JP7309850B2 - 異方性組織の誘導せん断波エラストグラフィのための超音波システム及び方法 - Google Patents
異方性組織の誘導せん断波エラストグラフィのための超音波システム及び方法 Download PDFInfo
- Publication number
- JP7309850B2 JP7309850B2 JP2021503779A JP2021503779A JP7309850B2 JP 7309850 B2 JP7309850 B2 JP 7309850B2 JP 2021503779 A JP2021503779 A JP 2021503779A JP 2021503779 A JP2021503779 A JP 2021503779A JP 7309850 B2 JP7309850 B2 JP 7309850B2
- Authority
- JP
- Japan
- Prior art keywords
- probe
- plane
- tissue
- ultrasound
- imaging
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000002604 ultrasonography Methods 0.000 title claims description 78
- 238000000034 method Methods 0.000 title claims description 62
- 238000002099 shear wave elastography Methods 0.000 title description 31
- 239000000523 sample Substances 0.000 claims description 203
- 238000003384 imaging method Methods 0.000 claims description 137
- 230000000007 visual effect Effects 0.000 claims description 55
- 239000000835 fiber Substances 0.000 claims description 44
- 238000012285 ultrasound imaging Methods 0.000 claims description 37
- 230000009466 transformation Effects 0.000 claims description 16
- 230000004044 response Effects 0.000 claims description 13
- 230000005672 electromagnetic field Effects 0.000 claims description 7
- 210000001685 thyroid gland Anatomy 0.000 claims description 4
- 230000004913 activation Effects 0.000 claims 1
- 210000001519 tissue Anatomy 0.000 description 138
- 238000005259 measurement Methods 0.000 description 20
- 238000012545 processing Methods 0.000 description 17
- 238000010586 diagram Methods 0.000 description 16
- 230000015654 memory Effects 0.000 description 15
- 206010052904 Musculoskeletal stiffness Diseases 0.000 description 13
- 230000006870 function Effects 0.000 description 10
- 210000003205 muscle Anatomy 0.000 description 7
- 210000001087 myotubule Anatomy 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 5
- 238000004458 analytical method Methods 0.000 description 4
- 238000003491 array Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 230000004807 localization Effects 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 238000009877 rendering Methods 0.000 description 3
- 210000003484 anatomy Anatomy 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 238000002059 diagnostic imaging Methods 0.000 description 2
- 238000010191 image analysis Methods 0.000 description 2
- 238000012552 review Methods 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- 210000002027 skeletal muscle Anatomy 0.000 description 2
- 238000000844 transformation Methods 0.000 description 2
- 230000001131 transforming effect Effects 0.000 description 2
- 239000013598 vector Substances 0.000 description 2
- 201000002481 Myositis Diseases 0.000 description 1
- 206010028980 Neoplasm Diseases 0.000 description 1
- 208000027418 Wounds and injury Diseases 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 210000000988 bone and bone Anatomy 0.000 description 1
- 230000003139 buffering effect Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 210000000038 chest Anatomy 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 238000013480 data collection Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000002592 echocardiography Methods 0.000 description 1
- 210000001174 endocardium Anatomy 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 210000003734 kidney Anatomy 0.000 description 1
- 210000004185 liver Anatomy 0.000 description 1
- 210000005228 liver tissue Anatomy 0.000 description 1
- 210000004072 lung Anatomy 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 210000001672 ovary Anatomy 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000012216 screening Methods 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 210000000952 spleen Anatomy 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 210000001550 testis Anatomy 0.000 description 1
- 230000008364 tissue synthesis Effects 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
- 210000004291 uterus Anatomy 0.000 description 1
Images













Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/485—Diagnostic techniques involving measuring strain or elastic properties
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4245—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient
- A61B8/4254—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient using sensors mounted on the probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
- A61B8/463—Displaying means of special interest characterised by displaying multiple images or images and diagnostic data on one display
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8909—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration
- G01S15/8915—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8934—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a dynamic transducer configuration
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8993—Three dimensional imaging systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52023—Details of receivers
- G01S7/52036—Details of receivers using analysis of echo signal for target characterisation
- G01S7/52042—Details of receivers using analysis of echo signal for target characterisation determining elastic properties of the propagation medium or of the reflective target
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52053—Display arrangements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52076—Luminous indicators
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52079—Constructional features
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0883—Detecting organic movements or changes, e.g. tumours, cysts, swellings for diagnosis of the heart
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/467—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient characterised by special input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/483—Diagnostic techniques involving the acquisition of a 3D volume of data
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Surgery (AREA)
- Public Health (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Pathology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Radiology & Medical Imaging (AREA)
- Veterinary Medicine (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Acoustics & Sound (AREA)
- Cardiology (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Description
targetTcurrent=(refTtarget)-1(worldTref)-1worldTcurrent 式1
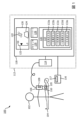
プロセッサは、対象平面の位置に対する現在のイメージング平面の位置をリアルタイムに計算する。本明細書に記載されているように、プロセッサは、現在のイメージング平面の位置と対象平面の位置との間の差を低減するようにイメージング平面の位置を調整するためのフィードバック又は命令を生成する。プロセッサは、変換targetTcurrentに基づいてイメージング平面の位置と対象平面の位置との間の差を計算する。本明細書に記載されているように、ディスプレイ(例えば、図1のディスプレイ120)は、計算される差がリアルタイムに変化するときに、計算される差に基づいてフィードバック(例えば、図1の視覚的指標122)を表示する。


targetTcurrent=targetTmuscle muscleTref(worldTref)-1worldTcurrent 式4
式中、worldTcurrentは、現在の座標系746と世界座標系740との間の変換であり、targetTmuscleは組織座標系743と対象座標系744との間の変換である。式2及び式3の命令と同様に、対象座標系744の要素と現在の座標系746の要素との間の特定の角度又はロケーションの変更などの特定の命令を生成するために、さらなる計算が行われる。
Claims (26)
- せん断波イメージングのための超音波イメージングシステムであって、前記超音波イメージングシステムは、
対象者の異方性組織のせん断波画像を生成するために超音波エコー信号を取得するプローブであって、前記対象者に対する前記プローブの位置を追跡するために位置追跡システムに結合されている、プローブと、
前記プローブと通信し、前記位置追跡システムから位置追跡データを受信するプロセッサとを備え、前記プロセッサは、
前記異方性組織の線維の方向と整列するように基準平面を設定することと、
前記異方性組織の前記基準平面に対して所定の角度にある、前記異方性組織内の少なくとも1つの対象平面を規定することと、
前記位置追跡データによって示される位置にある前記プローブのイメージング平面の第1の位置と、前記少なくとも1つの対象平面の第2の位置との間の差を決定することと、
前記超音波イメージングシステムのディスプレイ上に、前記差の視覚的指標を提供することとをさらに行い、
前記プロセッサは、前記対象平面に対する前記イメージング平面の位置の変化に応答して、前記視覚的指標を動的に更新する、
超音波イメージングシステム。 - 前記プローブは、前記プローブの位置を動的に決定するために前記位置追跡システムから情報を受信する少なくとも1つのセンサを備える、請求項1に記載の超音波イメージングシステム。
- 前記位置追跡システムは、電磁場発生器を備え、前記少なくとも1つのセンサは、前記プローブに取り付けられている少なくとも1つの電磁センサを含む、請求項2に記載の超音波イメージングシステム。
- 前記少なくとも1つの電磁センサは前記プローブに組み込まれている、請求項3に記載の超音波イメージングシステム。
- 前記プロセッサは、さらに、前記第1の位置と前記第2の位置との間の前記差が閾値を下回るときに、少なくとも1つのせん断波画像が自動的に生成されるようにする、請求項1に記載の超音波イメージングシステム。
- 前記プロセッサが、ユーザ入力に応答して前記基準平面の指標を受信する、請求項1に記載の超音波イメージングシステム。
- 前記超音波イメージングシステムは、基準平面選択手段をさらに備え、前記プロセッサが、さらに、前記基準平面選択手段の起動に応答して前記基準平面を前記プローブの現在のイメージング平面に設定する、請求項6に記載の超音波イメージングシステム。
- 前記異方性組織が、筋骨格組織、心内膜組織、血管壁組織、及び甲状腺組織から選択され、前記プロセッサが、前記筋骨格組織、前記心内膜組織、前記血管壁組織、又は前記甲状腺組織の線維の方向を推定する、請求項1に記載の超音波イメージングシステム。
- 前記プロセッサが、さらに、前記異方性組織の3D画像に少なくとも部分的に基づいて前記線維の方向を推定する、請求項8に記載の超音波イメージングシステム。
- 前記プロセッサが、前記基準平面に対する所定の角度間隔において複数の対象平面を規定する、請求項1に記載の超音波イメージングシステム。
- 前記プロセッサは、さらに、前記プローブの位置を調整するための命令を生成し、前記命令は、前記第1の位置と前記第2の位置との間の前記差を低減する、請求項1に記載の超音波イメージングシステム。
- 前記プロセッサは、さらに、前記命令に基づいて前記プローブの位置を自動的に調整するようにアクチュエータを制御する、請求項11に記載の超音波イメージングシステム。
- 前記視覚的指標は、現在の平面の指標及び対象平面指標を含み、前記現在の平面の指標は、前記プロセッサによって、前記対象平面に対する前記プローブの位置の変化に応答して動的に調整される、請求項11に記載の超音波イメージングシステム。
- 前記現在の平面の指標は、前記プローブの現在のイメージング平面の視覚的表現である、請求項13に記載の超音波イメージングシステム。
- 前記対象平面指標は、前記対象平面に対応するイメージング平面の視覚的表現である、請求項13に記載の超音波イメージングシステム。
- 前記視覚的指標は、数値目盛りを含み、前記数値目盛りは、決定されている前記差の変化に応答して前記数値目盛りに沿って動く動的構成要素を持つ、請求項10に記載の超音波イメージングシステム。
- 前記位置追跡システムが、前記プローブの空間的ロケーションと前記基準平面に対する前記プローブの回転とを決定する、請求項1に記載の超音波イメージングシステム。
- せん断波イメージングのための超音波イメージングの方法であって、
対象者の異方性組織のせん断波画像を生成するために超音波エコー信号を取得するプローブに結合されている位置追跡システムから位置追跡データを受信するステップと、
前記異方性組織の線維の方向と整列するように基準平面を設定するステップと、
前記異方性組織の前記基準平面に対して所定の角度にある、前記異方性組織内の少なくとも1つの対象平面を規定するステップと、
前記位置追跡データによって示される位置にある前記プローブのイメージング平面の第1の位置と、前記少なくとも1つの対象平面の第2の位置との間の差を決定するステップと、
超音波システムのディスプレイ上に、前記差の視覚的指標を提供し、前記対象平面に対する前記イメージング平面の位置の変化に応答して、前記視覚的指標を動的に更新するステップと
を含む、方法。 - 前記方法は、前記イメージング平面の前記位置を調整するための命令を生成するステップをさらに含み、前記命令は、決定されている前記差を低減する、請求項18に記載の方法。
- 生成された前記命令に基づいて前記イメージング平面の前記位置を調整するステップをさらに含む、請求項19に記載の方法。
- 前記イメージング平面の前記位置を調整するステップは、前記プローブのロケーションを調整すること、前記プローブの少なくとも1つの角度方向を調整すること、又はこれらの組み合わせを含む、請求項20に記載の方法。
- 前記イメージング平面の前記位置を制御するアクチュエータに、生成された前記命令を送信するステップをさらに含む、請求項19に記載の方法。
- 前記異方性組織の向きと前記イメージング平面の前記位置との間の変換を規定するステップをさらに含む、請求項18に記載の方法。
- 前記異方性組織の向きと整列するように、前記イメージング平面の前記位置を調整するステップをさらに含む、請求項23に記載の方法。
- 前記プローブを用いて前記対象平面の少なくとも1つのせん断波画像を生成するステップをさらに含む、請求項18に記載の方法。
- 決定されている前記位置において生成された前記少なくとも1つのせん断波画像上に前記前記イメージング平面の決定されている前記位置を表示するステップをさらに含む、請求項25に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201862702793P | 2018-07-24 | 2018-07-24 | |
| US62/702,793 | 2018-07-24 | ||
| PCT/EP2019/069618 WO2020020802A1 (en) | 2018-07-24 | 2019-07-22 | Ultrasound system and method for guided shear wave elastography of anisotropic tissue |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2021531122A JP2021531122A (ja) | 2021-11-18 |
| JPWO2020020802A5 JPWO2020020802A5 (ja) | 2022-07-28 |
| JP7309850B2 true JP7309850B2 (ja) | 2023-07-18 |
Family
ID=67480196
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021503779A Active JP7309850B2 (ja) | 2018-07-24 | 2019-07-22 | 異方性組織の誘導せん断波エラストグラフィのための超音波システム及び方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20210290203A1 (ja) |
| EP (1) | EP3826542B1 (ja) |
| JP (1) | JP7309850B2 (ja) |
| CN (1) | CN112752545A (ja) |
| WO (1) | WO2020020802A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115175621A (zh) * | 2019-12-31 | 2022-10-11 | 布弗莱运营公司 | 用于修改超声成像平面位置的方法和装置 |
| IT202100004376A1 (it) * | 2021-02-25 | 2022-08-25 | Esaote Spa | Metodo di determinazione di piani di scansione nell’acquisizione di immagini ecografiche e sistema ecografico per l’attuazione del detto metodo |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008068133A (ja) | 2007-12-03 | 2008-03-27 | Toshiba Corp | 超音波診断装置 |
| WO2013161277A1 (ja) | 2012-04-23 | 2013-10-31 | パナソニック株式会社 | 超音波診断装置およびその制御方法 |
| JP2016523163A (ja) | 2013-06-26 | 2016-08-08 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 超音波剪断波エラストグラフィ測定のマッピングのためのシステムおよび方法 |
| JP2016523167A (ja) | 2013-06-26 | 2016-08-08 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | エラストグラフィ測定システム及びその方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6530885B1 (en) | 2000-03-17 | 2003-03-11 | Atl Ultrasound, Inc. | Spatially compounded three dimensional ultrasonic images |
| US6443896B1 (en) | 2000-08-17 | 2002-09-03 | Koninklijke Philips Electronics N.V. | Method for creating multiplanar ultrasonic images of a three dimensional object |
| US20070249935A1 (en) * | 2006-04-20 | 2007-10-25 | General Electric Company | System and method for automatically obtaining ultrasound image planes based on patient specific information |
| JP5319157B2 (ja) * | 2007-09-04 | 2013-10-16 | 株式会社東芝 | 超音波診断装置、超音波画像処理装置、及び超音波画像処理プログラム |
| US9693755B2 (en) * | 2012-01-19 | 2017-07-04 | Konica Minolta, Inc. | Ultrasound diagnostic device and method for controlling ultrasound diagnostic device |
| KR20160012590A (ko) * | 2014-07-24 | 2016-02-03 | 삼성메디슨 주식회사 | 초음파 영상 장치 및 그 제어방법 |
| US10956701B2 (en) * | 2016-05-27 | 2021-03-23 | Hologic, Inc. | Synchronized surface and internal tumor detection |
| JP6559917B2 (ja) * | 2016-06-07 | 2019-08-14 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 超音波システム並びに乳房組織の撮像及び乳房超音波画像のアノテーション方法 |
-
2019
- 2019-07-22 EP EP19746052.0A patent/EP3826542B1/en active Active
- 2019-07-22 WO PCT/EP2019/069618 patent/WO2020020802A1/en unknown
- 2019-07-22 US US17/262,390 patent/US20210290203A1/en active Pending
- 2019-07-22 CN CN201980062264.0A patent/CN112752545A/zh active Pending
- 2019-07-22 JP JP2021503779A patent/JP7309850B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008068133A (ja) | 2007-12-03 | 2008-03-27 | Toshiba Corp | 超音波診断装置 |
| WO2013161277A1 (ja) | 2012-04-23 | 2013-10-31 | パナソニック株式会社 | 超音波診断装置およびその制御方法 |
| JP2016523163A (ja) | 2013-06-26 | 2016-08-08 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 超音波剪断波エラストグラフィ測定のマッピングのためのシステムおよび方法 |
| JP2016523167A (ja) | 2013-06-26 | 2016-08-08 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | エラストグラフィ測定システム及びその方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3826542A1 (en) | 2021-06-02 |
| EP3826542B1 (en) | 2023-11-29 |
| JP2021531122A (ja) | 2021-11-18 |
| CN112752545A (zh) | 2021-05-04 |
| US20210290203A1 (en) | 2021-09-23 |
| WO2020020802A1 (en) | 2020-01-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7167285B2 (ja) | 超音波システム及び乳房組織撮像のための方法 | |
| US11730447B2 (en) | Haptic feedback for ultrasound image acquisition | |
| JP6559917B2 (ja) | 超音波システム並びに乳房組織の撮像及び乳房超音波画像のアノテーション方法 | |
| EP3003161B1 (en) | Method for 3d acquisition of ultrasound images | |
| US9420996B2 (en) | Methods and systems for display of shear-wave elastography and strain elastography images | |
| JP6517248B2 (ja) | 解剖学的方向に応じた超音波アレイの並進 | |
| EP3463098B1 (en) | Medical ultrasound image processing device | |
| WO2006059668A1 (ja) | 超音波装置、超音波撮像プログラム及び超音波撮像方法 | |
| KR20200071392A (ko) | 초음파 영상 장치, 그 제어 방법, 및 컴퓨터 프로그램 제품 | |
| JP7309850B2 (ja) | 異方性組織の誘導せん断波エラストグラフィのための超音波システム及び方法 | |
| CN112545551A (zh) | 用于医学成像设备的方法和系统 | |
| CN113301855B (zh) | 用于各向异性组织的剪切波表征的超声系统和方法 | |
| JP7261870B2 (ja) | 超音波画像内のツールを追跡するためのシステム及び方法 | |
| US20200405264A1 (en) | Region of interest positioning for longitudinal montioring in quantitative ultrasound | |
| US20190388061A1 (en) | Ultrasound diagnosis apparatus displaying shear wave data for object and method for operating same | |
| JP7033692B6 (ja) | スマート剪断波エラストグラフィのための超音波システムと方法 | |
| KR20180072358A (ko) | 초음파 진단 장치 및 초음파 진단 장치 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220720 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220720 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230427 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230607 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230705 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7309850 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |