JP7389728B2 - 油圧ショベル駆動システム - Google Patents
油圧ショベル駆動システム Download PDFInfo
- Publication number
- JP7389728B2 JP7389728B2 JP2020151599A JP2020151599A JP7389728B2 JP 7389728 B2 JP7389728 B2 JP 7389728B2 JP 2020151599 A JP2020151599 A JP 2020151599A JP 2020151599 A JP2020151599 A JP 2020151599A JP 7389728 B2 JP7389728 B2 JP 7389728B2
- Authority
- JP
- Japan
- Prior art keywords
- switching valve
- boom
- line
- pump
- vehicle body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000010720 hydraulic oil Substances 0.000 claims description 37
- 230000008929 regeneration Effects 0.000 claims description 22
- 238000011069 regeneration method Methods 0.000 claims description 22
- 230000006870 function Effects 0.000 claims description 8
- 230000001172 regenerating effect Effects 0.000 claims description 6
- 238000005336 cracking Methods 0.000 claims description 3
- 230000007935 neutral effect Effects 0.000 description 5
- 238000006073 displacement reaction Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 238000005381 potential energy Methods 0.000 description 2
- 239000003990 capacitor Substances 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000007659 motor function Effects 0.000 description 1
- 239000003921 oil Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
Images



Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/425—Drive systems for dipper-arms, backhoes or the like
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2217—Hydraulic or pneumatic drives with energy recovery arrangements, e.g. using accumulators, flywheels
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
- E02F3/435—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
- E02F9/2095—Control of electric, electro-mechanical or mechanical equipment not otherwise provided for, e.g. ventilators, electro-driven fans
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2225—Control of flow rate; Load sensing arrangements using pressure-compensating valves
- E02F9/2228—Control of flow rate; Load sensing arrangements using pressure-compensating valves including an electronic controller
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2292—Systems with two or more pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/02—Systems essentially incorporating special features for controlling the speed or actuating force of an output member
- F15B11/024—Systems essentially incorporating special features for controlling the speed or actuating force of an output member by means of differential connection of the servomotor lines, e.g. regenerative circuits
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/02—Systems essentially incorporating special features for controlling the speed or actuating force of an output member
- F15B11/028—Systems essentially incorporating special features for controlling the speed or actuating force of an output member for controlling the actuating force
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/16—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors
- F15B11/17—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors using two or more pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B21/00—Common features of fluid actuator systems; Fluid-pressure actuator systems or details thereof, not covered by any other group of this subclass
- F15B21/14—Energy-recuperation means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6306—Electronic controllers using input signals representing a pressure
- F15B2211/6313—Electronic controllers using input signals representing a pressure the pressure being a load pressure
Description
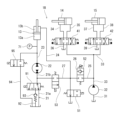
図1に、本発明の第1実施形態に係る油圧ショベル駆動システム1Aを示し、図2に、その駆動システム1Aが搭載された油圧ショベル10を示す。
前記実施形態では、第2切換弁52が、ブーム下げ操作時に閉位置に位置するが、ブーム下げ操作時に開位置に位置してもよい。ブーム下げ操作時にロッド側室13bへの作動油の吸い込みが不足するとキャビテーションを引き起こす。従って、ブーム下げ操作時に第2切換弁52を開位置に切り換えて第2ポンプ32から吐出される作動油(圧油)をロッド側室13bへ供給すれば、そのようなキャビテーションを防止することができる。
図3に、本発明の第2実施形態に係る油圧ショベル駆動システム1Bを示す。なお、本実施形態において、第1実施形態と同一構成要素には同一符号を付し、重複した説明は省略する。また、図3では、第1電動機61、第2電動機62および制御装置7などの作図を省略する。
本発明は上述した実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で種々の変形が可能である。
本発明の油圧ショベル駆動システムは、ブームシリンダと、ヘッド側ラインにより前記ブームシリンダのヘッド側室と接続された、電動機により駆動される第1ポンプと、アームシリンダとバケットシリンダの少なくとも一方へ作動油を供給する第2ポンプと、前記ブームシリンダのロッド側室を前記タンクと接続するロッド側ラインに設けられた、ブーム上げ操作時に前記ロッド側ラインを開放し、車体持上げ操作時に前記ロッド側ラインをブロックする第1切換弁と、前記ロッド側ラインにおける前記ロッド側室と前記第1切換弁の間の部分を前記第2ポンプから延びる供給ラインと接続する中継ラインに設けられた、ブーム上げ操作時に前記中継ラインをブロックし、車体持上げ操作時に前記中継ラインを開放する第2切換弁と、を備える、ことを特徴とする。
10 油圧ショベル
13 ブームシリンダ
13a ヘッド側室
13b ロッド側室
14 アームシリンダ
15 バケットシリンダ
21 吸入吐出ライン
21a タンク側流路
21b ポンプ側流路
22 第1ポンプ
23 ヘッド側ライン
24 ロッド側ライン
25 中継ライン
26 逆止弁
27 再生ライン
32 第2ポンプ
33 供給ライン
51 第1切換弁
52 第2切換弁
53 第3切換弁
61 第1電動機
62 第2電動機
7 制御装置
71 圧力センサ
81 ブーム操作装置
82 アーム操作装置
83 バケット操作装置
91 第4切換弁
92 パラレルライン
93 逆止弁
94 バイパスライン
95 車体持上げ用切換弁
Claims (11)
- ブームシリンダと、
ヘッド側ラインにより前記ブームシリンダのヘッド側室と接続された、電動機により駆
動される第1ポンプと、
アームシリンダとバケットシリンダの少なくとも一方へ作動油を供給する第2ポンプと
、
前記ブームシリンダのロッド側室をタンクと接続するロッド側ラインに設けられた
、ブーム上げ操作時に前記ロッド側ラインを開放し、車体持上げ操作時に前記ロッド側ラ
インをブロックする第1切換弁と、
前記ロッド側ラインにおける前記ロッド側室と前記第1切換弁の間の部分を前記第2ポ
ンプから延びる供給ラインと接続する中継ラインに設けられた、ブーム上げ操作時に前記
中継ラインをブロックし、車体持上げ操作時に前記中継ラインを開放する第2切換弁と、
を備える、油圧ショベル駆動システム。 - 前記第2切換弁は、ブーム上げ操作時およびブーム下げ操作時に前記中継ラインをブロックする閉位置に位置し、車体持上げ操作時に前記中継ラインを開放する開位置に位置する、請求項1に記載の油圧ショベル駆動システム。
- ブーム上げ方向およびブーム下げ方向に操作される操作レバーを含むブーム操作装置と、
前記電動機および前記第2切換弁を制御する制御装置と、を備え、
前記制御装置は、前記ブーム操作装置の操作レバーがブーム下げ方向に操作されている間に前記電動機により生成される回生電流が所定値を下回ったときに、車体持上げ操作が開始されたと判定し、前記第2切換弁を前記閉位置から前記開位置へ切り換える、請求項2に記載の油圧ショベル駆動システム。 - ブーム上げ方向およびブーム下げ方向に操作される操作レバーを含むブーム操作装置と、
前記ブームシリンダのヘッド側室の圧力を検出する圧力センサと、
前記電動機および前記第2切換弁を制御する制御装置と、を備え、
前記制御装置は、前記ブーム操作装置の操作レバーがブーム下げ方向に操作されている間に前記圧力センサで検出される圧力が所定値を下回ったときに、車体持上げ操作が開始されたと判定し、前記第2切換弁を前記閉位置から前記開位置へ切り換える、請求項2に記載の油圧ショベル駆動システム。 - 前記第2切換弁は、ブーム上げ操作時に前記中継ラインをブロックする閉位置に位置し、ブーム下げ操作時および車体持上げ操作時に前記中継ラインを開放する開位置に位置し、
前記第1切換弁は、ブーム下げ操作時に前記ロッド側ラインをブロックする、請求項1に記載の油圧ショベル駆動システム。 - ブーム操作装置、アーム操作装置およびバケット操作装置と、
前記電動機および前記第2切換弁を制御する制御装置と、を備え、
前記第2切換弁は、前記中継ラインを開放する開位置では開口面積が変更可能に構成されており、
前記制御装置は、前記第2切換弁が前記開位置に位置するとき、前記アーム操作装置と前記バケット操作装置のどちらもが操作されない場合は前記第2切換弁の前記開口面積が最大となり、前記アーム操作装置と前記バケット操作装置のどちらかが操作される場合は前記第2切換弁が絞りとして機能するように、前記第2切換弁を制御する、請求項1~5の何れか一項に記載の油圧ショベル駆動システム。 - ブーム上げ方向およびブーム下げ方向に操作される操作レバーを含むブーム操作装置と、
前記電動機を制御するとともに前記第2ポンプの吐出流量を調整する制御装置と、を備え、
前記制御装置は、車体持上げ操作時に、前記ブーム操作装置の操作レバーの操作量に応じて前記第2ポンプの吐出流量を調整する、請求項1~6の何れか一項に記載の油圧ショベル駆動システム。 - 前記第2切換弁または前記中継ラインには、少なくとも車体持上げ操作時に前記供給ラインから前記ロッド側ラインへ向かう流れは許容するがその逆の流れは禁止する逆止弁が設けられている、請求項1~7の何れか一項に記載の油圧ショベル駆動システム。
- 前記第1ポンプは、吸入吐出ラインにより前記タンクと接続されており、
前記吸入吐出ラインを前記ロッド側ラインにおける前記ロッド側室と前記第1切換弁の間の部分と接続する再生ラインに設けられた、ブーム下げ操作時に前記再生ラインを開放し、ブーム下げ操作時以外に前記再生ラインをブロックする第3切換弁を備え、
前記第1切換弁は、ブーム下げ操作時に前記ロッド側ラインをブロックする、請求項1~8の何れか一項に記載の油圧ショベル駆動システム。 - 前記吸入吐出ラインには、当該吸入吐出ラインをタンク側流路とポンプ側流路とに分断するように第4切換弁が設けられており、前記再生ラインは、前記吸入吐出ラインの前記ポンプ側流路を前記ロッド側ラインにおける前記ロッド側室と前記第1切換弁の間の部分と接続し、
前記第4切換弁は、所定のクラッキング圧を有する逆止弁が設けられたパラレルラインにより前記タンクと接続されており、
前記第4切換弁は、ブーム下げ操作時に前記ポンプ側流路を前記パラレルラインと連通させ、ブーム下げ操作時以外に前記ポンプ側流路を前記タンク側流路と連通させる、請求項9に記載の油圧ショベル駆動システム。 - 前記ヘッド側ラインを前記タンクと接続するバイパスラインに設けられた、車体持上げ操作時に前記バイパスラインを開放し、車体持上げ操作時以外に前記バイパスラインをブロックする車体持上げ用切換弁を備える、請求項1~10の何れか一項に記載の油圧ショベル駆動システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020151599A JP7389728B2 (ja) | 2020-09-09 | 2020-09-09 | 油圧ショベル駆動システム |
| CN202180053803.1A CN116194677A (zh) | 2020-09-09 | 2021-07-29 | 液压挖掘机驱动系统 |
| US18/022,664 US11926986B2 (en) | 2020-09-09 | 2021-07-29 | Hydraulic excavator drive system |
| PCT/JP2021/028115 WO2022054449A1 (ja) | 2020-09-09 | 2021-07-29 | 油圧ショベル駆動システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020151599A JP7389728B2 (ja) | 2020-09-09 | 2020-09-09 | 油圧ショベル駆動システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2022045808A JP2022045808A (ja) | 2022-03-22 |
| JP2022045808A5 JP2022045808A5 (ja) | 2023-06-19 |
| JP7389728B2 true JP7389728B2 (ja) | 2023-11-30 |
Family
ID=80632518
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020151599A Active JP7389728B2 (ja) | 2020-09-09 | 2020-09-09 | 油圧ショベル駆動システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11926986B2 (ja) |
| JP (1) | JP7389728B2 (ja) |
| CN (1) | CN116194677A (ja) |
| WO (1) | WO2022054449A1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011231823A (ja) | 2010-04-26 | 2011-11-17 | Hitachi Constr Mach Co Ltd | 油圧作業機のハイブリッド駆動回路 |
| JP2012241803A (ja) | 2011-05-19 | 2012-12-10 | Hitachi Constr Mach Co Ltd | 作業機械の油圧駆動装置 |
| WO2013125079A1 (ja) | 2012-02-23 | 2013-08-29 | 株式会社小松製作所 | 油圧駆動システム |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005315312A (ja) | 2004-04-28 | 2005-11-10 | Sumitomo (Shi) Construction Machinery Manufacturing Co Ltd | 建設機械の油圧シリンダ駆動装置 |
| WO2006132031A1 (ja) * | 2005-06-06 | 2006-12-14 | Shin Caterpillar Mitsubishi Ltd. | 旋回用駆動装置および作業機械 |
| US7634911B2 (en) * | 2007-06-29 | 2009-12-22 | Caterpillar Inc. | Energy recovery system |
| US9290912B2 (en) * | 2012-10-31 | 2016-03-22 | Caterpillar Inc. | Energy recovery system having integrated boom/swing circuits |
| KR102510852B1 (ko) * | 2015-12-04 | 2023-03-16 | 현대두산인프라코어 주식회사 | 건설기계의 유압 시스템 및 유압 제어 방법 |
| KR102309862B1 (ko) * | 2017-04-10 | 2021-10-08 | 두산인프라코어 주식회사 | 건설 기계의 유압 시스템 |
| KR102633378B1 (ko) * | 2019-02-13 | 2024-02-02 | 에이치디현대인프라코어 주식회사 | 건설 기계 |
| GB2593488A (en) * | 2020-03-24 | 2021-09-29 | Bamford Excavators Ltd | Hydraulic system |
| JP2021181789A (ja) * | 2020-05-18 | 2021-11-25 | 川崎重工業株式会社 | 油圧ショベル駆動システム |
| JP7461802B2 (ja) * | 2020-06-10 | 2024-04-04 | 川崎重工業株式会社 | 油圧ショベル駆動システム |
-
2020
- 2020-09-09 JP JP2020151599A patent/JP7389728B2/ja active Active
-
2021
- 2021-07-29 CN CN202180053803.1A patent/CN116194677A/zh active Pending
- 2021-07-29 US US18/022,664 patent/US11926986B2/en active Active
- 2021-07-29 WO PCT/JP2021/028115 patent/WO2022054449A1/ja active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011231823A (ja) | 2010-04-26 | 2011-11-17 | Hitachi Constr Mach Co Ltd | 油圧作業機のハイブリッド駆動回路 |
| JP2012241803A (ja) | 2011-05-19 | 2012-12-10 | Hitachi Constr Mach Co Ltd | 作業機械の油圧駆動装置 |
| WO2013125079A1 (ja) | 2012-02-23 | 2013-08-29 | 株式会社小松製作所 | 油圧駆動システム |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2022054449A1 (ja) | 2022-03-17 |
| CN116194677A (zh) | 2023-05-30 |
| US11926986B2 (en) | 2024-03-12 |
| US20230313487A1 (en) | 2023-10-05 |
| JP2022045808A (ja) | 2022-03-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101932304B1 (ko) | 작업 기계의 유압 구동 장치 | |
| JP6005185B2 (ja) | 建設機械の油圧駆動装置 | |
| WO2021235207A1 (ja) | 油圧ショベル駆動システム | |
| JP6013503B2 (ja) | 建設機械 | |
| JP6450487B1 (ja) | 油圧ショベル駆動システム | |
| KR101747519B1 (ko) | 하이브리드식 건설 기계 | |
| JP6891079B2 (ja) | 建設機械の油圧駆動システム | |
| JP7377022B2 (ja) | 建設機械の油圧システム | |
| JP7461802B2 (ja) | 油圧ショベル駆動システム | |
| JP2008275100A (ja) | 建設車両 | |
| JP7389728B2 (ja) | 油圧ショベル駆動システム | |
| WO2022172636A1 (ja) | 油圧ショベル駆動システム | |
| WO2020071044A1 (ja) | 油圧ショベル駆動システム | |
| JP2024002331A (ja) | 液圧駆動装置 | |
| JP2024002329A (ja) | 液圧駆動装置 | |
| JP2024002330A (ja) | 液圧駆動装置 | |
| JP2018150744A (ja) | 油圧回路 | |
| JP2013044398A (ja) | 油圧駆動システム | |
| JP2021021406A (ja) | 建設機械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230608 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230608 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231024 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231117 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7389728 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |