JP7285452B2 - Electric assist bicycle control method, electric assist bicycle control device, and electric assist bicycle - Google Patents
Electric assist bicycle control method, electric assist bicycle control device, and electric assist bicycle Download PDFInfo
- Publication number
- JP7285452B2 JP7285452B2 JP2019229825A JP2019229825A JP7285452B2 JP 7285452 B2 JP7285452 B2 JP 7285452B2 JP 2019229825 A JP2019229825 A JP 2019229825A JP 2019229825 A JP2019229825 A JP 2019229825A JP 7285452 B2 JP7285452 B2 JP 7285452B2
- Authority
- JP
- Japan
- Prior art keywords
- assisted bicycle
- power
- state
- determination
- walking
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Description
本発明は、電動アシスト自転車の制御方法、電動アシスト自転車の制御装置、および、電動アシスト自転車に関する。 TECHNICAL FIELD The present invention relates to a method for controlling a power-assisted bicycle, a control device for a power-assisted bicycle, and a power-assisted bicycle.
近年、電動アシスト自転車が押し歩きの状態のときに、アシストを行う電動アシスト自転車の利用が拡大している。特許文献1には、手動のスイッチを通じて、ユーザからの所定の入力があったときに、電動アシスト自転車の状態が押し歩きであると判定して、アシストを行う電動アシスト自転車等が開示されている。
In recent years, there has been an increase in the use of electrically assisted bicycles that provide assistance when the electrically assisted bicycle is in a state of pushing and walking.
しかしながら、特許文献1に開示される電動アシスト自転車は、電動アシスト自転車が押し歩きの状態であるかに関するユーザからの回答の入力なしに、電動アシスト自転車が押し歩きの状態であるか否かを判定することはできない。
However, the power-assisted bicycle disclosed in
本発明は、電動アシスト自転車が押し歩きの状態であるか否かを、ユーザからの回答の入力を必要とせずに、自身で判断できる電動アシスト自転車の制御方法、電動アシスト自転車の制御装置、および、電動アシスト自転車を提供する。 The present invention provides a control method for a power-assisted bicycle, a control device for a power-assisted bicycle, and a control device for a power-assisted bicycle that can determine by itself whether or not the power-assisted bicycle is in a state of pushing and walking without requiring input of an answer from the user. , offering electric assist bicycles.
本発明の一態様に係る電動アシスト自転車の制御方法は、前記電動アシスト自転車におけるペダル踏力またはクランク回転数と、車体速度とを検出する第1検出ステップと、前記ペダル踏力または前記クランク回転数と、前記車体速度とを用いて、前記電動アシスト自転車が、停止、押し歩き、惰性走行および通常走行のうちの少なくとも1つの状態であるかを判定する第1判定ステップと、前記第1判定ステップが行われてから所定時間経過した後に、前記第1判定ステップでの判定結果に基づいて、前記電動アシスト自転車が前記押し歩き、および、前記惰性走行のうちのいずれの状態であるかを判定する第2判定ステップと、前記電動アシスト自転車が前記押し歩きの状態であると前記第2判定ステップで判定した場合に、前記電動アシスト自転車が備えるモータを駆動して、前記押し歩きを支援するための電動アシストを行う電動アシストステップと、を含む。 A control method for a power-assisted bicycle according to an aspect of the present invention includes a first detection step of detecting a pedaling force or crank rotation speed and a vehicle body speed in the power-assisted bicycle, the pedal effort or the crank rotation speed, a first determination step of determining whether the power-assisted bicycle is in at least one state of stopping, pushing, coasting, and normal running using the vehicle body speed; and the first determination step. After a predetermined period of time has passed since the first determination step, a second determination is made as to whether the power-assisted bicycle is in the state of the push-walking state or the coasting state based on the determination result of the first determination step. a determination step; and, when it is determined in the second determination step that the power-assisted bicycle is in the state of pushing and walking, driving a motor provided in the power-assisted bicycle to assist the pushing-walking. and an electrically assisted step for performing
本発明の一態様に係る電動アシスト自転車の制御装置は、前記電動アシスト自転車におけるペダル踏力またはクランク回転数と、車体速度とを取得する取得部と、前記取得部が取得した前記ペダル踏力または前記クランク回転数と、前記車体速度とを用いて、前記電動アシスト自転車が、停止、押し歩き、惰性走行および通常走行のうちのいずれの状態であるかを判定する第1判定部と、前記第1判定部での判定結果に基づいて、前記電動アシスト自転車が前記押し歩き、および、前記惰性走行のうちのいずれの状態であるかを判定する第2判定部と、前記第2判定部で、前記電動アシスト自転車が前記押し歩きの状態であると判定した場合に、前記電動アシスト自転車が備えるモータを駆動して、前記押し歩きを支援するための電動アシストを行う電動アシスト部と、を備える。 A control device for a power-assisted bicycle according to an aspect of the present invention includes an acquisition unit that acquires a pedaling force or crank rotation speed and a vehicle body speed of the power-assisted bicycle; a first determination unit that determines whether the electrically power-assisted bicycle is in a stopped state, a push-walking state, an inertia running state, or a normal running state using the number of revolutions and the vehicle body speed; a second determination unit that determines whether the power-assisted bicycle is in one of the pushing-walking state and the inertia running state based on the determination result of the second determination unit; an electric assist unit that, when it is determined that the assisted bicycle is in the pushing-walking state, drives a motor included in the electric assisted bicycle to perform electric assist for assisting the pushing-walking.
本発明の一態様に係る電動アシスト自転車は、前記電動アシスト自転車におけるペダル踏力またはクランク回転数と、車体速度とを検出する第1検出部と、前記ペダル踏力または前記クランク回転数と、前記車体速度とを用いて、前記電動アシスト自転車が、停止、押し歩き、惰性走行および通常走行のうちのいずれの状態であるかを判定する第1判定部と、前記第1判定部での判定結果に基づいて、前記電動アシスト自転車が前記押し歩き、および、前記惰性走行のうちのいずれの状態であるかを判定する第2判定部と、前記第2判定部で、前記電動アシスト自転車が前記押し歩きの状態であると判定した場合に、前記電動アシスト自転車が備えるモータを駆動して、前記押し歩きを支援するための電動アシストを行う電動アシスト部と、を備える。 A power-assisted bicycle according to an aspect of the present invention comprises: a first detection unit that detects a pedaling force or crank rotation speed and a vehicle body speed in the power-assisted bicycle; and a first determination unit that determines whether the power-assisted bicycle is in a state of stopping, pushing, coasting, or normal running, and based on the determination result of the first determination unit a second determination unit that determines whether the power-assisted bicycle is in the state of pushing and walking or the inertia running; an electric assist unit that drives a motor included in the electric assist bicycle to perform electric assist for assisting the pushing-walking when it is determined that the state is the state.
本発明の一態様に係る電動アシスト自転車の制御方法等は、電動アシスト自転車が押し歩きの状態であるか否かを、ユーザからの回答の入力を必要とせずに、自身で判断することができる。 A method for controlling a power-assisted bicycle according to an aspect of the present invention can determine by itself whether or not the power-assisted bicycle is in a state of pushing, without requiring input of an answer from the user. .
以下、実施の形態について、図面を参照しながら具体的に説明する。なお、以下で説明する実施の形態は、いずれも包括的、または、具体的な例を示すものである。以下の実施の形態で示される数値、形状、材料、構成要素、構成要素の配置位置および接続形態、ステップ、ステップの順序などは、一例であり、本発明を限定する主旨ではない。また、以下の実施の形態における構成要素のうち、独立請求項に記載されていない構成要素については、任意の構成要素として説明される。 Hereinafter, embodiments will be specifically described with reference to the drawings. It should be noted that the embodiments described below are all comprehensive or show specific examples. Numerical values, shapes, materials, components, arrangement positions and connection forms of components, steps, order of steps, and the like shown in the following embodiments are examples and are not intended to limit the present invention. Further, among the constituent elements in the following embodiments, constituent elements not described in independent claims will be described as optional constituent elements.
なお、各図は模式図であり、必ずしも厳密に図示されたものではない。また、各図において、実質的に同一の構成に対しては同一の符号を付し、重複する説明は省略、または、簡略化される場合がある。 Each figure is a schematic diagram and is not necessarily strictly illustrated. Moreover, in each figure, the same code|symbol is attached|subjected with respect to substantially the same structure, and the overlapping description may be abbreviate|omitted or simplified.
[電動アシスト自転車の構成]
まず、実施の形態に係る電動アシスト自転車の構成について、図1を用いて説明する。図1は、本実施の形態に係る電動アシスト自転車1を示す側面図である。
[Configuration of electric assist bicycle]
First, the configuration of a power-assisted bicycle according to an embodiment will be described with reference to FIG. FIG. 1 is a side view showing a power-assisted
本実施の形態に係る電動アシスト自転車1は、第1モードと、第2モードとを有する。第1モードは、例えばアシストモードであり、ペダル17への踏力に基づく車体10の前進が補助される。車体10の前進が補助されることを、アシストされるともいう。第2モードには、例えば押し歩きモードまたは自走モードが含まれる。押し歩きモードでは、電動アシスト自転車1を押して歩くときの車体10を前へ押す力に基づく車体10の前進が補助される。自走モードでは、電動アシスト自転車1を支えながら進むときの車体10の前進が補助される。各モードの詳細については、後で説明する。
The power-assisted
図1に示されるように、電動アシスト自転車1は、車体10と、車体10に取り付けられたモータ駆動ユニット20、操作部40、バッテリー50および前照灯60とを備える。車体10は、フレーム11と、前輪12と、後輪13と、ハンドル14と、サドル15と、クランク16と、ペダル17と、駆動スプロケット18と、チェーン19とを備える。モータ駆動ユニット20は、電動モータ21と、電動モータ21を制御する制御装置22とを備える。また、図1には示していないが、電動アシスト自転車1は、クランク回転センサ31と、モータ回転センサ32と、踏力センサ33とを備える(図3および図4を参照)。
As shown in FIG. 1 , the electrically assisted
フレーム11は、図1に示されるように、ヘッドパイプ111と、メインフレーム112と、立パイプ113と、フォーク114と、チェーンステー115とを備える。ヘッドパイプ111は、前輪12を支持するフォーク114およびハンドル14を、ヘッドパイプ111の軸を中心に回転自在に支持する。ハンドル14を左右に回すことで、フォーク114に支持された前輪12の向きを左右に回転させることができる。
The
メインフレーム112は、ヘッドパイプ111と立パイプ113とを連結する部分である。メインフレーム112の下端部には、クランク16およびモータ駆動ユニット20が取り付けられている。本実施の形態に係る電動アシスト自転車1は、クランク16とモータ駆動ユニット20とが一体化された、いわゆるセンターユニット方式の電動アシスト自転車である。
The
立パイプ113は、サドル15を着脱可能に支持する。具体的には、立パイプ113には、サドル15を支持するシートポストが挿入されて固定される。本実施の形態では、立パイプ113に、バッテリー50が着脱可能に取り付けられている。
The standing
フォーク114は、前輪12を回転自在に支持する。前輪12を支持するフォーク114には、前照灯60が取り付けられている。チェーンステー115は、後輪13を回転自在に支持する。
The
ハンドル14には、図2に示されるように、一対のグリップ141およびブレーキレバー142が左右に設けられている。図2は、本実施の形態に係る電動アシスト自転車1のハンドル14および操作部40の斜視図である。
As shown in FIG. 2, the
一対のグリップ141は、適切な姿勢で乗車された場合に、手で握られる部分である。また、一対のグリップ141は、電動アシスト自転車1を押し歩く際にも手で握られて、前方への押力を受ける。一対のグリップ141の少なくとも一方には、ユーザ2がグリップ141を握る力またはユーザ2がグリップ141を押す押力を検知する圧力センサ45が設けられていてもよい。
A pair of
一対のブレーキレバー142は、前輪12および後輪13の各々に取り付けられたブレーキ装置(図示せず)の動作レバーである。一方のブレーキレバー142を操作することで、前輪12に取り付けられたブレーキ装置(図示せず)が駆動され、前輪12に対して機械的な制動力を与える。他方のブレーキレバー142を操作することで、後輪13に取り付けられたブレーキ装置(図示せず)が駆動され、後輪13に対して機械的な制動力を与える。
A pair of
サドル15は、適切な姿勢で乗車された場合に、人が座る部分である。サドル15には、荷重センサが設けられていてもよい。
The
クランク16は、図1に示されるように、クランク軸161と、一対のクランクアーム162とを有する。クランクアーム162は、メインフレーム112の両側に1つずつ設けられており、左右方向に延びるクランク軸161の両端に固定されている。クランクアーム162の一方端がクランク軸161に固定され、他方端には、ペダル17が回転自在に固定されている。ペダル17に踏力が加えられた場合、クランクアーム162がクランク軸161を中心に回転し、当該回転による人力駆動力が駆動スプロケット18およびチェーン19を介して後輪13に伝達される。アシストモードで動作する場合には、踏力に基づく人力駆動力と、当該人力駆動力に付加された電動モータ21による補助駆動力とが後輪13に伝達される。
The
[モータ駆動ユニットの構造]
次に、モータ駆動ユニットの構造について説明する。図3は、本実施の形態に係る電動アシスト自転車1のモータ駆動ユニット20の構造を示す断面図である。本実施の形態に係るモータ駆動ユニット20は、電動モータ21の出力軸と、人力による出力軸とが同じ一軸式のセンターユニット構造を有する。
[Structure of motor drive unit]
Next, the structure of the motor drive unit will be explained. FIG. 3 is a cross-sectional view showing the structure of the
モータ駆動ユニット20は、図3に示されるように、電動モータ21および制御装置22などが、樹脂製または金属製の筐体28に収納されてユニット化されている。クランク軸161は、筐体28を貫通するように設けられている。なお、クランク軸161は、軸受によって回転可能に支持されている。
As shown in FIG. 3, the
モータ駆動ユニット20は、さらに、クランク軸161の外周に設けられた、筒状の人力伝達体23、中間筒体24および連動体25と、電動モータ21と連動体25との間に配置された減速機構26と、一方向クラッチ27とを備える。
The
人力伝達体23は、クランク軸161に設けられたセレーション部163に嵌め込まれており、クランク軸161と一体的に回転するように設けられている。中間筒体24は、クランク軸161に対しては回転自在に設けられ、かつ、人力伝達体23および連動体25の各々と一体的に回転するように設けられている。連動体25には、駆動スプロケット18が連動体25と一体的に回転するように設けられている。なお、人力伝達体23、中間筒体24および連動体25の各々には、1つ以上のセレーション部が設けられており、互いに嵌まり合うことにより一体的に回転する。なお、セレーション部はスプライン部とも呼ばれる。また、中間筒体24と連動体25との間には、一方向クラッチ27が配置されている。一方向クラッチ27は、中間筒体24上に配置され、ラチェットが連動体25に噛み合うことにより、中間筒体24から連動体25への一方向に回転力を伝達する。
The human
この構成により、ペダル17への踏力によってクランク軸161が回転し、この回転による人力駆動力が人力伝達体23、中間筒体24、一方向クラッチ27および連動体25を介して駆動スプロケット18に伝えられる。人力駆動力によって駆動スプロケット18が回転することで、駆動スプロケット18に取り付けられたチェーン19が回転し、後輪13が回転する。
With this configuration, the
また、連動体25には、減速機構26を介して、電動モータ21による補助駆動力が伝達される。つまり、電動モータ21による補助駆動力によって連動体25の回転を補助することができるので、連動体25の回転に合わせて駆動スプロケット18および後輪13を回転させることができる。
Further, an auxiliary driving force from the
電動モータ21は、制御装置22による制御に基づいて、バッテリー50からの電力を受けて駆動する。電動モータ21は、図3に示されるように、回転軸211と、ロータ部212と、歯部213と、ステータ部214とを有する。電動モータ21は、軸受によって回転軸211およびロータ部212が回転可能に支持されている。バッテリー50からの電力を受けてロータ部212が回転し、ロータ部212の回転に合わせて回転軸211および歯部213が回転する。歯部213は、回転軸211の先端側に設けられており、減速機構26の大径歯車部262に嵌まり合う。歯部213が回転することで、大径歯車部262が回転する。
The
減速機構26は、電動モータ21の回転トルク(すなわち、補助駆動力)が増幅されて連動体25に伝達されるように構成されている。具体的には、図3に示されるように、減速機構26は、回転軸261と、大径歯車部262と、小径歯車部263とを有する。減速機構26の回転軸261および小径歯車部263は、大径歯車部262と一体的に回転する。小径歯車部263は、連動体25の歯車部252に嵌まり合う。小径歯車部263が回転することで、連動体25の歯車部252が回転する。
The
このように、本実施の形態では、電動モータ21が生成する補助駆動力は、減速機構26を介して連動体25に伝達される。すなわち、電動モータ21が回転することで、連動体25も回転し、駆動スプロケット18が回転する。これにより、後輪13を回転させることができる。
As described above, in the present embodiment, the auxiliary driving force generated by the
さらに、図3に示されるように、筐体28の内部には、クランク回転センサ31と、モータ回転センサ32と、踏力センサ33とが設けられている。クランク回転センサ31および踏力センサ33は、クランク軸161の近傍に配置されている。モータ回転センサ32は、電動モータ21の回転軸211の近傍に配置されている。
Further, as shown in FIG. 3 , a
クランク回転センサ31は、歯車状の回転体311と、光検出器312とを有する。回転体311は、中間筒体24と一体的に回転するように設けられている。光検出器312は、互いに対向するように配置された光出射部と受光部とを有する。光検出器312は、回転体311の歯が、光出射部から受光部に至る光の経路を遮る位置に設けられている。回転体311の回転に合わせて歯が光を遮るので、受光部で受光される光が遮られた回数(または、光が受光できた回数)と回転体311の歯の数とに応じて、回転体311の回転数が検出される。回転体311と中間筒体24およびクランク16とが一体的に回転するので、回転体311の回転数は、クランク16の回転数に一致する。このようにして、クランク回転センサ31は、クランク16の回転数を検出することができる。なお、クランク回転センサ31は、クランク16の回転数を検出することができればいかなる構成でもよい。
The
モータ回転センサ32は、電動モータ21の回転軸211と一体的に回転する磁石321と、ホールIC322とを有する。ホールIC322は、磁石321の回転に応じて変化する磁界の変化を検出することで、磁石321の回転数、すなわち、電動モータ21の回転数を検出する。なお、モータ回転センサ32は、電動モータ21の回転数を検出することができればいかなる構成でもよい。
The
踏力センサ33は、磁歪式のトルクセンサであり、人力伝達体23の外周表面に隙間を介して配置されたコイル331と、コイル331と人力伝達体23との間に設けられた磁歪発生部332とを有する。踏力センサ33は、ペダル17への踏力に基づいてクランク軸161が回転することにより発生する人力駆動力を検出する。
The
例えば、ペダル17に踏力が加えられて人力駆動力が発生した場合に、磁歪発生部332に歪みが発生し、磁歪発生部332には、透磁率が増加する部位と減少する部位とが発生する。このため、コイル331のインダクタンス差を検出することで、人力駆動力を検出することが可能である。なお、踏力センサ33の構成は特に限定されず、ペダル17への踏力(または人力駆動力)が検出できればいかなる構成でもよい。
For example, when a pedaling force is applied to the pedal 17 to generate a human-powered driving force, distortion occurs in the
制御装置22は、クランク回転センサ31および踏力センサ33などのセンサによる検出結果に基づいて、電動モータ21の動作を制御する。本実施の形態では、制御装置22は、モータ駆動ユニット20の筐体28の内部に収納されているが、これに限らない。制御装置22は、モータ駆動ユニット20とは別体で設けられていてもよい。
The
[電動アシスト自転車の機能構成]
次に、電動アシスト自転車1の機能構成について説明する。図4は、実施の形態における電動アシスト自転車の構成を示すブロック図である。具体的には、図4は、電動アシスト自転車1の構成のうち、電力を使用する主な構成を示している。
[Functional Configuration of Electric Assist Bicycle]
Next, the functional configuration of the electrically assisted
図4に示されるように、電動アシスト自転車1の制御装置22は、挙動推定部221と、押し歩き制御部222と、取得部223とを有する。また、制御装置22は、制御部220を備えていてもよい。また、制御部220は、制御装置22の外に備えられていてもよい。制御装置22は、例えば、マイコン(マイクロコントローラ)などで実現され、プログラムが格納された不揮発性メモリ、プログラムを実行するための一時的な記憶領域である揮発性メモリ、入出力ポート、プログラムを実行するプロセッサなどで構成されている。あるいは、制御装置22は、専用の電子回路で実現されてもよい。
As shown in FIG. 4 , the
制御装置22には、図4に示されるように、電源スイッチ41、手動スイッチ42、ライトスイッチ43、クランク回転センサ31、モータ回転センサ32、踏力センサ33、が接続されている。電源スイッチ41、手動スイッチ42、ライトスイッチ43、クランク回転センサ31、モータ回転センサ32、および、踏力センサ33は、第1検出部の具体例である。また、制御装置22には、圧力センサ45が接続されていてもよい。なお、第1検出部は、上述の各種センサのうち一部を備えている構成であってもよい。制御装置22には、各スイッチに対する操作信号(具体的には、押下の有無)、および、各センサによる検出結果が入力される。
A
圧力センサ45は、半導体ピエゾ抵抗拡散圧力センサでもよいし、静電容量圧力センサでもよい。
ここで、半導体ピエゾ抵抗拡散圧力センサは、ダイヤフラムの表面に半導体ひずみゲージを形成しており、外部からの力によってダイヤフラムが変形することによって発生するピエゾ抵抗効果による電気抵抗の変化を電気信号に変換するものである。 Here, the semiconductor piezoresistive diffusion pressure sensor forms a semiconductor strain gauge on the surface of the diaphragm, and converts the change in electrical resistance due to the piezoresistive effect that occurs when the diaphragm is deformed by an external force into an electrical signal. It is something to do.
また、静電容量形圧力センサは、ガラスの固定極とシリコンの可動極を対向させ、コンデンサを形成し、外部からの力によって可動極が変形して発生する静電容量の変化を電気信号に変換するものである。 In the capacitive pressure sensor, a fixed electrode made of glass and a movable electrode made of silicon face each other to form a capacitor. It converts.
圧力センサ45は、グリップ141に設置され、ユーザ2がグリップ141を押す際の力を検出する。
The
また、制御装置22には、バッテリー50と、電動モータ21、表示部44および前照灯60とが接続されている。制御装置22は、バッテリー50から供給される電力を、電動モータ21、表示部44および前照灯60に供給する。
Also, the
電動モータ21は、軸を持ち回転する回転子(ロータ)と、回転子と相互作用して回転モーメントを発生させる固定子(ステータ)、回転子の回転を外部に伝える回転軸、回転軸を支える軸受、損失により発生した熱を冷却する冷却装置などから構成される。電動モータ21は、固定子と回転子のいずれかが回転変化する際に発生する磁界の変化によって、駆動力を得る。
The
バッテリー50は、電動モータ21の駆動用の電力を貯める蓄電池である。バッテリー50は、例えば、二次電池であるが、キャパシタなどであってもよい。前照灯60は、リムダイナモ、ハブダイナモまたは電池によって電力を得て、点灯するライトである。
The
挙動推定部221は、電動アシスト自転車1の走行状態を判定する。例えば、挙動推定部221は、電動アシスト自転車1が、停止、押し歩き、惰性走行および通常走行のうちの少なくとも1つの状態であるか否かを判定してもよい。ここで、電動アシスト自転車1が押し歩きの状態であるとは、ユーザ2が電動アシスト自転車1に跨らずに、電動アシスト自転車1のハンドル14を握った状態で、電動アシスト自転車1の横に立って歩く状態を指す。
The
挙動推定部221は、上記の判定を行うために、ペダル踏力またはクランク回転数と、車体速度とに関する情報を用いてもよい。ペダル踏力は、踏力センサ33から、クランク回転数は、クランク回転センサ31から、車体速度は、車速センサが取得したデータから算出される。車速センサは、走行スピードを感知するホイールセンサから成る。
The
挙動推定部221は、2段階に分けて、上記の判定を行ってもよい。第1段階では、挙動推定部221は、ペダル踏力またはクランク回転数と、車体速度とから、電動アシスト自転車1が停止、押し歩き、惰性走行および通常走行のうちの少なくとも一つの状態であるか否かを判定する。
The
次に、第2段階では、挙動推定部221は、第1段階で判定された結果に基づいて、ペダル踏力またはクランク回転数と、車体速度とから、電動アシスト自転車1が押し歩きおよび惰性走行のうちのいずれの状態であるかを判定する。具体的には、第2段階では、挙動推定部221は、第1段階で判定された結果によって第2段階での判定に用いられる判定値を変更する。つまり、挙動推定部221は、電動アシスト自転車1の過去の挙動のフィードバックを受けて、現在の電動アシスト自転車1の挙動を推定する。これにより、第1段階での電動アシスト自転車1の状態を反映した適切な判定値によって、第2段階の判定が行われることが可能である。
Next, in the second stage, the
また、挙動推定部221は、圧力センサ45によって所定以上の圧力が検知された場合に、電動アシスト自転車1が押し歩きの状態であると判定してもよい。挙動推定部221は、第1判定部および第2判定部の具体例である。
The
押し歩き制御部222は、挙動推定部221が、電動アシスト自転車1が押し歩きの状態であると判定した場合に、電動モータ21を駆動して、車体10の前進を補助する。すなわち、押し歩き制御部222は、挙動推定部221が、電動アシスト自転車1が押し歩きの状態であると判定した場合に、電動モータ21を駆動して、アシストを行う。具体的には、押し歩き制御部222は、挙動推定部221によって電動アシスト自転車1が押し歩きの状態であると判定された場合に、PWM(Pulse Width Modulation)指令値を電動モータ21に送信する。このとき、PWM指令値の値は、アシストされた車体10の速度が所定の速度になる値でもよいし、アシストされた車体10の速度が圧力センサ45によって検出される圧力の値が0になる速度になる値でもよい。押し歩き制御部222は、電動アシスト部の具体例である。
The pushing-walking
取得部223は、踏力センサ33、クランク回転センサ31、モータ回転センサ32、または圧力センサ45から、それぞれ、踏力、クランク回転数、モータ回転数、速度、または、圧力のデータを取得する。
電源スイッチ41および手動スイッチ42は、図1および図2に示されるように、ハンドル14に設けられた操作部40に含まれている。
The
[電動アシスト自転車の操作部]
次に、電動アシスト自転車1の備える操作部40について説明する。図5は、電動アシスト自転車1の操作部40の平面図である。操作部40は、図5に示されるように、電源スイッチ41と、手動スイッチ42と、ライトスイッチ43と、表示部44とが設けられている。
[Control section of electric assist bicycle]
Next, the operating
電源スイッチ41は、電源のオンおよびオフを切り替えるスイッチである。具体的には、電源スイッチ41は、バッテリー50から電動モータ21への電力供給の許可および停止を切り替える。
The
例えば、電源がオフされている状態(電源オフ状態)で電源スイッチ41が押下されたとき、バッテリー50から電動モータ21への電力供給が可能になる(電源オン状態)。このため、制御部220は、アシストモード、および、押し歩きモードまたは自走モードを実行可能になる。また、電源オン状態で電源スイッチ41が押下されたとき、バッテリー50から電動モータ21への電力供給が停止される。このため、制御部220は、アシストモード、押し歩きモードおよび自走モードのいずれも実行不可能になる。
For example, when the
手動スイッチ42は、押し歩きモードまたは自走モードを開始する指示を受け付ける入力部の一例である。本実施の形態では、制御部220は、手動スイッチ42が押下されている期間のみ、押し歩きモードまたは自走モードを実行する。つまり、手動スイッチ42を押し続けながら車体10を押してまたは支えて歩くことで、押し歩きモードまたは自走モードが実行される。これにより、電動モータ21による第2補助駆動力が発生し、押し歩きまたは自走を補助することができる。手動スイッチ42の押下を止めた場合、電動モータ21の駆動が停止され、第2補助駆動力も発生しなくなる。
The
なお、手動スイッチ42を1回押下した場合に、その後、手動スイッチ42を押し続けなくても、押し歩きモードまたは自走モードが実行されてもよい。押し歩きモードまたは自走モードの実行中に、再び手動スイッチ42を押下した場合に、押し歩きモードまたは自走モードが停止されてもよい。この場合、押し歩きの際に、手動スイッチ42を押し続けなくてよいので、車体10を押すことに専念することができる。つまり、押し歩きの際にバランスを崩しにくくなり、転倒などの危険性を低下させることができる。
Note that, when the
また、手動スイッチ42には、押し歩きモードを実行するための押し歩きスイッチと、自走モードを実行するための自走スイッチとの2つの異なるスイッチが含まれてもよい。制御部220は、押し歩きスイッチが押下されたとき、押し歩きモードを実行し、自走スイッチが押下されたとき、自走モードを実行してもよい。
The
ライトスイッチ43は、前照灯60の点灯および消灯を切り替えるスイッチである。表示部44は、バッテリー50の残量を表示する。
The
電源スイッチ41、手動スイッチ42およびライトスイッチ43はそれぞれ、物理的に押下可能な機械式のスイッチであるが、これに限らない。操作部40は、例えば、タッチパネルディスプレイなどであってもよい。電源スイッチ41、手動スイッチ42およびライトスイッチ43の少なくとも1つは、ディスプレイに表示されるGUI(Graphical User Interface)などで実現されてもよい。
The
表示部44は、例えば、バッテリー残量、走行状態、速度、および、走行位置等を示す表示パネルである。表示パネルは、液晶ディスプレイでもよいし、有機ELディスプレイでもよい。また、表示部44は、操作部40であるサイクルコンピュータのディスプレイでもよいし、スマートフォンのディスプレイでもよい。
The
また、操作部40には、他に、アシストモード、押し歩きモードおよび自走モードの動作の強弱を切り替えるモードスイッチなどが設けられていてもよい。また、操作部40の各スイッチおよび表示部44のレイアウトは、図5に示した例には限定されない。例えば、ライトスイッチ43および表示部44は設けられていなくてもよい。
In addition, the
図5で説明されたように、従来の電動アシスト自転車1では、手動スイッチ42へのユーザ2の入力に基づいて、押し歩きモードまたは自走モードが実行されていた。本開示の実施の形態における電動アシスト自転車1では、電動アシスト自転車1が備える挙動推定部221が、電動アシスト自転車1が押し歩きの状態であるか否かを判定することができる。
As explained in FIG. 5 , the conventional power-assisted
[制御装置の搭載位置]
次に、挙動推定部221の搭載位置について説明する。図6は、実施の形態における電動アシスト自転車の制御方法を実行する制御装置を搭載する機器の例を示す図である。例えば、図6の(a)に示されるように、挙動推定部221、押し歩き制御部222および取得部223は、制御装置として、モータ駆動ユニット20に搭載されている。具体的には、挙動推定部221、押し歩き制御部222および取得部223は、制御装置として、モータ駆動ユニット20に搭載されているマイコンに搭載されていてもよい。
[Installation position of control device]
Next, the mounting position of the
取得部223は、電動アシスト自転車1に取り付けられた各種センサからデータを取得し、当該データを挙動推定部221に送信する。各種センサは、具体的には、踏力センサ33、クランク回転センサ31、および、モータ回転センサ32である。各種センサは、上記センサのうちの1つまたは複数で構成される一部であってもよい。
The
挙動推定部221は、当該データを用いて、電動アシスト自転車1が、押し歩きの状態であるか否かを判定する。また、挙動推定部221は、当該データを用いて、電動アシスト自転車1が、停止、押し歩き、通常走行または惰性走行のうちのいずれの状態であるかを判定してもよい。
The
そして、押し歩き制御部222は、挙動推定部221が出力した判定結果に基づいて、電動モータ21を駆動するための信号を送出する。押し歩き制御部222は、挙動推定部221が、電動アシスト自転車1が押し歩きの状態であると判定したときに、電動モータ21を駆動するための信号を送出してもよい。このとき、押し歩き制御部222は、電動アシスト自転車1が一定の速度で走行するように、電動モータ21を駆動するための信号を送出してもよい。なお、電動アシスト自転車1が一定の速度で走行するとは、必ずしも、電動アシスト自転車1が自走することに限らない。また、一定の速度は、ユーザ2が設定することが可能であってもよい。
Then, the push-walking
次に、図6の(b)に示されるように、挙動推定部221、押し歩き制御部222および取得部223は、モータ駆動ユニット20に搭載されるのではなく、手元スイッチまたはサイクルコンピュータ等で実現される操作部40に、制御装置として、搭載されてもよい。具体的には、挙動推定部221、押し歩き制御部222および取得部223は、制御装置として、操作部40に搭載されているCPUまたは専用の回路等に搭載されていてもよい。
Next, as shown in (b) of FIG. 6, the
操作部40は、モータ駆動ユニット20とデータ通信を行う。操作部40に搭載された取得部223が取得したデータを用いて、操作部40に搭載された挙動推定部221が電動アシスト自転車1の状態の判定を行い、挙動推定部221が判定した結果に基づいて、操作部40に搭載された押し歩き制御部222が電動モータ21を駆動するための信号を送出する。そして、操作部40は、押し歩き制御部222が送出した信号を、モータ駆動ユニット20に送信する。モータ駆動ユニット20は、押し歩き制御部222が送出した信号に基づいて、電動モータ21を駆動する。
The
ここで、手元スイッチは、電動アシスト自転車1と一体となった器具であり、ユーザ2が通常走行時のアシスト量等の調整を行う際に使用される。また、手元スイッチは、バッテリー50の残量等も表示できる。
Here, the hand switch is a device integrated with the power-assisted
対して、サイクルコンピュータは、電動アシスト自転車1と別体であり、ユーザ2が、電動アシスト自転車1の購入後に、電動アシスト自転車1に装着できる器具である。サイクルコンピュータは、GPS等を搭載しており、現在位置、または、走行中の電動アシスト自転車の速度等を表示できる。
On the other hand, the cycle computer is separate from the power-assisted
なお、図6の(b)では、操作部40は、手元スイッチまたはサイクルコンピュータで実現されると説明されたが、操作部40は、スマートフォンのアプリケーション等で実現されてもよい。
In addition, in (b) of FIG. 6, it was explained that the
また、圧力センサ45が所定の閾値以上の圧力を検知した場合、挙動推定部221は、電動アシスト自転車1が押し歩きの状態であると判定する。
Further, when the
[電動アシスト自転車の走行状態の判定処理]
次に、電動アシスト自転車の走行状態の判定処理について説明する。図7は、実施の形態における挙動推定部への入力値と判定結果の例を示す図である。挙動推定部221への入力値として、踏力センサ33から出力された踏力に関するデータ、もしくは、クランク回転センサから出力されたクランク回転数に関するデータ、および、クランク回転数から算出された車体10の速度に関するデータが用いられる。上記のデータの入力を受けて、挙動推定部221は、電動アシスト自転車1の状態について判定する。例えば、判定結果の出力値は、停止が0、押し歩きが1、惰性走行が2、通常走行が3でもよい。そして、出力値が3の惰性走行と判定された場合、電動アシスト自転車1は、通常のアシスト制御を行う。出力値が1の押し歩きと判定された場合は、電動アシスト自転車1は、押し歩きアシスト制御を行う。出力値が0の停止と判定された場合、電動アシスト自転車1は、いずれのアシストも行わない。また、出力値が2の惰性走行と判定された場合も、電動アシスト自転車は、いずれのアシストも行わない。
[Processing for Determining Running State of Electric Assist Bicycle]
Next, the processing for determining the running state of the electrically power-assisted bicycle will be described. 7A and 7B are diagrams illustrating examples of input values to a behavior estimation unit and determination results in the embodiment. As input values to the
挙動推定部221は、判定結果を自身にフィードバックして、次の判定に利用する。例えば、挙動推定部221は出力した判定結果に基づいて、電動アシスト自転車1の状態について判定する時に用いる判定値(または閾値)を、その都度、変更してもよい。
The
また、挙動推定部221への入力値として、圧力センサ45から出力されたグリップ141にかかる圧力に関するデータが用いられてもよい。グリップ141にかかる圧力に関するデータの入力を受けて、挙動推定部221は、電動アシスト自転車1の状態について判定する。例えば、グリップ141にかかる圧力が所定の閾値以上であれば、電動アシスト自転車1の状態が押し歩きであると判定し、出力値として1を出力してもよい。ここで、出力値は、上述のように挙動推定部221にフィードバックされ、次の判定に利用されてもよい。例えば、挙動推定部221は出力した判定結果に基づいて、電動アシスト自転車1の状態について判定する時に用いる判定値(または閾値)を、その都度、変更してもよい。
As an input value to the
図8は、実施の形態における挙動推定部が行う判定処理を示すフローチャートである。 FIG. 8 is a flowchart illustrating determination processing performed by a behavior estimation unit according to the embodiment.
まず、挙動推定部221は、ペダル踏力またはクランク回転数が既定値以上か否かを判定する(ステップS100)。ここで、当該既定値は、ユーザ2が手動で設定することができてもよい。そのとき、ユーザ2は、当該既定値を値そのもので設定するのではなく、予め定められたいくつかの値から、所望の値を選択して、設定を行ってもよい。例えば、ユーザ2が、値が実現する状態を表現した言葉を選択することによって、当該言葉と紐づけられた値を間接的に設定することとしてもよい。
First, the
挙動推定部221が、ペダル踏力またはクランク回転数が既定値以上であると判定した場合(ステップS100でYes)、挙動推定部221は、電動アシスト自転車1が通常走行の状態であると判定する(ステップS104)。
When the
挙動推定部221が、ペダル踏力またはクランク回転数が既定値以上でないと判定した場合(ステップS100でNo)、挙動推定部221は、車体10のスピードが0km/hより速いか否かを判定する(ステップS101)。ここで、判定される車体10のスピードは約0km/hでもよい。例えば、判定される車体10のスピードは、数km/hでもよい。
When the
挙動推定部221が、車体10のスピードが0km/hより遅いと判定した場合(ステップS101でNo)、挙動推定部221は、電動アシスト自転車1が停止の状態であると判定する(ステップS107)。
When the
挙動推定部221が、車体10のスピードが0km/hより速いと判定した場合(ステップS101でYes)、挙動推定部221は、直前に自身が行った判定の結果に基づいて、電動アシスト自転車1の状態を判定するために用いる判定値(すなわち閾値)の設定を行う(ステップS102)。直前に自身が行った判定の結果に基づく判定値の設定の詳細は、後述する。
When the
次に、挙動推定部221は、車体10のスピードが判定値以上か否かを判定する(ステップS103)。ここで用いられる判定値は、ステップS102で設定された判定値である。
Next, the
挙動推定部221が、車体10のスピードが判定値以上であると判定した場合(ステップS103でYes)、挙動推定部221は、電動アシスト自転車1が惰性の状態であると判定する(ステップS105)。
When the
挙動推定部221が、車体10のスピードが判定値以上でないと判定した場合(ステップS103でNo)、挙動推定部221は、電動アシスト自転車1が押し歩きの状態であると判定する(ステップS106)。
When the
そして、電動アシスト自転車1は、挙動推定部221の判定結果に基づいて、所定の場合に、アシストを行う。所定の場合とは、挙動推定部221が、電動アシスト自転車1が押し歩きの状態であると判定した場合でもよい。
Based on the determination result of the
または、挙動推定部221は、(A)電動アシスト自転車1が停止の状態、(B)電動アシスト自転車が押し歩きの状態、(C)電動アシスト自転車1が惰性走行の状態、および、(D)電動アシスト自転車が通常走行の状態、のうち少なくともひとつの状態であると判定する。
Alternatively, the
なお、挙動推定部221は、手元スイッチ等の操作部40から、挙動推定部221の判定が正解だったか否かについての回答を受け付けてもよい。当該解答はユーザ2によって手動でなされることが想定されるが、それに限らない。
Note that the
また、ステップS100からステップS107で説明された処理が1回目に行われるときには、ステップS102の処理は行われない。1回目に行われるステップS100からステップS107で説明された処理において、ステップS103の判定には、既定の判定値が使用されてもよい。 Also, when the processes described in steps S100 to S107 are performed for the first time, the process of step S102 is not performed. In the process described in steps S100 to S107 performed for the first time, a predetermined determination value may be used for the determination in step S103.
また、ステップS100からステップS107で説明された処理は、繰り返し行われる。2回目以降の処理では、ステップS104からステップS107での判定結果を、ステップS102で行われる判定値の設定に反映させる。 Further, the processing described in steps S100 to S107 is repeatedly performed. In the second and subsequent processes, the determination results from steps S104 to S107 are reflected in the determination value setting performed at step S102.
また、挙動推定部221は、ステップS106で押し歩きの状態であると判定したあとに、ステップS103を行う構成としてもよい。このとき、ステップS104で通常走行の状態と、ステップS105で惰性走行の状態と判定された場合は、ステップS103で、常にステップS105の惰性走行の状態と判定してもよい。加えて、ステップS107で停止の状態と判定されたときは、ステップS103で、常にステップS106の押し歩きの状態であると判定してもよい。
Further, the
図9は、実施の形態における挙動推定部が行う判定に用いられる判定値の例を示す図である。 FIG. 9 is a diagram illustrating an example of determination values used for determination performed by the behavior estimation unit in the embodiment.
判定値は、挙動推定部221による直前の判定結果が通常走行または惰性走行であるときと、挙動推定部221による直前の判定結果が押し歩きであるときと、挙動推定部221による直前の判定結果が停止であるときとで、異なってもよい。例えば、判定値は、挙動推定部221による直前の判定結果が通常走行または惰性走行であるときに最も小さく、挙動推定部221による直前の判定結果が停止であるときが最も大きくてもよい。挙動推定部221による直前の判定結果が押し歩きであるときの判定値が、挙動推定部221による直前の判定結果が通常走行または惰性走行であるときの判定値よりも大きく、挙動推定部221による直前の判定結果が停止であるときの判定値よりも小さくてもよい。なお、判定値は、判定基準の具体例である。
The determination value is set when the previous determination result by the
具体的には、挙動推定部221による直前の判定結果が通常走行または惰性走行であるときの判定値は、0~1km/hでもよい。また、挙動推定部221による直前の判定結果が押し歩きであるときの判定値は、10km/hでもよい。また、挙動推定部221による直前の判定結果が停止であるときの判定値は、24km/hでもよい。ここで示された数値は、必ずしもこれに限るものではなく、正の値であれば、2~3km/h異なってもよい。
Specifically, the determination value may be 0 to 1 km/h when the immediately preceding determination result by
なお、判定値は、挙動推定部221による直前の判定結果に対応した固定の値でなくてもよい。判定値は、挙動推定部221による直前の判定結果に対応して、制御が行われる毎に、毎回、学習制御で決定されてもよい。ここで、学習制御とは、ユーザ2の特性を反映させるアルゴリズムを含んでもよい。また、判定値は、多数のユーザ2から取得した車体10の速度、走行位置または走行状態等のデータから構成されるビッグデータを用いる、機械学習、特に機械学習のうちの深層学習モデルのアルゴリズムが用いられて決定されてもよい。これにより、挙動推定部221は、ユーザ2の乗車特性の傾向を反映した判定値を用いることができる。
Note that the determination value does not have to be a fixed value corresponding to the previous determination result by the
なお、判定値の決定には、手元スイッチ等の操作部40から、挙動推定部221の判定が正解だったか否かについての回答を反映させてもよい。
In determining the judgment value, an answer as to whether or not the judgment of the
[押し歩き制御部の制御]
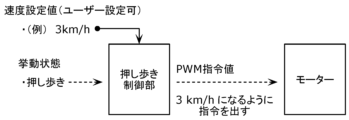
次に、押し歩き制御部222の行う制御について、説明する。図10は、実施の形態における押し歩き制御部222への入力と出力との例を示す図である。
[Control of push-walking controller]
Next, the control performed by the push-walking
まず、挙動推定部221から出力された、電動アシスト自転車1の走行状態を示す判定結果が、押し歩きである場合に、その旨を示す情報が押し歩き制御部222に入力される。ここで、押し歩き制御部222には、挙動推定部221が電動アシスト自転車1の走行状態を押し歩きの状態であると判定したときだけ、挙動推定部221の判定結果が入力されるとしたが、これに限らない。押し歩き制御部222には、挙動推定部221が判定した結果が常に入力され、押し歩き制御部222が、当該判定結果が押し歩きであるか否かを判定してもよい。
First, when the determination result indicating the running state of the electrically power-assisted
次に、ユーザ2等が押し歩き制御が実現する車体10の速度を設定する。例えば、設定される車体10の速度は、3km/hでもよい。車体10の速度の設定は、ユーザが操作部40を通して、手動で行ってもよいし、サイクルコンピュータまたはスマートフォンアプリケーション等が自動で行ってもよい。また、車体10の速度は、押し歩き制御部222にあらかじめ設定されている速度が用いられてもよい。
Next, the
なお、ここで、説明された押し歩き制御部222に挙動推定部221が判定した結果が入力される処理と、押し歩き制御が実現する車体10の速度の設定の処理は、この順で行われなくてもよく、説明された順序と逆の順序で行われてもよい。
Here, the process of inputting the result determined by the
そして、押し歩き制御部222は、電動モータ21に、PWM(Pulse Width Modulation)指令値を送信する。ここで、PWM指令値は、設定された速度を実現するように電動モータ21を駆動することができる、デューティ比または周波数を変更させる信号である。例えば、速度設定値が3km/hである場合、車体10の速度が3km/hとなるように、電動モータ21を駆動するようなPWM指令値が、押し歩き制御部222から電動モータ21に送信される。
Then, the push-walking
図11は、実施の形態における押し歩き制御部222への入力と出力との別の例を示す図である。図11では、電動アシスト自転車1が圧力センサ45を備えている場合の押し歩き制御部への入力と出力の例が説明される。図10で説明されたように、まず、挙動推定部221から出力された、電動アシスト自転車1の走行状態を示す判定結果が、押し歩きである場合に、その旨を示す情報が押し歩き制御部222に入力される。挙動推定部221からの押し歩き制御部222への入力については、図10で説明された内容と同様である。
FIG. 11 is a diagram showing another example of inputs and outputs to the push-walking
次に、圧力センサ45から、検出された圧力のデータが押し歩き制御部222に入力される。
Next, data on the detected pressure is input from the
なお、ここで、説明された押し歩き制御部222に挙動推定部221が判定した結果が入力される処理と、検出された圧力のデータが押し歩き制御部222に入力される処理は、この順で行われなくてもよく、説明された順序と逆の順序で行われてもよい。
Here, the process of inputting the result determined by the
そして、押し歩き制御部222は、電動モータ21に、PWM指令値を送信する。例えば、押し歩き制御部222に入力された、圧力センサで検知された圧力の値が0になるような、車体10の速度を実現するPWM指令値を送信する。つまり、押し歩き制御部222は、電動モータ21に、グリップ141に係る圧力によって実現される車体10の速度と同等の速度を実現するPWM指令値を送信する。なお、圧力は、グリップ141のユーザ2に対して前面に係る圧力だけでなく、グリップ141のユーザ2に対して後面に係る圧力でもよい。グリップ141のユーザ2に対して後面に係る圧力が検出されたときも、同様に、押し歩き制御部222は、電動モータ21に、グリップ141に係る圧力によって実現される車体10の速度と同等の速度を実現するPWM指令値を送信する。
Then, the push-walking
また、ここで、押し歩き制御部222に入力された、圧力センサで検知された圧力の値が0になるような、車体10の速度を実現するPWM指令値を送信すると説明されたが、圧力センサで検知された圧力の値が所定の値より小さくなるような、車体10の速度を実現するPWM指令値を送信されてもよい。また、圧力センサで検知された圧力の値が検知された圧力よりも小さくなるような、車体10の速度を実現するPWM指令値を送信されてもよい。
Further, here, it was explained that the PWM command value that realizes the speed of the
[電動アシスト自転車の走行状態の可視化]
図12は、実施の形態における電動アシスト自転車の制御方法によって判定された結果を可視化した例を示す図である。
[Visualization of the running state of an electrically assisted bicycle]
FIG. 12 is a diagram showing an example of visualizing the results determined by the control method for the power-assisted bicycle according to the embodiment.
挙動推定部221は、車体10の走行位置に関するデータを用いて、電動アシスト自転車1の移動履歴を割り出し、当該移動履歴を地図データ上に重ね合わせることで、電動アシスト自転車1の移動履歴の可視化を行ってもよい。電動アシスト自転車1の移動履歴は、電動アシスト自転車1に設置されたGPS(Global Positioning System)から送信される位置情報を、地図データ上に可視化することによって行われてもよい。
The
また、電動アシスト自転車1の移動履歴は、電動アシスト自転車1に備えられたクランク回転センサ、ジャイロセンサ、および、加速度センサから出力されるデータに基づいて、挙動推定部221が移動距離および移動方向を割り出し、所定の基準点からの移動履歴を割り出してもよい。所定の基準点の設定にはGPSで計測された地点が用いられてもよいし、ユーザ2による手動で設定された地図上の地点が用いられてもよい。
The movement history of the electrically power-assisted
当該移動履歴の地図データ上への重ね合わせは、既存の地図アプリケーションのAPI(Application Programming Interface)を利用して行われてもよい。既存の地図アプリケーションはインターネット上でオンラインで提供されているものを利用してもよく、記録媒体に記録されたソフトウェアとして提供されているものを利用してもよい。 The movement history may be superimposed on the map data using an API (Application Programming Interface) of an existing map application. An existing map application that is provided online on the Internet may be used, or one that is provided as software recorded on a recording medium may be used.
また、移動履歴の可視化においては、移動履歴の線種または色を変更することによって、電動アシスト自転車1の走行状態のそれぞれを表してもよい。ここで、電動アシスト自転車1の走行状態とは、例えば、停止、通常走行、押し歩きまたは惰性走行である。電動アシスト自転車1の可視化においては、電動アシスト自転車1の走行状態として、急ブレーキの状態が表示されてもよい。急ブレーキの状態は、電動アシスト自転車1の加速度の変化から判定されてもよい。
Further, in the visualization of the travel history, each running state of the electrically power-assisted
図12において、電動アシスト自転車1の移動履歴の可視化は、挙動推定部221が行うとして説明されたが、電動アシスト自転車1の移動履歴の可視化を行う別の処理部が設けられてもよい。当該処理部は、制御装置22に設けられてもよい。
In FIG. 12, it has been described that the movement history of the electrically power-assisted
また、当該処理部は、電動アシスト自転車1に備えられていなくてもよく、例えば、スマートフォンのアプリケーション、または、クラウドサーバ上のアプリケーション等で実現されてもよい。当該処理部がスマートフォンのアプリケーション等で実現される場合、スマートフォンのアプリケーションが、電動アシスト自転車1が外部のサーバ装置等に送信した、踏力センサ33、クランク回転センサ31、モータ回転センサ32、および圧力センサ45が検出したデータ、ならびに、挙動推定部221および押し歩き制御部222の出力した判定結果等を取得し、当該移動履歴の可視化処理を行う。スマートフォンのアプリケーションが取得する情報は上述したものの一部でもよいし、上述したものに限らず、他のデータも取得してもよい。
Also, the processing unit may not be provided in the electrically power-assisted
[電動アシスト自転車の制御方法]
ここで、上述した電動アシスト自転車の制御方法について、再度まとめて記載する。
[Method of controlling electric assist bicycle]
Here, the control method of the above-described power-assisted bicycle will be summarized again.
図13は、実施の形態における電動アシスト自転車の制御方法の処理を示すフローチャートである。 FIG. 13 is a flow chart showing the processing of the control method for the power-assisted bicycle according to the embodiment.
まず、第1検出部は、電動アシスト自転車1のペダル踏力またはクランク回転数と、車体速度とを検出する(ステップS200)。
First, the first detection section detects the pedaling force or the number of rotations of the crank of the electrically assisted
次に、第1判定部は、電動アシスト自転車1が、停止、押し歩き、惰性走行および通常走行のうちの少なくとも一つの状態であるかを判定する(ステップS201)。
Next, the first determination unit determines whether the power-assisted
続いて、第2判定部は、ステップS201での判定結果に基づいて、電動アシスト自転車1が、押し歩き、および、惰性走行のうちのいずれの状態であるかを判定する(ステップS202)。
Subsequently, the second determination unit determines whether the power-assisted
そして、電動アシスト部は、第2判定部が、電動アシスト自転車1が押し歩きの状態であると判定した場合、押し歩き用の電動アシストを行う(ステップS203)。また、電動アシスト部は、第1判定部が押し歩きの状態であると判定した場合にも、押し歩き用の電動アシストを行ってもよい。
Then, when the second determination unit determines that the power-assisted
[効果等]
電動アシスト自転車1の制御方法は、電動アシスト自転車1におけるペダル踏力またはクランク回転数と、車体速度とを検出する第1検出ステップと、ペダル踏力またはクランク回転数と、車体速度とを用いて、電動アシスト自転車1が、停止、押し歩き、惰性走行および通常走行のうちの少なくとも1つの状態であるかを判定する第1判定ステップと、第1判定ステップが行われてから所定時間経過した後に、第1判定ステップでの判定結果に基づいて、電動アシスト自転車1が押し歩き、および、惰性走行のうちのいずれの状態であるかを判定する第2判定ステップと、第2判定ステップで、電動アシスト自転車1が押し歩きの状態であると判定した場合に、電動アシスト自転車1が備えるモータを駆動して、押し歩きを支援するための電動アシストを行う電動アシストステップと、を含む。
[Effects, etc.]
The control method of the electrically power-assisted
これにより、電動アシスト自転車1の制御方法は、ユーザ2からの回答の入力無しに、電動アシスト自転車1の走行状態を判定することができる。よって、電動アシスト自転車1の制御方法は、電動アシスト自転車1の走行状態に合わせたアシストを、より適切に電動アシスト自転車1に行わせることができる。
As a result, the control method of the power-assisted
また、例えば、電動アシスト自転車1の制御方法は、第2判定ステップでは、第1判定ステップでの判定結果に応じて、異なる判定基準を用いる。
Further, for example, in the control method of the power-assisted
これにより、電動アシスト自転車1の制御方法は、判定が行われる直前の電動アシスト自転車1の走行状態を、判定処理の過程にフィードバックすることができる。よって、電動アシスト自転車1の制御方法は、より適切に電動アシスト自転車1の走行状態を判定することができる。
As a result, the control method for the electrically power-assisted
また、例えば、電動アシスト自転車の制御方法は、第2判定ステップでは、車体速度が判定値より大きいとき、前記電動アシスト自転車が前記惰性走行の状態であると判定し、車体速度が前記判定値以下のとき、電動アシスト自転車が押し歩きの状態であると判定し、第1判定ステップでの判定結果に応じて、異なる判定値を用いる。 Further, for example, in the method for controlling the electrically power-assisted bicycle, in the second determination step, when the vehicle body speed is greater than the determination value, it is determined that the electrically power-assisted bicycle is in the coasting state, and the vehicle body speed is equal to or less than the determination value. When , it is determined that the power-assisted bicycle is in the state of pushing and walking, and a different determination value is used according to the determination result in the first determination step.
これにより、電動アシスト自転車1の制御方法は、判定が行われる直前の電動アシスト自転車1の走行状態を、判定処理の過程で用いられる判定値にフィードバックすることができる。よって、電動アシスト自転車1の制御方法は、より適切に電動アシスト自転車1の走行状態を判定することができる。
As a result, the control method of the electrically power-assisted
また、例えば、第1判定ステップで、電動アシスト自転車1が通常走行または惰性走行の状態であると判定されたときの判定値は、第1判定ステップで、電動アシスト自転車1が押し歩きの状態であると判定されたときの判定値よりも小さく、第1判定ステップで、電動アシスト自転車1が押し歩きの状態であると判定されたときの判定値は、第1判定ステップで、電動アシスト自転車1が停止の状態であると判定されたときの判定値よりも小さい。
Further, for example, when it is determined in the first determination step that the power-assisted
これにより、電動アシスト自転車1の制御方法は、判定が行われる直前の電動アシスト自転車1の走行状態に応じて、適切な判定値を用いることができる。よって、電動アシスト自転車1の制御方法は、より適切に電動アシスト自転車1の走行状態を判定することができる。
As a result, the method of controlling the electrically power-assisted
また、例えば、電動アシスト自転車1の制御方法は、さらに、電動アシスト自転車1のハンドル14に備えられた圧力センサ45から、ハンドル14にかかる所定以上の圧力を検出する第2検出ステップを含み、電動アシストステップでは、検出された圧力に基づいて、電動アシストを行う。
Further, for example, the control method of the electrically power-assisted
これにより、電動アシスト自転車1の制御方法は、ユーザ2が電動アシスト自転車1の押し歩きをしていることを、圧力の測定によって検知させることができ、電動アシスト自転車1が、ユーザ2が電動アシスト自転車1の押し歩きをしていることを検知した場合、押し歩き用のアシストを、電動アシスト自転車1に行わせることができる。
As a result, the control method of the power-assisted
また、例えば、電動アシスト自転車1の制御方法は、第1判定ステップで、電動アシスト自転車1の状態が押し歩きの状態であると判定されたときに、第2判定ステップで、電動アシスト自転車1が押し歩き、および、惰性走行のうちのいずれの状態であるかを、判定値を用いて判定し、第1判定ステップで、電動アシスト自転車1の状態が通常走行または惰性走行の状態であると判定されたときに、第2判定ステップで、電動アシスト自転車1が惰性走行の状態であると判定し、第1判定ステップで、電動アシスト自転車1の状態が停止の状態であると判定されたときに、第2判定ステップで、電動アシスト自転車1が押し歩きの状態であると判定する。
Further, for example, in the control method of the power-assisted
これにより、電動アシスト自転車1の制御方法は、判定が行われる直前の電動アシスト自転車1の走行状態が押し歩きのときに、電動アシスト自転車1の走行状態の判定を行うことができる。よって、電動アシスト自転車1の制御方法は、より簡便な方法で、電動アシスト自転車1の走行状態を判定することができる。
As a result, the control method of the electrically power-assisted
また、電動アシスト自転車1の制御装置は、電動アシスト自転車1におけるペダル踏力またはクランク回転数と、車体速度とを取得する取得部223と、取得部223が取得したペダル踏力またはクランク回転数と、車体速度とを用いて、電動アシスト自転車1が、停止、押し歩き、惰性走行および通常走行のうちのいずれの状態であるかを判定する第1判定部と、第1判定部での判定結果に基づいて、電動アシスト自転車が押し歩き、および、惰性走行のうちのいずれの状態であるかを判定する第2判定部と、第2判定部で、電動アシスト自転車1が押し歩きの状態であると判定した場合に、電動アシスト自転車1が備えるモータを駆動して、押し歩きを支援するための電動アシストを行う電動アシスト部と、を備える。
In addition, the control device of the electrically assisted
これにより、電動アシスト自転車1の制御装置は、上記電動アシスト自転車1の制御方法と同様の効果を奏することができる。
As a result, the control device for the power-assisted
また、電動アシスト自転車1は、電動アシスト自転車1におけるペダル踏力またはクランク回転数と、車体速度とを検出する第1検出部と、ペダル踏力またはクランク回転数と、車体速度とを用いて、電動アシスト自転車1が、停止、押し歩き、惰性走行および通常走行のうちのいずれの状態であるかを判定する第1判定部と、第1判定部での判定結果に基づいて、電動アシスト自転車1が押し歩き、および、惰性走行のうちのいずれの状態であるかを判定する第2判定部と、第2判定部で、電動アシスト自転車1が押し歩きの状態であると判定した場合に、電動アシスト自転車1が備えるモータを駆動して、押し歩きを支援するための電動アシストを行う電動アシスト部と、を備える。
In addition, the electrically power-assisted
これにより、電動アシスト自転車1は、上記電動アシスト自転車1の制御方法と同様の効果を奏することができる。
As a result, the power-assisted
また、例えば、電動アシスト自転車1において、第1判定部または第2判定部は、電動アシスト自転車1が備える電動アシストユニットに搭載される。
Further, for example, in the power-assisted
これにより、電動アシスト自転車1は、本体において、自身の走行状態を判定することができる。
As a result, the power-assisted
また、例えば、電動アシスト自転車1において、第1判定部または第2判定部は、手元スイッチまたはサイクルコンピュータに搭載される。
Further, for example, in the power-assisted
これにより、電動アシスト自転車1は、本体の付属品において、自身の走行状態を判定することができる。
As a result, the power-assisted
[その他]
また、実施の形態において、ユニット、装置、部材、または、部の全部、または、一部、または、図4に示されるブロック図の機能ブロックの全部、または、一部は、半導体装置、半導体集積回路(IC(Integrated Circuit))、または、大規模集積回路(LSI(Large Scale Integration))を含む一つ、または、複数の電子回路によって実行されてもよい。IC、または、LSIは、一つのチップ(システムLSI)に集積されてもよいし、複数のチップを組み合わせて一つのシステム(チップセット)に構成されてもよい。例えば、画面の表示処理以外の機能ブロックは、一つのチップに集積されてもよい。ここでは、IC、または、LSIと呼んでいるが、集積の度合いによって呼び方が変わり、VLSI(Very Large Scale Integration)、若しくはULSI(Ultra Large Scale Integration)と呼ばれるものであってもよい。LSIの製造後にプログラムされる電子ヒューズ(eFuse)を搭載したシステムLSI、または、FPGA(Field Programmable Gate Array)、または、LSI内部の接続関係の再構成、または、LSI内部の論理回路の動的な再構成ができるリコンフィギュラブルデバイス(reconfigurable device)も同じ目的で使うことができる。
[others]
Further, in the embodiments, all or part of the units, devices, members, or sections, or all or part of the functional blocks in the block diagram shown in FIG. It may be implemented by one or more electronic circuits including a circuit (IC (Integrated Circuit)) or a large scale integration (LSI (Large Scale Integration)). The IC or LSI may be integrated into one chip (system LSI), or may be configured into one system (chipset) by combining a plurality of chips. For example, functional blocks other than screen display processing may be integrated into one chip. Here, they are called ICs or LSIs, but they may be called VLSI (Very Large Scale Integration) or ULSI (Ultra Large Scale Integration) depending on the degree of integration. A system LSI equipped with an electronic fuse (eFuse) that is programmed after the LSI is manufactured, or an FPGA (Field Programmable Gate Array), or a reconfiguration of the connection relationship inside the LSI, or a dynamic logic circuit inside the LSI. A reconfigurable device that can be reconfigured can also be used for the same purpose.
さらに、ユニット、装置、部材、または、部の全部、または、一部の機能、または、操作は、ソフトウエア処理によって実行することが可能である。この場合、ソフトウエアは一つ、または、複数のROM、光学ディスク、ハードディスクドライブなどの非一時的記録媒体に記録され、ソフトウエアがマイクロコントローラ(MCU(microcontroller))、または、マイクロプロセッサ(MPU(microprocessor))等の処理装置(processor)によって実行されたときに、そのソフトウエアで特定された機能が処理装置および周辺装置によって実行される。システム、または、装置は、ソフトウエアが記録されている一つ、または、複数の非一時的記録媒体、処理装置、および必要とされるハードウェアデバイス、例えばデジタルインターフェース、を備えていても良い。 Further, all or some functions or operations of units, devices, members or sections may be performed by software processing. In this case, the software is recorded in one or more non-transitory recording media such as ROM, optical disk, hard disk drive, etc. When executed by a processor such as a microprocessor, the functions specified in the software are performed by the processor and peripheral devices. A system or apparatus may comprise one or more non-transitory storage media on which software is recorded, a processing unit and required hardware devices such as a digital interface.
また、上記各実施の形態における制御装置22は、プロセッサとメモリとを有し、メモリには、図9または図13に示すフローチャートの各ステップを実行するためのプログラムが記憶されていてもよい。この場合、プロセッサは、そのメモリに記憶されているプログラムを実行する。
Further, the
1 電動アシスト自転車
10 車体
20 モータ駆動ユニット
31 クランク回転センサ
32 モータ回転センサ
33 踏力センサ
40 操作部
45 圧力センサ
221 挙動推定部
222 押し歩き制御部
223 取得部
1 Power-assisted
Claims (10)
前記電動アシスト自転車におけるペダル踏力またはクランク回転数と、車体速度とを検出する第1検出ステップと、
前記ペダル踏力または前記クランク回転数と、前記車体速度とを用いて、前記電動アシスト自転車が、停止、押し歩き、惰性走行および通常走行のうちの少なくとも1つの状態であるかを判定する第1判定ステップと、
前記第1判定ステップが行われてから所定時間経過した後に、前記第1判定ステップでの判定結果に基づいて、前記電動アシスト自転車が前記押し歩き、および、前記惰性走行のうちのいずれの状態であるかを判定する第2判定ステップと、
前記電動アシスト自転車が前記押し歩きの状態であると前記第2判定ステップで判定した場合に、前記電動アシスト自転車が備えるモータを駆動して、前記押し歩きを支援するための電動アシストを行う電動アシストステップと、を含む、
電動アシスト自転車の制御方法。 A control method for an electrically assisted bicycle,
a first detection step of detecting the pedaling force or the number of rotations of the crank and the speed of the vehicle body of the electrically assisted bicycle;
A first determination for determining whether the power-assisted bicycle is in at least one state of stopping, pushing, coasting, and normal running, using the pedaling force or the crank rotation speed, and the vehicle body speed. a step;
After a predetermined period of time has elapsed since the first determination step was performed, the power-assisted bicycle is in either the pushing-walking state or the coasting state based on the determination result in the first determining step. a second determination step of determining whether there is
When it is determined in the second determination step that the electrically power-assisted bicycle is in the state of pushing and walking, a motor provided in the electrically power-assisted bicycle is driven to perform electric assist for assisting the pushing-walking. including steps and
A control method for an electrically assisted bicycle.
請求項1に記載の電動アシスト自転車の制御方法。 In the second determination step, depending on the determination result in the first determination step, different determination criteria are used to determine whether the power-assisted bicycle is in one of the pushing-walking state and the coasting state. determine the
A control method for an electrically assisted bicycle according to claim 1.
前記車体速度が判定値より大きいとき、前記電動アシスト自転車が前記惰性走行の状態であると判定し、
前記車体速度が前記判定値以下のとき、前記電動アシスト自転車が前記押し歩きの状態であると判定し、
前記第1判定ステップでの判定結果に応じて、異なる前記判定値を用いて、前記電動アシスト自転車が前記押し歩き、および、前記惰性走行のうちのいずれの状態であるかを判定する、
請求項2に記載の電動アシスト自転車の制御方法。 In the second determination step,
determining that the electrically power-assisted bicycle is in the coasting state when the vehicle body speed is greater than a determination value;
determining that the electrically power-assisted bicycle is in the state of pushing and walking when the vehicle body speed is equal to or less than the determination value;
Determining whether the electrically power-assisted bicycle is in one of the pushing-walking state and the inertial running state using a different determination value according to the determination result of the first determination step;
A control method for an electrically assisted bicycle according to claim 2.
前記第1判定ステップで、前記電動アシスト自転車が前記押し歩きの状態であると判定されたときの前記判定値は、前記第1判定ステップで、前記電動アシスト自転車が前記停止の状態であると判定されたときの前記判定値よりも小さい、
請求項3に記載の電動アシスト自転車の制御方法。 When it is determined in the first determination step that the power-assisted bicycle is in the normal running state or the inertia running state, the determination value in the first determination step is that the power-assisted bicycle is in the state of pushing and walking. smaller than the determination value when it is determined to be in a state,
The determination value when it is determined in the first determination step that the power-assisted bicycle is in the state of pushing and walking is determined in the first determination step to be that the power-assisted bicycle is in the state of stopping. is smaller than the judgment value when
A control method for an electrically assisted bicycle according to claim 3.
前記電動アシストステップでは、検出された前記圧力に基づいて、前記電動アシストを行う、
請求項1~4のいずれか1項に記載の電動アシスト自転車の制御方法。 Furthermore, a second detection step of detecting a predetermined pressure or more applied to the handle from a pressure sensor provided on the handle of the electrically assisted bicycle,
In the electric assist step, the electric assist is performed based on the detected pressure.
A control method for a power-assisted bicycle according to any one of claims 1 to 4.
前記第1判定ステップで、前記電動アシスト自転車の状態が前記通常走行または前記惰性走行の状態であると判定されたときに、前記第2判定ステップで、前記電動アシスト自転車が前記惰性走行の状態であると判定し、
前記第1判定ステップで、前記電動アシスト自転車の状態が前記停止の状態であると判定されたときに、前記第2判定ステップで、前記電動アシスト自転車が前記押し歩きの状態であると判定する、
請求項1に記載の電動アシスト自転車の制御方法。 When it is determined in the first determination step that the state of the power-assisted bicycle is the state of pushing and walking, in the second determination step, the power-assisted bicycle is in the state of pushing and walking and the inertia running. Use the judgment value to determine which state of the
When it is determined in the first determination step that the state of the power-assisted bicycle is in the normal running state or the inertia running state, in the second determination step, the power-assisted bicycle is in the inertia running state. determine that there is
When the state of the power-assisted bicycle is determined to be the stopped state in the first determination step, the power-assisted bicycle is determined to be in the state of pushing and walking in the second determination step.
A control method for an electrically assisted bicycle according to claim 1.
前記電動アシスト自転車におけるペダル踏力またはクランク回転数と、車体速度とを取得する取得部と、
前記取得部が取得した前記ペダル踏力または前記クランク回転数と、前記車体速度とを用いて、前記電動アシスト自転車が、停止、押し歩き、惰性走行および通常走行のうちのいずれの状態であるかを判定する第1判定部と、
前記第1判定部での判定結果に基づいて、前記電動アシスト自転車が前記押し歩き、および、前記惰性走行のうちのいずれの状態であるかを判定する第2判定部と、
前記第2判定部で、前記電動アシスト自転車が前記押し歩きの状態であると判定した場合に、前記電動アシスト自転車が備えるモータを駆動して、前記押し歩きを支援するための電動アシストを行う電動アシスト部と、を備える、
電動アシスト自転車の制御装置。 A control device for an electrically assisted bicycle,
an acquisition unit that acquires a pedal effort or crank rotation speed and a vehicle body speed of the electrically assisted bicycle;
Using the pedal depression force or the crank rotation speed acquired by the acquisition unit and the vehicle body speed, it is determined whether the power-assisted bicycle is in a stopped state, a push-walking state, an inertia running state, or a normal running state. a first determination unit that determines;
a second determination unit that determines, based on the result of determination by the first determination unit, whether the electrically power-assisted bicycle is in one of the pushing-walking state and the coasting state;
When the second determining unit determines that the electrically power-assisted bicycle is in the state of pushing and walking, an electric motor that drives a motor included in the electrically power-assisted bicycle to perform electric assist for assisting the pushing-walking. an assist section,
A control device for an electrically assisted bicycle.
前記電動アシスト自転車におけるペダル踏力またはクランク回転数と、車体速度とを検出する第1検出部と、
前記ペダル踏力または前記クランク回転数と、前記車体速度とを用いて、前記電動アシスト自転車が、停止、押し歩き、惰性走行および通常走行のうちのいずれの状態であるかを判定する第1判定部と、
前記第1判定部での判定結果に基づいて、前記電動アシスト自転車が前記押し歩き、および、前記惰性走行のうちのいずれの状態であるかを判定する第2判定部と、
前記第2判定部で、前記電動アシスト自転車が前記押し歩きの状態であると判定した場合に、前記電動アシスト自転車が備えるモータを駆動して、前記押し歩きを支援するための電動アシストを行う電動アシスト部と、を備える、
電動アシスト自転車。 An electrically assisted bicycle,
a first detection unit that detects the pedaling force or the number of rotations of the crank and the speed of the vehicle body of the electrically assisted bicycle;
A first determination unit that determines whether the power-assisted bicycle is in a stopped state, a push-walking state, an inertia running state, or a normal running state, using the pedaling force or the crank rotation speed, and the vehicle body speed. and,
a second determination unit that determines, based on the result of determination by the first determination unit, whether the electrically power-assisted bicycle is in one of the pushing-walking state and the coasting state;
When the second determining unit determines that the electrically power-assisted bicycle is in the state of pushing and walking, an electric motor that drives a motor included in the electrically power-assisted bicycle to perform electric assist for assisting the pushing-walking. an assist section,
electric assist bicycle.
請求項8に記載の電動アシスト自転車。 The first determination section or the second determination section is mounted on an electric assist unit included in the electric assist bicycle,
The electrically assisted bicycle according to claim 8.
請求項8に記載の電動アシスト自転車。 The first determination unit or the second determination unit is mounted on a hand switch or a cycle computer,
The electrically assisted bicycle according to claim 8.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019229825A JP7285452B2 (en) | 2019-12-20 | 2019-12-20 | Electric assist bicycle control method, electric assist bicycle control device, and electric assist bicycle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019229825A JP7285452B2 (en) | 2019-12-20 | 2019-12-20 | Electric assist bicycle control method, electric assist bicycle control device, and electric assist bicycle |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021098389A JP2021098389A (en) | 2021-07-01 |
| JP7285452B2 true JP7285452B2 (en) | 2023-06-02 |
Family
ID=76540651
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019229825A Active JP7285452B2 (en) | 2019-12-20 | 2019-12-20 | Electric assist bicycle control method, electric assist bicycle control device, and electric assist bicycle |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7285452B2 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113859418A (en) * | 2021-10-27 | 2021-12-31 | 深圳爱玛智行科技有限公司 | Power-assisted push control system and method for electric vehicle |
| JP2023172536A (en) * | 2022-05-24 | 2023-12-06 | キヤノン株式会社 | Communication device, communication control method, and computer program |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000168672A (en) | 1998-12-04 | 2000-06-20 | Suzuki Motor Corp | Electric motor-assisted bicycle |
| JP2007191114A (en) | 2006-01-23 | 2007-08-02 | Matsushita Electric Ind Co Ltd | Vehicle with power assist |
| JP4358988B2 (en) | 1997-10-21 | 2009-11-04 | ノバルティス アクチエンゲゼルシャフト | Single mold centering |
| WO2013132535A1 (en) | 2012-03-08 | 2013-09-12 | パナソニック株式会社 | Electric bicycle |
| JP2017088155A (en) | 2015-11-09 | 2017-05-25 | 太陽誘電株式会社 | Regeneration control device of electric motor, regeneration driving device of electric motor, and electric auxiliary vehicle |
| JP2019177719A (en) | 2018-03-30 | 2019-10-17 | パナソニックIpマネジメント株式会社 | Electric bicycle and control method of electric bicycle |
| JP2019209849A (en) | 2018-06-05 | 2019-12-12 | パナソニックIpマネジメント株式会社 | Motor unit and electric bicycle |
-
2019
- 2019-12-20 JP JP2019229825A patent/JP7285452B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4358988B2 (en) | 1997-10-21 | 2009-11-04 | ノバルティス アクチエンゲゼルシャフト | Single mold centering |
| JP2000168672A (en) | 1998-12-04 | 2000-06-20 | Suzuki Motor Corp | Electric motor-assisted bicycle |
| JP2007191114A (en) | 2006-01-23 | 2007-08-02 | Matsushita Electric Ind Co Ltd | Vehicle with power assist |
| WO2013132535A1 (en) | 2012-03-08 | 2013-09-12 | パナソニック株式会社 | Electric bicycle |
| JP2017088155A (en) | 2015-11-09 | 2017-05-25 | 太陽誘電株式会社 | Regeneration control device of electric motor, regeneration driving device of electric motor, and electric auxiliary vehicle |
| JP2019177719A (en) | 2018-03-30 | 2019-10-17 | パナソニックIpマネジメント株式会社 | Electric bicycle and control method of electric bicycle |
| JP2019209849A (en) | 2018-06-05 | 2019-12-12 | パナソニックIpマネジメント株式会社 | Motor unit and electric bicycle |
Non-Patent Citations (1)
| Title |
|---|
| オーナーズマニュアル RIDE+ 電動自転車,日本,トレックジャパン株式会社,2017年 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021098389A (en) | 2021-07-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5575938B1 (en) | Bicycle control device | |
| US20190300115A1 (en) | Human-powered vehicle control device | |
| US11124266B2 (en) | Human-powered vehicle control device | |
| KR101516075B1 (en) | Eletricity bike control system and method for control the same | |
| JP7249540B2 (en) | FAILURE DETECTION DEVICE, ELECTRIC BICYCLE, AND FAILURE DETECTION METHOD | |
| US11124267B2 (en) | Human-powered vehicle control device | |
| JP7113323B2 (en) | Electric bicycle and control method of electric bicycle | |
| JP7285452B2 (en) | Electric assist bicycle control method, electric assist bicycle control device, and electric assist bicycle | |
| US20230034689A1 (en) | Human-powered vehicle control device, suspension system, and human-powered vehicle | |
| US10604210B2 (en) | Human-powered vehicle control device | |
| JP2022104358A (en) | Control device for human-powered vehicle and control system for human-powered vehicle | |
| JP2016088374A (en) | Electric power-assisted bicycle | |
| US11377166B2 (en) | Human-powered vehicle control device | |
| JP7142265B2 (en) | Electric bicycle and control method of electric bicycle | |
| WO2022172424A1 (en) | Electrically powered bicycle control method, electrically powered bicycle control device, and electrically powered bicycle | |
| JP6475108B2 (en) | Bicycle with electric motor | |
| JP7126139B2 (en) | Electric bicycle and its control method | |
| US20220204129A1 (en) | Control device for human-powered vehicle | |
| JP7108915B2 (en) | Electric bicycles and methods of controlling electric bicycles | |
| JP7125889B2 (en) | Manpowered vehicle controller | |
| JP2020029207A (en) | Control device for man power driving vehicle | |
| JP6738400B2 (en) | Bicycle with electric motor | |
| JP7324694B2 (en) | Discrimination device for human-powered vehicle and control device for human-powered vehicle | |
| JP2023151107A (en) | Control device for man power drive vehicle | |
| JP2021091291A (en) | Electric bicycle and control device for electric bicycle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221017 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230412 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230425 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230508 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7285452 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |