JP7466780B1 - Gripper, gripping device, and attachment for robot hand - Google Patents
Gripper, gripping device, and attachment for robot hand Download PDFInfo
- Publication number
- JP7466780B1 JP7466780B1 JP2023536333A JP2023536333A JP7466780B1 JP 7466780 B1 JP7466780 B1 JP 7466780B1 JP 2023536333 A JP2023536333 A JP 2023536333A JP 2023536333 A JP2023536333 A JP 2023536333A JP 7466780 B1 JP7466780 B1 JP 7466780B1
- Authority
- JP
- Japan
- Prior art keywords
- gripping
- gripping tool
- attachment
- arm
- gripping device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000463 material Substances 0.000 claims description 19
- 239000004033 plastic Substances 0.000 claims description 9
- 229920003023 plastic Polymers 0.000 claims description 9
- 229920002050 silicone resin Polymers 0.000 claims description 5
- 229920006311 Urethane elastomer Polymers 0.000 claims description 3
- 238000005452 bending Methods 0.000 claims 2
- 238000010586 diagram Methods 0.000 description 31
- 238000000034 method Methods 0.000 description 26
- 210000002435 tendon Anatomy 0.000 description 15
- 230000008569 process Effects 0.000 description 11
- 239000012792 core layer Substances 0.000 description 9
- 239000010410 layer Substances 0.000 description 9
- 230000000694 effects Effects 0.000 description 8
- 229920005989 resin Polymers 0.000 description 8
- 239000011347 resin Substances 0.000 description 8
- 230000007246 mechanism Effects 0.000 description 7
- 239000011247 coating layer Substances 0.000 description 5
- 229920000139 polyethylene terephthalate Polymers 0.000 description 4
- 239000005020 polyethylene terephthalate Substances 0.000 description 4
- 102000002322 Egg Proteins Human genes 0.000 description 3
- 108010000912 Egg Proteins Proteins 0.000 description 3
- -1 Polyethylene terephthalate Polymers 0.000 description 3
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 3
- 235000013345 egg yolk Nutrition 0.000 description 3
- 210000002969 egg yolk Anatomy 0.000 description 3
- 235000013305 food Nutrition 0.000 description 3
- 239000002994 raw material Substances 0.000 description 3
- 229910052710 silicon Inorganic materials 0.000 description 3
- 239000010703 silicon Substances 0.000 description 3
- 229920003002 synthetic resin Polymers 0.000 description 3
- 239000000057 synthetic resin Substances 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- JVTAAEKCZFNVCJ-UHFFFAOYSA-N lactic acid Chemical compound CC(O)C(O)=O JVTAAEKCZFNVCJ-UHFFFAOYSA-N 0.000 description 2
- 239000002906 medical waste Substances 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 239000012857 radioactive material Substances 0.000 description 2
- 239000004677 Nylon Substances 0.000 description 1
- 229920000690 Tyvek Polymers 0.000 description 1
- 230000003466 anti-cipated effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 229920001971 elastomer Polymers 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 235000014655 lactic acid Nutrition 0.000 description 1
- 239000004310 lactic acid Substances 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 229920001778 nylon Polymers 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 229920002994 synthetic fiber Polymers 0.000 description 1
- 239000012209 synthetic fiber Substances 0.000 description 1
Images

















Landscapes
- Manipulator (AREA)
Abstract
本開示技術に係る把持具は、駆動kirigamiの原理に基づいて、把持対象を把持する把持具であって、全体としてはシート状の略(ほぼ)菱形であり、中心近傍にスリット又は大孔が設けられ、スリット又は大孔により、中割り折り又はかぶせ折りを実現するための変形癖を容易に付与できる、というものである。The gripping device of the disclosed technology is a gripping device that grips an object to be gripped based on the principle of driven kirigami, and is generally sheet-like and roughly (almost) diamond-shaped overall, with a slit or large hole near the center, which makes it easy to impart a deformation tendency to achieve a center fold or a cover fold.
Description
本開示技術は、把持具、把持装置、及びロボットハンド用のアタッチメントに関する。 The disclosed technology relates to gripping tools, gripping devices, and attachments for robotic hands.
対象物を把持するロボットハンドの技術分野において、把持する部分(以降、「把持具」と称する)を、折紙(おりがみ)に着想を得て実現したものが知られている。例えば、把持具を紙だけで実現した「オリガミハンド」が知られている。「オリガミハンド」は、紙だけで作成されているため、衛生上の理由により使い捨てることが前提となっている医療分野及び食品分野への応用が期待されている。In the technical field of robot hands that can grasp objects, there are known robots whose grasping parts (hereafter referred to as "gripping tools") have been inspired by origami. For example, there is the "origami hand," a gripping tool made entirely from paper. Because the "origami hand" is made entirely from paper, it is expected to find application in the medical and food industries, where disposable items are assumed to be used for hygienic reasons.
特許文献1には、折紙の「羽ばたく鳥」に着想を得て、同じ原理で作動するGripping Device(把持装置)が開示されている。図1は、折り紙により作成された羽ばたく鳥を示した説明図である。図1に示されるように、折紙の「羽ばたく鳥」は、首部分と尻尾部分とを両手で持ち互いに引っ張ると、羽ばたくように左右の羽が閉じられる。特許文献1に係るGripping Device(把持装置)は、柔軟な材料のシートに切れ込みを入れて実現されており、首部分と尻尾部分とに対応する2つの作動タブを引っ張ることにより、左右の羽に対応する上下の顎部分が閉じて、対象物を把持することができる。 Patent Document 1 discloses a Gripping Device inspired by an origami "flapping bird" and operating on the same principle. Figure 1 is an explanatory diagram showing a flapping bird created with origami. As shown in Figure 1, when the neck and tail parts of the origami "flapping bird" are held with both hands and pulled toward each other, the left and right wings close as if flapping. The Gripping Device in Patent Document 1 is realized by making cuts in a sheet of flexible material, and by pulling two actuating tabs corresponding to the neck and tail parts, the upper and lower jaw parts corresponding to the left and right wings close, making it possible to grip an object.
特許文献1に示されるGripping Device(把持装置)は、1枚の柔軟な材料のシートから製作するというコンセプトには素晴らしいものがあるが、このコンセプトにこだわり過ぎて、実用面ではいくつかの欠点がある。その1つは、特許文献1のFIG.6Bからも見て取れるが、作動タブの引張時に切れ込み部にせん断応力が集中するため、作動タブを強く引張できないという課題があることである。The Gripping Device shown in Patent Document 1 has a great concept of being made from a single sheet of flexible material, but it has some practical drawbacks due to its excessive focus on this concept. One of these, as can be seen from FIG. 6B in Patent Document 1, is that the actuation tab cannot be pulled strongly because shear stress is concentrated in the notch when the actuation tab is pulled.
本開示技術は、上記課題を解決すべく従来技術に係るGripping Device(把持装置)に改良を加え、実用的な把持具を提供することを目的とする。The present disclosure aims to provide a practical gripping tool by improving a gripping device related to conventional technology in order to solve the above problems.
本開示技術に係る把持具は、駆動kirigamiの原理に基づいて、把持対象を把持する把持具であって、全体としてはシート状の略(ほぼ)菱形であり、1組の作動タブと、1組の指先部と、を有し、中心近傍にスリット又は大孔が設けられ、スリット又は大孔により、中割り折り又はかぶせ折りを実現するための変形癖を容易に付与でき、駆動kirigamiの原理は、変形癖により、1組の作動タブの互いが近づくように折り曲げる力を、指先部についての把持力に変換する、というものである。 The gripping device according to the disclosed technology is a gripping device that grips an object to be gripped based on the principle of Driven Kirigami, and is generally (almost) diamond-shaped in sheet form overall, has a set of operating tabs and a set of fingertip portions, and has a slit or large hole near the center, which makes it easy to impart a deformation tendency to achieve a center split fold or a cover fold, and the principle of Driven Kirigami is that the force that bends the set of operating tabs so that they approach each other due to the deformation tendency is converted into a gripping force on the fingertip portions.
本開示技術に係る把持具は上記構成を備えるため、作動タブを強く引張することでき、従来のものよりも実用的である。 Because the gripping device of the disclosed technology has the above-mentioned configuration, it is able to pull the operating tab strongly, making it more practical than conventional ones.
実施の形態1.
図2は、実施の形態1に係る把持具100の特徴を示した説明図である。図2に示されるとおり実施の形態1に係る把持具100は、把持部110と、腱部120と、引張部130と、ソケット部140と、を含む。腱部120は、内部に糸部122を有する。
図3は、図2の切断線A-Aにおける断面図である。図3に示されるとおり、把持具100を構成する把持部110は、被覆層112とコア層114とからなる二層構造であることが好ましい。また、図2及び図3に示されるとおり、コア層114は、剛性を調整するために複数の孔116があけられていてもよい。
Embodiment 1.
Fig. 2 is an explanatory diagram showing the characteristics of the
Fig. 3 is a cross-sectional view taken along line A-A in Fig. 2. As shown in Fig. 3, the
図4は、実施の形態1に係る把持具100において、指先部150の着脱を表した組立図である。指先部150は、把持具100を構成するソケット部140において、着脱可能である。
Figure 4 is an assembly diagram showing the attachment and detachment of the
図5は、実施の形態1に係る把持具100の外観を示したアイソメ図である。図5に示される2本の黒塗り矢印は、指先部150が対象物を掴むときにあたかも指が閉じるように動く方向を表しており、2つの引張部130をそれぞれ白抜き矢印の方向に引っ張ることにより実現される。この駆動原理は、図1に示される折紙の「羽ばたく鳥」の駆動原理と同じである。
海外においては、折紙による羽ばたく鳥は、あまり知られていない。他に同じ原理に基づいているものを挙げるとすれば、飛び出す絵本の仕掛けが挙げられる。海外において、飛び出す絵本の仕掛けは「kirigami」と称されることがある。また、海外においてkirigamiは、折紙の一種であると認識されている。したがって、本明細書において、この駆動原理は、「駆動kirigamiの原理」と称されるものとする。
Fig. 5 is an isometric view showing the appearance of
Origami flapping birds are not well known overseas. Another example of something based on the same principle is the mechanism in a pop-up picture book. Overseas, the mechanism in a pop-up picture book is sometimes called "kirigami." Kirigami is also recognized overseas as a type of origami. Therefore, in this specification, this driving principle is referred to as the "principle of driven kirigami."
《把持具100を構成する把持部110》
把持具100を構成する把持部110は、把持対象を覆うシート状の構成要素である。比喩的な表現を用いれば、把持部110は、人間の手の平及び手の甲に相当する構成要素である。
前述のとおり、把持具100を構成する把持部110は、被覆層112とコア層114とからなる二層構造であることが好ましい。被覆層112は、例えば、シリコン樹脂などの合成樹脂で実現されるとよい。被覆層112は、シリコン樹脂のほか、ウレタンゴム等の摩擦が多く柔らかいゴム状の素材で実現されるとよい。コア層114は、例えば、PET(Polyethylene terephthalate)などの合成樹脂で実現されるとよい。このような二層構造の把持部110は、型に樹脂を流し込んで成形するという方法で製造が可能である。コア層114は、PETのほか、PLA樹脂のように植物由来の乳酸から生成されるプラスチック素材により実現されてもよい。コア層114は、被覆層112のみでは得られない剛性を上げるために用いられるため、剛性を上げるのに適した素材が選ばれる。
把持部110は、全体として、駆動kirigamiの原理を発揮できるように、破断せずに弾性変形する強度と性質とを有する必要がある。
<<
The
As described above, the
The gripping
《把持具100を構成する腱部120》
把持具100を構成する腱部120は、把持部110を両側から引っ張る力を伝える構成要素であり、比喩的な表現を用いれば、人間の腱に相当する構成要素である。すなわち、本開示技術に係る把持具100を有する把持装置は、腱駆動ロボットであるとも言える。
腱部120は、デフォルトの形状が図2に示されるようにVの字をしているが、引張力が働くとVの字をなす角度が小さくなっていく。
前述のとおり腱部120は、内部に糸部122を備える構造である。糸部122は、例えば、高密度ポリエチレン繊維等の合成繊維又は化学繊維であってもよい。糸部122は、釣り糸として用いられるナイロンテグスであってもよい。さらに糸部122は、金属製のワイヤであってもよい。糸部122を覆う腱部120の材料は、被覆層112と同じでもよい。
腱部120は、全体として、把持部110を両側から引っ張れるよう、伸びることなく破断もしない強度と性質とを有する必要がある。
Tendon
The
The
As described above, the
The
《把持具100を構成する引張部130》
把持具100を構成する引張部130は、特許文献1におけるActuation Tab(作動タブ)に相当する構成要素である。機能面から言えば、把持具100を構成する引張部130は、腱部120と後述する腕部200とを接続する構成要素である。図2及び図5に示されるように、引張部130は、滑車のように機能して、糸部122を引張できる。引張部130は、腕部200への脱着のため、軸穴が設けられている。
<<
The
《把持具100を構成するソケット部140》
把持具100を構成するソケット部140は、把持部110と指先部150とを接続する構成要素である。ソケット部140は、指先部150の把持部110への脱着を可能とする。
ソケット部140を設け指先部150を脱着可能とすることは、事前に想定する把持対象に合わせて指先部150を複数種類用意しておき、運用時は把持対象の把持に適した性質の指先部150を選ぶ、といった使い方ができる。また、ソケット部140を設け指先部150を脱着可能とすることは、衛生上の理由による交換を容易にしたり、メンテナンスを容易にしたり、といったメリットがある。
<<
The
Providing the
《把持具100を構成する指先部150》
把持具100を構成する指先部150は、把持対象と直接接触する部分であり、比喩的な表現を用いれば、人間の指に相当する構成要素である。ただし、本開示技術を説明する図2から図7において、指先部150は、人間の指のようにそれぞれが独立して動くもの、としてはいない。
指先部150は、把持部110と同じ材質を用いて作られてもよい。また指先部150は、把持部110と同じ二層構造を有するものでもよい。しかし、本開示技術に係る把持具100の有利な効果は、指先部150を脱着可能とすることにより、把持対象の把持に適した材質及び構造を採用できるというものである。特許文献1に示された従来のGripping Deviceは、1枚の柔軟な材料のシートから製作するというコンセプトにとらわれているため、指先に相当する部分の剛性が必ずしも十分ではなかった、という実用面での欠点があった。ソケット部140及び指先部150を備えるという本開示技術の特徴は、この実用面での欠点を克服するために工夫である。
指先部150は、把持しているときに把持対象が滑り落ちない剛性及び摩擦があることが重要である。また、指先部150は、把持対象を把持しているときに、把持対象を破損しないよう、柔軟性があることも重要である。
The
The
It is important that the
前述のとおり、指先部150は、想定する把持対象に合わせて複数種類用意しておくことが考えられる。この考え方は、ピンセットが、使用目的に合わせて様々な先端形状のものが用意されていることと同じである。
例えば、把持対象が基板又はカードといった板状のものであれば、指先部150は、先端を薄くし、把持方向の内側に向けて少し曲がった形状のものが考えられる。このように指先部150を設計することにより、テーブルの置かれた板状の把持対象も掴んで持ち上げることができる。
As described above, it is conceivable to prepare multiple types of
For example, if the object to be grasped is a plate-like object such as a board or a card, the
図6は、実施の形態1に係る把持装置の外観を示したアイソメ図である。図6に示されるとおり、実施の形態1に係る把持装置は、把持具100と、腕部200-Aと、駆動部300と、を含む。
Figure 6 is an isometric view showing the appearance of the gripping device according to embodiment 1. As shown in Figure 6, the gripping device according to embodiment 1 includes a
《把持装置を構成する腕部200》
把持装置を構成する腕部200は、把持具100と駆動部300とを繋ぐ役割を持つ構成要素である。その名称が示すとおり腕部200は、比喩的な表現を用いれば、人間の腕に相当する構成要素だと言ってもよい。図6に示されるとおり、腕部200は、実施の形態1における態様であることを強調するときは、符号に-Aを付して「腕部200-A」と表示されるものとする。
<<Arm 200 constituting the gripping device>>
The
腕部200-Aは、例えば、下側先端が軸状の形状を有し(以降、「脱着軸」と称する)、引張部130に設けられた軸穴に脱着軸を通すことにより把持具100を保持することができる。
図6に示されるように腕部200-Aは、引張部130を白抜き矢印の指している向きへ引っ張ると、把持部110の復元力により、白抜き矢印とは反対の向きへ引っ張られる。この把持部110の復元力に基づいた力により、把持具100が保持される。腕部200-Aは、白抜き矢印とは反対の向きへ駆動し糸部122を緩めれば、把持部110の復元力が弱まる。すなわち本開示技術に係る把持装置は、腕部200-Aを駆動して糸部122の引張を緩めることにより、容易に、腕部200-Aから把持具100を外すことができる。
The arm portion 200-A has, for example, a shaft-like shape at its lower tip (hereinafter referred to as the “detachable shaft”), and can hold the
6, when the pulling
図8は、腕部200へ引張部130が着脱されるメカニズムを示す説明図である。図8に示されるとおり、腕部200には脱着軸が設けられており、引張部130には軸穴が設けられている。腕部200から把持具100を容易に外すことを実現するため、軸穴の径は、脱着軸の径よりも大きくするとよい。
また、腕部200は、把持対象が重くそのため把持しているときに脱着軸が軸穴から抜けてしまうことを防ぐため、脱着軸にテーパ又は段差が設けられてもよい。
Fig. 8 is an explanatory diagram showing the mechanism by which the
In addition, the
《把持装置を構成する駆動部300》
把持装置を構成する駆動部300は、腕部200を駆動する構成要素である。具体的に言えば、駆動部300は、電動スライダにより実現されてよい。電動スライダは、モータと、回転運動を直線運動に変える機構と、を備えるものである。駆動部300は、直線運動を実現できればよいので、リニアモータが採用されてもよい。
<<Drive
The driving
把持装置は、把持具100の開閉だけではなく、把持対象を把持するために必要な把持具100の位置及び姿勢も制御される必要がある。図6には、把持具100の開閉を実現する駆動部300が示されているが、把持装置として必要な構成の全てを示したものではない。把持装置は、図6には図示されていないが、把持具100の位置及び姿勢を変える機構及び駆動源を有する。The gripping device must control not only the opening and closing of the
実施の形態1に係る把持具100の有利な効果は、把持具100が内部に糸部122を有する腱部120と滑車のように機能する引張部130と備えるため、シートの切れ込み部にせん断応力が集中するということがなく、作動タブである引張部130を強く引張することできる、というものである。The advantageous effect of the
実施の形態1に係る把持具100の別の有利な効果は、指先部150を脱着可能とすることにより、把持対象の把持に適した材質及び構造を採用でき、把持に必要な指先部150の剛性を確保できる、というものである。Another advantageous effect of the
実施の形態1に係る把持装置の有利な効果は、引張部130には腕部200-Aへの脱着のための軸穴が設けられ、腕部200-Aには脱着軸が設けられているため、腕部200-Aを駆動して糸部122の引張を緩めることにより、容易に腕部200-Aから把持具100を外すことができる、というものである。
したがって、本開示技術に係る把持装置は、例えば、汚染された医療廃棄物、又は放射性物質を取り扱う現場において、廃棄する把持対象とともに使い捨て可能な把持具100を提供でき、自動化に貢献できる。
The advantageous effect of the gripping device of embodiment 1 is that since the pulling
Therefore, the gripping device according to the disclosed technique can provide a disposable
上記のとおり実施の形態1に係る把持具100及び把持装置は、従来技術に係るものと比較して、実用的である。As described above, the
実施の形態2.
実施の形態2に係る把持装置は、本開示技術に係る把持装置の変形例である。
特に明記する場合を除き、実施の形態2では、実施の形態1で用いられた符号と同じものが使用される。また実施の形態2では、実施の形態1と重複する説明は、適宜、省略される。
腕部200は、実施の形態2における態様であることを強調するときは、符号に-Bを付して「腕部200-B」と表示されるものとする。
Embodiment 2.
The gripping device according to the second embodiment is a modified example of the gripping device according to the disclosed technique.
Unless otherwise specified, the same reference numerals as those used in the first embodiment are used in the second embodiment. Furthermore, in the second embodiment, descriptions that overlap with those in the first embodiment are omitted as appropriate.
When emphasizing that the
図7は、実施の形態2に係る把持装置の外観を示したアイソメ図である。
図6に示される実施の形態1に係る把持装置において、腕部200-Aは白抜き矢印が示す水平方向に動くことにより、指先部150に把持をさせていた。一方、図7に示される実施の形態2に係る把持装置において、腕部200-Bは白抜き矢印が示す垂直方向に動くことにより、指先部150に把持をさせる。腕部200の駆動方向を水平方向から垂直方向へ変換することは、図7に示されるように、2本のガイドローラ210により実現される。糸部122から見ればガイドローラ210は、引張部130と同様、滑車として機能する。
FIG. 7 is an isometric view showing the appearance of a gripping device according to the second embodiment.
In the gripping device according to the first embodiment shown in Fig. 6, arm 200-A moves in the horizontal direction indicated by the white arrow, thereby causing
実施の形態2に係る把持装置に特有な効果は、腕部200-Bの駆動方向が垂直方向に変換されたことにより、実施の形態1の態様と比べて装置の占有面積を小さくできる、というものである。An effect unique to the gripping device of embodiment 2 is that the driving direction of arm 200-B is converted to the vertical direction, thereby making it possible to reduce the area occupied by the device compared to embodiment 1.
実施の形態2に係る把持装置に特有な別の効果は、2本のガイドローラ210を備えることにより、把持具100が、引っ張られる軸回りに対して回転してしまう、という不安定な状態になることを避けることができる、というものである。Another effect unique to the gripping device of embodiment 2 is that, by providing two
上記のとおり実施の形態2に係る把持装置も、実施の形態1に係る把持装置と同様に、従来技術に係るものと比較して実用的である。As described above, the gripping device of embodiment 2, like the gripping device of embodiment 1, is more practical than those of the prior art.
実施の形態3.
実施の形態3に係る技術は、本開示技術の変形例である。実施の形態1及び実施の形態2においては、引張力を把持力に変えて使用するための構造が示されているが、本開示技術はこれに限定されない。実施の形態3は、把持力を別の把持力に変換するための構造について明確にする。実施の形態3に示される本開示技術は、例えば、市販のロボットハンド(アーム型ロボット)が直接的に把持対象を把持せずに、間接的に把持することを実現することに応用できる。具体的に言えば、実施の形態3に示される本開示技術は、ロボットハンド用のアタッチメントとして応用できる。
Embodiment 3.
The technology according to the third embodiment is a modified example of the technology disclosed herein. In the first and second embodiments, a structure for converting a pulling force into a gripping force is shown, but the technology disclosed herein is not limited thereto. The third embodiment clarifies a structure for converting a gripping force into another gripping force. The technology disclosed herein shown in the third embodiment can be applied to, for example, realizing a commercially available robot hand (arm-type robot) to indirectly grip a gripping target without directly gripping the target. Specifically, the technology disclosed herein shown in the third embodiment can be applied as an attachment for a robot hand.
図9は、実施の形態3に係る技術の原理を説明する折紙の図である。図9は、全体として、菱形の折紙を用いて作成する把持具(又はロボットハンド用のアタッチメント)の折り図である。図9において登場するSE(Short-Edgeに由来)は、鈍角のカドを表している。SEは、中心からの距離が短い側のカドだとも言える。図9において登場するLE(Long-Edgeに由来)は、鋭角のカドを表している。LEは、中心からの距離が長い側のカドだとも言える。
図9Aは、菱形の折紙を用いて作成する把持具の紙モデルの展開図である。展開図において、谷折り線は破線で、山折り線は一点鎖線で、それぞれ示されている。
図9Bは、折り図における第1工程を示している。具体的には、図9Bは、折筋(おりすじ)により折紙が少し変形した様子が示されている。
図9Cは、折り図における第2工程を示している。具体的には、図9Cは、人間の手で折紙のSEを軽く持ったときの折紙の形態を表している。
図9Dは、折り図における最終工程を示している。図9Dにおいては、折紙は、把持対象(この例では輪ゴム)を把持している。図9Dに示されるとおり、この折り方で実現する折紙(最終形)は、人間の手による把持力を、別の把持力(把持対象を把持する力)に変換している、と言える。
FIG. 9 is a diagram of origami paper to explain the principle of the technique according to the third embodiment. FIG. 9 is a folding diagram of a gripping tool (or an attachment for a robot hand) created using diamond-shaped origami paper as a whole. SE (from Short-Edge) that appears in FIG. 9 represents an obtuse-angled edge. SE can also be said to be the edge on the side that is closer to the center. LE (from Long-Edge) that appears in FIG. 9 represents an acute-angled edge. LE can also be said to be the edge on the side that is farther from the center.
Figure 9A is a development of a paper model of a gripping tool made using diamond-shaped origami paper. In the development, the valley folds are shown with dashed lines and the mountain folds are shown with dashed lines.
Figure 9B shows the first step in the folding diagram. Specifically, Figure 9B shows how the origami paper has been slightly deformed by the fold lines.
Fig. 9C shows the second step in the folding diagram. Specifically, Fig. 9C shows the shape of the origami when the SE of the origami is lightly held by a human hand.
Figure 9D shows the final step in the folding diagram. In Figure 9D, the origami is gripping the object (a rubber band in this example). As shown in Figure 9D, the origami (final form) realized by this folding method can be said to convert the gripping force of the human hand into another gripping force (the force to grip the object).
本開示技術に係る発明者らは、把持力を別の把持力に変換する折紙の折り方には、「中割り折り」、又は「かぶせ折り」、が含まれることを見出した。「中割り折り」又は「かぶせ折り」を含む構造は、駆動kirigamiの原理を具現化した一例である、と言える。図9Aにおいて、折紙の中心からLEへ向かう折り線は、山折り線から谷折り線へ変化する。このような折り方は、「中割り折り」を実現する。なお、逆に、中心からカドに向かう折り線が谷折り線から山折り線へ変化する折り方は、「かぶせ折り」となる。The inventors of the disclosed technology have discovered that origami folding methods that convert a gripping force into another gripping force include "middle split fold" or "cover fold". A structure that includes a "middle split fold" or "cover fold" can be said to be an example that embodies the principle of Drive Kirigami. In FIG. 9A, the fold line from the center of the origami toward the LE changes from a mountain fold line to a valley fold line. This type of folding method realizes a "middle split fold". Conversely, a folding method in which the fold line from the center toward the corner changes from a valley fold line to a mountain fold line is a "cover fold".
図9に示される折紙のように、原材料が紙の場合は、紙に折筋(おりすじ)をつけることで最終形が実現される。
しかし、本開示技術が想定する把持具又はアタッチメントは、前述のとおり、原材料をシリコン樹脂、PET、等の合成樹脂、又はPLA樹脂等のプラスチック素材としている。本開示技術は、紙に対する折筋と同様の効果を樹脂等に実現する構造に関するもの、とも言える。
When the raw material is paper, as in the origami shown in Figure 9, the final shape is realized by making creases in the paper.
However, as described above, the gripping tool or attachment envisioned by the present disclosure is made of synthetic resin such as silicon resin, PET, etc., or plastic material such as PLA resin, etc. It can be said that the present disclosure relates to a structure that realizes the same effect on resin as on paper.
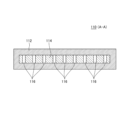
図10は、実施の形態3に係る把持具又はアタッチメントの形状パターン例を示した上面図である。図10には、8つのパターン(CA1,CA2,CB1,CB2,CC1,CC2,CD1,CD2)が示されているが、いずれも、全体としては略(ほぼ)菱形であり、中心近傍にスリット又は大孔がある。本開示技術に係る発明者らは、紙に対する折筋と同様の効果を樹脂等に実現する構造として、中心近傍にスリット又は大孔を設けることが有効であることを見出した。 Figure 10 is a top view showing example shape patterns of a gripper or attachment according to embodiment 3. Eight patterns (CA1, CA2, CB1, CB2, CC1, CC2, CD1, CD2) are shown in Figure 10, all of which are generally (almost) diamond-shaped overall, with a slit or large hole near the center. The inventors of the disclosed technology have found that providing a slit or large hole near the center is effective as a structure that achieves the same effect in resin, etc. as creases in paper.
図10に示される形状パターンのうち、CD1及びCD2は、いずれも中心に大孔が設けられたものである。CD2は、CD1と比較して、大孔についてsと示された長さが大きい。その機序はともかく、本開示技術に係る発明者らは、大孔のサイズが大きいCD2の方が、CD1と比較してより大きな把持力を生み出すことを見出した。
把持具又はアタッチメントの中心近傍に設けられたスリット又は大孔は、把持対象を把持するときの形状(以降、「把持時形状」と称する)に大きく関与する。
Of the shape patterns shown in Fig. 10, CD1 and CD2 both have a large hole in the center. The length of the large hole, indicated as s, of CD2 is larger than that of CD1. Regardless of the mechanism, the inventors of the disclosed technology have found that CD2, which has a large large hole, generates a larger gripping force than CD1.
The slit or large hole provided near the center of the gripping tool or attachment plays a large role in determining the shape when gripping an object (hereinafter referred to as the "grip shape").
図11は、実施の形態3に係る把持具又はアタッチメントについて、折紙の折り図に相当する、変形の過程を示した説明図である。より具体的に言えば、図11は、シリコン樹脂を原材料として、図10に示されるCD2の形状パターンで実現した把持具又はアタッチメントについて、変形の過程を説明したものである。
図11Aから図11Dまでは、人間の手で、把持具又はアタッチメントを把持していったときの連続的な動きを、時系列に、ストップモーションとしたものである。
図11Dには、前述の、中心からカドに向かう折り線が谷折り線から山折り線へ変化する「かぶせ折り」が実現されることが示されている。
Fig. 11 is an explanatory diagram showing the process of deformation of a gripping tool or attachment according to embodiment 3, which corresponds to an origami folding diagram. More specifically, Fig. 11 explains the process of deformation of a gripping tool or attachment realized in the shape pattern of CD2 shown in Fig. 10 using silicon resin as a raw material.
11A to 11D are stop-motion images of the continuous movements of a human hand as it grasps a gripping tool or attachment in a time series.
FIG. 11D shows that the aforementioned “cover fold” is achieved in which the fold line from the center to the corner changes from a valley fold to a mountain fold.
前述のとおり、折紙においては、展開図にそって折筋(おりすじ)をつけることで最終形態が実現される。本開示技術に係る把持具又はアタッチメントも、図11Aから図11Dまでに示した変形癖をつけることで、把持時形状を実現でき把持具又はアタッチメントとして機能できる。原材料をシリコン樹脂とした場合、把持具又はアタッチメントを図11に示す向きで持つことにより、重力も、図11Aから図11Dまでの変形を幇助する。なお、本開示技術に係る発明者らは、図11Aから図11Dまでに示した変形癖をつける作業は、1回程度行えば十分であることを見出した。As mentioned above, in origami, the final shape is realized by making folds along the development diagram. The gripping tool or attachment according to the disclosed technology can also achieve the gripping shape shown in Figs. 11A to 11D by giving it the deformation habit shown in Figs. 11A to 11D, and can function as a gripping tool or attachment. When the raw material is silicone resin, gravity also assists in the deformation to Figs. 11A to 11D by holding the gripping tool or attachment in the orientation shown in Fig. 11. The inventors of the disclosed technology have found that it is sufficient to perform the work of giving it the deformation habit shown in Figs. 11A to 11D just once.
図12は、市販のロボットハンドにより実施の形態3に係るアタッチメントを把持したときの、変形の過程を示した説明図(側面方向)である。
図12Aから図12Dまでは、ロボットハンドで、アタッチメントを把持していったときの連続的な動きを、時系列に、ストップモーションとしたものである。
図12Dにも、前述の、中心からカドに向かう折り線が谷折り線から山折り線へ変化する「かぶせ折り」が実現されることが示されている。
図12において、ロボットハンドの把持方向は、紙面の手前と奥とを結ぶ方向であるが、把持対象を把持する方向は、紙面の右と左とを結ぶ方向である。
FIG. 12 is an explanatory diagram (side view) showing the deformation process when the attachment according to embodiment 3 is gripped by a commercially available robot hand.
12A to 12D are stop-motion images of the continuous movements of the robot hand as it grasps an attachment in chronological order.
FIG. 12D also shows that the aforementioned “cover fold” in which the fold line from the center to the corner changes from a valley fold to a mountain fold can be achieved.
In FIG. 12, the gripping direction of the robot hand is the direction connecting the front and back of the paper, but the direction in which the object is gripped is the direction connecting the right and left of the paper.
図13は、市販のロボットハンドにより実施の形態3に係るアタッチメントを把持したときの、変形の過程を示した説明図(正面方向)である。
図13Aから図13Dまでは、ロボットハンドで、アタッチメントを把持していったときの連続的な動きを、時系列に、ストップモーションとしたものである。図13の例では、アタッチメントの長い側、すなわちLEをロボットハンドが把持し、アタッチメントの短い側、すなわちSEにより把持対象が把持される。また、図13に示されるように、ロボットハンドは、アタッチメントの両側を持ち上げるように、ハンドの角度を変えてもよい(特に図13Dを参照)。
図13からは、アタッチメントの中心に設けられた大孔が、「かぶせ折り」の実現を容易にしていることが伺える。大孔自体の形状は、単なる円又は楕円のみならず、「かぶせ折り」が実現しやすいような工夫がなされたものがよい(例えば、後述の図14Aを参照)。
FIG. 13 is an explanatory diagram (front view) showing the deformation process when the attachment according to embodiment 3 is gripped by a commercially available robot hand.
Figures 13A to 13D are stop-motion images of the continuous movement of a robot hand as it grasps an attachment in a time series. In the example of Figure 13, the robot hand grasps the long side of the attachment, i.e., LE, and the short side of the attachment, i.e., SE, grasps the object to be grasped. Also, as shown in Figure 13, the robot hand may change the angle of the hand so as to lift both sides of the attachment (see especially Figure 13D).
From Fig. 13, it can be seen that the large hole provided in the center of the attachment makes it easy to realize "cover folding". The shape of the large hole itself is not limited to a simple circle or ellipse, but should be designed to make it easy to realize "cover folding" (for example, see Fig. 14A described later).
図14は、市販のロボットハンドにより実施の形態3に係るアタッチメントを把持したときの、変形の過程を示した説明図(下面から見た方向)である。
図14Aから図14Dまでは、ロボットハンドで、アタッチメントを把持していったときの連続的な動きを、時系列に、ストップモーションとしたものである。
図14Aに示される大孔の形状は、アタッチメントの長い方向の2か所に、曲線ではない角張った箇所を有している。このような特徴は、「かぶせ折り」が容易にする。
FIG. 14 is an explanatory diagram (viewed from below) showing the deformation process when the attachment according to embodiment 3 is gripped by a commercially available robot hand.
14A to 14D are stop-motion images of the continuous movements of the robot hand as it grasps an attachment in chronological order.
The shape of the large hole shown in Figure 14A has two angular, non-curved portions in the long direction of the attachment. Such a feature makes it easier to "fold over".
図15は、実施の形態3に係る把持具又はアタッチメントについて、変形癖を与える方法を説明した説明図である。
図15Aは、把持具又はアタッチメントをシリコン樹脂で実現した場合であり、前述のとおり、この場合の変形癖は、人間の手によって1回程度付与すればよい。
図15Bは、把持具又はアタッチメントをプラスチック素材で実現した場合を示したものである。プラスチック素材で実現される場合、把持具又はアタッチメントは、金属製のシリンダ状の治具に固定され、約80℃に約1時間程度、恒温槽等で加熱する。このようなプロセスを経ることにより、プラスチック素材で実現された把持具又はアタッチメントは、変形癖が付与される。
図15Cも、把持具又はアタッチメントをプラスチック素材で実現した場合を示したものである。図15Cは、曲線状のスリットを有する取付け部材を示している。曲線状のスリットを有する取付け部材によっても、プラスチック素材で実現された把持具又はアタッチメントに変形癖を付与することができる。
FIG. 15 is an explanatory diagram illustrating a method for imparting a deformation habit to the gripping tool or attachment according to the third embodiment.
FIG. 15A shows a case where the gripping tool or attachment is realized with silicon resin, and as described above, the deformation habit in this case can be imparted by human hand only once.
15B shows a gripper or attachment made of plastic material. When made of plastic material, the gripper or attachment is fixed to a cylindrical metal jig and heated to about 80°C for about 1 hour in a thermostatic chamber or the like. By going through this process, the gripper or attachment made of plastic material is given a deformation habit.
Fig. 15C also shows a gripping tool or attachment made of a plastic material. Fig. 15C shows an attachment member having a curved slit. The attachment member having a curved slit can also impart a deformation habit to a gripping tool or attachment made of a plastic material.
図16は、実施の形態3に係る把持具又はアタッチメントについて、使用方法のバリエーションを示す説明図である。
図16Aは、把持対象を2つのLE(中心からの距離が長い方のカド)で把持する使用方法を示した説明図である。把持対象を2つのLEで把持する場合、把持力は弱いが、繊細な動きを実現できる。
図16Bは、把持対象を2つのSE(中心からの距離が短い方のカド)で把持する使用方法を示した説明図である。把持対象を2つのSEで把持する場合、把持力が強く、変形癖の付与も容易である。
図16に示されるように、本開示技術に係る把持具又はアタッチメントは、LE間の距離とSE間の距離との比を設計することにより、その用途に応じた把持力を実現することができる。LE間距離とSE間距離との比は、2つの歯車におけるギヤ比と共通した性質を有する、と言える。
FIG. 16 is an explanatory diagram showing variations in the method of using the gripping tool or attachment according to the third embodiment.
16A is an explanatory diagram showing a method of gripping an object with two LEs (the corners farther from the center). When gripping an object with two LEs, the gripping force is weak, but delicate movements can be realized.
16B is an explanatory diagram showing a method of using the device to grasp an object with two SEs (the corners closer to the center). When the object is grasped with two SEs, the grasping force is strong and it is easy to give the object a deformation habit.
16, the gripping tool or attachment according to the disclosed technology can realize a gripping force according to the application by designing the ratio of the distance between LE and SE. It can be said that the ratio of the distance between LE and SE has a property in common with the gear ratio between two gears.
図17は、実施の形態3に係る把持具又はアタッチメントを用いて、液体状の把持対象を把持する様子を示した写真である。図17に示されるように本開示技術に係る把持具又はアタッチメントの形態は、液体状の把持対象にも適している。 Figure 17 is a photograph showing how a liquid-like object is grasped using a grasping tool or attachment according to embodiment 3. As shown in Figure 17, the shape of the grasping tool or attachment according to the disclosed technology is also suitable for a liquid-like object.
図18は、実施の形態3に係る把持具又はアタッチメントを用いて、卵黄を把持する様子を示した写真である。図18に示されるように本開示技術に係る把持具又はアタッチメントの形態は、卵黄のようにデリケートに扱う必要のある食品にも適している。 Figure 18 is a photograph showing an egg yolk being grasped using a grasping tool or attachment according to embodiment 3. As shown in Figure 18, the shape of the grasping tool or attachment according to the disclosed technology is suitable for foods that need to be handled delicately, such as egg yolk.
実施の形態3に係る把持具又はアタッチメントに特有な技術的特徴は、全体としてはシート状の略菱形であり、中心近傍にスリット又は大孔がある、という形態上の特徴である。
この技術的特徴を有することにより、実施の形態3に係る把持具又はアタッチメントは、「中割り折り」又は「かぶせ折り」を実現するための変形癖を容易に付与できる。
実施の形態3に係る把持具又はアタッチメントは、「中割り折り」又は「かぶせ折り」がなされているため、市販のロボットハンドの把持力を、把持対象を把持する別の把持力に変換することができる。
このように実施の形態3に係る把持具又はアタッチメントは作動タブを引張する必要がないため、作動タブの引張時に切れ込み部にせん断応力が集中して破断が生じる、という従来技術の課題を解決できる。
The technical feature unique to the gripping tool or attachment of embodiment 3 is that it is generally sheet-like and rhomboidal in shape, with a slit or large hole near the center.
By having this technical feature, the gripping tool or attachment according to embodiment 3 can easily impart a deformation tendency to achieve a "middle fold" or a "cover fold."
The gripping tool or attachment of embodiment 3 is "center-folded" or "cover-folded," so that the gripping force of a commercially available robot hand can be converted into a different gripping force for gripping the object to be gripped.
As described above, the gripping tool or attachment of embodiment 3 does not require pulling on the actuation tab, and therefore solves the problem of the prior art in which shear stress is concentrated in the notch when the actuation tab is pulled, causing it to break.
(付記)
本願の優先権の基礎とする出願において、出願当初の請求項は、以下のとおりである。なお、以下は、出願当初の請求項における読点(どくてん)と改行との組合せに代えて、セミコロンが使用されている。
[請求項1]
駆動kirigamiの原理に基づいて、把持対象を把持する把持具であって;前記把持対象を覆うシート状の把持部と;内部に糸部を備え、前記把持部を両側から引っ張る力を伝える腱部と;前記腱部と接続され、滑車として機能する引張部と;ソケット部を介して前記把持部に着脱する指先部と、を備え;前記把持部は、被覆層とコア層とからなる二層構造である;把持具。
[請求項2]
前記把持部は;前記被覆層の材質がシリコン樹脂又はウレタンゴムであり;前記コア層の材質がプラスチック素材である;請求項1に記載の把持具。
[請求項3]
請求項1に記載の把持具と;前記把持具と駆動部とを接続する腕部と、を備え;前記駆動部は、引張により前記把持具が変形し前記把持対象を把持する、という現象が生じる方向に前記腕部を駆動する;把持装置。
[請求項4]
前記腕部は、脱着軸を有し;前記引張部は、前記脱着軸よりも径が大きい軸穴を有し;前記把持具は、前記軸穴に前記脱着軸が通されることにより前記腕部に保持され;前記把持具は、前記駆動部により引張が緩むように前記腕部が駆動されることにより前記腕部から取り外すことができる;請求項3に記載の把持装置。
[請求項5]
前記脱着軸は、テーパ又は段差を有する;請求項4に記載の把持装置。
[請求項6]
前記把持具は、廃棄する前記把持対象とともに使い捨てられる;請求項4に記載の把持装置。
(Additional Note)
The claims as originally filed in the application from which this application claims priority are as follows, with semicolons used instead of the comma and line break combinations in the original claims:
[Claim 1]
A gripping device for gripping an object based on the principle of driven Kirigami, comprising: a sheet-like gripping portion which covers the object; a tendon portion which has a thread portion inside and transmits a force pulling the gripping portion from both sides; a pulling portion which is connected to the tendon portion and functions as a pulley; and a fingertip portion which is attached to and detached from the gripping portion via a socket portion; the gripping portion has a two-layer structure consisting of a covering layer and a core layer.
[Claim 2]
The gripping tool according to claim 1, wherein the gripping portion has: the covering layer made of a silicone resin or a urethane rubber; and the core layer made of a plastic material.
[Claim 3]
A gripping device comprising: a gripping tool as described in claim 1; and an arm portion connecting the gripping tool and a drive unit; the drive unit drives the arm portion in a direction in which the gripping tool deforms due to tension and grasps the object to be grasped.
[Claim 4]
The gripping device of claim 3, wherein the arm has a detachment shaft; the tensioning portion has an axial hole having a larger diameter than the detachment shaft; the gripping tool is held on the arm by passing the detachment shaft through the axial hole; and the gripping tool can be removed from the arm by driving the arm with the driving portion to release the tension.
[Claim 5]
The gripping device according to claim 4 , wherein the detachment shaft has a taper or a step.
[Claim 6]
The gripping device according to claim 4 , wherein the gripping tool is disposable together with the gripped object to be discarded.
本開示技術に係る把持具、把持装置、及びロボットハンド用のアタッチメントは、例えば、医療分野及び食品分野におけるロボットによる自動化に応用でき、産業上の利用可能性を有する。
特に、本開示技術は、例えば、汚染された医療廃棄物、又は放射性物質を取り扱う現場において、使い捨て可能なロボットハンド用のアタッチメントを提供でき、自動化に貢献できる。
The gripping tool, gripping device, and attachment for a robot hand according to the disclosed technology can be applied to robotic automation in the medical and food fields, for example, and has industrial applicability.
In particular, the disclosed technology can provide an attachment for a disposable robot hand in sites where contaminated medical waste or radioactive materials are handled, thereby contributing to automation.
100 把持具、110 把持部、112 被覆層、114 コア層、116 孔、120 腱部、122 糸部、130 引張部、140 ソケット部、150 指先部、200(200-A、200-B) 腕部、210 ガイドローラ、300 駆動部。 100 gripping tool, 110 gripping portion, 112 covering layer, 114 core layer, 116 hole, 120 tendon portion, 122 thread portion, 130 tension portion, 140 socket portion, 150 fingertip portion, 200 (200-A, 200-B) arm portion, 210 guide roller, 300 drive portion.
Claims (5)
全体としてはシート状の略(ほぼ)菱形であり、
1組の作動タブと、1組の指先部と、を有し、
中心近傍にスリット又は大孔が設けられ、
前記スリット又は前記大孔により、中割り折り又はかぶせ折りを実現するための変形癖を容易に付与でき、
前記駆動kirigamiの原理は、前記変形癖により、1組の前記作動タブの互いが近づくように折り曲げる力を、前記指先部についての把持力に変換する、
把持具。 A gripping tool that grips a gripping object based on the principle of driven Kirigami,
The overall shape is roughly diamond-shaped,
a pair of actuation tabs and a pair of fingertips;
A slit or a large hole is provided near the center,
The slit or the large hole can easily impart a deformation tendency for realizing a middle fold or a cover fold,
The principle of the driving kirigami is to convert the force of bending the pair of actuation tabs toward each other into a gripping force on the fingertips by the deformation habit.
Grip tool.
請求項1に記載の把持具。 The material is silicone resin, urethane rubber, or plastic material.
The gripping tool according to claim 1.
請求項1に記載の把持具。 Disposable together with the grasped object to be discarded;
The gripping tool according to claim 1.
請求項1に記載の把持具。 The gripping tool according to claim 1 , which is an attachment for a robot hand.
前記把持具の前記作動タブを掴む腕部と、
前記腕部を駆動し、1組の前記作動タブの互いが近づくように、前記腕部によって折り曲げる力により前記把持具を変形し前記把持対象を把持する駆動部と、を備える
把持装置。 The gripping tool according to claim 1 ;
an arm for gripping the actuation tab of the gripper;
and a drive unit that drives the arm portion and deforms the gripping tool by a bending force applied by the arm portion so that the pair of actuation tabs approach each other, thereby gripping the gripping object.
Grip device.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JPPCT/JP2022/038496 | 2022-10-17 | ||
| PCT/JP2022/038496 WO2024084534A1 (en) | 2022-10-17 | 2022-10-17 | Gripping tool and gripping device |
| PCT/JP2023/013037 WO2024084723A1 (en) | 2022-10-17 | 2023-03-30 | Gripping implement, gripping device, and attachment for robot hand |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP7466780B1 true JP7466780B1 (en) | 2024-04-12 |
| JPWO2024084723A1 JPWO2024084723A1 (en) | 2024-04-25 |
| JPWO2024084723A5 JPWO2024084723A5 (en) | 2024-09-11 |
Family
ID=90622479
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023536333A Active JP7466780B1 (en) | 2022-10-17 | 2023-03-30 | Gripper, gripping device, and attachment for robot hand |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7466780B1 (en) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000157088A (en) | 1998-11-25 | 2000-06-13 | Index Japan:Kk | Filthy material treating bag |
| US20100215473A1 (en) | 2007-08-28 | 2010-08-26 | Scanvaegt International A/S | Gripping device, for example for a robot |
| JP2018079550A (en) | 2016-11-18 | 2018-05-24 | 住友重機械工業株式会社 | Holding device and holding method |
| WO2020237058A1 (en) | 2019-05-21 | 2020-11-26 | Trustees Of Boston University | Gripping devices and methods for making the same |
-
2023
- 2023-03-30 JP JP2023536333A patent/JP7466780B1/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000157088A (en) | 1998-11-25 | 2000-06-13 | Index Japan:Kk | Filthy material treating bag |
| US20100215473A1 (en) | 2007-08-28 | 2010-08-26 | Scanvaegt International A/S | Gripping device, for example for a robot |
| JP2018079550A (en) | 2016-11-18 | 2018-05-24 | 住友重機械工業株式会社 | Holding device and holding method |
| WO2020237058A1 (en) | 2019-05-21 | 2020-11-26 | Trustees Of Boston University | Gripping devices and methods for making the same |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2024084723A1 (en) | 2024-04-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6691583B2 (en) | Hands intended to be provided on a humanoid robot with improved fingers | |
| US11123879B2 (en) | Finger mechanism and humanoid hand incorporating same finger mechanism | |
| US7950710B2 (en) | Robot | |
| JP4962728B2 (en) | robot | |
| Ma et al. | M 2 gripper: Extending the dexterity of a simple, underactuated gripper | |
| JP2017503668A (en) | Hand movement intended to be installed on a humanoid robot | |
| JP5660364B2 (en) | Robot hand and robot system | |
| Tincani et al. | Implementation and control of the velvet fingers: a dexterous gripper with active surfaces | |
| JP7466780B1 (en) | Gripper, gripping device, and attachment for robot hand | |
| CN107182443A (en) | Full driving apery hand three refers to fruit and vegetable picking end effector | |
| WO2024084723A1 (en) | Gripping implement, gripping device, and attachment for robot hand | |
| CN107972022B (en) | Humanoid manipulator framework | |
| US9089973B2 (en) | Gripper | |
| Morikage et al. | Multi-fingered soft gripper driven by bellows actuator for handling food materials | |
| CA3029858A1 (en) | Hand intended to equip a humanoid robot | |
| CN112809727B (en) | A rope traction rigid-flexible coupling variable stiffness gripper | |
| JP2019181578A (en) | Sensor module and robot system | |
| KR102362574B1 (en) | Robot hand and finger device of robot hand | |
| Ando et al. | Disposable Soft Robotic Gripper Fablicated from Ribbon Paper with a Few Steps of Origami Folding | |
| JP2018167372A (en) | Finger mechanism and humanoid hand incorporating the same | |
| KR20180019351A (en) | Robot hand | |
| Nomura et al. | Development of multi joint gripper and its dexterous grasping | |
| JP7154463B1 (en) | robot hand | |
| CN218082704U (en) | Stable underwater flexible rope driving manipulator capable of independently controlling and grabbing joints | |
| JP2009214269A (en) | Robot hand |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230615 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230615 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20230615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231024 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231221 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240305 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240402 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7466780 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |