KR101482802B1 - 3 차원 이미지에 대한 팔로워 방법 - Google Patents
3 차원 이미지에 대한 팔로워 방법 Download PDFInfo
- Publication number
- KR101482802B1 KR101482802B1 KR1020097007497A KR20097007497A KR101482802B1 KR 101482802 B1 KR101482802 B1 KR 101482802B1 KR 1020097007497 A KR1020097007497 A KR 1020097007497A KR 20097007497 A KR20097007497 A KR 20097007497A KR 101482802 B1 KR101482802 B1 KR 101482802B1
- Authority
- KR
- South Korea
- Prior art keywords
- selected portion
- cursor
- delete delete
- model
- viewing
- Prior art date
Links
Images











Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating 3D models or images for computer graphics
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating 3D models or images for computer graphics
- G06T19/003—Navigation within 3D models or images
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating 3D models or images for computer graphics
- G06T19/20—Editing of 3D images, e.g. changing shapes or colours, aligning objects or positioning parts
Landscapes
- Engineering & Computer Science (AREA)
- Software Systems (AREA)
- Physics & Mathematics (AREA)
- Computer Graphics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Hardware Design (AREA)
- General Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Architecture (AREA)
- Geometry (AREA)
- Processing Or Creating Images (AREA)
- Image Generation (AREA)
- Stereoscopic And Panoramic Photography (AREA)
- User Interface Of Digital Computer (AREA)
Abstract
컴퓨터-기반 방법은, 스크린상의 3-차원 이미지의 선택된 부분이 3-차원 이미지 전체에 걸쳐서 팔로윙 되도록 한다. 일 실시형태에서, 이 방법은 이미지 내에 포함된 부분을 선택하는 단계, 그 부분의 뷰잉을 방해하는 이미지내에 포함된 임의의 장애물들을 제거하는 단계, 상기 선택된 부분으로 커서의 움직임을 제한하면서 상기 부분을 따라서 상기 커서를 이동시키는 단계, 및 상기 커서를 이동시키면서, 상기 뷰잉 스크린의 선택된 영역 내에서, 상기 커서가 상기 부분의 상기 기하학적 형상을 팔로윙할 수 있도록 상기 커서의 움직임 도중에 상기 부분의 뷰잉을 방해하는 것을 나타내는 임의의 추가적인 장애물들을 자동으로 제거하는 단계를 포함한다. 따라서, 사용자에게는, 상기 부분의 상기 기하학적 형상을 팔로윙할 경우 상기 선택된 영역 내에서 상기 부분의 방해받지 않는 뷰가 제공된다.
3-차원 컴퓨터 모델, 팔로윙, 기하학적 피쳐, 장애물
Description
발명의 배경
발명의 분야
본 발명은, 3-차원 컴퓨터 모델의 분야에 관한 것이고, 더욱 상세하게는, 사용자가 3-차원 이미지와 상호작용하게 하는 컴퓨터-기반 방법 및 소프트웨어에 관한 것이다.
관련 기술의 설명
물론, 다양한 태스크들을 수행하기 위해 3-차원 모델 또는 이미지상에서 동작하는 컴퓨터 어플리케이션에 의해 이용되는 수많은 상이한 툴들이 있다. 몇몇 어플리케이션에서, 포인터는 표면을 팔로윙 (follow) 하도록 이용될 수도 있다. 예를 들어, 공동 양수인, Seemage, Inc. 에 의해 개발된 어플리케이션에서, "토이 탑 (toy top)" 형상의 포인터 또는 커서는, 포인터가 이동하는 면에 대한 법선을 가리킨다. 이 "탑 (top)" 포인터는, 포인터의 축에 대해 직각으로 위치될 툴 (예를 들어, 절단 평면) 을 위치시키거나 또는 포인터의 축을 따라서 시점을 위치시키는데 이용될 수도 있다.
이러한 방법들은 3-차원 컴퓨터 모델 및 이미지와 상호작용하는 매우 유용한 방법이지만, 이들 어플리케이션들은, 포인트가 위치하는 부분의 뷰가 사용자가 팔 로윙하거나 또는 다른 방식으로 상호작용하기를 희망하는 부분의 정면에 위치된 어셈블리 또는 다른 부분에 의해 방해받지 않고 또는 장애받지 않는다고 가정하고 있다. 더욱 구체적으로, 전술한 방법에서, "토이 탑" 포인터가, 포인터가 위치된 선택된 부분의 전방의 다른 부분의 면과 마주치거나 또는 선택된 부분을 블로킹하는 면과 마주치는 경우, 포인터는 오리지널 선택된 부분의 뷰를 방해하는 부분 또는 어셈블리의 면으로 "점프" 하며, 오리지널 부분의 면상에는 남아있지 않는다.
또한, 파이핑 (piping) 과 같은 3-차원 대상물을 뷰잉하는 현재의 방법은 전체적인 파이핑 라인을 팔로윙하기 위한 시도로 2-차원 도면을 이용하는 것을 포함한다. 그러나, 수많은 라인들이 존재할 경우, 또는 다른 방해물들이 존재하는 곳에서, 특정 라인을 팔로윙하는 것은 더 이상 실현 가능성이 없다.
이와 약간 관련된 다른 방법은, Matsui 등에 대해 미국 특허 제5,182,775호에 개시되어 있고, 파이프 용접시에 결함을 검출하기 위해 파이프의 방사선 이미지상의 차이점 분석을 수행하는 단계를 수반한다. 그러나, 수많은 다른 차이점들 중에서, 이러한 접근 방식은 서로 상호작용하지 않고, 차이점 분석을 이용하여 결함의 픽쳐를 제공한다.
잠재적으로 관련된 다른 특허는, 미국 특허 제5,467,441호; 제5,617,114호; 제5,729,704호; 및 제5,818,455호 및 유럽 특허 명세서 EP 0 636 971 B1 을 포함한다. 예를 들어, 이들 중 미국 특허 제5,467,441호에는, 제 1 이미지가 생성되어 있는 대상물-기반 모델 데이터 구조에서의 동작 방법이 개시되어 있고, 이 대상물-기반 모델 데이터 구조는 추가된 대상물들, 교체된 대상물들, 또는 삭제된 대상물들을 갖는 제 2 이미지를 생성하기 위해 사용된다. 삭제된 대상물들을 갖는 제 2 이미지를 생성하는 경우, 대상물은 삭제되어 그와 다른 숨겨진 대상물들을 드러낼 수 있다. 미국 특허 제5,617,114호에는, 다른 툴들로 구성될 수 있는 클릭-쓰루 툴을 갖는 사용자 인터페이스에 관한 것이다. 이 툴들은, 비주얼 필터를 갖는 클릭-쓰루 버튼을 포함한다.
또한, 공통으로 양도되고, 공동-계류중인 미국 특허 출원 제10/532,305호에 대한 참조가 이루어지며, 이로써 그 내용은 완전한 형태로 실제로 참조로서 통합되어 있다. 이 특허 출원은, 새롭게 정의된 속성들이 카메라 위치의 후속적 변경 도중에 유지되도록 이 새롭게 정의된 속성들이 "고정되게 (locked)" 하는 디바이스를 개시한다. 이 디바이스는 "팔로윙 모드 (following mode)" 를 유리하게 구비하며, 이 팔로윙 모드에 의해 2 차원에서 영향을 받는 존 (zone) 이 카메라 위치가 변경될 때 고정된 대상물을 팔로윙한다.
발명의 개요
본 발명의 일 양태에 따르면, 다른 대상물, 다른 부분 또는 다른 어셈블리가 다른 방식으로 뷰잉을 방해한 경우 그리고 부분이 그 범위의 일부 또는 전체에 걸쳐서 팔로윙됨에 따라, 사용자로 하여금 선택된 부분을 완전한 형태로 대화형으로 뷰잉하거나, 또는 부분의 엘리먼트들을 뷰잉하는 능력을 갖추게 하는 방법이 제공된다. 단순히 부분을 추출하고 그 부분의 주위를 눈에 띄지 않게 하는 것은 기본적인 문제를 해결하는 적당한 해결책이 아니라는 것을 이해해야만 한다. 통상, 이러한 관점에서, 어셈블리 내의 선택된 부분 위치의 즉각적인 인식 및 재빠른 이해를 가능하게 하게 하도록, 선택된 부분과 관련된 콘텍스트 또는 배경을 제공하는 것이 필요하다. 또한, 신규의 뷰 방해 대상물에 직면할 수도 있고, 또한 부분의 추가적인 팔로윙 (further following) 을 억제하는 스크린 바운더리에 도달할 수도 있는 범위에 걸쳐서 그 부분을 팔로윙하는 시도가 특정 문제로 존재한다.
후술하는 바와 같이, 본 발명의 실시형태들은 수많은 유형의 도메인 및 플랫폼에 이용될 수 있다. 표면 3-차원 모델에 대해, 모든 유형의 모델 (예를 들어, NURBS, 다른 b-rep 정의된 표면, 다각형 모델 등) 에 대해 실시형태들이 이용될 수 있다. AEC 에서, 사용자로 하여금 예를 들어, 빌딩 내의 파이프, 도관, 에어덕트, 및 배선을 팔로윙하게 하기 위해 이 실시형태들이 이용될 수 있다. 우주공간 및 별개의 제조 어플리케이션에서, 실시형태들은 사용자로 하여금 하니스 (harness) 의 일부인 수압 (hydraulic) 또는 기압 (pneumatic) 튜브 및 도관, 케이블, 전기 배선 등을 팔로윙하게 한다. 오일 실험, 오일 개발, 및 화학물질 생산에서, 예를 들어, 오일 정제소 및 화학물질 공장과 같은 어플리케이션에 대해, 본 발명의 실시형태들은 다른 파이프, 프로세싱 유닛, 또는 다른 구성에 의해 방해를 받는 파이프의 팔로윙을 가능하게 한다.
체적 모델에 대해, 본 발명의 실시형태들은, 채광 어플리케이션 (사용자로 하여금 샤프트, 통풍구 (vent), 및 다이크 (dyke) 를 팔로윙하도록 함) 에 대해, 상술한 바와 같은 오일 실험 및 오일 분야 실험 (사용자로 하여금 드릴링 경로, 암반 층들, 및 지질 형성의 바운더리를 팔로윙하도록 함) 에서, 그리고, 의학적 어플 리케이션 (실시형태들이 사용자로 하여금, 예를 들어, 정맥, 동맥, 림프 및 수담관 (bile duct), 신경계, 및 장기 (organ) 의 표면들을 팔로윙하도록 함) 에서 이용될 수 있다.
다른 용도는, 스칼라장 또는 벡터장 (예를 들어, 유체 플로우 (fluid flow) 등) 을 이용하는 어플리케이션에서의 팔로윙 플로우이다. 한편, 다른 용도는 시퀀스, 예를 들어, 일련의 용접 포인트 또는 용접 라인을 팔로윙하는 것이다.
또한, 본 발명의 실시형태는 3-차원 모델로부터 또는 물리적 대상물로부터 파생된 모델로 이루어진 물리적 대상물과 관련하여 3-차원 모델 또는 이미지의 뷰잉을 가능하게 한다. 이는, 인시츄 (in situ) 의 직접 뷰잉 또는 원격 뷰잉을 통해서 달성될 수 있다. 또한, 실시형태는, 사용자로 하여금 물리적 대상물 및 모델을 관찰하게 하고 임의의 액션이 수행되도록 결정하게 한다. 이 특징은, 예를 들어, 소방, 화학, 및 안전 어플리케이션, 서비스 및 수리, 그리고 의학적이고 외과적 절차를 포함하는 수많은 도메인에 매우 유용하다. 간단한 예시는, 소정의 대상물 (파이프, 전자 박스, 등) 으로의 액세스를 제공하기 위해 빌딩의 외부로부터 벽 내부의 어디에 홀을 만들지, 또는 매복된 대상물로의 액세스를 제공하기 위해 어디를 파야하는지를 결정하는 단계를 포함한다.
본 발명의 일 양태에 따르면, 부분을 포함하는 3-차원 컴퓨터 모델에서 선택된 부분의 기하학적 피쳐 (geometrical feature) 를 팔로윙하는 방법이 제공되는데, 상기 모델은 컴퓨터 스크린 상에 표시되고, 상기 방법은:
3-차원 컴퓨터 모델로부터 부분을 선택하는 단계; 및
기하학적 피쳐를 따라서 선택된 부분을 팔로윙하는 단계로서, (i) 상기 선택된 부분이 팔로윙됨에 따라서 상기 선택된 부분의 뷰잉을 허용하기 위해 상기 선택된 부분의 뷰잉을 방해하는 3-차원 모델에서의 임의의 장애물들을 동시에 그리고 자동으로 제거하고, (ii) 이전에 표시되지 않았고 상기 선택된 부분이 팔로윙되고 있는 방향으로 위치된 상기 3-차원 컴퓨터 모델의 추가 부분을 표시하기 위해 상기 컴퓨터 스크린상에 상기 3-차원 컴퓨터 모델을 재위치시킴으로써 상기 피쳐가 상기 방향으로 더욱 팔로윙되게 하면서, 기하학적 피쳐를 따라서 선택된 부분을 팔로윙하는 단계를 포함한다.
바람직하게, 부분의 선택은, 3-차원 컴퓨터 모델로부터 상기 선택된 부분의 뷰잉을 방해하는 임의의 장애물들을 초기에 자동으로 제거하는 단계를 포함한다. 일 바람직한 실시형태에서, 3-차원 컴퓨터 모델로부터 부분을 선택하는 단계는 커서를 이용하여 부분을 선택하는 단계를 포함한다. 다른 바람직한 실시형태에서, 3-차원 컴퓨터 모델로부터 부분을 선택하는 단계는 디렉토리 트리 구조로부터 부분을 선택하는 단계를 포함한다. 다른 바람직한 실시형태에서, 3-차원 컴퓨터 모델로부터 부분을 선택하는 단계는, 그 부분을 포함하는 층을 제외하고 3-차원 컴퓨터 모델의 모든 층을 필터링하는 단계를 포함한다. 유리한 구현에서, 상기 부분을 팔로윙하는 단계는, 사용자에 의해 선택된 소정의 속도로 그 부분을 자동으로 팔로윙하는 단계를 포함한다.
바람직하게, 상기 선택된 부분을 팔로윙하는 단계는, 커서를 이용하여 3-차원 이미지를 표시하는 스크린상에서 선택된 부분을 팔로윙하는 단계를 포함한다.
상기 선택된 부분이 파라메트릭 곡선 모델에 의해 표현된 일 바람직한 실시 형태에서, 파라메트릭 곡선 모델을 뷰잉하는 시점은 곡선 모델의 접선에 대해 수직인 뷰잉 평면 내에 제공된다. 유리하게, 새로운 접선은 곡선 모델의 기하학적 형상에서 각각의 변화에 대해 확립되었다.
다른 바람직한 실시형태에서, 선택된 부분의 선택된 표면에 대한 수직인 평면이 컴퓨팅되고, 3-차원 컴퓨터 모델에서 그 선택된 부분이 뷰잉된 시점은 수직 평면에 대해 정의된다.
바람직하게, 선택된 부분을 팔로윙하는 단계는 커서의 움직임을 선택된 부분으로 제한하면서 선택된 부분을 따라서 커서를 이동시키는 단계를 포함한다. 유리하게, 커서의 움직임을 선택된 부분으로 제한할 때, 커서의 움직임의 구성요소가 선택된 부분의 한계 내에 있는 한, 커서를 제어하기 위한 입력 디바이스의 움직임은 커서의 움직임을 일으킨다.
일 바람직한 실시형태에서, 선택된 부분은 서브-부분의 어셈블리를 포함한다. 유리하게, 일 구현에서, 서브-부분들의 어셈블리는 병합 동작을 통해서 정의된다. 다른 유리한 구현에서, 서브-부분들의 어셈블리는 서브-부분들의 공통 특성에 기초한다. 다른 바람직한 실시형태에서, 선택된 부분 공급부는 단일 별개의 부분을 포함한다.
3-차원 컴퓨터 모델이 체적 모델을 포함하는 바람직한 실시형태에서, 선택된 부분은 커서를 이용하여 팔로윙되고, 커서의 움직임은 스칼라장, 벡터장 및 텐서장 (tensorial field) 중 하나의 장 내의 값들을 이용하여 선택된 부분으로 제한된다.
유리한 구현에서, 선택된 부분을 팔로윙하는 것과 관련하여 오디오 출력이 이용된다. 일 바람직한 실시형태에서, 선택된 부분을 팔로윙하는데 커서가 이용되고, 오디오 출력은 커서가 선택된 부분을 팔로윙하는 한 생성되는 연속적인 톤 (tone) 을 포함한다.
오디오 출력이 이용된 다른 구현에서, 그 부분을 팔로윙하는데 선택된 부분으로 제한된 커서가 이용되고, 여기서, 선택된 부분이 팔로윙되지 않을 때에 대한 표시를 제공하기 위해 오디오 출력이 이용된다. 바람직하게, 오디오 출력은 선택된 부분이 팔로윙되지 않을 때 생성되는 가청 경보 (audible alert) 를 포함한다.
더욱 바람직한 실시형태에서, 오디오 출력은 선택된 부분의 팔로윙 단계 도중에 직면되는 부적합 (incongruity) 에 응답하여 생성되는 가청 경보를 포함한다.
일 바람직한 구현에서, 선택된 부분의 기하학적 피쳐를 나타내는데 일련의 포인트들이 이용된다. 후술하는 바와 같이, 이러한 구현은 일련의 용접 포인트 등을 팔로윙하는 것과 관련하여 유용하다.
바람직하게, 사용자에게 제공되는 3-차원 컴퓨터 모델의 시점의 방위는, 뷰의 방향과 일치하는 라인 및 기하학적 피쳐의 접선 사이에 정의된 각도가 일정하게 유지되도록 변화된다.
기하학적 피쳐는 선택된 부분의 일 표면인 바람직한 실시형태에서, 뷰의 방향과 일치하는 라인 및 그 표면에 대한 법선 사이의 각도는 일정하게 유지되도록 변화된다.
바람직하게, 선택된 부분의 연속성에 변화가 있는 경우, 3-차원 컴퓨터 모델 은 연속성의 변화 이전의 방위로부터 새로운 방위로 즉각 이동된다. 상기 연속성에서의 변화가 발생할 때, 사용자에게 경보가 제공되는 것이 바람직하다.
다른 바람직한 실시형태에서, 선택된 부분을 팔로윙하는데 3-차원 컴퓨터 모델이 뷰잉된 뷰포트 내에서 이동하는 커서가 이용되고, 이 커서가 뷰포트의 바운더리에 있는 포인트로 이동할 때, 그 뷰포트는 커서가 선택된 부분을 계속해서 팔로윙하도록 전환된다.
유리한 실시형태에서, 선택된 부분과 관련하여 이루어진 계산에 기초한 정보는 사용자에게 또한 제공된다. 이 특징은 이하 더욱 상세하게 설명된다.
본 발명의 다른 양태에 따르면, 스크린상의 3-차원 이미지의 선택된 부분이 3-차원 이미지 전체에 걸쳐서 팔로윙되게 하는 컴퓨터-기반 방법이 제공되는데, 이 방법은: 뷰잉 스크린상의 3-차원 이미지에 포함된 부분을 선택하는 단계; 상기 선택된 부분의 뷰잉을 방해하는 3-차원 이미지에 포함된 임의의 장애물들을 제거하는 단계; 커서의 움직임을 상기 선택된 부분으로 제한하면서 선택된 부분을 따라서 커서를 이동시키는 단계; 및 상기 커서가 상기 선택된 부분의 기하학적 형상을 팔로윙할 수 있고 이로써 상기 부분의 상기 기하학적 형상을 팔로윙할 때 상기 커서의 상기 이동 도중에 상기 스크린의 선택된 영역에서의 상기 선택된 부분의 방해받지 않은 뷰를 사용자에게 제공할 수 있도록, 커서가 이동하면서 스크린의 선택된 영역에서, 상기 부분을 따르는 상기 커서의 이동 도중에 상기 부분의 뷰잉을 방해하는 부분의 정면에 나타나는 임의의 추가적인 장애물들을 자동으로 제거하는 단계를 포함한다.
일 바람직한 실시형태에서, 선택된 영역은 3-차원 이미지의 일 부분에 포함 하는 스크린의 선택된 일부를 포함한다. 이와 다르게, 선택된 영역은 스크린의 전체를 포함한다.
일 바람직한 실시형태에서, 선택된 부분은 트리 구조를 이용하여 선택된다. 다른 바람직한 실시형태에서, 선택된 부분은 그 부분과 관련된 식별자를 이용하여 필터링함으로써 선택된다. 일 구현에서, 이 식별자는 선택된 부분의 명칭을 포함한다. 대신, 식별자는 선택된 부분의 특성을 포함한다.
바람직하게, 자동으로 제거하는 단계에서, 제거된 장애물들은 스크린으로부터 완전하게 제거된다. 대안의 바람직한 실시형태에서, 자동으로 제거하는 단계에서, 제거된 장애물은 스크린상에서 고스트 이미지로서 남아있다.
바람직하게, 선택된 영역은 그 부분의 기하학적 피쳐로의 커서의 프로젝션 (projection) 를 팔로윙한다. 바람직한 구현에서, 기하학적 피쳐는 표면의 만곡부, 에지 및 버텍스 중 하나를 포함한다.
바람직한 실시형태에서, 선택된 영역은 선택된 부분의 곡선형 기하학적 피쳐 상에 나타나는 선택 라인의 가장 가까운 포인트에 중심을 둔 원 (circle) 을 포함한다.
일 바람직한 실시형태에서, 사용자는 3-차원 이미지를 뷰잉할 때 정적 시점을 구비한다. 다른 바람직한 실시형태에서, 3-차원 이미지를 뷰잉할 때 사용자는 커서에 항상 중심을 둔 시점을 구비한다. 다른 대안의 바람직한 실시형태에서, 3-차원 이미지를 뷰잉할 때 사용자는 커서가 뷰잉 영역의 바운더리에 가깝게 접근할 경우 변화하는 시점을 구비한다.
앞서 나타난 바와 같이, 선택된 부분은 복수의 서브-부분들을 포함할 수도 있고, 즉, 단일의 분리된 부분 이외의 서브어셈블리 부분들일 수도 있다.
본 발명의 추가적인 양태에 따르면, 키보드를 포함하는 컴퓨터 디바이스의 뷰잉 스크린상에 표시되는 3-차원 컴퓨터 모델에서, 선택된 부분의 기하학적 피쳐를 팔로윙하는 방법이 제공되고, 상기 방법은:
상기 키보드의 제 1 키를 누르는데 응답하여 선택될 부분의 뷰잉을 방해하는 상기 3-차원 컴퓨터 모델에서의 임의의 장애물들을 제거함으로써 선택될 부분에 액세스하는 단계;
제 2 키를 이용하여 상기 부분을 선택하는 단계;
상기 선택된 부분의 기하학적 피쳐에 따라서 커서를 이동시켜 상기 기하학적 피쳐를 팔로윙하는 단계; 및
상기 커서가 상기 부분의 상기 기하학적 피쳐를 팔로윙할 수 있고 이로써 상기 커서의 상기 이동 도중에 상기 선택된 부분의 방해받지 않은 뷰를 사용자에게 제공할 수 있도록, 상기 커서를 이동하면서, 상기 부분을 따르는 상기 커서의 이동 도중에 상기 부분의 뷰잉을 방해하는 상기 부분의 정면에 나타나는 임의의 추가적인 장애물을 자동으로 제거하는 단계를 포함하고,
여기서, 상기 커서가 이동됨에 따라서, 이전에는 표시되지 않았던 커서 움직임의 방향에 위치된 상기 3-차원 컴퓨터 모델의 추가 부분을 표시하기 위해 상기 스크린상에 표시되는 상기 3-차원 컴퓨터 모델의 뷰가 변화된다.
바람직하게, 기하학적 피쳐를 팔로윙할 때 커서가 뷰잉 스크린의 바운더리로 이동될 경우, 뷰가 변화되고, 3-차원 컴퓨터 모델의 추가 부분이 이전에 커서 움직임의 방향의 바운더리 외부에 이전에 있었던 모델의 부분이 되도록, 뷰잉 스크린상에 제공되는 3-차원 컴퓨터 모델의 뷰가 이동된다.
유리하게, 커서가 바운더리로 이동될 때마다 뷰가 변화되고, 스크린상의 커서의 위치가 스크린의 중심 영역으로 복귀되도록, 스크린상에 표시된 3-차원 컴퓨터 모델의 뷰 및 스크린상의 커서 위치가 이동되며, 그에 따라, 기하학적 피쳐를 팔로윙할 때 커서의 추가적인 움직임 (further movement) 이 상기 중심 영역으로부터 계속된다.
바람직하게, 상기 추가적인 장애물들을 제거하는 단계는 장애물들을 통해서 그 부분의 뷰잉을 가능하게 하도록 고스트 라인 (ghost line) 들로 장애물을 나타내는 단계를 포함한다.
본 발명의 다른 특징 및 이점은 후술하는 바람직한 실시형태들의 상세한 설명에서 설명되고, 이들로부터 명백할 것이다.
도면의 간단한 설명
도 1 은, 본 발명의 일 바람직한 실시형태와 관련된 팔로워 방법의 플로우차트이다.
도 2(a) 및 도 2(b) 는, 팔로워 동작의 양태들을 설명하는데 이용된, 뷰포트 및 선택된 부분의 매우 개략적인 정면 입면도들이다.
도 3(a) 및 도 3(b) 는, 팔로워 동작의 추가적인 양태들을 설명하는데 이용된, 도 2(a) 및 도 2(b) 의 도면들과 유사한 매우 개략적인 정면 입면도들이다.
도 4 는, 팔로워 동작의 추가적인 양태의 설명에 이용된 매우 개략적인 평면도이다.
도 5 는, 추가적인 동작 특성을 설명하는데 이용된 매우 개략적인 사시도이다.
도 6a, 도 6b 및 도 6c 는, 추가적인 동작 양태들을 설명하는 매우 개략적인 사시도들이다.
도 7a, 도 7b 및 도 7c 는, 팔로워 방법의 3 개의 상이한 구현 또는 실시형태들의 설명에 이용된 매우 개략적인 사시도들이다.
도 8 은, 본 발명의 추가적인 바람직한 실시형태와 관련된 팔로워 방법의 플로우차트이다.
바람직한 실시형태들의 상세한 설명
전술한 바와 같이, 본 발명의 중요한 양태에 따르면, 선택된 부분 또는 어셈블리가 3-차원 이미지 또는 컴퓨터 모델에 걸쳐서 팔로윙되게 하는 컴퓨터-기반 방법이 제공된다. 초기 단계로서, 사용자는 팔로윙 또는 뷰잉될 소정의 부분을 선택한다. 바람직한 실시형태들에서, 소정의 부분의 뷰잉을 가능하게 하기 위해, 이 방법은 이 부분의 직접적인 뷰잉을 방해하는 다른 대상물, 다른 층, 또는 다른 장애물 또는 다른 방해물을 자동으로 제거하기 위해 제공된다. 예를 들어, 팔로윙될 부분이 빌딩 내에 있는 또는 빌딩의 일부 내에 있는 특정 배선 도관, 파이프 또는 덕트인 경우, 이 방법은 사용자의 관점으로부터 사용자의 시점으로부터 뷰잉되는 것과 같은 이미지로부터 모든 대상물, 예를 들어, 벽, 단열재 등을 제 거하기 위해 제공된다. 이는, 사용자의 초기 뷰잉을 가능하게 하고, 직접적으로 선택된 부분을 3-차원 표현으로 팔로윙하게 한다. 부분을 팔로윙하는데 있어서, 선택된 부분의 뷰잉에 대한 다른 대상물 및 장애물은 부분이 팔로윙됨에 따라서 자동으로 제거된다. 바람직한 실시형태에서, 부분을 뷰잉하는 것을 위한 장애물 또는 방해물의 제거는, 선택된 부분상으로의 선택된 관점 또는 시점의 프로젝션에 의해 정의되는 중심 포인트 주변 영역으로 제한된다. 또한, 앞서 나타난 바와 같이, 이 방법은 개별적인 부분들의 어셈블리를 팔로윙하도록 이용될 수도 있다. 이 방법은, 독립형 툴 또는 모드로서, 또는, 다른 모델링 툴 어플리케이션과 관련된 비배타적인 모드로서 구현될 수도 있고, 여기서, 어플리케이션에 의해 제공되는 항해 툴 (navigational tool) 은 이 방법에 의해 제약된다.
도 1 을 참조하면, 본 발명의 일 바람직한 실시형태에 따른 방법의 블록도 플로우 차트가 도시되어 있다. 도 1 에 도시된 단계들이 생략 또는 변경되거나 상이한 단계들이 이용되는, 본 발명의 방법의 상이한 바람직한 실시형태들 및 구현들이 이하 설명된다. 설명된 방법에서, 구성, 대상물 또는 다른 어셈블리의 3-차원 이미지 또는 모델이 스크린상에서 사용자에 의해 뷰잉되면, 전술된 바와 같이, 수많은 상이한 분야의 수많은 상이한 이미지 또는 모델이 사용될 수 있다.
도 1 에 도시된 바와 같이, 제 1 단계 (10) 에서, 사용자는, 사용자가 3-차원 이미지에 걸쳐서 팔로윙하는 것을 희망하는 3-차원 이미지의 루트, 코스, 또는 범위 내의 특정한 소정 부분, 또는 부분들의 어셈블리를 선택한다. 사용자는 몇몇 상이한 기술들 중 하나의 기술을 이용함으로써 그 소정의 부분을 선택할 수도 있다. 예를 들어, 일 실시형태에서, 사용자는 뷰잉 스크린상에 제공된 커서 또는 다른 선택 아이콘을 통해 소정 부분을 선택함으로써 소정의 부분을 수동으로 대화식으로 선택한다. 또한, 사용자는 메뉴 또는 디렉토리 트리 구조를 이용함으로써 그 소정의 부분을 선택할 수도 있다. 이 실시형태에서, 디렉토리 트리 구조에 포함되고, 스크린상의 3-차원 이미지의 부분들과 상호 관련된 관련 식별자가, 이미지에 포함된 각각의 부분 또는 부분들의 어셈블리에 제공된다. 소정의 부분을 선택하는데 있어서, 사용자는 디렉토리 트리로부터 소정의 부분 또는 어셈블리와 관련된 식별자를 선택한다. 다른 실시형태에서, 사용자는 원하지 않는 부분을 필터링함으로써 소정의 부분을 선택한다. 예를 들어, 디렉토리 트리를 이용함으로써, 사용자는, 사용자가 팔로윙을 원하지 않는 3-차원 이미지 내에 포함된 부분들, 부분들의 카테고리, 또는 다른 어셈블리들을 제거하도록 필터 특성을 선택할 수도 있다. 전술한 바와 같이, 표면 3D 모델에서, 단일의 개별적인 부분을 선택하는 것 대신에, 사용자로 하여금 부분들의 어셈블리를 선택하게 하는 추가적인 옵션이 있으며, 즉, 선택된 "부분" 이 사실상 서브-부분들의 어셈블리일 수도 있다. 이러한 어셈블리는, 선택의 공통적인 특성의 이점에 의해 또는 다른 방법을 이용함으로써 병합 동작을 통해서 정의될 수 있다.
블록 또는 단계 (12) 로 나타난 바와 같이, 바람직한 실시형태에서, 소정의 부분이 선택될 때 초기 단계에서 다른 부분은 자동으로 제거된다. 제거되는 부분은 완전하게 사라질 수도 있고, 또는, 사용자가 선택된 부분의 방해받지 않은 뷰를 갖지만, 콘텍스트 내의, 즉, 인접하는 부분 또는 주변부에 관련하여, 선택된 부분을 또한 뷰잉할 수 있도록 고스트 형태로 스크린상에 남아있을 수도 있다. 또한, 제거된 부분이 스크린의 선택된 영역 내에서 선택된 부분의 정면에 있는 부분들만일 수도 있고, 또는, 스크린상의 모든 부분들일 수도 있다. 따라서, 전자의 경우에, 사용자는 선택된 부분의 정면에 있는 이미지의 영역의 크기를 선택할 수도 있는데, 선택된 부분의 대응 영역을 뷰잉할 수 있도록 선택된 부분의 정면에서 장애물 또는 방해물이 제거된다.
사용자가 팔로윙될 부분을 선택하면, 본 발명의 일 바람직한 실시형태에서, 사용자는 모델이 스크린상에서 뷰잉되고 나타나는 시점 또는 관점을 선택할 수도 있다. 바람직하게는, 몇몇 상이한 모드 또는 옵션이 사용자에게 이용가능할 수도 있다. 예를 들어, 일 모드에서는, 시점은 자동으로 변화되지 않는다. 다른 모드에서는, 커서가 이용되고, 시점은 항상 커서에 중심이 맞춰져 있다. 커서를 이용하는 다른 모드에서, 시점은 커서가 제공되고 있는 현재 뷰의 바운더리에 가까이 접근할 때 변화된다.
도 1 의 실시형태에서, 사용자는 그 부분을 따라서 커서를 이동시킴으로써 수동으로 그 부분을 팔로윙한다. 다른 실시형태에서는, 자동 팔로윙 옵션이 제공된다. 자동 팔로윙 옵션을 선택함으로써, 사용자는 선택된 관점 또는 시점으로부터 이미지 또는 애니메이션을 뷰잉하고, 그 부분은 3-차원 이미지에 걸쳐서 자동으로 팔로윙된다. 이 실시형태에서, 사용자로 하여금 팔로윙 속도를 제어하고, 프로세스를 중지시키는 것 등을 가능하게 하는 제어가 제공되는 것이 바람직하다. 더욱 상세하게 후술하는 바와 같이, 수동 (커서) 옵션이 선택되는 경우, 커서의 움직임이 팔로윙될 선택된 부분으로 제한되는 것이 바람직하다.
전술한 바와 같이, 바람직한 실시형태에서, 제 1 단계에서 3-차원 이미지 내의 선택된 부분의 뷰를 방해하는 임의의 장애물들이 자동으로 제거된다. 일 구현에서, 사용자에 의해 초기에 선택된 관점 또는 시점로부터 결정되는 바와 같이, 선택된 부분에 이르기까지 임의의 뷰를 방해하는 장애물 또는 대상물이 제거된다. 뷰잉 영역은 관심 부분의 기하학적 형상, 즉, 표면, 만곡, 에지 또는 버텍스로 커서 또는 다른 표시자의 프로젝션을 팔로윙할 수도 있다. 예를 들어, 만곡에 대해, 선택된 뷰잉 영역은 만곡 상의 피킹 (picking) 라인에 가장 가까운 포인트에 중심을 둔 원일 수도 있다.
소정의 부분이 선택된 후, 단계 (14) 로 표시된 다음 단계에서, 사용자는 3-차원 이미지 또는 모델에 걸쳐서 그 부분을 팔로윙하도록, 선택된 부분을 따라서, 커서, 포인터, 또는 몇몇 다른 아이콘 (이하, 커서로 지칭됨) 을 이동시킨다. 앞서 나타난 바와 같이, 제공된 뷰잉 영역 또는 뷰포트는 스크린의 일 섹션 또는 전체 스크린을 포함할 수도 있다.
단계 (16) 에 도시된 바와 같이, 단계 (14) 에 표시된 커서의 움직임 도중에 3-차원 이미지 내의 다른 장애물들이 선택된 부분의 뷰잉을 차단하거나, 또는, 사용자가 선택된 부분을 따라서 커서를 이동시킴에 따라 다른 방식으로 선택된 부분의 뷰잉을 방해하는 경우, 선택된 부분의 뷰를 방해하는 장애물들은 자동으로 제거된다. 이는, 커서가 선택된 부분을 따라서 이동되기 때문에 사용자로 하여금 선택된 부분을 뷰잉할 수 있게 한다. 앞서 나타난 바와 같이, 일 바람직한 실 시형태에서, "제거된" 장애물들은 여전히 고스트 형태로 나타날 수도 있다.
또한, 블록 (16) 으로 나타난 바와 같이, 스크린 이미지 디스플레이는, 커서 움직임의 방향에 위치되고 이전에 표시되지 않았던 모델의 추가 부분을 표시하도록 재위치되어, 커서로 하여금 초기 스크린 디스플레이 이상의 이미지를 팔로윙하게 한다. 이러한 특징 및 추가적인 양태가 도 8 과 관련하여 이하 더욱 상세하게 설명된다.
다양한 공지된 방법이, 선택된 부품의 뷰잉을 차단하는 장애물들을 제거하거나 또는 삭제하는데 이용될 수도 있다. 예를 들어, 일 방법은, z-버퍼, 즉, 깊이 z 의 버퍼 메모리로 일반적으로 지칭되는 것을 이용함으로써 선택된 부분을 둘러싸는 영역에서의 픽셀의 깊이를 테스팅하는 것에 관심을 둔다. z-버퍼 기술의 이용은 2-차원의 이미지 차원을 갖는 메모리 수용력의 이용을 통해서, 숨겨져 있을 때 선택된 부분을 나타내는 것을 허용한다. 따라서, 3-D 이미지상에서, 테스팅되는 픽셀은, 메모리 내의 이전 z 값 (깊이 값) 이 테스팅된 픽셀의 현재 z 값보다 큰 경우에만 대체된다. 이러한 절차는 통상 깊이 테스트로서 지칭된다.
도 1 에 도시된 바람직한 실시형태의 단계 (14) 로 돌아와서, 이 실시형태에서 나타난 바와 같이, 커서가 선택된 부분으로 제한되고, 즉, 스크린상의 커서의 움직임이 선택된 부분 내에서만 이동하고 선택된 부분을 따라서만 이동하도록 제한되고, 제어 디바이스 (마우스) 가 선택된 부분의 벗어남 (movement off) 을 제공할 때 커서는 사라지거나 또는 이동될 수 없다. 따라서, 바람직한 구현에서, 사용자가 커서를 이동시킬 때, 커서는 팔로윙될 소정의 부분을 따라서만 이동할 수 있고 소정의 부분 내에서만 이동할 수 있다. 예를 들어, 파이프를 팔로윙하는데 있어서, 커서가 파이프의 중간의 파이프 상에 위치되는 경우, 커서의 움직임은 파이프로 제한되고, 따라서, 커서는 파이프 말단에서 우측 또는 좌측, 그리고 파이프 직경의 반 (half) 이상 또는 그 이하로 이동시킬 수 있을 것이다. 또한, 바람직한 실시형태에서, 선택된 부분을 팔로윙하는데 있어서, 입력 디바이스의 움직임의 구성요소가 파이프의 제한 내에서 커서의 움직임을 생성하는 한 (즉, 오직 이런 상황일 때만), 관련 입력 또는 제어 디바이스 (예를 들어, 마우스) 의 움직임은 커서의 위치에 적용될 것이고, 즉, 이러한 커서 움직임이 파이프의 범위 외부에 있는 경우에 마우스의 움직임이 커서의 움직임을 초래하지 않을 것이다.
다른 바람직한 실시형태에 따르면, 커서가 선택된 부분을 따라서 이동될 때 계속해서 소리를 내고, 부분이 더 이상 팔로윙되지 않을 때 그 소리가 중지되는, 오디오 출력이 제공된다. 커서가 선택된 부분에 직접적으로 제한되지 않을 경우, 또는, 이러한 제한과 조합되어, 피쳐가 이용될 수 있다. 즉, 일 바람직한 실시형태에서, 커서가 선택된 부분에서 벗어났음을 사용자에게 경고함으로써 커서의 움직임을 제한하기 위해 오디오 출력이 이용된다. 이에 대해, 커서가 그 부분을 벗어나는 경우, 간단한 오디오 경보가 제공될 수 있다. 다른 구현에서, 커서가 불연속성에 직면하거나 또는 원하지 않는 조건이 발생될 때마다 오디오 경보가 제공된다.
몇몇 예시에서, 일련의 포인트는 그 부분의 기하학적 형상을 설명하는데 충분한 것으로 파악될 것이다. 예를 들어, 비히클 (vehicle) 상의 기준 포인트들 에 대해 그리고 절차에 대한 경로에 대해, 선택된 부분들 사이의 용접 포인트들에 있어서, 일련의 포인트들은 충분할 수도 있다.
팔로윙될 부분이 작은 크로스 섹션 (예를 들어, 부분이 배선, 정맥, 또는 다른 기다란 형상임) 을 갖는 경우, 이 기하학적 형상은 파라미터 곡선 모델 (x=f(t), y=f(t), z=f(t) 로 나타난 것과 같이) 로 정의될 수도 있다. 이러한 경우, 하나의 유리한 실시형태에 따라서, 뷰잉 평면을 결정하기 위해, 곡선 모델에 대한 접선이 결정되고, 뷰잉 평면은 접선에 직교하는 평면으로서 정의된다. 따라서, 사용자의 시점은 그 뷰잉 평면 내에 포함될 것이다.
선택된 부분, 예를 들어, 파이프가 충분히 큰 경우에, 사용자의 시점으로부터 선택된 파이프 부분의 표면에 대한 법선은 직접 컴퓨팅될 수 있다. 따라서, 선택된 부분이 표현될 수 있는 다수의 상이한 방법이 있고, 사용자의 시점이 결정될 수 있는 다수의 상이한 방법이 있다.
부분이 곡선 모델을 이용하여 정의되는 바람직한 실시형태에서, 컴퓨터 모델의 방위는, 뷰 또는 시점과 곡면에 대한 접선 사이에 일정한 각도가 유지되는 방식으로 이동한다. 바람직하게, 팔로윙될 선택된 부분의 기하학적 형상이 표면인 경우, 시점과 그 면에 대한 법선 사이의 각도가 유지된다. 한편, 선택된 부분의 기하학적 형상이 간단하게 포인트인 경우, 그 뷰는 자동으로 변화하지 않는다.
사용자에 제공된 뷰의 위치 및 방위의 변화에 대한 예를 고려하고, 파이프의 일례를 다시 참조하여, 파이프가 뷰잉되는 것과 같이 좌측으로 팔로윙되는 경우와 파이프가 사용자로부터 90 도로 구부려져 있거나 또는 90 도로 회전되어 있는 경우 를 고려하면, 커서가 구부려져 있는 부분 주위에서 이동함에 따라서 모델은 우측으로 회전할 것이고, 90 도 회전이 완성된 이후에 회전은 중지할 것이다.
또한, 불연속성에 직면될 때 시점이 조절된다. 예를 들어, 도관이나 또는 파이프에서 90 도 회전이 나타날 때, 모델의 방위가 현재의 방위에서 새로운 방위로 급격한 움직임이 있을 것이다. 일 바람직한 실시형태에서, 결정이 필요하다고 사용자에게 경보하여, 이에 따라 적절한 결정을 내릴 때 사용자를 도와주도록 스크린상의 경보 또는 오디오 신호에 의해 사용자는 불연속성에 대한 경보를 받는다.
바람직한 구현에서, 팔로윙되는 부분이 복수의 부분 또는 경로로 분할되거나 또는 세분되는 (예를 들어, 배선 케이블이 3 개의 상이한 더 작은 케이블들로 세분되는) 불연속성이 발생하면, 가능한 선택들을 갖는 파이 차트가 사용자로 하여금 어떤 부분이나 경로를 팔로윙해야 하는지 결정하는 것을 가능하게 하기 위해 불연속성에 걸쳐 겹쳐질 수도 있다.
앞서 나타난 바와 같이, 바람직한 실시형태에서, 커서가 뷰잉 영역의 바운더리 에지에 있는 포인트로 접근할 때, 표현된 뷰잉 영역은 이미지 또는 모델의 다음 인접하는 일부를 뷰잉하도록 자동으로 조절될 것이다. 따라서, 도 2(a) 및 도 2(b) 를 참조하여, 팔로윙될 만곡 부분 (20) 은 뷰잉 영역 또는 뷰포트 (22) 의 외부에서 점선으로 도 2(a) 에 도시되고, 뷰포트 (22) 내에서는 실선으로 도시된다. 도 2(b) 에 도시된 바와 같이, 뷰포트 (22) 는 부분이 팔로윙됨에 따라서 만곡 부분 (20) 을 따라서 좌측으로 옮겨질 것이다. 만곡 부분 (20) 을 따른 뷰포트 의 새로운 ("n") 위치는 22' 로 표시된다. 따라서, 이들 실시형태에서, 커서가 뷰포트의 좌측 바운더리에 있는 포인트로 접근하거나 가까이감에 따라서 관점 또는 시점은 좌측으로 옮겨진다.
표시된 바와 같이, 뷰포트 (22) 의 유사한 이동이 상이한 부분 (24), 즉, 상이한 만곡의 부분에 대해 도 3(a) 에 나타나 있고, 유사한 부분 (26) 에 대해 수직인 뷰를 갖는 상기 유사한 부분 (26) 에 대해 도 3(b) 에 나타나 있다.
도 4 는, 선택된 부분 (30) 의 2 개의 상이한 부분의 뷰잉을 가능하게 하도록 선택된 부분 (30) 을 따라서 (좌측에 있는) 제 1 위치 및 새로운 "n" 위치 사이의 뷰포트 (28) 의 움직임을 나타내는 평면도이다. 이들 부분은 또한 실선으로 표시된다.
도 5 는 입체 모델 (32) 을 나타내고, 뷰포트 (34) 의 위치가 입체 모델 (32) 의 제 1 면 (32a) 정면에 있는 34a 로 나타난 제 1 위치로부터 입체 모델 (32) 의 인접하는 면 (32b) 정면에 있는 34b 로 나타난 제 2 위치로 어떻게 갑자기 변화하는지를 도시한다. 앞서 설명된 실시형태에서, 이런 뷰포트의 위치 변화는 커서가 (도 5 에 도시된 바와 같은) 입체 모델 (32) 의 면 (32a) 의 우측 에지로 접근할 때 발생한다.
커서를 이용하는 바람직한 실시형태에서, 에지의 경우, 모델의 방위는 커서의 포인트에서 2 개의 면에 의해 형성된 "각도" 의 이등분 평면을 팔로윙한다.
버텍스 불연속성의 경우에 대해, 일 구현에서, 커서가 버텍스에 접근할 때, 커서의 움직임은, 버텍스 상의 제한의 교차점 및 커서를 제어하는 마우스 또는 다 른 제어 디바이스의 움직임에 의해 결정된다. 선택되는 면 또는 에지는 마우스의 움직임에 가장 가까운 것일 것이다. 오직 하나의 면만이 가시적이고 다른 면들은 숨겨져 있는 경우, 예외가 이루어지고, 가시적인 면으로부터 이격된 버텍스 외부의 움직임은 이웃하는 숨겨진 면들 중 하나의 면을 향한 움직임으로서 해석될 것이다. 선택된 면은 가장 구속받지 않는 구성요소의 움직임을 가지는 면일 것이다.
3-D 이미지를 제공하는데 이용되는 카메라의 얼라인먼트에 대한 예로 돌아가서, 특히, 이러한 카메라에 의해 제공된 뷰의 방위의 변화 및 위치지정을 고려하여, Cx 가 카메라 뷰의 x-축이고, Cy 가 카메라 뷰의 y-축이며, Cz 는 카메라의 뷰잉 방향 (뷰의 z-축) 이 되도록, C 가 전역좌표계 (WCS; world coordinate system) 에서 표현된 카메라의 좌표계를 표시한다고 둔다. C 는 WCS 에서 시점 및 뷰의 방위를 결정한다. 카메라의 프로젝션은 원근 프로젝션 또는 직교 프로젝션일 수도 있다. 또한, P 는 피킹 라인 (커서를 통해서 도시된 3-차원 라인 내의 라인) 을 나타내고, Up 은 전역좌표계의 절대 수직을 나타낸다.
3-차원 좌표 (R.Vx, R.Vy, 및 R.Vz) 에 정의된 선택된 부분의 곡선 상의 포인트인 R 을 고려하면, R.Origin 은 곡선상의 Cz 축의 가장 가까운 포인트로서 정의되고, R.Vx 는 T 와 동일하며, T 는 R.Origin 에서 곡선의 접선이다. T 가 Up 와 동일 선상에 있는 경우, R.Vy 는 T 와 동일 선상에 있지 않은 임의의 축이다. 이와 다르게, R.Vy 는 Up 이다. R.Vz 는 외적 (cross product) (R.Vx, R.Vy) 이다. 커서 주위에서 컴퓨팅된 3-차원 좌표계인 Rcursor 를 고려하면, Rcursor.Origin 은 곡선 상에서 P 의 가장 가까운 포인트이고; Rcursor.Vx 는 Rcursor.Origin 에서의 곡선의 접선인 Tcursor 와 동일하다. Tcursor 가 Up 와 동일 선상에 있는 경우, Rcursor.Vy 는 Tcursor 과 동일 선상에 있지 않은 임의의 축이다. 그렇지 않으면, Rcursor.Vy 는 Up 와 동일하다. Rcursor.Vz 는 외적 (Rcursor.Vx, Rcursor.Vy) 이다.
곡선을 팔로윙하는 카메라의 새로운 위치를 컴퓨팅하기 위해, 곡선을 팔로윙하는데 필수적인 카메라의 위치를 정의하는 WCS 로 표현된 3-차원 좌표계인 Cnew 를 컴퓨팅하도록 탐색하는 방법이 이용된다. Ctemp 는 전역좌표계로부터 R 좌표계로 C 변환된다. Ctemp 는 현재 Rcursor 로 표현되어 있는 것으로서 고려되고, "역 (reverse)" 변환은 전역좌표계에서 Ctemp 를 표현하도록 컴퓨팅된다. 따라서, Rcursor 로부터 WCS 로 변환됨에 따라 Cnew 는 Ctemp 와 동일하다. Ccursor 는 전역좌표계에서 뷰의 새로운 포인트 및 뷰의 새로운 방위를 결정한다.
다른 실시형태에서, 변위 (displacement) 는 "평활화되며 (smoothed)", 곡선 상의 R.Origin 과 Rcursor.Origin 사이의 중간 포인트가 고려된다. 부분의 기하학적 형상이 표면인 경우, 이 방법은 동일하지만, T 는 커서에 가까운 면에 대해 수직인 N 으로 대체된다.
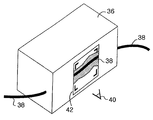
도 6a 및 도 6b 를 다시 참조하여, 도 6a 을 먼저 참조하면, 곡선형 라인 (38) 형태의 팔로윙될 부분뿐만 아니라 현재의 시점 (40) 및 뷰포트 또는 스크린 (42) 을 나타내는 3 차원 이미지 또는 컴퓨터 모델 (36) 의 사시도가 제공된다. 도 6a 에서, 인에이블되지 않고 선택된 부분, 즉, 곡선형 라인 (38) 을 가지는 팔 로워 시스템은 사용자에게 가시적이지 않다. 도 6b 에서, 팔로워 시스템이 인에이블되고, 3-차원 이미지 또는 컴퓨터 모델 내의 선택된 부분 (38) 은 뷰포트 (42) 의 스크린을 통해서 가시적이다. 이 실시형태에서, 곡선이 전체 스크린 (42) 을 통해 가시적이다. 또한, 앞서 설명된 도 5 와 유사한 도 6c 에 도시된 바와 같이, 뷰는 사용자의 방위와 관련해서만 커서를 팔로윙한다.
도 7a 및 도 7b 를 참조하여, 팔로워 시스템이 인에이블된 3 개의 상이한 실시형태들이 도시된다. 도 7a 및 도 7b 는 도 6a 및 도 6b 와 유사하고, 동일한 엘리먼트는 동일한 참조 번호가 주어진다. 도 7a 에서, 스크린 (42) 의 뷰 (40) 가 (우측에 있는) 제 1 위치로부터 "n" 포인트로 커서를 팔로윙하고, 곡선 (38) 은 전체 스크린 (42) 에 걸쳐 가시적이다.
도 7b 의 실시형태에서, 팔로워 시스템은 다시 인에이블되지만, 뷰 (40) 는 스크린 (42) 상의 커서를 팔로윙하지 않는다. 대신에, 스크린 (42) 상의 절단 (cutaway) 영역 (44) 은, 선택된 부분 (38) 의 상이한 부분들이 스크린 (42) 상의 관련 절단 영역 (44) 을 통해 나타나도록, 부분 (38) 을 따라서 이동함에 따라서 커서를 팔로윙한다.
도 7c 의 실시형태에서, 팔로워 시스템은 다시 인에이블되고, 도 7a 에서와 같이, 뷰 (40) 가 (우측에 있는) 제 1 위치로부터 "n" 위치로 변화하도록, 뷰 (40) 는 커서를 팔로윙하고, 도 7c 에 표시되었지만 도 7a 와는 대조적으로 나타난 바와 같이, 부분 (곡선) (38) 은 절단 영역 (44) 에서만 가시적이다.
도 8 을 참조하여, 본 발명의 추가적인 실시형태에 따른 팔로워 방법의 플로 우차트가 도시된다. 이 실시형태에서, 제 1 단계 (50) 에서, 그 뷰잉을 허용하도록 부분 또는 대상물 정면에 있는 장애물들 (예를 들어, 다른 부분 또는 다른 대상물) 을 제거함으로써 선택될 부분 또는 대상물 (예를 들어, 파이프) 에 액세싱하는데 모니터 키 (예를 들어, TAB 키) 가 이용된다.
다음 단계 (단계 (52)) 에서, 추가적인 모니터 키를 이용하여 부분이 선택되고, 단계 (54) 로 표시된 바와 같이, 그 부분의 피쳐 (예를 들어, 그 부분의 범위) 는 그 부분을 따라서 커서를 이동시킴으로써 완전하게 팔로윙된다.
블록 (56) 으로 표시된 바와 같이, 그 부분을 따라 커서가 이동하면서, 그 부분의 뷰잉을 방해하는 그 부분의 정면에 나타나는 임의의 장애물 (다른 부분, 다른 대상물 등) 은 제거되거나, 또는, 다른 방식으로 무효화 (negate) 되어 그 부분의 연속적인 뷰잉 및 팔로윙을 가능하게 한다. 전술한 바와 같이, 이러한 장애물의 제거 또는 무효화는, 그 부분이 장애물을 통해서 뷰잉될 수 있도록, 스크린 이미지로부터 사실상 완전하게 장애물을 제거하거나, 또는, 고스트 또는 유령 라인으로 장애물을 나타냄으로써 달성될 수 있다. 바람직하게, 커서가 피쳐를 따라서 이동되는 것이 계속됨에 따라, 장애물이 커서의 영역 내에 있는 부분의 뷰잉을 더 이상 방해하지 않으면, 장애물 (추가적인 부분 또는 대상물) 이 복원되고, 이전과 같이, 즉, 고형의 부분 또는 대상물로서 다시 나타난다.
이 실시형태의 추가적인 특징에 따르면, 부분이 팔로윙됨에 따라, 그 부분이 팔로윙되는 것을 계속할 수 있도록, 뷰, 즉, 모니터 스크린상의 모델의 이미지는 커서 움직임의 방향으로 완전한 모델을 더 나타내도록 변화된다. 일 바람직한 실시형태에서, 블록 (58) 으로 나타난 바와 같이, 커서가 그 부분을 따라서 이동됨에 따라, 스크린상에 표시된 모델의 뷰는 이전에 표시되지 않았던 커서 움직임의 방향으로 위치된 모델의 추가적인 부분을 표시하도록 변화된다. 또한, 바람직한 실시형태에서, 블록 (58) 으로 표시된 바와 같이, 피쳐를 팔로윙하는 경우 커서는 뷰가 재위치될 때 스크린의 중심 영역으로 이동되며, 즉, 재위치된다. 일 실시형태에서, 이러한 재위치는, 커서가 스크린 바운더리 (예를 들어, 모니터 스크린의 일 에지) 에 직면했을 때 발생한다. 즉, 커서가 스크린 에지에 도달할 때, 계속되는 커서 움직임이 일어날 수 있도록, 커서는 스크린상에 재위치 (예를 들어, 재중심화) 되고, 이러한 새로운 더욱 중심의 위치로부터 계속될 것이다. 바람직한 실시형태에서, 커서가 소정 방향으로 이동함에 따라 뷰의 재위치 (재중심화) 와 동시에 그리고 자동으로 커서의 재위치 또는 재중심화가 일어나고, 뷰와 커서의 이런 재위치는 스크린 바운더리에 마주치는 커서에 대해 의존하지 않는다.
몇몇 바람직한 실시형태의 추가적인 특징에 따르면, 팔로워 동작 도중에, 즉, 선택된 부분이 팔로윙되는 동안 관심 정보가 표시된다. 통상적으로, 측정은, 공간 xyz 좌표에서 수행되고, 곡선 좌표계에서는 수행되지 않는다. 일 유리한 실시형태에서, 표면상의 곡선의 길이, 또는 에지의 길이가 컴퓨팅되고 표시된다. 예를 들어, 파이프 입구의 포인트로부터 파이프 내의 방해물이 발생할 수도 있는 위치까지, 파이프의 길이, 또는 파이프의 일부의 길이가 측정될 수도 있다.
다른 구현에서, 예를 들어, 각각의 특정 포인트로 파이프 또는 표면을 따른 곡선의 길이를 나타내는 선택된 부분을 따라서 마크 (mark) 가 제공된다. 이러한 정보는 다시 표시될 것이다.
추가적인 유리한 특징에 따르면, 팔로워 동작을 인에이블시키기 위해, 즉, 팔로워 시스템이 인에이블될 때 및 팔로워 시스템이 디스에이블 될 때를 결정하기 위해, 3-D 장면상에 팔로워 마커가 제공된다. 예를 들어, 곡선상의 특정 위치에 배치된 3D 링과 같은 장면에 3D 또는 2D 마커가 생성될 수도 있다. 비교적 많은 수의 마커가 곡선의 상이한 가로좌표에 생성될 수도 있고, 또는, 3D 면, 또는 3D 포인트상에 직접적으로 위치될 수도 있다. 예를 들어, 일 구현에서, 커서가 마커상에 있는 경우 사용자가 좌측 마우스 버튼을 누르면, 팔로워 시스템은 링크된 기하학적 형상 (즉, 마커 하부의 곡선 또는 표면) 에 관해 인에이블되고, 사용자가 좌측 마우스 버튼을 누름해제하는 경우, 팔로워 시스템은 디스에이블되고, 마커는 다음 사용을 위한 새로운 위치로 옮겨진다.
바람직한 방법의 다른 특징은, 전술한 계산에 기초한 부분의 표면의 측정 및 다른 양태를 컴퓨팅하는 단계를 포함한다. 유리한 실시형태에서, 이 방법은 곡선 측정을 이용하여 거리 및 길이를 컴퓨팅할 수도 있다.
또한, 마커를 이용하는 다른 유리한 구현에서, 사용자는, 선택된 포인트들 사이의 거리를 컴퓨팅하기 위해 특정 포인트에 마커를 제공할 수도 있다. 사용자는, 상이한 곡선 가로좌표에서 마커들을 생성할 수도 있고, 또는, 3-차원 면 또는 포인트들상에 직접적으로 배치시킬 수도 있다. 예를 들어, 커서가 마커상에 있을 때 사용자가 좌측 마우스 버튼을 누르는 경우, 팔로워는 링크된 기하학적 형 상 (마커 하부의 곡선 또는 표면) 상에서 인에이블되고, 사용자가 좌측 마우스 버튼을 누름 해제할 때, 팔로워 메커니즘이 디스에이블되며, 마커는 이후의 사용을 위한 새로운 위치로 옮겨진다.
전술한 바와 같이, 선택된 부분의 팔로윙을 방해하는 장애물들이 전체 스크린 또는 스크린의 단지 일부로부터 제거될 수도 있다. 사용자로 하여금 방해물 또는 장애물이 제거되는 영역의 크기 및 형상을 정의하게 하는 규정이 구축되는 것이 바람직하다. 따라서, 이 영역은 전체 스크린일 수도 있지만, 이 영역은 사용자의 용도 및 희망에 따라서, 선택된 부분의 주변에 있는 외접 영역으로 제한될 수도 있다.
추가적인 특징에 따르면, 팔로윙된 경로는 애니메이션 또는 AVI 를 생성하도록 이용될 수도 있다. 또한, 이하 더욱 상세하게 설명되는 바와 같이, 팔로워는 GPS 시스템과 결합될 수도 있다.
바람직한 실시형태에서, 사용자는, 랩탑 또는 휴대용 PC 를 이용하여 실시간으로 그리고 현재 위치에서 선택된 부분을 팔로윙하고, 예를 들어, 사용자로 하여금 벽 내에 배치된 파이프 또는 매복된 파이프를 팔로윙하도록 허용하는 팔로워 시스템을 이용할 수 있다. 이 예에서, 파이프에 액세스가능할 때, (i) 파이프의 위치 및 (ii) 파이프가 매복된 깊이로서, 3D 이미지상에서 실제-위치 "판독" 을 제공하기 위해 "0 (zero)" 로의 리셋이 수행된다. 전술한 바와 같이, 빌딩 내의 덕트, 정제소 또는 화학물질 공장 내의 파이프 및 수많은 다른 상황에서 팔로윙하는데 유사한 어플리케이션이 이용될 수 있다.
또한, 앞서 설명된 바와 같이, 바람직한 실시형태에서, 선택된 부분에서의 회전 또는 구부려짐 (예를 들어, 파이프 또는 전기 도관 내에서 90 도 굴곡) 을 팔로윙하기 위해 모델은 돌거나 회전할 수 있고, 이 경우, 스크린상의 3-차원 이미지는 사용자로 하여금 사용자의 물리적 공간 좌표를 갖는 모델의 현재 뷰잉 좌표를 참조하는 것을 가능하게 할 것이다.
또한, 팔로워 시스템은 국부적 또는 전면적 좌표에서 위치 및 방위의 표시를 제공하는 6 자유도 디바이스를 통해 이용될 수 있다. Pohlhemus 에 의해 만들어진 것과 같은 디바이스가 국부적 6 자유도를 제공하기 위해 이용될 수 있다. 또한, 글로벌 좌표는, 예를 들어, 3 축 가속도계에 GPS 를 커플링하는 것과 같은 다른 방법으로 제공될 수 있다.
팔로윙 시스템의 추가적인 유리한 특징에 따르면, 모델 및 이 모델을 구현하는데 이용된 물리적 대상물 모두의 결합된 뷰잉이 제공된다. 일 구현에서, 타블렛 PC 에는 팔로워 시스템이 설치되어 있고, 소프트웨어의 뷰포트를 제어하기 위해 측정이 이용된다. 타블렛 PC 는 고정된 거리로 (예를 들어, 암 길이로) 유지될 수 있고, 소프트웨어의 뷰포트는 선택된 부분 (예를 들어, 파이프) 의 방해받는 뷰의 뷰잉을 커버할 것이고, 선택된 부분의 뷰를 인시츄로 제공할 것이다.
다른 유리한 구현에서, 소형 디스플레이는 뷰어의 하나의 눈에 근접하여 탑재된다. 시차차를 갖는 육안 (naked eye) 이 방해받고 있는 뷰를 보는 동안, 이 하나의 눈에는, 예를 들어, 그 부분의 모델의 방해받지 않는 뷰인 이미지를 수신한다.
다른 구현에서, 각각의 눈은 별개의 디스플레이로부터의 각각의 이미지를 수신한다. 모델의 감지된 이미지 및 물리적 대상물의 감지된 이미지에 있어서의 위치 및 배열이 일치하도록, 각각의 눈에 생성된 이미지는 적절한 등록을 제공하도록 적절하게 보상된다. 모델의 가상 이미지 및 물리적 이미지가, 예를 들어, 반-반사 코팅을 통해 광학 엘리먼트들을 이용함으로써 혼합될 수 있다.
몇몇 실시형태에서, 모델이 예를 들어, 파이프 내의 90 도 굴곡을 팔로윙하기 위해 회전할 때, 사용자로 하여금 모델의 현재 뷰잉 좌표를 사용자의 물리적 공간 좌표와 함께 참조하게 하는 스크린상에 3-차원 참조 대상물이 제공된다.
추가적인 실시형태에서, 절단하기 위해, 즉, 선택된 대상물의 단면도를 제공하기 위해 절단 평면이 위치된다. 예를 들어, 복수의 파이프가 큰 튜브 내에 배치되어 있을 때 유용할 것이다. 이러한 절단 평면은 사용자의 시점에 대해 수직이고, 그 위치지정은 앞서 실시형태에 대해 상술된 바와 같이 커서 등의 움직임을 팔로윙할 것이다.
본 발명이 바람직한 수많은 실시형태와 관련하여 설명되었지만, 설명된 특정 방법 및 시스템은 본 발명의 상이한 양태 및 원리를 단지 예시하는 것이며, 본 발명의 사상 및 범위를 벗어나지 않는 한 설명된 방법 및 시스템에서 다양한 변형이 이루어질 수도 있다는 것이 이해된다.
Claims (53)
- 컴퓨터 상에서 실행되는 소프트웨어에 의해 구현되는, 복수의 별개의 부분들을 포함하는 어셈블리의 3-차원 컴퓨터 모델에서 부분의 기하학적 피쳐를 팔로윙 (following) 하는 방법으로서,상기 컴퓨터에 의해, 상기 3-차원 컴퓨터 모델을 컴퓨터 스크린 상에 표시하는 단계;상기 컴퓨터에 대한 인터페이스를 통하여, 상기 컴퓨터에 의해, 상기 어셈블리의 복수의 부분들 중에서 상기 부분의 선택을 수신하는 단계; 및상기 컴퓨터에 의해, 상기 3-차원 컴퓨터 모델을 프로세싱하여, 상기 선택에 의해 선택된 선택된 부분이 팔로윙됨에 따라 상기 선택된 부분의 뷰잉을 허용하기 위해 상기 선택된 부분의 뷰잉을 방해하는 상기 선택된 부분과는 상이한 상기 어셈블리의 임의의 다른 부분들을 동시에 그리고 자동으로 제거하면서, 상기 선택된 부분의 기하학적 피쳐를 따라서 상기 선택된 부분을 팔로윙하는 단계를 포함하고,사용자에게 제공되는 상기 3-차원 컴퓨터 모델의 시점의 방위는, 뷰의 방향으로 연장되는 라인 및 상기 기하학적 피쳐의 접선 사이에 정의된 각도가 일정하게 유지되도록 변화되는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 1 항에 있어서,이전에 표시되지 않았고 상기 선택된 부분이 팔로윙되는 방향으로 위치된 상기 3-차원 컴퓨터 모델의 추가 부분을 표시하기 위해 상기 컴퓨터 스크린상에 상기 3-차원 컴퓨터 모델을 재위치시킴으로써 상기 기하학적 피쳐가 상기 방향으로 더욱 팔로윙될 수 있게 하는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 1 항에 있어서,상기 부분의 선택은, 상기 부분의 선택의 초기 단계에서, 상기 3-차원 컴퓨터 모델로부터 상기 선택된 부분의 뷰잉을 방해하는 임의의 장애물들을 자동으로 제거하는 단계를 포함하는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 1 항에 있어서,상기 선택을 수신하는 단계는, 커서를 이용하여 상기 부분을 선택하는 단계를 포함하는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 1 항에 있어서,상기 선택을 수신하는 단계는, 디렉토리 트리 구조로부터 상기 부분을 선택하는 단계를 포함하는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 1 항에 있어서,상기 선택을 수신하는 단계는, 상기 부분을 포함하는 층을 제외한 상기 3-차원 컴퓨터 모델의 모든 층들을 필터링하는 단계를 포함하는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 1 항에 있어서,상기 선택된 부분을 팔로윙하는 단계는, 사용자에 의해 선택된 소정의 속도 로 상기 부분을 자동으로 팔로윙하는 단계를 포함하는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 1 항에 있어서,상기 선택된 부분을 팔로윙하는 단계는, 커서를 이용하여 3-차원 이미지를 표시하는 스크린상에서 상기 선택된 부분을 팔로윙하는 단계를 포함하는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 1 항에 있어서,상기 선택된 부분은 파라메트릭 곡선 모델에 의해 표현되고, 상기 파라메트릭 곡선 모델을 뷰잉하는 시점은 상기 파라메트릭 곡선 모델의 접선에 대해 수직인 뷰잉 평면 내에 제공되는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 9 항에 있어서,상기 파라메트릭 곡선 모델의 기하학적 형태에서의 각각의 변화에 대해 새로운 접선이 확립되는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 1 항에 있어서,상기 선택된 부분의 선택된 표면에 대해 수직인 평면이 컴퓨팅되고,상기 3-차원 컴퓨터 모델에서 상기 선택된 부분이 뷰잉되는 시점은 상기 수 직 평면에 관련하여 정의되는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 1 항에 있어서,상기 선택된 부분을 팔로윙하는 단계는, 커서의 움직임을 상기 선택된 부분으로 제한하면서 상기 선택된 부분을 따라서 상기 커서를 이동시키는 단계를 포함하는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 12 항에 있어서,상기 커서의 움직임을 상기 선택된 부분으로 제한할 때, 상기 커서의 움직임이 상기 선택된 부분의 한계 내에 있는 한, 상기 커서를 제어하는 입력 디바이스의 움직임은 상기 커서의 움직임을 일으키는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 1 항에 있어서,상기 선택된 부분은 서브-부분들의 어셈블리를 포함하는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 14 항에 있어서,상기 서브-부분들의 어셈블리는 병합 동작을 통해서 정의되는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 14 항에 있어서,상기 서브-부분들의 어셈블리는 상기 서브-부분들의 공통 특성에 기초하는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 1 항에 있어서,상기 선택된 부분은 단일 별개의 부분을 포함하는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 1 항에 있어서,상기 3-차원 컴퓨터 모델은 체적 모델을 포함하고,상기 선택된 부분은 커서를 이용하여 팔로윙되며,상기 커서의 움직임은 스칼라장, 벡터장 및 텐서장 (tensorial field) 중 하나의 장 내의 값들을 이용하여 상기 선택된 부분으로 제한되는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 1 항에 있어서,상기 선택된 부분을 팔로윙하는 것에 관련하여 오디오 출력이 이용되는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 19 항에 있어서,상기 선택된 부분을 팔로윙하는데 커서가 이용되고,상기 오디오 출력은 상기 커서가 상기 선택된 부분을 팔로윙하는 한 생성되는 연속적인 톤을 포함하는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 19 항에 있어서,상기 선택된 부분을 팔로윙하기 위해 상기 선택된 부분으로 제한된 커서가 이용되고,상기 선택된 부분이 팔로윙되지 않을 때에 대한 표시를 제공하기 위해 상기 오디오 출력이 이용되는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 21 항에 있어서,상기 오디오 출력은, 상기 선택된 부분이 팔로윙되지 않을 때 생성되는 가청 경보를 포함하는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 21 항에 있어서,상기 오디오 출력은, 상기 선택된 부분을 팔로윙하는 단계 동안 직면되는 부적합 (incongruity) 에 응답하여 생성되는 가청 경보를 포함하는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 1 항에 있어서,상기 선택된 부분의 상기 기하학적 피쳐를 나타내는데 일련의 포인트들이 이용되는, 기하학적 피쳐를 팔로윙하는 방법.
- 삭제
- 제 1 항에 있어서,상기 기하학적 피쳐는 상기 선택된 부분의 표면이고,상기 뷰의 방향으로 연장되는 라인 및 상기 표면에 대한 법선 사이의 각도는 일정하게 유지되는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 1 항에 있어서,상기 선택된 부분의 연속성의 변화가 있는 경우, 상기 3-차원 컴퓨터 모델은 상기 연속성의 변화 이전의 방위로부터 새로운 방위로 즉시 이동되는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 27 항에 있어서,상기 연속성의 변화가 발생할 때, 경보가 제공되는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 27 항에 있어서,상기 선택된 부분을 팔로윙하는데 상기 3-차원 컴퓨터 모델이 뷰잉되는 뷰포트 내에서 이동하는 커서가 이용되고,상기 커서가 상기 뷰포트의 바운더리에 있는 포인트로 이동할 때, 상기 뷰포트는 상기 커서가 상기 선택된 부분을 계속해서 팔로윙할 수 있도록 전환되는, 기하학적 피쳐를 팔로윙하는 방법.
- 제 1 항에 있어서,상기 선택된 부분에 대한 수치와 관련하여 이루어진 계산들에 기초한 정보가 제공되는, 기하학적 피쳐를 팔로윙하는 방법.
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 삭제
- 제 1 항에 있어서,상기 선택된 부분의 뷰잉을 방해하는 장애물들은 상기 선택된 부분의 정면에 위치된 장애물들인, 기하학적 피쳐를 팔로윙하는 방법.
- 제 1 항에 있어서,제거된 장애물들은 상기 컴퓨터 스크린상에서 고스트 이미지들로서 남아 있는, 기하학적 피쳐를 팔로윙하는 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/545,773 US20080088621A1 (en) | 2006-10-11 | 2006-10-11 | Follower method for three dimensional images |
| US11/545,773 | 2006-10-11 | ||
| PCT/US2007/080937 WO2008045934A2 (en) | 2006-10-11 | 2007-10-10 | Follower method for three dimensional images |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20090088355A KR20090088355A (ko) | 2009-08-19 |
| KR101482802B1 true KR101482802B1 (ko) | 2015-01-14 |
Family
ID=39283587
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020097007497A KR101482802B1 (ko) | 2006-10-11 | 2007-10-10 | 3 차원 이미지에 대한 팔로워 방법 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20080088621A1 (ko) |
| EP (1) | EP2076887B1 (ko) |
| JP (1) | JP5038429B2 (ko) |
| KR (1) | KR101482802B1 (ko) |
| CN (1) | CN101816020A (ko) |
| CA (1) | CA2665401A1 (ko) |
| WO (1) | WO2008045934A2 (ko) |
Families Citing this family (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10795457B2 (en) | 2006-12-28 | 2020-10-06 | D3D Technologies, Inc. | Interactive 3D cursor |
| US11315307B1 (en) | 2006-12-28 | 2022-04-26 | Tipping Point Medical Images, Llc | Method and apparatus for performing rotating viewpoints using a head display unit |
| US11228753B1 (en) | 2006-12-28 | 2022-01-18 | Robert Edwin Douglas | Method and apparatus for performing stereoscopic zooming on a head display unit |
| US11275242B1 (en) | 2006-12-28 | 2022-03-15 | Tipping Point Medical Images, Llc | Method and apparatus for performing stereoscopic rotation of a volume on a head display unit |
| US9891783B2 (en) * | 2007-09-26 | 2018-02-13 | Autodesk, Inc. | Navigation system for a 3D virtual scene |
| CA2703072C (en) | 2007-12-13 | 2016-01-26 | Exxonmobil Upstream Research Company | Iterative reservoir surveillance |
| AU2009238481B2 (en) | 2008-04-22 | 2014-01-30 | Exxonmobil Upstream Research Company | Functional-based knowledge analysis in a 2D and 3D visual environment |
| US8892407B2 (en) * | 2008-10-01 | 2014-11-18 | Exxonmobil Upstream Research Company | Robust well trajectory planning |
| AU2009311619B2 (en) | 2008-11-06 | 2015-10-01 | Exxonmobil Upstream Research Company | System and method for planning a drilling operation |
| WO2010106525A1 (en) * | 2009-03-20 | 2010-09-23 | Koninklijke Philips Electronics N.V. | Visualizing a view of a scene |
| US8600708B1 (en) * | 2009-06-01 | 2013-12-03 | Paradigm Sciences Ltd. | Systems and processes for building multiple equiprobable coherent geometrical models of the subsurface |
| US8743115B1 (en) | 2009-10-23 | 2014-06-03 | Paradigm Sciences Ltd. | Systems and methods for coordinated editing of seismic data in dual model |
| EP2521352B1 (en) * | 2009-12-28 | 2014-03-26 | Panasonic Corporation | Operation sound guide device and operation sound guide method |
| AU2010345083B2 (en) | 2010-02-03 | 2016-03-10 | Exxonmobil Upstream Research Company | Method for using dynamic target region for well path/drill center optimization |
| US8731872B2 (en) * | 2010-03-08 | 2014-05-20 | Exxonmobil Upstream Research Company | System and method for providing data corresponding to physical objects |
| WO2011112221A1 (en) | 2010-03-12 | 2011-09-15 | Exxonmobil Upstream Research Company | Dynamic grouping of domain objects via smart groups |
| US8731887B2 (en) | 2010-04-12 | 2014-05-20 | Exxonmobile Upstream Research Company | System and method for obtaining a model of data describing a physical structure |
| US8727017B2 (en) | 2010-04-22 | 2014-05-20 | Exxonmobil Upstream Research Company | System and method for obtaining data on an unstructured grid |
| US8731873B2 (en) | 2010-04-26 | 2014-05-20 | Exxonmobil Upstream Research Company | System and method for providing data corresponding to physical objects |
| CA2806196C (en) | 2010-08-04 | 2016-08-23 | Exxonmobil Upstream Research Company | System and method for summarizing data on an unstructured grid |
| US8731875B2 (en) | 2010-08-13 | 2014-05-20 | Exxonmobil Upstream Research Company | System and method for providing data corresponding to physical objects |
| EP2609540B1 (en) | 2010-08-24 | 2020-07-22 | Exxonmobil Upstream Research Company | System and method for planning a well path |
| CA2823017A1 (en) | 2011-01-26 | 2012-08-02 | Exxonmobil Upstream Research Company | Method of reservoir compartment analysis using topological structure in 3d earth model |
| AU2011360212B2 (en) | 2011-02-21 | 2017-02-02 | Exxonmobil Upstream Research Company | Reservoir connectivity analysis in a 3D earth model |
| US9223594B2 (en) | 2011-07-01 | 2015-12-29 | Exxonmobil Upstream Research Company | Plug-in installer framework |
| US20130117710A1 (en) * | 2011-11-03 | 2013-05-09 | Sap Ag | System and Method of Viewing Updating for Planning Item Assemblies |
| WO2013169429A1 (en) | 2012-05-08 | 2013-11-14 | Exxonmobile Upstream Research Company | Canvas control for 3d data volume processing |
| EP2863204B1 (en) * | 2012-06-14 | 2017-11-01 | Sony Corporation | Information processing device, information processing method, and information processing program |
| US10139985B2 (en) | 2012-06-22 | 2018-11-27 | Matterport, Inc. | Defining, displaying and interacting with tags in a three-dimensional model |
| US10127722B2 (en) | 2015-06-30 | 2018-11-13 | Matterport, Inc. | Mobile capture visualization incorporating three-dimensional and two-dimensional imagery |
| US9786097B2 (en) * | 2012-06-22 | 2017-10-10 | Matterport, Inc. | Multi-modal method for interacting with 3D models |
| US10163261B2 (en) | 2014-03-19 | 2018-12-25 | Matterport, Inc. | Selecting two-dimensional imagery data for display within a three-dimensional model |
| AU2014278645B2 (en) | 2013-06-10 | 2016-07-28 | Exxonmobil Upstream Research Company | Interactively planning a well site |
| US9864098B2 (en) | 2013-09-30 | 2018-01-09 | Exxonmobil Upstream Research Company | Method and system of interactive drill center and well planning evaluation and optimization |
| EP2889738B1 (en) * | 2013-12-30 | 2020-08-12 | Dassault Systèmes | Computer-implemented method for designing a three-dimensional modeled object |
| US10650106B2 (en) * | 2015-01-28 | 2020-05-12 | Matterport, Inc. | Classifying, separating and displaying individual stories of a three-dimensional model of a multi-story structure based on captured image data of the multi-story structure |
| US10466854B2 (en) * | 2016-06-10 | 2019-11-05 | Hexagon Technology Center Gmbh | Systems and methods for accessing visually obscured elements of a three-dimensional model |
| US10217265B2 (en) * | 2016-07-07 | 2019-02-26 | Disney Enterprises, Inc. | Methods and systems of generating a parametric eye model |
| US10217275B2 (en) * | 2016-07-07 | 2019-02-26 | Disney Enterprises, Inc. | Methods and systems of performing eye reconstruction using a parametric model |
| US10466388B2 (en) | 2016-09-07 | 2019-11-05 | Emerson Paradigm Holding Llc | System and method for editing geological models by switching between volume-based models and surface-based structural models augmented with stratigraphic fiber bundles |
| US11156744B2 (en) | 2019-01-10 | 2021-10-26 | Emerson Paradigm Holding Llc | Imaging a subsurface geological model at a past intermediate restoration time |
| US10520644B1 (en) | 2019-01-10 | 2019-12-31 | Emerson Paradigm Holding Llc | Imaging a subsurface geological model at a past intermediate restoration time |
| CN111078346B (zh) * | 2019-12-19 | 2022-08-02 | 北京市商汤科技开发有限公司 | 一种目标对象显示方法及装置、电子设备和存储介质 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10234663A (ja) * | 1997-02-27 | 1998-09-08 | Toshiba Corp | 画像処理装置 |
| JPH10295639A (ja) * | 1997-02-27 | 1998-11-10 | Toshiba Corp | 画像処理システム |
| US6346940B1 (en) * | 1997-02-27 | 2002-02-12 | Kabushiki Kaisha Toshiba | Virtualized endoscope system |
| JP2004147778A (ja) | 2002-10-29 | 2004-05-27 | Olympus Corp | 画像処理装置及び内視鏡画像処理装置 |
Family Cites Families (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL8600831A (nl) * | 1986-04-02 | 1987-11-02 | Oce Nederland Bv | Werkwijze voor het opwekken en bewerken van modellen van twee- of driedimensionale objecten in een computer en voor het weergeven van die modellen op een display. |
| US4799103A (en) * | 1986-10-10 | 1989-01-17 | Seton Health Care Foundation | Three-dimensional laser driven display apparatus |
| US4754267A (en) * | 1986-11-03 | 1988-06-28 | International Business Machines Corporation | Fast point/line correlations in graphic entities |
| US5182775A (en) * | 1990-01-12 | 1993-01-26 | Kawasaki Jukogyo Kabushiki Kaisha | Method of processing radiographic image data for detecting a welding defect |
| US5185150A (en) * | 1990-08-24 | 1993-02-09 | Wisconsin Alumni Research Fdn. | Cosmetic compositions containing 19-nor-vitamin D compounds |
| NL192610C (nl) * | 1990-12-13 | 1997-11-04 | Enschede & Zonen Grafisch | Beelddrager en werkwijze voor het op een beelddrager drukken van een beeld. |
| US5289567A (en) * | 1991-04-01 | 1994-02-22 | Digital Equipment Corporation | Computer apparatus and method for finite element identification in interactive modeling |
| US5377314A (en) * | 1992-12-21 | 1994-12-27 | International Business Machines Corporation | Method and system for selective display of overlapping graphic objects in a data processing system |
| US5528735A (en) * | 1993-03-23 | 1996-06-18 | Silicon Graphics Inc. | Method and apparatus for displaying data within a three-dimensional information landscape |
| US5818455A (en) * | 1993-07-21 | 1998-10-06 | Xerox Corporation | Method and apparatus for operating on the model data structure of an image to produce human perceptible output using a viewing operation region having explicit multiple regions |
| US5467441A (en) * | 1993-07-21 | 1995-11-14 | Xerox Corporation | Method for operating on objects in a first image using an object-based model data structure to produce a second contextual image having added, replaced or deleted objects |
| CA2124624C (en) * | 1993-07-21 | 1999-07-13 | Eric A. Bier | User interface having click-through tools that can be composed with other tools |
| US5729704A (en) * | 1993-07-21 | 1998-03-17 | Xerox Corporation | User-directed method for operating on an object-based model data structure through a second contextual image |
| JP3437223B2 (ja) * | 1993-08-25 | 2003-08-18 | キヤノン株式会社 | 形状表示装置および形状表示方法 |
| JP3599360B2 (ja) * | 1993-08-25 | 2004-12-08 | キヤノン株式会社 | 形状モデリング装置及び形状モデリング方法 |
| US5920319A (en) * | 1994-10-27 | 1999-07-06 | Wake Forest University | Automatic analysis in virtual endoscopy |
| US5782762A (en) * | 1994-10-27 | 1998-07-21 | Wake Forest University | Method and system for producing interactive, three-dimensional renderings of selected body organs having hollow lumens to enable simulated movement through the lumen |
| US5819062A (en) * | 1994-12-05 | 1998-10-06 | Motorola Inc. | Method for converting design intent into a neutral-file-format for computer aided design applications |
| US6016147A (en) * | 1995-05-08 | 2000-01-18 | Autodesk, Inc. | Method and system for interactively determining and displaying geometric relationships between three dimensional objects based on predetermined geometric constraints and position of an input device |
| JP3654977B2 (ja) * | 1995-11-13 | 2005-06-02 | 東芝医用システムエンジニアリング株式会社 | 三次元画像処理装置 |
| US5815154A (en) * | 1995-12-20 | 1998-09-29 | Solidworks Corporation | Graphical browser system for displaying and manipulating a computer model |
| JPH10234664A (ja) * | 1997-02-27 | 1998-09-08 | Toshiba Corp | 画像処理装置 |
| JPH10320913A (ja) * | 1997-05-23 | 1998-12-04 | Sony Corp | データ記録装置および方法、データ再生装置および方法、データ記録再生装置および方法、並びに伝送媒体 |
| US6215495B1 (en) * | 1997-05-30 | 2001-04-10 | Silicon Graphics, Inc. | Platform independent application program interface for interactive 3D scene management |
| JP4053117B2 (ja) * | 1997-10-17 | 2008-02-27 | 東芝医用システムエンジニアリング株式会社 | 画像処理装置 |
| JP3256180B2 (ja) * | 1998-06-09 | 2002-02-12 | 株式会社モノリス | 三次元形状データの暗号化方法および復号方法 |
| US6771262B2 (en) * | 1998-11-25 | 2004-08-03 | Siemens Corporate Research, Inc. | System and method for volume rendering-based segmentation |
| US6859201B1 (en) * | 1999-01-28 | 2005-02-22 | Autodesk, Inc. | Method and apparatus for viewing a mechanical design |
| US6396522B1 (en) * | 1999-03-08 | 2002-05-28 | Dassault Systemes | Selection navigator |
| US6714201B1 (en) * | 1999-04-14 | 2004-03-30 | 3D Open Motion, Llc | Apparatuses, methods, computer programming, and propagated signals for modeling motion in computer applications |
| FR2795207B1 (fr) * | 1999-06-21 | 2001-08-17 | Ge Medical Syst Sa | Procede de visualisation d'une partie d'une image tridimensionnelle |
| JP3759356B2 (ja) * | 1999-11-26 | 2006-03-22 | 富士通株式会社 | 3次元モデル管理装置 |
| JP3854062B2 (ja) * | 2000-04-28 | 2006-12-06 | 株式会社モリタ製作所 | 断層面画像の表示方法、表示装置、この表示方法を実現するプログラムを記録した記録媒体 |
| US6654027B1 (en) * | 2000-06-09 | 2003-11-25 | Dassault Systemes | Tool for three-dimensional analysis of a drawing |
| JP2001357088A (ja) * | 2000-06-16 | 2001-12-26 | Denso Corp | パラメトリック機能を有する3次元モデリングシステムと、同システムによるパラメータ編集方法 |
| CA2317336A1 (en) * | 2000-09-06 | 2002-03-06 | David Cowperthwaite | Occlusion resolution operators for three-dimensional detail-in-context |
| US6856324B2 (en) * | 2001-03-27 | 2005-02-15 | Siemens Corporate Research, Inc. | Augmented reality guided instrument positioning with guiding graphics |
| CA2352844C (en) * | 2001-07-10 | 2009-11-17 | Geojet Information Solutions Inc. | 3-d map data visualization |
| JP4019353B2 (ja) * | 2002-03-18 | 2007-12-12 | 富士通株式会社 | 3次元仮想モデルの表示色管理方法、プログラム及び装置 |
| FR2846122B1 (fr) * | 2002-10-22 | 2005-04-15 | Eric Piccuezzu | Procede et dispositif de construction et de visualisation de l'image d'un modele informatique |
| US20070276214A1 (en) * | 2003-11-26 | 2007-11-29 | Dachille Frank C | Systems and Methods for Automated Segmentation, Visualization and Analysis of Medical Images |
| US7149596B2 (en) * | 2004-01-13 | 2006-12-12 | Sensable Technologies, Inc. | Apparatus and methods for modifying a model of an object to enforce compliance with a manufacturing constraint |
| US8042056B2 (en) * | 2004-03-16 | 2011-10-18 | Leica Geosystems Ag | Browsers for large geometric data visualization |
| US20070236514A1 (en) * | 2006-03-29 | 2007-10-11 | Bracco Imaging Spa | Methods and Apparatuses for Stereoscopic Image Guided Surgical Navigation |
| US7983473B2 (en) * | 2006-04-11 | 2011-07-19 | Noregin Assets, N.V., L.L.C. | Transparency adjustment of a presentation |
-
2006
- 2006-10-11 US US11/545,773 patent/US20080088621A1/en not_active Abandoned
-
2007
- 2007-10-10 WO PCT/US2007/080937 patent/WO2008045934A2/en active Application Filing
- 2007-10-10 CN CN200780037791A patent/CN101816020A/zh active Pending
- 2007-10-10 EP EP07844079.9A patent/EP2076887B1/en active Active
- 2007-10-10 JP JP2009532554A patent/JP5038429B2/ja active Active
- 2007-10-10 KR KR1020097007497A patent/KR101482802B1/ko active IP Right Grant
- 2007-10-10 CA CA002665401A patent/CA2665401A1/en not_active Abandoned
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10234663A (ja) * | 1997-02-27 | 1998-09-08 | Toshiba Corp | 画像処理装置 |
| JPH10295639A (ja) * | 1997-02-27 | 1998-11-10 | Toshiba Corp | 画像処理システム |
| US6346940B1 (en) * | 1997-02-27 | 2002-02-12 | Kabushiki Kaisha Toshiba | Virtualized endoscope system |
| JP2004147778A (ja) | 2002-10-29 | 2004-05-27 | Olympus Corp | 画像処理装置及び内視鏡画像処理装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CA2665401A1 (en) | 2008-04-17 |
| JP2010507150A (ja) | 2010-03-04 |
| KR20090088355A (ko) | 2009-08-19 |
| WO2008045934A2 (en) | 2008-04-17 |
| EP2076887A4 (en) | 2017-03-15 |
| US20080088621A1 (en) | 2008-04-17 |
| EP2076887B1 (en) | 2019-12-11 |
| CN101816020A (zh) | 2010-08-25 |
| EP2076887A2 (en) | 2009-07-08 |
| WO2008045934A3 (en) | 2008-11-20 |
| JP5038429B2 (ja) | 2012-10-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101482802B1 (ko) | 3 차원 이미지에 대한 팔로워 방법 | |
| RU2498408C2 (ru) | Реализуемые компьютером способ и система для дистанционного контроля производственного процесса | |
| US9317945B2 (en) | Detail-in-context lenses for navigation | |
| US7773098B2 (en) | Virtual reality presentation apparatus and method | |
| EP3458942B1 (en) | Display of three-dimensional model information in virtual reality | |
| CN111339588B (zh) | 一种二维图纸与三维模型检查方法、系统及存储介质 | |
| CN109712233B (zh) | 管线故障显示方法、系统、ar设备和存储介质 | |
| JP2010277115A (ja) | ハーネス検証装置およびハーネス検証プログラム | |
| CN108955723B (zh) | 增强现实市政管网的校准方法 | |
| EP3865982B1 (en) | Augmented viewing of a scenery and subsurface infrastructure | |
| CN115023740A (zh) | 对象的交互式三维表示 | |
| JP6449180B2 (ja) | 三次元画像表示システム、三次元画像表示装置、三次元画像表示方法及びプラント設備の三次元画像表示システム | |
| JP3691454B2 (ja) | 地盤変位測位システム | |
| US6919887B2 (en) | Navigational compass for drawing programs | |
| JPH0816813A (ja) | 画像形成方法及び装置、表示方法及び表示装置 | |
| JP3708762B2 (ja) | プラント運転監視方法とその装置 | |
| JP4468076B2 (ja) | 地図表示装置 | |
| Trindade et al. | DamAR: Augmented reality in dam safety control | |
| JP3082267B2 (ja) | 3次元図形指示装置 | |
| CN112146656B (zh) | 一种基于增强现实的室内导航可视化方法 | |
| JP5401027B2 (ja) | パイプラインの保守管理システム | |
| Muthalif et al. | Resolving perceptual challenges of visualizing underground utilities in mixed reality | |
| Wang | Improving human-machine interfaces for construction equipment operations with mixed and augmented reality | |
| Seibert | Augmenting reality by using uncalibrated optical tracking | |
| JPH0981779A (ja) | 部分立体モデルの作成方法及び装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| N231 | Notification of change of applicant | ||
| AMND | Amendment | ||
| A201 | Request for examination | ||
| AMND | Amendment | ||
| E902 | Notification of reason for refusal | ||
| AMND | Amendment | ||
| E601 | Decision to refuse application | ||
| AMND | Amendment | ||
| J201 | Request for trial against refusal decision | ||
| B701 | Decision to grant | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20171227 Year of fee payment: 4 |
|
| FPAY | Annual fee payment |
Payment date: 20190103 Year of fee payment: 5 |