JP7204911B2 - 基板検査装置、基板検査システム及び基板検査方法 - Google Patents
基板検査装置、基板検査システム及び基板検査方法 Download PDFInfo
- Publication number
- JP7204911B2 JP7204911B2 JP2021524803A JP2021524803A JP7204911B2 JP 7204911 B2 JP7204911 B2 JP 7204911B2 JP 2021524803 A JP2021524803 A JP 2021524803A JP 2021524803 A JP2021524803 A JP 2021524803A JP 7204911 B2 JP7204911 B2 JP 7204911B2
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- image
- captured image
- processing
- inspected
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



















Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F1/00—Originals for photomechanical production of textured or patterned surfaces, e.g., masks, photo-masks, reticles; Mask blanks or pellicles therefor; Containers specially adapted therefor; Preparation thereof
- G03F1/68—Preparation processes not covered by groups G03F1/20 - G03F1/50
- G03F1/82—Auxiliary processes, e.g. cleaning or inspecting
- G03F1/84—Inspecting
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0004—Industrial image inspection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/95—Investigating the presence of flaws or contamination characterised by the material or shape of the object to be examined
- G01N21/9501—Semiconductor wafers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/95—Investigating the presence of flaws or contamination characterised by the material or shape of the object to be examined
- G01N21/956—Inspecting patterns on the surface of objects
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/95—Investigating the presence of flaws or contamination characterised by the material or shape of the object to be examined
- G01N21/956—Inspecting patterns on the surface of objects
- G01N21/95607—Inspecting patterns on the surface of objects using a comparative method
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/20—Exposure; Apparatus therefor
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70483—Information management; Active and passive control; Testing; Wafer monitoring, e.g. pattern monitoring
- G03F7/70605—Workpiece metrology
- G03F7/70616—Monitoring the printed patterns
- G03F7/7065—Defects, e.g. optical inspection of patterned layer for defects
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/027—Making masks on semiconductor bodies for further photolithographic processing not provided for in group H01L21/18 or H01L21/34
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L22/00—Testing or measuring during manufacture or treatment; Reliability measurements, i.e. testing of parts without further processing to modify the parts as such; Structural arrangements therefor
- H01L22/10—Measuring as part of the manufacturing process
- H01L22/12—Measuring as part of the manufacturing process for structural parameters, e.g. thickness, line width, refractive index, temperature, warp, bond strength, defects, optical inspection, electrical measurement of structural dimensions, metallurgic measurement of diffusions
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L22/00—Testing or measuring during manufacture or treatment; Reliability measurements, i.e. testing of parts without further processing to modify the parts as such; Structural arrangements therefor
- H01L22/20—Sequence of activities consisting of a plurality of measurements, corrections, marking or sorting steps
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20081—Training; Learning
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20084—Artificial neural networks [ANN]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30108—Industrial image inspection
- G06T2207/30148—Semiconductor; IC; Wafer
Landscapes
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Biochemistry (AREA)
- Pathology (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Immunology (AREA)
- General Health & Medical Sciences (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Quality & Reliability (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Testing Or Measuring Of Semiconductors Or The Like (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
- Image Analysis (AREA)
Description
図示するように、基板検査システム1は、複数の基板処理システム10と、全体制御装置20とを有している。なお、基板検査システム1が有する基板処理システム10の台数は1つであってもよい。
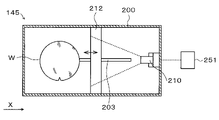
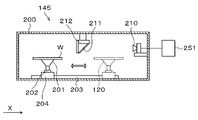
図5及び図6はそれぞれ、検査用撮像装置145の構成の概略を示す縦断面図及び横断面図である。
検査用撮像装置145は、図5及び図6に示すように、ケーシング200を有している。ケーシング200内には、ウェハWが載置される載置台201が設けられている。この載置台201は、モータ等の回転駆動部202によって、回転、停止が自在である。ケーシング200の底面には、ケーシング200内の一端側(図6中のX方向負方向側)から他端側(図6中のX方向正方向側)まで延伸するガイドレール203が設けられている。載置台201と回転駆動部202は、ガイドレール203上に設けられ、駆動装置204によってガイドレール203に沿って移動できる。
図2に示すように第1のブロックG1~第4のブロックG4に囲まれた領域には、ウェハ搬送領域Dが形成されている。ウェハ搬送領域Dには、例えばY方向、X方向、θ方向及び上下方向に移動自在な搬送アーム160aを有する、ウェハ搬送装置160が複数配置されている。ウェハ搬送装置160は、ウェハ搬送領域D内を移動し、周囲の第1のブロックG1、第2のブロックG2、第3のブロックG3及び第4のブロックG4内の所望の装置にウェハWを搬送できる。
基板検査システム1は、前述のように、全体制御装置20を有する。
全体制御装置20は、例えばCPUやメモリ等を備えたコンピュータであり、プログラム格納部(図示せず)を有している。このプログラム格納部には、後述の画像推定モデルを作成するためのプログラムが格納されている。なお、上記プログラムは、コンピュータで読み取り可能な記憶媒体に記録されていたものであって、当該記憶媒体から全体制御装置20にインストールされたものであってもよい。プログラムの一部または全ては専用ハードウェア(回路基板)で実現してもよい。
全体制御装置20は、図示するように、記憶部301と、モデル作成部302とを有する。
また、画像推定モデルは、例えば、条件付き敵対的生成ネットワークやpix2pixにおいて、入力された任意の画像を変換して偽物画像を生成する生成ネットワーク(Generator)である。
そして、条件付き敵対的生成ネットワークによる機械学習やpix2pixでは、識別ネットワークについて、上記識別が正確に行われるよう識別方法が学習され、また、生成ネットワークについて、識別ネットワークにおいて偽物画像が本物画像であると認識されるよう画像の変換方法が学習される。
モデル作成部302で作成された画像推定モデルは、基板処理システム10の撮像制御装置251に送られる。
この撮像画像取得部312は、基板処理システム10での所望の処理前及び上記所望の処理後の検査対象ウェハWの撮像画像を取得し、また、上記所望の処理前及び所望の処理後の検査対象ウェハWの撮像画像であって画像推定モデルの作成に用いられる撮像画像を取得する。
続いて、ウェハWが、第2のブロックG2の下層膜用の熱処理装置130に搬送され、下層膜の加熱処理が行われる。
その後、ウェハWが、検査用撮像装置153へ搬送される。そして、撮像制御装置251の制御の下、撮像部210による下層膜形成後のウェハWの撮像が行われ、当該下層膜形成後のウェハWの撮像画像が取得される。
続いて、ウェハWが、第2のブロックG2の中間層用の熱処理装置130に搬送され、中間層膜の加熱処理が行われる。
その後、ウェハWが、検査用撮像装置146へ搬送される。そして、撮像制御装置251の制御の下、撮像部210による中間層膜形成後のウェハWの撮像が行われ、撮像画像取得部312により、当該中間層膜形成後のウェハWの撮像画像が取得される。
続いて、ウェハWが、第2のブロックG2のPAB処理用の熱処理装置130に搬送され、PAB処理が行われる。
その後、ウェハWが、検査用撮像装置153へ搬送される。そして、撮像制御装置251の制御の下、撮像部210によるレジスト膜形成後のウェハWの撮像が行われ、撮像画像取得部312により、当該レジスト膜形成後のウェハWの撮像画像が取得される。
続いて、ウェハWが、第2のブロックG2のPEB処理用の熱処理装置130に搬送され、PEB処理が行われる。
次に、ウェハが、第1のブロックG1の現像処理装置120に搬送され、現像処理が行われ、当該ウェハW上にレジストパターンが形成される。
その後、ウェハWが検査用撮像装置147に搬送される。そして、撮像制御装置251の制御の下、撮像部によるレジストパターン形成後のウェハWの撮像が行われ、撮像画像取得部312により、当該レジストパターン形成後のウェハWの撮像画像が取得される。
この欠陥の有無の判定では、例えば、レジストパターン形成後のウェハWについて、撮像画像と推定画像とが比較され、両画像の画素値に閾値以上の差がある部分は、欠陥が存在する部分と判定され、それ以外の部分は、欠陥がない部分と判定される。
図8は、従来の欠陥検査の一例を説明するための概念図であり、図9は、本実施形態にかかる欠陥検査の一例を説明するための概念図である。図8及び図9において、横軸は、ウェハ上のある方向に沿った各部分の当該方向に関する座標を示し、縦軸は、上記各部分の画素値等の値を示す。図8(A)には、検査対象ウェハWの撮像画像Ipと後述の平均画像Iaの関係の一例が示され、図8(B)には、検査対象ウェハWの撮像画像Ipと後述の平均画像Iaとの差分が示され、図8(C)には、従来の欠陥検査にかかる後述の欠陥判定値Vcの一例が示されている。図9(A)には、検査対象ウェハWの撮像画像Ipと対応する推定画像Ieの関係の一例が示され、図9(B)には、本実施形態にかかる後述の欠陥判定値Vの一例が示されている。
しかし、ムラを除去するためのバリエーションフィルタとしての上記標準偏差画像Isは、ウェハW毎に固有のものではなくムラを正確に現したものではない。そのため、図8(C)に示すように、欠陥判定値において有意な値を有する部分に、欠陥K1、K2、K3に起因する部分だけでなく、ムラUに起因する部分も含まれる。このムラUの部分が欠陥として検出されるのを防ぐため、従来の欠陥検査方法では、欠陥判定値に対する上記閾値Tcが大きく設定されている。つまり、検出感度が低く設定されている。そのため、欠陥判定値Vcにおいて大きな値を示す欠陥K1、K2だけ検出され、欠陥判定値Vcにおいて小さな値を示す、検出すべき欠陥K3を検出することができないことがある。
図10及び図11に示すように、画像の各部分において、上記実際の撮像画像の画素値と、上記推定画像の画素値は、近い値を示していた。特に、図11に示すように、ウェハ中央部では、上記実際の撮像画像の画素値と上記推定画像の画素値とは略同一であった。
なお、図10及び図11は、R成分の画素値についてのものであるが、G成分、B成分においても、R成分と同様の傾向を示すことが、本発明者らによって確認されている。
図12及び図13に示すように、画像の各部分において、上記実際の撮像画像の画素値と、上記推定画像の画素値は、近い値を示していた。特に、図13に示すように、ウェハ中央部では、上記実際の撮像画像の画素値と上記推定画像の画素値とは略同一であった。
なお、図12及び図13は、R成分の画素値についてのものであるが、G成分、B成分においても、R成分と同様の傾向を示すことが、本発明者らによって確認されている。
これに代えて、ある基板処理システム10についての画像推定モデルは、当該基板処理システムで取得された撮像画像のみを用いて作成してもよい。これにより、当該基板処理システム10の特性を反映した画像推定モデルを作成することができる。
図14の全体制御装置20aは、図7の全体制御装置20と同様、記憶部301とモデル作成部302とを有する。そして、全体制御装置20aはさらに、多数の撮像画像セットの中から、モデル作成部302での画像推定モデルの作成に用いられる撮像画像セット、すなわち、モデル作成用の撮像画像セットを複数選択する選択部400を有する。なお、撮像画像セットとは、あるウェハWについての基板処理システム10による処理前の撮像画像と処理後の撮像画像との組み合わせからなる画像セットである。
Z1,n=0,m=0 (1)
Z2,n=1,m=1 (r・cosθ)
Z3,n=0,m=-1 (r・sinθ)
Z4,n=2,m=0 (2r2-1)
Z5,n=2,m=2 (r2・cos2θ)
Z6,n=2,m=-2 (r2・sin2θ)
Z7,n=3,m=1 ((3r3-2r)・cosθ)
Z8,n=3,m=-1 ((3r3-2r)・sinθ)
Z9,n=4,m=0 (6r4-6r2+1)
・
・
・
係数算出部402では、ウェハ面内の画素値の平面分布Zを上述のように分解して得られた、画素値の面内傾向成分Ziそれぞれの値を算出する。具体的には、画素値の面内傾向成分Ziの大きさは上述のとおりゼルニケ係数により表されるので、各ゼルニケ係数の値を求めることで画素値の面内傾向成分Ziそれぞれの値を算出する。
なお、マハラノビス距離は、標本点と分布の間の尺度を表すものである。ベクトルyから平均μ及び共分散Σを持つ分布までのマハラノビス距離MDは以下の式で算出することができる。

また、ゼルニケ多項式における各項毎のマハラノビス距離の算出は、例えばRGBそれぞれについて行われる。
さらに、ゼルニケ多項式における各項毎に算出したマハラノビス距離に対して、該当する項における平均値で除算する規格化処理を行ってもよい。
Thc=AbAve+c×AbStd
抽出部404は、算出した閾値Thcを、異常判定の閾値Thとして設定する。なお、算出し設定した閾値Thcが小さすぎると、後述のステップS7のモデル作成用の画像撮像画像セット抽出工程において、必要以上の撮像画像セットがモデル作成用の撮像画像セットから除外される場合もある。したがって、異常判定の閾値Thの下限値を設けておき、上記式に基づいて算出された閾値Thcが上記下限値を下回る場合に、上記下限値を異常判定の閾値Thとしてもよい。これら、上記式に基づく閾値Thcの算出及び異常判定の閾値Thの設定はRGBそれぞれについて行われる。なお、以下では、R、G、Bそれぞれについての異常判定の閾値ThをThr、Thg、Thbとする。
(x1)Rについての異常度Abr≧Rについての異常判定の閾値Thr
(x2)Gについての異常度Abg≧Gについての異常判定の閾値Thg
(x3)Bについての異常度Abb≧Bについての異常判定の閾値Thb
(y1)ゼルニケ多項式における第n項について異常度Abrn≧閾値Thrnである。
(y2)ゼルニケ多項式における第n項について異常度Abgn≧閾値Thgnである。
(y3)ゼルニケ多項式における第n項について異常度Abbn≧閾値Thbnである。
図21に示すように、IN画像でのゼルニケ係数とOUT画像でのゼルニケ係数との相関分布Cが一纏まりとならず、適切なマハラノビス距離を算出することができなくなり、モデル作成用の撮像画像セットを適切に選択できない場合がある。この場合は、相関分布Cを複数のサブ相関分布に分割してもよい。例えば、相関分布Cを図21のように2つのサブ相関分布C1、C2に分割してもよい。そして、距離算出部403が撮像画像セットのマハラノビス距離を算出する際は、当該撮像画像セットが属するサブ相関分布と、当該撮像画像セットを示す点との間のマハラノビス距離を算出するようにしてもよい。
(1)基板を検査する基板検査装置であって、
複数の基板それぞれについての基板処理装置による処理前の撮像画像及び処理後の撮像画像を用いて機械学習により作成された画像推定モデルと、前記基板処理装置による処理前の検査対象基板の撮像画像と、に基づく、前記基板処理装置による処理後の前記検査対象基板の推定画像を取得する取得部と、
前記基板処理装置による処理後の前記検査対象基板の撮像画像と前記推定画像とに基づいて、当該検査対象基板の欠陥の有無を判定する判定部と、を有する、基板検査装置。
前記(1)では、複数の基板についての処理前後の撮像画像を用いて機械学習により作成された画像推定モデルが使用され欠陥検査の基準となる基準画像が生成され、検査対象基板の欠陥の有無の判定が行われる。欠陥検査の基準となる基準画像が、上記画像推定モデルに基づいて生成された推定画像であるため、処理後の検査対象基板についての、撮像画像と基準画像とでムラが略同じになる。したがって、ムラが欠陥として検出される可能性が低いため、欠陥検出精度を向上させることができる。
前記(4)によれば、より正確に欠陥検査を行うことができる。
前記条件付き敵対的生成ネットワークにおける、任意の画像と共に当該任意の画像に対応する本物画像または当該任意の画像に基づいて生成された前記偽物画像が入力され、当該任意の画像と共に入力された画像が前記本物画像であるか前記偽物画像であるかの識別を行う識別ネットワークについて、前記識別が正確に行われるよう識別方法が機械学習され、
前記生成ネットワークについて、前記識別ネットワークにおいて前記偽物画像が前記本物画像であると認識されるよう画像の変換方法が機械学習される、前記(2)~(5)のいずれか1に記載の基板検査装置。
基板を処理する基板処理装置と、
制御装置と、を備え、
前記制御装置は、
複数の基板それぞれについての前記基板処理装置による処理前の撮像画像及び処理後の撮像画像を用い、機械学習により画像推定モデルを作成する作成部と、
前記基板処理装置による処理前の検査対象基板の撮像画像と、前記画像推定モデルとに基づいて、前記基板処理装置による処理後の前記検査対象基板の推定画像を生成する生成部と、
前記基板処理装置による処理後の前記検査対象基板の撮像画像と前記推定画像とに基づいて、当該検査対象基板の欠陥の有無を判定する判定部と、を有する、基板検査システム。
前記条件付き敵対的生成ネットワークにおける、任意の画像と共に当該任意の画像に対応する本物画像または当該任意の画像に基づいて生成された前記偽物画像が入力され、当該任意の画像と共に入力された画像が前記本物画像であるか前記偽物画像であるかの識別を行う識別ネットワークについて、前記識別が正確に行われるよう識別方法が機械学習され、
前記生成ネットワークについて、前記識別ネットワークにおいて前記偽物画像が前記本物画像であると認識されるよう画像の変換方法が機械学習される、前記(6)に記載の基板検査システム。
前記選択部は、前記処理前の基板の撮像画像における画素値の面内傾向と、前記処理後の基板の撮像画像における画素値の面内傾向との相関分布を用いて決定される異常度に基づいて、モデル作成用の前記撮像画像セットを選択する、前記(6)または(7)に記載の基板検査システム。
モデル作成用の前記撮像画像セットの候補として、複数の前記撮像画像セットを取得する候補取得部と、
取得された前記撮像画像セットに含まれる前記基板の撮像画像毎に、当該撮像画像内の画素値の平面分布を、ゼルニケ多項式を用いて複数の画素値の面内傾向成分にそれぞれ分解し、各面内傾向成分のゼルニケ係数をそれぞれ算出する係数算出部と、
ゼルニケ多項式における各項毎に、前記処理前の前記基板の撮像画像におけるゼルニケ係数と、前記処理後の前記基板の撮像画像におけるゼルニケ係数との相関分布に基づいて、前記撮像画像セットそれぞれのマハラノビス距離を算出する距離算出部と、
前記撮像画像セットそれぞれについて、前記マハラノビス距離に基づいて、異常度を決定すると共に、前記異常度に基づいて、前記候補取得部が取得した前記撮像画像セットの中から、前記モデル作成用の前記撮像画像セットを抽出する抽出部と、を有する、前記(8)に記載の基板検査システム。
前記撮像画像セットそれぞれについて、前記距離算出部がゼルニケ多項式における各項毎に算出した前記マハラノビス距離を足し合わせて、前記異常度を決定し、
前記取得部が取得した前記撮像画像セットのうち、マハラノビス距離を足し合わせた前記異常度が閾値を超えないものを、前記モデル作成用の前記撮像画像セットとして抽出する、前記(9)に記載の基板検査システム。
前記抽出部は、前記撮像画像セットのうち、前記異常度が閾値を超えるゼルニケ多項式における項を有さない撮像画像セットを、前記モデル作成用の前記撮像画像セットとして抽出する、前記(9)に記載の基板検査システム。
基板処理装置による処理前の検査対象基板の撮像画像を取得する工程と、
基板処理装置による処理後の前記検査対象基板の撮像画像を取得する工程と、
複数の基板それぞれについての前記基板処理装置による処理前の撮像画像及び処理後の撮像画像を用いて機械学習により作成された画像推定モデルと、前記基板処理装置による処理前の検査対象基板の撮像画像と、に基づく、前記基板処理装置による処理後の前記検査対象基板の推定画像を取得する工程と、
前記基板処理装置による処理後の前記検査対象基板の撮像画像と、前記推定画像とに基づいて、当該検査対象基板の欠陥の有無を判定する工程と、を有する、基板検査方法。
前記条件付き敵対的生成ネットワークにおける、任意の画像と共に当該任意の画像に対応する本物画像または当該任意の画像に基づいて生成された前記偽物画像が入力され、当該任意の画像と共に入力された画像が前記本物画像であるか前記偽物画像であるかの識別を行う識別ネットワークについて、前記識別が正確に行われるよう識別方法が機械学習され、
前記生成ネットワークについて、前記識別ネットワークにおいて前記偽物画像が前記本物画像であると認識されるよう画像の変換方法が機械学習される、前記(12)に記載の基板検査方法。
当該推定モデルは、
基板処理装置による処理前の検査対象基板の撮像画像から、前記基板処理装置による処理後の前記検査対象基板の撮像画像を推定するようにコンピュータを機能させるものであり、
複数の基板それぞれについての前記基板処理装置による処理前の撮像画像及び処理後の撮像画像を用いて、条件付き敵対的生成ネットワークによる機械学習によって作成され、
前記条件付き敵対的生成ネットワークにおいて、入力された任意の画像を変換して偽物画像を生成する生成ネットワークであり、
前記条件付き敵対的生成ネットワークによる機械学習では、任意の画像と共に当該任意の画像に対応する本物画像または当該任意の画像に基づいて生成された前記偽物画像が入力され、当該任意の画像と共に入力された画像が前記本物画像であるか前記偽物画像であるかの識別を行う識別ネットワークについて、前記識別が正確に行われるよう識別方法が学習され、且つ、前記生成ネットワークについて、前記識別ネットワークにおいて前記偽物画像が前記本物画像であると認識されるよう画像の変換方法が学習される、推定モデル。
20 全体制御装置
120 現像処理装置
121 下層膜形成装置
122 中間層膜形成装置
123 レジスト塗布装置
130 熱処理装置
251 撮像制御装置
302 モデル作成部
313 推定画像取得部
314 判定部
Ie 推定画像
Ip 撮像画像
K1、K2、K3 欠陥
W ウェハ
Claims (20)
- 基板を検査する基板検査装置であって、
複数の基板それぞれについての基板処理装置による処理前の撮像画像及び処理後の撮像画像を用いて機械学習により作成された画像推定モデルと、前記基板処理装置による処理前の検査対象基板の撮像画像と、に基づく、前記基板処理装置による処理後の前記検査対象基板の推定画像を取得する取得部と、
前記基板処理装置による処理後の前記検査対象基板の撮像画像と前記推定画像とに基づいて、当該検査対象基板の欠陥の有無を判定する判定部と、を有する、基板検査装置。 - 前記画像推定モデルは、前記基板処理装置による処理後の前記検査対象基板の推定画像を生成する、請求項1に記載の基板検査装置。
- 前記判定部は、前記基板処理装置による処理後の前記検査対象基板の撮像画像と前記推定画像との差分に基づいて、当該検査対象基板の欠陥の有無を判定する、請求項1または2に記載の基板検査装置。
- 前記判定部は、前記基板処理装置による処理後の前記検査対象基板の撮像画像と前記推定画像における基板中央部の画像に基づいて、当該検査対象基板の欠陥の有無を判定する、請求項1~3のいずれか1項に記載の基板検査装置。
- 前記画像推定モデルは、条件付き敵対的生成ネットワークにおいて、入力された任意の画像を変換して推定画像を生成する生成ネットワークであり、
前記条件付き敵対的生成ネットワークにおける、任意の画像と共に当該任意の画像に対応する基板処理後に撮影して得られた撮像画像または当該任意の画像に基づいて生成された前記推定画像が入力され、当該任意の画像と共に入力された画像が前記撮像画像であるか前記推定画像であるかの識別を行う識別ネットワークについて、前記識別が正確に行われるよう識別方法が機械学習され、
前記生成ネットワークについて、前記識別ネットワークにおいて前記推定画像が前記撮像画像であると認識されるよう画像の変換方法が機械学習される、請求項1~4のいずれか1項に記載の基板検査装置。 - 複数の基板それぞれについての前記基板処理装置による処理前の撮像画像及び処理後の撮像画像を用い、機械学習により画像推定モデルを作成する作成部をさらに有する、請求項1~5のいずれか1項に記載の基板検査装置。
- 前記処理前の基板の撮像画像と前記処理後の基板の撮像画像との組み合わせからなる撮像画像セットであってモデル作成用の画像セットを選択する選択部をさらに備え、
前記選択部は、前記処理前の基板の撮像画像における画素値の面内傾向と、前記処理後の基板の撮像画像における画素値の面内傾向との相関分布を用いて決定される異常度に基づいて、モデル作成用の前記撮像画像セットを選択する、請求項6に記載の基板検査装置。 - 前記選択部は、
モデル作成用の前記撮像画像セットの候補として、複数の前記撮像画像セットを取得する候補取得部と、
取得された前記撮像画像セットに含まれる前記基板の撮像画像毎に、当該撮像画像内の画素値の平面分布を、ゼルニケ多項式を用いて複数の画素値の面内傾向成分にそれぞれ分解し、各面内傾向成分のゼルニケ係数をそれぞれ算出する係数算出部と、
ゼルニケ多項式における各項毎に、前記処理前の前記基板の撮像画像におけるゼルニケ係数と、前記処理後の前記基板の撮像画像におけるゼルニケ係数との相関分布に基づいて、前記撮像画像セットそれぞれのマハラノビス距離を算出する距離算出部と、
前記撮像画像セットそれぞれについて、前記マハラノビス距離に基づいて、異常度を決定すると共に、前記異常度に基づいて、前記候補取得部が取得した前記撮像画像セットの中から、前記モデル作成用の前記撮像画像セットを抽出する抽出部と、を有する、請求項7に記載の基板検査装置。 - 前記抽出部は、
前記撮像画像セットそれぞれについて、前記距離算出部がゼルニケ多項式における各項毎に算出した前記マハラノビス距離を足し合わせて、前記異常度を決定し、
前記候補取得部が取得した前記撮像画像セットのうち、マハラノビス距離を足し合わせた前記異常度が閾値を超えないものを、前記モデル作成用の前記撮像画像セットとして抽出する、請求項8に記載の基板検査装置。 - 前記異常度は、前記距離算出部がゼルニケ多項式における各項毎に算出したマハラノビス距離であり、
前記抽出部は、前記撮像画像セットのうち、前記異常度が閾値を超えるゼルニケ多項式における項を有さない撮像画像セットを、前記モデル作成用の前記撮像画像セットとして抽出する、請求項8に記載の基板検査装置。 - 請求項1~10のいずれか1項に記載の基板検査装置と、
基板を処理する基板処理装置と、を有する、基板検査システム。 - 基板を検査する基板検査方法であって、
複数の基板それぞれについての基板処理装置による処理前の撮像画像及び処理後の撮像画像を用いて機械学習により作成された画像推定モデルと、前記基板処理装置による処理前の検査対象基板の撮像画像と、に基づく、前記基板処理装置による処理後の前記検査対象基板の推定画像を取得する工程と、
前記基板処理装置による処理後の前記検査対象基板の撮像画像と、前記推定画像とに基づいて、当該検査対象基板の欠陥の有無を判定する工程と、を有する、基板検査方法。 - 前記画像推定モデルは、前記基板処理装置による処理後の前記検査対象基板の推定画像を生成する、請求項12に記載の基板検査方法。
- 前記判定する工程は、前記基板処理装置による処理後の前記検査対象基板の撮像画像と前記推定画像との差分に基づいて、当該検査対象基板の欠陥の有無を判定する、請求項12または13に記載の基板検査方法。
- 前記判定する工程は、前記基板処理装置による処理後の前記検査対象基板の撮像画像と前記推定画像における基板中央部の画像に基づいて、当該検査対象基板の欠陥の有無を判定する、請求項12~14のいずれか1項に記載の基板検査方法。
- 複数の基板それぞれについての前記基板処理装置による処理前の撮像画像及び処理後の撮像画像を用い、機械学習により画像推定モデルを作成する工程をさらに有する、請求項12~15のいずれか1項に記載の基板検査方法。
- 前記処理前の基板の撮像画像と前記処理後の基板の撮像画像との組み合わせからなる撮像画像セットであってモデル作成用の画像セットを選択する工程をさらに有し、
前記選択する工程は、前記処理前の基板の撮像画像における画素値の面内傾向と、前記処理後の基板の撮像画像における画素値の面内傾向との相関分布を用いて決定される異常度に基づいて、モデル作成用の前記撮像画像セットを選択する、請求項16に記載の基板検査方法。 - 前記選択する工程は、
モデル作成用の前記撮像画像セットの候補として、複数の前記撮像画像セットを取得する工程と、
取得された前記撮像画像セットに含まれる前記基板の撮像画像毎に、当該撮像画像内の画素値の平面分布を、ゼルニケ多項式を用いて複数の画素値の面内傾向成分にそれぞれ分解し、各面内傾向成分のゼルニケ係数をそれぞれ算出する工程と、
ゼルニケ多項式における各項毎に、前記処理前の前記基板の撮像画像におけるゼルニケ係数と、前記処理後の前記基板の撮像画像におけるゼルニケ係数との相関分布に基づいて、前記撮像画像セットそれぞれのマハラノビス距離を算出する工程と、
前記撮像画像セットそれぞれについて、前記マハラノビス距離に基づいて、異常度を決定すると共に、前記異常度に基づいて、取得した前記撮像画像セットの中から、前記モデル作成用の前記撮像画像セットを抽出する工程と、を有する、請求項17に記載の基板検査方法。 - 基板検査処理をコンピュータにより実行させるためのコンピュータプログラムであって、
前記基板検査処理は、
複数の基板それぞれについての基板処理装置による処理前の撮像画像及び処理後の撮像画像を用いて機械学習により作成された画像推定モデルと、前記基板処理装置による処理前の検査対象基板の撮像画像と、に基づく、前記基板処理装置による処理後の前記検査対象基板の推定画像を取得し、
前記基板処理装置による処理後の前記検査対象基板の撮像画像と、前記推定画像とに基づいて、当該検査対象基板の欠陥の有無を判定する、処理を含むコンピュータプログラム。 - 基板を検査する際に用いられる、基板の撮像画像の推定モデルであって、
当該推定モデルは、
基板処理装置による処理前の検査対象基板の撮像画像から、前記基板処理装置による処理後の前記検査対象基板の撮像画像を推定するようにコンピュータを機能させるものであり、
複数の基板それぞれについての前記基板処理装置による処理前の撮像画像及び処理後の撮像画像を用いて、条件付き敵対的生成ネットワークによる機械学習によって作成され、
前記条件付き敵対的生成ネットワークにおいて、入力された任意の画像を変換して推定画像を生成する生成ネットワークであり、
前記条件付き敵対的生成ネットワークによる機械学習では、任意の画像と共に当該任意の画像に対応する基板処理後に撮影して得られた撮像画像または当該任意の画像に基づいて生成された前記推定画像が入力され、当該任意の画像と共に入力された画像が前記撮像画像であるか前記推定画像であるかの識別を行う識別ネットワークについて、前記識別が正確に行われるよう識別方法が学習され、且つ、前記生成ネットワークについて、前記識別ネットワークにおいて前記推定画像が前記撮像画像であると認識されるよう画像の変換方法が学習される、推定モデル。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022211579A JP7471387B2 (ja) | 2019-06-06 | 2022-12-28 | モデル作成装置、モデル作成方法及びコンピュータプログラム |
| JP2024062566A JP2024096135A (ja) | 2019-06-06 | 2024-04-09 | 基板検査装置 |
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019106292 | 2019-06-06 | ||
| JP2019106292 | 2019-06-06 | ||
| JP2020074213 | 2020-04-17 | ||
| JP2020074213 | 2020-04-17 | ||
| PCT/JP2020/021160 WO2020246366A1 (ja) | 2019-06-06 | 2020-05-28 | 基板検査装置、基板検査システム及び基板検査方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022211579A Division JP7471387B2 (ja) | 2019-06-06 | 2022-12-28 | モデル作成装置、モデル作成方法及びコンピュータプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2020246366A1 JPWO2020246366A1 (ja) | 2020-12-10 |
| JPWO2020246366A5 JPWO2020246366A5 (ja) | 2022-02-21 |
| JP7204911B2 true JP7204911B2 (ja) | 2023-01-16 |
Family
ID=73652946
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021524803A Active JP7204911B2 (ja) | 2019-06-06 | 2020-05-28 | 基板検査装置、基板検査システム及び基板検査方法 |
| JP2022211579A Active JP7471387B2 (ja) | 2019-06-06 | 2022-12-28 | モデル作成装置、モデル作成方法及びコンピュータプログラム |
| JP2024062566A Pending JP2024096135A (ja) | 2019-06-06 | 2024-04-09 | 基板検査装置 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022211579A Active JP7471387B2 (ja) | 2019-06-06 | 2022-12-28 | モデル作成装置、モデル作成方法及びコンピュータプログラム |
| JP2024062566A Pending JP2024096135A (ja) | 2019-06-06 | 2024-04-09 | 基板検査装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20220237770A1 (ja) |
| JP (3) | JP7204911B2 (ja) |
| KR (1) | KR20220019717A (ja) |
| CN (1) | CN113994255A (ja) |
| TW (1) | TWI845690B (ja) |
| WO (1) | WO2020246366A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12106468B2 (en) * | 2019-10-02 | 2024-10-01 | Prospection Solutions, LLC | Foreign material inspection system |
| JP7431694B2 (ja) * | 2020-07-28 | 2024-02-15 | キヤノン株式会社 | 情報処理装置、膜形成装置、物品の製造方法、およびプログラム |
| WO2023106157A1 (ja) * | 2021-12-10 | 2023-06-15 | 東京エレクトロン株式会社 | 基板検査方法、基板検査プログラム、及び基板検査装置 |
| WO2023120189A1 (ja) * | 2021-12-21 | 2023-06-29 | 東京エレクトロン株式会社 | 情報処理方法、情報処理装置及び記憶媒体 |
| US20230274986A1 (en) * | 2022-02-25 | 2023-08-31 | Globalwafers Co., Ltd. | Systems and methods for generating post-polishing topography for enhanced wafer manufacturing |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018211891A1 (ja) | 2017-05-18 | 2018-11-22 | 住友電気工業株式会社 | 異変検出装置及び異変検出方法 |
| JP2020050072A (ja) | 2018-09-26 | 2020-04-02 | しげる工業株式会社 | 車両用ドアトリムのアームレスト取付構造 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7860675B2 (en) | 2004-11-05 | 2010-12-28 | Nec Corporation | Pattern inspection apparatus, pattern inspection method, and pattern inspection program |
| JP2008002935A (ja) | 2006-06-22 | 2008-01-10 | Tokyo Seimitsu Co Ltd | 外観検査方法及び外観検査装置 |
| JP4448181B2 (ja) | 2008-03-18 | 2010-04-07 | アドバンスド・マスク・インスペクション・テクノロジー株式会社 | パターン検査方法、パターン検査装置及びプログラム |
| NL2003716A (en) * | 2008-11-24 | 2010-05-26 | Brion Tech Inc | Harmonic resist model for use in a lithographic apparatus and a device manufacturing method. |
| JP6004956B2 (ja) | 2013-01-29 | 2016-10-12 | 株式会社日立ハイテクノロジーズ | パターン評価装置、及び、パターン評価装置を備えた外観検査装置 |
| SG11201606207WA (en) * | 2014-02-12 | 2016-09-29 | Asml Netherlands Bv | Method of optimizing a process window |
| JP6251647B2 (ja) | 2014-07-15 | 2017-12-20 | 株式会社ニューフレアテクノロジー | マスク検査装置及びマスク検査方法 |
| US10514614B2 (en) * | 2015-02-13 | 2019-12-24 | Asml Netherlands B.V. | Process variability aware adaptive inspection and metrology |
| JP6244329B2 (ja) | 2015-05-12 | 2017-12-06 | 東京エレクトロン株式会社 | 基板の検査方法、基板処理システム及びコンピュータ記憶媒体 |
| US9915625B2 (en) * | 2016-01-04 | 2018-03-13 | Kla-Tencor Corp. | Optical die to database inspection |
| US10043261B2 (en) | 2016-01-11 | 2018-08-07 | Kla-Tencor Corp. | Generating simulated output for a specimen |
| JP6423064B2 (ja) * | 2017-11-13 | 2018-11-14 | 東京エレクトロン株式会社 | 基板処理システム |
| JP7002949B2 (ja) * | 2018-01-22 | 2022-01-20 | 株式会社日立ハイテク | 画像評価方法及び画像評価装置 |
| JP7190495B2 (ja) * | 2018-09-03 | 2022-12-15 | 株式会社Preferred Networks | 推論方法、推論装置、モデルの生成方法及び学習装置 |
-
2020
- 2020-05-26 TW TW109117460A patent/TWI845690B/zh active
- 2020-05-28 WO PCT/JP2020/021160 patent/WO2020246366A1/ja active Application Filing
- 2020-05-28 US US17/615,442 patent/US20220237770A1/en active Pending
- 2020-05-28 CN CN202080039553.1A patent/CN113994255A/zh active Pending
- 2020-05-28 JP JP2021524803A patent/JP7204911B2/ja active Active
- 2020-05-28 KR KR1020217042666A patent/KR20220019717A/ko unknown
-
2022
- 2022-12-28 JP JP2022211579A patent/JP7471387B2/ja active Active
-
2024
- 2024-04-09 JP JP2024062566A patent/JP2024096135A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018211891A1 (ja) | 2017-05-18 | 2018-11-22 | 住友電気工業株式会社 | 異変検出装置及び異変検出方法 |
| JP2020050072A (ja) | 2018-09-26 | 2020-04-02 | しげる工業株式会社 | 車両用ドアトリムのアームレスト取付構造 |
Non-Patent Citations (1)
| Title |
|---|
| 篠崎 隆志,深層学習周辺の最新動向,人工知能 第33巻 第2号,日本,一般社団法人人工知能学会 JSAI(The Japanese Societ,2018年03月01日,181-188 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20220019717A (ko) | 2022-02-17 |
| JP2023052161A (ja) | 2023-04-11 |
| JP2024096135A (ja) | 2024-07-12 |
| US20220237770A1 (en) | 2022-07-28 |
| WO2020246366A1 (ja) | 2020-12-10 |
| JPWO2020246366A1 (ja) | 2020-12-10 |
| CN113994255A (zh) | 2022-01-28 |
| TWI845690B (zh) | 2024-06-21 |
| JP7471387B2 (ja) | 2024-04-19 |
| TW202115390A (zh) | 2021-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7204911B2 (ja) | 基板検査装置、基板検査システム及び基板検査方法 | |
| US20220101517A1 (en) | Substrate defect inspection apparatus, substrate defect inspection method, and storage medium | |
| US11513081B2 (en) | Substrate inspection method, substrate treatment system, and computer storage medium | |
| KR101922347B1 (ko) | 검사 장치 및 기판 처리 장치 | |
| US9146479B2 (en) | Substrate reference image creation method, substrate defect inspection method, substrate reference image creation apparatus, substrate defect inspection unit and non-transitory computer storage medium | |
| KR101396907B1 (ko) | 결함 분류 방법, 컴퓨터 기억 매체 및 결함 분류 장치 | |
| JP7157580B2 (ja) | 基板検査方法及び基板検査装置 | |
| KR20200140201A (ko) | 기판 검사 방법, 기판 검사 시스템 및 제어 장치 | |
| TW202434878A (zh) | 模型作成裝置、模型作成方法及電腦程式 | |
| JP2021097218A (ja) | 基板処理方法及び基板処理システム | |
| WO2024101186A1 (ja) | 基板検査方法、基板検査装置、及び基板検査プログラム | |
| JP2022189284A (ja) | 基板検査装置、基板検査方法及び記憶媒体 | |
| JP7425700B2 (ja) | 形状特性値推定装置、形状特性値推定方法、及び記憶媒体 | |
| TW202345210A (zh) | 資訊處理方法、資訊處理裝置及記憶媒體 | |
| TW202431460A (zh) | 基板檢查方法、基板檢查裝置及基板檢查程式 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211124 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211124 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221206 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221228 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7204911 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |