KR20130132018A - 스위치 자석휠 및 영구자석을 이용한 이동장치 및 그 제어방법 - Google Patents
스위치 자석휠 및 영구자석을 이용한 이동장치 및 그 제어방법 Download PDFInfo
- Publication number
- KR20130132018A KR20130132018A KR1020120056062A KR20120056062A KR20130132018A KR 20130132018 A KR20130132018 A KR 20130132018A KR 1020120056062 A KR1020120056062 A KR 1020120056062A KR 20120056062 A KR20120056062 A KR 20120056062A KR 20130132018 A KR20130132018 A KR 20130132018A
- Authority
- KR
- South Korea
- Prior art keywords
- switching
- magnetic pole
- permanent magnet
- driving
- moving device
- Prior art date
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/007—Manipulators mounted on wheels or on carriages mounted on wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/06—Manipulators combined with a control cab for the operator
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B3/00—Hulls characterised by their structure or component parts
- B63B3/02—Hulls assembled from prefabricated sub-units
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16K—VALVES; TAPS; COCKS; ACTUATING-FLOATS; DEVICES FOR VENTING OR AERATING
- F16K31/00—Actuating devices; Operating means; Releasing devices
- F16K31/02—Actuating devices; Operating means; Releasing devices electric; magnetic
- F16K31/06—Actuating devices; Operating means; Releasing devices electric; magnetic using a magnet, e.g. diaphragm valves, cutting off by means of a liquid
- F16K31/08—Actuating devices; Operating means; Releasing devices electric; magnetic using a magnet, e.g. diaphragm valves, cutting off by means of a liquid using a permanent magnet
- F16K31/082—Actuating devices; Operating means; Releasing devices electric; magnetic using a magnet, e.g. diaphragm valves, cutting off by means of a liquid using a permanent magnet using a electromagnet and a permanent magnet
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Ocean & Marine Engineering (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
본 발명은 차체프레임부에 탑재되고 주행면과 일정갭을 두고 일정자극형태로 설치되어 몸체로부터 발산되는 자기력에 의해 주행면상에 분포된 이물질을 흡착시킴과 더불어 주행면으로부터 이동장치가 이탈되지 않도록 자장을 제공하는 영구자석부재와; 상기 차체프레임부에 탑재되고 영구자석부재와 연동하여 주행면에 자기력을 스위칭인가하므로 이동장치가 주행면에 탈부착되도록 하는 스위칭자석휠부재와; 상기 차체프레임부에 탑재되고 상기 이동장치의 구동모터부를 제어하여 이동장치를 조향제어하는 제어구동부를 포함하여 구성되는 스위치 자석휠 및 영구자석을 이용한 이동장치 및 그 제어방법을 제공한다.
상기와 같은 본 발명은 영구자석부재와 연계되는 스위칭자석휠부재가 그 내부의 스위칭자극부재의 극성을 변경시키는 방식으로 이동장치를 구동하기 때문에 이동장치가 작업중에는 선박의 외벽에 강력히 흡착되었다가 이동시에는 자기력을 일부 약화시켜 신속히 이동할 수 있으므로 그에 따라 탈부착이 용이할 뿐만아니라 이동안전성도 상당히 확보할 수 있는 효과가 있다.
상기와 같은 본 발명은 영구자석부재와 연계되는 스위칭자석휠부재가 그 내부의 스위칭자극부재의 극성을 변경시키는 방식으로 이동장치를 구동하기 때문에 이동장치가 작업중에는 선박의 외벽에 강력히 흡착되었다가 이동시에는 자기력을 일부 약화시켜 신속히 이동할 수 있으므로 그에 따라 탈부착이 용이할 뿐만아니라 이동안전성도 상당히 확보할 수 있는 효과가 있다.
Description
본 발명은 스위치 자석휠 및 영구자석을 이용한 이동장치 및 그 제어방법에 관한 것으로, 특히 복수개의 스위치휠사이에 일정자극배열을 갖는 고정자극부재와 이 고정자극부재의 자극에 대응하여 스위칭 가능한 자극을 갖는 스위칭자극부재로 구성된 스위칭자석휠부재와 주행면에 대해 일정간극을 갖는 영구자석부재를 구비하여 선박의 외벽을 안전하면서도 용이하게 이동할 수 있는 스위치 자석휠 및 영구자석을 이용한 이동장치 및 그 제어방법에 관한 것이다.
일반적으로 대형선박의 건조작업은 선체의 각 부분에 대응하는 선체블록을 각각의 작업장에서 제작한 후, 그 제작된 선체블록을 도크로 옮겨 조립하는 방식으로 이루어지게 된다. 그리고 상기와 같은 선체블록들의 조립을 위해서는 외판 작업, 예컨대 용접이나 블라스팅 등의 작업이 요구되며, 이러한 외판 작업의 대부분은 작업공구를 지참한 작업자가 고소차나 곤도라에 의하여 작업위치로 이동되면서 작업이 이루어지게 된다. 이때, 상기와 같은 고소차나 곤도라를 이용한 작업은 작업자의 위치이동이 용이하지 못할 뿐만 아니라, 작업 중 추락사고가 발생할 가능성이 있어, 근년에는 그러한 점을 고려하여 선체의 외판에 레일을 부설하고, 레일을 따라 이동하는 주행장치에 용접토치나 블라스팅 건과 같은 작업장치를 장착하여 자동으로 작업하는 방식이 사용되고 있거나 혹은 레일 없이 선체의 외판에 진공 또는 자력에 의해 부착되어 이동하는 자율 주행장치에 대한 연구가 활발히 이루어지고 있다.
여기서 상기와 같은 선박외벽 이동장치와 관련된 선행기술로는 현대중공업 주식회사에 의해 출원된 한국특허출원 제 2009-0042372호 가 공지되어 있다.
그러면, 상기와 같은 종래 선박외벽 이동장치를 도 1을 참고로 살펴보면, 그 몸체의 일측에 용접토치나 블라스팅 건(70) 등이 탑재되는 몸체프레임부(71)와;
상기 몸체프레임부(71)의 하부에 다수개 설치되어 선박의 외벽(72)에 진공방식으로 이동 흡착가능한 흡착부재(73)를 포함하여 구성된다.
여기서, 상기 이동장치(74)는 외부에 구비된 제어반(75)을 통해 케이블(76)을 이용하여 제어하게된다.
한편, 상기와 같은 종래 선박외벽 이동장치의 동작은 먼저, 선박의 외벽(72)에 용접을 하거나 혹은 페인팅작업을 할 필요가 있을 경우 제어반(75)을 통해 조정하여 몸체프레임부(71)의 하부에 다수개 설치된 흡착부재(73)를 구동하여 선박의 외벽(72)을 흡착 및 해제를 반복하면서 해당 작업위치로 이동장치(74)를 이송시킨다. 그리고 상기와 같은 방식을 통해 이동장치(74)가 선박의 외벽(72)을 따라 이동하여 해당 작업위치로 이동될 경우 그 몸체프레임부(71)의 상부에 탑재한 용접토치나 블라스팅 건(70) 등을 이용하여 설정된 용접작업을 하거나 혹은 페인팅작업을 실행한다.
그러나, 상기와 같은 종래 선박외벽 이동장치는 예컨대, 흡착부재가 진공흡착식의 경우 대용량의 진공을 발생시키기 위한 별도시설이 이격거리상에 존재해야 하고, 진공 패드의 마모 및 부착면의 상태 등에 따라서 흡착력에 큰 차이가 발생되며어 이동장치의 안전이동성을 매우 저하시켰으며, 과도한 진공흡착을 시도하는 경우 선체외벽의 도장부분에 손상을 유발시킬 수 있는 문제점이 있었다.
설령 상기와 같은 종래 선박외벽 이동장치의 흡착부재가 영구자석의 흡착식인 경우에도 자석과 철판이 직접 밀착되지 않는 경우 충분한 부착력을 확보하지 못하므로 중량물의 장치를 부착하기 위해서는 대단히 많은 영구자석을 필요로 하고, 특히, 자력에 의하여 외판에 부착된 상태에서는 장치의 이동방향을 바꿀 수 없다는 문제점이 있었다.
이에 본 발명은 상기와 같은 종래 기술의 제반 문제점을 해결하기위해 발명된 것으로, 영구자석부재와 그와 연계되는 스위칭자석휠부재가 그 내부의 스위칭자극부재의 극성을 작업과 이동시에 변경시키는 방식으로 이동장치를 용이하게 구동하기 때문에 탈부착이 용이한 스위치 자석휠 및 영구자석을 이용한 이동장치 및 그 제어방법을 제공함에 그 목적이 있다.
본 발명의 또 다른 목적은 이동장치의 중단부에 구비된 영구자석부재와 이와 연계되는 스위칭자석휠부재가 연계하여 선박의 외벽에 강력히 부착된 상태로 작업을 용이하게 수행하거나 혹은 자기력의 일부를 변경하여 다른 방향으로 신속히 이동할 수 있게되므로 그에 따라 이동장치의 안전이동성도 확보하는 스위치 자석휠 및 영구자석을 이용한 이동장치 및 그 제어방법을 제공하는데 있다.
상기와 같은 목적을 달성하기 위한 본 발명은 주행바퀴가 몸체의 앞쪽과 뒤쪽에 복수개 대칭되게 각기 설치되되, 그 뒤쪽에 구비된 주행바퀴의 구동축이 몸체의 중단부에 각기 설치된 구동모터부의 회전구동축에 벨트로 매개로 각기 연결설치되며,몸체의 외형을 형성하는 차체프레임부와;
상기 차체프레임부에 탑재되고 주행면과 일정갭을 두고 일정자극형태로 설치되어 몸체로부터 발산되는 자기력에 의해 주행면상에 분포된 이물질을 흡착시킴과 더불어 주행면으로부터 이동장치가 이탈되지 않도록 자장을 제공하는 영구자석부재와;
상기 구동모터부의 회전구동축에 연동되도록 결합설치되고 영구자석부재와 연동하여 주행면에 자기력을 스위칭인가하므로 이동장치가 주행면에 탈부착되도록 형성되며, 차체프레임부에 탑재되는 스위칭자석휠부재와;
상기 차체프레임부에 탑재되고 상기 이동장치의 좌, 우에 각기 설치된 구동모터부의 속도를 각기 다르게 제어하여이동장치를조향제어하는제어구동부를포함하여구성되는스위치자석휠및영구자석을이용한이동장치를제공한다.
본 발명의 또 다른 특징은 이동장치의 스위칭자석휠부재를 온(ON)시켜 영구자석부재의 자극방향과 고정자극부재 및 스위칭자극부재의 자극방향을 모두 동일한 방향으로 설정한 후 이동장치가 주행면을 따라 이동하도록 설정하는 초기이동과정과;
상기 초기이동과정후에 제어구동부로 방향절환제어신호를 인가하여 이동장치의 방향을 절환하므로 이동장치가 작업위치로 이송하도록 제어하는 방향절환과정과;
상기 방향절환과정후에 이동장치가 작업위치로 이동될 경우 제어구동부가 몸체프레임부에 탑재된 작업장비를 구동하여 그 설정된 작업을 실행하는 작업실행과정과;
상기 작업실행과정후에 설정된 작업이 종료되어 이동장치가 회수위치로 이송될 경우 스위칭자석휠부재를 오프(OFF)시켜 영구자석부재의 자극방향과 고정자극부재의 자극방향은 동일하게 하는한편 스위칭자극부재의 자극방향은 반대방향으로 스위칭되게 하여 이동장치가 주행면으로부터 떨어지게 하는 장비해제과정을 포함하여 구성되는 스위치 자석휠 및 영구자석을 이용한 이동장치의 제어방법을 제공한다.
상기와 같은 본 발명에 의하면, 영구자석부재와 그와 연계되는 스위칭자석휠부재가 그 내부의 스위칭자극부재의 극성을 변경시키는 방식으로 이동장치를 구동하기 때문에 이동장치가 작업중에는 선박의 외벽에 강력히 흡착되었다가 이동시에는 자기력을 일부 약화시켜 신속히 이동할 수 있으므로 그에 따라 탈부착이 용이할 뿐만아니라 이동안전성도 상당히 확보할 수 있는 효과가 있다.
도 1은 종래 선박외벽 이동장치를 설명하는 설명도.
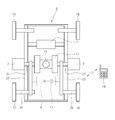
도 2는 본 발명에 의한 이동장치를 평면에서 간략하게 바라본 상태를 설명하는 설명도.
도 3은 본 발명에 의한 이동장치를 측면에서 간략하게 바라본 상태를 설명하는 설명도.
도 4의 (a)는 본 발명 장치의 스위칭자석휠부재의 온상태를 설명하는 설명도,
도 4의 (b)는 본 발명 장치의 스위칭자석휠부재의 오프상태를 설명하는 설명도.
도 5의 (a)-(b)는 본 발명 장치의 스위칭자석휠부재와 영구자석과의 관계에서 온상태를 설명하는 설명도.
도 6의 (a)-(b)는 본 발명 장치의 스위칭자석휠부재와 영구자석과의 관계에서 오프상태를 설명하는 설명도.
도 2는 본 발명에 의한 이동장치를 평면에서 간략하게 바라본 상태를 설명하는 설명도.
도 3은 본 발명에 의한 이동장치를 측면에서 간략하게 바라본 상태를 설명하는 설명도.
도 4의 (a)는 본 발명 장치의 스위칭자석휠부재의 온상태를 설명하는 설명도,
도 4의 (b)는 본 발명 장치의 스위칭자석휠부재의 오프상태를 설명하는 설명도.
도 5의 (a)-(b)는 본 발명 장치의 스위칭자석휠부재와 영구자석과의 관계에서 온상태를 설명하는 설명도.
도 6의 (a)-(b)는 본 발명 장치의 스위칭자석휠부재와 영구자석과의 관계에서 오프상태를 설명하는 설명도.
이하, 본 발명을 첨부된 예시도면에 의거 상세히 설명한다.
본 발명은 도 2 및 도 3에 도시된 바와 같이 주행바퀴(1A-D)가 몸체의 앞쪽과 뒤쪽에 대칭되게 각기 2개씩 설치되되, 그 뒤쪽에 구비된 주행바퀴(1C-D)의 연동구동축(20)이 몸체의 중단부에 각기 설치된 구동모터부(2)의 회전구동축(21)에 벨트(22)로 매개로 각기 연결설치되며, 각종 작업장비(3) 예컨대, 용접토치나 블라스팅 건 등이 탑재되고, 몸체의 외형을 형성하는 차체프레임부(4)와;
상기 차체프레임부(4)에 탑재되고 주행면(5) 즉, 선박의 외벽(5)과 일정갭을 두고 일정자극형태(N극과 S극)로 설치되어 몸체로부터 발산되는 자기력에 의해 주행면상에 분포된 이물질을 흡착시킴과 더불어 주행면(5)으로부터 이동장치(6)가 이탈되지 않도록 자장을 제공하는 영구자석부재(7)와;
상기 구동모터부(2)의 회전구동축(21)에 연동되도록 결합설치되고, 차체프레임부(4)에 탑재되고 영구자석부재(7)와 연동하여 주행면 즉, 선박의 외벽(5)에 자기력을 스위칭인가하므로 이동장치(6)가 주행면(5)에 탈부착되도록 하는 스위칭자석휠부재(8)와;
상기 차체프레임부(4)에 탑재되고 상기 이동장치(6)의 몸체프레임부(10)의 좌, 우에 각기 설치된 구동모터부(2)의 속도를 각기 다르게 제어하여 이동장치(6)를 조향제어하며, 상기 작업장비(3)의 구동을 제어하는 제어구동부(9)를 포함하여 구성된다.
그리고, 상기 스위칭자석휠부재(8)는 몸체프레임부(10)의 좌, 우에 각기 설치된 구동모터부(2)의 회전구동축(21)에 연동가능하게 각기 설치되어 개별적으로 동작되고, 상기 주행바퀴(1A-D)의 직경과 동일한 직경을 가지며, 철재질로 구성되는 스위칭휠(11)과;
상기 스위칭휠(11)의 사이에 위치된 몸체프레임부(10)의 하단부에 영구자석부재(7)의 자극배열과 동일하게 원형형태로 자극배열 예컨대, 원형형태로 N극과 S극 혹은 S극과 N극의 자극배열을 갖도록 고정설치되는 고정자극부재(12)와;
상기 고정자극부재(12)의 자극에 대향하여 원형형태로 일정자극배열 예컨대, N극과 S극 혹은 S극과 N극의 자극배열을 가지며, 이 자극배열을 스위칭가능하게 회전되도록 몸체프레임부(10)의 상부측으로 설치되는 스위칭자극부재(13)와;
상기 스위칭자극부재(13)의 가장자리를 따라 몸체프레임부(10)상에 고정설치되어 스위칭자극부재(13)를 회전시키는 베어링부재(14)와;
상기 스위칭자극부재(13)의 상단 중심부에 몸체의 일측이 연결설치되고, 그 타단부가 몸체프레임부(10)의 중심에 형성된 회전홀(16)을 통과하여 외부로 돌출형성되되, 상기 베어링부재(14)를 매개로 스위칭자극부재(13)의 몸체를 스위칭회전시키는 손잡이부(15)를 포함하여 구성된다.
여기서, 상기 구동모터부(2)는 그 좌,우에 형성된 회전구동축(21)에 스위칭자석휠부재(8)가 각기 연동되도록 결합되어 벨트(22)에 의해 구동되는 뒤쪽의 바퀴(1C-D)와 동시에 연동된다. 또한 상기 제어구동부(9)는 상기 스위칭자석휠부재(8)가 개별 구동하기 때문에 이동장치(6)의 이동시에, 조향을 위해 좌,우에 각기 설치된 모터구동부(2)의 속도를 다르게 제어하여 조향하도록 한다.
또한, 상기 스위칭자석휠부재(8)가 도 4의 (a)에 도시된 바와같이 스위칭 온(ON)상태에 있을 경우(즉, 영구자석부재의 자극방향과 고정자극부재 및 스위칭자극부재의 자극방향이 모두 동일한 방향일 경우) 이 스위칭자석휠부재(8)는 영구자석부재(7)와 함께 대략 300 kgf의 자기력으로 주행면 즉 선박의 외벽(5)을 주행할 수 있는 반면, 상기 스위칭자석휠부재(8)가 도 4의 (b)에 도시된 바와같이 스위칭 오프(Off)상태에 있을 경우(즉, 영구자석부재의 자극방향과 고정자극부재의 자극방향은 동일, 스위칭자극부재의 자극방향은 반대방향일 경우) 이 스위칭자석휠부재(8)는 대략 10 kgf의 자기력밖에 주행면 즉, 선박의 외벽(5)에 인가하지 못하므로 이동장치(6)는 선박의 외벽(5)으로부터 이탈된다.
그리고 상기 이동장치(6)는 다른 실시예로, 무선모듈(17)을 탑재하여 원격지에서 무선원격제어기(18)를 통해 제어구동부(9)로 구동제어신호를 인가하므로 이동장치(6)를 제어할 수 있게된다.
또한 상기 손잡이부(15)는 다른 실시예로, 손잡이부(15)부분을 구동모터(19)로 대체할 경우(스위칭자극부재의 중단부에 설치될 경우) 제어구동부(9)에 의해 그 회전기능이 제어되게 하여 원격지에서도 구동모터(19)를 통해 스위칭자극부재(13)의 몸체를 회전시킬 수 있다.
이때, 상기 구동모터(19)는 스텝핑모터로 구성할 수 있다.
다음에는 상기와 같은 구성으로 된 본 발명의 제어방법을 설명한다.
본 발명의 방법은 도 3에 도시된 바와 같이 초기상태(S1)에서 이동장치의 스위칭자석휠부재를 온(ON)시켜 영구자석부재의 자극방향과 고정자극부재 및 스위칭자극부재의 자극방향을 모두 동일한 방향으로 설정한 후 이동장치가 주행면을 따라 이동하도록 설정하는 초기이동과정(S2)과;
상기 초기이동과정(S2)후에 제어구동부(9)로 방향절환제어신호를 인가하여 이동장치의 방향을 절환하므로 이동장치가 작업위치로 이송하도록 제어하는 방향절환과정(S3)과;
상기 방향절환과정(S3)후에 이동장치가 작업위치로 이동될 경우 제어구동부가 몸체프레임부에 탑재된 작업장비를 구동하여 그 설정된 작업을 실행하는 작업실행과정(S4)과;
상기 작업실행과정(S4)후에 설정된 작업이 종료되어 이동장치가 회수위치로 이송될 경우 스위칭자석휠부재를 오프(OFF)시켜 영구자석부재의 자극방향과 고정자극부재의 자극방향은 동일하게 하는한편 스위칭자극부재의 자극방향은 반대방향으로 스위칭되게 하여 이동장치가 주행면으로부터 떨어지게 하는 장비해제과정(S5)을 포함하여 구성된다.
그리고, 상기 방향절환과정(S3)은 이동장치에 탑재된 무선모듈(17)로 원격지에서 무선원격제어기(18)를 통해 구동제어신호를 인가하므로 이동장치(6)의 방향절환을 제어하는 원격방향절환단계를 더 포함한다.
환언하면, 본원발명의 이동장치(6)의 동작은 먼저, 선박의 외벽(5)에 용접을 하거나 혹은 페인팅작업을 할 필요가 있을 경우 이동장치(6)의 외부에 구비된 제어기(도시안됨)로 그 연결된 케이블(도시안됨)을 통해 동작을 제어하거나 혹은 이동장치(6)에 탑재된 무선모듈(17)을 통해 원격지에서 무선원격제어기(18)로 그 동작을 제어하게된다.
이때 상기 이동장치(6)를 작업위치로 이동시키기전에 수동모드일 경우 사용자가 손잡이부(15)를 정회전시킬 경우 이 손잡이부(15)와 연동되는 스위칭자석휠부재(8)의 스위칭자극부재(13)의 몸체가 베어링부재(14)를 매개로 스위칭회전되게 되어 그 자극배열이 바뀌게 된다.
여기서, 상기 모드가 자동모드일 경우 사용자는 원격지에서 무선원격제어기(18)를 통해 이동장치에 탑재된 무선모듈(17)로 스위칭제어신호를 인가하여 스위칭자극부재(13)의 자극배열을 스위칭하므로 스위칭자석휠부재(8)를 온(ON)시킬 수도 있다.
다시말해서, 상기 스위칭자석휠부재(8)는 도 5의 (a-b)에 도시된 바와같이 손잡이부(15)가 정회전됨에 따라 스위칭 온(ON)상태로 변경되는데, 즉, 영구자석부재(7)의 자극방향(N,S방향)과 고정자극부재(12)의 자극방향(N,S방향) 및 스위칭자극부재의 자극방향(N,S방향)이 모두 동일한 방향으로 유지되어 이 스위칭자극부재(13)와 고정자극부재(12)의 양단으로부터 각기 나온 자기력선이 그 양단에 위치한 철재질로된 각 스위칭휠(11)을 경유하여 영구자석부재(7)로 유입되어 자기폐회로를 형성하기 때문에 상기 스위칭자석휠부재(8)는 영구자석부재(7)와 함께 대략 300 kgf의 강력한 자기력이 주행면 즉 선박의 외벽(5)에 인가되므로 이동장치(6)가 선박의 외벽(5)으로부터 이탈되지 않고 주행할 수 있게된다.
한편, 상기와 같은 과정을 통해 스위칭자석휠부재(8)를 온(ON)시킨후에 제어구동부(9)로 방향절환제어신호를 인가하면 상기 제어구동부(9)가 좌, 우에 각기 설치된 이동장치(6)의 구동모터부(2)의 속도를 각기 다르게 제어된다.
이때 상기 좌, 우에 각기 설치된 구동모터부(2)의 회전구동축(21)이 조향을 위해 각기 다른 속도로 회전하게되는데, 이렇게 다른 속도로 회전하는 회전구동축(21)의 회전력은 그 해당 회전구동축(21)에 각기 연동결합되는 스위칭자석휠부재(8)와 뒤쪽의 바퀴(1C-D)로 벨트(22)에 의해 각기 전달된다. 따라서, 상기와 같이 이동장치(6)의 좌,우에 설치된 구동모터부(2)가 각기 다른 속도로 회전함에 따라 해당 구동모터부(2)의 회전구동축(21)과 벨트(22)를 매개로 연동하는 뒤쪽의 바퀴(1C-D)들도 각기 다른 속도로 연동되어 회전하므로 그에 따라 이동장치(6)의 몸체도 조향제어되면서 이동장치(6)가 방향을 절환하게 되어 선박의 외벽(5)을 따라 작업위치로 이동하게된다.
그리고 상기와 같은 방향절환과정을 통해 이동장치(6)가 작업위치로 이동될 경우 제어구동부(9)는 몸체프레임부(10)에 탑재된 작업장비(3) 예컨대, 용접토치나 블라스팅 건(3) 등을 이용하여 설정된 용접작업을 하거나 혹은 페인팅작업을 실행한다.
그리고 상기와 같이 작업이 완료될 경우 제어구동부(9)로 방향절환제어신호를 인가하게되면 상기 제어구동부(9)는 이동장치(6)의 구동모터부(2)를 제어하여 이동장치(6)를 조향제어하므로 이동장치(6)가 방향을 절환하면서 선박의 외벽(5)을 따라 복귀위치로 내려오게된다.
이때 상기와 같이 설정된 작업이 종료되어 이동장치(6)가 회수위치로 이송될 경우 도 6의 (a-b)에 도시된 바와같이 스위칭자석휠부재(8)를 오프(Off)시키게되는데, 수동모드일 경우 사용자가 손잡이부(15)를 역회전시키게되고 그에따라 이 손잡이부(15)와 연동되는 스위칭자석휠부재(8)의 스위칭자극부재(13)의 몸체가 베어링부재(14)를 매개로 스위칭 역회전되게 되어 그 자극배열이 바뀌게 된다. 반면에 상기 이동장치(6)에 손잡이부(15) 대신에 구동모터(19), 더나아가 스텝핑모터가 장착되었을 경우 자동모드를 통해 원격지에서 상기 스템핑모터(19)를 역회전시켜 상기 손잡이부(15)와 같이 스위칭자극부재(13)의 자극배열을 스위칭시키게된다. 즉, 상기 영구자석부재(7)의 자극방향(N,S방향)과 고정자극부재(12)의 자극방향(N,S방향)은 동일하게하나, 스위칭자극부재(13)의 자극방향(S,N방향)은 반대방향으로 스위칭되게 하여 상기 자기폐회로가 차단되게 되기 때문에 상기 스위칭자석휠부재(8)는 영구자석부재(7)와 함께 대략 10 kgf의 약한 자기력만이 주행면 즉 선박의 외벽(5)에 인가되므로 이동장치(6)는 선박의 외벽(5)으로부터 이탈되게 된다.
1A-D: 주행바퀴 2 : 구동모터부
3 : 작업장비 4 : 차체프레임부
5 : 주행면 6 : 이동장치
7 : 영구자석부재 8 : 스위칭자석휠부재
9 : 제어구동부 10: 몸체프레임부
11: 스위칭휠 12: 고정자극부재
13: 스위칭자극부재 14: 베어링부재
15: 손잡이부 16: 회전홀
17: 무선모듈 18: 무선원격제어기
19: 구동모터 20: 연동구동축
21: 회전구동축 22: 벨트
3 : 작업장비 4 : 차체프레임부
5 : 주행면 6 : 이동장치
7 : 영구자석부재 8 : 스위칭자석휠부재
9 : 제어구동부 10: 몸체프레임부
11: 스위칭휠 12: 고정자극부재
13: 스위칭자극부재 14: 베어링부재
15: 손잡이부 16: 회전홀
17: 무선모듈 18: 무선원격제어기
19: 구동모터 20: 연동구동축
21: 회전구동축 22: 벨트
Claims (8)
- 주행바퀴가 몸체의 앞쪽과 뒤쪽에 복수개 대칭되게 각기 설치되되, 그 뒤쪽에 구비된 주행바퀴의 구동축이 몸체의 중단부에 각기 설치된 구동모터부의 회전구동축에 벨트로 매개로 각기 연결설치되며,몸체의 외형을 형성하는 차체프레임부와;
상기 차체프레임부에 탑재되고 주행면과 일정갭을 두고 일정자극형태로 설치되어 몸체로부터 발산되는 자기력에 의해 주행면상에 분포된 이물질을 흡착시킴과 더불어 주행면으로부터 이동장치가 이탈되지 않도록 자장을 제공하는 영구자석부재와;
상기 구동모터부의 회전구동축에 연동되도록 결합설치되고 영구자석부재와 연동하여 주행면에 자기력을 스위칭인가하므로 이동장치가 주행면에 탈부착되도록 형성되며, 차체프레임부에 탑재되는 스위칭자석휠부재와;
상기 차체프레임부에 탑재되고 상기 이동장치의 좌, 우에 각기 설치된 구동모터부의 속도를 각기 다르게 제어하여 이동장치를 조향제어하는 제어구동부를 포함하여 구성되는 스위치 자석휠 및 영구자석을 이용한 이동장치. - 제1항에 있어서, 상기 스위칭자석휠부재는 몸체프레임부의 좌, 우에 각기 설치된 구동모터부의 회전구동축에 연동가능하게 각기 설치되어 개별적으로 동작되고, 상기 주행바퀴의 직경과 동일한 직경을 가지며, 철재질로 구성되는 스위치휠과;
상기 스위칭휠의 사이에 위치된 몸체프레임부의 하단부에 영구자석부재의 자극배열과 동일하게 원형형태로 자극배열을 갖도록 고정설치되는 고정자극부재와;
상기 고정자극부재의 자극에 대향하여 원형형태로 일정자극배열을 가지며, 이 자극배열을 스위칭가능하게 회전되도록 몸체프레임부의 상부측으로 설치되는 스위칭자극부재와;
상기 스위칭자극부재의 가장자리를 따라 몸체프레임부상에 고정설치되어 스위칭자극부재를 회전시키는 베어링부재와;
상기 스위칭자극부재의 상단 중심부에 몸체의 일측이 연결설치되고, 손잡이가 형성된 그 타단부가 몸체프레임부의 중심에 형성된 회전홀을 통과하여 외부로 돌출형성되되, 상기 베어링부재를 매개로 스위칭자극부재의 몸체를 스위칭회전시키는 스위칭손잡이부를 포함하여 구성되는 스위치 자석휠 및 영구자석을 이용한 이동장치. - 제2항에 있어서, 상기 스위칭자석휠부재는 영구자석부재의 자극방향과 고정자극부재 및 스위칭자극부재의 자극방향이 모두 동일한 방향인 온(ON)상태와, 영구자석부재의 자극방향과 고정자극부재의 자극방향은 동일한 반면 스위칭자극부재의 자극방향은 반대방향인 오프(OFF)상태를 갖도록 제어되는 것을 특징으로 하는 스위치 자석휠 및 영구자석을 이용한 이동장치.
- 제2항에 있어서, 상기 이동장치는 원격지에서 무선원격제어기를 통해 제어구동부로 구동제어신호를 인가하므로 이동장치를 제어할 수 있도록 무선모듈이 탑재되는 것을 특징으로 하는 스위치 자석휠 및 영구자석을 이용한 이동장치.
- 제2항에 있어서, 상기 스위칭손잡이부는 스위칭자극부재(13)의 중단부에 설치되고 제어구동부(9)에 의해 그 회전기능이 제어되어 스위칭자극부재(13)의 몸체를 회전시키는 구동모터가 설치되는 것을 특징으로 하는 스위치 자석휠 및 영구자석을 이용한 이동장치.
- 제5항에 있어서, 상기 구동모터는 스텝핑모터인 것을 특징으로 하는 스위치 자석휠 및 영구자석을 이용한 이동장치.
- 이동장치의 스위칭자석휠부재를 온(ON)시켜 영구자석부재의 자극방향과 고정자극부재 및 스위칭자극부재의 자극방향을 모두 동일한 방향으로 설정한 후 이동장치가 주행면을 따라 이동하도록 설정하는 초기이동과정과;
상기 초기이동과정후에 제어구동부로 방향절환제어신호를 인가하여 이동장치의 방향을 절환하므로 이동장치가 작업위치로 이송하도록 제어하는 방향절환과정과;
상기 방향절환과정후에 이동장치가 작업위치로 이동될 경우 제어구동부가 몸체프레임부에 탑재된 작업장비를 구동하여 그 설정된 작업을 실행하는 작업실행과정과;
상기 작업실행과정후에 설정된 작업이 종료되어 이동장치가 회수위치로 이송될 경우 스위칭자석휠부재를 오프(OFF)시켜 영구자석부재의 자극방향과 고정자극부재의 자극방향은 동일하게 하는한편 스위칭자극부재의 자극방향은 반대방향으로 스위칭되게 하여 이동장치가 주행면으로부터 떨어지게 하는 장비해제과정을 포함하여 구성되는 스위치 자석휠 및 영구자석을 이용한 이동장치의 제어방법. - 제7항에 있어서, 상기 방향절환과정은 이동장치에 탑재된 무선모듈로 원격지에서 무선원격제어기를 통해 구동제어신호를 인가하므로 이동장치의 방향절환을 제어하는 원격방향절환단계를 더 포함하는 것을 특징으로 하는 스위치 자석휠 및 영구자석을 이용한 이동장치의 제어방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120056062A KR20130132018A (ko) | 2012-05-25 | 2012-05-25 | 스위치 자석휠 및 영구자석을 이용한 이동장치 및 그 제어방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120056062A KR20130132018A (ko) | 2012-05-25 | 2012-05-25 | 스위치 자석휠 및 영구자석을 이용한 이동장치 및 그 제어방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20130132018A true KR20130132018A (ko) | 2013-12-04 |
Family
ID=49981020
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020120056062A KR20130132018A (ko) | 2012-05-25 | 2012-05-25 | 스위치 자석휠 및 영구자석을 이용한 이동장치 및 그 제어방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20130132018A (ko) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103979031A (zh) * | 2014-05-20 | 2014-08-13 | 中科华核电技术研究院有限公司 | 核电站蒸汽发生器二次侧云台式爬壁检测机器人 |
| CN104816763A (zh) * | 2015-05-08 | 2015-08-05 | 浙江海洋学院 | 大型船体表面吸附式施工平台 |
| KR20150123371A (ko) * | 2014-04-24 | 2015-11-04 | 대한민국(해양경찰청장) | 등선로봇 |
| KR20170131971A (ko) * | 2016-05-23 | 2017-12-01 | 두산중공업 주식회사 | 증기발생기의 이물질 검사 및 제거 장치 |
| CN111252160A (zh) * | 2020-03-31 | 2020-06-09 | 北京博清科技有限公司 | 一种爬壁机器人 |
| CN111497961A (zh) * | 2020-04-26 | 2020-08-07 | 中船黄埔文冲船舶有限公司 | 一种电磁吸附式爬壁机器人 |
| CN112596541A (zh) * | 2020-12-10 | 2021-04-02 | 江苏科技大学 | 一种自移动式胎架机构控制系统和方法 |
| EP3877244A4 (en) * | 2018-11-05 | 2022-08-10 | Magswitch Technology Worldwide Pty Ltd. | MAGNETIC BASE FOR ROBOTIC ARM |
| CN115122361A (zh) * | 2022-08-30 | 2022-09-30 | 天科泰瑞检测(天津)有限公司 | 一种化工罐车内窥式检测机器人 |
| KR20230075949A (ko) * | 2021-11-23 | 2023-05-31 | 한국생산기술연구원 | 선박 세척용 로봇 |
-
2012
- 2012-05-25 KR KR1020120056062A patent/KR20130132018A/ko not_active Application Discontinuation
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150123371A (ko) * | 2014-04-24 | 2015-11-04 | 대한민국(해양경찰청장) | 등선로봇 |
| CN103979031A (zh) * | 2014-05-20 | 2014-08-13 | 中科华核电技术研究院有限公司 | 核电站蒸汽发生器二次侧云台式爬壁检测机器人 |
| CN103979031B (zh) * | 2014-05-20 | 2017-08-29 | 中广核研究院有限公司 | 核电站蒸汽发生器二次侧云台式爬壁检测机器人 |
| CN104816763A (zh) * | 2015-05-08 | 2015-08-05 | 浙江海洋学院 | 大型船体表面吸附式施工平台 |
| KR20170131971A (ko) * | 2016-05-23 | 2017-12-01 | 두산중공업 주식회사 | 증기발생기의 이물질 검사 및 제거 장치 |
| EP3877244A4 (en) * | 2018-11-05 | 2022-08-10 | Magswitch Technology Worldwide Pty Ltd. | MAGNETIC BASE FOR ROBOTIC ARM |
| CN111252160A (zh) * | 2020-03-31 | 2020-06-09 | 北京博清科技有限公司 | 一种爬壁机器人 |
| CN111497961A (zh) * | 2020-04-26 | 2020-08-07 | 中船黄埔文冲船舶有限公司 | 一种电磁吸附式爬壁机器人 |
| CN111497961B (zh) * | 2020-04-26 | 2022-03-08 | 中船黄埔文冲船舶有限公司 | 一种电磁吸附式爬壁机器人 |
| CN112596541A (zh) * | 2020-12-10 | 2021-04-02 | 江苏科技大学 | 一种自移动式胎架机构控制系统和方法 |
| KR20230075949A (ko) * | 2021-11-23 | 2023-05-31 | 한국생산기술연구원 | 선박 세척용 로봇 |
| CN115122361A (zh) * | 2022-08-30 | 2022-09-30 | 天科泰瑞检测(天津)有限公司 | 一种化工罐车内窥式检测机器人 |
| CN115122361B (zh) * | 2022-08-30 | 2022-11-04 | 天科泰瑞检测(天津)有限公司 | 一种化工罐车内窥式检测机器人 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20130132018A (ko) | 스위치 자석휠 및 영구자석을 이용한 이동장치 및 그 제어방법 | |
| US20170362068A1 (en) | Multifunctional vehicle lifting, steering, moving and obstacle crossing device | |
| KR101004957B1 (ko) | 모터를 이용한 4륜 구동 및 4륜 조향 방식의 전방향성 주행로봇 시스템 | |
| US3682265A (en) | Magnet vehicle | |
| KR102041723B1 (ko) | 바퀴의 방향 전환 없이 전방향 자율주행이 가능한 중량물 이송장치 | |
| KR101916477B1 (ko) | 선체 외벽 자율주행 장치 | |
| CN110194209A (zh) | 驱动转向机构、车体轮系驱动装置及控制方法、车辆 | |
| KR101252619B1 (ko) | 전 방향 자동 주행 기능을 가지는 차동식 주행로봇 | |
| CN113401239A (zh) | 轮履结合的爬壁机器人 | |
| KR200481836Y1 (ko) | 이동로봇의 원터치 고정기구 | |
| JP5346480B2 (ja) | 無人搬送車の走行モード切替制御装置及び切替制御方法 | |
| JP2007314170A (ja) | 路面及び線路走行用の入替器 | |
| KR20150054053A (ko) | 전자석 바퀴를 이용한 그라인더 장치 | |
| JP2019025501A (ja) | 走行台車 | |
| WO2011152274A1 (ja) | 走行玩具 | |
| JPH06126660A (ja) | 吸着式移動マニピュレータ | |
| JP2006134248A (ja) | 自走台車の走行制御方法 | |
| KR20130051215A (ko) | 무레일 용접장치 | |
| KR20050115388A (ko) | 무선 원격제어기능을 갖춘 전기용접 캐리지 | |
| CN101909811A (zh) | 焊接用台架 | |
| KR20170001090U (ko) | 전동 카트 | |
| KR101236839B1 (ko) | 도장 장치 | |
| CN110065553A (zh) | 一种底盘和自动导引运输车 | |
| KR20110129631A (ko) | 이동형 감시 로봇 시스템 | |
| KR20100123251A (ko) | 선체 외판 자율 주행장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |