KR20110085902A - 자동 방향설정 감지장치를 구비한 기기의 조정 방법 및 자동 이미지 방향설정 장치를 구비한 기기 - Google Patents
자동 방향설정 감지장치를 구비한 기기의 조정 방법 및 자동 이미지 방향설정 장치를 구비한 기기 Download PDFInfo
- Publication number
- KR20110085902A KR20110085902A KR1020110004730A KR20110004730A KR20110085902A KR 20110085902 A KR20110085902 A KR 20110085902A KR 1020110004730 A KR1020110004730 A KR 1020110004730A KR 20110004730 A KR20110004730 A KR 20110004730A KR 20110085902 A KR20110085902 A KR 20110085902A
- Authority
- KR
- South Korea
- Prior art keywords
- offset
- acceleration
- automatic
- acceleration sensor
- measured
- Prior art date
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C1/00—Measuring angles
- G01C1/02—Theodolites
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P21/00—Testing or calibrating of apparatus or devices covered by the preceding groups
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0346—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of the device orientation or free movement in a 3D space, e.g. 3D mice, 6-DOF [six degrees of freedom] pointers using gyroscopes, accelerometers or tilt-sensors
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2200/00—Indexing scheme relating to G06F1/04 - G06F1/32
- G06F2200/16—Indexing scheme relating to G06F1/16 - G06F1/18
- G06F2200/163—Indexing scheme relating to constructional details of the computer
- G06F2200/1637—Sensing arrangement for detection of housing movement or orientation, e.g. for controlling scrolling or cursor movement on the display of an handheld computer
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Position Input By Displaying (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- User Interface Of Digital Computer (AREA)
- Telephone Function (AREA)
Abstract
본 발명은 자동 방향설정 감지장치를 구비한 기기를 조정하기 위한 방법에 관한 것이며, 방향설정 감지장치는 지면의 중력장에 대한 기기의 위치에 따라 선택되고, 이때 2개 이상의 감지 축을 갖는 센서 장치를 이용하여 지면의 중력장에 대한 기기의 위치가 검출되며, 제1 단계에서 가속도값이 측정되고, 제2 단계에서 상기 가속도값을 이용하여 오프셋이 검출되며 제3 단계에서는 오프셋에 따라 방향설정 감지장치가 최적화된다.
Description
본 발명은 청구항 제1항의 전제부에 따른 방법 및 청구항 제8항의 전제부에 따른 기기에 관한 것이다.
가속도 센서를 구비한 휴대용 디지털 기기는 일반적으로 공지되어 있다. 예컨대 이동 전화, 휴대용 비디오 기기 및 카메라는 가속도 센서를 갖추고 있다. 이러한 가속도 센서들은 지면의 중력장에 대해 이동 전화 또는 이와 유사한 휴대용 기기의 방향설정을 감지한다. 이러한 감지에 따라, 기기의 스크린 상에서 예컨대 이미지의 디스플레이 모드가 인물 모드로부터 풍경 모드로 변동한다. 방향설정 감지장치를 구비한 기기는 예컨대 공보 US 2006/0204232 A1호와 US 7138979호에 공지되어 있다.
공지된 방법에서는, 기기가 기울어짐(tilting)으로써 측정 가능한 가속도 성분이 감소하게 되고, 이미지가 인물 모드 또는 풍경 모드로 나타나야하는지의 여부에 대한 정확한 결정이 더 이상 가능하지 않다는 것이 단점이다. 기울어짐이라 함은, 하나의 주 연장 평면과 2개의 주 연장 방향을 갖거나 서로 수직인 2개의 주 연장 축을 갖는 기기의 경우, 지표면에 대해 평행하거나 중력 벡터에 대해 수직으로 연장되는 주 연장 축을 중심으로 기기가 회전하는(기울어지는) 것을 의미한다. 이러한 문제는, 사전에 규정된 한계값을 틸팅각이 초과한 경우 자동 이미지 디스플레이가 블록킹됨으로써 해결된다.
상기 한계값은 예컨대 하기의 방법들에 의해 결정될 수 있으나, 이러한 방법에는 비교적 많은 시간이 소요된다. 제1 단계에서는 가속도 센서의 측정 부정확도 또는 측정 에러 분포의 검출이 포함된다. 이를 위해서는 충분히 많은 수의 가속도 센서를 검사해야 한다. 이러한 검사는 비교적 시간이 많이 든다. 제2 단계에는 인물 모드 또는 풍경 모드가 사용되어야 하는지에 대한 정확한 결정이 더 이상 가능하지 않을 정도로 가속도 센서의 측정 에러가 매우 커지기 시작하는 틸팅각의 계산이 포함된다. 제3 단계에는 틸팅각 자체의 계산을 위한 가속도 센서의 측정 에러의 계산이 포함된다.
디스플레이 모드가 잘못 선택되지 않으면서도 많은 수의 기기들을 위한 정확한 작동이 보장될 수 있으려면, 가속도 센서의 제조 시에 발생하는 측정 부정확도의 분포에 따라, 틸팅각의 한계값이 비교적 작게 사전 결정되어야 한다. 그러나 이는, 작은 틸팅각으로 인해 상기 기기가 더 이상 디스플레이 모드를 전환하지 못하게 되는 결과를 초래한다. 이러한 문제점은, 가속도 센서의 편차가 상기 센서의 제조 이후에 측정되고 보상될 수 있음으로써 해결되므로, 틸팅각의 한계값은 비교적 큰 값으로 사전 결정될 수 있다. 물론 이러한 측정과 보상 방법은 비용이 많이 들어서, 상기 유형의 가속도 센서를 구비한 기기의 제조자는 상기의 측정 및 보상 방법을 경제적으로 유의미하게 구현할 수가 없다. 더욱이, 가속도 센서가 이동 기기 내에 장착될 때 가속도 센서의 편차는 변동할 수 있다.
본 발명에 따른 방법 및, 종속항들에 따른 본 발명의 기기는 종래 기술과 비교할 때 이하의 장점들을 갖는다. 기기를 사용할 경우, 제조 및 장착으로 인한 가속도 센서의 측정 부정확도(오프셋)는 상기 기기 내에 가속도 센서가 장착된 이후에야 최종 소비자에 의해 보상될 수 있다. 따라서 오프셋이 최적으로 결정될 수 있으므로, 측정된 가속도값이 상기 최적의 오프셋에 의해 보정될 수 있으며 보정된 가속도값의 최적의 정확도가 구현될 수 있다. 최적으로 검출된 오프셋에 의해, 장기적으로 볼 때 기기의 성능이 뚜렷이 증가할 수 있다. 또한 기기 내에 가속도 센서가 장착되기 전에 오프셋을 복잡하게 검출할 경우에 드는 비용이 생략된다. 이는 또한 기기 내에 가속도 센서가 장착되기 전에 일련의 복잡한 검사가 생략될 때 시간이 상당히 절약되는 것을 의미한다. 또한, 기기 내에 가속도 센서가 장착된 이후 오프셋을 결정하는 것은 장착에 따른 측정 부정확도의 관점에서 볼 때 장착 이전보다 실질적으로 더 정확하다. 또한, 본 발명에 따른 방법을 적용함으로써, 심한 측정 부정확도에 의거해서 비용면에서 비교적 유리한 가속도 센서를 사용하는 것이 가능한데, 그 이유는 상기 측정 부정확도 역시 본 발명에 따른 방법에 의해 보상될 수 있기 때문이다.
본 발명의 바람직한 실시예들과 개선예들은 종속항 및, 도면을 참조한 상세한 설명에 제시될 수 있다.
바람직한 개선예에 따라 지면의 중력장의 힘 방향에 대해 수직인 제1 평면과 기기의 스크린 평면 사이의 각이 계산된다. 또한 바람직하게, 상기 각이 임계값과 비교되며, 상기 각이 임계값에 미달하면 블록킹 신호가 생성된다. 또한, 블록킹 신호가 생성되었을 때 자동 이미지 방향설정이 블록킹되는 것이 바람직하다. 자동 이미지 방향설정이 블록킹됨으로써, 예컨대 인물 모드로부터 풍경 모드로 부적절하게 전환되는 것은 방지될 수 있다.
다른 바람직한 일 개선예에 따라, 임계값은 오프셋의 검출 이후 감소한다. 이러한 감소에 의해 바람직하게는, 먼저 임계값이 비교적 높게 세팅되며 오프셋의 검출 이후 최적화된다. 오프셋의 검출 이후 임계값이 감소하면, 틸팅 운동이 비교적 큰 경우에도 최적의 자동 이미지 방향설정이 여전히 가능하다.
바람직한 다른 개선예에 따라, 가속도값을 측정하기 위해 3축 가속도 센서가 사용된다. 3축 가속도 센서가 사용됨으로써, 공지된 센서 장치를 이용하는 본 발명에 따른 방법이 사용될 수 있다.
본 발명의 또 다른 대상은 자동 이미지 방향설정 장치를 구비한 기기이다. 이러한 본 발명에 따른 기기는 종래 기술과 비교할 때, 본 발명에 따른 방법이 상기 기기에 의해 적용될 수 있다는 장점을 갖는다. 기기를 사용할 경우, 제조 및 장착으로 인한 가속도 센서의 오프셋은 가속도 센서가 기기 내에 장착된 이후에야 비로소 최종 소비자에 의해 보상될 수 있다. 따라서 오프셋이 최적으로 결정될 수 있으므로, 측정된 가속도값이 상기의 최적의 오프셋에 의해 보정될 수 있으며 보정된 가속도값의 최적의 정확도가 구현될 수 있다. 최적으로 검출된 오프셋에 의해, 장기적으로 볼 때 기기의 성능이 뚜렷이 증가할 수 있다.
바람직한 일 개선예에 따라 3축 가속도 센서, 컴퓨터 유닛 및 메모리 유닛이 마이크로 전기 기계 시스템(MEMS)으로서 제조될 수 있다. MEMS가 제조됨으로써, 3축 가속도 센서, 컴퓨터 유닛 및 메모리 유닛이 최대한으로 작은 공간에 구현될 수 있다. 또한 바람직하게, 3축 가속도 센서, 컴퓨터 유닛 및 메모리 유닛은 단일의 기판 상에 제조될 수 있다. 따라서 3축 가속도 센서, 컴퓨터 유닛 및 메모리 유닛이 차지하는 공간이 바람직하게 최소화될 수 있다.
본 발명에 따르면, 기기 내에 가속도 센서가 장착된 이후에 비로소 제조 및 장착으로 인한 가속도 센서의 측정 부정확도가 보상될 수 있으므로, 오프셋이 최적으로 결정될 수 있고 이러한 오프셋에 의해 가속도값이 보정될 수 있으며 결과적으로 최적의 정확도를 얻을 수 있다.
본 발명의 실시예들이 도면에 도시되며 이하의 상세한 설명에서 더 자세히 설명된다.
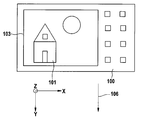
도 1은 인물 모드의 이미지를 갖는 본 발명에 따른 기기의 개략적 도면.
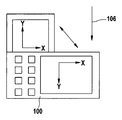
도 2는 풍경 모드의 이미지를 갖는 본 발명에 따른 기기의 제2의 개략적 도면.
도 3은 본 발명에 따른 기기의 제3의 개략적 도면.
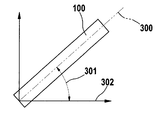
도 4는 본 발명에 따른 기기의 제4의 개략적 도면.
도 5는 본 발명에 따른 방법의 블록도.
도 6은 오프셋을 결정하기 위한 알고리즘에 대한 일 실시예의 블록 회로도.
도 7은 측정된 가속도값이 기입되어 있는 좌표계의 도면.
도 8은 보정된 가속도값이 기입되어 있는 좌표계의 도면.
도 1은 인물 모드의 이미지를 갖는 본 발명에 따른 기기의 개략적 도면.
도 2는 풍경 모드의 이미지를 갖는 본 발명에 따른 기기의 제2의 개략적 도면.
도 3은 본 발명에 따른 기기의 제3의 개략적 도면.
도 4는 본 발명에 따른 기기의 제4의 개략적 도면.
도 5는 본 발명에 따른 방법의 블록도.
도 6은 오프셋을 결정하기 위한 알고리즘에 대한 일 실시예의 블록 회로도.
도 7은 측정된 가속도값이 기입되어 있는 좌표계의 도면.
도 8은 보정된 가속도값이 기입되어 있는 좌표계의 도면.
다양한 도면들에서, 동일한 부품들에는 항상 동일한 도면 부호를 부여했으므로 각각을 통상 한 번만 지칭하거나 언급하기로 한다.
도 1에는 인물 모드의 이미지(101)를 갖는 본 발명에 따른 기기(100)가 도시되어 있다. 지면의 중력장에 대한 기기(100)의 방향설정은 기기(100)의 스크린(102)에 이미지(101)가 인물 모드 또는 풍경 모드로 디스플레이되는지의 여부를 결정한다. 직사각형 스크린(102)은 스크린 평면(300)에서 연장되며 2개의 긴 모서리(103)와 2개의 짧은 모서리(104)를 갖는다. 짧은 모서리(104)는 제1 감지 축(X)에 대해 평행하게 연장되며 긴 모서리(103)는 제1 감지 축(X)에 대해 수직인 제2 감지 축(Y)에 대해 평행하게 연장된다. 제3 감지 축(Z)은 제1 감지 축(X)에 대해 수직으로 연장되며 제2 감지 축(Y)에 대해 수직으로 연장된다. 감지 축(X, Y, Z)은 3축 가속도 센서의 감지 축에 상응한다. 스크린 평면(300)에서 제1 감지 축(X)과 제2 감지 축(Y)이 연장된다. 제3 감지 축(Z)은 스크린 평면(300)에 대해 수직으로 연장된다. 기기(100)의 하부 영역에는 키보드(105)가 표시되어 있다. 이 경우 이미지(101)는 인물 모드로 디스플레이되는데, 그 이유는 가속도 센서의 제1 감지 축(X)이 지면의 중력장의 힘 방향(106)에 대해 평행하게 연장되기 때문이다. 가속도 센서는 제1 감지 축(X)에 대해 평행하게 0이 아닌 가속도값을 측정하며, 제2 감지 축(Y) 뿐만 아니라 제3 감지 축(Z)에 대해서도 평행하게 0의 가속도값을 측정한다.
도 2에는 풍경 모드의 이미지(101)를 갖는 본 발명에 따른 기기(100)가 도시되어 있다. 이 경우 이미지(101)는 풍경 모드로 디스플레이되는데, 그 이유는 가속도 센서의 제2 감지 축(Y)이 지면의 중력장의 힘 방향(106)에 대해 평행하게 연장되기 때문이다. 가속도 센서는 제2 감지 축(Y)에 대해 평행하게 O이 아닌 가속도값을 측정하며, 제1 및 제3 감지 축(X, Z)에 대해서도 평행하게 0의 가속도값을 측정한다.
도 3에는 본 발명에 따른 기기(100)가 개략적으로 도시되어 있다. 상기 도면에는 인물 모드와 풍경 모드 사이에서의 디스플레이 모드의 전환이 도시되어 있다. 인물 모드와 풍경 모드 사이의 전환에 있어서 지면의 중력장의 힘 방향(106)과 가속도 센서의 제1 축(X) 사이의 방향설정각이 중요하다. 지면의 중력장의 힘 방향(106)과 가속도 센서의 제1 축(X) 사이의 방향설정각이 45°와 90°사이의 값을 가지면, 인물 모드가 디스플레이 모드로서 선택된다. 한편, 지면의 중력장의 힘 방향(106)과 가속도 센서의 제1 축(X) 사이의 방향설정각이 0°와 45°사이의 값을 가지면, 풍경 모드가 디스플레이 모드로서 선택된다.
도 4에는 본 발명에 따른 기기(100)의 측면도가 개략적으로 도시되어 있다. 스크린 평면(300)과, 지면의 중력장의 힘 방향(106)에 대해 수직인 제1 평면(302) 사이에는 각(301)이 형성된다. 각(301)이 90°보다 작을 경우, 이로 인해 중력 가속도를 측정하기 위해 측정 가능한 신호들이 제1 및 제2 감지 축(X, Y)에 대해 평행하게 감소할 수 있다. 측정 가능한 신호들은 사인각[각(301)]으로써 감소한다. 각(301)이 충분히 작으면, 이미지가 인물 모드 또는 풍경 모드로 디스플레이되어야 하는지에 대한 정확한 결정은 더 이상 가능하지 않은데, 그 이유는 중력 가속도를 측정하기 위해 측정 가능한 어떠한 신호도 제1 및 제2 감지 축(X, Y)에 대해 평행하게 제공되지 않기 때문이다. 따라서 기기(100)가 매우 심하게 기울어질 때, 각(301)이 사전 규정된 임계값에 미달하면 자동 이미지 방향설정은 블록킹된다. 자동 이미지 방향설정이 블록킹되면, 상기 각이 임계값보다 작은 한, 인물 모드로부터 풍경 모드로의 전환 또는 풍경 모드로부터 인물 모드로의 전환은 더 이상 가능하지 않다. 상기 각이 임계값을 초과할 때에만, 자동 이미지 방향설정이 릴리스된다.
도 5에는 본 발명에 따른 방법의 블록도가 도시되어 있다. 블록(500)에서는 공간 상의 복수의 점들에서 복수의 가속도값들이 측정된다. 이러한 측정은 오프셋 계산이 가능할 때까지 실행된다. 블록(501)에서는 측정된 가속도값을 기초로 오프셋이 계산된다. 블록(502)에서는 측정된 가속도값이 계산된 오프셋에 의해 보정되므로, 보정된 가속도값이 또 다른 계산에 사용될 수 있다. 블록(503)에서는 지면의 중력장의 힘 방향(106)에 대해 수직인 제1 평면(302)과 기기(100)의 스크린 평면(300) 사이의 각(301)이 결정되도록, 보정된 가속도값이 사용된다. 블록(504)에서는 각(301)이 임계값과 비교되고, 상기 각(301)이 임계값에 미달하는지의 여부가 확인된다. 각(301)이 임계값에 미달하면, 블록(505)에서 자동 이미지 방향설정이 블록킹된다. 이와 같은 경우가 아니면 즉, 각(301)이 임계값에 미달하지 않으면, 자동 이미지 방향설정이 블록킹되지 않으며 블록(506)에서 자동 이미지 방향설정이 실행된다.
도 6에는 측정된 가속도값의 오프셋을 결정하기 위한 알고리즘에 대한 일례가 블록 회로도로서 도시되어 있다. 이러한 측정은 최종 소비자에 의한 제1 작동중 실행된다. 최종 소비자는 이동식 기기(100)와 함께 이동하므로, 복수의 공간 점들에서 가속도 센서에 의해 중력 가속도가 측정될 수 있다. 기기(100)가 정지 위치에 있을 때마다, 가속도 성분이 측정된다. 블록(600)에서는 기기(100)가 정지 위치에 있는지 또는 이동하는지의 여부가 확인된다. 기기(100)가 정지하면, 가속도값이 측정된다. 그 후, 기기(100)는 최종 소비자에 의해 이동한다. 블록(601)에서는 기기(100)가 정지 위치에 있는지 또는 이동하는지의 여부가 확인된다. 기기(100)가 정지하면, 또 다른 가속도값이 측정된다. 상기 측정은 상이한 공간 점들에서의 충분한 가속도값을 얻을 때까지 수회 실행된다. 블록(602)에서는 측정된 가속도값이 오프셋 검출을 위해 좌표계(604)에 제공된다. 마지막으로 블록(603)에서는 상기 오프셋이 계산된다.
도 7에는 오프셋의 검출이 개략적으로 도시되어 있다. 좌표계에는, 측정된 가속도값들이 X 방향, Y 방향 및 Z 방향으로 기입되어 있다. 기입된 측정점은 실질적으로 볼 형태로 중앙에 배치된다. 볼형 배치 구조의 중점은 좌표계의 원점으로부터 벗어나 있다. 이러한 편차는 검출되어야 하는 오프셋을 의미한다. 측정된 모든 가속도값이 오프셋을 이용하여 보정되면, 볼형 배치 구조가 좌표계의 원점으로 변위되고, 도 8에서 동일한 좌표계에 표시된, 보정된 가속도값이 획득된다. 중점은 좌표계의 원점에 정확히 위치한다. 이로써 오프셋의 검출이 종료된다.
100 : 기기
101 : 이미지
102 : 스크린
103, 104: 모서리
105 : 키보드
106 : 중력장의 힘 방향
300 : 스크린 평면
301 : 각
302 : 제1 평면
X : 제1 감지 축
Y : 제2 감지 축
Z : 제3 감지 축
500, 501, 502, 503, 504, 505 : 블록
600, 601, 602, 603 : 블록
604 : 좌표계
101 : 이미지
102 : 스크린
103, 104: 모서리
105 : 키보드
106 : 중력장의 힘 방향
300 : 스크린 평면
301 : 각
302 : 제1 평면
X : 제1 감지 축
Y : 제2 감지 축
Z : 제3 감지 축
500, 501, 502, 503, 504, 505 : 블록
600, 601, 602, 603 : 블록
604 : 좌표계
Claims (10)
- 자동 방향설정 감지장치를 구비한 기기를 조정하기 위한 방법이며, 방향설정 감지장치는 지면의 중력장에 대한 기기의 위치에 따라 선택되고, 이때 2개 이상의 감지 축을 갖는 센서 장치를 이용하여 지면의 중력장에 대한 기기의 위치가 검출되는, 자동 방향설정 감지장치를 구비한 기기의 조정 방법에 있어서,
제1 단계에서 가속도값이 측정되고, 제2 단계에서 상기 가속도값을 이용하여 오프셋이 검출되며, 제3 단계에서는 오프셋에 따라 방향설정 감지 장치가 최적화되는 것을 특징으로 하는, 자동 방향설정 감지장치를 구비한 기기의 조정 방법. - 제1항에 있어서, 지면의 중력장의 힘 방향(106)에 대해 수직인 제1 평면(302)과 기기(100)의 스크린 평면(300) 사이의 각(301)이 계산되는 것을 특징으로 하는, 자동 방향설정 감지장치를 구비한 기기의 조정 방법.
- 제1항 또는 제2항에 있어서, 상기 각(301)이 임계값과 비교되는 것을 특징으로 하는, 자동 방향설정 감지장치를 구비한 기기의 조정 방법.
- 제1항 또는 제2항에 있어서, 상기 각(301)이 임계값에 미달하면, 블록킹 신호가 생성되는 것을 특징으로 하는, 자동 방향설정 감지장치를 구비한 기기의 조정 방법.
- 제1항 또는 제2항에 있어서, 블록킹 신호가 생성되면, 자동 이미지 방향설정이 블록킹되는 것을 특징으로 하는, 자동 방향설정 감지장치를 구비한 기기의 조정 방법.
- 제3항에 있어서, 오프셋의 검출 이후 또 다른 임계값이 검출되며, 또 다른 임계값은 상기 임계값보다 작은 것을 특징으로 하는, 자동 방향설정 감지장치를 구비한 기기의 조정 방법.
- 제1항 또는 제2항에 있어서, 가속도값을 측정하기 위해 3축 가속도 센서가 사용되는 것을 특징으로 하는, 자동 방향설정 감지장치를 구비한 기기의 조정 방법.
- 3축 가속도 센서, 컴퓨터 유닛 및 메모리 유닛을 구비하며, 제1항 또는 제2항에 따른 방법을 실행하기 위한 자동 이미지 방향설정 장치를 구비한 기기에 있어서,
측정된 복수의 가속도값들이 복수의 점들에서 측정될 수 있으며, 측정된 복수의 가속도값들을 이용하여 오프셋이 검출될 수 있고, 측정된 하나 이상의 또 다른 가속도값이 오프셋을 이용하여 보정될 수 있으며, 보정된 가속도값이 상기 보정에 의해 검출될 수 있는 것을 특징으로 하는, 자동 이미지 방향설정 장치를 구비한 기기. - 제8항에 있어서, 3축 가속도 센서, 컴퓨터 유닛 및 메모리 유닛이 마이크로 전기 기계 시스템(MEMS)으로서 제조될 수 있는 것을 특징으로 하는, 자동 이미지 방향설정 장치를 구비한 기기.
- 제9항에 있어서, 3축 가속도 센서, 컴퓨터 유닛 및 메모리 유닛이 단일 기판 상에 제조될 수 있는 것을 특징으로 하는, 자동 이미지 방향설정 장치를 구비한 기기.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE201010001019 DE102010001019A1 (de) | 2010-01-19 | 2010-01-19 | Verfahren zur automatischen Orientierungserkennung |
| DE102010001019.7 | 2010-01-19 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20110085902A true KR20110085902A (ko) | 2011-07-27 |
| KR101829058B1 KR101829058B1 (ko) | 2018-02-13 |
Family
ID=44313822
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020110004730A KR101829058B1 (ko) | 2010-01-19 | 2011-01-18 | 자동 방향설정 감지장치를 구비한 기기의 조정 방법 및 자동 이미지 방향설정 장치를 구비한 기기 |
Country Status (4)
| Country | Link |
|---|---|
| KR (1) | KR101829058B1 (ko) |
| CN (1) | CN102183233B (ko) |
| DE (1) | DE102010001019A1 (ko) |
| TW (1) | TW201139996A (ko) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9714955B2 (en) | 2012-11-02 | 2017-07-25 | Qualcomm Incorporated | Method for aligning a mobile device surface with the coordinate system of a sensor |
| DE102014012185A1 (de) * | 2014-08-20 | 2016-02-25 | Sig Technology Ag | Bedienterminal für Verarbeitungsanlagen |
| DE202015004149U1 (de) * | 2015-06-10 | 2015-07-06 | Keba Ag | Bedienpanel einer elektronischen Steuerung |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7138979B2 (en) | 2004-08-27 | 2006-11-21 | Motorola, Inc. | Device orientation based input signal generation |
| US20060204232A1 (en) | 2005-02-01 | 2006-09-14 | Harvey Weinberg | Camera with acceleration sensor |
| KR101496467B1 (ko) * | 2008-09-12 | 2015-02-26 | 엘지전자 주식회사 | 파노라마 촬영 기능이 구비된 이동 단말기 및 그의 동작방법 |
-
2010
- 2010-01-19 DE DE201010001019 patent/DE102010001019A1/de not_active Withdrawn
-
2011
- 2011-01-17 TW TW100101620A patent/TW201139996A/zh unknown
- 2011-01-18 KR KR1020110004730A patent/KR101829058B1/ko active IP Right Grant
- 2011-01-19 CN CN201110030138.2A patent/CN102183233B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE102010001019A1 (de) | 2011-07-21 |
| CN102183233B (zh) | 2015-11-25 |
| TW201139996A (en) | 2011-11-16 |
| CN102183233A (zh) | 2011-09-14 |
| KR101829058B1 (ko) | 2018-02-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2284546B1 (en) | Method and system for testing and calibrating an accelerometer of an electronic device | |
| EP2351981B1 (en) | Physical quantity measurement device and physical quantity measurement method | |
| US20110277532A1 (en) | Method for calibrating an acceleration sensor and electronic device | |
| US8583392B2 (en) | Inertial measurement unit calibration system | |
| US8527228B2 (en) | Calibration for three dimensional motion sensor | |
| US8370097B2 (en) | Calibration techniques for an electronic compass in portable device | |
| EP1795864A1 (en) | Magnetic sensor control method, magnetic sensor controller and portable terminal device | |
| JP2012123836A (ja) | モーションセンシングプログラム及びそれを備えた電子コンパス | |
| KR102365708B1 (ko) | 기울기센서를 이용한 자이로센서의 캘리브레이션 방법 | |
| FI126012B (fi) | Menetelmä ja laite suunnan määrittämiseksi magneettikentässä | |
| CN109547650B (zh) | 一种控制图像旋转的方法及装置和电子设备 | |
| EP1715292A1 (en) | Method of compensating tilt using two-axis geomagnetic sensor and acceleration sensor, and apparatus thereof | |
| KR101116193B1 (ko) | 설정 기준점 및 수준점을 이용한 지리정보 측지데이터 관리시스템 | |
| KR101829058B1 (ko) | 자동 방향설정 감지장치를 구비한 기기의 조정 방법 및 자동 이미지 방향설정 장치를 구비한 기기 | |
| US20090204351A1 (en) | Sensor Apparatus | |
| KR100568285B1 (ko) | 틸트 보상형 전자 나침반의 복각 탐색 방법 | |
| JP7093618B2 (ja) | 測量装置 | |
| JP5070428B2 (ja) | 電子コンパス及び方位測定方法 | |
| JP4638670B2 (ja) | 方位角計測方法および方位角計測装置 | |
| EP2520903B1 (en) | Portable electronic device adapted to compensate for gyroscope bias | |
| TWI512295B (zh) | 提供對準信號的方法與裝置以及具有此裝置的可攜帶的器具 | |
| US20160245842A1 (en) | Measurement apparatus, measurement method, and measurement system | |
| KR20030074177A (ko) | 수준기 | |
| CN107941463A (zh) | 头戴设备水平缺陷检测方法及系统 | |
| JP2016211907A (ja) | 傾斜度測定方法及び装置並びに電子機器及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |