JP7345680B2 - 推論装置、推論方法及び推論プログラム - Google Patents
推論装置、推論方法及び推論プログラム Download PDFInfo
- Publication number
- JP7345680B2 JP7345680B2 JP2022562623A JP2022562623A JP7345680B2 JP 7345680 B2 JP7345680 B2 JP 7345680B2 JP 2022562623 A JP2022562623 A JP 2022562623A JP 2022562623 A JP2022562623 A JP 2022562623A JP 7345680 B2 JP7345680 B2 JP 7345680B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- inference
- feature
- dimensional position
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 26
- 238000001514 detection method Methods 0.000 claims description 82
- 238000000605 extraction Methods 0.000 claims description 58
- 238000004458 analytical method Methods 0.000 claims description 47
- 238000006243 chemical reaction Methods 0.000 claims description 44
- 230000002123 temporal effect Effects 0.000 claims description 29
- 239000000284 extract Substances 0.000 claims description 9
- 239000013598 vector Substances 0.000 description 62
- 238000010586 diagram Methods 0.000 description 14
- 238000013527 convolutional neural network Methods 0.000 description 11
- 230000005856 abnormality Effects 0.000 description 9
- 238000005070 sampling Methods 0.000 description 8
- 238000013528 artificial neural network Methods 0.000 description 6
- 238000013500 data storage Methods 0.000 description 6
- 230000002159 abnormal effect Effects 0.000 description 2
- 239000002131 composite material Substances 0.000 description 2
- 230000000306 recurrent effect Effects 0.000 description 2
- 230000000630 rising effect Effects 0.000 description 2
- 230000011218 segmentation Effects 0.000 description 2
- 101000911772 Homo sapiens Hsc70-interacting protein Proteins 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000011176 pooling Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
- G06T7/74—Determining position or orientation of objects or cameras using feature-based methods involving reference images or patches
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
- G06T7/75—Determining position or orientation of objects or cameras using feature-based methods involving models
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N5/00—Computing arrangements using knowledge-based models
- G06N5/04—Inference or reasoning models
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/70—Denoising; Smoothing
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/11—Region-based segmentation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/269—Analysis of motion using gradient-based methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/277—Analysis of motion involving stochastic approaches, e.g. using Kalman filters
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/77—Determining position or orientation of objects or cameras using statistical methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/62—Extraction of image or video features relating to a temporal dimension, e.g. time-based feature extraction; Pattern tracking
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/75—Organisation of the matching processes, e.g. simultaneous or sequential comparisons of image or video features; Coarse-fine approaches, e.g. multi-scale approaches; using context analysis; Selection of dictionaries
- G06V10/751—Comparing pixel values or logical combinations thereof, or feature values having positional relevance, e.g. template matching
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/764—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using classification, e.g. of video objects
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/77—Processing image or video features in feature spaces; using data integration or data reduction, e.g. principal component analysis [PCA] or independent component analysis [ICA] or self-organising maps [SOM]; Blind source separation
- G06V10/7715—Feature extraction, e.g. by transforming the feature space, e.g. multi-dimensional scaling [MDS]; Mappings, e.g. subspace methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/77—Processing image or video features in feature spaces; using data integration or data reduction, e.g. principal component analysis [PCA] or independent component analysis [ICA] or self-organising maps [SOM]; Blind source separation
- G06V10/774—Generating sets of training patterns; Bootstrap methods, e.g. bagging or boosting
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/82—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using neural networks
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/40—Scenes; Scene-specific elements in video content
- G06V20/44—Event detection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/52—Surveillance or monitoring of activities, e.g. for recognising suspicious objects
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20076—Probabilistic image processing
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20081—Training; Learning
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20084—Artificial neural networks [ANN]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30181—Earth observation
- G06T2207/30192—Weather; Meteorology
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Evolutionary Computation (AREA)
- Software Systems (AREA)
- Computing Systems (AREA)
- Artificial Intelligence (AREA)
- Databases & Information Systems (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Health & Medical Sciences (AREA)
- Bioinformatics & Computational Biology (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Evolutionary Biology (AREA)
- Probability & Statistics with Applications (AREA)
- Computational Linguistics (AREA)
- Data Mining & Analysis (AREA)
- General Engineering & Computer Science (AREA)
- Mathematical Physics (AREA)
- Image Analysis (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
センサ群は、自律移動装置における現在の状態を検知する。制御部は、センサ群から、検知開始時点から現時点までのセンサデータである時系列データを取得する。制御部は、時系列データを第1所定間隔毎に分割することで、複数の分割データを生成し、複数の分割データと時系列データとから複数のグラフを生成する。また、制御部は、複数のグラフを学習モデルに与えて、学習モデルから、異常発生の検知結果を取得する。異常発生の検知結果の中には、自律移動装置の異常な位置が含まれている。
特許文献1に開示されている異常検知方法では、自然環境の状態がどのように変化しても、自律移動装置の異常発生を検知できるようにするには、自律移動装置の航行時に想定される、全ての自然環境の状態を考慮して、学習モデルを学習させる必要がある。しかしながら、全ての自然環境の状態を考慮して、学習モデルを学習させるには、極めて膨大な学習データを用意する必要があり、現実的には、十分な学習データを用意することができないことがある。このため、当該異常検知方法では、自然環境の状態によっては、自律移動装置の異常発生を検知できないことがあるという課題があった。
図1は、実施の形態1に係る推論装置4を示す構成図である。
図2は、実施の形態1に係る推論装置4のハードウェアを示すハードウェア構成図である。
図1において、モデル記憶部1は、例えば、ハードディスク、又は、RAM(Random Access Memory)によって実現される。
モデル記憶部1は、第1の学習モデル1aを記憶している。
学習モデル1aは、学習時に、学習データとして、学習用画像を示す画像信号が与えられて、学習用画像の学習が済んでいる。学習用画像は、例えば、画像認識タスクに用いられる画像である。
学習用画像のドメインである画像の種類は、どのようなものでもよく、学習用画像は、例えば、RGB画像、TIR画像、又は、CGシミュレータによって生成された画像のいずれかである。
図1に示す推論装置4では、説明の便宜上、学習用画像がRGB画像であるものとして説明する。学習モデル1aは、大量のRGB画像が与えられて、RGB画像を学習しているものである。
学習モデル1aは、後述する特徴量抽出部12から、学習用画像と画像のドメイン及び認識タスクのそれぞれが異なる場合において、検知対象物体が映っている画像である変換用画像を示す画像信号が与えられたとき、変換用画像に映っている検知対象物体の複数の特徴量のそれぞれがぼかされてから複数の特徴量が結合された特徴量であって、検知対象物体の3次元位置の推論に用いられる特徴量を示す特徴ベクトルを特徴量抽出部12に出力する。
変換用画像は、学習用画像と画像のドメイン及び認識タスクのうち、1つ以上が異なる画像であればよい。図1に示す推論装置4では、説明の便宜上、変換用画像がTIR画像であるものとして説明する。
学習モデル1aに含まれている複数段の隠れ層のうち、浅い層から出力される低次元特徴量は、例えば、色、輝度、又は、方向を示すものである。このため、低次元特徴量は、入力層に与えられる画像信号が示す画像のドメインに依存する。つまり、RGB画像の画像信号が学習モデル1aの入力層に与えられたときに、学習モデル1aの浅い層から出力される特徴ベクトルが示す特徴量と、TIR画像の画像信号が学習モデル1aの入力層に与えられたときに、学習モデル1aの浅い層から出力される特徴ベクトルが示す特徴量とは、大きく異なることがある。
一方、学習モデル1aの十分に深い中間層から出力される高次元特徴量は、検知対象物体の良否等を表現する概念的な特徴を示すものである。このため、高次元特徴量は、入力層に与えられる画像信号が示す画像のドメインへの依存度が極めて低い概念的な情報となる。また、より深い層の高次元特徴を採用することで、タスクへの依存度の低い汎用的な情報を取得することが可能となる。概念的な物体の特徴は、例えば、“Objectness”、又は、“Informativeness”が知られている。
つまり、RGB画像の画像信号が学習モデル1aの入力層に与えられたときに、学習モデル1aの出力層から出力される特徴ベクトルが示す高次元特徴量と、TIR画像の画像信号が学習モデル1aの入力層に与えられたときに、学習モデル1aの出力層から出力される特徴ベクトルが示す高次元特徴量との差異は小さい。
したがって、学習モデル1aがCNNsによって実現されて、推論装置4が、CNNsの十分に深い中間層から出力される特徴ベクトルが示す高次元特徴量を用いる場合、入力層に与えられる画像信号が示す画像のドメインへの依存性と認識タスクへの依存性とが軽減される。
モデル記憶部2は、第2の学習モデル2aを記憶している。
第2の学習モデル2aは、例えば、回帰型ニューラルネットワークであるRNNs(Recurrent Neural Networks)によって実現される。
第2の学習モデル2aは、自在学習の学習モデルであって、3次元位置を学習して3次元位置の時間的な変化を回帰する学習モデルである。
第2の学習モデル2aは、後述する変化解析部16から、後述する3次元位置推定部15による3次元位置の推定結果が与えられたとき、検検知対象物体の3次元位置の時間的な変化を示す位置データとして、検知対象物体の将来の時刻の3次元位置を示す信号を変化解析部16に出力する。
また、図1に示す推論装置4では、3次元位置推定部15により認識される検知対象物体の3次元位置が、例えば、高次元特徴における物体の存在範囲(Objectness)を含む特徴ベクトルが登録された代表特徴量記憶部14より、検知対象物体の存在範囲(Objectness)を含む代表特徴量を取得し、代表特徴量と特徴抽出部12より抽出された推論時特徴量とを比較して、複数の検知対象物体の代表特徴量の中で、特徴量抽出部12により抽出された推論時特徴量に対応している代表特徴量を特定する。最も類似した代表特徴量を持つクラスが検出対象物体の所属するクラスとなる。さらに、推論時特徴量には、推論時に入力された画像に含まれる検出対象物体の存在範囲(Objectness)を含むため、推論時特徴量の高次元特徴の記述方法をTensor等から二次元空間へ変換することで空間的な物体の存在位置を表すことが可能となる。
第2の学習モデル2aは、3次元位置の推定結果が与えられると、3次元位置を学習して3次元位置の時間的な変化を回帰する。
カメラ3は、検知対象物体を撮影する。
推論装置4が学習時とは異なるドメインの画像を登録する際(以下「ドメイン変換時」という)には、カメラ3は、検知対象物体が映っている変換用画像を示す画像信号として、例えば、検知対象物体が映っているTIR画像を示す画像信号を推論装置4に出力する。
推論装置4が検知対象物体の3次元位置を推定する位置推定時には、カメラ3は、検知対象物体が映っている推論対象画像を示す画像信号として、例えば、検知対象物体が映っているTIR画像を示す画像信号を推論装置4に出力する。
図1では、カメラ3が、変換用画像を示す画像信号を推論装置4に出力している。しかし、これは一例に過ぎず、検知対象物体が映っている変換用画像を示す画像信号を記憶している図示せぬ記憶部から、当該画像信号が推論装置4に出力されるものであってもよい。
ドメイン変換時には、画像信号取得部11は、カメラ3から、検知対象物体が映っている変換用画像を示す画像信号を取得する。
そして、画像信号取得部11は、変換用画像を示す画像信号を特徴量抽出部12に出力する。
位置推定時には、画像信号取得部11は、カメラ3から、検知対象物体が映っている推論対象画像を示す画像信号を取得する。
そして、画像信号取得部11は、推論対象画像を示す画像信号を特徴量抽出部12に出力する。
変換用画像と推論対象画像とは、画像の種類が同じであり、例えば、共にTIR画像である。
ドメイン変換時には、特徴量抽出部12は、画像信号取得部11により取得された画像信号を第1の学習モデル1aに与えて、第1の学習モデル1aから、変換用画像に映っている検知対象物体の複数の特徴量のそれぞれがぼかされてから複数の特徴量が結合された特徴量である代表特徴量を示す特徴ベクトルを取得する。代表特徴量は、検知対象物体の3次元位置の推論に用いられる特徴量である。
特徴量抽出部12は、特徴ベクトルを代表特徴量登録部13に出力する。
位置推定時には、特徴量抽出部12は、画像信号取得部11により取得された画像信号を第1の学習モデル1aに与えて、第1の学習モデル1aから、推論対象画像に映っている検知対象物体の特徴量のそれぞれがぼかされてから複数の特徴量が結合された特徴量である推論時特徴量を示す特徴ベクトルを取得する。推論時特徴量は、検知対象物体の3次元位置の推論に用いられる特徴量である。
特徴量抽出部12は、特徴ベクトルを3次元位置推定部15に出力する。
複数の特徴量のそれぞれをぼかす処理としては、“Pooling Operation”が知られている。
代表特徴量登録部13は、特徴量抽出部12により取得された代表特徴量を登録する。
即ち、代表特徴量登録部13は、いずれかの領域に存在しているドローンの特徴量を示す特徴ベクトルを取得し、特徴ベクトルを代表特徴量記憶部14に記憶させる。
また、代表特徴量登録部13は、いずれかの領域に存在している空飛ぶクルマの特徴量を示す特徴ベクトルを取得し、特徴ベクトルを代表特徴量記憶部14に記憶させる。
また、代表特徴量登録部13は、いずれかの領域に存在しているヘリコプターの特徴量を示す特徴ベクトルを取得し、特徴ベクトルを代表特徴量記憶部14に記憶させる。
代表特徴量記憶部14は、代表特徴量を示す特徴ベクトルを記憶する。
3次元位置推定部15は、特徴量抽出部12から、推論対象画像に映っている検知対象物体の特徴量を示す特徴ベクトルを取得し、代表特徴量記憶部14から、代表特徴量を示す特徴ベクトルを取得する。
3次元位置推定部15は、代表特徴量と推論対象画像に映っている検知対象物体の特徴量とに基づいて、推論対象画像に映っている検知対象物体の3次元位置を推定する。
具体的には、3次元位置推定部15は、代表特徴量と推論時特徴量とに基づいて、推論対象画像に映っている検知対象物体の種類及び存在している領域のそれぞれを認識する。
具体的には、3次元位置推定部15は、高次元特徴における物体の存在範囲(Objectness)及び物体の種類の双方を含む特徴ベクトルが登録された代表特徴量記憶部14より、検知対象物体の存在範囲(Objectness)及び物体の種類の双方を含む代表特徴量を取得し、代表特徴量と特徴抽出部12より抽出された推論時特徴量とを比較して、複数の検知対象物体の代表特徴量の中で、特徴量抽出部12により抽出された推論時特徴量に対応している代表特徴量を特定する。最も類似した代表特徴量を持つクラスが検出対象物体の所属するクラスとなる。さらに推論時特徴量には、推論時に入力された画像に含まれる検出対象物体の存在範囲(Objectness)を含むため、推論時特徴量の高次元特徴の記述方法をTensor等から二次元空間へ変換することで空間的な物体の存在位置を表すことが可能となる。
3次元位置推定部15は、検知対象物体の認識結果を示す表示データを生成し、表示データを表示装置5に出力する。ここで、二次元空間上に矩形として表現した場合は、物体検出(Object Detection)タスクとなり、二次元空間上に領域として表現した場合は、セグメンテーション(Sematic Segmentation)タスクとなる。
変化解析部16は、3次元位置推定部15による3次元位置の推定結果に基づいて、推論対象画像に映っている検知対象物体の3次元位置の時間的な変化を解析する。
具体的には、変化解析部16は、3次元位置推定部15による次元位置の推定結果を第2の学習モデル2aに与えて、第2の学習モデル2aから、検知対象物体の3次元位置の時間的な変化を示す位置データを取得する。
また、変化解析部16は、位置データに基づいて、検知対象物体が落下するか否かを判定する処理のほか、検知対象物体を多クラスに分類する処理として、検知対象物体が、例えば、ホバリングしているのか、上昇しているのか、下降しているのか、前進しているのか、又は、後退しているのかを判定する。
変化解析部16は、検知対象物体の3次元位置の時間的な変化の解析結果を示す表示データを生成し、表示データを表示装置5に出力する。
また、変化解析部16は、上記の判定処理の判定結果を示す表示データを生成し、表示データを表示装置5に出力する。
また、表示装置5は、変化解析部16から出力された表示データに従って、検知対象物体の3次元位置の時間的な変化の解析結果と、判定処理の判定結果とを図示せぬディスプレイに表示させる。
代表特徴量記憶回路24は、例えば、RAM(Random Access Memory)、ROM(Read Only Memory)、フラッシュメモリ、EPROM(Erasable Programmable Read Only Memory)、EEPROM(Electrically Erasable Programmable Read Only Memory)等の不揮発性又は揮発性の半導体メモリ、磁気ディスク、フレキシブルディスク、光ディスク、コンパクトディスク、ミニディスク、あるいは、DVD(Digital Versatile Disc)が該当する。
画像信号取得回路21、特徴量抽出回路22、代表特徴量登録回路23、3次元位置推定回路25及び変化解析回路26のそれぞれは、例えば、単一回路、複合回路、プログラム化したプロセッサ、並列プログラム化したプロセッサ、ASIC(Application Specific Integrated Circuit)、FPGA(Field-Programmable Gate Array)、又は、これらを組み合わせたものが該当する。
ソフトウェア又はファームウェアは、プログラムとして、コンピュータのメモリに格納される。コンピュータは、プログラムを実行するハードウェアを意味し、例えば、CPU(Central Processing Unit)、GPU(Graphical Processing Unit)、中央処理装置、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、プロセッサ、あるいは、DSP(Digital Signal Processor)が該当する。
推論装置4が、ソフトウェア又はファームウェア等によって実現される場合、代表特徴量記憶部14がコンピュータのメモリ31上に構成される。画像信号取得部11、特徴量抽出部12、代表特徴量登録部13、3次元位置推定部15及び変化解析部16におけるそれぞれの処理手順をコンピュータに実行させるためのプログラムがメモリ31に格納される。そして、コンピュータのプロセッサ32がメモリ31に格納されているプログラムを実行する。
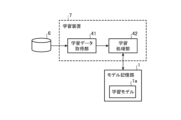
図5は、学習装置7のハードウェアを示すハードウェア構成図である。
学習データ記憶部6は、例えば、ハードディスク、又は、RAMによって実現される。
学習データ記憶部6は、学習データとして、学習用画像を示す画像信号を記憶している。
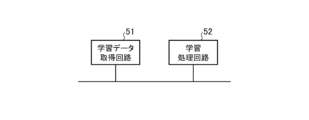
学習データ取得部41は、例えば、図5に示す学習データ取得回路51によって実現される。
学習データ取得部41は、学習データ記憶部6から、学習データを取得する。
学習データ取得部41は、学習データを学習処理部42に出力する。
学習処理部42は、学習データ取得部41から、大量の学習データを取得する。
学習処理部42は、それぞれの学習データを学習モデル1aに与えて、それぞれの学習データに含まれている画像信号が示す学習用画像を学習モデル1aに学習させる。
学習済みの学習モデル1aは、ドメイン変換時、又は、位置推定時において、画像信号が与えられたとき、当該画像信号に対応する特徴ベクトルを出力する。
学習データ取得部41及び学習処理部42のそれぞれは、例えば、単一回路、複合回路、プログラム化したプロセッサ、並列プログラム化したプロセッサ、ASIC、FPGA、又は、これらを組み合わせたものが該当する。
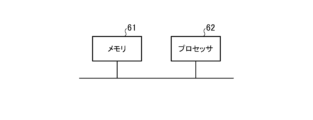
図6は、学習装置7が、ソフトウェア又はファームウェア等によって実現される場合のコンピュータのハードウェア構成図である。
学習装置7が、ソフトウェア又はファームウェア等によって実現される場合、学習データ取得部41及び学習処理部42におけるそれぞれの処理手順をコンピュータに実行させるためのプログラムがメモリ61に格納される。そして、コンピュータのプロセッサ62がメモリ61に格納されているプログラムを実行する。
学習データ記憶部6には、大量の学習データが記憶されており、それぞれの学習データには、学習用画像を示す画像信号が含まれている。
学習データ取得部41は、それぞれの学習データを学習処理部42に出力する。
学習処理部42は、それぞれの学習データを第1の学習モデル1aに与えて、それぞれの学習データに含まれている画像信号が示す学習用画像を学習モデル1aに学習させる。
学習済みの学習モデル1aは、例えば、RGB画像を示す画像信号が入力層に与えられると、出力層から、当該画像信号に対応する特徴ベクトルとして、RGB画像に映っている検知対象物体の高次元特徴量を示す特徴ベクトルを出力する。
学習モデル1aに学習に用いられている学習用画像が、例えば、RGB画像であって、TIR画像が、学習用画像として用いられていない場合、RGB画像に映っている検知対象物体とTIR画像に映っている検知対象物体とが、共に正常な同一物体であったとしても、RGB画像を示す画像信号が入力層に与えられたときに、出力層から出力される特徴ベクトルと、TIR画像を示す画像信号が入力層に与えられたときに、出力層から出力される特徴ベクトルとが相違することがある。
ただし、学習モデル1aを実現するCNNsは、非常にディープなCNNsであり、学習モデル1aの十分に深い中間層から出力される特徴ベクトルは、高次元特徴量を示すものある。このため、上記の相違は僅かなものである。
また、学習モデル1aの出力層から出力される特徴ベクトルが示す特徴量は、上述したように、検知対象物体の、十分に深い中間層の複数の層の複数の特徴量のそれぞれがぼかされてから複数の層の特徴量が結合された特徴量である。このため、特徴ベクトルが示す特徴量は、画像のドメインの依存性及び認識タスクの依存性のそれぞれが排除された頑健な特徴を示すものである。
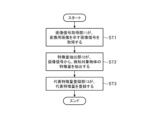
図7は、ドメイン変換時の推論装置4の処理手順を示すフローチャートである。
カメラ3は、検知対象物体を撮影する。カメラ3により撮影される検知対象物体は、ドローン、空飛ぶクルマ、又は、ヘリコプターのいずれかである。ただし、推論装置4は、検知対象物体を、例えば1000に分類することも可能である。このため、検知対象物体を、ドローン、空飛ぶクルマ、又は、ヘリコプターの3つに分類することは、あくまでも、一例である。また、カメラ3により撮影される検知対象物体は、いずれかの領域に存在している。
カメラ3は、いずれかの領域に存在している検知対象物体が映っている変換用画像を示す画像信号として、例えば、検知対象物体が映っているTIR画像を示す画像信号を推論装置4に出力する。
具体的には、画像信号取得部11は、カメラ3から、いずれかの領域に存在しているドローンが映っている変換用画像を示す画像信号を取得し、変換用画像を示す画像信号を特徴量抽出部12に出力する。
また、画像信号取得部11は、カメラ3から、いずれかの領域に存在している空飛ぶクルマが映っている変換用画像を示す画像信号を取得し、変換用画像を示す画像信号を特徴量抽出部12に出力する。
また、画像信号取得部11は、カメラ3から、いずれかの領域に存在しているヘリコプターが映っている変換用画像を示す画像信号を取得し、変換用画像を示す画像信号を特徴量抽出部12に出力する。
特徴量抽出部12は、それぞれの画像信号から、それぞれの変換用画像に映っている検知対象物体の特徴量を抽出する(図7のステップST2)。
具体的には、特徴量抽出部12は、画像信号取得部11から、いずれかの領域に存在しているドローンが映っている変換用画像を示す画像信号を取得する。
特徴量抽出部12は、それぞれの画像信号を第1の学習モデル1aに与えて、第1の学習モデル1aから、いずれかの領域に存在しているドローンの複数の特徴量のそれぞれがぼかされてから複数の特徴量が結合された代表特徴量を示す特徴ベクトルを取得する。
特徴量抽出部12は、特徴ベクトルを代表特徴量登録部13に出力する。
特徴量抽出部12は、それぞれの画像信号を第1の学習モデル1aに与えて、第1の学習モデル1aから、いずれかの領域に存在している空飛ぶクルマの複数の特徴量のそれぞれがぼかされてから複数の特徴量が結合された代表特徴量を示す特徴ベクトルを取得する。
特徴量抽出部12は、特徴ベクトルを代表特徴量登録部13に出力する。
特徴量抽出部12は、それぞれの画像信号を第1の学習モデル1aに与えて、第1の学習モデル1aから、いずれかの領域に存在しているヘリコプターの複数の特徴量のそれぞれがぼかされてから複数の特徴量が結合された代表特徴量を示す特徴ベクトルを取得する。
特徴量抽出部12は、特徴ベクトルを代表特徴量登録部13に出力する。
代表特徴量登録部13は、それぞれの特徴ベクトルを代表特徴量記憶部14に記憶させることで、代表特徴量を登録する(図7のステップST3)。
Tensorは、高次元な情報を表現できるものであるため、代表特徴量登録部13が、Tensorで表現されている特徴ベクトルをそのまま代表特徴量記憶部14に記憶させた場合、3次元位置推定部15が特徴ベクトルを照合する際に、多くの処理時間を要することがある。
3次元位置推定部15が特徴ベクトルを照合する際に要する処理時間を短縮するために、代表特徴量登録部13が、代表特徴量を示す特徴ベクトルを、Tensorよりも次元数が少ないワンホットベクトル(One-hot-vector)に変換し、ワンホットベクトルを代表特徴量記憶部14に記憶させるようにしてもよい。
代表特徴量登録部13によって登録される特徴ベクトルが、Tensor、又は、ワンホットベクトルのいずれであっても、数百次元等の高次元の情報が表現されるものである。このため、種類が同一である複数の検知対象物体の間に多少のばらつきがあったとしても、特徴ベクトルは、当該検知対象物体の代表的な特徴が高次元で記述されたものになっている。
図8は、位置推定時の推論装置4の処理手順である推論方法を示すフローチャートである。
カメラ3は、検知対象物体を撮影する。カメラ3により撮影される検知対象物体は、ドローン、空飛ぶクルマ、又は、ヘリコプターのいずれであるのかが不明である。また、カメラ3により撮影される検知対象物体が存在している領域は、不明である。
カメラ3は、検知対象物体が映っている推論対象画像を示す画像信号として、例えば、検知対象物体が映っているTIR画像を示す画像信号を推論装置4に出力する。
画像信号取得部11は、推論対象画像を示す画像信号を特徴量抽出部12に出力する。
特徴量抽出部12は、画像信号から、推論対象画像に映っている検知対象物体の特徴量を抽出する(図8のステップST12)。
具体的には、特徴量抽出部12は、画像信号を第1の学習モデル1aに与えて、第1の学習モデル1aから、推論対象画像に映っている検知対象物体の高次元特徴量を示す特徴ベクトルを取得する。
特徴量抽出部12は、特徴ベクトルを3次元位置推定部15に出力する。
3次元位置推定部15は、代表特徴量記憶部14から、代表特徴量を示す特徴ベクトルを複数取得する。
3次元位置推定部15は、複数の代表特徴量を示す特徴ベクトルと、特徴量抽出部12から取得した特徴ベクトルとに基づいて、推論対象画像に映っている検知対象物体の3次元位置を推定する(図8のステップST13)。
さらに、推論時特徴量には推論時に入力された画像に含まれる検出対象物体の存在範囲(Objectness)を含むため、推論時特徴量の高次元特徴の記述方法をTensor等から二次元空間へ変換することで空間的な物体の存在位置を表すことが可能となる。これによって、学習時のタスクが画像識別(Image Classification)であった場合、タスクを超えた認識が可能となる。
3次元位置推定部15は、最も類似度の高い代表特徴量が、例えば、空飛ぶクルマの代表特徴量であれば、推論対象画像に映っている検知対象物体の種類が空飛ぶクルマであることを認識し、かつ、検知対象物体の存在している領域を認識する。
3次元位置推定部15は、最も類似度の高い代表特徴量が、例えば、ヘリコプターの代表特徴量であれば、推論対象画像に映っている検知対象物体の種類がヘリコプターであることを認識し、かつ、検知対象物体の存在している領域を認識する。
また、3次元位置推定部15は、3次元位置の推定結果を示す表示データを生成し、表示データを表示装置5に出力する。
なお、3次元位置推定部15は、画像信号取得部11が画像信号を取得する毎に、3次元位置の推定結果を変化解析部16に出力する。画像信号取得部11が画像信号を取得するサンプリング時刻がtnであれば、3次元位置推定部15は、サンプリング時刻tnにおける3次元位置の推定結果を変化解析部16に出力する。
なお、変化解析部16は、ドローンの3次元位置の時間的な変化を示す位置データを取得する必要がある場合、ドローンの3次元位置の推定結果を第2の学習モデル2aに与える。
変化解析部16は、空飛ぶクルマの3次元位置の時間的な変化を示す位置データを取得する必要がある場合、空飛ぶクルマの3次元位置の推定結果を第2の学習モデル2aに与える。
変化解析部16は、ヘリコプターの3次元位置の時間的な変化を示す位置データを取得する必要がある場合、ヘリコプターの3次元位置の推定結果を第2の学習モデル2aに与える。
変化解析部16は、第2の学習モデル2aから、将来のサンプリング時刻における検知対象物体の3次元位置の時間的な変化を示す位置データとして、例えば、将来のサンプリング時刻tn+1~tn+3における検知対象物体の3次元位置の時間的な変化を示す位置データを取得する。
例えば、検知対象物体の将来の位置が、地上の位置を示していれば、変化解析部16は、検知対象物体が落下すると判定する。検知対象物体の将来の位置が、地上の位置を示していなければ、変化解析部16は、検知対象物体が落下しないと判定する。
また、変化解析部16は、位置データに基づいて、検知対象物体を多クラスに分類する処理として、検知対象物体が、例えば、ホバリングしているのか、上昇しているのか、下降しているのか、前進しているのか、又は、後退しているのかを判定する。
また、変化解析部16は、上記の判定処理の判定結果を示す表示データを生成し、表示データを表示装置5に出力する。
また、表示装置5は、図9に示すように、変化解析部16から出力された表示データに従って、検知対象物体の3次元位置の時間的な変化の解析結果と、検知対象物体が落下するか否か等の判定結果とを図示せぬディスプレイに表示させる。
図9は、検知対象物体の3次元位置の時間的な変化を示す説明図である。
図9は、時刻tにおける検知対象物体のx方向の位置と、時刻tにおける検知対象物体のy方向の位置とを示している。
図9において、x方向は、カメラ3の撮影方向と直交する方向であって、例えば、地面と水平な方向である。
y方向は、カメラ3の撮影方向と平行な方向である。z方向は、カメラ3の撮影方向と直交する方向であって、例えば、地面と垂直な方向である。
図9の例では、検知対象物体のz方向の位置が、或る時刻において、地上の位置になっているため、検知対象物体が落下する旨の判定結果を明示している。図9において、検知対象物体が落下する旨の判定結果が“メッセージ”として表示されるようにしてもよい。
第1の学習モデル1aが非常にディープなCNNsによって実現されている場合には、上述したように、第1の学習モデル1aの入力層に与えられる画像信号が示す推論対象画像のドメインが学習用画像と異なっていても、また、検知対象物体が異なっていても、出力層から出力される特徴ベクトルの相違は僅かなものとなる。
これに対して、第1の学習モデル1aが一般的なニューラルネットワーク等によって実現されている場合、第1の学習モデル1aの入力層に与えられる画像信号が示す推論対象画像のドメイン、又は、推論対象画像に映っている検知対象物体が、学習用画像と異なっていれば、出力層から出力される特徴ベクトルの相違が大きくなることがある。
しかしながら、変換用画像のドメインと推論対象画像のドメインとが同じである。このため、第1の学習モデル1aが一般的なニューラルネットワーク等によって実現されている場合でも、推論対象画像に映っている検知対象物体が正常な物体であれば、ドメイン変換時に特徴量抽出部12により取得される代表特徴量と、位置推定時に特徴量抽出部12により取得される推論時特徴量とは、概ね同じような値となる。
一方、推論対象画像に映っている検知対象物体が異常な物体であれば、ドメイン変換時に特徴量抽出部12により取得される代表特徴量と、位置推定時に特徴量抽出部12により取得される推論時特徴量とは、大きく異なる値となる。
したがって、第1の学習モデル1aが一般的なニューラルネットワーク等によって実現されている場合でも、3次元位置推定部15が、高精度に検知対象物体の3次元位置を推定することが可能である。
Claims (6)
- 学習用画像と画像のドメインが異なる場合と、事前学習したタスクと認識タスクの異なる場合とのうち、1つ以上が異なる場合において、検知対象物体が映っている画像である推論対象画像を示す画像信号を取得する画像信号取得部と、
前記画像信号取得部により取得された画像信号を、前記学習用画像の学習が済んでいる第1の学習モデルに与えて、前記第1の学習モデルから、前記推論対象画像に映っている検知対象物体の複数の特徴量のそれぞれがぼかされてから前記複数の特徴量が結合された特徴量であって、前記検知対象物体の3次元位置の推論に用いられる特徴量である推論時特徴量を取得する特徴量抽出部と、
前記推論対象画像と画像のドメイン及び認識タスクのそれぞれが同じ対象である変換用画像に映っている検知対象物体の登録済みの特徴量である代表特徴量と前記特徴量抽出部により取得された推論時特徴量とに基づいて、前記推論対象画像に映っている検知対象物体の3次元位置を推定する3次元位置推定部と、
前記3次元位置推定部による3次元位置の推定結果に基づいて、前記推論対象画像に映っている検知対象物体の3次元位置の時間的な変化を解析する変化解析部と
を備えた推論装置。 - 前記画像信号取得部は、
前記変換用画像を示す画像信号を取得し、
前記特徴量抽出部は、
前記変換用画像を示す画像信号を前記第1の学習モデルに与えて、前記第1の学習モデルから、前記変換用画像に映っている検知対象物体の複数の特徴量のそれぞれがぼかされてから当該複数の特徴量が結合された特徴量であって、前記検知対象物体の3次元位置の推論に用いられる特徴量である代表特徴量を取得し、
前記特徴量抽出部により取得された代表特徴量を登録する代表特徴量登録部を備えたことを特徴とする請求項1記載の推論装置。 - 前記3次元位置推定部は、
種類及び存在している領域のそれぞれが互いに異なる複数の検知対象物体の代表特徴量と前記特徴量抽出部により取得された推論時特徴量とを比較して、前記複数の検知対象物体の代表特徴量の中で、前記特徴量抽出部により取得された推論時特徴量に対応している代表特徴量を特定し、前記代表特徴量の特定結果に基づいて、前記推論対象画像に映っている検知対象物体の認識として、前記検知対象物体の種類及び存在している3次元領域のそれぞれを推定することを特徴とする請求項1記載の推論装置。 - 前記変化解析部は、
3次元位置を学習して3次元位置の時間的な変化を回帰する第2の学習モデルに対して、前記3次元位置推定部による3次元位置の推定結果を与えて、前記第2の学習モデルから、当該検知対象物体の3次元位置の時間的な変化を示す位置データを取得することを特徴とする請求項1記載の推論装置。 - 画像信号取得部が、学習用画像と画像のドメインが異なる場合と、事前学習したタスクと認識タスクの異なる場合とのうち、1つ以上が異なる場合において、検知対象物体が映っている画像である推論対象画像を示す画像信号を取得し、
特徴量抽出部が、前記画像信号取得部により取得された画像信号を、前記学習用画像の学習が済んでいる第1の学習モデルに与えて、前記第1の学習モデルから、前記推論対象画像に映っている検知対象物体の複数の特徴量のそれぞれがぼかされてから前記複数の特徴量が結合された特徴量であって、前記検知対象物体の3次元位置の推論に用いられる特徴量である推論時特徴量を取得し、
3次元位置推定部が、前記推論対象画像と画像のドメイン及び認識タスクのそれぞれが同じ対象である変換用画像に映っている検知対象物体の登録済みの特徴量である代表特徴量と前記特徴量抽出部により取得された推論時特徴量とに基づいて、前記推論対象画像に映っている検知対象物体の3次元位置を推定し、
変化解析部が、前記3次元位置推定部による3次元位置の推定結果に基づいて、前記推論対象画像に映っている検知対象物体の3次元位置の時間的な変化を解析する
推論方法。 - 画像信号取得部が、学習用画像と画像のドメインが異なる場合と、事前学習したタスクと認識タスクの異なる場合とのうち、1つ以上が異なる場合において、検知対象物体が映っている画像である推論対象画像を示す画像信号を取得する画像信号取得手順と、
特徴量抽出部が、前記画像信号取得部により取得された画像信号を、前記学習用画像の学習が済んでいる第1の学習モデルに与えて、前記第1の学習モデルから、前記推論対象画像に映っている検知対象物体の複数の特徴量のそれぞれがぼかされてから前記複数の特徴量が結合された特徴量であって、前記検知対象物体の3次元位置の推論に用いられる特徴量である推論時特徴量を取得する特徴量取得手順と、
3次元位置推定部が、前記推論対象画像と画像のドメイン及び認識タスクのそれぞれが同じ対象である変換用画像に映っている検知対象物体の登録済みの特徴量である代表特徴量と前記特徴量抽出部により取得された推論時特徴量とに基づいて、前記推論対象画像に映っている検知対象物体の3次元位置を推定する3次元位置推定手順と、
変化解析部が、前記3次元位置推定部による3次元位置の推定結果に基づいて、前記推論対象画像に映っている検知対象物体の3次元位置の時間的な変化を解析する変化解析手順とをコンピュータに実行させるための推論プログラム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/029598 WO2023277201A1 (ja) | 2022-08-02 | 2022-08-02 | 推論装置、推論方法及び推論プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2023277201A1 JPWO2023277201A1 (ja) | 2023-01-05 |
| JP7345680B2 true JP7345680B2 (ja) | 2023-09-15 |
Family
ID=84692822
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022562623A Active JP7345680B2 (ja) | 2022-08-02 | 2022-08-02 | 推論装置、推論方法及び推論プログラム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20240046512A1 (ja) |
| JP (1) | JP7345680B2 (ja) |
| KR (1) | KR20240019055A (ja) |
| CN (1) | CN116368535A (ja) |
| CA (1) | CA3193358A1 (ja) |
| WO (1) | WO2023277201A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019185127A (ja) | 2018-04-02 | 2019-10-24 | キヤノン株式会社 | 多層ニューラルネットワークの学習装置およびその制御方法 |
| JP2019212296A (ja) | 2018-05-31 | 2019-12-12 | キヤノンメディカルシステムズ株式会社 | 医用情報処理装置、方法及びプログラム |
| JP2020101948A (ja) | 2018-12-20 | 2020-07-02 | 株式会社日立製作所 | 行動認識システム及び行動認識方法 |
| JP2022037955A (ja) | 2020-08-26 | 2022-03-10 | 株式会社日立製作所 | 学習モデルを選択するシステム |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021110973A (ja) | 2020-01-06 | 2021-08-02 | オムロン株式会社 | 人体検出装置および人体検出方法 |
-
2022
- 2022-08-02 KR KR1020237012153A patent/KR20240019055A/ko unknown
- 2022-08-02 CN CN202280006871.7A patent/CN116368535A/zh active Pending
- 2022-08-02 JP JP2022562623A patent/JP7345680B2/ja active Active
- 2022-08-02 US US18/028,953 patent/US20240046512A1/en active Pending
- 2022-08-02 CA CA3193358A patent/CA3193358A1/en active Pending
- 2022-08-02 WO PCT/JP2022/029598 patent/WO2023277201A1/ja unknown
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019185127A (ja) | 2018-04-02 | 2019-10-24 | キヤノン株式会社 | 多層ニューラルネットワークの学習装置およびその制御方法 |
| JP2019212296A (ja) | 2018-05-31 | 2019-12-12 | キヤノンメディカルシステムズ株式会社 | 医用情報処理装置、方法及びプログラム |
| JP2020101948A (ja) | 2018-12-20 | 2020-07-02 | 株式会社日立製作所 | 行動認識システム及び行動認識方法 |
| JP2022037955A (ja) | 2020-08-26 | 2022-03-10 | 株式会社日立製作所 | 学習モデルを選択するシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN116368535A (zh) | 2023-06-30 |
| JPWO2023277201A1 (ja) | 2023-01-05 |
| CA3193358A1 (en) | 2023-01-05 |
| WO2023277201A1 (ja) | 2023-01-05 |
| US20240046512A1 (en) | 2024-02-08 |
| KR20240019055A (ko) | 2024-02-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11823429B2 (en) | Method, system and device for difference automatic calibration in cross modal target detection | |
| US11734786B2 (en) | Low- and high-fidelity classifiers applied to road-scene images | |
| Blum et al. | Fishyscapes: A benchmark for safe semantic segmentation in autonomous driving | |
| CN108416394B (zh) | 基于卷积神经网络的多目标检测模型构建方法 | |
| CN112287860B (zh) | 物体识别模型的训练方法及装置、物体识别方法及系统 | |
| CN112991413A (zh) | 自监督深度估测方法和系统 | |
| WO2017079522A1 (en) | Subcategory-aware convolutional neural networks for object detection | |
| WO2020046960A1 (en) | System and method for optimizing damage detection results | |
| US11762454B2 (en) | Method and apparatus with image augmentation | |
| JP6397379B2 (ja) | 変化領域検出装置、方法、及びプログラム | |
| US11822621B2 (en) | Systems and methods for training a machine-learning-based monocular depth estimator | |
| CN110033481A (zh) | 用于进行图像处理的方法和设备 | |
| CN112085789B (zh) | 位姿估计方法、装置、设备及介质 | |
| US11392804B2 (en) | Device and method for generating label objects for the surroundings of a vehicle | |
| JP5262705B2 (ja) | 運動推定装置及びプログラム | |
| CN111428539A (zh) | 目标跟踪方法及装置 | |
| CN113095351A (zh) | 借助于初始标记的改善生成经标记的数据的方法 | |
| CN117830356A (zh) | 目标跟踪方法、装置、设备及介质 | |
| US20230260259A1 (en) | Method and device for training a neural network | |
| JP7345680B2 (ja) | 推論装置、推論方法及び推論プログラム | |
| CN115713750A (zh) | 一种车道线检测方法、装置、电子设备及存储介质 | |
| JP2019046278A (ja) | 情報処理装置、制御方法、コンピュータプログラム、記憶媒体、及びモデル作成装置 | |
| JP7128578B2 (ja) | 物体検出装置、物体検出プログラム、物体検出方法、及び学習装置 | |
| US20220012506A1 (en) | System and method of segmenting free space based on electromagnetic waves | |
| WO2023074075A1 (ja) | 推論装置、推論方法及び推論プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221014 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230620 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230725 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230808 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230905 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7345680 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |