해 장착될 수 있고, 타게팅 시스템의 배향은 지정된 그리고 컴퓨터 제어되는, 궤적을 따라 조정될 수 있다. 광 파이프를 포함하는 내부 폐색부를 가진 시스(sheath)가, 타게팅 시스템을 통해 그리고 그 후 포트를 통해 삽입될 수 있다. 상호교환가능한 하나의 또는 소정 범위의 프로브가 시스를 통해 삽입되어, 모든 프로브 및 툴을 포함하여 치료점에 도달할 수 있고, 이루어지는 모든 작업은 (US와 함께 또는 US 없이) 프로브에 채택된 광섬유 가시화를 이용하여 실현되며, 툴의 위치는 프로브에 국부화 기술의 채택을 통해 실시간으로 추적되고 치료 스크린 상에 디스플레이된다. 시스는 시술 진행에 따라 프로브를 정확한 위치로 전달하기 위해 필요에 따라 전진할 수 있다. 채택된 기술들 간에 조직 변경 기능을 포함하는 프로브가 표적 볼륨에 삽입될 수 있고, 따라서, 추가적인 포트 및 기기의 필요없이, 그리고 출혈없이, 단일 포트를 통해 조직에 액세스할 수 있고, 조직을 변경시킬 수 있다.
본 발명의 일 실시예에 따른 외과적 치료 전달을 위한 다른 시스템 및 방법은, 프로브의 알려진 조직 변경 특성에 기초하여 치료할 표적 볼륨과, 표적 볼륨으로의 최적 경로를 식별하기 위해 수술전 이미징 및 치료 계획을 수행하는 단계를 포함한다. 프로브 삽입을 위한 최적 포트 배치는 표적 볼륨 도달을 위해 결정될 수 있다. 룸 좌표계를 구축하는 알려진 고정 랜드마크에 대해 국부화된, US와 같은, 비침습적 형태의 이미징을 이용하여, 치료 개입 시에 표적 볼륨의 영역을 이미징할 수 있다. 수술 이미지는 수술전 이미지와 합성(fused)되어, 수술전 이미지에서 보이는 바와 같이 표적을 룸좌표계에 등록시킬 수 있다. 기존의 또는 장착된 랜드마크가 전자기 또는 광학 추적 시스템과 같은 국부화 기술을 이용하여 환자 표면 상에서 식별될 수 있다. 룸좌표계에 대해 상대적으로 환자에게 치료 계획 시스템에 의해 결정되는 바와 같이 수술전 이미지 상의 그 위치를 전달함으로써, 미리 결정된 위치에 단일 포트가 배치될 수 있다. 광 파이프를 포함하는 내부 폐색부를 가진 시스(sheath)가, 타게팅 시스템을 통해 그리고 그 후 포트를 통해 삽입될 수 있다. 상호교환가능한 하나의 또는 소정 범위의 프로브가 시스를 통해 삽입되어, 모든 프로브 및 툴을 포함하여 치료점에 도달할 수 있고, 모든 작업은 (US와 함께 또는 US 없이) 프로브에 채택된 광섬유 가시화 하에 이루어지며, 툴의 위치는 프로브에 국부화 기술의 채택을 통해 실시간으로 추적되고 치료 스크린 상에 디스플레이된다. 프로브의 다양한 부분들의 배향은 컴퓨터 제어 하에 자체적으로 그리고 주변 조직에 대해 상대적으로 수정될 수 있다. 시스는 시술 진행에 따라 프로브를 정확한 위치로 전달하기 위해 필요에 따라 전진할 수 있다. 채택된 기술들 간에 조직 변경 기능을 포함하는 프로브가 표적 볼륨에 삽입될 수 있고, 따라서, 추가적인 포트 및 기기의 필요없이, 그리고 출혈없이, 단일 포트를 통해 조직에 액세스할 수 있고, 조직을 변경시킬 수 있다.
본 발명의 다른 실시예에 따르면, 외과 치료 전달 시스템 및 방법은 프로브의 알려진 조직 변경 특성에 기초하여 치료할 표적 볼륨과, 표적 볼륨으로의 최적 경로를 식별하기 위해 수술전 이미징 및 치료 계획을 수행하는 단계를 포함한다. 프로브 삽입을 위한 최적 포트 배치는 표적 볼륨 도달을 위해 결정될 수 있다. 룸 좌표계를 구축하는 알려진 고정 랜드마크에 대해 국부화된, US와 같은, 비침습적 형태의 이미징을 이용하여, 치료 개입 시에 표적 볼륨의 영역을 이미징할 수 있다. 수술 이미지는 수술전 이미지와 합성(fused)되어, 수술전 이미지에서 보이는 바와 같이 표적을 룸좌표계에 등록시킬 수 있다. 기존의 또는 장착된 랜드마크가 전자기 또는 광학 추적 시스템과 같은 국부화 기술을 이용하여 환자 표면 상에서 식별될 수 있다. 룸좌표계에 대해 상대적으로 환자에게 치료 계획 시스템에 의해 결정되는 바와 같이 수술전 이미지 상의 그 위치를 전달함으로써, 미리 결정된 위치에 단일 포트가 배치될 수 있다. 동력화된 타게팅 시스템이 포트 상에 또는 포트 위에 배치될 수 있고, 타게팅 시스템의 배향은 지정된 그리고 컴퓨터-제어되는 궤적에 대응하도록 조정된다. 광 파이프를 포함하는 내부 폐색부를 가진 시스(sheath)가, 타게팅 시스템을 통해 그리고 그 후 포트를 통해 삽입될 수 있다. 상호교환가능한 하나의 또는 소정 범위의 프로브가 시스를 통해 삽입되어, 모든 프로브 및 툴을 포함하여 치료점에 도달할 수 있고, 모든 작업은 (US와 함께 또는 US 없이) 프로브에 채택된 광섬유 가시화 하에 이루어지며, 툴의 위치는 프로브에 국부화 기술의 채택을 통해 실시간으로 추적되고 치료 스크린 상에 디스플레이된다. 프로브의 다양한 부분들의 배향은 컴퓨터 제어 하에 자체적으로 그리고 주변 조직에 대해 상대적으로 수정될 수 있다. 시스는 시술 진행에 따라 프로브를 정확한 위치로 전달하기 위해 필요에 따라 전진할 수 있다. 채택된 기술들 간에 조직 변경 기능을 포함하는 프로브가 표적 볼륨에 삽입될 수 있고, 따라서, 추가적인 포트 및 기기의 필요없이, 그리고 출혈없이, 단일 포트를 통해 조직에 액세스할 수 있고, 조직을 변경시킬 수 있다.
알다시피, 전술한 시스템 및 방법의 하나 이상의 양태들이, 필요에 따라, 조합될 수도 있고, 심지어 생략될 수도 있다.
도 1a는 본 발명의 일 실시예에 따른 시스의 정면도다.
도 1b는 본 발명의 일 실시예에 따른 프로브의 정면도로서, 프로브의 원위 단부가 이미징 및 국부화 기술을 포함한다.
도 1c는 본 발명의 일 실시예에 따른 프로브의 정면도로서, 프로브의 원위 단부는 광학적 및 국부화 기술을 포함한다.
도 1d는 본 발명의 일 실시예에 따른 프로브의 평면도로서, 프로브의 원위 단부는 초음파 국부화 기술을 포함한다.
도 1e는 본 발명의 일 실시예에 따른 프로브의 평면도로서, 프로브의 원위 단부는 광학적 기술을 가진 조직 스프레더를 포함한다.
도 1f는 본 발명의 일 실시예에 따른 프로브의 평면도로서, 프로브의 원위 단부는 생체검사 및 광학적 기술을 포함한다.
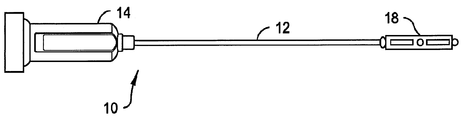
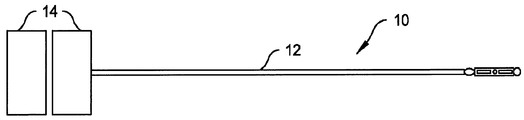
도 1g는 본 발명의 일 실시예에 따른 프로브의 평면도로서, 프로브의 원위 단부는 광학 기술과 함께 고강도 포커싱 초음파와, 초음파 아미징 및 국부화 기술을 포함한다.
도 2는 도 1g에 도시되는 프로브의 확대 정면도다.
도 3a-3d는 본 발명의 실시예에 따른 다양한 구성요소의 정면도다.
도 4A-4B는 본 발명의 일 실시예에 따른 각각 타게팅 장치의 평면도 및 정면도다.
도 4C-E는 본 발명의 다른 실시예에 따른 타게팅 장치의 사시도로서, 타게팅 장치는 다양한 구조로 도시된다.
도 5는 본 발명의 일 실시예에 따른 흐름도다.
도 6은 여기서 개시되는 적어도 소정의 프로세스를 수행하기에 유용한 예시적 컴퓨팅 장치의 개략도다.
도 1b는 본 발명의 일 실시예에 따른 프로브의 정면도로서, 프로브의 원위 단부가 이미징 및 국부화 기술을 포함한다.
도 1c는 본 발명의 일 실시예에 따른 프로브의 정면도로서, 프로브의 원위 단부는 광학적 및 국부화 기술을 포함한다.
도 1d는 본 발명의 일 실시예에 따른 프로브의 평면도로서, 프로브의 원위 단부는 초음파 국부화 기술을 포함한다.
도 1e는 본 발명의 일 실시예에 따른 프로브의 평면도로서, 프로브의 원위 단부는 광학적 기술을 가진 조직 스프레더를 포함한다.
도 1f는 본 발명의 일 실시예에 따른 프로브의 평면도로서, 프로브의 원위 단부는 생체검사 및 광학적 기술을 포함한다.
도 1g는 본 발명의 일 실시예에 따른 프로브의 평면도로서, 프로브의 원위 단부는 광학 기술과 함께 고강도 포커싱 초음파와, 초음파 아미징 및 국부화 기술을 포함한다.
도 2는 도 1g에 도시되는 프로브의 확대 정면도다.
도 3a-3d는 본 발명의 실시예에 따른 다양한 구성요소의 정면도다.
도 4A-4B는 본 발명의 일 실시예에 따른 각각 타게팅 장치의 평면도 및 정면도다.
도 4C-E는 본 발명의 다른 실시예에 따른 타게팅 장치의 사시도로서, 타게팅 장치는 다양한 구조로 도시된다.
도 5는 본 발명의 일 실시예에 따른 흐름도다.
도 6은 여기서 개시되는 적어도 소정의 프로세스를 수행하기에 유용한 예시적 컴퓨팅 장치의 개략도다.
여기서 구체적으로 명시하지 않을 경우, "일", "하나", "이러한"은 하나의 요소로 제한되지 않으며, 대신에 "적어도 하나"로 이해되어야 한다.
본 발명은 비침습적 기술을 이용하여 환자의 표적 볼륨의 적어도 하나의 이미지를 제공하도록 구성된 적어도 하나의 센서를 포함하는, 외과 시술 수행 시스템을 포함한다. 환자를 포함하는 치료실 내에 좌표계가 구축된다. 단일 수술 포트가 표적 볼륨에 인접하여 환자에게 생성된다. 적어도 하나의 프로브가 적어도 부분적으로 단일 수술 포트 내로 삽입되도록 구성된다. 프로브는 샤프트와 그 원위 단부에 적어도 하나의 툴을 포함한다. 샤프트의 근위 단부는 툴의 위치 및 배향 중 적어도 하나를 조작할 수 있도록 적어도 하나의 모터에 연결될 수 있다. 적어도 하나의 컨트롤러는 i) 센서로부터의 적어도 하나의 이미지를 좌표계와 결합시키도록 구성될 수 있고, ii) 표적 영역 액세스 제공을 위해 단일 수술 포트를 생성할 환자 상의 위치를 식별하도록 구성될 수 있으며, iii) 표적 영역 치료를 위해 프로브의 적어도 일부분을 조작할 수 있도록 구성되고, iv) 실시간을 툴을 추적하도록 구성될 수 있으며, 및/또는 v) 스크린 상에서 툴의 위치를 디스플레이하도록 구성될 수 있다.
본 발명은 환자의 적어도 일부분의 수술전 이미지를 취하거나 수신하거나, 획득하는 단계와, 환자의 표적 볼륨에 대한 최적 경로를 식별하는 치료 계획을 수신하는 단계와, 표적 볼륨 도달을 위해 환자 내로 프로브를 삽입하기 위한 최적 배치를 결정하는 단계를 수반할 수 있는 수술 시술 수행 방법을 또한 포함한다. 기존의 또는 장착된 랜드마크가 환자 상에서 식별될 수 있고, 단일 포트가 환자의 지정 위치에 생성된다. 환자 내로 적어도 부분적으로 시스가 삽입될 수 있고, 적어도 하나의 프로브가 시스 내로 적어도 부분적으로 삽입된다. 프로브의 적어도 일부분은 국부화 기술을 포함한다. 프로브의 적어도 하나의 툴을 이용하여 표적 볼륨의 적어도 일부분이 처치된다.
특히, 도 1a-1g에 도시되는 것과 같은 일 실시예에서, 적어도 하나의 또는 일련의 외과용 프로브(10)가 공통 플랫폼에 기초하여 제공될 수 있고, 이미징, 진단, 국부화, 및/또는 조직 변경 기능을 제공하는 소정 범위의 기술들을 포함한다. 적어도 하나의 실시예에서, 각각의 프로브(10)는 적어도 부분적으로 또는 완전하게 강체형(도 3A 참조), 적어도 부분적으로 또는 완전히 관절 연결형(도 3B 참조) 및/또는 적어도 부분적으로 가요성(가령, 가요성 및/또는 탄성 물질 또는 하나 이상의 연동부로 인해)일 수 있는 샤프트(12)를 포함한다. 적어도 2개, 가능하다면 4개 이상의 기술들이 샤프트(12)의 원위 단부에서 배치 또는 이용될 수 있다.
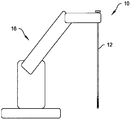
샤프트(12) 또는 적어도 그 일부분이 수동 및/또는 컴퓨터 제어에 의해 조작될 수 있다. 각각의 샤프트(12)의 근위 단부는 샤프트(12)의 근위 및/또는 원위 단부의 위치 및 배향에 영향을 미치도록 설계된 적어도 하나의 또는 한 세트의 모터(14)와 정합하도록 하는 크기, 형상, 및/또는 구성을 가질 수 있다. 모터(14)는 샤프트(12)와 일체형일 수 있고(도 1a-1g 및 3a 참조), 외과용 로봇(16)과 같이(도 3D 참조) 자체적으로 모터(14)를 지니고 있는 메커니즘에 대해, 또는 샤프트(12)에 대해 직접 한 세트의 모터(14)가 그 외부에 위치하여 직접 연결될 수 있다(도 3C 참조). 일 실시예에서, 모터(14)를 이용하여, 근위 및 원위 샤프트(12)의 휨, 근위 및 원위 샤프트의 회전, 원위 및 근위 샤프트(12)의 선형 병진의 모든 또는 일부 조합을 포함한, 샤프트(12)의 근위 단부의 위치 및/또는 배향에 대해 샤프트(12)의 적어도 원위 단부의 위치 및/또는 배향을 독립적으로 제어할 수 있다.
일 실시예에서, 각각의 프로브(10)의 원위 단부의 툴(18)은 조직 해부(dissecting), 조직 스프레딩(spreading), 조직 샘플링, 유체 흡인(fluid aspiration), 조직 흡인(tissure aspriation), 및 조직 세척(tissue irrigation)을 포함한, 그러나 이에 제한되지 않는, 적어도 하나의 구분된 기능(도 1b-1g 참조)을 수행하도록 설계된다. 추가적으로, 각각의 프로브(10)는 이미징, 진단, 국부화, 및 조직 변경을 위해 제공되는 기언급한 적어도 2개의 기술을 포함할 수 있다(도 2 참조). 예를 들어, 도 2에 도시되는 바와 같이, 툴은 국부화(18a), 요법(18b), US 이미징(18c), 및/또는 광학 이미징 광원(18d) 기술을 포함할 수 있다. 조직-내 US 및 광섬유는 각각의 프로브(10) 내에 통합될 수 있다. US는 표적 영역 내부를 가시화시킬 수 있고, 광섬유는 표적 영역의 외부를 가시화시킬 수 있다.
이미징은 조직의 내부 또는 표면의 이미지를 제공하도록 설계된 임의의 수단을 포함한다. 조직 표면의 이미지를 제공하도록 설계된 기술들은 가시 스펙트럼 또는 근적외선 스펙트럼 또는 자외선 스펙트럼과 같은 임의의 파장을 보는데 요구되는 광학계를 포함하지만 이에 제한되지 않으며, 조직에 광을 전송하기 위한 수단과, 사용자에게 조직의 이미지를 다시 전송하기 위한 수단을 포함한다.
조직의 진단 조사를 제공하도록 설계된 기술은, 감마 이미징, 근적외선 광 이미징, x-선, 및 핵자기 공명을 포함하지만, 이에 제한되지 않는다. US 기술은 2-D, 3-D 스캐닝, 호형(annular), 선형(linear), 및 페이즈 어레이(phased array)를 포함하는, 그러나 이에 제한되지 않는, 임의의 설계의 가변 주파수의 트랜스듀서를 포함한다.
조직의 기능을 영구적으로 또는 가역적으로 변경시키는데 사용되는 조직 변경을 제공하도록 또는 조직을 파괴하도록 설계된 기술은 열적 수단, 전기적 수단, 또는, 레이저, RF, 마이크로파, 크리오(cryo), US, IRC(irreversible electrocorpation)와 같은 그외 다른 수단에 의해 조직을 변경시키는데 사용되는 임의의 형태의 기술을 포함할 수 있다. 조직 변경 기술은 세포적 기능 및/또는 해부학적 구조의 영구적 붕괴 또는 세포적 기능 및/또는 해부학적 구조의 일시적 붕괴용으로 사용될 수 있다. 조직 기능의 가역적 변경의 한 예는 암 파괴 약이 세포에 덜 잘 들어올 수 있도록 조직 막 투과성에 영향을 미치거나 이를 개선시키도록 저강도로 포커싱된 초음파를 이용하는 것이다. 조직의 영구 변경의 한 예는 열적 애블레이션(thermal ablation)를 통해 암 세포를 파괴하도록 고강도 포커싱 초음파를 이용하는 것이다.
각자의 프로브(10)가 알려진 기준점에 대해 공간 내에 있는 위치를 추적하는데 사용되는 위치 확인 기술을 가진 하나 이상의 프로브(10)는 광학, 전자기, 및 RF와 같이, 알려진 지점에 대해 3차원 공간에서 물체의 위치를 식별 및/또는 추적하는데 사용되는 임의의 형태의 기술을 포함할 수 있다.
도 1a에 도시되는 바와 같이, 모든 프로브(10)가 통과할 수 있는 단일 외과용 포트를 통해 환자 내로 적어도 부분적으로 단일 시스(20)가 삽입될 수 있다. 많은 종래의 외과적 시술에 반해, 본 실시예의 시술은 단일 외과적 포트를 이용하여서만 수술을 완료할 수 있다. 시스(20)는 시트(20) 내부에서 적어도 부분적으로 또는 심지어 완전하게 끼워맞춰지는 폐색부(예를 들어, 도 1b 참조)를 포함할 수 있다. 폐색부는 앞서 설명한 프로브(10)의 변형이다. 즉, 폐색부(10)는 조직 표면 또는 조직 내부 이미징과, 국부화/추적 기술로부터 적어도 하나를 포함한 기술들 중 적어도 2개를 포함할 수 있다. (아래에서 상세히 설명되는) 치료 계획 시스템에 의해 지시되는 바와 같이 시스(20)를 배치 및 배향함으로써, 프로브(10)는 동일한 또는 실질적으로 동일한 궤적을 따라 모든 브로브(10)의 배향을 유지하면서 상호교환가능하게 시스(20) 내로 적어도 부분적으로 또는 심지어 완전하게 삽입될 수 있고 시스(20)로부터 제거될 수 있다.
본 발명의 위 설명된 실시예는 종래의 단일 포트 외과 시술과는 구분되는데, 왜냐하면, 이러한 공직 기술의 시술이 복수의 툴을 한번에 또는 병렬로 삽입할 수 있도록 포트의 크기를 확대한다. 본 발명의 일 실시예는 외과적 시술 중 더 작은 포트를 이용할 수 있다. 그 결과, 본 실시예는 외과 시술로부터 나타나는 절단, 박기(tearing), 출혈(bleeding), 등을 감소시키고, 환자의 트라우마를 감소시키고 회복 시간을 단축시킨다.
외과 포트 내에 정확하게 시스(20) 및/또는 프로브(10)를 배향시키기 위해, 본 발명의 적어도 하나의 실시예는 타게팅 장치 또는 시스템(30)을 이용한다(도 4A-4E 참조). 도 4A는 타게팅 장치(30)의 평면도다. 도 4B는 대안의 위치에서 타게팅 장치(30)의 적어도 일부분을 가진 타게팅 장치(30)의 측면도다. 도 4C-4E는 타게팅 장치(30)가 허용하는 프로브(10)의 다양한 움직임을 보여주는 타게팅 장치(30)의 사시도다. 적어도 하나의 실시예에서, 타게팅 장치(30)는 환자에 대하여 시스(20) 및/또는 프로브(20)의 다양한 범위의 모션(가령, 상향, 하향, 좌향, 우향, 내향, 외향, 또는 이들의 조합)을 허용 및/또는 가동시킬 수 있다. 타게팅 장치(30)는 모터 또는 다른 형태의 구동 시스템을 통합시킴으로써 수동으로 또는 컴퓨터 제어 하에 궤도를 구축할 수 있다. 예를 들어, 타게팅 장치(30)는 요망 방향으로 프로브 또는 기타 외과 기기를 지향시키도록 신경외과 및 정형외과 분야에 사용되는 것과 유사한 구조를 가질 수 있다.
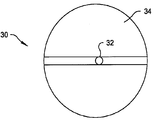
타게팅 장치(30)는 환자에게, 또는, 환자가 놓인 테이블에, 테이블에 인접하여 배치된 지지 구조물에, 및/또는 방 자체에 직접 또는 간접적으로 고정함으로써 환자의 위치에 대해 타게팅 장치(30)의 기저부 또는 플레이트(34)를 고착시키기 위한 고착 수단을 포함할 수 있다. 타게팅 장치(30)는 타게팅 장치(30)에 의해 구축되는 궤적을 따라 타게팅 장치(30)를 통해 적어도 부분적으로 또는 심지어 완전하게 시스(20) 및/또는 프로브(10)를 통과시키기 위한 수단을 포함할 수 있다. 통과 수단은 원형 단면 형상을 가진 튜브(32)일 수 있다. 튜브(32)의 단면적 및/또는 형상은 각각의 프로브(10)의 형상보다 약간만 클 수 있어서, 하나의 프로브(10)만이 한번에 튜브(32) 내로 삽입될 수 있다. 타게팅 장치(30)는 장치의 타게팅 양태의 적절한 배향을 식별하기 위해, 국부화 기술을 또한 채택할 수 있다.
타게팅 장치(30)의, 그리고 타게팅 장치에 삽입된 경우 주어진 프로브(10)의 샤프트(12)의, 다양한 자유도의 컴퓨터 또는 수동 제어 운동은 환자의 단일한 작은 개구부를 통해 삽입되는 프로브(10)의 형상 및/또는 위치를 조정할 수 있고, 프로브의 원위 단부는 조직을 이미징, 진단, 및/또는 잠재적으로 변경하기 위해, 치료 계획 시스템에 의해 결정되는 영역에서 경로를 따라 표적 조직에 전달된다.
도 5에 도시되는 실시예에서, 관심 환자의 영역의 수술전 이미징은, 수술 중 변경 또는 제거를 위해 환자의 일부분(전립선 또는 그 일부분)의 표적 볼륨(크기, 형상, 및/또는 위치)을 식별하는데 사용되는 컴퓨터 및 센서와 같은 치료 계획 시스템 내로 다운로드되는 데이터와 함께 수행, 수신, 및/또는 획득될 수 있다(단계 50). 관심 영역을 변경시키는데 사용될 기술의 알려진 조직 변경 특성에 기초하여 프로브(10)의 적어도 일부분과 함께 환자 내의 표적 볼륨에 도달하기 위한 최적 경로를 결정하기 위해 환자 내로 작은 단일 개구부를 생성하기 전에 이미징이 또한 수행될 수 있다. 일 실시예에서, 이미징은 환자 일부분 상의 또는 그 근처에 센서를 배치함으로써 실현될 수 있다. 센서의 위치는 컴퓨터 제어를 통해 또는 수동으로 조작될 수 있다. 센서는 컴퓨터로부터 이격될 수도 있고, 컴퓨터에 연결될 수도 있다. 치료 계획 프로세스의 일부분은 환자에 대한 합병증을 최소화시키면서 표적 볼륨(가령, 지라 또는 그 일부분)에 도달하기 위해 환자 내로 프로브(10) 삽입을 위한 포트 배치용 최적 위치를 결정하는 단계를 포함할 수 있다(단계 52). 최적 위치가 결정될 때, 그 좌표가 치료 계획 시스템에 저장될 수 있다.
치료 시에, 좌표계는 국부화 기술을 이용하여 치료실에 구축될 수 있다(단계 54). 좌표계는 수술실, 방사선 종양학 스위트(radiation oncology suite), 또는 그 이미지에 대해 사용되는 균일한 기준점을 생성하기 위한 수단일 수 있다. 좌표계는 당 분야에 알려진 임의의 개수의 방식으로 구축될 수 있다. 예를 들어, 최소한 3개의 기준 마커가 이미징 전에 환자 표면(가령, 피부) 상에 배치될 수 있고, 그 위치들은 타투(tatoos)에 의해 마킹된다. 기준 마커는 마커를 참조하는 이미지에 대한 점의 위치와 함께 수술전 이미지 상에서 식별될 수 있다. 치료시, 국부화 프로브를 이용하여, 이미징시 사용되는 기준 시스템을 재구축하기 위해 최소한 3개의 점의 위치를 식별할 수 있다. 대안으로서, 환자 표면 상의 자연 발생 점들이, 예를 들어, 배꼽이, 사용될 수 있다. 추가적으로, 어떤 점없이도 등록이 이루어질 수 있다. 치료시, 국부화와 함께 프로브(10)는, 이미징 데이터로부터 발생된 환자의 윤곽과 퓨징(fusing)될 수 있는 환자의 윤곽을 발생시키기에 충분한 점들을 컴퓨터 시스템이 캡처하는 시간까지, 컴퓨터로 프로브(10) 위치를 연속적으로 레코딩하면서 환자 표면에 걸쳐 추적될 수 있다.
좌표계는 표적 볼륨의 영역을 이미징하는데 사용되는 US와 같은 비침습적 형태의 이미징에 고정될 수 있다(단계 56). 대안으로서, 자체 고유 좌표계를 가진 자기 공명 이미징(MRI)과 같은 시스템이 이미징에 사용될 수 있다. 치료실에서 발생된 이미지는 컴퓨터 또는 컨트롤러에 의해 수술전 이미지와 합성(fusion) 또는 조합되어, 예를 들어, 수술전 이미지에서 결정되는 표적 볼륨의 위치를 치료시 존재하는 룸 좌표계에 등록한다(단계 58). 합성(fusion)은 변형가능한 등록, 고정 등록 등과 같이, 당 분야에 알려진 임의의 개수의 기법들 중 하나 이상에 의해 실현될 수 있다. 국부화 기술을 갖춘 포인터를 이용하여, 예를 들어, 환자 표면 상에서 환자 내로 프로브의 진입을 위한 위치가 식별될 수 있다.
표적 볼륨의 크기, 형상, 및 위치가 식별된 후 및/또는 표적 볼륨 도달을 위한 경로가 식별된 후, 작은 단일 외과용 포트가 환자에 생성 또는 배치될 수 있다(단계 60). 외과의는 손으로 절개를 할 수 있다. 예를 들어, 광 파이프 및 국부화 기술을 포함하는 내부 폐색부를 갖춘 시스(20)는 단일 포트를 통해 적어도 부분적으로 또는 심지어 완전하게 삽입될 수 있다(단계 62). 국부화 기술을 가진 페색부(10)를 장착함으로써, 시스(20)는 치료 계획 시스템에 의해 결정되는 배향과 일치하게 배향될 수 있다. 다시 말해서, 표적 볼륨으로의 요망 경로가 구축되면 및/또는 수술 전에 정밀하게 매핑되면, 프로브(10)의 적어도 원위 단부의 위치가 알려져 있고 광학적으로 및/또는 US로 볼 수 있기 때문에, 수술 중 경로가 구현 또는 이어질 수 있다. 수술 중, 본 발명은 수술 수행을 위해, 외과의 또는 조작자가 예를 들어, 컴퓨터 키보드, 터치 스크린, 및/또는 컴퓨터 마우스를 조작할 수 있게 한다.
다시 말해서, 적어도 하나의 실시예에서, 시스템은 최적 포트 배치의 위치를 결정할 수 있다. 국부화 기술을 이용하여 환자에 이 점을 환자 상에서 이 점을 위치시킬 수 있다. 특히, 표적의 위치와, 경로에 존재할 수 있는 임의의 장애물이 주어졌을 때, 컴퓨터에 의해 최적으로 결정되는 점에 대응하는 것으로 시스템이 식별할 때까지, 국부화 기능의 프로브(10)가 환자의 표면 주위로 이동할 수 있다. 그 후 외과의는 이 지점에서 절개를 행할 수 있다.
소정 범위의 프로브(10)들 - 각각이 구체적 기능을 수행하고, 각각이 이미징, 진단, 국부화, 촉각 피드백, 및/또는 조직 변경 기능을 포함하는 리스트로부터 적어도 2개의 기술을 갖춤 - 은 시스(20)를 통해 직렬로 또는 상호교환가능하게 삽입될 수 있고, 따라서, 치료 볼륨을 향해 각각의 프로브(10)를 지향시킬 수 있다(단계 64). 프로브(10)의 위치는 실시간으로 추적될 수 있고, 각각의 프로브(10) 내로 국부화 기술의 통합으로 인해, 컴퓨터 모니터와 같은 치료 계획 스크린 상에 디스플레이될 수 있다. 이와 같이 장착된 프로브(10)들에 의해 발생되는 광학 및 US 이미지는 역시 치료 계획 스크린 상에 디스플레이될 수 있다(단계 66, 68). 환자의 표적 볼륨에 프로브(10)의 적어도 일부분과, 이렇게 하도록 설계된 프로브(10)를 이용하여 준비된 영역이 도달한 경우(단계 70), 치료 볼륨의 이미징이 적절히 장비된 프로브(10)를 이용하여 반복될 수 있고(단계 72), 치료 계획은 기존 해부학 구조를 이용하여 업데이트될 수 있고, 통합된 기술들 사이에서 영구적 또는 가역적 조직 변경 기능을 포함하는 조직 변경 프로브(10)가 표적 볼륨에 전달되어, 추가적인 포트 및 기기의 필요없이 그리고 출혈없이, 광학 및/또는 US 이미징 하에 작은 단일 포트를 통해 조직에 액세스하고 조직을 변경시킬 수 있다(단계 74).
본 발명의 추가 실시예에서, 수동 또는 동력화된(motorized) 타게팅 시스템(30)이, 환자에게 형성된 포트를 통해 적어도 부분적으로 또는 완전하게 장착될 수 있고, 지정된 궤도를 따라 그리고 동력화된 시스템의 경우에 컴퓨터 제어 궤적을 따라 시스(20) 및/또는 프로브(10)의 배향을 조정 및/또는 관리하는데 사용될 수 있다. 예를 들어, 관절 연결 또는 휨가능 샤프트(12)를 갖춘 프로브(10)를 이용할 때, 컴퓨터는, 온보드 국부화 시스템을 통해 프로브(10)의 원위 단부의 적어도 일부분의 위치를 파악함으로써, 환자 내의 또는 환자 근처의 요망 위치로 프로브(10)의 원위 단부의 적어도 일부분을 데려오기 위해 프로브(10)의 각각의 형태의 위치를 조정할 수 있다. 프로브(10)의 원위 단부의 적어도 일부분이 이동하여 새 위치를 레코딩 및/또는 저장함을 인지하는, 그리고, 외과적 시술 수행에 필요한 위치 또는 요망 위치에 프로브(10)를 위치시키도록 프로브(10)의 원위 단부의 적어도 일부분을 이동시킬 위치를 결정하는, 피드백 루프가 구축될 수 있다. 따라서, 각각의 외과용 툴의 위치가 시술 과정 중 연속적으로 추적될 수 있어서, 그 위치가 수술전 MRI/CT에 대해 알려지고 업데이트되게 된다.
본 발명의 추가 실시예에 따른 작동 수단에서, 주변 조직 및 그 자체에 대한 각 프로브(10)의 다양한 부분의 배향은 코너 주위와 같이 더 넓은 범위의 위치에 도달하기 위해, 프로브(10)의 적어도 일부분의 형상을 변화시키도록 컴퓨터 제어 하에 수정될 수 있다.
여기서 설명되는 기술의 주된 이점은 외과용 칼의 이용을 감소시키거나 심지어 제거할 수 있다는 점이다. 현재의 외과 시술에서, 칼을 다룰 필요성은, 닫힌 해부학적 격실 내에 이러한 공간을 생성하도록 흡입 기술의 이용을 일반적으로 요구하는 치료될 영역의 폭넓은 노출을 일반적으로 필요로한다. 출혈은 칼 이용시의 보편적 결과이고, 이는 다시 환자 내에 위치하는 추가적인 포트를 통해 추가적인 외과의에 의해 이용되는 추가적인 기기들의 이용과, 훨씬 더한 노출 제어를 필요로한다. 일반적으로, 모든 이러한 처치는 광학적 관찰 하에 이루어져야만 하며, 이는 영역의 가시화에 사용되는 광원 및 광섬유 카메라를 위한 추가적인 포트의 배치를 필요로한다.
칼이 표적 조직 제거에 사용되지 않을 때, 폭넓은 외과적 노출의 주 원인과, 출혈의 주 원인이 대체로 제거되며, 따라서, 한번에 하나보다 많은 기기의 필요성, 따라서, 포트의 수, 그리고 합계하여 시술 수행에 걸리는 시간을 감소시킬 수 있다. 표적까지의 경로가 수술 이전에 결정될 때, 경로는 처치로부터 나타나는 부작용을 최소화시키도록 최적화될 수 있다. 각 외과 툴의 위치가 시술 과정 중 추적될 때, 지정된 최적화 경로에 대한 시술 상태가 평가될 수 있고, 필요할 경우 교정이 이루어질 수 있다.
상술한 기술 및/또는 실시예들 중 하나 이상이 하나 이상의 컴퓨팅 장치(210) 상에서 실행되는 소프트웨어(예를 들어, 모듈)을 이용하여 구현될 수 있고, 또는 이를 수반할 수 있다. 물론, 여기서 설명되는 모듈은 다양한 기능을 예시하며, 임의의 실시예의 구조 또는 기능을 제한하지 않는다. 대신에, 다양한 모듈의 기능이 서로 다르게 나누어질 수 있고, 다양한 설계 고려사항에 따라 더 많은 또는 더 적은 모듈에 의해 수행될 수 있다.
각각의 컴퓨팅 장치(210)는 하나 이상의 저장 장치(213) 상에 비-일시적 방식으로 저장되는, 예를 들어, 컴퓨터 판독가능 명령어(즉, 코드)와 같은, 명령어를 처리하도록 설계된 하나 이상의 프로세싱 장치(211)를 포함할 수 있다. 명령어를 처리함으로써, 프로세싱 장치(211)는 여기서 개시되는 단계 및/또는 기능들 중 하나 이상을 수행할 수 있다. 멀티-프로세싱 환경에서, 복수의 프로세싱 유닛이 프로세싱 전력 증가를 위한 컴퓨터-실행가능 명령어를 실행할 수 있다. 저장 장치(213)는 임의의 유형의 비-일시적 저장 장치(가령, 광학 저장 장치, 자기 저장 장치, 고상 저장 장치, 등)일 수 있다. 저장 장치(213)는 제거가능형 또는 제거불가능형일 수 있고, 자기 디스크, 자기-광학 디스크, 자기 테이프 또는 카세트, CD-ROM, CD-RW, DVD, BD, SSD, 또는, 정보 저장에 사용될 수 있는 그외 다른 매체를 포함할 수 있다. 대안으로서, 명령어가 하나 이상의 원격 저장 장치, 예를 들어, 네트워크 또는 인터넷을 통해 액세스되는 저장 장치에 저장될 수 있다.
각각의 컴퓨팅 장치(210)는 메모리(212), 하나 이상의 입력 컨트롤러(216), 하나 이상의 출력 컨트롤러(215), 및/또는 하나 이상의 통신 연결부(240)를 추가로 가질 수 있다. 메모리(212)는 휘발성 메모리(가령, 레지스터, 캐시, RAM, 등), 비휘발성 메모리(가령, ROM, EEPROM, 플래시 메모리, 등), 또는 이들의 소정의 조합일 수 있다. 적어도 하나의 실시예에서, 메모리(212)는 설명되는 기술을 구현하는 소프트웨어를 저장할 수 있다.
버스, 컨트롤러, 또는 네트워크와 같은, 상호연결 메커니즘(214)은 프로세서(211), 메모리(212), 저장 장치(213), 입력 컨트롤러(216), 출력 컨트롤러(215), 통신 연결부(240), 및 그외 다른 장치(가령, 네트워크 컨트롤러, 사운드 컨트롤러, 등)를 포함한, 컴퓨팅 장치(210)의 구성요소들을 연결시킬 수 있다. 출력 컨트롤러(215)는 출력 컨트롤러(215)가 (모듈 실행에 응답하여) 디스플레이 장치(220) 상에 디스플레이를 변환할 수 있도록 하는 방식으로 하나 이상의 출력 장치(220)(가령, 모니터, 텔레비전, 모바일 장치 스크린, 터치-디스플레이, 프린터, 스피커, 등)에 (가령, 유선 또는 무선 연결을 통해) 연결될 수 있다. 입력 컨트롤러(216)는 사용자로부터 입력을 수신할 수 있도록 하는 방식으로 입력 장치(230)(가령, 마우스, 키보드, 터치-패드, 스크롤-볼, 터치-디스플레이, 펜, 게임 컨트롤러, 음성 입력 장치, 스캐닝 장치, 디지털 카메라, 등)에 (가령, 유선 또는 무선 연결을 통해) 연결될 수 있다.
통신 연결부(240)는 통신 매체를 통해 다른 통신 실체에 통신할 수 있다. 통신 매체는 컴퓨터-실행가능 명령어, 오디오 또는 비디오 정보, 또는 다른 데이터와 같은 정보를 변조 데이터 신호로 운반한다. 변조 데이터 신호는 신호에 정보를 인코딩하는 방식으로 설정 또는 변경된 특성들 중 하나 이상을 가진 신호다. 예를 들어, 그리로 제한없이, 통신 매체는 전기, 광학, RF, 적외선, 음향, 또는 다른 반송파로 구현될 수 있는 무선 또는 유선 기술을 포함한다.
도 6은 단지 용이한 식별을 위해 별개의 장치로 컴퓨팅 장치(210), 출력 장치(220), 입력 장치(230)를 도시하고 있다. 그러나, 컴퓨팅 장치(210), 디스플레이 장치(220), 및/또는 입력 장치(230)가 별개의 장치일 수도 있고(가령, 유선으로 모니터 및 마우스에 연결되는 개인용 컴퓨터), 단일 장치에 통합될 수도 있으며(가령, 스마트폰 또는 태블릿과 같은 터치-디스플레이를 구비한 모바일 장치), 또는 장치들의 임의의 조합일 수 있다(가령, 터치-스크린 디스플레이에 연결된 하나의 컴퓨팅 장치, 단일 디스플레이 장치 및 입력 장치에 부착된 복수의 컴퓨팅 장치, 등).
따라서, 본 발명은 앞서 언급된 목표 및 장점들 및 여기에 내재된 특성을 얻도록 적합하게 구성된다. 수많은 변경이 당 업자에 의해 이루어질 수 있으나, 이러한 변경들은 첨부 청구범위에 의해 부분적으로 제시되는 발명의 범위 내에 포함된다.
Claims (18)
- 외과 시술 수행 시스템에 있어서, 상기 시스템은,
환자 상에 배치되는 또는 식별되는 최소한 3개의 기준 마커에 의해 구축되는 좌표계 - 상기 좌표계는 외과 시술용 균일 기준점을 생성하도록 구성됨 - 와,
표적 볼륨에 인접한 위치에서 환자에 생성된 단일 외과 포트와,
상기 단일 외과 포트 내로 적어도 부분적으로 삽입되도록 구성되는 적어도 하나의 프로브 - 상기 프로브는 하나의 샤프트와 적어도 하나의 툴을 그 원위 단부에 포함하고, 상기 적어도 하나의 툴은 i) 비침습적 기술을 이용하여 환자의 표적 볼륨의 적어도 하나의 이미지를 제공하도록 구성되는 적어도 하나의 센서와, ii) 조직 변경, 촉각 피드백, 및 위치 확인으로 구성되는 그룹으로부터 선택되는 적어도 하나의 기술을 포함하며, 상기 샤프트의 근위 단부는 상기 툴의 위치 및 배향 중 적어도 하나를 조작하도록 적어도 하나의 모터에 연결됨 - 와,
i) 외과 시술 개시 전에, 상기 적어도 하나의 이미지를 치료 계획의 일부분으로 좌표계와 통합하도록 구성되고, ii) 표적 볼륨에 대한 액세스를 제공하도록 단일 외과 포트를 생성하기 위한 환자 상의 위치를 식별하도록 구성되며, iii) 치료 계획이 지시에 따라 표적 볼륨을 처리하도록 프로브의 적어도 일부분을 조장하도록 구성되고, iv) 툴을 실시간으로 추적하도록 구성되며, v) 스크린 상에 툴의 위치를 디스플레이하도록 구성되는, 적어도 하나의 컨트롤러를 포함하는
외과 시술 수행 시스템. - 제 1 항에 있어서,
상기 적어도 하나의 프로브는 일련의 상호교환가능한 프로브를 포함하고, 프로브 중 적어도 2개는 차례로 단일 외과 포트 내로 적어도 부분적으로 삽입되는
외과 시술 수행 시스템. - 제 2 항에 있어서,
프로브 삽입 이전에 상기 포트 내로 적어도 부분적으로 삽입되는 적어도 하나의 시스(sheath)를 더 포함하며,
상기 시스의 위치 및 배향은, 동일한 또는 실질적으로 동일한 궤적을 따라 포트 내외로 모든 프로브의 요망 배향을 유지하면서, 시스로부터 프로브를 삽입 및 제거할 수 있도록, 치료 계획 시스템에 의해 결정되는
외과 시술 수행 시스템. - 제 1 항에 있어서,
상기 적어도 하나의 프로브는 (i) 알려진 기준점에 대하여 프로브의 적어도 일부분을 추적하는데 사용되는 위치 확인 기술과, (ii) 이미징 기술을 포함하는
외과 시술 수행 시스템. - 제 4 항에 있어서,
프로브의 상기 위치 확인 기술은 각각의 기준 마커의 위치를 식별하도록 구성되는
외과 시술 수행 시스템. - 제 4 항에 있어서,
프로브가 포트 내로 삽입될 때 이미징 기술에 의해 생성되는 이미지는 센서에 의해 제공되는 적어도 하나의 이미지에 합성(fused)되어, 적어도 하나의 이미지에서 결정되는 바에 따라 표적 볼륨의 위치를 좌표계에 등록하는
외과 시술 수행 시스템. - 제 1 항에 있어서,
단일 외과 포트를 통해 적어도 부분적으로 장착되는 타게팅 시스템을 더 포함하며,
상기 타게팅 시스템은 기저부와, 상기 기저부의 기하 중심으로부터 상향으로 연장되는 튜브를 포함하며, 상기 기저부는 환자에 대해 고정되어 유지되고, 상기 튜브는 상기 기저부에 대해 피봇가능하고, 내부에 프로브를 수용하도록 구성되며, 상기 프로브는 상기 기저부를 통해 상기 포트 내로 삽입되는
외과 시술 수행 시스템. - 제 7 항에 있어서,
상기 튜브가 상기 기저부를 향해 그리고 상기 기저부로부터 멀리 이동가능한
외과 시술 수행 시스템. - 제 1 항에 있어서,
상기 프로브는 근위 단부에 적어도 하나의 모터를 포함하고, 상기 모터는 상기 프로브의 원위 단부에서 상기 툴과, 상기 툴의 샤프트 중 적어도 하나의 작동을 제어하도록 구성되는
외과 시술 수행 시스템. - 외과 시술 수행 방법에 있어서, 상기 방법은,
환자의 적어도 일부분의 수술전 이미지를 수신 또는 획득하는 단계와,
환자의 표적 볼륨으로의 최적 경로를 식별하는 치료 계획을 수신하는 단계와,
표적 볼륨에 이르도록 환자 내로 프로브 삽입을 위한 최적 배치를 결정하는 단계와,
환자에 대한 기존 또는 장착된 랜드마크(landmark)를 식별하는 단계와,
환자의 지정된 위치에서 단일 포트를 생성하는 단계와,
단일 포트를 통해 적어도 부분적으로 타게팅 시스템을 배치하는 단계 - 상기 타게팅 시스템은 기저부와, 기저부로부터 상향으로 연장되는 튜브를 포함하고, 상기 튜브는 상기 기저부에 대해 피봇가능함 - 와,
시스를 적어도 부분적으로 상기 튜브 내로, 기저부를 통해, 그리고 상기 포트 내로 그리고 환자 내로 삽입하는 단계와,
제 1 프로브를 적어도 부분적으로 상기 튜브 내로, 상기 기저부를 통해, 그리고 상기 시스 내로 삽입하는 단계 - 상기 프로브의 적어도 일부분은 국부화 기술을 포함함 - 와,
상기 시스, 기저부, 및 튜브로부터 상기 제 1 프로브를 제거하는 단계와,
제 2 프로브를 상기 튜브 내로, 상기 기저부를 통해, 그리고 상기 시스 내로 삽입하는 단계 - 상기 제 2 프로브는 상기 제 1 프로브와 함께 포함되지 않은 적어도 하나의 기술을 포함함 - 와,
프로브의 적어도 하나의 툴을 이용함으로써 상기 표적 볼륨의 적어도 일부분을 치료하는 단계를 포함하는
외과 시술 수행 방법. - 제 10 항에 있어서,
상기 시스는 치료 계획에 의해 결정되는 방향으로 환자 내로 삽입되는
외과 시술 수행 방법. - 제 10 항에 있어서,
표적 볼륨에 이르도록 환자 내로 프로브 삽입을 위한 최적 배치를 결정하기 전에, 룸 좌표계를 구축하는, 알려진 고정 랜드마크에 대해 국부화된 비침습적 형태의 수술 이미징을 수행하는 단계를 더 포함하는
외과 시술 수행 방법. - 제 12 항에 있어서,
룸 좌표계에 상기 표적 볼륨을 등록하도록 수술 이미지를 수술전 이미지와 합성(fusing)하는 단계를 더 포함하는
외과 시술 수행 방법. - 제 10 항에 있어서,
프로브는 이미징 기술을 포함하고, 프로브에 의해 획득되는 하나 이상의 이미지는 환자 외부에 위치한 치료 스크린 상에 디스플레이되는
외과 시술 수행 방법. - 제 14 항에 있어서,
컴퓨터 키보드, 터치 스크린, 및 컴퓨터 마우스 중 적어도 하나를 이용하여, 외과의가 프로브를 조작할 수 있고, 프로브는 국부화 기술을 통해 실시간으로 추적되는
외과 시술 수행 방법. - 제 1 항에 있어서,
상기 적어도 하나의 센서는 표적 볼륨의 내부를 가시화시키기 위해 조직-내 초음파를 포함하고, 상기 적어도 하나의 센서는 표적 볼륨 외부를 가시화시키기 위해 광섬유를 포함하는
외과 시술 수행 방법. - 제 1 항에 있어서,
상기 적어도 하나의 프로브는 제 1 프로브 및 제 2 프로브를 포함하고, 상기 제 1 프로브는 상기 제 2 프로브와는 구분된 적어도 하나의 기술을 포함하고, 상기 단일 외과 포트의 크기는 상기 제 1 및 제 2 프로브를 내부에 병렬로 삽입할 수 없는 크기인
외과 시술 수행 방법. - 제 1 항에 있어서,
치료 계획은 상기 단일 외과 포트를 생성하도록 환자 상의 위치를 식별하는
외과 시술 수행 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361889863P | 2013-10-11 | 2013-10-11 | |
| US61/889,863 | 2013-10-11 | ||
| PCT/US2014/060066 WO2015054592A1 (en) | 2013-10-11 | 2014-10-10 | System for and method of performing sonasurgery |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20160068922A true KR20160068922A (ko) | 2016-06-15 |
Family
ID=52813667
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020167012318A KR20160068922A (ko) | 2013-10-11 | 2014-10-10 | 소나서저리 수행 시스템 및 방법 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10111716B2 (ko) |
| EP (1) | EP3054858A4 (ko) |
| JP (1) | JP2016538014A (ko) |
| KR (1) | KR20160068922A (ko) |
| CN (1) | CN106061401B (ko) |
| WO (1) | WO2015054592A1 (ko) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9974983B2 (en) | 2015-11-12 | 2018-05-22 | SonaCare Medical, LLC | Tissue stabilization for therapeutic ultrasound |
| US10300308B2 (en) | 2016-09-23 | 2019-05-28 | SonaCare Medical, LLC | System, apparatus and method for high-intensity focused ultrasound (HIFU) and/or ultrasound delivery while protecting critical structures |
| WO2021235675A1 (ko) * | 2020-05-18 | 2021-11-25 | 사회복지법인 삼성생명공익재단 | 삽입 전극의 제어 방법 및 이를 이용한 제어 장치 |
| US11260249B2 (en) | 2018-07-19 | 2022-03-01 | Sonablate Corp. | System, apparatus and method for high intensity focused ultrasound and tissue healing activation |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018112270A1 (en) * | 2016-12-14 | 2018-06-21 | SonaCare Medical, LLC | Bolus assembly and ultrasound probe assembly for use with and/or including same |
| GB2577719B (en) * | 2018-10-03 | 2023-04-26 | Cmr Surgical Ltd | Navigational aid |
| JP7182127B2 (ja) * | 2018-10-11 | 2022-12-02 | ザイオソフト株式会社 | ロボット手術支援装置、情報出力方法、及びプログラム |
| US20200178941A1 (en) * | 2018-12-07 | 2020-06-11 | General Electric Company | Ultrasound probe and method of making the same |
| CN111281495B (zh) * | 2019-08-12 | 2021-06-18 | 南京医科大学附属逸夫医院 | 一种超声引导穿刺、神经阻滞辅助定位装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1998038908A1 (en) | 1997-03-03 | 1998-09-11 | Schneider Medical Technologies, Inc. | Imaging device and method |
| US6298262B1 (en) * | 1998-04-21 | 2001-10-02 | Neutar, Llc | Instrument guidance for stereotactic surgery |
| US6301495B1 (en) * | 1999-04-27 | 2001-10-09 | International Business Machines Corporation | System and method for intra-operative, image-based, interactive verification of a pre-operative surgical plan |
| CN2857869Y (zh) * | 2005-12-08 | 2007-01-17 | 上海天算计算机技术有限公司 | 基于局部解剖结构特征的术中实时导航装置 |
| US8419717B2 (en) * | 2006-06-13 | 2013-04-16 | Intuitive Surgical Operations, Inc. | Control system configured to compensate for non-ideal actuator-to-joint linkage characteristics in a medical robotic system |
| US8233963B2 (en) * | 2007-02-19 | 2012-07-31 | Medtronic Navigation, Inc. | Automatic identification of tracked surgical devices using an electromagnetic localization system |
| DE102010029275A1 (de) * | 2010-05-25 | 2011-12-01 | Siemens Aktiengesellschaft | Verfahren zum Bewegen eines Instrumentenarms eines Laparoskopierobotors in einer vorgebbare Relativlage zu einem Trokar |
| CA2822287C (en) * | 2010-12-22 | 2020-06-30 | Viewray Incorporated | System and method for image guidance during medical procedures |
| US20120226145A1 (en) | 2011-03-03 | 2012-09-06 | National University Of Singapore | Transcutaneous robot-assisted ablation-device insertion navigation system |
| RU2014127125A (ru) * | 2011-12-03 | 2016-01-27 | Конинклейке Филипс Н.В. | Определение местоположения точки введения хирургического инструмента |
| US9014851B2 (en) | 2013-03-15 | 2015-04-21 | Hansen Medical, Inc. | Systems and methods for tracking robotically controlled medical instruments |
-
2014
- 2014-10-10 CN CN201480067377.7A patent/CN106061401B/zh active Active
- 2014-10-10 WO PCT/US2014/060066 patent/WO2015054592A1/en active Application Filing
- 2014-10-10 EP EP14852021.6A patent/EP3054858A4/en not_active Withdrawn
- 2014-10-10 JP JP2016521644A patent/JP2016538014A/ja active Pending
- 2014-10-10 US US15/027,048 patent/US10111716B2/en active Active
- 2014-10-10 KR KR1020167012318A patent/KR20160068922A/ko not_active Application Discontinuation
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9974983B2 (en) | 2015-11-12 | 2018-05-22 | SonaCare Medical, LLC | Tissue stabilization for therapeutic ultrasound |
| US10300308B2 (en) | 2016-09-23 | 2019-05-28 | SonaCare Medical, LLC | System, apparatus and method for high-intensity focused ultrasound (HIFU) and/or ultrasound delivery while protecting critical structures |
| US11260249B2 (en) | 2018-07-19 | 2022-03-01 | Sonablate Corp. | System, apparatus and method for high intensity focused ultrasound and tissue healing activation |
| WO2021235675A1 (ko) * | 2020-05-18 | 2021-11-25 | 사회복지법인 삼성생명공익재단 | 삽입 전극의 제어 방법 및 이를 이용한 제어 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3054858A1 (en) | 2016-08-17 |
| US20160235484A1 (en) | 2016-08-18 |
| CN106061401B (zh) | 2019-07-02 |
| WO2015054592A1 (en) | 2015-04-16 |
| JP2016538014A (ja) | 2016-12-08 |
| US10111716B2 (en) | 2018-10-30 |
| CN106061401A (zh) | 2016-10-26 |
| EP3054858A4 (en) | 2017-08-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11984219B2 (en) | Operating room devices, methods, and systems | |
| KR20160068922A (ko) | 소나서저리 수행 시스템 및 방법 | |
| KR102676381B1 (ko) | 경피적 수술을 위한 방법 | |
| CN103417299B (zh) | 用于计划和导航的系统和方法 | |
| CN106606374B (zh) | 用于消融手术的计划系统和导航系统 | |
| US20210186615A1 (en) | Multi-arm robotic system for spine surgery with imaging guidance | |
| Ginoya et al. | A historical review of medical robotic platforms | |
| JP2015528713A (ja) | 手術ロボットプラットフォーム | |
| JP2023517204A (ja) | 低侵襲性組織破砕システムおよび方法 | |
| US20220008035A1 (en) | Autonomous ultrasound guided endoscope | |
| US20220096183A1 (en) | Haptic feedback for aligning robotic arms | |
| WO2022064369A1 (en) | Haptic feedback for aligning robotic arms | |
| US20220061941A1 (en) | Robotic collision boundary determination | |
| US20240127399A1 (en) | Visualization adjustments for instrument roll | |
| US20240138808A1 (en) | Fiducial systems for probe tracking and identification | |
| US20240024047A1 (en) | Systems for retracting and adjusting elongate flexible devices and associated methods | |
| WO2022049491A1 (en) | Robotic collision boundary determination |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |