KR20120030813A - 영상 데이터 처리 방법 및 이를 수행하는 표시 장치 - Google Patents
영상 데이터 처리 방법 및 이를 수행하는 표시 장치 Download PDFInfo
- Publication number
- KR20120030813A KR20120030813A KR1020100092575A KR20100092575A KR20120030813A KR 20120030813 A KR20120030813 A KR 20120030813A KR 1020100092575 A KR1020100092575 A KR 1020100092575A KR 20100092575 A KR20100092575 A KR 20100092575A KR 20120030813 A KR20120030813 A KR 20120030813A
- Authority
- KR
- South Korea
- Prior art keywords
- frame
- motion
- original image
- interpolation
- image frames
- Prior art date
Links
Images










Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/01—Conversion of standards, e.g. involving analogue television standards or digital television standards processed at pixel level
- H04N7/0135—Conversion of standards, e.g. involving analogue television standards or digital television standards processed at pixel level involving interpolation processes
- H04N7/014—Conversion of standards, e.g. involving analogue television standards or digital television standards processed at pixel level involving interpolation processes involving the use of motion vectors
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G5/00—Control arrangements or circuits for visual indicators common to cathode-ray tube indicators and other visual indicators
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G3/00—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes
- G09G3/20—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes for presentation of an assembly of a number of characters, e.g. a page, by composing the assembly by combination of individual elements arranged in a matrix no fixed position being assigned to or needed to be assigned to the individual characters or partial characters
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G3/00—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes
- G09G3/20—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes for presentation of an assembly of a number of characters, e.g. a page, by composing the assembly by combination of individual elements arranged in a matrix no fixed position being assigned to or needed to be assigned to the individual characters or partial characters
- G09G3/34—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes for presentation of an assembly of a number of characters, e.g. a page, by composing the assembly by combination of individual elements arranged in a matrix no fixed position being assigned to or needed to be assigned to the individual characters or partial characters by control of light from an independent source
- G09G3/36—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes for presentation of an assembly of a number of characters, e.g. a page, by composing the assembly by combination of individual elements arranged in a matrix no fixed position being assigned to or needed to be assigned to the individual characters or partial characters by control of light from an independent source using liquid crystals
- G09G3/3611—Control of matrices with row and column drivers
- G09G3/3648—Control of matrices with row and column drivers using an active matrix
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/59—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving spatial sub-sampling or interpolation, e.g. alteration of picture size or resolution
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G2320/00—Control of display operating conditions
- G09G2320/02—Improving the quality of display appearance
- G09G2320/0233—Improving the luminance or brightness uniformity across the screen
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- Computer Hardware Design (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Crystallography & Structural Chemistry (AREA)
- Television Systems (AREA)
- Control Of Indicators Other Than Cathode Ray Tubes (AREA)
- Liquid Crystal Display Device Control (AREA)
Abstract
영상 데이터 처리 방법에서, 제1 원본 영상 프레임 및 제1 원본 영상 프레임과 다른 제2 원본 영상 프레임들의 데이터를 움직임 추정하여 제1 및 제2 움직임 벡터들을 산출한다. 제1 및 제2 움직임 벡터들을 이용하여 샘플 프레임을 생성한다. 제1 원본 영상 프레임과 샘플 프레임의 비교 결과에 따라 인접한 두 개의 영상 프레임들의 평균 휘도값을 갖는 적어도 하나의 휘도 보간 프레임을 생성한다. 제1 및 제2 원본 영상 프레임들 사이에 휘도 보간 프레임을 삽입한다. 움직임 보간된 움직임 보간 프레임을 삽입함에 따라 발생하는 영상 떨림과 같은 화질 이상을 해결할 수 있으므로 표시품질을 향상시킬 수 있다.
Description
본 발명은 영상 데이터 처리 방법 및 이를 수행하는 위한 표시 장치에 관한 것으로, 보다 상세하게는 고속 프레임의 영상을 표시하기 위한 영상 데이터 처리 방법 및 이를 수행하는 표시 장치에 관한 것이다.
일반적으로, 액정 표시장치는 액정의 광투과율을 이용하여 영상을 표시하는 액정표시패널 및 상기 액정표시패널의 하부에 배치되어 상기 액정표시패널로 광을 제공하는 백라이트 어셈블리를 포함한다.
상기 액정표시장치(LCD)는 노트북, PC 등의 모니터로서 문자, 정지화상 디스플레이 성능을 향상시키면서 시장을 확대해 왔다. 최근에는 고해상도의 동영상 및 3차원 입체영상을 이용한 컴퓨터 게임 등과 같은 응용 기술에 채용되고 있다.
일반적으로 고해상도의 동영상을 구현하기 위해 프레임 레이트 제어 기술을 이용하여 기존 60Hz의 주파수를 갖는 신호의 프레임 레이트를 120Hz 또는 240Hz의 고주파수로 증가시키고 있다. 이를 위해 움직임 추정 및 움직임 보간을 통해 움직임이 보간된 움직임 보간 프레임을 생성하고, 현재 프레임과 이전 프레임 사이에 상기 움직임 보간 프레임을 삽입하는 방식을 사용하고 있다. 이러한 움직임 보간 프레임을 삽입하기 위해서는 기본적으로 고속 프레임 구동 방식이 사용된다.
상기와 같이 고속 프레임 구동시 움직임 추정 및 보간을 위한 많은 연산으로 인해 상기 움직임 보간 프레임을 생성하는 칩에 발열 문제가 발생한다. 또한, 움직임 추정 에러가 발생하는 경우 삽입된 상기 움직임 보간 프레임에 의해 영상이 부드럽지 않고 영상이 흔들리거나 떨려 보이는 문제점이 발생할 수 있다.
이에 본 발명의 기술적 과제는 이러한 점에서 착안된 것으로, 본 발명의 목적은 표시 품질을 향상시키기 위한 영상 데이터 처리 방법을 제공하는 것이다.
본 발명의 다른 목적은 상기 영상 데이터 처리 방법을 수행하는 데 적합한 표시 장치를 제공하는 것이다.
상기한 본 발명의 목적을 실현하기 위한 일 실시예에 따른 영상 데이터 처리 방법에서, 제1 원본 영상 프레임 및 상기 제1 원본 영상 프레임과 다른 제2 원본 영상 프레임들의 데이터를 움직임 추정하여 제1 및 제2 움직임 벡터들을 산출한다. 상기 제1 및 제2 움직임 벡터들을 이용하여 샘플 프레임을 생성한다. 상기 제1 원본 영상 프레임과 상기 샘플 프레임의 비교 결과에 따라 인접한 두 개의 영상 프레임들의 평균 휘도값을 갖는 적어도 하나의 휘도 보간 프레임을 생성한다. 상기 제1 및 제2 원본 영상 프레임들 사이에 상기 휘도 보간 프레임을 삽입한다.
본 발명의 실시예에서, 상기 휘도 보간 프레임을 생성하는 단계에서는 상기 제1 원본 영상 프레임과 상기 샘플 프레임의 비교결과 움직임 추정 에러가 기 설정된 임계치를 초과하는 경우에 상기 인접한 두 개의 영상 프레임들을 이용하여 상기 휘도 보간 프레임을 생성한다.
본 발명의 실시예에서, 상기 인접한 두 개의 영상 프레임들은 상기 제1 및 제2 원본 영상 프레임들일 수 있다.
본 발명의 실시예에서, 상기 제1 및 제2 원본 영상 프레임들은 60Hz의 프레임 주파수로 수신되고, 상기 휘도 보간 프레임이 삽입된 상기 제1 및 제2 원본 영상 프레임들은 240Hz의 프레임 주파수로 출력될 수 있다.
본 발명의 다른 실시예에서, 상기 제1 및 제2 원본 영상 프레임들은 24Hz의 프레임 주파수로 수신되고, 상기 휘도 보간 프레임이 삽입된 상기 제1 및 제2 원본 영상 프레임들은 240Hz의 프레임 주파수로 출력될 수 있다.
본 발명의 실시예에서, 상기 제1 및 제2 움직임 벡터들의 가중치를 고려하여 적어도 하나의 움직임 보간 프레임을 생성하는 단계 및 상기 제1 및 제2 원본 프레임들 사이에 상기 움직임 보간 프레임을 삽입하는 단계를 더 포함하며, 상기 인접한 두 개의 영상 프레임들은 상기 제1 원본 영상 프레임과 상기 움직임 보간 프레임, 인접한 상기 움직임 보간 프레임들, 및 상기 움직임 보간 프레임들과 상기 제2 원본 영상 프레임들 중 적어도 어느 하나일 수 있다.
본 발명의 실시예에서, 상기 움직임 보간 프레임과 상기 휘도 보간 프레임은 1:2 또는 2:1의 비율로 삽입될 수 있다.
본 발명의 실시예에서, 상기 움직임 보간 프레임과 상기 휘도 보간 프레임은 4:5의 비율로 삽입될 수 있다.
상기한 본 발명의 또 다른 목적을 실현하기 위한 일 실시예에 따른 표시 장치는, 표시 패널, 데이터 처리부 및 패널 구동부를 포함할 수 있다. 상기 표시 패널은 영상을 표시한다. 상기 데이터 처리부는 제1 원본 영상 프레임과 상기 제1 원본 영상 프레임과 다른 제2 원본 영상 프레임들의 데이터를 움직임 추정하여 산출된 제1 및 제2 움직임 벡터들을 이용하여 샘플 프레임을 생성하고, 상기 제1 원본 영상 프레임과 상기 샘플 프레임의 비교 결과에 따라 인접한 두 개의 영상 프레임들의 평균 휘도값을 갖는 적어도 하나의 휘도 보간 프레임을 생성하며, 상기 제1 및 제2 원본 영상 프레임들 사이에 상기 휘도 보간 프레임을 삽입하여 출력한다. 상기 패널 구동부는 상기 데이터 처리부에서 출력되는 프레임들의 데이터를 상기 표시 패널에 출력한다.
본 발명의 실시예에서, 상기 데이터 처리부는 상기 제1 및 제2 움직임 벡터들을 산출하는 움직임 추정부, 상기 샘플 프레임 및 상기 휘도 보간 프레임을 생성하는 움직임 보간부, 및 상기 제1 및 제2 원본 영상 프레임들 사이에 상기 휘도 보간 프레임을 삽입하여 출력하는 출력부를 포함할 수 있다.
이러한 영상 데이터 처리 방법 및 이를 수행하는 표시 장치에 의하면, 움직임 추정 에러 발생시 인접한 프레임들의 평균 휘도값을 갖는 휘도 보간 프레임 또는 상기 휘도 보간 프레임과 움직임 보간 프레임을 혼합하여 삽입함으로써 발열 문제 및 영상 떨림과 같은 화질 이상을 해결할 수 있다. 따라서, 표시 품질을 향상시킬 수 있다.
도 1은 본 발명의 실시예 1에 따른 표시 장치의 블록도이다.
도 2는 도 1에 도시된 데이터 처리부에 대한 블록도이다.
도 3은 도 2에 도시된 움직임 보간부의 움직임 보간 방법을 설명하기 위한 개념도이다.
도 4는 도 2에 도시된 데이터 처리부의 구동 방법을 설명하기 위한 흐름도이다.
도 5는 본 발명의 실시예 2에 따른 데이터 처리부에 대한 블록도이다.
도 6은 도 5에 도시된 움직임 보간부의 움직임 보간 방법을 설명하기 위한 개념도이다.
도 7은 도 5에 도시된 데이터 처리부의 구동 방법을 설명하기 위한 흐름도이다.
도 8은 본 발명의 실시예 3에 따른 데이터 처리부에 대한 블록도이다.
도 9는 도 8에 도시된 움직임 보간부의 움직임 보간 방법을 설명하기 위한 개념도이다.
도 10은 도 8에 도시된 데이터 처리부의 구동 방법을 설명하기 위한 흐름도이다.
도 11은 본 발명의 실시예 4에 따른 데이터 처리부에 대한 블록도이다.
도 12은 도 11에 도시된 움직임 보간부의 움직임 보간 방법을 설명하기 위한 개념도이다.
도 13은 도 11에 도시된 데이터 처리부의 구동 방법을 설명하기 위한 흐름도이다.
도 14는 본 발명의 실시예 5에 따른 데이터 처리부에 대한 블록도이다.
도 15은 도 14에 도시된 움직임 보간부의 움직임 보간 방법을 설명하기 위한 개념도이다.
도 16은 도 14에 도시된 데이터 처리부의 구동 방법을 설명하기 위한 흐름도이다.
도 2는 도 1에 도시된 데이터 처리부에 대한 블록도이다.
도 3은 도 2에 도시된 움직임 보간부의 움직임 보간 방법을 설명하기 위한 개념도이다.
도 4는 도 2에 도시된 데이터 처리부의 구동 방법을 설명하기 위한 흐름도이다.
도 5는 본 발명의 실시예 2에 따른 데이터 처리부에 대한 블록도이다.
도 6은 도 5에 도시된 움직임 보간부의 움직임 보간 방법을 설명하기 위한 개념도이다.
도 7은 도 5에 도시된 데이터 처리부의 구동 방법을 설명하기 위한 흐름도이다.
도 8은 본 발명의 실시예 3에 따른 데이터 처리부에 대한 블록도이다.
도 9는 도 8에 도시된 움직임 보간부의 움직임 보간 방법을 설명하기 위한 개념도이다.
도 10은 도 8에 도시된 데이터 처리부의 구동 방법을 설명하기 위한 흐름도이다.
도 11은 본 발명의 실시예 4에 따른 데이터 처리부에 대한 블록도이다.
도 12은 도 11에 도시된 움직임 보간부의 움직임 보간 방법을 설명하기 위한 개념도이다.
도 13은 도 11에 도시된 데이터 처리부의 구동 방법을 설명하기 위한 흐름도이다.
도 14는 본 발명의 실시예 5에 따른 데이터 처리부에 대한 블록도이다.
도 15은 도 14에 도시된 움직임 보간부의 움직임 보간 방법을 설명하기 위한 개념도이다.
도 16은 도 14에 도시된 데이터 처리부의 구동 방법을 설명하기 위한 흐름도이다.
이하에서는 도면들을 참조하여 본 발명의 바람직한 실시예들을 보다 상세하게 설명하기로 한다.
실시예 1
도 1은 본 발명의 실시예 1에 따른 표시 장치의 블록도이다.
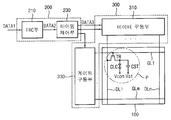
도 1을 참조하면, 본 실시예에 따른 표시 패널(100), 데이터 처리부(200) 및 패널 구동부(300)를 포함한다.
상기 표시 패널(100)은 복수의 게이트 라인들(GL1 내지 GLm), 복수의 데이터 라인들(DL1 내지 DLn) 및 복수의 화소(P)들을 포함한다. 각 화소(P)는 구동 소자(TR), 상기 구동 소자(TR)에 전기적으로 연결된 액정 커패시터(CLC) 및 스토리지 커패시터(CST)를 포함한다. 상기 표시 패널(100)은 서로 대향하는 두 개의 기판과 상기 두 개의 기판 사이에 개재된 액정층을 포함할 수 있다.
상기 데이터 처리부(200)는 프레임 레이트 제어(Frame Rate Control: FRC)부(210) 및 타이밍 제어부(230)를 포함한다.
상기 FRC부(210)는 외부로부터 제1 프레임 주파수로 입력되는 입력 영상의 프레임 데이터(DATA1)를 상기 제1 프레임 주파수보다 빠른 제2 프레임 주파수로 변환한다. 여기서, 상기 제1 프레임 주파수는 60Hz이고, 상기 제2 프레임 주파수는 240Hz일 수 있다. 상기 FRC부(210)는 제1 원본 영상 프레임 및 상기 제1 원본 영상 프레임과 다른 제2 원본 영상 프레임들의 데이터를 움직임 추정하여 산출한 제1 및 제2 움직임 벡터들을 이용하여 샘플 프레임을 생성한다. 상기 FRC부(210)는 상기 제1 원본 영상 프레임과 상기 샘플 프레임의 비교 결과에 인접한 두 개의 영상 프레임들의 평균 휘도값을 갖는 적어도 하나의 휘도 보간 프레임을 생성한다. 상기 FRC부(210)는 상기 제1 및 제2 영상 프레임들 사이에 상기 후도 보간 프레임을 삽입하여 상기 입력 영상의 프레임 레이트를 변환시킬 수 있다.
상기 타이밍 제어부(230)는 상기 데이터 처리부(200)로부터 프레임 레이트 변환된 데이터(DATA2)를 수신하고, 수평 라인 단위로 상기 패널 구동부(300)에 출력한다. 또한, 상기 타이밍 제어부(230)는 외부로부터 수신된 제어신호를 이용하여 상기 패널 구동부(300)의 구동 타이밍을 제어하기 위한 제어신호를 생성한다.
상기 패널 구동부(300)는 데이터 구동부(310) 및 게이트 구동부(330)를 포함할 수 있다.
상기 데이터 구동부(310)는 상기 타이밍 제어부(230)로부터 수신한 데이터(DATA3)를 아날로그 형태의 데이터 전압으로 변환한다. 상기 데이터 구동부(310)는 상기 데이터 전압을 상기 데이터 라인들(DL1 내지 DLn)에 출력한다.
상기 게이트 구동부(330)는 상기 데이터 구동부(310)의 출력에 동기되어 상기 게이트 라인들(GL1 내지 GLm)에 게이트 신호들을 출력한다.
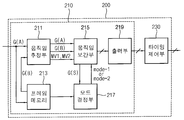
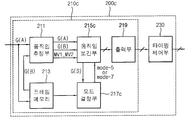
도 2는 도 1에 도시된 데이터 처리부에 대한 블록도이다. 도 3은 도 2에 도시된 움직임 보간부의 동작을 설명하기 위한 개념도이다.
도 1 내지 도 3을 참조하면, 상기 데이터 처리부(200)는 상기 FRC부(210) 및 상기 타이밍 제어부(230)를 포함한다. 상기 FRC부(210)는 움직임 추정부(211), 프레임 메모리(213), 움직임 보간부(215) 및 모드 결정부(217) 및 출력부(219)를 포함할 수 있다.
상기 움직임 추정부(211)는 외부로부터 입력되는 제1 원본 영상 프레임의 데이터(G(A))와 상기 프레임 메모리(213)로부터 입력되는 제2 원본 영상 프레임들의 데이터(G(B))의 데이터를 추정하여 제1 및 제2 움직임 벡터들(MV1, MV2)을 산출한다. 여기서, 상기 제1 움직임 벡터(MV1)는 상기 제1 원본 영상 프레임(F(A))을 기준으로 상기 제2 원본 영상 프레임(F(B))의 변화를 고려하여 산출된 움직임 벡터이고, 상기 제2 움직임 벡터(MV2)는 상기 제2 원본 영상 프레임(F(B))을 기준으로 상기 제1 원본 영상 프레임(F(A))의 변화를 고려하여 산출된 움직임 벡터이다. 상기 제1 및 제2 움직임 벡터들(MV1, MV2)은 크기는 동일하나 방향이 서로 상이하다. 상기 움직임 추정부(211)는 블록 매칭 알고리즘(Block Matching Algorithm: BMA)을 이용하여 블록 단위로 움직임을 추정할 수 있다. 또한, 상기 움직임 추정부(211)는 화소 순환 알고리즘(Pixel Recursive Algorithm: PRA)을 이용하여 화소 단위로 움직임을 추정할 수 있다.
상기 움직임 보간부(215)는 상기 모드 결정부(217)의 제어에 따라 제1 보간 모드(MODE 1) 또는 제2 보간 모드(MODE 2)로 동작된다. 상기 제1 보간 모드는 상기 제1 및 제2 움직임 벡터들(MV1, MV2)의 가중치를 고려하여 복수의 움직임 보간 프레임들을 생성하는 모드이고, 상기 제2 보간 모드(MODE 2)는 상기 움직임 보간 프레임들 및 휘도 보간 프레임들을 생성하는 모드이다. 상기 휘도 보간 프레임들은 인접한 두 개의 프레임들의 평균 휘도값을 갖는다.
도 3에 도시된 바와 같이, 입력 영상이 필름 영상인 경우 상기 필름 영상은 24Hz의 프레임 주파수를 갖는다. 상기 필름 영상은 외부 제어장치(미도시)에 의해 3:2 풀-다운 되어 60Hz의 프레임 주파수로 변환된다. 상기 움직임 보간부(215)는 60Hz의 프레임 주파수로 변환된 영상 프레임들을 수신한다. 상기 3:2 풀-다운은 2개의 원본 영상 프레임들로부터 5개의 필드를 생성하는 방식이다. 예를 들면, 첫 번째 원본 영상 프레임으로부터 3개의 필드를 생성하고 두 번째 원본 영상 프레임으로부터 2개의 필드를 생성한다. 상기 FRC부(210)는 수신되는 영상 프레임들을 비교하여 상기 영상 프레임들이 24Hz의 프레임 주파수를 갖는 필름 영상인지 60Hz의 프레임 주파수를 갖는 비디오 영상인지의 여부를 판단할 수 있다.
상기 움직임 보간부(215)는 상기 모드 결정부(217)로부터 상기 제1 보간 모드 신호(mode-1)를 수신하는 경우, 상기 제1 및 제2 움직임 벡터들(MV1, MV2)의 가중치를 고려하여 제1, 제2, 제3, 제4, 제5, 제6, 제7, 제8 및 제9 움직임 보간 프레임들(F(AB1), F(AB2), F(AB3), F(AB4), F(AB5), F(AB6), F(AB7), F(AB8), F(AB9)))을 생성한다.
예를 들면, 상기 제1 움직임 보간 프레임(F(AB1))은 상기 제1 움직임 벡터(MV1)에 대해서는 1/10의 가중치를 적용하고, 상기 제2 움직임 벡터(MV2)에 대해서는 9/10의 가중치를 적용하여 생성할 수 있다. 또한, 상기 제2 움직임 보간 프레임(F(AB2))은 상기 제1 움직임 벡터(MV1)에 대해서는 2/10의 가중치를 적용하고, 상기 제2 움직임 벡터(MV2)에 대해서는 8/10의 가중치를 적용하여 생성할 수 있다. 상기 제2 움직임 보간 프레임(F(AB2))은 상기 제1 움직임 벡터(MV1)에 대해서는 3/10의 가중치를 적용하고, 상기 제2 움직임 벡터(MV2)에 대해서는 7/10의 가중치를 적용하여 생성할 수 있다. 상기 제4 움직임 보간 프레임(F(AB4))은 상기 제1 움직임 벡터(MV1)에 대해서는 4/10의 가중치를 적용하고, 상기 제2 움직임 벡터(MV2)에 대해서는 6/10의 가중치를 적용하여 생성할 수 있다. 상기 제5 움직임 보간 프레임(F(AB5))은 상기 제1 움직임 벡터(MV1)에 대해서는 5/10의 가중치를 적용하고, 상기 제2 움직임 벡터(MV2)에 대해서는 5/10의 가중치를 적용하여 생성할 수 있다. 상기 제6 움직임 보간 프레임은 상기 제1 움직임 벡터(MV1)에 대해서는 6/10의 가중치를 적용하고, 상기 제2 움직임 벡터(MV2)에 대해서는 4/10의 가중치를 적용하여 생성할 수 있다. 상기 제7 움직임 보간 프레임(F(AB7))은 상기 제1 움직임 벡터(MV1)에 대해서는 7/10의 가중치를 적용하고, 상기 제2 움직임 벡터(MV2)에 대해서는 3/10의 가중치를 적용하여 생성할 수 있다. 상기 제8 움직임 보간 프레임(F(AB8))은 상기 제1 움직임 벡터(MV1)에 대해서는 8/10의 가중치를 적용하고, 상기 제2 움직임 벡터(MV2)에 대해서는 2/10의 가중치를 적용하여 생성할 수 있다. 상기 제9 움직임 보간 프레임(F(AB9))은 상기 제1 움직임 벡터(MV1)에 대해서는 9/10의 가중치를 적용하고, 상기 제2 움직임 벡터(MV2)에 대해서는 1/10의 가중치를 적용하여 생성할 수 있다.
한편, 상기 모드 결정부(217)로부터 상기 제2 보간 모드로 신호를 수신하는 경우, 상기 움직임 보간부(215)는 상기 제1 및 제2 움직임 벡터들(MV1, MV2)의 가중치를 고려하여 제1, 제2, 제3 및 제4 움직임 보간 프레임들(F(AB1), F(AB2), F(AB3), F(AB4))을 생성한다. 예를 들면, 상기 제1 움직임 보간 프레임(F(AB1))은 상기 제1 움직임 벡터(MV1)에 대해서는 2/10의 가중치를 적용하고, 상기 제2 움직임 벡터(MV2)에 대해서는 8/10의 가중치를 적용하여 생성할 수 있다. 상기 제2 움직임 보간 프레임(F(AB2))은 상기 제1 움직임 벡터(MV1)에 대해서는 4/10의 가중치를 적용하고, 상기 제2 움직임 벡터(MV2)에 대해서는 6/10의 가중치를 적용하여 생성할 수 있다. 상기 제3 움직임 보간 프레임(F(AB3))은 상기 제1 움직임 벡터(MV1)에 대해서는 6/10의 가중치를 적용하고, 상기 제2 움직임 벡터(MV2)에 대해서는 4/10의 가중치를 적용하여 생성할 수 있다. 상기 제4 움직임 보간 프레임(F(AB4))은 상기 제1 움직임 벡터(MV1)에 대해서는 8/10의 가중치를 적용하고, 상기 제2 움직임 벡터(MV2)에 대해서는 2/10의 가중치를 적용하여 생성할 수 있다.
상기 움직임 보간부(215)는 상기 제1 및 제2 원본 영상 프레임들(F(AB1), F(AB2)) 및 상기 제1 내지 제4 움직임 보간 프레임들(F(AB1) 내지 F(AB4))을 이용하여 제1, 제2, 제3, 제4 및 제5 휘도 보간 프레임들(F(G1), F(G2), F(G3), F(G4), F(G5))을 생성한다. 상기 제1 내지 제5 휘도 보간 프레임들(F(G1) 내지 F(G5))은 각각 인접한 두 개의 프레임들의 평균 휘도값을 가질 수 있다.
예를 들면, 상기 제1 휘도 보간 프레임(F(G1))은 상기 제1 원본 영상 프레임(F(A))과 상기 제1 움직임 보간 프레임(F(AB1))의 평균 휘도값을 가질 수 있다. 상기 제1 휘도 보간 프레임(F(G1))은 상기 제1 원본 영상 프레임(F(A))과 상기 제1 움직임 보간 프레임(F(AB1)) 사이에 삽입된다. 상기 제2 휘도 보간 프레임(F(G2))은 상기 제1 및 제2 움직임 보간 프레임들(F(AB1), F(AB2))의 평균 휘도값을 가질 수 있다. 상기 제2 휘도 보간 프레임(F(G2))은 상기 제1 및 제2 움직임 보간 프레임들(F(AB1), F(AB2)) 사이에 삽입된다. 상기 제3 휘도 보간 프레임(F(G3))은 상기 제2 및 제3 움직임 보간 프레임들(F(AB2), F(AB3))의 평균 휘도값을 가질 수 있다. 상기 제3 휘도 보간 프레임(F(G3))은 상기 제2 및 제3 움직임 보간 프레임들(F(AB2), F(AB3)) 사이에 삽입된다. 상기 제4 휘도 보간 프레임(F(G4))은 상기 제3 및 제4 움직임 보간 프레임들(F(AB3), F(AB4))의 평균 휘도값을 가질 수 있다. 상기 제4 휘도 보간 프레임(F(G4))은 상기 제3 및 제4 움직임 보간 프레임들(F(AB3), F(AB4)) 사이에 삽입된다. 상기 제5 휘도 보간 프레임(F(G5))은 상기 제4 움직임 보간 프레임(F(AB4))과 상기 제2 원본 영상 프레임(F(B))의 평균 휘도값을 가질 수 있다. 상기 제5 휘도 보간 프레임(F(G5))은 상기 제4 움직임 보간 프레임(F(AB4))과 상기 제2 원본 영상 프레임(F(B)) 사이에 삽입된다.
상기 모드 결정부(217)는 움직임 추정 에러를 검출하고, 상기 움직임 추정 에러가 기 설정된 임계치를 초과하는지의 여부에 따라서 상기 움직임 보간부(215)에 상기 제1 보간 모드 신호(mode-1) 또는 상기 제2 보간 모드 신호(mode-2)를 출력할 수 있다. 상기 움직임 추정 에러는 샘플 프레임의 데이터(G(S))와 상기 제1 원본 영상 프레임의 데이터(G(A))를 비교하여 검출할 수 있다. 여기서, 상기 샘플 프레임은 상기 제1 움직임 보간 프레임(F(AB1))일 수 있다. 상기 모드 결정부(217)는 상기 움직임 추정 에러가 상기 임계치 이하인 경우 상기 움직임 보간부(215)에 상기 제1 보간 모드 신호(mode-1)를 출력한다. 이와 달리, 상기 움직임 추정 에러가 상기 임계치를 초과하는 경우, 상기 모드 결정부(217)는 상기 움직임 보간부(215)에 상기 제2 보간 모드 신호(mode-2)를 출력한다.
상기 출력부(219)는 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 상기 제1 내지 제9 움직임 보간 프레임들(F(AB1) 내지 F(AB9)) 또는 상기 제1 내지 제4 움직임 보간 프레임들(F(AB1) 내지 F(AB4)) 및 상기 제1 내지 제5 휘도 보간 프레임들(F(G1) 내지 F(G9))을 삽입하여 출력한다.
도 4는 도 2에 도시된 데이터 처리부의 구동 방법을 설명하기 위한 흐름도이다.
도 2 내지 도 4를 참조하면, 외부로부터 상기 필름 영상에 대응하는 프레임들의 데이터가 수신되면, 상기 움직임 추정부(211)는 상기 프레임들의 데이터를 비교하여 상기 제1 및 제2 원본 영상 프레임들의 데이터(G(A), G(B))를 검출한다.
상기 움직임 추정부(211)는 상기 제1 및 제2 원본 영상 프레임들의 데이터(G(A), G(B))를 움직임 추정하여 상기 제1 및 제2 움직임 벡터들(MV1, MV2)을 산출한다(단계 S110).
상기 움직임 보간부(215)는 상기 제1 및 제2 움직임 벡터들(MV1, MV2)의 가중치를 고려하여 상기 샘플 프레임을 생성한다(단계 S120). 상기 움직임 보간부(215)는 상기 샘플 프레임의 데이터(G(S))를 상기 모드 결정부(217)에 출력한다.
상기 모드 결정부(217)는 상기 움직임 보간부(215)로부터 수신된 상기 샘플 프레임의 데이터(G(S))와 상기 프레임 메모리(213)에 저장된 상기 제1 원본 영상 프레임의 데이터(G(A))를 비교하여 움직임 추정 에러를 검출한다(단계 S130).
상기 모드 결정부(217)는 상기 움직임 추정 에러가 상기 임계치를 초과하는지의 여부를 체크한다(단계 S140). 상기 모드 결정부(217)는 상기 움직임 추정 에러가 상기 임계치 이하인 경우 상기 움직임 보간부(215)에 상기 제1 보간 모드 신호(mode-1)를 출력한다.
상기 제1 보간 모드 신호(mode-1)를 수신한 상기 움직임 보간부(215)는 상기 제1 및 제2 움직임 벡터들(MV1, MV2)의 가중치를 적용하여 상기 제1 내지 제9 움직임 보간 프레임들(F(AB1) 내지 F(AB9))을 생성한다(단계 S150).
상기 출력부(219)는 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 상기 제1 내지 제9 움직임 보간 프레임들(F(AB1) 내지 F(AB9))을 삽입하여 상기 타이밍 제어부(230)에 출력한다(단계 S160).
한편, 상기 모드 결정부(217)는 상기 움직임 추정 에러가 상기 임계치를 초과하는 경우 상기 움직임 보간부(215)에 상기 제2 보간 모드 신호(mode-2)를 출력한다.
상기 제2 보간 모드 신호(mode-2)를 수신한 상기 움직임 보간부(215)는 상기 제1 및 제2 움직임 벡터들(MV1, MV2)의 가중치를 고려하여 상기 제1 내지 제4 움직임 보간 프레임들(F(AB1) 내지 F(AB4))을 생성한다(단계 S170).
상기 움직임 보간부(215)는 상기 제1 및 제2 원본 영상 프레임들(F(AB1), F(AB2)) 및 상기 제1 내지 제4 움직임 보간 프레임(F(AB1) 내지 F(AB4))을 이용하여 상기 제1 내지 제5 휘도 보간 프레임들(F(G1) 내지 F(G5))을 생성한다(S180).
상기 출력부(219)는 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 상기 제1 휘도 보간 프레임(F(G1)), 상기 제1 움직임 보간 프레임(F(AB1)), 상기 제2 휘도 보간 프레임(F(G2)), 상기 제2 움직임 보간 프레임(F(AB2)), 상기 제3 휘도 보간 프레임(F(G3)), 상기 제3 움직임 보간 프레임(F(AB3)), 상기 제4 휘도 보간 프레임(F(G4)), 상기 제4 움직임 보간 프레임(F(AB4)) 및 상기 제5 휘도 보간 프레임(F(G5))을 순차적으로 삽입하여 상기 타이밍 제어부(230)에 출력한다(단계 S190).
본 실시예에 따르면, 상기 움직임 추정 에러가 상기 임계치를 초과하는 경우 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 상기 움직임 보간 프레임과 상기 휘도 보간 프레임이 4:5의 비율로 삽입된다. 따라서, 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 상기 움직임 보간 프레임들만 삽입되는 구성 대비 상기 움직임 보간부(215)의 연산량이 감소되어 상기 FRC부(210)의 발열량이 감소하게 된다.
실시예 2
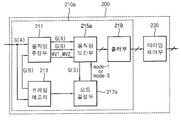
도 5는 본 발명의 실시예 2에 따른 데이터 처리부에 대한 블록도이다. 도 6은 도 5에 도시된 움직임 보간부의 움직임 보간 방법을 설명하기 위한 개념도이다.
본 실시예에 따른 표시 장치는 데이터 처리부(200a)를 제외하고는 실시예 1에 따른 표시 장치와 실질적으로 동일하므로, 상기 데이터 처리부(200a)를 제외한 나머지 구성에 대해서는 도 1을 참조한다. 또한, 본 실시예에 따른 데이터 처리부(200a)는 움직임 보간부(215a) 및 모드 결정부(217a)를 제외하고는 실시예 1에 따른 데이터 처리부(200)와 실질적으로 동일하므로, 동일한 구성요소에는 동일한 참조 부호를 부여하고, 중복되는 부분은 생략한다.
도 5 및 도 6을 참조하면, 상기 데이터 처리부(200)는 FRC부(210a) 및 타이밍 제어부(230)를 포함한다. 상기 FRC부(210a)는 움직임 추정부(211), 프레임 메모리(213), 움직임 보간부(215a), 모드 결정부(217a) 및 출력부(219)를 포함한다.
상기 모드 결정부(217a)는 움직임 추정 에러가 기 설정된 임계치를 초과하는지의 여부를 판단하고, 상기 임계치 초과 여부에 따라 상기 움직임 보간부(215a)의 보간 모드를 결정한다. 예를 들면, 상기 모드 결정부(217a)는 상기 움직임 추정 에러가 상기 임계치 이하인 경우 상기 움직임 보간부(215a)에 제1 보간 모드 신호(mode-1)를 출력한다. 이와 달리, 상기 모드 결정부(217a)는 상기 움직임 추정 에러가 상기 임계치를 초과하는 경우 상기 움직임 보간부(215a)에 제3 보간 모드 신호(moode-3)를 출력한다. 상기 제1 보간 모드(MODE 1)는 도 6에 도시된 바와 같이, 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 상기 움직임 추정부(211)에 의해 산출된 제1 및 제2 움직임 벡터들(MV1, MV2)의 가중치를 고려하여 생성된 제1 내지 제9 움직임 보간 프레임들(F(AB1) 내지 F(AB9))이 삽입되는 모드이다. 상기 제1 내지 제9 움직임 보간 프레임들(F(AB1) 내지 F(AB9))을 생성하는 방법은 상기 도 3을 참조하여 설명한 바와 실질적으로 동일하므로 이에 대한 설명은 생략한다. 상기 제3 보간 모드는 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 제1 내지 제9 휘도 보간 프레임들(F(G1) 내지 F(G9))이 삽입되는 모드이다. 상기 제1 내지 제9 휘도 보간 프레임들(F(G1) 내지 F(G9))은 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B))의 평균 휘도값을 가질 수 있다.
상기 움직임 보간부(215a)는 상기 모드 결정부(217a)로부터 상기 제1 보간 모드 신호(mode-1)가 수신되는 경우 상기 제1 및 제2 움직임 벡터들(MV1, MV2)의 가중치를 고려하여 상기 제1 내지 제9 움직임 보간 프레임들(F(AB1) 내지 F(AB9))을 생성한다. 상기 움직임 보간부(215a)는 상기 모드 결정부(217a)로부터 상기 제3 보간 모드 신호(mode-3)가 수신되는 경우 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B))의 평균 휘도값을 갖는 상기 제1 내지 제9 후도 보간 프레임들을 생성한다.
도 7은 도 5에 도시된 데이터 처리부의 구동 방법을 설명하기 위한 흐름도이다.
본 실시예에 따른 데이터 처리부(200)의 구동 방법은 단계 S210 및 단계 S220을 제외하고는 실시예 1에 따른 데이터 처리부(200)의 구동 방법과 실질적으로 동일하므로, 동일한 스텝에는 동일한 참조 부호를 부여하고, 중복되는 부분은 생략한다.
도 5 내지 도 7을 참조하면, 상기 모드 결정부(217a)는 상기 움직임 추정 에러가 상기 임계치를 초과하는 경우 상기 움직임 보간부(215a)에 상기 제3 보간 모드 신호(mode-3)를 출력한다.
상기 제3 보간 모드 신호(mode-3)를 수신한 상기 움직임 보간부(215a)는 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B))을 이용하여 상기 제1 내지 제9 휘도 보간 프레임들(F(G1) 내지 F(G9))을 생성한다(단계 S210). 상기 제1 내지 제9 휘도 보간 프레임들(F(G1) 내지 F(G9))은 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B))의 평균 휘도값을 갖는다.
상기 출력부(219)는 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 상기 제1 내지 제9 휘도 보간 프레임들(F(G1) 내지 F(G9))을 삽입하여 출력한다(단계 S220).
본 실시예에 따르면, 상기 움직임 보간 프레임과 상기 휘도 보간 프레임이 4:5의 비율로 삽입되는 실시예 1과 비교할 때 상기 움직임 보간부(215a)의 연산량을 더 많이 감소되므로, 상기 연산량이 증가됨에 따라 상기 FRC부(210a)에 발열 문제가 발생하는 것을 방지할 수 있다. 또한, 상기 움직임 추정 에러 발생으로 인해 비정상적인 움직임 보간 프레임이 삽입되어 영상이 매끄럽지 않고 떨려 보이는 문제점이 발생하는 것을 방지할 수 있다.
실시예 3
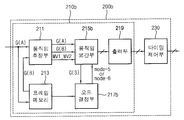
도 8은 본 발명의 실시예 3에 따른 데이터 처리부에 대한 블록도이다. 도 9는 도 8에 도시된 움직임 보간부의 움직임 보간 방법을 설명하기 위한 개념도이다.
본 실시예에 따른 표시 장치는 데이터 처리부(200b)를 제외하고는 실시예 1에 따른 표시 장치와 실질적으로 동일하므로, 상기 데이터 처리부(200b)를 제외한 나머지 구성에 대해서는 도 1을 참조한다. 또한, 본 실시예에 따른 데이터 처리부(200b)는 움직임 보간부(215b) 및 모드 결정부(217b)를 제외하고는 실시예 1에 따른 데이터 처리부(200)와 실질적으로 동일하므로, 동일한 구성요소에는 동일한 참조 부호를 부여하고, 중복되는 부분은 생략한다.
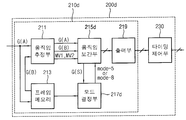
도 8 및 도 9를 참조하면, 상기 데이터 처리부(200b)는 FRC부(210b) 및 타이밍 제어부(230)를 포함한다. 상기 FRC부(210B)는 60Hz의 프레임 주파수를 갖는 비디오 영상을 수신한다. 상기 FRC부(210B)는 상기 비디오 영상의 프레임 주파수를 240Hz의 프레임 주파수로 출력한다. 상기 FRC부(210B)는 움직임 추정부(211), 프레임 메모리(213), 움직임 보간부(215b), 모드 결정부(217b) 및 출력부(219)를 포함한다.
상기 모드 결정부(217b)는 상기 움직임 추정부(211)의 움직임 추정 에러가 기 설정된 임계치를 초과하는지의 여부에 따라 상기 움직임 보간부(215b)의 움직임 보간 모드를 결정한다. 예를 들면, 상기 모드 결정부(217b)는 상기 움직임 추정 에러가 상기 임계치 이하인 경우 상기 움직임 보간부(215b)에 제5 보간 모드 신호(mode-5)를 출력하고, 상기 움직임 추정 에러가 상기 임계치를 초과하는 경우 상기 움직임 보간부(215b)에 제6 보간 모드 신호(mode-6)를 출력한다. 제5 보간 모드(MODE 5)는 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 제1 내지 제3 움직임 보간 프레임들(F(AB1) 내지 F(AB3))이 삽입되는 모드이다. 제6 보간 모드(MODE 6)는 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 제1 및 제2 움직임 보간 프레임(F(AB1), F(AB2) 및 제1 휘도 보간 프레임(F(G1))이 삽입되는 모드이다.
상기 움직임 보간부(215b)는 비디오 영상에 대응되는 제1 및 제2 원본 영상 프레임들(F(A), F(B))은 60Hz의 프레임 주파수로 수신된다. 상기 움직임 보간부(215b)는 상기 모드 결정부(217b)로부터 상기 제5 보간 모드 신호(mode-5)를 수신하는 경우, 상기 움직임 추정부(211)에서 산출된 제1 및 제2 움직임 벡터들(MV1, MV2)의 가중치를 고려하여 상기 제1 내지 제3 움직임 보간 프레임들(F(AB1) 내지 F(AB3))을 생성한다. 예를 들면, 상기 제1 움직임 보간 프레임(F(AB1))은 상기 제1 움직임 벡터(MV1)에 대해서는 1/4의 가중치를 적용하고, 상기 제2 움직임 벡터(MV2)에 대해 3/4의 가중치를 적용하여 생성할 수 있다. 상기 제2 움직임 보간 프레임(F(AB2))은 상기 제1 및 제2 움직임 벡터들(MV1, MV2) 각각에 대해 2/4의 가중치를 적용하여 생성할 수 있다. 상기 제3 움직임 보간 프레임(F(AB3))은 상기 제1 움직임 벡터(MV1)에 대해서는 3/4의 가중치를 적용하고, 상기 제2 움직임 벡터(MV2)에 대해 1/4의 가중치를 적용하여 생성할 수 있다. 상기 출력부(219)는 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 상기 제1 내지 제3 움직임 보간 프레임(F(AB1) 내지 F(AB3))들을 삽입하고, 상기 프레임들의 데이터를 240Hz의 프레임 주파수로 출력한다.
상기 움직임 보간부(215b)는 상기 모드 결정부(217b)로부터 상기 제6 보간 모드 신호(mode-6)를 수신하는 경우, 상기 제1 및 제2 움직임 벡터들(MV1, MV2)을 이용하여 상기 제1 및 제2 움직임 보간 프레임들(F(AB1), F(AB2))을 생성한다. 예를 들면, 상기 제1 움직임 보간 프레임(F(AB1))은 상기 제1 움직임 벡터(MV1)에 대해서는 1/4의 가중치를 적용하고, 상기 제2 움직임 벡터(MV2)에 대해 3/4의 가중치를 적용하여 생성할 수 있다. 상기 제2 움직임 보간 프레임(F(AB2))은 상기 제1 움직임 벡터(MV1)에 대해서는 3/4의 가중치를 적용하고, 상기 제2 움직임 벡터(MV2)에 대해 1/4의 가중치를 적용하여 생성할 수 있다.
상기 움직임 보간부(215b)는 상기 제1 및 제2 움직임 보간 프레임들(F(AB1), F(AB2))을 이용하여 상기 제1 휘도 보간 프레임(F(G1))을 생성한다. 상기 제1 휘도 보간 프레임(F(G1))은 상기 제1 및 제2 움직임 보간 프레임들(F(AB1), F(AB2)) 사이에 삽입되며, 상기 제1 및 제2 움직임 보간 프레임들(F(AB1), F(AB2))의 평균 휘도값을 가질 수 있다.
도 10은 도 8에 도시된 데이터 처리부의 구동 방법을 설명하기 위한 흐름도이다.
본 실시예에 따른 데이터 처리부(200)의 구동 방법은 단계 S310 내지 단계 S350을 제외하고는 실시예 1에 따른 데이터 처리부(200)의 구동 방법과 실질적으로 동일하므로, 동일한 스텝에는 동일한 참조 부호를 부여하고, 중복되는 부분은 생략한다.
도 8 내지 도 10을 참조하면, 상기 모드 결정부(217b)는 상기 움직임 추정 에러가 상기 임계치 이하인 경우 상기 제5 보간 모드 신호(mode-5)를 출력한다.
상기 제5 보간 모드 신호(mode-5)를 수신한 상기 움직임 보간부(215b)는 상기 제1 및 제2 움직임 벡터들(MV1, MV2)을 이용하여 상기 제1 내지 제3 움직임 보간 프레임들(F(AB1) 내지 F(AB3))을 생성한다(단계 S310).
상기 출력부(219)는 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 상기 제1 내지 제3 움직임 보간 프레임들(F(AB1) 내지 F(AB3))을 삽입하여 출력한다(단계 S320).
한편, 상기 모드 결정부(217b)는 상기 움직임 추정 에러가 상기 임계치를 초과하는 경우 상기 제6 보간 모드 신호(mode-6)를 출력한다.
상기 제6 보간 모드 신호(mode-6)가 수신한 상기 움직임 보간부(215b)는 상기 제1 및 제2 움직임 벡터들(MV1, MV2)을 이용하여 상기 제1 및 제2 움직임 보간 프레임들(F(AB1), F(AB2))을 생성한다(단계 S330).
상기 움직임 보간부(215b)는 상기 제1 및 제2 움직임 보간 프레임들(F(AB1), F(AB2))의 평균 휘도값을 갖는 상기 제1 휘도 보간 프레임(F(G1))을 생성한다(단계 S340). 상기 제1 휘도 보간 프레임(F(G1))은 상기 제1 및 제2 움직임 보간 프레임들(F(AB1), F(AB2)) 사이에 삽입된다.
상기 출력부(219)는 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 상기 제1 움직임 보간 프레임(F(AB1)), 상기 제1 휘도 보간 프레임(F(G1)) 및 상기 제2 움직임 보간 프레임(F(AB2))을 순차적으로 삽입하여 출력한다(단계 S350). 도 9에 도시된 바와 같이, 상기 제1 휘도 보간 프레임(F(G1))과 상기 제1 및 제2 움직임 보간 프레임들(F(AB1), F(AB2))은 1:2의 비율로 삽입될 수 있다.
실시예 4
도 11은 본 발명의 실시예 4에 따른 데이터 처리부에 대한 블록도이다. 도 12은 도 11에 도시된 움직임 보간부의 움직임 보간 방법을 설명하기 위한 개념도이다.
본 실시예에 따른 표시 장치는 데이터 처리부(200c)를 제외하고는 실시예 1에 따른 표시 장치와 실질적으로 동일하므로, 상기 데이터 처리부(200c)를 제외한 나머지 구성에 대해서는 도 1을 참조한다. 또한, 본 실시예에 따른 데이터 처리부(200c)는 움직임 보간부(215c) 및 모드 결정부(217c)를 제외하고는 실시예 1에 따른 데이터 처리부(200)와 실질적으로 동일하므로, 동일한 구성요소에는 동일한 참조 부호를 부여하고, 중복되는 부분은 생략한다.
도 11 및 도 12를 참조하면, 상기 데이터 처리부(200c)는 FRC부(210C) 및 타이밍 제어부(230)를 포함한다. 상기 FRC부(210C)는 60Hz의 프레임 주파수를 갖는 비디오 영상을 수신한다. 상기 FRC부(210C)는 상기 비디오 영상의 프레임 주파수를 240Hz의 프레임 주파수로 출력한다. 상기 FRC부(210C)는 움직임 추정부(211), 프레임 메모리(213), 움직임 보간부(215c), 모드 결정부(217c) 및 출력부(219)를 포함한다.
상기 모드 결정부(217c)는 상기 움직임 추정부(211)의 움직임 추정 에러가 기 설정된 임계치를 초과하는지의 여부에 따라 상기 움직임 보간부(215c)의 움직임 보간 모드를 결정한다. 예를 들면, 상기 모드 결정부(217c)는 상기 움직임 추정 에러가 상기 임계치 이하인 경우 상기 움직임 보간부(215c)에 제5 보간 모드 신호(mode-5)를 출력하고, 상기 움직임 추정 에러가 상기 임계치를 초과하는 경우 상기 움직임 보간부(215c)에 제7 보간 모드 신호(mode-7)를 출력한다. 제5 보간 모드(MODE 5)는 도 11에 도시된 바와 같이, 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 상기 움직임 추정부(211)에 의해 산출된 제1 및 제2 움직임 벡터들(MV1, MV2)의 가중치를 고려하여 생성한 제1 내지 제3 움직임 보간 프레임들(F(AB1 내지 F(AB3))이 삽입되는 모드이다. 제7 보간 모드(MODE 7)는 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 제1 움직임 보간 프레임(F(AB1))과 제1 및 제2 휘도 보간 프레임들(F(G1), F(G2))이 삽입되는 모드이다.
상기 움직임 보간부(215c)는 상기 모드 결정부(217c)로부터 상기 제5 보간 모드 신호(mode-5)를 수신하는 경우, 상기 제1 및 제2 움직임 벡터들(MV1, MV2)의 가중치를 고려하여 제1 내지 제3 움직임 보간 프레임들(F(AB1 내지 F(AB3))을 생성한다. 상기 제1 내지 제3 움직임 보간 프레임들(F(AB1 내지 F(AB3))을 생성하는 방법은 도 9를 참조하여 설명한 바와 실질적으로 동일하므로 이에 대한 설명은 생략한다.
상기 움직임 보간부(215c)는 상기 모드 결정부(217c)로부터 상기 제7 보간 모드 신호(mode-7)를 수신하는 경우, 상기 제1 및 제2 움직임 벡터들(MV1, MV2)을 이용하여 상기 제1 움직임 보간 프레임(F(AB1))을 생성한다. 상기 제1 움직임 보간 프레임(F(AB1))은 상기 제1 및 제2 움직임 벡터들(MV1, MV2) 각각에 대해 1/2의 가중치를 적용하여 생성할 수 있다.
상기 움직임 보간부(215c)는 상기 제1 및 제2 원본 영상 프레임 및 상기 제1 움직임 보간 프레임(F(AB1))을 이용하여 상기 제1 및 제2 휘도 보간 프레임들(F(G1), F(G2))을 생성한다. 상기 제1 휘도 보간 프레임(F(G1))은 상기 제1 원본 영상 프레임(F(A))과 상기 제1 움직임 보간 프레임(F(AB1)) 사이에 삽입된다. 상기 제1 휘도 보간 프레임(F(G1))은 상기 제1 원본 영상 프레임(F(A))과 상기 제2 움직임 보간 프레임(F(AB2))의 평균 휘도값을 가질 수 있다. 상기 제2 휘도 보간 프레임(F(G2))은 상기 제2 움직임 보간 프레임(F(AB2))과 상기 제2 원본 영상 프레임(F(B)) 사이에 삽입된다. 상기 제2 휘도 보간 프레임(F(G2))은 상기 제2 움직임 보간 프레임(F(AB2))과 상기 제2 원본 영상 프레임(F(B))의 평균 휘도값을 가질 수 있다.
도 13은 도 11에 도시된 데이터 처리부의 구동 방법을 설명하기 위한 흐름도이다.
본 실시예에 따른 데이터 처리부(200)의 구동 방법은 단계 S410 및 단계 S450을 제외하고는 실시예 1에 따른 데이터 처리부(200)의 구동 방법과 실질적으로 동일하므로, 동일한 스텝에는 동일한 참조 부호를 부여하고, 중복되는 부분은 생략한다.
도 11 내지 도 13을 참조하면, 상기 모드 결정부(217c)는 상기 움직임 추정 에러가 상기 임계치 이하인 경우 상기 제5 보간 모드 신호(mode-5)를 출력한다.
상기 제5 보간 모드 신호(mode-5)를 수신한 상기 움직임 보간부(215c)는 상기 제1 및 제2 움직임 벡터들(MV1, MV2)의 가중치를 고려하여 상기 제1 내지 제3 움직임 보간 프레임들(F(AB1 내지 F(AB3))을 생성한다(단계 S410).
상기 출력부(219)는 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 상기 제1 내지 제3 움직임 보간 프레임들(F(AB1 내지 F(AB3))을 삽입하여 출력한다(단계 S420).
한편, 상기 모드 결정부(217c)는 상기 움직임 추정 에러가 상기 임계치를 초과하는 경우 상기 제7 보간 모드 신호(mode-7)를 출력한다.
상기 제7 보간 모드 신호(mode-7)를 수신한 상기 움직임 보간부(215c)는 상기 제1 및 제2 움직임 벡터들(MV1, MV2)을 이용하여 상기 제1 움직임 보간 프레임(F(AB1))을 생성한다(단계 S430).
상기 움직임 보간부(215c)는 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 및 상기 제1 움직임 보간 프레임(F(AB1))을 이용하여 상기 제1 및 제2 휘도 보간 프레임들(F(G1), F(G2))을 생성한다(단계 S440).
상기 출력부(219)는 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 상기 제1 휘도 보간 프레임(F(G1)), 상기 제2 움직임 보간 프레임(F(AB2)) 및 상기 제2 휘도 보간 프레임(F(G1))을 순차적으로 삽입하여 출력한다(단계 S450).
실시예 5
도 14는 본 발명의 실시예 5에 따른 데이터 처리부에 대한 블록도이다. 도 15은 도 14에 도시된 움직임 보간부의 움직임 보간 방법을 설명하기 위한 개념도이다.
본 실시예에 따른 표시 장치는 데이터 처리부(200d)를 제외하고는 실시예 1에 따른 표시 장치와 실질적으로 동일하므로, 상기 데이터 처리부(200d)를 제외한 나머지 구성에 대해서는 도 1을 참조한다. 또한, 본 실시예에 따른 데이터 처리부(200d)는 움직임 보간부(215d) 및 모드 결정부(217d)를 제외하고는 실시예 1에 따른 데이터 처리부(200)와 실질적으로 동일하므로, 동일한 구성요소에는 동일한 참조 부호를 부여하고, 중복되는 부분은 생략한다.
도 14 및 도 15를 참조하면, 상기 데이터 처리부(200)는 FRC부(210d) 및 타이밍 제어부(230)를 포함한다. 상기 FRC부(210D)는 60Hz의 프레임 주파수를 갖는 비디오 영상을 수신한다. 상기 FRC부(210d)는 상기 비디오 영상의 프레임 주파수를 240Hz의 프레임 주파수로 출력한다. 상기 FRC부(210d)는 움직임 추정부(211), 프레임 메모리(213), 움직임 보간부(215d), 모드 결정부(217d) 및 출력부(219)를 포함한다.
상기 모드 결정부(217d)는 움직임 추정 에러가 기 설정된 임계치를 초과하는지의 여부를 판단하고, 상기 임계치 초과 여부에 따라 상기 움직임 보간부(215d)의 보간 모드를 결정한다. 예를 들면, 상기 모드 결정부(217d)는 상기 움직임 추정 에러가 상기 임계치 이하인 경우 상기 움직임 보간부(215d)에 제5 보간 모드 신호(mode-5)를 출력하고, 상기 움직임 추정 에러가 상기 임계치를 초과하는 경우 상기 움직임 보간부(215d)에 제8 보간 모드 신호를 출력한다. 제5 보간 모드(MODE 5)는 도 15에 도시된 바와 같이, 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 상기 움직임 추정부(211)에 의해 산출된 제1 및 제2 움직임 벡터들(MV1, MV2)의 가중치를 고려하여 생성된 제1 내지 제3 움직임 보간 프레임들(F(AB1) 내지 F(AB2))이 삽입되는 모드이다. 상기 제1 내지 제3 움직임 보간 프레임들(F(AB1) 내지 F(AB2))을 생성하는 방법은 상기 도 9을 참조하여 설명한 바와 실질적으로 동일하므로 이에 대한 설명은 생략한다. 상기 제8 보간 모드는 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 제1 내지 제3 휘도 보간 프레임들(F(G1) 내지 F(G3))이 삽입되는 모드이다. 상기 제1 내지 제3 휘도 보간 프레임들(F(G1) 내지 F(G3))은 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B))의 평균 휘도값을 가질 수 있다.
도 16은 도 14에 도시된 데이터 처리부의 구동 방법을 설명하기 위한 흐름도이다.
본 실시예에 따른 데이터 처리부(200)의 구동 방법은 단계 S510 내지 단계 S520을 제외하고는 실시예 1에 따른 데이터 처리부(200)의 구동 방법과 실질적으로 동일하므로, 동일한 스텝에는 동일한 참조 부호를 부여하고, 중복되는 부분은 생략한다.
도 14 내지 도 16을 참조하면, 상기 모드 결정부(217d)는 상기 움직임 추정 에러가 상기 임계치 이하인 경우 상기 제5 보간 모드 신호(mode-5)를 출력한다.
상기 제5 보간 모드 신호(mode-5)를 수신한 상기 움직임 보간부(215d)는 상기 제1 및 제2 움직임 벡터들(MV1, MV2)의 가중치를 고려하여 상기 제1 내지 제3 움직임 보간 프레임들(F(AB1) 내지 F(AB2))을 생성한다(단계 S510).
상기 출력부(219)는 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 상기 제1 내지 제3 움직임 보간 프레임들(F(AB1) 내지 F(AB2))을 삽입하여 출력한다(단계 S520).
한편, 상기 모드 결정부(217d)는 상기 움직임 추정 에러가 상기 임계치를 초과하는 경우 상기 움직임 보간부(215d)에 상기 제8 보간 모드 신호(mode-8)를 출력한다.
상기 제8 보간 모드 신호(mode-8)를 수신한 상기 움직임 보간부(215d)는 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B))을 이용하여 상기 제1 내지 제3 휘도 보간 프레임들(F(G1) 내지 F(G3))을 생성한다(단계 S530). 상기 제1 내지 제3 휘도 보간 프레임들(F(G1) 내지 F(G3))은 각각 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B))의 평균 휘도값을 가질 수 있다.
상기 출력부(219)는 상기 제1 및 제2 원본 영상 프레임들(F(A), F(B)) 사이에 상기 제1 내지 제3 휘도 보간 프레임들(F(G1) 내지 F(G3))을 순차적으로 삽입하여 출력한다(단계 S540).
본 실시예에 따르면, 실시예 3 및 4 대비 상기 움직임 보간부(215d)의 연산량이감소되어 상기 FRC부(210d)에 발열 문제가 발생하는 것을 방지할 수 있다. 또한, 상기 움직임 추정 에러 발생으로 인해 비정상적인 움직임 보간 프레임이 삽입되어 영상이 매끄럽지 않고 떨려 보이는 문제점이 발생하는 것을 방지할 수 있다.
이상에서 설명한 바와 같이, 본 발명의 실시예들에 따르면, 움직임 추정 에러가 발생하는 경우 인접한 프레임들의 평균 휘도값을 갖는 휘도 보간 프레임 또는 상기 휘도 보간 프레임과 움직임 보간 프레임을 혼합하여 삽입함으로써 발열 문제 및 영상 떨림과 같은 화질 이상을 해결할 수 있다. 따라서, 표시 장치의 표시 품질을 향상시킬 수 있다.
이상에서는 본 발명의 바람직한 실시예들을 참조하여 설명하였지만, 해당 기술분야의 숙련된 당업자 또는 해당 기술분야에 통상의 지식을 갖는 자라면 후술될 특허청구범위에 기재된 본 발명의 사상 및 기술 영역으로부터 벗어나지 않는 범위 내에서 본 발명을 다양하게 수정 및 변경시킬 수 있음을 이해할 수 있을 것이다.
100 : 표시 패널 200 : 데이터 처리부
210 : FRC부 211 : 움직임 추정부
213 : 프레임 메모리 215 : 움직임 보간부
217 : 모드 결정부 219 : 출력부
230 : 타이밍 제어부 300 : 패널 구동부
210 : FRC부 211 : 움직임 추정부
213 : 프레임 메모리 215 : 움직임 보간부
217 : 모드 결정부 219 : 출력부
230 : 타이밍 제어부 300 : 패널 구동부
Claims (20)
- 제1 원본 영상 프레임 및 상기 제1 원본 영상 프레임과 다른 제2 원본 영상 프레임들의 데이터를 움직임 추정하여 제1 및 제2 움직임 벡터들을 산출하는 단계;
상기 제1 및 제2 움직임 벡터들을 이용하여 샘플 프레임을 생성하는 단계;
상기 제1 원본 영상 프레임과 상기 샘플 프레임의 비교 결과에 따라 인접한 두 개의 영상 프레임들의 평균 휘도값을 갖는 적어도 하나의 휘도 보간 프레임을 생성하는 단계; 및
상기 제1 및 제2 원본 영상 프레임들 사이에 상기 휘도 보간 프레임을 삽입하는 단계를 포함하는 영상 데이터 처리 방법. - 제1항에 있어서, 상기 휘도 보간 프레임을 생성하는 단계에서 상기 제1 원본 영상 프레임과 상기 샘플 프레임의 비교결과 움직임 추정 에러가 기 설정된 임계치를 초과하는 경우에 상기 인접한 두 개의 영상 프레임들을 이용하여 상기 휘도 보간 프레임을 생성하는 것을 특징으로 하는 영상 데이터 처리 방법.
- 제2항에 있어서, 상기 인접한 두 개의 영상 프레임들은 상기 제1 및 제2 원본 영상 프레임들인 것을 특징으로 하는 영상 데이터 처리 방법.
- 제3항에 있어서, 상기 제1 및 제2 원본 영상 프레임들은 60Hz의 프레임 주파수로 수신되고, 상기 휘도 보간 프레임이 삽입된 상기 제1 및 제2 원본 영상 프레임들은 240Hz의 프레임 주파수로 출력되는 것을 특징으로 하는 영상 데이터 처리 방법.
- 제3항에 있어서, 상기 제1 및 제2 원본 영상 프레임들은 24Hz의 프레임 주파수로 수신되고, 상기 휘도 보간 프레임이 삽입된 상기 제1 및 제2 원본 영상 프레임들은 240Hz의 프레임 주파수로 출력되는 것을 특징으로 하는 영상 데이터 처리 방법.
- 제2항에 있어서, 상기 제1 및 제2 움직임 벡터들의 가중치를 고려하여 적어도 하나의 움직임 보간 프레임을 생성하는 단계; 및
상기 제1 및 제2 원본 프레임들 사이에 상기 움직임 보간 프레임을 삽입하는 단계를 더 포함하며,
상기 인접한 두 개의 영상 프레임들은 상기 제1 원본 영상 프레임과 상기 움직임 보간 프레임, 인접한 상기 움직임 보간 프레임들, 및 상기 움직임 보간 프레임들과 상기 제2 원본 영상 프레임들 중 적어도 어느 하나인 것을 특징으로 하는 영상 데이터 처리 방법. - 제6항에 있어서, 상기 제1 및 제2 원본 영상 프레임들은 60Hz의 프레임 주파수로 수신되고, 상기 휘도 보간 프레임이 삽입된 상기 제1 및 제2 원본 영상 프레임들은 240Hz의 프레임 주파수로 출력되는 것을 특징으로 하는 영상 데이터 처리 방법.
- 제7항에 있어서, 상기 움직임 보간 프레임과 상기 휘도 보간 프레임은 1:2 또는 2:1의 비율로 삽입되는 것을 특징으로 하는 영상 데이터 처리 방법.
- 제6항에 있어서, 상기 제1 및 제2 원본 영상 프레임들의 데이터는 24Hz의 프레임 주파수로 수신되고, 상기 휘도 보간 프레임이 삽입된 상기 제1 및 제2 원본 영상 프레임들은 240Hz의 프레임 주파수로 출력되는 것을 특징으로 하는 영상 데이터 처리 방법.
- 제9항에 있어서, 상기 움직임 보간 프레임과 상기 휘도 보간 프레임은 4:5의 비율로 삽입되는 것을 특징으로 하는 영상 데이터 처리 방법.
- 영상을 표시하는 표시 패널;
제1 원본 영상 프레임과 상기 제1 원본 영상 프레임과 다른 제2 원본 영상 프레임들의 데이터를 움직임 추정하여 산출된 제1 및 제2 움직임 벡터들을 이용하여 샘플 프레임을 생성하고, 상기 제1 원본 영상 프레임과 상기 샘플 프레임의 비교 결과에 따라 인접한 두 개의 영상 프레임들의 평균 휘도값을 갖는 적어도 하나의 휘도 보간 프레임을 생성하며, 상기 제1 및 제2 원본 영상 프레임들 사이에 상기 휘도 보간 프레임을 삽입하여 출력하는 데이터 처리부; 및
상기 데이터 처리부에서 출력되는 프레임들의 데이터를 상기 표시 패널에 출력하는 패널 구동부를 포함하는 표시 장치. - 제11항에 있어서, 상기 데이터 처리부는
상기 제1 및 제2 움직임 벡터들을 산출하는 움직임 추정부;
상기 샘플 프레임 및 상기 휘도 보간 프레임을 생성하는 움직임 보간부; 및
상기 제1 및 제2 원본 영상 프레임들 사이에 상기 휘도 보간 프레임을 삽입하여 출력하는 출력부를 포함하는 것을 특징으로 하는 표시장치. - 제12항에 있어서, 상기 인접한 두 개의 영상 프레임들은 상기 제1 및 제2 원본 영상 프레임들이며,
상기 움직임 보간부는 상기 제1 원본 영상 프레임과 상기 샘플 프레임의 비교결과 움직임 추정 에러가 기 설정된 임계치를 초과하는 경우에 상기 제1 및 제2 원본 영상 프레임들을 이용하여 상기 휘도 보간 프레임을 생성하는 것을 특징으로 하는 표시 장치. - 제13항에 있어서, 상기 제1 및 제2 원본 영상 프레임들은 24Hz의 프레임 주파수로 수신되고, 상기 휘도 보간 프레임이 삽입된 상기 제1 및 제2 원본 영상 프레임들은 240Hz의 프레임 주파수로 출력되는 것을 특징으로 하는 표시 장치.
- 제13항에 있어서, 상기 제1 및 제2 원본 영상 프레임들은 60Hz의 프레임 주파수로 수신되고, 상기 휘도 보간 프레임이 삽입된 상기 제1 및 제2 원본 영상 프레임들은 240Hz의 프레임 주파수로 출력되는 것을 특징으로 하는 표시 장치.
- 제12항에 있어서, 상기 움직임 보간부는 상기 제1 원본 영상 프레임과 상기 샘플 프레임의 비교결과 움직임 추정 에러가 기 설정된 임계치를 초과하는 경우에 상기 제1 및 제2 움직임 벡터들의 가중치를 고려하여 적어도 하나의 움직임 보간 프레임을 생성하고, 상기 제1 및 제2 원본 영상 프레임들 및 상기 움직임 보간 프레임을 이용하여 상기 휘도 보간 프레임을 생성하는 것을 특징으로 하는 표시 장치.
- 제16항에 있어서, 상기 제1 및 제2 원본 영상 프레임들의 데이터는 60Hz의 프레임 주파수로 수신되고, 상기 휘도 보간 프레임이 삽입된 상기 제1 및 제2 원본 영상 프레임들은 240Hz의 프레임 주파수로 출력되는 것을 특징으로 하는 표시 장치.
- 제17항에 있어서, 상기 움직임 보간 프레임과 상기 휘도 보간 프레임은 1:2 또는 2:1의 비율로 삽입되는 것을 특징으로 하는 표시 장치.
- 제16항에 있어서, 상기 제1 및 제2 원본 영상 프레임들은 60Hz의 프레임 주파수로 수신되고, 상기 휘도 보간 프레임이 삽입된 상기 제1 및 제2 원본 영상 프레임들은 240Hz의 프레임 주파수로 출력되는 것을 특징으로 하는 표시 장치.
- 제19항에 있어서, 상기 움직임 보간 프레임과 상기 휘도 보간 프레임은 4:5의 비율로 삽입되는 것을 특징으로 하는 표시 장치.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020100092575A KR20120030813A (ko) | 2010-09-20 | 2010-09-20 | 영상 데이터 처리 방법 및 이를 수행하는 표시 장치 |
| US13/212,816 US20120070038A1 (en) | 2010-09-20 | 2011-08-18 | Method of Processing Image Data and Display Apparatus for Performing the Same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020100092575A KR20120030813A (ko) | 2010-09-20 | 2010-09-20 | 영상 데이터 처리 방법 및 이를 수행하는 표시 장치 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20120030813A true KR20120030813A (ko) | 2012-03-29 |
Family
ID=45817807
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020100092575A KR20120030813A (ko) | 2010-09-20 | 2010-09-20 | 영상 데이터 처리 방법 및 이를 수행하는 표시 장치 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20120070038A1 (ko) |
| KR (1) | KR20120030813A (ko) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014082541A (ja) * | 2012-10-12 | 2014-05-08 | National Institute Of Information & Communication Technology | 互いに類似した情報を含む複数画像のデータサイズを低減する方法、プログラムおよび装置 |
| CN113837136B (zh) * | 2021-09-29 | 2022-12-23 | 深圳市慧鲤科技有限公司 | 视频插帧方法及装置、电子设备和存储介质 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6792043B1 (en) * | 1998-10-23 | 2004-09-14 | Telecommunications Advancement Organization Of Japan | Method, apparatus and program products for retrieving moving image |
| US7181070B2 (en) * | 2001-10-30 | 2007-02-20 | Altera Corporation | Methods and apparatus for multiple stage video decoding |
| KR20060043118A (ko) * | 2004-10-07 | 2006-05-15 | 엘지전자 주식회사 | 영상 신호의 인코딩 및 디코딩 방법 |
| KR100763179B1 (ko) * | 2005-04-01 | 2007-10-04 | 삼성전자주식회사 | 비동기 픽쳐의 모션 벡터를 압축/복원하는 방법 및 그방법을 이용한 장치 |
| US20090167958A1 (en) * | 2007-12-28 | 2009-07-02 | Ati Technologies Ulc | System and method of motion vector estimation using content associativity |
| US8913816B2 (en) * | 2009-04-06 | 2014-12-16 | Hitachi Medical Corporation | Medical image dianostic device, region-of-interest setting method, and medical image processing device |
| US8830339B2 (en) * | 2009-04-15 | 2014-09-09 | Qualcomm Incorporated | Auto-triggered fast frame rate digital video recording |
| TWI398159B (zh) * | 2009-06-29 | 2013-06-01 | Silicon Integrated Sys Corp | 具動態控制畫質功能的幀率轉換裝置及相關方法 |
-
2010
- 2010-09-20 KR KR1020100092575A patent/KR20120030813A/ko not_active Application Discontinuation
-
2011
- 2011-08-18 US US13/212,816 patent/US20120070038A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| US20120070038A1 (en) | 2012-03-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4405481B2 (ja) | 液晶表示装置 | |
| US20080106544A1 (en) | Motion detection apparatus and method applied to liquid crystal display device | |
| US9189999B2 (en) | Signal processing device, liquid crystal device, electronic apparatus and signal processing method | |
| TWI536355B (zh) | 顯示控制系統 | |
| US9491449B2 (en) | Stereoscopic image display device and driving method thereof | |
| KR20140039524A (ko) | 표시 장치의 구동 방법 및 표시 장치의 구동 장치 | |
| JP2007017863A (ja) | 液晶パネルの駆動方法および液晶表示装置 | |
| JP2011090079A (ja) | 表示装置、表示方法およびコンピュータプログラム | |
| WO2008056451A1 (fr) | Dispositif d'affichage d'image et procédé d'affichage d'image, et dispositif de traitement d'image et procédé de traitement d'image | |
| WO2010134358A1 (ja) | 画像表示装置 | |
| JP5532232B2 (ja) | 映像信号処理装置、映像表示装置および映像表示システム | |
| JPWO2015186212A1 (ja) | 液晶表示装置及び表示方法 | |
| US20100026737A1 (en) | Video Display Device | |
| US20090244330A1 (en) | Image processing apparatus and image processing method | |
| JP2008065332A (ja) | グローバル画像(globalimage)検出方法並びに、その方法を使用する表示装置及びその装置の駆動方法 | |
| US20130201226A1 (en) | Liquid Crystal Display Driving Method and Display Device Using the Same | |
| KR20120030813A (ko) | 영상 데이터 처리 방법 및 이를 수행하는 표시 장치 | |
| JP2005268912A (ja) | フレーム補間のための画像処理装置およびそれを備えた表示装置 | |
| EP2326098A2 (en) | Image displaying apparatus and image signal processing method of the same | |
| KR20070092151A (ko) | 화상 표시 장치 및 화상 표시 방법 | |
| TWI427611B (zh) | 過驅動值產生方法 | |
| US20120268562A1 (en) | Image processing module and image processing method thereof for 2d/3d images conversion and frame rate conversion | |
| JP2005173525A (ja) | 液晶表示装置、液晶表示制御方法、並びに、そのプログラムおよび記録媒体 | |
| JP2008165235A (ja) | 液晶表示装置及びその駆動方法 | |
| US20120050263A1 (en) | 3d image processing apparatus and method for processing 3d images |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| N231 | Notification of change of applicant | ||
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |