JP7623909B2 - 試験装置及び試験環境パラメータの調整方法 - Google Patents
試験装置及び試験環境パラメータの調整方法 Download PDFInfo
- Publication number
- JP7623909B2 JP7623909B2 JP2021125878A JP2021125878A JP7623909B2 JP 7623909 B2 JP7623909 B2 JP 7623909B2 JP 2021125878 A JP2021125878 A JP 2021125878A JP 2021125878 A JP2021125878 A JP 2021125878A JP 7623909 B2 JP7623909 B2 JP 7623909B2
- Authority
- JP
- Japan
- Prior art keywords
- test
- adjustment
- determination unit
- normal
- test object
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Landscapes
- Testing Of Devices, Machine Parts, Or Other Structures Thereof (AREA)
Description
<試験装置の構成例>
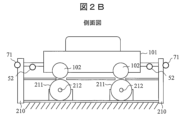
図1は、試験対象物100及び試験装置200の概略構成を示す模式図である。試験対象物100は、例えば、フレーム101及び車輪102を備える構造(例えば台車)であるが、車輪102を備えるものであればこれに限らない。試験装置200は、試験対象物100を試験するための装置である。また、試験装置200は、本明細書に記載される方法を実施することにより、試験対象物100の試験装置200に対する設置状態(試験環境)が正常であるか否かを判定し、異常がある場合に試験環境に関するパラメータ(試験環境パラメータ)を調整する。試験環境パラメータは、例えば、試験装置200に対する試験対象物100の設置位置を示すデータ及び試験装置200に対する試験対象物100の固定強度を示すデータなどを含む。本明細書において、試験環境パラメータを単に「パラメータ」と呼ぶ場合がある。また、本明細書において、試験対象物100と試験装置200との接続状態(試験環境)の「異常」は、試験対象物100の試験装置200への設置位置が所望の位置からずれている、又は試験対象物100の試験装置200への固定強度が所望の強度と異なる、といった状態に起因して生じる。一方、試験環境が「正常」であるとは、試験対象物100の試験装置200への設置位置が所望の位置にあり、固定強度が所望の強度である状態をいう。
図3は、試験環境パラメータの調整に関する試験装置200の機能ブロック図である。図3に示すように、CPU2は、調整パラメータ算出部21を有する。試験対象物100は、振動センサ71及び温度センサ72を有する。温度センサ72は、試験対象物100の温度を検出し、検出信号を試験装置200に出力する。以下において、振動センサ51及び油圧センサ52をまとめてセンサ5と呼び、振動センサ71及び温度センサ72をまとめてセンサ7と呼ぶ場合がある。
図4は、データベース64の構成方法の一例を示すフローチャートである。データベース64の構成は、例えば、試験装置200の出荷前、及び、試験装置200のユーザ側でデータベース64に学習させる際などにPLC1により実行することができる。なお、以下の処理は、CPU2で実行するようにしてもよい。
試験装置200の製造者又はユーザ(オペレータ)は、試験対象物100を試験装置200に接続し、入力装置3を用いて、データベース64の構成を開始するための指示を制御装置202に入力する。制御装置202のPLC1は、指示の入力を受け付けると、以下の処理を開始する。
PLC1は、車種判定のための運転(例えば等速運転)を開始する。このとき、PLC1は、センサ5及びセンサ7の検出信号の受け付けを開始する。車種判定のための試験装置200の運転時間は、例えば、本試験(所望の試験環境における試験対象物100の性能試験)における運転時間よりも短い時間とすることができる。
PLC1は、ステップS102において受信したセンサ5及びセンサ7の検出信号を、車種判定運転記録641として、ストレージ6に保存する。
PLC1は、試験対象物100の車種に関する情報(車種情報)を入力するためのGUI画面を生成して出力装置4に表示させ、オペレータによる車種情報の入力を受け付ける。車種情報は、例えば、試験対象物100の型式、名称及びIDなどのうち少なくともいずれか1つを含む。オペレータが入力装置3を用いて車種情報を入力すると、PLC1は、車種情報642としてストレージ6に保存する。このとき、PLC1は、車種情報642と車種判定運転記録641とを対応づけてストレージ6に保存する。
PLC1は、設置状態判定のための運転を開始する。設置状態判定のための運転の条件は、ステップS102における車種判定のための運転の条件と同じであってもよいし、例えば運転速度又は運転時間などを異ならせてもよい。本ステップにおける運転の間、PLC1は、センサ5及びセンサ7の検出信号を受け付ける。
PLC1は、ステップS105において受信したセンサ5及びセンサ7の検出信号を設置状態判定運転記録644として、車種情報642と対応づけてストレージ6に保存する。
オペレータは、設置状態判定運転中の試験対象物100及び試験装置200の状態(例えば揺れなど)と、センサ5及び7の出力信号の波形などを参照し、試験対象物100の設置状態が正常(合格)であるか否かを判断する。設置状態が合格である場合(Yes)、処理はステップS108に移行する。設置状態が不合格である場合(No)、処理はステップS111に移行する。
ステップS107においてオペレータが合格であると判定し、本試験を開始するための指示を制御装置202に入力すると、PLC1は、試験対象物100の本試験を開始する。本試験の間、PLC1は、センサ5及びセンサ7の検出信号を受け付ける。
PLC1は、ステップS108において受信したセンサ5及びセンサ7の検出信号を正常試験結果(正常・異常試験結果643)として、車種情報642と対応づけてストレージ6に保存する。
正常・異常試験結果643を保存後、データベース64の構成処理は終了する。
ステップS107においてオペレータが不合格であると判定した場合、試験対象物100と試験装置200との設置状態(例えば設置位置及び固定の強度などの試験環境パラメータ)を手動で調整する。調整後、オペレータが、試験環境の調整のための運転の開始指示を入力すると、PLC1は、試験装置200の運転を開始する。試験環境の調整のための運転の条件は、ステップS102及びS105における運転の条件と同じであってもよいし、例えば運転速度又は運転時間などを異ならせてもよい。本ステップにおける運転の間、PLC1は、センサ5及びセンサ7の検出信号を受け付ける。
PLC1は、ステップS111において受信したセンサ5及びセンサ7の検出信号をパラメータ調整運転記録645として、車種情報642と対応づけてストレージ6に保存する。
PLC1は、オペレータがステップS111において調整したパラメータの調整量を入力するためのGUI画面を出力装置4に表示させ、オペレータによるパラメータ調整操作の入力を受け付ける。オペレータが入力装置3を用いてパラメータ調整操作を入力すると、PLC1は、パラメータ調整操作を調整操作記録646としてストレージ6に保存する。このとき、PLC1は、車種情報642と調整操作記録646とを対応づけてストレージ6に保存する。
オペレータは、パラメータ調整運転中の試験対象物100及び試験装置200の状態と、センサ5及び7の出力信号の波形などを参照し、試験対象物100の設置状態が正常状態に移行したか否か(合格になったか否か)を判断する。設置状態が合格となった場合(Yes)、処理はステップS108に移行し、本試験を実施する。設置状態が不合格のままである場合(No)、処理はステップS115に移行する。
PLC1は、ステップS111において受信したセンサ5及びセンサ7の検出信号を異常試験結果(正常・異常試験結果643)として、車種情報642と対応づけてストレージ6に保存する。
図5は、試験環境パラメータの調整方法を示すフローチャートである。試験環境パラメータの調整は、例えば、ユーザ側で試験対象物100の性能の本試験を実施する前に、CPU2の調整パラメータ算出部21により実行される。
調整パラメータ算出部21は、試験対象物100が試験装置200に設置されたことを確認し、プログラムを実行することにより試験環境パラメータの調整を開始する。
調整パラメータ算出部21は、車種判定のための運転(例えば等速運転)を開始する。このとき、調整パラメータ算出部21は、センサ5及びセンサ7の検出信号の受け付けを開始する。
調整パラメータ算出部21は、試験対象物分類器61を用いて、センサ5及び7の検出信号及び車種情報642に基づいて、試験対象物100の車種を判定する。調整パラメータ算出部21は、判定した車種を不図示のメモリに格納する。なお、未知の車種であった場合は、調整パラメータ算出部21は、データベース64の車種判定運転記録641及び車種情報642に新たなデータを追加する。
調整パラメータ算出部21は、ステップS13で判定した車種に応じた設置状態判定器62を呼び出す。このように車種に応じて設置状態を判定することで、精度よく設置状態を判定することができる。
調整パラメータ算出部21は、設置状態判定のための運転を開始する。本ステップにおける運転の間、調整パラメータ算出部21は、センサ5及びセンサ7の検出信号を受け付ける。なお、上記ステップS13で未知の車種と判定された場合は、調整パラメータ算出部21は、本ステップにおけるセンサ5及びセンサ7の検出信号を、データベース64の設置状態判定運転記録644に新たなデータとして追加する。
調整パラメータ算出部21は、ステップS15で取得したセンサ5及びセンサ7の検出信号から、設置状態の特徴量を算出する。
調整パラメータ算出部21は、ステップS16で算出した設置状態の特徴量を、ステップS14で呼び出した設置状態判定器62の入力として、試験対象物100の設置状態を判定する。このとき設置状態判定器62は、入力された特徴量が、正常試験結果の特徴量の正常空間内にあるかどうかにより、設置状態が正常か否かを判定し、調整パラメータ算出部21に出力する。あるいは、設置状態判定器62は、入力された特徴量と正常空間との差分が、所定の閾値未満である場合に正常であると判定し、差分が所定の閾値以上の場合に異常であると判定するようにしてもよい。設置状態が合格である場合(Yes)、処理はステップS18に移行する。設置状態が不合格である場合(No)、処理はステップS21に移行する。
設置状態が合格である(正常に試験対象物100が設置されている)と判定された場合、パラメータの調整は不要であるので、調整パラメータ算出部21は、試験対象物100の本試験を開始する。そして、本試験終了後、処理は終了する。
設置状態が不合格である(試験対象物100の設置に異常がある)と判定された場合、調整パラメータ算出部21は、異常種類分類器631を用いて、異常の原因(試験装置200及び試験対象物100のどの箇所に異常があるか)を特定する。このとき異常種類分類器631は、例えば、入力された特徴量が、異常の原因ごとに分類された異常試験結果(異常空間)のどれに近いかに基づいて異常の原因を特定することができる。なお、異常の原因の特定方法は、上記の手法に限定されない。
調整パラメータ算出部21は、異常種類分類器631を用いて、パラメータの調整方法を判定する。このとき異常種類分類器631は、ステップS21で特定された異常の原因に基づいて調整が必要なパラメータを特定し、当該パラメータの調整量を算出する。このとき、パラメータの調整を何段階で行うかを決定してもよい。
調整パラメータ算出部21は、ステップS23で特定された調整が必要なパラメータを調整する。このとき、調整パラメータ算出部21は、パラメータの調整量を示すデータをPLC1に出力する。PLC1は、パラメータの調整量を示すデータを受信すると、試験対象物100若しくは試験装置200の位置、試験対象物100の固定強度などを調整するように、不図示のアクチュエータ等を駆動する。この操作を実施することで、非熟練者が調整操作を実施している場合であっても、自動で適切にパラメータの調整が可能である。
調整パラメータ算出部21は、パラメータを調整した後に試験装置200を運転した場合のセンサ5及び7の検出信号の特徴量を、異常収束判定器632を用いて算出する。
調整パラメータ算出部21は、異常収束判定器632を用いて、ステップS24で算出した特徴量が正常空間(正常試験結果)に収束するかどうかを判定する(予測する)。特徴量が正常空間に収束する場合(Yes)、処理はステップS26に移行する。特徴量が正常空間に収束しない(発散する)場合(No)、処理はステップS28に移行する。
なお、ステップS23におけるパラメータの調整を一度実施しただけでは、本ステップで特徴量が正常空間への収束に向かっているかを判定することが難しい場合がある。したがって、所定の回数(2回以上)、ステップS23~ステップS24を繰り返した後で、特徴量の時系列から、正常空間への収束に向かっているかを判定するようにしてもよい。
調整パラメータ算出部21は、異常収束判定器632を用いて、特徴量が正常空間内に移行したか否かを判定する。特徴量が正常空間内に移行した場合(Yes)、処理はステップS27に移行する。特徴量が収束し正常空間内に移行していない場合(No)、処理はステップS23に戻り、同様にステップS23~26を実施する。
特徴量が正常空間に移行した場合、適切な試験環境パラメータとなったため、調整パラメータ算出部21はパラメータ調整を終了し、ステップS18に移行して本試験を開始する。
パラメータを調整しても特徴量が収束しない(正常空間から離れる)場合、調整パラメータ算出部21は、本試験を開始することなく処理を終了する。このとき、調整パラメータ算出部21は、異常が収束しないことを示すアラーム(警報)を出力装置4から出力する。アラームには、オペレータによる手動の調整を促すテキスト、又は、パラメータの調整をはじめから(ステップS11から)再度行うことを促すテキストなどを含めてもよい。オペレータにより手動で調整された場合、調整パラメータ算出部21は、調整量を入力するためのGUI画面を生成して出力装置4に表示させてもよく、オペレータによる入力を受け付けると、調整操作記録646を更新する。このように、異常が解消しないことをオペレータに知らせて手動で調整させることにより、特徴量が収束しない場合の対応方法を異常種類分類器631に学習させることができる。結果として、今後のパラメータ調整の精度を向上することができる。
以上のように、本実施形態の試験装置200は、回転する車輪102を備える試験対象物100と試験装置200との設置状態を含む試験環境を検出するセンサ5及び7と、試験装置200の運転時に取得されるセンサ5及び7の検出信号に基づいて、試験環境パラメータを調整する制御装置202と、を備える。制御装置202は、試験環境が正常な場合の過去の運転時に取得されたセンサ5及び7の検出信号に基づく正常空間(正常・異常試験結果643)を、車種情報642と対応づけて記憶するデータベース64を有する。
本開示は、上述した実施形態に限定されるものでなく、様々な変形例を含んでいる。例えば、上述した実施形態は、本開示を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備える必要はない。また、ある実施形態の一部を他の実施形態の構成に置き換えることができる。また、ある実施形態の構成に他の実施形態の構成を加えることもできる。また、各実施形態の構成の一部について、他の実施形態の構成の一部を追加、削除又は置換することもできる。
200…試験装置
201…装置本体
202…制御装置
1…PLC
2…CPU
3…入力装置
4…出力装置(出力部)
5、7…センサ
6…ストレージ
21…調整パラメータ算出部(パラメータ調整部、終了部、移行部)
61…試験対象物分類器(種類判定部)
62…設置状態判定器(試験環境判定部)
64…データベース(記憶部)
631…異常種類分類器(調整方法判定部)
632…異常収束判定器(第1の収束判定部、第2の収束判定部)
641…車種判定運転記録
642…車種情報
643…正常・異常試験結果
644…設置状態判定運転記録
645…パラメータ調整運転記録
646…調整操作記録
Claims (8)
- 回転する車輪を備える試験対象物を試験するための試験装置であって、
前記試験対象物と前記試験装置との設置状態を含む試験環境を検出するセンサと、
前記試験装置の運転時に取得される前記センサの検出信号に基づいて、前記試験環境に関するパラメータを調整する制御装置と、を備え、
前記制御装置は、
前記試験環境が正常な場合の過去の運転時に取得された前記センサの検出信号に基づく正常空間を、前記試験対象物の種類と対応づけて記憶する記憶部と、
前記試験装置に設置された試験対象物の種類を判定する種類判定部と、
前記試験装置の現在の運転時に取得される前記センサの検出信号から第1の特徴量を算出し、前記第1の特徴量と、前記判定した試験対象物の種類に対応する前記正常空間との比較により前記試験環境が正常であるか異常であるかを判定する試験環境判定部と、
前記異常の原因を特定して、前記パラメータの調整方法を判定する調整方法判定部と、
前記判定された調整方法に基づいて前記パラメータを調整するパラメータ調整部と、
前記パラメータの調整後における運転時の前記センサの検出信号から第2の特徴量を算出し、前記第2の特徴量が前記正常空間に収束するか否かを判定する第1の収束判定部と、
前記第1の収束判定部において前記第2の特徴量が前記正常空間に近づいたと判定された場合、前記第2の特徴量が前記正常空間内に移行したか否かを判定する第2の収束判定部と、
前記第1の収束判定部において前記第2の特徴量が前記正常空間に近づいていないと判定された場合、前記パラメータの調整を終了する終了部と、
前記第2の収束判定部において前記第2の特徴量が前記正常空間内に移行したと判定された場合、前記試験対象物の本試験に移行する移行部と、を備える試験装置。 - 前記制御装置は、
前記第1の収束判定部において前記第2の特徴量が前記正常空間に近づいていないと判定された場合に、当該判定の結果を示す警報を出力する出力部をさらに備えることを特徴とする請求項1に記載の試験装置。 - 前記記憶部は、
前記試験環境が異常である場合の過去の運転時の前記センサの検出信号に基づく異常空間と、
過去に調整された前記パラメータに関する情報と、をさらに記憶し、
前記調整方法判定部は、
前記異常空間に基づいて前記異常の原因を分類し、前記過去に調整された前記パラメータに関する情報に基づいて前記調整方法を判定することを特徴とする請求項1に記載の試験装置。 - 前記記憶部は、
前記過去に調整された前記パラメータに関する情報を、当該過去の調整時の調整量と紐づけて記憶することを特徴とする請求項3に記載の試験装置。 - 前記過去に調整された前記パラメータに関する情報は、当該過去の調整の前後の運転時における前記センサの検出信号を含むことを特徴とする請求項3に記載の試験装置。
- 前記記憶部、前記種類判定部、前記試験環境判定部、前記パラメータ調整部、前記第1の収束判定部、前記第2の収束判定部、前記終了部及び前記移行部は、前記試験装置側に保存され、前記調整方法判定部が、前記試験装置と通信可能な外部のサーバに保存されることを特徴とする請求項4に記載の試験装置。
- 前記サーバが、フェデレーテッドラーニングにより前記調整方法判定部を更新するよう構成されることを特徴とする請求項6に記載の試験装置。
- 回転する車輪を備える試験対象物を試験するための試験装置の制御装置により実行される、前記試験対象物と前記試験装置との設置状態を含む試験環境に関するパラメータの調整方法であって、
前記制御装置は、
前記試験環境が正常な場合の過去の運転時に取得された、前記試験環境を検出するセンサの検出信号に基づく正常空間を、前記試験対象物の種類と対応づけて記憶する記憶部を有し、
前記方法は、
前記試験装置に設置された試験対象物の種類を判定することと、
前記試験装置の現在の運転時に取得される前記センサの検出信号から第1の特徴量を算出し、前記第1の特徴量と、前記判定した試験対象物の種類に対応する前記正常空間との比較により前記試験環境が正常であるか異常であるかを判定することと、
前記異常の原因を特定して、前記パラメータの調整方法を判定することと、
前記判定された調整方法に基づいて前記パラメータを調整することと、
前記パラメータの調整後における運転時の前記センサの検出信号から第2の特徴量を算出し、前記第2の特徴量が前記正常空間に収束するか否かを判定することと、
前記第2の特徴量が前記正常空間に近づいたと判定された場合、前記第2の特徴量が前記正常空間内に移行したか否かを判定することと、
前記第2の特徴量が前記正常空間に近づいていないと判定された場合、前記パラメータの調整を終了することと、
前記第2の特徴量が前記正常空間内に移行したと判定された場合、前記試験対象物の本試験に移行することと、を含む、パラメータの調整方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021125878A JP7623909B2 (ja) | 2021-07-30 | 2021-07-30 | 試験装置及び試験環境パラメータの調整方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021125878A JP7623909B2 (ja) | 2021-07-30 | 2021-07-30 | 試験装置及び試験環境パラメータの調整方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023020491A JP2023020491A (ja) | 2023-02-09 |
| JP7623909B2 true JP7623909B2 (ja) | 2025-01-29 |
Family
ID=85159034
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021125878A Active JP7623909B2 (ja) | 2021-07-30 | 2021-07-30 | 試験装置及び試験環境パラメータの調整方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7623909B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117970055B (zh) * | 2024-02-08 | 2024-11-05 | 北京新雨华祺科技有限公司 | 一种用于环保陶瓷镀银孔板的高压测试系统 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005274135A (ja) | 2004-03-22 | 2005-10-06 | Horiba Ltd | 車両の試験装置 |
| JP2005345396A (ja) | 2004-06-07 | 2005-12-15 | Horiba Ltd | 車両固定装置 |
| US20100170330A1 (en) | 2007-05-31 | 2010-07-08 | Nederlandse Organisatie Voor Toegepast- Natuurwetenschappelijk Onderzoek Tno | System And Method For Testing A Vehicle |
| JP2013156232A (ja) | 2012-02-01 | 2013-08-15 | A & D Co Ltd | 車両拘束装置及び車両試験方法 |
| JP2019100974A (ja) | 2017-12-07 | 2019-06-24 | 東芝三菱電機産業システム株式会社 | 車両固定システム |
-
2021
- 2021-07-30 JP JP2021125878A patent/JP7623909B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005274135A (ja) | 2004-03-22 | 2005-10-06 | Horiba Ltd | 車両の試験装置 |
| JP2005345396A (ja) | 2004-06-07 | 2005-12-15 | Horiba Ltd | 車両固定装置 |
| US20100170330A1 (en) | 2007-05-31 | 2010-07-08 | Nederlandse Organisatie Voor Toegepast- Natuurwetenschappelijk Onderzoek Tno | System And Method For Testing A Vehicle |
| JP2013156232A (ja) | 2012-02-01 | 2013-08-15 | A & D Co Ltd | 車両拘束装置及び車両試験方法 |
| JP2019100974A (ja) | 2017-12-07 | 2019-06-24 | 東芝三菱電機産業システム株式会社 | 車両固定システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023020491A (ja) | 2023-02-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2344855B1 (en) | Methods and systems for off-line control for simulation of coupled hybrid dynamic systems | |
| EP3206103B1 (en) | Model based system monitoring | |
| EP3775801B1 (en) | Method and apparatus for detecting vibrational and/or acoustic transfers in a mechanical system | |
| CN103597417B (zh) | 状态监测方法及装置 | |
| KR102818732B1 (ko) | 음향 방출 시험을 위한 방법 및 장치 | |
| US11828732B1 (en) | Audio sensor based vehicle fault diagnostics system | |
| GB2507934A (en) | Method, device and computer program for detecting occurrence of abnormality | |
| JP7623909B2 (ja) | 試験装置及び試験環境パラメータの調整方法 | |
| US8688309B2 (en) | Active and stateful hyperspectral vehicle evaluation | |
| JP4808924B2 (ja) | タイヤのユニフォーミティの解析・制御方法 | |
| US20200019853A1 (en) | Product testing system with auxiliary judging function and auxiliary testing method applied thereto | |
| JP2002073703A (ja) | 車両の振動解析方法および振動解析プログラムを記録した媒体 | |
| KR102218146B1 (ko) | 연성 하이브리드 동적 시스템의 시뮬레이션을 위한 오프라인 제어 방법 및 시스템 | |
| JP2018096753A (ja) | データ処理方法、タイヤの評価方法、車両の振動乗り心地性能の評価方法、及びデータ処理装置 | |
| KR102470520B1 (ko) | 국제표준(sae j1739) 기반의 잠재적 고장 영향 분석 방법 | |
| EP3044563B1 (en) | Method of off-line hybrid system assessment for test monitoring and modification | |
| JP7272853B2 (ja) | アコースティックエミッション試験のための方法及び装置 | |
| CN110779566B (zh) | 具有辅助判断功能的产品测试系统及产品测试辅助方法 | |
| JP2015044484A (ja) | タイヤの振動を予測する装置、方法及びコンピュータプログラム | |
| CN119643173A (zh) | 针对nvh试验的控制方法、系统、存储介质和电子设备 | |
| Liu et al. | Suspension vibration and transfer path analysis | |
| WO2025187768A1 (ja) | 解析装置 | |
| CN120509261A (zh) | 一种叶片气动激励验证方法、装置、电子设备及存储介质 | |
| CN115711753A (zh) | 一种汽车轮胎高速均匀性的预测方法 | |
| CN116842735A (zh) | 一种背门异响测试评价方法、装置及计算机可读存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240219 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240828 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240903 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241010 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250117 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7623909 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |