JP7614359B2 - シミュレーション装置 - Google Patents
シミュレーション装置 Download PDFInfo
- Publication number
- JP7614359B2 JP7614359B2 JP2023537821A JP2023537821A JP7614359B2 JP 7614359 B2 JP7614359 B2 JP 7614359B2 JP 2023537821 A JP2023537821 A JP 2023537821A JP 2023537821 A JP2023537821 A JP 2023537821A JP 7614359 B2 JP7614359 B2 JP 7614359B2
- Authority
- JP
- Japan
- Prior art keywords
- visual sensor
- sensor model
- model
- unit
- measurement object
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1671—Programme controls characterised by programming, planning systems for manipulators characterised by simulation, either to verify existing program or to create and verify new program, CAD/CAM oriented, graphic oriented programming systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1602—Programme controls characterised by the control system, structure, architecture
- B25J9/1605—Simulation of manipulator lay-out, design, modelling of manipulator
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40323—Modeling robot environment for sensor based robot system
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Manipulator (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Processing Or Creating Images (AREA)
Description
図1は、本実施形態に係るシミュレーション装置1の構成を示すブロック図である。図1に示すように、シミュレーション装置1は、制御部11と、記憶部12と、表示部13と、操作部14と、を備える。
操作部14は、マウス、キーボード等で構成され、各種の入力を受け付ける。
計測対象物モデル配置部112は、仮想空間内に計測対象物を三次元的に表現した計測対象物モデルを配置する。
計測箇所指定部114は、計測対象物モデルにおいて1以上の計測箇所を指定する。計測箇所指定部114は、例えば、操作部14の操作に従って、計測対象物モデルにおいて1以上の任意の計測箇所を指定する。
センサ姿勢指定部117は、例えば、操作部14の操作に従って、視覚センサモデルを計測箇所の上方に配置する際の姿勢を指定する。
距離指定部118は、例えば、操作部14の操作に従って、視覚センサモデルと計測箇所との距離を指定する。
位置決定部120は、測定箇所の位置に基づいて、視覚センサモデルの画像サイズ内に含まれる視覚センサモデル位置を、視覚センサモデルの配置位置として決定する。
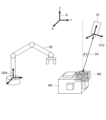
図2から図10は、第1実施形態に係るシミュレーション装置1の処理を示す図である。図2は、第1実施形態に係る仮想空間内のロボットモデルR1、視覚センサモデルV1及び計測対象物モデルW1を示す図である。
図11から図19は、第2実施形態に係るシミュレーション装置1の処理を示す図である。第2実施形態は、計測対象物モデルW2の計測箇所M2が立体的な形状を有している点が第1実施形態とは異なる。
図20は、第1実施形態及び第2実施形態に共通するシミュレーション装置1の処理の流れを示すフローチャートである。
ステップS1において、仮想空間作成部111は、作業空間を三次元的に表現した仮想空間を作成する。
また、他の実施形態に係るシミュレーション装置1は、オペレータの操作に従って以下のような機能を実行する制御部11を備えてもよい。すなわち、制御部11は、作業空間を三次元的に表現した仮想空間において、計測対象物を三次元的に表現した計測対象物モデルにおいて1以上の計測箇所を指定する。
11 制御部
12 記憶部
13 表示部
14 操作部
111 仮想空間作成部
112 計測対象物モデル配置部
113 ロボットモデル配置部
114 計測箇所指定部
115 視覚センサモデル配置部
116 撮像領域指定部
117 センサ姿勢指定部
118 距離指定部
119 位置変換部
120 位置決定部
121 ロボット姿勢算出部
122 シミュレーション実行部
Claims (9)
- 作業空間を三次元的に表現した仮想空間を作成する仮想空間作成部と、
前記仮想空間内に計測対象物を三次元的に表現した計測対象物モデルを配置する計測対象物モデル配置部と、
前記計測対象物モデルにおいて計測箇所を指定する計測箇所指定部と、
前記計測対象物を撮像する視覚センサを三次元的に表現した視覚センサモデルを任意の視覚センサモデル位置に配置する視覚センサモデル配置部と、
前記計測箇所の位置に基づいて、前記視覚センサモデルの画像サイズ内に含まれる前記視覚センサモデル位置を、前記視覚センサモデルの配置位置として決定する位置決定部と、
前記視覚センサモデルの画像サイズ内で、前記視覚センサモデルによって前記計測箇所が撮像される撮像領域を指定する撮像領域指定部と、
を備えるシミュレーション装置。 - 前記視覚センサモデル位置において、前記計測箇所の三次元位置を、前記視覚センサモデルにより前記計測箇所を撮像した場合の二次元位置に変換する位置変換部を更に備え、
前記位置決定部は、全ての前記二次元位置が前記視覚センサモデルの画像サイズ内に含まれる前記視覚センサモデル位置を、前記視覚センサモデルの配置位置として決定する、
請求項1に記載のシミュレーション装置。 - 前記仮想空間内にロボットを三次元的に表現したロボットモデルを配置するロボットモデル配置部と、
前記視覚センサモデルが前記ロボットモデルに取り付けられている場合、前記視覚センサモデルの配置位置における前記ロボットモデルの姿勢を算出するロボット姿勢算出部と、
を更に備える請求項1又は2に記載のシミュレーション装置。 - 前記視覚センサモデルを前記計測箇所の上方に配置する際の姿勢を指定するセンサ姿勢指定部を更に備える請求項1から3のいずれか一項に記載のシミュレーション装置。
- 前記視覚センサモデルと前記計測箇所との距離を指定する距離指定部を更に備える請求項1から4のいずれか一項に記載のシミュレーション装置。
- 作業空間を三次元的に表現した仮想空間を作成する仮想空間作成部と、
前記仮想空間内に計測対象物を三次元的に表現した計測対象物モデルを配置する計測対象物モデル配置部と、
前記計測対象物モデルにおいて計測箇所を指定する計測箇所指定部と、
前記計測対象物を撮像する視覚センサを三次元的に表現した視覚センサモデルを任意の視覚センサモデル位置に配置する視覚センサモデル配置部と、
前記計測箇所の位置に基づいて、前記視覚センサモデルの画像サイズ内に含まれる前記視覚センサモデル位置を、前記視覚センサモデルの配置位置として決定する位置決定部と、
前記視覚センサモデルを前記計測箇所の上方に配置する際の姿勢を指定するセンサ姿勢指定部と、
を備え、
前記センサ姿勢指定部は、前記仮想空間の基準平面に対して、前記視覚センサモデルの光軸が垂直になる姿勢を基準として前記視覚センサモデルの座標系周りの角度を指定する、シミュレーション装置。 - 作業空間を三次元的に表現した仮想空間を作成する仮想空間作成部と、
前記仮想空間内に計測対象物を三次元的に表現した計測対象物モデルを配置する計測対象物モデル配置部と、
前記計測対象物モデルにおいて計測箇所を指定する計測箇所指定部と、
前記計測対象物を撮像する視覚センサを三次元的に表現した視覚センサモデルを任意の視覚センサモデル位置に配置する視覚センサモデル配置部と、
前記計測箇所の位置に基づいて、前記視覚センサモデルの画像サイズ内に含まれる前記視覚センサモデル位置を、前記視覚センサモデルの配置位置として決定する位置決定部と、
前記視覚センサモデル位置において、前記計測箇所の三次元位置を、前記視覚センサモデルにより前記計測箇所を撮像した場合の二次元位置に変換する位置変換部と、
を備え、
前記位置決定部は、全ての前記二次元位置が前記視覚センサモデルの画像サイズ内に含まれる前記視覚センサモデル位置を、前記視覚センサモデルの配置位置として決定し、
前記位置決定部は、全ての前記二次元位置が前記視覚センサモデルの画像サイズ内に含まれる前記視覚センサモデルの位置が複数存在する場合、前記計測箇所が前記視覚センサモデルの画像に最も大きく写る位置を、前記視覚センサモデルの配置位置として決定する、シミュレーション装置。 - 前記位置変換部は、前記視覚センサモデルの前記視覚センサモデル位置、前記視覚センサモデルのレンズの焦点距離、前記視覚センサモデルの撮像素子の1ピクセルあたりの長さ及び前記視覚センサモデルのレンズの中心位置を含む撮像条件を使用して、前記計測箇所の三次元位置を、前記視覚センサモデルにより前記計測箇所を撮像した場合の前記二次元位置に変換する、請求項2に記載のシミュレーション装置。
- 作業空間を三次元的に表現した仮想空間において、計測対象物を三次元的に表現した計測対象物モデルにおいて計測箇所を指定し、
前記計測対象物を撮像する視覚センサを三次元的に表現した視覚センサモデルを任意の視覚センサモデル位置に配置するための入力操作を受け付け、
前記視覚センサモデルの画像サイズ内に含まれる前記視覚センサモデル位置を、前記視覚センサモデルの配置位置として決定するための入力操作を受け付け、前記視覚センサモデルの画像サイズ内で、前記視覚センサモデルによって前記計測箇所が撮像される撮像領域を指定するための入力操作を受け付ける機能を実行する制御部を備えるシミュレーション装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/027920 WO2023007621A1 (ja) | 2021-07-28 | 2021-07-28 | シミュレーション装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2023007621A1 JPWO2023007621A1 (ja) | 2023-02-02 |
| JP7614359B2 true JP7614359B2 (ja) | 2025-01-15 |
Family
ID=85087661
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023537821A Active JP7614359B2 (ja) | 2021-07-28 | 2021-07-28 | シミュレーション装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US12440967B2 (ja) |
| JP (1) | JP7614359B2 (ja) |
| CN (1) | CN117279749A (ja) |
| DE (1) | DE112021007545T5 (ja) |
| TW (1) | TW202305749A (ja) |
| WO (1) | WO2023007621A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005135278A (ja) | 2003-10-31 | 2005-05-26 | Fanuc Ltd | シミュレーション装置 |
| JP2006010312A (ja) | 2004-06-21 | 2006-01-12 | Constec Engi Co | 撮像装置 |
| JP2008021092A (ja) | 2006-07-12 | 2008-01-31 | Fanuc Ltd | ロボットシステムのシミュレーション装置 |
| JP2011065399A (ja) | 2009-09-17 | 2011-03-31 | Fujitsu Ltd | シミュレーション装置,シミュレーション方法およびシミュレーションプログラム |
| JP2015136781A (ja) | 2014-01-24 | 2015-07-30 | ファナック株式会社 | ワークを撮像するためのロボットプログラムを作成するロボットプログラミング装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4153528B2 (ja) * | 2006-03-10 | 2008-09-24 | ファナック株式会社 | ロボットシミュレーションのための装置、プログラム、記録媒体及び方法 |
| JP5897624B2 (ja) * | 2014-03-12 | 2016-03-30 | ファナック株式会社 | ワークの取出工程をシミュレーションするロボットシミュレーション装置 |
| JP7233858B2 (ja) * | 2018-06-13 | 2023-03-07 | オムロン株式会社 | ロボット制御装置、ロボット制御方法、及びロボット制御プログラム |
| JP7376268B2 (ja) * | 2019-07-22 | 2023-11-08 | ファナック株式会社 | 三次元データ生成装置及びロボット制御システム |
-
2021
- 2021-07-28 WO PCT/JP2021/027920 patent/WO2023007621A1/ja not_active Ceased
- 2021-07-28 JP JP2023537821A patent/JP7614359B2/ja active Active
- 2021-07-28 CN CN202180098127.XA patent/CN117279749A/zh active Pending
- 2021-07-28 US US18/558,309 patent/US12440967B2/en active Active
- 2021-07-28 DE DE112021007545.4T patent/DE112021007545T5/de active Pending
-
2022
- 2022-07-04 TW TW111124991A patent/TW202305749A/zh unknown
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005135278A (ja) | 2003-10-31 | 2005-05-26 | Fanuc Ltd | シミュレーション装置 |
| JP2006010312A (ja) | 2004-06-21 | 2006-01-12 | Constec Engi Co | 撮像装置 |
| JP2008021092A (ja) | 2006-07-12 | 2008-01-31 | Fanuc Ltd | ロボットシステムのシミュレーション装置 |
| JP2011065399A (ja) | 2009-09-17 | 2011-03-31 | Fujitsu Ltd | シミュレーション装置,シミュレーション方法およびシミュレーションプログラム |
| JP2015136781A (ja) | 2014-01-24 | 2015-07-30 | ファナック株式会社 | ワークを撮像するためのロボットプログラムを作成するロボットプログラミング装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| TW202305749A (zh) | 2023-02-01 |
| US12440967B2 (en) | 2025-10-14 |
| US20240227174A1 (en) | 2024-07-11 |
| WO2023007621A1 (ja) | 2023-02-02 |
| JPWO2023007621A1 (ja) | 2023-02-02 |
| CN117279749A (zh) | 2023-12-22 |
| DE112021007545T5 (de) | 2024-02-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10551821B2 (en) | Robot, robot control apparatus and robot system | |
| JP4835616B2 (ja) | 動作教示システム及び動作教示方法 | |
| JP6594129B2 (ja) | 情報処理装置、情報処理方法、プログラム | |
| JP5113666B2 (ja) | ロボット教示システム及びロボットの動作のシミュレーション結果の表示方法 | |
| KR20140008262A (ko) | 로봇 시스템, 로봇, 로봇 제어 장치, 로봇 제어 방법 및 로봇 제어 프로그램 | |
| JP2009006410A (ja) | 遠隔操作支援装置および遠隔操作支援プログラム | |
| KR20090071366A (ko) | 화상 변환 장치 및 화상 변환 방법 | |
| JP2018136896A (ja) | 情報処理装置、システム、情報処理方法、および物品の製造方法 | |
| CN116038701B (zh) | 一种四轴机械臂的手眼标定方法及装置 | |
| JP2017201276A (ja) | 情報処理装置、情報処理方法、プログラム、システム、および物品製造方法 | |
| WO2022181500A1 (ja) | 視覚センサの出力から得られる3次元位置情報を用いるシミュレーション装置 | |
| JP5857803B2 (ja) | 産業用機械の干渉判定装置、干渉判定方法、コンピュータプログラムおよび記録媒体 | |
| JP2019098409A (ja) | ロボットシステムおよびキャリブレーション方法 | |
| CN115042184A (zh) | 机器人手眼坐标转换方法、装置、计算机设备和存储介质 | |
| JP2014238687A (ja) | 画像処理装置、ロボット制御システム、ロボット、画像処理方法及び画像処理プログラム | |
| JP7614359B2 (ja) | シミュレーション装置 | |
| CN115213894B (zh) | 机器人图像的显示方法、显示系统以及记录介质 | |
| CN115049744A (zh) | 机器人手眼坐标转换方法、装置、计算机设备和存储介质 | |
| JP5904438B2 (ja) | 3次元実装システム、cad装置、実装装置、3次元実装方法及びそのプログラム | |
| WO2024105847A1 (ja) | 制御装置、3次元位置計測システム、及びプログラム | |
| JP2024158511A (ja) | 制御装置、制御方法、ロボットシステムの制御方法、ロボットシステム、物品の製造方法、プログラム及び記録媒体。 | |
| JP2005186193A (ja) | ロボットのキャリブレーション方法および三次元位置計測方法 | |
| JP7401250B2 (ja) | 画像処理装置、制御方法およびプログラム | |
| JP2022124326A (ja) | 情報処理方法、情報処理システム、プログラム | |
| WO2021145304A1 (ja) | 画像処理システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241008 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241120 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241203 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241226 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7614359 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |