JP7555729B2 - カテーテル及び組織の視認性を改善するための表示マーカーの外観制御 - Google Patents
カテーテル及び組織の視認性を改善するための表示マーカーの外観制御 Download PDFInfo
- Publication number
- JP7555729B2 JP7555729B2 JP2020085739A JP2020085739A JP7555729B2 JP 7555729 B2 JP7555729 B2 JP 7555729B2 JP 2020085739 A JP2020085739 A JP 2020085739A JP 2020085739 A JP2020085739 A JP 2020085739A JP 7555729 B2 JP7555729 B2 JP 7555729B2
- Authority
- JP
- Japan
- Prior art keywords
- visual marker
- distal end
- processor
- map
- visual
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording for evaluating the cardiovascular system, e.g. pulse, heart rate, blood pressure or blood flow
- A61B5/024—Measuring pulse rate or heart rate
- A61B5/0245—Measuring pulse rate or heart rate by using sensing means generating electric signals, i.e. ECG signals
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; Determining position of diagnostic devices within or on the body of the patient
- A61B5/061—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body
- A61B5/062—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body using magnetic field
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; Determining position of diagnostic devices within or on the body of the patient
- A61B5/065—Determining position of the probe employing exclusively positioning means located on or in the probe, e.g. using position sensors arranged on the probe
- A61B5/066—Superposing sensor position on an image of the patient, e.g. obtained by ultrasound or x-ray imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
- A61B5/6852—Catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/74—Details of notification to user or communication with user or patient; User input means
- A61B5/742—Details of notification to user or communication with user or patient; User input means using visual displays
- A61B5/743—Displaying an image simultaneously with additional graphical information, e.g. symbols, charts, function plots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0108—Steering means as part of the catheter or advancing means; Markers for positioning using radio-opaque or ultrasound markers
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—Two-dimensional [2D] image generation
- G06T11/60—Creating or editing images; Combining images with text
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H20/00—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance
- G16H20/40—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance relating to mechanical, radiation or invasive therapies, e.g. surgery, laser therapy, dialysis or acupuncture
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H40/00—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices
- G16H40/60—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices
- G16H40/63—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices for local operation
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H50/00—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics
- G16H50/50—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics for simulation or modelling of medical disorders
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1492—Probes or electrodes therefor having a flexible, catheter-like structure, e.g. for heart ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
- A61B2017/00238—Type of minimally invasive operation
- A61B2017/00243—Type of minimally invasive operation cardiac
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00345—Vascular system
- A61B2018/00351—Heart
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00577—Ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/101—Computer-aided simulation of surgical operations
- A61B2034/102—Modelling of surgical devices, implants or prosthesis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2505/00—Evaluating, monitoring or diagnosing in the context of a particular type of medical care
- A61B2505/05—Surgical care
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M2025/0166—Sensors, electrodes or the like for guiding the catheter to a target zone, e.g. image guided or magnetically guided
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2210/00—Indexing scheme for image generation or computer graphics
- G06T2210/41—Medical
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biomedical Technology (AREA)
- Public Health (AREA)
- Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Heart & Thoracic Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Molecular Biology (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Human Computer Interaction (AREA)
- Cardiology (AREA)
- Epidemiology (AREA)
- Primary Health Care (AREA)
- Robotics (AREA)
- Radiology & Medical Imaging (AREA)
- Business, Economics & Management (AREA)
- General Business, Economics & Management (AREA)
- Signal Processing (AREA)
- Anesthesiology (AREA)
- Physiology (AREA)
- Pulmonology (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Hematology (AREA)
- Otolaryngology (AREA)
- Plasma & Fusion (AREA)
- Urology & Nephrology (AREA)
- Gynecology & Obstetrics (AREA)
- Data Mining & Analysis (AREA)
- Databases & Information Systems (AREA)
- Surgical Instruments (AREA)
- Measurement And Recording Of Electrical Phenomena And Electrical Characteristics Of The Living Body (AREA)
- Endoscopes (AREA)
Description
心臓アブレーションシステムなどのいくつかの医療システムは、処置ワークフローを支援するために、操作ディスプレイ上に補足情報を表示してもよい。
図1は、本発明の一実施形態による、カテーテルベースの磁気位置追跡及びアブレーションシステム20の概略的な描画説明図である。システム20は、シャフト遠位端22を有するカテーテル21を備え、カテーテル21は、医師30によって、脈管系を介して患者28の器官、本実施例では心臓26、にナビゲートされる。いくつかの実施形態では、医師30は、カテーテル21の近位端に位置する遠隔操縦器32を使用して、遠位端22を操作しながら、シース23からシャフト遠位端22を挿入する。
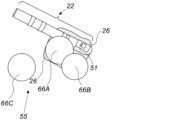
図2Aは、本発明の実施形態による、心臓26の解剖学マップ55の概略的な描画説明図である。いくつかの実施形態では、プロセッサ39は、本明細書では簡潔さのためにマップ55とも称される、解剖学マップ55上に重ね合わされた、視覚マーカー66A、66B、及び66Cなどの1つ又は2つ以上の視覚マーカーを表示するように構成される。本発明及び「特許請求の範囲」の文脈において、「視覚マーカー」という用語は、以下に詳細に記載されるように、心臓26の組織内の遠位端22をナビゲート及び位置決めすることにおいて、医師30を支援し得る補足情報を医師30に提供するように、例えば、ディスプレイ27上のプロセッサ39によって表示される任意の種類のタグを指す。
図2Bは、本発明の実施形態による、心臓26の解剖学マップ55の概略的な描画説明図である。いくつかの実施形態では、カテーテル21を患者28の身体に挿入した後、プロセッサ39は、例えば、心臓26内の遠位端22の現在位置を示す位置信号を受信するように構成される。プロセッサ39は、上記の図1に記載されるように、磁気位置追跡システムの位置センサ51から、又は任意の他の好適なソースから位置信号を受信してもよい。
図3は、本発明の実施形態による、電気生理学的処置中の、心臓26及びカテーテル21の遠位端55の視認性を増加させるための方法を模式的に示すフローチャートである。
(1) 患者の器官内の少なくとも1つのカテーテルの可視化を改善するための方法であって、
前記器官のマップ、及び前記マップ上に重ね合わされた少なくとも1つの第1の視覚マーカーを表示することと、
前記カテーテルの遠位端の、前記マップ内に収まっている位置を受信することと、
(i)受信された前記位置に従う前記カテーテルの前記遠位端、及び(ii)前記第1の視覚マーカーの代わりに、前記第1の視覚マーカーと比べて、前記マップ及び前記遠位端のうちの少なくとも1つの視認性を増加させる、少なくとも1つの第2の視覚マーカーを、前記マップ上に表示することと、を含む、方法。
(2) 前記第1の視覚マーカーの代わりに、前記第2の視覚マーカーを表示することは、前記遠位端の前記位置が、前記第1の視覚マーカーの既定の近傍内にあることを識別することに応答して実行される、実施態様1に記載の方法。
(3) 前記遠位端の前記位置がもはや前記既定の近傍内にないことを識別すると、前記第2の視覚マーカーの代わりに前記第1の視覚マーカーを再表示することを含む、実施態様2に記載の方法。
(4) 前記第1の視覚マーカーの代わりに、前記第2の視覚マーカーを表示することが、前記第1の視覚マーカーの少なくとも1つの属性を修正して、前記第2の視覚マーカーを生成することを含む、実施態様1に記載の方法。
(5) 前記属性が、寸法、形状、不透明度、及び色からなるリストから選択される、実施態様4に記載の方法。
(7) 患者の器官内の少なくとも1つのカテーテルの可視化を改善するためのシステムであって、
出力デバイスと、
プロセッサと、を備え、前記プロセッサは、
前記出力デバイス上に、前記器官のマップ、及び前記マップ上に重ね合わされた少なくとも1つの第1の視覚マーカーを表示することと、
前記カテーテルの遠位端の、前記マップ内に収まっている位置を受信することと、
(i)受信された前記位置に従う前記カテーテルの前記遠位端、及び(ii)前記第1の視覚マーカーの代わりに、前記第1の視覚マーカーと比べて、前記マップ及び前記遠位端のうちの少なくとも1つの視認性を増加させる、少なくとも1つの第2の視覚マーカーを、前記マップ上に表示することと、を行うように構成されている、システム。
(8) 前記遠位端の前記位置が前記第1の視覚マーカーの既定の近傍内にあることを識別することに応答して、前記プロセッサが、前記第1の視覚マーカーの代わりに前記第2の視覚マーカーを表示するように構成されている、実施態様7に記載のシステム。
(9) 前記遠位端の前記位置がもはや前記既定の近傍内にないことを識別すると、前記プロセッサが、前記第2の視覚マーカーの代わりに前記第1の視覚マーカーを再表示するように構成されていることを含む、実施態様8に記載のシステム。
(10) 前記プロセッサが、前記第1の視覚マーカーの少なくとも1つの属性を修正することによって、前記第2の視覚マーカーを生成するように構成されている、実施態様7に記載のシステム。
(12) 前記器官が、心臓を含み、前記第1の視覚マーカー及び前記第2の視覚マーカーが、前記心臓の組織に適用される高周波(RF)アブレーションの1つ又は2つ以上のパラメータを示している、実施態様7に記載のシステム。
Claims (8)
- 患者の器官内の少なくとも1つのカテーテルの可視化を改善するためのプロセッサの作動方法であって、
前記プロセッサが、前記器官のマップ、及び前記マップ上に重ね合わされた少なくとも1つの第1の視覚マーカーを表示することと、
前記プロセッサが、前記カテーテルの遠位端の、前記マップ内に収まっている位置を受信することと、
前記プロセッサが、(i)受信された前記位置に従う前記カテーテルの前記遠位端を、前記マップ上に表示すると共に、及び(ii)前記第1の視覚マーカーを表示せずに、前記第1の視覚マーカーと比べて、前記マップ及び前記遠位端のうちの少なくとも1つの視認性を増加させる、少なくとも1つの第2の視覚マーカーを、前記マップ上に表示することと、を含み、
前記プロセッサが、前記第1の視覚マーカーを表示せずに、前記第2の視覚マーカーを表示することは、前記遠位端の前記位置が、前記第1の視覚マーカーの位置を基準として所定距離内に存在することを識別することに応答して実行され、
前記第2の視覚マーカーは、半透明視覚マーカーであって、前記遠位端の前記位置が前記所定距離内に存在し、前記第2の視覚マーカーが前記遠位端と重なっても、前記遠位端を前記マップ上で視認でき、
前記第1の視覚マーカーは、不透明視覚マーカーであり、前記遠位端の前記位置が前記所定距離外に存在する場合に、前記第1の視覚マーカーが前記マップ上で前記遠位端と重ならないように表示されるようになっている、プロセッサの作動方法。 - 前記プロセッサが、前記遠位端の前記位置がもはや前記所定距離内に存在しないことを識別すると、前記プロセッサが、前記第2の視覚マーカーを表示せずに前記第1の視覚マーカーを再表示することを含む、請求項1に記載のプロセッサの作動方法。
- 前記プロセッサが、前記第1の視覚マーカーを表示せずに、前記第2の視覚マーカーを表示することが、前記プロセッサが、前記第1の視覚マーカーの少なくとも1つの属性を修正して、前記第2の視覚マーカーを生成することを含む、請求項1に記載のプロセッサの作動方法。
- 前記器官が、心臓を含み、前記第1の視覚マーカー及び前記第2の視覚マーカーが、前記心臓の組織に適用される高周波(RF)アブレーションの1つ又は2つ以上のパラメータを示しており、前記1つ又は2つ以上のパラメータは、アブレーションエネルギー、アブレーション持続時間、または、アブレーション温度である、請求項1に記載のプロセッサの作動方法。
- 患者の器官内の少なくとも1つのカテーテルの可視化を改善するためのシステムであって、
出力デバイスと、
プロセッサと、を備え、前記プロセッサは、
前記出力デバイス上に、前記器官のマップ、及び前記マップ上に重ね合わされた少なくとも1つの第1の視覚マーカーを表示することと、
前記カテーテルの遠位端の、前記マップ内に収まっている位置を受信することと、
(i)受信された前記位置に従う前記カテーテルの前記遠位端を、前記マップ上に表示すると共に、(ii)前記第1の視覚マーカーを表示せずに、前記第1の視覚マーカーと比べて、前記マップ及び前記遠位端のうちの少なくとも1つの視認性を増加させる、少なくとも1つの第2の視覚マーカーを、前記マップ上に表示することと、を行うように構成されており、
前記遠位端の前記位置が、前記第1の視覚マーカーの位置を基準として所定距離内に存在することを識別することに応答して、前記プロセッサが、前記第1の視覚マーカーを表示せずに前記第2の視覚マーカーを表示するように構成されており、
前記第2の視覚マーカーは、半透明視覚マーカーであって、前記遠位端の前記位置が前記所定距離内に存在し、前記第2の視覚マーカーが前記遠位端と重なっても、前記遠位端を前記マップ上で視認でき、
前記第1の視覚マーカーは、不透明視覚マーカーであり、前記遠位端の前記位置が前記所定距離外に存在する場合に、前記第1の視覚マーカーが前記マップ上で前記遠位端と重ならないように表示されるようになっている、システム。 - 前記遠位端の前記位置がもはや前記所定距離内に存在しないことを識別すると、前記プロセッサが、前記第2の視覚マーカーを表示せずに前記第1の視覚マーカーを再表示するように構成されていることを含む、請求項5に記載のシステム。
- 前記プロセッサが、前記第1の視覚マーカーの少なくとも1つの属性を修正することによって、前記第2の視覚マーカーを生成するように構成されている、請求項5に記載のシステム。
- 前記器官が、心臓を含み、前記第1の視覚マーカー及び前記第2の視覚マーカーが、前記心臓の組織に適用される高周波(RF)アブレーションの1つ又は2つ以上のパラメータを示しており、前記1つ又は2つ以上のパラメータは、アブレーションエネルギー、アブレーション持続時間、または、アブレーション温度である、請求項5に記載のシステム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/415,159 | 2019-05-17 | ||
| US16/415,159 US10639106B1 (en) | 2019-05-17 | 2019-05-17 | Controlling appearance of displayed markers for improving catheter and tissue visibility |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020189089A JP2020189089A (ja) | 2020-11-26 |
| JP7555729B2 true JP7555729B2 (ja) | 2024-09-25 |
Family
ID=70461396
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020085739A Active JP7555729B2 (ja) | 2019-05-17 | 2020-05-15 | カテーテル及び組織の視認性を改善するための表示マーカーの外観制御 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10639106B1 (ja) |
| EP (1) | EP3738510B1 (ja) |
| JP (1) | JP7555729B2 (ja) |
| CN (1) | CN111938816B (ja) |
| IL (1) | IL274012B2 (ja) |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030074011A1 (en) | 1998-09-24 | 2003-04-17 | Super Dimension Ltd. | System and method of recording and displaying in context of an image a location of at least one point-of-interest in a body during an intra-body medical procedure |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5391199A (en) | 1993-07-20 | 1995-02-21 | Biosense, Inc. | Apparatus and method for treating cardiac arrhythmias |
| DE69532139T2 (de) | 1994-08-19 | 2004-08-26 | Biosense Inc. | Medizinisches Diagnose-, Behandlungs- und Darstellungssystem |
| US6690963B2 (en) | 1995-01-24 | 2004-02-10 | Biosense, Inc. | System for determining the location and orientation of an invasive medical instrument |
| JP4166277B2 (ja) | 1996-02-15 | 2008-10-15 | バイオセンス・ウェブスター・インコーポレイテッド | 体内プローブを用いた医療方法および装置 |
| EP0891152B1 (en) | 1996-02-15 | 2003-11-26 | Biosense, Inc. | Independently positionable transducers for location system |
| US6239724B1 (en) | 1997-12-30 | 2001-05-29 | Remon Medical Technologies, Ltd. | System and method for telemetrically providing intrabody spatial position |
| US6484118B1 (en) | 2000-07-20 | 2002-11-19 | Biosense, Inc. | Electromagnetic position single axis system |
| WO2002065455A1 (en) | 2001-02-15 | 2002-08-22 | Spescom Datavoice (Pty) Limited | Evaluation system and method for binary classification systems utilizing unsupervised database |
| US7729742B2 (en) | 2001-12-21 | 2010-06-01 | Biosense, Inc. | Wireless position sensor |
| US20040068178A1 (en) | 2002-09-17 | 2004-04-08 | Assaf Govari | High-gradient recursive locating system |
| RU2241245C2 (ru) | 2003-01-30 | 2004-11-27 | Майер Александр Александрович | Способ переключения и управления солитонами в туннельно-связанных оптических волноводах слабым сигналом другой несущей частоты |
| US20060116576A1 (en) * | 2004-12-01 | 2006-06-01 | Scimed Life Systems, Inc. | System and use thereof to provide indication of proximity between catheter and location of interest in 3-D space |
| US9204927B2 (en) * | 2009-05-13 | 2015-12-08 | St. Jude Medical, Atrial Fibrillation Division, Inc. | System and method for presenting information representative of lesion formation in tissue during an ablation procedure |
| US9468364B2 (en) | 2008-11-14 | 2016-10-18 | Intuitive Surgical Operations, Inc. | Intravascular catheter with hood and image processing systems |
| US8900150B2 (en) * | 2008-12-30 | 2014-12-02 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Intracardiac imaging system utilizing a multipurpose catheter |
| WO2010140069A1 (en) | 2009-06-04 | 2010-12-09 | Koninklijke Philips Electronics N.V. | Visualization apparatus |
| AU2010274004A1 (en) * | 2009-07-17 | 2012-03-08 | Cyberheart, Inc. | Heart treatment kit, system, and method for radiosurgically alleviating arrhythmia |
| WO2016014949A1 (en) * | 2014-07-24 | 2016-01-28 | Blake Robert C | System and method for cardiac ablation |
| JP6638249B2 (ja) | 2015-08-19 | 2020-01-29 | ヤマハ株式会社 | オーディオシステム |
| US10588692B2 (en) * | 2015-11-06 | 2020-03-17 | Biosense Webster (Israel) Ltd. | Pulmonary vein isolation gap finder |
| US10524695B2 (en) * | 2015-12-22 | 2020-01-07 | Biosense Webster (Israel) Ltd. | Registration between coordinate systems for visualizing a tool |
| WO2018092059A1 (en) * | 2016-11-16 | 2018-05-24 | Navix International Limited | Tissue model dynamic visual rendering |
| US11246662B2 (en) * | 2017-08-01 | 2022-02-15 | Catheter Precision, Inc. | Methods of cardiac mapping and model merging |
-
2019
- 2019-05-17 US US16/415,159 patent/US10639106B1/en active Active
-
2020
- 2020-04-16 IL IL274012A patent/IL274012B2/en unknown
- 2020-05-15 EP EP20174874.6A patent/EP3738510B1/en active Active
- 2020-05-15 JP JP2020085739A patent/JP7555729B2/ja active Active
- 2020-05-15 CN CN202010411339.6A patent/CN111938816B/zh active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030074011A1 (en) | 1998-09-24 | 2003-04-17 | Super Dimension Ltd. | System and method of recording and displaying in context of an image a location of at least one point-of-interest in a body during an intra-body medical procedure |
Also Published As
| Publication number | Publication date |
|---|---|
| US10639106B1 (en) | 2020-05-05 |
| JP2020189089A (ja) | 2020-11-26 |
| IL274012A (en) | 2020-11-30 |
| IL274012B2 (en) | 2023-07-01 |
| EP3738510B1 (en) | 2025-04-16 |
| IL274012B1 (en) | 2023-03-01 |
| CN111938816B (zh) | 2025-05-02 |
| EP3738510C0 (en) | 2025-04-16 |
| CN111938816A (zh) | 2020-11-17 |
| EP3738510A1 (en) | 2020-11-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7179453B2 (ja) | アブレーションの計画と制御のための方法及び装置 | |
| JP2022146920A (ja) | 解剖学的マップ上にオーバーレイされた複数のパラメータの可視化 | |
| US7892232B2 (en) | Medical treatment device and associated method of operation | |
| JP7555729B2 (ja) | カテーテル及び組織の視認性を改善するための表示マーカーの外観制御 | |
| US12521185B2 (en) | Visualizing a quality index indicative of ablation stability at ablation site | |
| JP2025540479A (ja) | 解剖学的マップのサブボリュームにおける透明度レベルの動的変更 | |
| US12387835B2 (en) | Assessing lesions formed in an ablation procedure | |
| US20240050017A1 (en) | Visualizing and Clustering Multiple Electrodes of a High-Definition Catheter Projected on Tissue Surface | |
| US12471987B2 (en) | Presenting quality measures of tissue ablation in a blood vessel using a two-dimensional map | |
| EP4104764A1 (en) | Improving visualization of electrical signals propagating over the surface of patient organ | |
| US12133689B2 (en) | Displaying annotations on design line formed on anatomical map |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230421 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240116 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240118 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20240416 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20240614 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240712 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240813 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240911 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7555729 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |