KR20140079090A - 레이저 방출기 모듈 및 그것이 적용된 레이저 감지 시스템 - Google Patents
레이저 방출기 모듈 및 그것이 적용된 레이저 감지 시스템 Download PDFInfo
- Publication number
- KR20140079090A KR20140079090A KR1020120148672A KR20120148672A KR20140079090A KR 20140079090 A KR20140079090 A KR 20140079090A KR 1020120148672 A KR1020120148672 A KR 1020120148672A KR 20120148672 A KR20120148672 A KR 20120148672A KR 20140079090 A KR20140079090 A KR 20140079090A
- Authority
- KR
- South Korea
- Prior art keywords
- laser
- output
- laser beam
- beams
- laser beams
- Prior art date
Links
Images









Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/005—Optical components external to the laser cavity, specially adapted therefor, e.g. for homogenisation or merging of the beams or for manipulating laser pulses, e.g. pulse shaping
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/04—Systems determining the presence of a target
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4814—Constructional features, e.g. arrangements of optical elements of transmitters alone
- G01S7/4815—Constructional features, e.g. arrangements of optical elements of transmitters alone using multiple transmitters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4816—Constructional features, e.g. arrangements of optical elements of receivers alone
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/484—Transmitters
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/09—Beam shaping, e.g. changing the cross-sectional area, not otherwise provided for
- G02B27/0938—Using specific optical elements
- G02B27/0994—Fibers, light pipes
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S3/00—Lasers, i.e. devices using stimulated emission of electromagnetic radiation in the infrared, visible or ultraviolet wave range
- H01S3/10—Controlling the intensity, frequency, phase, polarisation or direction of the emitted radiation, e.g. switching, gating, modulating or demodulating
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S3/00—Lasers, i.e. devices using stimulated emission of electromagnetic radiation in the infrared, visible or ultraviolet wave range
- H01S3/10—Controlling the intensity, frequency, phase, polarisation or direction of the emitted radiation, e.g. switching, gating, modulating or demodulating
- H01S3/13—Stabilisation of laser output parameters, e.g. frequency or amplitude
- H01S3/1305—Feedback control systems
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S3/00—Lasers, i.e. devices using stimulated emission of electromagnetic radiation in the infrared, visible or ultraviolet wave range
- H01S3/23—Arrangements of two or more lasers not provided for in groups H01S3/02 - H01S3/22, e.g. tandem arrangements of separate active media
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/06—Arrangements for controlling the laser output parameters, e.g. by operating on the active medium
- H01S5/062—Arrangements for controlling the laser output parameters, e.g. by operating on the active medium by varying the potential of the electrodes
- H01S5/06209—Arrangements for controlling the laser output parameters, e.g. by operating on the active medium by varying the potential of the electrodes in single-section lasers
- H01S5/06216—Pulse modulation or generation
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/40—Arrangement of two or more semiconductor lasers, not provided for in groups H01S5/02 - H01S5/30
- H01S5/4025—Array arrangements, e.g. constituted by discrete laser diodes or laser bar
- H01S5/4087—Array arrangements, e.g. constituted by discrete laser diodes or laser bar emitting more than one wavelength
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Electromagnetism (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Optics & Photonics (AREA)
- Plasma & Fusion (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Automation & Control Theory (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
본 발명에 따른 레이저 방출기 모듈은 제 1 입력 레이저빔을 수신하여 제 1 방사각을 갖는 제 1 레이저빔을 출력하는 제 1 레이저 방출기 및 제 1 입력 레이저빔의 파장과 다른 파장을 갖는 제 2 입력 레이저빔을 수신하여 제 1 방사각과 다른 제 2 방사각을 갖는 제 2 레이저빔을 출력하는 제 2 레이저 방출기를 포함하고, 제 1 및 제 2 레이저 방출기들은 상기 제 1 및 제 2 레이저빔들을 함께 출력한다.
Description
본 발명은 레이저 감지 시스템에 관한 것으로 더욱 상세하게는 서로 다른 방사각을 갖는 복수의 레이저빔들을 주사하는 레이저 방출 모듈 및 그것이 적용된 레이저 감지 시스템에 관한 것이다.
자동차 산업이 발달함에 따라, 무인 운전 시스템과 같은 사용자 지원 시스템들이 각광받고 있다. 사용자는 사용자 지원 시스템을 사용하여, 편리하게 작업을 수행할 수 있다. 또한, 사용자 지원 시스템을 사용하면 향상된 안정성이 제공된다. 특히, 무인 운전, 무인 로봇과 같은 무인 지원 시스템들은 사용자의 제어에 의지하지 않고 공간 이동 및 작업을 지원할 수 있는 시스템들이다.
이러한 무인 지원 시스템들은 사용자의 인지기능을 대체하기 위하여 센서들(sensor)을 사용한다. 예를 들어, 공간 영상 및 공간 거리를 감지하기 위하여 레이저 감지 센서(Lidar)가 제공되고 있다. 특히, 무인 운전 시스템에서 사용되는 레이저 감지 센서들은 주변의 조명 환경에 영향을 받지 않고 원거리 물체의 거리 정보, 영상 정보 등을 획득할 수 있다.
그러나, 이러한 레이저 감지 센서들은 고정된 시야각(field of view) 및 각 분해능(angle resolution)을 갖는다. 따라서, 레이저 감지 센서들은 검출 거리에 따라 검출 가능한 물체의 크기 및 정확도가 다르다. 따라서, 감지 거리범위에 따라 충분한 시야각 또는 각 분해능을 확보하기 위하여 복수의 레이저 감지 센서들이 사용이 요구된다. 또한, 광시야각에서 충분한 각 분해능을 위하여 레이저 스캐너(laser scanner)는 다수의 레이저와 포토 다이오드를 사용한다. 또한, 후레쉬 라이다(Flash Lidar)는 높은 수의 포토 다이오드 어레이 픽셀이 필요로 한다. 이러한 제한사항들과 함께 감지 거리에 따라 필요로 하는 시야각을 확보하기 위하여 서로 다른 광학계가 적용되므로, 종래의 기술을 기반으로 복수의 시야각을 지원하는 레이저 감지 센서 모듈의 제작할 경우 소형화가 어렵고, 고비용의 단점을 갖는다.
본 발명의 목적은 장거리 또는 단거리에 위치한 관측 대상의 감지에 사용되는 레이저 방출기 모듈 및 그것이 적용된 레이저 감지 시스템을 제공하는데 있다.
본 발명의 실시 예에 따른 레이저 방출기 모듈은 제 1 입력 레이저빔을 수신하여 제 1 방사각을 갖는 제 1 레이저빔을 출력하는 제 1 레이저 방출기 및 상기 제 1 입력 레이저빔의 파장과 다른 파장을 갖는 제 2 입력 레이저빔을 수신하여 상기 제 1 방사각과 다른 제 2 방사각을 갖는 제 2 레이저빔을 출력하는 제 2 레이저 방출기를 포함하고, 상기 제 1 및 제 2 레이저 방출기들은 상기 제 1 및 제 2 레이저빔들을 함께 출력한다.
실시 예로서, 상기 제 1 및 제 2 레이저 방출기들의 출력단들은 서로 다른 곡률반경을 갖는다.
실시 예로서, 상기 제 1 및 제 2 레이저 방출기들의 출력단들의 곡률반경이 커질수록 상기 제 1 및 제 2 레이저빔들의 제 1 및 제 2 방사각들이 커진다.
실시 예로서, 상기 제 1 및 제 2 레이저 방출기들은 서로 다른 구조의 도파로들을 포함하고, 상기 도파로의 구조에 따라 상기 제 1 및 제 2 방사각의 크기가 제어된다.
실시 예로서, 상기 제 1 및 제 2 레이저 방출기들에 포함된 도파로들의 출력단의 크기가 커질수록 상기 제 1 및 제 2 방사각들의 크기가 작아진다.
실시 예로서, 상기 제 1 및 제 2 레이저 방출기들의 레이저 주사 방향이 서로 다르다.
실시 예로서, 상기 제 1 및 제 2 방사각들과 다른 제 3 내지 제 n 방사각들을 갖는 제 3 내지 제 n 레이저빔들을 출력하는 제 3 내지 제 n 레이저 방출기들을 더 포함한다.
본 발명의 다른 실시 예에 따른 레이저 감시 시스템은 제 1 방사각을 갖는 제 1 출력 레이저빔 및 제 2 방사각을 갖는 제 2 출력 레이저빔을 함께 출력하는 레이저 송신부; 상기 제 1 및 제 2 출력 레이저빔들이 관측 대상으로부터 반사된 제 1 및 제 2 반사 레이저빔들을 수신하여 상기 관측 대상을 감지하는 레이저 검출부; 및 상기 레이저 검출부의 감지 결과를 수신하여 상기 레이저 송신부를 제어하는 제어 분석부를 포함하고, 상기 제 1 및 제 2 방사각들은 서로 다르다.
실시 예로서, 상기 레이저 송신부는 상기 레이저 분석부의 제어에 따라 제 1 및 제 2 입력 레이저빔들을 생성하는 레이저 발생기; 및 상기 제 1 및 제 2 입력 레이저빔들을 수신하여 제 1 및 제 2 방사각들을 갖는 제 1 및 제 2 출력 레이저빔들을 출력하는 레이저 방출기 모듈을 포함안다.
실시 예로서, 상기 레이저 검출부는 상기 제 1 및 제 2 반사 레이저빔들을 수신하고, 상기 수신된 제 1 및 제 2 반사 레이저빔들을 집광하여 집광 레이저빔을 출력하는 검출 광학계; 상기 집광 레이저빔을 수신하고, 상기 수신된 집광 레이저빔을 상기 제 1 및 제 2 반사 레이저빔들로 분할하는 파장 분할 변조 필터; 및 상기 파장 분할 변조 필터로부터 상기 제 1 및 제 2 반사 레이저빔들을 각각 수신하여, 상기 관측 대상을 감지하는 제 1 및 제 2 검출기들을 포함한다.
실시 예로서, 상기 검출 광학계는 상기 제 1 및 제 2 반사 레이저빔들에 포함된 잡음광을 제거하는 잡음광 필터를 포함한다.
실시 예로서, 상기 제 1 방사각이 상기 제 2 방사각보다 작은 경우, 상기 제 1 검출부는 소정의 거리 이상에 위치한 관측 대상을 감지하고, 상기 제 2 검출부는 소정의 거리 이하에 위치한 관측 대상을 감지한다.
실시 예로서, 상기 레이저 분석부는 상기 레이저 검출부의 상기 감지 결과를 수신하여 외부 장치로 전송한다.
실시 예로서, 상기 제 1 및 제 2 출력 레이저빔들이 제 1 시간동안 함께 출력되고, 제 2 시간동안 함께 출력되지 않는다.
실시 예로서, 상기 제어 분석부는 상기 제 1 출력 레이저빔이 소정의 시간동안 출력된 후 제 1 시간동안 상기 제 1 및 제 2 출력 레이저빔들을 출력하지 않고, 상기 제 1 시간 이후 상기 제 2 출력 레이저빔이 소정의 시간동안 출력된 후 제 2 시간동안 상기 제 1 및 제 2 레이저빔들을 출력하지 않는다.
실시 예로서, 상기 제 1 및 제 2 시간들은 상기 제 1 및 제 2 출력 레이저빔들의 TOF를 기반으로 결정된다.
실시 예로서, 상기 레이저 검출부는 상기 관측 대상을 검출하는 단일 검출부를 포함하고, 상기 단일 검출부는 제 1 시간동안 상기 제 1 반사 레이저빔을 수신하여 상기 관측대상을 수신하고, 제 2 시간동안 상기 제 2 반사 레이저빔을 수신하여 상기 관측대상을 검출한다.
본 발명에 따른 레이저 감지 시스템은 서로 다른 방사각을 갖는 복수의 레이저빔을 함께 사용함으로서 장거리 또는 단거리에 위치한 관측 대상이 감지된다. 따라서, 감소된 비용 및 면적을 갖는 레이저 방출기 모듈 및 레이저 감지 시스템이 제공된다.
도 1은 본 발명의 실시 예에 따른 레이저 감지 시스템을 보여주는 블록도이다.
도 2a 및 도 2b는 도 1에 도시된 레이저 방출기 모듈에 포함된 제 1 및 제 2 레이저 방출기들을 보여주는 도면들이다.
도 2c는 도 1에 도시된 레이저 방출기 모듈을 상세하게 설명하기 위한 도면이다.
도 3a은 본 발명의 다른 실시 예에 따른 레이저 방출기 모듈을 설명하기 위한 도면이다.
도 3b는 도 3a에 도시된 레이저 방출기 모듈의 일부 영역을 확대한 도면이다.
도 4는 본 발명의 다른 실시 예에 따른 레이저 방출기 모듈을 설명하기 위한 도면이다.
도 5는 도 4에 도시된 레이저 방출기 모듈이 적용된 레이저 감지 시스템의 동작을 설명하기 위한 도면이다.
도 6은 본 발명의 또 다른 실시 예에 따른 레이저 감지 시스템의 동작을 설명하기 위한 타이밍도이다.
도 7은 본 발명의 또 다른 실시 예에 따른 레이저 감지 시스템을 보여주는 블록도이다.
도 8은 도 7에 도시된 레이저 감지 시스템의 동작을 설명하기 위한 타이밍도이다.
도 2a 및 도 2b는 도 1에 도시된 레이저 방출기 모듈에 포함된 제 1 및 제 2 레이저 방출기들을 보여주는 도면들이다.
도 2c는 도 1에 도시된 레이저 방출기 모듈을 상세하게 설명하기 위한 도면이다.
도 3a은 본 발명의 다른 실시 예에 따른 레이저 방출기 모듈을 설명하기 위한 도면이다.
도 3b는 도 3a에 도시된 레이저 방출기 모듈의 일부 영역을 확대한 도면이다.
도 4는 본 발명의 다른 실시 예에 따른 레이저 방출기 모듈을 설명하기 위한 도면이다.
도 5는 도 4에 도시된 레이저 방출기 모듈이 적용된 레이저 감지 시스템의 동작을 설명하기 위한 도면이다.
도 6은 본 발명의 또 다른 실시 예에 따른 레이저 감지 시스템의 동작을 설명하기 위한 타이밍도이다.
도 7은 본 발명의 또 다른 실시 예에 따른 레이저 감지 시스템을 보여주는 블록도이다.
도 8은 도 7에 도시된 레이저 감지 시스템의 동작을 설명하기 위한 타이밍도이다.
이하에서, 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자가 본 발명의 기술적 사상을 용이하게 실시할 수 있을 정도로 상세하게 설명하기 위하여 본 발명의 실시 예들을 첨부된 도면들을 참조하여 설명하기로 한다.
본 발명에 따른 레이저 감지 시스템은 서로 다른 방사각(Radiation Angle)을 갖는 레이저빔(laser beam)을 송출하는 레이저 송신부 및 서로 다른 파장을 갖는 레이저빔들을 검출하는 레이저 검출부를 포함한다. 레이저 감지 시스템은 서로 다른 방사각을 갖는 레이저빔들을 사용하여 광시야각의 단거리 감지 및 협시야각의 장거리 감지를 제공한다. 따라서, 레이저 감지 시스템의 성능이 향상되고, 비용이 감소된다.
도 1은 본 발명의 실시 예에 따른 레이저 감지 시스템(Laser Detecting System)을 보여주는 도면이다. 예시적으로, 도 1에 도시된 레이저 감지 시스템(1000)은 제 1 및 제 2 파장들(λ1, λ2)을 갖는 제 1 및 제 2 레이저빔들(LB1, LB2)을 기반으로 동작한다. 그러나, 본 발명의 범위가 이에 한정되는 것은 아니며, 본 발명에 따른 레이저 감지 시스템은 각각 서로 다른 파장들을 갖는 복수의 레이저빔들을 기반으로 동작할 수 있다.
도 1을 참조하면, 레이저 감지 시스템(1000)은 서로 다른 방사각 및 서로 다른 파장을 갖는 복수의 레이저빔들을 사용하여 단거리 또는 장거리에 위치한 관측 대상의 감지를 제공할 수 있다. 레이저 감지 시스템(1000)은 레이저 송신부(1100, Laser Transmission Unit), 레이저 검출부(1200, Laser Detection Unit), 및 연산 분석부(1300, Control Analysis Unit)를 포함하다.
레이저 송신부(1100)는 레이저 발생기(1110, Laser Generator), 레이저 방출기 모듈(1120, Laser Emitter Module), 및 방출기 광학계(1130, Emitter Optical System)를 포함한다.
레이저 발생기(1110)는 서로 다른 파장을 갖는 제 1 및 제 2 입력 레이저빔들(LB1_in, LB2_in)을 출력할 수 있다. 예를 들어, 레이저 발생기(1110)는 제 1 및 제 2 레이저 다이오드들(1111, 1112)을 포함한다. 제 1 레이저 다이오드(1111)는 제 1 파장(λ1)을 갖는 제 1 입력 레이저빔(LB1_in)을 출력할 수 있다. 제 2 레이저 다이오드(1112)는 제 1 파장(λ1)과 다른 제 2 파장(λ1)을 갖는 제 2 입력 레이저빔(LB2_in)을 출력할 수 있다. 제 1 및 제 2 레이저 다이오드들(1111, 1112)로부터 출력된 제 1 및 제 2 입력 레이저빔들(LB1_in, LB2_in)은 레이저 방출기 모듈(1120)로 전송된다.
레이저 방출기 모듈(1120, Laser Emitter Module)은 제 1 및 제 2 입력 레이저빔들(LB1_in, LB2_in)을 수신하여, 서로 다른 방사각을 갖는 제 1 및 제 2 레이저빔들(LB1, LB2)을 출력한다. 예를 들어, 레이저 방출기 모듈(1120)은 레이저 발생기(1110)로부터 수신된 제 1 및 제 2 입력 레이저빔들(LB1_in, LB2_in)을 복수의 채널을 통해 제 1 및 제 2 레이저빔들(LB1, LB2)을 출력할 수 있다.
예시적으로, 레이저 방출기 모듈(1120)은 복수의 레이저 방출기들을 포함할 수 있다. 예시적으로, 제 1 및 제 2 레이저빔들(LB1, LB2)의 방사각들은 제 1 및 제 2 입력 레이저빔들(LB1_in, LB2_in)의 파장들, 레이저 방출기 모듈(1120)에 포함된 복수의 레이저 방출기들의 출력단들의 곡률 반경 또는 레이저 방출기 모듈(1120)에 포함된 복수의 레이저 방출기들의 도파로들(waveguides)의 구조에 따라 서로 다르게 조절될 수 있다. 레이저 방출기 모듈(1120)은 도 2a 내지 도 4를 참조하여 더욱 상세하게 설명된다.
방출기 광학계(1130, Emitter's Optical System)는 레이저 방출기 모듈(1120)로부터 제 1 및 제 2 레이저빔들(LB1, LB2)을 수신하여, 제 1 및 제 2 출력 레이저빔들(LB1_out, LB2_out)을 출력할 수 있다. 예시적으로, 방출기 광학계(1130)는 수신된 제 1 및 제 2 레이저빔들(LB1, LB2)의 방사각들(Radiation Angle)을 조절하여 서로 다른 최종 방사각을 갖는 제 1 및 제 2 출력 레이저빔들(LB1_out, LB2_out)을 출력한다. 예시적으로, 방출기 광학계(1130)는 복수의 렌즈들을 포함할 수 있다. 방출기 광학계(1130)는 복수의 렌즈들이 조립된 구조를 포함할 수 있다.
계속해서 도 1을 참조하면, 레이저 검출부(1200)는 검출기 광학계(1210, Detector's Optical System), 파장 분할 변조 필터(1220, WDM filter; Width Division Modulation filter), 및 제 1 및 제 2 검출부들(1231, 1232, Detection Unit)을 포함한다.
검출기 광학계(1210, Detector's Optical System)는 제 1 및 제 2 반사 레이저빔들(LB1_ref, LB2_ref)을 수신한다. 예시적으로, 제 1 및 제 2 반사 레이저빔들(LB1_ref, LB2_ref)는 제 1 및 제 2 출력 레이저빔들(LB1_out, LB2_out)이 관측 대상으로부터 반사된 레이저빔들이다. 검출기 광학계(1210)는 수신된 제 1 및 제 2 반사 레이저빔들(LB1_ref, LB2_ref)을 집광(concentration light)하여 집광 레이저빔(LB_con)을 출력한다. 집광 레이저빔(LB_con)은 파장 분할 변조 필터(1220)로 전송된다. 예시적으로, 집광 레이저빔(LB_con)은 제 1 및 제 2 반사 레이저빔들(LB1_ref, LB2_ref)을 포함한다. 예시적으로, 검출기 광학계(1210)는 제 1 및 제 2 반사 레이저빔(LB1_ref, LB2_ref)에 포함된 잡음광(noise light)을 제거하는 필터를 포함할 수 있다.
파장 분할 변조 필터(1220)는 수신된 집광 레이저빔(LB_con)을 각 파장 별로 분할할 수 있다. 예를 들어, 집광 레이저빔(LB_con)은 제 1 및 제 2 반사 레이저빔들(LB1_ref, LB2_ref)을 포함할 수 있다. 제 1 반사 레이저빔(LB1_ref)은 제 1 파장(λ1)을 가질 수 있다. 제 2 반사 레이저빔(LB2_ref)은 제 1 파장(λ1)과 다른 제 2 파장(λ2)을 가질 수 있다. 파장 분할 변조 필터(1220)는 집광 레이저빔(LB_con)을 분할하여 제 1 파장(λ1)을 갖는 제 1 반사 레이저빔(LB1_ref)을 제 1 검출부(1231)로 전송하고, 제 2 파장(λ2)을 갖는 제 2 반사 레이저빔(LB2_ref)을 제 2 검출부(1232)로 전송할 수 있다.
제 1 및 제 2 검출부들(1231, 1232)은 수신된 제 1 및 제 2 반사 레이저빔들(LB1_ref, LB2_ref)을 기반으로 소정의 거리만큼 떨어진 관측 대상을 감지할 수 있다. 예를 들어, 제 1 검출부(1231)는 m×n의 구조를 갖는 포토 다이오드 어레이(PD; Photo Diode Array)를 포함할 수 있다. m×n의 구조를 갖는 포토 다이오드 어레이는 장거리 감지에 보다 적합한 장치일 수 있다. 제 2 검출부(1232)는 j×k의 구조를 갖는 포토 다이오드 어레이를 포함할 수 있다. j×k의 구조를 갖는 포토 다이오드 어레이는 단거리 감지에 보다 적합한 장치일 수 있다. 이 경우, 레이저 감지 시스템(1000)과 관측 대상과의 거리가 일정 거리이상인 경우, 제 1 검출부(1231)는 관측 대상을 감지할 것이다. 이와 반대로, 레이저 감지 시스템(1000)과 관측 대상과의 거리가 일정 거리 이하인 경우, 제 2 검출부(1232)는 관측 대상을 감지할 것이다. 다시 말해서, 제 1 및 제 2 검출부들(1231, 1232)은 서로 다른 각도 분해능을 갖고, 서로 다른 거리에 위치한 관측 대상을 감지할 수 있다.
계속해서 도 1을 참조하면, 제어 분석부(1300, Control Analysis Unit)는 레이저빔 발생부(1110)를 제어할 수 있다. 예를 들어, 제어 분석부(1300)는 제 1 및 제 2 레이저 다이오드들(1111, 1112)을 제어할 수 있다. 예시적으로, 제어 분석부(1300)는 제 1 및 제 2 검출부들(1231, 1232)의 출력을 수신하여 수신된 출력을 외부 기기(미도시)로 전송할 수 있다.
상술된 본 발명의 실시 예에 따른 레이저 감지 시스템(1000)은 서로 다른 파장 및 방사각을 갖는 복수의 레이저빔들을 함께 송출하고, 반사된 복수의 레이저빔들을 수신하여 장거리 또는 단거리에 위치한 관측 대상을 감지할 수 있다. 따라서, 레이저 감지 시스템의 성능이 향상되고, 비용이 감소된다.
이하에서, 도 2a 내지 도 4를 참조하여 레이저 방출기 모듈이 더욱 상세하게 설명된다. 간결한 설명을 위하여, 이하에서 설명되는 레이저빔들은 레이저 방출기들의 레이저빔 출력 축 방향(axis direction)과 수직한 방향(예를 들어, 지면과 수직한 방향)의 방사각이 조절되는 것으로 가정한다. 그러나 본 발명의 범위가 이에 한정되는 것은 아니며, 본 발명에 따른 레이저 감지 시스템은 다른 방향(예를 들어, 지면과 수평한 방향)의 방사각 또한 조절될 수 있다.
도 2a 및 도 2b는 도 1에 도시된 레이저 방출기 모듈에 포함된 제 1 및 제 2 레이저 방출기들을 상세하게 설명하기 위한 도면들이다. 예시적으로, 제 1 및 제 2 레이저 방출기들(1121, 1122)은 도 1에 도시된 레이저 방출기 모듈(1120)에 포함된다.
먼저 도 2a를 참조하면, 제 1 레이저 방출기(1121)는 제 1 입력 레이저빔(LB1_in)을 수신한다. 제 1 레이저 방출기(1121)는 제 1 도파로(1121a, first waveguide)를 포함한다. 도파로(1121a)는 제 1 입력 레이저빔(LB1_in)이 분배될 수 있는 복수의 채널들을 제공한다. 제 1 레이저 방출기(1121)는 수신된 제 1 입력 레이저빔(LB1_in)을 복수의 채널들을 통해 분배된 제 1 레이저빔(LB1)으로 출력한다. 예시적으로, 제 1 레이저빔(LB1)은 제 1 방사각(θ1)을 갖는다. 예시적으로, 제 1 레이저 방출기(1121)의 출력단은 제 1 곡률 반경(R1)을 가질 수 있다. 예시적으로, 제 1 레이저 방출기들(1121)은 PLC(Planar Lightwave Circuit) 구조의 광 분배기(light splitter)를 기반으로 제공될 수 있다.
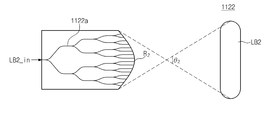
다음으로 도 2b를 참조하면, 제 2 레이저 방출기(1122)는 제 1 입력 레이저빔(LB2_in)을 수신한다. 제 2 레이저 방출기(1122)는 제 2 도파로(1122a)를 포함한다. 제 2 레이저 방출기(1122)는 수신된 제 2 입력 레이저빔(LB2_in)을 복수의 채널들을 통해 분배하여 제 2 레이저빔(LB2)으로 출력한다. 예시적으로, 제 2 레이저빔(LB2)은 제 2 방사각(θ2)을 갖는다. 예시적으로, 제 2 레이저 방출기(1122)의 출력단은 제 2 곡률 반경(R2)을 가질 수 있다. 예시적으로, 제 2 레이저 방출기(1122)는 PLC(Planar Lightwave Circuit) 구조의 광 분배기(light splitter)를 기반으로 제공될 수 있다.
도 2a 및 도 2b를 참조하여 설명된 바와 같이 제 1 및 제 2 레이저 방출기들(1121, 1122)은 서로 다른 곡률 반경을 갖는다. 예시적으로, 제 1 및 제 2 레이저 방출기들(1121, 1122)의 곡률 반경을 조절하여 서로 다른 방사각들을 갖는 제 1 및 제 2 레이저빔들(LB1, LB2)을 출력할 수 있다. 예를 들어, 제 1 곡률 반경(R1)이 제 2 곡률 반경(R2)보다 클 경우, 제 1 방사각(θ1)은 제 2 방사각(θ2)보다 작다. 다시 말해서, 레이저 방출기의 출력단의 곡률 반경이 커질수록 방출되는 레이저빔의 방사각은 작아진다.
예시적으로, 도 2a 및 도 2b에 도시된 제 1 및 제 2 레이저 방출기들(1121, 1122)의 제 1 및 제 2 곡률반경들(R1, R2)은 볼록한 구조를 갖는다. 그러나, 본 발명의 범위가 이에 한정되는 것은 아니며, 제 1 및 제 2 곡률반경들(R1, R2)은 평면 또는 오목한 구조를 가질 수 있다.
도 2c는 도 1에 도시된 레이저 방출기 모듈을 더욱 상세하게 설명하기 위한 도면이다. 도 2c를 참조하면, 레이저 방출기 모듈(1120)은 도 2a 및 도 2b를 참조하여 설명된 제 1 및 제 2 레이저 방출기들(1121, 1122)을 포함한다. 레이저 방출기 모듈(1120)은 제 1 및 제 2 입력 레이저빔들(LB1_in, LB2_in)을 수신하여, 제 1 및 제 2 레이저빔들(LB1, LB2)을 출력한다. 예를 들어, 제 1 레이저 방출기(1121)는 제 1 입력 레이저빔(LB1_in)를 수신하여 제 1 방사각(θ1)을 갖는 제 1 레이저빔(LB1)을 출력한다. 제 2 레이저 방출기(1122)는 제 2 입력 레이저빔(LB2_in)을 수신하여 제 2 방사각(θ2)을 갖는 제 2 레이저빔(LB2)을 출력한다. 즉, 제 1 및 제 2 레이저빔들(LB1, LB2)은 서로 다른 방사각을 갖는다.
예시적으로, 도 2c에 도시된 제 1 및 제 2 레이저빔들(LB1, LB2)의 수평방향의 위치는 서로 동일한 것으로 가정한다. 그러나, 본 발명의 범위가 이에 한정되는 것은 아니며, 제 1 및 제 2 레이저빔들(LB1, LB2)의 수평방향의 위치는 서로 다를 수 있다.
예시적으로, 제 1 레이저빔(LB1)은 장거리에 위치한 관측 대상을 감지하는데 사용될 수 있다. 제 2 레이저빔(LB2)은 단거리에 위치한 관측 대상을 감지하는데 사용될 수 있다.
상술된 본 발명의 실시 예에 따른 레이저 방출기 모듈(1120)은 장거리 관측 대상의 감지를 위한 제 1 레이저빔(LB1) 및 단거리 관측 대상의 감지를 위한 제 2 레이저빔(LB2)을 함께 출력할 수 있다.
도 3a는 본 발명의 다른 실시 예에 따른 레이저 방출기 모듈을 보여주는 사시도이다. 도 3a를 참조하면, 레이저 방출기 모듈(2120)은 제 1 내지 제 3 레이저 방출기들(2121~2123)을 포함한다. 제 1 내지 제 3 레이저 방출기들(2121~2123)은 제 1 내지 제 3 입력 레이저빔들(LB1_in~LB3_in)을 수신하여, 제 1 내지 제 3 레이저빔들(LB1~LB3)을 출력한다. 예를 들어, 제 2 및 제 3 레이저 방출기들(2122, 2123)은 서로 동일한 구조의 도파로를 포함할 수 있다. 제 2 및 제 3 레이저 방출기들(2122, 2123)은 각각 제 1 및 제 2 입력 레이저빔(LB2_in, LB3_in)을 수신하여 제 2 및 제 3 레이저빔들(LB2, LB3)을 출력한다. 제 1 레이저 방출기(2121)는 제 2 및 제 3 레이저 방출기들(2122, 2123)과 다른 구조를 갖는 도파로를 포함할 수 있다.
예시적으로, 제 2 및 제 3 입력 레이저빔들(LB2_in, LB3_in)은 서로 다른 파장을 갖는다. 결과적으로, 제 2 및 제 3 레이저 방출기들(2122, 2123)은 동일한 구조의 도파로를 포함하는 경우에도, 제 2 및 제 3 레이저빔들(LB2, LB3)은 서로 다른 방사각들을 가질 수 있다. 다시 말해서, 레이저 방출기 모듈(2120)은 입력 레이저빔의 파장을 조절하여 출력되는 레이저빔의 방사각을 조절할 수 있다. 예시적으로, 입력 레이저빔의 파장이 길어질수록, 출력되는 레이저빔의 방사각은 커질 것이다.
도 3b는 도 3a에 도시된 영역(212a)을 확대한 도면이다. 예시적으로, 도 3b에 도시된 영역(212a)을 참조하여 레이저 방출기의 도파로 크기 및 레이저빔의 방사각의 관계가 설명된다.
도 3a 및 도 3b를 참조하면, 제 1 및 제 3 레이저 방출기들(2121~2123)은 서로 다른 도파로 크기를 갖는다. 예를 들어, 제 1 레이저 방출기(2121)의 도파로는 제 1 폭(w1) 및 제 1 높이(t1)의 크기를 갖는다. 제 2 레이저 방출기(2122)의 도파로는 제 2 폭(w2) 및 제 2 높이(t2)의 크기를 갖는다. 레이저 방출기에 포함된 도파로의 크기를 조절하여 출력되는 레이저빔의 방사각을 제어할 수 있다. 예시적으로, 도파로의 크기가 작아질수록, 출력되는 레이저빔의 방사각이 커질 것이다.
도 3a 및 도 3b를 참조하여 설명된 바와 같이, 레이저 방출기에 포함된 도파로의 크기 또는 입력 레이저빔의 파장을 조절하여, 출력되는 레이저빔의 방사각을 조절할 수 있다. 따라서, 서로 다른 방사각을 갖는 복수의 레이저빔들을 함께 사용할 수 있으므로, 레이저 감지 시스템의 성능이 향상되고, 비용이 감소된다.
도 4는 본 발명의 또 다른 실시 예에 따른 레이저 방출기 모듈을 보여주는 도면이다. 도 4를 참조하면, 레이저 방출기 모듈(3120)은 제 1 및 제 2 레이저 방출기들(3121, 3122)을 포함한다. 제 1 및 제 2 레이저 방출기들(3121, 3122)은 도 2a 및 도 2b를 참조하여 설명되었으므로, 이에 대한 설명은 생략된다.
레이저 방출기 모듈(3120)은 도 2c에 도시된 레이저 방출기 모듈(1120)과 비교하여 제 1 및 제 2 레이저 방출기들(3121, 3122)의 출력 축 방향(axis direction)은 소정의 각도(θc)만큼 차이를 갖는다. 다시 말해서, 제 1 레이저 방출기(3121)는 제 1 방향(1st direction)의 축을 따라 제 1 레이저빔(LB1)을 주사한다. 제 2 레이저 방출기(3122)는 제 2 방향(2nd direction)의 축을 따라 제 2 레이저빔(LB2)을 주사한다. 제 1 방향(1st direction)의 축과 제 2 방향(2nd direction)의 축은 서로 소정의 각도(θc)만큼 차이를 갖는다.
상술된 본 발명의 또 다른 실시 예에 따르면, 레이저 방출기 모듈(3120)은 복수의 레이저 방출기들의 레이저빔 출력 축 방향의 각을 서로 다르게 조절함으로써 관측 대상의 감지 성능이 향상된다. 예를 들어, 레이저 방출기 모듈(3120)에 포함된 레이저 방출기들의 레이저빔의 출력 축 방향을 지면방향으로 소정의 각도만큼 기울어지게 할 경우, 지면으로부터 근접한 곳에 위치한 관측 대상의 감지 성능이 향상될 것이다.
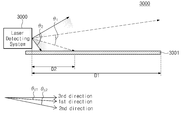
도 5는 도 4에 도시된 레이저 방출기 모듈이 적용된 레이저 감지 시스템의 동작을 설명하기 위한 도면이다. 도 5를 참조하면, 레이저 감지 시스템(3000)은 지면(3001)과 평행한 방향을 따라 위치한 관측 대상을 감지할 수 있다. 예를 들어, 레이저 감지 시스템(3000)은 상술된 구성 요소들의 동작들을 기반으로 장거리(D2) 또는 단거리(D1)에 위치한 관측 대상을 감지할 수 있을 것이다. 이 때, 레이저 감지 시스템(3000)은 제 2 방사각(θ2)을 갖는 제 2 레이저빔을 기반으로 단거리(D2) 내에 위치한 사물을 감지할 것이다. 레이저 감지 시스템(3000)은 제 1 방사각(θ1)을 갖는 제 1 레이저빔을 기반으로 장거리(D1) 내에 위치한 관측 대상을 감지할 것이다.
제 1 레이저빔(LB1)은 제 1 방향(1st direction)의 축 방향으로 출력 축 방향을 가지게 될 것이다. 제 2 레이저빔(LB2)은 제 2 방향(2nd direction)의 축 방향으로 출력 축 방향을 가지게 될 것이다. 예시적으로, 제 1 방향(1st direction)의 축은 제 3 방향(3rd direction)의 축과 서로 제 1 각도(θ1)만큼 차이를 갖는다. 제 2 방향(2nd direction)의 축은 제 3 방향(3rd direction)의 축과 서로 제 2 각도(θ2)만큼 차이를 갖는다. 제 3 방향(3rd direction)의 축은 지면(3001)과 평행한 방향을 가리킨다. 다시 말해서, 레이저 감지 시스템(3000)은 제 1 및 제 2 레이저빔들(LB1, LB2)을 제 1 및 제 2 각도들(θ1, θ2)만큼 차이를 갖도록 지면(3001)을 향하는 방향으로 주사함으로서, 지면(3001)에 위치한 관측 대상 감지 성능이 향상된다.
상술된 본 발명의 또 다른 실시 예에 따르면, 레이저 감지 시스템(3000)은 출력되는 레이저빔의 진행 방향을 조절하여, 지면(3001)에 위치한 사물의 감지 성능을 향상시킬 수 있다.
도 6은 본 발명의 또 다른 실시 예에 따른 레이저 감지 시스템의 동작을 설명하기 위한 타이밍도이다. 예시적으로, 제 1 및 제 2 출력 레이저빔들(LB1_out, LB2_out)이 동시에 출력될 경우, 순간적인 과출력으로 인하여 시스템이 불안정해지거나, 동시에 출력된 레이저빔들의 세기의 합이 신체 보호 기준을 초과할 수 있다. 레이저 감지 시스템(1000)은 도 8에 도시된 타이밍도에 따라서 제 1 및 제 2 출력 레이저빔들(LB1_out, LB2_out)을 출력할 수 있다.
도 1 및 도 6을 참조하면, 제 1 및 제 2 펄스 신호들(PS1, PS2)는 레이저 발생기(1110)를 제어하는 신호들이다. 예를 들어, 제 1 펄스 신호(PS1)에 응답하여 제 1 레이저 다이오드(1111)는 제 1 입력 레이저빔(LB1_in)을 출력할 수 있다. 제 2 펄스 신호(PS2)에 응답하여, 제 2 레이저 다이오드(1112)는 제 2 입력 레이저빔(LB2_in)을 출력할 수 있다. 제 1 및 제 2 펄스 신호들(PS1, PS2)는 소정의 시간 간격동안 제 1 및 제 2 입력 레이저빔들(LB1_in, LB2_in)이 출력되도록 도 6에 도시된 바와 같은 펄스 신호 형태를 갖는다. 다시 말해서, 제 1 및 제 2 펄스 신호들(PS1, PS2)은 제 1 시간(t1)동안 임펄스 신호이고, 그 후 제 2 시간(t2)동안 0인 주기 신호를 가리킨다.
이 경우, 제 1 및 제 2 입력 레이저빔들(LB1_in, LB2_in)의 출력 시간을 조절함으로써, 과출력을 방지하고, 신체 보호 기준을 만족시키는 레이저 감지 시스템이 제공된다.
도 7은 본 발명의 또 다른 실시 예에 따른 레이저 감지 시스템을 보여주는 블록도이다. 도 7을 참조하면, 레이저 감지 시스템(4000)은 레이저 송신부(4100), 레이저 검출부(4200), 및 제어 분석부(4300)를 포함한다. 레이저 송신부(4100)는 레이저 발생부(4110), 레이저 방출기 모듈(4120), 및 방출기 광학계(4130)를 포함한다. 레이저 검출부(4200)는 검출기 광학계(4210) 및 단일 검출부(4230)를 포함한다. 도 7에 도시된 구성요소들은 도 1을 참조하여 설명되었으므로 이에 대한 상세한 설명은 생략된다. 이하에서 도 9의 레이저 감지 시스템(4000)과 도 1의 레이저 감지 시스템(1000)의 차이점이 중점적으로 설명된다.
레이저 감지 시스템(4000)은 도 1의 레이저 감지 시스템(1000)과 달리 단일 검출기를 사용하여 장거리 또는 단거리에 위치한 관측 대상을 감지할 수 있다. 예를 들어, 제어 분석부(4300)는 레이저 방출기 모듈(4120)에 포함된 복수의 레이저 방출기들을 서로 다른 펄스 신호들을 기반으로 제어함으로서, 서로 다른 방사각을 갖는 복수의 레이저빔들이 소정의 시간 간격을 두고 출력된다. 다시 말해서, 제어 분석부(4300)는 일정 시간동안 장거리 감지를 위한 제 1 출력 레이저빔(LB1_out)을 출력하고, 소정의 시간 이후에 일정 시간동안 단거리 감지를 위한 제 2 출력 레이저빔(LB2_out)을 출력한다.
이 때, 제 1 및 제 2 출력 레이저빔들(LB1_out, LB2_out)이 출력되는 시간은 각 레이저빔들의 TOF(Time Of Flight)에 따라 결정될 수 있다. TOF는 레이저빔이 관측대상에 반사되어 돌아오는 시간을 가리킨다. 예를 들어, 장거리 감지를 위한 제 1 출력 레이저빔(LB1_out)의 TOF는 단거리 감지를 위한 제 2 출력 레이저빔(LB2_out)보다 짧다. 따라서, 제 1 출력 레이저빔(LB1_out)이 출력되는 시간은 제 2 출력 레이저빔(LB2_out)이 출력되는 시간보다 길 것이다.
상술된 방법에 따라, 단일 검출기는 제 1 및 제 2 반사 레이저빔들(LB1_ref1, LB2_ref2)을 서로 다른 시간영역에서 검출할 수 있다. 예시적으로, 도 7의 레이저 발생기(4110)로부터 출력되는 입력 레이저빔(LB_in)은 서로 다른 파장을 갖는 복수의 레이저빔들 또는 단일 파장을 갖는 복수의 레이저빔들일 수 있다. 다시 말해서, 단일 검출부(4230)는 레이저빔들의 파장과 무관하게 서로 다른 시간영역에서 수신되는 반사 신호들을 검출하여 장거리 또는 단거리에 위치한 관측 대상을 관측할 수 있다.
도 8은 도 7에 도시된 레이저 감지 시스템의 동작을 설명하기 위한 타이밍도이다. 도 7 및 도 8을 참조하면, 레이저 감지 시스템(4000)은 제 3 및 제 4 펄스 신호들(PS3, PS4)을 기반으로 동작할 수 있다. 예를 들어, 제어 분석부(4300)는 제 3 펄스 신호(PS3)에 응답하여, 입력 레이저빔(LB_in)이 제 1 방사각(θ1)을 갖는 제 1 출력 레이저빔(LB1_out)이 되도록 레이저 송신부(4110)를 제어할 수 있다. 이 경우, 레이저 송신부는 제 3 펄스 신호(PS3)의 임펄스 구간동안 제 1 출력 레이저빔(LB1_out)을 출력한다. 이 후, 제 3 시간(t3)동안 레이저 송신부는 제 1 및 제 2 출력 레이저빔들(LB1_out, LB2_out)을 출력하지 않는다. 제 1 시간(t3)동안 레이저 검출부는 관측 대상으로부터 반사된 제 1 반사 레이저빔(LB1_ref)을 수신하여 관측 대상을 감지할 수 있다.
제 1 시간(t1) 이 후에 레이저 송신부는 제어 분석부의 제어에 따라 임펄스 시간동안 제 2 출력 레이저빔(LB2_out)을 출력한다. 이 후, 레이저 송신부(4110)는 제 4 시간(t4)동안 제 1 및 제 2 레이저빔들(LB1_out, LB2_out)을 출력하지 않는다. 제 4 시간(t4)동안 레이저 검출부(4110)는 단거리에 위치한 관측대상으로부터 반사된 제 2 반사 레이저빔(LB2_ref)을 수신하여 단거리에 위치한 관측 대상을 감지할 수 있다.
예시적으로, 제 3 및 제 4 시간들(t3, t4)은 제 1 및 제 2 출력 레이저빔들(LB1_out, LB2_out)의 TOF에 따라 결정될 수 있다. 예를 들어, 제 1 출력 레이저빔(LB1_out)은 좁은 방사각을 갖는 장거리 감지용 레이저빔일 수 있다. 제 2 출력 레이저빔(LB2_out)은 넓은 방사각을 갖는 단거리 감지용 레이저빔일 수 있다. 이 경우, 제 1 출력 레이저빔(LB1_out)의 TOF는 제 2 출력 레이저빔(LB2_out)의 TOF보다 길다. 제 1 출력 레이저빔(LB1_out)의 TOF를 기반으로 제 3 시간(t3)이 결정되고, 제 2 출력 레이저빔(LB2_out)의 TOF를 기반으로 제 4 시간(t4)이 결정될 수 있다.
도 7 및 도 8을 참조하여 설명된 본 발명의 또 다른 실시 예에 따르면, 서로 다른 파장 또는 동일한 파장을 갖는 레이저빔들을 소정의 시간 간격을 두고 출력하여 단거리 및 장거리에 위치한 관측 대상을 감지하는 레이저 감지 시스템이 제공된다. 따라서, 레이저 감지 시스템의 성능이 향상되고, 비용이 감소된다.
상술된 본 발명의 실시 예들에 따르면, 레이저 감지 시스템은 서로 다른 방사각을 갖는 복수의 레이저빔들을 함께 출력하는 레이저 방출기 모듈을 포함한다. 레이저 감지 시스템은 서로 다른 방사각을 갖는 복수의 레이저빔들을 사용하여 장거리 또는 단거리에 위치한 관측 대상을 감지할 수 있다. 따라서, 레이저 감시 시스템의 성능이 향상되고 비용이 감소된다.
본 발명의 상세한 설명에서는 구체적인 실시 예에 관하여 설명하였으나, 본 발명의 범위에서 벗어나지 않는 한도 내에서 여러 가지 변형이 가능하다. 그러므로, 본 발명의 범위는 상술한 실시 예에 국한되어 정해져서는 안되며 후술하는 특허청구범위뿐만 아니라 이 발명의 특허청구범위와 균등한 것들에 의해 정해져야 한다.
1000 : 레이저 감지 시스템
1100 : 레이저 송신부
1110 : 레이저 발생부
1120 : 레이저 방출기 모듈
1130 : 방출기 광학계
1200 : 레이저 검출부
1210 : 검출기 광학계
1220 : 파장 분할 변조 필터
1231, 1232 : 제 1 및 제 2 검출부들
1300 : 제어 분석부
LB1, LB2 : 제 1 및 제 2 레이저빔들
θ1, θ2 : 제 1 및 제 2 방사각들
1100 : 레이저 송신부
1110 : 레이저 발생부
1120 : 레이저 방출기 모듈
1130 : 방출기 광학계
1200 : 레이저 검출부
1210 : 검출기 광학계
1220 : 파장 분할 변조 필터
1231, 1232 : 제 1 및 제 2 검출부들
1300 : 제어 분석부
LB1, LB2 : 제 1 및 제 2 레이저빔들
θ1, θ2 : 제 1 및 제 2 방사각들
Claims (17)
- 제 1 입력 레이저빔을 수신하여 제 1 방사각을 갖는 제 1 레이저빔을 출력하는 제 1 레이저 방출기 및
상기 제 1 입력 레이저빔의 파장과 다른 파장을 갖는 제 2 입력 레이저빔을 수신하여 상기 제 1 방사각과 다른 제 2 방사각을 갖는 제 2 레이저빔을 출력하는 제 2 레이저 방출기를 포함하고,
상기 제 1 및 제 2 레이저 방출기들은 상기 제 1 및 제 2 레이저빔들을 함께 출력하는 레이저 방출기 모듈. - 제 1 항에 있어서,
상기 제 1 및 제 2 레이저 방출기들의 출력단들은 서로 다른 곡률반경을 갖는 레이저 방출기 모듈. - 제 2 항에 있어서,
상기 제 1 및 제 2 레이저 방출기들의 출력단들의 곡률반경이 커질수록 상기 제 1 및 제 2 레이저빔들의 제 1 및 제 2 방사각들이 커지는 레이저 방출기 모듈. - 제 1 항에 있어서,
상기 제 1 및 제 2 레이저 방출기들은 서로 다른 구조의 도파로들을 포함하고, 상기 도파로의 구조에 따라 상기 제 1 및 제 2 방사각의 크기가 제어되는 레이저 방출기 모듈. - 제 4 항에 있어서,
상기 제 1 및 제 2 레이저 방출기들에 포함된 도파로들의 출력단의 크기가 커질수록 상기 제 1 및 제 2 방사각들의 크기가 작아지는 레이저 방출기 모듈. - 제 1 항에 있어서,
상기 제 1 및 제 2 레이저 방출기들의 레이저 주사 방향이 서로 다른 레이저 방출기 모듈. - 제 1 항에 있어서,
상기 제 1 및 제 2 방사각들과 다른 제 3 내지 제 n 방사각들을 갖는 제 3 내지 제 n 레이저빔들을 출력하는 제 3 내지 제 n 레이저 방출기들을 더 포함하는 레이저 방출기 모듈. - 제 1 방사각을 갖는 제 1 출력 레이저빔 및 제 2 방사각을 갖는 제 2 출력 레이저빔을 함께 출력하는 레이저 송신부;
상기 제 1 및 제 2 출력 레이저빔들이 관측 대상으로부터 반사된 제 1 및 제 2 반사 레이저빔들을 수신하여 상기 관측 대상을 감지하는 레이저 검출부; 및
상기 레이저 검출부의 감지 결과를 수신하여 상기 레이저 송신부를 제어하는 제어 분석부를 포함하고,
상기 제 1 및 제 2 방사각들은 서로 다른 레이저 감시 시스템. - 제 8 항에 있어서,
상기 레이저 송신부는
상기 레이저 분석부의 제어에 따라 제 1 및 제 2 입력 레이저빔들을 생성하는 레이저 발생기; 및
상기 제 1 및 제 2 입력 레이저빔들을 수신하여 제 1 및 제 2 방사각들을 갖는 제 1 및 제 2 출력 레이저빔들을 출력하는 레이저 방출기 모듈을 포함하는 레이저 감지 시스템. - 제 8 항에 있어서,
상기 레이저 검출부는
상기 제 1 및 제 2 반사 레이저빔들을 수신하고, 상기 수신된 제 1 및 제 2 반사 레이저빔들을 집광하여 집광 레이저빔을 출력하는 검출 광학계;
상기 집광 레이저빔을 수신하고, 상기 수신된 집광 레이저빔을 상기 제 1 및 제 2 반사 레이저빔들로 분할하는 파장 분할 변조 필터; 및
상기 파장 분할 변조 필터로부터 상기 제 1 및 제 2 반사 레이저빔들을 각각 수신하여, 상기 관측 대상을 감지하는 제 1 및 제 2 검출기들을 포함하는 레이저 감지 시스템. - 제 10 항에 있어서,
상기 검출 광학계는
상기 제 1 및 제 2 반사 레이저빔들에 포함된 잡음광을 제거하는 잡음광 필터를 포함하는 레이저 감지 시스템. - 제 10 항에 있어서,
상기 제 1 방사각이 상기 제 2 방사각보다 작은 경우, 상기 제 1 검출부는 소정의 거리 이상에 위치한 관측 대상을 감지하고, 상기 제 2 검출부는 소정의 거리 이하에 위치한 관측 대상을 감지하는 레이저 감지 시스템. - 제 8 항에 있어서,
상기 레이저 분석부는 상기 레이저 검출부의 상기 감지 결과를 수신하여 외부 장치로 전송하는 레이저 감지 시스템. - 제 8 항에 있어서,
상기 제 1 및 제 2 출력 레이저빔들이 제 1 시간동안 함께 출력되고, 제 2 시간동안 함께 출력되지 않는 레이저 감지 시스템. - 제 8 항에 있어서,
상기 제어 분석부는
상기 제 1 출력 레이저빔이 소정의 시간동안 출력된 후 제 1 시간동안 상기 제 1 및 제 2 출력 레이저빔들을 출력하지 않고, 상기 제 1 시간 이후 상기 제 2 출력 레이저빔이 소정의 시간동안 출력된 후 제 2 시간동안 상기 제 1 및 제 2 레이저빔들을 출력하지 않는 레이저 감지 시스템. - 제 15 항에 있어서,
상기 제 1 및 제 2 시간들은 상기 제 1 및 제 2 출력 레이저빔들의 TOF를 기반으로 결정되는 레이저 감지 시스템. - 제 15 항에 있어서,
상기 레이저 검출부는
상기 관측 대상을 검출하는 단일 검출부를 포함하고,
상기 단일 검출부는 제 1 시간동안 상기 제 1 반사 레이저빔을 수신하여 상기 관측대상을 수신하고, 제 2 시간동안 상기 제 2 반사 레이저빔을 수신하여 상기 관측대상을 검출하는 레이저 감지 시스템.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120148672A KR20140079090A (ko) | 2012-12-18 | 2012-12-18 | 레이저 방출기 모듈 및 그것이 적용된 레이저 감지 시스템 |
| US13/889,264 US9048609B2 (en) | 2012-12-18 | 2013-05-07 | Laser emitter module and laser detecting system to which the laser emitter module is applied |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120148672A KR20140079090A (ko) | 2012-12-18 | 2012-12-18 | 레이저 방출기 모듈 및 그것이 적용된 레이저 감지 시스템 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20140079090A true KR20140079090A (ko) | 2014-06-26 |
Family
ID=50930832
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020120148672A KR20140079090A (ko) | 2012-12-18 | 2012-12-18 | 레이저 방출기 모듈 및 그것이 적용된 레이저 감지 시스템 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9048609B2 (ko) |
| KR (1) | KR20140079090A (ko) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190014313A (ko) * | 2017-08-02 | 2019-02-12 | 주식회사 에스오에스랩 | 다채널 라이다 센서 모듈 |
| KR20200137086A (ko) * | 2019-05-28 | 2020-12-09 | 주식회사 에스원 | 반사판 레이저 감지기의 근거리 무감지 방지 시스템 및 이를 이용한 무감지 방법 |
| KR20210043735A (ko) * | 2018-11-13 | 2021-04-21 | 블랙모어 센서스 앤드 애널리틱스, 엘엘씨 | 위상 인코딩 lidar에서의 내부 반사 감산을 위한 레이저 위상 추적 방법 및 시스템 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10628950B2 (en) * | 2017-03-01 | 2020-04-21 | Microsoft Technology Licensing, Llc | Multi-spectrum illumination-and-sensor module for head tracking, gesture recognition and spatial mapping |
| WO2018166610A1 (en) * | 2017-03-16 | 2018-09-20 | Fastree3D Sa | Method and device for optimizing the use of multiple emitters and a detector in an active remote sensing application |
| DE102017005395B4 (de) * | 2017-06-06 | 2019-10-10 | Blickfeld GmbH | LIDAR-Entfernungsmessung mit Scanner und FLASH-Lichtquelle |
| CN111344870A (zh) | 2017-09-08 | 2020-06-26 | 密歇根大学董事会 | 电磁能量转换器 |
| US11536805B2 (en) * | 2018-06-25 | 2022-12-27 | Silc Technologies, Inc. | Optical switching for tuning direction of LIDAR output signals |
| CN112470035B (zh) * | 2018-12-06 | 2024-09-24 | 松下知识产权经营株式会社 | 距离信息取得装置、距离信息取得方法及程序 |
| US11703598B2 (en) | 2019-11-18 | 2023-07-18 | Silc Technologies, Inc. | Steering of LIDAR output signals |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100941444B1 (ko) | 2007-07-26 | 2010-02-11 | 광주과학기술원 | 레이저 송수신 광학계 및 그 송수신 방법, 송수신 광학계를구비하는 라이다 시스템 |
| US9229024B2 (en) | 2009-01-20 | 2016-01-05 | Koninklijke Philips N.V. | Method for adjusting a self mixing laser sensor system for measuring the velocity of a vehicle |
| US20120176554A1 (en) * | 2010-11-09 | 2012-07-12 | Cruz Bilbao | Reflectivity absorption system for identifying precious or semi-precious materials and associated methods |
| KR101071362B1 (ko) | 2011-03-25 | 2011-10-07 | 위재영 | 차량의 물체 거리 인식 시스템 및 작동 방법 |
-
2012
- 2012-12-18 KR KR1020120148672A patent/KR20140079090A/ko not_active Application Discontinuation
-
2013
- 2013-05-07 US US13/889,264 patent/US9048609B2/en not_active Expired - Fee Related
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190014313A (ko) * | 2017-08-02 | 2019-02-12 | 주식회사 에스오에스랩 | 다채널 라이다 센서 모듈 |
| US11579254B2 (en) | 2017-08-02 | 2023-02-14 | SOS Lab co., Ltd | Multi-channel lidar sensor module |
| KR20210043735A (ko) * | 2018-11-13 | 2021-04-21 | 블랙모어 센서스 앤드 애널리틱스, 엘엘씨 | 위상 인코딩 lidar에서의 내부 반사 감산을 위한 레이저 위상 추적 방법 및 시스템 |
| KR20220003167A (ko) * | 2018-11-13 | 2022-01-07 | 블랙모어 센서스 앤드 애널리틱스, 엘엘씨 | 위상 인코딩 lidar에서의 내부 반사 감산을 위한 레이저 위상 추적 방법 및 시스템 |
| US11656343B2 (en) | 2018-11-13 | 2023-05-23 | Blackmore Sensors & Analytics, Llc | Method and system for laser phase tracking for internal reflection subtraction in phase-encoded lidar |
| KR20200137086A (ko) * | 2019-05-28 | 2020-12-09 | 주식회사 에스원 | 반사판 레이저 감지기의 근거리 무감지 방지 시스템 및 이를 이용한 무감지 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20140169392A1 (en) | 2014-06-19 |
| US9048609B2 (en) | 2015-06-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20140079090A (ko) | 레이저 방출기 모듈 및 그것이 적용된 레이저 감지 시스템 | |
| US11988773B2 (en) | 2-dimensional steering system for lidar systems | |
| US20170261612A1 (en) | Optical distance measuring system and light ranging method | |
| CN108375762B (zh) | 激光雷达及其工作方法 | |
| US11422239B2 (en) | Lidar sensor for a lidar system | |
| US11561287B2 (en) | LIDAR sensors and methods for the same | |
| JP2022506031A (ja) | 再帰反射体のマッピングのための方法およびシステム | |
| WO2020163717A1 (en) | Ranging using a shared path optical coupler | |
| US10317530B2 (en) | Laser range finding apparatus | |
| US12117565B2 (en) | Methods and systems for dithering active sensor pulse emissions | |
| US12066573B2 (en) | Optoelectronic sensor and method for detecting an object | |
| KR20190066220A (ko) | 3차원 라이다 장치 및 거리측정 방법 | |
| US11237255B2 (en) | LiDAR system | |
| KR102578977B1 (ko) | 라이다 시스템 | |
| CN112912765A (zh) | 用于光学地检测视场的激光雷达传感器、具有激光雷达传感器的工作设备或者车辆和用于光学地检测视场的方法 | |
| KR20120069487A (ko) | 능동형 광 레이더 장치 | |
| CN110333500B (zh) | 一种多波束激光雷达 | |
| US20220155442A1 (en) | Light detection device, lidar device including the same, and method of measuring distance | |
| US11841433B2 (en) | Method and apparatus for determining at least one spatial position and orientation of at least one tracked measuring device | |
| CN110346779B (zh) | 一种用于多波束激光雷达的时间通道复用的测量方法 | |
| US20200014173A1 (en) | Light sensing system and electronic apparatus including the same | |
| US11506785B2 (en) | Asymmetric optical sensor device | |
| US9599697B2 (en) | Non-contact fiber optic localization and tracking system | |
| US20230042957A1 (en) | Lidar device | |
| KR20230133458A (ko) | 라이다 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |