JP7287239B2 - 乗員体格判定装置 - Google Patents
乗員体格判定装置 Download PDFInfo
- Publication number
- JP7287239B2 JP7287239B2 JP2019191466A JP2019191466A JP7287239B2 JP 7287239 B2 JP7287239 B2 JP 7287239B2 JP 2019191466 A JP2019191466 A JP 2019191466A JP 2019191466 A JP2019191466 A JP 2019191466A JP 7287239 B2 JP7287239 B2 JP 7287239B2
- Authority
- JP
- Japan
- Prior art keywords
- physique
- occupant
- determination
- shoulder joint
- determination unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/015—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting the presence or position of passengers, passenger seats or child seats, and the related safety parameters therefor, e.g. speed or timing of airbag inflation in relation to occupant position or seat belt use
- B60R21/01512—Passenger detection systems
- B60R21/0153—Passenger detection systems using field detection presence sensors
- B60R21/01538—Passenger detection systems using field detection presence sensors for image processing, e.g. cameras or sensor arrays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/015—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting the presence or position of passengers, passenger seats or child seats, and the related safety parameters therefor, e.g. speed or timing of airbag inflation in relation to occupant position or seat belt use
- B60R21/01512—Passenger detection systems
- B60R21/01552—Passenger detection systems detecting position of specific human body parts, e.g. face, eyes or hands
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/59—Context or environment of the image inside of a vehicle, e.g. relating to seat occupancy, driver state or inner lighting conditions
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/103—Static body considered as a whole, e.g. static pedestrian or occupant recognition
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/043—Identity of occupants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/223—Posture, e.g. hand, foot, or seat position, turned or inclined
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Human Computer Interaction (AREA)
- Automation & Control Theory (AREA)
- Mathematical Physics (AREA)
- Transportation (AREA)
- Image Analysis (AREA)
- Air Bags (AREA)
Description
以下、本発明を具体化した実施形態について図面を参照しつつ説明する。まず、本実施形態に係る車載システム100の構成について説明する。図1に示すように、車載システム100は、車両状態認識装置20、IGスイッチ30、乗員体格判定装置40、エアバックECU50、エアバック装置51を備えている。概要として、乗員体格判定装置40は、車両状態認識装置20からの情報に基づいて、運転席14Aや助手席14Bなどの車室内シート14(図3参照)に着座している乗員の体格を判定し、その判定結果に基づいてエアバック装置51の作動条件を設定する。
(1)乗員判定、
(2)位置情報算出、
(3)面積算出、
の各処理を実施する。画像処理部60は、各処理を実施する乗員判定部61、位置情報算出部62、及び面積算出部63を含んでおり、以下これらを順に説明する。
乗員判定部61は、画像GAに基づいて、車室内に乗員が存在しているか否かを判定する。乗員が存在しているか否かの判定は、例えば記憶部42に記憶された顔認証データに基づく顔認証処理により判定する。記憶部42には、画像処理部60及び状態判定部70の各部で用いられる各種情報が記憶されている。画像GAは、車両動作中に撮像されるため、撮像装置21は、車室内シート14に着座している乗員の画像GAを取得する。そのため、乗員判定部61は、車室内シート14に着座している乗員が存在しているか否かを判定する。
位置情報算出部62は、画像GAにおける乗員の特徴点位置を示す位置情報MAを算出する。位置情報算出部62は、画像GAにおける乗員近傍の領域に限って画像処理を実施する。位置情報算出部62は、この画像処理により画像GAにおける乗員の特徴点位置を特定し、位置情報MAを算出する。
面積算出部63は、画像GAにおいて乗員が占める領域の面積MBを算出する。図5に助手席14Bに着座している乗員について例示するように、面積算出部63は、セマンティックセグメンテーションのような画像認識処理により面積MBを算出する。この場合、図5に点線DLで示すように、乗員にシートベルト15が装着されている場合、図5にそのシートベルト15が装着された領域における乗員の境界位置を特定して面積MBを算出する。
(1)ひねり判定、
(2)第1体格判定、
(3)標準判定
(4)第2体格判定、
の各処理を実施する。状態判定部70は、各処理を実施するひねり判定部71、第1体格判定部72、標準判定部73、及び第2体格判定部74を含んでおり、以下これらを順に説明する。
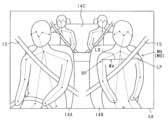
ひねり判定部71は、位置情報MAに含まれる肩関節情報MSに基づいて、乗員がひねり姿勢であるか否かを判定する。ここで、ひねり姿勢とは、車室内シート14に着座している乗員が上体をひねった姿勢であり、具体的には、図6に示すように、右肩関節位置RPと左肩関節位置LPとを結ぶ直線LSの水平方向に対する角度である肩角度θが、所定角度θthよりも大きくなる姿勢である。
第1体格判定部72は、肩関節情報MSに基づいて、乗員の体格を判定する。具体的には、図3に示すように、第1体格判定部72は、右肩関節位置RPと左肩関節位置LPとを結ぶ直線LSの距離である肩幅WAに基づいて、乗員の体格を判定する。なお、本実施形態において、第1体格判定部72が「体格判定部」に相当する。
6YO:120±5cm,23.4±2.3kg
AF05:145±5cm,49±2.3kg
AM50:175±5cm,78±2.3kg。
標準判定部73は、位置情報MAに基づいて、乗員の体格が標準的な体格であるか否かを判定する。記憶部42には、上述した各体格レベルの予め定められた標準的な体格のデータである標準体格データDBが記憶されており、標準判定部73は、この標準体格データDBに基づいて、乗員の体格が標準的な体格であるか否かを判定する。
第2体格判定部74は、標準判定部73により乗員の体格が標準的な体格でないと判定された場合に、面積MBに基づいて、乗員の体格を判定する。上述したように、標準判定部73は、大人の体型レベルであると判定された乗員の体格が標準的な体格であるか否かを判定する。そのため、第2体格判定部74も、大人の体型レベルであると判定された乗員の体格を判定する。
以下、第2実施形態について、第1実施形態との相違点を中心に図9,図10を参照しつつ説明する。本実施形態では、判定処理にエアバック装置51の作動条件を設定する設定処理が含まれる点で、第1実施形態と異なる。
本発明は上記実施形態の記載内容に限定されず、次のように実施されてもよい。
Claims (6)
- 撮像装置(21)により撮像された、車室内シート(14)に着座している乗員の画像(GA)を取得する画像取得部(41)と、
前記画像における前記乗員の肩関節位置を示す肩関節情報(MS)を算出する位置情報算出部(62)と、
前記肩関節情報に基づいて、前記乗員がひねり姿勢であるか否かを判定するひねり判定部(71)と、
前記肩関節情報に基づいて、前記乗員の体格を判定する体格判定部(72)と、を備え、
前記体格判定部は、前記ひねり判定部により前記ひねり姿勢であると判定された場合は、その判定に用いられた前記肩関節情報に基づく前記乗員の体格の判定を無効とする乗員体格判定装置。 - 前記肩関節情報には、右肩関節位置(RP)と左肩関節位置(LP)とが含まれ、
前記ひねり判定部は、前記右肩関節位置と前記左肩関節位置とを結ぶ直線の水平方向に対する角度である肩角度(θ)に基づいて、前記ひねり姿勢を判定する請求項1に記載の乗員体格判定装置。 - 前記体格判定部は、
前記乗員の体格が大人の体格レベルか子供の体格レベルかを判定するものであり、
前記右肩関節位置と前記左肩関節位置とを結ぶ直線の距離である肩幅(WA)が閾値よりも大きい場合には、前記ひねり判定部の判定結果に関わらず、前記乗員の体格が前記大人の体格レベルであると判定とする請求項2に記載の乗員体格判定装置。 - 前記乗員の前記車室内シートからの飛び出しを規制する乗員規制装置(15)を備える車両に適用され、
前記乗員の体格の判定結果に基づいて、前記乗員規制装置の作動条件を初期設定及び更新設定する条件設定部を備え、
前記条件設定部は、前記更新設定において、前記初期設定による前記作動条件に対して、体格を小さくする側への前記作動条件の更新を禁止する請求項1から3までのいずれか一項に記載の乗員体格判定装置。 - 前記体格判定部は、第1体格判定部(72)であり、
前記第1体格判定部は、前記乗員の体格が大人の体格レベルか子供の体格レベルかを判定しており、
前記第1体格判定部により大人の体格レベルと判定された場合に、前記画像において前記乗員が占める領域の面積を算出する面積算出部(63)と、
前記面積に基づいて、大人の体格レベルと判定された前記乗員の体格を判定する第2体格判定部(74)と、を備える請求項1から4までのいずれか一項に記載の乗員体格判定装置。 - 予め定められた標準的な体格のデータである標準体格データ(DB)が記憶された記憶部(42)と、
前記第1体格判定部により前記大人の体格レベルと判定された場合に、前記標準体格データに基づいて、前記乗員の体格が前記標準的な体格であるか否かを判定する標準判定部(73)を備え、
前記面積算出部は、前記標準判定部により前記標準的な体格でないと判定されたことを条件に前記面積を算出する請求項5に記載の乗員体格判定装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019191466A JP7287239B2 (ja) | 2019-10-18 | 2019-10-18 | 乗員体格判定装置 |
| US17/071,881 US11919465B2 (en) | 2019-10-18 | 2020-10-15 | Apparatus for determining build of occupant sitting in seat within vehicle cabin |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019191466A JP7287239B2 (ja) | 2019-10-18 | 2019-10-18 | 乗員体格判定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021066276A JP2021066276A (ja) | 2021-04-30 |
| JP7287239B2 true JP7287239B2 (ja) | 2023-06-06 |
Family
ID=75491772
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019191466A Active JP7287239B2 (ja) | 2019-10-18 | 2019-10-18 | 乗員体格判定装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US11919465B2 (ja) |
| JP (1) | JP7287239B2 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11420579B2 (en) * | 2019-06-21 | 2022-08-23 | GM Global Technology Operations LLC | System and method to automatically set the height of the torso section of a seat belt |
| US11485383B2 (en) * | 2019-12-06 | 2022-11-01 | Robert Bosch Gmbh | System and method for detecting and mitigating an unsafe condition in a vehicle |
| US20220024488A1 (en) * | 2020-07-23 | 2022-01-27 | Autobrains Technologies Ltd | Child Forward Collision Warning |
| JP2022086070A (ja) * | 2020-11-30 | 2022-06-09 | フォルシアクラリオン・エレクトロニクス株式会社 | 情報処理装置、及びプログラム |
| WO2023281737A1 (ja) * | 2021-07-09 | 2023-01-12 | 三菱電機株式会社 | 体格推定装置および体格推定方法 |
| US11951935B2 (en) * | 2021-07-22 | 2024-04-09 | GM Global Technology Operations LLC | System and method for assessing seatbelt routing using seatbelt routing zones that are based on size and shape of occupant |
| WO2023084738A1 (ja) * | 2021-11-12 | 2023-05-19 | 三菱電機株式会社 | 体格判定装置および体格判定方法 |
| WO2023223442A1 (ja) * | 2022-05-18 | 2023-11-23 | 三菱電機株式会社 | 体格判定装置および体格判定方法 |
| WO2024034109A1 (ja) * | 2022-08-12 | 2024-02-15 | 三菱電機株式会社 | 体格判定装置および体格判定方法 |
| WO2024105712A1 (ja) * | 2022-11-14 | 2024-05-23 | 三菱電機株式会社 | 乗員体格検知装置及び乗員体格検知方法 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10334063A1 (de) | 2002-07-31 | 2004-02-26 | Lear Corp., Southfield | Fahrzeug-Rückhaltesystem mit einer dynamischen Klassifikation des Insassen sowie Verfahren zum Verwenden desselben |
| US20040153229A1 (en) | 2002-09-11 | 2004-08-05 | Gokturk Salih Burak | System and method for providing intelligent airbag deployment |
| US6801662B1 (en) | 2000-10-10 | 2004-10-05 | Hrl Laboratories, Llc | Sensor fusion architecture for vision-based occupant detection |
| JP2004338517A (ja) | 2003-05-15 | 2004-12-02 | Toyota Motor Corp | 車両デバイス制御装置 |
| JP2007198929A (ja) | 2006-01-27 | 2007-08-09 | Hitachi Ltd | 車両内状態検知システム,車両内状態検知装置および方法 |
| JP2008002838A (ja) | 2006-06-20 | 2008-01-10 | Takata Corp | 車両乗員検出システム、作動装置制御システム、車両 |
| JP2012127811A (ja) | 2010-12-15 | 2012-07-05 | Honda Motor Co Ltd | 乗員検知装置 |
| JP2018096946A (ja) | 2016-12-16 | 2018-06-21 | アイシン精機株式会社 | 乗員検出装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010203836A (ja) | 2009-03-02 | 2010-09-16 | Mazda Motor Corp | 車室内状態の認識装置 |
| JP2016022145A (ja) | 2014-07-18 | 2016-02-08 | 三菱化学株式会社 | 医療用器具 |
| JP6739672B2 (ja) * | 2018-03-22 | 2020-08-12 | 三菱電機株式会社 | 体格推定装置および体格推定方法 |
-
2019
- 2019-10-18 JP JP2019191466A patent/JP7287239B2/ja active Active
-
2020
- 2020-10-15 US US17/071,881 patent/US11919465B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6801662B1 (en) | 2000-10-10 | 2004-10-05 | Hrl Laboratories, Llc | Sensor fusion architecture for vision-based occupant detection |
| DE10334063A1 (de) | 2002-07-31 | 2004-02-26 | Lear Corp., Southfield | Fahrzeug-Rückhaltesystem mit einer dynamischen Klassifikation des Insassen sowie Verfahren zum Verwenden desselben |
| US20040153229A1 (en) | 2002-09-11 | 2004-08-05 | Gokturk Salih Burak | System and method for providing intelligent airbag deployment |
| JP2004338517A (ja) | 2003-05-15 | 2004-12-02 | Toyota Motor Corp | 車両デバイス制御装置 |
| JP2007198929A (ja) | 2006-01-27 | 2007-08-09 | Hitachi Ltd | 車両内状態検知システム,車両内状態検知装置および方法 |
| JP2008002838A (ja) | 2006-06-20 | 2008-01-10 | Takata Corp | 車両乗員検出システム、作動装置制御システム、車両 |
| JP2012127811A (ja) | 2010-12-15 | 2012-07-05 | Honda Motor Co Ltd | 乗員検知装置 |
| JP2018096946A (ja) | 2016-12-16 | 2018-06-21 | アイシン精機株式会社 | 乗員検出装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20210114541A1 (en) | 2021-04-22 |
| JP2021066276A (ja) | 2021-04-30 |
| US11919465B2 (en) | 2024-03-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7287239B2 (ja) | 乗員体格判定装置 | |
| US11820383B2 (en) | Apparatus detecting driving incapability state of driver | |
| US10909399B2 (en) | Apparatus detecting driving incapability state of driver | |
| US10572746B2 (en) | Apparatus detecting driving incapability state of driver | |
| US10752195B2 (en) | Method and control unit for providing an activation signal for activating at least one occupant protection device for a vehicle, seat belt sensor for a seat belt of a vehicle, and safety system for a vehicle | |
| US7978881B2 (en) | Occupant information detection system | |
| EP3326869B1 (en) | Passenger information detection device and program | |
| JP4898261B2 (ja) | 対象物検出システム、作動装置制御システム、車両、対象物検出方法 | |
| JP7415469B2 (ja) | 体格推定装置および姿勢推定装置 | |
| EP0885782A1 (en) | Apparatus for detecting the presence of an occupant in a motor vehicle | |
| JP2007022401A (ja) | 乗員情報検出システム、乗員拘束装置、車両 | |
| JP4893204B2 (ja) | 車両用ミラー位置調整装置 | |
| US20090034794A1 (en) | Conduct inference apparatus | |
| JP2008002838A (ja) | 車両乗員検出システム、作動装置制御システム、車両 | |
| US20130184939A1 (en) | Collision safety control apparatus and method for vehicle | |
| EP3560770A1 (en) | Occupant information determination apparatus | |
| US20030079929A1 (en) | Apparatus for detecting head of occupant in vehicle | |
| EP3650267B1 (en) | Control device for vehicle, system, method and storage medium | |
| JP2004053324A (ja) | 自動車用衝突安全制御装置 | |
| JP2018156212A (ja) | 体格判定装置、体格判定方法およびプログラム | |
| WO2023021918A1 (ja) | 顔認証システム及び乗員撮像装置 | |
| JP2019074963A (ja) | 所定部位検出装置及び所定部位検出システム | |
| JP2021147001A (ja) | 判定装置 | |
| KR20240011544A (ko) | 시트 벨트 착용 여부 판단 방법 및 장치 | |
| CN117087505A (zh) | 车辆控制方法、装置、设备、介质及产品 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220609 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230308 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230425 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230508 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7287239 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |