JP7476412B2 - 車両衝突試験方法 - Google Patents
車両衝突試験方法 Download PDFInfo
- Publication number
- JP7476412B2 JP7476412B2 JP2023132755A JP2023132755A JP7476412B2 JP 7476412 B2 JP7476412 B2 JP 7476412B2 JP 2023132755 A JP2023132755 A JP 2023132755A JP 2023132755 A JP2023132755 A JP 2023132755A JP 7476412 B2 JP7476412 B2 JP 7476412B2
- Authority
- JP
- Japan
- Prior art keywords
- target vehicle
- time
- vehicle
- collision
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000010998 test method Methods 0.000 title claims description 53
- 230000001133 acceleration Effects 0.000 claims description 17
- 238000012360 testing method Methods 0.000 claims description 14
- 239000011159 matrix material Substances 0.000 claims description 9
- 238000000034 method Methods 0.000 claims description 5
- 230000004044 response Effects 0.000 claims description 3
- 238000006073 displacement reaction Methods 0.000 claims description 2
- 238000012546 transfer Methods 0.000 claims description 2
- 238000012937 correction Methods 0.000 description 4
- 238000005070 sampling Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000009795 derivation Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C5/00—Registering or indicating the working of vehicles
- G07C5/02—Registering or indicating driving, working, idle, or waiting time only
- G07C5/04—Registering or indicating driving, working, idle, or waiting time only using counting means or digital clocks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M17/00—Testing of vehicles
- G01M17/007—Wheeled or endless-tracked vehicles
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C5/00—Registering or indicating the working of vehicles
- G07C5/08—Registering or indicating performance data other than driving, working, idle, or waiting time, with or without registering driving, working, idle or waiting time
- G07C5/0841—Registering performance data
- G07C5/085—Registering performance data using electronic data carriers
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
Description
本出願は、国土交通部・国土交通科学技術振興院の支援により行われた(課題番号21AMDP-C160637-01)。
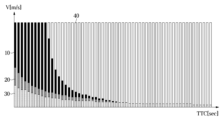
具体的に、22個のシナリオに対して、危険度が高いシナリオであるほど、濃く表示されたことを確認することができる。図4では、24個のポイント(pt)が表示されているが、この中2個のポイントは衝突を回避できないシナリオであるため、最終シナリオ数の計数には含まれない。
TTC=drel/vrel=drel/(Vvut-Vtsv)
2 ターゲット車両
10 回避できないシナリオ
20 失敗シナリオ
30 クリティカルシナリオ
40 通常シナリオ
Claims (8)
- 車両衝突試験に適したシナリオを選定する車両衝突試験方法であって、
ターゲット車両の速度及び目標加速度を設定する段階と、
前記ターゲット車両の設定された速度及び目標加速度に対応して対象車両の速度及び加速度を観測する段階と、
前記ターゲット車両の減速以後、第1の臨界時間超えの場合は、前記対象車両を減速させて、衝突余裕時間(TTC:Time to Collision)を算出する段階と、
前記算出された衝突余裕時間が、第1の臨界時間よりも長い、第2の臨界時間未満であれば、前記対象車両の情報を保存する段階と、
を含み、
前記算出された衝突余裕時間が、第1の臨界時間よりも長い、第2の臨界時間未満であれば、前記対象車両の情報を保存する段階は、
前記ターゲット車両の速度を区間間隔で分けて設定する段階と、
前記ターゲット車両の加速度を区間間隔で分けて設定する段階と、
設定された前記ターゲット車両の速度に対する区間間隔と設定されたターゲット車両の加速度に対する区間間隔との組み合わせにより複数のシナリオを選定する段階と、
複数のシナリオに対して算出された衝突余裕時間が第2の臨界時間未満の場合、選択シナリオとして選定する段階と、を含み、
前記第1の臨界時間は、前記ターゲット車両の減速に対応して対象車両が減速し始めるまでに要する時間であり、前記対象車両の危険決定判断時間及びペダル切り替え(transfer)の機械的時間を考慮して予め設定される時間であり、
前記衝突余裕時間は、下記の式:
(数1)
TTC=d rel /v rel =d rel /(V vut -V tsv )
(ただし、d rel は、ターゲット車両(tsv)と対象車両(vut)との間の距離であり、v rel は、ターゲット車両(tsv)と対象車両(vut)との間の相対速度であり、V tsv は、ターゲット車両(tsv)の速度、V vut は、対象車両(vut)の速度である)
で算出され、
前記対象車両の情報は、前記対象車両の速度、加速度、予め設定された時間間隔ごとに算出される衝突余裕時間を含む、車両衝突試験方法。 - 複数のシナリオに対して算出された衝突余裕時間が第2の臨界時間未満の場合、選択シナリオとして選定する段階は、
予め設定した時間間隔ごとに前記対象車両の衝突余裕時間を算出する段階と、
算出された衝突余裕時間の中で最小衝突余裕時間を選択シナリオとして選定する段階と、を含む、請求項1に記載の車両衝突試験方法。 - 算出された衝突余裕時間の中で最小衝突余裕時間を選択シナリオとして選定する段階は、
前記最小衝突余裕時間が前記第2の臨界時間未満の場合、選択シナリオとして保存する段階と、
前記最小衝突余裕時間が前記第2の臨界時間超過の場合、非選択シナリオとして保存する段階と、を含む、請求項2に記載の車両衝突試験方法。 - 前記第1の臨界時間は、前記対象車両の速度が前記ターゲット車両の速度を同一に追従する走行状況下で算出されたことを特徴とする、請求項3に記載の車両衝突試験方法。
- 前記対象車両の速度が前記ターゲット車両の速度と異なる走行状況の場合には、前記第1の臨界時間が補正されることを特徴とする、請求項4に記載の車両衝突試験方法。
- 前記最小衝突余裕時間が前記第2の臨界時間未満の場合、選択シナリオとして保存する段階は、前記最小衝突余裕時間が前記第2の臨界時間未満であり、前記対象車両が停止するか、前記対象車両と前記ターゲット車両の変位とが等しい場合に、前記対象車両の走行情報を保存する段階、をさらに含む、請求項3に記載の車両衝突試験方法。
- 前記対象車両の走行情報を保存する段階は、前記対象車両の加速度、及び予め設定した時間間隔ごとに算出された衝突余裕時間を含む複数の変数のパラメータをマトリックス形態で保存される、請求項6に記載の車両衝突試験方法。
- 算出された衝突余裕時間のうち最小衝突余裕時間を選択シナリオとして選定する段階は、
前記選択シナリオまたは前記非選択シナリオとして保存された対象車両の走行情報をマトリックス形態で保存する段階と、
前記保存された対象車両の走行情報に基づいて前記対象車両の運転習慣を分析する段階と、をさらに含む請求項3に記載の車両衝突試験方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020220102537A KR102562790B1 (ko) | 2022-08-17 | 2022-08-17 | 차량 충돌 시험 방법 |
| KR10-2022-0102537 | 2022-08-17 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2024028208A JP2024028208A (ja) | 2024-03-01 |
| JP7476412B2 true JP7476412B2 (ja) | 2024-04-30 |
Family
ID=87561171
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023132755A Active JP7476412B2 (ja) | 2022-08-17 | 2023-08-17 | 車両衝突試験方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20240062591A1 (ja) |
| EP (1) | EP4350320A1 (ja) |
| JP (1) | JP7476412B2 (ja) |
| KR (1) | KR102562790B1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011121491A (ja) | 2009-12-11 | 2011-06-23 | Toyota Motor Corp | 運転支援装置 |
| JP2020142557A (ja) | 2019-03-04 | 2020-09-10 | 独立行政法人自動車技術総合機構 | 制動評価装置、制動評価方法、自動制動パターンの評価閾値の生成方法、自動制動パターンの基礎データの収集方法 |
| WO2022130718A1 (ja) | 2020-12-18 | 2022-06-23 | 日立Astemo株式会社 | 情報生成装置 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3758970B2 (ja) * | 2000-11-24 | 2006-03-22 | アイシン精機株式会社 | 車両の衝突予防装置 |
| DE102010051203B4 (de) * | 2010-11-12 | 2022-07-28 | Zf Active Safety Gmbh | Verfahren zur Erkennung von kritischen Fahrsituationen von Lastkraft- oder Personenkraftwagen, insbesondere zur Vermeidung von Kollisionen |
-
2022
- 2022-08-17 KR KR1020220102537A patent/KR102562790B1/ko active IP Right Grant
-
2023
- 2023-08-17 EP EP23191941.6A patent/EP4350320A1/en active Pending
- 2023-08-17 JP JP2023132755A patent/JP7476412B2/ja active Active
- 2023-08-17 US US18/451,603 patent/US20240062591A1/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011121491A (ja) | 2009-12-11 | 2011-06-23 | Toyota Motor Corp | 運転支援装置 |
| JP2020142557A (ja) | 2019-03-04 | 2020-09-10 | 独立行政法人自動車技術総合機構 | 制動評価装置、制動評価方法、自動制動パターンの評価閾値の生成方法、自動制動パターンの基礎データの収集方法 |
| WO2022130718A1 (ja) | 2020-12-18 | 2022-06-23 | 日立Astemo株式会社 | 情報生成装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20240062591A1 (en) | 2024-02-22 |
| KR102562790B1 (ko) | 2023-08-07 |
| EP4350320A1 (en) | 2024-04-10 |
| JP2024028208A (ja) | 2024-03-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8396642B2 (en) | Adaptive cruise control system | |
| US8195373B2 (en) | Vehicle driver assistance system and method | |
| US7840354B2 (en) | Method and device for automatically triggering a vehicle deceleration | |
| US6084508A (en) | Automatic emergency braking method and arrangement | |
| US8386124B2 (en) | Method and device for stabilizing a vehicle after a collision | |
| US7138909B2 (en) | Device for providing signals in a motor vehicle | |
| US8396655B2 (en) | Motor vehicle control system | |
| US9956959B2 (en) | Method for controlling a delay device of a vehicle | |
| US7103464B2 (en) | Automatic distance control method and system for motor vehicles | |
| US7715275B2 (en) | Start assist system for motor vehicles | |
| US11713041B2 (en) | Control system and control method for driving a motor vehicle | |
| CN106564502B (zh) | 用于测定机动车的驾驶员的适应性反应时间的方法和装置 | |
| US11292463B2 (en) | Determination of a control signal for an in-part-autonomous vehicle | |
| US20140025270A1 (en) | Radar initiated foundation braking only for autonomous emergency braking situations | |
| KR102002421B1 (ko) | 차량 주행 환경을 고려한 크루즈 컨트롤 장치 및 방법 | |
| US20170158205A1 (en) | Method, computer program, storage medium and electronic control unit for operating a vehicle | |
| US11273823B2 (en) | Method for determining a maximum speed of a vehicle during a parking maneuver | |
| US10399568B2 (en) | Method and device for automatic longitudinal dynamics control of a motor vehicle | |
| JP7476412B2 (ja) | 車両衝突試験方法 | |
| KR20190067098A (ko) | 전기 차량 또는 하이브리드 차량을 구동하기 위한 방법 및 제어 장치 | |
| KR20220026005A (ko) | 레이더 센서를 기반으로 한 차선 변경 충돌 예측 시스템 및 방법 | |
| CN109421687A (zh) | 制动系统延时自学习方法以及计算机可读存储介质 | |
| US11919389B2 (en) | Vehicle and method of controlling vehicle speed at a road branching point | |
| KR102274802B1 (ko) | Acc 이상 상황에서의 차량 제어 방법 | |
| CN111204319A (zh) | 确定用于自身交通工具的目标减速度的方法和装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230818 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20230818 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231128 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240221 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240416 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240417 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7476412 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |