いくつかの例示的な実装形態によれば、様々な図面における同様の参照符号は、同様の要素を示す。加えて、要素のための第1の数字の後に文字またはハイフンおよび第2の数字を続けることによって、その要素の複数のインスタンスが示され得る。たとえば、要素110の複数のインスタンスは、110-1、110-2、110-3などとして、または110a、110b、110cなどとして示され得る。第1の数字のみを使用して、そのような要素を指すとき、その要素のいずれかのインスタンスが理解されるべきである(たとえば、前の例における要素110は、要素110-1、110-2、および110-3、または要素110a、110b、および110cを指すようになる)。
次に、いくつかの例示的な実施形態について、本明細書の一部を形成する添付の図面に関して説明する。本開示の1つまたは複数の態様が実装され得る特定の実施形態について、以下で説明するが、他の実施形態が使用されることがあり、様々な変更形態が、本開示の範囲または添付の特許請求の範囲の趣旨を逸脱することなく行われることがある。
本明細書で言及する「V2Xデバイス」、「V2X車両」、および「V2Xエンティティ」は、それぞれ、V2Xメッセージを送信および受信することが可能なデバイス、車両、およびエンティティを指す。同様に、「非V2X車両」および「非V2Xエンティティ」は、V2X通信に関与しないか、または関与することができない車両およびエンティティを指す。多数の実施形態が、「V2X車両」および「非V2X車両」について説明したが、多数の実施形態が、歩行者、サイクリスト、道路危険物、障害物、および/または他の交通関連物体などの非車両エンティティを含むように拡大され得ることは理解されよう。本明細書で一般に言及する場合、本明細書の実施形態において説明するようなセンサーによって検出された「物体」は、道路上または道路の近くであり得る、検出された車両または非車両物体を指すことがある。追加として、本明細書の実施形態は、V2X通信を対象とするが、代替実施形態が、交通関連通信の代替形態を対象とし得ることは理解されよう。当業者は、そのような変形形態を諒解されよう。
V2X通信では、1つのV2Xデバイスによって送信されたデータは、送信するV2Xデバイスのある距離内のV2Xデバイスのみに関連し得る。たとえば、交差点を横断しようと試みる車両は、交差点へのある近接度内の関連するデータのみを発見し得る。同様に、協調運転に参加している車両の場合、操作によって影響を受ける車両のみが、データが関連することを発見し得る。
述べたように、(5G NRの下での)V2Xは、距離ベースの通信制御をサポートする。より詳細には、指定された距離(本明細書では「V2X通信範囲」または単に「通信範囲」と呼ばれる)内の受信するV2Xデバイスが、送信するV2XデバイスからV2Xメッセージを受信する場合、受信するV2Xデバイスは、指定された範囲内にあるが、メッセージの復号に失敗した場合、否定応答(NAK)を送信するようになる。これによって、送信するV2Xデバイスがメッセージを再送信することが可能になる。この機構を通して、V2Xの受信信頼性が、指定された範囲内のV2Xデバイスのために高められ、下にあるV2X通信に依拠するデバイス操作のための性能が向上する。
追加として、V2X対応デバイスは、他のV2X車両、ならびにそれらに近接した非V2X車両(および他の物体)の、ロケーションおよび動き状態をよく知っていることがある。前者の場合、これは、他のV2Xデバイスからのメッセージまたはシグナリング、たとえば、V2Xデバイスまたは車両のロケーションを示す制御シグナリング、基本安全メッセージ(BSM:Basic Safety message)、または協調認識メッセージ(CAM:Cooperative Awareness Message)の受信によって決定され得る。後者の場合、これは、非V2X車両および他の物体の動き状態および/または他の性質を検出することが可能な車載センサーによって決定され得る。
本明細書で提供する実施形態は、V2Xデバイスのこの能力を活用して、V2Xメッセージのための通信範囲を動的に決定するために、非V2X車両および他の物体の性質を決定するために、車載センサーを使用する。いくつかの実施形態では、たとえば、V2Xデバイスは、検出された物体の1つまたは複数の性質を決定し、1つまたは複数の性質に基づいて、V2Xメッセージのための通信範囲を増大させて、検出された物体の1つまたは複数の性質を、近くのV2Xデバイスに通知する助けになることができる。この追加の情報は、ユーザの安全を保証するために考慮に入れられることが必要とされる任意の条件について、近くのV2Xデバイスにアラートすることができる。実施形態について、添付図を参照して、以下で説明する。
図1は、車両110によって使用され得る有用な情報を提供して、その中の搭乗者の安全を保証する助けになるように、V2X通信が車両110-1、110-2、110-3、および110-4(本明細書では、まとめておよび総称的に車両110と呼ばれる)によってどのように使用され得るかを示す助けになるように提供された、交通交差点100の俯瞰図を提供する図である。図1が、本明細書で提供する他の図の場合と同様に、非限定的な例として提供されることは理解されよう。当業者が諒解するように、V2X通信が有用であり得るシナリオの数は、この例をはるかに超えて拡大する。シナリオが、より多いまたはより少ない車両、異なるタイプの車両、ならびに非車両エンティティ(V2X通信可能であってもまたはそうでなくてもよい、RSU、脆弱な道路利用者(VRU:Vulnerable Road User)、道路危険物、および他の物体など)を含み得ることを理解されたい。
ここで、各車両110は、交差点100に接近中である。車両が交差点100に接近するにつれて、各車両110にとって、交差点100を通る安全なナビゲーションを保証する助けになるように、他の車両の各々のスピード、方向、およびロケーションを知ることが有用であり得る。最終的に、交差点100は、専用のRSUとの、または車両110自体の間のいずれかのV2X通信を使用して、車両の横断を管理し得る。しかしながら、そのような管理がない場合でも、他の車両110の性質のこの認識は、車両(たとえば、自律走行および/または半自律走行車両)および/またはそれらの運転者が安全に交差点100を通るようにナビゲートする助けになり得る。
図1では、送信する車両110-1から送られたV2Xメッセージの通信範囲120が示されている。(しかしながら、通信範囲120は、一例として示されており、必ずしも一定の縮尺で示されているとは限らないことが留意され得る。)すなわち、車両110-1は、送信する車両110-1の性質(ロケーション、スピード、方向など)について、近くの車両110にアラートするために、V2Xメッセージ(たとえば、BSM、CAMなど)を送信することが可能なV2Xデバイスを備える。述べたように、通信範囲120は、一般に、デバイスが所望の操作またはアクションに反応するために必要とされた時間によって規定される。この反応時間は、送信する車両110-1のスピード、ロケーションまでの距離(たとえば、交差点100までの送信する車両110-1の距離)、ならびに他のV2X車両との協調操作の場合、車両間のスピードおよび距離の関数である。いくつかの事例では、反応時間は、数秒程度であり得るが、他の事例では、状況に応じてより長くなるか、またはより短くなり得る。したがって、通信範囲120は、各状況に動的に対応する。
送信する車両110-1によって送られたV2Xメッセージは、通信範囲120の指示を含み得る。たとえば、通信範囲は、メッセージにおいて搬送され得るか、またはメッセージ送信に付随する下位レイヤシグナリングによって示され得る。述べたように、メッセージの通信が成功することを保証する助けになるように、V2Xは、ハイブリッド自動再送要求(HARQ)フィードバックに基づく距離の使用を実装し、通信範囲120内の車両110が、パケットを復号することができないことを示し、V2Xメッセージの再送信を促すことを可能にし得る。たとえば、図1では、受信する車両110-2が、V2Xデバイスを備え、通信範囲120の指示(たとえば、送信する車両110-1から送られたV2Xメッセージのための制御シグナリング)を復号することができるが、V2Xメッセージ中に含まれた情報のパケットを復号することができない場合、受信する車両110-2は、NAKを送信して、V2Xメッセージを再送信するように、送信する車両110-1に促すことができる。V2Xメッセージを受信する、通信範囲120の外側の他の車両(たとえば、車両110-3および110-4)は、V2Xメッセージを無視することを選ぶことができる。
図2は、図1と同様の、交差点100および車両110の俯瞰図を提供するが、いくつかの実施形態に従って、センサー情報に基づいて、拡張通信範囲210がどのように決定され得るかを示す図である。拡張通信範囲210は、送信する車両110-1によって決定され得、任意の様々なシナリオにおいて有利であり得、それらのシナリオは、送信する車両110-1が、近くのV2Xデバイスにとって気づいていることが有益であり得る、検出された物体の1つまたは複数の性質に関するセンサー情報を取得する場合を含む。V2X対応車両は、一般に、大量のセンサーデータへのアクセスを有し、したがって、送信する車両110-1は、検出された物体の様々な性質のうちのいずれかを決定することが可能であり得る。
図2では、検出された物体は、検出された車両110-5を備える。いくつかの実施形態によれば、検出された車両110-5は、非V2X車両を備え得るか、または現在無効にされているV2Xデバイスを備え得る。いずれの場合も、送信する車両110-1は、センサーデータを使用して、検出された車両110-5がV2Xメッセージを送信中でないと決定することが可能であり得る。このセンサーデータは、送信する車両110-1によって、拡張通信範囲210を決定するために使用され得る。
基本的な一例として、送信する車両110-1は、検出された車両110-5の1つまたは複数の性質に関するセンサーデータを取得することができる。1つまたは複数の性質(以下でより詳細に説明する)に基づいて、送信する車両110-1は、拡張通信範囲210のための距離を決定し、受信する車両(たとえば、110-3)が、送信する車両110-1によるアクションに対するより大きい反応時間(および、したがって、110-5に対する適切な反応時間)を有することを可能にすることができる。いくつかの実施形態では、検出された車両110-5の1つまたは複数の性質が、送信する車両110-1によって、拡張通信範囲210を決定するために使用され得るのみではなく、送信する車両110-1はまた、これらの性質について他のV2Xデバイスにアラートするために、V2Xメッセージにおいてこれらの性質を送信し得る。したがって、そのような実施形態では、送信する車両110-1は、非V2X車両のV2X関連情報を事実上中継することができる。
述べたように、送信する車両110-1は、V2Xデバイスを備えるので、大量のセンサーデータへのアクセスを有し得る。センサーデータは、1つまたは複数のカメラ、LIDAR、レーダーなど、送信する車両110-1自体に位置する1つまたは複数のセンサーから取得され得る。とはいえ、センサーデータは、必ずしも、送信する車両110-1上のセンサーからのデータに限定されるとは限らないことがある。
いくつかの実施形態によれば、送信する車両110-1は、他のV2Xデバイスから受信されたセンサー情報を使用し得る。たとえば、検出された車両110-5は、別の車両110-6の1つまたは複数のセンサーによって検出され得、別の車両110-6は、送信する車両110-1によって受信された1つまたは複数のV2Xメッセージにおいて、センサー情報(またはそこから導出された、検出された車両110-5の検出された性質)を送信する。次いで、送信する車両110-1は、この情報を使用して、拡張通信範囲210を使用して、検出された車両110-5に関する新しいメッセージを送信し、他のV2Xデバイス(たとえば、V2X対応である場合、車両110-3)が、検出された車両110-5に関する情報を受信することができるようにし得る。したがって、送信する車両110-1は、別の車両110-6から送られたメッセージを受信していないことがあるV2Xデバイスに、検出された車両110-5に関する情報を中継する。センサー情報は、必ずしも車載センサーに限定されるとは限らないことがあることが留意され得る。センサー情報は、RSU、VRUなど、非車両V2Xデバイスによって中継され得る。
検出された車両110-5の性質は、送信する車両110-1によって、拡張通信範囲210を決定するために使用され、前に示したように、送信する車両110-1から送られたV2Xメッセージ中に含まれ得る。これらの性質は、検出された車両110-5を検出するために使用されたセンサーのタイプに応じて変動し得る。これらの性質は、概して、検出された車両のロケーションおよび動き状態に関する情報を含み得る。より詳細には、これらは、(たとえば、送信する車両110-1、交差点100などに対する)検出された車両の絶対および/または相対ロケーション、速度(または、別個にスピードおよび/または方向成分)、加速度などを含み得る。いくつかの実施形態では、他の検出された性質は、車両タイプ、1つまたは複数の検出された目に見える特徴などを含み得る。
他の状況では、送信する車両110-1は、非車両の検出された物体に関するセンサー情報に基づいて、拡張通信範囲210を決定し得る。これらの物体は、たとえば、VRU(歩行者、サイクリストなど)、道路危険物、およびより多くのものを含み得る。そのような事例では、同様の情報が、拡張通信範囲210を決定するために使用され得、かつ/または送信する車両110-1から送られたV2Xメッセージ中に含まれ得る。この場合も、この情報は、検出された物体のロケーションおよび動き状態を含み得る。いくつかの実施形態では、物体タイプなどの他の情報も同様に使用され得る。
所望の機能に応じて、送信する車両110-1は、様々な方法のうちのいずれかにおいて、拡張通信範囲210を決定するために、検出された車両110-5の検出された1つまたは複数の性質を使用することができる。概して、拡張通信範囲210は、送信する車両110-1のロケーションおよび動き状態に基づく初期通信範囲(たとえば、図1に示された通信範囲120)で開始し得、次いで、検出された1つまたは複数の性質がいくつかの条件を満たすか否かに基づいて増大した。
検出された車両110-5のロケーションは、たとえば、いくつかの条件下で拡張通信範囲210を決定するために使用され得る。いくつかの実施形態では、拡張通信範囲210は、単に、送信する車両110-1のための初期通信範囲、プラス、送信する車両110-1と検出された車両110-5との間の距離220に基づいて決定され得る。(送信する車両110-1以外の)他の物体に対する、検出された車両110-5のロケーションもまた、考慮事項であり得る。前記のように、たとえば、初期通信範囲120は、交差点への送信する車両110-1の近接度に部分的に基づき得る(たとえば、通信範囲120は、交差点に接近する他の車両(110-3および110-4)がV2Xメッセージを受信することを保証する助けになるように、拡大され得る)。実施形態によれば、送信する車両110-1は、拡張通信範囲210を決定するとき、交差点100への検出された車両110-5の近接度(または、工事ゾーン、危険ゾーン、もしくは拡張通信範囲を同様に保証し得る他の交通特徴)を考慮に入れ得る。したがって、送信する車両110-1は、交差点100(または、他の交通特徴)のロケーションに関するマップおよび/または他の情報を利用し得る。同様に、送信する車両110-1は、RSUへの検出された車両110-5の近接度を考慮に入れ得、次いで、RSUは、交差点100(または、他の交通特徴)のために、センサー測定値を調整し、かつ/または歩行者横断、交通信号変化などについて計画することができる。
いくつかの実施形態では、速度もまた、所望の機能に応じて、様々な方法のうちのいずれかにおいて考慮され得る。たとえば、送信する車両110-1および検出された車両110-5が、図2に示されているように位置する(同じ方向に進行中であり、送信する車両110-1の前に検出された車両110-5がある)場合、検出された車両110-5のスピードは、検出された車両110-5が送信する車両110-1よりも遅いスピードにおいて進行中である場合、拡張通信範囲210の距離に影響を及ぼさないことがある。一方、検出された車両110-5がより速いスピードにおいて進行中である場合、拡張通信範囲210の距離が増大され得る。ここでも、検出された車両110-5の相対スピードおよびロケーションが考慮に入れられ得るように、車両間の距離220が関与し得る。検出された車両110-5が、送信する車両110-1とは反対方向に、および/または交差点100から離れるように移動中(たとえば、車両110-6のように位置し、移動中)である場合、検出された車両110-5は、拡張通信範囲210の距離に影響を及ぼさないことがある。
いくつかの実施形態では、送信する車両110-1および/または検出された車両110-5の移動方向は、拡張通信範囲210を決定するとき、考慮に入れられ得る。たとえば、送信する車両110-1または検出された車両110-5が、特定の方向に進行中である場合、拡張通信範囲210は、後ろよりも、送信する車両110-1または検出された車両110-5の前のより遠くであり得る。したがって、拡張通信範囲210は、送信する車両110-1の周りで円を形成しないことがあり(たとえば、代わりに、楕円形状を形成し)、かつ/または送信する車両110-1は、拡張通信範囲210の中心に位置しないことがある。その上、いくつかの実施形態によれば、この拡張通信範囲210の境界もまた、V2Xメッセージ内で通信されることがあり、かつ/または、通信範囲内のV2Xメッセージの適切な通信を保証するために、ビームフォーミングが行われ得る。
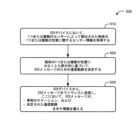
図3は、一実施形態による、本明細書で説明するような拡張通信範囲210を決定するために使用される構成要素の基本的アーキテクチャのブロック図である。これらの構成要素は、アプリケーションレイヤ320および無線レイヤ330をもつV2Xデバイス310、センサー処理ユニット340、ならびに1つまたは複数のセンサー350を備える。当業者は諒解するように、図3に示された構成要素は、ハードウェアおよび/またはソフトウェア構成要素を備えることがあり、以下で示されるように、異なるデバイスによって実行され得る。
V2Xデバイス310は、センサー情報を取得すること、それに基づいて拡張通信範囲を決定すること、および拡張通信範囲を有するV2Xメッセージを送信することを行うために使用される、デバイスまたは構成要素を備え得る。したがって、V2Xデバイス310は、送信するデバイス(たとえば、前に説明したような、図1~図2の車両110-1)に位置し、かつ/またはそれに組み込まれ得る。とはいえ、いくつかの実施形態は、車両のV2Xデバイスに限定されないことがある。および、したがって、V2Xデバイス310は、(たとえば、RSU、VRUなどにおいて)非車両の、V2X対応デバイスを備え得る。
V2Xデバイス310は、図4に示されており、以下で説明するものなど、ハードウェアおよびソフトウェア構成要素を備え得る。これらの構成要素は、図3に示されたアプリケーションレイヤ320および無線レイヤ330を実行することが可能な構成要素を含む。たとえば、アプリケーションレイヤは、V2Xデバイス310の処理ユニット410、DSP420、および/またはメモリ460によって実行されたソフトウェアアプリケーションによって実装され得、無線レイヤ330は、V2Xデバイス310のワイヤレス通信インターフェース430において実行されたソフトウェア(たとえば、ファームウェア)によって実装され得る。
V2Xデバイス310とは別個に示されているが、センサー処理ユニット340および/またはセンサー350は、いくつかの実施形態によれば、V2Xデバイス310に組み込まれ得る。たとえば、センサー350は、V2Xデバイス310のセンサー440を備えることがあり、かつ/またはセンサー処理ユニット340は、V2Xデバイス310の処理ユニット410および/もしくはDSP420によって実装され得る。この場合も、V2Xデバイス310のこれらおよび他のソフトウェアおよびハードウェア構成要素に関する追加の説明が、後で図4に関して提供される。
要するに、アプリケーションレイヤ320は、それにおいて、センサーベースの通信範囲(たとえば、図2の拡張通信範囲210)が、センサー処理ユニット340を介して提供されるセンサー350(たとえば、カメラ、レーダー、LIDARなどを備える)からの入力に基づいて決定され得る、レイヤであり得る。センサー処理ユニット340は、センサー350からのセンサーデータを受信および処理することによって、センサーデータのための中央ハブとして働く、汎用または専用プロセッサを備え得る。いくつかの実施形態では、たとえば、センサー処理ユニット340は、より高次の情報を決定するために、センサー350からのセンサーデータを受信し、融合させることが可能であり得る。および、したがって、いくつかの実施形態では、センサー処理ユニット340は、V2Xデバイス310のアプリケーションレイヤ320に、センサー350によって検出された物体の1つまたは複数の性質(物体タイプ、ロケーション、速度、加速度など)を提供することができる。追加または代替として、生のセンサーデータがV2Xデバイス310に提供されることがあり、V2Xデバイス310は、この決定を行い得る。いくつかの実施形態では、したがって、センサー処理ユニット340の機能は、述べたように、V2Xデバイス310に統合され得る。いくつかの実施形態では、述べたように、センサー350は、V2Xデバイス310とは別個の車両もしくはデバイスに位置し、かつ/またはそれに統合され得る。いくつかの実施形態では、センサー処理ユニット340も、別個の車両またはデバイスに位置することができる。そのような事例では、センサー350とセンサー処理ユニット340との間の通信、および/またはセンサー処理ユニット340とV2Xデバイス310との間の通信は、ワイヤレス通信手段を介したものであり得る。
アプリケーションレイヤ320は、無線レイヤ330とセンサー350との間の媒介として働く。述べたように、アプリケーションレイヤ320は、センサー処理ユニット340を介して提供されるようなセンサーデータに基づいて、無線レイヤ330を介してV2Xデバイス310から送られたV2Xメッセージのための通信範囲を決定することができる。V2Xメッセージを送信するように構成されたハードウェアおよびソフトウェア構成要素の物理レイヤを備える、無線レイヤ330において、決定された通信範囲は、所望の範囲に基づくハイブリッド自動再送要求(HARQ)フィードバック距離として実装され得る。当業者は諒解するように、HARQフィードバック距離を示すパラメータは、V2Xメッセージ自体の中に含まれ得るか、またはHARQフィードバック距離を示すパラメータは、V2Xメッセージに付随するか、もしくはそれを示すシグナリング、たとえば、サイドリンク制御情報中に含まれ得る。したがって、いくつかの実施形態では、決定された通信範囲は、V2Xメッセージまたは対応するシグナリングにおいて、HARQフィードバック距離を示すパラメータを含めることによって実装され得る。
しかしながら、HARQフィードバック距離は、決定された通信範囲と同じではないことがあることが留意され得る。いくつかの実施形態では、たとえば、HARQフィードバック距離は、あるマージンに対応するために、決定された通信範囲よりもわずかに大きくなり得る。したがって、いくつかの実施形態は、決定された通信範囲をHARQフィードバック距離に変換またはマッピングするための技法を利用し得る。これらは、たとえば、ある割合または最小距離だけ、決定された通信範囲を増大することを含み得る。別の例では、HARQフィードバック距離の指示は、制限を有し(たとえば、限られた数の量子化された距離のみが示され得る)、決定された通信範囲は、量子化された距離のうちの1つにマッピングされる。
いくつかの実施形態によれば、無線レイヤ330はまた、アプリケーションレイヤ320によって決定され、無線レイヤに渡された通信範囲に基づいて、適切な変調およびコーディング方式(MCS)を決定するためにも使用され得る。当業者は諒解するように、無線レイヤ330は、V2Xメッセージを送信するために、MCSの異なる順序を使用し得る。一般的に言えば、より複雑なコーディング方式(より高次のMCS)が、より短い範囲において使用され得るのに対して、所望の範囲がより長い場合、より基本的なコーディング方式が使用される。適切なMCS選択が、効率的なスペクトル使用を保証する助けになるように使用され得る。
図4は、本明細書の上記で説明したように利用され得る、V2Xデバイス310の一実施形態のブロック図である。いくつかの実施形態では、V2Xデバイス310は、車両のナビゲーションおよび/または自動運転に関する1つまたは複数のシステムを管理すること、ならびに他の車載システムおよび/または他の交通エンティティと通信することを行うために使用される、車両コンピュータシステムを備えるか、またはそれに統合され得る。いくつかの実施形態では、V2Xデバイス310は、車両(または、他のV2Xエンティティ)上のスタンドアロンデバイスまたは構成要素を備えることがあり、そのスタンドアロンデバイスまたは構成要素は、その車両(または、エンティティ)の他の構成要素/デバイスと通信可能に結合され得る。
述べたように、V2Xデバイス310は、図3に示されたアプリケーションレイヤ320および無線レイヤ330を実装し得、また、後で説明する、図5の方法500の機能のうちの1つまたは複数を実行し得る。図4は様々な構成要素の一般化された例示を提供することが意図されているにすぎず、それらの構成要素のいずれかまたはすべては適宜に利用され得ることに留意されたい。いくつかの事例では、図4によって示された構成要素は、単一の物理デバイスに配置され得、かつ/または、たとえば、車両上の異なる物理的ロケーションに位置し得る、様々なネットワーク化されたデバイスの間で分散され得ることが留意され得る。
V2Xデバイス310は、バス405を介して電気的に結合され得る(または適宜、別様に通信し得る)ハードウェア要素を備えるように示されている。ハードウェア要素は、限定はしないが、1つもしくは複数の汎用プロセッサ、1つもしくは複数の(デジタル信号処理(DSP)チップ、グラフィックアクセラレーションプロセッサ、特定用途向け集積回路(ASIC)などの)専用プロセッサ、および/または他の処理構造もしくは手段を含み得る、処理ユニット410を含み得る。図4に示されているように、いくつかの実施形態は、所望の機能に応じて、別個のデジタル信号プロセッサ(DSP)420を有し得る。(図3に示され、前に説明したような)センサー処理ユニット340が、V2Xデバイス310に統合される実施形態では、処理ユニット410は、センサー処理ユニット340を備え得る。
V2Xデバイス310はまた、1つまたは複数の入力デバイス470を含み得、入力デバイス470は、ユーザインターフェースに関するデバイス(たとえば、タッチスクリーン、タッチパッド、マイクロフォン、ボタン、ダイヤル、スイッチなど)、および/またはナビゲーション、自動運転などに関するデバイスを含み得る。同様に、1つまたは複数の出力デバイス415は、(たとえば、ディスプレイ、発光ダイオード(LED)、スピーカーなどを介して)ユーザと対話することに関し、かつ/またはナビゲーション、自動運転などに関するデバイスであり得る。
V2Xデバイス310はまた、ワイヤレス通信インターフェース430も含み得、ワイヤレス通信インターフェース430は、限定はしないが、モデム、ネットワークカード、赤外線通信デバイス、ワイヤレス通信デバイスおよび/またはチップセット(Bluetooth(登録商標)デバイス、IEEE802.11デバイス、IEEE802.15.4デバイス、Wi-Fiデバイス、WiMAXデバイス、WANデバイス、および/または様々なセルラーデバイスなど)などを備え得る。(そのような通信の例は、図6において提供され、以下でより詳細に説明する。)ワイヤレス通信インターフェース430は、V2Xデバイス310が他のV2Xデバイスに通信することを可能にすることができ、(前記のように)図3に示され、上記で説明した無線レイヤ330を実装して、決定された通信範囲を用いてV2Xメッセージを送信するために使用され得る。ワイヤレス通信インターフェース430を使用する通信は、ワイヤレス信号434を送り、かつ/または受信する、1つまたは複数のワイヤレス通信アンテナ432を介して行われ得る。
V2Xデバイス310は、センサー440をさらに含み得る。センサー440は、限定はしないが、1つまたは複数の慣性センサーおよび/または他のセンサー(たとえば、加速度計、ジャイロスコープ、カメラ、磁力計、高度計、マイクロフォン、近接度センサー、光センサー、気圧計など)を備え得る。センサー440は、たとえば、ロケーション、速度、加速度など、車両のいくつかのリアルタイム特性を決定するために使用され得る。物体を検出するために使用されたセンサーデータが、V2Xデバイス310とともに車両(または、他のV2Xエンティティ)上でコロケートされるセンサーから受信される事例では、図4に示されたセンサー440は、(図3に示され、前に説明した)センサー350を含み得る。
V2Xデバイス310の実施形態はまた、(アンテナ432と同じであり得る)アンテナ482を使用して、1つまたは複数のGNSS衛星から信号484を受信することが可能な、全地球航法衛星システム(GNSS)受信機480も含み得る。GNSS信号測定値に基づく測位は、V2Xデバイスの現在のロケーションを決定するために利用され得、検出された物体のロケーションを決定するための基礎としてさらに使用され得る。GNSS受信機480は、従来の技法を使用して、全地球測位システム(GPS)および/または同様の衛星システムなど、GNSSシステムのGNSS衛星から、V2Xデバイス310の位置を抽出することができる。
V2Xデバイス310は、メモリ460をさらに備え、かつ/またはメモリ460と通信中であり得る。メモリ460は、限定はしないが、ローカルおよび/またはネットワークアクセス可能ストレージ、ディスクドライブ、ドライブアレイ、光記憶デバイス、プログラマブル、フラッシュ更新可能であり得るランダムアクセスメモリ(RAM)および/または読取り専用メモリ(ROM)などのソリッドステート記憶デバイスなどを含み得る。そのような記憶デバイスは、限定はしないが、様々なファイルシステム、データベース構造などを含む、任意の適切なデータストアを実装するように構成され得る。
V2Xデバイス310のメモリ460はまた、オペレーティングシステム、デバイスドライバ、実行可能ライブラリ、および/または1つもしくは複数のアプリケーションプログラムなどの他のコードを含む、(図4には示されていない)ソフトウェア要素も備えることができ、1つまたは複数のアプリケーションプログラムは、様々な実施形態によって提供されたコンピュータプログラムを備え得、かつ/または本明細書で説明する方法を実装すること、および/もしくは本明細書で説明するシステムを構成することを行うように設計され得る。メモリ460内に記憶され、処理ユニット410によって実行されるソフトウェアアプリケーションは、図3に示され、前に説明したアプリケーションレイヤ320を実装するために使用され得る。その上、本明細書で説明する方法に関して説明する1つまたは複数の手順は、以下で説明する図5の方法500に示された機能を含む、V2Xデバイス310(および/または、V2Xデバイス310内の処理ユニット410もしくはDSP420)によって実行可能である、メモリ460内のコードおよび/または命令として実装され得る。一態様では、次いで、そのようなコードおよび/または命令は、説明する方法に従って1つまたは複数の動作を実行するように汎用コンピュータ(または、他のデバイス)を構成し、かつ/または適合させるために使用され得る。
図5は、実施形態による、V2Xメッセージのための通信範囲のセンサーベース決定の、V2Xデバイスにおける方法500のフロー図である。代替実施形態は、図5に示されたブロックにおいて記載された機能を組み合わせること、分離すること、またはさもなければ変動させることによって、機能において変動し得る。図5に示されたブロックのうちの1つまたは複数の機能を実行するための手段は、図4に示され、上記で説明したV2Xデバイス310など、V2Xデバイスのハードウェアおよび/またはソフトウェア構成要素を備え得る。
ブロック510において、機能は、V2Xデバイスにおいて、1つまたは複数のセンサーによって検出された物体の1つまたは複数の性質に関するセンサー情報を取得することを含む。前に説明した実施形態に示されているように、物体は、その性質が近くのV2Xデバイスの判断に情報を与え得る、任意の交通関連物体を備え得る。これは、たとえば、第2の車両、道路危険物、またはVRUを含み得る。さらに、1つまたは複数の性質は、物体のロケーション、物体の移動方向、物体の加速度、物体の速度、もしくは物体の物体タイプ、またはそれらの任意の組合せを含み得る。
ブロック510における機能を実行するための手段は、バス405、処理ユニット410、センサー440、メモリ460、ワイヤレス通信インターフェース430、ならびに/または図3に示され、前に説明したV2Xデバイス310の他のソフトウェアおよび/もしくはハードウェア構成要素など、V2Xデバイスの1つまたは複数のソフトウェアおよび/またはハードウェア構成要素を含み得る。
ブロック520において、機能は、物体の1つまたは複数の性質に少なくとも部分的に基づいて、V2Xメッセージのための通信範囲を決定することを含む。図2に関して説明したように、たとえば、検出された物体のロケーションおよびスピードが、通信範囲(拡張通信範囲210)を決定するために使用され得る。さらに述べたように、この決定は、V2Xデバイス310のアプリケーションレイヤ320において行われ得る。および、したがって、ブロック520における機能を実行するための手段は、バス405、処理ユニット410、メモリ460、ならびに/または図3に示され、前に説明したV2Xデバイス310の他のソフトウェアおよび/もしくはハードウェア構成要素など、V2Xデバイスの1つまたは複数のソフトウェアおよび/またはハードウェア構成要素を含み得る。
ブロック530において、機能は、V2Xデバイスから、V2Xメッセージをワイヤレスに送信することであって、ここにおいて、V2Xメッセージが、車両のロケーション、および決定された通信範囲を示す情報を備える、ことを含む。いくつかの実施形態では、V2Xメッセージは、物体の1つまたは複数の性質をさらに備え得る。車両のロケーション、および決定された通信範囲は、受信するV2Xデバイスが、それら自体のロケーションに基づいて、送信するV2Xデバイスの決定された範囲内に位置するか否かを決定することを可能にすることができる。V2Xメッセージは、V2Xデバイスの無線レイヤ(たとえば、図3の無線レイヤ330)によって送信され得る。および、述べたように、決定された通信範囲は、HARQフィードバック距離として、V2Xメッセージまたはその付随するシグナリングにおいて反映され得る。したがって、いくつかの実施形態では、決定された通信範囲を示す情報は、HARQフィードバック距離を備える。
ブロック530における機能を実行するための手段は、バス405、処理ユニット410、メモリ460、ワイヤレス通信インターフェース430、ならびに/または図3に示され、前に説明したV2Xデバイス310の他のソフトウェアおよび/もしくはハードウェア構成要素など、V2Xデバイスの1つまたは複数のソフトウェアおよび/またはハードウェア構成要素を含み得る。
方法500の代替実施形態は、所望の機能に応じて、追加または代替の機能を含み得る。いくつかの実施形態では、検出された物体がV2Xメッセージを送信中でないとの初期決定があり、それによって、V2Xデバイスが、その代わりに、検出された物体の1つまたは複数の性質を送信することが可能になり得る。そのような事例では、方法500は、物体がしきい値時間期間(たとえば、物体がV2X対応であった場合、物体からのV2Xメッセージが予想されることになる時間ウィンドウ)内にV2Xメッセージを送信しなかったと決定することをさらに含み得る。さらに、そのような実施形態では、物体の1つまたは複数の性質に関するセンサー情報を取得することは、物体がしきい値時間期間内にV2Xメッセージを送信しなかったとの決定に応答したものであり得る。
特定の要件に従って、実質的な変更が行われ得ることは、当業者には明らかであろう。たとえば、カスタマイズされたハードウェアが使用される場合もあり、かつ/または、特定の要素は、ハードウェア、ソフトウェア(アプレットなどのポータブルソフトウェアを含む)、もしくは両方において実装される場合がある。さらに、ネットワーク入出力デバイスなどの他のコンピューティングデバイスへの接続が使用されてもよい。
図6~図8は、いくつかの実施形態による、V2Xメッセージのための通信範囲のセンサーベース決定のための本明細書で提供する技法を実装するために使用され得る、システム、構造的デバイス、車両構成要素、ならびにV2X通信に関する他のデバイス、構成要素、およびシステムの図である。
図6は、一実施形態による、車両が様々なネットワーク上で、様々なデバイス、車両、およびサーバと通信し得る、システムの図である。一実施形態では、V2X車両A680は、リンク623上でV2Xまたは他のワイヤレス通信トランシーバを使用して、V2Xまたはそれ以外の通信トランシーバ対応車両B690と通信して、たとえば、一実施形態では、車両間の相対測位、車線変更のため、または交差点の通過のためのネゴシエーションを実行し、GNSS測定値、車両ステータス、車両ロケーションおよび車両能力、測定データ、ならびに/または計算されたステータスなど、V2Xデータ要素を交換し、V2X能力データ要素においてカバーされないことがある他のV2X車両ステータスステップを交換し得る。一実施形態では、車両A680はまた、ネットワークを通して、車両B690と通信し得、たとえば、基地局620との間のワイヤレス信号622/624を介して、および/もしくはアクセスポイント630との間のワイヤレス信号632を介して、または1つもしくは複数の通信対応RSU625を介して通信し得、それらのいずれもが、特に、車両B690が共通プロトコルにおいて車両A680と直接通信することが可能でない一実施形態では、車両B690などの他の車両による使用のために、通信、情報を中継し、かつ/またはプロトコルを変換し得る。一実施形態では、RSUは、様々なタイプの路側ビーコン、交通および/または車両モニタ、交通制御デバイス、ならびにロケーションビーコンを備え得る。
一実施形態では、RSU625は、基地局620および/またはアクセスポイント630から、車両A680および/または車両B690との間で、ワイヤレスメッセージ、たとえば、基本安全メッセージ(BSM)、または協調認識メッセージ(CAM)、または他のV2Xメッセージを送り、受信するために、ワイヤレストランシーバ625Eを動作させるように構成された、プロセッサ625Aを有し得る。たとえば、ワイヤレストランシーバ625Eは、(たとえば、サイドリンク通信を使用する)車両とのV2X通信などの様々なプロトコルにおいて、ならびに/または、ワイヤレス通信ネットワーク上で通信するために様々なワイドエリアネットワーク(WAN)、ワイヤレスローカルエリアネットワーク(WLAN)、および/もしくはパーソナルエリアネットワーク(PAN)プロトコルを使用して、ワイヤレスメッセージを送り、かつ/または受信し得る。一実施形態では、RSU625は、ワイヤレストランシーバ625Eおよびメモリに通信可能に結合された1つまたは複数のプロセッサ625Aを含み得、交通制御ユニット625Cとして実行するために、ならびに/または、環境および路側センサー情報625Dを提供および/もしくは処理するために、またはそれと車両との間のGNSS相対ロケーションのためのロケーション参照として働くために、命令および/またはハードウェアを含み得る。一実施形態では、RSU625は、ネットワークインターフェース625B(および/またはワイヤレストランシーバ625E)を含み得、ネットワークインターフェース625B(および/またはワイヤレストランシーバ625E)は、一実施形態では、交通最適化サーバ665、車両情報サーバ655、および/または環境データサーバ640などの外部サーバと通信し得る。一実施形態では、ワイヤレストランシーバ625Eは、ワイヤレス通信リンク上で、ワイヤレスベーストランシーバサブシステム(BTS)、ノードB、または発展型ノードB(eノードB)、または次世代ノードB(gノードB)からのワイヤレス信号を送信または受信することによって、ワイヤレス通信ネットワーク上で通信し得る。一実施形態では、ワイヤレストランシーバ625Eは、WANトランシーバ、WLANトランシーバ、および/またはPANトランシーバの様々な組合せを備え得る。一実施形態では、ローカルトランシーバもまた、Bluetooth(登録商標)トランシーバ、ZigBeeトランシーバ、または他のPANトランシーバであり得る。ローカルトランシーバ、WANワイヤレストランシーバ、および/またはモバイルワイヤレストランシーバは、WANトランシーバ、アクセスポイント(AP)、フェムトセル、ホーム基地局、スモールセル基地局、ホームノードB(HNB)、ホームeノードB(HeNB)、または次世代ノードB(gノードB)を備えることがあり、ワイヤレスローカルエリアネットワーク(WLAN、たとえば、IEEE802.11ネットワーク)、ワイヤレスパーソナルエリアネットワーク(PAN、たとえば、Bluetoothネットワーク)、またはセルラーネットワーク(たとえば、LTEネットワーク、または次の段落において説明するものなどの他のワイヤレスワイドエリアネットワーク)へのアクセスを提供し得る。これらは、ワイヤレスリンク上でRSU625と通信し得るネットワークの例にすぎず、請求する主題は、この点について限定されないことを理解されたい。
RSU625は、GNSS測定値、センサー測定値、速度、ヘッディング、ロケーション、停止距離、優先度または緊急ステータス、および他の車両関連情報など、車両A680および/または車両B690からのロケーション、ステータス、GNSSおよび他のセンサー測定値、ならびに能力情報を受信し得る。一実施形態では、道路表面情報/ステータスなどの環境情報、天候ステータス、およびカメラ情報が収集され、ポイントツーポイントまたはブロードキャストメッセージングのいずれかを介して、車両と共有され得る。RSU625は、車両A680および/または車両B690から、ワイヤレストランシーバ625Eを介して受信された情報と、環境および路側センサー625Dと、たとえば、交通制御および最適化サーバ665からのネットワーク情報および制御メッセージとを利用して、交通流を調整し、導き、車両A680および車両B690に、環境、車両、安全、および告知メッセージを提供し得る。
プロセッサ625Aは、ネットワークインターフェース625Bを動作させるように構成され得、一実施形態では、ネットワークインターフェース625Bは、バックホールを介してネットワーク670に接続され得、一実施形態では、都市もしくは都市のセクション内、または地域においてなど、エリアにおける交通の流れを監視および最適化する、集中型の交通制御および最適化サーバ665など、様々な集中型サーバと通信および協調するために使用され得る。ネットワークインターフェース625Bはまた、車両データのクラウドソーシング、RSU625の保守、および/または他のRSU625もしくは他のユーザとの協調のための、RSU625へのリモートアクセスのためにも利用され得る。RSU625は、交通制御ユニット625Cを動作させるように構成されたプロセッサ625Aを有し得、交通制御ユニット625Cは、近くの車両および環境のステータスおよびロケーションに関する、ロケーションデータ、停止距離データ、道路条件データ、識別データ、および他の情報など、車両A680および車両B690などの車両から受信されたデータを処理するように構成され得る。RSU625は、環境および路側センサー625Dからデータを取得するように構成されたプロセッサ625Aを有し得、環境および路側センサー625Dは、温度、天候、カメラ、圧力センサー、(たとえば、車検出のための)道路センサー、事故検出、移動検出、スピード検出、ならびに他の車両および環境監視センサーを含み得る。
一実施形態では、車両A680はまた、Bluetooth、Wi-Fi、もしくはZigbeeなどの短距離通信およびパーソナルネットワークを使用して、またはV2X(たとえば、CV2X/サイドリンク通信)、もしくは他の車両関連通信プロトコルを介して、モバイルデバイス600と通信して、たとえば、一実施形態では、WANおよび/もしくはWi-Fiネットワークにアクセスし、ならびに/または、一実施形態では、モバイルデバイス600からセンサーおよび/もしくはロケーション測定値を取得し得る。一実施形態では、車両A680は、WAN基地局620を介してなど、WANネットワークを通して、WAN関連プロトコルを使用して、またはピアツーピアで直接、もしくはWi-Fiアクセスポイントを介してのいずれかで、Wi-Fiを使用して、モバイルデバイス600と通信し得る。車両A680および/または車両B690は、様々な通信プロトコルを使用して通信し得る。一実施形態では、車両A680および/または車両B690は、たとえば、V2X、モバイル通信用グローバルシステム(GSM)、広帯域符号分割多元接続(WCDMA(登録商標))、符号分割多元接続,(CDMA)、高速パケットデータ(HRPD)、Wi-Fi、Bluetooth、WiMAX、LTE、5G新無線アクセス技術(NR)通信プロトコルなどを使用するなど、ワイヤレス通信の様々な複数のモードをサポートし得る。
一実施形態では、車両Aは、基地局620を介して、WANプロトコルを使用して、WANネットワーク上で、またはWi-FiなどのワイヤレスLANプロトコルを使用して、ワイヤレスLANアクセスポイント630と通信し得る。車両はまた、たとえば、WLAN、PAN(BluetoothまたはZigBeeなど)、デジタル加入者回線(DSL)またはパケットケーブルを使用するワイヤレス通信をサポートし得る。
車両A680および/または車両B690は、一実施形態では、ロケーション決定、時間取得、および時間維持のための、GNSS衛星610からの、GNSS信号612の受信のためのGNSS受信機480など、1つまたは複数のGNSS受信機を含み得る。様々なGNSSシステムは、Beidou、Galileo、全地球航法衛星システム(GLONASS)、および/または全地球測位システム(GPS)、ならびに、準天頂衛星システム(QZSS)およびNavICまたはインド地域航法衛星システム(IRNSS)などの様々な地域航法システムからの信号を受信するために、GNSS受信機480または他の受信機を使用して、単独でまたは組み合わせてサポートされ得る。一例では、1つもしくは複数のRSU625、1つもしくは複数のワイヤレスLANアクセスポイント630、または1つもしくは複数の基地局620などの、ビーコンに依存するものなど、他のワイヤレスシステムが利用され得る。様々なGNSS信号612が、ロケーション、速度、たとえば車両A680と車両B690との間などでの他の車両への近接度を決定するために、車センサーとともに利用され得る。
一実施形態では、車両Aおよび/または車両Bは、モバイルデバイス600によって提供されるようなGNSSを少なくとも部分的に使用して決定された、GNSS測定値および/またはロケーションにアクセスし得、モバイルデバイス600もまた、一実施形態では、GNSS、WAN、Wi-Fiならびに他の通信受信機および/またはトランシーバを有するようになる。一実施形態では、車両A680および/または車両B690は、GNSS受信機480が故障するか、またはしきい値レベル未満のロケーション精度を提供する場合に、フォールバックとして、モバイルデバイス600によって提供されるようなGNSSを少なくとも部分的に使用して決定された、GNSS測定値(擬似距離測定値、ドップラー測定値、および衛星IDなど)、および/またはロケーションにアクセスし得る。
車両A680および/または車両B690は、車両情報サーバ655、ルートサーバ645、ロケーションサーバ660、マップサーバ650、および環境データサーバ640など、ネットワーク上の様々なサーバにアクセスし得る。
車両情報サーバ655は、近くの車が適時に停止もしくは加速することが可能であるか否か、近くの車が自律走行運転されているか、自律走行運転対応であるか、通信対応であるかなど、近くの車に関する操作に関して判断を行う際に利用され得るような、アンテナロケーション、車両サイズ、および車両能力など、様々な車両を表す情報を提供し得る。一実施形態では、車両情報サーバ655はまた、車両サイズ、形状、能力、識別情報、所有権、占有、および/または決定されたロケーション点(たとえば、GNSS受信機のロケーションなど)、ならびに決定されたロケーション点に対する車境界のロケーションに関して、情報を提供し得る。
ルートサーバ645は、現在のロケーションおよび目的地情報を受信し、車両のためのルーティング情報、マップデータ、代替ルートデータ、ならびに/または交通および街路条件データを提供し得る。
ロケーションサーバ660は、一実施形態では、ロケーション決定能力、送信機信号取得支援(GNSS衛星軌道予測情報、時間情報、近似ロケーション情報、および/または近似時間情報など)、Wi-Fiアクセスポイントおよび基地局の識別情報およびそのためのロケーションを含むものなどのトランシーバアルマナック、ならびに、いくつかの実施形態では、スピード制限、交通、および道路ステータス/工事ステータスなど、ルートに関係する追加の情報を提供し得る。マップサーバ650は、道路ロケーション、道路に沿った関心ポイント、道路に沿った住所ロケーション、道路サイズ、道路スピード制限、交通条件、および/または道路条件(ぬれている、滑りやすい、雪に覆われている/凍っているなど)、道路ステータス(通行可能、工事中、事故など)などのマップデータを提供し得る。環境データサーバ640は、一実施形態では、天候および/もしくは道路関連情報、交通情報、地形情報、ならびに/または道路品質およびスピード情報、ならびに/または他の関連する環境データを提供し得る。
一実施形態では、図6における車両680および690、ならびにモバイルデバイス600は、ネットワーク670上のワイヤレスLANアクセスポイント630などの様々なネットワークアクセスポイント、またはワイヤレスWAN基地局620を介して、ネットワーク670上で通信し得る。車両680および690、ならびにモバイルデバイス600はまた、いくつかの実施形態では、Bluetooth、Zigbee、および5G新無線規格を介してなど、ネットワーク670上に行くことなく直接通信するための様々な短距離通信機構を使用して、デバイス間、車両間、ならびにデバイスから車両の間、および車両からデバイスの間で直接通信し得る。
図7は、一実施形態による、車両700の機能ブロック図を備える。述べたように、車両700は、V2Xデバイス310を備え得る。したがって、図7に示されたブロックを実行するための例示的なハードウェアおよび/またはソフトウェア構成要素は、図4に示されている。
図7に示されているように、車両700は、車両外部センサー702、車両内部センサー704、車両能力706、(環境から、他の車両から、RSUから、システムサーバからの)他の車両のロケーションおよびGNSS測定情報などの外部ワイヤレス情報708から、ならびに/または(現在および/または将来の動き状態を表す)車両動き状態710からの車両および環境情報を受信し得る。受信された車両、センサー、および環境情報は、一実施形態では、1つまたは複数のプロセッサ410、DSP420、およびメモリ460(図4に示されている)において処理され得、プロセッサ410、DSP420、およびメモリ460は、外部物体検知および分類と、予測および計画と、操作実行とを提供するために、ならびにGNSSデータ要素値を含む、V2Xまたは他のワイヤレスデータ要素値を決定し、更新するために、およびワイヤレス通信インターフェース430を介して、決定されたデータ要素を含むメッセージングを送信するために、接続および構成される。メッセージングおよびデータ要素は、SAEもしくは欧州電気通信標準化機構(ETSI)CV2Xメッセージ、および/またはワイヤレス通信インターフェース430によってサポートされた他のワイヤレスV2Xプロトコルを介してなど、様々な手段、プロトコル、および規格を介して送られ、かつ受信され得る。
車両間相対ロケーション決定ブロック728は、関心エリアにおける車両の相対ロケーションを決定するために使用され得る。一実施形態では、GNSSデータは、車両、またはRSUなどの他のデバイスと交換されて、他の車両またはデバイスに関連付けられた相対ロケーションの精度が決定および/または検証され、かつ/または高められる。一実施形態では、関心エリア内の車両(または、他のデバイス)を決定することは、車両間の近似相対ロケーションおよび/または近似範囲を決定するために、他の車両、他のデバイスからのメッセージにおいて受信されたブロードキャスト緯度および経度などのブロードキャストロケーション情報と、車両700についてのロケーション情報とを利用し得る。
一実施形態では、サーバ655、645、660、650、および640など、他の車両関連入力ソースは、車両情報、ルーティング、ロケーション支援、マップデータ、および環境データなどの情報を提供し得、操作実行726を決定するために、車両間操作協調724とともに使用される、他の入力、たとえば、道路ロケーションデータ、マップデータ、運転条件データ、および他の車両関連データ入力についての入力を提供し、かつ/またはそれらの他の入力を補完し、かつ/またはそれらの他の入力とともに使用され得る。一実施形態では、マップデータは、道路ロケーションに対する路側ユニットのロケーションを含み得、ここで、車両は、特に、他のシステムが視界不良の天候条件(雪、雨、砂嵐など)などのために故障し得る状況において、道路表面に対する測位を決定するために、マップデータと組み合わせて、RSUとの間の相対測位を利用し得る。一実施形態では、マップサーバ650からのマップデータは、近隣の車両から、および/またはRSU625からの相対および/または絶対データとともに利用されて、高信頼度の、複数の車両のための絶対ロケーションと、道路/マップに対する相対ロケーションとが決定され得る。たとえば、車両A680が、車両B690など、車両A680と通信中の他の車両よりも高精度/高信頼度のロケーションを有する場合、車両B690のシステムが、さもなければ特定の状況または環境において精度の高いロケーションを計算することができない場合でも、車両B690は、車両A680から車両B690に送られた精度の高い相対ロケーションおよび精度の高いロケーションのためのGNSS情報を使用して、車両B690のための精度の高いロケーションを決定し得る。この状況では、精度の高いロケーション決定システムをもつ車両Aの存在は、進行中の相対ロケーション情報とともに、1つまたは複数の精度の高いロケーションを共有することによって、すべての周囲の車両に利益を提供する。さらに、マップサーバ650からのマップデータが正確であると仮定すると、車両A680から車両B690などの周囲の車両に精度の高いロケーションデータを伝搬するための能力によって、周囲のデバイスが、別様に問題がある信号/ロケーション環境においても、マップデータに対してそれらの相対ロケーションを同じく正確に決定することが可能になる。車両情報サーバ655は、たとえば、車両Aまたは他の車両によって、車両A680上のGNSS受信機と、たとえば、車両B690との間の相対ロケーションのみでなく、車両A680および車両B690の最も近い点の間の距離も決定するために利用され得る、サイズ、形状、およびアンテナロケーションなどの車両情報を提供し得る。一実施形態では、交通制御および最適化サーバ665からの交通情報が、(一実施形態では)ルートサーバ645とともに使用される、全体的な経路選択および再ルーティングを決定するために利用され得る。一実施形態では、環境データサーバ640は、道路条件、薄氷、雪、道路上の水、ならびに、車両間操作協調ブロック724および操作実行ブロック726における判断および判断基準に同じく影響を及ぼし得る、他の環境条件についての入力を提供し得る。たとえば、凍っているかまたは雨の条件において、車両700は、隣接する車両からの車両間距離の増大を実行および/もしくは要求し得るか、または薄氷および静水などの道路危険条件を回避するルートオプションを選び得る。
ブロック728は、(再び、図4に示されているような)プロセッサ410および/もしくはDSP420、ならびにメモリ460を使用するなど、様々な専用もしくは汎用ハードウェアおよびソフトウェアを使用して、または、一実施形態では、専用センサー処理および/もしくは車両メッセージングコアなどの専用ハードウェアブロックにおいて実装され得る。いくつかの実施形態によれば、近くの車両のロケーションは、車両のためのブロードキャスト信号のラウンドトリップ時間、到達時間(TOA)、信号強度などの信号ベースのタイミング測定値、ならびに/または、近隣の車両からのブロードキャスト緯度および経度と、車両の現在のロケーションとに基づいて決定された距離などに基づいて、様々な手段を通して決定され得る。追加または代替として、近くの車両のロケーションは、光検出および測距(LIDAR)、無線検出および測距(RADAR)、SONAR、およびカメラ測定値などのセンサー測定値から決定され得る。一実施形態では、ブロック702、704、706、708、および/または710の一部または全部は、たとえば、性能を向上させ、測定レイテンシを低減するために、専用処理コアを有し得る。一実施形態では、ブロック702、704、706、708、および/または710の一部または全部は、ブロック728を伴う処理を共有し得る。
車両外部センサー702は、いくつかの実施形態では、カメラ、LIDAR、RADAR、近接度センサー、雨センサー、天候センサー、GNSS受信機480、およびそれらのセンサーとともに使用される受信データを備え得、受信データは、他の車両、デバイス、および一実施形態では、マップサーバ650、ルートサーバ645、車両情報サーバ655、環境データサーバ640、ロケーションサーバ660などのサーバから、ならびに/または車両A680などの車両内もしくはその近くに存在し得るモバイルデバイス600などの関連デバイスから受信され得るものなど、マップデータ、環境データ、ロケーション、ルート、および/または他の車両情報などである。たとえば、一実施形態では、モバイルデバイス600は、GNSS測定値の追加のソースを提供し得、動きセンサー測定値の追加のソースを提供し得、またはWAN、Wi-Fi、もしくは他のネットワークへの通信ポータルとして、ならびにサーバ640、645、650、655、660、および/もしくは665などの様々な情報サーバへのゲートウェイとして、ネットワークアクセスを提供し得る。
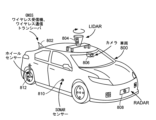
車両700は、1つまたは複数のカメラを含み得ることを理解されたい。一実施形態では、カメラは、前面、側面、背面、または視野において調節可能(回転可能なカメラなど)であり得る。図8に示されているように、たとえば、同じ面に向いている複数のカメラ806があり得る。たとえば、カメラ806、および808におけるバンパーに搭載されたカメラは、2つの前面カメラ、すなわち、駐車のためのより低い物体および/またはより低い視点(バンパーに搭載されたものなど)に焦点を合わせたもの、ならびに交通、他の車両、歩行者、およびより遠くの物体を追跡するためなど、より高い視点に焦点を合わせるものを備え得る。一実施形態では、他の車両と、外部のエンティティおよび物体との追跡を最適化するために、ならびに/またはセンサーシステムを互いに対して較正するために、様々な視野がスティッチされ得、かつ/または他の車両からのV2X入力などの他の入力に対して相関され得る。LIDAR804は、屋根に搭載され、回転中であり得るか、または特定の視点(前面、背面、側面など)に焦点を合わせられ得る。LIDAR804は、ソリッドステートまたは機械式であり得る。近接度センサーは、超音波、RADARベース、光ベース(赤外線距離測定などに基づく)、および/または容量性(表面タッチ指向(surface touch oriented)、または金属体の容量検出)であり得る。雨センサーおよび天候センサーは、気圧センサー、水分検出器、雨センサー、および/もしくは光センサーなどの様々な検知能力および技術を含み得、かつ/または他の既存のセンサーシステムを活用し得る。GNSS受信機は、車の屋根の後部におけるフィンアンテナアセンブリにおけるものなど、屋根に搭載されるか、フードもしくはダッシュボードに搭載されるか、またはさもなければ車両の外装もしくは内装内に配置され得る。
一実施形態では、車両内部センサー704は、タイヤ空気圧センサー、ブレーキパッドセンサー、ブレーキステータスセンサー、スピードメーター、および他のスピードセンサーなどのホイールセンサー812、磁力計および地磁気コンパスなどのヘッディングセンサーおよび/または方位センサー、オドメーターおよびホイールティックセンサーなどの距離センサー、加速度計およびジャイロなどの慣性センサー、ならびに個別に決定され得るような、または加速度計、ジャイロ、および/もしくはチルトセンサーなどの他のセンサーシステムを使用して決定されるような、上述のセンサーと、ヨーセンサー、ピッチセンサー、および/またはロールセンサーとを使用した慣性測位結果を備え得る。
車両内部センサー704と車両外部センサー702の両方は、共有または専用の処理能力を有し得る。たとえば、センサーシステムまたはサブシステムは、加速度計、ジャイロ、磁力計、および/または他の検知システムからの測定値および他の入力に基づいて、ヨー、ピッチ、ロール、ヘッディング、スピード、加速能力および/もしくは距離、ならびに/または停止距離などの車ステータス値を決定する、1つまたは複数のセンサー処理コアを有し得る。異なる検知システムは、測定値を決定するために互いに通信するか、または車両ロケーションを決定するために、ブロック728に値を送り得る。内部センサーおよび外部センサーからの測定値から導出された車ステータス値は、汎用またはアプリケーションプロセッサを使用して、他のセンサーシステムからの車ステータス値および/または測定値とさらに組み合わせられ得る。たとえば、ブロック728および/または724は、ワイヤレス通信インターフェース430を利用して、または他の通信トランシーバを介して送られ得る、V2Xメッセージングのためのデータ要素値を決定するために、専用または集中型プロセッサ上で実装され得る。一実施形態では、センサーは、関連システム、たとえば、LIDAR、RADAR、動き、ホイールシステムなどに分離され得、これらのシステムは、生の結果のための専用処理コアによって動作されて、各コアからの車ステータス値が出力され、それらの車ステータス値が組み合わせられ、解釈されて、能力データ要素およびステータスデータ要素を含む、組み合わせられた車ステータス値が導出され、それらの組み合わせられた車ステータス値が、車動作を制御するか、またはさもなければ車動作に影響を及ぼすために、ならびに/またはV2Xもしくは他のメッセージング能力を介して、他の車両および/もしくはシステムと共有されたメッセージングステップとして使用され得る。これらのメッセージング能力は、一実施形態では、ワイヤレス通信インターフェース430およびアンテナ432によってサポートされるものなど、様々なワイヤレス関連、光関連、または他の通信規格に基づき得る。
一実施形態では、車両能力706は、停止、ブレーキング、加速、および旋回半径、ならびに自律走行および/または非自律走行ステータスおよび/または能力のための性能推定値を備え得る。能力推定値は、一実施形態では、メモリにロードされ得る、記憶された推定値に基づき得る。これらの推定値は、特定の車両について、または1つもしくは複数の車両にわたる平均値についてのいずれかの経験的性能数(empirical performance number)、および/あるいは所与の性能数値(performance figure)のための1つまたは複数のモデルに基づき得る。複数のモデルのための性能推定値が平均されるか、またはさもなければ組み合わせられる場合、それらの性能推定値は、同様または共通の特徴に基づいて選ばれ得る。たとえば、同様または同じ重量、および同じまたは同様のドライブトレインをもつ車両は、ブレーキング/停止距離、旋回半径、および加速性能など、運転性能関連の推定値のための性能推定値を共有し得る。車両性能推定値はまた、たとえば、ネットワーク上の車両データサーバから、ワイヤレスネットワーク上で、外部V2X入力708を使用して取得され得る。このことは、ワイヤレス対応ではなく、車両情報を直接提供することができない車両についての情報を取得するために、特に有用である。一実施形態では、車両能力706はまた、タイヤの摩耗、タイヤブランド能力、ブレーキパッドの摩耗、ブレーキブランドおよび能力、ならびにエンジンステータスなど、車構成要素ステータスによっても影響され得る。一実施形態では、車両能力706はまた、スピード、ヘッディングなどの全体的な車ステータスによって、および道路表面、道路条件(ぬれている、乾いている、滑りやすさ/トラクション)、天候(風が吹いている、雨が降っている、雪が降っている、薄氷、つるつる滑る道路など)などの外部ファクタによっても影響され得る。多くの場合、摩耗、または他のシステム劣化、および天候、道路表面、道路条件などの外部ファクタは、性能推定値を低減、確認、または改善するために利用され得る。いくつかの実施形態では、車両停止距離、および/または距離ごとの加速時間を測定するなど、実際の測定された車両性能は、実際の車両運転関連性能に基づいて測定および/または推定され得る。一実施形態では、測定値に一貫性がない場合、より最近に測定された性能が、より古い測定値よりも重く重み付けされるか、または優先され得る。同様に、一実施形態では、車両外部センサー702および/または車両内部センサー704を介してなど、車両によって現在検出されるものと同じタイプの天候において、または同じタイプの道路表面上でなど、同様の条件の間に取られた測定値は、能力を決定する際に、より重く重み付けされ、かつ/または優先され得る。
V2X車両検知、予測、計画実行712は、入力ブロック702、704、706、708、および710からのデータを相関させ、確証し、かつ/または組み合わせるために、センサー融合および物体分類ブロック716を部分的に利用して、外部物体検知および分類ブロック714を介して、ブロック702、704、706、708、および710からの情報の受信および処理を扱う。ブロック714外部物体検知および分類は、物体が存在すると決定し、物体のタイプ(車、トラック、自転車、オートバイ、歩行者、動物など)、ならびに/または移動ステータス、近接度、ヘッディング、および/もしくは車両に対する位置などの、車両に対する物体ステータス、サイズ、脅威レベル、ならびに脆弱性優先度(歩行者は、たとえば、道路のごみに対してより高い脆弱性優先度を有するようになる)を決定する。一実施形態では、ブロック714は、他の車両に対する相対測位を決定するために、他の車両からのGNSS測定メッセージを利用し得る。ブロック714からのこの出力は、予測および計画ブロック718に提供され得、予測および計画ブロック718は、ブロック720を介して、検出された物体および車両、ならびにそれらの関連付けられた軌道を決定し、ブロック722において車両操作および経路計画を決定し、その出力が、ブロック726車両操作実行において直接、またはV2X車両間ネゴシエーションブロック724を介してのいずれかで利用され、V2X車両間ネゴシエーションブロック724は、他の車両から受信された操作計画、ロケーション、およびステータスを統合し、考慮することになる。V2X車両間ネゴシエーションは、近隣の車両のステータスを考慮し、近隣またはそれ以外の影響を受ける車両の間のネゴシエーションおよび協調を、車両優先度、車両能力(衝突を回避するために停止、減速、または加速する能力など)、および、いくつかの実施形態では、天候条件(雨が降っている、霧がかかっている、雪、風)、道路条件(乾いている、ぬれている、凍っている、滑りやすい)などの様々な条件に基づいて可能にする。これらは、たとえば、交差点に接近する車の間の、交差点を通過するためのタイミングおよび順序についてのネゴシエーション、隣接する車の間の車線変更についてのネゴシエーション、駐車スペースについてのネゴシエーション、1車線道路上で一方向に進行するため、または別の車両を追い越すためのアクセスについてのネゴシエーションを含む。車両間ネゴシエーションはまた、アポイントメントの時間、目的地の距離、および目的地に到着するまでの推定ルート時間など、時間ベースおよび/または距離ベースのファクタ、ならびに、いくつかの実施形態では、アポイントメントのタイプ、およびアポイントメントの重要度を含み得る。
図8は、前に説明した実施形態における方法において、サイドリンク/CV2X通信を使用して通信することが可能な、一実施形態による、例示的な車両800の斜視図である。ここでは、図4および以前の実施形態に関して説明した構成要素のうちのいくつかが示されている。図示のように、および前に説明したように、車両800は、バックミラーに搭載されたカメラ806、フロントフェンダーに搭載されたカメラ(図示せず)、サイドミラーに搭載されたカメラ(図示せず)、および後方カメラ(図示されていないが、典型的には、トランク、ハッチ、またはリアバンパー上にある)などのカメラを有することができる。車両800はまた、物体を検出し、それらの物体までの距離を測定するためのLIDAR804を有することもあり、LIDAR804は、屋根に搭載されることが多いが、複数のLIDARユニット804がある場合、LIDARユニット804は、車両の前、後ろ、および横の周りに向けられ得る。車両800は、GNSS受信機480(典型的には、図示のように、屋根の後部におけるシャークフィンユニットに位置する)、様々なワイヤレス通信インターフェース(WAN、WLAN、V2Xなどであるが、典型的には必ずしもシャークフィンに位置するとは限らない)802、RADAR808(典型的にはフロントバンパーにある)、およびSONAR810(存在する場合、典型的には、車両の両側に位置する)など、他の様々なロケーション関連システムを有し得る。様々なホイール812およびドライブトレインセンサーも存在することがあり、タイヤ空気圧センサー、加速度計、ジャイロ、ならびにホイール回転検出および/またはカウンタなどである。一実施形態では、LIDAR、RADAR、カメラ、GNSS、およびSONARなどの様々なセンサーを介して決定された距離測定値および相対ロケーションが、自動車のサイズおよび形状情報、ならびにセンサーのロケーションに関する情報と組み合わせられて、異なる車両の表面の間の距離および相対ロケーションが決定され得るので、センサーから別の車両まで、または2つの異なるセンサー(2つのGNSS受信機など)の間の距離またはベクトルが、各車両上のセンサーの位置を考慮するために、徐々に増大されるようになる。したがって、2つのGNSS受信機の間の正確なGNSS距離およびベクトルが、GNSS受信機に対する様々な車表面の相対ロケーションに基づいて修正されることが必要になる。たとえば、後ろの車のフロントバンパーと、先導車のリアバンパーとの間の距離を決定する際、その距離が、後続の車におけるGNSS受信機とフロントバンパーとの間の距離、および前の車のGNSS受信機と前の車のリアバンパーとの間の距離に基づいて調整されることが必要になる。たとえば、前の車のリアバンパーと後続の車のフロントバンパーとの間の距離は、2つのGNSS受信機の間の相対距離から、後ろの車のGNSS受信機からフロントバンパーまでの距離を引いて、前の車のGNSS受信機からリアバンパーまでの距離を引いたものである。このリストは、限定であるものではなく、図8は、V2X400を備える車両の一実施形態において、様々なセンサーの例示的なロケーションを提供するものであることが了解される。
添付図面を参照すると、メモリを含むことができる構成要素は、非一時的機械可読媒体を含むことができる。本明細書で使用する「機械可読媒体」および「コンピュータ可読媒体」という用語は、機械に特定の様式で動作させるデータを提供することに関与する任意の記憶媒体を指す。上記で提供した実施形態では、実行のために処理ユニットおよび/または他のデバイスに命令/コードを提供する際に、様々な機械可読媒体が含まれる場合がある。追加または代替として、機械可読媒体は、そのような命令/コードを記憶および/または携帯するために使用される場合がある。多くの実装形態では、コンピュータ可読媒体は、物理的および/または有形の記憶媒体である。そのような媒体は、限定はしないが、不揮発性媒体、揮発性媒体、および送信媒体を含む、多くの形態をとり得る。コンピュータ可読媒体の一般的な形態は、たとえば、磁気媒体および/もしくは光媒体、穴のパターンを有する任意の他の物理媒体、RAM、プログラマブルROM(PROM)、消去可能プログラマブルROM(EPROM)、フラッシュEPROM、任意の他のメモリチップもしくはメモリカートリッジ、以下で説明するような搬送波、またはコンピュータが命令および/もしくはコードを読み取ることができる任意の他の媒体を含む。
本明細書で説明した方法、システム、およびデバイスは、例である。様々な実施形態が、適宜、様々な手順または構成要素を省略し、置換し、または追加し得る。たとえば、いくつかの実施形態に関して説明した特徴を、様々な他の実施形態に組み合わせることができる。実施形態の異なる態様および要素は、同じように組み合わせることができる。本明細書に提供される図の様々な構成要素は、ハードウェアおよび/またはソフトウェアで具体化することができる。また、技術は進化し、したがって、要素の多くは、本開示の範囲をそれらの特定の例に限定しない例である。
主に一般的な用法という理由で、そのような信号をビット、情報、値、要素、シンボル、文字、変数、項、数字、数値などと呼ぶことは、時として好都合であることがわかっている。しかしながら、これらの用語または同様の用語のすべてが、適切な物理量に関連付けられるべきであり、便宜的な呼び方にすぎないことは理解されたい。別段に明記されていない限り、上の説明から明らかなように、本明細書全体にわたって、「処理する」、「算出する」、「計算する」、「決定する」、「確認する」、「識別する」、「関連付ける」、「測定する」、「実行する」などの用語を利用する説明は、専用コンピュータまたは同様の専用電子コンピューティングデバイスのような、特定の装置のアクションまたはプロセスを指すことを諒解されたい。したがって、本明細書の文脈では、専用コンピュータまたは同様の専用電子コンピューティングデバイスは、専用コンピュータまたは同様の専用電子コンピューティングデバイスのメモリ、レジスタ、もしくは他の情報記憶デバイス、送信デバイス、またはディスプレイデバイス内の物理的な電子量、電気量、または磁気量として一般に表される信号を操作または変換することが可能である。
本明細書で使用する「および」および「または」という用語は、そのような用語が使用される文脈に、少なくとも部分的に依存することがやはり予想される、様々な意味を含む場合がある。一般に、「または」がA、BまたはCなどのリストを関連付けるために使用される場合、ここで包含的な意味で使用されるA、B、およびCを意味し、ならびにここで排他的な意味で使用されるA、BまたはCを意味するものとする。加えて、本明細書で使用する「1つまたは複数」という用語は、単数の任意の特徴、構造もしくは特性について説明するために使用される場合があるか、または、特徴、構造もしくは特性の何らかの組合せについて説明するために使用される場合がある。しかしながら、これは例示的な例にすぎず、特許請求される主題がこの例に限定されないことに留意されたい。さらに、「のうちの少なくとも1つ」という用語は、A、B、またはCなどのリストを関連付けるために使用される場合に、A、AB、AA、AAB、AABBCCCなどの、A、B、および/またはCの任意の組合せを意味すると解釈され得る。
いくつかの実施形態について説明したが、本開示の趣旨を逸脱することなく、様々な変更形態、代替構成、および等価物が使用される場合がある。たとえば、上記の要素は、単により大きいシステムの構成要素であってよく、ここにおいて、他のルールが、様々な実施形態の適用例よりも優先するか、または様々な実施形態の適用例を別様に修正してよい。また、上記の要素が考慮される前、考慮される間、または考慮された後に、いくつかのステップに着手してもよい。したがって、上記の説明は本開示の範囲を限定しない。