JP7481237B2 - 物標検出装置 - Google Patents
物標検出装置 Download PDFInfo
- Publication number
- JP7481237B2 JP7481237B2 JP2020194708A JP2020194708A JP7481237B2 JP 7481237 B2 JP7481237 B2 JP 7481237B2 JP 2020194708 A JP2020194708 A JP 2020194708A JP 2020194708 A JP2020194708 A JP 2020194708A JP 7481237 B2 JP7481237 B2 JP 7481237B2
- Authority
- JP
- Japan
- Prior art keywords
- detection
- target
- fusion
- false
- reliability
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/165—Anti-collision systems for passive traffic, e.g. including static obstacles, trees
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/86—Combinations of radar systems with non-radar systems, e.g. sonar, direction finder
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/86—Combinations of lidar systems with systems other than lidar, radar or sonar, e.g. with direction finders
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Electromagnetism (AREA)
- Radar Systems Or Details Thereof (AREA)
- Traffic Control Systems (AREA)
Description
このため、利用シーンに応じて適切にセンサの信頼度を設定して複数センサのフュージョン結果を改善する方法が求められている。
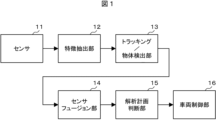
物体検出装置は、センサ11、特徴抽出部11、トラッキング/物体検出部13、センサフュージョン部14、解析計画判断部15及び車両制御部16を有する。センサ11で取得されたデータは特徴抽出部12でクレンジングされ、トラッキング/物体検出部13でトラッキング処理及び物体検出処理が行われて物標データとなる。
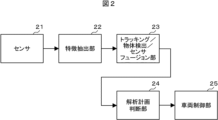
物体検出装置は、センサ21、特徴抽出部22、トラッキング/物体検出/センサフュージョン部23、解析計画判断部24及び車両制御部25を有する。図1に示す物標検出システムと異なる点は、図2に示す物標検出システムでは、トラッキング、物体検出及びセンサフュージョン23が統合されておりセンサ21からの観測値に対して直接合成を行う点である。この場合、(minimum-mean-squred error)MMSE、(Maximum Liklehood estimation)ML、(Maximum A-Posteriori Estimation)MAPといった規範に基づき、ベイズの定理を用いて観測値が得られた際の物標の確率分布を演算する手法が用いられる。図2の手法では、演算量は増加するものの、図1の物標に対してフュージョンを行う場合より一般的に良い特性が得られる。
各センサの観測値は、それぞれトラッキング処理31により、各センサの予測更新値32と合成される。トラッキングの出力の状態ベクトルや共分散行列、物標情報、存在確率等は、一度センサ毎に算出され、算出されたオブジェクトデータに対してセンサフュージョン33を行う。現在の自動運転向けセンサーフュージョンシステムでは、演算量とパフォーマンスのバランスの良い、D-S理論を用いた検討がよく行われており、本発明の物体検出装置で利用できる。
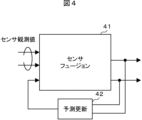
各センサからの観測値に対して直接センサフュージョン41を行う際には、シングルセンサで複数の観測値と物標を合成するトラッキング手法をマルチセンサに拡張することで、トラッキングとセンサフュージョンを統合できる。この場合、ベイズ推定に基づき、フュージョン結果を用いた予測更新42の出力と、複数センサの観測値を確率的に統合する。
以下、図7~図13を用いて、本発明の実施例について説明する。
オブジェクトの存在の有無と、検出結果の関係を図8で表すと、誤検出はクラッタ密度λ、未検出検知確率Pdと結びつけることができる。検知確率やクラッタの密度は、前記PDAの手法のアソシエーション確率βに利用できるので、これらをセンサの信頼度として用いることで、検知結果から適応的にセンサ単位の信頼度を推定できる。
誤検知推定部72では、フュージョン結果の予測値94を用いて、物標毎の未検出率、誤検出頻度を推定する。ここで、91~93は観測値の予測範囲であり、94、96、97は物標の予測値であり、98は観測値である。
誤検出確率算出部75は、複数の物標の誤検出数の平均値や未検出の頻度をセンサ毎に算出して、センサ単位の誤検知推定として出力する。図10において、補足している物標の数分の未検出数の推定値、誤検出数の推定値が前段ブロックから入力され、センサ単位でまとめて平均処理や検知率への変換を行う。
図11(a)に示すように、信頼度補正部76は、センサ単位の誤検知確率に基づき、既定のセンサ毎の信頼度を補正し、補正後の信頼度を出力する。補正の方法はテーブルルックアップを用いた係数選択や、誤検知確率を指揮変換し補正係数として乗算することで実行される。
図11(b)には、誤検知率が増加した際の補正によるセンサ信頼度の変化を示す。既定の信頼度として距離に応じたセンサ信頼度が設定されたものに対して、センサの誤検出確率が高くなった場合に信頼度を減少させる。これにより、利用シーンで信頼度の低いセンサから受ける影響を抑えることができる。
図12では、センサ単位の誤検知確率からセンサの異常を検知する異常検知部121が新たに追加されている。その他の構成は図7に示す実施例1の物標検出装置の構成と同じなのでその説明は省略する。
図13では、センサ単位の誤検知確率を入力としてシーンの検出を行うシーン検出部131が新たに追加されている。その他の構成は図7に示す実施例1の物標検出装置の構成と同じなのでその説明は省略する。
12 特徴抽出部
13 トラッキング/物体検出部、
14 センサフュージョン部
15 解析計画判断部
16 車両制御部
21 センサ
22 特徴抽出部
23 トラッキング/物体検出/センサフュージョン部
24 解析計画判断部
25 車両制御部
31 トラッキング
32 予測更新
33 センサフュージョン
41 センサフュージョン
42 予測更新
71 グルーピング部
72 誤検知推定部
73 フュージョン処理部
74 予測値
75 誤検知確率算出部
76 信頼度補正部
121 異常検知部
131 シーン検出部
Claims (12)
- 複数種類のセンサから出力された複数の観測値に基づいて物標を検出する物標検出装置であって、
フュージョンを処理してフュージョン後の前記物標の予測値を出力するフュージョン処理部と、
前記観測値と前記予測値に基づいて、前記物標ごとの誤検知を推定して誤検知推定結果を出力する誤検知推定部と、
前記誤検知推定結果に基づいて、前記センサ毎の誤検知率を算出する誤検知確率算出部と、
前記誤検知率に基づいて、予め定められた前記センサの信頼度を補正して補正後の信頼度を出力する信頼度補正部と、を有し、
前記フュージョン処理部は、
前記予測値、前記誤検知推定結果及び前記補正後の信頼度に基づいて、前記フュージョンを処理し、
前記誤検知推定部は、
前記予測値を用いて、前記物標毎の未検出率及び誤検出率を推定することを特徴とする物標検出装置。 - 前記フュージョン処理部は、
前記フュージョンを処理して、状態ベクトル、共分散行列又は存在確率を出力することを特徴とする請求項1に記載の物標検出装置。 - 前記誤検知推定部は、
前記センサ毎の未検出の頻度を前記観測値の推定範囲内に存在する前記観測値の有無に基づいて算出し、
前記センサ毎の誤検出の頻度を前記観測値の前記推定範囲内に存在する前記観測値の数に基づいて算出し、
前記未検出の頻度及び前記誤検出の頻度を用いて、前記物標ごとの誤検知を推定することを特徴とする請求項1に記載の物標検出装置。 - 前記誤検知推定部は、
前記観測値が前記推定範囲内に存在しない場合に、前記未検出と判定して前記未検出率の推定値として用い、
前記観測値が前記推定範囲内に少なくとも一つ存在する場合に、誤検出数をカウントして前記誤検出率の推定値として用いることを特徴とする請求項3に記載の物標検出装置。 - 前記誤検知確率算出部は、
前記誤検知推定結果として前記未検出率の推定値及び前記誤検出率の推定値を用いて、複数の前記物標の前記誤検出の数の平均値及び前記未検出の頻度を前記センサ毎に算出して、前記センサ毎の前記誤検知率を算出することを特徴とする請求項4に記載の物標検出装置。 - 複数種類のセンサから出力された複数の観測値に基づいて物標を検出する物標検出装置であって、
フュージョンを処理してフュージョン後の前記物標の予測値を出力するフュージョン処理部と、
前記観測値と前記予測値に基づいて、前記物標ごとの誤検知を推定して誤検知推定結果を出力する誤検知推定部と、
前記誤検知推定結果に基づいて、前記センサ毎の誤検知率を算出する誤検知確率算出部と、
前記誤検知率に基づいて、予め定められた前記センサの信頼度を補正して補正後の信頼度を出力する信頼度補正部と、を有し、
前記フュージョン処理部は、
前記予測値、前記誤検知推定結果及び前記補正後の信頼度に基づいて、前記フュージョンを処理し、
前記誤検知推定部は、
複数のタイムステップに渡る前記誤検知推定結果の平均又は統計処理を用いて、前記物標ごとの前記誤検知を推定することを特徴とする物標検出装置。 - 複数種類のセンサから出力された複数の観測値に基づいて物標を検出する物標検出装置であって、
フュージョンを処理してフュージョン後の前記物標の予測値を出力するフュージョン処理部と、
前記観測値と前記予測値に基づいて、前記物標ごとの誤検知を推定して誤検知推定結果を出力する誤検知推定部と、
前記誤検知推定結果に基づいて、前記センサ毎の誤検知率を算出する誤検知確率算出部と、
前記誤検知率に基づいて、予め定められた前記センサの信頼度を補正して補正後の信頼度を出力する信頼度補正部と、を有し、
前記フュージョン処理部は、
前記予測値、前記誤検知推定結果及び前記補正後の信頼度に基づいて、前記フュージョンを処理し、
前記誤検知推定部は、
時間的に前のステップの前記フュージョン後の前記予測値を用いて、前記物標ごとの前記誤検知を推定することを特徴とする物標検出装置。 - 複数種類のセンサから出力された複数の観測値に基づいて物標を検出する物標検出装置であって、
フュージョンを処理してフュージョン後の前記物標の予測値を出力するフュージョン処理部と、
前記観測値と前記予測値に基づいて、前記物標ごとの誤検知を推定して誤検知推定結果を出力する誤検知推定部と、
前記誤検知推定結果に基づいて、前記センサ毎の誤検知率を算出する誤検知確率算出部と、
前記誤検知率に基づいて、予め定められた前記センサの信頼度を補正して補正後の信頼度を出力する信頼度補正部と、を有し、
前記フュージョン処理部は、
前記予測値、前記誤検知推定結果及び前記補正後の信頼度に基づいて、前記フュージョンを処理し、
前記信頼度補正部は、
前記誤検知率から算出した補正係数を予め定められた前記センサの信頼度に乗算することにより、前記センサの信頼度を補正することを特徴とする物標検出装置。 - 複数種類のセンサから出力された複数の観測値に基づいて物標を検出する物標検出装置であって、
フュージョンを処理してフュージョン後の前記物標の予測値を出力するフュージョン処理部と、
前記観測値と前記予測値に基づいて、前記物標ごとの誤検知を推定して誤検知推定結果を出力する誤検知推定部と、
前記誤検知推定結果に基づいて、前記センサ毎の誤検知率を算出する誤検知確率算出部と、
前記誤検知率に基づいて、予め定められた前記センサの信頼度を補正して補正後の信頼度を出力する信頼度補正部と、を有し、
前記フュージョン処理部は、
前記予測値、前記誤検知推定結果及び前記補正後の信頼度に基づいて、前記フュージョンを処理し、
前記信頼度補正部は、
前記センサの前記信頼度として距離に応じたセンサ信頼度が予め設定されている場合、前記誤検知率が高くなった場合に前記センサ信頼度を減少させるように前記センサの信頼度を補正することを特徴とする物標検出装置。 - 複数種類のセンサから出力された複数の観測値に基づいて物標を検出する物標検出装置であって、
フュージョンを処理してフュージョン後の前記物標の予測値を出力するフュージョン処理部と、
前記観測値と前記予測値に基づいて、前記物標ごとの誤検知を推定して誤検知推定結果を出力する誤検知推定部と、
前記誤検知推定結果に基づいて、前記センサ毎の誤検知率を算出する誤検知確率算出部と、
前記誤検知率に基づいて、予め定められた前記センサの信頼度を補正して補正後の信頼度を出力する信頼度補正部と、を有し、
前記フュージョン処理部は、
前記予測値、前記誤検知推定結果及び前記補正後の信頼度に基づいて、前記フュージョンを処理し、
前記センサ毎の前記誤検知率に基づいて、前記センサの異常を検知するセンサ異常検知部を更に有することを特徴とする物標検出装置。 - 複数種類のセンサから出力された複数の観測値に基づいて物標を検出する物標検出装置であって、
フュージョンを処理してフュージョン後の前記物標の予測値を出力するフュージョン処理部と、
前記観測値と前記予測値に基づいて、前記物標ごとの誤検知を推定して誤検知推定結果を出力する誤検知推定部と、
前記誤検知推定結果に基づいて、前記センサ毎の誤検知率を算出する誤検知確率算出部と、
前記誤検知率に基づいて、予め定められた前記センサの信頼度を補正して補正後の信頼度を出力する信頼度補正部と、を有し、
前記フュージョン処理部は、
前記予測値、前記誤検知推定結果及び前記補正後の信頼度に基づいて、前記フュージョンを処理し、
前記センサ毎の前記誤検知率に基づいて、前記センサのシーンを検出するシーン検出部を更に有することを特徴とする物標検出装置。 - 複数種類のセンサから出力された複数の観測値に基づいて物標を検出する物標検出装置であって、
フュージョンを処理してフュージョン後の前記物標の予測値を出力するフュージョン処理部と、
前記観測値と前記予測値に基づいて、前記物標ごとの誤検知を推定して誤検知推定結果を出力する誤検知推定部と、
前記誤検知推定結果に基づいて、前記センサ毎の誤検知率を算出する誤検知確率算出部と、
前記誤検知率に基づいて、予め定められた前記センサの信頼度を補正して補正後の信頼度を出力する信頼度補正部と、を有し、
前記フュージョン処理部は、
前記予測値、前記誤検知推定結果及び前記補正後の信頼度に基づいて、前記フュージョンを処理し、
前記予測値と前記観測値のグルーピングを行うグルーピング部を更に有し、
前記グルーピング部は、
前記予測値と前記観測値の対応状況を表すグループ情報を生成し、
前記誤検知推定部は、
前記グループ情報を参照して、前記物標ごとの前記誤検知を推定し、
前記フュージョン処理部は、
前記グループ情報を参照して、前記フュージョンを処理することを特徴とする物標検出装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020194708A JP7481237B2 (ja) | 2020-11-24 | 2020-11-24 | 物標検出装置 |
| PCT/JP2021/033549 WO2022113478A1 (ja) | 2020-11-24 | 2021-09-13 | 物標検出装置及び物標検出方法 |
| US18/035,727 US20230410657A1 (en) | 2020-11-24 | 2021-09-13 | Object detection device and object detection method |
| DE112021004904.6T DE112021004904T5 (de) | 2020-11-24 | 2021-09-13 | Objektdetektionsvorrichtung und objektdetektionsverfahren |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020194708A JP7481237B2 (ja) | 2020-11-24 | 2020-11-24 | 物標検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022083331A JP2022083331A (ja) | 2022-06-03 |
| JP7481237B2 true JP7481237B2 (ja) | 2024-05-10 |
Family
ID=81755464
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020194708A Active JP7481237B2 (ja) | 2020-11-24 | 2020-11-24 | 物標検出装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20230410657A1 (ja) |
| JP (1) | JP7481237B2 (ja) |
| DE (1) | DE112021004904T5 (ja) |
| WO (1) | WO2022113478A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7849255B2 (ja) * | 2022-09-07 | 2026-04-21 | 株式会社Soken | 追跡装置 |
| JP7796686B2 (ja) * | 2023-02-24 | 2026-01-09 | 三菱電機株式会社 | 物体検出装置、物体検出方法および物体検出プログラム |
| CN116956216B (zh) * | 2023-07-17 | 2026-04-03 | 中国电子科技集团公司第五十四研究所 | 一种基于模糊理论和d-s证据理论的海上目标识别方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010185824A (ja) | 2009-02-13 | 2010-08-26 | Fujitsu Ltd | 車両検出装置、車両検出方法、および車両検出プログラム |
| JP2018173816A (ja) | 2017-03-31 | 2018-11-08 | パナソニックIpマネジメント株式会社 | 運転支援方法およびそれを利用した運転支援装置、自動運転制御装置、車両、プログラム、運転支援システム |
| WO2020230645A1 (ja) | 2019-05-13 | 2020-11-19 | 日本電気株式会社 | 位置推定システム、位置推定方法、プログラム、及び記録媒体 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6085151A (en) * | 1998-01-20 | 2000-07-04 | Automotive Systems Laboratory, Inc. | Predictive collision sensing system |
| US7522091B2 (en) * | 2002-07-15 | 2009-04-21 | Automotive Systems Laboratory, Inc. | Road curvature estimation system |
| US20090292468A1 (en) * | 2008-03-25 | 2009-11-26 | Shunguang Wu | Collision avoidance method and system using stereo vision and radar sensor fusion |
| EP2306433A1 (en) * | 2009-10-05 | 2011-04-06 | Nederlandse Organisatie voor toegepast -natuurwetenschappelijk onderzoek TNO | Collision avoidance system and method for a road vehicle and respective computer program product |
| DE102020209680B3 (de) * | 2020-07-31 | 2022-01-13 | Zf Friedrichshafen Ag | Signalverarbeitungspfad, Vorrichtung zur Umfelderkennung und Verfahren zur Validierung eines automatisiert betreibbaren Fahrsystems |
| US12164058B2 (en) * | 2021-07-23 | 2024-12-10 | Zoox, Inc. | Radar data analysis and concealed object detection |
| DE102023208463B4 (de) * | 2023-09-01 | 2025-03-27 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung eingetragener Verein | Verfahren zum Bestimmen von Zielinformationen von Radarzielen eines Radarsystems, sowie Radarsystem und Fahrzeug mit einem entsprechenden Radarsystem |
-
2020
- 2020-11-24 JP JP2020194708A patent/JP7481237B2/ja active Active
-
2021
- 2021-09-13 DE DE112021004904.6T patent/DE112021004904T5/de active Pending
- 2021-09-13 US US18/035,727 patent/US20230410657A1/en active Pending
- 2021-09-13 WO PCT/JP2021/033549 patent/WO2022113478A1/ja not_active Ceased
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010185824A (ja) | 2009-02-13 | 2010-08-26 | Fujitsu Ltd | 車両検出装置、車両検出方法、および車両検出プログラム |
| JP2018173816A (ja) | 2017-03-31 | 2018-11-08 | パナソニックIpマネジメント株式会社 | 運転支援方法およびそれを利用した運転支援装置、自動運転制御装置、車両、プログラム、運転支援システム |
| WO2020230645A1 (ja) | 2019-05-13 | 2020-11-19 | 日本電気株式会社 | 位置推定システム、位置推定方法、プログラム、及び記録媒体 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230410657A1 (en) | 2023-12-21 |
| WO2022113478A1 (ja) | 2022-06-02 |
| JP2022083331A (ja) | 2022-06-03 |
| DE112021004904T5 (de) | 2023-07-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7481237B2 (ja) | 物標検出装置 | |
| EP1835463A2 (en) | Obstacle tracking apparatus and method | |
| US20050001759A1 (en) | Method and apparatus for joint kinematic and feature tracking using probabilistic argumentation | |
| KR20180080004A (ko) | 가림환경에서의 표적 형상정보를 활용한 표적 추적 방법 | |
| AU2007327875B2 (en) | A multiple target tracking system incorporating merge, split and reacquisition hypotheses | |
| KR101885839B1 (ko) | 객체추적을 위한 특징점 선별 장치 및 방법 | |
| EP3671272A1 (en) | Vehicle sensor fusion based on fuzzy sets | |
| KR102589987B1 (ko) | 영상 및 레이더 특징 학습 기반 온라인 다중 객체 추적 방법 및 장치 | |
| CN118196138A (zh) | 一种抗遮挡的二次关联多目标跟踪方法 | |
| CN111007880A (zh) | 一种基于汽车雷达的扩展目标跟踪方法 | |
| CN117788514A (zh) | 一种基于DeepSORT的可见光视频多目标跟踪方法及系统 | |
| KR20120048958A (ko) | 객체 추적 및 위치 추정 방법 | |
| CN119027450A (zh) | 一种面向复杂场景下的多目标跟踪方法及设备 | |
| CN115494494A (zh) | 多传感器目标融合方法、装置、电子设备及存储介质 | |
| CN115561795A (zh) | 基于自动驾驶的数据恢复方法、终端设备以及存储介质 | |
| US11555913B2 (en) | Object recognition device and object recognition method | |
| CN108010066B (zh) | 基于红外目标灰度互相关和角度信息的多假设跟踪方法 | |
| CN115236651A (zh) | 障碍物检测方法和电子设备 | |
| CN113589252A (zh) | 一种基于mht算法的多雷达传感器多目标跟踪方法 | |
| CN113192110B (zh) | 多目标跟踪方法、装置、设备及存储介质 | |
| IL181820A (en) | Method for detecting and tracking punctual targets in an optoelectronic surveillance system | |
| CN117433538A (zh) | 一种多源异构传感器航迹融合方法 | |
| Munz et al. | A sensor independent probabilistic fusion system for driver assistance systems | |
| Mobus et al. | Multi-target multi-object radar tracking | |
| JP2004219300A (ja) | 目標追尾装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230912 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231107 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240116 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240227 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240409 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240425 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7481237 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |