JP7441967B2 - 平面試料輸送を用いた小型臨床診断システム - Google Patents
平面試料輸送を用いた小型臨床診断システム Download PDFInfo
- Publication number
- JP7441967B2 JP7441967B2 JP2022555967A JP2022555967A JP7441967B2 JP 7441967 B2 JP7441967 B2 JP 7441967B2 JP 2022555967 A JP2022555967 A JP 2022555967A JP 2022555967 A JP2022555967 A JP 2022555967A JP 7441967 B2 JP7441967 B2 JP 7441967B2
- Authority
- JP
- Japan
- Prior art keywords
- carrier
- track
- clinical diagnostic
- analyzer
- diagnostic system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/0099—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor comprising robots or similar manipulators
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/0401—Sample carriers, cuvettes or reaction vessels
- G01N2035/0418—Plate elements with several rows of samples
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/0474—Details of actuating means for conveyors or pipettes
- G01N2035/0477—Magnetic
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/0474—Details of actuating means for conveyors or pipettes
- G01N2035/0491—Position sensing, encoding; closed-loop control
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Automatic Analysis And Handling Materials Therefor (AREA)
- Non-Mechanical Conveyors (AREA)
Description
本出願は、2020年3月17日に出願された「COMPACT CLINICAL DIAGNOSTICS SYSTEM WITH PLANAR SAMPLE TRANSPORT」という名称の米国特許仮出願第62/990,684号の利益を主張し、その開示全体がすべての目的のために参照により本明細書に組み入れられる。
(a)1つまたはそれ以上の分析器と、および1つまたはそれ以上のキャリアを備えたトラックとを含む臨床診断システムを提供する工程であって、トラックとキャリアは、水平面でキャリア動作を行うように構成され、少なくとも1つの分析器は、トラックおよび1つまたはそれ以上のキャリアの上方に配置される、工程と;
(b)臨床試料が入っている1つまたはそれ以上の容器を少なくとも1つのキャリア上に配置する工程と;
(c)少なくとも1つの容器の位置および向きを臨床診断システムに対して位置合わせする工程と;
(d)キャリアを、少なくとも1つの容器が分析器の下に配置される位置まで移動させる工程と;
(e)臨床試料を分析器まで移送する工程と;
(f)臨床試料の生化学分析を実施する工程と
を含む。
臨床診断システムは、電子自動システムを備え;
電子自動システムは、1つまたはそれ以上のデジタルプロセッサを含み;
電子自動システムは、電子メモリを含み;
電子自動システムは、電子的に収納された自動プログラムを含み;
電子自動システムは、1つまたはそれ以上のキャリアのそれぞれの位置を検出するように構成された電子式キャリア動作制御システムを含み;
電子式自動制御システムは、ワークフロー優先順位付けを行うように構成され;
電子式自動制御システムは、ワークフロー最適化を行うように構成され;
自動制御プログラムは、臨床診断システムのインストール済みベースの作動中に収集されたワークフローデータを用いてワークフロー最適化を行うように訓練された人工ニューラルネットワークを含み;
自動制御プログラムは、臨床診断システムのモンテカルロシミュレーションによって生成されたワークフローデータを用いてワークフロー最適化を行うように訓練された人工ニューラルネットワークを含み;
臨床診断システムは、1つまたはそれ以上のローダを含み;
臨床診断システムは、生化学試薬用の1つまたはそれ以上の供給ステーションを含み;
1つまたはそれ以上のローダは、トラックおよび1つまたはそれ以上のキャリアの上方に配置され;
1つまたはそれ以上の供給ステーションは、トラックおよび1つまたはそれ以上のキャリアの上方に配置され;
上部トラック面と、少なくとも1つの分析器、ローダまたは供給ステーションの下部固定部材との間の最小垂直隙間が、≧50mm、≧100mm、≧150mm、≧200mm、≧250mmまたは≧300mmであり;
臨床診断システムの基準座標系は、メートル、ミリメートル、マイクロメートル、またはインチの単位で較正され;
トラックは、タイル状のトラックモジュールから構成され;
トラックは、上面が継ぎ目なく接合されたタイル状のトラックモジュールから構成され;
トラックは、上面が矩形、正三角形、または正六角形である1つまたはそれ以上のトラックモジュールから構成され;
上部トラック面が、矩形、正三角形、または正六角形で構成された連結領域を覆い;
上部トラック面が、一重、二重、三重または多重連結された領域を覆い;
トラックとキャリアは、≦1000μm、≦100μm、≦10μm、または≦2μmの横方向精度でキャリア位置決めを行うように構成され;
トラックとキャリアは、≦1000μm、≦100μm、≦10μm、または≦2μmの横方向繰り返し精度でキャリア位置決めを行うように構成され;
トラックとキャリアは、垂直軸のまわりでキャリア回転を行うように構成され;
トラックとキャリアは、トラックの上面上方に0.5mm≦D≦10mmの垂直隙間Dだけ磁気キャリア浮上を行うように構成され;
トラックとキャリアは、トラックの上面上方に0.5mm≦D≦10mmのエアギャップ隙間Dだけ磁気キャリア浮上を行うように構成され;
トラックとキャリアは、トラックの上面上方の水平面でキャリアの磁気浮上および動作を行うように構成され;
トラックとキャリアは、キャリアの重量を決定するように構成され;
トラックとキャリアは、キャリアの重量を測定してキャリアが空であるかペイロードを保持しているかを決定するように構成され;
トラックは、一定磁場または変調磁場を発生させるように構成され;
トラックは、時間変調および/または空間変調された磁場を発生させるように構成され;
トラックは、時間変調および/または空間変調された磁場を発生させ、それによって、水平方向に向けられた磁力を1つまたはそれ以上のキャリアに及ぼすように構成され;
トラックは、複数の電磁誘導器を含み;
トラックは、複数の電磁コイルを含み;
トラックは、複数の磁界センサを含み;
トラックは、複数のホールセンサを含み;
トラックは、複数の電磁誘導器のそれぞれに外部電源から電力を供給するように構成された電気アダプタを含み;
トラックは、複数の電磁コイルのそれぞれに外部電源から電力を供給するように構成された電気アダプタを含み;
トラックは、複数の電磁誘導器のそれぞれの電流を変調するように構成された電子式キャリア動作制御システムを含み;
トラックは、複数の電磁コイルのそれぞれの電流を変調するように構成された電子式キャリア動作制御システムを含み;
各磁界センサは、電子式キャリア動作制御システムに電気的に接続され;
各磁界センサの出力部は、電子式キャリア動作制御システムに電気的に接続され;
電子式キャリア動作制御システムは、デジタルプロセッサを含み;
電子式キャリア動作制御システムは、電子メモリを含み;
電子式キャリア動作制御システムは、複数の磁界センサの出力信号に基づいて1つまたはそれ以上のキャリアのそれぞれの位置を検出するように構成され;
電子式キャリア動作制御システムは、1つまたはそれ以上のキャリアのそれぞれの位置を≦1000μm、≦100μm、≦10μmまたは≦2μmの横方向精度で検出するように構成され;
電子式キャリア動作制御システムは、キャリア経路指定を行うように構成された、電子的に収納されている動作制御プログラムを含み;
電子式キャリア動作制御システムは、キャリアの衝突を防止するように構成され;
電子式キャリア動作制御システムは、キャリア経路指定を最適化するように構成され;
電子式キャリア動作制御システムは、キャリアの重量を決定するように構成され;
電子式キャリア動作制御システムは、キャリアの重量を測定してキャリアが空であるかペイロードを保持しているかを決定するように構成され;
各キャリアは、1つまたはそれ以上の永久磁石を含み;
各キャリアは、1つまたはそれ以上の永久磁石アセンブリを含み;
各キャリアは、1つまたはそれ以上のハルバッハアレイを含み;
各キャリアは、4つの矩形ハルバッハアレイを含み;
少なくとも1つのキャリアは、矩形ストライプ、十字または円として形作られた1つまたはそれ以上のパターンを含む、1つまたはそれ以上の光学的位置合わせマークを含み;
少なくとも1つのキャリアは、ポリマー材料、金属、ガラスまたはセラミックから作られたカバープレートを含み;
少なくとも1つのキャリアは、ポリマー材料、金属、またはセラミックから作られたコーティング膜を含み;
少なくとも1つのキャリアの上面には、試料または反応物の容器を保持するラックの機械的位置合わせのための1つまたはそれ以上の凸状突起が装備され;
少なくとも1つのキャリアの上面には、円錐または円筒形状を有する1つまたはそれ以上の凸状突起がラックの機械的位置合わせのために装備され、ラックの下面には、突起に対する1つまたはそれ以上の形状適合凹部が装備されており;
1つまたはそれ以上のキャリアには、臨床試料流体および/または生化学反応物流体用の1つ、2つ、3つまたはそれ以上の容器を保持するように構成されたラックが装備され;
各ラックは、1つ、2つ、3つまたはそれ以上の凹部を含み;
各ラックは、1つ、2つ、3つまたはそれ以上の凹部を含み、各凹部には、容器を固定するための1つ、2つ、または3つのばねが装備され;
各ラックは、矩形または円筒形の1つ、2つ、3つまたはそれ以上の凹部を含み;
各ラックは、容器を保持するための1~40個、1~30個、1~20個または1~10個の凹部を含み;
少なくとも1つのローダは、キャリアからラックをそれぞれ、キャリアの上へとピックアンドプレース搬送するように構成されたロボットハンドラを含み;
少なくとも1つのローダは、キャリア上に配置されたラックから容器をそれぞれ、ラックの中へとピックアンドプレース搬送するように構成されたロボットハンドラを含み;
少なくとも1つの分析器は、キャリア上に配置されたラックから容器をそれぞれ、ラックの中へとピックアンドプレース搬送するように構成されたロボットハンドラを含み;
少なくとも1つの分析器は、キャリア上に配置されたラックに保持された容器から流体をそれぞれ、吸引して容器の中へ供給するように構成されたロボットピペットシステムを含み;
少なくとも1つの分析器は、キャリアから試薬ベッセルをそれぞれ、キャリアの上へとピックアンドプレース搬送するように構成されたロボットハンドラを含み;
少なくとも1つの分析器は、キャリア上に配置された試薬ベッセルから流体を吸引するように構成されたロボットピペッタを含み;
臨床診断システムは、少なくとも1つのデジタルビジョンシステムを含み;
デジタルビジョンシステムと電子式キャリア動作制御システムは、キャリア上に配置された物体を臨床診断システムに対して位置合わせしリアルタイムに位置決めするように構成され;
デジタルビジョンシステムと電子式キャリア動作制御システムは、キャリア上に配置された物体を臨床診断システムの基準座標系に対して位置合わせしリアルタイムに位置決めするように構成され;
デジタルビジョンシステムと電子式キャリア動作制御システムは、キャリア上に配置された物体をキャリアに対して位置合わせするように構成され;
デジタルビジョンシステムと電子式キャリア動作制御システムは、キャリア上に配置された物体をキャリアの座標系に対して位置合わせするように構成され;
臨床診断システムは、機械的アライナを含み;
臨床診断システムは、制御されたキャリア動作と連動してデジタルビジョンシステムを使用して、キャリア上に配置された物体を位置合わせするように構成された機械的アライナを含み;
デジタルビジョンシステムと機械的アライナは、ラックをキャリアに対して位置合わせするように構成され;
機械的アライナは、ラックを支持しているキャリアが水平面で並進運動する間、ラックを所定の位置に保持するように構成され;
機械的アライナは、ラックを支持しているキャリアが垂直軸のまわりで回転している間、ラックを所定の位置に保持するように構成され;
機械的アライナは、内面がラックの表面輪郭と一致する凹部を含み;
機械的アライナは、矩形の凹部を含み、各ラックは、矩形で垂直方向に向けられた4つまたはそれ以上の端部を含み;
デジタルビジョンシステムは、1つ、2つ、3つまたはそれ以上のデジタルカメラを含み;
デジタルビジョンシステムの1つ、2つ、3つまたはそれ以上のデジタルカメラには、テレセントリック対物レンズが装備され;
デジタルビジョンシステムの1つ、2つ、3つ以上のデジタルカメラには、少なくとも1つの方向に≧30mm、≧40mm、≧50mm、≧60mm、≧70mm、≧80mm、≧90mm、≧100mm、≧110mm、≧120mm、≧130mm、≧140mmの視野を持つテレセントリック対物レンズが装備され;
デジタルビジョンシステムは、テレセントリック対物レンズをそれぞれ装備した2つのデジタルカメラを含み;
デジタルビジョンシステムは、テレセントリック対物レンズをそれぞれ装備した3つのデジタルカメラを含み;
デジタルビジョンシステムとトラックとキャリアは、容器を保持するラックが上に配置されているキャリアのデジタル画像を線走査または回転走査によって取り込むように構成され;
デジタルビジョンシステムの1つ、2つ、3つまたはそれ以上のデジタルカメラは、通常(透視)対物レンズまたはテレセントリック対物レンズと、1~64センサ列から構成される光電子イメージセンサとを含む走査カメラとして構成され;
デジタルビジョンシステムの1つ、2つ、3つまたはそれ以上のデジタルカメラは、通常(透視)対物レンズまたはテレセントリック対物レンズと、それぞれが4k~32k(すなわち、4×1024~32×1024)のアクティブピクセルで構成された1~64センサ列から構成される光電子イメージセンサとを含む走査カメラとして構成され;
デジタルビジョンシステムの1つ、2つ、3つまたはそれ以上のデジタルカメラは、ライトフィールドカメラとして構成され、電子イメージセンサとカメラの対物レンズとの間に配置されたマルチレンズアレイを含み;
デジタルビジョンシステムは、2つまたは3つのデジタルカメラを含み、2つまたは3つのデジタルカメラの光軸は、互いに実質的に垂直方向に向いており;
デジタルビジョンシステムは、1つ、2つ、3つまたはそれ以上のデジタルカメラのうちの1つのデジタルカメラに向けて、その光軸に沿って平行明視野照明するようにそれぞれ構成された1つ、2つ、3つまたはそれ以上の光源を含み;
デジタルビジョンシステムは、1つ、2つ、3つまたはそれ以上のデジタルカメラのうちの1つのデジタルカメラの光軸に沿って明視野照明用の平行光源を反射するように構成された、少なくとも1つの半透明鏡またはビームスプリッタを含み;
デジタルビジョンシステムは、デジタルプロセッサおよび電子メモリを含み;
デジタルビジョンシステムは、電子的に収納されたプログラムを含み;
デジタルビジョンシステムは、画像解析するように構成され;
デジタルビジョンシステムは、物体認識するように構成され;
デジタルビジョンシステムは、臨床診断システムの基準座標系において物体の位置を決定するように構成され;
デジタルビジョンシステムは、臨床診断システムの基準座標系において物体の向きを決定するように構成され;
デジタルビジョンシステムは、物体の光学的輪郭を決定するように構成され;
デジタルビジョンシステムは、物体の光学的輪郭の寸法を決定するように構成され;
(a)1つまたはそれ以上の分析器と、1つまたはそれ以上のキャリアを備えたトラックとを含む臨床診断システムを提供する工程であって、トラックとキャリアは、水平面でキャリア動作を行うように構成され、少なくとも1つの分析器は、トラックおよび1つまたはそれ以上のキャリアの上方に配置される、工程と;
(b)臨床試料が入っている1つまたはそれ以上の容器を、少なくとも1つのキャリア上に配置する工程と;
(c)少なくとも1つの容器の位置および向きを、臨床診断システムに対して位置合わせする工程と;
(d)キャリアを、少なくとも1つの容器が分析器の下に配置される位置まで移動させる工程と;
(e)臨床試料を分析器まで移送する工程と;
(f)臨床試料の生化学分析を実施する工程。
1つまたはそれ以上の試料容器がラックに保持され、このラックはキャリア上に配置され;
工程(c)で、キャリアおよび容器の1つ、2つまたはそれ以上のデジタル画像が、デジタルビジョンシステムを使用して取り込まれ、処理され;
工程(c)で、キャリア、ラック、および容器の1つ、2つまたはそれ以上のデジタル画像が、デジタルビジョンシステムを使用して取り込まれ、処理され;
工程(c)で、キャリアおよび容器は、1つ、2つ、3つまたはそれ以上のデジタルカメラを使用して撮像され、少なくとも1つのデジタルカメラにはテレセントリック対物レンズが装備され;
工程(c)で、キャリア、ラックおよび容器は、1つ、2つ、3つまたはそれ以上のデジタルカメラを使用して撮像され、少なくとも1つのデジタルカメラにはテレセントリック対物レンズが装備され;
工程(c)で、キャリアおよび容器の相対寸法または絶対寸法が決定され;
工程(c)で、キャリア、ラック、および容器の相対寸法または絶対寸法が決定され;
工程(c)で、中心から外れた位置でキャリアによって支持されたラックが、キャリアに対して位置合わせされ;
工程(c)で、中心から外れた位置でキャリアによって支持されたラックがキャリアに対して、機械的アライナおよびデジタルビジョンシステムを使用して位置合わせされ;
工程(c)で、ラックを支持するキャリアが水平面を移動する間、ラックが機械的アライナによって所定の位置に保持され;
工程(c)で、ラックを支持するキャリアが垂直軸のまわりを回転する間、ラックが機械的アライナによって所定の位置に保持され;
工程(d)、(e)、(f)で、少なくとも1つの容器の位置がリアルタイムで監視され;
少なくとも1つのキャリアが磁気浮上し、トラックの上面上方の水平面を移動し;
工程(e)で、ピペットが垂直軸と実質的に平行な方向に沿って下ろされ、臨床試料に浸され、試料の一部分が吸引されて分析器まで移送され;
臨床診断システムは、試料分析のワークフローを最適化する電子式自動制御システムを含み;
生化学分析のワークフローは、臨床診断システムの一部を形成する電子式自動制御システムによって最適化され;
少なくとも1つの試料に優先順位が割り当てられ、前記優先順位が電子式自動制御システムに入力され、それによって処理され;
自動制御システムは、臨床診断システムのインストール済みベースの作動中に収集されたワークフローデータを用いてワークフロー最適化を行うように訓練された人工ニューラルネットワークを使用し;および/または
自動制御システムは、臨床診断システムのモンテカルロシミュレーションによって生成されたワークフローデータを用いてワークフロー最適化を行うように訓練された人工ニューラルネットワークを使用する。



ここで、

「水平または垂直平面内の選択された連続位置における動作および位置決め」とは、1つまたはそれ以上の動的構成要素を含む、かつ、任意に選択可能な平面経路に沿った構成要素の動きを示唆する前記平面内の矩形などの、連続領域内の任意の選択ポイントまで前記構成要素を移動させるように構成されている、電子アクチュエータシステムに関連し;
「リアルタイム」とは、数マイクロ秒から数ミリ秒までに開始および/または完了される自動動作に関連し;
「実質的に垂直」とは、90度から≦5度だけずれた角度を囲む2つの方向または軸を指し;
「実質的に平行」とは、≦5°の角度を囲む2つの方向または軸を指し;
「トラックおよびキャリアの上方に配置された」とは、分析器、ローダおよび/または供給ステーションに関連し、これらの水平断面の、トラックの上面への垂直投影が、その水平断面全体の≧30%、≧40%、≧50%、≧60%、≧70%、≧80%または≧90%になり;
2 分析器
3 ロボットピペッタ
3A ピペット
4 トラック
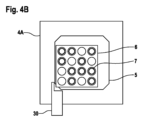
4A トラックモジュール
5 キャリア
6 ラック
7 容器
8 試薬容器
9 ローダ
10 供給ステーション
21 デジタルカメラ
22 デジタルカメラ
25 光源(好ましくは平行)
26 鏡
27 光ビーム中心軸
30 機械的アライナ
40 水平面
Claims (13)
- 臨床診断システムであって:
少なくとも1つの分析器と;
トラックと;
複数のキャリアとを含み、
ここで、トラックとキャリアは、水平面内でキャリア動作を行うように構成され、
キャリアは、単一トラックのシステムに限定されることやトラックを一方向にのみ移動することがなく、水平面をある程度自由に移動することができ、
少なくとも1つの分析器は、トラックおよびキャリアの上方に配置されており、
デジタルビジョンシステムをさらに含み、デジタルビジョンシステムは、キャリア上に配置されたオブジェクトを臨床診断システムに対して位置合わせし、リアルタイムの位置決めをするように構成され、テレセントリック対物レンズを装備した2以上のデジタルカメラを含む、
前記臨床診断システム。 - 電子式キャリア動作制御システムをさらに含む、請求項1に記載の臨床診断システム。
- デジタルビジョンシステムおよび電子式キャリア動作制御システムは、キャリア上に配置されたオブジェクトを臨床診断システムに対して位置合わせし、リアルタイムの位置決めをするように構成されている、請求項2に記載の臨床診断システム。
- 1つまたはそれ以上のローダと;
生化学試薬用の1つまたはそれ以上の供給ステーションとをさらに含む、請求項1に記載の臨床診断システム。 - ローダのうちの少なくとも1つ、およびステーションのうちの少なくとも1つは、トラックの上方に配置される、請求項4に記載の臨床診断システム。
- トラックとキャリアは、トラックの上面上方の水平面でキャリアの磁気浮上および動作
を行うように構成されている、請求項1に記載の臨床診断システム。 - 少なくとも1つの分析器は、垂直軸に実質的に平行な方向の直線ピペット動作が得られるように構成されたロボットピペッタを含む、請求項1に記載の臨床診断システム。
- ワークフローの最適化および試料の優先順位付けを行うように構成された自動制御システムをさらに含む、請求項1に記載の臨床診断システム。
- 自動生化学解析の方法であって:
(a)少なくとも1つの分析器と、複数のキャリアを備えたトラックとを含み、デジタルビジョンシステムをさらに含み、デジタルビジョンシステムは、複数のキャリア上に配置された複数のオブジェクトを臨床診断システムに対して位置合わせし、リアルタイムの位置決めをするように構成され、テレセントリック対物レンズを装備した2以上のデジタルカメラを含む臨床診断システムを提供する工程であって、トラックとキャリアは、水平面でキャリア動作を行うように構成され、キャリアは、単一トラックのシステムに限定されることやトラックを一方向にのみ移動することがなく、水平面をある程度自由に移動することができ、少なくとも1つの分析器は、トラックおよびキャリアの上方に配置される、工程と;
(b)臨床試料が入っている少なくとも1つの容器をキャリア上に配置する工程と;
(c)少なくとも1つの容器の位置および向きを臨床診断システムに対して位置合わせする工程と;
(d)各キャリアを、少なくとも1つの容器が分析器の下に配置される位置まで移動させる工程と;
(e)臨床試料を分析器まで移送する工程と;
(f)臨床試料の生化学分析を実施する工程と
を含む、前記方法。 - ステップ(c)で、キャリアおよび容器の1つ、2つまたはそれ以上のデジタル画像は、デジタルビジョンシステムを用いて取り込まれ、処理される、請求項9に記載の方法。
- 生化学分析のワークフローは、電子式自動制御システムによって最適化される、請求項9に記載の方法。
- 各キャリアは磁気浮上し、トラックの上面上方の水平面を移動する、請求項9に記載の方法。
- 工程(e)で、ピペットは、垂直軸と実質的に平行な方向に沿って下ろされ、臨床試料に浸され、試料の一部分が吸引されて分析器まで移送される、請求項9に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US202062990684P | 2020-03-17 | 2020-03-17 | |
| US62/990,684 | 2020-03-17 | ||
| PCT/US2021/022636 WO2021188596A1 (en) | 2020-03-17 | 2021-03-16 | Compact clinical diagnostics system with planar sample transport |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023518933A JP2023518933A (ja) | 2023-05-09 |
| JP7441967B2 true JP7441967B2 (ja) | 2024-03-01 |
Family
ID=77771288
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022555967A Active JP7441967B2 (ja) | 2020-03-17 | 2021-03-16 | 平面試料輸送を用いた小型臨床診断システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20230146784A1 (ja) |
| EP (1) | EP4121732A4 (ja) |
| JP (1) | JP7441967B2 (ja) |
| CN (1) | CN115210551A (ja) |
| WO (1) | WO2021188596A1 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4209573A4 (en) * | 2020-09-01 | 2024-05-29 | Hitachi High-Tech Corporation | Pretreatment mechanism-integrated nucleic acid analysis device |
| CN114459461B (zh) * | 2022-01-26 | 2023-11-28 | 西安应用光学研究所 | 一种基于gis与实时光电视频的导航定位方法 |
| GB2615525A (en) * | 2022-02-04 | 2023-08-16 | Automata Tech Limited | A workbench system |
| US12406753B2 (en) | 2022-03-03 | 2025-09-02 | Siemens Healthcare Diagnostics Inc. | Diagnostic laboratory systems and methods of imaging tube assemblies |
| WO2023212234A1 (en) * | 2022-04-28 | 2023-11-02 | Life Technologies Corporation | Laboratory automation using labware movement |
| DE102022113005A1 (de) * | 2022-05-24 | 2023-11-30 | Syntegon Technology Gmbh | Transportsystem für Sterilgut-Tubs und Verwendung eines Transportsystems |
| EP4584723A4 (en) * | 2022-09-07 | 2025-10-29 | Siemens Healthcare Diagnostics Inc | DEVICES AND METHODS FOR LEARNING SAMPLE CONTAINER IDENTIFICATION NETWORKS IN DIAGNOSTIC LABORATORY SYSTEMS |
| EP4609206A1 (en) * | 2022-10-26 | 2025-09-03 | Life Technologies Corporation | Laboratory automation devices and related systems and methods |
| IT202200026922A1 (it) * | 2022-12-28 | 2024-06-28 | Ima Spa | Apparecchiatura e procedimento per movimentare automaticamente oggetti nell’ambito di un ambiente con atmosfera controllata. |
| JP7689546B2 (ja) * | 2023-05-29 | 2025-06-06 | 花王株式会社 | 監視システム |
| CN119460585A (zh) * | 2023-08-09 | 2025-02-18 | B和R工业自动化有限公司 | 用于调节运输单元的方法和服务站 |
| US20250103015A1 (en) * | 2023-09-25 | 2025-03-27 | Keith James McKinley | Laboratory automation using labware movement |
| DE102024118576A1 (de) * | 2024-07-01 | 2026-01-08 | Bausch + Ströbel SE + Co. KG | Planares Transportsystem und Anlage zum Verarbeiten pharmazeutischer Behälter mit einem planaren Transportsystem |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008249461A (ja) | 2007-03-30 | 2008-10-16 | Disk Tekku Kk | 分注検査装置 |
| JP2008286623A (ja) | 2007-05-17 | 2008-11-27 | Toppan Printing Co Ltd | 分注検査装置および検査方法 |
| US20160011224A1 (en) | 2013-03-08 | 2016-01-14 | Siemens Healthcare Diagnostics Inc. | Surface markings for an optically guided device |
| JP2017077971A (ja) | 2011-11-04 | 2017-04-27 | エフ.ホフマン−ラ ロシュ アーゲーF. Hoffmann−La Roche Aktiengesellschaft | 研究室試料配送システムおよび対応する動作方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006067974A1 (ja) * | 2004-12-20 | 2006-06-29 | Kyushu Institute Of Technology | 超電導磁気浮上による非接触搬送装置 |
| DE102010028769A1 (de) * | 2010-05-07 | 2011-11-10 | Pvt Probenverteiltechnik Gmbh | System zum Transportieren von Behältern zwischen unterschiedlichen Stationen und Behälterträger |
| EP2589968A1 (en) | 2011-11-04 | 2013-05-08 | Roche Diagnostics GmbH | Laboratory sample distribution system, laboratory system and method of operating |
| JP6177886B2 (ja) * | 2012-05-11 | 2017-08-09 | シーメンス・ヘルスケア・ダイアグノスティックス・インコーポレーテッドSiemens Healthcare Diagnostics Inc. | 試料管を搬送する方法とシステム |
| EP2995580A1 (en) * | 2014-09-09 | 2016-03-16 | Roche Diagniostics GmbH | Laboratory sample distribution system and laboratory automation system |
| EP3073271A1 (en) * | 2015-03-23 | 2016-09-28 | Roche Diagniostics GmbH | Method of operating a laboratory automation system and laboratory automation system |
| JP6734989B2 (ja) * | 2016-07-21 | 2020-08-05 | シーメンス・ヘルスケア・ダイアグノスティックス・インコーポレーテッドSiemens Healthcare Diagnostics Inc. | オートメーショントラックのモニタリング及びメンテナンスに基づいて調節するシステム及び方法 |
| WO2018017771A1 (en) * | 2016-07-21 | 2018-01-25 | Siemens Healthcare Diagnostics Inc. | Automated clinical analyzer system and method |
| US12498388B2 (en) * | 2017-07-31 | 2025-12-16 | Siemens Healthcare Diagnostics Inc. | Methods and apparatus for imaging specimens and/or sample containers |
| EP3812044B1 (en) * | 2019-10-24 | 2021-11-17 | Roche Diagnostics GmbH | Sample container carrier with data carrier for an in-vitro diagnostics system |
-
2021
- 2021-03-16 JP JP2022555967A patent/JP7441967B2/ja active Active
- 2021-03-16 EP EP21770496.4A patent/EP4121732A4/en active Pending
- 2021-03-16 WO PCT/US2021/022636 patent/WO2021188596A1/en not_active Ceased
- 2021-03-16 US US17/906,554 patent/US20230146784A1/en active Pending
- 2021-03-16 CN CN202180021836.8A patent/CN115210551A/zh active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008249461A (ja) | 2007-03-30 | 2008-10-16 | Disk Tekku Kk | 分注検査装置 |
| JP2008286623A (ja) | 2007-05-17 | 2008-11-27 | Toppan Printing Co Ltd | 分注検査装置および検査方法 |
| JP2017077971A (ja) | 2011-11-04 | 2017-04-27 | エフ.ホフマン−ラ ロシュ アーゲーF. Hoffmann−La Roche Aktiengesellschaft | 研究室試料配送システムおよび対応する動作方法 |
| US20160011224A1 (en) | 2013-03-08 | 2016-01-14 | Siemens Healthcare Diagnostics Inc. | Surface markings for an optically guided device |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2021188596A1 (en) | 2021-09-23 |
| US20230146784A1 (en) | 2023-05-11 |
| EP4121732A1 (en) | 2023-01-25 |
| CN115210551A (zh) | 2022-10-18 |
| JP2023518933A (ja) | 2023-05-09 |
| EP4121732A4 (en) | 2023-12-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7441967B2 (ja) | 平面試料輸送を用いた小型臨床診断システム | |
| CN105247670B (zh) | 用于对齐衬底的装置和方法 | |
| US11818471B2 (en) | Unscanned optical inspection system using a micro camera array | |
| CA2897979C (en) | Automation tube positioning methodology | |
| CN114975213B (zh) | 一种晶圆对准装置及对准方法 | |
| KR101363591B1 (ko) | 자동 정렬 기능을 갖는 기판 이송 장치 | |
| US9099508B2 (en) | Method for automatic measurement and for teaching-in of location positions of objects within a substrate processing system by means of sensor carriers and associated sensor carrier | |
| US20240118300A1 (en) | Apparatus and methods for aligning a robotic arm with a sample tube carrier | |
| TW201827935A (zh) | 測量系統及基板處理系統、及元件製造方法 | |
| EP2753968A1 (en) | Imaging systems, cassettes, and methods of using the same | |
| KR20040093710A (ko) | 무선 기판형 센서 | |
| KR20160101187A (ko) | 위치 민감 기판 디바이스 | |
| KR20180132142A (ko) | 액체 핸들링을 위한 소모품 조작 | |
| US20210013074A1 (en) | Method of inspecting a semiconductor processing chamber using a vision sensor, and method for manufaturing a semiconductor device using the same | |
| JP7730913B2 (ja) | 診断検査室システムの構成要素を位置合わせする装置および方法 | |
| IL322834A (en) | Improving the accuracy of navigation to a measurement site in an X-ray system using a camera connected to the detector | |
| US6699425B1 (en) | Device and method for transferring microstructures | |
| HK40080926A (en) | Compact clinical diagnostics system with planar sample transport | |
| KR20220097138A (ko) | 반도체 패키지 절단 및 분류 장치 | |
| KR20220097139A (ko) | 반도체 패키지 검사 유닛 및 이를 포함하는 반도체 패키지 절단 및 분류 장치 | |
| WO2025222074A1 (en) | Vision based position feedback for substrate handlers | |
| EP4673752A1 (en) | Apparatus and method for automated teaching of locations in laboratory automation equipment | |
| Dabelow et al. | Automated vision-guided precision positioning in microassembly | |
| HK40001178A (en) | Measuring system, substrate processing system, and device manufacturing method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230926 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230927 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231226 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240123 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240219 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7441967 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |