JP7403246B2 - 画像復号装置、画像復号方法 - Google Patents
画像復号装置、画像復号方法 Download PDFInfo
- Publication number
- JP7403246B2 JP7403246B2 JP2019115751A JP2019115751A JP7403246B2 JP 7403246 B2 JP7403246 B2 JP 7403246B2 JP 2019115751 A JP2019115751 A JP 2019115751A JP 2019115751 A JP2019115751 A JP 2019115751A JP 7403246 B2 JP7403246 B2 JP 7403246B2
- Authority
- JP
- Japan
- Prior art keywords
- slice
- image
- brick
- information
- decoding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/46—Embedding additional information in the video signal during the compression process
- H04N19/463—Embedding additional information in the video signal during the compression process by compressing encoding parameters before transmission
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/70—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals characterised by syntax aspects related to video coding, e.g. related to compression standards
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/42—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals characterised by implementation details or hardware specially adapted for video compression or decompression, e.g. dedicated software implementation
- H04N19/436—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals characterised by implementation details or hardware specially adapted for video compression or decompression, e.g. dedicated software implementation using parallelised computational arrangements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/117—Filters, e.g. for pre-processing or post-processing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/119—Adaptive subdivision aspects, e.g. subdivision of a picture into rectangular or non-rectangular coding blocks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/124—Quantisation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/136—Incoming video signal characteristics or properties
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/172—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a picture, frame or field
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/174—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a slice, e.g. a line of blocks or a group of blocks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/80—Details of filtering operations specially adapted for video compression, e.g. for pixel interpolation
- H04N19/82—Details of filtering operations specially adapted for video compression, e.g. for pixel interpolation involving filtering within a prediction loop
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computing Systems (AREA)
- Theoretical Computer Science (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
- Compression Of Band Width Or Redundancy In Fax (AREA)
- Compression, Expansion, Code Conversion, And Decoders (AREA)
Description
先ず、本実施形態に係る画像符号化装置の機能構成例について、図1のブロック図を用いて説明する。画像分割部102には、符号化対象となる入力画像が入力される。入力画像は動画像を構成する各フレームの画像であっても良いし、静止画像であっても良い。画像分割部102は、入力画像を「一つもしくは複数のタイル」に分割する。タイルは入力画像内の矩形領域を覆う、連続する基本ブロックの集合である。画像分割部102はさらに、それぞれのタイルを一つもしくは複数のブリックに分割する。ブリックは、タイル内の一つもしくは複数の基本ブロックの行(基本ブロック行)で構成される矩形領域(タイル以下の大きさの複数のブロックから成るブロック行を1つ以上含む矩形領域)である。画像分割部102はさらに入力画像を、「一つまたは複数のタイル」あるいは「一つのタイル内の一つ以上のブリック」で構成されるスライスに分割する。スライスは符号化の基本単位であり、スライス毎にスライスの種類を示す情報等のヘッダ情報が付加される。入力画像を4個のタイル、4個のスライス、11個のブリックに分割する例を図7に示す。左上のタイルは1個のブリック、左下のタイルは2個のブリック、右上のタイルは5個のブリック、右下のタイルは3個のブリックにそれぞれ分割されている。そして左のスライスは3個のブリック、右上のスライスは2個のブリック、右中央のスライスは3個のブリック、右下のスライスは3個のブリックを包含するように構成されている。画像分割部102は、このようにして分割したタイル、ブリック、スライスのそれぞれについて、大きさに関する情報を分割情報として出力する。
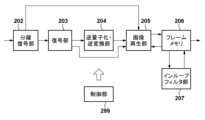
本実施形態では、第1の実施形態に係る画像符号化装置によって生成されたビットストリームを復号する画像復号装置について説明する。なお、ビットストリームの構成など、第1の実施形態と共通する要件については第1の実施形態にて説明したとおりであるため、説明は省略する。
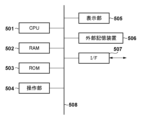
図1や図2に示した各機能部はハードウェアで実装しても良いが、一部をソフトウェアで実装しても良い。後者の場合、フレームメモリ108やフレームメモリ206を除く各機能部をソフトウェア(コンピュータプログラム)で実装しても良い。このようなコンピュータプログラムを実行可能なコンピュータ装置は、上記の画像符号化装置や画像復号装置に適用可能である。
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
Claims (7)
- 画像を複数のブロックから成るブロック行を1つ以上含む矩形領域に分割して符号化されたビットストリームから前記画像を復号する画像復号装置であって、
並列処理の有効化に関するentropy_coding_sync_enabled_flagを復号し、スライスが矩形状となる第1モードが使用されるか当該第1モードと異なるモードであってスライスに関する第2モードが使用されるかを示すrect_slice_flagを前記ビットストリームのピクチャパラメータセットから復号し、前記画像における矩形領域の垂直方向のブロック数に対応する第1情報を前記ピクチャパラメータセットから復号し、前記画像におけるスライスに含まれる矩形領域の数の第2情報を前記ビットストリームのスライスヘッダから復号し、前記画像が複数の矩形領域を含み且つ前記rect_slice_flagが前記第2モードが使用されることを示す場合においてスライスのアドレスを前記スライスヘッダから復号する復号手段と、
前記entropy_coding_sync_enabled_flagの値が1であり、前記rect_slice_flagが前記第2モードが使用されることを示す場合において、前記スライスのアドレスと、前記矩形領域の垂直方向におけるブロックの数に対応する前記第1情報と、前記スライスに含まれる矩形領域の数の前記第2情報と、に基づいて、前記スライスに対し、ブロック行の符号データの先頭位置を特定するための情報の数を特定する特定手段と
を備え、
前記復号手段は、前記特定手段によって特定した前記先頭位置を特定するための情報の数と、前記先頭位置を特定するための情報とに少なくとも基づいて、前記ブロック行の符号データを復号する
ことを特徴とする画像復号装置。 - 前記復号手段は、
前記矩形領域におけるそれぞれのブロック行を並列に復号可能であることを特徴とする請求項1に記載の画像復号装置。 - 前記画像は、動画像における各フレームの画像もしくは静止画像であることを特徴とする請求項1又は2に記載の画像復号装置。
- 前記スライスは、ラスタ順に並ぶタイルを含むことを特徴とする請求項1乃至3の何れか1項に記載の画像復号装置。
- 前記矩形領域はブリックであることを特徴とする請求項1乃至4の何れか1項に記載の画像復号装置。
- 画像を複数のブロックから成るブロック行を1つ以上含む矩形領域に分割して符号化されたビットストリームから前記画像を復号する画像復号方法であって、
並列処理の有効化に関するentropy_coding_sync_enabled_flagを復号し、スライスが矩形状となる第1モードが使用されるか当該第1モードと異なるモードであってスライスに関する第2モードが使用されるかを示すrect_slice_flagを前記ビットストリームのピクチャパラメータセットから復号し、前記画像における矩形領域の垂直方向のブロック数に対応する第1情報を前記ピクチャパラメータセットから復号し、前記画像におけるスライスに含まれる矩形領域の数の第2情報を前記ビットストリームのスライスヘッダから復号し、前記画像が複数の矩形領域を含み且つ前記rect_slice_flagが前記第2モードが使用されることを示す場合においてスライスのアドレスを前記スライスヘッダから復号する復号工程と、
前記entropy_coding_sync_enabled_flagの値が1であり、前記rect_slice_flagが前記第2モードが使用されることを示す場合において、前記スライスのアドレスと、前記矩形領域の垂直方向におけるブロックの数に対応する前記第1情報と、前記スライスに含まれる矩形領域の数の前記第2情報と、に基づいて、前記スライスに対し、ブロック行の符号データの先頭位置を特定するための情報の数を特定する特定工程と
を備え、
前記復号工程において、前記特定工程によって特定した前記先頭位置を特定するための情報の数と、前記先頭位置を特定するための情報とに少なくとも基づいて、前記ブロック行の符号データを復号する
ことを特徴とする画像復号方法。 - コンピュータに請求項6に記載の画像復号方法を実行させるためのコンピュータプログラム。
Priority Applications (14)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019115751A JP7403246B2 (ja) | 2019-06-21 | 2019-06-21 | 画像復号装置、画像復号方法 |
| CN202411325717.3A CN119211570A (zh) | 2019-06-21 | 2020-05-28 | 图像编码设备、图像编码方法、图像解码设备和图像解码方法 |
| CN202411325723.9A CN119211572A (zh) | 2019-06-21 | 2020-05-28 | 图像编码设备、图像编码方法、图像解码设备和图像解码方法 |
| PCT/JP2020/021183 WO2020255667A1 (ja) | 2019-06-21 | 2020-05-28 | 画像符号化装置、画像復号装置、画像符号化方法、画像復号方法 |
| KR1020227001087A KR102668065B1 (ko) | 2019-06-21 | 2020-05-28 | 화상 부호화 장치, 화상 복호 장치, 화상 부호화 방법, 화상 복호 방법, 컴퓨터 프로그램을 저장한 비일시적 컴퓨터-판독가능 저장 매체 |
| CN202080045361.1A CN114051731B (zh) | 2019-06-21 | 2020-05-28 | 图像编码设备和方法、图像解码设备和方法以及存储介质 |
| CN202411325719.2A CN119211571A (zh) | 2019-06-21 | 2020-05-28 | 图像编码设备、图像编码方法、图像解码设备和图像解码方法 |
| CN202411325726.2A CN119211573A (zh) | 2019-06-21 | 2020-05-28 | 图像编码设备、图像编码方法、图像解码设备和图像解码方法 |
| CN202411325727.7A CN119211574A (zh) | 2019-06-21 | 2020-05-28 | 图像编码设备、图像编码方法、图像解码设备和图像解码方法 |
| TW112118744A TWI853577B (zh) | 2019-06-21 | 2020-06-09 | 圖像編碼裝置、圖像解碼裝置、圖像編碼方法、圖像解碼方法 |
| TW109119257A TWI805926B (zh) | 2019-06-21 | 2020-06-09 | 圖像編碼裝置、圖像解碼裝置、圖像編碼方法、圖像解碼方法 |
| US17/556,480 US12549754B2 (en) | 2019-06-21 | 2021-12-20 | Image encoding apparatus and image decoding apparatus for generating a bitstream to derive information |
| JP2023208813A JP7748440B2 (ja) | 2019-06-21 | 2023-12-11 | 画像符号化装置、画像復号装置、画像符号化方法、画像復号方法 |
| JP2025155285A JP2025176185A (ja) | 2019-06-21 | 2025-09-18 | 画像符号化装置、画像復号装置、画像符号化方法、画像復号方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019115751A JP7403246B2 (ja) | 2019-06-21 | 2019-06-21 | 画像復号装置、画像復号方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023208813A Division JP7748440B2 (ja) | 2019-06-21 | 2023-12-11 | 画像符号化装置、画像復号装置、画像符号化方法、画像復号方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2021002775A JP2021002775A (ja) | 2021-01-07 |
| JP2021002775A5 JP2021002775A5 (ja) | 2022-06-29 |
| JP7403246B2 true JP7403246B2 (ja) | 2023-12-22 |
Family
ID=73994334
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019115751A Active JP7403246B2 (ja) | 2019-06-21 | 2019-06-21 | 画像復号装置、画像復号方法 |
| JP2023208813A Active JP7748440B2 (ja) | 2019-06-21 | 2023-12-11 | 画像符号化装置、画像復号装置、画像符号化方法、画像復号方法 |
| JP2025155285A Pending JP2025176185A (ja) | 2019-06-21 | 2025-09-18 | 画像符号化装置、画像復号装置、画像符号化方法、画像復号方法 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023208813A Active JP7748440B2 (ja) | 2019-06-21 | 2023-12-11 | 画像符号化装置、画像復号装置、画像符号化方法、画像復号方法 |
| JP2025155285A Pending JP2025176185A (ja) | 2019-06-21 | 2025-09-18 | 画像符号化装置、画像復号装置、画像符号化方法、画像復号方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US12549754B2 (ja) |
| JP (3) | JP7403246B2 (ja) |
| KR (1) | KR102668065B1 (ja) |
| CN (6) | CN119211574A (ja) |
| TW (2) | TWI853577B (ja) |
| WO (1) | WO2020255667A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USD984446S1 (en) * | 2021-09-27 | 2023-04-25 | HUM Systems GmbH | Communication equipment |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019078169A1 (ja) | 2017-10-20 | 2019-04-25 | シャープ株式会社 | 動画像符号化装置及び動画像復号装置 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007166665A (ja) * | 1995-09-29 | 2007-06-28 | Toshiba Corp | 画像復号化方法及び装置 |
| US8988531B2 (en) | 2010-07-08 | 2015-03-24 | Texas Instruments Incorporated | Method and apparatus for sub-picture based raster scanning coding order |
| US10349077B2 (en) * | 2011-11-21 | 2019-07-09 | Canon Kabushiki Kaisha | Image coding apparatus, image coding method, image decoding apparatus, image decoding method, and storage medium |
| CN107257490B (zh) | 2012-01-27 | 2019-12-17 | 太阳专利托管公司 | 图像编码方法及图像编码装置 |
| CN104205819B (zh) | 2012-02-01 | 2017-06-30 | 诺基亚技术有限公司 | 用于视频编码的方法和装置 |
| JP6295951B2 (ja) * | 2012-06-25 | 2018-03-20 | ソニー株式会社 | 画像復号装置及び画像復号方法 |
| JP6080405B2 (ja) | 2012-06-29 | 2017-02-15 | キヤノン株式会社 | 画像符号化装置、画像符号化方法及びプログラム、画像復号装置、画像復号方法及びプログラム |
| JP2014011726A (ja) | 2012-07-02 | 2014-01-20 | Canon Inc | 画像符号化装置、画像符号化方法及びプログラム、画像復号装置、画像復号方法及びプログラム |
| US9998764B2 (en) | 2012-07-09 | 2018-06-12 | Vid Scale, Inc. | Codec architecture for multiple layer video coding |
| US9319703B2 (en) | 2012-10-08 | 2016-04-19 | Qualcomm Incorporated | Hypothetical reference decoder parameter syntax structure |
| US9661341B2 (en) | 2013-01-07 | 2017-05-23 | Microsoft Technology Licensing, Llc | Syntax and semantics for buffering information to simplify video splicing |
| US9467707B2 (en) | 2013-03-05 | 2016-10-11 | Qualcomm Incorporated | Parallel processing for video coding |
| JP6327412B2 (ja) | 2013-04-12 | 2018-05-23 | 三菱重工エンジニアリング株式会社 | 交通システム、及び給電方法 |
| GB2532420A (en) * | 2014-11-18 | 2016-05-25 | Sony Corp | Data encoding and decoding |
| CN114786009B (zh) * | 2016-03-16 | 2025-07-08 | 寰发股份有限公司 | 视频编码中限制块尺寸的视频数据处理方法与装置 |
| JP2018088600A (ja) | 2016-11-28 | 2018-06-07 | キヤノン株式会社 | 画像処理装置、画像処理方法及びプログラム |
| KR102206084B1 (ko) | 2017-07-07 | 2021-01-21 | 삼성전자주식회사 | 적응적 움직임 벡터 해상도로 결정된 움직임 벡터의 부호화 장치 및 부호화 방법, 및 움직임 벡터의 복호화 장치 및 복호화 방법 |
| TWI792578B (zh) | 2018-07-09 | 2023-02-11 | 弗勞恩霍夫爾協會 | 用於經編碼圖像多樣化空間劃分之編碼器、解碼器、編碼方法及解碼方法 |
| CN116684587A (zh) | 2018-10-05 | 2023-09-01 | Lg电子株式会社 | 图像解码、编码方法及针对图像的数据的发送方法 |
| KR102805514B1 (ko) | 2019-04-10 | 2025-05-08 | 후아웨이 테크놀러지 컴퍼니 리미티드 | 비디오 코딩에서 슬라이스 엔트리 포인트 |
| MY208561A (en) * | 2019-04-25 | 2025-05-15 | Op Solutions Llc | Candidates in frames with global motion |
| JP2024533258A (ja) | 2021-09-29 | 2024-09-12 | アリババ ダモ (ハンジョウ) テクノロジー カンパニー,リミテッド | ビデオ符号化における変換係数の残差符号予測の改良 |
-
2019
- 2019-06-21 JP JP2019115751A patent/JP7403246B2/ja active Active
-
2020
- 2020-05-28 CN CN202411325727.7A patent/CN119211574A/zh active Pending
- 2020-05-28 CN CN202411325723.9A patent/CN119211572A/zh active Pending
- 2020-05-28 CN CN202411325717.3A patent/CN119211570A/zh active Pending
- 2020-05-28 KR KR1020227001087A patent/KR102668065B1/ko active Active
- 2020-05-28 WO PCT/JP2020/021183 patent/WO2020255667A1/ja not_active Ceased
- 2020-05-28 CN CN202411325726.2A patent/CN119211573A/zh active Pending
- 2020-05-28 CN CN202411325719.2A patent/CN119211571A/zh active Pending
- 2020-05-28 CN CN202080045361.1A patent/CN114051731B/zh active Active
- 2020-06-09 TW TW112118744A patent/TWI853577B/zh active
- 2020-06-09 TW TW109119257A patent/TWI805926B/zh active
-
2021
- 2021-12-20 US US17/556,480 patent/US12549754B2/en active Active
-
2023
- 2023-12-11 JP JP2023208813A patent/JP7748440B2/ja active Active
-
2025
- 2025-09-18 JP JP2025155285A patent/JP2025176185A/ja active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019078169A1 (ja) | 2017-10-20 | 2019-04-25 | シャープ株式会社 | 動画像符号化装置及び動画像復号装置 |
Non-Patent Citations (3)
| Title |
|---|
| BROSS, Benjamin et al.,Versatile Video Coding (Draft 5),Joint Video Experts Team (JVET) of ITU-T SG 16 WP 3 and ISO/IEC JTC 1/SC 29/WG 11 14th Meeting: Geneva, CH, 19-27 Mar. 2019, [JVET-N1001-v8],JVET-N1001 (version 8),ITU-T,2019年06月11日,<URL:https://jvet-experts.org/doc_end_user/documents/14_Geneva/wg11/JVET-N1001-v8.zip>: JVET-N1001-v8.docx: pp.18-20,35-37,40-43,81-85,89-97 |
| BROSS, Benjamin et al.,Versatile Video Coding (Draft 6),Joint Vide o Experts Team (JVET) of ITU-T SG 16 WP 3 and ISO/IEC JTC 1/SC 29/WG 11 15th Meeting: Gothenburg, SE, 3-12 July 2019, [JVET-O2001-v7],JVET-O2001 (version 7),ITU-T,2019年07月15日,<URL:https://jvet-experts.org/doc_end_user/documents/15_Gothenburg/wg11/JVET-O2001-v7.zip>: JVET-O2001-v7.docx: pp.19-21,37-40,45-49,90-96,108-117 |
| WANG, Ye-Kui and Hendry,AHG12: Miscellaneous AHG12 topics,Joint Video Experts Team (JVET) of ITU-T SG 16 WP 3 and ISO/IEC JTC 1/SC 29/WG 11 15th Meeting: Gothernburg, SE, 3-12 July 2019, [JVET-O0145-v1],JVET-O0145 (version 1),ITU-T,2019年06月20日,<URL:https://jvet-experts.org/doc_end_user/documents/15_Gothenburg/wg11/JVET-O0145-v1.zip>: JVET-O014 5-v1.docx: pp.1-3 |
Also Published As
| Publication number | Publication date |
|---|---|
| TW202339505A (zh) | 2023-10-01 |
| JP7748440B2 (ja) | 2025-10-02 |
| TWI805926B (zh) | 2023-06-21 |
| TW202101995A (zh) | 2021-01-01 |
| US20220116640A1 (en) | 2022-04-14 |
| US12549754B2 (en) | 2026-02-10 |
| KR102668065B1 (ko) | 2024-05-23 |
| JP2024019496A (ja) | 2024-02-09 |
| JP2021002775A (ja) | 2021-01-07 |
| CN114051731B (zh) | 2024-10-01 |
| TWI853577B (zh) | 2024-08-21 |
| CN114051731A (zh) | 2022-02-15 |
| CN119211573A (zh) | 2024-12-27 |
| CN119211571A (zh) | 2024-12-27 |
| CN119211572A (zh) | 2024-12-27 |
| CN119211574A (zh) | 2024-12-27 |
| KR20220019289A (ko) | 2022-02-16 |
| CN119211570A (zh) | 2024-12-27 |
| JP2025176185A (ja) | 2025-12-03 |
| WO2020255667A1 (ja) | 2020-12-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7403245B2 (ja) | 画像復号装置、画像復号方法 | |
| JP2025176185A (ja) | 画像符号化装置、画像復号装置、画像符号化方法、画像復号方法 | |
| JP7703083B2 (ja) | 画像符号化装置、画像復号装置、画像符号化方法、画像復号方法 | |
| JP7834226B2 (ja) | 画像復号装置、画像復号方法 | |
| HK40113998A (zh) | 图像编码设备、图像编码方法、图像解码设备和图像解码方法 | |
| HK40113651A (zh) | 图像编码设备、图像编码方法、图像解码设备和图像解码方法 | |
| HK40113654A (zh) | 图像编码设备、图像编码方法、图像解码设备和图像解码方法 | |
| HK40113999A (zh) | 图像编码设备、图像编码方法、图像解码设备和图像解码方法 | |
| HK40113652A (zh) | 图像编码设备、图像编码方法、图像解码设备和图像解码方法 | |
| HK40114611A (zh) | 图像编码设备、图像编码方法、图像解码设备和图像解码方法 | |
| HK40114609A (zh) | 图像编码设备、图像编码方法、图像解码设备和图像解码方法 | |
| HK40115801A (zh) | 图像编码设备、图像编码方法、图像解码设备和图像解码方法 | |
| HK40114256A (zh) | 图像编码设备、图像编码方法、图像解码设备和图像解码方法 | |
| HK40114257A (zh) | 图像编码设备、图像编码方法、图像解码设备和图像解码方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20210103 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210113 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220621 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220621 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230605 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230803 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231113 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231212 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7403246 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |