KR20130141664A - 로봇의 작업 오브젝트 셀 캘리브레이션 디바이스, 시스템, 및 방법 - Google Patents
로봇의 작업 오브젝트 셀 캘리브레이션 디바이스, 시스템, 및 방법 Download PDFInfo
- Publication number
- KR20130141664A KR20130141664A KR1020137023867A KR20137023867A KR20130141664A KR 20130141664 A KR20130141664 A KR 20130141664A KR 1020137023867 A KR1020137023867 A KR 1020137023867A KR 20137023867 A KR20137023867 A KR 20137023867A KR 20130141664 A KR20130141664 A KR 20130141664A
- Authority
- KR
- South Korea
- Prior art keywords
- robot
- calibration device
- tool
- lasers
- projection
- Prior art date
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
- B25J9/1692—Calibration of manipulator
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39033—Laser tracking of end effector, measure orientation of rotatable mirror
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Laser Beam Processing (AREA)
Abstract
로봇의 작업 오브젝트 셀 캘리브레이션 시스템은 툴 접점에서 교차하고 십자선(crosshair)으로 동작하는 한쌍의 빔-투사 레이저들을 방사하는 캘리브레이션 디바이스를 포함한다. 캘리브레이션 디바이스는 또한 네개의 평면-투사 레이저들을 방사하고, 그것들은 툴 접점에 관련하여 로봇 툴의 요, 피치, 및 롤을 조정하기 위해서 사용된다. 처음에, 캘리브레이션 디바이스는 작업 현장상의 고정물 또는 작업물위의 선택된 위치에 배치된다. 로봇의 작업 오브젝트 셀 캘리브레이션 방법은 오프라인 프로그래밍의 정확성을 증가시키고 로봇 교육 시간을 줄인다. 로봇의 작업 오브젝트 셀 캘리브레이션 시스템 및 방법은 보다 간단하고, 더 낮은 투자비를 수반하고, 종래 기술보다 더 낮은 운용비가 들고, 및 각각 로봇 툴에 대한 재캘리브레이션(recalibration)을 수행해야 할 필요 없이 작업 현장상의 상이한 로봇 툴들에 대하여 사용될 수 있다.
Description
본 발명은 산업용 로봇을 위한 캘리브레이션 디바이스, 시스템, 및 방법에 관한 것으로, 보다 상세하게는, 작업 툴(working tool) 및 작업 위치(working position)를 감지하기 위한 시각적 센서를 갖는 촬상 장치(imaging device)가 제공된 산업용 로봇을 위한 캘리브레이션 디바이스, 시스템, 및 방법에 관한 것이다.
자동차 산업에 의해 유도된 산업용 로봇들의 판매는, 이제 하수관 세정, 폭탄 감지, 및 복잡한 수술을 수행하는 것처럼 다양한 임무로 이동하고 있다. 판매된 유닛들의 수가 성장을 거듭하는 자동자, 금속, 및 전자 기기 산업에서 2010년에 120,000 유닛, 전년 숫자의 두배로 증가되었다.
로봇들을 캘리브레이션하기 위한 종전의 접근법들은 오프라인 프로그램들에 앞서서 로봇 위치에 관련하여 작업물(work piece) 위치들을 측정하는 디바이스들 또는 로봇이 제작된 후에 로봇의 부정확성들을 측정하는 디바이스들을 사용한다.
일부 종래 기술 시스템들은 하기를 포함한다;
미국 특허 출원 번호 20090157226(de Smet)은 로봇 및 그것의 주변기기를 위한 로봇-셀 캘리브레이션 시스템을 개시한다. 시스템은 로봇 또는 그것의 주변기기에 부착되어 레이저 빔을 방사하는 에미터(emitter) 및 캘리브레이션을 수행하는 지점에 로봇 또는 그것의 주변기기에 마운트(mount)되어 레이저 빔을 수신하고 에미터 및 수신기 사이의 치수(dimension)를 결정하는 계산들을 수행하기 위한 수신기를 또한 포함한다.
미국 특허 번호 6,408,252(de Smet)는 로봇 시스템을 캘리브레이션하기 위한 캘리브레이션 시스템 및 변위(displacement) 측정 디바이스를 개시한다. 시스템은 로봇 캘리브레이션 시스템과 함께 선형 변위 측정 디바이스를 포함한다. 선형 변위 측정 디바이스는 가늘고 긴(elongated) 부재, 드럼, 샤프트, 드럼 변위 메커니즘 및 드럼 회전 센서를 포함한다. 가늘고 긴 부재가 이동될 때 드럼이 회전하므로 드럼은 샤프트상의 축 방향으로(axially) 변위된다. 드럼 회전 센서는 가늘고 긴 부재가 이동한 거리에 관한 정확한 정보를 제공한다. 변위 측정 디바이스가 로봇의 디바이스의 캘리브레이션의 목적을 위한 캘리브레이션 시스템과 반복적인 방식으로 사용된다.
미국 특허 번호 6,321,137(de Smet)은 로봇 검사 시스템의 캘리브레이션을 위한 방법을 개시한다. 시스템은 생산 기준에 근거한 작업물들의 검사 동안에 로봇의 정확성을 유지하기 위해 작업물을 검사하는데 사용된다. 시스템은 로봇의 수학적 모델을 저장하기 위한 수단들, 타겟 위치를 측정하기 위한 수단들을 포함하여서 수학적 모델 및 타겟의 위치로부터의 입력에 기초하여 로봇을 캘리브레이션한다.
미국 특허 번호 6,044,308(Huissoon)은 툴 센서 수단들에 대하여 로봇 제어되는 툴의 툴 접점의 포즈(pose)를 캘리브레이션하기 위한 방법을 개시하며 로봇 제어되는 툴은 로봇의 엔드 포인트(end-point)에 부착된다. 툴 접점 센서는 툴 접점의 위치를 센싱하기 위해 기준 고정물에 대하여 미리 선택된 제2 포즈에 위치된다. 방법은 기준 고정물이 툴 센서의 FOV(Field of View)내에 있도록 툴 센서를 배치하는 단계; 및 기준 로봇 프레임에 대하여 로봇 엔드 포인트의 포즈(pose)를 계산하는 단계, 기준 고정물의 네개의 지형적으로 정의된 피쳐(feature)들의 센싱된 위치로부터 툴 센서에 대한 기준 고정물의 포즈를 계산하는 단계, 및 툴 접점 센서 수단들에 대하여 툴 접점의 감지된 위치로부터 기준 고정물에 대한 툴 접점의 위치를 계산하는 단계를 포함한다.
이들 종래 기술의 시스템들은 일반적으로 비싼 장비 및 특화된 유저들을 수반하며 시간 소모적이다.
본 발명의 로봇의 작업 오브젝트 셀 캘리브레이션 디바이스, 시스템, 및 방법의 1차 목적은 오프라인 프로그램의 정확성을 증가시키고 및 로봇 학습 시간(teaching time)을 줄이는 것이다. 또한 본 발명의 로봇의 작업 오브젝트 셀 캘리브레이션 디바이스, 시스템, 및 방법의 다른 목적은 종래 기술보다 보다 낮은 투자비 및 운용 경비로 귀결되고 개선된 정밀성으로 귀결되는 보다 단순한 캘리브레이션 방법을 제공하는 것이다.
필요로 되는 것은 각각의 툴에 대한 재캘리브레이션(recalibration)을 수행하지 않고 작업 현장의 상이한 로봇 툴들을 이용하기 위한 로봇의 작업 오브젝트 셀 캘리브레이션 디바이스, 시스템, 및 방법이다. 필요로 되는 것은 로봇 툴의 정확성 또는 주변기기 장비의 위치를 결정하기 위한 추가의 컴퓨터들 또는 소프트웨어를 요구하지 않는 로봇의 작업 오브젝트 셀 캘리브레이션 디바이스, 시스템, 및 방법이며, 이것은 존재하는 BIW(body-in-white) 절차들, 직원 컴퓨터들 및 소프트웨어 및 종사자들(trades)간에 정보를 통신하는 방법들을 사용하고 배치에 대한 재교육(retraining) 없이 또는 거의 요구하지 않는다.
본 발명의 로봇의 작업 오브젝트 셀 캘리브레이션 디바이스, 시스템, 및 방법은 이런 목적들 및 이런 요구들을 다룬다.
본 발명의 로봇의 작업 오브젝트 셀 캘리브레이션 시스템 및 방법에서 사용되는 캘리브레이션 디바이스는 처음에 로봇에 근접한 작업 현장상의 고정물 또는 작업물 위의 선택된 위치에 배치된다.
본 발명의 제1 바람직한 실시예에서, 캘리브레이션 디바이스는 중심 프레임으로부터 연장되는 E-형상 확장부분(extension)으로부터 한쌍의 빔-투사 레이저들을 방사한다. 빔-투사 레이저들은 툴 접점에서 교차하는 십자선(crosshair)으로서 역할을 한다. 캘리브레이션 디바이스는 한쌍의 대향하는 프레임 말단들을 포함하는 수평 프레임 부재, 및 한쌍의 대향하는 프레임 말단들을 포함하는 수직 프레임 부재를 포함한다. 평면-투사 레이저는 바람직하게는 각 프레임 말단에 각각 배치되고 및 투사되는 레이저 평면은 각각의 평면-투사 레이저들로부터, 개별적으로 방사된다. 평면-투사 레이저들은 작업 현장상의 툴 접점에 위치된 로봇 툴의 롤(roll), 요(yaw), 및 피치(pitch)를 조정하기 위해 사용된다.
캘리브레이션 디바이스를 이용하여 로봇을 캘리브레이션하기 위한 방법은:
첫번째, 에미터(emitter)를 고정물에 부가한다. 로봇의 캘리브레이션 제어 유닛 또는 제어 인터페이스를 갖는 랩탑 컴퓨터를 이용하여, 툴 접점이 캘리브레이션 디바이스로부터 방사된 수평 빔-투사 레이저들에 정렬된다.
수평 및 수직 평면-투사 레이저들을 이용하여, 로봇 툴을 롤, 요, 및 피치에 대하여 정렬한다. 이것이 수행된 후에, 좌표들을 표시하고, 이 위치를 로봇을 제어하기 위해서 사용되는 랩탑상의 제어 패널의 또는 로봇 제어 유닛의 제로(0) 위치로서 설정한다. 이것은 로봇이 그것의 작업 경로를 위해 사용할 지점을 설정한다. 지점이 설정된 후에, 로봇 작업 경로가 사용될 준비가 된다.
이제, 캘리브레이션을 테스트한다. 만약 로봇이 어쨌든 캘리브레이션 디바이스에 충돌하지 않고 의도된 동작들을 완성하면, 캘리브레이션은 완료된다. 만약 그렇지 않으면, 작업 경로가 적절하게 설정될 때까지 상기에서 언급한 것을 반복한다.
로봇의 작업 오브젝트 셀 캘리브레이션 시스템은 캘리브레이션 디바이스를 포함한다. 캘리브레이션 디바이스는 수평으로 배치된 중심 프레임으로부터 연장되는 E-형상 확장부분(extension)으로부터 한쌍의 빔-투사 레이저들을 방사한다. 빔-투사 레이저들은 툴 접점에서 교차하는 십자선(crosshair)으로서 역할을 한다. 캘리브레이션 디바이스는 한쌍의 대향하는 프레임 말단들을 포함하는 수평 프레임 부재, 및 한쌍의 대향하는 프레임 말단들을 포함하는 수직 프레임 부재를 포함한다. 평면-투사 레이저는 바람직하게는 각 프레임 말단에 각각 배치되고 및 투사되는 레이저 평면은 각각의 평면-투사 레이저들로부터, 개별적으로 방사된다. 평면-투사 레이저들은 툴 접점에 관련하여 로봇 툴의 롤, 요, 및 피치를 조정하기 위해 사용된다.
본 발명의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법에서의 사용을 위한 캘리브레이션 디바이스의 제2 및 제3 바람직한 실시예는 수평 프레임 말단들 또는 수직 프레임 말단들에 부착된 단지 두개의 평면-투사 레이저들을 포함한다. 만약 단지 두개의 평면-투사 레이저들이 사용되면, 조절은 상기 캘리브레이션 디바이스의 상기 쌍의 평면-투사 레이저들을 이용함으로써 로봇 툴의 롤 및 요, 롤 및 피치, 또는 요 및 피치에 한정된다.
본 발명의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법에서의 사용을 위한 캘리브레이션 디바이스의 제4 바람직한 실시예는 캘리브레이션 디바이스 중간에 부착된 단지 하나의 평면-투사 레이저를 포함한다. 레이저 헤드는 360° 회전 가능하고 로봇 툴을 x-축 상에서 먼저, 이어서 레이저 헤드가 회전된 후에 y-축 상에서 정렬되게 하는 것을 가능하게 한다.
본 발명의 로봇의 작업 오브젝트 셀 캘리브레이션 디바이스, 시스템, 및 방법의 완전한 이해를 위해서, 참조 부호가 발명의 요약에 이은 상세한 설명 및 첨부한 도면들에 제공되고 곧 바람직한 본 발명의 실시예들이 예시 방식으로 도시된다. 발명은 그것의 본질적인 특성들의 취지로부터 벗어나지 않는 많은 형태들로 구체화할 수 있고, 이것은 도면들은 단지 예시 및 설명의 목적들을 위하여 및 발명의 범위들을 정의하는 것으로 의도되지 않는다 것은 명백하게 이해된다.
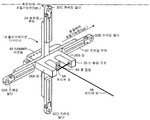
도 1은 캘리브레이션 디바이스와 툴 접점을 정렬하기 위해 사용되는 두개의 빔-투사 레이저들을 갖는, 본 발명의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스의 제1 바람직한 실시예를 도시한다.
도 2는 캘리브레이션 디바이스의 끝단(extremity)들로부터 방사된 네개의 평면-투사 레이저를 갖는 도 1의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스의 제1 바람직한 실시예를 도시한다.
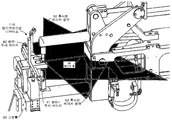
도 3은 도 1의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스의 제1 바람직한 실시예의 분해도를 도시하고, 추가로 두개의 빔-투사 레이저들로 정렬된 용접건(weld gun)의 툴 접점을 갖는 용접건을 도시한다.
도 4는 도 3의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스의 제1 바람직한 실시예의 분해도를 도시하고, 용접건 툴 헤드의 롤(roll), 요(yaw), 및 피치(pitch)를 조정하기 위해 캘리브레이션 디바이스의 끝단들로부터 방사된 두개 쌍들의 평면-투사 레이저들의 추가를 더 도시한다.
도 5는 도 1의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스의 제1 바람직한 실시예의 조립도(assembly view)를 도시하고, 툴 접점을 이용하여 두개의 빔-투사 레이저들에 정렬된 로봇 툴 헤드에 대해 고정물(fixture)상에 마운트되는 캘리브레이션 디바이스를 추가로 도시한다.
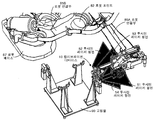
도 6은 도 5의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스의 제1 바람직한 실시예의 조립도를 도시하고, 로봇의 툴 헤드의 롤(roll), 요(yaw), 및 피치(pitch)를 조정하기 위해 사용되는 네개의 평면-투사 레이저들을 추가로 도시한다.
도 7은 도 1의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스의 제1 바람직한 실시예의 다른 분해도를 도시하고, 툴 접점 정렬 레이저들 및 롤, 요, 및 피치 정렬 레이저들에 정렬된 로봇 툴에 대해 고정물(fixture)상에 마운트되는 캘리브레이션 디바이스를 추가로 도시한다.
도 8은 본 발명의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스의 제2 바람직한 실시예의 조립도, 캘리브레이션 디바이스의 수평 축을 따라 방사되는 두개 평면-투사 레이저들, 툴 접점에서 교차하는 한쌍의 빔-투사 레이저들, 수평 평면-투사 레이저들의 이 쌍 및 툴 접점에 정렬되는 로봇 툴을 도시한다.
도 9는 본 발명의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스의 제3 바람직한 실시예의 조립도, 캘리브레이션 디바이스의 수직 축을 따라 방사되는 두개 평면-투사 레이저들, 툴 접점에서 교차하는 한쌍의 빔-투사 레이저들, 수직 평면-투사 레이저들의 이 쌍 및 툴 접점에 정렬되는 로봇 툴을 도시한다.
도 10은 본 발명의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스의 제4 바람직한 실시예, 캘리브레이션 디바이스의 수직 축을 따라 방사되는 하나의 평면-투사 레이저, 툴 접점에서 수직 평면-투사 레이저들 중 하나에 교차하는 빔-투사 레이저를 도시한다.
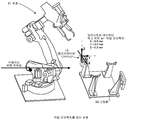
도 11a는 도 1의 캘리브레이션 디바이스가 없는 종래 기술의 실시예의 작업 현장상에서의 사용을 위한 로봇 및 고정물을 도시하고, 및 도면들 11b 및 11b 는 본 발명에서 사용된 캘리브레이션 디바이스를 갖는 유사한 로봇, 고정물을 도시하고, 간략화된 방식에서 캘리브레이션 고정물 및 로봇 사이의 경로를 캘리브레이션하고 새로운 제로(0) 위치를 획득하기 위해 어떻게 사용되는지를 보여준다.
도 2는 캘리브레이션 디바이스의 끝단(extremity)들로부터 방사된 네개의 평면-투사 레이저를 갖는 도 1의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스의 제1 바람직한 실시예를 도시한다.
도 3은 도 1의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스의 제1 바람직한 실시예의 분해도를 도시하고, 추가로 두개의 빔-투사 레이저들로 정렬된 용접건(weld gun)의 툴 접점을 갖는 용접건을 도시한다.
도 4는 도 3의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스의 제1 바람직한 실시예의 분해도를 도시하고, 용접건 툴 헤드의 롤(roll), 요(yaw), 및 피치(pitch)를 조정하기 위해 캘리브레이션 디바이스의 끝단들로부터 방사된 두개 쌍들의 평면-투사 레이저들의 추가를 더 도시한다.
도 5는 도 1의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스의 제1 바람직한 실시예의 조립도(assembly view)를 도시하고, 툴 접점을 이용하여 두개의 빔-투사 레이저들에 정렬된 로봇 툴 헤드에 대해 고정물(fixture)상에 마운트되는 캘리브레이션 디바이스를 추가로 도시한다.
도 6은 도 5의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스의 제1 바람직한 실시예의 조립도를 도시하고, 로봇의 툴 헤드의 롤(roll), 요(yaw), 및 피치(pitch)를 조정하기 위해 사용되는 네개의 평면-투사 레이저들을 추가로 도시한다.
도 7은 도 1의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스의 제1 바람직한 실시예의 다른 분해도를 도시하고, 툴 접점 정렬 레이저들 및 롤, 요, 및 피치 정렬 레이저들에 정렬된 로봇 툴에 대해 고정물(fixture)상에 마운트되는 캘리브레이션 디바이스를 추가로 도시한다.
도 8은 본 발명의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스의 제2 바람직한 실시예의 조립도, 캘리브레이션 디바이스의 수평 축을 따라 방사되는 두개 평면-투사 레이저들, 툴 접점에서 교차하는 한쌍의 빔-투사 레이저들, 수평 평면-투사 레이저들의 이 쌍 및 툴 접점에 정렬되는 로봇 툴을 도시한다.
도 9는 본 발명의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스의 제3 바람직한 실시예의 조립도, 캘리브레이션 디바이스의 수직 축을 따라 방사되는 두개 평면-투사 레이저들, 툴 접점에서 교차하는 한쌍의 빔-투사 레이저들, 수직 평면-투사 레이저들의 이 쌍 및 툴 접점에 정렬되는 로봇 툴을 도시한다.
도 10은 본 발명의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스의 제4 바람직한 실시예, 캘리브레이션 디바이스의 수직 축을 따라 방사되는 하나의 평면-투사 레이저, 툴 접점에서 수직 평면-투사 레이저들 중 하나에 교차하는 빔-투사 레이저를 도시한다.
도 11a는 도 1의 캘리브레이션 디바이스가 없는 종래 기술의 실시예의 작업 현장상에서의 사용을 위한 로봇 및 고정물을 도시하고, 및 도면들 11b 및 11b 는 본 발명에서 사용된 캘리브레이션 디바이스를 갖는 유사한 로봇, 고정물을 도시하고, 간략화된 방식에서 캘리브레이션 고정물 및 로봇 사이의 경로를 캘리브레이션하고 새로운 제로(0) 위치를 획득하기 위해 어떻게 사용되는지를 보여준다.
이제 도면들과 관련하여, 도면 1 및 2는 본 발명의 로봇의 작업 오브젝트 캘리브레이션 시스템 및 방법의 캘리브레이션 디바이스(10)의 제1 바람직한 실시예를 개시한다. 캘리브레이션 디바이스(10)는 툴 접점(공간상에서의 지점)(60)에 기초하여 로봇 툴의 작업 경로를 캘리브레이션하기 위해 사용된다. 공간상의 알려진 지점(60)은 세개의 차원들(X, Y, 및 Z)로 그리고 그것들의 회전 축들 Rx(피치), Ry(요), 및 Rz(롤)에 관련하여 정의된다.
캘리브레이션 디바이스(10)는 한쌍의 대향하는 프레임 말단(end)들(32A 및 32B)을 포함하는 수평 프레임 부재(22) 및 한쌍의 대향하는 프레임 말단들(32C 및 32D)을 포함하는 수직 프레임 부재(24)를 포함한다. 평면-투사 레이저(41, 42, 43, 및 44)는 바람직하게는 각 프레임 말단(32A, 32B, 32C, 및 32D)에 각각 배치되고 그리고 투사되는 레이저 평면(51, 52, 53, 및 54)이 평면-투사 레이저들(41, 42, 43, 및 44)의 각각으로부터 개별적으로 방사된다.
수평 프레임 부재(22)를 따라 연장되는 것은 수평 프레임 부재(22) 및 수직 프레임 부재(24)에 관련하여 일반적으로 중심에 배치되고 수평으로 정렬되는 사각화된 "E-형상" 구조(25)를 형성하기 위해 결합하는 병렬의 세개의 암(arm)들이 있다. E-형상 구조(25)의 중앙 암(넘버링 되지 않은)은 두개의 말단 암들(26A 및 26B)보다 짧다.
제1 빔-투사 레이저(58)는 캘리브레이션 디바이스(10)의 중앙 근접점(proximate)에 배치된 "E-형상" 구조(25)의 단축된 중앙 암으로부터 방사된다. 제2 의 빔-투사 레이저(56)는 E-형상 구조(25)의 암들 중 하나(26A)로부터 방사되고 대향하는 암(26B)으로 향한다.
제1 빔-투사 레이저(58)는 세개의 차원들로 정의된 X, Y, 및 Z 좌표들에 관련하여 공간상의 알려진 지점(60)에서 제2 빔-투사 레이저(56)와 기본적으로 수직이고 동일 평면상에 있고 교차한다.
도 2에 도시된 바람직한 실시예에서, "E-형상" 구조(25)는 수평 프레임 부재 (22) 및 수직 프레임 부재(24)의 중심에 위치되기 때문에, 레이저 빔(58)은 프레임 말단들(32A 및 32B)에서 방사되는 평면-투사 레이저들(41 및 42)로부터 방사된 두개의 투사되는 레이저 평면들(51 및 52)과 본질적으로 동일평면에 있다. 유사하게, 빔-투사 레이저(58)는 프레임 말단들(32C 및 32D)에서 방사되는 평면-투사 레이저들(43 및 44)로부터 방사된 두개의 투사되는 레이저 평면들(53 및 54)과 본질적으로 동일평면에 있다. 캘리브레이션 디바이스(10)는 고정물(90) 상에 마운트되고 로봇의 작업 경로가 공간상의 알려진 지점(60)에 관련하여 캘리브레이션되는 것을 가능하게 한다.
평면-투사 레이저들(41, 42, 43, 및 44)은 캘리브레이션 디바이스(10)의 프레임 말단들(32A, 32B, 32C, 및 32D, 각각)로부터 네개의 투사되는 레이저 평면들 (51, 52, 53, 및 54, 각각)을 투사한다. 평면-투사 레이저들(41, 42, 43, 및 44)은 포커스된(focused) 라인들(3.5v-4.5v 16mm 5mw)을 갖는 레드(red) 레이저 모듈들이다.
빔-투사 레이저들(56 및 58)은 캘리브레이션 디바이스(10)의 암(26A)으로부터 방사된 두개의 레이저 빔들을 투사하여 초점을 맞출 수 있는 지점들이다. 빔-투사 레이저들(56 및 58)은 초점을 맞출 수 있는 도트(dot)들(3.5v-4.5v 16mm 5mw)을 갖는 레드 레이저 모듈들이다.
도 3은 용접건과의 사용을 위한 캘리브레이션 디바이스(10)의 분해도를 도시한다. 용접건의 툴 접점(60)은 두개의 빔-투사 정렬 레이저들(56 및 58)과 정렬된다. 도 4는 로봇 툴 헤드(80)의 롤, 요, 및 피치를 조정하기 위해 평면-투사 레이저들(41, 42, 43, 및 44, 각각)로부터의 네개의 투사되는 레이저 평면들(51, 52, 53, 및 54, 각각)의 추가를 더 도시한다.
도 5는 고정물(90)상에 마운트되는 캘리브레이션 디바이스(10)를 도시한다. 로봇 툴 헤드(80)는 툴 접점(60)을 이용하여 두개의 빔-투사 레이저들(56 및 58)에 정렬된다. 도 6은 작업물(10)의 평면-투사 레이저들(41, 42, 43, 및 44, 각각)로부터의 네개의 투사되는 레이저 평면들(51, 52, 53, 및 54, 각각)을 더 도시하고, 그것들은 로봇 툴 헤드(80)의 롤, 요, 및 피치를 조정하기 위해 사용된다.
도 7은 X, Y, 및 Z 좌표들을 설정하는 툴 접점(60) 정렬 레이저 빔들(56 및 58)에 정렬된 로봇 툴(80)과 고정물(90)상에 마운트된 캘리브레이션 디바이스(10)를 도시한다.
도 8은 본 발명의 로봇의 작업 오브젝트 캘리브레이션 방법에서의 사용을 위한 캘리브레이션 디바이스(110)의 제2의 바람직한 실시예를 도시한다. 이 실시예에서, 두개의 투사되는 레이저 평면들(51 및 52)이 캘리브레이션 디바이스(110)의 프레임 부재(32)의 수평 축을 따라 두개의 평면-투사 레이저들(41 및 42, 각각)로부터 방사된다. 로봇 툴(80)은 투사되는 레이저 평면들(51 및 52)의 이 쌍 및 툴 접점(60)에 정렬된다.
도 9는 본 발명의 로봇의 작업 오브젝트 캘리브레이션 방법에서의 사용을 위한 캘리브레이션 디바이스(210)의 제3 바람직한 실시예를 도시한다. 이 실시예에서, 두개의 투사되는 레이저 평면들(53 및 54)이 캘리브레이션 디바이스(210)의 프레임 부재(24)의 수직 축을 따라 두개의 평면-투사 레이저들(43 및 44, 각각)로부터 방사된다. 로봇 툴(80)은 투사되는 레이저 평면들(53 및 54)의 이 쌍 및 툴 접점(60)에 정렬된다.
도 10은 본 발명의 로봇의 작업 오브젝트 캘리브레이션 방법에서의 사용을 위한 캘리브레이션 디바이스(310)의 또 다른 바람직한 실시예를 도시한다. 이 실시예에서는, 하나의 평면 투사되는 레이저(51)가 캘리브레이션 디바이스(310)의 수직 축을 따라 평면-투사 레이저(43)로부터 방사된다. 빔-투사 레이저(56)는 툴 접점(60)에서 수직 평면-투사 레이저(53)와 교차한다. 평면-투사 레이저(51)는 360° 회전 가능한 회전하는 헤드(head)를 가져서, 로봇 툴이 x-축 상에서 먼저, 이어서 레이저 헤드가 회전된 후에 y-축 상에서 정렬되는 것을 가능하게 한다.
도 11a는 본 발명의 캘리브레이션 디바이스 없는 종래 기술의 실시예의 작업현장에서의 사용을 위한 로봇(81) 및 고정물(90)을 도시한다. 도면 11b 및 11c 는 캘리브레이션 디바이스(10)를 갖는 유사한 로봇(81), 및 고정물(90)을 도시하고, 고정물(90) 및 로봇(81) 사이의 경로를 캘리브레이션하고 그리고 새로운 제로(0) 위치를 획득하기 위해서 어떤 간략화된 방식으로 캘리브레이션 디바이스(10)가 사용되는지를 도시한다.
CAD 시뮬레이션 소프트웨어 사용하여, CAD 유저는 툴에 대한 위치를 다른 기계 설비(tooling)와 충돌을 피하기 위해 및 로봇(81) 또는 기계 설비 암 말단(end-of-arm)에 대한 액세스를 용이하게 하기 위해 가장 적합한 장소로 선택한다. 오프라인 프로그램들이 그런 다음 캘리브레이션 디바이스(10)에 대하여 다운로드 된다. 캘리브레이션 디바이스(10)는 그런 다음 작업 현장에서의 CAD 유저에 의해 정의된 위치내 툴 또는 작업물 위에 배치된다. 로봇 기술자(technician)는 이어서 로봇 툴 (80) 툴의 접점(60)을 디바이스 내로 조작하고 CAD계(world) 및 작업현장 사이의 편차를 획득하기 위해서 그것을 빔-투사 레이저들(56 및 58)에 정렬한다. 이 편차는 이어서 로봇(81) 내로 입력되고 및 새로운 캘리브레이션 디바이스(10)를 정의하는데 사용된다. 이것이 오프라인 프로그램들을 캘리브레이션하고 및 툴, 고정물, 및 주변기기의 거리 및 방위(orientation)를 정의한다.
고정물(90) 위의 캘리브레이션 디바이스(10)와 오프라인 프로그래밍은 캘리브레이션 디바이스(10)가 로봇(81)에 관련하여 고정물(90)의 "실제(real world) 위치"로 수정되는 것을 가능하게 한다. 만약 고정물(90)이 여하튼 움직여야 할 필요가 있거나 또는 뜻하지 않게 부딪히면, 조절하기 하기 위해서 캘리브레이션 디바이스(10) 및 전체 경로 이동(shift)들을 간단하게 수정한다.
본 발명의 로봇 작업 셀 캘리브레이션들 방법은 한정되는 것은 아니지만, ROBCAD, Process Simulate, DELMIA, Roboguide 및 RobotStudio CAD 소프트웨어를 포함하는 로봇의 시뮬레이션 패키지들과 호환 가능하다.
빔-투사 레이저들(56 및 58) 및 투사되는 레이저 평면들(51, 52, 53, 및 54)은 로봇 툴(80)의 알려진 피쳐(feature)들로 투사되고, 및 이어서 로봇 툴(80)의 경로를 캘리브레이션하기 위해 이용되고 로봇 툴(80)에 관련하여 고정물(90)의 관계(relationship)를 측정한다.
CAD 유저는 처음에 다른 기계설비와 사고들을 피하고 로봇 또는 기계설비 암의 말단(end-of-arm)을 위한 액세스의 용이를 위해서 툴 또는 작업물 위에 가장 적합한 위치를 선택한다. 캘리브레이션 디바이스(10)는 바람직하게는 표준 NAMM의 홀 패턴 마운트(40)를 이용하여 고정물(90)상에 마운트한다. 마운트들은 마운트 파트(part)들에 대하여 홀 사이즈들의 정확한 일치를 보장하기 위해서 레이저 절단(laser cut)된다.
본 발명의 캘리브레이션 디바이스(10)는 공간에서의 제로(0) 지점, 제로(0) 기준 프레임, 및 제로(0) 이론적인 프레임을 갖고, 이것이 고정물(90)위에 배치된다.
캘리브레이션 디바이스(10)는 고정물(90) 위에 배치되고, 고정물(90)에 대한 로봇 툴(80)의 "실제(real-world)" 관계 획득하고 동시에 이 "실제" 위치로 캘리브레이션 디바이스(10)를 업데이트 함으로써 용접건의 툴 접점을 캘리브레이션 디바이스(10) 내의 특정 방위에 맞추어지는 것을 시각적으로 가능하게 한다.
본 발명의 로봇의 작업 오브젝트 셀 캘리브레이션 시스템은 로봇 툴(80)의 경로를 캘리브레이션하기 위해서 캘리브레이션 디바이스(10)의 위치가 로봇 툴 (80)의 위치와 상관되고 동시에 로봇 툴(80)에 관련하여 고정물(90)의 "실제(real-world)" 거리 및 방위를 획득하는 것을 필요로 한다.
로봇의 작업 오브젝트 셀 캘리브레이션 방법은 캘리브레이션 디바이스(10)와 로봇 툴(80)을 배치하고 편차(difference)를 결정한다.
본 발명의 로봇의 작업 오브젝트 셀 캘리브레이션 방법은 "알려진" 캘리브레이션 디바이스 또는 프레임(로봇의 시뮬레이션 CAD 소프트웨어 제공된 캘리브레이션 디바이스)을 캘리브레이션하기 위해 사용된다. 본 발명의 로봇의 작업 오브젝트 셀 캘리브레이션 방법은 알려진 X, Y, 및 Z 위치로 레이저 빔들을 투사함으로써 및 툴 접점(60)에 관련하여 로봇 툴(80)의 롤, 요, 및 피치를 조정하는데 알려진 기하학적 평면들을 정의함으로써 동작한다.
레이저가 로봇 암 기계설비의 로봇의 말단으로(용접건들, 물질 핸들러들, 미그(mig) 토오치들, 등) 투사되고 유저는 "알려진" 오프라인 프로그램 (캘리브레이션 디바이스에 제공된 시뮬레이션) 및 실제(작업 현장(작업 현장)) 캘리브레이션 디바이스 사이의 위치상의 편차를 획득하기 위해서 기계설비 암의 말단(end-of-arm)을 가진 로봇을 이들 레이저들 내로 조작할 것이다. 그 반대도 또한 적용된다 - 예를 들어; 물질 핸들러 로봇은 알려진 피쳐들을 갖는 알려진 작업물로 캘리브레이션 디바이스(10)를 운반할 수 있다.
캘리브레이션 디바이스(10)의 CAD 모델은 로봇의 시뮬레이션 CAD 계에 놓여진다. CAD 유저는 다른 기계설비와 사고들을 피하고 로봇 또는 기계설비 암의 말단(end-of-arm)을 위한 액세스의 용이를 위해서 툴 또는 작업물 위에 가장 적합한 위치를 선택한다.
오프라인 프로그램들은 그런 다음 이 캘리브레이션 디바이스(10)에 대하여 다운로드된다. 캘리브레이션 디바이스(10)는 작업 현장에서의 CAD 유저에 의해 정의된 위치 내 툴 또는 작업물 위에 배치된다. 로봇 기술자는 그런 다음 그것을 레이저 빔들에 정렬하여 CAD 계 및 작업 현장(작업 현장) 사이의 편차를 획득하기 위해서 디바이스 내로 툴 접점(60)을 조작한다. 이 편차는 이어서 로봇에 입력되고 및 새로운 캘리브레이션 디바이스를 정의하는데 사용되어서 오프라인 프로그램들을 캘리브레이션하고 툴, 고정물, 주변기기, 및 다른 주요 컴포넌트들의 거리 및 방위를 정의한다.
본 발명의 로봇의 작업 오브젝트 셀 캘리브레이션 방법은 로봇(81)에 대한 경로들 캘리브레이션하면서 동시에 로봇의 주변기기들의 캘리브레이션을 수반한다.
본 발명의 로봇의 작업 오브젝트 셀 캘리브레이션 시스템 및 방법에서 배치된 시스템을 생성하는 레이저 평면은 관련 기술 분야에서 잘 알려져 있다. 예를 들어 "Laser Plane Generator Having Self-Calibrating Leveling System" 명칭의 미국 특허 5,689,330 (Gerard, et al.); 및 "Laser System for Generating a Reference Plane" 명칭의 미국 특허 6,314,650 (Falb)를 참조한다.
본 발명의 로봇의 작업 오브젝트 셀 캘리브레이션 시스템 및 방법은 통합자들이 그것들의 시뮬레이션 CAD 파일들을 "실제(real world)" 위치들로 업데이트하는 능력을 허용하는 로봇 시뮬레이션 소프트웨어와 함께 미래 사용을 위한 카이팅(kiting) 또는 리버스 엔지니어링(reverse engineering)에 도움을 준다.
기술은 존재하는 BIW(body-in-white) 절차들, 직원 컴퓨터들 및 소프트웨어 및 종사자들간에 정보를 통신하는 방법들을 사용한다.
이 출원 전체에서, 다양한 특허들 및 출원들이 번호 및 발명자에 의해 언급된다. 이들 문서들의 개시들은 이에 의하여 이 발명이 적용되는 최첨단 기술을 보다 완벽하게 설명하기 위해서 그것들 전체가 이 명세서에 참고로 인용된다.
본 발명의 로봇의 작업 오브젝트 셀 캘리브레이션 디바이스, 시스템, 및 방법의 많은 대안들, 변형예들, 및 본 출원의 발명의 면에서의 당해 기술분야의 통상의 기술자들에 자명할 것이란 것은 명백하다. 본 발명의 경계 및 범위는 상기 명세서의 용어에 의하기 보다는 첨부된 청구항들에 의해 결정되는 것으로 의도되고, 및 결합하여 협업하는 등가물을 형성하는 모든 이런 대안들, 변형예들, 및 변화들은 이들 청구항들의 취지 및 범위 내에 포함되는 것으로 의도된다.
10. 캘리브레이션 디바이스 (1번째 바람직한 실시예)
22. 수평 프레임 부재
24. 수직 프레임 부재
25. E-형상 구조
26A 및 26B. 암
32A. 왼쪽 프레임 말단 (수평)
32B. 오른쪽 프레임 말단 (수평)
32C. 상단 프레임 말단 (수직)
32D. 하단 프레임 말단 (수직)
40. NAMM의 마운팅
41. 수평 프레임의 왼쪽 측면으로부터의 평면-방사 레이저
42. 수평 프레임 오른쪽 측면으로부터의 평면-방사 레이저
43. 상단 수직 프레임으로부터의 평면-방사 레이저
44. 하단 수직 프레임으로부터의 평면-방사 레이저
51. 평면-방사 레이저 (41)로부터 투사되는 레이저 평면
52. 평면-방사 레이저 (42) 로부터 투사되는 레이저 평면
53. 평면-방사 레이저 (43)로부터 투사되는 레이저 평면
54. 평면-방사 레이저 (44)로부터 투사되는 레이저 평면
56. 암 (26A)으로부터의 레이저 빔
58. "E"의 중앙으로부터의 레이저 빔
60. 툴 접점(tool contact point)
80. 로봇 툴
81. 로봇
82. 로봇 조인트(joint)
85A., 85B. 로봇 연결부 (linkage)들
87. 로봇 베이스
90. 고정물
110. 2번째 캘리브레이션 디바이스
210. 3번째 캘리브레이션 디바이스
310. 4번째 캘리브레이션 디바이스
22. 수평 프레임 부재
24. 수직 프레임 부재
25. E-형상 구조
26A 및 26B. 암
32A. 왼쪽 프레임 말단 (수평)
32B. 오른쪽 프레임 말단 (수평)
32C. 상단 프레임 말단 (수직)
32D. 하단 프레임 말단 (수직)
40. NAMM의 마운팅
41. 수평 프레임의 왼쪽 측면으로부터의 평면-방사 레이저
42. 수평 프레임 오른쪽 측면으로부터의 평면-방사 레이저
43. 상단 수직 프레임으로부터의 평면-방사 레이저
44. 하단 수직 프레임으로부터의 평면-방사 레이저
51. 평면-방사 레이저 (41)로부터 투사되는 레이저 평면
52. 평면-방사 레이저 (42) 로부터 투사되는 레이저 평면
53. 평면-방사 레이저 (43)로부터 투사되는 레이저 평면
54. 평면-방사 레이저 (44)로부터 투사되는 레이저 평면
56. 암 (26A)으로부터의 레이저 빔
58. "E"의 중앙으로부터의 레이저 빔
60. 툴 접점(tool contact point)
80. 로봇 툴
81. 로봇
82. 로봇 조인트(joint)
85A., 85B. 로봇 연결부 (linkage)들
87. 로봇 베이스
90. 고정물
110. 2번째 캘리브레이션 디바이스
210. 3번째 캘리브레이션 디바이스
310. 4번째 캘리브레이션 디바이스
Claims (10)
- 로봇 툴(robot tool)의 작업 경로를 캘리브레이션하기 위한 디바이스에 있어서, 상기 캘리브레이션 디바이스는 프레임을 가지며, 상기 프레임은, 사용중에, 제1 및 제2 빔-투사 레이저들을 방사하고, 상기 제1 빔-투사 레이저는 공간상의 알려진 지점에서 상기 제2 의 빔-투사 레이저와 교차하며, 상기 프레임은, 사용중에, 적어도 두개의 평면-투사 레이저들을 방사하는, 상기 프레임;
상기 프레임은 고정물(fixture)위에 마운트할 수 있고 상기 로봇의 작업 경로를 상기 공간상의 알려진 지점에 관련하여 캘리브레이션되는 것을 가능하게 하며; 및
상기 적어도 두개의 평면-투사 레이저들은 상기 공간상의 알려진 지점에 관련하여 상기 로봇 툴의 각의 위치(angular position)들을 조절하는 것이 가능한, 캘리브레이션 디바이스. - 로봇 툴(robot tool)의 작업 경로를 캘리브레이션하기 위한 디바이스에 있어서, 상기 캘리브레이션 디바이스는 프레임을 가지며, 상기 프레임은, 사용중에, 제1 및 제2 빔-투사 레이저들을 방사하고, 상기 제1 빔-투사 레이저는 공간상의 알려진 지점에서 상기 제2 의 빔-투사 레이저와 교차하며, 상기 프레임은, 사용중에, 적어도 네개의 평면-투사 레이저들을 방사하는, 상기 프레임;
상기 프레임은 고정물(fixture)위에 마운트할 수 있고 상기 로봇 작업 경로를 상기 공간상의 알려진 지점에 관련하여 캘리브레이션되도록 하는 것을 가능하게 하며; 및
상기 적어도 네개의 평면-투사 레이저들은 상기 공간상의 알려진 지점에 관련하여 상기 로봇 툴의 요(yaw), 피치(pitch) 및 롤(roll)을 조절하는 것이 가능한, 캘리브레이션 디바이스. - 로봇 작업 경로를 캘리브레이션하기 위한 시스템에 있어서,
고정물(fixture) 위에 마운트할 수 있는 캘리브레이션 디바이스로서, 상기 캘리브레이션 디바이스는 프레임을 가지며, 상기 프레임은, 사용중에, 제1 및 제2 빔-투사 레이저들을 방사하고, 상기 제1 빔-투사 레이저는 공간상의 알려진 지점에서 상기 제2 의 빔-투사 레이저와 교차하며, 상기 프레임은, 사용중에, 적어도 두개의 평면-투사 레이저들을 방사하고, 상기 캘리브레이션 디바이스는 상기 로봇 작업 경로를 상기 공간상의 알려진 지점에 관련하여 캘리브레이션될 수 있게 하는, 상기 캘리브레이션 디바이스; 및
상기 공간상의 알려진 지점에서 상기 디바이스와 정렬 가능한 로봇 툴로서, 상기 캘리브레이션 디바이스는 고정물(fixture)위에 마운트 할 수 있고, 상기 적어도 두개의 평면-투사 레이저들이 적어도 두개의 평면들에 관한 상기 공간상의 알려진 지점에 관련하여 상기 로봇 툴의 각 위치(angular position)들을 조절하는 것을 가능하게 하고, 상기 두개의 평면들이 롤(roll), 요(yaw), 및 피치(pitch)로부터 선택될 때 로봇 작업 경로가 상기 로봇 툴에 대하여 캘리브레이션되는, 상기 로봇 툴;을 포함하는, 로봇 작업 경로를 캘리브레이션하기 위한 시스템. - 로봇 작업 경로를 캘리브레이션하기 위한 시스템에 있어서,
고정물(fixture) 위에 마운트할 수 있는 캘리브레이션 디바이스로서, 상기 캘리브레이션 디바이스는 프레임을 가지며, 상기 프레임은, 사용중에, 제1 및 제2 빔-투사 레이저들을 방사하고, 상기 제1 빔-투사 레이저는 공간상의 알려진 지점에서 상기 제2 의 빔-투사 레이저와 교차하며, 상기 프레임은, 사용중에, 적어도 네개의 평면-투사 레이저들을 방사하고, 상기 캘리브레이션 디바이스는 상기 로봇 작업 경로를 상기 공간상의 알려진 지점에 관련하여 캘리브레이션될 수 있게 하는, 상기 캘리브레이션 디바이스; 및
상기 공간상의 알려진 지점에서 상기 디바이스와 정렬 가능한 로봇 툴로서, 상기 캘리브레이션 디바이스는 고정물(fixture)위에 마운트 할 수 있고, 상기 적어도 네개의 평면-투사 레이저들이 상기 공간상의 알려진 지점에 관련하여 상기 로봇 툴의 롤(roll), 요(yaw), 및 피치(pitch)을 조절하는 것을 가능하게 할 때, 로봇 작업 경로가 상기 로봇 툴에 대하여 캘리브레이션되는, 상기 로봇 툴;을 포함하는, 로봇 작업 경로를 캘리브레이션하기 위한 시스템. - 로봇 작업 경로를 캘리브레이션하기 위한 시스템에 있어서,
고정물위에 마운트 할 수 있는 캘리브레이션 디바이스로서, 상기 캘리브레이션 디바이스는 프레임을 가지며, 상기 프레임은, 사용중에, 적어도 제1 평면-투사 레이저를 방사하고, 상기 프레임은 거기로부터 연장되는 암(arm)을 포함하고, 빔-투사 레이저는 상기 암(arm)으로부터 방사되고, 상기 빔-투사 레이저는 공간상의 알려진 지점에서 상기 평면-투사 레이저에 교차하는, 상기 캘리브레이션 디바이스;
상기 공간상의 알려진 지점에서 상기 디바이스와 정렬 가능한 로봇 툴로서, 상기 디바이스가 고정물(fixture)위에 마운트 가능할 때, 로봇 작업 경로가 상기 로봇 툴에 대하여 캘리브레이션되는, 상기 로봇 툴;을 포함하는, 로봇 작업 경로를 캘리브레이션하기 위한 시스템. - 캘리브레이션 디바이스를 배치하여 작업 현장(shop floor) 상의 로봇을 캘리브레이션하기 위한 방법에 있어서, 주변기기들을 갖는 상기 로봇은 고정물 및 로봇 툴을 포함하고, 상기 캘리브레이션 디바이스는 네개의 평면-투사 레이저들 및 두개의 빔-투사 레이저들을 방사하고, 상기 빔-투사 레이저들은 툴 접점(tool contact point)에서 교차하는, 상기 캘리브레이션 방법은,
a. 상기 고정물 또는 작업물 위의 선택된 위치에 관련하여 상기 캘리브레이션 디바이스를 배치하는 단계, 상기 고정물 또는 작업물은 작업 현장상에 위치되는, 상기 배치하는 단계;
b. 상기 빔 및 평면-투사 레이저들에 대한 상기 툴 접점을 상기 작업 현장상에 위치시키는 단계;
c. 상기 로봇 툴을 상기 작업 현장 상에서의 상기 빔 및 평면-투사 레이저들에 관련하여 상기 툴 접점과 정렬상태로 조작하는 단계; 및
d. 상기 복수개의 평면-투사 레이저들을 이용하여 상기 로봇 툴의 롤 및 요, 롤 및 피치, 요 및 피치, 또는 롤, 요 및 피치를 조정하는 단계;를 포함하는, 캘리브레이션 방법. - 캘리브레이션 디바이스를 배치하여 작업 현장(shop floor) 상의 로봇을 캘리브레이션하기 위한 방법에 있어서, 주변기기들을 갖는 상기 로봇은 고정물 및 로봇 툴을 포함하고, 상기 디바이스는 복수개의 평면-투사 레이저들 및 적어도 두개의 빔-투사 레이저들을 방사하고, 상기 디바이스 레이저들은 툴 접점(tool contact point)에서 교차하는, 상기 캘리브레이션 방법은,
a. 상기 고정물 또는 작업물 위의 선택된 위치에 관련하여 상기 캘리브레이션 디바이스를 배치하는 단계로서, 상기 고정물 또는 작업물은 작업 현장상에 위치되는, 상기 배치하는 단계;
b. 상기 툴 접점을 상기 작업 현장상의 상기 디바이스에 관련하여 위치시키는 단계;
c. 상기 로봇 툴을 상기 작업 현장 상에서의 상기 빔 및 평면-투사 레이저들에 대한 상기 툴 접점과 정렬상태로 조작하는 단계; 및
d. 상기 복수개의 평면-투사 레이저들을 이용하여 상기 로봇 툴의 롤 및 요, 롤 및 피치 또는 요 및 피치를 조정하는 단계;를 포함하는, 캘리브레이션 방법. - 로봇 툴(robot tool)의 작업 경로를 캘리브레이션하기 위한 디바이스에 있어서, 상기 캘리브레이션 디바이스는 프레임을 가지며, 상기 프레임은, 사용중에, 제1 및 제2 레이저를 방사하고, 상기 제1 레이저는 공간상의 알려진 지점에서 상기 제2 레이저와 교차하며;
상기 프레임은 고정물(fixture)위에 마운트할 수 있고 상기 로봇의 작업 경로를 상기 공간상의 알려진 지점에 관련하여 캘리브레이션되는 것을 가능하게 하며; 및
상기 적어도 제1 및 제2 레이저는 상기 공간상의 알려진 지점에 관련하여 상기 로봇 툴의 각의 위치(angular position)들을 조절하는 것이 가능한, 캘리브레이션 디바이스. - 로봇 작업 경로를 캘리브레이션하기 위한 시스템에 있어서,
고정물(fixture) 위에 마운트할 수 있는 캘리브레이션 디바이스로서, 상기 캘리브레이션 디바이스는 프레임을 가지며, 상기 프레임은, 사용중에, 제1 및 제2 레이저를 방사하고, 상기 제1 레이저는 공간상의 알려진 지점에서 상기 제2 레이저와 교차하며; 및
상기 공간상의 알려진 지점에서 상기 디바이스와 정렬 가능한 로봇 툴로서, 로봇의 작업 경로는 상기 캘리브레이션 디바이스를 고정물(fixture)위에 마운트 할 때, 상기 로봇 툴에 대하여 캘리브레이션하기 위한 시스템. - 캘리브레이션 디바이스를 배치하여 작업 현장(shop floor) 상의 로봇을 캘리브레이션하기 위한 방법에 있어서, 주변기기들을 갖는 상기 로봇은 고정물 및 로봇 툴을 포함하고, 상기 캘리브레이션 디바이스는 제1 및 제2 레이저를 방사하고, 상기 제1 레이저는 공간상의 알려진 지점에서 상기 제2 레이저와 교차하며; 상기 캘리브레이션 방법은,
a. 상기 고정물 또는 작업물 위의 선택된 위치에 관련하여 상기 캘리브레이션 디바이스를 배치하는 단계, 상기 고정물 또는 작업물은 작업 현장상에 위치되는, 상기 배치하는 단계;
b. 상기 공간상의 알려진 지점은 상기 작업 현장상에 상기 캘리브레이션 장치에 관련하여 위치시키는 단계;
c. 상기 로봇 툴을 상기 작업 현장 상에서 상기 레이저들에 관련하여 상기 공간상의 알려진 지점에 정렬 상태로 조작하는 단계; 및
d. 상기 공간상의 알려진 지점을 이용하여 상기 로봇 툴의 롤과 요, 롤과 피치 또는 요와 피치를 조정하는 단계;를 포함하는, 캘리브레이션 방법.
Applications Claiming Priority (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161465080P | 2011-03-14 | 2011-03-14 | |
| US61/465,080 | 2011-03-14 | ||
| US201161518912P | 2011-05-13 | 2011-05-13 | |
| US61/518,912 | 2011-05-13 | ||
| US13/385,091 US9266241B2 (en) | 2011-03-14 | 2012-02-01 | Robotic work object cell calibration system |
| US13/385,091 | 2012-02-01 | ||
| US13/385,797 US9061421B2 (en) | 2011-03-14 | 2012-03-07 | Robotic work object cell calibration method |
| US13/385,797 | 2012-03-07 | ||
| PCT/US2012/000140 WO2012125209A2 (en) | 2011-03-14 | 2012-03-14 | Robotic work object cell calibration device, system, and method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20130141664A true KR20130141664A (ko) | 2013-12-26 |
Family
ID=47007022
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020137023867A KR20130141664A (ko) | 2011-03-14 | 2012-03-14 | 로봇의 작업 오브젝트 셀 캘리브레이션 디바이스, 시스템, 및 방법 |
Country Status (10)
| Country | Link |
|---|---|
| US (2) | US9266241B2 (ko) |
| EP (1) | EP2686143A2 (ko) |
| JP (1) | JP2014508050A (ko) |
| KR (1) | KR20130141664A (ko) |
| CN (1) | CN103442858A (ko) |
| AU (1) | AU2012229542A1 (ko) |
| BR (1) | BR112013023413A2 (ko) |
| CA (1) | CA2828856A1 (ko) |
| MX (1) | MX2013010355A (ko) |
| WO (1) | WO2012125209A2 (ko) |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9266241B2 (en) * | 2011-03-14 | 2016-02-23 | Matthew E. Trompeter | Robotic work object cell calibration system |
| US9713869B2 (en) * | 2012-03-07 | 2017-07-25 | Matthew E. Trompeter | Calibration of robot work paths |
| US8485017B1 (en) * | 2012-08-01 | 2013-07-16 | Matthew E. Trompeter | Robotic work object cell calibration system |
| US10744658B2 (en) * | 2014-03-04 | 2020-08-18 | Ge-Hitachi Nuclear Energy Americas Llc | Nuclear reactor light-based fuel alignment systems and methods |
| ES2754039T3 (es) * | 2014-04-30 | 2020-04-15 | Abb Schweiz Ag | Procedimiento para calibrar un punto central de una herramienta para un sistema de robot industrial |
| ES2753441T3 (es) * | 2015-01-16 | 2020-04-08 | Comau Spa | Aparato para el remachado |
| CN107209003B (zh) * | 2015-02-13 | 2020-12-18 | 思想外科有限公司 | 用于机器人校准和监测的激光测量仪 |
| US9815204B2 (en) * | 2016-01-22 | 2017-11-14 | The Boeing Company | Apparatus and method to optically locate workpiece for robotic operations |
| NO20170740A1 (no) * | 2017-05-04 | 2018-11-05 | Haris Jasarevic | Bruk og styring av verktøy |
| US10331728B2 (en) | 2017-05-30 | 2019-06-25 | General Electric Company | System and method of robot calibration using image data |
| TWI650626B (zh) * | 2017-08-15 | 2019-02-11 | 由田新技股份有限公司 | 基於三維影像之機械手臂加工方法及系統 |
| CN107511829B (zh) * | 2017-10-11 | 2020-06-05 | 深圳市威博特科技有限公司 | 机械手的控制方法及装置、可读存储介质及自动化设备 |
| CN109074103B (zh) * | 2017-12-23 | 2021-12-24 | 深圳市大疆创新科技有限公司 | 一种云台校准方法及云台设备 |
| PL3769174T3 (pl) * | 2018-03-21 | 2022-10-24 | Realtime Robotics, Inc. | Planowanie przemieszczania robota do różnych środowisk i zadań oraz jego ulepszone działanie |
| CN108742846B (zh) * | 2018-04-08 | 2020-06-19 | 武汉联影智融医疗科技有限公司 | 手术机器人空间坐标系校验装置及应用其的校验方法 |
| JP7190152B2 (ja) * | 2018-06-04 | 2022-12-15 | 株式会社キーレックス | 多関節ロボット用の教示データ作成方法 |
| KR102354913B1 (ko) * | 2018-06-04 | 2022-01-24 | 가부시키가이샤 키렉스 | 다관절 로봇용의 학습 데이터 작성 방법 및 학습 데이터 교정용 좌표계 검출기구 |
| JP7088543B2 (ja) * | 2018-06-12 | 2022-06-21 | 株式会社キーレックス | 教示データ校正用座標系検出具 |
| US10576636B1 (en) * | 2019-04-12 | 2020-03-03 | Mujin, Inc. | Method and control system for and updating camera calibration for robot control |
| CN110258030A (zh) * | 2019-07-03 | 2019-09-20 | 珞石(北京)科技有限公司 | 一种基于机器人控制系统的布料缝制速度同步方法 |
| IL274911B2 (en) * | 2020-05-25 | 2023-10-01 | Metalix Cad/Cam Ltd | Device and method for calibrating a robotic cell |
| EP4137278A4 (en) * | 2020-05-28 | 2024-05-01 | Siemens Ltd China | METHOD, DEVICE AND SYSTEM FOR CALIBRATING A ROBOT TOOL CENTRAL POINT |
| CN112454356A (zh) * | 2020-11-12 | 2021-03-09 | 中国煤炭科工集团太原研究院有限公司 | 掘进机悬臂运动轨迹自动控制方法及装置 |
| US11911915B2 (en) | 2021-06-09 | 2024-02-27 | Intrinsic Innovation Llc | Determining robotic calibration processes |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4753569A (en) | 1982-12-28 | 1988-06-28 | Diffracto, Ltd. | Robot calibration |
| US5910719A (en) | 1996-09-17 | 1999-06-08 | Cycle Time Corporation | Tool center point calibration for spot welding guns |
| US6044308A (en) | 1997-06-13 | 2000-03-28 | Huissoon; Jan Paul | Method and device for robot tool frame calibration |
| US6408252B1 (en) | 1997-08-01 | 2002-06-18 | Dynalog, Inc. | Calibration system and displacement measurement device |
| AU9223298A (en) | 1997-09-04 | 1999-03-22 | Dynalog, Inc. | Method for calibration of a robot inspection system |
| US6070109A (en) * | 1998-03-10 | 2000-05-30 | Fanuc Robotics North America, Inc. | Robot calibration system |
| US6283824B1 (en) | 1998-05-21 | 2001-09-04 | Tycom Corporation | Automated drill bit re-sharpening and verification system |
| CA2244037A1 (en) | 1998-09-09 | 2000-03-09 | Servo-Robot Inc. | Apparatus to help in robot teaching |
| DE19854011A1 (de) | 1998-11-12 | 2000-05-25 | Knoll Alois | Einrichtung und Verfahren zum Vermessen von Mechanismen und ihrer Stellung |
| US6694629B2 (en) | 2002-02-27 | 2004-02-24 | Trimble Navigation Llc | Laser projector for producing intersecting lines on a surface |
| EP1489425B1 (de) | 2003-06-20 | 2007-02-14 | Tecan Trading AG | Vorrichtung und Verfahren zum Positionieren von Funktionselementen und/oder Behältern auf dem Arbeitsfeld eines Labormanipulators mittels zweier sich kreuzender Lichtschranken |
| JP4138599B2 (ja) | 2003-08-11 | 2008-08-27 | 富士通株式会社 | ロボットアームの校正方法及び校正装置 |
| DE102004010312B8 (de) | 2004-03-03 | 2009-07-30 | Advintec Gmbh | Verfahren zum Einmessen eines Arbeitspunktes |
| JP3946716B2 (ja) * | 2004-07-28 | 2007-07-18 | ファナック株式会社 | ロボットシステムにおける3次元視覚センサの再校正方法及び装置 |
| US8989897B2 (en) * | 2004-11-19 | 2015-03-24 | Dynalog, Inc. | Robot-cell calibration |
| US7756608B2 (en) | 2005-02-28 | 2010-07-13 | Abb Ab | System for calibration of an industrial robot and a method thereof |
| JP2006289531A (ja) * | 2005-04-07 | 2006-10-26 | Seiko Epson Corp | ロボット位置教示のための移動制御装置、ロボットの位置教示装置、ロボット位置教示のための移動制御方法、ロボットの位置教示方法及びロボット位置教示のための移動制御プログラム |
| US7620144B2 (en) * | 2006-06-28 | 2009-11-17 | Accuray Incorporated | Parallel stereovision geometry in image-guided radiosurgery |
| JP4982150B2 (ja) | 2006-10-30 | 2012-07-25 | 信越化学工業株式会社 | ロボットの移動システム |
| US20080276473A1 (en) * | 2007-05-07 | 2008-11-13 | Michael Raschella | Method of projecting zero-convergence aiming beam on a target and zero-convergence laser aiming system |
| EP2271889A4 (en) | 2008-03-21 | 2011-11-02 | Variation Reduction Solutions Inc | EXTERNAL SYSTEM FOR IMPROVING ROBOTIC ACCURACY |
| WO2009146164A1 (en) | 2008-04-15 | 2009-12-03 | Biomet 3I, Llc | Method of creating an accurate bone and soft-tissue digital dental model |
| WO2009132703A1 (en) | 2008-04-30 | 2009-11-05 | Abb Technology Ab | A method and a system for determining the relation between a robot coordinate system and a local coordinate system located in the working range of the robot |
| CN102119072B (zh) | 2008-06-09 | 2013-09-11 | Abb技术有限公司 | 有助于对离线编程机器人单元进行校准的方法和系统 |
| US8180487B1 (en) | 2008-09-30 | 2012-05-15 | Western Digital Technologies, Inc. | Calibrated vision based robotic system |
| US9266241B2 (en) * | 2011-03-14 | 2016-02-23 | Matthew E. Trompeter | Robotic work object cell calibration system |
| ES2769304T3 (es) | 2012-04-05 | 2020-06-25 | Fidia Spa | Dispositivo para corrección de errores para máquinas CNC |
| US8485017B1 (en) * | 2012-08-01 | 2013-07-16 | Matthew E. Trompeter | Robotic work object cell calibration system |
-
2012
- 2012-02-01 US US13/385,091 patent/US9266241B2/en active Active
- 2012-03-07 US US13/385,797 patent/US9061421B2/en active Active
- 2012-03-14 CA CA2828856A patent/CA2828856A1/en not_active Abandoned
- 2012-03-14 CN CN2012800129990A patent/CN103442858A/zh not_active Withdrawn
- 2012-03-14 AU AU2012229542A patent/AU2012229542A1/en not_active Withdrawn
- 2012-03-14 JP JP2013558009A patent/JP2014508050A/ja active Pending
- 2012-03-14 BR BR112013023413A patent/BR112013023413A2/pt not_active IP Right Cessation
- 2012-03-14 EP EP12757103.2A patent/EP2686143A2/en not_active Withdrawn
- 2012-03-14 KR KR1020137023867A patent/KR20130141664A/ko not_active Application Discontinuation
- 2012-03-14 MX MX2013010355A patent/MX2013010355A/es not_active Application Discontinuation
- 2012-03-14 WO PCT/US2012/000140 patent/WO2012125209A2/en active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| US9266241B2 (en) | 2016-02-23 |
| AU2012229542A1 (en) | 2013-10-03 |
| BR112013023413A2 (pt) | 2017-03-01 |
| MX2013010355A (es) | 2014-04-14 |
| US20120265341A1 (en) | 2012-10-18 |
| US9061421B2 (en) | 2015-06-23 |
| EP2686143A2 (en) | 2014-01-22 |
| WO2012125209A2 (en) | 2012-09-20 |
| US20120283874A1 (en) | 2012-11-08 |
| WO2012125209A3 (en) | 2012-12-27 |
| CA2828856A1 (en) | 2012-09-20 |
| JP2014508050A (ja) | 2014-04-03 |
| CN103442858A (zh) | 2013-12-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20130141664A (ko) | 로봇의 작업 오브젝트 셀 캘리브레이션 디바이스, 시스템, 및 방법 | |
| US8485017B1 (en) | Robotic work object cell calibration system | |
| US9669546B2 (en) | Robotic work object cell calibration method | |
| US8989897B2 (en) | Robot-cell calibration | |
| JP4171488B2 (ja) | オフラインプログラミング装置 | |
| US6822412B1 (en) | Method for calibrating and programming of a robot application | |
| US20150158180A1 (en) | Robot Calibration Systems | |
| EP2350750B1 (en) | A method and an apparatus for calibration of an industrial robot system | |
| CN102985232B (zh) | 用于位于可移动平台上的机器人的校准的方法 | |
| US20140365006A1 (en) | Visual Datum Reference Tool | |
| US9713869B2 (en) | Calibration of robot work paths | |
| KR101797122B1 (ko) | 이동형 3차원 좌표 측정기(cmm)의 에러 측정 및 보상 방법 | |
| JP2010149267A (ja) | ロボットのキャリブレーション方法および装置 | |
| US20220105640A1 (en) | Method Of Calibrating A Tool Of An Industrial Robot, Control System And Industrial Robot | |
| TW201901183A (zh) | 精確定位方法、定位系統以及機械手裝置 | |
| JP2019063955A (ja) | ロボットシステム、動作制御方法及び動作制御プログラム | |
| CN109719714B (zh) | 机器人、机器人系统以及机器人的坐标系设定方法 | |
| Novák et al. | Calibrating industrial robots with absolute position tracking system | |
| KR100644174B1 (ko) | 로봇 용접의 보정방법 | |
| CN107009360A (zh) | 一种六轴多关节工业机器人的校准装置及方法 | |
| WO2022181688A1 (ja) | ロボットの設置位置測定装置、設置位置測定方法、ロボット制御装置、教示システムおよびシミュレーション装置 | |
| Liu et al. | An automated method to calibrate industrial robot kinematic parameters using Spherical Surface constraint approach | |
| TWI710441B (zh) | 機器手臂的座標校正方法 | |
| US11654562B2 (en) | Apparatus, robot control device, robot system, and method of setting robot coordinate system | |
| Mazni et al. | Calibration of Industrial Fanuc 430iF Series Robot Arm |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |