KR20140051188A - Pedestrian navigation apparatus - Google Patents
Pedestrian navigation apparatus Download PDFInfo
- Publication number
- KR20140051188A KR20140051188A KR1020140004475A KR20140004475A KR20140051188A KR 20140051188 A KR20140051188 A KR 20140051188A KR 1020140004475 A KR1020140004475 A KR 1020140004475A KR 20140004475 A KR20140004475 A KR 20140004475A KR 20140051188 A KR20140051188 A KR 20140051188A
- Authority
- KR
- South Korea
- Prior art keywords
- user terminal
- access point
- information
- pedestrian
- route guidance
- Prior art date
Links
Images










Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/024—Guidance services
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/025—Services making use of location information using location based information parameters
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/029—Location-based management or tracking services
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/33—Services specially adapted for particular environments, situations or purposes for indoor environments, e.g. buildings
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W64/00—Locating users or terminals or network equipment for network management purposes, e.g. mobility management
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W88/00—Devices specially adapted for wireless communication networks, e.g. terminals, base stations or access point devices
- H04W88/08—Access point devices
Abstract
Description
본 발명은 보행자 경로안내 장치에 관한 것으로서, 구체적으로는 측위전용 액세스 포인트를 이용하여 사용자 단말의 위치를 추정하고, 상기 사용자 단말 및 상기 측위전용 액세스 포인트로부터 추정된 상기 사용자 단말의 위치 추정 정보를 이용하여 보행자 경로안내 서비스를 제공하는 보행자 경로안내 장치에 관한 것이다.
The present invention relates to a pedestrian route guidance apparatus, and more particularly, it relates to a pedestrian route guiding apparatus which estimates a position of a user terminal using a positioning dedicated access point and uses position estimation information of the user terminal estimated from the user terminal and the positioning dedicated access point Thereby providing a pedestrian route guidance service.
무선 기반 위치 시스템은 이미 보편적으로 사용 중인 무선랜(WLAN: Wireless LAN), 와이파이(Wi-Fi: Wireless Fidelity), 와이브로(Wireless Broadband Internet), 와이맥스(World Interoperability for Microwave Access), HSDPA(High Speed Downlink Packet Access), 지그비(Zigbee), 블루투스(Bluetooth), UWB(Ultra-wideband), IrDA(Infrared Data Association), 초광대역(Ultra Wild Band), SWAP(Shared Wireless Access Protocol), LTE(Long Term Evolution) 등을 이용하므로 비용측면에서 상당히 효과적이다. The wireless based positioning system can be used in various wireless communication systems such as a wireless LAN (WLAN), a wireless fidelity (Wi-Fi), a wireless broadband Internet, a World Interoperability for Microwave Access (HSDPA) Packet Access, Zigbee, Bluetooth, Ultra-wideband, IrDA, Ultra Wild Band, Shared Wireless Access Protocol (SWAP), Long Term Evolution (LTE) And so it is very effective in terms of cost.
통신 인프라의 한 부분인 무선 네트워크는 노트북 컴퓨터, PDA, 스마트폰 또는 다른 무선 모바일 장치를 통해, 위치 시스템을 구현할 수 있고 이러한 소프트웨어 기반 위치 솔루션은 실내 전용 위치 추적 구조보다 현저하게 저렴하다.A wireless network that is part of a communications infrastructure can implement a location system via a notebook computer, PDA, smart phone or other wireless mobile device, and such software based location solution is significantly less expensive than an indoor dedicated location tracking architecture.
종래에는 일반적으로 무선에 기반을 둔 측위기술들은 상대적으로 위치를 삼각측량하고 계산하기 위하여 무선노드(접근 포인트와 사용자)들 사이의 전파지연을 모니터링 하여 위치를 결정하는 방법을 사용한다. 현재 무선 위치 솔루션들에 대한 표준이 없으며, 또한 각 솔루션은 벤더(Vendor)에 특화되어 독자적인 특허기술을 사용하고 있으며, 사용자의 위치를 결정하는 것에 대한 세부적인 사항들은 공개하지 않고 있다.Conventionally, positioning techniques based on radio generally use a method of positioning by monitoring the propagation delay between a wireless node (access point and user) to triangulate and calculate the position relatively. There is currently no standard for wireless location solutions, and each solution uses proprietary patented technology that is specific to the vendor and does not disclose details about determining a user's location.
종래의 일반적인 실내 위치 추정에 관한 기술은 서비스 대상 지역을 격자로 분할하고 각각의 격자에 기지국 특성 데이터를 수집하여 데이터베이스화 한 다음 측위 요청한 단말에서 측정한 RF전파 특성 정보와 기 구축한 데이터 베이스의 정합 정도를 판단하여 가장 적합하게 정합되는 각자를 측위 결과로 선택하는 RF Fingerprint방식 및 기지국 간 신호세기의 차에 의해 위치를 계산하는 방식인 RSSI(Received Sigmal Strength Indicator)측위 방식 등으로 분류할 수 있다.
Conventional indoor location estimation techniques divide the service area into grids, collect the base station characteristic data in each grid, and store them in a database. Then, the base station compares the RF propagation characteristic information measured at the requested terminal with the pre- The RF fingerprinting method for selecting the most suitable matching result as the positioning result, and the RSSI (Received Sigmal Strength Indicator) positioning method for calculating the position based on the difference between the signal strengths between the base stations.
한국등록특허 [10-0775858]에서는 실내 무선 측위용 환경 분석 시스템 및 그 방법이 개시되어 있다.
Korean Patent No. 10-0775858 discloses an environment analysis system for indoor wireless positioning and a method thereof.
따라서, 본 발명은 상기한 바와 같은 문제점을 해결하기 위하여 안출된 것으로, 구체적으로는 측위를 전용으로 하는 하향링크 액세스 포인트 및 상향링크 액세스 포인트를 고정된 위치에 설치하여 사용자 단말의 위치를 측위하며, 위치 측위가 가능하지 않을 경우(전파를 송신 또는 수신 할 수 없는 경우) 추측항법(DR: Dead Reckoning)에 의한 위치 측위를 할 수 있어 전파 사각지대에서도 위치를 측위할 수 있어 설치 및 유지비용에 비해 정확한 위치를 추정할 수 있는 보행자 경로안내 장치를 제공함에 그 목적이 있다.SUMMARY OF THE INVENTION Accordingly, the present invention has been made keeping in mind the above problems occurring in the prior art, and an object of the present invention is to provide a method and apparatus for locating a user terminal by locating a downlink access point and an uplink access point dedicated for positioning, If positional positioning is not possible (when it can not transmit or receive radio waves), positioning can be performed by dead reckoning (DR), so positioning can be done even in a blind spot. And it is an object of the present invention to provide a pedestrian route guide device capable of estimating an accurate position.
또한, 기존의 통신 인프라를 활용하여 소프트웨어 기반 위치 솔루션을 구축할 수 있는 보행자 경로안내 장치를 제공함에 다른 목적이 있다.Another purpose is to provide a pedestrian path guide device capable of utilizing a conventional communication infrastructure to build a software-based location solution.
또, 정확한 목적지를 모를 경우에도 검색을 통해 목적지를 선택하여 서비스를 제공 받을 수 있는 보행자 경로안내 장치를 제공함에 또 다른 목적이 있다.Another object of the present invention is to provide a pedestrian route guide device capable of selecting a destination and providing a service through search even when the exact destination is unknown.
또한, 고객관리 서버를 이용한 고객 관리를 통해 고객에게 필요한 정보를 능동적으로 제공할 수 있는 보행자 경로안내 장치를 제공함에 또 다른 목적이 있다.Another object of the present invention is to provide a pedestrian route guidance device capable of actively providing necessary information to a customer through customer management using a customer management server.
아울러, 시스템 유지관리 서버를 이용하여 적은 유지비용으로 효율적인 관리가 가능한 보행자 경로안내 장치를 제공함에 또 다른 목적이 있다.
Another object of the present invention is to provide a pedestrian route guiding apparatus capable of efficiently managing the system maintenance server at a low maintenance cost.
상기한 바와 같은 문제점을 해결하기 위한 본 발명의 일 실시예에 따른 보행자 경로안내 장치에 있어서, 사용자에게 경로안내 정보를 제공하는 사용자 단말(100); 실내에 배치되며, 상기 사용자 단말(100)의 위치를 추정하기 위한 정보를 상기 사용자 단말(100)과 무선으로 통신하는 적어도 하나의 측위전용 액세스 포인트(200); 및 상기 사용자 단말(100) 및 상기 측위전용 액세스 포인트(200)와 무선으로 통신하며, 상기 사용자 단말(100) 및 상기 측위전용 액세스 포인트(200)로부터 추정된 상기 사용자 단말(100)의 위치 추정 정보를 이용하여 보행자 경로안내 서비스를 제공하는 보행자 경로안내 서버(300);를 포함하여 구성된다.In order to solve the above problems, the present invention provides a pedestrian route guiding apparatus comprising: a user terminal (100) for providing route guidance information to a user; At least one positioning dedicated access point (200) arranged in the room for wirelessly communicating information for estimating the position of the user terminal (100) with the user terminal (100); And a wireless communication unit for wirelessly communicating with the
또, 상기 보행자 경로안내 장치는 상기 사용자 단말(100)의 자이로 센서, 지자기 센서 및 페도메터(Pedometer) 센서 중 선택되는 적어도 어느 하나를 이용하여 오차를 보정하는 것을 특징으로 한다.In addition, the pedestrian path guide device may correct errors using at least one selected from a gyro sensor, a geomagnetic sensor, and a pedometer sensor of the
아울러, 상기 측위전용 액세스 포인트(200)는 설치 좌표정보, 특성정보, 고유식별자 및 섹터정보 중 선택되는 적어도 하나의 액세스 포인트(Access Point)정보가 포함된 위치정보를 상기 사용자 단말(100)로 송출 하는 하향링크 방식인 하향링크 액세스 포인트(210);를 포함하여 구성되는 것을 특징으로 한다.
In addition, the positioning
본 발명의 일 실시예에 따른 보행자 경로안내 장치에 의하면, 측위를 목적으로 하는 측위전용 액세스 포인트(200)를 이용하여 측위를 함으로써, 설치비 및 유지 관리 비용을 감축하고, 하나의 측위전용 액세스 포인트(200)만으로도 사용자 단말(100)의 위치추정이 가능한 효과가 있다. 또한, 상기 측위전용 액세스 포인트(200)의 전파를 송신 또는 수신 할 수 없는 경우에도 추측항법(DR: Dead Reckoning)에 의한 위치 측위를 할 수 있어 전파 사각지대에서도 실시간 위치를 측위 할 수 있는 효과가 있으므로 적은 비용으로 실내 위치 추정에 효율적인 장치를 제공할 수 있다는 장점이 있다.According to the pedestrian route guidance apparatus according to the embodiment of the present invention, positioning and exclusive use of a positioning dedicated access point (200) for positioning purpose reduces installation cost and maintenance cost, 200 can be used to estimate the position of the
또, 기존의 통신 인프라를 활용하여 소프트웨어 기반 위치 솔루션을 구축할 수 있어 적은 비용으로 최대의 효과를 볼 수 있다는 효과가 더욱 뛰어나다.In addition, the existing communication infrastructure can be used to build a software-based location solution, which has the effect of maximizing the effect at low cost.
또한, 정확한 목적지를 모를 경우에도 검색을 통해 목적지를 선택하여 서비스를 제공 받을 수 있는 장점이 있다.Also, even if the exact destination is not known, there is an advantage that the service can be provided by selecting the destination through the search.
또, 고객관리 서버를 이용한 고객 관리를 통해 고객에게 필요한 정보를 능동적으로 제공하는 장점이 있다.In addition, there is an advantage that information necessary for a customer is actively provided through customer management using a customer management server.
아울러, 시스템 유지관리 서버를 이용하여 적은 유지비용으로 효율적인 관리가 가능한 장점이 있다.
In addition, there is an advantage in that it can be efficiently managed with a low maintenance cost by using a system maintenance server.
도 1은 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 개념도.
도 2는 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 세부 개념도.
도 3은 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 하향링크 액세스 포인트의 배치 예시도.
도 4는 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 하향링크 액세스 포인트의 송출기 전파 배치 예시도.
도 5는 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 하향링크 액세스 포인트의 이동 궤적 추정 예시도.
도 6은 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 하향링크 액세스 포인트의 이동 궤적 추정을 위한 프로파일 예시도.
도 7은 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 상향링크 액세스 포인트의 안테나가 두 개일 경우 도달 각도와 거리를 계산하는 알고리즘 예시도.
도 8은 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 상향링크 액세스 포인트의 안테나가 세 개일 경우 도달 각도와 거리를 계산하는 알고리즘 예시도.
도 9는 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 상향링크 액세스 포인트의 안테나가 세 개일 경우 위치 추정 알고리즘 예시도.
도 10은 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 하향링크 액세스 포인트를 이용한 위치추정 프로토콜.
도 11은 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 상향링크 액세스 포인트를 이용한 위치추정 프로토콜.1 is a conceptual diagram of a pedestrian route guidance apparatus according to an embodiment of the present invention;
2 is a detailed schematic diagram of a pedestrian path guide apparatus according to an embodiment of the present invention.
3 is a diagram illustrating an example of a layout of a downlink access point of a pedestrian route guidance apparatus according to an embodiment of the present invention.
4 is a diagram illustrating an example of the arrangement of a radiator of a radiator of a downlink access point of a pedestrian path guide apparatus according to an embodiment of the present invention.
5 is a diagram illustrating an example of a trajectory estimation of a downlink access point of a pedestrian route guidance apparatus according to an embodiment of the present invention.
6 is an exemplary view illustrating a profile for estimating a movement trajectory of a downlink access point of a pedestrian route guidance apparatus according to an embodiment of the present invention.
FIG. 7 is an example of an algorithm for calculating an arrival angle and a distance when two antennas of an uplink access point of a pedestrian path guide apparatus according to an embodiment of the present invention are used; FIG.
FIG. 8 illustrates an example of an algorithm for calculating an arrival angle and a distance when three antennas of an uplink access point of a pedestrian path guide apparatus according to an exemplary embodiment of the present invention. FIG.
9 is a diagram illustrating an example of a position estimation algorithm when there are three antennas of an uplink access point of a pedestrian route guidance apparatus according to an embodiment of the present invention.
10 is a position estimation protocol using a downlink access point of a pedestrian path guide apparatus according to an embodiment of the present invention.
11 is a position estimation protocol using an uplink access point of a pedestrian route guidance apparatus according to an embodiment of the present invention.
이하, 본 발명의 바람직한 실시 예에 따른 보행자 경로안내 장치는 첨부한 도면을 참조하여 상세하게 설명하면 다음과 같다.DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS Hereinafter, a pedestrian route guidance apparatus according to a preferred embodiment of the present invention will be described in detail with reference to the accompanying drawings.
도 1은 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 개념도이고, 도 2는 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 세부 개념도이며, 도 3은 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 하향링크 액세스 포인트의 배치 예시도이고, 도 4는 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 하향링크 액세스 포인트의 송출기 전파 배치 예시도이며, 도 5는 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 하향링크 액세스 포인트의 이동 궤적 추정 예시도이고, 도 6은 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 하향링크 액세스 포인트의 이동 궤적 추정을 위한 프로파일 예시도이며, 도 7은 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 상향링크 액세스 포인트의 안테나가 두 개일 경우 도달 각도와 거리를 계산하는 알고리즘 예시도이고, 도 8은 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 상향링크 액세스 포인트의 안테나가 세 개일 경우 도달 각도와 거리를 계산하는 알고리즘 예시도이며, 도 9는 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 상향링크 액세스 포인트의 안테나가 세 개일 경우 위치 추정 알고리즘 예시도이고, 도 10은 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 하향링크 액세스 포인트를 이용한 위치추정 프로토콜이며, 도 11은 본 발명의 일 실시예에 따른 보행자 경로안내 장치의 상향링크 액세스 포인트를 이용한 위치추정 프로토콜이다.FIG. 1 is a conceptual diagram of a pedestrian path guide apparatus according to an embodiment of the present invention. FIG. 2 is a conceptual diagram illustrating a pedestrian path guide apparatus according to an embodiment of the present invention. FIG. 4 is a diagram illustrating an example of the arrangement of a radio wave of a transmitter of a downlink access point of a pedestrian path guide apparatus according to an embodiment of the present invention. 6 is a view illustrating a profile for estimating a movement trajectory of a downlink access point of a pedestrian route guidance apparatus according to an embodiment of the present invention. FIG. 6 is a diagram illustrating an example of a profile for estimating a trajectory of a downlink access point in a pedestrian route guidance apparatus according to an embodiment of the present invention. And FIG. 7 is a graph showing the relationship between the arrival angle and the distance when two antennas of the uplink access point of the pedestrian route guidance apparatus according to the embodiment of the present invention are used, FIG. 8 is an exemplary diagram illustrating an algorithm for calculating an arrival angle and a distance when three antennas of an uplink access point of a pedestrian path guide apparatus according to an embodiment of the present invention are used. FIG. 10 is a diagram illustrating an example of a position estimation algorithm when the number of antennas of the uplink access point of the pedestrian path guide apparatus according to an embodiment of the present invention is three, 11 is a position estimation protocol using an uplink access point of a pedestrian route guidance apparatus according to an embodiment of the present invention.
도 1에 도시된 바와 같이, 본 발명에 따른 보행자 경로안내 장치는 사용자 단말(100), 측위 전용 액세스 포인트(200) 및 보행자 경로안내 서버(300)를 포함하여 구성된다.1, the pedestrian route guidance apparatus according to the present invention includes a
사용자 단말(100)은 사용자에게 경로안내 정보를 제공한다. The
측위전용 액세스 포인트(200)는 실내에 배치되며, 상기 사용자 단말(100)의 위치를 추정하기 위한 정보를 상기 사용자 단말(100)과 무선으로 통신하는 적어도 하나로 구성된다. The positioning
도 2에 도시된 바와 같이, 상기 측위전용 액세스 포인트(200)는 설치 좌표정보, 특성정보, 고유식별자 및 섹터정보 중 선택되는 적어도 하나의 액세스 포인트(Access Point)정보가 포함된 위치정보를 상기 사용자 단말(100)로 송출 하는 하향링크 방식인 하향링크 액세스 포인트(210)를 포함하여 구성될 수 있다. 여기서, 상기 특성정보는 상기 위치정보 송신장치가 설치된 지점의 지형 특성을 나타내며, 출입구, 복도, N방향 분기점(N은 2 이상의 자연수), 로비, 계단, 엘리베이터로비 등의 정보를 포함할 수 있다. 예를 들면, 도 3에 도시된 바와 같이, 상기 위치정보 송신장치가 설치된 지점의 지형 특성을 나타낼 수 있다. 건물 외부로 통하는 입구의 액세스 포인트는 GPS(Global Positioning System) 절대 좌표 정보를 추가로 제공하여 실내와 실외의 연속 이동 궤적의 추적이 가능하도록 할 수 있다. 또한, 하향링크 방식은 상기 사용자 단말(100)의 위치를 추정하기 위해 상기 측위전용 액세스 포인트(210)에서 송출하는 상기 위치정보를 상기 사용자 단말(100)에서 입력 받는 방식을 말하며, 상기 사용자 단말(100)에서 상기 위치정보를 이용하여 상기 사용자 단말(100)의 현재 위치를 추정할 수 있다.2, the positioning
하향링크 액세스 포인트(210)에 대하여 설명하면, 상기 하향링크 액세스 포인트(210)에서 상기 사용자 단말(100)로 상기 위치정보를 출력 하고 상기 사용자 단말(100)에서 상기 위치정보 중 상기 하향링크 액세스 포인트(210)의 설치 좌표정보로 상기 사용자 단말(100)의 대략적 위치 파악이 기능할 수 있다. 그 이유는 상기 하향링크 액세스 포인트(210)의 설치 위치를 상기 설치 좌표정보로 알려주고 상기 하향링크 액세스 포인트(210)의 전파 송출 범위가 한정적이기 때문에 설치 좌표정보로 대략적인 위치 추정이 가능하다. 만약 설치 좌표정보를 보행자 경로안내 서버(300)에서 일괄 관리하며 상기 하향링크 액세스 포인트(210)는 고유식별자 정보를 방출 한다면 상기 사용자 단말(100)에서 상기 고유식별자 정보를 수신하고 상기 경로안내 서버에 상기 고유식별자 정보를 갖는 상기 하향링크 액세스 포인트(210)의 설치 위치 정보를 요청하여 상기 사용자 단말(100)의 위치 추정이 가능할 수 있다.The
도 4에 도시된 바와 같이, RSSI(received signal strength index) 정보를 같이 이용할 경우 상기 하향링크 액세스 포인트(210)에서 떨어진 거리 추정도 가능하다. 이때, 전파를 방출하는 송출기가 하나로 구성되며 지면에 수직인 방향으로 전파를 방출하는 경우 같은 RSSI 인 곳이 대칭적으로 존재하므로 RSSI 값 사용 시 위치에 대한 모호성(ambiguity)이 존재할 수 있다.As shown in FIG. 4, if the received signal strength index (RSSI) information is used together, it is also possible to estimate the distance away from the DL AP 210. FIG. At this time, when the radiator that emits the radio waves is composed of one and emits the radio wave in the direction perpendicular to the ground, since the same RSSI exists symmetrically, there may be ambiguity about the position when using the RSSI value.
이때, 상기 송출기를 비스듬한 방향으로 설치하여 전파를 출력 하면 전파 파형에 방향성이 있으므로 RSSI이용한 거리 추정 시 위치에 대한 모호성을 감소시킬 수 있다.At this time, when the radiator is installed in an oblique direction and a radio wave is output, since the radio wave has a directionality, it is possible to reduce the ambiguity about the position when estimating the distance using RSSI.
또한, 인접한 액세스 포인트간에 간섭 없이 송출 데이터를 출력 하여 하향링크 액세스 포인트(210)간의 간섭을 방지할 수 있다. 이때, 서로 다른 비스듬한 방향으로 송출 데이터를 출력함으로 사용자 단말(100)이 향한 위치와 이동 방향 정보 추정이 가능하다. (사용자가 향한 방향에 따라 수신 신호 세기가 다른 성질을 이용)In addition, it is possible to prevent interference between the
상기 하향링크 액세스 포인트(210)의 송출기가 하나로 구성될 경우, 상기 송출기의 통신 가능 영역 내에서 상기 송출 데이터를 연속으로 수신한 n개(n은 자연수)의 신호를 입력으로 시간의 흐름에 따른 상기 송출 데이터의 신호 프로파일을 통해 상기 사용자 단말(100)의 이동 궤적을 추정 할 수 있다. 예를 들면, 도 5에 도시된 바와 같이,When the transmitter of the
다음 식The following equation

(R1은 사용자 단말(100)과 1번째 신호를 수신한 하향링크 액세스 포인트(210)의 거리, R2는 사용자 단말(100)과 2번째 신호를 수신한 하향링크 액세스 포인트(210)의 거리, R12는 1번째 신호를 수신한 하향링크 액세스 포인트(210)와 2번째 신호를 수신한 하향링크 액세스 포인트(210)의 거리, f는 신호세기 입력에 대한 출력을 거리로 계산해 주는 함수, PTX는 송출신호의 세기, PRX1은 1번째 수신 신호의 세기, PRX2는 2번째 수신 신호의 세기, Vwalk은 이동 속도, T1은 1번째 신호의 수신 시각, T2는 2번째 신호의 수신 시각, s는 헤론의 공식에 의해 정의된 변수 , Aarea는 삼각형의 넓이, Rb는 상기 사용자 단말(100)과 상기 하향링크 액세스 포인트(210) 사이의 거리)(R1 is a distance of the
을 이용하여 상기 하향링크 액세스 포인트(210)와 상기 사용자 단말(100) 사이의 거리를 구하여 위치를 추정할 수 있다.The distance between the
또한, 하향링크 액세스 포인트(210)의 송출기가 적어도 둘로 구성될 경우, 상기 송출기들의 통신 가능 영역 내에서 상기 위치정보를 연속으로 수신한 n개(n은 자연수)의 신호를 입력으로 시간의 흐름에 따른 각각의 상기 송출 데이터의 신호 프로파일의 비교를 통해 상기 사용자 단말(100)의 이동 궤적을 추정 할 수 있다. 예를 들면, 하향링크 액세스 포인트(210) 관점에서 사용자 단말(100)이 하향링크 액세스 포인트(210)로 다가오고 있을 경우 RSS(received signal strength) 값은 증가하게 된다. 상기 각각의 송출기의 RSS 신호를 상기 사용자 단말(100)에서 수신하여 상기 각각의 송출기의 RSS 신호를 비교하여 이동 궤적을 추정할수 있다. 이때 RSS 신호를 적분할 경우 기울기가 증가하는 그래프로 나타난다. 반대로 사용자 단말(100)에서 멀어질 경우 RSS 적분 신호는 기울기가 감소하는 형태로 나타난다. 이런 신호 형태를 기반으로 이동 궤적을 추정할 수 있다. 상기 각각의 송출기의 RSS 신호의 차이를 비교하거나 상기 각각의 송출기의 RSS 신호를 적분하여 적분결과의 파형 및 첨두치를 이용하여 이동 궤적을 결정 할 수 있다.When the transmitter of the
예를 들면, 하향링크 액세스 포인트(210)의 관점에서 사용자 단말(100)이 액세스 포인트로 다가오고 있을 경우 RSS 값은 증가하게 된다. 시간에 따른 RSS 차이 값을 비교함으로써 이동 방향을 알 수 있다. 이때 RSS 신호를 적분할 경우 기울기가 증가하는 그래프로 나타난다. 반대로 액세스 포인트에서 멀어질 경우 RSS 적분 신호는 기울기가 감소하는 형태로 나타난다. 이런 신호 형태를 기반으로 이동 방향을 추정할 수 있다. For example, if the
다음에 사용자 단말(100)이 이동 궤적을 추정하는 구체적 방법에 대해 예를 들어 설명한다. 송출기 A와 송출기 B의 두 개로 하향링크 액세스 포인트(210)가 구성될 경우Next, a concrete method of estimating the movement trajectory of the
송출기A와 송출기B의 신호세기(RSS)를 t1, t2, t3, … 시간마다 측정한다.The signal strength (RSS) of the transmitter A and the transmitter B is t1, t2, t3, ... Measure every hour.
이를 그래프로 나타내면 도 6 (a)와 같다. 여기서 본 이동방향 추정방법이 구동되기 위해서는 RSS_A와 RSS_B가 RSS 임계값보다 큰 값을 가져야 하며 이를 만족하는 시간영역(즉, '사용되는 RSS 수집구간') 동안 이동 궤적을 추청할 수 있다. 수집된 RSS_A와 RSS_B를 이용하여 이동궤적을 추정하게 된다. 도 6 (b)는 RSS_A와 RSS_B의 차 값에 대한 그래프이다. 그래프에서 시간의 흐름에 따라 값이 0에서 양수값으로 커진 후 음수가 되고 0으로 수렴하는 프로파일이 감지되면 사용자 단말(100)이 RSS_A에서 RSS_B 쪽 방향으로 이동하는 것으로 판단할 수 있고, 그래프에서 시간의 흐름에 따라 값이 0에서 음수값으로 작아진 후 양수가 되고 0으로 수렴하는 프로파일이 감지되면 사용자 단말(100)이 RSS_B에서 RSS_A 쪽 방향으로 이동하는 것으로 판단할 수 있다.This graph is shown in FIG. 6 (a). Here, in order to operate the moving direction estimation method, RSS_A and RSS_B must have a larger value than the RSS threshold value, and the moving locus can be estimated during the time domain (i.e., the 'RSS collection interval used') satisfying the RSS_A and RSS_B. The moving trajectory is estimated using the collected RSS_A and RSS_B. 6 (b) is a graph of the difference value between RSS_A and RSS_B. In the graph, when a value is increased from 0 to a positive value and then a negative convergence profile is detected, it can be determined that the
도 6 (c)는 RSS_A와 RSS_B의 차 값의 적분값에 대한 그래프이다. 그래프에서 첨두치가 양수이면 수신장치의 이동방향이 사용자 단말(100)이 RSS_A에서 RSS_B 쪽 방향으로 이동하는 것으로 판단할 수 있고, 그래프에서 첨두치가 음수이면 사용자 단말(100)이 RSS_B에서 RSS_A 쪽 방향으로 이동하는 것으로 판단할 수 있다.6 (c) is a graph of the integrated value of the difference between RSS_A and RSS_B. If the peak value is positive in the graph, the moving direction of the receiving apparatus can be determined to move from the RSS_A to the RSS_B direction, and if the peak value is negative in the graph, the
도 2에 도시된 바와 같이, 상기 측위전용 액세스 포인트(200)는 설치 좌표정보, 특성정보, 섹터정보, 고유식별자, 신호의 생성 시각, 주기적으로 신호가 송출되는 시간 간격, 통신속도, 기능 및 액세스 포인트(AP) 타입 중 선택되는 적어도 하나의 통신용 정보를 송출하고, 상기 사용자 단말(100)의 고유식별자 및 기능 중 선택되는 적어도 하나의 위치식별용 정보를 수신 받으며, 상기 사용자 단말(100)로부터 수신 받은 상향링크 신호를 이용하여 신호 도달각도를 측정하고 RSSI(Received Signal Strength Indication)를 이용하여 거리를 측정하여 위치를 추정하는 상향링크 방식인 상향링크 액세스 포인트(220)를 포함하여 구성될 수 있다. 여기서, 상향링크 방식은 상기 사용자 단말(100)의 위치를 추정하기 위해 상기 사용자 단말(100)에서 송출하는 위치식별용 정보를 상기 상향링크 액세스 포인트(220)에서 입력 받는 방식을 말하며, 상기 상향링크 액세스 포인트(220)에서 위치식별용 정보를 이용하여 상기 사용자 단말(100)의 현재 위치를 추정할 수 있다.As shown in FIG. 2, the positioning
상향링크 액세스 포인트(220)에 대하여 설명하면, 상기 사용자 단말(100)에서 상기 상향링크 액세스 포인트(220)로 상기 위치식별용 정보를 출력 하고 상기 사용자 단말(100)에서 상기 위치식별용 정보를 수신한 상기 상향링크 액세스 포인트(220)의 설치 좌표정보로 상기 사용자 단말(100)의 대략적 위치 파악이 기능할 수 있다. 그 이유는 상기 상향링크 액세스 포인트(220)의 설치 위치를 상기 설치 좌표정보로 알 수 있고 상기 사용자 단말(100)의 전파 송출 범위가 한정적이기 때문에 전파 수신강도가 가장 높은 상향링크 액세스 포인트(220)의 설치 좌표정보로 대략적인 위치 추정이 가능하다. 좀 더 정확한 사용자 단말(100)의 위치를 추정하기 위해서는 상기 상향링크 액세스 포인트(220)가 상기 사용자 단말(100)의 고유식별자 정보를 수신하여 상향링크 신호를 이용하여 거리 및 도달각도를 추정할 수 있다. 이때, 거리를 추정하는 방법은 전파 도달시간을 이용한 방법, RSSI(Received Signal Strength Indication)를 이용한 방법, 고속 푸리에 변환을 이용한 방법 등이 있고, 도달각도를 추정하는 방법은 전파를 송신 및 수신하는 적어도 두 개의 안테나를 이용한 방법 등이 있다. The
거리를 추정하는 방법에 대하여 설명하면, 상기 사용자 단말(100)로부터 전파를 발생한 시간을 포함한 위치식별용 정보를 상기 상향링크 액세스 포인트(220)가 입력받아 상기 위치식별용 정보가 도착한 시간을 이용하여 정보의 도달시간을 계산하고 계산된 도달시간을 이용하여 거리를 추정할 수 있고, RSSI의 신호의 세기를 이용하여 거리가 멀어질수록 신호의 세기가 약해지는 특성을 이용한 방법 등이 있다.A method of estimating the distance may be performed by using the time at which the
다음으로 도달각도를 추정하는 방법에 대하여 설명하면, 도 7에 도시된 바와 같이 상기 상향링크 액세스 포인트(220)는 안테나가 2개로 구성될 경우, 두 개의 안테나에서 획득한 신호(여기에서 획득한 신호가 RSSI 신호를 말하는 것인지 설명 부탁드립니다.)를 고속 푸리에 변환(FFT)한 결과를 R1(f), R2(f)라 할때,Next, as shown in FIG. 7, when the
다음식Da food

(위 수식에서 각각의 기호가 의미하는 바에 대한 설명 부탁드립니다.)을 이용하여 위상차를 구하고, (Please explain the meaning of each symbol in the above formula) to obtain the phase difference,
다음식Da food

(위 수식에서 각각의 기호가 의미하는 바에 대한 설명 부탁드립니다.)(Please explain what each symbol means in the above formula.)
을 이용하여 도달 각도를 추정할 수 있다.Can be used to estimate the reach angle.
이때, 다음식At this time,
![]()
![]()
(위 수식에서 각각의 기호가 의미하는 바에 대한 설명 부탁드립니다.)(Please explain what each symbol means in the above formula.)
을 이용하여 거리를 구할 수 있다. 다시 말해, 복도와 같이 단순하고 좁은 구조의 지형에서는 두 개의 안테나로 구성된 하나의 상향링크 액세스 포인트(220)를 이용하여 2D 형태로 거리와 도달 각도를 계산함으로 상기 사용자 단말(100)의 위치를 추정할 수 있다.Can be used to find the distance. In other words, in a simple and narrow terrain such as a corridor, the distance and the arrival angle are calculated in 2D form using one
여기서, 상기 상향링크 액세스 포인트(220)는 상기 두 개의 안테나의 거리보다 신호의 파장이 짧을 경우 파장의 배수 길이마다 발생하는 모호성(ambiguity)을 방지하기 위해 주파수에 대한 ![]()
![]()
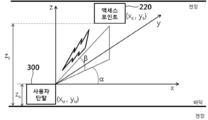
도 8에 도시된 바와 같이, 상기 상향링크 액세스 포인트(220)는 상기 안테나가 적어도 3개 이상으로 구성될 수 있으며 각각의 안테나가 일직선상에 위치하지 않을 경우, 8, the
다음식Da food

을 이용하여 각각의 고도 각과 방위 각(α, β)을 구하고, To obtain respective altitude angles and azimuth angles (alpha, beta)
도 9에 도시된 바와 같이, As shown in Fig. 9,
다음식Da food

을 이용하여 위치를 계산할 수 있다. 다시 말해, 넓은 광장과 같은 복잡한 구조의 지형에서는 세 개 이상의 안테나로 구성된 하나의 상향링크 액세스 포인트(220)를 이용하여 3D 형태로 거리, 고도 각 및 방위각을 구함으로 사용자 단말(100)의 위치를 추정할 수 있다.Can be used to calculate the position. In other words, in a terrain having a complex structure such as a wide square, the distance, elevation angle, and azimuth angle are obtained in 3D form using one
상기 상향링크 액세스 포인트(220)에서 계산된 도달각도와 거리는 경쟁 제한 구간 동안 상기 사용자 단말(100)로 보내질 수 있다.The reach angle and distance calculated in the
상기 상향링크 액세스 포인트(220)에서 계산된 정보를 사용자 단말(100)로 보내는 방법은 상기 상향링크 액세스 포인트(220)를 이용하여 직접 보내는 방법, 보행자 경로 안내 서버(300)를 이용하여 일반 상용 WiFi 액세스 포인트를 통해서 정보를 보내는 방법 및 보행자 경로 안내 서버(300)를 이용하여 외부 3G, 4G망을 통해서 정보를 보내는 방법 등 3가지 정도로 예를 들 수 있다.The method of sending the calculated information from the
보행자 경로 안내 서버(300)를 이용하여 일반 상용 WiFi 액세스 포인트를 통해서 정보를 보내는 방법과 보행자 경로 안내 서버(300)를 이용하여 외부 3G, 4G망을 통해서 정보를 보내는 방법의 경우 상기 상향링크 액세스 포인트(220)가 계속 위치추정을 수행하는 동안 계산된 정보는 보행자 경로 안내 서버(300)를 통해 전달하기 때문에 상기 상향링크 액세스 포인트(220)에 부담이 적으나 보행자 경로 안내 서버(300)를 통해 정보 전달하려는 사용자 단말(100)을 모르기 때문에 상기 사용자 단말(100)에 대한 정보를 관리하고 있는 상기 상향링크 액세스 포인트(220)를 통해 고유 식별자를 확인한 다음 보내야 한다. 이를 위해 상기 상향링크 액세스 포인트(220)는 사용자 단말(100)의 위치를 추정하기 전에 보행자 경로 안내 서버(300)에 사용자 단말(100)에 대한 정보가 등록 되어 있어야 한다.In a method of transmitting information through a general commercial WiFi access point using the pedestrian
계산된 도달각도와 거리는 상기 상향링크 액세스 포인트(220)가 직접 무선통신망(WLAN)으로 신호를 경쟁 제한 구간에 사용자 단말(100)로 보낼 수 있다. 보행자 경로 안내 서버(300)를 이용할 경우 계산된 도달각도와 거리는 와이브로, 와이맥스, LTE 등의 다른 통신을 통하여 보행자 경로 안내 서버(300)를 경유하고 사용자 단말(100)로 보내질 수 있다.The calculated reach angle and distance may be transmitted by the
본 발명은 측위를 목적으로 하는 측위전용 액세스 포인트(200)를 이용하여 측위를 함으로써, 설치비 및 유지 관리 비용을 감축하고, 하나의 측위전용 액세스 포인트(200)만으로도 사용자 단말(100)의 위치추정이 가능한 효과가 있다. The present invention can reduce the installation cost and the maintenance cost by performing positioning using the positioning dedicated
상기 상향링크 액세스 포인트(220)의 주기적으로 신호가 송출되는 시간 간격은 CSMA/CA(Carrier Sense Multiple Access/Collision Avoidance)등과 같은 충돌 방지 기법으로 통신하는 경우 충돌을 방지할 수 있는 시간대를 확인하여 통신하기 위함이다. 보다 상세하게 설명하자면, 상기 상향링크 액세스 포인트(220)의 전체적인 통신 주기 중 전파를 수신 받지 않는 시간대인 경쟁제한 구간 동안은 상기 상향링크 액세스 포인트(220)가 통신용 정보를 무선으로 송출하고, 전파를 수신 받는 시간대인 경쟁구간 동안 상기 사용자 단말(100)이 위치식별용 정보를 무선으로 송출하여 상기 상향링크 액세스 포인트(220)와 상기 사용자 단말(100) 간의 충돌을 방지할 수 있다.The time interval during which the signal is periodically transmitted by the
상기 측위전용 액세스 포인트(200)의 전파를 송신 또는 수신 할 수 없는 경우에도 추측항법(DR: Dead Reckoning)에 의한 위치 측위를 할 수 있어, 전파 사각지대에서도 실시간 위치를 측위할 수 있는 추측항법에 대하여 설명하면, 스마트폰 등의 모바일 기기에 탑재된 DR 센서(지자기 센서, 가속도계, 자이로 등)를 이용하여 보행자용 추측항법 소프트웨어를 탑재하여 추측항법을 수행 할 수 있다.It is possible to perform positioning by dead reckoning (DR) even when the radio wave of the positioning
예를 들면, 스마트폰 등의 모바일 기기에 탑재된 가속도계 또는 보수계(pedometer)를 이용하여 보행 시 발생하는 신호를 탐지하여 발걸음 수를 측정하고 예측된 보폭을 곱하여 진행한 거리를 측정하여 추측항법을 수행 할 수 있다. 여기서 보폭의 계산 및 보정은 사용자의 이동 거리를 발걸음 수로 나눈 값을 이용하여 추정 할 수 있다. 또한 상기 측위전용 액세스 포인트(200)와 추측항법의 결과를 이용하여 보폭 추정의 스케일 팩터(scale factor) 오차를 보정할 수 있다. 또한, 지자기 센서를 이용하여 방향을 측정하고 이를 이용하여 추측항법을 수행할 수 있다. 또, 진행거리와 방향을 이용한 추측항법을 수행하는 것도 가능하다. 또한, 스마트폰 등의 모바일 기기에 탑재된 가속도계 또는 경사센서(tilt sensor)를 이용하여 사용자가 들고 있는 스마트폰 등의 모바일 기기의 자세 정보를 이용한 추측항법을 수행하는 것도 가능하다. 아울러 지도정합 정보 및 사용자 방향 등을 이용하여 잘못된 보행자의 위치를 보정할 수 있다. For example, by using an accelerometer or a pedometer mounted on a mobile device such as a smart phone, a signal generated during walking is detected, and the number of steps is measured, and the distance traveled is measured by multiplying the estimated stride, can do. Here, the calculation and correction of the stride can be estimated by using the value obtained by dividing the moving distance of the user by the number of steps. In addition, the scale factor error of the stride estimation can be corrected using the results of the positioning
상기 측위전용 액세스 포인트(200)는 조명기구 등의 일반 전원을 사용하는 전기기구 인근 혹은 일체형으로 설치하여 전기기구의 전원을 이용하는 것을 특징으로 할 수 있다.The positioning
도 2에 도시된 바와 같이, 보행자 경로안내 서버(300)는 상기 사용자 단말(100) 및 상기 측위전용 액세스 포인트(200)와 무선으로 통신하며, 상기 사용자 단말(100) 및 상기 측위전용 액세스 포인트(200)로부터 추정된 상기 사용자 단말(100)의 위치 추정 정보를 이용하여 보행자 경로안내 서비스를 제공한다. 이때, 보행자 경로안내 서버(300)는 실내 항법지도 서버(310) 및 점포 안내정보 서버(320)를 포함하여 구성될 수 있다.2, the pedestrian
실내 항법지도 서버(310)는 지도정합에 사용되는 지도정합용 지도, 경로계산에 사용되는 경로계산용 지도, 경로안내에 사용되는 경로안내용 지도 및 디스플레이에 사용되는 디스플레이용 지도 중 선택되는 적어도 어느 하나의 실내 항법지도를 관리하며, 상기 사용자 단말(100)과 연결되어 상기 사용자 단말(100)에서 보행자 경로안내를 요청하면 관련된 지도를 제공한다. The indoor
상기 지도에 사용되는 용어 중 링크는 복도와 같이 보행자가 이동하는 통로를 의미하며, 노드는 교차로와 같이 두 개 이상의 링크가 만나는 지점 및 링크의 끝(예를 들어 건물 외부 출입문 등)을 의미한다.Among the terms used in the map, a link means a passage through which a pedestrian moves, such as a corridor, and a node means a point where two or more links meet, such as an intersection, and an end of a link (for example, a door outside a building).
지도정합용 지도는 상기 액세스 포인트(200)를 이용한 측위 및 상기 사용자 단말(100)의 추측항법을 이용한 측위 정보(상기 사용자 단말(100)의 위치정보)를 이용하여 상기 사용자 단말(100)이 지도상의 어느 통로에 위치하였는지 결정하기 위해 사용된다. 지도 정합에는 링크 형상, 보행자 진행방향, 액세스 포인트의 위치, 특수 정보 등이 이용되며 지도 정합이 이루어져야 사용자 위치로부터 목적지까지의 경로 계산 및 경로 안내가 가능하다. 이때, 특수정보는 지자기 센서의 값 등이 될 수 있다. 철골 구조물 근처에서의 지자기 센서의 값이 급격히 커지는 현상을 이용하여 지자기 센서의 값으로 상기 사용자 단말(100)이 철골 구조물 근처에 있는지 판단이 가능하다.The map for map matching is obtained by using the positioning using the
경로계산용 지도는 링크(통로)와 노드(교차로)의 연결 상태를 나타내는 보행자 통로 네트워크를 이용하면 보행자가 위치한 통로 위치와 목적지 통로 위치까지의 경로를 계산할 수 있다. 이때, 층간 이동을 고려할 수 있도록 3차원 보행자 통로 네트워크를 이용할 수 있다. 또한, 경로를 계산할 때 통로의 넓이 등을 고려하여 링크 임피던스(가중치)를 설정할 수도 있다. 또, 경로를 계산할 때 링크와 노드의 속성을 이용할 수 있다. 여기서, 링크 속성의 예로는 층간 연결 링크 여부, 차량과 보행자가 같이 이용하는 통로 여부, 실내/실외 여부 등이 될 수 있다. 또한, 노드 속성의 예로는 층계, 에스컬레이터, 엘리베이터, 건물 출입구 노드 및 광역 노드(실내광장과 같이 면적이 큰 노드) 등이 될 수 있으며, 층계, 에스컬레이터 및 엘리베이터는 특수 노드로 정의할 수 있다.The route calculation map can calculate the route to the position of the pedestrian where the pedestrian is located and the route of the destination using the pedestrian passage network indicating the connection state of the link (passage) and the node (intersection). At this time, a three-dimensional pedestrian passage network can be used to consider the inter-story movement. Also, when calculating the path, the link impedance (weight value) can be set in consideration of the width of the passage and the like. You can also use attributes of links and nodes when calculating paths. Here, examples of the link attribute may include whether the link is an interlayer connection link, whether the vehicle is used by a pedestrian and a passenger, whether indoor / outdoor. Examples of node attributes may be stairs, escalators, elevators, building entrance nodes, and wide area nodes (large area nodes such as an indoor square), and stairs, escalators and elevators can be defined as special nodes.
경로안내용 지도는 실시간 경로 안내정보를 제공할 지점을 지도 데이터베이스 상에 미리 정의한다. 이때 미리 정의된 안내정보는 통로 명칭, 진행 방향, 노드 형상(삼거리, 사거리, 광장 등), 시설물(화장실, 안내센터 등), 긴급대피 통로, 상품 및 점포 등에 대한 정보가 될 수 있다.The path map is defined on the map database in advance so as to provide the real-time route guidance information. At this time, the predefined guidance information may be information on the name of the passage, the direction of travel, the shape of the node (three-way, intersection, square), facilities (toilet, information center, etc.), emergency evacuation route,
디스플레이용 지도는 상기 사용자 단말(100)의 화면에 통로 형상, 지형 및 시설물 등을 디스플레이 하며 축척에 따라 표시되는 개체가 달라질 수 있다.The display map displays the shape of the passage, the terrain, the facilities, and the like on the screen of the
예를 들어 경로 계산을 보행자 경로안내 서버(300)에서 할 경우, 상기 사용자 단말(100)에서 목적지 정보를 입력하면 그에 해당하는 지도정합용 지도, 경로안내용 지도 및 디스플레이 지도를 상기 사용자 단말(100)에 제공하며 상기 실내 항법지도 서버(310)에서 해당 경로를 계산하여 상기 사용자 단말(100)에 제공할 수 있다. 또한, 경로 계산을 사용자 단말(100)에서 할 경우, 상기 사용자 단말(100)에서 목적지 정보를 입력하면 그에 해당하는 지도정합용 지도, 경로계산용 지도, 경로안내용 지도 및 디스플레이 지도를 상기 사용자 단말(100)에 제공하며 이때 해당 경로는 상기 사용자 단말(100)에서 계산할 수 있다.For example, when the route calculation is performed by the pedestrian
상기 사용자 단말(100)은 경로 계산, 경로 안내, 지도 표시 및 수집된 정보 표시 등의 기능을 제공하는 어플리케이션(앱)을 포함하여 구성될 수 있다.The
보다 상세하게, 메뉴 및 목적지 설정, 상품 및 점포 정보 검색, 실내 경로 계산, 실내 경로 안내, 지도 표시, 실내 항법 및 실내 지도 정합 등을 수행 할 수 있다. More specifically, menu and destination setting, product and shop information search, indoor route calculation, indoor route guidance, map display, indoor navigation and indoor map matching can be performed.
여기서, 경로 계산은 단말에서 하거나 서버에서 수행 가능하며 경로계산용 항법 지도를 이용하여 이동 경로를 계획할 수 있고, 최단시간, 최단거리, 최다 관련 상품 탐색 경로 등 원하는 경로를 설정할 수 있으며, 보행자가 경로를 벗어나면 새로운 경로를 재탐색할 수 있다. 또한, 실내 경로 안내는 계산된 경로에 따라 보행자가 이동하도록 안내할 수 있고, 교차로 전방에서 "OO m 전방에서 직진, 우회전, 좌회전" 등으로 안내할 수 있다. 또, 지도 표시는 사용자가 자기 위치를 확인할 수 있도록 실내 지도 상에 위치를 표시할 수 있고, 줌인(Zoom-in), 줌아웃(zoom-out) 기능을 수행할 수 있다. 또한, 실내 항법은 스마트폰 내장 DR 센서 및 측위용 AP를 이용하여 실내 항법 기능을 수행할 수 있고, 실내의 철골 구조물 등에 의한 지자기 센서 출력의 바이어스 오차를 자이로를 이용하여 보정할 수 있으며, 측위용 AP를 이용한 위치 측정치를 이용하여 보수계의 스케일 팩터 오차를 보정할 수 있다. 아울러, 실내 지도 정합은 항법 지도의 보행자 통로 형상, 방향, 연결성 등을 이용하여 실내항법 S/W의 오차를 보정하고 보행자가 위치한 복도의 링크번호를 인지할 수 있고, 보행자가 위치한 복도의 링크번호를 이용하여 링크단위의 상세 경로안내를 할 수 있으며, 항법지도의 보행자 통로 형상, 방향 등을 이용하여 보행자 위치를 보정할 수 있고, 항법지도의 보행자 통로 링크의 방향을 이용하여 지자기 센서와 자이로의 오차를 보정할 수 있으며, 항법 지도에 표시된 실내 철골 구조물 등의 위치를 이용하여 지자기 센서 출력의 바이어스 오차 및 사용자 위치를 보정할 수 있다.Here, the path calculation can be performed in the terminal or on the server, and the route can be planned using the navigation map for route calculation, and a desired route such as the shortest time, the shortest distance and the most related goods search route can be set. If you are out of the path, you can rediscover the new path. In addition, the indoor route guidance can guide the pedestrian to move according to the calculated route, and can guide the user to the front of the intersection as "straight ahead, right turn, left turn" In addition, the map display can display the position on the indoor map so that the user can confirm his / her own position, and can perform a zoom-in function and a zoom-out function. In addition, indoor navigation can perform an interior navigation function using a smart phone built-in DR sensor and a positioning AP, can correct a bias error of a geomagnetism sensor output by a steel frame structure in a room using a gyro, The scale factor error of the pedometer can be corrected using the position measurement using AP. In addition, the indoor map matching can correct the error of the interior navigation S / W using the shape, direction, and connectivity of the pedestrian passage of the navigation map, recognize the link number of the corridor where the pedestrian is located, , And it is possible to correct the position of the pedestrian by using the shape and direction of the pedestrian passage of the navigation map and to use the direction of the pedestrian passage link of the navigation map to detect the position of the geomagnetic sensor and the gyro And the bias error and the user position of the geomagnetism sensor output can be corrected by using the position of the indoor steel structure shown in the navigation map.
점포 안내정보 서버(320)는 인터넷 망에 연결되어 시설, 점포 및 상품의 정보를 관리한다. 점포 안내정보 서버(320)는 인터넷 망을 통하여 유선 또는 무선으로 정보를 저장 할 수 있고, 저장된 정보를 상기 사용자 단말(100)에 제공함으로 상기 사용자 단말(100)에서 사용자가 점포 및 상품정보를 검색하여 목적지를 설정할 수 있으며, 필요에 따라 계산대, 화장실 및 카트 위치 등의 부대시설을 이용하기 위한 시설물 정보를 검색하여 목적지를 설정할 수 있다. 여기서 점포 안내정보 서버(320)가 관리하는 정보는 점포, 상품 및 이용시설 등의 정적(Static)정보 뿐만 아니라 쿠폰정보, 세일정보 및 예상 대기시간 등 실시간으로 변하는 동적(Dynamic)정보도 포함 될 수 있다.The shop
도 2에 도시된 바와 같이, 보행자 경로안내 서버(300)는 상기 측위전용 액세스 포인트와 유선 또는 무선으로 연결되어 상기 측위전용 액세스 포인트의 상태를 모니터링 하는 시스템 유지관리 서버(330)를 더 포함하여 구성될 수 있다. 상기 측위전용 액세스 포인트(200)는 측위전용으로 사용되어 상기 액세스 포인트의 정확한 설치 위치 및 이상유무를 매번 인력으로 점검하려면 시간 및 비용이 많이 소모되므로 별도의 관리서버를 두어 실시간으로 이상 유무를 확인하여 관리함으로 서비스의 질을 높이고 신뢰성을 확보할 수 있다.2, the pedestrian
도 2에 도시된 바와 같이, 보행자 경로안내 서버(300)는 인터넷 망 및 상기 사용자 단말과 연결되어 검색정보, 고객의 이동 경로 및 구매 목록을 저장하고 분석하는 고객 관리 서버(340)를 더 포함하여 구성될 수 있다. 이동 경로는 상기 사용자 단말(100)의 경로를 저장함으로 가능하며, 검색정보 및 구매 목록은 고객의 소비성향을 분석하여 고객의 소비성향에 맞는 정보를 제공함으로 활발한 경제 활동을 유발 할 수 있다.2, the pedestrian
본 발명의 일 실시예에 따른 보행자 경로안내 장치에 대하여 동작 원리를 도 10 내지 도 11을 참조하여 설명하면 다음과 같다.The operation principle of the pedestrian route guidance apparatus according to an embodiment of the present invention will be described with reference to FIGS. 10 to 11. FIG.
상기 사용자 단말(100)에서 어플리케이션을 실행시킨다. 사용자는 가고자 하는 목적지, 구매하고자 하는 상품정보, 이용하고자 하는 시설정보 등을 상기 사용자 단말(100)에서 선택할 수 있다. 좀 더 세부적인 예를 들어 설명하자면, 가고자 하는 목적지를 알고 있는 경우 상기 사용자 단말(100)에 목적지를 입력할 수 있다. 또는, 구매하고자 하는 상품 정보를 상기 사용자 단말(100)에 입력하면 점포 안내정보 서버(320)에서 해당 상품이 구비된 상점의 목록을 상기 사용자 단말(100)에 보내주고 상점의 목록 중 가고자 하는 목적지를 입력할 수 있다. 또는, 이용하고자 하는 시설을 상기 사용자 단말(100)에 입력하면의 점포 안내정보 서버(320)에서 해당 시설의 목록을 보내주고 시설의 목록 중 가고자 하는 목적지를 입력할 수 있다.And the application is executed in the
이렇게 상기 사용자 단말(100)에 목적지가 입력되면 사용자 단말(100)의 최초 위치를 측위 하거나 사용자 단말(100)에 직접 입력하여 출발지를 결정할 수 있다. 여기서 위치를 측위하는 방법은 도 10에 도시된 바와 같이 상향링크 액세스 포인트를 이용하거나 도 11에 도시된 바와 같이 하향링크 액세스 포인트를 이용할 수 있다. 출발지와 와 목적지 정보를 입력받은 상기 보행자 경로안내 서버(300)에서 경로 안내에 필요한 지도를 상기 사용자 단말(100)에 제공하며, 상기 사용자 단말(100) 또는 상기 보행자 경로안내 서버(300)에서 목적지까지의 경로를 계산하고, 상기 사용자 단말(100)의 실시간 위치에 따른 상세 경로 안내 정보를 제공한다. 이때, 상기 액세스 포인트(200)를 이용하여 상기 사용자 단말(100)의 실시간 위치 측위가 가능하지 않을 경우(전파를 송신 또는 수신 할 수 없는 경우) 추측항법(DR: Dead Reckoning)에 의한 위치 측위를 할 수 있다.When the destination is input to the
추측항법은 가장 최근에 구한 정확한 위치를 기초로 외부 정보를 이용하지 않고, 자이로(gyro), 주행거리계(Encoder), 속도계 등으로만 이동체의 위치와 방향을 추정하는 방법을 말한다.Guided navigation refers to a method of estimating the position and direction of a mobile object only with a gyro, an encoder, a speedometer, etc., without using external information based on the most recently obtained accurate position.
본 발명의 일 실시예에 따른 보행자 경로안내 장치는 상기 사용자 단말(100)의 자이로 센서, 지자기 센서 및 페도메터(Pedometer) 센서 중 선택되는 적어도 어느 하나를 이용하여 오차를 보정하는 것을 특징으로 할 수 있다.The pedestrian route guidance apparatus according to an embodiment of the present invention may correct errors using at least one selected from a gyro sensor, a geomagnetism sensor, and a pedometer sensor of the
지자기 센서를 이용한 추측항법은 주변에 철근 구조가 있을 경우 자기 측정에 영향을 받아 큰 오차가 생길 수 있으며, 자이로 센서이용한 추측항법은 시간에 따라 오차가 누적되어 오차가 커질 수 있고, 페도메터를 이용한 추측항법은 잘못된 스케일 팩터 값이 사용될 수 있으며 이 경우 잘못된 걸음 거리가 계속 추측 항법의 결과에 누적되어 오차가 커질 수 있다.In case of a hypothetical navigation using a geomagnetic sensor, there may be a large error due to the influence of magnetic measurement when there is a reinforcing structure in the vicinity. In the hypothetical navigation using the gyro sensor, errors may accumulate due to accumulation over time, The speculative navigation may use an incorrect scale factor value, in which case the false step may continue to accumulate in the result of the speculative navigation, resulting in large errors.
그러므로, 지자기 센서는 철근 구조 근처에서 취약하므로 지자기 세기의 급격한 변화가 있을 경우 자이로 센서를 이용하여 보정하고, 자이로 센서는 오차가 시간에 따라 누적되므로 지자기 센서를 이용하여 누적된 오차를 보정할 수 있다. 또한, 지도정보를 이용하여 추측항법 및 센서의 값을 보정할 수 있다. 예를 들어, 항법지도 상에서 통로 형상 및 사용자 단말(100)의 이동 궤적을 이용하여 추측 항법 위치를 보정할 수 있고, 항법지도 상에서 통로 형상 및 사용자 이동 궤적을 이용하여 추측항법 방향 및 센서의 오차를 보정할 수 있으며, 항법지도 상에서 통로 형상 및 사용자 단말(100)의 이동 궤적을 이용하여 지자기 센서의 오차를 보정할 수 있다.
Therefore, since the geomagnetic sensor is vulnerable to the vicinity of the reinforcing structure, the gyro sensor is used to compensate for a sudden change in the geomagnetic field strength, and the gyro sensor can accumulate the error over time so that the accumulated error can be corrected using the geomagnetic sensor . In addition, it is possible to correct the value of the estimation navigation and the sensor using the map information. For example, it is possible to correct the estimated navigation position using the path shape on the navigation map and the movement trajectory of the
본 발명은 상기한 실시예에 한정되지 아니하며, 적용범위가 다양함은 물론이고, 청구범위에서 청구하는 본 발명의 요지를 벗어남이 없이 다양한 변형 실시가 가능한 것은 물론이다.
It will be understood by those skilled in the art that various changes in form and details may be made therein without departing from the spirit and scope of the invention as defined by the appended claims.
100: 사용자 단말
200: 측위전용 액세스 포인트
210: 하향링크 액세스 포인트
220: 상향링크 액세스 포인트
300: 보행자 경로안내 서버
310: 실내 항법지도 서버
320: 점포 안내정보 서버
330: 시스템 유지관리 서버
340: 고객 관리 서버100: user terminal
200: Access point dedicated for positioning
210: Downlink access point
220: Uplink access point
300: Pedestrian path guide server
310: Indoor navigation map server
320: Store information server
330: System Maintenance Server
340: Customer Management Server
Claims (3)
실내에 배치되며, 상기 사용자 단말(100)의 위치를 추정하기 위한 정보를 상기 사용자 단말(100)과 무선으로 통신하는 적어도 하나의 측위전용 액세스 포인트(200); 및
상기 사용자 단말(100) 및 상기 측위전용 액세스 포인트(200)와 무선으로 통신하며, 상기 사용자 단말(100) 및 상기 측위전용 액세스 포인트(200)로부터 추정된 상기 사용자 단말(100)의 위치 추정 정보를 이용하여 보행자 경로안내 서비스를 제공하는 보행자 경로안내 서버(300);
를 포함하여 구성되는 보행자 경로안내 장치.
A user terminal 100 for providing route guidance information to a user;
At least one positioning dedicated access point (200) arranged in the room for wirelessly communicating information for estimating the position of the user terminal (100) with the user terminal (100); And
And wirelessly communicating with the user terminal 100 and the positioning dedicated access point 200 and estimating position estimation information of the user terminal 100 estimated from the user terminal 100 and the positioning dedicated access point 200 A pedestrian route guidance server 300 for providing a pedestrian route guidance service using the pedestrian route guidance service;
And a pedestrian path guide device.
상기 사용자 단말(100)의 자이로 센서, 지자기 센서 및 페도메터(Pedometer) 센서 중 선택되는 적어도 어느 하나를 이용하여 오차를 보정하는 것을 특징으로 하는 보행자 경로안내 장치.
2. The pedestrian route guidance system according to claim 1,
Wherein the error is corrected using at least one of a gyro sensor, a geomagnetic sensor and a pedometer sensor of the user terminal (100).
설치 좌표정보, 특성정보, 고유식별자 및 섹터정보 중 선택되는 적어도 하나의 액세스 포인트(Access Point)정보가 포함된 위치정보를 상기 사용자 단말(100)로 송출 하는 하향링크 방식인 하향링크 액세스 포인트(210);
를 포함하여 구성되는 보행자 경로안내 장치.
The method of claim 1, wherein the positioning dedicated access point (200)
A downlink access point 210 (hereinafter, referred to as a " downlink ") access point for transmitting location information including at least one access point information selected from installed coordinate information, characteristic information, unique identifier and sector information to the user terminal 100 );
And a pedestrian path guide device.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020140004475A KR20140051188A (en) | 2014-01-14 | 2014-01-14 | Pedestrian navigation apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020140004475A KR20140051188A (en) | 2014-01-14 | 2014-01-14 | Pedestrian navigation apparatus |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020120117189A Division KR101415191B1 (en) | 2012-10-22 | 2012-10-22 | Pedestrian Navigation Apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20140051188A true KR20140051188A (en) | 2014-04-30 |
Family
ID=50655951
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020140004475A KR20140051188A (en) | 2014-01-14 | 2014-01-14 | Pedestrian navigation apparatus |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20140051188A (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150125792A (en) * | 2014-04-30 | 2015-11-10 | 현대엠엔소프트 주식회사 | Method for estimating moving direction, apparatus and server |
| WO2016001477A1 (en) * | 2014-07-04 | 2016-01-07 | Kone Corporation | Allocation of facilities on a route |
| KR20210058659A (en) * | 2019-11-14 | 2021-05-24 | 이시완 | Method for constructing pedestrian path data using mobile device and the system thereof |
-
2014
- 2014-01-14 KR KR1020140004475A patent/KR20140051188A/en not_active Application Discontinuation
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150125792A (en) * | 2014-04-30 | 2015-11-10 | 현대엠엔소프트 주식회사 | Method for estimating moving direction, apparatus and server |
| WO2016001477A1 (en) * | 2014-07-04 | 2016-01-07 | Kone Corporation | Allocation of facilities on a route |
| US10955247B2 (en) | 2014-07-04 | 2021-03-23 | Kone Corporation | Allocation of facilities on a route |
| KR20210058659A (en) * | 2019-11-14 | 2021-05-24 | 이시완 | Method for constructing pedestrian path data using mobile device and the system thereof |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101415191B1 (en) | Pedestrian Navigation Apparatus | |
| KR101478170B1 (en) | Sysem and method for position estimation using uplink access point | |
| US9313614B2 (en) | Method of and system for estimating position | |
| KR101436031B1 (en) | System and method for position estimation using downlink access point | |
| KR101680151B1 (en) | Apparatus for providing indoor location information using beacons and method thereof | |
| CN104333903A (en) | Indoor multi-object positioning system and method based on RSSI (receiver signal strength indicator) and inertia measurement | |
| CN109073731A (en) | Automatically determine the position of the signal source in the region of limited satellite covering | |
| KR20110121179A (en) | Apparatus and method for estimating relative location in terminal | |
| US7362270B2 (en) | System and method to perform network node localization training using a mobile node | |
| KR101709411B1 (en) | Method for positioning based on weighted triangulation and method for indoor positioning using the same | |
| KR20180083095A (en) | Indoor positioning method and system using RSSI in beacon | |
| US10841893B2 (en) | Position estimation system and position estimation method | |
| WO2019239983A1 (en) | Propagation environment recognition method and propagation environment recognition device | |
| KR20140051188A (en) | Pedestrian navigation apparatus | |
| US10955538B2 (en) | Positioning transmitter, receiver, and system, and method therefor | |
| KR101342215B1 (en) | Method and system for determining position based on radio frequency identification | |
| JP2012103191A (en) | Radio wave monitoring device and radio wave monitoring method | |
| JP2017032486A (en) | Mobile terminal positioning system, mobile terminal, and positioning program | |
| JP2014190721A (en) | Distance metering system | |
| US11006239B2 (en) | Electronic apparatus, system including electronic apparatus, position estimation method | |
| KR100916495B1 (en) | Urgency rescue system and method | |
| CN107800736B (en) | System and method for sending service information in mass transit hub channel | |
| JP2017116301A (en) | Positioning system | |
| Skýpalová et al. | Investigating the Impact of Confined Space Factors on Signal Propagation | |
| da Costa Soares | Vehicle Tracking in Warehouses via Bluetooth Beacon Angle-of-Arrival |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A107 | Divisional application of patent | ||
| WITN | Withdrawal due to no request for examination |